CN107589173B - 扶手的检查系统以及扶手的检查方法 - Google Patents
扶手的检查系统以及扶手的检查方法 Download PDFInfo
- Publication number
- CN107589173B CN107589173B CN201710447616.7A CN201710447616A CN107589173B CN 107589173 B CN107589173 B CN 107589173B CN 201710447616 A CN201710447616 A CN 201710447616A CN 107589173 B CN107589173 B CN 107589173B
- Authority
- CN
- China
- Prior art keywords
- signal
- handrail
- deterioration
- signal data
- determination
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Abstract
本发明提供一种扶手的检查系统以及扶手的检查方法,对由劣化引起的信号和由既定构造引起的信号进行区别,在劣化的初始阶段以高精度来检测由劣化引起的信号,并且可以简单地确定扶手中的劣化的位置。该扶手的检查系统具备磁传感器和数据处理装置,上述数据处理装置具有标记物识别部、既定构造识别部、根据标记物的信号的位置和既定构造的信号的位置将信号数据划分为多个范围的信号位置划分部、判定扶手的劣化的信号判定部以及显示该判定的结果的显示部,上述信号判定部根据对每一个划分出的上述范围所决定的判定基准来进行扶手的劣化的判定处理,上述显示部显示上述信号数据、上述判定的结果以及划分出的上述范围。
Description
技术领域
本发明涉及乘客输送机(自动扶梯以及自动人行道等)的扶手的检查系统以及扶手的检查方法。
背景技术
在乘客输送机中,乘客搭乘的梯级被环状(圆环状)连结而被旋转驱动。为了防止乘客跌倒,还设置有用于乘客手扶的扶手,并与梯级连动地旋转驱动。该扶手由多个部件构成。具体而言,扶手表面由树脂材料(聚氨酯、橡胶等)所形成的保护层(保护橡胶)构成,在保护层的内部设置有用于维持扶手的强度的称为抗拉体的部件。另外,在它的下面,设置有用于固定保护层的固定部以及在扶手的旋转驱动时在安装了扶手的边框的表面进行滑动的滑动部,其使用帆布等。
作为抗拉体,一般并排多条钢帘线而构成。如果该钢帘线劣化(断裂以及扭曲等),则扶手的强度降低,因此需要检查钢帘线是否是正常的状态(钢帘线的劣化的有无以及程度)。
在扶手内的钢帘线的老化的过程中,在初始阶段钢帘线在保护橡胶的内部发生扭曲或变形。如果该钢帘线的劣化进一步发展,则钢帘线会发生断裂。这些钢帘线的从扭曲、变形直到断裂的过程,大多根据外观等无法掌握其事实。断裂的钢帘线有时从保护橡胶冒出,成为事故、故障的原因。
因此,作为可以检测根据外观无法检测的扶手内的钢帘线的劣化的非破坏性分析手段,有X射线透射检查。通过X射线透射检查,可以直接调查劣化的部位以及程度。然而,环状连结的扶手又长又大,为了对扶手整体进行X射线透射检查,必须准备巨大的拍摄装置或进行很多次的拍摄,出于检查效率的观点是困难的。
因此,以往,为了不损伤扶手地更加简单地检测扶手内部的钢帘线的劣化,提出了对钢帘线进行励磁并检测从被磁化的钢帘线泄漏的漏磁通来检查钢帘线的劣化的基于磁性的扶手的检查装置以及检查方法。然而,如上所述,扶手被环状连接,因此钢帘线的接口无法从外部进行目视确认,在检查扶手时,无法正确地掌握开始以及结束的适当位置。用于确认这些诊断的开始、结束位置或劣化位置的检查需要较多的精力和时间。
针对像这样的课题,在专利文献1中,记载了具有如下特征的乘客输送机的移动扶手的损伤位置检测方法:在运行乘客输送机,使环绕其栏杆的周围的移动扶手与台阶同步进行环绕移动,通过靠近上述移动扶手配置的损伤检测装置测定从上述移动扶手的内部的钢制帘线泄漏出的漏磁通来检测上述钢制帘线的损伤位置的乘客输送机的移动扶手的损伤位置检测方法中,在上述移动扶手的外表面的任意位置安装磁体,通过上述损伤检测装置也检测来自该磁体的磁通,并将由此获得的检测信号作为用于识别上述移动扶手的基准位置的基准信号。根据专利文献1,可以准确地检测乘客输送机的移动扶手的钢制帘线的损伤位置,而且当漏磁通微弱时,也可以确认损伤检测装置是否正常工作。
然而,在现有的使用了磁传感器的扶手的检查中,在高精度地检测钢帘线的劣化的方面存在以下(1)~(3)的课题。
(1)噪音的影响
作为妨碍可靠地检测由钢帘线的劣化部分所引起的信号的主要原因,有测量信号中存在的噪音。对于测量信号中包含的噪音,针对信号强度弱的噪音,噪音除去处理有效,但是噪音是依赖于测量装置的噪音,噪音除去处理并不一定有效。
(2)既定构造的影响
在测量信号中,包含由于扶手的内部的既定构造(也表达为“内部构造”,为了便于制造,线缆原本不连续或扭曲的的部位)而被输出的信号。因此,存在很难以高精度来检测由劣化引起的信号的课题。在由劣化所引起的信号强度(峰值)与由既定构造引起的信号的强度相比明显较强的情况下,虽然可以区分由劣化所引起的信号和由既定构造所引起的信号并且可以与噪音一起对由既定构造所引起的信号进行除去处理,但是并不限定于由劣化引起的信号一定是比由既定构造所引起的信号充分强的信号。
(3)微弱信号的检测
进一步,如上所述,扶手的劣化是从钢帘线的扭曲开始,但是由于使用磁传感器所检测的扭曲引起的信号一般比由断线引起的信号更弱,因此存在很难检测劣化的初始阶段的课题。
如此,使用了磁传感器的扶手的劣化的高精度的检测困难的主要原因是,在检测信号中除了由劣化引起的信号,还包含由噪音、既定构造引起的信号,很难对它们例如简单地根据信号强度进行区分。上述专利文献1没有针对上述(1)~(3)的全部课题进行充分的讨论。
专利文献1:日本特开平10-218541号公报
发明内容
因此,鉴于以上的点,本发明的目的在于提供一种可以在乘客输送机的扶手的检查中,区分由扶手的劣化引起的信号和由扶手的既定构造引起的信号,在劣化的初始阶段以高精度来检测由劣化引起的信号,并且可以简单地确定扶手中的劣化的位置的乘客输送机的扶手检查系统以及乘客输送机的扶手检查方法。
本发明的一个方式,为了达到上述目的,在乘客输送机的扶手的检查系统中,具备:磁传感器,其以能够装卸的方式安装在扶手中,一边驱动扶手一边检测磁场的变化来获得信号数据;以及数据处理装置,其接收上述信号数据,来判定扶手的劣化的有无以及程度,上述数据处理装置具有:标记物识别部,其识别由预先设置在扶手的预定部位的标记物引起的信号;既定构造识别部,其识别由扶手中特有的构造引起的信号;信号位置划分部,其根据信号数据中的上述标记物的信号的位置和上述既定构造的信号的位置,将上述信号数据划分为多个范围;信号判定部,其根据上述信号数据来判定扶手的劣化;以及显示部,其显示该判定的结果,上述信号判定部根据对每一个划分出的上述范围所决定的判定基准来进行扶手的劣化的判定处理,上述显示部显示上述信号数据、上述判定的结果以及划分出的上述范围。
本发明的另一方式,为了达到上述目的,在乘客输送机的扶手的检查方法中,具有以下步骤:通过以能够装卸的方式安装在扶手中的磁传感器,一边驱动扶手一边检测磁场的变化来生成信号数据;在数据处理装置中接收使用上述磁传感器生成的所述信号数据,并判定扶手的劣化的有无以及程度,上述数据处理装置在上述信号数据中识别由预先设置在扶手的预定部位的标记物引起的信号和由扶手中特有的构造引起的信号,根据识别出的上述标记物的信号的位置和上述既定构造的信号的位置,将上述信号数据划分为多个范围,并根据对每一个划分出的上述范围所决定的判定基准来进行扶手的劣化的判定处理,并在显示装置中显示上述信号数据、上述判定的结果以及划分出的上述范围。
本发明的更加具体的结构记载于请求专利保护的范围中。
根据本发明,可以提供对由扶手的劣化引起的信号和由扶手的既定构造引起的信号进行区分,在劣化的初始阶段以高精度来检测由劣化引起的信号,并且可以简单地确定扶手中的劣化的位置的乘客输送机的扶手检查系统以及乘客输送机的扶手检查方法。
根据以下的实施方式的说明,上述以外的课题、结构以及效果会变得更清楚。
附图说明
图1是表示本发明所涉及的扶手检查系统的一个例子的示意图。
图2是表示实施例1所涉及的扶手检查系统的框图。
图3是表示实施例1所涉及的数据处理装置中的处理的流程的流程图。
图4(a)是表示扶手的一部分(图1的X部分)的俯视图。
图4(b)是表示图4(a)的A-A′线截面图。
图5是说明生成用于检查钢帘线的劣化的信号数据的原理的图。
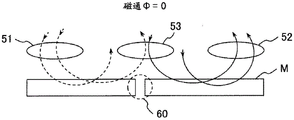
图6(a)是表示在图5中扶手中存在断裂时的与接收线圈交链的磁通的方向的图。
图6(b)是表示在图5中扶手中存在断裂时的与接收线圈交链的磁通的方向的图。
图6(c)是表示在图5中扶手中存在断裂时的与接收线圈交链的磁通的方向的图。
图7是表示实施例1所涉及的钢帘线的一部分的俯视图和对应于该一部分的信号数据的一个例子的图。
图8是表示对图7的信号数据进行了划分的各范围的图。
图9是表示显示在实施例1所涉及的扶手检查系统的显示部中的检查结果的一个例子的图。
图10是表示实施例2所涉及的扶手检查系统的框图。
图11是表示实施例2所涉及的数据处理装置中的处理的流程的流程图。
图12是表示显示在实施例2所涉及的扶手检查系统的显示部中的检查结果的一个例子的图。
符号说明
2…保护层、3…钢帘线、60…断裂部位、71…标记物、72、73…既定构造、74…断线、75…扭曲、100,100a,100b…扶手检查系统、101…磁传感器、102a,102b…数据处理装置、103…标记物识别部、104…既定构造识别部、105…信号位置划分部、106…信号判定部、107…显示部、110…扶手、901…信号比较部、902…检查数据服务器。
具体实施方式
以下,使用附图对本发明所涉及的乘客输送机的扶手的检查系统(以下,简称为“扶手检查系统”。)以及乘客输送机的扶手的检查方法(以下,简称为“扶手检查方法”。)的实施方式进行详细说明。
图1是表示本发明所涉及的扶手检查系统的一个例子的示意图。如图1所示,本发明所涉及的扶手检查系统100具备:磁传感器101,其可装卸地安装在乘客输送机的扶手110中,一边驱动扶手一边检测磁场的变化来生成信号数据;以及数据处理装置102,其接收由磁传感器101生成的信号,并判定劣化的有无以及程度。以下,针对在本发明中数据处理装置102的结构不同的2个实施例进行详细描述。
实施例1
图2是表示实施例1所涉及的扶手检查系统的框图。如图2所示,实施例1所涉及的扶手检查系统100a具有磁传感器101以及数据处理装置102a,数据处理装置102a具有标记物识别部103、既定构造识别部104、信号位置划分部105、信号判定部106以及显示部107。
图3是表示实施例1所涉及的数据处理装置中的处理的流程的流程图。以下,按照该图针对本发明所涉及的扶手检查系统的处理的流程来进行说明。扶手检查大致分为(I)由磁传感器所进行的信号数据生成处理和(II)由数据处理装置所进行的劣化检测处理。以下,分别针对各处理进行详细描述。
(I)由磁传感器所进行的信号数据生成处理
图4(a)是扶手的一部分(图1的X部分)的俯视图,图4(b)是图4(a)的A-A′线截面图。如图4(a)以及图4(b)所示,扶手110具有由聚氨酯、橡胶等的树脂构成的保护层2和内置在保护层2中的多根钢帘线3。另外,钢帘线3具有扶手110所特有的构造(既定构造)。针对既定构造,在后面进行描述。
如图3所示,数据处理装置102a从磁传感器101取得信号数据(S201)。图5是对生成用于检查钢帘线的劣化的信号数据的原理进行说明的图,图6(a)~6(c)是表示在图5中扶手中存在断裂时的与接收线圈交链的磁通的方向的图。参照图5以及图6(a)~6(c),针对在本实施例中所采用的、生成用于使用2个振荡线圈和1个接收线圈来检查检查对象M(钢帘线)的劣化的信号数据的原理进行说明。
如图5所示,在本实施例中,在与检查对象M相对的位置,作为线圈组,将振荡线圈51(第1振荡线圈)、接收线圈53以及振荡线圈52(第2振荡线圈)沿着检查对象M的延伸方向(图3的横向)按照该顺序进行配置。
振荡线圈51以及振荡线圈52产生彼此反向的交流磁场。接收线圈53位于振荡线圈51与振荡线圈52的中间,经由检查对象M接受由振荡线圈51以及振荡线圈52所产生的磁力线来检测磁场的变化(磁场波形)并作为信号数据(测定数据)进行输出。
由振荡线圈51所产生的磁力线B1、B2、B3穿过检查对象M,但是从检查对象M中漏出而返回振荡线圈51。此时,返回振荡线圈51的磁力线B1、B2、B3的大小取决于检查对象M的横截面积、高度h(从检查对象M到振荡线圈51的距离)。另外,距离振荡线圈51越近磁力越强,因此磁力线B1、B2、B3的强度的大小关系变为B1>B2>B3。
同样地,由振荡线圈52所产生的磁力线B11、B12、B13穿过检查对象M,但是从检查对象M中漏出而返回振荡线圈52。另外,磁力线B11、B12、B13的强度的大小关系变为B11>B12>B13。
在这里,设图5的向上的方向为磁力的正方向。另外,设振荡线圈51和振荡线圈52所产生的交流磁场的强度为同等强度。另外,以下,考虑在某个瞬间,由振荡线圈51产生的磁场在向纸面下方穿过自身的内部的方向上产生,且由振荡线圈52产生的磁场在向纸面上方穿过自身的内部的方向上产生的情况。
此时,在振荡线圈51与接收线圈53之间的位置,磁力线B1与磁力线B13以抵消方式产生作用,但是磁力线B1更强(B1+B13>0),因此会残留向上的磁力线。另外,在振荡线圈52与接收线圈53之间的位置,磁力线B3与磁力线B11以抵消方式产生作用,但是磁力线B11更强(B3+B11<0),因此会残留向下的磁力线。
另外,在接收线圈53中,磁力线B2与磁力线B12被抵消。此时,磁力线B2与磁力线B12的强度是同等强度(B2+B12=0),因此不会残留磁力线。因此,如果检查对象M是正常的(没有断裂等劣化),则在接收线圈53中不产生电流。
接下来,参照图6(a)~6(c),针对在检查对象M中存在断裂的情况进行说明。以下,将与接收线圈53交链的磁通表示为Φ。如图6(a)所示,在检查对象M中,如果在振荡线圈51与接收线圈53的之间的位置存在断裂部位60,则由振荡线圈51产生并穿过检查对象M的内部的磁力线几乎全部从断裂部位向上方发出,因此未到达接收线圈53,其结果,来自振荡线圈52的磁力线变得更强,磁通Φ<0。
另外,如图6(b)所示,在检查对象M中,如果在接收线圈53的正下方的位置存在断裂部位60,则来自振荡线圈51以及52的磁力线抵消,磁通Φ=0。
另外,如图6(c)所示,在检查对象M中,如果在接收线圈53与振荡线圈52的之间的位置存在断裂部位60,则由振荡线圈52产生并穿过检查对象M的内部的磁力线几乎全部从断裂部位向下方发出,因此未到达接收线圈53,其结果,来自振荡线圈51的磁力线变得更强,磁通Φ>0。
因此,根据从接收线圈53输出的电流(磁场波形)的变化,可以确定检查对象M中的断裂以及扭曲等的劣化部位。也就是说,在检查对象M的劣化部位,从接收线圈输出的磁场波形会大幅上升下降。由此,通过根据像这样的结构以及原理,特别是可以不必使用永久磁铁,而以高SN比来生成用于检查检查对象M的劣化的信号数据。
(II)由数据处理装置所进行的劣化检测处理
接下来,通过数据处理装置102a来处理由上述磁传感器101所生成的信号数据。图7是表示实施例1所涉及的钢帘线的一部分的俯视图和对应于该一部分的信号数据的一个例子的图。由磁传感器101所生成的信号数据被发送到数据处理装置102a的标记物识别部103,并根据该信号数据识别标记物位置以及范围(S202)。这是为了使扶手与信号数据相对应而实施的处理。即标记物是用于调查在扶手110的哪个位置检测出信号数据中所包含的各峰值的记号。
作为标记物,没有特别地限定,但是例如专利文献1,可以在扶手110的表面设置铁箔胶带,在信号数据上人为地制作由铁箔胶带引起的信号,并将该信号作为标记物。标记物为了可以明确地将其信号识别为由标记物引起的信号,因此优选使用在磁传感器所检测的信号中成为最强信号强度那样的材料来进行制作。在图7的信号数据中,设由标记物71引起的信号为S71。
接下来,向既定构造识别部104发送信号数据,识别扶手110(钢帘线3)的既定构造的位置以及范围(S203)。在图7中,作为既定构造,针对在钢帘线中存在不是由劣化引起的、而是为了便于制造而设置的2个断线部位(不连续的部位)72、73的情况进行说明。如此,扶手110具有各自特有的构造。这些既定构造的识别可以例如在设置乘客输送机后,运行开始前预先通过磁传感器取得信号并进行存储来进行识别。另外,也可以使用通过X射线透射检查等所取得的投影图像等来识别位置。为了能够与劣化引起的信号相区别,只要是在产生劣化前取得的,使用何种手段来取得由既定构造引起的信号都可以。
如图7所示,预先掌握2个既定构造的位置以及范围,将与这些位置相对应的信号数据存储为既定构造,并进行识别。在图7的信号数据中,将由既定构造72以及73引起的信号分别设为S72以及S73。
接下来,根据在标记物识别部103中识别出的标记物以及在既定构造识别部104中识别出的既定构造的位置,将信号数据划分为多个范围(S204)。使用图8来说明信号数据的划分例。图8是表示对图7的信号数据进行划分而得的各范围的图。作为信号数据的划分方法,例如在图8中,设识别出的标记物71的位置的前后的预定距离为位置范围R1,设从既定构造72到既定构造73之间为位置范围R2,设标记物71与既定构造72之间为位置范围R3。位置范围可以考虑易于检测由劣化引起的信号而自由地决定。
除了由上述标记物71、既定构造72、73引起的信号,如图8所示,信号数据中还包含由基于钢帘线3的劣化的断线74引发的信号S74、扭曲75引起的信号S75。以下,针对检测这些由劣化引起的信号数据模式来判定劣化的有无以及程度的方法进行说明。
如图8所示,当存在由标记物71、既定构造72、73、基于劣化的断线74以及扭曲75引起的信号时,只单纯地进行信号数据全体R的信号强度的比较无法检测由劣化引起的信号。其理由是由于由断线74以及扭曲75引起的信号S74以及S75的强度比由既定构造72、73引起的信号S72以及S73弱。在像这样的情况下,在图8中为了便于说明,以区分各信号的方式进行了表示,如果观察信号数据全体的范围R,存在由断线74引起的信号S74以及由扭曲75引起的信号S75被隐藏在背景中,无法进行检测的情况。
因此,在本实施例中,使用针对每一个信号位置范围(R1~R3)所决定的不同的判定基准来评价信号数据(S205)。例如,已经掌握了信号范围R1中所包含的信号S71是由标记物71引起的信号,位置范围R2的两端的信号S72以及S73是由既定构造72、73引起的信号,因此将除此以外出现的信号作为对象进行判定处理即可。也就是说,可以针对每一个位置范围设置考虑了标记物71以及既定构造72、73的判定基准(阈值)来判定劣化的有无以及程度。
例如,针对包含具有最强信号强度的S71的位置范围R1,为了防止由劣化引起的低强度的信号被隐藏在背景中,通过将阈值设定为比其他范围更低来进行调查,或者针对该范围将时间轴设定得更细来进行调查,能够以高精确度检测由劣化引起的信号。
如上所述,虽然很难根据信号数据的全范围R的信号强度来以高精度检测劣化,但是通过限定位置范围,并针对每一个位置范围改变判定基准,可以识别由钢帘线3的劣化引起的信号数据。
如此,判断是否存在要判定的位置范围(S206),重复判定处理(S205,S206)。如果没有需要进行判定的位置范围则结束判定处理,并在显示部107中显示信号数据、判定的结果以及划分出的范围(S207)。
图9是表示显示在实施例1所涉及的扶手检查系统的显示部中的检查结果的一个例子的图。在信号数据中,对于判定的结果为由预先识别出的标记物71引起的信号以及由既定构造72、73引起的信号以外所检测出的信号赋予记号(图9的箭头A以及B),以便检查者识别它们。另外,通过显示识别出的信号位置范围R1~3,各信号的扶手中的位置变得清楚,易于进行扶手的劣化部位的确定。另外,通过针对每一个位置范围明示判定基准(v1~v3),使检查者的信号掌握以及劣化的程度变得清楚。如图9所示,针对不是由标记物71、既定构造72、73等的劣化引起的信号,通过遮盖或另行显示该信号,可以帮助检查者掌握由劣化引起的信号。
根据以上的结构,通过预先识别由标记物71或既定构造72、73引起的信号所存在的位置,另外,根据位置范围改变判定基准,可以在由磁传感器101所获得的信号数据中,实现很难仅通过信号强度全范围的调查来进行的、由标记物71或既定构造72、73引起的信号和由劣化引起的信号之间的区别,即使是劣化的初始阶段的信号也可以以高精度来进行检测。另外,通过将识别出的位置范围与信号数据一起进行显示,可以简单地确定扶手中的劣化位置。
实施例2
图10是表示实施例2所涉及的扶手的检查系统的框图。实施例2的扶手的检查系统在具有使用过去所取得的信号数据进行比较以及判定的结构的方面与实施例1不同。以下,针对实施例2所涉及的扶手的检查系统以及扶手的检查方法进行说明。
如图10所示,实施例2所涉及的扶手检查系统100b在数据处理装置102b具备信号比较部901的方面和数据处理装置102b连接到检查数据服务器902的方面与实施例1所涉及的扶手检查系统100a不同。在检查数据服务器902中保存着过去的信号数据,并连接到数据处理装置102b以便可以收发数据。
图11是表示实施例2所涉及的数据处理装置中的处理的流程的一个例子的流程图。信号数据取得(S201)、标记物信号位置识别(S202)、扶手内的既定构造的识别(S203)、信号的划分(S204)以及劣化的判定处理(S205)与前述的实施例1的处理内容相同。
在本实施例中,数据处理装置102b从检查数据服务器902中取得过去检查同一个扶手时的信号数据(S1001)。然后,对过去的检查数据与本次取得的检查数据的同一位置范围进行比较(S1002)。由此,可以评价从过去取得检查数据时开始到本次的检查为止的扶手的劣化的经时变化(发展程度)。
直到成为检查对象的位置范围消失,重复S205、S1001以及S1002(S206),如果位置范围消失,则在显示部107中显示判定结果(S207)。
图12是表示显示在实施例2所涉及的扶手检查系统的显示部中的检查结果的一个例子的图。如图12所示,显示过去的测量结果(测量M1)、本次的测量结果(测量M2)以及识别出的位置范围(R1~3)。同时,通过针对每一个位置范围表示过去的测量数据和本次的测量结果以及判定基准,劣化的变化被可视化,检查者可以明确地掌握劣化的发展程度。另外,通过像这样比较多个信号数据,可以明确地区分识别信号数据中不定期出现的噪音和由劣化引起的信号。通过以上的处理,在扶手检查系统中,可以进行伴随时间的劣化的定量判定,另外检查者对劣化的发展程度的掌握变得容易。
以上,如说明所述,示出了根据本发明所涉及的扶手检查系统以及扶手检查方法,可以提供一种对由扶手的劣化引起的信号和由扶手的既定构造引起的信号进行区分,在劣化的初始阶段以高精度来检测由劣化引起的信号,并且可以简单地确定扶手中的劣化的位置的扶手检查系统以及扶手检查方法。
本发明不限定于上述的实施例,包含各种各样的变形例。例如,上述实施例是为了便于理解本发明而详细地说明的例子,而不是限定为必须具备所说明的全部结构的例子。另外,可以将某实施例的结构的一部分置换为其他实施例的结构,另外,也可以将其他实施例的结构增加到某实施例的结构中。另外,针对各实施例的结构的一部分,可以进行其他结构的增加、删除、置换。
例如,可以通过在集成电路中进行设计等而由硬件来实现上述各结构、功能、处理部以及处理手段等的一部分或者全部。另外,可以通过处理器来解释并执行实现各个功能的程序而由软件来实现上述的各结构、功能等。实现各功能的程序、表格、文件等的信息可以放置在存储器、硬盘、SSD(Solid State Drive)等的记录装置或IC(IntegratedCircuit)卡以及DVD(Digital Video Disc)等的记录介质中。
另外,示出在说明上认为必要的控制线、信息线,但是并不限定为示出产品上全部的控制线、信息线。本发明所涉及的系统的数据处理方法,还可以通过用于使计算机执行其各步骤的图像处理程序、记录了图像处理程序的计算机可读取的记录介质、包含图像处理程序并可加载到计算机的内部存储器中的程序产品、包含该程序的服务器等的计算机等来提供。
Claims (6)
1.一种扶手检查系统,是乘客输送机的扶手的检查系统,其特征在于,
具备:
磁传感器,其以能够装卸的方式安装在所述扶手中,一边驱动所述扶手一边检测磁场的变化来生成信号数据;以及
数据处理装置,其接收所述信号数据,并判定所述扶手有无劣化以及劣化的程度,
所述数据处理装置具有:
标记物识别部,其在所述信号数据中,识别由预先设置在所述扶手的预定部位的标记物引起的信号;
既定构造识别部,其在所述信号数据中,识别由所述扶手中特有的构造即既定构造引起的信号;
信号位置划分部,其根据所述信号数据中的所述标记物的信号的位置和所述既定构造的信号的位置,将所述信号数据划分为多个范围;
信号判定部,其根据所述信号数据判定所述扶手的劣化;以及
显示部,其显示所述判定的结果,
所述信号判定部根据对每一个划分出的所述范围所决定的判定基准来进行所述扶手的劣化的判定处理,并且,针对所述多个范围之一,即包含所述标记物的信号的前后预定距离的范围,将所述判定基准设定得比所述多个范围中的其他范围更低,
所述显示部显示所述信号数据、所述判定的结果以及划分出的所述范围。
2.根据权利要求1所述的扶手检查系统,其特征在于,
所述信号判定部,针对所述信号数据的划分出的每一个所述范围,决定考虑了由所述标记物以及所述既定构造引起的信号的强度的阈值来检测由所述扶手的劣化引起的信号。
3.根据权利要求1所述的扶手检查系统,其特征在于,
所述扶手检查系统还具有:
检查数据服务器,其存储过去所生成的信号数据;以及
信号比较部,其比较所述过去所生成的信号数据和当前所生成的信号数据来获得比较结果,
所述扶手检查系统具有在所述显示部中显示所述比较结果并能够评价所述扶手的劣化的经时变化的结构。
4.根据权利要求1~3的任一项所述的扶手检查系统,其特征在于,
所述标记物成为用于使所述扶手与所述信号数据对应的记号,由通过所述磁传感器检测出高强度的信号的材料构成。
5.根据权利要求1~3的任一项所述的扶手检查系统,其特征在于,
所述磁传感器具有2个振荡线圈和设置在所述2个振荡线圈之间的接收线圈,
在所述扶手中安装了所述磁传感器时,从所述振荡线圈产生的磁力线经由所述扶手被所述接收线圈接收,所述扶手检查系统具有检测所述接收线圈的磁场的变化来生成所述信号数据的结构。
6.一种扶手检查方法,是乘客输送机的扶手的检查方法,其特征在于,
具有以下步骤:通过以能够装卸的方式安装在所述扶手中的磁传感器,一边驱动所述扶手一边检测磁场的变化来生成信号数据;以及
在数据处理装置中接收由所述磁传感器所生成的所述信号数据,并判定扶手有无劣化以及劣化的程度,
所述数据处理装置在所述信号数据中,识别由预先设置在所述扶手的预定部位的标记物引起的信号和所述扶手中特有的构造即既定构造引起的信号,
根据所述标记物的信号的位置和所述既定构造的信号的位置,将所述信号数据划分为多个范围,
根据对每一个划分出的所述范围所决定的判定基准来进行所述扶手的劣化的判定处理,并且,针对所述多个范围之一,即包含所述标记物的信号的前后预定距离的范围,将所述判定基准设定得比所述多个范围中的其他范围更低,
在显示装置中显示所述信号数据、所述判定的结果以及划分出的所述范围。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016134943A JP6587988B2 (ja) | 2016-07-07 | 2016-07-07 | ハンドレールの検査システムおよびハンドレールの検査方法 |
| JP2016-134943 | 2016-07-07 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107589173A CN107589173A (zh) | 2018-01-16 |
| CN107589173B true CN107589173B (zh) | 2020-10-30 |
Family
ID=60949119
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710447616.7A Active CN107589173B (zh) | 2016-07-07 | 2017-06-14 | 扶手的检查系统以及扶手的检查方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6587988B2 (zh) |
| CN (1) | CN107589173B (zh) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7020564B2 (ja) * | 2018-10-12 | 2022-02-16 | 三菱電機株式会社 | 乗客コンベアの手摺抗張体検査装置 |
| WO2020079747A1 (ja) | 2018-10-16 | 2020-04-23 | 株式会社島津製作所 | 磁性体管理システムおよび磁性体管理方法 |
| JP7341922B2 (ja) * | 2020-02-28 | 2023-09-11 | 株式会社日立ビルシステム | ワイヤー検査システム及びワイヤー検査装置 |
| GB2606397B (en) * | 2021-05-07 | 2023-07-19 | Three Smith Group Ltd | Damage detection system |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02151732A (ja) * | 1988-12-02 | 1990-06-11 | Toyota Motor Corp | エンジンの異音検出方法 |
| JPH0238837Y2 (zh) * | 1984-09-13 | 1990-10-18 | ||
| JPH10218541A (ja) * | 1997-02-12 | 1998-08-18 | Hitachi Building Syst Co Ltd | 乗客コンベアの移動手摺りの損傷位置検出方法 |
| CN102007400A (zh) * | 2008-03-31 | 2011-04-06 | 杰富意钢铁株式会社 | 周期性缺陷检测装置及其方法 |
| CN102200528A (zh) * | 2011-04-02 | 2011-09-28 | 太原理工大学 | 一种用于钢丝绳断丝在线检测装置 |
| CN105565139A (zh) * | 2014-11-05 | 2016-05-11 | 株式会社日立大厦系统 | 移动扶手劣化诊断装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2540915B2 (ja) * | 1988-07-27 | 1996-10-09 | トヨタ自動車株式会社 | エンジンの異音検出方法 |
| JP2005156305A (ja) * | 2003-11-25 | 2005-06-16 | Daido Steel Co Ltd | 内部欠陥の評価方法 |
| US7275637B2 (en) * | 2005-02-24 | 2007-10-02 | Barry Charles Brown | Multi-channel conveyor belt condition monitoring |
| JP6153859B2 (ja) * | 2013-12-20 | 2017-06-28 | 株式会社日立ビルシステム | 移動手摺り劣化診断装置 |
-
2016
- 2016-07-07 JP JP2016134943A patent/JP6587988B2/ja active Active
-
2017
- 2017-06-14 CN CN201710447616.7A patent/CN107589173B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0238837Y2 (zh) * | 1984-09-13 | 1990-10-18 | ||
| JPH02151732A (ja) * | 1988-12-02 | 1990-06-11 | Toyota Motor Corp | エンジンの異音検出方法 |
| JPH10218541A (ja) * | 1997-02-12 | 1998-08-18 | Hitachi Building Syst Co Ltd | 乗客コンベアの移動手摺りの損傷位置検出方法 |
| CN102007400A (zh) * | 2008-03-31 | 2011-04-06 | 杰富意钢铁株式会社 | 周期性缺陷检测装置及其方法 |
| CN102200528A (zh) * | 2011-04-02 | 2011-09-28 | 太原理工大学 | 一种用于钢丝绳断丝在线检测装置 |
| CN105565139A (zh) * | 2014-11-05 | 2016-05-11 | 株式会社日立大厦系统 | 移动扶手劣化诊断装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6587988B2 (ja) | 2019-10-09 |
| JP2018004555A (ja) | 2018-01-11 |
| CN107589173A (zh) | 2018-01-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107589173B (zh) | 扶手的检查系统以及扶手的检查方法 | |
| JP6470023B2 (ja) | コンベアベルトスプライスを監視する方法 | |
| CN101259931B (zh) | 电梯的钢丝绳检查装置 | |
| KR20200088439A (ko) | 와이어 로프 검사 장치, 와이어 로프 검사 시스템 및 와이어 로프 검사 방법 | |
| EP3168583A1 (en) | Apparatus and method for diagnosing abnormal operation of a rotor | |
| JP2016180676A (ja) | 検知システム及び検知方法 | |
| JP2019168253A (ja) | 磁性体検査システム、磁性体検査装置および磁性体検査方法 | |
| US20170270489A1 (en) | Identification and test support device and method | |
| CN114074879B (zh) | 钢缆的检查方法及装置 | |
| JPWO2020246131A1 (ja) | ワイヤロープ検査システムおよびワイヤロープ検査方法 | |
| US20160216333A1 (en) | System and method for induction motor rotor bar magnetic field analysis | |
| CN113784907B (zh) | 钢丝绳检查系统和钢丝绳检查方法 | |
| JP7200697B2 (ja) | ワイヤロープ検査装置およびワイヤロープ検査方法 | |
| JPWO2020095354A1 (ja) | 磁性体検査装置および磁性体検査システム | |
| JP7081446B2 (ja) | 磁性体検査装置および磁性体検査システム | |
| JP7271866B2 (ja) | 磁性体検査システムおよびプログラム | |
| CN114127518A (zh) | 光纤感测系统、光纤感测设备和异常判断方法 | |
| JP6992776B2 (ja) | エレベータ用ロープの診断システム及び診断方法 | |
| JP2000313583A (ja) | ハンドレール用スチールコードの診断方法および磁束変化検査装置 | |
| JP2009234747A (ja) | エスカレータの音響診断装置 | |
| CN106855615A (zh) | 一种电流传感器异常检测方法及装置 | |
| JP6958580B2 (ja) | エレベータ用ロープの診断システム及び診断方法 | |
| Witoś et al. | NDE of mining ropes and conveyors using magnetic methods | |
| JPH10218541A (ja) | 乗客コンベアの移動手摺りの損傷位置検出方法 | |
| Slesarev et al. | Application of MFL nondestructive testing for automated rope condition monitoring |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |