CN111975682A - 一种工业机器人复合夹具 - Google Patents
一种工业机器人复合夹具 Download PDFInfo
- Publication number
- CN111975682A CN111975682A CN202010892137.8A CN202010892137A CN111975682A CN 111975682 A CN111975682 A CN 111975682A CN 202010892137 A CN202010892137 A CN 202010892137A CN 111975682 A CN111975682 A CN 111975682A
- Authority
- CN
- China
- Prior art keywords
- lead screw
- clamping plates
- base
- slider
- workpiece
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B11/00—Work holders not covered by any preceding group in the subclass, e.g. magnetic work holders, vacuum work holders
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
本发明涉及一种工业机器人复合夹具,包括底座和滑块,底座上设置有两根平行的滑杆和一根丝杠,电机的输出轴与丝杠左端固定连接,滑块滑动套接在滑杆上,滑块与丝杠对应部位螺纹配合连接,两个滑块相对一侧均设置有夹板,滑块与夹板之间设有两根弹簧,夹板前后边缘均对应设置拉绳,拉绳的端部与夹板固定连接,拉绳缠绕在导轮上,导轮上下两侧的转轴均与滑块转动连接,转轴上固定有限位板;在对工件进行测量时,利用电机驱动丝杠转动,利用夹板将工件左右两侧夹紧的同时,夹板压缩弹簧,夹板通过拉绳带动导轮转动,限位板随着导轮转动,在利用夹板将工件夹紧的同时,限位板将工件前后两侧夹紧,可避免工件向前后两侧倾斜。
Description
技术领域
本发明属于工业设备技术领域,具体涉及一种工业机器人复合夹具。
背景技术
工业机器人被广泛应用在各种工厂之中,在对工业机器人的工件加工过程中,需要用精度很高的复合夹具,传统的复合夹具在将工件夹持之后,特别是方形工件,为了方便放置,夹具一般设置成夹持工件的左右两侧,在将部件左右两侧夹持的过程中,工件容易向先后两侧倾斜, 而直接夹持工件四侧会导致夹具过于复杂,占用空间过大,不利于将工件放置到夹具内,因此针对现有的技术不足,需要进行进一步的改进。
发明内容
有鉴于此,本发明的目的在于提供一种工业机器人复合夹具,以解决上述问题。
为实现上述目的,本发明所采用的技术方案是:一种工业机器人复合夹具,包括上侧中部凸起的底座、分布在中部凸起两侧的滑块,底座上设置有两根平行的滑杆和一根丝杠,其中丝杠位于滑杆之间,且滑杆和丝杠两端分别与底座对应边缘转动连接,底座左侧固定有电机,电机的输出轴与丝杠左端固定连接,滑杆和丝杠均穿过底座中部凸起部位,滑块滑动套接在滑杆上,且滑块与丝杠对应部位螺纹配合连接,两个滑块相对一侧均设置有夹板,夹板在滑块滑动,滑块与夹板之间设有两根弹簧,弹簧一端与滑块固定连接,弹簧另一端与夹板固定连接,夹板前后边缘均对应设置拉绳,拉绳的端部与夹板固定连接,拉绳缠绕在导轮上,导轮的转轴与滑块转动连接,转轴上固定有限位板。
优选的,所述丝杠左部和右部螺纹选向相反。
优选的,所述限位板背离转轴一侧设有圆柱体,方便夹持工件。
本发明的有益效果是:在对工件进行测量时,利用电机驱动丝杠转动,带动滑块在滑杆上滑动,使两个滑块相互靠近,夹板靠近工件,利用夹板将工件左右两侧夹紧的同时,夹板压缩弹簧,夹板通过拉绳带动导轮转动,限位板随着导轮转动,限位板的圆柱体将工件前后两侧夹紧;在利用夹板将工件夹紧的同时,限位板将工件前后两侧夹紧,可避免工件向前后两侧倾斜。
附图说明
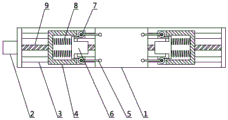
图1是本发明正视结构图;
图2为本发明俯视结构图一;
图3为本发明俯视结构图二。
图中标号:1底座;2电机;3滑杆;4滑块;5限位板;6夹板;7导轮;8弹簧;9丝杆;10工件。
具体实施方式
下面结合附图及具体实施方式对本发明作进一步详细描述:
如图1-3,一种工业机器人复合夹具,包括上侧中部凸起的底座1、分布在中部凸起两侧的滑块4,底座1上设置有两根平行的滑杆3和一根丝杠9,其中丝杠9位于两根滑杆3之间,且滑杆3和丝杠9两端分别与底座1对应边缘转动连接,底座1左侧固定有电机2,电机2的输出轴与丝杠9左端固定连接,丝杠9左部和右部螺纹选向相反,滑杆3和丝杠9均穿过底座1中部凸起部位,滑块4滑动套接在滑杆3上,且滑块4与丝杠9对应部位螺纹配合连接,两个滑块4相对一侧均设置有夹板6,夹板6在滑块4滑动,滑块4与夹板6之间设有两根弹簧8,弹簧8一端与滑块4固定连接,弹簧8另一端与夹板6固定连接,夹板6前后边缘均对应设置拉绳,拉绳的端部与夹板6固定连接,拉绳缠绕在导轮7上,导轮7转轴的上下两侧均与滑块4转动连接,转轴上固定有限位板5,限位板5背离转轴一侧设有圆柱体,方便夹持工件10。
本发明的工作原理:在对工件进行测量时,将工件10放置到底座1中部凸起部位,开启电机2驱动丝杠9转动,带动滑块4在滑杆3上滑动,使两个滑块4相互靠近,夹板6靠近工件10,夹板6压缩弹簧8,夹板6通过拉绳带动导轮7转动,限位板5随着导轮7转动,限位板5的圆柱体将工件10前后两侧夹紧。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
Claims (3)
1.一种工业机器人复合夹具,包括上侧中部凸起的底座、分布在中部凸起两侧的滑块,其特征在于:所述底座上设置有两根平行的滑杆和一根丝杠,其中丝杠位于滑杆之间,滑杆和丝杠两端分别与底座对应边缘转动连接,底座左侧固定有电机,电机的输出轴与丝杠左端固定连接,滑杆和丝杠均穿过底座中部凸起部位,滑块滑动套接在滑杆上,且滑块与丝杠对应部位螺纹配合连接,两个滑块相对一侧均设置有夹板,夹板在滑块滑动,滑块与夹板之间设有两根弹簧,弹簧一端与滑块固定连接,弹簧另一端与夹板固定连接,夹板前后边缘均对应设置拉绳,拉绳的端部与夹板固定连接,拉绳缠绕在导轮上,导轮的转轴与滑块转动连接,转轴上固定有限位板。
2.根据权利要求1所述的一种工业机器人复合夹具,其特征在于,所述丝杠左部和右部螺纹选向相反。
3.根据权利要求1所述的一种工业机器人复合夹具,其特征在于,所述限位板背离转轴一侧设有圆柱体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010892137.8A CN111975682B (zh) | 2020-08-31 | 2020-08-31 | 一种工业机器人复合夹具 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010892137.8A CN111975682B (zh) | 2020-08-31 | 2020-08-31 | 一种工业机器人复合夹具 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111975682A true CN111975682A (zh) | 2020-11-24 |
| CN111975682B CN111975682B (zh) | 2022-03-18 |
Family
ID=73441104
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010892137.8A Active CN111975682B (zh) | 2020-08-31 | 2020-08-31 | 一种工业机器人复合夹具 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111975682B (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113601114A (zh) * | 2021-08-06 | 2021-11-05 | 陕西斯瑞新材料股份有限公司 | 一种大功率发电机集电环加工工艺 |
| CN113714855A (zh) * | 2021-09-01 | 2021-11-30 | 武汉纽联精工科技有限公司 | 一种立式加工中心可靠性快速检测装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU1743775A1 (ru) * | 1989-09-27 | 1992-06-30 | Омское научно-производственное объединение "Прогресс" | Устройство дл ориентации и зажима |
| JP2008023695A (ja) * | 2006-07-18 | 2008-02-07 | Pubot Giken:Kk | クランプ装置 |
| CN109079676A (zh) * | 2018-08-21 | 2018-12-25 | 芜湖职业技术学院 | 可快速拆卸汽车玻璃的夹紧装置 |
| CN209682217U (zh) * | 2019-03-22 | 2019-11-26 | 天津立德尔智能装备科技有限公司 | 一种工业加工用机器人夹具 |
| CN210307498U (zh) * | 2019-08-01 | 2020-04-14 | 南通市肿瘤医院 | 一种高效液相色谱分析用色谱柱夹持架 |
| CN210499282U (zh) * | 2019-06-26 | 2020-05-12 | 台州中茂机械有限公司 | 一种便于更换夹具的数控机床 |
| CN210588253U (zh) * | 2019-09-19 | 2020-05-22 | 昆山炫鹏机械设备制造有限公司 | 一种机械设备生产夹紧装置 |
-
2020
- 2020-08-31 CN CN202010892137.8A patent/CN111975682B/zh active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU1743775A1 (ru) * | 1989-09-27 | 1992-06-30 | Омское научно-производственное объединение "Прогресс" | Устройство дл ориентации и зажима |
| JP2008023695A (ja) * | 2006-07-18 | 2008-02-07 | Pubot Giken:Kk | クランプ装置 |
| CN109079676A (zh) * | 2018-08-21 | 2018-12-25 | 芜湖职业技术学院 | 可快速拆卸汽车玻璃的夹紧装置 |
| CN209682217U (zh) * | 2019-03-22 | 2019-11-26 | 天津立德尔智能装备科技有限公司 | 一种工业加工用机器人夹具 |
| CN210499282U (zh) * | 2019-06-26 | 2020-05-12 | 台州中茂机械有限公司 | 一种便于更换夹具的数控机床 |
| CN210307498U (zh) * | 2019-08-01 | 2020-04-14 | 南通市肿瘤医院 | 一种高效液相色谱分析用色谱柱夹持架 |
| CN210588253U (zh) * | 2019-09-19 | 2020-05-22 | 昆山炫鹏机械设备制造有限公司 | 一种机械设备生产夹紧装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113601114A (zh) * | 2021-08-06 | 2021-11-05 | 陕西斯瑞新材料股份有限公司 | 一种大功率发电机集电环加工工艺 |
| CN113714855A (zh) * | 2021-09-01 | 2021-11-30 | 武汉纽联精工科技有限公司 | 一种立式加工中心可靠性快速检测装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111975682B (zh) | 2022-03-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111975682B (zh) | 一种工业机器人复合夹具 | |
| CN212858581U (zh) | 一种机械加工用可多角度固定的机械夹具 | |
| CN212885159U (zh) | 一种球体加工夹具 | |
| CN211387782U (zh) | 一种非标准件加工用柔性夹紧装置 | |
| CN209648148U (zh) | 一种缸体加工固定装置 | |
| CN219465440U (zh) | 一种易于装夹的定位治具 | |
| CN208068092U (zh) | 一种楔形块钻孔打磨夹持装置 | |
| CN209190329U (zh) | 一种重切削型高速硬轨加工定位装置 | |
| CN218110521U (zh) | 一种具有角度调节功能的汽车零部件生产用夹具 | |
| CN217071862U (zh) | 一种木工雕刻用打磨装置 | |
| CN215036711U (zh) | 一种新型汽车轮边减速器壳体夹具 | |
| CN109079511A (zh) | 一种机械加工用往复铣磨装置 | |
| CN213969151U (zh) | 一种数控钻床设备用双夹具装置 | |
| CN211759890U (zh) | 一种用于机械加工的圆杆固定夹紧装置 | |
| CN221792272U (zh) | 一种工业机器人打磨用夹手 | |
| CN205888159U (zh) | 一种台钻 | |
| CN221735671U (zh) | 一种铝型材加工用毛刺打磨装置 | |
| CN215470330U (zh) | 一种基于plc控制的金属制品切割设备 | |
| CN220262031U (zh) | 一种3d打印用夹具 | |
| CN219212679U (zh) | 一种双磨头磨床 | |
| CN220880633U (zh) | 一种五金加工用打孔装置 | |
| CN108237492A (zh) | 一种楔形块钻孔打磨夹持装置 | |
| CN221159792U (zh) | 一种钛板剪切边缘的处理装置 | |
| CN210550142U (zh) | 一种新能源汽车用导流板加工打磨装置 | |
| CN219403398U (zh) | 一种龙门式加工中心紧固用夹具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |