CN108401792B - 食用菌智能套袋机 - Google Patents
食用菌智能套袋机 Download PDFInfo
- Publication number
- CN108401792B CN108401792B CN201810173686.2A CN201810173686A CN108401792B CN 108401792 B CN108401792 B CN 108401792B CN 201810173686 A CN201810173686 A CN 201810173686A CN 108401792 B CN108401792 B CN 108401792B
- Authority
- CN
- China
- Prior art keywords
- lifting
- bag
- sucker
- cylinder
- supporting plates
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01G—HORTICULTURE; CULTIVATION OF VEGETABLES, FLOWERS, RICE, FRUIT, VINES, HOPS OR SEAWEED; FORESTRY; WATERING
- A01G18/00—Cultivation of mushrooms
- A01G18/20—Culture media, e.g. compost
- A01G18/22—Apparatus for the preparation of culture media, e.g. bottling devices
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Mycology (AREA)
- Environmental Sciences (AREA)
- Supplying Of Containers To The Packaging Station (AREA)
Abstract
本发明涉及一种食用菌智能套袋机,包括机架,所述机架上沿物料输送方向依次设置有制袋机构、升降张口机构、撑袋机构、升降接包机构、二次热封口机构和输送机构;所述制袋机构包括送料滚筒、导向滚筒、送膜滚筒、一次热封机构和切刀;所述升降张口机构设置在切刀出口位置,其包括第一升降机构和设置在升降机构上的上、下吸盘;所述撑袋机构包括一横向移动机构和设置该移动机构上的能开合的两块弧形撑板;所述下吸盘升至最高点时与切刀出口平齐,上下吸盘降至最低点时与两撑板的中心相对接。本装置结构简单,使用方便。
Description
技术领域
本发明涉及一种食用菌智能套袋机。
背景技术
目前食用菌的菌包已经实现了培养基自动套袋的机械化作业,但为了给菌包保湿,需要对打孔后的菌包进行二次套袋,将装有培养基的菌包再次套进一个菌袋内,然后进行封口作业;如果采用人工作业,效率及其低下,因此需要开发一款可以自动进行二次套袋的装置。
发明内容
本发明针对上述现有技术存在的问题做出改进,即本发明所要解决的技术问题是提供一种食用菌智能套袋机,能够快速自动实现对菌包进行二次套袋作业。
为了解决上述技术问题,本发明的技术方案是:一种食用菌智能套袋机,包括机架,所述机架上沿物料输送方向依次设置有制袋机构、升降张口机构、撑袋机构、升降接包机构、二次热封口机构和输送机构;所述制袋机构包括送料滚筒、导向滚筒、送膜滚筒、一次热封机构和切刀;所述升降张口机构设置在切刀出口位置,其包括第一升降机构和设置在升降机构上的上、下吸盘;所述撑袋机构包括一横向移动机构和设置该移动机构上的能开合的两块弧形撑板;所述下吸盘升至最高点时与切刀出口平齐,上下吸盘降至最低点时与两撑板的中心相对接,以使撑板沿横向移动机构移动至内端部时插入上下吸盘之间;所述升降接包机构包括第二升降机构和设置在升降机构上能转动合拢张开的两块弧形托板,所述托板升至最高点时与撑袋机构平齐,降至最低点时与二次封口机构平齐,所述二次封口机构设置在撑袋机构下方,所述输送机构设置在升降接包机构下方并将托板张开落下的菌包输送走。
进一步的,所述第一升降机构包括第一气缸和被该气缸驱使上下移动的缸座,所述下吸盘设置在缸座上,所述下吸盘上设置有辅助气缸,所述上吸盘设置在辅助气缸上并随该气缸上下移动。
进一步的,所述上、下吸盘均与一设置在机架上的负压风机相连通。
进一步的,所述撑袋机构包括一设置在横向移动机构上的箱体,所述箱体内上端设置有上导轨,内下端设置有下导轨,所述上、下导轨上分别设置有沿导轨移动的上、下齿条,所述箱体外设置有一伺服马达,所述伺服马达的输出端设置有一位于箱体内的中心齿轮,所述中心齿轮与上、下齿条均啮合,所述上齿条上设置有同步运动并穿出箱体的第一机械臂,所述下齿条上设置有同步运动并穿出箱体的第二机械臂,两弧形撑板分别相对的设置在第一、第二机械臂的端部上,以使伺服马达正转时,两撑板相向运动,伺服马达反转时,两撑板反向运动。
进一步的,所述第一、第二机械臂上还均设置有一固定气缸,所述固定气缸的活塞杆端部设置有压向撑板背面的压板。
进一步的,所述横向移动机构包括导向杆和驱动气缸,所述箱体在驱动气缸的作用下沿导向杆往复运动。
进一步的,所述伺服马达的输出端处还设置有精密行星减速机。
进一步的,所述第二升降机构底部设置有支撑板,所述支撑板前面上铰接有两相啮合的齿轮,两托板分别固设在两齿轮上并随之同步转动,所述支撑板背面设置有驱动一齿轮转动的摆动气缸。
进一步的,所述第二升降机构包括升降气缸和导向柱,所述支撑板上设置有套设在导向柱上的直线轴承。
进一步的,所述托板的端面为90°圆弧。
进一步的,所述摆动气缸的转动角度为0~180°。
进一步的,所述导向柱和直线轴承的数量均为两个。
进一步的,所述输送机构包括一传送带。
与现有技术相比,本发明具有以下有益效果:本装置能够实现自动制袋,并将打孔好的菌包送入该套袋内并封口,实现了菌包的自动二次套袋作业,结构简单,使用方便,节约了人力物力,提高生产效率。
下面结合附图和具体实施方式对本发明做进一步详细的说明。
附图说明
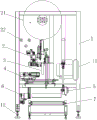
图1为本发明实施例的构造示意主视图。
图2为本发明实施例的构造示意侧视图。
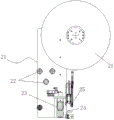
图3为本发明实施例中制袋机构的构造示意图。
图4为本发明实施例中升降张口机构的构造示意图。
图5为本发明实施例中撑袋机构的构造示意主视图。
图6为本发明实施例中撑袋机构的构造示意侧视图。
图7为本发明实施例中升降接包机构的构造示意主视图。
图8为本发明实施例中升降接包机构的构造示意侧视图。
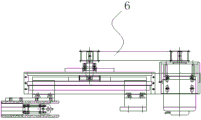
图9为本发明实施例中二次热封口机构的构造示意图。
图中:1-机架,11-负压风机,12-升降支脚,13-万向转轮,2-制袋机构,21-送料滚筒,22-导向滚筒,23-送膜滚筒,24-一次热封机构,25-切刀,3-升降张口机构,31-第一气缸,32-缸座,33-下吸盘,34-上吸盘,35-辅助气缸,36-风管,4-撑袋机构,40-横向移动机构,401-导向杆,41-箱体,411-伺服马达,42-上导轨,43-上齿条,44-下齿条,45-中心齿轮,46-第一机械臂,47-第二机械臂,48-撑板,49-固定气缸,5-升降接包机构,51-升降气缸,52-导向柱,53-直线轴承,54-支撑板,55-齿轮,56-托板,57-摆动气缸,6-二次热封口机构,7-输送机构。
具体实施方式
实施例一:如图1~9所示,一种食用菌智能套袋机,包括机架1,所述机架上沿物料输送方向依次设置有制袋机构2、升降张口机构3、撑袋机构4、升降接包机构5、二次热封口机构6和输送机构7;所述制袋机构包括送料滚筒21、导向滚筒22、送膜滚筒23、一次热封机构24和切刀25;所述升降张口机构设置在切刀出口位置,其包括第一升降机构和设置在升降机构上的上、下吸盘;所述撑袋机构包括一横向移动机构和设置该移动机构上的能开合的两块弧形撑板48;所述下吸盘升至最高点时与切刀出口平齐,上下吸盘降至最低点时与两撑板的中心相对接,以使撑板沿横向移动机构移动至内端部时插入上下吸盘之间;所述升降接包机构包括第二升降机构和设置在升降机构上能转动合拢张开的两块弧形托板,所述托板升至最高点时与撑袋机构平齐,降至最低点时与二次封口机构平齐,所述二次封口机构设置在撑袋机构下方,所述输送机构设置在升降接包机构下方并将托板张开落下的菌包输送走。
本实施例中,所述第一升降机构包括第一气缸31和被该气缸驱使上下移动的缸座32,所述下吸盘33设置在缸座上,所述下吸盘上设置有辅助气缸35,所述上吸盘34设置在辅助气缸上并随该气缸上下移动。
本实施例中,所述上、下吸盘均分别通过风管36与一设置在机架上的负压风机11相连通。
本实施例中,所述撑袋机构包括一设置在横向移动机构40上的箱体41,所述箱体内上端设置有上导轨42,内下端设置有下导轨,所述上、下导轨上分别设置有沿导轨移动的上、下齿条,所述箱体外设置有一伺服马达411,所述伺服马达的输出端设置有一位于箱体内的中心齿轮45,所述中心齿轮与上、下齿条均啮合,所述上齿条43上设置有同步运动并穿出箱体的第一机械臂46,所述下齿条44上设置有同步运动并穿出箱体的第二机械臂47,两弧形撑板48分别相对的设置在第一、第二机械臂的端部上,以使伺服马达正转时,两撑板相向运动,伺服马达反转时,两撑板反向运动。
本实施例中,所述第一、第二机械臂上还均设置有一固定气缸49,所述固定气缸的活塞杆端部设置有压向撑板背面的压板。
本实施例中,所述横向移动机构包括导向杆401和驱动气缸,所述箱体在驱动气缸的作用下沿导向杆往复运动。
本实施例中,所述伺服马达的输出端处还设置有精密行星减速机。
本实施例中,所述第二升降机构底部设置有支撑板54,所述支撑板前面上铰接有两相啮合的齿轮55,两托板56分别固设在两齿轮上并随之同步转动,所述支撑板背面设置有驱动一齿轮转动的摆动气缸57。
本实施例中,所述第二升降机构包括升降气缸51和导向柱52,所述支撑板上设置有套设在导向柱上的直线轴承53。
本实施例中,所述托板的端面为90°圆弧。
本实施例中,所述摆动气缸的转动角度为0~180°。
本实施例中,所述导向柱和直线轴承的数量均为两个。
本实施例中,所述输送机构包括一传送带。
本实施例中,所述机架底部设置有带制动的万向转轮13和升降支脚12。
使用时,筒状的塑料套缠绕在送料滚筒21上,塑料套依次绕过导向滚筒22后进入送膜滚筒23,两个送膜滚筒在驱动机构的驱使下转动,将塑料套往一次热封机构和切刀方向输送,此时下吸盘位于切刀出口处,一次热封机构先对塑料套一端热封口,当输送至预定长度后,切刀将塑料套切断,上吸盘下降,开启负压风机,上、下吸盘分别吸住塑料袋口上下端,上吸盘上升将塑料袋口张开;然后升降张口机构下降至撑袋机构等高处,升降接包机构的托板升至撑袋机构等高处,箱体沿横向移动机构移动,两撑板先合拢,然后两撑板插入袋口将袋口撑开,箱体复位,上下吸盘复位;固定气缸将压板推出压在撑板背部将袋口压紧,通过一送料装置将菌包送入套袋内,装有菌包的套袋落在托板上,菌包完全进入套袋内后,松开固定气缸,合拢撑板,升降接包机构的托板下降至二次热封口机构等高处,套袋的袋口自动落入二次热封口机构内进行热封口作业,待封口完毕后,二次热封口机构张开,托板在摆动气缸作业下转动张开,套袋和菌包落入下方的传送带被输送走。
以上所述仅为本发明的较佳实施例,凡依本发明申请专利范围所做的均等变化与修饰,皆应属本发明的涵盖范围。
Claims (9)
1.一种食用菌智能套袋机,其特征在于:包括机架,所述机架上沿物料输送方向依次设置有制袋机构、升降张口机构、撑袋机构、升降接包机构、二次热封口机构和输送机构;所述制袋机构包括送料滚筒、导向滚筒、送膜滚筒、一次热封机构和切刀;所述升降张口机构设置在切刀出口位置,其包括第一升降机构和设置在升降机构上的上、下吸盘;所述撑袋机构包括一横向移动机构和设置该移动机构上的能开合的两块弧形撑板;所述下吸盘升至最高点时与切刀出口平齐,上下吸盘降至最低点时与两撑板的中心相对接,以使撑板沿横向移动机构移动至内端部时插入上下吸盘之间;所述升降接包机构包括第二升降机构和设置在升降机构上能转动合拢张开的两块弧形托板,所述托板升至最高点时与撑袋机构平齐,降至最低点时与二次封口机构平齐,所述二次封口机构设置在撑袋机构下方,所述输送机构设置在升降接包机构下方并将托板张开落下的菌包输送走;所述撑袋机构包括一设置在横向移动机构上的箱体,所述箱体内上端设置有上导轨,内下端设置有下导轨,所述上、下导轨上分别设置有沿导轨移动的上、下齿条,所述箱体外设置有一伺服马达,所述伺服马达的输出端设置有一位于箱体内的中心齿轮,所述中心齿轮与上、下齿条均啮合,所述上齿条上设置有同步运动并穿出箱体的第一机械臂,所述下齿条上设置有同步运动并穿出箱体的第二机械臂,两弧形撑板分别相对的设置在第一、第二机械臂的端部上,以使伺服马达正转时,两撑板相向运动,伺服马达反转时,两撑板反向运动。
2.根据权利要求1所述的食用菌智能套袋机,其特征在于:所述第一升降机构包括第一气缸和被该气缸驱使上下移动的缸座,所述下吸盘设置在缸座上,所述下吸盘上设置有辅助气缸,所述上吸盘设置在辅助气缸上并随该气缸上下移动。
3.根据权利要求2所述的食用菌智能套袋机,其特征在于:所述上、下吸盘均与一设置在机架上的负压风机相连通。
4.根据权利要求1所述的食用菌智能套袋机,其特征在于:所述第一、第二机械臂上还均设置有一固定气缸,所述固定气缸的活塞杆端部设置有压向撑板背面的压板。
5.根据权利要求1所述的食用菌智能套袋机,其特征在于:所述横向移动机构包括导向杆和驱动气缸,所述箱体在驱动气缸的作用下沿导向杆往复运动。
6.根据权利要求1所述的食用菌智能套袋机,其特征在于:所述第二升降机构底部设置有支撑板,所述支撑板前面上铰接有两相啮合的齿轮,两托板分别固设在两齿轮上并随之同步转动,所述支撑板背面设置有驱动一齿轮转动的摆动气缸。
7.根据权利要求6所述的食用菌智能套袋机,其特征在于:所述第二升降机构包括升降气缸和导向柱,所述支撑板上设置有套设在导向柱上的直线轴承。
8.根据权利要求6所述的食用菌智能套袋机,其特征在于:所述托板的端面为90°圆弧。
9.根据权利要求1所述的食用菌智能套袋机,其特征在于:所述输送机构包括一传送带。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810173686.2A CN108401792B (zh) | 2018-03-02 | 2018-03-02 | 食用菌智能套袋机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810173686.2A CN108401792B (zh) | 2018-03-02 | 2018-03-02 | 食用菌智能套袋机 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN108401792A CN108401792A (zh) | 2018-08-17 |
| CN108401792B true CN108401792B (zh) | 2020-08-11 |
Family
ID=63129429
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201810173686.2A Active CN108401792B (zh) | 2018-03-02 | 2018-03-02 | 食用菌智能套袋机 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN108401792B (zh) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109089739A (zh) * | 2018-11-10 | 2018-12-28 | 连云港国鑫食用菌成套设备有限公司 | 一种食用菌菌棒自动套袋机及套袋方法 |
| CN109552682A (zh) * | 2018-11-26 | 2019-04-02 | 常州百利锂电智慧工厂有限公司 | 三边封抽真空在线粉末包装机及其工作方法 |
| CN113632685B (zh) * | 2021-08-24 | 2023-04-07 | 闽南师范大学 | 一种菌包的自动化扎口协同剪口装置及工艺 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104663255B (zh) * | 2015-03-31 | 2017-12-05 | 福建海源三维打印高科技有限公司 | 食用菌培养料的全自动套袋机 |
| CN104718992B (zh) * | 2015-03-31 | 2017-02-01 | 福建海源三维打印高科技有限公司 | 自动套袋机的供袋装置 |
| CN104996168B (zh) * | 2015-07-21 | 2017-09-22 | 姚通业 | 智能套袋装料机 |
| CN105815117B (zh) * | 2016-05-27 | 2018-11-13 | 李勇涛 | 卧式食用菌自动套袋机 |
| CN106973696A (zh) * | 2017-03-17 | 2017-07-25 | 福建海源三维打印高科技有限公司 | 一种菌棒自动双层套袋机及其控制方法 |
-
2018
- 2018-03-02 CN CN201810173686.2A patent/CN108401792B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN108401792A (zh) | 2018-08-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108401792B (zh) | 食用菌智能套袋机 | |
| CN111731545B (zh) | 一种成型包装盒自动化装填生产线 | |
| CN108419612B (zh) | 食用菌智能卧式打包机 | |
| CN109835560B (zh) | 一种袋装粉料的自动脱外包装机构 | |
| CN109132002A (zh) | 一种锂电池自动打包设备 | |
| CN111099071A (zh) | 营养土软钵自动装填一体机 | |
| CN210391635U (zh) | 一种食品包装盒自动封口装置 | |
| CN111392125A (zh) | 一种自动化管材包装机 | |
| CN109397750B (zh) | 一种方底薄膜袋生产设备 | |
| CN203473267U (zh) | 包装机 | |
| CN212638141U (zh) | 食品装袋设备 | |
| CN206969007U (zh) | 一种粮食灌装自动装袋装置 | |
| CN210063605U (zh) | 一种袋装粉料的自动脱外包装机构 | |
| CN206969088U (zh) | 一种粮食灌装自动取袋撑口装置 | |
| CN211544078U (zh) | 营养土软钵自动装填一体机 | |
| JPH01308707A (ja) | 角錐パック製造方法及び装置 | |
| CN107323751B (zh) | 一种套装式内外袋物料包装全自动生产线的内袋置入外袋装置 | |
| CN207191564U (zh) | 一种套装式内外袋物料包装全自动生产线的内袋置入外袋装置 | |
| CN207911577U (zh) | 食用菌智能套袋机 | |
| CN216916509U (zh) | 卧式给袋装袋封口一体机 | |
| CN210733428U (zh) | 一种收料快捷的纸杯机 | |
| CN219857921U (zh) | 一种套袋包装机 | |
| CN113291541B (zh) | 一种新型条状包装袋真空成形包装机 | |
| CN212023147U (zh) | 一种自动化管材包装机 | |
| CN214070946U (zh) | 全自动立式双筒食用菌装袋机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| PE01 | Entry into force of the registration of the contract for pledge of patent right | ||
| PE01 | Entry into force of the registration of the contract for pledge of patent right |
Denomination of invention: Edible mushroom intelligent bagging machine Effective date of registration: 20230103 Granted publication date: 20200811 Pledgee: Postal Savings Bank of China Limited Xiamen Tong'an District Sub-branch Pledgor: XIAMEN QIANDA AUTOMATION EQUIPMENT Ltd. Registration number: Y2022980029998 |