CN112081439B - Method for storing and taking vehicles by using transverse moving trolley with telescopic automatic leveling device - Google Patents
Method for storing and taking vehicles by using transverse moving trolley with telescopic automatic leveling device Download PDFInfo
- Publication number
- CN112081439B CN112081439B CN202010970163.8A CN202010970163A CN112081439B CN 112081439 B CN112081439 B CN 112081439B CN 202010970163 A CN202010970163 A CN 202010970163A CN 112081439 B CN112081439 B CN 112081439B
- Authority
- CN
- China
- Prior art keywords
- leveling
- lifting
- lifting frame
- telescopic
- control system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims abstract description 29
- 230000007246 mechanism Effects 0.000 claims abstract description 127
- 229910000831 Steel Inorganic materials 0.000 claims abstract description 52
- 239000010959 steel Substances 0.000 claims abstract description 52
- 230000033001 locomotion Effects 0.000 claims abstract description 7
- 230000005540 biological transmission Effects 0.000 claims description 37
- 230000007704 transition Effects 0.000 claims description 12
- 230000009467 reduction Effects 0.000 claims description 10
- 230000008859 change Effects 0.000 abstract description 5
- 238000001514 detection method Methods 0.000 description 9
- 230000008569 process Effects 0.000 description 7
- 238000004519 manufacturing process Methods 0.000 description 5
- 230000009471 action Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 239000000969 carrier Substances 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 230000001360 synchronised effect Effects 0.000 description 3
- 230000007547 defect Effects 0.000 description 2
- 230000003028 elevating effect Effects 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 244000126211 Hericium coralloides Species 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 239000003638 chemical reducing agent Substances 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
Images



Classifications
-
- E—FIXED CONSTRUCTIONS
- E04—BUILDING
- E04H—BUILDINGS OR LIKE STRUCTURES FOR PARTICULAR PURPOSES; SWIMMING OR SPLASH BATHS OR POOLS; MASTS; FENCING; TENTS OR CANOPIES, IN GENERAL
- E04H6/00—Buildings for parking cars, rolling-stock, aircraft, vessels or like vehicles, e.g. garages
- E04H6/08—Garages for many vehicles
- E04H6/12—Garages for many vehicles with mechanical means for shifting or lifting vehicles
- E04H6/18—Garages for many vehicles with mechanical means for shifting or lifting vehicles with means for transport in vertical direction only or independently in vertical and horizontal directions
- E04H6/24—Garages for many vehicles with mechanical means for shifting or lifting vehicles with means for transport in vertical direction only or independently in vertical and horizontal directions characterised by use of dollies for horizontal transport, i.e. cars being permanently parked on wheeled platforms
-
- E—FIXED CONSTRUCTIONS
- E04—BUILDING
- E04H—BUILDINGS OR LIKE STRUCTURES FOR PARTICULAR PURPOSES; SWIMMING OR SPLASH BATHS OR POOLS; MASTS; FENCING; TENTS OR CANOPIES, IN GENERAL
- E04H6/00—Buildings for parking cars, rolling-stock, aircraft, vessels or like vehicles, e.g. garages
- E04H6/08—Garages for many vehicles
- E04H6/12—Garages for many vehicles with mechanical means for shifting or lifting vehicles
- E04H6/18—Garages for many vehicles with mechanical means for shifting or lifting vehicles with means for transport in vertical direction only or independently in vertical and horizontal directions
-
- E—FIXED CONSTRUCTIONS
- E04—BUILDING
- E04H—BUILDINGS OR LIKE STRUCTURES FOR PARTICULAR PURPOSES; SWIMMING OR SPLASH BATHS OR POOLS; MASTS; FENCING; TENTS OR CANOPIES, IN GENERAL
- E04H6/00—Buildings for parking cars, rolling-stock, aircraft, vessels or like vehicles, e.g. garages
- E04H6/42—Devices or arrangements peculiar to garages, not covered elsewhere, e.g. securing devices, safety devices, monitoring and operating schemes; centering devices
- E04H6/422—Automatically operated car-parks
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Vehicle Cleaning, Maintenance, Repair, Refitting, And Outriggers (AREA)
Abstract
The invention discloses a method for storing and taking vehicles by a transverse moving trolley with a telescopic automatic leveling device. The vehicle is stored and taken by adopting a transverse moving trolley for vertical lifting mechanical parking equipment with a telescopic automatic leveling device, a lifting frame, a chassis and a carrier track are arranged on the lifting frame, an active walking system drives the transverse moving trolley to move back and forth along a guide rail on a lifting car, and the carrier can move left and right on the lifting frame along the carrier track; a lifting device is arranged between the lifting frame and the chassis, the lifting frame is driven to do lifting motion relative to the chassis, and a set of telescopic leveling mechanism capable of independently operating is respectively arranged at the left end and the right end of the lifting frame; the flat bed positioning device of each parking space is omitted, when vehicles are parked and taken out, the lifting frame is separated from the chassis after being leveled, the load of the lifting frame acts on a steel structure frame of the mechanical parking equipment, although the length of the chain or the steel wire rope can be changed, the change of the upper position and the lower position of the chassis can be only caused, the lifting frame is not influenced, and the leveling precision can not be reduced.
Description
Technical Field
The invention relates to a method for parking and taking out vehicles, in particular to a method for parking and taking out vehicles by a transverse moving trolley with an automatic leveling device, and belongs to the technical field of multi-layer (high-rise) vertical lifting mechanical three-dimensional parking equipment.
Background
The vertical lifting large-car type tower garage is mechanical parking equipment which can move vehicles on a car by using a transverse trolley plane and realize parking and taking, belongs to a common machine type in storage type parking equipment, and has the characteristics of high intelligence, high-precision control, high-speed operation, large-scale compact design, various forms and the like. The equipment can be combined in various systems according to objective conditions such as buildings, environments and the like, so that the requirement of customers is met to the maximum extent, and the equipment is widely suitable for different areas of cities such as airports, stations, busy commercial areas, stadiums, office buildings and the like, and is one of the most ideal types in mechanical parking garages.
The main components of the equipment are as follows: the intelligent conveying device comprises a steel framework, a lifting driving system, a lifting car, an access device (a built-in rotary table), a transverse moving trolley (or called conveying trolley, a roadway conveyor and a middle sports car), an electrical control system and the like, wherein the intelligent conveyor is arranged on the transverse moving trolley.
The operation principle is as follows: the moving of vehicles in the same parking floor is completed by the transverse moving trolley, the up-down lifting action of the vehicles is completed by the lifting car, the top of the steel structure is provided with a lifting driving system, the lifting driving system drives the lifting chain, the lifting chain is connected with a lifting point seat on the lifting car, the lifting car is driven to move up and down along a vertical track arranged on the steel structure, the processes of storing and taking the vehicles in the multi-layer vertical lifting garage are realized through the cooperation of the lifting driving system and the lifting driving system, and the vehicles are exchanged by an intelligent carrier on the transverse moving trolley and a parking space.
Parking operation: the driver drives the car to the garage and the garage door opens. Under the prompt of the automatic parking guidance indication screen in the garage, a driver drives a vehicle into the entrance, and at the moment, the detection device measures the length, width and height of the vehicle to determine whether the vehicle is suitable for the garage. Then the driver extinguishes, pulls the brake, gets off the vehicle, locks the vehicle door and exits the garage; the personnel detection device can find whether the parking personnel still exist in the garage, when the safety detection fails, the system can send out a warning ring, and the central control room can inform a manager and a driver of adjusting the vehicle or cleaning the personnel through an interphone or a loudspeaker; when the safety detection is passed, the garage door is closed. The lifting car drives the transverse moving trolley to move to an entrance layer, the transverse moving trolley moves to a position corresponding to the entrance, the carrier carries the vehicle at the entrance to the transverse moving trolley of the lifting car, the lifting car carries the vehicle to lift to an appointed parking layer, and finally the intelligent carrier translates the vehicle to an appointed vacant parking space, so that the equipment finishes parking.
Vehicle taking operation: the driver or garage manager inserts a parking card on the control panel, or inputs an instruction on the operation panel. The lifting car is lifted to an appointed parking layer, the transverse moving trolley is moved to a position corresponding to a parking space, the vehicle in the appointed parking space is conveyed to the transverse moving trolley of the lifting car by the conveyor, then the lifting car carries the vehicle to be lifted to an entrance layer, the transverse moving trolley is moved to a position corresponding to the entrance, the vehicle is conveyed to an exit by the conveyor, then the garage door is automatically opened, and a driver drives the vehicle out to finish vehicle taking.
It can be seen that, in the operation process of the automatic mechanical parking equipment, the traversing trolley undertakes important tasks, the carrier and the vehicle on the carrier need to be transported to a specified parking space, when the traversing trolley is butted with a parking space guide rail, the walking track of the carrier and the parking space guide rail are in the same plane, so that the stable operation of the carrier can be ensured.
In order to solve the problems, the applicant of the invention patent application number 2019108250474 on 2019, 9, 3 and named as a transverse moving trolley with a swing arm type automatic leveling device for car type mechanical parking equipment comprises a chassis, a traveling system arranged on the chassis, a carrier guide rail, a carrier traveling rail and a control system, wherein the traveling system drives the transverse moving trolley to move back and forth along a guide rail on a lifting car, the carrier can move left and right on the chassis along the guide rail and the traveling rail, and a set of swing arm type leveling mechanisms capable of operating independently is respectively arranged at the left end and the right end of the transverse moving trolley. The flat-layer positioning device of each parking space is omitted, so that the equipment has the advantages of simpler structure, low production cost, high installation efficiency and convenient debugging, and the walking track of the carrier and the guide rail of the parking space can automatically perform flat-layer action within a certain deviation range. The left end and the right end of the transverse moving trolley are respectively provided with a set of swing arm type leveling mechanism capable of independently operating, the left end and the right end of the transverse moving trolley can be subjected to leveling positioning, only the swing arm type leveling mechanism at the parking space side for parking a vehicle is required to work under normal conditions, when a target parking space is positioned on the left side of a roadway, only the swing arm type leveling mechanism at the left end of the transverse moving trolley is required to act, and when the target parking space is positioned on the right side of the roadway, only the swing arm type leveling mechanism at the right end of the transverse moving trolley is required to act. The method for storing and taking the vehicle still has a part to be improved, for example, the leveling arm swings under the driving of the swing arm driving motor and is abutted against a beam of a steel structure of the three-dimensional parking equipment, one end of the chassis is lifted, so that a carrier walking track and a left parking space guide rail are positioned on the same plane, and the leveling function is realized; the chassis needs to overcome the self weight of the chassis and the weight of a vehicle and a carrier in the lifting process, a large motor and a speed reducer are needed, and the manufacturing and using cost is high; when the leveling arm is abutted against the cross beam, the impact is applied to the cross beam, and noise and vibration can be generated; the lifting car is driven to ascend and descend by a chain or a steel wire rope through a lifting driving system arranged at the top of the steel structure, after leveling, when a vehicle is stored and taken out, the vehicle is carried to or from a transverse moving trolley of the lifting car by a carrier, the load on the lifting car is changed, the elongation of the chain or the steel wire rope is changed accordingly, the relative position of a track of the intelligent carrier on the transverse moving trolley and a guide rail on a parking space or an access platform is in a changed state, and the leveling precision is reduced.
CN207436611U also discloses a lifting and leveling positioning safety device for an intelligent mechanical garage, which comprises a plurality of lifting columns 18, a lifting tray 17 which performs lifting movement along the lifting columns 18, a speed reducing motor fixing seat 16 fixed at the bottom of the lifting tray 17, a speed reducing motor 15 fixed on the fixing seat 16, a synchronous transmission mechanism connected with the speed reducing motor 15, and a plurality of positioning mechanisms, wherein each positioning mechanism comprises a telescopic rod 5 with a guiding function, and a male tooth-shaped positioning block 2 and a female tooth-shaped positioning block 1 which are pushed by the telescopic rod 5 to be engaged with each other, the telescopic rod 5 is connected with the output end of the synchronous transmission mechanism, and the male tooth-shaped positioning block 2 is fixed on the telescopic rod 5; the female tooth-shaped positioning block 1 is fixed on the elevator upright post 18, and a positioning round hole is formed in the female tooth-shaped positioning block 1; the part of the telescopic rod 5 extending to the outer end of the male tooth-shaped positioning block 2 is in a cylindrical shape corresponding to the positioning round hole. The gear motor 15 drives the telescopic rod 5 with the guiding function to stretch through the synchronous transmission mechanism, the telescopic rod 5 can drive the male tooth-shaped positioning block 2 to be meshed with the female tooth-shaped positioning block 1 as the male tooth-shaped positioning block 2 is fixed on the telescopic rod 5, and meanwhile, the telescopic rod 5 is just inserted into the positioning round hole in the female tooth-shaped positioning block 1 as the part of the telescopic rod 5 extending to the outer end of the male tooth-shaped positioning block 2 is in a cylindrical shape corresponding to the positioning round hole. The positioning round hole is matched with the telescopic rod 5 to ensure the precision of the leveling device, and the positioning error is within the range of 0.1mm (paragraph 0031 and 0032). Its structure does not get rid of the flat bed locate mode of current bolt mode, and this technical scheme's contribution has increased the profile of tooth locating piece, "the profile of tooth locating piece can prevent that the lift tray from upwards playing downwards with the compound setting of location round hole, realizes the function of lift tray bidirectional positioning, and the device location is accurate, and the profile of tooth locating piece can prevent to use for a long time that jack department can wear and tear and lead to the aperture grow location inaccurate, the not long scheduling problem of life. But the technical proposal has obvious defects, and the premise of achieving the technical effect is to ensure that 4 telescopic rods 5 can be smoothly inserted into the positioning round holes, as is well known, the weight of the pallet is relatively heavy, and some pallets are even several tons (paragraph 0033), the elevator car/pallet is driven to ascend and descend by chains or steel cables through an elevating driving system arranged on the top of a steel structure, and the elongation of the 4 chains or steel cables for elevating the elevator car changes along with the time, the elongation of 4 chains or steel wire ropes cannot be completely consistent, so that the heights of 4 hoisting points generate errors, 4 telescopic rods 5 cannot be inserted into the positioning round holes simultaneously and smoothly, especially, the technical scheme has the gap of only 0.1mm, and 4 telescopic rods 5 are difficult to insert into the positioning round holes simultaneously and are limited by the elongation change of the chains or the steel wire ropes.
Disclosure of Invention
The invention aims to overcome the defects of the prior art and provide a method for storing and taking vehicles by a transverse moving trolley with a telescopic automatic leveling device, which has low manufacturing and using cost and high leveling precision. The problem that when the action of storing and taking out the vehicle is carried out, the vehicle is carried to or is moved away from the transverse moving trolley of the lifting car by the carrier, the load on the lifting car is changed, the elongation of a chain or a steel wire rope is changed along with the change of the load, the relative position of a track of the intelligent carrier on the transverse moving trolley and a guide rail on a parking space or an entrance platform is in a changed state, and the leveling precision is reduced in the prior art is solved.
The invention relates to a leveling device and a lifting car, which are separated from each other, so that the influence of the change of the elongation of a chain or a steel wire rope on the leveling precision is eliminated.
The technical scheme adopted by the invention for realizing the purpose is as follows:
a method for storing a transverse moving trolley into a vehicle with a telescopic automatic leveling device is characterized in that: the method adopts a transverse moving trolley with a telescopic automatic leveling device to store vehicles, and comprises the following specific steps:
(1) the transverse moving trolley moves to the garage entrance for parking the vehicle, the control system controls the lifting device to work, and the lifting frame is jacked up, so that the lower plane of the lifting frame is higher than the entrance platform;
the transverse moving trolley with the telescopic automatic leveling device comprises a chassis, a traveling system arranged on the chassis and a carrier rail, wherein the traveling system drives the transverse moving trolley to move back and forth along a guide rail on a lifting car, the carrier can move left and right along the carrier rail, the transverse moving trolley further comprises a lifting frame, the carrier rail is arranged on the lifting frame, a lifting device is arranged between the lifting frame and the chassis, the lifting device drives the lifting frame to do lifting motion relative to the chassis, a telescopic leveling mechanism is arranged on the lifting frame, and the load of the lifting frame acts on a steel structure frame of mechanical parking equipment when the leveling mechanism works; the telescopic leveling mechanism comprises a leveling arm and a driving mechanism for driving the leveling arm to extend or retract;
(2) the control system controls the driving mechanism to work, and a leveling arm of the leveling mechanism extends out;
(3) the control system controls the lifting device to work, so that the lifting frame descends, the leveling arm is lapped on the inlet platform, and the carrier track on the lifting frame and the inlet platform guide rail are positioned on the same plane, so that the leveling function is realized;
(4) the control system starts the carrier, carries the vehicles parked on the entrance platform onto the carrier, and then returns to the transverse moving trolley together;
(5) the control system controls the lifting device to work so as to lift the lifting frame;
(6) the control system controls the driving mechanism to work, and the leveling arm of the leveling mechanism retracts;
(7) the control system controls the lifting device to work, so that the lifting frame descends and is positioned at a low position;
(8) the main lifting driving system lifts the lifting car to a target parking layer, and the transverse moving trolley carries the carrier and the vehicle to jointly move to a designated parking space;
(9) the control system controls the lifting device to work, and jacks up the lifting frame, so that the lower plane of the lifting frame is higher than the cross beam of the steel structure of the three-dimensional parking equipment;
(10) the control system controls the driving mechanism to work, and a leveling arm of the leveling mechanism extends out;
(11) the control system controls the lifting device to work, so that the lifting frame descends, the leveling arm is lapped on a cross beam of a steel structure of the three-dimensional parking equipment, and a carrier rail on the lifting frame and a parking space guide rail are positioned on the same plane, so that the leveling function is realized;
(12) the control system starts the carrier, and the carrier returns the vehicle to the transverse trolley after carrying the vehicle to the parking space;
(13) the control system controls the lifting device to work so as to lift the lifting frame;
(14) the control system controls the driving mechanism to work, and the leveling arm of the leveling mechanism retracts;
(15) the control system controls the lifting device to work, so that the lifting frame descends, is at a low position and recovers to an initial state.
A method for taking out vehicles by a traversing trolley with a telescopic automatic leveling device is characterized in that: the method adopts a transverse moving trolley with a telescopic automatic leveling device to take out vehicles, and comprises the following specific steps:
(1) the main lifting driving system lifts the lifting car to a target parking layer, and the transverse moving trolley carries the carrier to jointly move to a parking space for storing the vehicles;
the transverse moving trolley with the telescopic automatic leveling device comprises a chassis, a traveling system arranged on the chassis and a carrier rail, wherein the traveling system drives the transverse moving trolley to move back and forth along a guide rail on a lifting car, the carrier can move left and right along the carrier rail, the transverse moving trolley further comprises a lifting frame, the carrier rail is arranged on the lifting frame, a lifting device is arranged between the lifting frame and the chassis, the lifting device drives the lifting frame to do lifting motion relative to the chassis, a telescopic leveling mechanism is arranged on the lifting frame, and the load of the lifting frame acts on a steel structure frame of mechanical parking equipment when the leveling mechanism works; the telescopic leveling mechanism comprises a leveling arm and a driving mechanism for driving the leveling arm to extend or retract;
(2) the control system controls the lifting device to work, and jacks up the lifting frame, so that the lower plane of the lifting frame is higher than the cross beam of the steel structure of the three-dimensional parking equipment;
(3) the control system controls the driving mechanism to work, and a leveling arm of the leveling mechanism extends out;
(4) the control system controls the lifting device to work, so that the lifting frame descends, the leveling arm is lapped on a cross beam of a steel structure of the three-dimensional parking equipment, and a carrier rail on the lifting frame and a parking space guide rail are positioned on the same plane, so that the leveling function is realized;
(5) the control system starts the carrier, carries the vehicles parked on the parking spaces to the carrier, and then returns to the transverse trolley together;
(6) the control system controls the lifting device to work so as to lift the lifting frame;
(7) the control system controls the driving mechanism to work, and the leveling arm of the leveling mechanism retracts;
(8) the control system controls the lifting device to work, so that the lifting frame descends and is positioned at a low position;
(9) the main lifting driving system moves the lifting car to a parking layer where the exit is located, and the transverse moving trolley carries the carrier and the vehicle to move together to a position corresponding to the exit;
(10) the control system controls the lifting device to work, and jacks up the lifting frame, so that the lower plane of the lifting frame is higher than the outlet platform;
(11) the control system controls the driving mechanism to work, and a leveling arm of the leveling mechanism extends out;
(12) the control system controls the lifting device to work, so that the lifting frame descends, the leveling arm is lapped on the outlet platform, and the carrier track on the lifting frame and the outlet platform guide rail are positioned on the same plane, so that the leveling function is realized;
(13) the control system starts the carrier, and the carrier conveys the vehicle to the outlet platform and then returns to the transverse moving trolley;
(14) the control system controls the lifting device to work so as to lift the lifting frame;
(15) the control system controls the driving mechanism to work, and the leveling arm of the leveling mechanism retracts;
(16) the control system controls the lifting device to work, so that the lifting frame descends, is at a low position and recovers to an initial state;
(17) the garage door opens automatically and the driver drives the car out of the exit.
By adopting the technical scheme, the flat-layer positioning device of each parking space is omitted, so that the equipment is simpler in structure, low in production cost, high in installation efficiency and convenient to debug. The lifting frame is provided with a telescopic leveling mechanism, the load of the lifting frame acts on a steel structure framework of the mechanical parking equipment when the leveling mechanism works, when the vehicle is stored and taken out, the vehicle is conveyed to the lifting frame or is conveyed away from the lifting frame by the carrier, the load on the lifting car is not changed, the elongation of a chain or a steel wire rope is not changed, the relative position of the track of the intelligent carrier on the transverse moving trolley and the guide rail on the parking space or the access platform is not changed, and the leveling precision is high.
The lifting device comprises a left lifting device and a right lifting device, the left lifting device and the right lifting device have the same structure and respectively comprise a positioning block, a lifting device and a lifting speed reduction motor, the lifting device and the lifting speed reduction motor are fixed on the chassis, an output shaft of the lifting speed reduction motor is a double-shaft extension, two ends of the double-shaft extension are respectively connected with one end of a first transmission shaft, the other end of the first transmission shaft is connected with an input end of the lifting device, and the end part of the output shaft of the lifting device is connected with a positioning shaft; the upper end of the positioning block is connected with the lifting frame, and the lower end of the positioning block is provided with a positioning groove corresponding to the positioning shaft.
By adopting the technical scheme, the lower part of the lifting frame is connected with a positioning block with a positioning groove at the lower end, and the end part of the output shaft of the lifter is connected with a positioning shaft; when the output shaft of the lifter rises, the positioning shaft at the upper end of the lifter enters the positioning groove of the positioning block to jack the lifting frame, the positioning groove can limit the lifting frame to move in the left-right direction, and the lifting frame is continuously jacked to enable the lower plane of the lifting frame to be higher than the cross beam of the steel structure of the three-dimensional parking equipment; when the telescopic leveling mechanism works, the leveling arm extends out, the output shaft of the lifter descends, the positioning shaft is separated from the positioning groove of the positioning block, and the leveling arm is lapped on a beam of a steel structure of the three-dimensional parking equipment to realize the leveling function; because the lifter is fixed on the chassis, the positioning shaft is in open insertion connection with the positioning groove of the positioning block, the lifting frame is separated from the chassis after leveling, when the vehicle is stored and taken, the length of the chain or the steel wire rope can be changed, but the change of the upper position and the lower position of the chassis can be caused, the lifting frame is not influenced, and the leveling precision can not be reduced.
Furthermore, the vertical section of the upper end part of the output shaft of the lifter is in an inverted V shape, the positioning shaft penetrates through the inclined plane of the inverted V shape, and the lower end of the positioning block and the upper end part of the output shaft of the lifter are correspondingly provided with a groove with the inverted V-shaped vertical section.
By adopting the technical scheme, when the output shaft of the lifter is lifted, the upper end of the output shaft is inserted into the groove with the inverted V-shaped vertical section at the lower end of the positioning block, and the inclined planes of the two V-shaped grooves are attached to each other, so that the lifting frame can be limited to move in the front-back direction.
The method for storing and taking out the vehicles by the transverse moving trolley with the telescopic automatic leveling device comprises the following steps that the telescopic leveling mechanism comprises a left telescopic leveling mechanism and a right telescopic leveling mechanism, the left telescopic leveling mechanism and the right telescopic leveling mechanism have the same structure and respectively comprise a leveling arm and a driving mechanism for driving the leveling arm to extend or retract; the left telescopic leveling mechanism and the right telescopic leveling mechanism are respectively arranged at the left end and the right end of the lifting frame and can independently operate.
Two ends set up one set of telescopic mechanism that can independently operate respectively about the sideslip platform truck, and both ends all can carry out the flat bed location about, and two sets of telescopic mechanism of controlling all work under normal condition. Under special conditions, when a parking space is arranged on only one side of a roadway, if the parking space is arranged on only the left side, the left lifting device at the left end of the trolley and the left telescopic leveling mechanism only need to be transversely moved, a lifting speed reduction motor of the left lifting device drives the lifter to work, a positioning shaft at the upper end of the lifter enters a positioning groove of a positioning block when an output shaft of the lifter is lifted, the left end of the lifter is jacked up, the lower plane at the left end of the lifter is higher than a cross beam of a steel structure of the three-dimensional parking equipment, and the positioning groove can limit the lifter to move in the left and right directions; in the jacking process, a positioning block at the right end of the lifting frame rotates around a corresponding positioning shaft; the telescopic leveling mechanism of left side work, and the leveling arm stretches out, and the output shaft of lift descends, and the location axle breaks away from the constant head tank of locating piece, and leveling arm overlap joint realizes the leveling function on the crossbeam of sky parking equipment steel construction.
Furthermore, each telescopic leveling mechanism comprises 2 leveling arms which are symmetrically arranged front and back, the leveling arms can be slidably arranged on the lifting frame, and the driving mechanism can drive the 2 leveling arms to extend out or retract.
Through adopting above-mentioned technical scheme, 2 flat layer arms share one set of actuating mechanism, simple structure, and the synchronism is good.
Furthermore, a sliding block is connected on the flat layer arm, the sliding block can slide along a guide shaft, two ends of the guide shaft are connected on the lifting frame through a guide shaft seat, the driving mechanism comprises,
a flat layer gear motor connected to the lifting frame, an output shaft of the flat layer gear motor is a double-shaft extension, two ends of the double-shaft extension are respectively connected with one end of a second transmission shaft,
a rack guide seat connected to the lifting frame and provided with a guide sleeve,
one end of the rack shaft is connected with the inner end of the flat layer arm and can slide along the inner hole of the guide sleeve,
a bearing seat connected with the lifting frame,
one end of the second transmission shaft is connected with an output shaft of the flat-layer speed reduction motor, the other end of the second transmission shaft is rotatably connected on the bearing seat and the end part of the second transmission shaft is connected with a driving gear,
the transition gear is meshed with the driving gear and the rack shaft and is rotatably connected to one end of the gear shaft, and the other end of the gear shaft is fixedly connected to the lifting frame;
the leveling speed reducing motor rotates to drive the second transmission shaft to rotate, the driving gear at the end part of the second transmission shaft drives the transition gear to rotate, and the transition gear drives the leveling arm to extend or retract through the rack shaft;
when the telescopic leveling mechanism does not work, the leveling arm is in a retraction state;
when the telescopic leveling mechanism works, the leveling arm gradually extends out, the lifting device drives the lifting frame to descend, the outer end of the leveling arm is overlapped on a beam of a steel structure of the three-dimensional parking equipment, the lifting frame is separated from the chassis, and a carrier track on the lifting frame and a parking space guide rail/entrance platform guide rail are positioned on the same plane, so that the leveling function is realized.
By adopting the technical scheme, when the transverse moving trolley moves to the position corresponding to the target parking space, the lifting frame is jacked up by the lifter, and the lower plane of the lifting frame is higher than the cross beam of the steel structure of the three-dimensional parking equipment; when the telescopic leveling mechanism works, the leveling arm extends out, then the lifting frame descends along with the output shaft of the lifter, and the leveling arm is lapped on a cross beam of a steel structure of the three-dimensional parking equipment, so that a carrier rail on the lifting frame and a parking space guide rail are positioned on the same plane, and the leveling function is realized.
The invention has the beneficial effects that:
1. a flat-layer positioning device of each parking space is omitted, so that the equipment has simpler structure, low production cost, high installation efficiency and convenient debugging;
2. two ends set up one set of telescopic mechanism that can independently operate respectively about the sideslip platform truck, and both ends all can carry out the flat bed location about, and two sets of telescopic mechanism of controlling all work under normal condition. Under special conditions, when a parking space is arranged on one side of a roadway, only a lifting device and a telescopic leveling mechanism on one side of the parking space need to be arranged to work;
3. the lifting frame is separated from the chassis after leveling, and the load of the lifting frame acts on the steel structure framework of the mechanical parking equipment. When the vehicle is stored and taken out, the length of the chain or the steel wire rope can be changed, but the vertical position of the chassis can be changed, the lifting frame is not affected, and the leveling precision cannot be reduced.
Drawings
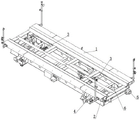
FIG. 1 is an axial view of the present invention (with the lay flat arms not extended).
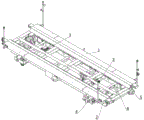
Fig. 2 is an axial schematic view of the present invention (flat arm extended).
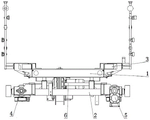
Figure 3 is a schematic side view of the invention (crane in lower position).
Figure 4 is a schematic side view of the invention (crane in the raised position).
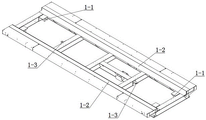
Figure 5 is a schematic view of the crane of the present invention.
Fig. 6 is a schematic view of a chassis in the present invention.
FIG. 7 is an axial view of the telescopic leveling mechanism of the present invention.
Fig. 8 is a schematic axial view of the lifting device of the present invention.
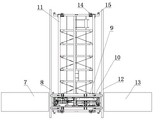
Fig. 9 is a side view of the present invention and a car and parking space.
Fig. 10 is a plan view of the present invention in conjunction with a car and parking space.
In the figure: 1 lifting frame, 1-1 positioning block, 1-2 carrier track, 1-3 motor mounting plate,
2 chassis, 2-1 lifting device mounting base,
3 telescopic leveling mechanism, 3-1 leveling arm, 3-2 rack shaft, 3-3 rack guide seat, 3-4 transition gear, 3-5 driving gear, 3-6 second transmission shaft, 3-7 leveling gear motor, 3-8 guide shaft, 3-9 slide block, 3-10 guide shaft seat and 3-11 bearing seat,
4 a passive walking system, 5 an active walking system,
a 6 lifting device, a 6-1 first transmission shaft, a 6-2 lifter, an output shaft of the 6-3 lifter, a 6-4 positioning shaft, a 6-5 lifting speed reducing motor,
7 left parking spaces, 8 steel structure left beams, 9 transverse trolleys, 10 carriers, 11 lifting cars, 12 steel structure right beams, 13 right parking spaces, 14 vertical rails and 15 hoisting point seats.
Detailed Description
In order to clearly illustrate the technical features of the present solution, the present invention is further illustrated by the following non-limiting examples in combination with the accompanying drawings.
The front, rear, left and right directions of the present invention are described with reference to the front, rear, left and right directions shown in the drawings. For ease of illustration, only the portions relevant to the embodiments of the present invention are shown.
The first embodiment is as follows:
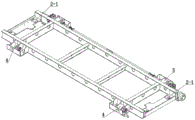
a method for storing a traverse trolley with a telescopic automatic leveling device into a vehicle adopts the traverse trolley with the telescopic automatic leveling device to store the vehicle, and figures 1 to 8 are schematic diagrams of the traverse trolley for vertical lifting mechanical parking equipment with the telescopic automatic leveling device, and comprise a lifting frame 1, a chassis 2 and a control system, wherein a carrier track 1-2 is arranged on the lifting frame 1, and a passive walking system 4 and an active walking system 5 are arranged on the chassis 2; the active traveling system 5 drives the transverse moving trolley 9 to move back and forth along the guide rail on the lifting car 11, and the carrier 10 can move left and right on the lifting frame 1 along the carrier track 1-2;
the traverse trolley 9 is provided with a power supply system, a guardrail, a laser distance measuring device, a detection system such as a vacancy detection device (whether a vehicle exists on a parking space), a vehicle overlong detection device, a vehicle detection device (whether a vehicle exists on the carrier 10), a carrier detection device (whether a carrier 10 exists on the traverse trolley 9) and the like, a wireless communication receiving system and a control system which are all modularized general parts, wherein the control system of the embodiment comprises a PLC, a relay and the like and is arranged in an electric control cabinet (not shown in the figure) in the power supply system.
Referring to fig. 8, a lifting device 6 is arranged between the lifting frame 1 and the chassis 2, and the lifting device 6 drives the lifting frame 1 to perform lifting motion relative to the chassis 2; the lifting device 6 comprises a left lifting device and a right lifting device, the left lifting device and the right lifting device are respectively arranged at two ends of the chassis 2 through a lifting device mounting seat 2-1, the left lifting device comprises a positioning block 1-1, a lifter 6-2 and a lifting speed reduction motor 6-5, the lifter 6-2 and the lifting speed reduction motor 6-5 are fixed on the chassis 2, an output shaft of the lifting speed reduction motor 6-5 is a double-shaft extension, two ends of the double-shaft extension are respectively connected with one end of a first transmission shaft 6-1, the other end of the first transmission shaft 6-1 is connected with an input end of the lifter 6-2, and the end part of an output shaft 6-3 of the lifter is connected with a positioning shaft 6-4; the upper end of the positioning block 1-1 is connected with the lifting frame 1, and the lower end is provided with a positioning groove with a downward opening corresponding to the positioning shaft 6-4 and used for positioning the lifting frame 1 in the left and right directions. The lifter 6-2 is a prior art, such as the utility model No. 201520766666.8 obtained by the applicant, and is not described in detail.
In this embodiment, the output end of the lifting gear motor 6-5 may also be a hollow output shaft and have a structure with a key slot, the first transmission shaft 6-1 matched with the hollow output shaft is a solid shaft with a flat key, and the first transmission shaft 6-1 is connected with the hollow output shaft of the lifting gear motor 6-5 through a key and is radially fixed.
In the embodiment, the vertical section of the upper end part of the output shaft of the lifter is in an inverted V shape, the positioning shaft 6-4 penetrates through the inclined plane of the inverted V shape, and the lower end of the positioning block 1-1 and the upper end part of the output shaft of the lifter are correspondingly provided with a groove with the inverted V-shaped vertical section. When the output shaft 6-3 of the lifter rises, the upper end of the output shaft is inserted into the groove with the inverted V-shaped vertical section at the lower end of the positioning block 1-1, and the two V-shaped inclined planes are attached to each other, so that the lifter 1 can be positioned in the front-back direction. The right lifting device and the left lifting device have the same structure and are not described again.
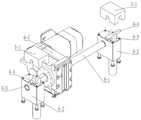
The left and right ends of the lifting frame 1 are respectively provided with a set of telescopic leveling mechanism 3 capable of independently operating, the telescopic leveling mechanism comprises a left telescopic leveling mechanism and a right telescopic leveling mechanism, the left telescopic leveling mechanism and the right telescopic leveling mechanism are identical in structure and are universal components in the transverse moving trolley 9, the telescopic leveling mechanism is suitable for carriers of a telescopic tooth type and a clamping tire type and is also suitable for carriers of a lifting comb tooth type, please refer to fig. 7, the left telescopic leveling mechanism comprises 2 leveling arms 3-1 which are symmetrically arranged in the front and back, the leveling arms 3-1 can be slidably arranged on the lifting frame 1, and the driving mechanism can simultaneously drive the 2 leveling arms 3-1 to extend or retract. Specifically, 2 sliding blocks 3-9 are connected to the leveling arm 3-1, the sliding blocks 3-9 can slide along a guide shaft 3-8, and two ends of the guide shaft 3-8 are connected to the lifting frame 1 through 1 guide shaft seat 3-10 respectively. The right telescopic leveling mechanism and the left telescopic leveling mechanism have the same structure and are not repeated.
The driving mechanism comprises a rack shaft 3-2, a rack guide seat 3-3, a transition gear 3-4, a driving gear 3-5, a second transmission shaft 3-6, a flat layer speed reducing motor 3-7 and a bearing seat 3-11,
the flat layer gear motor 3-7 is connected to the lifting frame 1 through the motor mounting plate 1-3, the output shaft is a double-shaft extension, and two ends of the double-shaft extension are respectively connected with one end of a second transmission shaft 3-6; the rack guide seat 3-3 is connected to the lifting frame 1 and is provided with a guide sleeve; one end of the rack shaft 3-2 is connected with the inner end of the flat layer arm 3-1 and can slide along the inner hole of the guide sleeve; the bearing seats 3-11 are connected to the lifting frame 1, one end of the second transmission shaft 3-6 is connected with an output shaft of the flat-bed gear motor 3-7, the other end of the second transmission shaft is rotatably connected to the bearing seats 3-11, and the end part of the second transmission shaft is connected with the driving gear 3-5; the transition gear 3-4 is meshed with the driving gear 3-5 and the rack shaft 3-2, the transition gear 3-4 is rotatably connected to one end of the gear shaft, and the other end of the gear shaft is fixedly connected to the lifting frame 1; in the embodiment, the bearing seats 3-11 adopt spherical outside surface ball bearings with square seat jackscrews.
In this embodiment, the output end of the flat-layer gear motor 3-7 may also be a hollow output shaft and have a structure of a key groove, the second transmission shaft 3-6 matched with the output end may be a solid shaft with a flat key, the second transmission shaft 3-6 is connected with the hollow output shaft of the flat-layer gear motor 3-7 through a key and is radially fixed, and the spherical outside surface ball bearing with the square base jackscrew is provided with a jackscrew, and can axially fix the second transmission shaft 3-6.
Referring to fig. 9 and 10, the leveling reduction motor 3-7 rotates to drive the second transmission shaft 3-6 to rotate, the driving gear 3-2 at the end of the second transmission shaft 3-6 drives the transition gear 3-4 to rotate, and the transition gear 3-4 drives the leveling arm 3-1 to extend or retract through the rack shaft 3-2;
when the telescopic leveling mechanism 3 does not work, the leveling arm 3-1 is in a retraction state;
when the telescopic leveling mechanism 3 works, the leveling arm 3-1 gradually extends out, the lifting device 6 drives the lifting frame 1 to descend, the outer end of the leveling arm 3-1 is overlapped on a cross beam of a steel structure of the three-dimensional parking equipment, the lifting frame 1 is separated from the chassis 2, and a carrier track on the lifting frame 1 and a parking space guide rail/entrance platform guide rail are positioned on the same plane, so that the leveling function is realized.
The lifting gear motor 6-5 and the leveling gear motor 3-7 are connected with a control system.
The operation of this embodiment is described below with reference to the accompanying drawings:
fig. 9 and 10 are schematic diagrams of vehicle parking and taking, parking spaces are arranged on both sides of a roadway, and the working process of vehicle parking in the embodiment is described below by taking a vehicle stored in a left parking space as an example.
When the transverse trolley 9 does not store or take vehicles, the telescopic leveling mechanism 3 is in a non-working state, and the leveling arm 3-1 is in a retraction state, so that the normal operation of the transverse trolley 9 in the lifting car 11 is not influenced.
The method comprises the following specific steps:
initial state: an output shaft 6-3 of a lifter of the lifting device 6 is at a low position of the stroke, and the lifting frame 1 is at the low position at the moment; the leveling arm 3-1 is in a retraction state;
(1) the transverse moving trolley 9 and the carrier 10 parked above the transverse moving trolley 9 jointly move to the garage entrance of the parked vehicle, the control system controls the lifting speed reducing motor 6-5 to work, the output shaft 6-3 of the lifter rises, the lifting frame 1 is jacked up, and jacking is continued to enable the lower plane of the lifting frame 1 to be higher than the entrance platform;
(2) the control system controls the leveling speed reducing motor 3-7 to work, and the leveling arm 3-1 extends out;
(3) the control system controls a lifting speed reducing motor 6-5 to work, the lifting frame 1 descends along with an output shaft 6-3 of the lifter, and the leveling arm 3-1 is lapped on the inlet platform, so that a carrier track on the lifting frame 1 and a guide rail of the inlet platform are positioned on the same plane, and the leveling function is realized;
(4) the control system starts the carrier 10, carries the vehicles parked on the entrance platform onto the carrier 10, and then returns to the transverse trolley 9 together;
(5) the control system controls the lifting speed reducing motor 6-5 to work, and the lifting frame 1 rises along with the output shaft 6-3 of the lifter;
(6) the control system controls the leveling speed reducing motor 3-7 to work, and the leveling arm 3-1 retracts;
(7) the control system controls the lifting speed reducing motor 6-5 to work, the lifting frame 1 descends along with the output shaft 6-3 of the lifter, and the lifting frame 1 is at a low position;
(8) the main lifting driving system drives a lifting chain, the lifting chain is connected with a lifting point seat 15 on the lifting car 11, the lifting car 11 is driven to move to a target parking layer along a vertical rail 14 arranged on a steel structure, and then the transverse moving trolley 9 carries the carrier 10 and the vehicle to move to a designated left parking space 7 together;
(9) the control system controls a lifting speed reducing motor 6-5 to work, an output shaft 6-3 of the lifter rises, the lifting frame 1 is jacked up, and jacking is continued to enable the lower plane of the lifting frame 1 to be higher than a cross beam of a steel structure of the three-dimensional parking equipment;
(10) the control system controls the leveling speed reducing motor 3-7 to work, and the leveling arm 3-1 extends out;
(11) the control system controls a lifting speed reducing motor 6-5 to work, the lifting frame 1 descends along with an output shaft 6-3 of the lifter, and the leveling arm 3-1 is lapped on a cross beam of a steel structure of the three-dimensional parking equipment, so that a carrier track on the lifting frame 1 and a parking space guide rail are positioned on the same plane, and the leveling function is realized;
(12) the control system starts the carrier 10, and the carrier 10 conveys the vehicle to the left parking space 7 and then returns to the transverse trolley 9;
(13) the control system controls the lifting speed reducing motor 6-5 to work, and the lifting frame 1 rises along with the output shaft 6-3 of the lifter;
(14) the control system controls the leveling speed reducing motor 3-7 to work, and the leveling arm 3-1 retracts;
(15) the control system controls the lifting speed reducing motor 6-5 to work, the lifting frame 1 descends along with the output shaft 6-3 of the lifter, the lifting frame 1 is at a low position, and the initial state is recovered; and finishing the action of storing the vehicle.
Example two:
a method for taking out vehicles by using a transverse moving trolley with a telescopic automatic leveling device is disclosed, and figures 1-8 are schematic diagrams of the transverse moving trolley with the telescopic automatic leveling device for a vertical lifting type mechanical parking device.
The operation of this embodiment is described below with reference to the accompanying drawings:
fig. 9 and 10 are schematic diagrams of a vehicle taken out, parking spaces are arranged on two sides of a roadway, the operation process of taking out the vehicle in the embodiment is described below by taking out the vehicle in the left parking space as an example, when the operation process is performed, the left lifting device and the right lifting device operate simultaneously, and the left telescopic leveling mechanism and the right telescopic leveling mechanism operate simultaneously.
When the transverse trolley 9 does not store or take vehicles, the telescopic leveling mechanism 3 is in a non-working state, and the leveling arm 3-1 is in a retraction state, so that the normal operation of the transverse trolley 9 in the lifting car 11 is not influenced.
The method comprises the following specific steps:
initial state: an output shaft 6-3 of a lifter of the lifting device 6 is at a low position of the stroke, and the lifting frame 1 is at the low position at the moment; the leveling arm 3-1 is in a retraction state;
(1) after the control system issues a vehicle taking-out command, the main lifting driving system drives a lifting chain, the lifting chain is connected with a lifting point seat 15 on the lifting car 11, the lifting car 11 is driven to move to a target parking layer along a vertical track 14 arranged on a steel structure, and the transverse moving trolley 9 carries the carrier 10 to move together to a left parking space 7 for storing vehicles;
(2) the control system controls a lifting speed reducing motor 6-5 to work, an output shaft 6-3 of the lifter rises, the lifting frame 1 is jacked up, and jacking is continued to enable the lower plane of the lifting frame 1 to be higher than a cross beam of a steel structure of the three-dimensional parking equipment;
(3) the control system controls the leveling speed reducing motor 3-7 to work, and the leveling arm 3-1 extends out;
(4) the control system controls a lifting speed reducing motor 6-5 to work, the lifting frame 1 descends along with an output shaft 6-3 of the lifter, and the leveling arm 3-1 is lapped on a cross beam of a steel structure of the three-dimensional parking equipment, so that a carrier track on the lifting frame 1 and a guide rail of a parking space are positioned on the same plane, and the leveling function is realized;
(5) the control system starts the carrier 10, carries the vehicle parked on the left parking space 7 to the carrier 10, and then returns to the transverse trolley 9;
(6) the control system controls the lifting speed reducing motor 6-5 to work, and the lifting frame 1 rises along with the output shaft 6-3 of the lifter;
(7) the control system controls the leveling speed reducing motor 3-7 to work, and the leveling arm 3-1 retracts;
(8) the control system controls the lifting speed reducing motor 6-5 to work, the lifting frame 1 descends along with the output shaft 6-3 of the lifter, and the lifting frame 1 is at a low position;
(9) the main lifting driving system drives a lifting chain, the lifting chain is connected with a lifting point seat 15 on the lifting car 11, the lifting car 11 is driven to move to a parking layer where an exit is located along a vertical rail 14 arranged on a steel structure, and then the trolley 9 carries the carrier 10 and the vehicle to move together to a position corresponding to the exit;
(10) the control system controls a lifting speed reducing motor 6-5 to work, an output shaft 6-3 of the lifter rises, the lifting frame 1 is jacked up, and jacking is continued to enable the lower plane of the lifting frame 1 to be higher than the outlet platform;
(11) the control system controls the leveling speed reducing motor 3-7 to work, and the leveling arm 3-1 extends out;
(12) the control system controls a lifting speed reducing motor 6-5 to work, the lifting frame 1 descends along with an output shaft 6-3 of the lifter, and the leveling arm 3-1 is lapped on the outlet platform, so that a carrier track on the lifting frame 1 and a guide rail of the outlet platform are positioned on the same plane, and the leveling function is realized;
(13) the control system starts the carrier 10, and the carrier 10 returns the vehicle to the transverse trolley 9 after carrying the vehicle to the outlet platform;
(14) the control system controls the lifting speed reducing motor 6-5 to work, and the lifting frame 1 rises along with the output shaft 6-3 of the lifter;
(15) the control system controls the leveling speed reducing motor 3-7 to work, and the leveling arm 3-1 retracts;
(16) the control system controls the lifting speed reducing motor 6-5 to work, the lifting frame 1 descends along with the output shaft 6-3 of the lifter, the lifting frame 1 is at a low position, and the initial state is recovered;
(17) then the garage door is opened automatically, and the driver drives the vehicle out to finish the vehicle taking.
Claims (4)
1. A method for storing a transverse moving trolley into a vehicle with a telescopic automatic leveling device is characterized in that: the method adopts a transverse moving trolley with a telescopic automatic leveling device to store vehicles, and comprises the following specific steps:
(1) the transverse moving trolley moves to the garage entrance for parking the vehicle, the control system controls the lifting device to work, and the lifting frame is jacked up, so that the lower plane of the lifting frame is higher than the entrance platform;
the transverse moving trolley with the telescopic automatic leveling device comprises a chassis, a traveling system arranged on the chassis and a carrier rail, wherein the traveling system drives the transverse moving trolley to move back and forth along a guide rail on a lifting car, the carrier can move left and right along the carrier rail, the transverse moving trolley further comprises a lifting frame, the carrier rail is arranged on the lifting frame, a lifting device is arranged between the lifting frame and the chassis, the lifting device drives the lifting frame to do lifting motion relative to the chassis, a telescopic leveling mechanism is arranged on the lifting frame, and the load of the lifting frame acts on a steel structure frame of mechanical parking equipment when the leveling mechanism works; the telescopic leveling mechanism comprises a leveling arm and a driving mechanism for driving the leveling arm to extend or retract;
the lifting device comprises a left lifting device and a right lifting device, the left lifting device and the right lifting device have the same structure and respectively comprise a positioning block, a lifter and a lifting speed reducing motor, the lifter and the lifting speed reducing motor are fixed on the chassis, an output shaft of the lifting speed reducing motor is a double-shaft extension, two ends of the double-shaft extension are respectively connected with one end of a first transmission shaft, the other end of the first transmission shaft is connected with an input end of the lifter, and the end part of the output shaft of the lifter is connected with a positioning shaft; the upper end of the positioning block is connected with the lifting frame, and the lower end of the positioning block is provided with a positioning groove corresponding to the positioning shaft;
the vertical section of the upper end part of the output shaft of the lifter is in an inverted V shape, the positioning shaft penetrates through the inclined plane of the inverted V shape, and the lower end of the positioning block and the upper end part of the output shaft of the lifter are correspondingly provided with grooves with inverted V-shaped vertical sections;
the telescopic leveling mechanism comprises a left telescopic leveling mechanism and a right telescopic leveling mechanism, the left telescopic leveling mechanism and the right telescopic leveling mechanism have the same structure and respectively comprise a leveling arm and a driving mechanism for driving the leveling arm to extend or retract; the left telescopic leveling mechanism and the right telescopic leveling mechanism are respectively arranged at the left end and the right end of the lifting frame and can independently operate;
when the telescopic leveling mechanism does not work, the leveling arm is in a retraction state;
when the telescopic leveling mechanism works, the leveling arm gradually extends out, the lifting device drives the lifting frame to descend, the outer end of the leveling arm is lapped on a beam of a steel structure of the three-dimensional parking equipment, the lifting frame is separated from the chassis, and a carrier rail on the lifting frame and a parking space guide rail/entrance platform guide rail are positioned on the same plane, so that the leveling function is realized;
(2) the control system controls the driving mechanism to work, and a leveling arm of the leveling mechanism extends out;
(3) the control system controls the lifting device to work, so that the lifting frame descends, the leveling arm is lapped on the inlet platform, and the carrier track on the lifting frame and the inlet platform guide rail are positioned on the same plane, so that the leveling function is realized;
(4) the control system starts the carrier, carries the vehicles parked on the entrance platform onto the carrier, and then returns to the transverse moving trolley together;
(5) the control system controls the lifting device to work so as to lift the lifting frame;
(6) the control system controls the driving mechanism to work, and the leveling arm of the leveling mechanism retracts;
(7) the control system controls the lifting device to work, so that the lifting frame descends and is positioned at a low position;
(8) the main lifting driving system lifts the lifting car to a target parking layer, and the transverse moving trolley carries the carrier and the vehicle to jointly move to a designated parking space;
(9) the control system controls the lifting device to work, and jacks up the lifting frame, so that the lower plane of the lifting frame is higher than the cross beam of the steel structure of the three-dimensional parking equipment;
(10) the control system controls the driving mechanism to work, and a leveling arm of the leveling mechanism extends out;
(11) the control system controls the lifting device to work, so that the lifting frame descends, the leveling arm is lapped on a cross beam of a steel structure of the three-dimensional parking equipment, and a carrier rail on the lifting frame and a parking space guide rail are positioned on the same plane, so that the leveling function is realized;
(12) the control system starts the carrier, and the carrier returns the vehicle to the transverse trolley after carrying the vehicle to the parking space;
(13) the control system controls the lifting device to work so as to lift the lifting frame;
(14) the control system controls the driving mechanism to work, and the leveling arm of the leveling mechanism retracts;
(15) the control system controls the lifting device to work, so that the lifting frame descends, is at a low position and recovers to an initial state.
2. A method for taking out vehicles by a traversing trolley with a telescopic automatic leveling device is characterized in that: the method adopts a transverse moving trolley with a telescopic automatic leveling device to take out vehicles, and comprises the following specific steps:
(1) the main lifting driving system lifts the lifting car to a target parking layer, and the transverse moving trolley carries the carrier to jointly move to a parking space for storing the vehicles;
the transverse moving trolley with the telescopic automatic leveling device comprises a chassis, a traveling system arranged on the chassis and a carrier rail, wherein the traveling system drives the transverse moving trolley to move back and forth along a guide rail on a lifting car, the carrier can move left and right along the carrier rail, the transverse moving trolley further comprises a lifting frame, the carrier rail is arranged on the lifting frame, a lifting device is arranged between the lifting frame and the chassis, the lifting device drives the lifting frame to do lifting motion relative to the chassis, a telescopic leveling mechanism is arranged on the lifting frame, and the load of the lifting frame acts on a steel structure frame of mechanical parking equipment when the leveling mechanism works; the telescopic leveling mechanism comprises a leveling arm and a driving mechanism for driving the leveling arm to extend or retract;
the lifting device comprises a left lifting device and a right lifting device, the left lifting device and the right lifting device have the same structure and respectively comprise a positioning block, a lifter and a lifting speed reducing motor, the lifter and the lifting speed reducing motor are fixed on the chassis, an output shaft of the lifting speed reducing motor is a double-shaft extension, two ends of the double-shaft extension are respectively connected with one end of a first transmission shaft, the other end of the first transmission shaft is connected with an input end of the lifter, and the end part of the output shaft of the lifter is connected with a positioning shaft; the upper end of the positioning block is connected with the lifting frame, and the lower end of the positioning block is provided with a positioning groove corresponding to the positioning shaft;
the vertical section of the upper end part of the output shaft of the lifter is in an inverted V shape, the positioning shaft penetrates through the inclined plane of the inverted V shape, and the lower end of the positioning block and the upper end part of the output shaft of the lifter are correspondingly provided with grooves with inverted V-shaped vertical sections;
the telescopic leveling mechanism comprises a left telescopic leveling mechanism and a right telescopic leveling mechanism, the left telescopic leveling mechanism and the right telescopic leveling mechanism have the same structure and respectively comprise a leveling arm and a driving mechanism for driving the leveling arm to extend or retract; the left telescopic leveling mechanism and the right telescopic leveling mechanism are respectively arranged at the left end and the right end of the lifting frame and can independently operate;
when the telescopic leveling mechanism does not work, the leveling arm is in a retraction state;
when the telescopic leveling mechanism works, the leveling arm gradually extends out, the lifting device drives the lifting frame to descend, the outer end of the leveling arm is lapped on a beam of a steel structure of the three-dimensional parking equipment, the lifting frame is separated from the chassis, and a carrier rail on the lifting frame and a parking space guide rail/entrance platform guide rail are positioned on the same plane, so that the leveling function is realized;
(2) the control system controls the lifting device to work, and jacks up the lifting frame, so that the lower plane of the lifting frame is higher than the cross beam of the steel structure of the three-dimensional parking equipment;
(3) the control system controls the driving mechanism to work, and a leveling arm of the leveling mechanism extends out;
(4) the control system controls the lifting device to work, so that the lifting frame descends, the leveling arm is lapped on a cross beam of a steel structure of the three-dimensional parking equipment, and a carrier rail on the lifting frame and a parking space guide rail are positioned on the same plane, so that the leveling function is realized;
(5) the control system starts the carrier, carries the vehicles parked on the parking spaces to the carrier, and then returns to the transverse trolley together;
(6) the control system controls the lifting device to work so as to lift the lifting frame;
(7) the control system controls the driving mechanism to work, and the leveling arm of the leveling mechanism retracts;
(8) the control system controls the lifting device to work, so that the lifting frame descends and is positioned at a low position;
(9) the main lifting driving system moves the lifting car to a parking layer where the exit is located, and the transverse moving trolley carries the carrier and the vehicle to move together to a position corresponding to the exit;
(10) the control system controls the lifting device to work, and jacks up the lifting frame, so that the lower plane of the lifting frame is higher than the outlet platform;
(11) the control system controls the driving mechanism to work, and a leveling arm of the leveling mechanism extends out;
(12) the control system controls the lifting device to work, so that the lifting frame descends, the leveling arm is lapped on the outlet platform, and the carrier track on the lifting frame and the outlet platform guide rail are positioned on the same plane, so that the leveling function is realized;
(13) the control system starts the carrier, and the carrier conveys the vehicle to the outlet platform and then returns to the transverse moving trolley;
(14) the control system controls the lifting device to work so as to lift the lifting frame;
(15) the control system controls the driving mechanism to work, and the leveling arm of the leveling mechanism retracts;
(16) the control system controls the lifting device to work, so that the lifting frame descends, is at a low position and recovers to an initial state;
(17) the garage door opens automatically and the driver drives the car out of the exit.
3. A method of accessing vehicles by a traverse trolley having a telescopic auto-leveling device according to claim 1 or 2, characterized in that: each telescopic leveling mechanism all include 2 leveling arms that the front and back symmetry set up, leveling arm slidable ground sets up on the crane, actuating mechanism can drive 2 leveling arms simultaneously and stretch out or retract.
4. A method of accessing a vehicle using a traverse carriage having a telescopic auto-leveling device as claimed in claim 3, wherein: the leveling arm is connected with a slide block which can slide along a guide shaft, two ends of the guide shaft are connected with the lifting frame through a guide shaft seat, the driving mechanism comprises,
a flat layer gear motor connected to the lifting frame, an output shaft of the flat layer gear motor is a double-shaft extension, two ends of the double-shaft extension are respectively connected with one end of a second transmission shaft,
a rack guide seat connected to the lifting frame and provided with a guide sleeve,
one end of the rack shaft is connected with the inner end of the flat layer arm and can slide along the inner hole of the guide sleeve,
a bearing seat connected with the lifting frame,
one end of the second transmission shaft is connected with an output shaft of the flat-layer speed reduction motor, the other end of the second transmission shaft is rotatably connected on the bearing seat and the end part of the second transmission shaft is connected with a driving gear,
the transition gear is meshed with the driving gear and the rack shaft and is rotatably connected to one end of the gear shaft, and the other end of the gear shaft is fixedly connected to the lifting frame;
the leveling gear motor rotates to drive the second transmission shaft to rotate, the driving gear at the end part of the second transmission shaft drives the transition gear to rotate, and the transition gear drives the leveling arm to extend or retract through the rack shaft.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010970163.8A CN112081439B (en) | 2020-09-16 | 2020-09-16 | Method for storing and taking vehicles by using transverse moving trolley with telescopic automatic leveling device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010970163.8A CN112081439B (en) | 2020-09-16 | 2020-09-16 | Method for storing and taking vehicles by using transverse moving trolley with telescopic automatic leveling device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112081439A CN112081439A (en) | 2020-12-15 |
| CN112081439B true CN112081439B (en) | 2022-03-04 |
Family
ID=73738150
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010970163.8A Active CN112081439B (en) | 2020-09-16 | 2020-09-16 | Method for storing and taking vehicles by using transverse moving trolley with telescopic automatic leveling device |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112081439B (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112727207B (en) * | 2021-01-30 | 2022-09-09 | 武汉智象机器人有限公司 | Single-motor gear-driven external clamping type carrier for large pneumatic tires and using method |
| CN113027200B (en) * | 2021-03-18 | 2022-10-25 | 山东天辰智能停车有限公司 | Method for accurately positioning walking of clamp carrier with encoder and verification switch |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE1434831A1 (en) * | 1964-04-03 | 1969-03-27 | Schuechtermann & Kremer Baum A | Device for parking garages |
| JP4544441B2 (en) * | 2000-03-27 | 2010-09-15 | Ihi運搬機械株式会社 | Parallel elevator type parking system |
| CN206053478U (en) * | 2016-08-23 | 2017-03-29 | 广东明和智能设备有限公司 | A kind of push rod flat bed mechanism |
| CN207436611U (en) * | 2017-10-20 | 2018-06-01 | 四川志泰立体车库有限公司 | A kind of intelligent machine Garage lifting flat bed positioning safety device |
| CN207905426U (en) * | 2017-12-29 | 2018-09-25 | 广东明和智能设备有限公司 | A kind of stereo garage Transport Vehicle flat bed detent mechanism |
| CN110485780B (en) * | 2019-09-03 | 2024-03-26 | 山东天辰智能停车有限公司 | Transverse moving trolley with swing arm type automatic leveling device for car type mechanical parking equipment |
| CN110616934A (en) * | 2019-10-15 | 2019-12-27 | 山东天辰智能停车有限公司 | Entrance and exit device with 180-degree rotary disc device for modular parking equipment |
-
2020
- 2020-09-16 CN CN202010970163.8A patent/CN112081439B/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN112081439A (en) | 2020-12-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112282462B (en) | Method for storing and taking vehicles by using transverse trolley with leveling device and rotation function | |
| CN211543559U (en) | Wheel changing system | |
| CN112081439B (en) | Method for storing and taking vehicles by using transverse moving trolley with telescopic automatic leveling device | |
| CN102162310A (en) | Mobile lifting avoidance-free upper parking deck | |
| CN109057446B (en) | Rolling type car carrying plate storage device for three-dimensional parking lot and three-dimensional parking lot | |
| CN104234487A (en) | Cylindrical multi-layer parking device with a rotary guide rail support | |
| CN112081438B (en) | Transverse moving trolley with telescopic automatic leveling device for vertical lifting mechanical parking equipment | |
| CN107965186B (en) | Comb-tooth type three-dimensional parking equipment | |
| CN112282461B (en) | Sideslip platform truck with telescopic automatic leveling device and gyration function | |
| CN210714016U (en) | Transverse moving trolley with swing arm type automatic leveling device for car mechanical parking equipment | |
| CN116040477B (en) | Crane for automatic oxidation workshop | |
| CN110541591B (en) | Cross car-entering lifting device with lifting turntable | |
| CN112227789A (en) | Vertical lifting type intelligent stereo garage | |
| CN116788984A (en) | Rail mounted container portal crane | |
| CN204081604U (en) | A kind of rail brackets rotational circle tubular Multilayer parking equipment | |
| CN112478559B (en) | Primary and secondary car | |
| CN212450345U (en) | Railway vehicle wheel pair matching lifting manipulator | |
| CN210393483U (en) | Longitudinal climbing device for super-huge steel structure | |
| CN211776256U (en) | Suspension type lifting beam type three-dimensional transfer platform | |
| CN210973486U (en) | Positioning device for lifting equipment of AGV (automatic guided vehicle) | |
| CN109537956B (en) | Multi-layer parking equipment with lifting and transverse moving mechanism | |
| CN108999444B (en) | A upper mechanical parking equipment for community | |
| CN207377224U (en) | A kind of comb-tooth-type automobile transverse direction intelligent carrier | |
| CN202023390U (en) | Mobile lifting type avoidance-free upper layer parking platform | |
| CN109057445B (en) | Roller type car carrying plate storage device for three-dimensional parking lot and three-dimensional parking lot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |