CN108968890B - 主-从柔性机器人内窥镜系统 - Google Patents
主-从柔性机器人内窥镜系统 Download PDFInfo
- Publication number
- CN108968890B CN108968890B CN201810433861.7A CN201810433861A CN108968890B CN 108968890 B CN108968890 B CN 108968890B CN 201810433861 A CN201810433861 A CN 201810433861A CN 108968890 B CN108968890 B CN 108968890B
- Authority
- CN
- China
- Prior art keywords
- endoscope
- tendon
- instrument
- robotic
- brake assemblies
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 210000002435 tendon Anatomy 0.000 claims abstract description 197
- 238000013519 translation Methods 0.000 claims abstract description 65
- 238000003032 molecular docking Methods 0.000 claims abstract description 34
- 230000033001 locomotion Effects 0.000 claims abstract description 33
- 238000005096 rolling process Methods 0.000 claims abstract description 31
- 230000007246 mechanism Effects 0.000 claims abstract description 29
- 239000012636 effector Substances 0.000 claims description 83
- 230000000712 assembly Effects 0.000 claims description 44
- 238000000429 assembly Methods 0.000 claims description 44
- 238000006073 displacement reaction Methods 0.000 claims description 23
- 230000000694 effects Effects 0.000 claims description 17
- 230000008878 coupling Effects 0.000 claims description 10
- 238000010168 coupling process Methods 0.000 claims description 10
- 238000005859 coupling reaction Methods 0.000 claims description 10
- 230000013011 mating Effects 0.000 claims description 4
- 238000006243 chemical reaction Methods 0.000 claims description 2
- 238000002788 crimping Methods 0.000 abstract description 5
- 238000003384 imaging method Methods 0.000 description 126
- 238000000034 method Methods 0.000 description 57
- 230000007704 transition Effects 0.000 description 18
- 230000008569 process Effects 0.000 description 16
- 238000010586 diagram Methods 0.000 description 15
- 238000012545 processing Methods 0.000 description 12
- 230000004044 response Effects 0.000 description 11
- 238000004891 communication Methods 0.000 description 10
- 238000001839 endoscopy Methods 0.000 description 9
- 230000006870 function Effects 0.000 description 8
- 239000000523 sample Substances 0.000 description 8
- 238000002674 endoscopic surgery Methods 0.000 description 7
- 238000004804 winding Methods 0.000 description 6
- 238000004873 anchoring Methods 0.000 description 4
- 238000013500 data storage Methods 0.000 description 4
- 230000009977 dual effect Effects 0.000 description 4
- 230000002040 relaxant effect Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 230000002262 irrigation Effects 0.000 description 3
- 238000003973 irrigation Methods 0.000 description 3
- 230000001360 synchronised effect Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 2
- 230000001070 adhesive effect Effects 0.000 description 2
- 238000005452 bending Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000005286 illumination Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000000717 retained effect Effects 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 230000004075 alteration Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 230000007717 exclusion Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 230000003116 impacting effect Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 230000008520 organization Effects 0.000 description 1
- 230000003534 oscillatory effect Effects 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000007619 statistical method Methods 0.000 description 1
- 238000001356 surgical procedure Methods 0.000 description 1
- 238000002627 tracheal intubation Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images



























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/0051—Flexible endoscopes with controlled bending of insertion part
- A61B1/0052—Constructional details of control elements, e.g. handles
- A61B1/0053—Constructional details of control elements, e.g. handles using distributed actuators, e.g. artificial muscles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/0051—Flexible endoscopes with controlled bending of insertion part
- A61B1/0052—Constructional details of control elements, e.g. handles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00131—Accessories for endoscopes
- A61B1/00133—Drive units for endoscopic tools inserted through or with the endoscope
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/301—Surgical robots for introducing or steering flexible instruments inserted into the body, e.g. catheters or endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
- A61B2034/715—Cable tensioning mechanisms for removing slack
Abstract
一种柔性机器人内窥镜从系统,包括内窥镜主体和从所述主体延伸的柔性细长轴,至少一个腱驱动的机器人内窥镜仪器可插入到所述柔性细长轴中;坞站,所述内窥镜主体与所述坞站可释放地对接;以及平移机构,用于当所述内窥镜主体对接时选择性地在所述柔性细长轴内纵向移动所述内窥镜器械。平移机构可以携带和选择性地替换通过腱驱动每个机器人内窥镜仪器的致动器。机器人仪器运动的至少一个自由度(DOF)由一对致动器和相应的一对腱控制。致动接合结构将致动器可释放地联接到用于驱动每个内窥镜仪器的适配器结构。腱预张力可以在可编程控制下自动发生。没有腱卷曲结构的滚动接头可以用于机器人内窥镜器械中以减少腱磨损和滚动接头空间体积。
Description
本申请是申请日为2015年03月19日,申请号为CN 201580024954.9的中国发明专利申请的分案申请,在此通过引用将原母案申请的全部内容结合到本申请中。
技术领域
一种主-从柔性机器人内窥镜系统的从系统包括一内窥镜本体和一自该本体延伸的柔性细长轴,至少一腱驱动机器人内窥镜仪器可插入该本体或长杆;一坞站,供内窥镜主体可释放地停驻;及一转换机构在所述内窥镜本体停驻时可操作的选择性的在纵向方将所述内窥镜仪器放入所述柔性长杆。一促动结构可释放地将电机盒制动器连接至一适配器结构以驱动每个内窥镜仪器。对于至少一些空间运动的DOF,两个制动器及两个相应的腱能控制每个DOF的仪器运动。在可编程的控制下,腱伸张能自动发生。一个没有腱卷边结构的滚动接头能被应用于机器内窥镜仪器,以减少腱磨损及滚动接头的空间体积。
背景技术
多种主-从机器人柔性内窥镜系统已提出或正在开发中。例如,国际专利申请号PCT/SG2013/000408和国际专利公开号WO 2010/138083描述的主-从机器人柔性内窥镜系统中,腱驱动机器人手臂和相应的末端执行器可插入内窥镜主体,该内窥镜主体具有自其延伸的柔性细长轴,从而使得机器人手臂和末端执行器可延伸出挠性细长轴的末端以执行内窥镜检查过程。驱动机器人手臂和它们的末端执行器的腱具有护套结构,如螺旋线圈护套。
柔性机器人内窥镜系统的组成部分,包括携带机器人手臂和相应的末端执行器,旨在用于插入人体要求尺寸最小化的柔性细长轴。遗憾的是,一些现有的柔性机器人内窥镜系统的体内导入部分具有比所需的相对于它们旨在被部署于身体内部环境更大的直径或截面面积。
在内窥镜检查过程中,由所述柔性细长轴携带的机器人手臂和末端执行器必须在任何时候都被精确地操纵以响应于外科医生产生的控制信号。柔性机器人内窥镜系统的挠性,允许柔性细长轴插入自然体孔,随后所述柔性细长轴沿着一条曲折或高度曲折路径到外科医生可以执行内窥镜检查过程的目标部位。然而,这样的灵活性本身会引起关于确保机器人手臂和它们的末端执行器在所述柔性细长轴沿着所述曲折路径延伸仍能保持精确控制的困难。更具体地说,取决于沿腱经过的路径,腱由机器人手臂和末端效应在空间操作其张力可以显著变化,导致腱松弛或腱反弹而降低机器人手臂及它们的末端执行器的一致性及高精度控制性。
因此需要一种能够克服这些问题的柔性机器人内窥镜检查系统。
发明内容
根据本公开的一方面,一种主-从内窥镜系统包括:一内窥镜包括一主体及自主体延伸出的柔性细长轴,所述柔性细长轴横跨其近端及远端之间的长度,所述柔性细长轴沿其长度方向有多个通道设置于其内,包括第一通道,第二通道及第三通道;机械驱动制动组件,其可拆卸的插入所述第一通道,所述机械驱动制动组件包括连接有一机械驱动末端执行器的一机器人手臂及多个可用于在其受力时空间操控所述机器人手臂及其末端执行器的腱;成像内窥镜,其可拆卸地插入所述第二槽;及手动驱动制动组件,其可拆卸的插入所述第三槽,所述手动驱动制定组合连接有一手动操作的内窥镜仪器。
所述第一组制动器可连接至所述机械驱动制动组件,并用于施力至所述多个腱。
所述成像内窥镜能构成一成像内窥镜组合的一部分,其包括适配器,通过所述适配器,所述成像内窥镜能连接至一用于给所述成像内窥镜提供冲击位移的制动器。所述成像内窥镜组合还包括承载在其中的多个腱,其通过适配器到第二组致动器的方式,所述第二组致动器用于向成像内窥镜提供起伏,摇摆和俯仰运动中的至少一种。
所述机械驱动制动组件还包括一可拆卸的连接至所述第一组制动器的适配器,其被配置为用于根据预定数量的自由度(DOF)运动,且所述第一组致动器包括对应于至少一个DOF的两个致动器。
根据本公开的一方面,一种主-从内窥镜系统包括:(a)具有主体的内窥镜,柔性细长轴从所述主体延伸,所述柔性细长轴跨越其近端和远端之间的长度,所述柔性细长轴具有沿其长度设置在其中的一组通道,一组致动组件可插入所述通道,所述多个通道包括第一通道和第二通道;(b)由所述一组通道承载的一组柔性机器人驱动制动组件,每个机器人驱动制动组件包括:机器人手臂,具有与其耦合的机器人驱动的末端执行器;以及多个腱,其耦合到所述机器人手臂并且被配置为根据预定数量的自由度(DOF)控制所述机器人手臂及其末端执行器的运动,其中两个腱控制所述机器人手臂的每个自由度;(c)对应于每个机器人驱动制动组件的一组致动器,每个致动器可通过外科医生可以与之相互作用的一组输入装置控制,每个致动器用于响应外科医生对该组输入设备的输入而选择性地将扭矩施加到其相应的机器人驱动制动组件的腱;其中两个致动器控制所述机器人手臂的每个自由度;及(d)处理单元,用于执行腱预张紧或再张紧程序,以通过以下方式自动地为每个机器人驱动制动组件的多个腱建立张力水平:(i)根据与代表性弯曲度配置相关联的预存的扭矩参数向所述机器人驱动制动组件的每个致动器施加扭矩,所述代表性弯曲度配置对应于所述机器人驱动制动组件沿其路由路径的弯曲度;或(ii)对于所述机器人驱动制动组件的每个腱:动态地确定所述腱的松弛状态和非松弛状态之间的扭矩转变点;以所述扭矩转变点决定的扭矩水平对与所述腱对应的致动器(例如,所述腱固定或安装到的一个制动器)施加扭矩。
在执行内窥镜手术之前,或将每个机器人驱动制动组件插入到柔性细长轴的通道内之后,在手术室外部,根据与所述代表性弯曲度配置相关联的存储的扭矩参数向所述机器人驱动制动组件的每个腱施加扭矩。
为每个腱动态地确定所述松弛状态和所述松弛状态之间的扭矩转变点,是在执行内窥镜手术之前或期间内随即发生的。为每个腱动态地确定所述松弛状态和所述不松弛状态之间的扭矩转变点包括:测量对应于所述腱的腱张力分布;和计算所述腱张力分布的第一和/或第二阶导数。
所述系统还包括与每个机器人驱动制动组件相应的仪器适配器,所述仪器适配器可移除地联接到所述致动器组,用于选择性地将所述机械驱动组合的多个腱联接到所述致动器组,其中所述仪器适配器用于在与所述致动器组分离时维持施加到所述机器人驱动制动组件的每个腱的张力。
根据本公开的一方面,一种主从内窥镜系统,包括:(a)一组机器人驱动制动组件,每个机器人驱动制动组件包括:机器人手臂,具有与其相连的机器人驱动的末端执行器;和多个腱,其被配置用于根据预定数量的自由度(DOF)控制所述机器人手臂和所述端部执行器的运动;和对应于每个机器人驱动制动组件并且联接到其腱的仪器适配器,所述仪器适配器可联接到一组机械元件,用于选择性地将所述机器人驱动制动组件的所述多个腱连接到一组致动器,所述仪器适配器包括:可旋转轴,其对应于所述机器人驱动致动组件的每个腱,所述可旋转轴具有纵向轴线,所述腱沿所述纵向轴线周向地缠绕;和对应于每个可旋转轴的第一张力维持元件和第二张力维持元件,其中所述第一张力维持元件相对于所述第二张力维持元件是可移位的,用于与所述第二棘轮元件选择性地接合和脱离,并且其中所述第一张力维持元件构造成用于当所述仪器适配器与该组机械元件脱离时与所述第二张力维持元件配合接合,以防止所述轴的旋转,从而保持所述腱中的张力水平。所述第一和第二张力维持元件各自包括棘轮元件和摩擦板中的一个。
所述仪器适配器还包括弹性偏置元件,当所述仪器适配器与该组机械元件分离时,所述弹性偏置元件将所述第一张力维持元件和所述第二张力维持元件保持在接合状态。当所述仪器适配器联接到该组机械元件时,所述弹性偏压元件可相对于所述轴移动,以使所述第一张力维持元件与所述第二张力维持元件脱离,使得所述轴可旋转。
所述致动器组包括对应于至少一个自由度的两个致动器,并且对于每个自由度,所述仪器适配器包括第一腱沿其周向缠绕的第一可旋转轴及第二腱沿其周向缠绕的第二可旋转轴,以控制机器人驱动致动组件的机器人手臂和端部执行器的运动。
根据本公开的一方面,一种主从内窥镜系统,包括:(a)内窥镜,具有主体及自主体延伸的柔性细长轴,所述柔性细长轴跨越其近端和远端之间的长度,所述柔性细长轴沿其长度方向有一组通道设置于其内,一组致动组件可沿该组通道的长度插入其内,所述多个通道包括第一通道和第二通道;(b)一组机器人驱动的致动组件,每个机器人驱动的致动组件包括:机器人手臂,具有与其相连的机器人驱动的末端执行器;多个腱,其耦合到所述机器人手臂并且被配置为根据预定数量的自由度(DOF)控制所述机器人手臂和所述末端执行器的运动;及围绕所述多个腱的外套筒;(c)第一仪器适配器,其对应于每个机器人驱动的致动组件并且联接到其腱,所述第一仪器适配器可联接到一组机械元件,用于选择性地将所述机器人驱动的致动组件的多个腱与一组机器人手臂/末端执行器操纵致动器;和(d)平移机构,其构造成用于沿着所述柔性细长轴的长度的预定分数独立地平移每个机器人驱动的致动组件,以实现所述机器人驱动的致动组件的冲击位移,所述平移机构包括以下之一:(i)由该组机器人驱动的致动组件的每个外部套筒承载的轴环;和一平移单元,包括:接收器,其被构造成用于接收机器人驱动的致动组件的外部套管;和线性致动器,其对应于每个接收器并且构造成用于沿着所述柔性细长轴长度的预定分数选择性地平移所述接收器;(ii)第二仪器适配器,其与每个第一仪器适配器可配合地接合,用于将对应于第一仪器适配器的机器人驱动致动组件的腱与该组机器人手臂/端部执行器操纵致动器联接;和平移单元,其构造成用于承载每个第一仪器适配器以及与其可匹配地接合的第二仪器适配器,并且使配合接合的每个第一仪器适配器和每个第二仪器适配器移位,以实现单独的机器人驱动的致动组件沿着柔性细长轴的长度的预定分数的冲击位移;和(iii)平移单元,其被配置用于移动各组机器人手臂/端部执行器操纵致动器和联接到其上的每个第一器械适配器,以实现单独的机器人驱动致动组件沿着柔性细长轴长度的预定分数的冲击位移。
每个第二仪器适配器通过具有多个腱的系绳联接到该组机器人手臂/末端执行器操纵致动器。
所述系统还包括坞站,所述内窥镜的主体的一部分可拆卸地接合到所述坞站,其中所述平移机构由所述坞站承载。
所述的系统,还包括携带所述平移机构的一组托架,其中该组托架中的每个托架对应于单独的机器人驱动致动组件,并且所述托架组中的每个托架联接到滚动运动致动器,其被配置用于围绕滚动轴线单独地旋转托架及其对应的机器人驱动致动组件,以向机器人驱动致动组件的机器人手臂和端部执行器提供滚动运动。所述内窥镜的主体的一部分可拆卸地接合到所述坞站,其中所述坞站承载所述平移机构和所述托架组。
根据本公开的一方面,一种腱控制的机器人手臂,包括:滚动接头,其包括具有穿过其的中心轴线的鼓结构,所述滚动接头被配置为响应于由其承载的腱的致动而绕所述中心轴线转动所述机器人手臂的部分,滚动接头不包括其上用于将腱锚固到轧滚动接头的腱卷曲端接件。
所述鼓结构包括外表面,且所述滚动接头包括:由外表面承载的并具有通道的顺时针致动滑轮,顺时针致动腱延伸通过该通道以使滚动接头沿顺时针方向旋转;和逆时针致动滑轮,其由外表面承载并且具有通道,逆时针致动腱延伸通过该通道以用于沿逆时针方向旋转滚动接头。
所述鼓结构包括至少一个Ω形或U形段,其分别提供相应的Ω形或U形通道,过道或槽,通过所述通道或槽,用于控制滚动接头的转动是可路由的。
一组孔眼形成于所述鼓结构中,所述腱可穿过该组孔眼,使得所述腱设置在所述鼓结构的外表面和所述鼓结构的内表面中的每一个上。所述鼓结构沿着腱路由路径从所述鼓的外侧承载腱,进入并穿过所述鼓的厚度到所述鼓的内侧,并且回穿过所述鼓的厚度到滚筒的外侧。粘合剂能将所述腱的外表面固定到所述滚筒的部分上。
附图说明
图1A和1B是根据本公开的实施例的主-从柔性机器人内窥镜检查系统的示意图。
图2是根据本公开的实施例的主系统的示意图。
图3是根据本公开的实施例的从系统的示意图。
图4A-4D分别是根据本公开的实施例的代表性运输内窥镜,第一和第二致动组件以及成像内窥镜组件的示意图。
图5是根据本公开的实施例的一对机器人手臂和由其承载的对应的末端执行器以及定位在超出运输内窥镜的远端的环境中的成像内窥镜的示意图。
图6A是根据本公开的实施例的运输内窥镜轴的代表性横截面图。
图6B是根据本公开的另一实施例的运输内窥镜轴的代表性横截面图。
图7A-7C是根据本公开的实施例示出了插入到运输内窥镜中的成像内窥镜组件,连接到成像子系统的成像连接器组件,连接到电机箱的成像输出适配器的成像输入适配器,以及连接到阀控制单元的内窥镜支撑功能连接器组件的示意图。
图8A-8B是示出了运输内窥镜对接到坞站的示意图,其中致动组件的外部套筒/线圈的部分和成像内窥镜组件的外套筒插入到运输内窥镜中,并且这种外部套筒牢固地联接到所述坞站的平移单元。
图8C是示出由坞站承载的代表性平移单元的示意图,其中在代表性的方式中对应于致动组件和成像内窥镜组件的套环元件由平移单元保持。
图9是示出根据本公开的实施例的每个致动组件的仪器输入适配器到对应于电机箱的相应仪器输出适配器的连接示意图。
图10是示出根据本公开的实施例的安装到电机箱的仪器输出适配器的仪器输入适配器的代表性内部部分的透视剖视图。
图11是示出根据本公开的实施例的当耦合在一起或配合地接合时仪器适配器和仪器输出适配器的代表性内部部分的相应横截面图。
图12A-12D是根据本公开的实施例示出了仪器输入适配器的致动接合结构的代表性内部部分以及其中元件的位置的横截面图,其对应于仪器输入适配器与仪器输入适配器与仪器的接合及仪器输入适配器与仪器输入适配器与仪器脱离的特定阶段的示意图。
图13A示出了本公开的替代实施例的坞站和对应的平移单元。
图13B示出了根据本公开的又一实施例的坞站和对应的平移单元。
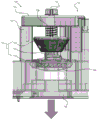
图13C提供了穿过坞站的部分的横截面前视图,坞站被配置成用于承载可旋转地联接到致动器的一组托架或鼓结构,通过该致动器,侧倾运动可单独地提供给一个或多个致动组件和/或成像内窥镜。
图14A示出了每个DOF配置的代表性单个致动器/电动机,以及可以与其相关联的潜在的反弹效应。
图14B示出了根据本公开的实施例的每DOF配置的代表性双致动器/电动机,以及这种配置导致减小或最小化反弹效应。
图15是根据本公开的实施例的离线/在线固定张紧技术,程序或过程的图示。
图16A是根据本公开的实施例的主动预张紧技术,流程或过程的图示,图16B是致动器/电机位置和与其对应的扭矩的代表图。
图16C-16F是分别指示在执行图16A的主动预张紧技术期间的时间特定致动器/电动机对的第一致动器/电动机的测量的电动机位置,测量的电动机速度,测量的电动机扭矩和测量的电动机扭矩的一阶导数的曲线图。
图16G-16J是分别指示在执行图16A的主动预张紧技术期间的时间所述致动器/电动机对的第二致动器/电动机的测量的电动机位置,测量的电动机速度,测量的电动机扭矩和测量的电动机扭矩的一阶导数的曲线图。
图17和18是示出根据本公开的实施例的无卷曲的基于滑轮的滚动接头或滚动接头元件的部分的示意图。
具体实施方式
在本公开中,一个图中给定元件的描述或对特定元件符号的考虑或使用或相应描述材料的引用可以包括另一个图中标识的相同,等同或类似的元件或元件符号。除非另有说明,在图中或相关文字内容中的“/”的使用被理解为意为“和/或”。本文中的特定数值或值范围的叙述被理解为包括或者是对近似数值或数值范围的列举,例如在+/-20%,+/-15%,+/-10%或+/-5%。
如本文所使用的,术语“集合”对应于或被定义为在数学上展示至少为1的基数的元素的非空有限组织(即,如本文所定义的集合可以对应于单元,或单元件集合或多元件集合),根据已知的数学定义(例如,以对应于数学推理:数字,集合和函数中所描述的方式,“11章:有限集的属性”(例如,如140页所示),彼得J.埃克斯,剑桥大学出版社(1998))。一般来说,集合的元素可以包括或者是系统,装置,设备,结构,对象,过程,物理参数或取决于所考虑的集合的类型的值。
本公开的实施例涉及主-从柔性机器人内窥镜检查系统,其包括主侧系统和可由主侧系统控制或控制的从侧系统。根据实施例细节,根据本公开的主-从柔性机器人内窥镜检查系统的一个或多个部分可以对应于或类似于或包括一种或多种类型的元件,结构和/或装置,其描述于(a)国际专利申请号PCT/SG2013/000408;和/或(b)国际专利公开号PCT/SG2013/000408。
图1A和1B是根据本公开的实施例的主-从柔性机器人内窥镜检查系统10的示意图。在一个实施例中,该系统10包括具有与其相关联的主侧元件的主系统或主侧系统100,以及具有与其相关联的从侧元件的从系统或从侧系统200。进一步参考图5,在各种实施例中,所述主系统100和从系统200被配置为彼此进行信号通信,使得主系统100可以向从系统200发出命令,从系统200可以精确地控制,操纵,定位和/或操作(a)由从系统200的内窥镜300(也称为运输内窥镜300)承载或支撑的一组机器人手臂400a,b及其相应的末端执行器410a,b,并且可能(b)响应于主系统输入由运输内窥镜300承载或支撑的成像内窥镜或成像探针构件460。
在各种实施例中,所述成像内窥镜或成像探针构件460通常被配置为响应从所述主系统100及/或所述运输内窥镜300承载的一组控制接收到的控制信号,而至少发生冲击位移和可能的滚动运动(例如,围绕成像内窥镜或成像探针构件460的中心或纵向轴线)。在一些实施例中,所述成像内窥镜/成像探针构件460被配置为如通过内部承载的腱进行起伏,摆动和/或俯仰运动,在这种情况下,所述成像内窥镜/成像探针构件460可以被称为机器人控制的成像内窥镜/成像探针构件460。用于空间地操纵机器人控制的成像内窥镜460/成像探针构件460的控制信号可以由主系统100产生和/或一组从系统控制,例如所述运输内窥镜300承载的控制按钮,开关,操纵杆等。
所述主系统100和从系统200还可以被配置为使得从系统200可以在所述机器人手臂410a,b和/或与之相连的末端执行器420a-b被定位,操纵或操作时动态地向主系统100提供触觉/触觉反馈信号(例如,力反馈信号)。这种触觉/触觉反馈信号与在机器人手臂410a,b和末端执行器420a,b所处的环境内施加在机器人手臂410a,410b和/或末端执行器420a-b上的力相关或对应。
根据本公开的各种实施例涉及手术情况或环境,例如,当患者或受试者在手术台或平台20上时对患者或受试者执行的自然孔径内窥镜手术(NOTES)程序。在这样的实施例中,所述从系统200的至少部分被配置为驻留在手术房(OT)或手术室(OR)内。根据实施例细节,所述主系统100可以驻留在OT/OR之内或之外(例如,接近或远离OT/OR)。主系统100和从系统200之间可以直接(例如,通过一组本地通信线路和/或本地无线通信)或间接通过一个或多个网络(例如,局域网(LAN),广域网(WAN)和/或因特网)进行通信。
图2是根据本公开的实施例的主系统100的示意图。在一个实施例中,所述主系统100包括携带左触觉输入设备110a和右触觉输入设备110b的框架或控制台结构102;一组附加/辅助手动操作的输入设备/按钮115;一组脚踏控制器或踏板120a-d;显示装置130;和处理模块150。所述框架/控制台结构102可以包括一组轮子104,使得主系统100在预期的使用环境(例如,OT/OR,或在房间外部或远离房间)中容易地便携/定位;和一组臂支撑件112。在代表性内窥镜检查过程期间,外科医生自身相对于主系统100定位或座置,使得他们的左手和右手可以保持或与左触觉输入设备110a和右触觉输入设备110b交互,且他们的脚可以与踏板120a-d相互作用。所述处理模块150处理从触觉输入设备110a,b,附加/辅助手操作输入设备115和踏板120a-d接收的信号,并且向从系统200发出相应的命令,以便操纵/定位/控制机器人手臂410a,b和与其对应的末端执行器420a,b,并且可能操纵/定位/控制成像内窥镜460。所述处理模块150还可以从从系统200接收触觉/触觉反馈信号,并且将这样的触觉/触觉反馈信号传送到触觉输入设备110a,b。所述处理模块150包括计算/处理和通信资源(例如,一个或多个处理单元,包括随机存取存储器(RAM)只读存储器(ROM)的存储器/数据存储资源以及可能的一种或多种类型的磁盘驱动器,和串行通信单元和/或网络通信单元),以相关领域的普通技术人员容易理解的方式。
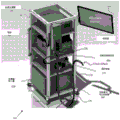
图3是根据本公开的一个实施例的从系统200的示意图。在一个实施例中,从系统200包括具有柔性细长轴312的内窥镜或运输内窥镜300;坞站500,运输内窥镜300能选择性地/可选择性地联接(例如,安装/对接和拆卸/解除对接)至坞站500;成像子系统210;内窥镜检查支持功能子系统250和相关联的阀控制单元270;致动单元或电机箱600;和主控制单元800。在若干实施例中,所述从系统200另外包括被配置用于承载至少一些从系统元件的患者侧车,支架或支架202。所述患者侧车202通常包括轮子204,以便于从系统200的便携性和定位(例如,在OT/OR内的期望位置)。
简言之,所述成像子系统210便于向成像内窥镜460提供或传递照明,以及处理和呈现由成像内窥镜460捕获的光信号。所述成像子系统210包括被配置为以相关领域的普通技术人员容易理解的方式呈现(例如,基于实时地)成像内窥镜460捕获的图像的可调节显示设备220。与阀控制单元270相关联的内窥镜检查支持功能子系统250便于对运输内窥镜300选择性地控制提供吹气或正压,抽吸或负/真空压力和冲洗,这也是本领域普通技术人员容易理解的。所述致动单元/电机箱600提供多个致动器或马达,其被配置用于在包括一组马达控制器的主控制单元800的控制下驱动机器人手臂410a,b和末端执行器420a,b。
主控制单元800另外还管理主系统100和从系统200之间的通信,并且处理从主系统100接收的输入信号,以便以直接地精确地对应到主系统的触觉输入设备110a,b的外科医生操纵的方式操作机器人手臂410a,b和末端执行器420a,b。在多个实施例中,所述主控制单元800还产生上述触觉/触觉反馈信号,并且将这些触觉/触觉反馈信号实时地传送到主系统100。在一些实施例中,所述触觉/触觉反馈信号可以通过设置在运输内窥镜的轴312和/或主体310(例如,驻留在电机箱600中的传感器)附近的传感器产生,而不使用或排除承载在运输内窥镜的轴312和/或主体310之内或末端的传感器(例如,承载在机器人手臂410或端部执行器420上,附近或大体上邻近的传感器)。所述主控制单元800包括信号/数据处理,存储器/数据存储和信号通信资源(例如,一个或多个微处理器,RAM,ROM,可能是固态或其他类型的磁盘驱动器,以及串行通信单元和/或网络接口单元),以相关领域的普通技术人员容易理解的方式。
进一步参考图4A-4D所示,所述运输内窥镜300包括主体或壳体310及自其延伸的柔性细长轴312。所述运输内窥镜300还包括内窥镜支撑功能连接器组件370,通过该组件,运输内窥镜主体310可以以相关领域的普通技术人员容易理解的方式联接到内窥镜支撑功能子系统250。
所述主体310限定运输内窥镜300的近端部分,边界,表面或端部,并且提供多个孔,开口或端口,通过其可以接近在运输内窥镜轴312内并沿着运输内窥镜轴312延伸的通道或通道。在一些实施例中,所述主体310还提供用于为运输内窥镜300的控制接口,内窥镜可通过该控制接口对运输内窥镜的轴312施加导航控制。例如,所述主体310可包括多个控制元件,如一个或多个按钮,旋钮,开关,杆,操纵杆和/或其它控制元件,以便以相关领域的普通技术人员容易理解的方式对运输内窥镜操作的内窥镜控制。
所述轴312终止于运输内窥镜300的远端314,并且轴312内的通道/过道终止于设置在轴远端314处,接近轴远端或轴远端附近的开口或孔。在各种实施例中,由运输内窥镜300提供的通道/过道包括一组仪器通道,附加通道,以使充气或正压,抽吸或真空压力和冲洗传送到轴312的远端所处的环境。
该组仪器通道包括至少一个通道,其构造成用于承载柔性致动组件400的能够插入运输内窥镜300和从运输内窥镜300中抽出的部分。每个致动组件400包括机器人手臂410和与其对应的末端执行器420;柔性控制元件,肌腱元件或肌腱,其可使机器人手臂410和末端执行器420根据预定数量的DOF被定位或操纵;以及接口或适配器,通过该接口或适配器,致动组件的柔性腱可机械地联接到电动机箱600内的特定致动器并与其分离。在各种实施例中,每个腱位于相应的柔性护套(例如,螺旋线圈)内。给定的腱和其相应的护套可以被定义为腱/鞘元件。在多个实施例中,致动组件400可以是一次性的。
在图4A-4B所示的实施例中,给定的致动组件400a,b包括机器人手臂410a,b及其对应的末端执行器420a,b;在内部承载多个腱/鞘元件的柔性细长外套筒和/或线圈402a,b,使得张力或机械力可选择性地施加到特定腱元件,以精确地操纵和控制机器人手臂410a,b和/或末端执行器420a,b;以及仪器输入适配器710a,b,通过该仪器输入适配器710a,b,外部套筒402a,b可以机械地联接到电机箱600内的相应致动器,如下面进一步详细描述的那样。
所述机器人手臂410a,b,末端执行器420a,b和外套筒/线圈402a,b的部分可以插入到运输内窥镜轴312的仪器通道中,使得机器人手臂410a,b和末端执行器420a,b到达或大约到达并且可以延伸超过轴312的远端314预定距离。如下详述的,所述致动组件的外套筒/线圈402a,b,且因此机器人手臂410a,b和端部执行器420a,b可以通过平移模块、单元、台或机构的方式选择性地纵向平移或波动(例如,相对于运输内窥镜轴312的远端314向远侧或近侧偏移),使得相对于轴312的远端314的机器人手臂410a,b及末端执行器420a,b的近-远部分可以在超过轴312的远端314的环境内调节,直到远离轴312的远端314的预定最大距离,以用于执行内窥镜检查程序。
在特定实施例中,所述致动组件400a,b包括套环元件,夹套或带430a,b,其围绕外套筒/线圈402a,b的至少一部分,远离端部执行器420a,b的远侧尖端预定距离。如下面详细描述的,套环元件430a,b被设计成与平移机构的接收器匹配地接合,使得套环元件430a,b相对于轴312的远端跨过给定距离的纵向/浪涌平移导致机器人手臂410a,b和末端执行器420a,b相应的纵向/浪涌平移。
在一些实施例中,设置在运输内窥镜轴312内的渠道/通道还包括成像内窥镜通道,其被配置用于承载柔性成像内窥镜组件450的部分,其可以插入到运输内窥镜300中和从运输内窥镜300退出,其中所述柔性成像内窥镜组件450对应于或包括成像内窥镜/成像探针构件460的至少一部分。以类似于或大体上类似于上述致动组件400a,b的方式,在一个实施例中,成像内窥镜组件450包括柔性外套筒,线圈或轴452,其围绕或形成柔性成像内窥镜的外表面460;可能的成像输入适配器750,通过该成像输入适配器750,与成像内窥镜460对应或在成像内窥镜460内的一组腱可机械地耦合到电机箱600内的相应致动器,使得成像内窥镜460的远端部分可根据在运输内窥镜轴312的远端314处,附近和/或外部的环境内的一个或多个DOF(例如,升沉和/或摇摆运动)可选择性地被操纵或定位;以及成像连接器组件470,所述成像内窥镜460的电子和/或光学元件(例如,光纤)可以通过该成像连接器组件470分别电子地和/或光学地耦合到成像子系统210的图像处理单元。例如,在一些实施例中,所述成像内窥镜460可以包括或耦合到腱,使得成像内窥镜460的远端或面可以选择性地/可选择地捕获机器人手臂410a,410b和末端执行器420a,420b的顺行和逆行图像,b。在一些实施例中,成像内窥镜组件450可以是一次性的。
以与致动组件400a,b相同,实质相同或类似的方式,成像内窥镜组件450的外部套筒452以及成像内窥镜460的远端相对于运输内窥镜轴312的远端314通过平移机构选择性地平移/波动,使得成像内窥镜460的纵向或近端-远端位置可在轴312的远端处,附近和/或超出轴312的远端跨越与内窥镜检查程序相关联的预定近侧-远侧距离范围。在多个实施例中,所述成像内窥镜组件400包括套环元件430c,套环元件430c在离成像内窥镜450的远端预定距离处围绕成像内窥镜组件的外套筒452的至少部分。套环元件430c用于与平移机构的接收器配合接合,使得套环元件430c相对于运输内窥镜轴312的远端的给定距离的纵向/波动位移导致成像内窥镜460的远端相应的纵向平移/波动位移。
如上所述,所述致动组件400a,b和成像内窥镜组件450被构造成分别插入及抽离所述运输内窥镜300的仪器通道和成像内窥镜通道。当在内窥镜检查程序期间致动组件400a,b和成像内窥镜组件450在其在运输内窥镜轴312的远端314外部的环境中的操作之前已经完全插入到运输内窥镜300中时,每个套环元件430a-c保持在运输内窥镜的轴312的外部并且至少稍微远离运输内窥镜的轴312,并且在各种实施例中保持在运输内窥镜的主体310之外并且至少稍微远离运输内窥镜的主体310,使得给定的套环元件430a-c的纵向平移或波动横跨预定的近端-远端距离范围可以通过平移单元自由地发生,而没有来自运输内窥镜的轴312和/或主体310的干扰。
因此,每个致动组件400a,b的外部套筒/线圈402a,b必须远离其轴环元件430a,b的远侧边缘地向远侧延伸足够的长度,使得末端执行器420a,b当轴环元件430a,b位于相对于平移单元的最近侧位置时到达或大致到达运输内窥镜轴312的端部314。类似地,成像内窥镜组件的外套筒452必须远离其轴环元件430c向远侧延伸足够的长度,使得成像内窥镜460在套环元件430c相对于平移单元处于最近侧位置时其位置位于、接近、或邻近所述运输内窥镜轴312的端部。
在多个实施例中,所述运输内窥镜300被配置为承载两个致动组件400a,b,加上单个成像内窥镜组件450.每个致动组件400a,b通常对应于给定类型的内窥镜工具。例如,在代表性实施方式中,第一致动组件400a可以携带具有抓紧器或类似类型的末端执行器420a的第一机器人手臂410a;且第二致动组件400b可以携带具有烧灼铲刀或类似类型的烧灼端部执行器420b的第二机器人手臂410b。
在某些实施例中,所述运输内窥镜300可被构造成承载另一数量的致动组件400。此外,运输内窥镜300的横截面尺寸,其中的通道/过道,一个或多个致动组件400和/成像内窥镜组件450可以根据给定类型的外科/内窥镜过程和/或所考虑的运输内窥镜轴尺寸/尺寸约束来确定,选择或指定。
图6A是根据本公开的另一个实施例的运输内窥镜轴312的代表性截面图,其中的通道/过道包括具有大的或最大的横截面积/直径的主仪器通道330,以容纳高/最大DOF机器人手臂/末端执行器410,420;具有比主仪器通道330更小或明显更小的横截面面积/直径的次要仪器通道360,其可构造成用于容纳手动操作的常规内窥镜器械/工具,例如传统的抓紧器(例如,在这样的实施例,机器人致动组件400以及常规/手动致动组件可以插入到运输内窥镜主体310中的相应端口中);以及用于容纳成像内窥镜460的成像内窥镜通道335。
图6B是根据本公开的又一个实施例的运输内窥镜轴312的代表性横截面图,其中的通道/过道包括具有与图6A中实施例的运输内窥镜轴相比较小(横)截面的第一和第二仪器通道332a,b,用于容纳减少/限制的DOF机器人手臂/末端执行器410a,b,420a,b的截面面积或直径;及构造成用于容纳成像内窥镜460的成像内窥镜通道335。
如图6A和6B所示的运输内窥镜杆实施例可以以本领域普通技术人员容易理解的方式产生比本文其它地方描述的运输内窥镜轴312更小的总横截面积,以便于给定类型的内窥镜检查程序和/或改进插管。
代表性的程序设置和接口耦合到电机箱
图7A-9示出了代表性的设置程序的一部分,通过该部分,成像内窥镜组件450和一对致动组件400a,b可以插入到运输内窥镜300中,并且联接或结合包括电机箱600的从属系统200的其它部分。
如图7A所示,成像内窥镜组件的外套筒452远离与其对应的套环元件430c的部分可以插入到形成在运输内窥镜主体310中的预期或适当尺寸的开口或端口中,使得成像内窥镜460可以被送进沿着运输内窥镜的轴312向远侧前进到相对于其远端314的初始预期的,默认的或停放的位置。如前所述,联接到成像内窥镜组件的外套筒452的套环元件430c保持在运输内窥镜的轴312的外部。更具体地,在所示的实施例中,套环元件430c保持在运输内窥镜主体310的外部,使得套环元件430c位于接收成像内窥镜组件450的外套筒452的端口附近的给定距离处。所述成像连接器组件470可以耦合到成像子系统210,例如,如图7A所示的方式,如相关领域的普通技术人员容易理解的那样,使得成像内窥镜460可以输出照明并捕获图像。
进一步如图7B所示,所述成像内窥镜组件的成像输入适配器750可以耦合到电机箱600的相应成像输出适配器650。通过这种适配器到适配器的连接,成像内窥镜组件的外套筒452内部的一组腱机械地联接或链接到电机箱600内的一个或多个致动器或电动机。这样的腱构造成用于根据一个或多个自由度定位或操纵成像内窥镜460。因此,作为通过在与成像内窥镜位置控制相关联的电机箱600内的一个或多个致动器向所述成像内窥镜组件的腱选择性地施加张力的结果,可以相对于所述运输内窥镜的轴312的远端314以特定方式选择性地定位或操纵所述成像内窥镜460与成像内窥镜位置控制相关联的电动机箱600。
除了上述结构之外,所述运输内窥镜的支撑功能连接器组件370可以例如以图7C中所示的方式联接到内窥镜检查支撑功能子系统270,以便于以相关领域的普通技术人员容易理解的方式提供吹气或正压,抽吸或负/真空压力和灌溉。
如图8A所示,所述运输内窥镜主体310可以对接或安装到坞站500,并且成像内窥镜组件的套环元件430c可以插入到或与之配合地接合至由与坞站500相关联的平移单元510提供的接收器或夹子530c。一旦成像内窥镜组件的套环元件430c被其相应的夹子530c固定,所述成像内窥镜组件的套筒452可以由平移单元510跨越预定的近端-远端距离范围选择性地/可选择地纵向平移或涌动,如下面进一步详细描述的,例如,响应于外科医生在主系统100处操纵的触觉输入设备110a,b或其他控制(例如,脚踏板)和/或对运输内窥镜主体310上的控制元件的内窥镜操作(例如,其中外科医生输入可以覆盖指向纵向平移/冲击成像内窥镜460的内窥镜输入)。
进一步参考图8B,以与上述类似的方式,每个致动组件400a,b远离相应的致动组件套环元件430a,b的部分可以插入到运输内窥镜300的主体310内的预期/适当尺寸的端口中。因此,每个机器人手臂410a,b和末端执行器420a,b可以沿着运输内窥镜的轴312朝向并朝向相对于轴的远端314的初始预期、默认或停放位置被送入并向远端前进。由每个致动组件的外套筒/线圈402a,b承载的套环元件430a,b保持在运输内窥镜轴312的外部,并且在几个实施例中,在运输内窥镜主体310的外部,使得每个套环元件430a,b以预定距离靠近致动组件400a,b的接收外套筒/线圈402a,b的端口。
以与用于成像内窥镜组件450的方式类似的方式,每个致动组件的套环元件430a,b可以插入到由平移单元510提供的对应的接收器或夹子530a,b中或与其配合地接合。一旦每个这样的套环元件430a,b被其相应的夹子530a,b固定,平移单元510可以跨预定的近端-远端距离选择性地/可选择地纵向平移或摆动致动组件400a,b中的一个或两个(例如,以独立的方式),例如,响应于外科医生在主站100处对一个或两个触觉输入设备110a,b的操纵。
图8C是示出与坞站500相关联或由坞站500携带的代表性的平移单元510的示意图,以及对应于致动组件400a,b和成像内窥镜组件450的套环元件430a-c被相应的平移单元夹子530a-c固定的代表性方式。所述平移单元510可以包括对应于每个致动组件400a,b以及成像内窥镜组件450的独立可调/可位移平移台。在代表性实施方式中,给定的平移台可以包括或可以是滚珠丝杠或线性致动器,其被配置成用于以相关领域的普通技术人员容易理解的方式跨预定的最大距离范围向对应的夹具530提供纵向/冲击位移。
图9是示出根据本公开的实施例的每个致动组件的仪器输入适配器710a,b与电机箱600的对应的仪器输出适配器610a,b耦合的示意图。通过这种适配器-适配器联接,每个致动组件的外套筒/线圈402a,b内部的腱可机械地联接或链接到电机箱600内的特定致动器或马达。对于任何给定的致动组件400,这种腱,其被配置为根据预定的DOF来定位或操纵机器人手臂410a,b和相应的末端执行器420a,b。因此,由于通过与机器人手臂/端部执行器位置控制相关联的电动机箱600内的一个或多个致动器/电动机对致动组件内的腱选择性地施加张力,每个致动组件的机器人手臂410a,b和端部执行器402a,b可以相对于运输内窥镜轴312的远端314选择性地被定位或操纵400a,b。此外,这种适配器到适配器联接使得能够在内窥镜检查程序开始之前在每个致动组件400a,b内的肌腱中建立,再建立或验证预期的,期望的或预定的张力水平(例如,肌腱预张力水平),并且在一些实施例中,在内窥镜手术期间实时建立或调整肌腱张力水平。此外,在各种实施例中,当器械输入适配器710a,b不接合时,这种适配器到适配器的联接使得在如下详述的仪器输入适配器710a,b不连接或脱离所述仪器输入适配器610a,b时能够维持致动器组件腱中的给定或预定的张力水平(例如,预定的最小张力水平)。
代表性的输入适配器和输出适配器结构及联接
图10是示出根据本公开的实施例安装到电动机箱600的仪器输出适配器610的致动组件仪器输入适配器710的代表性内部部分的透视剖视图。图11是示出根据本公开的实施例耦合在一起或匹配地接合的仪器适配器710和仪器输出适配器610的代表性内部部分的相应横截面图。图12A-12D是示出了由仪器输入适配器710提供的致动接合结构720的代表性内部部分以及其中的元件的位置的横截面图,其对应于本公开实施例仪器输入适配器710结合至仪器输出适配器610及仪器输入适配器710脱离所述仪器输出适配器610的多种阶段。
参考图10,在一个实施例中,仪器输入适配器710包括多个致动接合结构720,例如用于每个电机箱致动器/马达620的单独致动接合结构720,其被配置用于控制与仪器输入适配器关联的特定制动组件400的机器人手臂/末端执行器410,420。
在某些实施例中,电机箱600包括用于控制机器人手臂/端部执行器410,420的每个自由度的单个致动器/电机,在这种情况下,仪器输入适配器710包括对应于每个这种自由度的单个致动接合结构720。在这样的实施例中,任何给定的自由度对应于单个腱(其位于其特定的鞘内)。
在不同的实施例中,电机箱600包括用于控制由致动组件的机器人手臂/末端执行器410,420提供的每个自由度的双重或成对的致动器/电机620。在这样的实施例中,任何给定的自由度与一对腱(例如,位于第一护套内的第一腱,以及位于第二护套内的第二腱)对应。在这种情况下,电机箱600内的两个致动器/电动机相对于彼此同步地致动,使得给定的一对腱(例如,第一腱和第二腱)控制机器人手臂/端部执行器410,420的给定自由度。
因此,仪器输入适配器710相应地包括对应于每个机器人手臂/端部执行器的DOF的一对致动接合结构720。在其中机器人手臂/端部执行器410,420相对于六个自由度可定位/可操纵的代表性实施方式中,电机箱600包括用于控制该机器人手臂/端部执行器410,420的十二个致动器/电动机600a-1,以及仪器输入适配器710包括十二个致动接合结构720a-1。所述仪器输入适配器710安装到电机箱600,使得特定的一对致动接合结构720(例如,沿仪器输入适配器710的长度相对于彼此并排布置的致动接合结构720)对应于且机械连接到电机箱600内的对应的一对致动器/电机620a-1,用于提供关于特定机器人手臂/端部执行器的自由度的机器人手臂/端部执行器可操纵性/可定位性。
如图11及图12A-12D所示,在一个实施例中,致动接合结构720包括(a)具有多个臂构件723的框架构件722,其支撑限定框架构件722的上边界的框架构件平台724,其中框架构件平台724垂直或横向于这种臂构件723;(b)细长输入轴726,其向上延伸通过框架构件的平台724的中心或中心区域,并且向下朝向电机箱输出适配器610的输出盘626延伸,使得其可以由此接合,并且其可沿着纵向轴线(例如,在平行于其长度的垂直方向上)移动;(c)鼓结构730,其安装到输入轴726并周向设置于输入轴726的周围,其包括(i)具有上表面,外表面和底表面的锥形鼓732,以及(ii)第一棘齿元件734在离开滚筒732的底表面预定距离处垂直或横向于输入轴726承载;(d)在框架构件的平台724的下侧和滚筒732的上表面之间围绕输入轴726周向设置的弹性偏压元件或弹簧728;以及(e)第二棘轮元件744,其垂直或横向于输入轴726并且围绕输入轴726周向设置,并且在离开框架构件的平台724的下侧的预定距离处设置在第一棘轮元件734的下方。在各种实施例中,第二棘轮元件744相对于输入轴726在位置上固定,不可运动或不可移位。
所述鼓结构包括凸缘部分733,其限定鼓732的底表面和第一棘齿元件734的上表面之间的空间间隙。腱的近端可以联接,连接或固定到鼓结构730的一部分(例如,承载在第一棘齿元件734的上表面上的压接固定件/抵接部),并且所述腱可以紧密地缠绕在鼓结构的凸缘部分733的圆周周围,使得凸缘部分733在其周围承载多个或多个腱束绕组。在朝向其相对/远端的方向上,围绕凸缘部分722733缠绕的腱可以远离鼓结构730朝向,进入并沿着致动器组件的外套筒/线圈402的长度延伸,直到到达致动器组件的机器人手臂410上的给定位置(例如,相对于机器人手臂接头或关节元件的特定位置)。
所述鼓结构730的旋转或输入轴726的相应旋转导致腱围绕鼓结构的凸缘部分733的进一步缠绕,或腱从凸缘部分733的部分展开,这取决于鼓结构730的旋转方向。腱围绕凸缘部分733的缠绕导致腱张力的增加,并且可以减少驻留在致动器组件的外套筒/线圈402内的腱的长度;并且从凸缘部分733展开腱导致肌腱张力减小,并且可以以相关的普通技术人员容易理解的方式增加驻留在致动组件的外套筒/线圈402内的腱的长度。因此,选择性的腱的卷绕/退绕有助于或能够实现机器人手臂/端部执行器410,420相对于特定DOF的精确操纵/定位。
更具体地,在为每个DOF提供双电机控制的实施例中,通过对应鼓结构730的同步旋转,对应于特定DOF的成对腱的同步卷绕/退绕导致机器人手臂/端部的操纵/定位根据该DOF的效应器410,420。这种同步鼓结构旋转可以通过一对致动器/马达620和对应的输出盘626选择性地/可选择地发生,致动接合结构输入轴726可以旋转地联接到该对输出盘626,如下面进一步详细描述的。
当仪器输入适配器710未与电动机箱600的仪器输出适配器610接合或已从电机箱600的仪器输出适配器610脱离时,致动接合结构的弹簧728将致动接合结构的鼓结构730向下偏置或推动到第一或默认位置,如此第一棘轮元件734与第二棘轮元件744牢固地配合地接合。图6示出了当弹簧728向下压鼓结构730时,第一棘轮元件734与第二棘轮元件744的这种接合。由于第一和第二棘齿元件734,744的这种接合,防止鼓结构730旋转,因此对应于鼓结构730的腱中的张力被维持或保留(例如,腱中的张力不能改变或明显改变)。
如上所述,所述致动接合结构的输入轴726可平行于或沿着其纵向轴线移动。当仪器输入适配器710装到或安装到电机箱600的仪器输出适配器610上时(例如,通过一个或多个卡扣配合联接),位于第二棘齿元件744下由所述输入轴726承载的一下板728的底表面接触由与特定致动器/马达620相关联的输出盘628的上表面承载的一组突出部。因此,如图12B所示,所述弹簧728被压缩,并且输入轴726和由此承载的鼓结构730向上移位,使得鼓732的上表面和框架构件的平台724的下侧之间的距离减小。所述鼓结构730的这种向上移位导致第一棘轮元件734脱离第二棘轮元件744。这可以对应于仪器输入适配器710安装或装在电机箱600的仪器输出适配器上的情况,但是输入轴726还没有与致动器/马达620的输出盘626旋转地可转动/旋转地联接。
在将仪器输入适配器710安装到电动机箱600的仪器输出适配器610上时,或者一旦仪器输入适配器710被完全/牢固地安装到仪器输出适配器610上(例如,可以通过一组传感器),对应于输入轴726和鼓结构730已向上竖直移位并且第一和第二棘轮元件已经彼此脱离的情况,电机箱600内的致动器/马达620开始初始化过程(例如,在控制单元800的指导下)。在初始化过程期间,每个致动器/马达620旋转其对应的输出盘628,直到由输出盘628承载的一组凸起与输入轴的下板728的底表面内的对应凹口接合或配合地接合。
一旦由输出盘628承载的凸起与形成在输入轴的下板728中的对应凹口卡合或配合地接合,输入轴726以图12C所示的方式旋转地联接到预期的致动器/马达620。当这种输出盘凸起和下板凹槽旋转地联接时,致动器/马达620可以选择性地精确地控制腱围绕鼓结构730的套环部分733的缠绕和解绕,和/或精确地控制腱张力,从而响应于在所述主站100处接收的外科医生输入以预期方式操纵/定位所述机器人手臂/端部执行器410,420。
当仪器输入适配器710被脱离,拆卸或从仪器输出适配器610分离时,弹簧728的回弹力将鼓结构730的上表面向下推动,使得第一棘齿元件734与第二棘齿元件744以图12D所示的方式配合的结合。因而防止输入轴726和盘结构730的旋转,并且因此以基本上相同于或类似于上述关于图12A所述的方式保持腱张力。
在替代性的实施例中,所述第一和第二棘齿元件734,744可以由第一和第二摩擦片734,744或其他类型的可牢固啮合/可释放结构(例如,具有对应的阳性和阴性接合元件的盘)代替或实施,其构造成用于在接合时可靠地保持或保持张力腱(例如,相对于输入轴的纵向轴线可靠地防止腱卷绕/展开直到脱离)。被配置用于在接合时可靠地维持或保持腱张力的这样的第一和第二元件734,744,因此其可以被称为腱张力维持元件或抗旋转元件。
代表性的各种坞站/平移单元配置
由坞站500携带或并入坞站500的平移单元510使得每个致动组件400a,b和成像内窥镜组件450(例如,基于个体)能纵向/冲击位移。在上述实施例中,所述平移单元510包括接收器或夹子530a-c,其被配置为与致动组件400a,b或成像内窥镜组件450的外套筒402a-c所承载的相应套环430a-c配合接合。此外,上述仪器输入适配器710和成像输入适配器750,以及电机箱600的仪器输出适配器610和成像输出适配器650位于远离坞站500的位置。
图13A示出了根据本公开的坞站500的替代实施例,其中坞站500及其平移单元510被配置用于承载一组仪器输出适配器610和一成像输出适配器650,仪器输入适配器710和成像输入适配器750可以被装在或安装在其上。在这样的实施例中,所述平移单元510的致动级可以独立地向近端-远侧地移动每个仪器输出适配器610,并且因此连接到其上的每个仪器输入适配器710;以及成像输出适配器650,从而耦合到其上的成像输入适配器750,使得机器人手臂/末端执行器410a,b,420a,b和成像内窥镜460可以相应地纵向移位/摆动。在一些实施例中,每个仪器输出适配器610和成像输出适配器650可以通过一组系绳502耦合到电机箱600,例如,其联接或链接到由电机箱600承载的一组附加或次级输出适配器结构。如相关领域的普通技术人员根据本文的描述将理解的,每个系绳502包括或承载一组构造成用于传递机械力的腱。
图13B示出了根据本公开的坞站500的又一实施例,其中坞站500被配置为用于携带电机箱600,并且平移单元510被配置为用于近侧-远侧地移动各组致动器/电动机620(例如,移动对应于特定或选择的单独致动组件400的致动器/马达620)以及与之耦合的每个仪器输出适配器610和仪器输入适配器710,加上成像输出适配器650和成像输入适配器750(如果存在),以独立地纵向移动/摆动每个机器人手臂/末端执行器410a,b,420a,b和成像内窥镜460。
因此,在如图13B所示的实施例中,所述平移单元510携带每个仪器输入适配器710和成像输入适配器750可联接/耦合到的致动器/马达620,其中这些致动器/马达620被配置成用于实现每个机器人手臂410a,b及其对应的末端执行器420a,b,并且在支持它的那些实施例中,在内窥镜手术期间对成像内窥镜460的选择性非摆动空间定位/操纵。所述平移单元510构造成用于选择性地移动致动器/马达620(以及相应地,所述仪器适配器710或与其接合的成像输入适配器750)的特定组或子集,从而在最大浪涌位移距离内或横跨最大浪涌位移距离(例如,高达约10-15cm)移位/摆动给定的机器人手臂/端部执行器410a,b,420a,b。对应于每个机器人手臂/末端执行器410a,b,420a,b的致动器/马达620可以被携带和选择性地平移以通过相关联的线性平移台,机构或装置来实现机器人手臂/平移单元510,例如滚珠丝杠或线性致动器来实现机器人手臂/末端执行器的冲击移动。类似地,对应于成像内窥镜460的致动器/马达620可以被携带和选择性地平移以通过平移单元510的另一线性平移台,机构或装置(例如滚珠丝杠或线性致动器)实现成像内窥镜的冲击位移。
如图13A-13B所示的实施例,可以通过缩短每个腱的远端和电机箱600内的致动器/电机620之间的距离来减少腱反冲的量,并且因此可以更精确地保持腱张力的预期的/可预测的水平或范围。例如图13B所示的实施例,可以导致系统100具有高度一致/可预测的腱张力水平/范围和显著减小或最小化/最小化腱齿隙。
在一些实施例中,除了承载一组冲击位移/近端-远端平移机构500之外,坞站500还构造成用于承载一组机构或装置,一些或每个致动组件400a,b和/或成像内窥镜460可以选择性地围绕它们的纵向轴线或中心轴线单独地旋转,从而分别允许致动组件400a,400b和/或成像内窥镜460选择性的单独滚动运动。在这样的实施例中,所述致动组件400a,b和/或成像内窥镜组件450不需要包括内部侧倾运动机构本身(例如,一个或多个内部侧倾关节)。而是,通过分别在致动组件400a,b和/或成像内窥镜460外部的机构或装置,可以向致动组件400a,400b和/或成像内窥镜460提供/提供侧倾运动。
作为代表性示例,图13C提供了穿过坞站500的部分的横截面前视图,坞站500被配置用于承载一组托架或鼓结构520a-c,其可旋转地联接到对应的侧倾运动致动器/马达525a,b和/或精确盘,辊或与其相关联的齿轮,该侧倾运动可单独地提供给每个致动组件400a,b和成像内窥镜460。在所示的实施例中,第一支架520a承载第一平移机构510a(例如,线性致动器),其被配置用于选择性地提供冲击位移/近端-远端平移到例如图4B所示的第一致动组件400a,所述第一仪器适配器710a包括与其对应的第一仪器适配器710a。更具体地,第一平移机构510a承载第一仪器输入适配器610a(及其致动器620),第一仪器输入适配器710a(及其致动接合结构720)以类似于先前所描述的方式可接合/接合到第一器械输出适配器610a。
所述第一支架520a可旋转地联接或接合第一侧倾运动致动器525a和可能的一组相关联的侧倾运动盘,滚轮和/或齿轮,通过该侧倾运动盘,滚轮和/或齿轮,第一支架520a可以在预定角度范围内精确地旋转,例如,+/-180度,以响应第一侧倾运动致动器525a的致动。第一支架520a的旋转轴线平行于沿第一致动组件400a可提供冲击位移的轴线以及第一致动组件400a的外部套筒402与第一器械接头710a接合的轴线。
类似地,第二支架520b承载第二平移机构520b,其被配置用于选择性地将冲击位移/近端-远端平移提供给如图4C所示的第二致动组件400b,第二制动组件400b包括与其对应的第二仪器适配器710b。更具体地,所述第二平移机构510b承载第二仪器输出适配器610b(及其致动器620),第二仪器输入适配器710b(及其致动接合结构720)可以以上述相同或相似的方式与其可结合/结合。所述第二托架520b可旋转地联接或接合第二侧倾运动致动器525b以及可能的一组相关联的侧倾运动盘,滚轮和/或齿轮,通过这些滚轮运动盘,滚轮和/或齿轮,第二托架520b可以与上述相同或类似的方式在预定的角度范围(如,+/-180度)精确的旋转。所述第二支架520b的旋转轴线平行于沿其可提供冲击位移至第二致动组件400b的轴线,以及沿其第二致动组件400b的外套筒402与第二仪器适配器710b接合的轴线。
最后,第三支架520c承载第三平移机构510c,其被配置用于向成像内窥镜460提供冲击位移/近端-远端平移,例如排除或省略腱或其他类型的内部控制元件的成像内窥镜460以控制或提供升沉、摇摆和/或俯仰运动。成像内窥镜460的近端可以耦合到成像平移适配器472,成像平移适配器472可拆卸地与第三平移机构510c接合或接合,并且通过该成像内窥镜460电子和/或光学元件可耦合/被耦合到成像子系统210。第三支架520c可旋转地联接或接合第三侧倾运动致动器525c和可能的一组相关联的侧倾运动盘,滚子和/或齿轮,通过这些滚动运动盘,滚子和/或齿轮,第三支架520c可以在预定角度范围+/-180度),以与上述相同或类似的方式,精确的旋转。所述第二支架520b的旋转轴线平行于沿其可提供冲击位移至第二致动组件400b的轴线,以及沿其第二致动组件400b的外套筒402与第二仪器适配器710b接合的轴线。
根据实施例细节,第一,第二和第三侧倾运动致动器525a-c可以响应于由主系统100产生的控制信号和/或由运输内窥镜主体310携带的一组控制而单独地致动。
腱预拉伸/再拉紧的代表性方面
图14A示出了每个DOF配置的代表性单个致动器/电动机,以及可以与其相关联的潜在的类似反弹的效应。图14B示出了根据本公开的实施例的每DOF配置的代表性双致动器/电机。如图14B所示,当使用两个致动器/马达来控制每个机器人手臂/末端执行器DOF时,可以减少(例如,显著减少)不期望/不希望的腱松弛和类似反弹的效应。
每个腱存在于相应的护套内。适当且精确的腱预拉伸确保在内窥镜手术期间能够以更精确和可重复的方式控制腱。在各种实施例中,护套展现出线圈结构(例如,螺旋线圈结构),因此护套具有弹簧或类似弹簧的性质。在不知道腱及其周围护套沿其延伸的路径的曲折度的情况下,不能可靠地预测腱和其相应护套之间的相互作用(例如,由于鞘摩擦)。因此,任何给定的腱在即将开始内窥镜手术之前受到的张力取决于腱和其相应护套为了执行手术而沿其路线的弯曲度。
与早期的主-从柔性机器人内窥镜检查系统不同,根据本公开的实施例的系统不需要从致动组件制造向前的时间建立和保持精确的腱张力。相反,在各种实施例中,初始最小可接受腱预张力水平或范围可以作为制造致动器组件400的一部分来建立(例如,取决于腱长度,大约为1.0-30.0N),并且精确的腱预张紧或再张紧可以通过在执行内窥镜程序之前调整致动器/电机位置的方式产生。
根据实施例细节,通过包括应用固定或预定的电动机参数(例如,扭矩参数)的固定预张紧技术或者包括动态地确定电动机扭矩参数的主动/动态预张紧技术,可以发生腱预张紧,使得在开始内窥镜手术之前或者可能在内窥镜手术期间,可以向腱施加正确或大致正确的张力量。
图15是示出根据本公开的实施例的代表性离线/在线固定预张紧技术,过程或过程的部分的图示。该过程可以“离线”进行,例如在临床程序之前和OT/OR之外;或“在线”,例如在致动组件400被插入到柔性细长轴312中之后的OT/OR中,并且机器人手臂410a,b和末端执行器420a,b在紧接在内窥镜检查程序之前被设置在其远端。
在若干实施例中,对于由致动器A和致动器B限定的一对给定的致动器对620,其通过一对腱(例如,腱A对应的制动器A,腱B对应的制动器B)来控制所选机器人手臂410a/410b及其末端执行器420a/420b的特定自由度,该固定的预张紧技术涉及以下动作、操作或步骤的顺序:
1.将末端执行器420a/420b的远端移离远离制动器B的机械极限。
2.关闭致动器B并开始监测对应的致动器B(例如,致动器B的编码器)的位置传感器。
3.向制动器A施加扭矩,逐渐增大施加到制动器A的扭矩,直到制动器B的位置传感器指示制动器B的位置正在变化。
4.记录制动器A的施加扭矩,如有必要,减去制动器B的静摩擦。
5.释放两个腱上的张力(即肌腱A和B)。
6.重复步骤1-5一次或多次(例如,2-10次或更多次),并获取致动器A的平均记录的施加扭矩的一半以确定或限定致动器A的预张紧扭矩参数。
7.相应地对制动器B重复步骤1-6,同时制动器A关闭。
8.在确定致动器A和致动器B的预张紧扭矩参数之后,释放两个腱(例如,腱A和B)上的张力,并且使用计算出的致动器A的预张紧扭矩参数将扭矩施加到致动器A,并且使用计算的用于致动器B的预张紧扭矩参数将扭矩施加到致动器B。
在一个实施例中,所述离线固定预张紧技术包括在各种代表性弯曲度配置下运行初步实验;测量对应于这种代表性腱/鞘弯曲度配置的致动器/电机扭矩值;对应于一个或多个弯曲度配置计算出测量的扭矩值的平均值;及存储(例如,在存储器中或在数据存储装置上)对应于特定弯曲度配置的一组或多组平均扭矩值。根据所考虑的内窥镜检查程序的性质以及与其相关的预期的腱/鞘曲折度,可以得到(例如,从存储器或数据存储介质)适当的一组平均扭矩值,并且通过制动器/马达620的方式将其应用于致动组件400内的腱,致动组件400在内窥镜程序开始之前被联接到致动器/马达620。这种技术也可以在线或在运行中,例如在即将进行内窥镜手术之前应用。在线情况下,路径的曲折已经设置,因此预张紧针对该特定路径被优化。
图16A是根据本公开的实施例的主动预张紧/再张紧技术,过程或过程的部分的图示,且图16B是致动器/电机位置和与其对应的扭矩的代表图。主动预张紧技术包括确定不松弛的转变点,例如通过计算测量的张力分布或曲线的第一和/或二阶导数。对于给定的肌腱,可以实时自动识别不松弛的过渡点,并且可以对腱施加适当的预拉伸或者拉紧。所述主动预张紧/再张紧技术可以在致动组件400插入到柔性细长轴312中之后在OT/OR中执行,机器人手臂410a,b和末端执行器420a,b设置在其远端,在内窥镜检查程序之前;或在内窥镜检查过程中。施加正确的张力量对于确保有效的近端到远端力传递是重要的。如果施加的张力太小,则存在腱松弛,这可产生反冲效应。如果施加的张力太大,则增加了腱和护套之间的摩擦,这也可以产生反冲效应。
在一些实施例中,对于由致动器A和致动器B限定的一对给定致动器对620,其通过一对腱(例如,腱A对应制动器A,腱B对应制动器B)来控制所选机器人手臂410a/410b及其末端执行器420a/420b的特定DOF,所述主动预张紧技术包括以下的动作序列,操作或步骤:
1.将末端执行器420a/420b的远侧末端移离其机械限制。
2.释放两个腱(即腱A和B)上的张力并在其中产生松弛。
3.同时向致动器A和致动器B施加扭矩,以同样的速度拉动两个腱(即腱A和B),同时监测致动器A的位置和扭矩以及致动器B的位置和扭矩。
4.基于传感器数据,例如通过计算所监测的位置和/或致动器A和致动器B的扭矩的第一和/或二阶导数,识别致动器A和致动器B中的每一个的不松弛转变点。
5.同时(i)通过以对应于或由为致动器A确定的不松弛转变点限定的扭矩水平向致动器A施加扭矩来建立腱A的预张力,以及(ii)通过以对应于或由为致动器B确定的不松弛转变点限定的扭矩水平向致动器B施加扭矩来建立腱B的预张力。
所述主动预张紧过程可以重复多次(例如,2-10次或更多次),以便以容易被相关领域的普通技术人员理解的方式获得用于致动器A的平均无松弛过渡点和致动器B的平均无松弛过渡点。
图16C-16F是分别指示在执行图16A的主动预张紧技术期间的时间特定致动器/电动机对的第一致动器/电动机(例如,电动机A)的测量的电动机位置,测量的电动机速度,测量的电动机扭矩和测量的电动机扭矩的一阶导数的曲线图或曲线。图16G-16J是分别指示在执行图16A的主动预张紧技术期间的时间所述致动器/电动机对的第二致动器/电动机(例如,电动机B)的测量的电动机位置,测量的电动机速度,测量的电动机扭矩和测量的电动机扭矩的一阶导数的曲线图或曲线。在两组图中,根据需要对信号进行归一化和/或滤波以有效地处理数据。
对于电动机A,不松弛转变点出现在T=2.0,对应于减小的电动机A速度和产生相应的位置误差。这从测量的电动机扭矩和测量的电动机扭矩的一阶导数的曲线图显而易见。对于电机B,不松弛转变点发生在T=1.7。对于电动机A和电动机B,可以从测量值序列或其曲线图中识别类似或相似的特征。在图16C-16F中,T=3.9处;及在图16G-16J中,T=3.5处发生大的转变。这种大的转变是由于饱和电动机扭矩,且与每个致动器/电动机的不松弛转变点无关。每个不松弛转变点可以在程序指令控制下自动识别,例如通过处理单元执行与信号处理相关联的一个或多个算法(例如,对应于存储在存储器或其他计算机可读介质中的程序指令集),统计分析和/或机器学习等。可以多次执行一个或多个这样的算法以更准确地识别不松弛转变点。
代表性的基于滑轮的滚动接头元件和无卷曲腱锚定
在一些实施例中,机器人手臂410可以包括滚动接头或滚动接头原件,机器人手臂的一个或多个部分可以围绕滚动接头/滚动接头原件的中心或纵向轴线旋转或滚动。在滚动接头/滚动接头原件中,期望能够减少或最小化由于与滚动接头/接头原件的腱致动相关联的摩擦/磨损引起的腱磨损。在各种实施例中,例如对应于外科手术的那些,进一步期望最小化由滚动接头/滚动接头原件占据的空间量。
机器人手术器械的某些轴具有尺寸限制,这些尺寸限制不利于或阻止使用常规/传统的腱卷曲端接件来将腱锚定到致动元件。在根据本公开的一些实施例中,滚动接头/滚动接头原件排除了用于将腱锚定到滚动接头/滚动接头原件的常规/传统腱卷曲端接件。相反,根据本公开的实施例的诸如滚动接头/滚动接头原件的腱致动元件可以包括无卷曲的腱锚固结构,其通过摩擦力提供腱锚固,沿着(a)绕组或弯曲路径或通道,腱束通过其行进,和/或(b)通过致动元件本身的厚度(例如,从致动元件的第一或外侧,进入并通过致动元件的厚度到致动元件的第二或内侧,并且通过致动元件的厚度返回到致动元件的第一/外侧)。
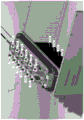
图17和18是示出根据本公开的实施例的无卷曲的基于滑轮的滚动接头或滚动接头元件900的部分的示意图,其可以减少或最小化由摩擦/磨损引起的腱磨损,及最小化滚动接头/滚动接头元件900的操作所需的空间体积。在一个实施例中,所述滚动接头元件900包括具有穿过其中心或纵向轴线的筒或筒结构,鼓或鼓结构910;用于承载鼓910的一组套环920a,b;以及多个滑轮930a,b,诸如设置在鼓轮910的外表面上方的顺时针致动滑轮930a和逆时针致动滑轮430b,顺时针致动腱405a和逆时针致动腱405b可围绕所述多个滑轮930a,滚动接头原件900可以相应地围绕其中心/纵向轴线在顺时针或逆时针方向上旋转。所述滑轮930可以通过一组臂构件(未示出)支撑离开鼓910的外表面,所述一组臂构件以相关领域的普通技术人员容易理解的方式接收对应于每个滑轮930的中心轴932a,b,并且其在第一套环920a和第二套环920b之间延伸。所述滚筒910的外表面是光滑的,非研磨的,抛光的和/或润滑的表面;并且每个套环920a,b的内表面是低摩擦表面。
图18示出了根据本公开的实施例的无卷曲的腱锚元件1000。在一个实施例中,所述无卷曲的腱锚元件1000可由诸如滚动接头鼓910的给定致动元件承载或形成,并且包括至少一个Ω形或U形段,其提供相应的Ω形和/或U形通道,过道或槽,给定的腱405可以通过该通道,过道或槽。根据本公开的实施例的无卷曲的腱锚元件1000,例如图17所示的Ω形无卷曲腱锚元件1000,包括多弯曲/多弯曲,缠绕和/或曲折的腱路径,其响应增加或改变的腱张力提供足够的摩擦点,用于防止腱滑动。也就是说,根据本公开的实施例的无卷曲的腱锚元件呈现出比施加的腱致动力充分或更高的总静态摩擦水平,以避免腱致动期间的腱滑动,并且在没有或不存在常规的腱卷曲元件的情况下,腱405被有效地锚固就位。在某些实施例中,无卷曲的腱锚元件1000可另外包括一个或多个区域,部分或长度,其中粘合剂将肌腱405的外表面固定到腱锚元件的内表面中或沿着该区域。
除此之外或作为前述的替代方案,无卷曲的腱锚元件可以包括通过致动元件的多个开口或“孔眼”,给定腱405可以穿过该开口或“孔眼",从而该腱405设置于或沿着/跨过被致动元件的外表面/侧面和被致动元件的内表面。
本公开的特定实施例的方面解决与退出主从柔性机器人内窥镜系统和装置相关联的至少一个方面,问题,限制和/或缺点。虽然在本公开中已经描述了与某些实施例相关联的特征,方面和/或优点,但是其它实施例也可以展示这些特征,方面和/或优点,并且并非所有实施例都需要展现这样的特征,方面和/优点以落入本公开的范围内。本领域普通技术人员将理解,上述公开的系统,组件,过程或其替代方案中的几个可以期望地组合到其他不同的系统,组件,过程和/或应用中。另外,在本公开的范围内,本领域普通技术人员公开的各种实施例进行各种修改,变更和/或改进。
Claims (6)
1.一种主-从内窥镜系统,包括:
内窥镜,其具有主体,柔性细长轴从所述主体延伸,所述柔性细长轴跨越其近端和远端之间的长度,所述柔性细长轴沿所述柔性细长轴的长度方向有一组通道设置于所述柔性细长轴内,所述一组通道包括第一通道和第二通道;
一组机械驱动制动组件,所述一组机械驱动制动组件能够插入所述柔性细长轴的所述一组通道内,所述一组机械驱动制动组件中的每一个包括:
机器人手臂,其具有与所述机器人手臂相连的机械驱动的末端执行器;
多个腱,其联接到所述机器人手臂并且被配置为根据大于1的预定数量的自由度(DOF)控制所述机器人手臂和所述末端执行器的运动; 及
围绕所述多个腱的外套筒;
一组第一仪器适配器,所述一组第一仪器适配器中的每一个对应于所述一组机械驱动制动组件中的一个并且联接到所述一组机械驱动制动组件中的每一个的腱,所述一组第一仪器适配器可联接到一组机械元件,用于选择性地将所述一组机械驱动制动组件中的每一个的多个腱与多组机器人手臂/末端执行器操纵致动器中的一组联接;和
平移机构,其构造成沿着所述柔性细长轴的长度的预定分数独立地平移所述一组机械驱动制动组件中的每一个,以实现所述机械驱动制动组件中的该一个的冲击位移,所述平移机构包括以下之一:
(a)由所述一组机械驱动制动组件中的每一个的所述外套筒承载的轴环;和
转换单元,包括:
接收器,其被构造成配合地接收所述一组机械驱动制动组件中的每一个的外套筒并且配合地接合与其对应的轴环;和
线性致动器,其对应于每个接收器并且构造成沿着所述柔性细长轴的长度的预定分数选择性地平移所述接收器,以实现沿着所述柔性细长轴的长度的预定分数配合地联接到所述接收器的所述一组机械驱动制动组件中的多个机械驱动制动组件的冲击位移;
(b)一组第二仪器适配器,其中,所述一组第二仪器适配器中的每一个与所述一组第一仪器适配器中的对应一个可配合地接合,用于将对应于所述一组第一仪器适配器中的一个的所述一组机械驱动制动组件中的一个的腱与所述多组机器人手臂/末端执行器操纵致动器中的对应一组联接;和
平移单元,其构造成承载所述一组第一仪器适配器中的每一个以及与所述一组第一仪器适配器可匹配地接合的所述一组第二仪器适配器中的该一个,并且使配合接合的所述一组第一仪器适配器中的每一个和所述一组第二仪器适配器中的该一个移位,以实现该组单独的机械驱动制动组件中的多个机械驱动制动组件沿着柔性细长轴的长度的预定分数的冲击位移;以及
(c)平移单元,其被配置用于移动所述多组机器人手臂/末端执行器操纵致动器中的每一组和联接到所述多组机器人手臂/末端执行器操纵致动器上的所述一组第一器械适配器中的每一个,以实现该组单独的机械驱动制动组件中的一个沿着柔性细长轴长度的预定分数的冲击位移,所述一组第一仪器适配器中的每一个具有鼓结构、输入轴和围绕所述输入轴周向设置的弹性偏压元件。
2.如权利要求1所述的系统,其中,所述一组第二仪器适配器中的每一个通过在系绳中具有多个腱的系绳而联接到所述多组机器人手臂/末端执行器操纵致动器中的一组。
3.如权利要求1或2所述的系统,还包括坞站,所述内窥镜的主体的一部分可拆卸地接合到所述坞站,其中,所述平移机构由所述坞站承载。
4.如权利要求3所述的系统,还包括携带所述坞站的患者侧车。
5.如权利要求1所述的系统,还包括携带所述平移机构的一组托架,其中,该一组托架中的每个托架对应于所述一组机械驱动制动组件中的单独一个,并且所述一组托架中的每个托架联接到滚动运动致动器,其被配置用于围绕滚动轴线单独地旋转托架及所述一组机械驱动制动组件中的对应一个,以向所述一组机械驱动制动组件中的该一个的机器人手臂和机械驱动末端执行器提供滚动运动。
6.如权利要求5所述的系统,还包括坞站,所述内窥镜的主体的一部分可拆卸地接合到所述坞站,其中,所述坞站承载所述平移机构和所述一组托架。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201461955232P | 2014-03-19 | 2014-03-19 | |
| US61/955,232 | 2014-03-19 | ||
| CN201580024954.9A CN106455916A (zh) | 2014-03-19 | 2015-03-19 | 主‑从柔性机器人内窥镜系统 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201580024954.9A Division CN106455916A (zh) | 2014-03-19 | 2015-03-19 | 主‑从柔性机器人内窥镜系统 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN108968890A CN108968890A (zh) | 2018-12-11 |
| CN108968890B true CN108968890B (zh) | 2021-10-12 |
Family
ID=54145078
Family Applications (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201810663145.8A Pending CN108836233A (zh) | 2014-03-19 | 2015-03-19 | 主-从柔性机器人内窥镜系统 |
| CN201810664294.6A Expired - Fee Related CN108836234B (zh) | 2014-03-19 | 2015-03-19 | 主-从柔性机器人内窥镜系统 |
| CN201580024954.9A Pending CN106455916A (zh) | 2014-03-19 | 2015-03-19 | 主‑从柔性机器人内窥镜系统 |
| CN201810433861.7A Expired - Fee Related CN108968890B (zh) | 2014-03-19 | 2015-03-19 | 主-从柔性机器人内窥镜系统 |
| CN201810433833.5A Expired - Fee Related CN108968889B (zh) | 2014-03-19 | 2015-03-19 | 主-从柔性机器人内窥镜系统 |
Family Applications Before (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201810663145.8A Pending CN108836233A (zh) | 2014-03-19 | 2015-03-19 | 主-从柔性机器人内窥镜系统 |
| CN201810664294.6A Expired - Fee Related CN108836234B (zh) | 2014-03-19 | 2015-03-19 | 主-从柔性机器人内窥镜系统 |
| CN201580024954.9A Pending CN106455916A (zh) | 2014-03-19 | 2015-03-19 | 主‑从柔性机器人内窥镜系统 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201810433833.5A Expired - Fee Related CN108968889B (zh) | 2014-03-19 | 2015-03-19 | 主-从柔性机器人内窥镜系统 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US20170127911A1 (zh) |
| EP (1) | EP3119263A4 (zh) |
| JP (7) | JP2017515615A (zh) |
| CN (5) | CN108836233A (zh) |
| SG (1) | SG11201607930TA (zh) |
| WO (1) | WO2015142290A1 (zh) |
Families Citing this family (52)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9339342B2 (en) | 2008-09-30 | 2016-05-17 | Intuitive Surgical Operations, Inc. | Instrument interface |
| US9259274B2 (en) | 2008-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Passive preload and capstan drive for surgical instruments |
| KR20230053731A (ko) | 2013-08-15 | 2023-04-21 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 예압형 수술 기구 인터페이스 |
| WO2015023840A1 (en) | 2013-08-15 | 2015-02-19 | Intuitive Surgical Operations, Inc. | Instrument sterile adapter drive interface |
| KR102313228B1 (ko) | 2013-08-15 | 2021-10-18 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 기구 살균 어댑터에 대한 액추에이터 인터페이스 |
| US10076348B2 (en) | 2013-08-15 | 2018-09-18 | Intuitive Surgical Operations, Inc. | Rotary input for lever actuation |
| JP6719376B2 (ja) | 2013-08-15 | 2020-07-08 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | ロボット器具の被駆動要素 |
| US10550918B2 (en) | 2013-08-15 | 2020-02-04 | Intuitive Surgical Operations, Inc. | Lever actuated gimbal plate |
| EP3597135B1 (en) | 2013-08-15 | 2021-12-15 | Intuitive Surgical Operations, Inc. | Variable instrument preload mechanism controller |
| US10271911B2 (en) | 2013-08-15 | 2019-04-30 | Intuitive Surgical Operations, Inc. | Instrument sterile adapter drive features |
| CN111658180A (zh) | 2014-08-15 | 2020-09-15 | 直观外科手术操作公司 | 具有可变进入引导器配置的外科手术系统 |
| US10639108B2 (en) | 2015-10-30 | 2020-05-05 | Auris Health, Inc. | Process for percutaneous operations |
| US9955986B2 (en) | 2015-10-30 | 2018-05-01 | Auris Surgical Robotics, Inc. | Basket apparatus |
| US9949749B2 (en) | 2015-10-30 | 2018-04-24 | Auris Surgical Robotics, Inc. | Object capture with a basket |
| US11504144B2 (en) | 2016-02-05 | 2022-11-22 | Board Of Regents Of The University Of Texas System | Surgical apparatus |
| US10960182B2 (en) | 2016-02-05 | 2021-03-30 | Board Of Regents Of The University Of Texas System | Steerable intra-luminal medical device |
| CN109496135B (zh) * | 2016-06-01 | 2021-10-26 | 恩达马斯特有限公司 | 内窥镜检查系统部件 |
| US11007024B2 (en) | 2016-07-14 | 2021-05-18 | Intuitive Surgical Operations, Inc. | Geared grip actuation for medical instruments |
| KR102543919B1 (ko) | 2016-07-14 | 2023-06-16 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 다중 케이블 의료 기기 |
| US20190231451A1 (en) | 2016-07-14 | 2019-08-01 | Intuitive Surgical Operations, Inc. | Geared roll drive for medical instrument |
| CN109414300B (zh) | 2016-07-14 | 2021-11-09 | 直观外科手术操作公司 | 器械冲洗系统 |
| US11890070B2 (en) | 2016-07-14 | 2024-02-06 | Intuitive Surgical Operations, Inc. | Instrument release |
| CN106175849B (zh) * | 2016-08-31 | 2019-03-01 | 北京术锐技术有限公司 | 一种基于柔性手术工具的单孔腔镜手术系统 |
| EP3541315A4 (en) | 2016-11-21 | 2020-07-01 | Intuitive Surgical Operations Inc. | CABLE LENGTH PRESERVING MEDICAL INSTRUMENT |
| US11154373B2 (en) | 2017-02-08 | 2021-10-26 | Intuitive Surgical Operations, Inc. | Control of computer-assisted tele-operated systems |
| US10357321B2 (en) | 2017-02-24 | 2019-07-23 | Intuitive Surgical Operations, Inc. | Splayed cable guide for a medical instrument |
| IT201700041980A1 (it) * | 2017-04-14 | 2018-10-14 | Medical Microinstruments Spa | Assieme robotico per microchirurgia |
| US11026758B2 (en) | 2017-06-28 | 2021-06-08 | Auris Health, Inc. | Medical robotics systems implementing axis constraints during actuation of one or more motorized joints |
| JP7160904B2 (ja) | 2017-09-08 | 2022-10-25 | コヴィディエン リミテッド パートナーシップ | ロボット手術システム用高精度機器制御モード |
| US11540889B2 (en) | 2017-11-10 | 2023-01-03 | Intuitive Surgical Operations, Inc. | Tension control in actuation of jointed instruments |
| US10271964B1 (en) * | 2018-01-26 | 2019-04-30 | Allosource | System and methods of use for preparing and testing pre-sutured tendon constructs |
| US11497567B2 (en) | 2018-02-08 | 2022-11-15 | Intuitive Surgical Operations, Inc. | Jointed control platform |
| US11118661B2 (en) | 2018-02-12 | 2021-09-14 | Intuitive Surgical Operations, Inc. | Instrument transmission converting roll to linear actuation |
| CN108451608B (zh) * | 2018-05-02 | 2019-12-24 | 中国人民解放军陆军军医大学第一附属医院 | 腹腔镜腔内镜头清洁穿刺器 |
| CN109567927B (zh) * | 2018-11-22 | 2021-06-29 | 清华大学 | 一种腔内操作工具 |
| WO2020156414A1 (en) * | 2019-01-31 | 2020-08-06 | The University Of Hong Kong | A compact dental robotic system |
| JP7329059B2 (ja) * | 2019-02-22 | 2023-08-17 | ダブリュ.エル.ゴア アンド アソシエイツ,インコーポレイティド | 作動ライン格納システム及び方法 |
| KR102281120B1 (ko) * | 2019-04-10 | 2021-07-26 | 주식회사 이지엔도서지컬 | 내시경 모듈 및 이를 포함하는 모듈형 내시경 장치 |
| US11109928B2 (en) | 2019-06-28 | 2021-09-07 | Auris Health, Inc. | Medical instruments including wrists with hybrid redirect surfaces |
| US11896330B2 (en) | 2019-08-15 | 2024-02-13 | Auris Health, Inc. | Robotic medical system having multiple medical instruments |
| GB2586998B (en) * | 2019-09-11 | 2022-07-13 | Prec Robotics Limited | A driver module |
| US11439419B2 (en) | 2019-12-31 | 2022-09-13 | Auris Health, Inc. | Advanced basket drive mode |
| JP7370007B2 (ja) | 2020-02-21 | 2023-10-27 | 国立大学法人 長崎大学 | 内視鏡操作支援システム及び内視鏡システム |
| JP7401075B2 (ja) * | 2020-06-05 | 2023-12-19 | 学校法人産業医科大学 | 内視鏡操作システム |
| WO2022099981A1 (zh) * | 2020-11-13 | 2022-05-19 | 北京术锐技术有限公司 | 连接适配器、连接组件和手术机器人系统 |
| USD1022197S1 (en) | 2020-11-19 | 2024-04-09 | Auris Health, Inc. | Endoscope |
| KR102378015B1 (ko) * | 2021-05-28 | 2022-03-24 | 주식회사 엔도로보틱스 | 텐던-쉬스 구동 장치 및 로봇팔 구동 장치 |
| DE102021114429A1 (de) | 2021-06-04 | 2022-12-08 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Robotersystem für minimalinvasive Chirurgie |
| IT202100015902A1 (it) * | 2021-06-17 | 2022-12-17 | Medical Microinstruments Inc | Metodo di preparazione alla teleoperazione in un sistema robotico teleoperato per chirurgia |
| IT202100015896A1 (it) * | 2021-06-17 | 2022-12-17 | Medical Microinstruments Inc | Metodo di condizionamento di uno strumento chirurgico di un sistema robotizzato per chirurgia, con cicli di pre-allungamento di tendini di trasmissione di movimenti |
| DE102022118388A1 (de) | 2022-07-22 | 2024-01-25 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Chirurgiesystem für die minimalinvasive robotische Chirurgie |
| CN115944397B (zh) * | 2023-03-10 | 2023-06-06 | 北京云力境安科技有限公司 | 一种内镜适配器 |
Family Cites Families (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3628743B2 (ja) * | 1995-02-22 | 2005-03-16 | オリンパス株式会社 | 医療用マニピュレータ |
| JP3610110B2 (ja) * | 1995-02-23 | 2005-01-12 | オリンパス株式会社 | 医療用マニピュレータ |
| US5710870A (en) * | 1995-09-07 | 1998-01-20 | California Institute Of Technology | Decoupled six degree-of-freedom robot manipulator |
| JP3578375B2 (ja) * | 1997-03-17 | 2004-10-20 | 技術研究組合医療福祉機器研究所 | ロボットアーム駆動装置およびロボットハンド |
| JP4503725B2 (ja) * | 1999-05-17 | 2010-07-14 | オリンパス株式会社 | 内視鏡治療装置 |
| EP1389958B1 (en) * | 2001-05-06 | 2008-10-29 | Stereotaxis, Inc. | System for advancing a catheter |
| JP4266582B2 (ja) * | 2002-07-15 | 2009-05-20 | オリンパス株式会社 | 外科手術用器具と外科手術システム |
| JP4755638B2 (ja) * | 2004-03-05 | 2011-08-24 | ハンセン メディカル,インク. | ロボットガイドカテーテルシステム |
| US8439828B2 (en) * | 2006-01-13 | 2013-05-14 | Olympus Medical Systems Corp. | Treatment endoscope |
| JP2007319954A (ja) * | 2006-05-30 | 2007-12-13 | Merry B:Kk | 可動軸駆動装置およびロボット装置 |
| CN104688281B (zh) * | 2006-06-13 | 2017-04-19 | 直观外科手术操作公司 | 微创手术系统 |
| JP4914735B2 (ja) * | 2007-02-14 | 2012-04-11 | オリンパスメディカルシステムズ株式会社 | 処置具の位置制御を行う内視鏡システム |
| JP5160549B2 (ja) * | 2007-09-11 | 2013-03-13 | オリンパス株式会社 | 内視鏡装置 |
| JP4580973B2 (ja) * | 2007-11-29 | 2010-11-17 | オリンパスメディカルシステムズ株式会社 | 処置具システム |
| JP2009195489A (ja) * | 2008-02-21 | 2009-09-03 | Olympus Medical Systems Corp | マニピュレータ操作システム |
| US8727966B2 (en) * | 2008-03-31 | 2014-05-20 | Intuitive Surgical Operations, Inc. | Endoscope with rotationally deployed arms |
| JP5336760B2 (ja) | 2008-05-01 | 2013-11-06 | オリンパスメディカルシステムズ株式会社 | 内視鏡システム |
| US20090281378A1 (en) * | 2008-05-09 | 2009-11-12 | Kazuo Banju | Medical system |
| US8343034B2 (en) * | 2008-05-13 | 2013-01-01 | Olympus Medical Systems Corp. | Electric medical instrument fitting which is attached to a medical instrument holding device |
| JP5452813B2 (ja) * | 2008-05-28 | 2014-03-26 | 国立大学法人東京工業大学 | 力覚提示機能を有する操縦システム |
| US8864652B2 (en) * | 2008-06-27 | 2014-10-21 | Intuitive Surgical Operations, Inc. | Medical robotic system providing computer generated auxiliary views of a camera instrument for controlling the positioning and orienting of its tip |
| JP5407036B2 (ja) * | 2008-09-02 | 2014-02-05 | オリンパスメディカルシステムズ株式会社 | 処置用内視鏡 |
| WO2010055745A1 (ja) * | 2008-11-14 | 2010-05-20 | オリンパスメディカルシステムズ株式会社 | 医療用システム |
| JP5323578B2 (ja) | 2009-04-28 | 2013-10-23 | テルモ株式会社 | 医療用ロボットシステム |
| WO2010138083A1 (en) * | 2009-05-29 | 2010-12-02 | Nanyang Technological University | Robotic system for flexible endoscopy |
| ES2388867B1 (es) * | 2009-10-27 | 2013-09-18 | Universitat Politècnica De Catalunya | Pinzas para cirugia laparoscópica mínimamente invasiva. |
| JP4781492B2 (ja) * | 2009-11-10 | 2011-09-28 | オリンパスメディカルシステムズ株式会社 | 多関節マニピュレータ装置及びそれを有する内視鏡システム |
| WO2011062079A1 (ja) * | 2009-11-18 | 2011-05-26 | オリンパスメディカルシステムズ株式会社 | 医療装置 |
| US8644988B2 (en) * | 2010-05-14 | 2014-02-04 | Intuitive Surgical Operations, Inc. | Drive force control in medical instrument providing position measurements |
| US8672837B2 (en) * | 2010-06-24 | 2014-03-18 | Hansen Medical, Inc. | Methods and devices for controlling a shapeable medical device |
| EP2532314B1 (en) * | 2010-10-28 | 2015-12-16 | Olympus Corporation | Treatment apparatus |
| US20130035537A1 (en) * | 2011-08-05 | 2013-02-07 | Wallace Daniel T | Robotic systems and methods for treating tissue |
| FR2987734B1 (fr) * | 2012-03-08 | 2014-04-11 | Univ Strasbourg | Dispositif d'instrumentation motorise et modulable et systeme d'endoscope comprenant un tel dispositif |
| JP5948168B2 (ja) * | 2012-07-03 | 2016-07-06 | オリンパス株式会社 | 医療用マニピュレータ |
| JP6140950B2 (ja) * | 2012-08-30 | 2017-06-07 | オリンパス株式会社 | 医療用システム |
-
2015
- 2015-03-19 US US15/127,397 patent/US20170127911A1/en not_active Abandoned
- 2015-03-19 JP JP2017500797A patent/JP2017515615A/ja active Pending
- 2015-03-19 CN CN201810663145.8A patent/CN108836233A/zh active Pending
- 2015-03-19 CN CN201810664294.6A patent/CN108836234B/zh not_active Expired - Fee Related
- 2015-03-19 CN CN201580024954.9A patent/CN106455916A/zh active Pending
- 2015-03-19 CN CN201810433861.7A patent/CN108968890B/zh not_active Expired - Fee Related
- 2015-03-19 EP EP15765801.4A patent/EP3119263A4/en not_active Withdrawn
- 2015-03-19 WO PCT/SG2015/050044 patent/WO2015142290A1/en active Application Filing
- 2015-03-19 CN CN201810433833.5A patent/CN108968889B/zh not_active Expired - Fee Related
- 2015-03-19 SG SG11201607930TA patent/SG11201607930TA/en unknown
-
2018
- 2018-12-20 US US16/228,634 patent/US20190191967A1/en not_active Abandoned
-
2019
- 2019-12-19 JP JP2019228849A patent/JP7019662B2/ja active Active
- 2019-12-19 JP JP2019228848A patent/JP7019661B2/ja active Active
- 2019-12-19 JP JP2019228850A patent/JP2020072935A/ja active Pending
-
2021
- 2021-11-29 JP JP2021193409A patent/JP2022050387A/ja active Pending
- 2021-11-29 JP JP2021193412A patent/JP2022033844A/ja active Pending
-
2022
- 2022-06-08 JP JP2022092981A patent/JP2022133289A/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| CN108968889A (zh) | 2018-12-11 |
| EP3119263A4 (en) | 2018-06-27 |
| WO2015142290A1 (en) | 2015-09-24 |
| US20190191967A1 (en) | 2019-06-27 |
| CN106455916A (zh) | 2017-02-22 |
| JP2022050387A (ja) | 2022-03-30 |
| SG11201607930TA (en) | 2016-12-29 |
| CN108836234B (zh) | 2021-02-05 |
| CN108836234A (zh) | 2018-11-20 |
| JP2020072935A (ja) | 2020-05-14 |
| JP2022133289A (ja) | 2022-09-13 |
| JP7019662B2 (ja) | 2022-02-15 |
| US20170127911A1 (en) | 2017-05-11 |
| CN108836233A (zh) | 2018-11-20 |
| CN108968889B (zh) | 2022-03-22 |
| JP2020075143A (ja) | 2020-05-21 |
| JP2022033844A (ja) | 2022-03-02 |
| EP3119263A1 (en) | 2017-01-25 |
| JP2020062418A (ja) | 2020-04-23 |
| CN108968890A (zh) | 2018-12-11 |
| JP2017515615A (ja) | 2017-06-15 |
| JP7019661B2 (ja) | 2022-02-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108968890B (zh) | 主-从柔性机器人内窥镜系统 | |
| US11871914B2 (en) | Operating self-antagonistic drives of medical instruments | |
| US11523732B2 (en) | Surgical device actuated using asymmetric spring system | |
| US20210228063A1 (en) | Methods and Apparatus to Shape Flexible Entry Guides for Minimally Invasive Surgery | |
| JP2017515615A5 (zh) | ||
| CN107613832B (zh) | 增强型柔性机器人内窥镜检查装置 | |
| JP2022068337A (ja) | 内視鏡用システムの構成要素 | |
| JP6894647B2 (ja) | 可撓性のある拡張ロボット内視鏡装置 | |
| KR102223768B1 (ko) | 내시경 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| TA01 | Transfer of patent application right | ||
| TA01 | Transfer of patent application right |
Effective date of registration: 20201110 Address after: Shinka ha Applicant after: Endomaster Pte. Ltd. Address before: No.2 wenletai, no.04-01, building 2, gangpan, Singapore Applicant before: Endomaster Pte. Ltd. Applicant before: TAG Heuer |
|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20211012 |