CN107407340B - 具有中央元件的万向接头 - Google Patents
具有中央元件的万向接头 Download PDFInfo
- Publication number
- CN107407340B CN107407340B CN201780000404.2A CN201780000404A CN107407340B CN 107407340 B CN107407340 B CN 107407340B CN 201780000404 A CN201780000404 A CN 201780000404A CN 107407340 B CN107407340 B CN 107407340B
- Authority
- CN
- China
- Prior art keywords
- central element
- head portion
- arm
- linkage system
- input
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





























































Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D3/00—Yielding couplings, i.e. with means permitting movement between the connected parts during the drive
- F16D3/16—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts
- F16D3/26—Hooke's joints or other joints with an equivalent intermediate member to which each coupling part is pivotally or slidably connected
- F16D3/44—Hooke's joints or other joints with an equivalent intermediate member to which each coupling part is pivotally or slidably connected the intermediate member being connected to the coupling parts by ridges, pins, balls, or the like guided in grooves or between cogs
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C1/00—Flexible shafts; Mechanical means for transmitting movement in a flexible sheathing
- F16C1/02—Flexible shafts; Mechanical means for transmitting movement in a flexible sheathing for conveying rotary movements
- F16C1/04—Articulated shafts
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D3/00—Yielding couplings, i.e. with means permitting movement between the connected parts during the drive
- F16D3/16—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts
- F16D3/26—Hooke's joints or other joints with an equivalent intermediate member to which each coupling part is pivotally or slidably connected
- F16D3/30—Hooke's joints or other joints with an equivalent intermediate member to which each coupling part is pivotally or slidably connected in which the coupling is specially adapted to constant velocity-ratio
- F16D3/34—Hooke's joints or other joints with an equivalent intermediate member to which each coupling part is pivotally or slidably connected in which the coupling is specially adapted to constant velocity-ratio parts being connected by ridges, pins, balls, or the like guided in grooves or between cogs
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D3/00—Yielding couplings, i.e. with means permitting movement between the connected parts during the drive
- F16D3/16—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts
- F16D3/26—Hooke's joints or other joints with an equivalent intermediate member to which each coupling part is pivotally or slidably connected
- F16D3/38—Hooke's joints or other joints with an equivalent intermediate member to which each coupling part is pivotally or slidably connected with a single intermediate member with trunnions or bearings arranged on two axes perpendicular to one another
- F16D3/382—Hooke's joints or other joints with an equivalent intermediate member to which each coupling part is pivotally or slidably connected with a single intermediate member with trunnions or bearings arranged on two axes perpendicular to one another constructional details of other than the intermediate member
- F16D3/385—Bearing cup; Bearing construction; Bearing seal; Mounting of bearing on the intermediate member
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D3/00—Yielding couplings, i.e. with means permitting movement between the connected parts during the drive
- F16D3/16—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts
- F16D3/26—Hooke's joints or other joints with an equivalent intermediate member to which each coupling part is pivotally or slidably connected
- F16D3/38—Hooke's joints or other joints with an equivalent intermediate member to which each coupling part is pivotally or slidably connected with a single intermediate member with trunnions or bearings arranged on two axes perpendicular to one another
- F16D3/382—Hooke's joints or other joints with an equivalent intermediate member to which each coupling part is pivotally or slidably connected with a single intermediate member with trunnions or bearings arranged on two axes perpendicular to one another constructional details of other than the intermediate member
- F16D3/387—Fork construction; Mounting of fork on shaft; Adapting shaft for mounting of fork
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D3/00—Yielding couplings, i.e. with means permitting movement between the connected parts during the drive
- F16D3/16—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts
- F16D3/26—Hooke's joints or other joints with an equivalent intermediate member to which each coupling part is pivotally or slidably connected
- F16D3/44—Hooke's joints or other joints with an equivalent intermediate member to which each coupling part is pivotally or slidably connected the intermediate member being connected to the coupling parts by ridges, pins, balls, or the like guided in grooves or between cogs
- F16D3/46—Hooke's joints or other joints with an equivalent intermediate member to which each coupling part is pivotally or slidably connected the intermediate member being connected to the coupling parts by ridges, pins, balls, or the like guided in grooves or between cogs each coupling part embracing grooves or ridges on the intermediate member
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49826—Assembling or joining
- Y10T29/49947—Assembling or joining by applying separate fastener
- Y10T29/49959—Nonresilient fastener
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Health & Medical Sciences (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Rolling Contact Bearings (AREA)
- Steering Controls (AREA)
- Snaps, Bayonet Connections, Set Pins, And Snap Rings (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Power Steering Mechanism (AREA)
Abstract
一种用于传递扭矩的联动系统包括中央元件、输入臂和输出臂。中央元件具有四个侧部以及顶部和底部。输入臂和输出臂均具有本体部分和用于与中央元件连接的头部部分。输入臂和输出臂中的每一者的头部部分限定具有第一半径的支承表面。输入臂和输出臂以使得头部的支承表面偏移90度的方式接合中央元件。
Description
本申请要求于2016年1月8日提交的美国临时申请62/276,432、于2016年2月17日提交的美国临时申请62/296,338以及于2016年9月19日提交的美国临时申请No.62/396,348的权益,其中,所有这些申请的名称都为“UNIVERSAL JOINT WITH CENTRAL ELEMENT(具有中央元件的万向接头)”,这些申请的全部公开内容在此通过参引并入本文中。
技术领域
本公开涉及用于万向接头的设备和方法。
背景技术
本部分中的陈述仅提供与本公开有关的背景信息但其可能不构成现有技术。
万向接头(参见图1)是允许通过成角度的轴线传递旋转运动和功的部件。万向接头的一些常见用途可以包括转向柱、襟翼展开系统以及车门系统。
在许多应用中,万向接头可能会经受可能反复且交替的弯曲载荷。实际上,万向接头可以长时间——例如,在商用飞行器襟翼展开系统的情况下为20年——承受并暴露于应力。在各种应用中,输入臂与输出臂之间的偏移角度会导致附加的且不断增大的载荷。此外,对于大于35度的偏移角度而言,输入臂和输出臂的轭状部可能会容易受到约束或干涉。此限制可能会导致需要附加的接头以适应所需的角度偏移。另外,大扭矩应用可能需要较大的万向接头,而较大的万向接头可能难以适应具有空间限制的某些应用,比如转向柱组件。
图1是现有技术的万向接头的示例,其示出了由于部件的数目而增加了组件的复杂性。另外,载荷传递会由于销和轭状部的尺寸而受到限制。
其他应用领域将通过本文中提供的描述而变得显而易见。应当理解的是,描述和具体示例仅意在用于说明的目的,而不意在限制本公开的范围。
发明内容
本发明由所附权利要求限定,并且本部分的任何内容均不应被视为是对这些权利要求的限定。
在一方面,用于传递扭矩的联动系统的一个实施方式包括中央元件、输入臂和输出臂。中央元件具有在投影平面图中限定椭圆形形状的四个侧部以及在投影平面图中限定大致矩形形状的顶部和底部。输入臂和输出臂均限定沿着轴线延伸的近端部分和远端部分,其中,远端部分具有用于与中央元件连接的头部部分,并且近端部分限定本体部分。输入臂和输出臂中的每一者的头部部分限定具有第一半径的支承表面。输入臂和输出臂以使得每个头部部分的支承表面偏移90度的方式接合中央元件。中央元件可以具有槽,其中,保持构件联接至输入臂或输出臂并被布置在该槽中。
在另一方面,转向组件的一个实施方式包括联接至联动组件的转向接合件。
在又一方面,用于组装联动组件的方法包括:将中央元件与输入臂的头部部分的c形腔对准,中央元件具有由第一半径限定的相对的第一支承表面和第二支承表面,其中,该腔限定第三支承表面;将中央元件滑动到输入臂的头部部分的腔中,使得第一支承表面和第二支承表面接合第三支承表面;将第一销插入穿过输入臂的头部部分中的第一通道;以及将第一销设置在绕中央元件的外周的至少一部分延伸的第一槽中。在一个实施方式中,该方法还包括将中央元件与输出臂的头部部分的c形腔对准,中央元件具有由第二半径限定的相对的第三支承表面和第四支承表面,其中,该腔限定第五支承表面;将中央元件滑动到输出臂的头部部分的腔中,使得第三支承表面和第四支承表面接合第五支承表面;将第二销插入穿过输出臂的头部部分中的第二通道;以及将第二销布置在绕中央元件的外周的至少一部分延伸的第二槽中。
在又一方面,臂具有限定筒形形状的内部支承表面的头部部分,该内部支承表面具有第一轴线和第一半径。该臂具有部分地限定该内部支承表面的喙状部。该喙状部具有筒形形状的外表面,该外表面具有第二轴线和第二半径。在一个实施方式中,第一半径与第二半径相同,并且第一轴线与第二轴线相交。
在联动组件的各种实施方式中,转向组件和组装联动组件的方法相比于其他联动组件和转向组件以及方法提供了显著的优点。例如但不限于,该联动组件可以通过更大的偏移角度传递更大的扭矩。另外,该联动组件可以以最少的部件和组装步骤而被制得相对紧凑,从而允许更快且成本更低的安装及更换。
已通过概括性的介绍给出上述段落,并且上述段落不意在限制所附权利要求的范围。通过参照结合附图进行的以下详细描述,将更好地理解各种优选实施方式以及其他优点。
附图说明
为了更好地理解本公开,现在将对通过示例的方式参照附图给出本公开的各种形式进行描述,在附图中:
图1是现有技术的万向接头组件的分解立体图。
图2是具有头部部分的输入臂或输出臂的一个实施方式的侧视图。
图3是图2中示出的输入臂或输出臂的第一端视图。
图4是图2中示出的输入臂或输出臂的俯视图。
图5是图2中示出的输入臂或输出臂的第二端视图。
图6是图2至图5中示出的输入臂或输出臂的立体图。
图7是中央元件的一个实施方式的立体图。
图8是图7中示出的中央元件的俯视或仰视图。
图9A和图9B是图7中示出的中央元件的相反的侧视图。
图10是图7中示出的中央元件的拐角视图。
图11是联动系统的一个实施方式的分解立体图。
图12是图11中示出的联动系统的立体图。
图13是图11中示出的联动系统的侧视图。
图14至图16示出了联动系统的示例性实施方式的组件。
图17是中央元件的一个实施方式的立体图。
图18是图17中示出的中央元件的俯视或仰视图。
图19是图17中示出的中央元件的侧视图。
图20是中央元件的另一实施方式的立体图。
图21是图20中示出的中央元件的俯视或仰视图。
图22是图20中示出的中央元件的侧视图。
图23是中央元件的另一实施方式的立体图。
图24是图23中示出的中央元件的侧视图。
图25是图23中示出的中央元件的俯视或仰视图。
图26是联动组件的另一实施方式的分解立体图。
图27是保护罩的一个实施方式的立体图。
图28是图27中示出的保护罩的剖开图。
图29是输入臂或输出臂的另一实施方式的侧视图。
图30A和图30B是示出了45度偏移时的余隙的图。
图31是输入臂或输出臂的另一实施方式的侧视图。
图32是输入臂或输出臂的另一实施方式的立体图。
图33是双头臂的立体图。
图34是具有多个如在图33中示出的双头臂的联动组件的立体图。
图35至图37示出了旋转通过最大角度的联动装置。
图38和图39是中间设计阶段期间头部部分的各种图示。
图40至图42是中间设计阶段期间头部部分的各种图示。
图43和图44是最终设计阶段期间头部部分的各种图示。
图45是联动组件的一个实施方式的侧视图。
图46是联动组件的另一实施方式的侧视图。
图47至图51是中央元件的另一实施方式的各种视图。
图52是具有联动组件的车辆示意图的立体图,其中,该联动组件具有联接至其的输入装置和输出装置。
图53至图55示出了中央元件的另一实施方式的不同视图。
图56A至图56D示出了中央元件的另一实施方式的立体图、拐角/对角视图、侧视图以及俯视图。
图57A至图57E分别示出了组件的另一实施方式的侧视图、不具有中央元件或保持构件的截面图、具有中央元件但不具有保持构件的截面图、具有中央元件和保持构件的截面图以及具有中央元件、保持构件和偏置构件的截面图。
图58A至图58C示出了输入臂或输出臂的另一实施方式的立体图和正视图。
图59A至图59D示出了保持构件的替代性实施方式。
图60A至图60C示出了保持元件的替代性实施方式。
图61A和图61B分别示出了具有中央元件和保持构件以及具有中央元件、保持构件和偏置构件的组件的另一实施方式的截面图。
图62是中央元件的另一实施方式的俯视或仰视图。
图63是图62中示出的中央元件的侧视立体图。
图64是图62中示出的中央元件的侧视图。
图65是图62中示出的中央元件的拐角立体图。
本文中描述的附图仅用于说明的目的,而不意在以任何方式限制本公开的范围。
具体实施方式
以下描述在本质上仅仅是示例性的并且不意在限制本公开内容、应用或用途。应当理解的是,在整个附图中,对应的附图标记指示相似的或对应的部件或特征。
应当理解的是,术语“多个”在本文中使用时指的是两个或更多个。术语“纵向”在文本中使用时指的是或者涉及输入臂或输出臂的长度方向或纵长方向,包括其纵向轴线2。术语“侧向”在本文中使用时指的是指向纵向方向之间或者指向(垂直于)纵向方向,包括侧向轴线4。术语“联接”指的是直接地或间接地连接至例如中间构件或者与中间构件直接地或间接地接合,而不要求接合是固定的或永久性的,但该接合可以是固定的或永久性的。术语“横向”指的是延伸经过轴线以及/或者大致垂直于轴线。应当理解的是,数值术语“第一”、“第二”、“第三”等在本文中使用时并不指示部件的任何特定顺序或次序;例如,除非另有规定,否则“第一”支承表面和“第二”支承表面可以指这些表面的任何顺序,而不限于特定部件的第一支承表面和第二支承表面。另外,第一和第二的记载并不意味着如此引用的特征或项是以不同的方式构造的,而是意味着例如第一支承表面与第二支承表面可以是相同的或者不同的。
输入臂和输出臂:
参照图2至图6,联动组件80包括输入臂和输出臂6,输入臂和输出臂6包括远端头部部分8和近端本体部分10。头部部分8具有构造为C形喙状部16的接合部分,C形喙状部16限定具有第一半径r的侧开口12和腔14。腔14限定内部的凹形支承表面18。开口12和腔14定形状成接纳中央元件50。
C形开口12的中心点20与头部部分的外表面24的中心点22在纵向方向上沿着纵向轴线2间隔开距离G,其中,外表面24的中心点更靠近本体部分。如图2中所示,两个中心点20、22之间的偏移距离G定尺寸成使得由半径r限定的开口12的圆周边界与由半径R限定的外表面24的圆周边界在输入臂或输出臂的远端端部处的两个位置26中相交。在各种实施方式中,间隔G可以在约2mm与50mm之间。可以出于下述两个考虑来设置间隔G以使端部32之间的开口距离最优:(1)需要的期望偏差角度以及(2)组装的能力。如果间隔G增大,则端部32之间的距离将增大。一方面,在不牺牲偏差角度的情况下减小G以使所述端部之间的距离最优,偏差角度由下述点限定:该该点处,端部32与相对的杆端部的内径发生干涉。另外,如果G减小地过多,则会阻碍第二头部部分组装到已联接至中央元件的第一头部部分上。
由位置26相对于中心点20限定的角度α优选地小于或等于170度宽,以防止中央元件被拉动穿过输入臂或输出臂中的任一者的口状部。
腔14的支承表面18构造成具有由半径r限定的内径,该半径r在考虑到针对要防止支承表面之间的干涉配合所需的尺寸公差的任何必要的容许的情况下被定尺寸成与由中央元件50限定的一个或更多个支承表面52、54或56、58的外径或半径(Rce)匹配或对应。
参照图2至图10,在从顶部或底部观察联动装置的情况下,头部部分8的宽度W接近中央元件的直径(2Rce)。头部部分8的宽度根据所需的偏差角度和中央元件的尺寸来优化。例如,如图4中所示,头部部分将允许达35度的偏差。该宽度可能必须减小以允许更大的偏差角度。当该宽度减小时,端部32处的半径将减小,使得侧部30相应地被拉进。这允许在侧部30不接触相对的头部部分的情况下引导前端部32进一步到达相对的头部部分的开口中。
用于保持构件60——比如销或花键——的侧向延伸的通道28被居中在头部部分的纵向轴线2上并与纵向轴线2相交并且延伸到腔14中。通道28与支承表面18大致相切。保持构件60插入穿过该通道并且被布置在形成于中央元件50中的槽62中,以防止中央元件在组装之后穿过头部的任一侧部上的开口12离开腔14。另外,保持构件60和槽62可以定尺寸成使得保持构件将头部8定位并居中在中央元件50上,以使得输入臂和输出臂以预定的偏差角度进行平滑的操作和旋转。
参照图2和图13,开口12具有半径r,而头部的外表面24具有半径R。应当理解的是,较大的R使喙状部的厚度增加并且为喙状部提供额外的强度,但是,当以其最大设计的偏差角度——通常为等于或小于45度的角度——操作时,增加的厚度可能导致喙状部与相对的臂的支承表面18(由r限定)干涉。由于头部部分的偏移的内半径r与外半径R的相交,喙状部16的厚度T是朝向其自由端部32渐缩的或逐渐减小的。喙状部或接合部分的由侧部30或喙状部的边缘限定的宽度也从近似等于头部部分和中央元件的宽度W向内渐缩成自由端部32处的变窄的宽度。喙状部在联动组件旋转通过其最大设计的偏差角度时与相对的臂的开口12的内径或喙状部16不干涉的情况下构造得尽可能厚。
本体部分10沿着纵向轴线2延伸。根据本体部分10相应地是被构造为输入臂的一部分还是输出臂的一部分,本体部分10提供要接受输入力矩或是要传递输出力矩所需的连接点。本体部分的形状或截面——例如圆形、矩形或多边形——可以设计成允许本体部分以足够的强度联接至扭矩输入或输出装置以传递针对该应用的设计寿命所需的扭矩载荷的任何形式。在一个实施方式中,本体部分具有用以接纳轴的开孔34,其中,开孔34可以构造有内螺纹,轴可以刻有外螺纹。在其他实施方式中,螺纹连接也可以颠倒,或者本体部分可以通过焊接、联接件或其他已知的装置紧固至输出装置100或输入装置102。
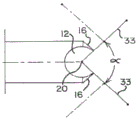
参照图30A和30B,如以上所说明的,成角度的喙状部16在一个实施方式中通过使自由端部32终止于相对于腔的中心点20成角度(α)的平面处来构造。在一个实施方式中,α通过下述方法计算:从轴线2上下旋转45度获得总计90度加上用于余隙的向上额外1度以及向下额外1度,从而形成92度的角度α,使得剩余角度为268度。应当理解的是,在其他实施方式中,α可以大于92度、但是小于或等于170度。
在一个实施方式中,喙状部的形状由在所需的最大偏差角度处相对的头部部分的内径来确定。例如,在图30B中,喙状部16的外表面的筒形形状的半径与相对的头部部分的内径以及中央元件上的四个支承表面的半径相匹配。
参照图35和图36,喙状部16的筒形外表面被示出为在头部部分旋转通过最大角度(例如,35度)时靠近头部部分的内径。喙状部可以定形状且定尺寸成允许达45度并且包括45度的任何偏差角度。图37示出了相对的头部部分处于其彼此最近的相互作用(最大偏差),例如35度。如图37中所示,喙状部的筒形面在35度时接触相对的头部部分的内径,从而防止该筒形面旋转通过任何额外的偏差。
喙状部16的半径(Rb)和位置由相对的头部部分的内径来确定。例如,中央元件的半径(Rce)=相对的头部部分的支承表面的半径(r)=喙状部16的筒形外表面的半径(Rb)(其中,允许公差累积)。另外,限定喙状部16外表面的筒形件的半径Rb的中央轴线将穿过该组件中的方形球的中心点20(参见图30A和图30B、图38以及图39)。因此,当将喙状部16相对于开口12进行定位时,喙状部的筒形件的中央轴线31穿过中心点20。该关系之后能够容易地针对任何尺寸及达45度的角度被按比例调节。
在已经针对给定应用确定了最大偏差角度的情况下,喙状部16可以被制成适应该角度,同时具有作为安全因子的附加几度容差。在一个示例中,该应用将具有30度的最大偏差角度以及附加的5度安全因子。参照图38,需要从中央轴线2偏移35度的两个平面33来在最终的图上绘制形成喙状部的筒形形状。所述筒形形状垂直于所述35度平面延伸。图39示出了绘制过程中的中间阶段的尖端部,以帮助说明在支承表面18成形之前喙状部的筒形形状。喙状部外表面的半径Rb等于支承表面的半径r。
图40至图42是通过头部部分的侧部形成——例如经机加工成——开口12之后喙状部的三个视图。没有进行任何进一步的抛光或机加工,喙状部的尖端部将终止于图38和图30B中示出的35度平面33处。在一个实施方式中,尖端部太尖锐并且在喙状部16的尖端部之间可能不允许足够的空间来完成组装。因此,喙状部的端部32被进一步抛光成——例如被机加工成——具有弧度,以使端部32圆化并且间隔开一定距离,从而允许如图35至图37中示出的组件。
新的喙状部设计提供中央元件周围更厚的材料。这显著地提高了通过喙状部的端部32驱动更大扭矩载荷以及承受更大拉出载荷的能力。图45和图46分别示出了使用图3至图6的喙状部16的组件和使用图43和图44的喙状部16的组件。轴线35沿着中央元件的中央定位。图46中的喙状部16与图45中示出的喙状部16相比沿着竖向中央线35在中央元件的上方和下方具有更大的厚度。图45中示出的喙状部16的厚度在趋近竖向中央线35之前减小。
参照图31,喙状部16的远端部分可以通过形成肩部36而变薄,使得喙状部的近端部分是厚的,并且喙状部的远端部分较薄,从而提供了额外的余隙。
参照图32,腔14的中央部分38可以凹进,使得凹进部分38没有限定支承表面的一部分,但减小了头部部分的重量并且使摩擦力最小化。另外,凹进的中央部分38在喙状部16的前部边缘相对较薄的各种实施方式中、例如在需要35度至45度的偏差时提供了额外的余隙。该凹进部提供附加的余隙,使得喙状部的前部边缘可以制造得较厚。
参照图58A至58C以及图61A和图61B中示出的另一实施方式,输入臂和输出臂6的另一实施方式包括由腔14限定的支承表面18以及形成在该支承表面中的周向槽202、402或凹部。该槽设置在包含输入臂和输出臂6的纵向轴线2的平面200中,并且如图58B中所示,该槽将喙状部16的相对部分平分,该喙状部16的相对部分与图43、图44以及图46中公开的喙状部16的相对部分相同。槽202围绕支承表面仅部分地延伸,其中,槽202的长度由U形接头的期望的旋转极限确定。例如,当用在设计成旋转通过达45度的角度的U形接头上时,该槽将需要从如图58B中所示的与相交平面200正交的平面204向上延伸45度并向下延伸45度,其中,在槽将要终止之前,槽的端部212过渡到支承表面18中。在这种实施方式中,槽202在其端部之间延伸达90度。槽202根据U形接头的期望的旋转极限可以具有更短或更长的轨迹。如下面进一步说明的,槽202——例如槽202的宽度和深度——定尺寸成限定用于图57D、图57E以及图59A至图59D中示出的保持构件210的滚道,其中,保持构件210例如是滚珠或销的倒圆端部。在该实施方式中,不需要穿过头部部分的通道。替代地,如图61A和图61B中所示,槽402可以定形状成接纳柱形销的平端部416,并且槽402构造成具有矩形截面而不是半圆形截面。在该实施方式中,槽402与销412之间的接合防止旋转离开槽402的平面。
参照图33和图34,双头臂40被示出为具有面向相反方向且偏移90度的相反的头部部分8。头部部分与如下所说明的中央元件接合。多个双头组件40可以如图34中示出的那样链结在一起,其中,在该链的相反端部处,最外面的输入臂和输出臂被紧固。如图33中所示,每个头部部分的自由端部32被斜切或者向外远离支承表面18成角度,使得喙状部可以被制得较厚但不与相邻的喙状部干涉。可以在喙状部上形成自由端部32上的斜切部,以使得喙状部之间的开口宽到足以允许组装,同时具有使组件的重量减轻的额外的益处。
应当理解的是,双头臂40的头部部分可以是相同的,只是偏移了90度,或者双头臂40的头部部分可以具有例如如本文中公开的各种实施方式中示出的不同的形状和构型。
在一个实施方式中,任一接头的最大偏差角度为15度,这使得在具有三个中央元件的实施方式中通过总计45度的偏差传递扭矩。以45度的偏差旋转的单个接头组件将使中央元件在组件内每转来回地摆动90度。如果该组件被拉直以使得两个杆端部共享同一旋转轴线,则中央元件将不会摆动,其将只是传递扭矩。具有三个中央元件的链将最大摆动量减小至每转来回30度。这允许三接头设计提供每分钟大约是单接头设计的三倍的转数,或者以相同速度持续三倍的时间长。另外,当与实现相同偏差量的单接头组件相比时,在该实施方式中在支承表面之间产生的摩擦力减小了1/3。链可以根据需要组装有许多接头,其中,每个接头的偏差角度的最大容差由双头设计的喙状部角度来确定。
由于中央元件的运动是来回地摆动,因此尽力使该运动最小化将可以获得延长的预期寿命。决定滑动支承件用于应用的能力的两个主要考虑因素是压力和速度(P x V)。在所有其他因素保持不变的情况下,添加具有双头设计的附加接头将使速度以及每转的摆动旋转量减小。每向链添加一个附加接头,摆动减小得就越大。
该多接头链的设计将用作恒定速度接头。在一个示例中,相反的头部部分彼此偏移90度,其中,应当理解的是,双头部之间的偏移量可以根据应用需要而以从0度至90度的任何角度来定向。相反的头部之间的该偏移角度将需要调整某一角度以获得恒定速度输出。
在各种实施方式中,输入臂和输出臂由金属制成,包括例如轴承钢、碳钢、合金钢、铝以及不锈钢,但是其也可以由其他材料制成,包括各种塑料和复合材料。
中央元件
参照图7至图10,中央元件的一个实施方式具有相对的第一凸形支承表面52和第二凸形支承表面54以及相对的第三凸形支承表面56和第四凸形支承表面58,其中,由输入臂或输出臂中的一者的头部的腔限定的支承表面18接合第一支承表面52和第二支承表面54或者接合第三支承表面56和第四支承表面58。如上所说明的,支承表面52、54、56、58具有近似的半径Rce。中央元件具有顶部64和底部66,顶部64和底部66在投影平面图中限定了大致矩形形状。应当理解的是,顶部和底部可以是可互换的,如图8所显示的,只是其中槽62偏移了90度。应当理解的是,方形是长方形,并且所投影的顶部和底部的矩形形状在一个实施方式中是方形,如图8中所示。中央元件还包括在投影平面图中限定出椭圆形形状的四个侧部68、70,如图9A和图9B中所示。应当理解的是,圆是椭圆,并且在一个实施方式中,椭圆形形状是圆形。所投影的圆68、70的直径或支承表面的2Rce可以改变,例如但非限制性地,包括20mm和150mm以及20mm与150mm之间,或者包括25mm和102mm以及25mm与102mm之间,或其他更小或更大的直径。相交的支承表面52、54、56和58限定了四个顶72、74、76、78或拐角,这四个顶或拐角在中央元件的顶部和底部处相交,但交点可以是虚拟的,在交点处,材料被通过形成开口、狭槽和平坦部分而被移除。
中央元件包括第一槽62和第二槽63,第一槽62在四个侧部68、70中的至少一个侧部上沿着中央元件的外周的一部分延伸,第二槽63在这四个侧部中的其他侧部中的至少一个侧部上沿着中央元件的外周的一部分延伸,其中,第一槽62与第二槽63偏移90度。例如,如图7至图10中所示,第一槽62可以在中央元件的顶部上延伸经过第一支承表面52和第二支承表面54,并且第二槽63可以在中央元件的底部上延伸经过第三支承表面56和第四支承表面58。
在图11、图17至图19、图53至图55以及图62至图65中示出的其他实施方式中,第一槽62和第二槽63均绕中央元件的整个外周延伸,其中,第一槽62和第二槽63在中央元件的顶部和底部处相交,并且将支承表面52、54、56、58中的每个支承表面平分。绕中央元件延伸360度的槽62、63更容易加工。在图20至图22中示出的一个实施方式中,中央元件可以构造有仅一个槽62。在一个实施方式中,顶部64和底部66可以设置有平坦表面82,使得椭圆形侧视图在其顶部和底部上具有平点,如例如图19、图11和图22中所示。
参照图23至图26、图53至图55以及图62至图65,其示出了中央元件的替代性实施方式。在图23至图26中示出的一个实施方式中,中央元件具有从其顶部向其底部延伸的开孔84或开口。在图53至图55以及图62至图65的实施方式中,中央元件具有正交地定位的一对开孔83、85或开口,所述一对开孔83、85或开口与槽62、63对准并且各自从中央元件的相对侧部延伸穿过中央元件,其中,开孔83、85在中央元件的内部或中间部分相交。开孔83、84、85或开口减小了中央元件的材料的量并随之减小了重量。此外,这些开孔提供了用于润滑剂、比如油脂的贮存器。这些开孔可以在第二输出/输入臂联接至中央元件之前被填充有油脂。这些开孔还可以提供方便的加工特征,以帮助在机加工操作期间保持部件。
参照图62至图65的实施方式,中央元件包括形成在四个顶或拐角72、74、76、78中的每个顶或拐角中的卸压狭槽500、504、508、512或切口。狭槽500、504、508、512沿着相应的拐角72、74、76、78朝向中央轴线540沿径向向内延伸。拐角狭槽500、504、508、512的深度和宽度可以根据给定应用的特定要求所需要的来进行调整,从而将中央元件调整成适应给定的应用。在各种实施方式中,狭槽的宽度可以根据中央元件的尺寸而改变,例如通过所投影的圆68、70的直径或支承表面52、54、56、58的对应的半径来确定。例如,狭槽的宽度在一个实施方式中可以小于或等于10mm并大于0,在另一实施方式中可以小于6mm并大于0,或者在1mm与5mm之间并包括1mm和5mm。狭槽500、504、508、512中的每个狭槽优选地在内部终止于扩大的开口502、506、510、514处,扩大的开口502、506、510、514例如是当从中央元件的顶部或底部观察时具有圆形截面的开口。该开口是贯通开口,具有例如筒形形状。该开口的截面可以构造成没有尖锐边缘的其他形状。开口减小了当输入/输出臂6上的扭矩载荷以足以使与狭槽500、504、508、512邻近的材料挠曲的力传递通过中央元件时在这些狭槽的底部(内部部分)处产生的应力集中,从而使狭槽的宽度减小。开口502、506、510、512的尺寸、例如直径优选地比对应的狭槽的宽度大。在一个实施方式中,狭槽500、504、508、512的深度延伸成使得开口502、506、510、512在如例如图62中示出的投影表面上与中心540间隔开和支承表面52、54、56、58的最外面的切线大约相同的距离,或者换言之,开口502、506、510、512位于投影的圆550上。应当理解的是,开口502、506、510、512可以从投影的圆550沿径向向内或向外地定位。拐角狭槽500、504、508、512被包括以用于具有较大扭矩载荷分布和/或冲击载荷分布的应用。
拐角狭槽500、504、508、512允许中央元件的顶或拐角72、74、76、78附近的材料从输入臂6吸收较大载荷并将较大载荷分配至输出臂6。当遇到大到足以使与狭槽邻近的材料挠曲的扭矩载荷时,狭槽(多个狭槽)500、504、508、512允许中央元件的拐角或边缘挠曲。当中央元件挠曲时,载荷被分布在输入臂的口状部/输出臂的口状部与中央元件之间的更大接触区域上。更大的接触区域使输入臂和输出臂与中央元件之间的表面上的每平方英寸的压力磅数减小。通过减小施加的以及在中央元件的工作表面与输入臂和输出臂之间交换的压力,例如,通过减小摩擦、减少由摩擦产生的热以及减少金属疲劳,组件的预期寿命被提高。
参照图47至图51,示出了中央元件250的又一实施方式。中央元件250具有第一槽62和第二槽63,其中,直径比槽大的开口240、260延伸穿过中央元件并且形成相应的槽的端部。此外,开口可以提供润滑剂贮存器并减轻中央元件的重量。
参照图56A至图56D,中央元件的另一实施方式构造成不具有任何槽。而是中央元件在其顶部和底部中的每一者上均具有开口220。所述开口可以形成为延伸穿过中央元件的贯通孔222的相反的口状部,或者所述开口可以在顶部和底部中的每一者处单独地形成。在一个实施方式中,所述开口定尺寸成接纳与输入臂和输出臂的头部部分上的对应的槽202接合的第一保持构件和第二保持构件210。所述开口居中在顶72、74、76、78的拐角上。
中央元件也可以构造有延伸穿过相对的支承表面52、54或56、58的中央的第二贯通孔224。在一个实施方式中,一对第二开口可以相交。可以包括作为减重孔的第二开口(多个第二开口)224以使中央元件的重量减轻。在一个实施方式中,中央元件构造成不具有任何第二开口。
中央元件优选地由摩擦系数相对于臂构件较低的材料——例如金属、陶瓷或对应的塑料和复合材料——制成。
组件:
参照图14至图16,可以通过将中央元件50以及第一臂或输入臂6中的一个第一臂或输入臂定向成使得中央元件的外表面或成对的支承表面52、54或56、58与c形开口12的内表面同心或对准来组装联动组件80。在中央元件被正确地定向时,中央元件50滑动穿过c形开口12进入腔14中,使得相对的支承表面52、54与腔14的支承表面18接合。中央元件上的槽62、63随后与穿过头部形成的通道28对准。保持构件60随后插入穿过通道28并被布置在槽62中。保持构件60例如通过使其一个或更多个端部弯折或变形并使其另一端部扩大而被紧固成使得保持构件不能从通道28移除。替代地或另外地,通道28可以定尺寸成限定与保持构件60的干涉配合。保持构件可以完全布置在通道中以使得其不从输入臂/输出臂的任一端部伸出。
接着,中央元件50远离所连接的臂的本体部分旋转或滚动,直到第一槽62的端部接触第一保持销60为止。在该取向时,输入臂和输出臂中的另一者具有对准成在不与输入臂的喙状部16干涉的情况下滑动地接纳中央元件的c形开口12。中央元件50随后相对于接纳臂滑动或平移,使得输出臂的支承表面18与中央元件的支承表面56、58接合。用于第二保持构件60的第二通道28与中央元件的第二槽63对准,并且第二保持销插入穿过第二通道并被布置在槽63中。保持构件可以在保持构件被按压到任一臂的通道28中的情况下例如通过干涉配合而固定至头部,或者替代地通过将保持构件的一个或更多个端部部分弯折、整平或变形并使另一端部部分扩大而固定至头部。保持构件可以构造为开口销、滚针轴承或其他销或花键构件,并且保持构件可以具有圆形或其他截面形状。
参照图57A至图57E以及图61A和61B的实施方式,可以通过将中央元件50以及第一臂或输入臂6中的一个第一臂或输入臂定向成使得中央元件的外表面或成对的支承表面52、54或56、58与c形开口12的内表面同心或对准来组装联动组件80。一个或更多个保持元件210、310、410布置在中央元件的开口220中。在中央元件包括贯通开口222的一个实施方式中,在开口222中于构造为例滚珠的保持构件210之间设置有弹簧226。如图59A至图59D中所示,保持元件310可以构造有柱形本体312,柱形本体312具有在槽202中接合并游动的倒圆端部314以及可以由弹簧226偏置的平端部316。参照图60A至60C,保持构件410可以构造有柱形本体412,柱形本体412具有相对的平端部416,其中,如图61A和图61B中所示,一个端部416在方形槽402中接合并游动,而另一端部416被弹簧226接合。弹簧226将保持构件210、310、410从中央元件沿径向向外偏置。
在中央元件被正确地定向时,中央元件50滑动穿过c形开口12进入腔14中,使得相对的支承表面52、54与腔14的支承表面18接合。保持构件210、310、410布置槽202、402中。输入臂或输出臂中的另一者具有对准成滑动地接纳中央元件的c形开口12。中央元件50随后相对于接纳臂滑动或平移,使得输入臂或输出臂中的另一者的支承表面18与中央元件的支承表面56、58接合。保持构件210、310、410布置在槽202、402中。在滑动操作期间,保持构件210、310、410可以在内部被按压到贯通开口中,以允许中央元件相对于头部部分6滑动,其中,弹簧216之后将保持构件偏置成与槽202、402接合。弹簧226向保持构件210、310、410施加连续压力,以使保持构件210、310、410与输入臂和输出臂的头部部分中的槽202、402保持接合。
联动组件80可以通过应用至中央元件的露出区域的任何润滑剂来润滑,其中,润滑剂通过每个臂的运动来分布。联动组件可以衬有自润滑材料或滚针轴承,以帮助减小摩擦和磨损。另外,可以周期性地向中央元件中的开孔83、85、85或其他开口添加润滑剂,使得一直提供持续的润滑剂分布。
参照图27和图28,可以绕联动组件安装有护套120或罩。该护套在其被接纳在如图26、图29和图33中所示的形成于本体部分上的环形槽128中的端部处具有环形凸缘122。护套120可以构造有褶状部124,以允许护套在使用期间扩张、弯折以及/或者变形,例如,以允许其端部成角度达45度。优选地在对组件应用润滑剂之后,可以安装其他密封件或罩。
在图52中示出的一个实施方式中,输入装置102包括联接至输入臂的本体部分10的转向接合件130,比如方向盘或把手,并且输出装置100包括例如通过中间变速箱、杆和/或其他部件联接至输出臂的本体部分10的地面接合件140,比如车轮、制动器(skid)、履带或其他已知的装置。可以根据需要在输入装置与输出装置之间布置多于一个的联动组件。
在以下变量中的一些变量或所有变量已确定时,联动装置能够按比例调节并容易地设计成满足特定的应用要求:1)联动组件工作所在的空间包络;2)该应用的最大扭矩载荷和操作扭矩载荷;3)传递扭矩通过所需的偏差角度;4)工作环境条件;5)联动组件的预期寿命;6)会对选择用于中央元件或输入臂和输出臂的材料类型产生影响的任何重量限制;以及7)用于将联动组件与输入装置和输出装置配合的方法。
尽管已参照优选实施方式对本发明进行了描述,但是本领域技术人员将意识到,在不背离本发明的精神和范围的情况下,可以在形式和细节方面做出改变。因此,意图在于以上详细描述被视为是说明性而不是限制性的,并且所附权利要求包括其所有等同替换来限定本发明的范围。
Claims (22)
1.一种用于传递扭矩的联动系统,包括:
中央元件,所述中央元件具有在投影平面图中限定椭圆形形状的四个侧部以及在投影平面图中限定大致矩形形状的顶部和底部,其中,所述中央元件包括在所述四个侧部中的至少一个侧部上沿着所述中央元件的外周的一部分延伸的第一槽;
输入臂和输出臂,所述输入臂和所述输出臂均具有用于与所述中央元件连接的头部部分以及从所述头部部分纵向地延伸的本体部分,其中,所述输入臂和所述输出臂两者的所述头部部分限定了具有第一半径的支承表面,其中,所述输入臂和所述输出臂以使得每个头部部分的支承表面偏移90度的方式接合所述中央元件;以及
第一保持销,所述第一保持销联接至所述输入臂和所述输出臂中的一者并且布置在所述第一槽中。
2.根据权利要求1所述的联动系统,其中,所述中央元件还包括在所述四个侧部中的其他侧部中的至少一个侧部上沿着所述中央元件的外周的一部分延伸的第二槽,其中,所述第一槽与所述第二槽偏移90度,并且所述中央元件还包括联接至所述输入臂和所述输出臂中的另一者并设置在所述第二槽中的第二保持构件。
3.根据权利要求2所述的联动系统,其中,所述第一槽和所述第二槽均绕所述中央元件的外周延伸,并且其中,所述第一槽与所述第二槽相交。
4.根据权利要求3所述的联动系统,其中,所述中央元件还包括正交地定位的一对开孔,所述一对开孔与所述第一槽和所述第二槽对准并且延伸穿过所述中央元件,其中,所述一对开孔在所述中央元件的内部相交。
5.根据权利要求2所述的联动系统,其中,所述中央元件还包括从所述顶部至所述底部延伸穿过所述中央元件的孔。
6.根据权利要求2所述的联动系统,其中,所述输入臂的头部限定第一通道,并且其中,所述第一保持销延伸穿过所述第一通道并布置在所述第一槽中以将所述中央元件相对于所述输入臂的轴线居中。
7.根据权利要求1所述的联动系统,其中,所述四个侧部均具有由第一半径限定的凸形表面,并且所述输入臂和所述输出臂中的每一者的所述头部部分限定了具有凹形表面的腔,所述凹形表面具有与所述第一半径大致相匹配的第二半径。
8.根据权利要求7所述的联动系统,其中,所述输入臂和所述输出臂中的每一者的所述头部部分限定了c形腔,所述c形腔接合所述中央元件的多于180度范围。
9.根据权利要求8所述的联动系统,其中,所述中央元件的第一侧部与第二侧部相对,并且所述中央元件的第三侧部与第四侧部相对,其中,所述输入臂的所述头部部分接触相对的所述第一侧部和所述第二侧部,并且所述输出臂的所述头部部分接触相对的所述第三侧部和所述第四侧部。
10.根据权利要求9所述的联动系统,其中,所述输入臂和所述输出臂中的每一者的所述头部部分包括限定外部面的喙状部,其中,所述外部面包括朝向所述外部面的端部部分汇聚的侧部。
11.根据权利要求10所述的联动系统,其中,所述喙状部在其端部部分处较薄。
12.根据权利要求1所述的联动系统,其中,所述输入臂和所述输出臂中的每一者的所述本体部分限定了适于连接至轴的开孔。
13.根据权利要求12所述的联动系统,其中,所述开孔包括带螺纹插孔。
14.根据权利要求1所述的联动系统,其中,所述头部部分的宽度等于所述中央元件的侧部中的相配合的一个侧部的宽度。
15.根据权利要求1所述的联动系统,其中,所述四个侧部、所述顶部和所述底部由相交于四个拐角处的四个支承表面限定。
16.根据权利要求15所述的联动系统,其中,所述拐角中的每个拐角包括从所述拐角中的相应一个拐角沿径向向内延伸的狭槽。
17.根据权利要求16所述的联动系统,其中,所述狭槽终止于扩大的开口处,所述扩大的开口的宽度比对应的狭槽的宽度大。
18.根据权利要求6所述的联动系统,其中,所述第一通道与所述输入臂的所述头部部分的所述支承表面相切。
19.根据权利要求18所述的联动系统,其中,所述第一保持销侧向地延伸穿过所述第一通道。
20.根据权利要求2所述的联动系统,其中,所述第二保持构件包括第二保持销。
21.一种转向柱,包括:
转向接合件;以及
根据权利要求1所述的联动系统,其中,所述转向接合件联接至所述输入臂。
22.一种用于组装联动组件的方法,包括:
将中央元件与输入臂的头部部分的c形腔对准,所述中央元件具有由第一半径限定的相对的第一支承表面和第二支承表面,其中,所述输入臂的所述头部部分的所述c形腔限定第三支承表面,其中,所述中央元件包括在投影平面图中限定椭圆形形状的四个侧部以及在投影平面图中限定大致矩形形状的顶部和底部,其中,所述中央元件包括在所述四个侧部中的至少一个侧部上沿着所述中央元件的外周的一部分延伸的第一槽以及在所述四个侧部中的其他侧部中的至少一个侧部上沿着所述中央元件的外周的一部分延伸的第二槽,其中,所述第一槽与所述第二槽偏移90度,并且其中,所述输入臂包括从所述头部部分纵向延伸的本体部分;
将所述中央元件滑动到所述输入臂的所述头部部分的所述c形腔中,使得所述第一支承表面和所述第二支承表面接合所述第三支承表面;
将第一销插入穿过所述输入臂的所述头部部分中的第一通道;
将所述第一销布置在绕所述中央元件的外周的至少一部分延伸的所述第一槽中;
将所述中央元件与输出臂的头部部分的c形腔对准,所述中央元件具有由第二半径限定的相对的第三支承表面和第四支承表面,其中,所述输出臂的所述头部部分的所述c形腔限定第五支承表面,并且其中,所述输出臂包括从所述输出臂的所述头部部分纵向延伸的本体部分;
将所述中央元件滑动到所述输出臂的所述头部部分的所述c形腔中,使得所述第三支承表面和所述第四支承表面接合所述第五支承表面;
将第二销插入穿过所述输出臂的所述头部部分中的第二通道;以及
将所述第二销布置在绕所述中央元件的外周的至少一部分延伸的所述第二槽中。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662276432P | 2016-01-08 | 2016-01-08 | |
| US62/276,432 | 2016-01-08 | ||
| US201662296338P | 2016-02-17 | 2016-02-17 | |
| US62/296,338 | 2016-02-17 | ||
| US201662396348P | 2016-09-19 | 2016-09-19 | |
| US62/396,348 | 2016-09-19 | ||
| PCT/US2017/012314 WO2017120321A1 (en) | 2016-01-08 | 2017-01-05 | Universal joint with central element |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107407340A CN107407340A (zh) | 2017-11-28 |
| CN107407340B true CN107407340B (zh) | 2021-02-02 |
Family
ID=59273948
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201780000404.2A Active CN107407340B (zh) | 2016-01-08 | 2017-01-05 | 具有中央元件的万向接头 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10443661B2 (zh) |
| EP (1) | EP3400391B1 (zh) |
| CN (1) | CN107407340B (zh) |
| HK (1) | HK1245376A1 (zh) |
| PL (1) | PL3400391T3 (zh) |
| WO (1) | WO2017120321A1 (zh) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016186657A1 (en) * | 2015-05-19 | 2016-11-24 | Halliburton Energy Services, Inc. | Constant-velocity joint with surface contact forks |
| US11639740B2 (en) | 2019-01-25 | 2023-05-02 | Encore Medical, L.P. | Universal joint assembly |
| DE102020102081A1 (de) * | 2020-01-29 | 2021-07-29 | Vat Holding Ag | Verbindungsvorrichtung zur Verbindung einer Ventilstange mit einem Verschlussglied eines Vakuumventils |
| CN112855788B (zh) * | 2021-01-22 | 2022-07-08 | 重庆长安汽车股份有限公司 | 一种可控制活动端轨迹曲率变化的万向节 |
| USD1057534S1 (en) * | 2022-04-25 | 2025-01-14 | Hong Ann Tool Industries Co., Ltd. | Universal joint |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US478811A (en) | 1892-07-12 | Universal joint | ||
| US608625A (en) | 1898-08-09 | Universal joint | ||
| US269473A (en) | 1882-12-19 | Universal joint | ||
| US761943A (en) * | 1903-11-24 | 1904-06-07 | James A Brown | Yieldable gear-wheel. |
| US1145400A (en) * | 1909-06-28 | 1915-07-06 | Adna G Bowen | Universal joint. |
| GB191003519A (en) * | 1910-02-12 | 1910-09-15 | Ariya Inokuty | Universal Coupling. |
| FR450767A (fr) | 1912-11-21 | 1913-04-03 | Automatic Enunciator Company | Appareil reproducteur et transmetteur de sons |
| GB191403519A (en) * | 1914-02-11 | 1914-10-15 | James Anderton | Improvements in Slubbing, Intermediate, Roving and like Machines used in the Production of Yarns or Threads of Fibrous Substances. |
| GB274345A (en) * | 1926-12-11 | 1927-07-21 | George Henry Walker | Improvements in universal joints |
| US2219591A (en) | 1938-03-11 | 1940-10-29 | Harry M Hiester | Universal joint |
| GB589513A (en) | 1945-03-23 | 1947-06-23 | Claud William Harris | Improvements in universal joints |
| US2641115A (en) * | 1949-03-12 | 1953-06-09 | Oliver Instr Company | Universal joint construction |
| US2954685A (en) | 1958-11-06 | 1960-10-04 | Cuq Auguste Pierre Jac Bernard | Universal joints |
| GB971401A (en) | 1962-10-04 | 1964-09-30 | Samuel Levi Collins | Improvements in and relating to ball type universal couplings,joints,flexible drive and/or control mechanisms |
| GB995526A (en) | 1964-03-09 | 1965-06-16 | Th Pernin & Fils | Improvements in or relating to universal joints |
| JPS5316859B2 (zh) * | 1973-06-26 | 1978-06-03 | ||
| SU480460A1 (ru) | 1974-01-28 | 1975-08-15 | Предприятие П/Я Р-6702 | Вкладыш универсального шарнира скольжени |
| AU509719B2 (en) | 1977-03-17 | 1980-05-22 | Clarence John Ellias Barry | Universal element |
| JPS5753124U (zh) * | 1980-09-11 | 1982-03-27 | ||
| JPH0297721A (ja) * | 1988-10-04 | 1990-04-10 | Plasma Syst:Kk | 軸継手 |
| US5423722A (en) * | 1993-05-27 | 1995-06-13 | General Motors Corporation | A steering shaft |
| US5440839A (en) | 1993-07-20 | 1995-08-15 | Truth Hardware Corporation | Window operator |
| JPH09133152A (ja) * | 1995-11-07 | 1997-05-20 | Nifco Inc | 自在継ぎ手 |
| KR19980038301U (ko) * | 1996-12-19 | 1998-09-15 | 박병재 | 유니버설 죠인트 |
| BG1062U1 (bg) | 2007-03-26 | 2008-05-30 | СТАТЕВ Николай | Шарнирен съединител |
| CN103161831A (zh) | 2011-12-15 | 2013-06-19 | 江南大学 | 新型万向联轴器 |
| JP5753124B2 (ja) * | 2012-05-18 | 2015-07-22 | 株式会社藤商事 | 遊技機 |
| RU2499918C1 (ru) * | 2012-07-17 | 2013-11-27 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Саратовский государственный технический университет имени Гагарина Ю.А." (СГТУ имени Гагарина Ю.А.) | Карданный механизм |
-
2017
- 2017-01-05 US US15/399,256 patent/US10443661B2/en active Active
- 2017-01-05 PL PL17736321T patent/PL3400391T3/pl unknown
- 2017-01-05 EP EP17736321.5A patent/EP3400391B1/en active Active
- 2017-01-05 CN CN201780000404.2A patent/CN107407340B/zh active Active
- 2017-01-05 WO PCT/US2017/012314 patent/WO2017120321A1/en active Application Filing
-
2018
- 2018-04-13 HK HK18104834.2A patent/HK1245376A1/zh unknown
Also Published As
| Publication number | Publication date |
|---|---|
| PL3400391T3 (pl) | 2022-06-20 |
| US20170211632A1 (en) | 2017-07-27 |
| EP3400391A4 (en) | 2019-09-04 |
| US10443661B2 (en) | 2019-10-15 |
| WO2017120321A1 (en) | 2017-07-13 |
| HK1245376A1 (zh) | 2018-08-24 |
| CN107407340A (zh) | 2017-11-28 |
| EP3400391B1 (en) | 2022-03-09 |
| EP3400391A1 (en) | 2018-11-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107407340B (zh) | 具有中央元件的万向接头 | |
| US8568245B2 (en) | Fixed type constant velocity universal joint | |
| US7201664B2 (en) | Fixed constant velocity joint | |
| EP1264114B1 (en) | Constant velocity joint having fixed centre and crossed grooves | |
| US20100069165A1 (en) | Opposed path joint | |
| GB2228303A (en) | Constant velocity ratio universal joint. | |
| JP3060340B2 (ja) | 回転式等速継手 | |
| CN107466341B (zh) | 三球销型等速万向联轴器 | |
| EP1031748A1 (en) | Constant velocity universal joint for propeller shaft | |
| EP1707835A1 (en) | Constant velocity joint | |
| EP2831437B1 (en) | Constant velocity joint | |
| US4229952A (en) | Homokinetic universal joint | |
| EP1881218A1 (en) | Fixed type constant velocity universal joint | |
| KR20210028239A (ko) | 등속 조인트 | |
| DE19751493C1 (de) | Gleichlauffestgelenk mit Steuerelement | |
| US6752721B2 (en) | Constant velocity universal joint | |
| US11280374B2 (en) | Joint assembly | |
| DE102007010083B4 (de) | Gleichlauffestgelenk, Übertragungsvorrichtung mit dem Gleichlauf-festgelenk sowie Verfahren zur Herstellung des Gleichlauffestgelenks | |
| US20230296130A1 (en) | Joint assembly | |
| RU2084715C1 (ru) | Устройство шарнирное самоустанавливающееся | |
| JP2010019345A (ja) | 固定型等速自在継手 | |
| EP2233763B1 (en) | Constant-velocity universal joint housing | |
| US20240035520A1 (en) | Counter track joint | |
| JP2009138906A (ja) | 固定型等速自在継手 | |
| JP2007113769A (ja) | 複合型等速自在継手 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| REG | Reference to a national code |
Ref country code: HK Ref legal event code: DE Ref document number: 1245376 Country of ref document: HK |
|
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |