CN110077458B - 一种基于自抗扰控制的智能车转角控制方法 - Google Patents
一种基于自抗扰控制的智能车转角控制方法 Download PDFInfo
- Publication number
- CN110077458B CN110077458B CN201910214609.1A CN201910214609A CN110077458B CN 110077458 B CN110077458 B CN 110077458B CN 201910214609 A CN201910214609 A CN 201910214609A CN 110077458 B CN110077458 B CN 110077458B
- Authority
- CN
- China
- Prior art keywords
- steering
- control
- value
- output
- tracking
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/008—Control of feed-back to the steering input member, e.g. simulating road feel in steer-by-wire applications
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
本发明涉及一种基于自抗扰控制的智能车转角控制方法,包括以下步骤:1)建立车辆转向系统模型,并生成转向系统的动力学特征表述;2)构建转向阻力矩估计器,该转向阻力矩估计器以车辆转向系统的转角传感器获得的真实转角值和转向执行电机的输出扭矩指令值作为输入,以计算获得的转向系统中转向阻力矩的估计值和真实转角值及其微分量的估计值作为输出;3)构建转角跟踪控制器,该转角跟踪控制器以转向阻力矩估计器的输出结果和期望转角值为输入,以计算得到的输出控制量为输出,并将输出控制量指令发送到转向执行电机,实现智能车的转角跟踪控制。与现有技术相比,本发明具有降低噪声影响、适应性高等优点。
Description
技术领域
本发明涉及智能车控制领域,尤其是涉及一种基于自抗扰控制的智能车转角控制方法。
背景技术
近些年来国内外智能车技术得到了快速的发展,但是要求智能车实现SAE自动驾驶5级标准,即完全自主驾驶,还需要较长时间。目前大部分无人驾驶研究还在试验阶段,技术依然不成熟不完善,成本较高,且国内与国外技术相比还有很大的差距。智能车的运动控制系统是自动驾驶的基石,也是最重要的环节之一,其目的在于通过对车辆执行器的控制实现智能车对期望路径、轨迹的跟踪控制。而对方向盘的控制则是控制车辆的转向系统,影响车辆的横向运动。车辆转向系统是一个非线性的系统,如何设计转向控制器,以实现髙精度的横向控制,即实现髙精度的转角跟踪控制,是智能车研究所必须解决的重点问题。
传统的转向系统控制方法通常将车辆转向系统作为简单的系统,实际应用时通过PID控制、滑模变结构控制等进行实车调试应用,缺乏更丰富、更有效的控制方法,这是制约智能车发展的瓶颈之一。PID控制作为误差反馈控制是常用的控制策略,被广泛应用于工程实践中。PID控制对于线性系统的反馈控制简单直接有效,但是对于转向系统的精确转角跟踪控制有诸多缺陷,如转向系统存在非线性特性、微分项反馈易受噪声影响以及不能适用于各种工况等等。而滑模变结构控制对外来干扰和系统的内在摄动具有鲁棒性,适用于具有非线性特性的转向系统转角跟踪控制,但由于控制律的切换控制导致系统容易产生抖振。转向系统传感器存在噪声、系统包含未知建模动态、部分干扰项未知以及转向阻力矩非线性等特性的存在,使得适用于各种工况下智能车转向系统控制方法的设计存在较高难度。
因此,如何提供一种解决转角跟踪控制问题的智能车转角控制策略是本领域技术人员亟待解决的问题。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于自抗扰控制的智能车转角控制方法。
本发明的目的可以通过以下技术方案来实现:
一种基于自抗扰控制的智能车转角控制方法,包括以下步骤:
1)建立车辆转向系统模型,并生成转向系统的动力学特征表述;
2)构建转向阻力矩估计器,该转向阻力矩估计器以车辆转向系统的转角传感器获得的真实转角值和转向执行电机的输出扭矩指令值作为输入,以计算获得的转向系统中转向阻力矩的估计值和真实转角值及其微分量的估计值作为输出;
3)构建转角跟踪控制器,该转角跟踪控制器以转向阻力矩估计器的输出结果和期望转角值为输入,以计算得到的输出控制量为输出,并将输出控制量指令发送到转向执行电机,实现智能车的转角跟踪控制。
所述的车辆转向系统模型的表达式为:

其中,Jw、Bw分别为转向系统等效到转向管柱处的转动惯量和阻尼系数,δs为管柱处转向轴转角, 为车辆转向系统中与管柱处转向轴转角速度
为车辆转向系统中与管柱处转向轴转角速度 相关的摩擦力矩,Tsa为轮胎路面作用产生在转向主销处的力矩,ki为转向系统转向传动比,kr为转向执行电机处减速机构的减速比,Tm为转向执行电机的输出力矩。
相关的摩擦力矩,Tsa为轮胎路面作用产生在转向主销处的力矩,ki为转向系统转向传动比,kr为转向执行电机处减速机构的减速比,Tm为转向执行电机的输出力矩。
所述的步骤2)中,定义

则转向阻力矩估计器的表达式为:

其中,(k)、(k-1)分别表示第k时刻和第k-1时刻的值,e为估计误差,z3、z2、z1分别为对转向阻力矩相关项x3、真实转角值x1及真实转角值的微分量x2的估计值,β3、β2、β1分别为估计器增益参数,h为离散步长,fal为非线性构造函数,α3、α2、α1、δ分别为估计器调整参数,f(·)定义为对于自变量x,有f(x)=-[Bwx+Tfr(x)]/Jw,u(k-1)为第k-1时刻的系统输入。
所述的步骤3)中,转角跟踪控制器包括跟踪微分器、非线性状态误差反馈控制器和补偿控制器。
所述的跟踪微分器的表达式为:

其中,δdes为期望的转向管柱处转角,v1、v2为跟踪微分器的状态量,其分别对应转角值的过渡滤波值以及其微分项,fhan为非线性最速控制函数,h0、r0为跟踪微分器可调参数,h为离散步长。
所述的非线性状态误差反馈控制器的表达式为:

其中,ε1、ε2为状态误差,ε0为状态误差ε1的积分,u0为输出的非线性状态误差反馈控制量,c、c0、r1分别为非线性状态误差反馈控制的可调参数,h1为控制器参数。
所述的补偿控制器的表达式为:
u(k)=u0(k)-{f[z2(k)]+z3(k)}/b0
其中,b0为前馈补偿增益系数,u为经前馈补偿后的最终控制量。
与现有技术相比,本发明具有以下优点:
本发明的智能车转角跟踪控制方法从转向系统的模型入手,建立了转向阻力矩估计器,该估计器通过将真实转角信号和转向控制器最终控制量作为输入,能够对转向系统中存在的转向阻力矩进行实时估计输出,同时能够得到真实转角信号及其微分信号的估计值,通过估计器参数的调节对真实转角信号起到不同程度的滤波作用,可以降低真实转角信号中噪声对微分项的影响。设计的转角跟踪控制器能够对期望转角值进行过渡安排,防止不同期望信号对反馈控制效果的影响,同时利用非线性状态误差反馈和补偿控制能够很好地应对转向系统中部分干扰项未知以及转向阻力矩非线性等特点,提高控制方法的适用性。
附图说明
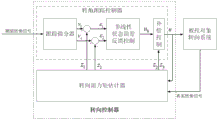
图1为本发明的控制器框图。
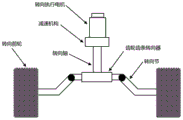
图2为智能车转向系统包括管柱式电动助力转向系统和线控转向系统的简化模型图。
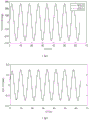
图3为转向控制算法的仿真试验结果图,其中,图(3a)为角阶跃仿真试验方向盘转角的结果图,图(3b)为角阶跃仿真试验转角跟踪误差的结果图,图(3c)为角阶跃仿真试验输出力矩的结果图,图(3d)为正弦仿真试验方向盘转角的结果图,图(3e)为正弦仿真试验输出力矩的结果图。
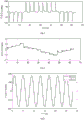
图4为转向控制算法的实车试验结果图,其中,图(4a)为角阶跃实车试验方向盘转角的结果图,图(4b)为角阶跃实车试验转角跟踪误差的结果图,图(4c)为角阶跃实车试验输出力矩的结果图,图(4d)为正弦实车试验方向盘转角的结果图,图(4e)为正弦实车试验输出力矩的结果图。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。
实施例
本发明提供一种基于转向系统模型的控制方法,包括转向阻力矩估计器和转角跟踪控制器在内的控制策略,转角跟踪控制器又包括跟踪微分器、非线性状态误差反馈控制以及补偿控制等部分,共同构成智能车转向控制器,有效地实现了适应于各工况下的智能车的转角跟踪控制。
如图1所示,本发明的智能车转角控制方法的结构图,该方法具体步骤包括:
步骤1,针对被控对象转向系统建立智能车转向系统的模型,转向系统的简化模型图如图2所示。分析转向系统的相关特征,可以生成转向系统的动力学模型方程;该方程可以用下式表示:

其中,Jw、Bw分别是转向系统等效到转向管柱处的转动惯量和阻尼系数,δs是转向系统管柱处转向轴转角, 是转向系统中与
是转向系统中与 相关的摩擦力矩,Tsa是轮胎路面作用产生在转向主销处的力矩,ki是转向系统转向传动比,kr是转向执行电机处减速机构的减速比,Tm是转向执行电机的输出力矩。
相关的摩擦力矩,Tsa是轮胎路面作用产生在转向主销处的力矩,ki是转向系统转向传动比,kr是转向执行电机处减速机构的减速比,Tm是转向执行电机的输出力矩。
步骤2,根据步骤1建立的模型方程设计转向阻力矩估计器,将车辆转向系统的转角传感器获得的真实转角值和转向执行电机的输出扭矩指令值作为输入,通过估计器计算获得转向系统中转向阻力矩的估计值和真实转角值及其微分量的估计值。
转向阻力矩估计器的具体形式为:

其中,(k)、(k-1)分别表示第k时刻和第k-1时刻的值,e是估计误差,z3、z2、z1分别是对转向阻力矩相关项x3、真实转角值x1及其微分量x2的估计值,β3、β2、β1分别是估计器增益参数,h为离散步长,fal是非线性构造函数,α3、α2、α1、δ是估计器的调整参数。非线性构造函数fal表达式为:

该函数在原点附近为线性段,而在该区间以外则为幂函数。通过调节函数中的参数α、δ则可以改变该函数对于e的映射关系。
步骤3,根据步骤2得到的估计值结果和期望转角值,通过转角跟踪控制器计算输出控制量,转向控制器将该控制量指令提供给转向执行电机,实现智能车的转角跟踪控制。
跟踪微分器的具体形式为:

其中,δdes是期望的转向管柱处转角,v1、v2是跟踪器的状态量;对应着转角值的过渡滤波值以及其微分项;r0、h0是跟踪微分器可调参数,fhan是非线性最速控制函数,其表达式为:
u=fhan(x1,x2,r,h)

观察该函数形式可知,其函数值绝对值的取值范围被限制在小于r的范围内,通过调节r、h的值,就可以改变该函数对于x1、x2的映射关系。因此,跟踪微分器中r0的取值取决于对于期望转角值的二阶微分项即期望转角加速度值的限值,而h0的取值则可以参考控制器的控制步长h进行选择。
非线性状态误差反馈控制利用了转向阻力矩估计器和跟踪微分器的输出结果,具体形式为:

其中ε1、ε2是状态误差项,ε0是对状态误差ε1的积分,u0是输出的非线性状态误差反馈控制量,c、c0、r1、h1是非线性状态误差反馈控制的可调参数。非线性状态误差反馈控制中r1的取值取决于转向执行电机的输出力矩限值,而h1的取值则决定了反馈误差项对于反馈控制量的影响。
补偿控制利用了转向阻力矩估计器和非线性状态误差反馈控制的输出结果,具体形式为:
u(k)=u0(k)-{f[z2(k)]+z3(k)}/b0
其中b0是前馈补偿增益系数,u为经补偿控制后的最终控制量。b0作为增益系数,影响了转向阻力矩估计值对于最终控制量的补偿程度。转向控制器将最终控制量输出给转向执行电机,实现智能车的转角跟踪控制。
为了验证发明所提出的智能车转角跟踪控制方法的有效性,建立了仿真实验平台,实验平台为基于Matlab/Simulink和Carsim软件联合搭建的仿真平台。通过Carsim中对转向阻力矩的计算结果与Matlab/Simulink中转向系统相应模型的结合,共同构成研究对象进行仿真验证。
图3为转向控制算法的仿真试验结果图。仿真过程车辆速度设置为20km/h左右,期望转角值分别设定为阶跃转角值和正弦转角值。阶跃转角值从0度开始,以阶跃周期为5秒、阶跃幅值为90度的转角值依次增减至正负360度。该期望值的设定覆盖了正负360度之间转角值阶跃幅度为90度的情况,为了验证控制器的稳态跟踪控制性能。正弦转角值以正弦幅度270度正弦周期4秒变化,其设定则是为了验证控制器的瞬态跟踪控制性能。从图3中可以看出转向系统的实际转角值可以很好地跟踪期望转角值指令,控制器控制效果良好,控制量稳定,控制精度高,控制响应性快,具有较好的跟踪能力。
为了进一步验证发明所提出的智能车转角跟踪控制方法的有效性,建立了实车实验平台,实验平台为某无人驾驶电动车辆,通过给转向系统的转向执行电机发送控制扭矩指令,实现转向系统的控制,进行实车试验的验证。
图4为转向控制算法的实车试验结果图。其期望转角值的设定与仿真试验类似。实车试验过程中车辆速度设置为20km/h左右,期望阶跃转角值从0度开始,以阶跃周期为4秒、阶跃幅值为90度的转角值依次增减至正负360度。期望正弦转角值以正弦幅度180度正弦周期4秒变化。从图4中可以看出转向系统的实际转角值依然可以很好地跟踪期望转角值指令,在实车试验中,控制器保持着良好的控制效果,控制量稳定,控制精度高,控制响应性快,具有较好的跟踪能力。
仿真和实车试验结果表明,所设计的智能车转角跟踪控制器能够适用于智能车并实现良好的转角跟踪性能,具有有益的工程实用价值。
以上所述,仅为本发明的优选具体实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
Claims (1)
1.一种基于自抗扰控制的智能车转角控制方法,其特征在于,包括以下步骤:
1)建立车辆转向系统模型,并生成转向系统的动力学特征表述,所述的车辆转向系统模型的表达式为:

其中,Jw、Bw分别为转向系统等效到转向管柱处的转动惯量和阻尼系数,δs为管柱处转向轴转角, 为车辆转向系统中与管柱处转向轴转角速度
为车辆转向系统中与管柱处转向轴转角速度 相关的摩擦力矩,Tsa为轮胎路面作用产生在转向主销处的力矩,ki为转向系统转向传动比,kr为转向执行电机处减速机构的减速比,Tm为转向执行电机的输出力矩;
相关的摩擦力矩,Tsa为轮胎路面作用产生在转向主销处的力矩,ki为转向系统转向传动比,kr为转向执行电机处减速机构的减速比,Tm为转向执行电机的输出力矩;
2)构建转向阻力矩估计器,该转向阻力矩估计器以车辆转向系统的转角传感器获得的真实转角值和转向执行电机的输出扭矩指令值作为输入,以计算获得的转向系统中转向阻力矩的估计值和真实转角值及其微分量的估计值作为输出,定义

则转向阻力矩估计器的表达式为:

其中,(k)、(k-1)分别表示第k时刻和第k-1时刻的值,e为估计误差,z3、z2、z1分别为对转向阻力矩相关项x3、真实转角值x1及真实转角值的微分量x2的估计值,β3、β2、β1分别为估计器增益参数,h为离散步长,fal为非线性构造函数,α3、α2、α1、δ分别为估计器调整参数,f(·)定义为对于自变量x,有f(x)=-[Bwx+Tfr(x)]/Jw,u(k-1)为第k-1时刻的系统输入;
3)构建转角跟踪控制器,该转角跟踪控制器以转向阻力矩估计器的输出结果和期望转角值为输入,以计算得到的输出控制量为输出,并将输出控制量指令发送到转向执行电机,实现智能车的转角跟踪控制,转角跟踪控制器包括跟踪微分器、非线性状态误差反馈控制器和补偿控制器,
所述的跟踪微分器的表达式为:

其中,δdes为期望的转向管柱处转角,v1、v2为跟踪微分器的状态量,其分别对应转角值的过渡滤波值以及其微分项,fhan为非线性最速控制函数,h0、r0为跟踪微分器可调参数,h为离散步长;
所述的非线性状态误差反馈控制器的表达式为:

其中,ε1、ε2为状态误差,ε0为状态误差ε1的积分,u0为输出的非线性状态误差反馈控制量,c、c0、r1分别为非线性状态误差反馈控制的可调参数,h1为控制器参数;
所述的补偿控制器的表达式为:
u(k)=u0(k)-{f[z2(k)]+z3(k)}/b0
其中,b0为前馈补偿增益系数,u为经前馈补偿后的最终控制量。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910214609.1A CN110077458B (zh) | 2019-03-20 | 2019-03-20 | 一种基于自抗扰控制的智能车转角控制方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910214609.1A CN110077458B (zh) | 2019-03-20 | 2019-03-20 | 一种基于自抗扰控制的智能车转角控制方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110077458A CN110077458A (zh) | 2019-08-02 |
| CN110077458B true CN110077458B (zh) | 2021-03-26 |
Family
ID=67413421
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910214609.1A Active CN110077458B (zh) | 2019-03-20 | 2019-03-20 | 一种基于自抗扰控制的智能车转角控制方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110077458B (zh) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110949499B (zh) * | 2019-11-26 | 2022-03-22 | 江苏大学 | 一种商用车无人驾驶转角补偿系统及其控制方法 |
| CN111114535B (zh) * | 2020-01-02 | 2021-08-17 | 联创汽车电子有限公司 | 智能驾驶车辆横向控制方法及控制系统 |
| CN111523076B (zh) * | 2020-03-24 | 2021-04-02 | 中国人民解放军军事科学院评估论证研究中心 | 基于Fal函数计算角加速度的方法、装置及系统 |
| CN112937545B (zh) * | 2021-03-18 | 2024-07-12 | 江苏大学 | 一种应对驾驶员干扰的自动驾驶汽车转向控制系统及方法 |
| CN114013499B (zh) * | 2021-10-29 | 2023-02-21 | 北京汽车研究总院有限公司 | 无人驾驶方程式赛车横向控制系统、方法及车辆 |
| CN116215655B (zh) * | 2023-03-07 | 2024-11-15 | 上海佑觑信息科技有限公司 | 基于扭矩整形的eps控制方法、装置、设备及存储介质 |
| CN116443100A (zh) * | 2023-05-16 | 2023-07-18 | 中国第一汽车股份有限公司 | 一种基于线性自抗扰的角度控制方法、装置、设备及介质 |
| CN116495055B (zh) * | 2023-05-26 | 2025-12-12 | 广汽传祺汽车有限公司 | 一种基于事件触发的线控转角跟踪控制方法、存储介质及设备 |
| CN116520857B (zh) * | 2023-07-05 | 2023-09-08 | 华东交通大学 | 一种车辆轨迹跟踪方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102730055A (zh) * | 2011-03-30 | 2012-10-17 | 通用汽车环球科技运作有限责任公司 | 用于电动力转向系统的基于摩擦力的健康状态指示器 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002166844A (ja) * | 2000-12-01 | 2002-06-11 | Toyoda Mach Works Ltd | 電動パワーステアリング装置の制御装置 |
| JP5540092B2 (ja) * | 2009-06-29 | 2014-07-02 | ボルボ ラストバグナー アーベー | 車両の軌道を変更するための方法及びシステム |
| CN106168758B (zh) * | 2016-05-24 | 2019-12-06 | 中国人民解放军空军第一航空学院 | 四轮独立驱动电动汽车的航向跟踪控制方法 |
| CN106627747B (zh) * | 2016-12-29 | 2019-04-12 | 南昌大学 | 一种线控四轮转向汽车抗侧向干扰的改进型滑模控制方法 |
| CN107839749B (zh) * | 2017-11-08 | 2021-01-19 | 南京航空航天大学 | 电动轮汽车转向路感及整车稳定性控制方法 |
| CN108163044A (zh) * | 2017-12-11 | 2018-06-15 | 同济大学 | 四轮独立驱动电动汽车的转向冗余与集成控制系统及方法 |
-
2019
- 2019-03-20 CN CN201910214609.1A patent/CN110077458B/zh active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102730055A (zh) * | 2011-03-30 | 2012-10-17 | 通用汽车环球科技运作有限责任公司 | 用于电动力转向系统的基于摩擦力的健康状态指示器 |
Non-Patent Citations (1)
| Title |
|---|
| "无人驾驶车转向系统自抗扰控制的研究";李一染 等;《上海师范大学学报(自然科学版)》;20100415;第39卷(第2期);第156-160页 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110077458A (zh) | 2019-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110077458B (zh) | 一种基于自抗扰控制的智能车转角控制方法 | |
| CN101369133B (zh) | 基于灰色预估器的低速摩擦伺服系统滑模变结构控制方法 | |
| Li et al. | Extended-state-observer-based double-loop integral sliding-mode control of electronic throttle valve | |
| CN111948943B (zh) | 一种柔性机械臂的组合滑模运动控制方法 | |
| CN110181510B (zh) | 一种基于时延估计与模糊逻辑的机械臂轨迹跟踪控制方法 | |
| CN104065322A (zh) | 一种电机位置伺服系统的输出反馈控制方法 | |
| CN114043480A (zh) | 一种基于模糊控制的自适应阻抗控制算法 | |
| Al-Samarraie et al. | Design of electronic throttle valve position control system using nonlinear PID controller | |
| CN116638544B (zh) | 一种基于超局部模型的关节模组协同控制方法 | |
| CN114859708A (zh) | 一种单连杆柔性机械臂跟踪控制方法 | |
| CN117970803B (zh) | 一种泵控电液转向系统的变速趋近与扰动补偿控制方法 | |
| CN110737197B (zh) | 一种基于无模型的柴油机转速自适应自抗扰控制方法 | |
| CN106707753A (zh) | 一种泵用直线电机自适应控制方法 | |
| Yin et al. | Steering tracking control based on assisted motor for agricultural tractors | |
| CN104570733B (zh) | 一种含磁滞补偿的电机伺服系统预设性能跟踪控制方法 | |
| Tan et al. | Online optimizing positioning control with model error compensator for LEGRV system | |
| CN109578156A (zh) | 基于参数辨识和非线性三步法的电子节气门控制方法 | |
| CN117608196A (zh) | 一种直流电机伺服系统的预设时间跟踪控制方法 | |
| Xiong et al. | Terrain-adaptive longitudinal control for autonomous trucks | |
| Wang | Robust control of electro-hydraulic coupling power steering system for intelligent commercial vehicle with varying vehicle speed | |
| Du et al. | Novel Energy-Efficient Variable-Speed Pump-Controlled Steering System With Enhanced Barrier Lyapunov Control for Heavy Vehicles | |
| CN104753441B (zh) | 一种伺服电机的基于k‑观测器的滑模预测控制方法 | |
| CN115163316B (zh) | 一种基于信号补偿控制器的电子节气门控制系统 | |
| CN120742702B (zh) | 滑移扰动下电力巡检机器人的比例型智能控制方法及装置 | |
| CN117031932B (zh) | 一种基于复合积分控制的滚珠丝杠传动误差补偿方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |