CN110279351B - 带有可拆卸垫的自主地板清洁 - Google Patents
带有可拆卸垫的自主地板清洁 Download PDFInfo
- Publication number
- CN110279351B CN110279351B CN201910553127.9A CN201910553127A CN110279351B CN 110279351 B CN110279351 B CN 110279351B CN 201910553127 A CN201910553127 A CN 201910553127A CN 110279351 B CN110279351 B CN 110279351B
- Authority
- CN
- China
- Prior art keywords
- pad
- cleaning
- robot
- cleaning pad
- identification
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






























Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/24—Floor-sweeping machines, motor-driven
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4002—Installations of electric equipment
- A47L11/4008—Arrangements of switches, indicators or the like
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/408—Means for supplying cleaning or surface treating agents
- A47L11/4088—Supply pumps; Spraying devices; Supply conduits
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
Landscapes
- Electric Vacuum Cleaner (AREA)
- Cleaning Implements For Floors, Carpets, Furniture, Walls, And The Like (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
一种自主地面清洁机器人,包括:垫保持器,配置成保持可拆卸的清洁垫;驱动器系统,在被垫保持器保持的清洁垫清洁地面时操纵所述机器人越过地面;垫传感器,配置用于感应在所述清洁垫上可见的识别图案并且根据所述识别图案所指示的清洁垫的类型产生一信号;以及控制器,配置用于根据所述信号从多个清洁模式中选择一种清洁模式,以及根据所选择的清洁模式控制所述机器人。
Description
本申请是申请日为2016年8月17日、申请号为201610933579.6、发明名称为“带有可拆卸垫的自主地板清洁”的发明专利申请的分案申请。
相关申请的交叉引用
本申请要求2015年11月9日提交的14/936,236号美国专利申请的优先权,其为2015年8月17日提交的14/828,285号美国专利申请的延续。上述申请以其全部内容引入本文作为参考。
技术领域
本公开涉及通过使用清洁垫的自主机器人的地板清洁。
背景技术
瓷砖地面和台面经常需要清洁,有些需要擦拭以去除干燥的污物。各种清洁器具可用来清洁硬质表面。一些器具包括清洁垫,其可为可拆卸地附接于该器具。所述清洁垫可为一次性的或可重复使用的。在一些实施例中,清洁垫设计为适合专用器具或者可设计为可用于一种以上的器具。
传统上,湿抹布用于清除地面的脏污和其他污物(例如,灰尘、油、食物、酱、咖啡、咖啡粉)。人们在盛有水和皂液或者专用地板清洁剂的水篮中蘸湿抹布,并用该抹布擦拭地面。在一些情况下,使用者可能需要进行前后移动擦拭以清除特别脏的区域。之后该使用者将抹布浸入同一个水篮中以清洗抹布并继续擦拭地板。另外,该用户可能需要跪在地板上来清洁地面,这可能是繁琐且累人的,特别是当地面覆盖了一大片区域时。
人们可以使用拖把来拖地而不需跪在地上。拖把或者自主机器人上附接一清洁垫可擦拭并移除表面上的固体脏物,并且无需使用者弯腰来清洁所述表面。
发明内容
在一些实施例中,一种自主地板清洁机器人包括机器人主体、控制器、驱动器、清洁垫保持器、以及清洁垫传感器。所述机器人主体限定了前驱方向并且支撑所述控制器。所述驱动器支撑机器人主体并设置为驱使机器响应于所述控制器的指令而越过一表面。所述清洁垫保持器设置于机器人主体的底侧,且用于在该清洁机器人工作过程中保持可拆卸清洁垫。所述清洁垫传感器用于感应由所述清洁垫保持器所承载的清洁垫的特征,并产生相应的信号。所述控制器响应于由清洁垫传感器产生的所述信号并用来根据清洁模式来控制所述机器人,所述清洁模式作为由清洁垫传感器产生的信号的功能从一组多个机器人清洁模式中选择。
在一些实施例中,所述清洁垫传感器包括辐射发射器和辐射检测器中的至少一个。所述辐射检测器可呈现出在可见光范围内的峰值光谱响应。所述特征可为清洁垫表面上的彩色油墨,所述清洁垫传感器感应所述特征的光谱响应,并产生响应于所感应的光谱响应的信号。
在一些情况下,所述信号包括所感应的光谱响应,且该控制器将所感应的光谱响应同与控制器可操作地相连的存储元件中存储的彩色油墨的索引中所存的光谱响应进行比较。所述清洁垫传感器可包括辐射检测器,其具有响应辐射的第一和第二通道,每个所述第一通道和第二通道感应所述特征的光谱响应的一部分。所述第一通道可在可见光范围内呈现峰值光谱响应。所述垫传感器包括第三通道,感应所述特征光谱响应的另一部分。第一通道在红外光范围内呈现峰值光谱响应。所述清洁垫传感器可包括辐射发射器,其设置为发射第一辐射和第二辐射,并且该清洁垫传感器可感应所述特征对该第一和第二辐射的反辐射,以感应该特征的光谱响应。所述辐射发射器可设置为发射第三辐射,且所述清洁垫传感器可感应所述特征对该第三辐射的反辐射,以感应该特征的光谱响应。
在一些实施方式中,所述特征包括识别元件,每个识别元件都具有第一区域和第二区域。所述清洁垫传感器可设置为独立地感应所述第一区域的第一反射率以及第二区域的第二反射率。该清洁垫传感器可包括用于照射所述第一区域的第一辐射发射器,用于照射第二区域的第二辐射发射器,以及用于从第一区域和第二区域接收反辐射的光电检测器。所述第一反射率可实质上大于所述第二反射率。
在一些实施例中,所述多个机器人清洁模式中的每个都定义了喷洒计划和导航行为。
在一些实施例中,地板清洁机器人清洁垫包括垫主体和安装板。所述垫主体具有相对的宽表面,包括一清洁面和一安装面。所述安装板穿过垫主体的安装面固定,且具有限定出安装定位器切口的边缘。所述清洁垫为一组具有不同清洁特点的可用清洁垫类型中的一种。所述安装板具有与清洁垫的类型唯一对应的特征,且其被定位为由安装了该清洁垫的机器人的特征传感器所感应。
在一些实施例中,所述特征为第一特征,且所述安装板具有与第一特征旋转对称的第二特征。所述特征可具有与清洁垫类型对应的唯一属性的光谱响应。所述特征可具有与清洁垫类型对应的唯一的反射率。所述特征可具有与清洁垫类型对应的唯一的射频特征。所述特征可包括与清洁垫类型对应的唯一的可读条码。所述特征可包括与清洁垫类型对应的唯一的定向图像。所述特征可具有与清洁垫类型对应的唯一的颜色。所述特征可包括具有第一和第二部分的识别元件,所述第一部分具有第一反射率且第二部分具有第二反射率,所述第一反射率大于第二反射率。所述特征可包括与清洁垫类型对应的唯一的射频识别标签。所述特征可包括由安装板形成的切口,切口之间的距离对于清洁垫类型是唯一的。
在一些实施例中,在一组不同的自主机器人清洁垫中,每个清洁垫都包括一垫主体和一安装板。所述垫主体具有相对的宽表面,包括一清洁面和一安装面。所述安装板穿过垫主体的安装面固定,且具有限定出安装定位器切口的边缘。每个清洁垫的安装板具有板型识别特征,其与清洁垫的类型唯一对应,且被该清洁垫所安装的机器人感应。
在一些情况下,所述特征为第一特征,且所述安装板具有与第一特征旋转对称的第二特征。所述特征可具有与清洁垫类型对应的唯一属性的光谱响应。所述特征可具有与清洁垫类型对应的唯一的反射率。所述特征可具有与清洁垫类型对应的唯一的射频特征。所述特征可包括与清洁垫类型对应的唯一的可读条码。所述特征可包括与清洁垫类型对应的唯一的定向图像。所述特征可具有与清洁垫类型对应的唯一的颜色。所述特征可包括具有第一和第二部分的识别元件,所述第一部分具有第一反射率且第二部分具有第二反射率,对于该组中的第一清洁垫来说,所述第一反射率大于第二反射率,对于该组中的第二清洁垫来说,所述第二反射率大于第一反射率。所述特征可包括与清洁垫类型对应的唯一的射频识别标签。所述特征可包括由安装板形成的切口,切口之间的距离是与清洁垫类型唯一对应的。
在一些实施例中,清洁地板的方法包括将一清洁垫附接于一自主地板清洁机器人的底侧表面,将该机器人放置于需清洁的地面上,并初始化地面清洁操作。在地面清洁工作中,所述机器人感应所附接的清洁垫并且从一组多个清洁垫类型中识别出该清洁垫的类型,之后根据所识别的清洁垫类型而选择的清洁模式自主清洁地板。
在一些情况下,所述清洁垫包括识别标记。所述识别标记可包括彩色油墨。所述机器人可通过感应清洁垫的所述识别标记来感应附接的清洁垫。感应清洁垫的识别标记可包括感应所述识别标记的光谱响应。
在其他的实施方式中,所述方法还包括使所述清洁垫从自主地板清洁机器人的底侧表面弹出。
在一些实施例中,自主地板清洁机器人包括机器人主体,由该机器人主体支撑的控制器,以及支撑该机器人主体驱使其响应控制器的指令而越过地面的驱动器。该机器人还包括附接于机器人主体的底侧的清洁垫保持器,用于在清洁机器人工作过程中承载可拆卸的清洁垫。所述可拆卸的清洁垫包括一安装板以及一安装面。所述安装板附接于所述安装面。该机器人还包括一清洁垫传感器,以感应在该可拆卸的清洁垫上的特征并基于该特征产生一信号。所述特征至少部分由卡片衬垫上的切口所限定。所述安装板使得清洁垫传感器能够检测所述特征,且控制器响应于由该清洁垫传感器产生的信号而执行各项操作。所述操作包括基于上述信号从多种清洁模式中选择一种清洁模式,并根据所选择的清洁模式控制所述机器人。
在一些实施例中,所述安装面可包括包覆用于吸收地面上的液体的吸收层的包覆层。所述特征可进一步由所述包覆层上的标记所限定。所述标记可占据比所述切口大的区域。所述切口能使清洁垫传感器检测所述标记。
在一些实施例中,所述特征可包括至少部分由所述标记和所述切口限定的识别元件。每个识别元件可具有一第一区域及一第二区域。所述清洁垫传感器可设置为独立地感应所述第一区域的第一反射率和所述第二区域的第二反射率。
在一些实施例中,所述第一和第二反射率中的至少一个由所述卡片衬垫的反射率所限定。所述第一和第二反射率中的至少一个可由所述标记的反射率所限定。
在一些实施例中,所述识别元件可限定一周界,且所述标记可占据延伸出所述周界的区域。
在一些实施例中,所述清洁垫传感器可包括一第一辐射发射器以照射所述第一区域,一第二辐射发射器以照射所述第二区域,以及一光电探测器以接收从所述第一区域和第二区域反射辐射,并基于所述反射辐射生成所述信号。
在一些实施例中,所述控制器可用来通过执行操作来选择清洁模式。所述操作可包括基于所述第一反射率和所述第二反射率确定各识别元件中的每一个的状态,基于各识别元件中的每一个的状态来确定所述特征的状态,将所述特征的状态与存储于存储器中的各种状态的索引进行比较,并基于所述比较从各个清洁模式中选择所述清洁模式。
在一些实施例中,所述各识别元件中的每一个的所述状态可以包覆层上的所述标记的可检测性作为基础。
在一些实施例中,所述第一反射率可实质上大于所述第二反射率。
在一些实施例中,所述弧标记可包括彩色油墨。所述清洁垫传感器可用来感应所述标记的光谱响应。所述信号可与所感应的光谱响应一致。
在一些实施例中,所述清洁垫传感器可包括辐射检测器,其具有响应于辐射的第一及第二通路。所述第一通路和所述第二通路中的每个都可感应所述标记的光谱响应的一部分。
在一些实施例中,所述第一通路可在可见光范围内展示一峰值光谱响应。
在一些实施例中,所述清洁垫传感器可包括一辐射发射器,用于发射一第一辐射以及一第二辐射。所述清洁垫传感器可包括标记对所述第一和第二辐射的反射以感应所述标记的光谱响应。
在一些实施例中,各种所述清洁模式中的每个都可限定一喷洒时间表以及导航路径。
在一些实施例中,在一组不同类型的自主机器人清洁垫中,每个所述清洁垫都包括一具有相对宽表面的垫主体,包括一清洁面以及一安装面。每个所述清洁垫还包括一指示清洁垫类型的清洁垫类型识别特征,且一安装板横跨所述垫主体的安装面固定。所述安装板包括一切口,其至少部分限定所述清洁垫类型识别特征。所述安装板使得机器人的清洁垫传感器能够检测所述清洁垫类型识别特征。
在一些实施例中,所述安装面可包括一包覆层,其包裹用来吸收地面上的液体的吸收层。所述清洁垫类型识别特征可进一步由所述包覆层上的一标记所限定。所述标记可占据比所述切口所占区域更大的区域。所述切口能使所述清洁垫传感器能够检测所述标记。
在一些实施例中,所述特征可包括识别元件,其至少部分由所述标记及所述切口限定。每个识别元件可具有一第一区域及一第二区域。所述清洁垫传感器可设置为独立地感应所述第一区域的第一反射率和所述第二区域的第二反射率。
在一些实施例中,所述第一和第二反射率中的至少一个可由所述卡片衬垫的反射率所限定。所述第一和第二反射率中的至少一个可由所述标记的反射率所限定。
在一些实施例中,所述识别元件可限定一周界,且所述标记可占据延伸出所述周界的区域。
在一些实施例中,所述标记可包括彩色油墨。所述清洁垫传感器可用于感应所述标记的光谱响应。
本文中所描述的各实施方式包括以下特征。所述清洁垫包括一识别标记,其具有可使所述清洁垫从具有不同特征的识别标记的其他各种清洁垫中被识别出的特征。所述机器人包括感应硬件,以感应所述识别标记从而确定所述清洁垫的类型,且该机器人的控制器可基于所述感应硬件检测到的内容来执行判断所述清洁垫类型的感应算法。所述机器人选择一种清洁模式,包括,例如,导航路径以及喷洒时间表信息,所述机器人使用这些信息来清洁房间。结果是,用于简单地将所述清洁垫附接于所述机器人,之后该机器人可选择所述清洁模式。在一些情况下,所述机器人可能检测不到所述识别标记而确定发生了一个错误。
从以上所描述的特征以及本文所描述的其他特征中,这些实施方式进一步派生出以下优点。例如,机器人的使用需要减少人工干预的次数。由于该机器人可以根据清洁模式自主做出决策而无需用户输入,从而使该机器人可以更好地以自主模式操作。此外,由于用户不需要人工选择清洁模式,因此较少发生用户误操作。所述机器人也能识别出用户可能不会注意的错误,例如清洁垫相对于机器人的意外移动。用户不需要通过例如仔细检查所述清洁垫的材料或纤维来用眼睛识别清洁垫的类型。所述机器人能够容易地检测所述唯一的识别标记。该机器人也能通过感应所使用清洁垫的类型而快速开始清洁操作。
附图说明
以下附图和描述阐释了一个或多个实施例的细节。本发明其余的特征、目的、以及优点将从以下描述和附图、以及权利要求中变得更清楚。
图1A是使用示例性清洁垫的用于清洁的自主移动机器人的立体图。
图1B是图1A所示自主移动机器人的侧视图。
图2A是图1A的示例性清洁垫的立体图。
图2B是图2A所示示例性清洁垫的分解立体图。
图2C是图2A所示示例性清洁垫的顶视图。
图3A是用于所述清洁垫的示例性附连机构的底视图。
图3B是所述附连机构处于固定位置的侧视图。
图3C是用于所述清洁垫的所述附连机构的顶视图。
图3D是用于所述清洁垫的所述附连机构处于打开位置的截面图。
图4A至4C是所述机器人向地面喷洒液体时的顶视图。
图4D是所述机器人擦拭地面时的顶视图。
图4E描述了所述机器人以藤蔓方式向一个房间挪动。
图5是图1所示移动机器人的控制器的示意图。
图6A是带有第一清洁垫识别特征的清洁垫的顶视图。
图6B是具有第一清洁垫识别读取器的清洁垫附连机构的顶视图。
图6C是图6B所示清洁垫附连机构的分解图。
图6D是用来确定附接于图6B所示示例性附连机构的清洁垫的类型的清洁垫识别算法的流程图。
图7A是带有第二清洁垫识别特征的清洁垫的顶视图。
图7B是具有第二清洁垫识别读取器的清洁垫附连机构的顶视图。
图7C是图7B所示清洁垫附连机构的分解图。
图7D是用来确定附接于图7B所示示例性附连机构的清洁垫的类型的清洁垫识别算法的流程图。
图8A-8F示出带有其他清洁垫识别特征的清洁垫。
图9是描述清洁垫识别系统的使用的流程图。
图10是包括识别顺序的清洁垫的分解立体图。
图11是包括识别顺序的清洁垫的顶视图。
图12是包括识别标记的清洁垫的分解立体图。
图13是包括识别标记的清洁垫的顶视图。
不同附图中的相同的附图标记表示相同的元件。
具体实施方式
以下详细描述的是一个自主移动清洁机器人,其能够通过在擦拭地面的同时对房间进行导航来清洁房间的地面。所述机器人能够向地面喷洒清洁液,并使用附接于该机器人底侧的清洁垫擦拭地面。所述清洁液能够,例如,溶解和悬浮地面上的尘屑。所述机器人能基于附接于该机器人的清洁垫自主选择一清洁模式。该清洁模式可包括,例如,由该机器人和/或清洁方式分配的清洁液的用量。在一些情况下,所述清洁垫清洁地面时可不使用清洁液,从而该机器人无需将向地面喷洒清洁液作为所选择的清洁模式的一部分。在其他情况下,用于清洁地面的清洁液的用量可根据由该机器人识别的清洁垫的类型而改变。一些清洁垫可能需要更大的清洁液用量来提高擦拭效果,而其他清洁垫可能需要相对较小的清洁液用量。所述清洁模式可包括选择导航路径,其可使所述机器人以特定方式移动。例如,如果该机器人将向地面喷洒清洁液作为清洁模式的一部分,则该机器人可采用促使其前后擦拭的移动方式以有效地喷洒及吸收所述清洁液,其中可能包含有悬浮的尘屑。该清洁模式的导航及喷洒特征可随着一个类型的清洁垫到另一个类型的清洁垫而有很大的不同。所述机器人能通过检测附接于该机器人的清洁垫的类型而选择这些特征。如以下将要详细描述的,所述机器人自主检测清洁垫的识别特征以便识别所附接的清洁垫的类型,并根据所识别的清洁垫的类型来选择一清洁模式。
机器人的总体结构
参照图1A,在一些实施方式中,一自主移动机器人100,重量小于5lbs (例如,小于2.26kg)且具有重心CG,导航并清洁地面10。所述机器人100 包括主体102,由一驱动器(未示出)支撑,其能够根据例如具有x,y,及θ分量的驱动命令来操纵所述机器人100越过所述地面10。如图所示,所述机器人主体102是正方形的。在其他实施方式中,所述主体102可具有其他形状,例如圆形,椭圆形,泪滴形,矩形,由正方形或矩形的前部和圆形的后部组成的形状,或者任何这些形状组成的纵向不对称的形状。该机器人主体102具有前部104和后部(指向尾部)106。所述主体102还包括底部(未示出)和顶部108。
沿着机器人主体102的底部,一个或多个后侧悬崖传感器(未示出)设置于机器人100后侧边角中的一个或两个处,且一个或多个前侧悬崖传感器 (未示出)设置于所述移动机器人100的前侧边角中的一个或两个处,用来检测地面10上的陡壁或其他落差并防止机器人100从这些地板边缘跌落。所述悬崖传感器可为机械的跌落传感器或者基于光学的接近传感器,例如IR (红外)对,双发射器、单接收器,或双接收器、单发射器基于光的IR接近传感器,其向下朝向地面10。在一些实施例中,所述悬崖传感器以相对于机器人主体102成一定角度的方式设置,从而它们切断机器人100的边角,跨接在机器人100的两侧壁间,并尽可能严密地覆盖所述边角以检测超过高度阈值的地面高度差。将所述悬崖传感器设置于机器人100的边角附近确保了当机器人100悬于地面落差时其能立即启动并防止机器人的轮行进超过所述落差边缘。
所述主体102的前部104载有一活动的缓冲器110,用于检测纵向(A,F) 或横向(L,R)的碰撞。所述缓冲器110具有与机器人主体102互补的形状且在机器人主体102的前侧延伸使所述前部104的整体尺寸比机器人主体 102的后部106宽。所述机器人主体102的底部载有附接清洁垫120。主要参照图1B,所述机器人主体102的底部包括轮121,当机器人100在地面 10上行动时,其转动支撑机器人主体102的后部106。当机器人100在地面 10上行动时,所述清洁垫120支撑机器人100主体102的前部104。在一个实施方式中,所述清洁垫120延伸到所述缓冲器110的宽度以外,从而该机器人100可使清洁垫120的外侧边缘一直到并且沿着难以擦到的表面或伸入缝隙中,例如墙面和地面连接处。在另一实施方式中,所述清洁垫120延伸至机器人的边缘且并不伸出清洁器保持器(未示出)之外。在这些实施例中,所述清洁垫120能够直接在端部切断且在侧面上是能吸收的。所述机器人100可将清洁垫120的边缘推至顶到墙面。当机器人100以墙壁跟随运动移动时,清洁垫120的位置还能通过延长清洁垫120的边缘使清洁垫120清洁所述表面或者墙壁的缝隙。由此所述清洁垫120的延伸能使机器人100在机器人主体102的行程以外清洁裂缝和缝隙。
位于机器人主体102内部的储液器122盛有清洁液124(例如清洁剂,水,和/或去垢剂)并且能够盛装例如170-230mL的清洁液124。在一个实施例中,所述储液器122具有200mL的液体容量。所述机器人100具有一液体施加器126,其通过机器人主体102内部一管路与所述储水器122相连。所述液体施加器126可为一喷洒器或者喷洒结构,具有一顶喷嘴128a和一底喷嘴128b。所述顶喷嘴128a和底喷嘴128b垂直堆放在液体施加器126 的凹部129内,且与平行于地面10的水平面成一定角度。所述喷嘴128a-128b 彼此间隔开,从而顶喷嘴128a向前和向下喷洒的相对较远以覆盖机器人100 前的底面10的区域,并且另一喷嘴128b向前向下喷洒的相对较近以在地面 10的区域留下所供液体的向后供给,其在机器人100的前侧,但相比于由顶喷嘴128a喷洒的液体区域更靠近机器人100。在一些情况下,所述喷嘴128a,128b完成各自的喷洒循环后在喷嘴的开口处吸收少许液体,从而在每个喷洒过程中清洁液124不会从喷嘴128a、128b处漏出或滴落。
在清洁液施加器126的其他实施例中,多个喷嘴设置为在不同方向喷洒液体。所述液体施加器可将液体输送至穿过缓冲器110的底部而非外部,直接在机器人100之前滴落或喷洒所述清洁液。在一些实施例中,所述清洁液施加器为超细纤维布或带,液体分散刷,或者喷洒器。在其他实施例中,所述机器人100包括一单独的喷嘴。
所述清洁垫120和机器人100的尺寸和形状适于将清洁液从储液器122 向吸水清洁垫120传送过程中在机器人100的动态运动中保持前后平衡。所述液体被分配从而该机器人能在地面10上持续推进清洁垫120,而不会使逐渐饱和的清洁垫120和逐渐变空的储液器122抬高机器人100的后部且向下倾斜机器人100的前部104,而这会向机器人100施加向下的抑制运动力。由此,即使清洁垫120完全饱和且储液器变空,所述机器人100也能推动清洁垫120越过地面10。所述机器人100能追踪行进过的地面区域和/或储液器122中剩余的液体的量,并向用户提供更换清洁垫120和/或填充储液器 122的声音的和/或可见的提醒。在一些实施方式中,如果清洁垫120完全饱和又或者需要更换,而还有地板需要清洁时,所述机器人100会停止移动并在地面10上停留在原地。
所述机器人100的顶部108包括提手135,用于使用户提起该机器人100。图1A所示的提手135处于抬起状态以便提起。当处于折叠状态时,所述提手135处于该机器人100的顶部108的一凹部中。所述顶部108还包括一拨动按键(toggle button)136,设置于提手135下边,其能激活垫释放机构,以下将会详述。箭头138指示了拨动方向。如以下将要详述的,拨动该拨动按键136会促使清洁垫释放机构以将清洁垫120从机器人100的清洁垫保持器上拆下来。用户也可按下清洁按键140以启动机器人100并使该机器人100 开始清洁工作。所述清洁按键140也可用于其他机器人操作,例如关闭机器人100。
关于机器人100的整体构造的其他细节可见序号为14/077,296、名称为“自主表面清洁机器人”、2013年11月12日提交的美国专利申请,序号为 61/902,838、名称为“清洁垫”、2013年11月12日提交的美国临时专利申请,以及序号为62/059,637、名称为“表面清洁垫”、2014年10月3日提交的美国临时专利申请,每件上述申请的全部内容引入本文作为参考。
清洁垫构造
参照图2A,所述清洁垫120包括吸收层201,外包覆层204,以及卡片衬垫206。所述吸收层201和包覆层204一起形成清洁垫120的垫主体,其从地面上吸水并支撑所述卡片衬垫206。所述清洁垫120具有直接切断的端部,从而吸收层201暴露于所述清洁垫120的两端。所述包覆层204并不将清洁垫120的端部207密封且压缩吸收层201的端部207,从而所述清洁垫 120的全部长度都能吸水且清洁。吸收层201的所有部分都不会被包覆层204 压缩而导致不能吸水。另外,在清洁工作最后,清洁垫120的吸收层201防止清洁垫120被湿透且防止端部207在清洁过程完成时由于吸收的清洁液过重而歪斜。所吸收的清洁液牢固地保存在吸收层201中,从而清洁液不会从清洁垫120中滴落。
参照图2B,所述吸收层201包括第一、第二和第三层201a、201b和201c,但也可以有附加层或者为更少层。在一些实施方式中,所述吸收层201a-201c 能够彼此粘合或彼此固定。
所述包覆层204是无纺布多孔材料,其包围吸收层201。所述包覆层204 可包括一水刺布层和一磨料层。所述磨料层可设置在包覆层的外表面上。所述水刺布层可通过一工艺形成,如水织、气织或水针,其通过使纤维通过多道细的、高压水流而使松散的纤维网编织形成片状结构。所述水力针刺 (hydroentangling)工艺能将纤维材料缠绕成复合无纺布。这些材料由于其提升的性能或成本结构,而使其在众多擦拭应用中具有性能优势。
所述包覆层204包围所述吸收层201并防止吸收层201直接接触地面 10。所述包覆层204可为具有天然或人造纤维(例如水刺布或纺粘布)的柔韧材料。清洁垫120下方地面10的液体传送通过包覆层204进入吸收层201。包围吸收层201的所述包覆层204是一传送层,其防止吸收层201中的吸水原料暴露。
如果清洁垫120的包覆层204吸水过多,该清洁垫120会对移动越过地板10产生过大的阻力且会难以移动。如果阻力太大,机器人,例如,当试图移动清洁垫120越过地面10时可能难以克服所述阻力。再次参照图2A,所述包覆层204拾起被所述磨料外层疏松的污垢和废物,且可在地面10上留下一薄层清洁液124,其可被空气风干而不会在地板10上留下条纹痕迹。所述的薄层清洁液可为,例如,1.5到3.5ml/平米之间且优选地在合理的时间(例如,2分钟到10分钟)内被风干。
优选地,所述清洁垫120在吸收清洁液124后不会显著膨胀或变大,并且使清洁垫厚度的增量最小。清洁垫120的这个特点防止机器人100由于清洁垫120变大而导致的倾斜或俯仰。所述清洁垫120具有足够的刚性以支撑机器人前部的重量。在一个实施例中,所述清洁垫120可吸收180ml或者储液器122中所存液体总量的90%。在另一实施例中,所述清洁垫120吸收约 55到60ml的清洁液124且完全饱和的外包覆层204吸收约6到8ml的清洁液124。
部分清洁垫的所述包覆层204可构造用来吸水。在一些情况下,所述包覆层204是平滑的,以便防止在地面上产生细微划痕。所述清洁垫120可包括以下清洁剂成分中的一种或多种:丁氧基,烷基苯,二烷基二甲基氯化铵,聚氧乙烯蓖麻油,直链烷基苯磺酸盐,乙醇酸——其作为表面活性剂,用来腐蚀水垢和矿物沉积物等。各种清洁垫还可包括香味剂,抗菌剂或防霉防腐剂。
参照图2A至2C,所述清洁垫120包括粘接于清洁垫120的顶面(例如所述包覆层204)的纸板衬垫层(cardboard backing layer)或卡片衬垫(card backing)206。如以下将要被详述的,当卡片衬垫206(以及清洁垫120)装载到机器人100上时,所述卡片衬垫206的安装面202面向机器人100。所述机器人100可通过感应卡片衬垫206或者安装面202上的特征来识别所加载的清洁垫120的类型。虽然卡片衬垫206已经被描述为纸板材料,但是在其它实施方式中,卡片衬垫的材料可以是将清洁垫保持到位使得清洁垫在机器人运动期间不会显著平移的任何硬质材料。在某些情况下,清洁垫可以是刚性塑料材料,其可以是可清洗的并且可重复使用的,诸如聚碳酸酯。
卡片衬垫206突出超过清洁垫120的纵向边缘,并且卡片衬垫206的突出纵向边缘210附连到机器人100的垫保持器(将在下面参照图3A-3D描述)。卡片衬垫206可以是0.02至0.03英寸厚(例如,0.5mm至0.8mm之间)、68至72mm宽、以及90至94mm长。在一个实施方式中,卡片衬垫 206是0.026英寸厚(例如,0.66mm)、70mm宽和92mm长。卡片衬垫206 在两侧涂覆有防水涂层,诸如蜡或聚合物或防水材料的组合,诸如蜡/聚乙烯醇、聚胺,以帮助防止卡片衬垫206在湿润时崩解。
卡片衬垫206限定沿着卡片衬垫206的突出纵向边缘210定心的切口 212。卡片衬垫还包括在卡片衬垫206的侧边缘上的第二组切口214。切口 212、214关于垫120的纵向中心轴线YP和垫120的横向中心轴线XP是中心对称的。
在一些情况下,清洁垫120是一次性的。在另一些情况下,清洁垫120 是有耐用塑料背衬的可重复使用微纤维布垫。所述布垫可以是可洗的,并且能够机器干燥而不会溶解或分解背衬。在另一示例中,可洗的微纤维布垫包括附连机构,以确保将清洁垫固定到塑料背衬,并允许背衬在洗涤之前被拆掉。一个示例性附连机构可以包括Velcro或附连到清洁垫和塑料背衬两者上的其它钩环附连机构设备。另一种清洁垫120旨在被用作一次性干布,并且包括单层穿刺纺粘或水刺布材料,其具有用于截留毛发的暴露纤维。清洁垫 120可以包括增加粘着性特性用于保留污垢和碎屑的化学处理。
对于已识别的清洁垫120类型,机器人100选择相应的导航行为和喷洒计划。例如,清洁垫120可以被识别为以下之一:
·可带有香味并预皂洗的湿擦湿清洁垫。
·可带有香味、预皂洗,并且需要的清洁液比湿擦湿清洁垫少的潮擦清洁垫。
·可带有香味、用矿物油浸透,并且不需要任何清洁液的干式除尘清洁垫。
·可以重复使用,并且可以使用水、清洁剂、香味剂或其它清洁液体清洁地面的可洗清洁垫。
在一些示例中,湿擦清洁垫、潮擦清洁垫和干式除尘清洁垫是单次使用的一次性清洁垫。湿擦清洁垫和潮擦清洁垫可被预潮或预湿,使得垫在除去包装时含有水或其它清洁液。干式除尘清洁垫可以单独地用矿物油浸透。可以与清洁垫的各种类型关联的导航行为和喷洒计划将在后面参照图4A-4E 和表1-3更详细地描述。
清洁垫保持和附连机构
现在仍参考图3A-3D,清洁垫120通过垫保持器300被固定到机器人 100。垫保持器300包括关于关于垫保持器300的底侧上的纵向中心轴线YH 定心的突出部304,并且其沿着在垫保持器300的底侧上的侧向中轴线XH 定位。垫保持器300还包括沿着在垫保持器300的底侧上的纵向中心轴线 YH定位的突出部306,并且其关于在垫保持器300的底侧上的侧向中心轴线XH定心。在图3A中,在垫保持器300的纵向边缘上的凸起的突出部306 被保持夹324a遮蔽,所述保持夹324a以虚线图示出,使得凸起的突出部306 可见。
清洁垫120的切口214与垫保持器300的相应突出部304接合,而清洁垫120的切口212与垫保持器300的相应突出部306接合。突出部304、306 将清洁垫120与垫保持器300对准,并且通过防止侧向和/或横向滑移而将清洁垫120相对固定地保持到垫保持器300。切口212、214和突出部304、306 的构造允许清洁垫120从两个相同方向(彼此相对180度)中的任一个上安装到所述垫保持器300。在释放机构322被触发时,垫保持器300也可以更容易地释放清洁垫120。配合的凸起突出部和切口的数量在其它实施例中可能有所不同。
因为凸起突出部304、306延伸进入切口212、214,清洁垫120因此通过切口突出部保持系统而对抗旋转力保持就位。在一些情况下,如本文所述,机器人100在擦洗运动中移动,并且在一些例子中,垫保持器300摆动 (oscillate)清洁垫120以用于额外擦洗。例如,机器人100可在12-15mm 的轨道上摆动附连的清洁垫120以擦洗地板10。机器人100还可以施加1 磅或更少的向下推力到所述垫上。通过将在卡片衬垫206上的切口212、214 与突出部304、306对准,垫120在使用过程中相对垫保持器300保持静止,并且包括摆动动作的擦洗动作的施用直接地从垫保持器300通过垫120的各层传递,而没有传递移动的损失。
参照图3B-3D,垫释放机构322包括可移动的保持夹324a或唇部,其通过夹持卡片衬垫206的突出纵向边缘210而将清洁垫120牢固地保持就位。不可动的保持夹324b也支撑清洁垫120。垫释放机构322包括滑动向上通过垫保持器300中的狭槽或开口的可动保持夹324a和弹出突出部(eject protrusion)326。在一些实施方式中,保持夹324a、324b可包括钩环紧固件,而在另一实施例中,保持夹324a、324b可包括夹子或保持支架,以及选择性地可移动的夹子或保持支架,以选择性地释放背衬用于拆卸。其它类型的保持器可以用于将清洁垫120连接到机器人100,诸如按扣、夹子、支架、粘合剂等,其可被构造为允许所述清洁垫120的释放,例如在激活垫释放机构322后。
垫释放机构322可以被推入向下的位置(图3D)以释放清洁垫120。弹出突出部326在清洁垫120的卡片衬垫206上向下推动。如上面参照图1A 所描述的,用户可以拨动所述拨动按钮136以启动垫释放机构322。在拨动所述拨动按钮后,弹簧致动器(未示出)旋转垫释放机构322,以移动保持夹324a远离卡片衬垫206。之后弹出突出部326移动穿过垫保持器300的狭槽,并推动卡片衬垫206,并以此将清洁垫120推出垫保持器300。
用户通常将清洁垫120滑入垫保持器300内。在上述示例中,清洁垫120 可以被推入垫保持器300内以与保持夹324接合。
导航行为和喷洒计划
再次参考图1A-1B,机器人100可以执行根据已装载在垫保持器300上的清洁垫120类型的各种导航行为和喷洒计划。清洁模式-其可以包括导航行为和喷洒计划-根据装载到垫保持器300内的清洁垫120而变化。
导航行为可以包括直线运动图案、藤蔓图案、辫形图案,或这些图案的任意组合。也可能是其它图案。在直线运动图案中,机器人100大致在直通道径上移动,以跟随由直边限定的障碍物,诸如墙壁。鸟足(birdfoot)状图案的连续和重复使用被称为藤蔓图案或蔓生图案。在藤蔓图案中,机器人100 重复地执行一个鸟足状图案,其中机器人100在沿大体向前的轨迹逐渐推进的同时来回移动。所述鸟足图案的每次重复沿着大致向前的轨迹推进机器人 100,并且鸟足图案的重复执行可以允许机器人100以大致向前的轨迹穿越地面。藤蔓图案和鸟足图案将在下面参考图4A-4E更详细地描述。在辫形图案中,机器人100在整个房间内来回穿梭移动,使得机器人100在每次穿越房间之间垂直于图案的纵向运动略微移动,以形成一系列穿越地面的大致平行的行。
在下面描述的例子中,各喷洒计划通常限定了浸湿阶段、清洁阶段和结束阶段。各喷洒计划的不同阶段限定了喷洒的频率(基于行走距离)和喷洒的持续时间。所述浸湿阶段在开启机器人100并启动清洁操作之后立即开始。在浸湿阶段中,清洁垫120需要额外的清洁液以充分地浸湿所述清洁垫120,使得清洁垫120吸收了足够的清洁液以启动清洁操作。在清洁阶段中,清洁垫120所需的清洁液比在浸湿阶段中所需的少。机器人100通常喷洒清洁液,以便保持清洁垫120的湿度但不会使清洁液将地板10上弄得泥泞。在结束阶段中,清洁垫120所需的清洁液比在清洁阶段中所需的少。在结束阶段中,清洁垫120通常是完全饱和的,因而只需要吸收足够用于蒸发的液体,否则可能会变干,妨碍从地板10上去除污垢和碎屑。
参照下表1,由机器人100识别的清洁垫120的类型决定了要在机器人 100上执行的清洁模式的喷洒计划和导航行为。喷洒计划-包括浸湿周期、清洁阶段和结束阶段-根据清洁垫120的类型而不同。如果机器人100确定清洁垫120是湿擦清洁垫、潮擦清洁垫或可洗清洁垫,则机器人100执行喷洒计划,其具有对鸟足图案的每一个部分或多个鸟足图案限定的特定喷洒持续时间。在机器人100穿越房间时,机器人100执行使用藤蔓和辫形图案的导航行为,而在机器人100绕房间的周界或房间内物体的边缘移动时,其执行使用直线运动图案的导航行为。虽然喷洒计划已被描述为具有三个不同的阶段,但在一些实施方式中,喷洒计划可以包括多于三个阶段或少于三个阶段。例如,除了浸湿阶段和结束阶段之外,所述喷洒计划可以具有第一和第二清洁阶段。在其它情况下,如果机器人构造为用提前浸湿的清洁垫运行,则可以不需要所述浸湿阶段。类似的,导航行为可以包括其它行动图案,如锯齿形或螺旋形图案。虽然所述清洁操作被描述为包括浸湿阶段、清洁阶段以及结束阶段,但在一些实施方式中,所述清洁操作可只包括清洁阶段和结束阶段,且所述浸湿阶段可在清洁操作前进行单独操作。
如果机器人100确定清洁垫120是干式除尘清洁垫,则机器人执行这样的喷洒计划,即机器人100完全不喷洒清洁液124。在机器人100穿越房间时,机器人100可以执行使用辫形图案的导航行为,而在机器人100绕房间的周界走行时,其执行使用直线运动图案的导航行为。

表1:示例性喷洒计划和导航行为
在表1所述的示例中,虽然机器人被描述为在浸湿阶段与清洁阶段中使用相同的图案(例如,藤蔓图案、辫形图案),在一些示例中,浸湿阶段可以使用不同的图案。例如,在浸湿阶段中,机器人可以滴落较大的一滩清洁液,并向前和向后越过液体前进以浸湿所述垫。在这样的实施中,在清洁阶段之前,机器人不会启动辫形图案以穿越地面。参照图4A-4D,机器人100 的清洁垫120擦洗地面10,并且吸收在地面10上的液体。如以上参照图1A 所描述的,机器人100包括在地面10上喷洒清洁液124的液体施加器126。机器人100擦洗并移除污迹22(例如,污垢、油、食物、酱、咖啡、咖啡渣),它们连同所施加的用于分解和/或松动污迹22的液体124一起被垫120吸收。一些污迹22可以具有粘弹性性质,其既表现出粘性性质又表现出弹性性质 (例如,蜂蜜)。清洁垫120是吸收性的,并且可以是研磨性的,以便研磨污迹22并从地面10上松动它们。
还如上所述,液体施加器126包括向地面10上分散清洁液124的顶喷嘴128a和底喷嘴128b。顶喷嘴128a和底喷嘴128b可被构造为以彼此不同的角度和距离喷洒清洁液124。参照图1和图4B,顶喷嘴128a在凹部129 中成角度并间隔开,使得顶喷嘴128a向前和向下以相对更长的长度喷洒清洁液124a,以覆盖在机器人100前方的区域。底喷嘴128b在凹部129中成角度并间隔开,使得底喷嘴128b以相对更短的长度向前和向下喷洒液体,以覆盖在机器人100前方但更靠近机器人100的区域。参考图4C,顶喷嘴 128a-在喷洒清洁液124a之后-在前施加液体区域402a中分配清洁液124a。底喷嘴128b-在喷洒清洁液124b之后-在后施加液体区域402b中分配清洁液 124b。
参照图4A-4D,机器人100可以通过在向前方向F上朝向障碍物或墙壁 20移动,随后在向后或反向方向A上移动而执行清洁操作。机器人100可在向前驱动方向上驱动第一距离Fd到第一位置L1。随着机器人100向后移动第二距离Ad到第二位置L2,在机器人100越过地面10的已在向前方向F 上穿越的区域至少已经移动距离D后,喷嘴128a、128b同时地在向前和/ 或向下方向上在机器人100前方以较长的长度喷洒清洁液124a,并以较短的长度喷洒清洁液124b。液体124可被施加到基本上等于或小于机器人100 的足迹AF的区域。因为距离D是至少横跨机器人100的长度LR的距离,所以机器人100可确定被机器人100穿过的地板10的区域未被家具、墙壁 20、悬崖、地毯或其它表面或障碍物占用,如果机器人100尚未确定空旷地板10的存在,则清洁液124将施加到所述表面或障碍物上。通过在施加清洁液124之前在前向方向F上移动,然后在相反方向A上移动,机器人100 识别边界,诸如地板变化和墙壁,并防止对这些物品的液体损害。
在一些实施方式中,喷嘴128a、128b在一个区域图案中分配所述清洁液124,所述区域图案在尺寸上延伸一个机器人宽度WR和至少一个机器人长度LR。顶喷嘴128a和底喷嘴128b在两个不同的间隔开的施加液体条带 402a、402b中施加清洁液124,所述条带不延伸到机器人100的全部宽度 WR,使得清洁垫120能够以向前和向后成角度的擦洗运动穿过施加液体条带402a、402b的外边缘(如将在下面参照图4D-4E描述的)。在其它实施方式中,施加液体条带402a、402b覆盖的宽度WS为75-95%的机器人宽度 WR,以及组合长度LS为75-95%的机器人长度LR。在一些示例中,机器人 100只在地面10的已穿越区域上喷洒。在其它实施方式中,机器人100只将清洁液124施加到地面10的该机器人100已经穿越的区域。在一些示例中,施加液体条带402a、402b可以大致是矩形或椭圆形的。
机器人100能够以来回移动从而浸湿清洁垫120和/或擦洗已施加清洁液 124的地面10上。参照图4D,在一个示例中,机器人100以鸟足图案移动通过已经施加了清洁液124的地面10上的足迹区域AF。所描绘的鸟足图案涉及以以下方式移动机器人100:(i)沿中心轨迹450在向前方向F上并且在向后或反向方向A上,(ii)沿左轨迹460在向前方向F上并在相反方向A 上,和(iii)沿右轨迹455在向前方向F上并且在反向方向A上。左轨迹 460和右轨迹455是弧形的,其从沿中心轨迹450的起点向外以弧形延伸。虽然左轨迹和右轨迹455、460已经被描述和表示为弧形,但在其它实施方式中,左轨迹和右轨迹可以是从中心轨迹以直线向外延伸的直线轨迹。
在图4D的例子中,机器人100从位置A沿中心轨迹450朝前向方向F 移动,直到它遇到墙壁20,并在位置B处触发碰撞传感器。机器人100随后在向后方向A上沿中心轨迹移动到距离等于或大于将要被液体施加覆盖的距离。例如,机器人100沿中心轨迹450至少向后移动一个机器人长度l 到位置C,其可以是与位置A相同的位置。机器人100施加清洁液124到基本上等于或小于机器人100的足迹区域AF的区域上,并返回墙壁20。随着机器人返回墙壁20,清洁垫120穿过清洁液124并清洁地面10。在分别转到位置D或位置F之前,机器人100或者沿左轨迹460或者沿右轨迹455 分别从位置F或D撤回到位置G或位置E。在某些情况下,位置C、E和G 可对应于位置A。机器人100然后可以继续完成其剩余的轨迹。每次机器人 100沿着中心轨迹450、左轨迹460和右轨迹455向前和向后移动时,清洁垫120穿过所施加的液体124、擦洗地面10上的污垢、碎屑和其它颗粒物质,并且从地面10吸走脏的液体。清洁垫120的擦洗动作与清洁液124的溶解特性结合使干污渍和污垢分解和松动。由机器人100施加的清洁液124使松动的碎屑悬浮,以便清洁垫120吸收悬浮的碎屑并将其从地面10吸走。
随着机器人100来回驱动,它清洁穿越的区域,并因此提供对地面10 深度擦洗。机器人100的来回运动可以分解在地板10上的污渍(例如,图 4A-4C的污迹22)。之后清洁垫120可以吸收分解的污渍。清洁垫120可以拾取足够的喷洒液体以避免当清洁垫120拾取过多液体时的不均匀的条纹,所述液体例如清洁液124。清洁垫120可以留下液体残余,它可以是水或一些其它清洁剂,其包括含有清洁剂的溶液,以在被擦洗的地面10上提供可见的光泽。在一些示例中,清洁液124包含抗菌溶液,例如含有酒精的溶液。因此,薄层残余不被清洁垫120吸收以允许液体杀死更高比例的病菌。
在一个实施方式中,在机器人100使用需要使用清洁液124的清洁垫120 (例如,湿擦清洁垫、潮擦清洁垫和可洗清洁垫)时,机器人100可以在藤蔓和辫形图案与直线运动图案之间来回切换。机器人100在房间清洁过程中使用藤蔓和辫形图案,并在周界清洁过程中使用直线运动图案。
参照图4E,在另一实施方式中,机器人100在房间465中走行,其遵循路径467执行上述藤蔓图案与直线运动图案的组合。在这个示例中,机器人100沿路径467在机器人100前面脉冲地施加清洁液124。在图4E所示的例子中,机器人100工作在需要使用清洁液124的清洁模式中。机器人100 通过执行藤蔓图案而沿路径467前进,所述藤蔓图案包括鸟足图案的重复。如上文更详细描述的,以每个鸟足图案,机器人100结束在相对其初始位置大致在向前方向的位置处。机器人100根据在下面的表2和表3中示出的喷洒计划操作,其分别对应于藤蔓和辫形图案喷洒计划和直线运动图案喷洒计划。在表2和3中,行进的距离可以被计算为在藤蔓图案中行驶的总距离,这解释了机器人100在藤蔓图案中的弧形轨迹。在本实施例中,喷洒计划包括浸湿阶段、第一清洁阶段、第二清洁阶段和结束阶段。在一些情况下,机器人100可以将行驶距离简单地计算为向前行驶的距离。
| 阶段 | 喷洒次数 | 最小行进距离 | 最大行进距离 | 喷洒时长 |
| 浸湿阶段 | 15次 | 344mm | 344mm | 1.0秒 |
| 第一清洁阶段 | 20次 | 600mm | 1100mm | 1.0秒 |
| 第二清洁阶段 | 30次 | 900mm | 1600mm | 0.5秒 |
| 结束阶段 | 本次剩余 | 1200mm | 2250mm | 0.5秒 |
表2:藤蔓和辫形图案喷洒计划

表3:直线运动图案喷洒计划
在机器人100最初十五次施加液体到地面上时-这对应于喷洒计划的浸湿阶段-机器人100至少每行驶344mm(~13.54英寸,或者稍多于一英尺) 的距离就喷洒清洁液124。每次喷洒持续约1秒的持续时间。浸湿阶段大致对应于包含在房间465的区域470中的路径467,其中,机器人100执行结合藤蔓图案和辫形图案的导航行为。
一旦清洁垫120是充分湿的-这通常对应于机器人100执行喷洒计划的第一清洁阶段时-所述机器人100将每行驶600-1100mm(~23.63-43.30英寸,或二至四英尺)的距离喷洒且持续1秒的时间。这种相对较慢的喷洒频率保证所述垫保持浸湿,而不会过湿或积水。清洁阶段被描绘为包含在房间465 的区域475中的路径467。在预定的喷洒次数内(例如,20次喷洒),机器人遵循清洁阶段的喷洒频率和持续时间。
当机器人100进入房间465的区域480时,机器人100开始第二清洁阶段,并且每行驶900-1600mm(~35.43-~63英寸,或大约三至五英尺)的距离喷洒且持续半秒的时间。这种相对较慢的喷洒频率和喷洒持续时间保持所述垫浸湿而不会过湿,其中,在一些示例中,这可以防止所述垫吸收可能含有悬浮碎屑的额外清洁液。
如在图中所示,在区域480的点491处,机器人100遇到具有直边缘的障碍物,例如,厨房中心岛492。一旦机器人100到达中心岛492的直边缘,导航行为模式从藤蔓和辫形图案切换到直线运动图案。机器人100根据对应于直线运动图案的喷洒计划中的持续时间和频率进行喷洒。
机器人100执行对应于机器人100在整个清洁操作中所处的合计喷洒次数的直线运动图案喷洒计划的阶段。机器人100可以记录喷洒次数,并因此可以选择对应于机器人100在点491处已经喷洒的喷洒次数的直线运动图案喷洒计划的阶段。例如,如果当机器人100到达点491时已经喷洒了36次,则下次喷洒将是第37次喷洒,并且将属于对应于第37次喷洒的直线运动计划。
机器人100围绕中心岛492沿着包含在区域490中的路径467执行直线运动图案。机器人100也可以执行对应于第37次喷洒的阶段,其是在表3 中示出的直线运动图案喷洒计划的第一清洁阶段。因此,在以直线运动沿中心岛492的边缘移动的同时,机器人100每行驶400mm-750mm(15.75-29.53 英寸)的距离施加液体0.6秒。在一些实施方式中,机器人100在直线运动图案中相比在蔓生图案(vining pattern)中施加较少的清洁液,因为机器人 100在蔓生图案中覆盖更小的距离。
假设机器人围绕中心岛492的边缘移动并喷洒10次,则当它在点493 处重新使用藤蔓和辫形图案清洁地板时,机器人将处于清洁操作中的第47 次喷洒处。在点493处,机器人100为第47次喷洒遵循藤蔓和辫形图案喷洒计划,这使机器人100返回到第二清洁阶段中。由此,沿包含在房间465 的区域495中的路径467,机器人100每隔900-1600mm(~35.43-~63英寸,或大约在三至五英尺之间)喷洒。
机器人100继续执行所述第二清洁阶段直至第65次喷洒,在该点处,机器人100开始执行藤蔓和辫形图案喷洒计划的结束阶段。机器人100在行驶约1200至2250mm之间的距离处施加液体,并且持续时间为半秒。这种较不频繁并且较少量的喷洒可对应于清洁操作的结束,在此时,垫120完全饱和并且仅需要吸收足够的液体以满足蒸发或其它干燥,其否则可能会妨碍从地面去除污垢和碎屑。
尽管在上述的例子中,水的施加和/或清洁图案基于通过机器人识别的垫类型进行更改,其它因素也可以被更改。例如,机器人可对特定垫类型提供振动以帮助清洁。振动可以对此是有帮助的,即因为它据信会打破表面张力以帮助移动,并且相比没有振动更好地分解污垢(例如,仅擦拭)。例如,在用湿垫清洁时,垫保持器可使所述垫振动。在用干布清洁时,垫保持器不应振动,因为振动会导致污垢和毛发从所述垫掉出。由此,机器人可以识别所述垫,并且基于所述垫的类型确定是否振动该垫。此外,机器人可以修改振动的频率、振动的程度(例如,垫关于平行于地面的轴线平移的量)和/ 或振动的轴线(例如,垂直于机器人的运动方向、平行于运动方向,或不与机器人的运动方向平行或垂直的另一角度)。
在一些实施方式中,一次性湿垫和潮垫是用清洁溶剂、抗菌溶剂和/或香味剂提前润湿和/或提前浸渍的。一次性湿垫和潮垫可被提前润湿或提前浸渍。
在其它实施方式中,一次性垫不是预润湿的,并且无尘纸层包括木浆。一次性垫的无尘纸层(airlaid layer)可包括木浆和粘接剂,诸如聚丙烯或聚乙烯,并且这种共形化合物比纯木浆的密度小,因此在液体保持性上更好。在一次性垫的一种实施方式中,包覆层是包括聚丙烯和木浆的纺粘材料,并且包覆层如上所述覆盖有聚丙烯熔喷层。熔喷层(meltblown layer)可以由将污垢和水分上拉到垫内的亲水湿润剂处理的聚丙烯制成,并且在一些实施方式中,纺粘包覆层还是疏水性的,使得液体被熔喷层向上吸入,并穿过包覆层进入无尘纸层而不会浸透包覆层。在其它实施方式中,诸如潮垫实施方式中,熔喷层不用亲水湿润剂处理。例如,对于有硬木地板的用户可能期望在机器人上以潮垫模式运行一次性垫,使得较少的液体被喷洒在地板上,并且因此较少的液体被吸收到一次性垫内。在这种使用情况下,快速吸收到无尘纸层或多个无尘纸层不是那么重要。
在一些实施方式中,一次性垫是干垫,其具有无尘纸层,或由木浆或木浆与粘合剂的共混物制成的层,所述粘合剂诸如聚丙烯或聚乙烯。不同于一次性垫的湿版和潮版,干垫可以更薄,比一次性湿/潮垫含有更少的无尘纸材料,使得机器人以最佳高度骑乘在未因液体吸收而压缩的垫上。在一次性干垫的一些实施方式中,包覆层是穿刺纺粘材料,并且可用矿物油处理,诸如 DRAKASOL,其有助于污垢、灰尘和其它碎屑粘着到所述垫上,并且不在机器人完成任务时掉落。出于同样的原因,所述包覆层可以用静电处理进行处理。
在一些实施方式中,可洗垫是一种具有可重复使用的塑料背衬层附连到其上用于与垫保持器配合的微纤维垫。
在一些实施方式中,所述垫是三聚氰胺海绵垫。
控制系统
参考图5,机器人的控制系统500包括操作驱动器510的控制器电路505 (本文中也称为“控制器”)、清洁系统520、具有垫识别系统534的传感器系统530、行为系统540、导航系统550和存储器560。
驱动系统510可以包括轮子,以基于具有x、y和θ分量的驱动指令操纵机器人100越过地面。驱动系统510的轮子将机器人主体支撑在地面之上。控制器505可进一步操作构造为在地面上操纵机器人100的导航系统550。导航系统550的导航命令以行为系统540为基础,所述行为系统540选择可以存储在存储器560中的导航行为和喷洒计划。导航系统550也与传感器系统530连通,以利用碰撞传感器、加速计和机器人的其它传感器确定并发出驱动命令给驱动系统510。
传感器系统530可另外包括3轴加速计、3轴陀螺仪和用于轮子(例如,在图1B中示出的轮子121)的旋转编码器。控制器505可以利用3轴加速计感测的线性加速度估算在x和y方向上的漂移,并且可利用3轴陀螺仪估算在机器人100的航向或取向θ中的漂移。因此,控制器505可以结合由旋转编码器、加速计和陀螺仪采集的数据,以产生对机器人100的整体姿态(例如,位置和方向)的估算。在一些实施方式中,在机器人100执行辫形图案时,机器人100可使用编码器、加速计和陀螺仪从而使机器人100保持在大致平行的行上。陀螺仪和旋转编码器一起可另外被用来执行航位推算算法,以确定机器人100在其环境中的位置。
控制器505操作清洁系统520以一定频率在一定持续时间内启动喷洒命令。喷洒命令可以根据存储在存储器560上的喷洒计划发出。
存储器560还可以进一步装载有对应于特定清洁垫类型的喷洒计划和导航行为,其在清洁操作过程中可以被加载到所述机器人上。传感器系统530 的垫识别系统534包括检测清洁垫特征以确定已被装在机器人上的清洁垫类型的传感器。基于所检测到的特征,所述控制器505可确定清洁垫的类型。垫识别系统534将在下面更详细地描述。
在一些示例中,基于将其覆盖位置存储在地图上,机器人知道它已经到达的位置,所述地图存储在机器人的非临时存储器560上,或者存储于机器人在清洁过程中可通过有线或无线装置访问的外部存储介质中。机器人传感器可以包括相机和/或一个或多个测距激光器,其用于构建空间的地图。在一些示例中,在施加清洁液之前,机器人控制器505使用墙壁、家具、地板变化和其它障碍物的地图以将机器人在足够远离障碍物和/或地板变化的位置处定位和摆姿态。这有利于将液体施加到地面上没有已知障碍物的区域上。
垫识别系统
垫识别系统534可以根据用来使机器人能识别已被附连到机器人底部的清洁垫类型的垫识别方案的类型而变化。以下描述的是垫识别方案的几种不同类型。
离散识别序列
参照图6A,示例性清洁垫600包括安装面602和清洁面604。清洁面 604对应于清洁垫600的底部,并且大致是清洁垫600接触并清洁地面的表面。清洁垫600的卡片衬垫606用作用户可以插入到机器人的垫保持器内的安装板。安装面602对应于其上安装有卡片衬垫606的清洁垫600的主体的外层。机器人使用卡片衬垫606识别布置在机器人上的清洁垫的类型。卡片衬垫606包括标记在安装面602上的识别序列603。识别序列603关于清洁垫600的纵轴和水平轴对称地复制,从而使用户能够以两种取向的任一种将清洁垫600插入机器人内(例如,图1A-1B的机器人100)。
识别序列603是卡片衬垫606的可感测部分,机器人可用其识别用户已经安装到机器人上的清洁垫类型。识别序列603可以具有有限数量的离散状态中的一个,并且机器人检测识别序列603以确定识别序列603表示的离散状态。
在图6A的例子中,识别序列603包括三个识别元件608a-608c,它们共同限定了识别序列603的离散状态。每一个识别元件608a-608c包括左边块 610a-610c和右边块612a-612c,并且块610a-610c、612a-612c可以包括与卡片衬垫606的颜色形成鲜明对比的油墨(例如,暗油墨、亮油墨)。根据有没有油墨,块610a-610c、612a-612c可以处于两种状态中的一种:暗态或亮态。因此,元件608a-608c可以处于四种状态中的一种:亮-亮态、亮-暗态、暗-亮态和暗-暗态。那么识别序列603有64个离散状态。
每个左边块610a-610c以及每个右边块612a-612c可被设置(例如,在制造过程中)为暗或亮态。在一个实施方式中,每个块基于在块区域中存在或不存在深色油墨而被置于暗态或亮态。当比所述卡片衬垫606的周界材料更暗的油墨沉积在卡片衬垫606上由块限定的区域中时,块是处于暗态。当油墨未沉积在卡片衬垫606上并且块呈现卡片衬垫606的颜色时,块通常处于亮态。其结果是,亮块通常具有比暗块更大的反射率。虽然块610a-610c、612a-612c已经被描述为基于存在或不存在深色油墨而设置为亮或暗态,但在某些情况下,在制造过程中,块可通过漂白卡片衬垫或施加浅色油墨到卡片衬垫使卡片衬垫的颜色变亮而设置为亮态。因此,在亮态中的块会具有比周围的卡片衬垫更大的亮度。在图6A中,右边块612a、右边块612b和左边块610c处于暗态。左边块610a、左边块610b和右边块612c处于亮态。在一些情况下,暗态和亮态可具有基本上不同的反射率。例如,暗态的反射率可以比亮态低20%、30%、40%、50%等。
各元件610a-610c的状态因此可通过其组成块610a-610c、612a-612c的状态确定。元件可被确定为具有以下四种状态中的一种:
1.亮-亮态,其中左边块610a-610c处于亮态,并且右边块612a-612c处于亮态;
2.亮-暗态,其中左边块610a-610c处于亮态,而右边块612a-612c处于暗态;
3.暗-亮态,其中左边块610a-610c处于暗态,而右边块612a-612c处于亮态;以及
4.暗-暗态,其中左边块610a-610c处于暗态,并且右边块612a-612c处于暗态。
在图6A中,元件608a处于亮-暗态,元件608b处于亮-暗态,而元件 608c处于暗-亮态。
在当前参照图6A-6C描述的实施方式中,亮-亮态可以被保存为错误状态,其被机器人控制器505用来确定清洁垫600是否已被正确到安装在机器人100上,并确定垫600是否已相对于机器人100移动。例如,在一些情况下,在使用过程中,清洁垫600可随着机器人100的转动而水平移动。如果机器人100检测到卡片衬垫606的颜色,而不是识别序列603,则机器人100 可以将这种检测解释为意味着清洁垫600已经平移。暗-暗态也未在下面描述的实施方式中使用,以允许机器人实现这样的识别算法:其简单地将左边块610a-610c的反射率与右边块612a-612c的反射率进行比较,以确定元件 608a-608c的状态。出于使用基于比较的识别算法识别清洁垫的目的,元件 610a-610c用作可以处于两种状态中的一种的位数:亮-暗态和暗-亮态。包括错误状态和暗-暗态,所述识别序列603可具有4^3或64种状态中的一种。不包括错误状态和暗-暗态,如将在下面所描述地简化了识别算法,则元件 610a-610c具有两种状态,因此,识别序列603可以具有2^3或8种状态中的一种。
参照图6B,机器人可以包括垫保持器620,其具有垫保持器主体622和用于检测识别序列603并确定识别序列603的状态的垫传感器组件624。垫保持器620保持图6A的清洁垫600(如参照图2A-2C和3A-3D的所述垫保持器300以及清洁垫120所描述的)。参照图6C,垫保持器620包括容纳印制电路板626的垫传感器组件壳体625。紧固件628a-628b将垫传感器组件 624接合到垫保持器主体622。
电路板626是垫识别系统534(参照图5描述)的一部分,并将发射器/ 检测器阵列629电连接到控制器505。发射器/检测器阵列629包括左发射器 630a-630c、检测器632a-632c、右发射器634a-634c。对于每个元件610a-610c,左发射器630a-630c被定位为照射所述元件610a-610c的左边块610a-610c,右发射器634a-634c被定位为照射所述元件610a-610c的右边块612a-612c,而检测器632a-632c被定位为检测入射在左边块610a-610c和右边块 612a-612c上的反射光。当控制器(例如,图5的控制器505)激活左发射器 630a-630c和右发射器634a-634c时,发射器630a-630c、634a-634c以基本上类似的波长(例如,500纳米)发射辐射。检测器632a-632c检测辐射(例如,可见光或红外辐射),并产生对应于该辐射的照度信号。发射器 630a-630c、634a-634c的辐射可以反射离开模块610a-610c、612a-612c,并且检测器632a-632c可以检测反射辐射。
对准块633在识别序列603之上对准发射器/检测器阵列629。特别地,对准块633分别地在左边块610a-610c之上对准左发射器630a-630c;分别地在右边块612a-612c之上对准右发射器634a-634c;并且对准检测器 632a-632c,使得检测器632a-632c与左发射器630a-630c和右发射器 634a-634c是等距的。对准块633的窗口635将由发射器630a-630c、634a-634c 发射的辐射朝安装面602定向。窗口635还允许检测器632a-632c接收反射离开所述安装面602的辐射。在某些情况下,窗口635被封装(例如,使用塑料树脂)以保护发射器/检测器阵列629免受水分、异物(例如,来自清洁垫的纤维)和碎片。左发射器630a-630c、检测器632a-632c和右发射器 634a-634c沿由对准块限定的平面定位,使得当清洁垫被布置在所述垫保持器620中时,左发射器630a-630c、检测器632a-632c和右发射器634a-634c与安装面602是等距的。发射器630a-630c、634a-634c和检测器632a-632c 的位置被选择为最小化发射器和检测器距左边块和右边块610a-610c、 612a-612c的距离上的变化,使得距离对检测到的模块反射辐射照度的影响最小化。其结果是,对模块610a-610c、612a-612c的暗态施加的油墨暗度和卡片衬垫606的自然色彩是影响各模块610a-610c、612a-612c的反射率的主要因素。
虽然检测器632a-632c已经被描述为距左发射器630a-630c和右发射器 634a-634c是等距的,但是应当理解的是,该检测器还能够或者可选地被定位成使得所述检测器距左边块和右边块是等距的。例如,检测器可被放置为使得从检测器到左边块右边缘的距离与到右边块左边缘的距离是相等的。
同样参照图6A,垫传感器组件壳体625限定了检测窗640,当清洁垫 600被插入到垫保持器620时,所述检测窗在识别序列603的正上方对齐垫传感器组件624。检测窗640允许由发射器630a-630c、634a-634c产生的辐射照射识别序列603的识别元件608a-608c。检测窗640还允许检测器 632a-632c检测反射离开元件608a-608c的辐射。检测窗640的尺寸和形状能够形成为接受对准块633,使得当清洁垫600被装载到垫保持器620时,所述发射器/检测器阵列629靠近清洁垫600的安装面602坐落。每个发射器 630a-630c、634a-634c可以直接地坐落在左边块或右边块610a-610c、 612a-612c中的一个上。
在使用过程中,检测器632a-632c可确定由发射器630a-630c、634a-634c 产生的辐射的反射照度。在左边块610a-610c和右边块612a-612c上入射的辐射朝向检测器632a-632c反射,这进而又产生控制器能够处理并用来确定反射辐射的照度的信号(例如,在电流或电压上的变化)。控制器可以独立地激活发射器630a-630c、634a-634c。
在用户已将清洁垫600插入垫保持器620内之后,机器人的控制器确定已被插入到垫保持器620的垫的类型。如前面所描述的,清洁垫600具有识别序列603和对称序列,使得只要安装面602朝向发射器/检测器阵列629,清洁垫600可以在任一个水平方向上插入。当清洁垫600被插入到垫保持器 620时,卡片衬垫606可擦去对准块633的水分、异物和碎屑。识别序列603 基于所述元件608a-608c的状态提供有关插入垫类型的信息。存储器560通常预装有将识别序列603的每个可能状态与特定清洁垫类型关联的数据。例如,存储器560可以将具有(暗-亮、暗-亮、亮-暗)状态的三元件识别序列与湿擦清洁垫关联。再简要地参照表1,机器人100将通过基于所存储的与湿擦清洁垫相关联的清洁模式选择导航行为和喷洒计划而作出响应。
仍参照图6D,所述控制器启动识别序列算法650以检测和处理由识别序列603提供的信息。在步骤655中,所述控制器激活左发射器630A,其发射朝向左边块610a定向的辐射。辐射反射离开左边块610a。在步骤660 中,控制器接收由检测器632a产生的第一信号。控制器在一段持续时间(例如,10ms、20ms或更多)内激活左发射器630a,其允许检测器632a检测反射辐射的照度。检测器632a检测反射辐射并且产生第一信号,其强度对应于来自左发射器630a的反射辐射的照度。因此,第一信号测量左边块610a 的反射率和反射离开左边块610a的辐射照度。在一些情况下,更大的检出照度产生更强的信号。该信号被输送到控制器,它为照度确定与第一信号的强度成比例的绝对值。在其接收到第一信号之后,控制器将停用左发射器 630a。
在步骤665中,控制器激活右发射器634a,其发射朝向右边块612a定向的辐射。所述辐射反射离开右边块612a。在步骤670中,控制器接收由检测器632a产生的第二信号。控制器在一段持续时间内激活右发射器634a,其允许检测器632a检测反射辐射的照度(illuminance)。检测器632a检测反射辐射并且产生第二信号,其强度对应于来自右发射器634a的反射辐射的照度。因此,第二信号测量右边块612a的反射率和反射离开右边块612a的辐射照度。在一些情况下,更大的照度产生更强的信号。该信号被输送到控制器,它为照度确定与第二信号的强度成比例的绝对值。在其接收到第二信号之后,控制器将停用右发射器634a。
在步骤675中,控制器将左边块610a的测得反射率与右边块612a的测得反射率进行比较。如果第一信号为反射辐射指示更大的照度,则控制器确定左边块610a是在亮态,而右边块612a是在暗态。在步骤680中,控制器确定所述元件的状态。在上述的例子中,控制器将确定元件608a处于亮-暗态。如果第一信号为反射辐射指示较小的照度,则控制器确定左边块610a 是在暗态,而右边块612a是在亮态。其结果是,元件608a处于暗-亮态。因为控制器只需简单地比较块610a、612a的测得反射率值的绝对值,元件 608a-608c状态的判定排除了例如施加到设定为暗态的块组的油墨黑度的轻微变化的干扰,以及在发射器/检测器阵列629和识别序列603的对准上的轻微变化的干扰。
为了确定所述左边块610a与右边块612a具有不同的反射率值,所述第一信号与第二信号相差一个阈值,所述阈值表明左边块610a的反射率与右边块612a的反射率对于控制器断定一个块处于暗态而另一个块处于亮态是足够不同的。该阈值可以基于在暗态中的块的预测反射率和在亮态中的块的预测反射率。阈值还可以考虑环境的光条件。限定610a-610c、612a-612c的暗态的深色油墨可被选择为提供在暗态与亮态之间的足够对比度,所述亮态可以通过卡片衬垫606的颜色限定。在一些情况下,控制器可确定第一和第二信号的不同不足以作出元件608a-608c是在亮-暗态还是暗-亮态的结论。控制器可以被编程为通过将非确定性比较(如上所述)解释为错误状态而识别这些错误。例如,清洁垫600可能未被正确地装载,或者清洁垫600可滑离垫保持器620,使得识别序列603未与发射器/检测器阵列629正确地对准。在检测到清洁垫600已滑离垫保持器620时,控制器可以停止清洁操作,或对用户指示清洁垫600滑离垫保持器620。在一个示例中,机器人100可以发出表示清洁垫600滑离的警报(例如,声音警报、可视警报)。在一些情况下,控制器可周期性地(例如,10ms、100ms、1s等)检查清洁垫600仍然正确地装载在垫保持器620上。其结果是,因为左发射器和右发射器 630a-630c、634a-634c只不过是卡片衬垫606没有油墨的照射部分,由检测器632a-632c接收的反射辐射对于照度可以产生相似的测量值。
在执行步骤655、660、665、670和675之后,控制器可对元件608b和元件608c重复上述步骤,以确定各元件的状态。在对识别序列603的所有元件完成这些步骤之后,所述控制器可确定识别序列603的状态,并从该状态或者确定(i)已经插入到垫保持器620的清洁垫的类型,或者确定(ii) 清洁垫错误已经发生。当机器人100执行清洁操作时,控制器还可以连续地重复识别序列算法650,以确保该清洁垫600还没有从其在垫保持器620上的期望位置偏移。
应当理解的是,控制器确定每个块610a-610c、612a-612c的反射率的顺序可以变化。在某些情况下,代替对每个元件608a-608c重复步骤655、660、 665、670和675,控制器可以同时激活所有的左发射器;接收由检测器产生的第一信号,同时启动所有的右发射器;接收由检测器产生的第二信号;然后将第一信号与第二信号进行比较。在其它实施方式中,控制器顺序地照射每个左边块,然后顺序地照射每个右边块。控制器可以在接收对应于每个块的信号之后做出左边块与右边块的比较。
该发射器和检测器还能够被构造为对在可见光范围(例如,400nm至 700nm)之内或之外的其它辐射波长敏感。例如,发射器可以发射在紫外(例如,300nm至400nm)或远红外(例如,15微米至1mm)范围内的辐射,并且检测器可以响应于在类似范围内的辐射。
虽然图6A的卡片衬垫606被描述为包括标记以形成所述识别序列603,但在一些实施例中,标记可形成在清洁垫的包覆层上并透过清洁垫的卡片衬垫可见。所述清洁垫的安装板提供识别序列且能够让垫识别器访问以检测所述包覆层上的标记。卡片衬垫上的切口或透明部分使所述垫传感器能够检测所述标记并限定识别序列的各块的位置。安装板与包覆层上的标记结合,限定出识别序列。在制造过程中,切口形成在卡片衬垫内块的期望的潜在位置,该块限定了清洁垫类型的不同识别序列。
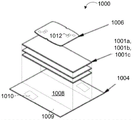
如图10所示,其示出了清洁垫1000的分解图,所述清洁垫1000包括吸收层1001a、1001b、1001c,包覆层1004,以及卡片衬垫1006。所述包覆层1004和吸收层1001a、1001b、1001c一起形成清洁垫1000的垫主体。所述吸收层1001a、1001b、1001c,包覆层1004,以及卡片衬垫1006的材料特征分别与参照图2B所述的吸收层201a、201b、201c,包覆层204,以及卡片衬垫206相似。
如本文所述,所述包覆层1004是无纺布多孔材料的片状结构,其包括内表面1008和与所述内表面1008相反的外表面1009。在当机器人穿越地面的同时所述机器人保持清洁垫1000的清洁操作中,所述包覆层1004的外表面1009与地面接触。所述包覆层1004的内表面1008,在图10中可见,当清洁垫1000组装上时是面对所述吸收层1001a、1001b、1001c的。所述内表面1008在清洁操作过程中并不直接接触地面。所述包覆层1004的外表面 1009,在图10中不可见,当清洁垫1000组装上时是背向所述吸收层1001a、 1001b、1001c的。所述包覆层1004的外表面1009作为所述垫主体的外表面,覆盖了所述垫主体的内部组件,例如吸收层1001a、1001b、1001c。在一些实施方式中,当外表面1009与地面上的清洁液接触时,所述清洁液被从外表面1009吸收穿过包覆层1004到内表面1008且之后进入朝向所述内表面1008的吸收层1001a、1001b、1001c。
包覆层1004包括标记1010。所述标记1010,如图10所示,位于包覆层1004的外表面1009上。在组装了清洁垫1000后,所述标记1010面对卡片衬垫1006。为了形成所述标记1010,包覆层1004的一部分被这样标记,例如,将油墨沉积于该部分或者将彩色纸片或纤维粘贴到该部分。所述标记 1010由这样的油墨形成,例如,其不会由于例如通过包覆层1004和吸收层 1001a、1001b、1001c所吸收的液体而导致扩散穿过该包覆层1004和吸收层1001a、1001b、1001c。
由于标记1010面对卡片衬垫1006,卡片衬垫1006上的切口使标记1010 的一部分穿过卡片衬垫1006可见。外表面1009上的标记1010与卡片衬垫 1006上的切口1012配合而限定了一个识别序列。该识别序列,类似于图6A 的识别序列603,唯一地代表清洁垫1000的一个类型。在清洁垫1000的制造过程中,所述标记1010直接形成(例如,沉积或印制)于包覆层1004上。标记1010被置于包覆层1004上给卡片衬垫1006上的切口1012预期的位置的下方(例如,所述识别序列的块的预期位置)。切口1012的存在使标记1010 的一部分穿过卡片衬垫1006可见,而没有切口的地方是的标记1010的其他部分不能穿过卡片衬垫1006可见。
所述切口1012这样形成,即在制造过程中例如剪掉或冲压掉卡片衬垫 1006的一部分。在清洁垫1000的制造过程中,卡片衬垫1006上的切口1012 的位置和数量已选好,从而切口1012限定了唯一对应于所述清洁垫1000的类型的识别序列。对比于清洁垫600,其卡片衬垫606包括油墨或其他标记以形成识别序列603,而清洁垫1000的卡片衬垫1006不包括用来形成识别序列的印制标记。而且,卡片衬垫1006包括切口1012以使包覆层1004的外表面1009上的标记1010的一部分穿过卡片衬垫1006上切口1012所在的位置可见。所述卡片衬垫1006和切口1012使得机器人的垫传感器(例如,所述垫传感器组件624)能够检测不同阴影或彩色标记的图案。所述图案由切口1012的位置和数量限定。所述切口1012提供了限定识别序列的窗口,并使垫传感器能够检测处于该垫传感器的检测窗口(例如,检测窗口640)下的特定区域的标记1010。
标记1010本身并不限定识别序列。而是切口1012与标记1010一起限定了识别序列。在卡片衬垫1006上的切口1012的任意结合漏出了标记1010 的一部分而形成所述识别序列,其唯一对应于清洁垫1000的类型。切口1012 使其下的标记1010能够反射由垫传感器发射的辐射,且未切口部分使卡片衬垫1006本身能够反射由垫传感器发出的辐射。
在一些实施例中,当标记1010由于切口的存在而能够穿过卡片衬垫 1006可见时,则所述切口以暗态限定了识别序列的一个块。当标记1010由于不存在切口(例如,存在未切口部分)而不能通过过卡片衬垫1006可见时,则卡片衬垫1006以亮态限定了识别序列中的一个块。切口1012和未切口部分的组合形成了具有不同颜色或阴影的标记的图案。这种组合也同样限定了所述识别序列。
在清洁垫1000的制造期间,在一些情况下,包覆层1004围绕吸收层 1001a、1001b、1001c之后,将所述标记1010置于所述包覆层1004之上。当油墨在包覆层1004上形成标记1010时,该标记1010可为在包覆层1004 的内表面和包覆层1004的外表面均为可见的,或者只在包覆层1004的外表面1009是可见的。当包覆层1004围绕了吸收层1001a、1001b、1001c时,标记1010在垫主体的外表面是可见的。如果切口对中了标记1010而使标记 1010穿过卡片衬垫1006中的切口1012可见,则该标记1010可被光学传感器(例如,发射器/检测器阵列629)所检测。
清洁垫1000的制造过程包括在包覆层1004上限定标记1010以及在卡片衬垫1006上形成切口1012的操作。在一些实施方式中,使用非特定于清洁垫类型的印制操作形成所述标记1010,而使用特定于清洁垫的类型的操作制作所述卡片衬垫1006。在该制造过程的一个示例中,为了限定标记1010,油墨或另一种适合的标记被粗略地沉积在包覆层1004的一部分上,当清洁垫1000被机器人的垫保持器(例如,垫保持器620)所保持时,所述部分大致置于所述垫传感器下方。由于标记1010并不限定识别序列的图案,因此在垫上印制的对准要求就可被最小化了。可将一个更大的油墨点分散形成标记1010,并且该分散油墨的操作不必精确。在该制造过程中,油墨或者其他标记不必直接置于在一些实施例中可能是防水表面的卡片衬垫1006上。
为了制作卡片衬垫1006,切口1012与卡片衬垫1006可在例如单次操作中形成,其中该卡片衬垫1006及其对应的切口1012是从卡片胚料中裁出。该操作限定了卡片衬垫1006的形状,也限定了切口1012沿卡片衬垫1006 的位置。该单次操作降低了可能在卡片衬垫1006(例如,卡片衬垫1006的各边缘)和识别序列之间产生的对准差异。所述对准差异可在单独制作卡片衬垫1006和限定识别序列的制造操作过程中显现。
如果识别序列直接印制在卡片衬垫上,则可使用特殊的对准工艺来将印制点与卡片衬垫的各边缘对齐。对于卡片衬垫1006和切口1012而言,该特殊对准工艺并非必须的,因为卡片衬垫1006和切口1012是在单词冲压操作中形成的。通过在单次操作中形成卡片衬垫的形状以及形成切口,所述切口无需上述特殊对准工艺即可与卡片衬垫的各边缘对齐,而如果使用各自独立的工艺形成上述图案,例如,如果首先从卡片胚料中冲压出卡片衬垫,之后再在卡片衬垫上印制上述图案,则需要特殊对准工艺。
如本文所述,相比较于通过直接于卡片衬垫606上分散标记而形成识别序列603,如图11所示的识别序列1103通过标记1115和卡片衬垫1106上的切口而限定。如图11所示,清洁垫1100——例如,使用与参照图10描述的清洁垫1000类似的组件制造——包括安装面1102,清洁面1104,以及卡片衬垫1106。清洁垫1100的垫主体的外表面限定了安装面1102及清洁面 1104。当清洁垫1100被机器人保持时,安装面1102面对机器人,而清洁面 1104背对该机器人。在机器人导航越过地面的清洁操作过程中,该清洁面 1104朝向地面。分散于清洁垫1100的包覆层上并且置于安装面1102上的标记1115穿过卡片衬垫1106的切口可选择地可见或者可检测,以形成识别序列1103,机器人用以检测以识别用户安装于该机器人上的清洁垫的类型。所述标记1115直接位于垫主体的安装面1102上,并且卡片衬垫1106的切口露出所述标记1115,而使该标记1115当清洁垫1000由垫保持器保持时能被机器人的垫传感器所检测。
类似于并参照识别序列603所描述的,该识别序列1103包括识别元件 1108a-1108c,其中每个都包括右边块1112a-1112c和左边块1110a-1110c。如本文所述,该块1110a-1110c、1112a-1112c处于两种状态中的一种:暗态或者亮态。在一些实施方式中,块的暗态对应于检测到油墨且亮态对应于检测到卡片衬垫1106。
每个左边块1110a-1110c和每个右边块1112a-1112c被设置为(在制造过程中)暗态或亮态。每个块的状态是暗态还是亮态是由块的区域内的标记 1115的可检测性决定的。暗态的块1110a-1110c、1112a-1112c由卡片衬垫1106 上存在切口而限定,而亮态的块1110a-1110c、1112a-1112c由卡片衬垫1106 上不存在切口而限定。换言之,标记1115和卡片衬垫1106上的切口限定了块1110a-1110c、1112a-1112c的暗态,而卡片衬垫1106本身限定了亮态。该标记1115为,例如,暗色油墨或者亮色油墨,其将包覆层和安装面1102染色,从而卡片衬垫1106的固有颜色与标记1115形成对比。
图11中,右边块1112a、右边块1112b、以及左边块1110c处于暗态。卡片衬垫1106上的切口对应于这些块定位设置,从而使标记1115透过卡片衬垫1106可见。相反地,左边块1110a、左边块1110b、以及右边块1112c 处于亮态。卡片衬垫1106在这些块的位置没有切口,从而标记1115不能透过卡片衬垫1106可见。也即,卡片衬垫1106位于对应于这些处于亮态的块的位置。
标记1115占据了块1110a-1110c、1112a-1112c下方的区域,从而标记1115 填满了每个块1110a-1110c、1112a-1112c的整体。该标记1115只在块 11100a-1110c、1112a-1112c中可见,其也对应于卡片衬垫1106上的那些切口的位置。该标记1115占据了延伸出块1110a-1110c、1112a-1112c的周围的区域,从而标记1115处于切口的预期可能的位置之下。
再次参照图6C,用于检测识别序列1103的机器人的垫传感器组件624 可类似地用来检测图11的识别序列1103。当清洁垫1100插入垫保持器620 时,所述切口以及之后的识别序列1103定位于该垫传感器组件624之下,从而由发射器630a-630c、634a-634c所发出的辐射穿过窗口635,照射并从清洁垫1100的包覆层的下垫面反射。在用于将清洁垫1100插入垫保持器620 之后,机器人的控制器使用本文所述的识别序列过程来确定已被插入垫保持器620的垫的类型。
在一些情况下,标记1115延伸到识别元件1108a-1108c的周围之外,从而该标记1115占据了比识别序列或者识别序列的单个块更大的面积(例如,比识别序列的面积大5%到25%)。识别序列的面积是指垫传感器用于检测识别序列各块的沿清洁垫1000(例如,沿着卡片衬垫1006)的面积。识别序列的面积包括与识别序列的各块(例如,处于暗态或亮态中的一种)对应的切口1012的预期可能的位置。识别序列的面积,在一些实施例中,与检测窗口的面积等同。在一些情况下,识别序列的面积,例如,比检测窗口的面积大1倍到1.5倍,1.5倍到2倍,或者2倍到3倍。
在一些实施方式中,标记1115占据的面积尺寸为,例如,识别序列1103 的面积或者识别序列各个块的面积的100%到150%、110%到125%、125%到150%、150%到200%、或者200%到250%。在一些实施方式中,标记1010 占据的面积,例如在2平方厘米到4平方厘米之间或2平方厘米到6平方厘米之间。在一些情况下,每个标记1010占据的面积与卡片衬垫1006的面积的比例为,例如,卡片衬垫1006面积的10%到25%或者25%到50%。在一些示例中,标记1115的面积对应于垫传感器的检测窗口的面积。切口的尺寸足够大以使检测器632a-632c能检测从标记1115反射通过检测窗口的辐射。标记1115占据的面积为,例如,检测窗口面积的100%到150%、110%到125%、125%到150%、150%到200%、或者200%到250%。在一些示例中,切口为正方形或长方形的,并且具有约3mm到5mm的宽度。
所述暗态和亮态具有不同的反射率,从而垫传感器检测到暗态和亮态之间的区别。例如,暗态可比亮态的反射率小20%、30%、40%、50%等。暗态的反射率取决于标记1115的反射率,而亮态的反射率取决于卡片衬垫1106 的反射率。为了使识别序列的块在暗态下的反射率小于亮态下的反射率,标记1115在暗态下包括与处于亮态下的块的反射率相比更暗的油墨或者降低块反射率的标记。
在一些情况下,标记1115比卡片衬垫1106更亮。在这些情况中,检测到标记1115则意味着该块处于亮态,而检测到卡片衬垫1106则意味着该块处于暗态。
在一些实施方式中,包覆层具有与卡片衬垫1106不同的反射率。包覆层本身与卡片衬垫1106形成对比,并且在包覆层上不需要附加的油墨用来在安装面1102上形成标记1115。卡片衬垫1106的反射率比包覆层大例如 20%到50%、50%到100%、或者100%到150%(反之亦然)。包覆层本身作为标记其反射率较卡片衬垫1106小。检测到包覆层意味着该块处于暗态,且检测到卡片衬垫1106则意味着该块处于亮态。
图11示出了识别序列1103的每个块为由卡片衬垫1106上的切口形成的矩形部分,但在其他实施方式中,所述部分可为圆形,椭圆形,矩形,正方形,或其他适于提供足够区域用以被机器人的光学传感器(例如,图6C 的发射器/检测器阵列629)检测来检测识别序列1103的形状。虽然切口1012 被描述为限定识别序列中的每个块,但在一些实施例中,单个切口形成包括识别序列的各个块的形状。
虽然图10和11示出了清洁垫上的用于两个识别序列的两个标记,但在一些情况下,单个标记沉积越过包覆层的更大区域,从而该标记限定这两个识别序列。所述单个标记占据的面积在30平方厘米到60平方厘米之间或更大。在一些实施例中,该单个标记沉积的面积为卡片衬垫面积尺寸的75%到 125%。
有色识别标记
参考图7A,清洁垫700包括安装面702和清洁面704,以及卡片衬垫 706。垫700与上述垫基本上相同,但识别标记是不同的。卡片衬垫706包括单色识别标记703。识别标记703关于纵向和水平轴线对称复制,从而用户可以将清洁垫700在任一水平方向上插入机器人100。
识别标记703是卡片衬垫706的可感测部分,机器人可用其识别用户已经安装到机器人上的清洁垫的类型。通过用彩色油墨标记卡片衬垫706(例如,在清洁垫700的制造过程中),识别标记703被创建在卡片衬垫706上。彩色油墨可以是用于唯一地识别不同类型的清洁垫的几种颜色中的一种。其结果是,机器人的控制器可以使用识别标记703识别清洁垫700的类型。图 7A将识别标记703示出为沉积在卡片衬垫706上的油墨圆点。虽然识别标记703已被描述为单色的,在其它实施方式中,识别标记703可以包括图案化的不同色度的点。识别标记703可以包括能够区分识别标记703的色度、反射率,或识别标记703的其它光学特性。
参照图7B和图7C,机器人可包括垫保持器720,其具有垫保持器主体722和用来检测识别标记703的垫传感器组件724。垫保持器720保持清洁垫700(如参照图3A-3D的垫保持器300所描述的)。垫传感器组件壳体725 容纳有包括光电检测器728的印制电路板726。识别标记703的尺寸足够大,从而允许光检测器728检测反射离开识别标记703(例如,识别标记具有约 5mm至50mm的直径)的辐射。壳体725还容纳发射器730。电路板726是垫识别系统534(参照图5描述)的一部分,并且将检测器728和发射器电连接到控制器。检测器728对辐射敏感,并且测量所感测辐射的红色、绿色和蓝色成分。在下面描述的实施方式中,发射器730可发射三种不同类型的光。发射器730可以发射在可见光范围内的光,但应该理解的是,在其它实施方式中,发射器730可发射在红外范围或紫外范围内的光。例如,发射器 730可以发射波长大约623nm的红光(例如,在590nm至720nm之间)、波长大约518nm的绿光(例如,在480nm至600nm之间),和波长约466nm 的蓝光(例如,在400nm至540nm之间)。检测器728可以具有三个独立的通道,每个通道对对应于红色、绿色或蓝色的光谱范围敏感。例如,第一通道(红色通道)可具有对波长在590nm至720nm之间的红光敏感的光谱响应范围,第二通道(绿色通道)可具有对波长在480nm至600nm之间的绿光敏感的光谱响应范围,而第三通道(蓝色通道)可具有对波长在400nm 至540nm之间的蓝光敏感的光谱响应范围。检测器728的每个通道产生对应于反射光中的红光、绿光或蓝光成分的量的输出。
垫传感器组件壳体725限定了发射器窗口733和检测器窗口734。发射极730与发射器窗口733对准,使得发射器730的激活导致发射器730发射穿过窗口733的辐射。检测器728与检测器窗口734对准,使得检测器728 可以接收穿过检测器窗口734的辐射。在某些情况下,窗口733、734被封装(例如,使用塑料树脂)以保护所述发射器730和检测器728免受水分、异物(例如,来自清洁垫700的纤维)和碎屑。当清洁垫700被插入垫保持器720内时,识别标记703被定位在垫传感器组件724之下,使得由发射器 730发射的辐射穿过发射器窗口733、照射识别标记703、并通过检测器窗口 734反射离开识别标记703到检测器728。
在另一实施方式中,垫传感器组件壳体725可以包括用于附加发射器和检测器的附加发射器窗口和检测器窗口以提供冗余。清洁垫700可具有两个或更多的识别标记703,每个都具有相应的发射器和检测器。
对于由发射器730发射的每种光,检测器728的通道检测从识别标记703 反射的光,并且响应于光的检测而产生对应于光的红色、绿色和蓝色成分的量的输出。入射在识别标记703上的辐射朝向检测器728反射,其进而产生控制器能够处理并用来确定反射光的红色、绿色和蓝色成分的量的信号(例如,在电流或电压上的变化)。检测器728然后可以提供携带检测器输出的信号。例如,检测器728能够发出矢量(R,G,B)形式的信号,其中矢量的分量R对应于红色通道的输出,矢量的分量G对应于绿色通道的输出,而矢量的分量B对应于蓝色通道的输出。
发射器730射出的光的数量和检测器728的通道数量确定识别标记703 的识别阶数(the order of identification)。例如,两个发射光和两个检测通道允许四阶识别。在另一实现方式中,两个发射光和三个检测通道允许六阶识别。在上述的实施方式中,三个发射光和三个检测通道允许九阶识别。高阶识别更准确,但是计算成本更高。虽然发射器730已经被描述为发射三种不同波长的光,但是在其它实施方式中,可发射的光的数量可以变化。在对识别标记703的颜色分类上需要更大确信度的实施方式中,可以发射并检测其它的光波长以提高颜色判断的信心。在需要更快的计算和测量时间的实施方式中,可以发射并检测较少的光以减少计算成本和做出识别标记703的光谱响应测量所需的时间。有一个检测器的单光源可以用来识别所述识别标记 703,但可能会导致更大的错误识别数目。
在用户已将清洁垫700插入垫保持器720内后,机器人控制器确定已被插入到垫保持器720的垫的类型。如以上所描述的,只要卡片衬垫706朝向垫传感器组件724,清洁垫700可在任一水平方向上插入。当清洁垫700被插入垫保持器720内时,卡片衬垫706可擦去窗口733、734的水分、异物和碎屑。基于所述识别标记703的颜色,识别标记703提供关于被插入垫的类型的信息。
控制器的存储器通常预装有对应于油墨颜色的颜色索引,所述油墨颜色预期被用作在清洁垫700的安装面702上的识别标记。对于由发射器730发射的每种光的颜色,在颜色索引中的特定颜色的油墨可以具有(R,G,B)矢量形式的对应谱响应信息。例如,在颜色索引中的红色油墨可以具有三种识别响应矢量。第一矢量(红色矢量)对应于检测器728的通道对由发射器730 发射并反射离开红色油墨的红光的响应。第二矢量(蓝色矢量)对应于检测器728的通道对由发射器730发射并反射离开红色墨的蓝光的响应。第三矢量(绿色矢量)对应于检测器728的通道对由发射器730发射并反射离开红色油墨的绿光的响应。预期被用作清洁垫700的卡片衬垫706上的识别标记的每种颜色的油墨具有不同且独特的相关特征,其如上所述地对应于三个响应矢量。响应矢量可以通过对沉积在类似于卡片衬垫706材料的材料上的特定颜色油墨进行反复试验而收集。在索引中预加载的彩色油墨可被选择为使它们沿着光谱彼此远离(例如,紫色、绿色、红色和黑色),以减少错误识别颜色的概率。每种预限定的彩色油墨对应于特定的清洁垫类型。
同样参照图7D,控制器启动识别标记算法750以检测和处理识别标记 703提供的信息。在步骤755中,所述控制器激活发射器730以产生朝向识别标记703定向的红光。红光反射离开识别标记703。
在步骤760中,控制器接收由检测器728产生的第一信号,其包括由检测器728的三个颜色通道测量的(R,G,B)矢量。检测器728的三个通道响应于反射离开识别标记703的光,并且测量红色、绿色和蓝色的光谱响应。检测器728然后产生携带这些光谱响应的值的第一信号,并将第一信号传送到控制器。
在步骤765中,控制器激活发射器730以产生朝向识别标记703定向的绿灯。绿光反射离开识别标记703。
在步骤770中,控制器接收由检测器728产生的第二信号,其包括由检测器728的三个颜色通道测量的(R,G,B)矢量。检测器728的三个通道响应于反射离开识别标记703的光,并且测量红色、绿色和蓝色的光谱响应。检测器728然后产生携带这些光谱响应的值的第二信号,并将第二信号传送到控制器。
在步骤775中,控制器505激活发射器730以产生朝向识别标记703定向的蓝灯。蓝光反射离开识别标记703。在步骤780中,控制器接收由检测器728产生的第三信号,其包括由检测器728的三个颜色通道测量的(R,G,B) 矢量。检测器728的三个通道响应于反射离开识别标记703的光,并且测量红色、绿色和蓝色的光谱响应。检测器728然后产生携带这些光谱响应的值的第三信号,并将第三信号传送到控制器。
在步骤785中,基于在步骤760、770和780中由控制器接收的三个信号,控制器产生识别标记703对加载于存储器中的颜色索引中的彩色油墨的概率匹配。(R,G,B)矢量识别限定识别标记703的彩色油墨,并且控制器可以计算出该组的三个矢量对应于颜色索引中的彩色油墨的概率。控制器可以对索引中的所有彩色油墨计算概率,然后将彩色油墨从最高概率到最低概率排列。在一些示例中,控制器执行矢量操作以对由控制器接收到的信号进行标准化(normalize)。在一些情况下,在将矢量匹配到索引中的彩色油墨之前,控制器计算标准化矢量积或标量积。控制器可考虑环境中的噪声源,例如,环境光可以扭曲检测到的识别标记703的光学特性。
在一些情况下,控制器可以被编程,使得只有在最高概率彩色油墨的概率超过阈值概率(例如,50%、55%、60%、65%、70%、75%)时,控制器才会确定和选择颜色。通过检测识别标记703与垫传感器组件724的错位,阈值概率可以防止在将清洁垫700装载到垫保持器720上时的误差。例如,清洁垫700可在使用期间“离开”垫保持器720并部分地滑出垫保持器720,由此,阻碍垫传感器组件724检测出识别标记703。如果控制器计算彩色油墨在彩色油墨索引中的概率,并且没有任何概率超过阈值概率,则控制器可指示已发生了垫识别错误。阈值概率可以基于识别标记算法750所需的灵敏度和精确度进行选择。在一些实施方式中,一旦确定没有任何概率超过阈值概率,所述机器人将生成警报。在某些情况下,该警报是视觉警报,其中,机器人可以在适当位置停止和/或在机器人上发出闪光。在其它情况下,该警报是听觉警报,其中机器人可以播放指出机器人正在经历错误的口头警报。听觉警报也可以是声音序列,诸如闹铃。
附加地或可选地,控制器能够为每个算出概率计算误差。如果最高概率彩色油墨的误差大于阈值误差,则控制器可以指示发生了垫识别错误。类似于上述阈值概率,所述阈值误差防止清洁垫700的错位和装载错误。
识别标记703是足够大的以被检测器728检测到,但又是足够小的使得当清洁垫700滑出垫保持器720时,识别标记算法750指示垫识别错误已经发生。如果例如5%、10%、15%、20%、25%的清洁垫700已滑出垫保持器720,识别标记算法750可以指示一个错误。在这样的情况下,识别标记 703的尺寸可以对应于清洁垫700长度的一定百分比(例如,识别标记703 的直径可以是清洁垫700长度的1%至10%)。虽然识别标志703已经在有限程度上被描述和示出,在一些情况下,识别标记可以简单地是卡片衬垫的颜色。卡片衬垫可以全部具有均匀的颜色,不同颜色卡片衬垫的光谱响应可被存储在颜色索引中。在一些情况下,识别标记703不是圆形形状,而是正方形、矩形、三角形形状或者是可以是能够用光学方法检测的其它形状。
虽然用于创建识别标记703的墨已被简单地描述为彩色油墨,在一些示例中,彩色油墨包括控制器可用来唯一地识别所述油墨和由此的清洁垫的其它成分。例如,油墨可以包含在特定类型的辐射下荧光的荧光标记物,而荧光标记物可进一步用于标记所述垫的类型。油墨也可以包含在反射辐射中产生检测器可以检测的独特相移的标记物。在这个示例中,控制器可以将识别标记算法750用作识别程序和验证程序两者,其中,控制器可使用识别标记 703指示清洁垫的类型,并随后通过使用荧光或相移标记物验证清洁垫的类型。
在另一实施方式中,相同类型的彩色油墨被用于不同类型的清洁垫。油墨的量取决于清洁垫的类型,光检测器可以检测反射辐射的强度以确定清洁垫的类型。
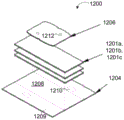
虽然图7A的卡片衬垫706被描述为包括单色的识别标记703,但在一些实施方式中,识别标记可直接置于清洁垫的包覆层上。如图12所示,其为清洁垫1200的分解图,该清洁垫1200包括吸收层1201a、1201b、1201c,包覆层1204,以及卡片衬垫1206。
如本文所述,包覆层1204为无纺布多孔材料的片状结构,其包括内表面1208和与内表面1208相反的外表面1209。吸收层1201a、1201b。1201c,包覆层1204,以及卡片衬垫1206的材料特征可分别与参照图2B描述的吸收层201a、201b、201c,包覆层204,以及卡片衬垫206的特征相似。在机器人保持清洁垫1200的清洁操作过程中,外表面1209与地面接触。从图12 中可见,当清洁垫1200被组装时,包覆层1204的内表面1208朝向吸收层 1201a、1201b、1201c。在清洁操作过程中内表面1208并不与地面接触。包覆层1204的外表面1209,图12中不可见,当清洁垫1200被组装时背向吸收层1201a、1201b、1201c。包覆层1204的外表面1209用作垫主体的外表面,其覆盖了垫主体的内部组件,例如吸收层1201a、1201b、1201c。在一些实施方式中,外表面1209接触了地面上的清洁液后,所述清洁液被从外表面1209吸收,穿过包覆层1204到内表面1208,之后进入朝向内表面1208 的吸收层1201a、1201b、1201c。
所述包覆层1204包括外表面1209上的标记,其在包覆层1204上形成单色的识别标记1210。所述识别标记1210直接形成于包覆层1204上。该识别标记1210为,例如,被包覆层1204吸收的油墨且处于包覆层1204的一部分上,从而该识别标记1210形成一个几何形状,例如矩形或圆形。卡片衬垫1206包括切口1212,从而包覆层1204的一部分上的该识别标记1210 几乎占据了包覆层1204穿过切口1212可见部分的全部(例如,大于包覆层 1204穿过切口1212可见部分的85%、90%、95%、99%等)。
位于包覆层1204上、卡片衬垫1206下的所述识别标记1210为,在一些情况下,由彩色油墨形成(例如,在清洁垫1300和清洁垫1300的包覆层的制造过程中)。所述彩色油墨为,例如,机器人的控制器用来唯一地识别清洁垫的不同类型的几种颜色中的一种。在一些实施方式中,识别标记1210 是不会在清洁垫1200的使用过程中穿过包覆层1204和吸收层1201a、1201b、 1201c浸染的油墨,例如,当清洁垫1200通过包覆层1204和吸收层1201a、1201b、1201c吸湿时。
卡片衬垫1206被制造为包括切口1212。该切口1212通过,例如,卡片衬垫1206的一部分在制造过程中被切掉或冲压掉而限定。其结果是,相比于其卡片衬垫706包括油墨以形成识别标记703的清洁垫700,卡片衬垫1206 不包括油墨或其他彩色标记来形成识别标记。而是,卡片衬垫1206包括切口1212以使识别标记1210的一部分透过卡片衬垫1206可见,从而使机器人的垫传感器(例如,垫传感器组件724)能够透过卡片衬垫1206检测到识别标记1210的该部分。
如图13所示,清洁垫1300——例如,使用与参照图12描述的清洁垫 1200类似的组件制造——包括安装面1302,清洁面1304,以及卡片衬垫 1306。清洁垫1300的垫主体的外表面限定了安装面1302和清洁面1304。当清洁垫1300被机器人保持时,安装面1302面对机器人而清洁面1304背对机器人。在机器人于地面上导航的清洁操作过程中,清洁面1304面对地面。位于清洁垫1300的包覆层上的单色识别标记1303的一部分透过卡片衬垫 1306的切口1305可见或可光学感应。识别标记1303关于安装面1302上的清洁垫1300的纵轴和水平轴折叠对称,从而用户可在两个水平方向上将清洁垫1300插入机器人中。
在一些示例中,识别标记1303占据的面积比切口1305的面积大,以确保识别标记1303填满了切口1305。识别标记1303的面积为,例如,比切口1305的面积大0%到5%、10%到25%、或者25%到50%。在一些实施例中,标记1010占据的面积为,例如,在0.5平方厘米到2平方厘米之间、2平方厘米到6平方厘米之间、或者2平方厘米到4平方厘米之间。
在一些情况下,识别标记1303占据的面积与卡片衬垫1006的面积的比例为,例如,卡片衬垫1006面积的10%到25%或者25%到50%。在一些示例中,识别标记1303的面积与垫传感器发射窗口的面积相对应。切口的尺寸足够大,以使垫传感器能够检测到识别标记1303穿过发射窗口的反射辐射。所述识别标记1303占据的面积为,例如,所述发射窗口面积的100%到 150%,110%到125%、125%到150%、150%到200%、或者200%到250%。在一些示例中,切口为圆形的,且直径为大约3mm到5mm、5mm到10mm、或者10mm到20mm。在一些实施方式中,切口为椭圆形,矩形,正方形,或者其他适于提供足够的面积以使机器人的光学传感器能够检测识别标记 1303的形状。
再次参照图7B和7C,用来检测识别标记703的机器人的垫传感器组件 724可类似地用来检测图13的识别标记1303。切口1305的尺寸足够大以使光电检测器728能够检测到识别标记1303透过卡片衬垫1306(例如,切口 1305具有大约5mm到50mm的直径)可视的部分反射辐射。当清洁垫1300 插入垫保持器720时,切口1305和识别标记1303处于垫传感器组件724之下,从而发射器730发射的辐射穿过发射窗口733,照射识别标记1303透过切口1305可视的部分。辐射从识别标记1303穿过检测器窗口734反射至检测器728。在用户将清洁垫1300插入垫保持器720后,机器人的控制器使用例如识别标记处理器750检测并处理由识别标记1303(例如,识别标记1303 的光谱响应)提供的信息来确定插入到垫保持器720的垫的类型。基于识别标记1303的颜色,控制器能确定清洁垫的类型并据此调整清洁和导航操作,如本文所述。
其它识别方案
图8A-8F示出了有不同可检测属性的其它清洁垫,所述可检测属性可以被用于允许机器人的控制器识别存放到垫保持器的清洁垫类型。参考图8A,清洁垫800A的安装面802A包括射频识别(RFID)芯片803A。射频识别芯片唯一地区分所使用的清洁垫800A的类型。机器人的垫保持器将包括有短的接收范围(例如,小于10cm)的RFID读取器。RFID读取器可以被定位在所述垫保持器上,使得当清洁垫800A被正确装载到垫保持器上时,所述 RFID读取器位于上述RFID芯片803A之上。
参考图8B,清洁垫800B的卡片衬垫802B包含条形码803B以区分所使用的清洁垫800A的类型。机器人的垫保持器将包括条形码扫描器,其扫描条形码803B以确定存放在垫保持器上的清洁垫800A的类型。
参考图8C,清洁垫800C的卡片衬垫802C包括区分所使用的清洁垫800 的类型的缩微印制标记符803C。机器人的垫保持器将包括光学鼠标传感器,其拍摄缩微印制标记符803C的图像,并且确定缩微印制标记符803C的唯一地区别清洁垫800C的特性。例如,控制器可使用该图像测量缩微印制标记符803C的特征的取向角度804C(例如,公司商标或其它的重复图像)。控制器基于图像取向的检测而选择垫的类型。
参考图8D,清洁垫800D的卡片衬垫802D包括机械翅片803D以区分所使用的清洁垫800C的类型。机械翅片803D可以由可折叠材料制成,使得它们能够抵靠所述安装面802D而被压扁。如图8D的A-A视图所示,机械翅片803D以其未折叠状态从安装面802D突出。机器人的垫保持器可以包括多个断束传感器。机械断束传感器(mechanical break beamsensors)的组合可被翅片触发,以对机器人的控制器指示一种特定类型的清洁垫800D 已经装载到机器人上。断束传感器中的一个可与图8D所示的机械翅片803D 交互。基于已经被触发的传感器的组合,控制器可以确定垫的类型。可选地,控制器可以从触发传感器的图案确定机械翅片803D之间对特定垫类型所特有的距离。通过使用翅片之间的距离或其它特征,与这样的特征的精确位置相反,所述识别方案可耐受轻微的错位误差。
参考图8E,清洁垫800E的卡片衬垫802E包括切口803E。机器人的垫保持器可包括在切口803E的区域中保持未致动的机械开关。其结果是,所述切口803E的位置和尺寸可以唯一地确定存放到垫保持器的清洁垫800E的类型。例如,基于被致动开关的组合,控制器可以计算切口803E之间的距离,然后控制器可以使用该距离确定垫的类型。
参考图8F,清洁垫800F的卡片衬垫802F包括导电区域803F。机器人的垫保持器可以包括对应的电导率传感器,其接触清洁垫800F的安装面 802F。一旦接触所述导电区域803F,电导率传感器检测到导电率的改变,因为导电区域803F具有比安装面802F更高的导电率。控制器可以使用导电性上的变化确定清洁垫800F的类型。
使用方法
机器人100(图1A中示出)可以实施控制系统500和垫识别系统534 (示于图5中),并使用所述垫标记符(例如,图6A的识别序列603、图7A 的识别标记703、图8A的RFID芯片803A、图8B的条形码803B、图8C 的缩微印制标记符803C,图8D的机械翅片803D、图8E的切口803E,和图8F的导电区域803F)智能地执行基于装载到垫保持器300(示于图3A-3D 中,并且可选地描述为垫保持器620、720)上的清洁垫120(示于图2A中,并且可选地描述为清洁垫600、700、800A-800F)类型的特定行为。下面的方法和过程描述了使用具有垫识别系统的机器人100的一个例子。
参考图9,流程图900描述了机器人100的一种使用情况,以及它的控制系统500和垫识别系统534。流程图900包括对应于用户启动或执行的步骤的用户步骤910,和对应于机器人启动或执行的步骤的机器人步骤920。
在步骤910a中,用户将电池插入机器人内。电池例如对机器人100的控制系统提供电源。
在步骤910b中,用户将清洁垫装载到垫保持器内。用户可以通过将清洁垫滑入垫保持器使得清洁垫与垫保持器的突起接合而装载清洁垫。用户可以插入任何类型的清洁垫,例如,如上所述的湿擦清洁垫、潮擦清洁垫、干尘清洁垫或可洗清洁垫。
在步骤910c中,如果适用的话,用户将清洁液充满机器人。如果用户插入干尘清洁垫,则用户不需要将清洁液充满机器人。在一些示例中,机器人可以在步骤910B之后立即识别该清洁垫。然后,机器人可以向用户指示用户是否需要将清洁液充满贮存器。
在步骤910d中,用户在开始位置开启机器人100。例如,用户可以按压清洁按钮140(图1A中示出)一次或两次以开启机器人。用户还可以将机器人物理地移动到开始位置。在某些情况下,用户按压清洁按钮一次打开机器人,然后二次按压清洁按钮以开始清洁操作。
在步骤920a中,机器人识别清洁垫的类型。机器人控制器可以执行例如关于图6A-D、图7A-D和图8A-F所描述的垫识别方案中的一个。
在步骤920b,一旦识别了所述清洁垫的类型,机器人执行基于清洁垫类型的清洁操作。机器人可以执行如上所述的导航行为和喷洒计划。例如,在关于图4E描述的实施例中,机器人执行对应于表2和表3的喷洒计划,并执行关于这些表所描述的导航行为。
在步骤920c和920d中,机器人会定期检查清洁垫是否存在错误。在机器人继续进行作为步骤920b的一部分的清洁操作的同时,机器人检查错误的清洁垫。如果机器人不确定已经发生了错误,则机器人继续清洁操作。如果机器人确定已经发生了错误,则机器人例如可以停止清洁操作,改变在机器人顶部的视觉指示器的颜色,产生听觉警报,或某些指示错误已经发生的组合。在机器人执行清洁操作时,机器人可以通过不断地检查清洁垫的类型而检测错误。在一些情况下,作为上述步骤920B的一部分,机器人可以通过将其当前识别的清洁垫类型与初始识别的清洁垫类型进行比较而检测错误。如果当前识别不同于初始识别,机器人可确定已发生了错误。如前所述,该清洁垫可以滑离所述垫保持器,这可能导致错误的检出。
在步骤920e中,在完成清洁操作时,机器人返回到步骤910d的开始位置并关闭电源。在检测到所述机器人已返回到其开始位置时,机器人的控制器可以从机器人的控制系统切断电源。
在步骤910e中,用户从所述垫保持器弹出清洁垫。用户可以致动上面关于图3A-3C描述的垫释放机构322。用户可直接地将清洁垫弹出到垃圾桶而不接触清洁垫。
在步骤910f中,如果适用,用户从机器人清空剩余的清洁液。
在步骤910g中,用户从机器人取出电池。然后,用户可以使用外部电源对电池进行充电。用户可贮存该机器人以供将来使用。
关于流程图900描述的以上步骤不限制机器人使用方法的范围。在一个示例中,机器人可以对用户提供基于机器人已检测的清洁垫类型的视觉或听觉指示。如果机器人检测用于特定类型的表面的清洁垫,机器人可以温和地提醒用户该表面类型的推荐表面类型。该机器人还可以提醒用户需要对贮存器填充清洁液。在一些情况下,机器人可以通知用户应放置在贮存器中的清洁液类型(例如,水、洗涤剂等等)。
在其它实施方式中,一旦识别了所述清洁垫的类型,机器人可以使用机器人的其它传感器以确定机器人是否已被放置在使用所识别清洁垫的正确操作条件下。例如,如果机器人检测到机器人已被放置在地毯上,机器人可能不启动清洁操作,以防止对地毯的损伤。
尽管许多例子已经被描述用于说明的目的,前面的描述不旨在限制本发明由所附权利要求的范围限定的范围。在以下权利要求书的范围内现在有并且将会有其它的示例和修正。
Claims (26)
1.一种自主地板清洁机器人,包括:
垫保持器,配置成保持可拆卸的清洁垫;
驱动器系统,在被垫保持器保持的清洁垫清洁地面时操纵所述机器人越过地面;
垫传感器,配置用于感应在所述清洁垫上可见的识别图案并且根据所述识别图案所指示的清洁垫的类型产生一信号;以及
控制器,配置用于根据所述信号从多个清洁模式中选择一种清洁模式,以及根据所选择的清洁模式控制所述机器人。
2.如权利要求1所述的机器人,其中用于感应识别图案的垫传感器的配置包括用于感应清洁垫上的标记的至少一部分的配置。
3.如权利要求2所述的机器人,其中用于感应识别图案的垫传感器的配置包括用于感应标记的一部分和用于感应清洁垫的安装板的未标记部分的配置。
4.如权利要求2所述的机器人,其中所述标记位于清洁垫的垫主体上,并且识别图案至少部分地通过清洁垫的安装板上的切口限定。
5.如权利要求4所述的机器人,其中用于感应识别图案的垫传感器的配置包括用于仅感应在垫主体上通过切口可见的一部分标记的配置。
6.如权利要求5所述的机器人,其中所述标记在垫主体上占据的面积延伸超过识别图案的识别元件的外周,其中用于感应识别图案的垫传感器的配置包括用于感应识别图案的每个识别元件的配置。
7.如权利要求6所述的机器人,其中用于产生信号的垫传感器的配置包括用于根据通过垫传感器所感应的识别图案的识别元件的状态产生信号,所述识别元件的状态至少部分地通过识别元件的光学特性限定。
8.如权利要求1所述的机器人,其中垫传感器配置为独立地感应识别图案的第一区域的反射率和识别图案的第二区域的反射率。
9.如权利要求8所述的机器人,其中第一区域的反射率通过清洁垫的安装板的反射率限定,第二区域的反射率通过至少局部地限定识别图案的标记的反射率限定。
10.如权利要求1所述的机器人,其中每个清洁模式限定不同的相应喷洒计划和导航行为。
11.一种可安装在自主地板清洁机器人上的清洁垫,该清洁垫包括:
垫主体,具有配置成在机器人移动越过地面时清洁地面的清洁表面,其中清洁垫安装到机器人上;
清洁垫上可见的识别图案,识别图案指示多种类型的清洁垫中清洁垫的类型;以及
安装板,固定在垫主体上,该安装板使得机器人的垫传感器检测识别图案,其中清洁垫安装到机器人。
12.如权利要求11所述的清洁垫,其中识别图案至少部分地通过安装板的未标记部分限定。
13.如权利要求11所述的清洁垫,其中识别图案至少部分地通过清洁垫上可见的标记限定。
14.如权利要求13所述的清洁垫,其中标记位于垫主体上,并且识别图案至少部分地通过安装板上的切口限定。
15.如权利要求14所述的清洁垫,其中切口大致上是矩形的。
16.如权利要求14所述的清洁垫,其中垫主体上仅一部分标记通过切口可见。
17.如权利要求14所述的清洁垫,其中所述标记在垫主体上占据的面积延伸超过识别图案的识别元件的外周,识别图案的每个识别元件可通过机器人的垫传感器检测到。
18.如权利要求17所述的清洁垫,其中识别图案的识别元件的状态指示清洁垫的类型,所述状态至少部分地通过识别元件的光学特性限定。
19.如权利要求17所述的清洁垫,其中所述标记的面积在0.5到4平方厘米范围内。
20.如权利要求17所述的清洁垫,其中所述标记的面积是安装板的面积的10%到50%范围内。
21.如权利要求11所述的清洁垫,其中所述识别图案为第一识别图案,并且所述清洁垫还包括指示该清洁垫的类型的第二识别图案,所述第一和第二识别图案关于所述安装板的纵向中心轴线和所述安装板的横向中心轴线对称布置。
22.一种自主地板清洁机器人,包括:
垫保持器,配置成保持可拆卸的清洁垫;
驱动器系统,在被垫保持器保持的清洁垫清洁地面时操纵所述机器人越过地面;
垫传感器,配置用于感应在所述清洁垫上可见的一部分标记并且响应于感应至少一部分标记产生一信号,所述信号指示清洁垫的类型;以及
控制器,配置用于根据所述信号从多个清洁模式中选择一种清洁模式,以及根据所选择的清洁模式控制所述机器人。
23.如权利要求22所述的机器人,其中标记的直径在5mm到50mm范围内。
24.如权利要求22所述的机器人,其中标记设置在清洁垫的垫主体上。
25.如权利要求24所述的机器人,其中在清洁垫上可见的一部分标记至少部分地通过清洁垫的安装板上的切口限定,所述一部分标记通过所述切口可见。
26.如权利要求25所述的机器人,其中在垫主体上的标记所占据的面积延伸超出所述切口的周界。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/828,285 | 2015-08-17 | ||
| US14/828,285 US9265396B1 (en) | 2015-03-16 | 2015-08-17 | Autonomous floor cleaning with removable pad |
| US14/936,236 US9320409B1 (en) | 2015-03-16 | 2015-11-09 | Autonomous floor cleaning with removable pad |
| US14/936,236 | 2015-11-09 | ||
| CN201610933579.6A CN106805851B (zh) | 2015-08-17 | 2016-08-17 | 带有可拆卸垫的自主地板清洁 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201610933579.6A Division CN106805851B (zh) | 2015-08-17 | 2016-08-17 | 带有可拆卸垫的自主地板清洁 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110279351A CN110279351A (zh) | 2019-09-27 |
| CN110279351B true CN110279351B (zh) | 2021-06-01 |
Family
ID=58205917
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910553127.9A Active CN110279351B (zh) | 2015-08-17 | 2016-08-17 | 带有可拆卸垫的自主地板清洁 |
| CN201811213684.8A Active CN109512339B (zh) | 2015-08-17 | 2016-08-17 | 带有可拆卸垫的自主地板清洁 |
| CN201610933579.6A Active CN106805851B (zh) | 2015-08-17 | 2016-08-17 | 带有可拆卸垫的自主地板清洁 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201811213684.8A Active CN109512339B (zh) | 2015-08-17 | 2016-08-17 | 带有可拆卸垫的自主地板清洁 |
| CN201610933579.6A Active CN106805851B (zh) | 2015-08-17 | 2016-08-17 | 带有可拆卸垫的自主地板清洁 |
Country Status (2)
| Country | Link |
|---|---|
| JP (5) | JP6633474B2 (zh) |
| CN (3) | CN110279351B (zh) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9907449B2 (en) | 2015-03-16 | 2018-03-06 | Irobot Corporation | Autonomous floor cleaning with a removable pad |
| US9265396B1 (en) | 2015-03-16 | 2016-02-23 | Irobot Corporation | Autonomous floor cleaning with removable pad |
| JP6633474B2 (ja) * | 2015-08-17 | 2020-01-22 | アイロボット・コーポレーション | 着脱可能パッドを用いた自律床清掃 |
| US10595698B2 (en) | 2017-06-02 | 2020-03-24 | Irobot Corporation | Cleaning pad for cleaning robot |
| WO2020020169A1 (zh) * | 2018-07-23 | 2020-01-30 | 深圳市帝迈生物技术有限公司 | 样本分析装置及其清洗方法 |
| CN109363571A (zh) * | 2018-10-27 | 2019-02-22 | 珊口(深圳)智能科技有限公司 | 清洁机器人及其拖地组件 |
| WO2020125489A1 (zh) * | 2018-12-21 | 2020-06-25 | 苏州宝时得电动工具有限公司 | 清洁机器人及其控制方法和地面处理系统 |
| JP7324847B2 (ja) * | 2018-12-21 | 2023-08-10 | ポジテック パワー ツールズ(スーチョウ)カンパニー,リミティド | 掃除ロボット及び掃除方法 |
| CN112137526B (zh) * | 2019-06-11 | 2022-04-19 | 杭州萤石软件有限公司 | 一种清洁装置的过程控制方法、控制装置、以及清洁装置 |
| CN110522362A (zh) * | 2019-08-19 | 2019-12-03 | 珠海市一微半导体有限公司 | 一种机器人仿人工拖地方法和芯片及智能拖地机 |
| CN110507260A (zh) * | 2019-08-19 | 2019-11-29 | 珠海市一微半导体有限公司 | 一种机器人拖地的控制方法和主控芯片及拖地机器人 |
| KR20210025456A (ko) * | 2019-08-27 | 2021-03-09 | 엘지전자 주식회사 | 인공지능 로봇청소기 및 그를 포함하는 로봇 시스템 |
| CN110897556B (zh) * | 2019-11-29 | 2021-05-28 | 深圳市银星智能科技股份有限公司 | 清洁机器人 |
| CN110934545B (zh) | 2019-11-29 | 2022-05-03 | 深圳市银星智能科技股份有限公司 | 清洁机器人 |
| CN113729563B (zh) * | 2020-05-29 | 2023-12-05 | 云米互联科技(广东)有限公司 | 扫地机器人 |
| CN114376457B (zh) * | 2020-10-19 | 2023-11-03 | 深圳乐动机器人股份有限公司 | 拖地机器人及其控制方法、装置及计算机可读存储介质 |
| WO2022111442A1 (zh) * | 2020-11-30 | 2022-06-02 | 追觅创新科技(苏州)有限公司 | 自清洁设备及清洁组件检测方法 |
| CN112493948B (zh) * | 2020-11-30 | 2024-04-12 | 追觅创新科技(苏州)有限公司 | 自清洁设备及清洁组件检测方法 |
| CN114747989A (zh) * | 2021-01-11 | 2022-07-15 | 宁波方太厨具有限公司 | 一种地面清洁系统的清洁策略控制方法 |
| CN115413958A (zh) * | 2021-07-08 | 2022-12-02 | 上海高仙自动化科技发展有限公司 | 一种石材护理机器人的脱困方法 |
| EP4173539A1 (de) * | 2021-10-29 | 2023-05-03 | Vorwerk & Co. Interholding GmbH | Vorsatzgerät für ein reinigungsgerät mit feuchteerkennung und verfahren zur feuchteerkennung |
| CN114904822B (zh) * | 2022-03-31 | 2023-09-26 | 上海果纳半导体技术有限公司 | 机械手清洗装置、清洗方法及半导体设备 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102984984A (zh) * | 2010-07-26 | 2013-03-20 | 阿尔弗雷德·凯驰两合公司 | 清洁设备 |
| CN103167821A (zh) * | 2010-10-12 | 2013-06-19 | 阿尔弗雷德·凯驰两合公司 | 用于运行清洁设备的方法和执行该方法的清洁设备 |
| CN106805851B (zh) * | 2015-08-17 | 2019-07-19 | 美国iRobot公司 | 带有可拆卸垫的自主地板清洁 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050209736A1 (en) * | 2002-11-13 | 2005-09-22 | Figla Co., Ltd. | Self-propelled working robot |
| JP2004237075A (ja) * | 2003-02-06 | 2004-08-26 | Samsung Kwangju Electronics Co Ltd | 外部充電装置を有するロボット掃除機システム及びロボット掃除機の外部充電装置の接続方法。 |
| JP4368660B2 (ja) * | 2003-11-07 | 2009-11-18 | アマノ株式会社 | 床面艶出機用パッド |
| JP2005345328A (ja) * | 2004-06-04 | 2005-12-15 | Sharp Corp | 光学式物体識別装置 |
| WO2006068444A1 (en) * | 2004-12-23 | 2006-06-29 | Seoul National University Industry Foundation | Fabrication of mesoporous metal electrodes in non-liquid-crystalline phase and its application |
| KR101340841B1 (ko) * | 2005-02-18 | 2013-12-11 | 아이로보트 코퍼레이션 | 습식 및 건식 청소를 위한 자동 표면 청소 로봇 |
| DE102005041133B3 (de) * | 2005-08-30 | 2007-01-18 | Miele & Cie. Kg | Verfahren zum Betreiben eines Staubsaugers |
| EP2544065B1 (en) * | 2005-12-02 | 2017-02-08 | iRobot Corporation | Robot system |
| KR101543490B1 (ko) * | 2008-04-24 | 2015-08-10 | 아이로보트 코퍼레이션 | 로봇 가능화 모바일 제품을 위한 위치 측정 시스템, 위치 결정 시스템 및 운전 시스템의 적용 |
| US8892251B1 (en) * | 2010-01-06 | 2014-11-18 | Irobot Corporation | System and method for autonomous mopping of a floor surface |
| US9044852B2 (en) * | 2010-10-26 | 2015-06-02 | Procter & Gamble | Cleaning device having onboard replaceable cleaning pad and onboard replaceable cleaning solution |
| US9615714B2 (en) * | 2012-11-09 | 2017-04-11 | Samsung Electronics Co., Ltd. | Autonomous cleaning device |
| EP3968621A3 (de) * | 2012-12-05 | 2022-03-23 | Vorwerk & Co. Interholding GmbH | Verfahrbares bodenreinigungsgerät sowie verfahren zum betreiben eines solchen gerätes |
| US20140245556A1 (en) * | 2013-03-01 | 2014-09-04 | Euro-Pro Operating Llc | Cleaning pad arrangement |
| CN108514386A (zh) * | 2013-11-12 | 2018-09-11 | 美国iRobot公司 | 清洁垫 |
-
2016
- 2016-08-16 JP JP2016159606A patent/JP6633474B2/ja active Active
- 2016-08-17 CN CN201910553127.9A patent/CN110279351B/zh active Active
- 2016-08-17 CN CN201811213684.8A patent/CN109512339B/zh active Active
- 2016-08-17 CN CN201610933579.6A patent/CN106805851B/zh active Active
-
2019
- 2019-12-12 JP JP2019224612A patent/JP6686224B2/ja active Active
-
2020
- 2020-04-01 JP JP2020065957A patent/JP6820445B2/ja active Active
- 2020-12-25 JP JP2020216739A patent/JP6961783B2/ja active Active
-
2021
- 2021-10-12 JP JP2021167340A patent/JP7024135B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102984984A (zh) * | 2010-07-26 | 2013-03-20 | 阿尔弗雷德·凯驰两合公司 | 清洁设备 |
| CN103167821A (zh) * | 2010-10-12 | 2013-06-19 | 阿尔弗雷德·凯驰两合公司 | 用于运行清洁设备的方法和执行该方法的清洁设备 |
| CN106805851B (zh) * | 2015-08-17 | 2019-07-19 | 美国iRobot公司 | 带有可拆卸垫的自主地板清洁 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020108821A (ja) | 2020-07-16 |
| CN110279351A (zh) | 2019-09-27 |
| JP2022009034A (ja) | 2022-01-14 |
| CN109512339B (zh) | 2021-05-18 |
| JP2017038926A (ja) | 2017-02-23 |
| JP7024135B2 (ja) | 2022-02-22 |
| CN106805851A (zh) | 2017-06-09 |
| CN109512339A (zh) | 2019-03-26 |
| CN106805851B (zh) | 2019-07-19 |
| JP2021058665A (ja) | 2021-04-15 |
| JP6820445B2 (ja) | 2021-01-27 |
| JP6961783B2 (ja) | 2021-11-05 |
| JP6633474B2 (ja) | 2020-01-22 |
| JP6686224B2 (ja) | 2020-04-22 |
| JP2020037023A (ja) | 2020-03-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110279351B (zh) | 带有可拆卸垫的自主地板清洁 | |
| AU2020244516B2 (en) | Autonomous floor cleaning with a removable pad | |
| AU2020294329B2 (en) | Autonomous floor cleaning with removable pad |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |