CN110168905B - 变换器驱动装置及使用该装置的电动车辆系统 - Google Patents
变换器驱动装置及使用该装置的电动车辆系统 Download PDFInfo
- Publication number
- CN110168905B CN110168905B CN201780078451.9A CN201780078451A CN110168905B CN 110168905 B CN110168905 B CN 110168905B CN 201780078451 A CN201780078451 A CN 201780078451A CN 110168905 B CN110168905 B CN 110168905B
- Authority
- CN
- China
- Prior art keywords
- voltage
- motor
- frequency
- carrier signal
- power converter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000006243 chemical reaction Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 10
- 238000012545 processing Methods 0.000 description 6
- 238000001514 detection method Methods 0.000 description 5
- 238000005259 measurement Methods 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 239000003990 capacitor Substances 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 238000009499 grossing Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000005284 excitation Effects 0.000 description 2
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 2
- 239000002847 sound insulator Substances 0.000 description 2
- 239000007858 starting material Substances 0.000 description 2
- 230000001629 suppression Effects 0.000 description 2
- 238000004804 winding Methods 0.000 description 2
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000001172 regenerating effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
Images














Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of ac power input into dc power output; Conversion of dc power input into ac power output
- H02M7/42—Conversion of dc power input into ac power output without possibility of reversal
- H02M7/44—Conversion of dc power input into ac power output without possibility of reversal by static converters
- H02M7/48—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M7/53—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal
- H02M7/537—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters
- H02M7/539—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters with automatic control of output wave form or frequency
- H02M7/5395—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters with automatic control of output wave form or frequency by pulse-width modulation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of ac power input into dc power output; Conversion of dc power input into ac power output
- H02M7/42—Conversion of dc power input into ac power output without possibility of reversal
- H02M7/44—Conversion of dc power input into ac power output without possibility of reversal by static converters
- H02M7/48—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of ac power input into dc power output; Conversion of dc power input into ac power output
- H02M7/42—Conversion of dc power input into ac power output without possibility of reversal
- H02M7/44—Conversion of dc power input into ac power output without possibility of reversal by static converters
- H02M7/48—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M7/53—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal
- H02M7/537—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/40—Regulating or controlling the amount of current drawn or delivered by the motor for controlling the mechanical load
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/08—Arrangements for controlling the speed or torque of a single motor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M1/00—Details of apparatus for conversion
- H02M1/0003—Details of control, feedback or regulation circuits
- H02M1/0012—Control circuits using digital or numerical techniques
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Inverter Devices (AREA)
- Control Of Ac Motors In General (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
本发明的问题是在减轻微机的运算负载的同时,降低电磁噪声。本发明的变换器驱动装置在对通过基于载波信号的PWM脉冲信号驱动多相马达的电力变换器进行控制的马达控制装置中,基于车速信息切换如下3个控制模式:第1控制模式,其仅在所述载波信号的波峰侧或波谷侧对去往所述电力变换器的指令电压信号进行更新;第2控制模式,其在所述载波信号的波峰侧及波谷侧的双方对去往所述电力变换器的指令电压信号进行更新;以及第3控制模式,其在所述载波信号的波峰波谷波峰或波谷波峰波谷之中对去往所述电力变换器的指令电压信号仅进行1次更新。
Description
技术领域
本发明涉及变换器驱动装置,特别涉及用于电动车辆系统的变换器驱动装置。
背景技术
控制PWM(脉冲宽度调制)来驱动马达的变换器驱动装置从直流电源转换为任意频率的交流电压,从而实现可变速驱动。
由于PWM控制将正弦波状的调制信号与锯齿波、三角波等载波信号进行比较,来产生脉冲电压,因此会产生由电磁激振力引起的噪声(以下,简称为电磁噪声),该电磁激振力由于载波信号的频率而产生。
尤其是,当电磁激振力的频率f与机构的固有振动频率fm一致时,会发生谐振从而产生大的电磁噪声。在专利文献1中,记载有如下技术:为了降低由谐振引起的电磁噪声,使载波信号的频率fc与机构的固有振动频率fm一致。
现有技术文献
专利文献
专利文献1:日本专利特开2011-172303号公报
发明内容
发明要解决的问题
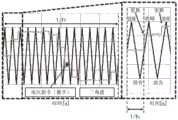
在专利文献1中,通过将正弦波状的调制信号的更新时机设为三角波的载波信号的"波峰"和"波谷"这两次,以使载波信号的频率fc的电磁噪声不会产生(参照图1)。
然而,当将电压更新时机设为"波峰"和"波谷"(以下,简称为波峰波谷更新)时,需要以载波信号的频率的2倍2fc更新施加于变换器的三相电压,从而微机的处理负载增大。
在使用该波峰波谷更新的情况下,必须提高电压的更新时机的频度,因此难以提高变换器的载波信号的频率。与此相对的,当将电压更新时机仅设为"波峰"(以下,简称为波峰更新)时,以载波信号的频率fc更新施加于变换器的三相电压即可,从而微机的处理负载降低(参照图2)。另一方面,波峰更新的电压的更新时机的次数减半,因此与波峰波谷更新相比,输出电压的波形变粗,由此除了基波电压以外的高次谐波电压增大。
本发明的课题是在减轻微机的运算负载的同时,降低电磁噪声。
用于解决问题的技术手段
为了解决上述问题,本发明的变换器驱动装置在对通过基于载波信号的PWM脉冲信号驱动多相马达的电力变换器进行控制的马达控制装置中,基于车速信息切换如下3个控制模式:第1控制模式,其仅在所述载波信号的波峰侧或波谷侧对去往所述电力变换器的指令电压信号进行更新;第2控制模式,其在所述载波信号的波峰侧及波谷侧双方对去往所述电力变换器的指令电压信号进行更新;第3控制模式,其在所述载波信号的波峰波谷波峰或波谷波峰波谷之中对去往所述电力变换器的指令电压信号仅进行1次更新。
发明效果
根据本发明,能够在减轻微机的运算负载的同时,降低电磁噪声。
附图说明
图1是示出将调制信号的更新时机设为波峰波谷时的例子的图。
图2是示出将调制信号的更新时机设为波峰时的例子的图。
图3是示出具有本实施方式的变换器驱动装置的马达驱动装置的构成的框图。
图4是图3所示出的控制部1内的框图。
图5是电压指令生成部13的框图。
图6是第1实施方式中的电压更新时机生成流程。
图7是更新周期T1为3/(2fc)时的电压更新时机。
图8是更新周期T1为1/fc时的电压更新时机。
图9是更新周期T1为1/(2fc)时的电压更新时机。
图10是示出在将马达电角频率设为f1、载波信号的频率设为fc时,将f1与fc的比设为15时的由于电压的更新时机的不同而产生的电压的高次谐波分量的图表。
图11是由变换器驱动装置驱动的马达2的噪声的测定结果的图表。
图12是由马达2、变换器3产生的电磁噪声的频率的表。
图13是示出第2实施方式中的载波信号的频率与噪声的关系的图表。
图14示出本发明的第2实施方式的载波频率与电压更新时机的变化方法例。
图15是应用了本实施方式的变换器驱动装置的混合动力汽车系统的构成图。
具体实施方式
以下,使用附图对本发明的第1实施方式进行说明。
图3是示出具有本实施方式的变换器驱动装置的马达驱动装置6的构成的框图。图4是图3所示出的控制部1内的框图。
马达驱动装置6具有马达2和变换器3。
变换器3具有:变换器电路31,其对直流电流与交流电流进行相互转换;脉冲宽度调制信号输出单元32,其将PWM信号输出到变换器电路31;以及平滑电容器33,其使直流电力平滑化。
高压电池5是马达驱动装置6的直流电压源。高压电池5的直流电压VB通过变换器3的变换器电路31与脉冲宽度调制信号输出单元32转换为可变电压、可变频率的脉冲状的三相交流电压,并被施加到马达2。
马达2是通过三相交流电压的供给而旋转驱动的同步马达。在马达2上安装有旋转位置传感器4,以配合马达2的感应电压的相位来对三相交流的施加电压的相位进行控制,用旋转位置检测器41根据旋转位置传感器4的输入信号来计算旋转位置θ,并计算马达旋转速度ωr。
这里,旋转位置传感器4更优选的是由铁芯和绕组构成的旋转变压器,但即使是使用GMR传感器等磁阻元件、霍尔元件的传感器也没问题。
电流检测单元7对给马达2通电的三相交流电流即U相交流电流Iu、V相交流电流Iv、以及W相交流电流Iw进行检测。这里,示出了具备3个电流检测器的电流检测单元,但也可以将电流检测器设为2个,根据三相电流的和为零来计算出余下的1相。另外,也可以将流入变换器3中的脉冲状的直流母线电流作为被插入平滑电容器33与变换器3之间的分流电阻Rsh的两端的电压(电流检测值Idc)进行检测,并根据施加电压将直流电流再现为三相电流。
如图4所示,控制部1具有三相/dq变换电流控制部11、电流控制部12、以及电压指令生成部13,控制部1根据检测出的U相交流电流Iu、V相交流电流Iv、W相交流电流Iw、马达2的d轴电流指令Id*、以及q轴电流指令Iq*,来驱动变换器3的变换器电路31。
三相/dq变换电流控制部11根据检测出的U相交流电流Iu、V相交流电流Iv、W相交流电流Iw、以及旋转位置θ,对dq变换后的d轴电流值Id与q轴电流值Iq进行运算。在电流控制部12中,对d轴电压指令Vd*与q轴电压指令Vq*进行运算,以使d轴电流值Id和q轴电流值Iq与根据目标转矩创建的d轴电流指令Id*和q轴电流指令Iq*一致。
电压指令生成部13根据d轴电压指令Vd*、q轴电压指令Vq*、以及旋转位置θ,对UVW变换后的三相电压指令值即U相电压指令值Vu*、V相电压指令值Vv*、以及UW相电压指令值Vw*进行运算,并输出对三相电压指令值进行脉冲宽度调制后而得到的PWM脉冲(PWM)。PWM脉冲经由驱动电路,对变换器电路31的半导体开关元件进行接通/断开控制来调整输出电压。
此外,在马达驱动装置6中,对马达2的旋转速度进行控制的情况下,根据旋转位置θ的时间变化来运算马达旋转速度ωr,并以与来自上位的控制器的速度指令一致的方式来创建电压指令或电流指令。另外,在对马达输出转矩进行控制的情况下,使用d轴电流值Id、q轴电流值Iq、以及马达转矩的关系式或映射,来创建d轴电流指令Id*与q轴电流指令Iq*。
接下来,使用图5对本实施方式的电压指令生成部13进行说明。图5是电压指令生成部13的框图。电压指令生成部13由电压更新时机生成部131、dq/三相电压指令变换部132、三角波生成部133、栅极信号生成部134构成。
电压更新时机生成部131根据微机的运算负载来确定电压的更新时机。图6是第1实施方式中的电压更新时机生成流程。
在电压更新时机生成部131中,基于图6的电压更新时机生成流程,并根据微机的处理负载率,来改变更新周期T1。微机的处理负载率根据运算负载而变化。例如,举出使用提高电压利用率的矩形波控制、转矩脉动抑制控制的情况。
将载波信号的频率设为fc。在该情况下,进行电流推定运算或在dq轴电流上叠加6倍的脉动的控制,因此与通常的电流控制相比运算量增加。在这样的情况下,通过将更新周期T1从通常的电流控制所使用的1/(2fc)延长为1/(fc)或3/(2fc),从而能够确保矩形波控制、转矩脉动抑制控制所必需的运算时间。
图7至图9示出更新周期T1中的电压更新时机。在图7至图9中,在将马达电角频率设为f1、载波信号的频率设为fc时,将f1与fc的比设为15。
图7是更新周期T1为3/(2fc)时的电压更新时机。在图7中,电压的更新时机为载波信号的1周期(1/fc)的3/2倍,作为三角波的载波信号的“波峰侧·波谷侧·波峰侧”与“波谷侧·波峰侧·波谷侧”交替出现。
图8是更新周期T1为1/fc时的电压更新时机。在图8中,电压的更新时机为载波信号的1周期(1/fc)的1倍,作为三角波的载波信号的“波峰侧·波谷侧”连续出现。以下,简称为"波峰"的更新时机。
图9是更新周期T1为1/(2fc)时的电压更新时机。在图9中,电压的更新时机为载波信号的1周期(1/fc)的1/2倍,作为三角波的载波信号的“波峰侧”与“波谷侧”交替出现。以下,简称为“波峰波谷”的更新时机。
dq/三相电压变换部132根据作为电流控制部12的输出的d轴电压指令Vd*与q轴电压指令Vq*、作为旋转位置检测器41的输出的旋转位置θ、以及作为电压更新时机生成部131的输出的更新周期T1,进行固定坐标变换及二相三相变换,从而生成U相电压指令值Vu*、V相电压指令值Vv*、以及W相电压指令值Vw*。
三角波生成部133基于载波信号的频率fc,生成载波信号的频率fc的三角波。
栅极信号生成部134对作为dq/三相电压变换部132的输出的U相电压指令值Vu*、V相电压指令值Vv*、以及W相电压指令值Vw*、与作为三角波生成部133的输出的三角波进行比较,来生成脉冲状的电压。此时,使上臂的栅极信号Gup、Gvp、Gwp逻辑反转,生成下臂栅极信号Gun、Gvn、Gwn。
像这样,使用图6所示的第1实施方式中的电压更新时机生成流程来间隔剔除电压更新的时机,由此能够将dq轴电压指令运算为三相电压的指令,并降低与三角波进行比较的电压指令生成部13的微机的处理负载。
接下来,使用附图对本发明的第2实施方式进行说明。
图10是示出在将马达电角频率设为f1、载波信号的频率设为fc时,将f1与fc的比设为15时的由于图7至图9所示的电压的更新时机的不同而产生的电压的高次谐波分量的图表。
无论在哪一电压的更新时机,都会出现频率fc±2f1(图10的13次分量、17次分量)、fc±4f1(图10的11次分量、19次分量)以及2fc±f1(图10的29次分量、31次分量)。
由于该电压的高次谐波分量而产生的定子的旋转磁场与转子的磁场相互干扰,由此会产生频率fc±3f1与2fc的电磁噪声。
以实际测量的马达的电磁噪声为例对上述频率详细地进行说明。图11是由变换器驱动装置驱动的马达2的噪声的测定结果的图表。位于该变换器驱动装置中的电压更新时机生成部131的电压的更新时机T1为(1/fc)。此时,马达驱动装置6的变换器31所输出的高次谐波电压是图10的电压更新时机T1为(1/fc)时的高次谐波电压。电压更新时机T1为(1/fc)时的高次谐波电压除了会出现频率fc±2f1(图10的13次分量、17次分量)、fc±4f1(图10的11次分量、19次分量)以及2fc±f1(图10的29次分量、31次分量),还会出现fc±f1(图10的14次分量、16次分量)。
当该高次谐波电压被施加到马达时,会成为与电压相同频率的高次谐波电流。由频率fc±2f1(图10的13次分量、17次分量)、fc±4f1(图10的11次分量、19次分量)产生的定子的旋转磁场与转子的磁场会发生干扰,从而出现频率fc±3f1的电磁力。同样地,会出现频率fc±3f1、2fc的电磁力。该电磁力使马达壳体或外壳发生振动,从而成为电磁噪声。
另一方面,图10的电压更新时机T1为(1/2fc)时的高次谐波电压不会出现fc±f1(图10的14次分量、16次分量)。因此,由上述高次谐波电压产生的电磁力的频率为频率fc±3f1、2fc。另外,图10的电压更新时机T1为(3/2fc)时的高次谐波电压不会产生fc±f1(图10的14次分量、16次分量),例如会产生频率(2fc)/3±f1以及(2fc)/3±f1的高次谐波电压。因此,成为由上述高次谐波电压产生的频率(2fc)/3±2f1的电磁噪声。
当马达的转速发生变化时,马达电角频率f1也随之发生变化。根据马达的转速而变化的电磁噪声的频率fc±3f1、马达2的壳体(机构)的固有振动数fm、以及由于与马达2的电磁设计固有的转速成比例产生的电磁激振力而产生的频率发生谐振,从而变大。例如,在图11的马达2的电磁噪声的测定结果中,由于变换器3的电压高次谐波而产生的频率fc-3f1的噪声与马达结构系统的固有振动数fm一致,噪声由于谐振而变大。
接下来,对由于马达的电磁设计而产生的噪声进行叙述。由于马达的电磁设计而产生的噪声依赖于马达的转子的极数、定子的槽数、磁隙、定子的绕线方法等而产生,一般以马达的电角频率f1的N倍产生。例如,在图11的马达的测定结果中,马达2多以电角频率f1的12倍和24倍产生噪声。
在图12中示出由上述由马达2、变换器3产生的电磁噪声的频率的表。以这些频率产生的电磁力与壳体的固有振动数(fm1、fm2、fm3、…)一致,由此由于电磁力而产生的振动、噪声变大。
在本发明的第2实施方式中,改变电压指令更新时机与载波信号的频率,以使其与图11所示的实际测量的电磁噪声不同,避免谐振并使电磁噪声最小。
一般来说,当增加载波信号的频率、并且将电压指令更新时机设为波峰波谷更新时,微机的运算负载会增大。因此,在增加载波信号的频率的情况下,需要设为波峰更新。切换波峰波谷更新与波峰更新时,在设为同样的载波频率的情况下,如图13所示与壳体的固有振动数fm1和fm2一致,载波电磁噪声变大。
在图14中示出本发明的第2实施方式的载波频率与电压更新时机的变化方法例。在本发明的第2实施方式中,将载波频率设置为第1载波频率fc1与第2载波频率fc2这2者,在马达的转速较低时,设定为比壳体的固有振动数fm1和fm2低的载波频率fc2。在微机的处理负载变高,并且将电压的更新时机设为波峰更新时,将载波频率fc1设为介于壳体的固有振动数fm1与fm2之间,使其与呈放射状扩展的电磁噪声的频率fc±3f1不一致。通过这样,能够避免与壳体的谐振,并降低在马达驱动系统6中产生的电磁噪声。
另外,也可以在马达的转速较低时,将电压的更新时机设为T1,使由此产生的载波电磁噪声的频率fc2与壳体的固有振动数fm1或fm2一致,以较低的高次谐波电压产生声音。
接下来,使用图15,对将本发明的变换器驱动装置应用于车辆的其他的实施方式进行说明。
图15是应用了本实施方式的变换器驱动装置的混合动力汽车系统的构成图。如图15所示,混合动力汽车系统具有将马达2作为马达/发电机应用的动力传动系。
在图15所示的汽车中,符号700是车体。在车体700的前部可旋转地轴支承有前轮车轴701,并且在前轮车轴701的两端设置有前轮702、703。在车体700的后部可旋转地轴支承有后轮车轴704,并且在后轮车轴704的两端设置有后轮705、706。
在前轮车轴701的中央部设置有作为动力分配机构的差速齿轮711,以使从发动机710经由变速器712传递的旋转驱动力分配到左右的前轮车轴701。
在发动机710与马达2中,设置在发动机710的曲轴上的皮带轮710a与设置在马达2的旋转轴上的皮带轮720a经由皮带730机械地连接。
由此,马达2的旋转驱动力能够传递到发动机710,并且发动机710的旋转驱动力能够传递到马达2。在马达2中,由变换器3控制的三相交流电力被供给至定子的定子线圈,从而转子旋转,产生与三相交流电力相应的旋转驱动力。
也就是说,马达2被变换器3控制并作为电动机工作的同时,转子接受发动机710的旋转驱动力而旋转,从而在定子的定子线圈上感应出电动势,作为产生三相交流电力的发电机工作。
变换器3是将供给自作为高电压(42V或300V)系电源的高压电池5的直流电力转换为三相交流电力的电力转换装置,根据运转指令值,对与转子的磁极位置对应的、在马达2的定子线圈内流动的三相交流电流进行控制。
由马达2发电的三相交流电力通过变换器3转换为直流电力,从而给高压电池5充电。高压电池5经由DC-DC转换器724被电连接到低压电池723。低压电池723构成汽车的低电压(14V)系电源,被用于使发动机710初始起动(冷起动)的起动机725、收音机、灯等的电源。
当车辆处于等待信号灯等停车时(怠速停止模式),使发动机710停止,并在再次发车时重新起动发动机710(热起动)时,用变换器3驱动马达2,并重新启动发动机710。此外,在怠速停止模式中,高压电池5的充电量不足的情况、或发动机710没有充分预热的的情况下等,不停止发动机710并继续进行驱动。另外,在怠速停止模式中,需要确保空调的压缩机等的、将发动机710作为驱动源的辅机类的驱动源。在该情况下,驱动马达2以驱动辅机类。
在处于加速模式时或高负载运转模式时,也驱动马达2以辅助发动机710的驱动。相反,在处于需要高压电池5的充电的充电模式时,通过发动机710使马达2发电,从而对高压电池5进行充电。即,进行车辆的制动时、减速时等再生模式。
在使用了本实施方式的变换器驱动装置的电动车辆中,在减轻微机的运算负载的同时,降低电磁噪声,由此能够减少贴付于车体的防振材料、隔音材料、隔声材料。另外,通过减少这些材料,能够降低油耗。
在上述实施方式中,对将本实施方式的马达驱动装置6应用于混合动力汽车系统的情况进行了说明,但在电动汽车中也能得到同样的效果。
另外,在上述实施方式中,对单个变换器装置进行了说明,但只要具有该上述功能,更不用说能够应用在变换器装置与马达一体化的马达驱动系统中。
此外,本发明不限定于上述实施方式,可以在不脱离本发明的宗旨的范围内进行各种变更。
符号说明
1…控制部、2…马达、3…变换器、4…旋转位置传感器、5…高压电池、6…马达驱动装置、7…电流检测单元、11…三相/dq变换电流控制部、12…电流控制部、13…电压指令生成部、31…变换器电路、32…脉冲宽度调制信号输出单元、33…平滑电容器、41…旋转位置检测器、131…电压更新时机生成部、132…dq/三相电压指令变换部、133…三角波生成部、134…栅极信号生成部、700…车体、701…前轮车轴、702…前轮、703…前轮、704…后轮车轴、705…后轮、706…后轮、710…发动机、710a…皮带轮、711…差速齿轮、712…变速器、720a…皮带轮、723…低压电池、724…DC-DC转换器、725…起动机、730…皮带、f1…马达电角频率、fc…载波信号的频率、Gup…上臂的U相栅极信号、Gvp…上臂的V相栅极信号、Gwp…上臂的W相栅极信号、Gun…下臂的U相栅极信号、Gvn…下臂的V相栅极信号、Gwn…下臂的W相栅极信号、Id…d轴电流值、Idc…电流检测值、Id*…d轴电流指令、Iq…q轴电流值、Iq*…q轴电流指令、Iu…U相交流电流、Iv…V相交流电流、Iw…W相交流电流、T1…更新周期、Rsh…分流电阻、VB…直流电压、Vd*…d轴电压指令、Vq*…q轴电压指令、Vu*…U相电压指令值、Vv*…V相电压指令值、Vw*…W相电压指令值、θ…旋转位置、ωr…马达旋转速度。
Claims (4)
1.一种变换器驱动装置,其特征在于,
在对通过基于载波信号的PWM脉冲信号驱动多相马达的电力变换器进行控制的马达控制装置中,基于所述马达控制装置的运算负载切换如下3个控制模式:
第1控制模式,其仅在所述载波信号的波峰侧或波谷侧对去往所述电力变换器的指令电压信号进行更新;
第2控制模式,其在所述载波信号的波峰侧及波谷侧的双方对去往所述电力变换器的指令电压信号进行更新;以及
第3控制模式,其以所述载波信号的1周期的3/2倍作为电压更新周期,对去往所述电力变换器的指令电压信号进行更新。
2.根据权利要求1所述的变换器驱动装置,其特征在于,
改变所述载波信号的频率与所述3个控制模式,以使由在所述3个控制模式下产生的所述电力变换器的PWM脉冲信号所产生的电磁噪声的频率与所述多相马达的谐振频率不一致。
3.根据权利要求1所述的变换器驱动装置,其特征在于,
改变所述载波信号的频率与所述3个控制模式,以使由在所述3个控制模式下产生的所述电力变换器的PWM脉冲信号所产生的电磁噪声的频率、与由于所述多相马达的电磁激振力而产生的噪声的频率不一致。
4.一种电动车辆系统,其特征在于,具备:
权利要求1至3中的任一项所述的变换器驱动装置;以及
由该变换器驱动装置驱动控制的三相马达。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016-254647 | 2016-12-28 | ||
| JP2016254647A JP6715759B2 (ja) | 2016-12-28 | 2016-12-28 | インバータ駆動装置およびそれを用いた電動車両システム |
| PCT/JP2017/040530 WO2018123291A1 (ja) | 2016-12-28 | 2017-11-10 | インバータ駆動装置およびそれを用いた電動車両システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110168905A CN110168905A (zh) | 2019-08-23 |
| CN110168905B true CN110168905B (zh) | 2021-01-26 |
Family
ID=62707489
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201780078451.9A Active CN110168905B (zh) | 2016-12-28 | 2017-11-10 | 变换器驱动装置及使用该装置的电动车辆系统 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10873285B2 (zh) |
| EP (1) | EP3565102B1 (zh) |
| JP (1) | JP6715759B2 (zh) |
| CN (1) | CN110168905B (zh) |
| WO (1) | WO2018123291A1 (zh) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6585872B1 (ja) * | 2018-10-30 | 2019-10-02 | 東芝三菱電機産業システム株式会社 | 電力変換装置 |
| JP7475936B2 (ja) * | 2020-04-03 | 2024-04-30 | 三菱重工サーマルシステムズ株式会社 | システム、車両、放電方法及びプログラム |
| JP7322808B2 (ja) * | 2020-05-20 | 2023-08-08 | 株式会社豊田自動織機 | インバータ制御装置及び車載用流体機械 |
| CN111439132B (zh) * | 2020-06-15 | 2020-11-17 | 江苏时代新能源科技有限公司 | 永磁电机的控制方法、装置、动力系统及电动汽车 |
| US11926220B2 (en) * | 2020-11-30 | 2024-03-12 | Mercedes-Benz Group AG | Hybrid transmission for a vehicle |
| DE102020007296A1 (de) | 2020-11-30 | 2022-06-02 | Daimler Ag | Hybridgetriebe für ein Fahrzeug |
| US11912132B2 (en) | 2020-11-30 | 2024-02-27 | Mercedes-Benz Group AG | Hybrid transmission for a vehicle |
| JP2022119590A (ja) * | 2021-02-04 | 2022-08-17 | ダイハツ工業株式会社 | インバータの制御装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102906993A (zh) * | 2010-05-27 | 2013-01-30 | 丰田自动车株式会社 | 电动机的控制装置和控制方法 |
| CN103368488A (zh) * | 2012-04-06 | 2013-10-23 | 株式会社电装 | 用于多相旋转装置的控制器 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2005034327A1 (ja) | 2003-09-30 | 2005-04-14 | Mitsubishi Denki Kabushiki Kaisha | インバータ装置 |
| US7576500B2 (en) * | 2007-05-31 | 2009-08-18 | Gm Global Technology Operations, Inc. | Method and system for operating a motor to reduce noise in an electric vehicle |
| JP5320721B2 (ja) * | 2007-11-05 | 2013-10-23 | 株式会社安川電機 | Pwmインバータ装置 |
| JP5228460B2 (ja) | 2007-12-03 | 2013-07-03 | パナソニック株式会社 | モータ制御装置 |
| JP4605274B2 (ja) * | 2008-08-27 | 2011-01-05 | トヨタ自動車株式会社 | 車両 |
| JP2011172303A (ja) | 2010-02-16 | 2011-09-01 | Toyota Motor Corp | インバータの制御装置およびインバータの制御方法 |
| JP6003328B2 (ja) | 2012-07-20 | 2016-10-05 | 株式会社豊田自動織機 | 回転電機のインバータ装置、及び、回転電機の駆動方法 |
| JP6179494B2 (ja) * | 2014-09-26 | 2017-08-16 | 株式会社デンソー | 交流電動機の制御装置 |
-
2016
- 2016-12-28 JP JP2016254647A patent/JP6715759B2/ja active Active
-
2017
- 2017-11-10 CN CN201780078451.9A patent/CN110168905B/zh active Active
- 2017-11-10 EP EP17886063.1A patent/EP3565102B1/en active Active
- 2017-11-10 WO PCT/JP2017/040530 patent/WO2018123291A1/ja unknown
- 2017-11-10 US US16/468,594 patent/US10873285B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102906993A (zh) * | 2010-05-27 | 2013-01-30 | 丰田自动车株式会社 | 电动机的控制装置和控制方法 |
| CN103368488A (zh) * | 2012-04-06 | 2013-10-23 | 株式会社电装 | 用于多相旋转装置的控制器 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2018123291A1 (ja) | 2018-07-05 |
| JP2018107978A (ja) | 2018-07-05 |
| EP3565102B1 (en) | 2024-01-10 |
| CN110168905A (zh) | 2019-08-23 |
| US10873285B2 (en) | 2020-12-22 |
| EP3565102A1 (en) | 2019-11-06 |
| EP3565102A4 (en) | 2020-07-08 |
| US20190334469A1 (en) | 2019-10-31 |
| JP6715759B2 (ja) | 2020-07-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110168905B (zh) | 变换器驱动装置及使用该装置的电动车辆系统 | |
| CN110291709B (zh) | 逆变器装置以及电动车辆 | |
| CN111713012B (zh) | 马达控制装置以及使用它的电动车辆系统 | |
| CN114208021B (zh) | 电动机控制装置、机电一体单元和电动车辆系统 | |
| JP7242523B2 (ja) | インバータ制御装置、電動車両システム | |
| US12074551B2 (en) | Motor control device, electromechanical unit, electric vehicle system, and motor control method | |
| US20230223824A1 (en) | Motor control device, mechatronic unit, power generation system, boost converter system, and electric vehicle system | |
| CN112840556B (zh) | 电动机控制装置及电动车辆系统 | |
| US20230155533A1 (en) | Motor control device, electric vehicle, and motor control method | |
| US20240042867A1 (en) | Motor control device, electromechanical integrated unit, boost converter system, electric vehicle system, and motor control method | |
| WO2023053490A1 (ja) | インバータ制御装置、ハイブリッドシステム、機電一体ユニット、電動車両システム、インバータ制御方法 | |
| CN118830188A (zh) | 马达控制装置、混合动力系统、机电一体单元、电动车辆系统 | |
| CN117813758A (zh) | 逆变器控制装置、电动助力转向系统、电动车辆系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CP01 | Change in the name or title of a patent holder |
Address after: Ibaraki Patentee after: Hitachi astemo Co.,Ltd. Address before: Ibaraki Patentee before: HITACHI AUTOMOTIVE SYSTEMS, Ltd. |
|
| CP01 | Change in the name or title of a patent holder |