CN110657146B - 一种光学透镜耦合机 - Google Patents
一种光学透镜耦合机 Download PDFInfo
- Publication number
- CN110657146B CN110657146B CN201910865234.5A CN201910865234A CN110657146B CN 110657146 B CN110657146 B CN 110657146B CN 201910865234 A CN201910865234 A CN 201910865234A CN 110657146 B CN110657146 B CN 110657146B
- Authority
- CN
- China
- Prior art keywords
- optical lens
- coupling
- material clamping
- driving
- workbench
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000010168 coupling process Methods 0.000 title claims abstract description 158
- 230000008878 coupling Effects 0.000 title claims abstract description 156
- 238000005859 coupling reaction Methods 0.000 title claims abstract description 156
- 230000003287 optical effect Effects 0.000 title claims abstract description 130
- 230000007246 mechanism Effects 0.000 claims abstract description 168
- 239000000463 material Substances 0.000 claims abstract description 123
- 238000006073 displacement reaction Methods 0.000 claims abstract description 28
- 239000003292 glue Substances 0.000 claims abstract description 25
- 238000003848 UV Light-Curing Methods 0.000 claims abstract description 21
- 238000003825 pressing Methods 0.000 claims description 36
- 230000002950 deficient Effects 0.000 claims description 14
- 238000001514 detection method Methods 0.000 claims description 10
- 230000035939 shock Effects 0.000 claims description 7
- 238000003860 storage Methods 0.000 claims description 7
- 239000006096 absorbing agent Substances 0.000 claims description 5
- 238000000034 method Methods 0.000 abstract description 4
- 239000013307 optical fiber Substances 0.000 description 10
- 238000012546 transfer Methods 0.000 description 5
- 238000013461 design Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000012544 monitoring process Methods 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 241001391944 Commicarpus scandens Species 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000004026 adhesive bonding Methods 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000003139 buffering effect Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000001723 curing Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000000016 photochemical curing Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 125000003003 spiro group Chemical group 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images











Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16B—DEVICES FOR FASTENING OR SECURING CONSTRUCTIONAL ELEMENTS OR MACHINE PARTS TOGETHER, e.g. NAILS, BOLTS, CIRCLIPS, CLAMPS, CLIPS OR WEDGES; JOINTS OR JOINTING
- F16B11/00—Connecting constructional elements or machine parts by sticking or pressing them together, e.g. cold pressure welding
- F16B11/006—Connecting constructional elements or machine parts by sticking or pressing them together, e.g. cold pressure welding by gluing
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/025—Mountings, adjusting means, or light-tight connections, for optical elements for lenses using glue
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Mechanical Engineering (AREA)
- Coating Apparatus (AREA)
Abstract
本发明涉及自动化耦合设备技术领域,尤其是指一种光学透镜耦合机,其包括工作台、器件耦合平台、定位机构、透镜上料机构、UV固化装置、夹料机构、点胶机构以及用于驱动夹料机构和点胶机构均能够沿着工作台的X轴、Y轴及Z轴移动的位移驱动机构,器件耦合平台用于承载外界的耦合器件,透镜上料机构用于将外界的待耦合的光学透镜输送至夹料机构的取料位置,夹料机构用于夹取光学透镜,定位机构用于对夹料机构所夹取的光学透镜进行视觉定位。本发明的光学透镜与耦合器件的整个耦合工序均由自动化机构完成,其自动化程度高,运行稳定,由此代替传统的人工操作方式,大大地提高了器件的耦合效率和耦合质量,且降低了劳动成本。
Description
技术领域
本发明涉及自动化耦合设备技术领域,尤其是指一种光学透镜耦合机。
背景技术
在现有光学电子产品的生产中需要进行耦合处理,如图6所展示的耦合器件100,在生产过程中,需要将矩形的光学透镜101放置在耦合器件100上,再调整其耦合位置,耦合完成后,对耦合器件100进行点胶,点胶后将光学透镜101贴合在耦合器件100上,最后通过UV点光源进行固化。但是,现在这几个生产工序均由人工操作,工人通过显微镜观看,再使用夹子将光学透镜101先粘合在耦合器件上,接着进行光学透镜101与耦合器件100的光纤耦合;采用该人工上料的方式,容易出现光学透镜101的位置偏移,造成无法完成光纤耦合,出错率较大,并且上料效率较低,工人劳动强度大,工人容易产生疲劳,且劳动成本高;工人长时间容易产生疲惫,由此会导致人工上料的好坏难以保证,不能保证产品的良品率。该缺陷十分明显,亟需一种有效的解决方案。
发明内容
本发明的目的在于针对现有技术的不足提供一种光学透镜耦合机,其能够实现光学透镜的自动化上料及将光学透镜精准地贴合在耦合器件上,并自动化完成光学透镜与耦合器件的光纤耦合;该光学透镜耦合机自动化程度高,耦合精准度高且耦合效率高。
为了实现上述目的,本发明采用如下技术方案:
本发明提供的一种光学透镜耦合机,其包括工作台、设置于工作台的器件耦合平台、设置于工作台的定位机构、设置于工作台的透镜上料机构、设置于工作台的UV固化装置、活动设置于工作台的夹料机构、活动设置于工作台的点胶机构以及用于驱动夹料机构和点胶机构均能够沿着工作台的X轴、Y轴及Z轴移动的位移驱动机构,所述器件耦合平台用于承载外界的耦合器件,所述透镜上料机构用于将外界的待耦合的光学透镜输送至夹料机构的取料位置,所述夹料机构用于夹取光学透镜,所述定位机构用于对夹料机构所夹取的光学透镜进行视觉定位,所述点胶机构用于对器件耦合平台所承载的耦合器件进行点胶,所述UV固化装置用于对夹料机构所夹持的光学透镜进行UV光固化。
其中的,所述器件耦合平台包括装设于工作台的承载座、设置于承载座的承载治具以及设置于承载座与承载治具之间的平面调节装置,所述平面调节装置用于调整承载治具的平面度。
进一步的,所述承载治具包括承载部和设置于承载部的一侧的压紧部,所述承载部的上表面凹设有用于承载外界的耦合器件的容置固定腔,所述承载部设置有用于对耦合器件的侧面进行压紧固定的第一压紧组件;所述压紧部设置有用于对耦合器件的一端进行压紧的第二压紧组件。
其中的,所述夹料机构包括与位移驱动机构驱动连接的固定座、设置于固定座的夹料装置、用于驱动夹料装置相对固定座升降的升降驱动装置,所述UV固化装置设置于固定座并用于对夹料装置所夹持的光学透镜进行UV光固化。
进一步的,所述夹料装置包括滑动设置于固定座并与升降驱动装置驱动连接的夹料固定块、设置于夹料固定块的中部夹头、滑动设置于夹料固定块并分别位于中部夹头的两侧的左侧夹头和右侧夹头以及用于驱动左侧夹头和右侧夹头同步靠近或者远离中部夹头的夹头移动驱动装置;所述左侧夹头的夹料端和右侧夹头的夹料端均突伸出中部夹头的底端,所述左侧夹头与右侧夹头所突出中部夹头的部分与中部夹头的底端围设成用于容设外界的光学透镜的夹料腔。
其中的,所述透镜上料机构包括设置于工作台并位于器件耦合平台的一侧的上料基座、滑动设置于上料基座的上料治具以及用于驱动上料治具靠近或者远离器件耦合平台的上料移动驱动装置,所述上料治具靠近器件耦合平台的一端设置有储料盘和不良品料盘。
其中的,所述定位机构包括设置于工作台并位于器件耦合平台的一侧的三个定位相机,三个所述定位相机相互垂直设置于工作台。
其中的,所述点胶机构包括设置于夹料机构的一侧并与位移驱动机构驱动连接的点胶固定座、滑动设置于点胶固定座的点胶器以及装设于点胶固定座并用于驱动点胶器升降的点胶升降驱动器。
其中的,所述工作台的底部设置有多个减震器。
其中的,所述夹料机构的一侧设置有与位移驱动机构驱动连接的高度检测装置,所述高度检测装置用于检测夹料机构所夹持的光学透镜与器件耦合平台所承载的耦合器件之间的高度。
本发明的有益效果:
本发明提供的一种光学透镜耦合机,位移驱动机构驱动夹料机构和点胶机构在工作台的X轴、Y轴和Z轴的方向上任意移动,透镜上料机构将外界的待耦合光学透镜移送至器件耦合平台的一侧,夹料机构移动至透镜上料机构并夹取透镜上料机构上的光学透镜,接着夹料机构夹持光学透镜移动至定位机构,定位机构对夹料机构所夹持的光学透镜进行视觉定位;光学透镜完成定位后,夹料机构夹持光学透镜移动至器件耦合平台并将光学透镜放置在器件耦合平台所承载的耦合器件进行光纤耦合;光学透镜完成耦合后,假设该光学透镜耦合失败则为不良品,此时夹料机构便将该不良品移走,再重新夹取新的光学透镜重新进行上述步骤;假设该光学透镜耦合成功后,此时夹料机构夹取光学透镜并移动离开耦合器件,然后点胶机构移动至耦合器件并对光学透镜所放置的位置进行点胶,点胶完成后,点胶机构离开耦合器件,夹料机构移动回耦合器件并将光学透镜贴合在耦合器件被点胶的位置,然后,UV固化装置便对光学透镜进行UV固化。本发明的光学透镜与耦合器件的整个耦合工序均由自动化机构完成,其自动化程度高,运行稳定,由此代替传统的人工操作方式,大大地提高了器件的耦合效率和耦合质量,且降低了劳动成本。
附图说明
图1为本发明的立体结构示意图;
图2为本发明的位移驱动机构的结构示意图;
图3为本发明的夹料机构的结构示意图;
图4为本发明的夹料机构的局部结构示意图;
图5为本发明的夹料机构的分解结构示意图;
图6为本发明的夹料装置的分解结构示意图;
图7为本发明的定位机构的结构示意图;
图8为本发明的点胶机构的结构示意图;
图9为本发明的透镜上料机构的结构示意图;
图10为本发明的上料治具的分解结构示意图;
图11为本发明的器件耦合平台的结构示意图;
图12为本发明的承载治具的结构示意图;
图13为本发明的承载治具的分解结构示意图。
具体实施方式
为了便于本领域技术人员的理解,下面结合实施例与附图对本发明作进一步的说明,实施方式提及的内容并非对本发明的限定。以下结合附图对本发明进行详细的描述。
如图1至图13所示,本发明提供的一种光学透镜耦合机,其包括工作台7、设置于工作台7的器件耦合平台2、设置于工作台7的定位机构3、设置于工作台7的透镜上料机构4、设置于工作台7的UV固化装置15、活动设置于工作台7的夹料机构1、活动设置于工作台7的点胶机构5以及用于驱动夹料机构1和点胶机构5均能够沿着工作台7的X轴、Y轴及Z轴移动的位移驱动机构6,所述器件耦合平台2用于承载外界的耦合器件,所述透镜上料机构4用于将外界的待耦合的光学透镜输送至夹料机构1的取料位置,所述夹料机构1用于夹取光学透镜,所述定位机构3用于对夹料机构1所夹取的光学透镜进行视觉定位,所述点胶机构5用于对器件耦合平台2所承载的耦合器件进行点胶,所述UV固化装置15用于对夹料机构1所夹持的光学透镜进行UV光固化。
在实际应用中,位移驱动机构6驱动夹料机构1和点胶机构5在工作台7的X轴、Y轴和Z轴的方向上任意移动,透镜上料机构4将外界的待耦合的光学透镜移送至器件耦合平台2的一侧,夹料机构1移动至透镜上料机构4并夹取透镜上料机构4上的光学透镜,接着夹料机构1夹持光学透镜移动至定位机构3,定位机构3对夹料机构1所夹持的光学透镜进行视觉定位;光学透镜完成定位后,夹料机构1夹持光学透镜移动至器件耦合平台2并将光学透镜放置在器件耦合平台2所承载的耦合器件上进行光纤耦合;光学透镜完成耦合后,假设该光学透镜耦合失败则为不良品,此时夹料机构1便将该不良品移走,再重新夹取新的光学透镜重新进行上述步骤;假设该光学透镜耦合成功后,此时夹料机构1夹取光学透镜并移动离开耦合器件,然后点胶机构5移动至耦合器件并对光学透镜所放置的位置进行点胶,点胶完成后,点胶机构5离开耦合器件,夹料机构1夹持光学透镜移动回耦合器件的上方并将光学透镜贴合在耦合器件被点胶的位置,然后,UV固化装置15便对光学透镜与耦合器件之间的胶水进行UV固化。本发明的光学透镜与耦合器件的整个耦合工序均由自动化机构完成,其自动化程度高,运行稳定,由此代替传统的人工操作方式,大大地提高了光学透镜与耦合器件的耦合效率和耦合质量,且降低了劳动成本。
作为优选的,所述位移驱动机构6包括设置于工作台7的支座、设置于支座上的X轴直线驱动装置61、Y轴直线驱动装置62及Z轴直线驱动装置63,Y轴直线驱动装置62与X轴直线驱动装置61驱动连接,Z轴直线驱动装置63与Y轴直线驱动装置62驱动连接,夹料机构1和点胶机构5均与Z轴直线驱动装置63驱动连接。如图2所示,所述X轴直线驱动装置61、Y轴直线驱动装置62及Z轴直线驱动装置63均为直线电机、滑轨与滑块配合的驱动机构;具体地,所述位移驱动机构6还包括设置于Z轴直线驱动装置63的Z轴驱动气缸64,所述Z轴驱动气缸64的活塞轴与Z轴直线驱动装置63的Z轴滑动块65驱动连接,夹料机构1连接于Z轴滑动块65。在实际应用中,Z轴直线驱动装置63驱动夹料机构1升降,以使夹料机构1能够将光学透镜放置在耦合器件上,Z轴直线驱动装置63由于直线电机的驱动还是会存在一定的冲击惯性,而光学透镜较为脆弱,光学透镜在放置时容易被压破,因此,采用Z轴驱动气缸64与Z轴直线驱动装置63的Z轴滑动块65驱动连接,用以给予滑块一个气压缓冲力,以使得Z轴滑动块65的移动更为平稳,减少直线电机所带来的冲击力,以确保夹料机构1的升降不会对光学透镜带来过大的冲击。
在本技术方案中,所述定位机构3包括设置于工作台7并位于器件耦合平台2的一侧的三个定位相机31,三个所述定位相机31相互垂直设置于工作台7。具体地,三个定位相机31分别沿着工作台7的X轴、Y轴和Z轴平行设置,三个定位相机31的镜头均对焦于一个点。在实际应用中,当夹料机构1从透镜上料机构4中夹取光学透镜后,夹料机构1将光学透镜移送至三个定位相机31的镜头所对焦的位置,接着三个定位相机31对光学透镜的位置进行视觉定位。采用视觉定位,可以对光学透镜的位置进行精确地定位,进而使得夹料机构1能够更加精度地将光学透镜放置在耦合器件上,从而提高光学透镜的耦合精确度。
在本技术方案中,所述点胶机构5包括设置于夹料机构1的一侧并与位移驱动机构6驱动连接的点胶固定座52、滑动设置于点胶固定座52的点胶器53以及装设于点胶固定座52并用于驱动点胶器53升降的点胶升降驱动器51。具体地,点胶升降驱动器51为驱动气缸,点胶器52经由滑块与点胶固定座52滑动连接。在实际应用中,当光学透镜在耦合器件上完成光纤耦合后,夹料机构1将光学透镜从耦合器件上暂时取走,接着位移驱动机构6驱动夹料机构1离开耦合器件,同时,位移驱动机构6驱动点胶固定座52连带点胶器53移动至耦合器件所承载光学透镜的位置的上方,点胶升降驱动器51驱动点胶器53下降,进而带动点胶器53对耦合器件进行点胶;点胶完成后,位移驱动机构6驱动点胶固定座52连带点胶器53离开耦合器件,同时,位移驱动机构6驱动夹料机构1移动至耦合器件,此时夹料机构1将光学透镜贴合在耦合器件所点胶的位置上;最后,UV固化装置15对夹料机构1所夹持的光学透镜进行UV固化。
在本技术方案中,所述工作台7的底部设置有多个减震器71。具体地,多个减震器71均为气囊减震器71,采用气囊减震器71可以有效为吸收工作台7的震动,防止其震动而影响光学透镜与耦合器件的光纤耦合的准确性,以保证光纤耦合的精确度。
在本技术方案中,所述夹料机构1的一侧设置有与位移驱动机构6驱动连接的高度检测装置72,所述高度检测装置72用于检测夹料机构1所夹持的光学透镜与器件耦合平台2所承载的耦合器件之间的高度。具体地,所述高度检测装置72为激光传感器。在实际应用中,在夹料机构1将光学透镜放置在器件耦合平台2之前,位移驱动机构6驱动高度检测装置72移动至耦合器件的上方,高度检测装置72便检测其与耦合器件之间的高度,检测后便将信息反馈至位移驱动机构6,从而使位移驱动机构6驱动夹料机构1下降相对应的高度,用以对夹料机构1进行精确控制,防止夹料机构1的下降过度而使光学透镜受到破坏。
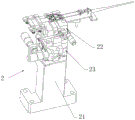
在本技术方案中,所述器件耦合平台2包括装设于工作台7的承载座21、设置于承载座21的承载治具22以及设置于承载座21与承载治具22之间的平面调节装置23,所述平面调节装置23用于调整承载治具22的平面度。具体地,所述平面调节装置23由三个角度调节台组合而成的,其可以对承载治具22的各个方向的倾斜角度进行调节,从而实现承载治具22的平面度进行调节,由此提高光学透镜与耦合器件的光纤耦合的精确度。
作为优选的,所述承载治具22包括承载部221和设置于承载部221的一侧的压紧部222,所述承载部221的上表面凹设有用于承载外界的耦合器件的容置固定腔223,所述承载部221设置有用于对耦合器件的侧面进行压紧固定的第一压紧组件224;所述压紧部222设置有用于对耦合器件的一端进行压紧的第二压紧组件225。在实际应用中,如图12所示,耦合器件包括有用于承载光学透镜的承载框01以及与承载框01连接的软电路板02。所述承载部221的容置固定腔223用于容设耦合器件的承载框01,第一压紧组件224用于将承载框压紧于容置固定腔223内;所述压紧部222用于对耦合器件的软电路板02进行压紧固定。
具体地,所述第一压紧组件224包括转动设置于承载部221的转动凸轮2241、与转动凸轮2241连接的把手2242、滑动设置于承载部221的一侧的压紧块2243、转动设置于压紧块2243靠近转动凸轮2241的一端的滚轮2244以及用于驱动压紧块2243始终靠近转动凸轮2241以使滚轮2244与转动凸轮2241始终抵触的第一弹性组件2245,所述承载部221位于压紧块2243的一侧设置有与容置固定腔223连通的滑动槽226,所述压紧块2243设有与滑动槽226滑动配合的顶杆2246。第一弹性组件2245包括螺栓和弹簧,螺栓贯穿压紧块2243后与承载部221螺接,所述弹簧套设于螺栓外,弹簧的一端与承载部221的侧面抵触,弹簧的另一端与螺栓的螺母抵触。在实际应用中,在弹簧的弹力作用下,压紧块2243始终靠近承载部221,使得其滚轮2244与转动凸轮2241始终抵触,并使得顶杆2246突伸进容置固定腔223内以将耦合器件的承载框压紧;当需要取出耦合器件时,只需转动把手2242以带动转动凸轮2241转动,转动的转动凸轮2241便可推动滚轮2244远离转动凸轮2241的转动中心移动,滚轮2244的移动进而带动压紧块2243远离承载部221移动,移动的压紧块2243便带动顶杆2246沿着滑动槽226移出容置固定腔223,由此释放对耦合器件的压紧。该第一压紧组件224的结构设计简单紧凑,操作简便快捷,且压紧固定效果好。
具体地,所述第二压紧组件225包括与承载部221的一端连接的载料块2251、滑动设置于载料块2251的上方的压料块2252以及用于驱动压料块2252始终压合在载料块2251上的第二弹性组件2253。所述第二弹性组件2253包括螺栓和弹簧,所述螺栓贯穿载料块2251后与压料块2252螺接,弹簧的一端与载料块2251的底面抵触,弹簧的另一端与螺栓的螺母抵触。在实际应用中,在安装耦合器件时,将压料块2252相对载料块2251顶开,接着将耦合器件的软电路板放置在载料块2251与压料块2252之间,然后松开压料块2252,压料块2252便在弹簧的弹力作用力下将软电路板压紧于载料块2251上。该第二弹性组件2253的结构设计简单紧凑,操作简便快捷,且压紧固定效果好。
在本技术方案中,所述夹料机构1包括与位移驱动机构6驱动连接的固定座11、设置于固定座11的夹料装置12、用于驱动夹料装置12相对固定座11升降的升降驱动装置14,所述UV固化装置15设置于固定座11并用于对夹料装置12所夹持的光学透镜进行UV光固化。在实际应用中,升降驱动装置14驱动夹料装置12相对固定座11升降,以使夹料装置12能够将其所夹持的光学透镜放置在耦合器件上或者将放置在耦合器件上的光学透镜取走。
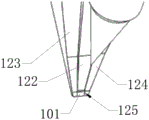
作为优选的,所述夹料装置12包括滑动设置于固定座11并与升降驱动装置14驱动连接的夹料固定块121、设置于夹料固定块121的中部夹头122、滑动设置于夹料固定块121并分别位于中部夹头122的两侧的左侧夹头123和右侧夹头124以及用于驱动左侧夹头123和右侧夹头124同步靠近或者远离中部夹头122的夹头移动驱动装置13;所述左侧夹头123的夹料端和右侧夹头124的夹料端均突伸出中部夹头122的底端,所述左侧夹头123与右侧夹头124所突出中部夹头122的部分与中部夹头122的底端围设成用于容设外界的光学透镜的夹料腔125。
在对光学透镜进行夹取时,升降驱动装置14驱动夹料固定块121相对固定座11下降,以使夹料装置12的中部夹头122的底端与透镜上料机构4所承载的光学透镜的顶部抵触,接着夹头移动驱动装置13驱动左侧夹头123和右侧夹头124同步靠近中部夹头122移动,直至左侧夹头123和右侧夹头124分别与光学透镜的两侧抵触,由此将光学透镜夹持在夹料腔125内;具体地,所述中部夹头122的长度等于或者小于光学透镜的长度,左侧夹头123和右侧夹头124的同步移动,可以使得光学透镜的中心面与中部夹头122的中心面重合,由此一方面确保夹料机构1的夹持精确度,另一方面使得固定座11以中部夹头122的中心坐标作为基准而移动,进而确保夹料机构1的移动精准度,从而提高光学透镜的上料精度,由此保证光学透镜的贴合质量。具体地,所述左侧夹头123、中部夹头122和右侧夹头124均为上粗下尖的矩形条装,其结构的设计既可以增强夹头的强度,使夹头不易发生断裂;也可以使得夹头的夹料端能够夹取细小的矩形透镜。
在本技术方案中,所述中部夹头122的底端设置有吸料孔,所述吸料孔经由气管接头126与外界的抽真空装置连通。当光学透镜被左侧夹头123和右侧夹头124夹持在夹料腔125时,此时中部夹头122的底端的吸料孔可以将光学透镜吸住,以防止光学透镜在移送过程中发生位置的偏移甚至掉离夹料腔125。
所述夹头移动驱动装置13包括滑动设置于夹料固定块121并分别位于中部夹头122的两侧的两个夹料滑动块131和装设于夹料固定块121并分别用于驱动两个夹料滑动块131同步靠近或者远离中部夹头122的两个移动驱动器132,所述左侧夹头123和右侧夹头124分别连接于两个夹料滑动块131靠近中部夹头122的一侧。具体地,两个所述移动驱动器132均为电磁式直线电机,每个电磁式直线电机的输出端对应与一个夹料滑动块131驱动连接。电磁式直线电机的结构简单紧凑,体积小,易于安装,以便于驱动夹料滑动块131的移动;且其运动惯量低,动态响应性能和定位精度高,有利于提高夹料滑动块131的移动精度。
所述升降驱动装置14包括滑动设置于固定座11的升降块141、用于驱动升降块141升降的升降驱动器142、滑动设置于固定座11的限位块143以及设置于固定座11并位于限位块143的下方的挡止块144,所述夹料固定块121滑动设置于固定座11,所述升降块141的一端与夹料固定块121连接,升降块141的另一端与限位块143连接。具体地,所述升降驱动器142为驱动气缸,驱动气缸的活塞杆与升降块141驱动连接。升降驱动器142驱动升降块141升降,升降的升降块141带动夹料固定块121连带夹料机构1升降;同时,升降块141的升降也带动限位块143升降,挡止块144用于挡止限位块143的移动,进而对升降块141的升降进行限位,以防止夹料机构1发生过度的位移而导致光学透镜被压坏。
在本技术方案中,所述透镜上料机构4包括设置于工作台7并位于器件耦合平台2的一侧的上料基座41、滑动设置于上料基座41的上料治具42以及用于驱动上料治具42靠近或者远离器件耦合平台2的上料移动驱动装置43,所述上料治具42靠近器件耦合平台2的一端设置有储料盘44和不良品料盘45。具体地,所述上料移动驱动装置43为电机、丝杆与丝杠螺母配合的驱动机构,上料治具42与丝杠螺母连接。在实际应用中,在对光学透镜进行上料或者对不良品进行卸料时,上料移动驱动装置43驱动上料治具42靠近器件耦合平台2移动,直至上料治具42移动至夹料机构1的夹料位置,此时,夹料机构1便可夹取储放于储料盘44内的光学透镜并移送至器件耦合平台2所承载的耦合器件上,或者夹料机构1可以将不良品移送至不良品料盘45内以对不良品进行收集。
作为优选的,所述上料治具42设置有分别用于容置储料盘44和不良品料盘45的第一容置腔421和第二容置腔422,所述第一容置腔421和第二容置腔422均设置有用于对储料盘44和不良品料盘45进行压紧的第三压紧组件423。具体地,第三压紧组件423的结构和作用与第一压紧组件224的结构和作用是相同的,在这里不再赘述。该结构的设计简单紧凑,可以使得储料盘44和不良品料盘45能够从上料治具42上取出,以便于工人对料盘的更换,由此提高光学透镜上料的效率。
在本技术方案中,所述光学透镜耦合机还包括设置于工作台7的监控相机8。由于光学透镜和耦合器件的体积较小,肉眼不易观看到光学透镜的工作情况,由此,采用监控相机8用于对光学透镜与耦合器件的光纤耦合过程进行监控,所监控的画面通过外部的显示器显示,以便于操作员能够实时观察到本光学透镜耦合机的工作状态。
以上所述,仅是本发明较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明以较佳实施例公开如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当利用上述揭示的技术内容作出些许变更或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明技术是指对以上实施例所作的任何简单修改、等同变化与修饰,均属于本发明技术方案的范围内。
Claims (8)
1.一种光学透镜耦合机,其特征在于:包括工作台、设置于工作台的器件耦合平台、设置于工作台的定位机构、设置于工作台的透镜上料机构、设置于工作台的UV固化装置、活动设置于工作台的夹料机构、活动设置于工作台的点胶机构以及用于驱动夹料机构和点胶机构均能够沿着工作台的X轴、Y轴及Z轴移动的位移驱动机构,所述器件耦合平台用于承载外界的耦合器件,所述透镜上料机构用于将外界的待耦合的光学透镜输送至夹料机构的取料位置,所述夹料机构用于夹取光学透镜,所述定位机构用于对夹料机构所夹取的光学透镜进行视觉定位,所述点胶机构用于对器件耦合平台所承载的耦合器件进行点胶,所述UV固化装置用于对夹料机构所夹持的光学透镜进行UV光固化;
所述夹料机构包括与位移驱动机构驱动连接的固定座、设置于固定座的夹料装置、用于驱动夹料装置相对固定座升降的升降驱动装置,所述UV固化装置设置于固定座并用于对夹料装置所夹持的光学透镜进行UV光固化;
所述夹料装置包括滑动设置于固定座并与升降驱动装置驱动连接的夹料固定块、设置于夹料固定块的中部夹头、滑动设置于夹料固定块并分别位于中部夹头的两侧的左侧夹头和右侧夹头以及用于驱动左侧夹头和右侧夹头同步靠近或者远离中部夹头的夹头移动驱动装置;所述左侧夹头的夹料端和右侧夹头的夹料端均突伸出中部夹头的底端,所述左侧夹头与右侧夹头所突出中部夹头的部分与中部夹头的底端围设成用于容设外界的光学透镜的夹料腔。
2.根据权利要求1所述的一种光学透镜耦合机,其特征在于:所述器件耦合平台包括装设于工作台的承载座、设置于承载座的承载治具以及设置于承载座与承载治具之间的平面调节装置,所述平面调节装置用于调整承载治具的平面度。
3.根据权利要求2所述的一种光学透镜耦合机,其特征在于:所述承载治具包括承载部和设置于承载部的一侧的压紧部,所述承载部的上表面凹设有用于承载外界的耦合器件的容置固定腔,所述承载部设置有用于对耦合器件的侧面进行压紧固定的第一压紧组件;所述压紧部设置有用于对耦合器件的一端进行压紧的第二压紧组件。
4.根据权利要求1所述的一种光学透镜耦合机,其特征在于:所述透镜上料机构包括设置于工作台并位于器件耦合平台的一侧的上料基座、滑动设置于上料基座的上料治具以及用于驱动上料治具靠近或者远离器件耦合平台的上料移动驱动装置,所述上料治具靠近器件耦合平台的一端设置有储料盘和不良品料盘。
5.根据权利要求1所述的一种光学透镜耦合机,其特征在于:所述定位机构包括设置于工作台并位于器件耦合平台的一侧的三个定位相机,三个所述定位相机相互垂直设置于工作台。
6.根据权利要求1所述的一种光学透镜耦合机,其特征在于:所述点胶机构包括设置于夹料机构的一侧并与位移驱动机构驱动连接的点胶固定座、滑动设置于点胶固定座的点胶器以及装设于点胶固定座并用于驱动点胶器升降的点胶升降驱动器。
7.根据权利要求1所述的一种光学透镜耦合机,其特征在于:所述工作台的底部设置有多个减震器。
8.根据权利要求1所述的一种光学透镜耦合机,其特征在于:所述夹料机构的一侧设置有与位移驱动机构驱动连接的高度检测装置,所述高度检测装置用于检测夹料机构所夹持的光学透镜与器件耦合平台所承载的耦合器件之间的高度。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910865234.5A CN110657146B (zh) | 2019-09-12 | 2019-09-12 | 一种光学透镜耦合机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910865234.5A CN110657146B (zh) | 2019-09-12 | 2019-09-12 | 一种光学透镜耦合机 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110657146A CN110657146A (zh) | 2020-01-07 |
| CN110657146B true CN110657146B (zh) | 2021-04-06 |
Family
ID=69037001
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910865234.5A Active CN110657146B (zh) | 2019-09-12 | 2019-09-12 | 一种光学透镜耦合机 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110657146B (zh) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111103666B (zh) * | 2020-01-21 | 2021-06-22 | 中南大学 | 多通道cob光模块自动耦合封装系统及方法 |
| CN111266735A (zh) * | 2020-02-21 | 2020-06-12 | 中南大学 | 基于功率检测的四件式光器件耦合焊接设备 |
| CN111308624B (zh) * | 2020-04-13 | 2021-06-15 | 中南大学 | 用于多路单模cob模块的透镜耦合方法及设备 |
| CN111470313A (zh) * | 2020-04-13 | 2020-07-31 | 中南大学 | 用于多路单模cob模块透镜耦合的上料机构 |
| CN111443437B (zh) * | 2020-04-13 | 2021-03-30 | 中南大学 | 基于音圈电机驱动的透镜耦合夹具 |
| CN111367029B (zh) * | 2020-04-13 | 2021-05-04 | 中南大学 | 用于多路单模cob模块的透镜耦合设备 |
| CN111443438B (zh) * | 2020-04-13 | 2021-03-16 | 中南大学 | 基于音圈电机驱动的透镜耦合设备 |
| CN111290088B (zh) * | 2020-04-13 | 2021-06-29 | 中南大学 | 发光元件的透镜耦合方法及装置 |
| CN111474668A (zh) * | 2020-05-11 | 2020-07-31 | 湖南中南鸿思自动化科技有限公司 | 用于coc准直透镜耦合的夹具 |
| CN111522104B (zh) * | 2020-05-11 | 2021-07-27 | 中南大学 | 用于coc准直透镜耦合设备 |
| CN111736290B (zh) * | 2020-06-23 | 2022-03-11 | 武汉光迅科技股份有限公司 | 一种透镜夹持装置 |
| CN111884038B (zh) * | 2020-07-15 | 2021-11-02 | 中南大学 | 阵列半导体激光器反射镜耦合装置 |
| CN111884035B (zh) * | 2020-07-15 | 2021-11-02 | 中南大学 | 基于光束分析仪检测的阵列半导体激光器反射镜耦合装置 |
| CN113436178A (zh) * | 2021-07-02 | 2021-09-24 | 鹏城实验室 | 机器人状态检测方法、装置、设备、程序产品及存储介质 |
| CN113777724A (zh) * | 2021-09-15 | 2021-12-10 | 中南大学 | 准直式微透镜自动耦合封装方法 |
| CN115318579A (zh) * | 2022-08-31 | 2022-11-11 | 武汉精立电子技术有限公司 | 一种用于微型光机镜头的定位机构、贴合系统及方法 |
| CN115657258B (zh) * | 2022-12-29 | 2023-03-21 | 武汉锐科光纤激光技术股份有限公司 | 自动化光纤准直器组装设备及控制方法 |
| CN117075292B (zh) * | 2023-10-13 | 2024-01-26 | 武汉来勒光电科技有限公司 | 一种透镜准直设备、系统及方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI624957B (zh) * | 2015-08-19 | 2018-05-21 | 乾坤科技股份有限公司 | 光電模組及其製造方法 |
| CN106793516B (zh) * | 2016-12-29 | 2023-08-08 | 苏州猎奇智能设备有限公司 | 一种自动耦合机 |
| US11435527B2 (en) * | 2017-03-20 | 2022-09-06 | Nyfors Teknologi Ab | Optical fiber cleaving device, a method for cleaving an optical fiber and use of an optical fiber cleaving device |
| CN108051378A (zh) * | 2018-02-09 | 2018-05-18 | 广东中科奥辉科技有限公司 | 全自动荧光相关光谱仪光路校准机构 |
| CN208569116U (zh) * | 2018-08-15 | 2019-03-01 | 绍兴中科通信设备有限公司 | 一种光器件自动接收耦合装置 |
| CN109149048B (zh) * | 2018-08-30 | 2024-07-23 | 惠州攸特电子股份有限公司 | 滤波器控制板电阻片焊接设备 |
| CN109343181B (zh) * | 2018-10-15 | 2019-10-08 | 中南大学 | 一种cob光模块自动耦合点胶固化方法及系统 |
| CN110045465B (zh) * | 2019-04-10 | 2024-02-06 | 中南大学 | 一种透镜耦合系统及方法 |
-
2019
- 2019-09-12 CN CN201910865234.5A patent/CN110657146B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN110657146A (zh) | 2020-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110657146B (zh) | 一种光学透镜耦合机 | |
| CN111498487A (zh) | 一种屏下摄像头贴合组装设备 | |
| CN112076947A (zh) | 一种粘接组装设备 | |
| CN108176801B (zh) | 铆钉自动装配设备 | |
| CN109434451B (zh) | 雷达导航组装设备 | |
| CN111422041B (zh) | 一种汽车玻璃附件粘结设备 | |
| CN212886101U (zh) | 一种组装装置 | |
| CN111645101A (zh) | 一种微型器件夹持与吸取耦合的设备及其加工方法 | |
| CN216631664U (zh) | 检测设备 | |
| CN210881262U (zh) | 一种撕膜装置 | |
| CN210590943U (zh) | 适用于触摸屏的软对硬贴合上下料结构 | |
| CN111323420A (zh) | 一种用于微光学组件的自动化组装测试装置 | |
| CN215903058U (zh) | 一种镜头组件组装设备 | |
| CN108516676B (zh) | 物料转移设备 | |
| CN214622050U (zh) | 检测机构及检测设备 | |
| CN109967302B (zh) | 一种旋转式点胶设备及其点胶方法 | |
| CN111331863B (zh) | 一种镜头组装线 | |
| CN112676831A (zh) | 一种镜头组件组装设备 | |
| CN112317966A (zh) | 一种高精度摄像头印字贴膜装置 | |
| CN109290765B (zh) | 一种摄像头自动装配机 | |
| CN110404738A (zh) | 一种无源耦合设备 | |
| CN115847038A (zh) | 一种全自动镜片组装点胶一体机及其生产线 | |
| CN115741012A (zh) | 一种基于视觉的钢片摩擦片安装设备 | |
| CN211190784U (zh) | 一种光学镜头点胶设备 | |
| CN111933562B (zh) | 一种高精度智能分选设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |