CN107049159B - 拖擦件和清洁机器人系统 - Google Patents
拖擦件和清洁机器人系统 Download PDFInfo
- Publication number
- CN107049159B CN107049159B CN201611175802.1A CN201611175802A CN107049159B CN 107049159 B CN107049159 B CN 107049159B CN 201611175802 A CN201611175802 A CN 201611175802A CN 107049159 B CN107049159 B CN 107049159B
- Authority
- CN
- China
- Prior art keywords
- cleaning
- mopping
- unit
- ground
- piece
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








































Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/28—Floor-scrubbing machines, motor-driven
- A47L11/282—Floor-scrubbing machines, motor-driven having rotary tools
- A47L11/283—Floor-scrubbing machines, motor-driven having rotary tools the tools being disc brushes
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4013—Contaminants collecting devices, i.e. hoppers, tanks or the like
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4038—Disk shaped surface treating tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4061—Steering means; Means for avoiding obstacles; Details related to the place where the driver is accommodated
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02A—TECHNOLOGIES FOR ADAPTATION TO CLIMATE CHANGE
- Y02A20/00—Water conservation; Efficient water supply; Efficient water use
- Y02A20/20—Controlling water pollution; Waste water treatment
- Y02A20/204—Keeping clear the surface of open water from oil spills
Abstract
本发明涉及清洁机器人技术领域,特别涉及一种拖擦件和清洁机器人。本发明所提供的拖擦件,包括用于拖擦地面的拖擦件主体及设置在拖擦件主体边沿且用于清扫地面垃圾的清扫件,这样可以使得包含该拖擦件的拖擦单元自身即成为扫拖一体结构,兼具扫拖功能,即使不再额外设置专门的清扫装置,拖擦单元自身也能够将垃圾充分地聚集起来,实现更好的清洁效果;并且,设置在拖擦件主体边沿的清扫件,还可以在拖擦单元清洁地面边沿的时候紧贴地面边沿,有效扩大拖擦单元的清洁范围,使得清洁机器人能够更有效地完成对室内角落的清洁。
Description
技术领域
本发明涉及清洁机器人技术领域,特别涉及一种清洁机器人和清洁机器人系统。
背景技术
近年来,随着社会经济的发展以及家庭生活水平的提高,家具清洁逐步进入智能化、机器化的时代,应运而生的清洁机器人能够将人们从家居清洁工作中解放出来,有效减轻人们在家居清洁方面的工作负担,缓解人们在进行家居清洁过程中的劳累程度。
现有的一些清洁机器人只能实现清扫功能,而无法实现拖地功能,难以有效清除附着于地面上的顽固污渍,地面清洁效果不理想。而且,现有的清洁机器人,其拖擦件的清洁需要由用户来完成,在清洁地面的整个过程中,用户需要频繁参与换洗清洁机器人的拖擦件,这一方面会导致无法将用户从拖地过程中彻底解放出来,增加用户的工作量,另一方面也容易因换洗不及时而影响拖擦效果,导致无法将地面清洁干净。
现有的扫拖一体机,最常见的是在扫地机的基础上加上一块湿的抹布,如科沃斯的地宝朵朵。这种扫拖一体机最大的问题是机器人没有办法自动地清洗或者更换抹布。而一块抹布不可能清洁整个房屋,所以整个清洁过程都需要用户频繁参与更换和清洁机器人的抹布。在清洁过程中,机器人利用自身的重力压住抹布紧贴地面,拖动抹布摩擦地面进行清洁。抹布与地面的相对运动仅仅是由机器人自身的移动形成,所以地面与拖布的相对运动较少,无法达到反复擦拭地面的效果,所以清洁效果较差。
并且,湿的抹布只能用来拖擦地面,需设置专门的清扫装置实现清扫功能,因此,使得该类具有扫拖一体功能的清洁机器人结构复杂,体积较大,不利于实现清洁机器人的小型化和灵巧化。
发明内容
本发明所要解决的一个技术问题是:现有的扫拖一体的清洁机器人需设置专门的清扫装置实现清扫功能,使得该类具有扫拖一体功能的清洁机器人结构复杂、体积较大,地面清洁效果不理想。
为了解决上述技术问题,本发明第一方面提供了一种拖擦件,用于清洁机器人拖擦及清扫地面。该拖擦件包括用于拖擦地面的拖擦件主体及设置在所述拖擦件主体边沿且用于清扫地面垃圾的清扫件。
可选地,所述清扫件由易甩干且不易变形的清洁材料制成。
可选地,所述清扫件的清洁材料包括毛刷、竹纤维、尼龙刷、涤纶、锦纶和涤纶与锦纶的复合材料中的至少一种。
可选地,所述拖擦件主体包括中部清洁部件及设置在所述中部清洁部件一侧表面的吸水部件。
可选地,所述中部清洁部件由第一清洁材料、第二清洁材料、第三清洁材料和第四清洁材料中的至少一种制成;
所述第一清洁材料为用于清洁顽固的地面污渍的清洁材料;
所述第二清洁材料为用于收集灰尘及毛发的清洁材料;
所述第三清洁材料为用于清洁地面凹处的污渍和垃圾的清洁材料;
所述第四清洁材料为用于清洁污垢及油渍的清洁材料。
可选地,所述第一清洁材料包括木浆海绵、网眼抹布、钢丝网、尼龙纤维、聚酯纤维、金刚砂、百洁布及塑料网布中的至少一种;
所述第二清洁材料包括超细纤维、能水洗清洁的粘毛除尘TPR材料、除尘刷、粘毛布料、静电除尘布料、棉布、涤纶、锦纶及涤纶与锦纶的复合材料中的至少一种;
所述第三清洁材料包括尼龙毛刷、椰棕刷及细短毛的拖布中的至少一种;
所述第四清洁材料包括植物纤维与棉纱复合材料中的至少一种。
可选地,所述中部清洁部件包括第一清洁部及第二清洁部,所述第一清洁部由所述第一清洁材料、第二清洁材料、第三清洁材料和第四清洁材料中的一种制成,所述第二清洁部由所述第一清洁材料、第二清洁材料、第三清洁材料和第四清洁材料中的不同于所述第一清洁部的另一种制成。
可选地,所述第二清洁部在所述第一清洁部上设置有多个,多个所述第二清洁部在所述第一清洁部呈点状阵列排布或者是沿圆周间隔排布;或者,所述第一清洁部与第二清洁部均设置有多个,且多个第一清洁部与第二清洁部交替排布。
可选地,所述拖擦件主体呈圆形,所述清扫件沿所述拖擦件主体的圆形边沿设置。
本发明另一方面还提供了一种清洁机器人。该清洁机器人包括用于驱动所述清洁机器人在地面上行走的行走装置、用于对地面进行清洁的地面清洁装置以及垃圾收集装置,所述地面清洁装置包括拖擦装置,所述拖擦装置包括一个至少一个拖擦单元及拖擦驱动机构,所述拖擦单元包括上述的拖擦件,在所述拖擦驱动机构的驱动作用下,所述至少一个拖擦单元上的拖擦件能够相对于该清洁机器人的底盘绕竖直轴线转动,所述垃圾收集装置包括用于连通所述垃圾收集装置内部与外部的收集口,所述收集口设置在所述至少一个拖擦单元的垃圾聚集路径上,以便于所述垃圾收集装置收集被所述绕竖直轴线转动的至少一个拖擦单元的拖擦件所聚集的垃圾。
可选地,所述拖擦装置包括两个拖擦单元,在所述拖擦驱动机构的驱动作用下,所述两个拖擦单元的拖擦件能够相对于该清洁机器人的底盘绕竖直轴线同向或反向转动,所述收集口设置在所述两个拖擦单元的中部,以便于所述垃圾收集装置收集被所述绕竖直轴线同向或反向转动的两个拖擦单元的拖擦件所聚集的垃圾。
可选地,所述拖擦装置包括一个拖擦单元,在所述拖擦驱动机构的驱动作用下,所述一个拖擦单元上的拖擦件能够相对于该清洁机器人的底盘绕竖直轴线转动,所述收集口设置在所述一个拖擦单元的边缘外侧,以便于所述垃圾收集装置收集被所述绕竖直轴线转动的一个拖擦单元的拖擦件所聚集的垃圾。
可选地,所述拖擦单元和/或行走装置可摆动地连接于所述清洁机器人的底盘上,以使所述拖擦单元的拖擦件能够通过随着地面的凹凸不平进行摆动来保持与地面接触。
本发明的用于清洁机器人拖擦及清扫地面的拖擦件,包括用于拖擦地面的拖擦件主体及设置在拖擦件主体边沿且用于清扫地面垃圾的清扫件,这样可以使得包含该拖擦件的拖擦单元自身即成为扫拖一体结构,兼具扫拖功能,即使不再额外设置专门的清扫装置,拖擦单元自身也能够将垃圾充分地聚集起来,实现更好的清洁效果;并且,设置在拖擦件主体边沿的清扫件,还可以在拖擦单元清洁地面边沿的时候紧贴地面边沿,有效扩大拖擦单元的清洁范围,使得清洁机器人能够更有效地完成对室内角落的清洁。
本发明的清洁机器人,拖擦单元上的拖擦件能够相对于该清洁机器人的底盘绕竖直轴线转动,且垃圾收集装置的收集口设置在至少一个拖擦单元的垃圾聚集路径上。这样在拖擦过程中,拖擦件与地面之间的相对运动不仅包括清洁机器人整体在地面上的移动,还包括拖擦件相对于地面的旋转运动,从而可以增强拖擦的拖擦力度,并增多拖擦件的拖擦次数,实现对地面的反复拖擦,进而可以改善拖擦件的拖擦效果。另外,旋转的拖擦件还能够扫起地面上的大颗粒物及灰尘等垃圾,以便于垃圾收集装置收集被绕竖直轴线转动的至少一个拖擦单元的拖擦件所聚集的垃圾,即旋转的拖擦件同时起到清扫作用,使得该清洁机器人成为扫拖一体机器人,功能更加全面,地面清洁效果更佳,且由于无需设置专门的清扫装置即可实现清扫功能,因此,也使得清洁机器人可以在具有扫拖一体功能的同时具有更简单的结构和更小的体积,有利于进一步实现清洁机器人的小型化和灵巧化。
通过以下参照附图对本发明的示例性实施例进行详细描述,本发明的其它特征及其优点将会变得清楚。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1示出第一实施例的清洁机器人整体结构的俯视立体图。
图2示出第一实施例的清洁机器人整体结构的仰视立体图。
图3示出第一实施例的清洁机器人爆炸结构示意图。
图4示出图1所示清洁机器人去除上壳体和处理电路后的结构示意图。
图5示出在图4的基础上进一步去除风机和风机导管后的结构示意图。
图6示出图1所示清洁机器人的拖擦装置的整体结构示意图。
图7示出图6的爆炸结构示意图。
图8示出图7中拖擦件在柔性连接块及水平转动轴作用下的摆动自由度。
图9示出图6所示拖擦装置去除水平转动轴后的结构示意图。
图10示出图9中拖擦件在柔性连接块作用下的摆动自由度。
图11示出图8的第一变型例。
图12示出图8的第二变型例。
图13示出图8的第三变型例。
图14示出图1所示清洁机器人的垃圾收集装置的风道示意图。
图15示出图1所示清洁机器人的拖擦装置与垃圾收集装置的位置关系示意图。
图16示出第二实施例的清洁机器人整体结构示意图。
图17示出图16的爆炸结构示意图。
图18示出图16所示清洁机器人去除上壳体和上壳封盖之后的结构示意图。
图19示出图16所示清洁机器人去除下壳封盖后的结构示意图。
图20示出图19所示拖擦装置的爆炸结构示意图。
图21a示出图20中输出轴与拖擦单元的组装结构剖视图。
图21b示出图21a中的I局部放大示意图。
图21c示出图21b中的II局部放大示意图。
图22示出第二实施例中垃圾收集装置的爆炸结构示意图(省略除尘风机)。
图23示出第二实施例中垃圾收集装置的风道示意图。
图24示出第一实施例和第二实施例中吸尘口与拖擦装置位置关系的一种变型。
图25示出第一实施例和第二实施例的另一种变型。
图26示出第三实施例的清洁机器人的整体结构仰视立体图。
图27示出图26所示清洁机器人去除上壳体之后的结构示意图。
图28示出图第三实施例中吸尘口与拖擦装置位置关系的示意图。
图29示出上述实施例中的拖擦件的侧视图。
图30示出上述实施例中的拖擦件的仰视图。
图31示出图29所示的拖擦件的第一种变型的侧视图。
图32示出图29所示的拖擦件的第一种变型的仰视图。
图33示出图29所示的拖擦件的第二种变型的侧视图。
图34示出图29所示的拖擦件的第二种变型的仰视图。
图35示出图29所示的拖擦件的第三种变型的侧视图。
图36示出图29所示的拖擦件的第三种变型的仰视图。
图37示出行走轮处设有悬挂装置的清洁机器人的结构简图。
图38示出图37中的III局部放大示意图。
图39示出了本发明第一实施例的改进实施例中清洁机器人的底部的局部示意图。
图40示出了本发明图39所示实施例的清洁机器人的底部不同于图39的视角的局部示意图。
图中:
2、清洁机器人;
20、壳体;201、上壳体;2011、上壳封盖;202、底盘;2021、下壳封盖;203、避让槽;
21、行走装置;211、行走轮;212、弹簧;213、支撑件;
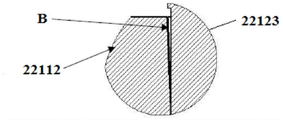
22、地面清洁装置;221、拖擦装置;2211、拖擦单元;22111、拖擦件;22112、压盘;2212、拖擦驱动机构;22121、双头蜗杆电机;22121’、单头蜗杆电机;22122、蜗轮;22123、输出轴;22124、轴承;22125、油封圈;2213、安装底盘;2214、上盘;2215、下盘;2216、柔性连接块;2217、磁性吸附件;2218、水平转动轴;2219、刮挡结构;
23、垃圾收集装置;231、灰尘盒;2313、盒体;2314、盒盖;2315、把手;2316、定位销;233、滤网;233’、海帕纸;2331’、海帕纸支架;234、除尘风机;235、风机导管;236、吸尘口;237、垃圾阻挡件;238、过滤架;
24、顶起机构;
25、碰撞感应板;251、摄像头;252、充电触片;
26、激光雷达;261、雷达保护盖;
27、控制装置;
28、电池。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有开展创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。
在本发明的描述中,需要理解的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本发明保护范围的限制。
另外,在本发明的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于清洁机器人系统正常使用的状态定义的,其中,以清洁机器人的前进方向为前,相应地,以清洁机器人的后退方向为后;方位词“内、外”是指相对于各部件本身的轮廓的内外。
参照图1-31,本发明的清洁机器人2,其包括用于驱动清洁机器人2在地面上行走的行走装置21以及用于对地面进行清洁的地面清洁装置22,地面清洁装置22包括拖擦装置221,拖擦装置221包括拖擦单元2211,拖擦单元2211包括拖擦件22111,拖擦件22111用于拖擦和清扫地面。
本发明的清洁机器人2,其包括用于拖擦和清扫地面的拖擦件22111,因此,能够实现拖地和清扫功能,可以清除地面上的顽固污渍,可以改善地面清洁效果。
在本发明中,为了进一步改善拖地效果,拖擦单元2211设置为能够相对于清洁机器人2的底盘202转动。这样在拖擦过程中,拖擦件22111与地面之间的相对运动不仅包括清洁机器人2整体在地面上的移动,还包括拖擦件22111相对于地面的旋转运动,从而可以增强拖擦件22111的拖擦力度,并增多拖擦件22111的拖擦次数,实现对地面的反复拖擦,进而可以改善拖擦件22111的拖擦效果,其中尤其有助于更彻底地清洁粘附于地面上的顽固污渍。旋转的拖擦件22111还能够扫起地面上的大颗粒物及灰尘等垃圾,也即同时起到清扫作用,使得清洁机器人2成为扫拖一体机器人,功能更加全面,地面清洁效果更佳,且由于无需设置专门的清扫装置222即可实现清扫功能,因此,也使得清洁机器人2可以在具有扫拖一体功能的同时具有更简单的结构和更小的体积,有利于进一步实现清洁机器人2的小型化和灵巧化。
下面结合图1-31中所示的清洁机器人的各实施例来对本发明进行进一步地说明。
图1-15、图29-32示出了该第一实施例中的清洁机器人2的结构。
如图1-15所示,在该第一实施例中,清洁机器人2为一个移动清洁设备,其包括壳体20、行走装置21、地面清洁装置22和垃圾收集装置23等。
其中,壳体20构成清洁机器人2的其他结构部件的安装基础,为其他部件提供支撑。由图1-3可知,该实施例的壳体20包括上壳体201和底盘202,行走装置21、地面清洁装置22和垃圾收集装置23等均安装于底盘202上,上壳体201则罩设于底盘202上方,用于保护上壳体201与底盘202之间的中空空间内的结构部件,并保持整体结构的整齐和美观。
行走装置21用于为清洁机器人2在地面上的移动提供驱动力,驱动清洁机器人2在地面上行走。由图2和图3可知,该实施例的行走装置21包括一对行走轮211,这一对行走轮211对称地设置在底盘2的左右两侧,行走轮211转动,能够实现清洁机器人2在地面上的前进或后退。并且,通过一对行走轮211的差速转动,能够实现清洁机器人2的转向。
地面清洁装置22用于对地面进行清洁。在该实施例中,地面清洁装置22包括拖擦装置221,该拖擦装置221包括一对拖擦单元2211,且每个拖擦单元2211均包括压盘22112和拖擦件22111,拖擦件22111安装于压盘22112的下端面上,用于拖擦和清扫地面。
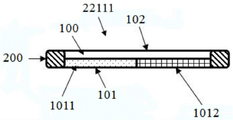
如图29-30所示,该拖擦件22111包括用于拖擦地面的拖擦件主体100及设置在所述拖擦件主体100边沿且用于清扫地面垃圾的清扫件200。这样,可以使得包含该拖擦件22111的拖擦单元2211自身即成为扫拖一体结构,兼具扫拖功能,即使不再额外设置专门的清扫装置,拖擦单元2211自身也能够将垃圾(尤其是毛发等垃圾)更充分地聚集起来,实现更好的清洁效果;并且,设置在拖擦件主体100边沿的清扫件200,还可以在拖擦单元2211清洁地面边沿的时候紧贴地面边沿,有效扩大拖擦单元2211的清洁范围,使得清洁机器人2能够更有效地完成对室内角落的清洁。
清扫件200有两个功能,一个功能是用于将垃圾收集到一边(汇聚垃圾),另一个功能是清洁物体的边沿位置。所以清扫件200选择易甩干且不易变形的清洁材料。
本实施例中,所述清扫件200的清洁材料包括毛刷、竹纤维、尼龙刷、涤纶、锦纶和涤纶与锦纶的复合材料中的至少一种。清扫件200沿拖擦件主体100的边沿均匀间隔设置或者是连续设置。
另外,如图29-30所示,所述拖擦件主体100包括中部清洁部件101及设置在所述中部清洁部件101一侧表面的吸水部件102。吸水部件102由海绵、拖布等吸水能力强的材料制成。
本实施例中,所述中部清洁部件101由第一清洁材料、第二清洁材料、第三清洁材料和第四清洁材料中的至少一种制成;其中,所述第一清洁材料为用于清洁顽固的地面污渍的清洁材料;所述第二清洁材料为用于收集灰尘及毛发的清洁材料;所述第三清洁材料为用于清洁地面凹处的污渍和垃圾的清洁材料;所述第四清洁材料为用于清洁污垢及油渍的清洁材料。
本实施例中,所述第一清洁材料包括木浆海绵、网眼抹布、钢丝网、尼龙纤维、聚酯纤维、金刚砂、椰棕刷、百洁布及塑料网布中的至少一种;所述第二清洁材料包括超细纤维、静电除尘布料、棉布、涤纶与锦纶的复合材料中的至少一种;所述第三清洁材料包括尼龙毛刷及细短毛拖布中的至少一种;所述第四清洁材料包括植物纤维与棉纱复合材料中的至少一种。
拖擦件22111的中部清洁部件101可以在设计中加入不同的清洁材料以达到综合的清洁效果。
例如,在图29至图30所示的实施例中,中部清洁部件101仅由第一清洁材料、第二清洁材料、第三清洁材料和第四清洁材料中的一种制成。
再例如,在图31至图32所示的实施例中(第一变型例),所述中部清洁部件101包括第一清洁部1011及第二清洁部1012,所述第一清洁部1011由所述第一清洁材料、第二清洁材料、第三清洁材料和第四清洁材料中的一种制成,所述第二清洁部1012由所述第一清洁材料、第二清洁材料、第三清洁材料和第四清洁材料中的不同于所述第一清洁部1011的另一种制成。
如图32所示,所述第二清洁部1012在所述第一清洁部1011上设置有多个。
优选地,所述拖擦件主体100呈圆形,所述清扫件200沿所述拖擦件主体100的圆形边沿设置。图32中,每一所述第二清洁部1012沿所述拖擦件主体100的径向延伸,且,多个所述第二清洁部1012沿所述拖擦件主体100的圆周方向均匀间隔排布。图32中,第二清洁部1012设置有三个,然而,根据实际需要也可以是一个、两个或四个以上。
再例如,在图33至图34所示的实施例中(第二变型例),所述第二清洁部1011在所述第一清洁部1011呈点状阵列排布。
再例如,在图35至图36所示的实施例中(第三变型例),所述第一清洁部与第二清洁部均设置有多个,且多个第一清洁部1011与第二清洁部1012交替排布。
另外,在其它未图示的实施例中,拖擦件22111的中部清洁部件101也可以是由三部分或四部分组成,即,中部清洁部件101还可以设置材料不同于第一清洁部1011及第二清洁部1012的第三清洁部件,和/或设置材料不同于第一清洁部1011、第二清洁部1012、第三清洁部件的第四清洁部件,通过在拖擦件22111的中部清洁部件101加入不同的清洁材料以达到综合的清洁效果,以实现对地面垃圾全面而有效的清理。
而且,拖擦件22111优选与压盘22112可拆卸连接,例如,在该实施例中,可以利用魔术贴将拖擦件22111粘贴于压盘22112的下端面上,以便于拆装更换拖擦件22111。
该实施例的拖擦件22111和压盘22112均呈圆形,当然,在其他实施例中,二者也可以设置为长方形等其他形状,而该实施例将二者的形状设置为圆形的好处在于,更便于拖擦单元2211对屋内的角落等狭小空间进行清洁,且也更便于如下的转动设置。
为了进一步解决现有的清洁机器人拖擦效果较差的问题,由图2-图7以及图15可知,如前所述,该实施例的拖擦单元2211设置为能够相对于底盘202进行转动,通过增加拖擦单元2211与地面的相对转动来改善拖地效果。此处拖擦单元2211相对于底盘202的转动,为绕竖直轴线的转动,绕竖直轴线转动的拖擦件22111可以实现更佳的拖擦及清扫效果。并且,当拖擦装置221包括至少两个拖擦单元2211时,至少两个拖擦单元2211可以转向相同,也可以转向不同,还可以可切换地进行同向转动和反向转动,也即某一段时间内这至少两个拖擦单元221反向转动而另一段时间内又改变为反向转动。其中,通过将成对儿的拖擦单元2211设置为绕竖直轴线反向转动,还能够使拖擦装置221起到将垃圾向中间聚集的作用,实现更好的垃圾聚集效果。
如图15所示,在该实施例中,两个拖擦单元2211均绕竖直轴线转动,但转动方向相反。由于绕竖直轴线反向转动,两个拖擦单元2211可以将扫起的垃圾向两个拖擦单元2211的中间聚集,因此,该设置使得拖擦装置221在实现拖擦及清扫功能的同时,还能起到较好的垃圾聚集作用,便于更充分彻底地收集垃圾。基于此,该实施例的拖擦装置221可以与该实施例的垃圾收集装置23配合实现更洁净的清洁效果,这一点将在后面进行更为详细地说明。另外,两个拖擦单元2211设置为绕竖直轴线反向转动时,两个拖擦单元2211因旋转产生的摩擦力方向相反,可以相互抵消,能够有效避免在清洁过程中出现摩擦力不平衡问题,有助于使清洁机器人2更平稳地按照预定路线行走。
而为了实现拖擦单元2211相对地面的转动,该实施例的拖擦装置221还包括拖擦驱动机构2212,该拖擦驱动机构2212连接拖擦单元2211与底盘202,并用于驱动拖擦单元2211相对于底盘202进行转动,也即用于驱动拖擦单元2211相对于地面进行转动。具体地,如图3-7所示,在该实施例中,拖擦驱动机构2212包括蜗杆电机、两个蜗轮22122和两个输出轴22123,其中:蜗杆电机用于为两个拖擦单元2211提供转矩;两个蜗轮22122与两个输出轴22123一一对应地驱动连接于蜗杆电机与两个输出轴22123之间,每个蜗轮22122与蜗杆电机上的蜗杆啮合,即蜗轮22122与蜗杆电机上的蜗杆形成蜗轮蜗杆机构,且两个蜗轮22122与蜗杆电机的蜗杆啮合传动,从而能够向两个输出轴22123传递方向相反的转矩;两个输出轴22123驱动连接于两个蜗轮22122与两个拖擦单元2211之间,且两个输出轴22123与两个拖擦单元2211一一对应设置,用于将方向相反的转矩分别传递至两个拖擦单元2211,同时,两个输出轴22123均竖向布置,这样两个拖擦单元2211在蜗杆电机的驱动作用下绕着各自的输出轴22123转动,即能够实现两个拖擦单元2211绕竖直轴线的反向转动。
更具体地,如图7所示,在该实施例中,蜗杆电机为双头蜗杆电机22121,其中:双头蜗杆电机22121用作蜗杆动力机构,用于输出转矩;两个蜗轮22122与两个拖擦单元2211一一对应设置,并分别与双头蜗杆电机22121的两侧的两个蜗杆头啮合,且两个蜗轮22122与双头蜗杆电机22121啮合传动。这样当双头蜗杆电机22121转动时,动力可以传递至两个蜗轮22122,并通过两个蜗轮22122向两个输出轴22123传递方向相反的转矩,驱动两个输出轴22123带动两个拖擦单元2211绕竖直轴线反向转动,结构简单紧凑,且传动效率高。
并且,由图6和图7可知,该实施例的拖擦装置221还包括安装底盘2213、上盘2214、下盘2215,拖擦驱动机构2212通过安装底盘2213、上盘2214、下盘2215安装于底盘202上。其中,上盘2214和下盘2215相互扣合,形成一个中空空间,拖擦驱动机构2212的各部件设置于该中空空间中进行配合传动,而安装底盘2213设置于底盘202上,且下盘2215安装于安装底盘2213上,使得拖擦驱动机构2212被安装于底盘202上。另外,该实施例的拖擦驱动机构2212还包括轴承22124和油封圈22125,其中,轴承22124和油封圈22125设置于输出轴22123与蜗轮22122之间,实现更为顺畅地传动。
另外,在该实施例中,拖擦单元2211可摆动地连接于清洁机器人2的底盘202上,通过使两个拖擦件22111时刻紧贴地面来改善拖擦装置221的拖擦效果,并扩大清洁机器人2的适用范围。
具体地,该实施例的拖擦单元2211不仅能够以竖直轴线为中心进行摆动,还可以以水平轴线为中心进行摆动,这样拖擦件22111具有多个摆动自由度,有利于实现整个拖擦件22111与地面的时刻接触,使拖擦件22111可以更好地适应凹凸不平的地面,实现更洁净的清洁效果。
其中,为了实现拖擦单元2211以竖直轴线为中心的摆动,在该实施例中,如图7所示,拖擦单元2211与拖擦驱动机构2212的输出轴22123之间设有柔性连接块2216,二者通过该柔性连接块2216连接。柔性连接块2216可以与拖擦单元2211和/或拖擦驱动机构2212可拆卸连接。由于作为一种柔性连接结构,柔性连接块2216能够较自由地产生变形,因此,当清洁机器人2遇到凹凸不平的地面时,柔性连接块2216能够在拖擦件22111所传递的地面作用力的作用下产生适应性变形,带动拖擦单元2211整体相对于底盘202(也即相对于地面)产生以竖向布置的输出轴22123为中心的适应性摆动,进而保持与地面的接触。而且,如图6、图8和图10所示,每个柔性连接块2216可以为对应的拖擦单元2211提供摆动的调整自由度(即图8中的第一摆动自由度I),摆动方式更加多样,可以更灵活地适应地面。
可见,通过在输出轴22123与拖擦单元2211之间设置柔性连接块2216,可以利用柔性连接块2216的材料变形来实现拖擦单元2211以竖直轴线为中心的摆动,且可以根据地面凹凸不平的程度来灵活调整拖擦单元2211的摆动角度,从而使拖擦件22111时刻贴合于地面上进行拖擦,进一步改善拖擦效果。
需要说明的是,应用于该实施例的柔性连接结构并不局限于柔性连接块2216这一种形式,能够利用自身材料的变形来实现拖擦单元2211的摆动的其它柔性连接结构也同样适用。
而为了实现拖擦单元2211以水平轴线为中心的摆动,在该实施例中,拖擦装置221与底盘202之间设有水平转动轴2218,二者通过该水平转动轴2218连接。具体地,如图7和图8所示,该实施例的水平转动轴2218连接于底盘202与拖擦装置221的连接于两个拖擦单元2211之间的传动轴的中部之间。该水平转动轴2218可以为每个拖擦单元2211提供一个水平旋转自由度(即图8所示的第二摆动自由度J),使得每个拖擦单元2211可以随着地面的凹凸不平而以该水平转动轴2218为中心进行摆动,从而保证拖擦件22111与地面进行接触。
可见,该实施例通过同时设置柔性连接块2216和水平转动轴2218,使得拖擦件22111具有多个摆动自由度,可以更灵活地适应凹凸不平的地面,使得清洁机器人2即使遇到不平的地形也能让拖擦件22111紧贴地面进行清洁,从而可以将地面清洁得更加干净。
另一方面,由图8可知,在该实施例中,由于拖擦装置221与底盘202之间设有水平转动轴2218,因此拖擦装置221与地面的接触相当于一个支点,也即该实施例的拖擦装置221提供给清洁机器人2一个支点,同时,由于两个行走轮211与地面的接触相当于两个支点,因此,整体上,该实施例的清洁机器人2与地面之间形成三点支撑方式,这使得该清洁机器人2可以时刻三点着地,从而能够增加清洁机器人2的整体运行稳定性,进一步保证清洁效果。
需要说明的是,使拖擦单元221随着地面不平进行摆动的实施方式并不局限于上述方式(即图8所示方式),此处提供三种替代实施方式。
作为其中的一种替代方式,如图11所示,还可以改变水平转动轴2218的设置位置,将水平转动轴2218设置于行走装置21与底盘202之间。基于这种替代方式,行走装置21与底盘202之间采用旋转轴连接方式,行走装置21整体为清洁机器人2提供一个支点,同时,拖擦装置221的每个柔性连接块2216为每个拖擦单元2211提供两个摆动的调整自由度,使得拖擦装置221与地面接触时相当于两个支点与地面接触,也即拖擦装置221为清洁机器人2提供两个支点,可见,该替代方式仍然能使拖擦件22111时刻紧贴地面,并使清洁机器人2与地面之间形成三点支撑方式。在该替代方式中的三点支撑包括前方的两个支点和后方的一个支点,而图8所示的方式中的三点支撑包括前方的一个支点和后方的两个支点。
作为其中的另两种替代方式,如图12和图13所示,在该实施例中,还可以省略前述的柔性连接块2216,而只在拖擦装置221与底盘202之间设置水平转动轴2218,或者,只在行走装置21与底盘202之间设置水平转动轴2218。采用这两种替代方式,虽然使拖擦件22111时刻紧贴地面的效果不如拖擦单元2211同时以竖直轴线为中心摆动的情形,但仍然能够实现拖擦件22111和/或行走装置21相对于底盘202的整体摆动,形成前述三点支撑,并且结构更简单,成本也较低。
垃圾收集装置23用于收集被地面清洁装置22所聚集的垃圾,其包括用于连通垃圾收集装置23内部与外部的收集口,被地面清洁装置22所聚集的垃圾从该收集口进入垃圾收集装置23的内部。
如图2-4及图14所示,在该实施例中,垃圾收集装置23包括灰尘盒231、滤网233、除尘风机234、风机导管235和吸尘口236,其中:灰尘盒231包括盒体2313和盒盖2314,盒盖2314盖合在盒体2313的顶端开口处;吸尘口236设置在灰尘盒231的下部,朝向地面开口,以使垃圾能够经由该吸尘口236进入灰尘盒231内;除尘风机234通过风机导管235与灰尘盒231内部流体连通,以使灰尘等垃圾能够在除尘风机234的作用下由吸尘口236进入灰尘盒231;滤网233则设置在灰尘盒231的侧部并位于除尘风机234与灰尘盒231的流体连通通路上(在图14中滤网233具体设置在风机导管235与灰尘盒231的流体连通通路上),以使风中的垃圾能够被滤网233过滤而留在灰尘盒231中,而风可以继续被除尘风机234抽走。
如图14所示,除尘风机234的出口朝向双头蜗杆电机22121,这样由除尘风机234流出的风可以直接吹向双头蜗杆电机22121,对双头蜗杆电机22121进行散热,有利于保证双头蜗杆电机22121的工作性能,延长双头蜗杆电机22121的工作寿命。
在一改型实施中,将所述拖擦驱动机构布置于吸尘装置的两侧,以使得吸尘装置能够整体沿清洁机器人2的前后方向延伸。例如,可将双头蜗杆电机22121替换为两个电机,两个电机通过蜗轮蜗杆机构或齿轮机构输出动力。这样,便于将两个电机分别布置在吸尘装置的两侧,避免了因电机转轴横穿吸尘装置而对吸尘装置造成阻挡,可以使吸尘装置风路更加顺畅,减小吸尘装置的进风阻力,增大吸尘装置的进风流量,改善吸尘装置的吸尘效果。
该实施例的垃圾收集装置23在工作时,除尘风机234驱动风带动垃圾经由吸尘口236进入盒体2313内部,垃圾被滤网233挡住,而风则经过滤网233进入风机导管235,流向除尘风机234,并最终由除尘风机234抽走。
可见,该实施例的垃圾收集装置23为吸尘装置,吸尘口236用作收集口。该实施例采用吸尘装置作为垃圾收集装置23的好处在于,垃圾收集装置23能够对垃圾施加吸引力,这不仅可以使更多被地面清洁装置22聚集的垃圾被更快速地收集起来,减少垃圾在地面上的残留,并且在吸力作用下,较大颗粒的垃圾也可以被吸至垃圾收集装置23内部,因此,采用吸尘装置作为垃圾收集装置23有利于将地面清洁得更加干净。
另外,如前所述,在该实施例中,绕竖直轴线反向转动的两个拖擦单元2211能够将垃圾聚集到两个拖擦单元2211之间,因此,为了更方便有效地收集垃圾,如图2和图15所示,在该实施例中,吸尘口236设置在该实施例拖擦装置221的两个拖擦单元2211的中部,这样,吸尘口236位于两个拖擦单元2211之间,处于垃圾被聚集的路径上,因此,垃圾收集装置23可以更充分地对垃圾进行收集,实现更有效的垃圾收集效果。其中,吸尘口236既可以设置在两个拖擦单元2211的后方的中部,也可以设置在两个拖擦单元2211的前方的中部。将吸尘口236设置在两个拖擦单元2211的后方的中部,如图36所示,由于垃圾被聚集到一个更小的区域后再被垃圾收集装置23收集,因此吸尘口236可以设置地较小,而吸尘口236越小,吸力越大,可以实现更有效地收集。而将吸尘口236设置在两个拖擦单元2211的前方的中部,如图2和图15所示,其好处在于,可以使得垃圾收集在拖擦之前进行,垃圾能够在未被拖擦件22111弄湿的情况下即被收集起来,由于未被沾湿的垃圾对地面的附着力较小,更易被收集,因此,将吸尘口236设置在绕竖直轴线反向旋转的两个拖擦单元2211的前方的中部,可以降低垃圾收集难度,使得吸尘装置只需施加较小的吸力即可实现对垃圾的收集,并且可以有效防止出现毛发等垃圾因过湿而难以被收集的问题,从而可以更方便彻底地收集垃圾,实现更干净的垃圾收集效果。
基于上述拖擦装置221和垃圾收集装置23,当该实施例的清洁机器人2能够进行更高质量的地面清洁工作:工作时,贴地的两个拖擦件2111在拖擦驱动机构2212的驱动作用下绕竖直轴线反向转动,一方面对地面上的顽固污渍进行拖擦,另一方面将垃圾聚集到两个拖擦件2111的中间部位,被聚集到中间部位的垃圾由垃圾收集装置23吸起收集。
而且,结合图39和图40还可以得知,在上述实施例的清洁机器人2中,垃圾收集装置23均还包括挡板2311,该挡板2311由垃圾收集装置23的收集口(在该实施例中即为吸尘口236)向下倾斜并延伸至地面。基于此,该挡板2311能够对聚集至其所在位置的垃圾进行阻挡,防止被地面清洁装置22清洁出的垃圾扩散至收集口(吸尘口236)能够收集的范围之外,从而更便于垃圾收集装置23进行收集,并防止垃圾对清洁过的地面造成二次污染。特别是,当拖擦件22111相对于该清洁机器人2的底盘202绕竖直轴线转动进行清扫作业时,该挡板2311能够避免汇聚的垃圾被拖擦件22111带离收集口(吸尘口236)。
当然,该实施例的清洁机器人2,其也可以将垃圾收集装置23关闭,而只让拖擦装置221工作;而且,通过将湿的拖擦件22111换成干的拖擦件22111,还可以使该实施例的清洁机器人2实现干拖功能,同样,由于该实施例的拖擦件22111可拆卸地连接于压盘22112上,因此,也可以方便地更换干拖擦件22111和湿拖擦件22111,实现干拖和湿拖模式的快速切换。
此外,如图1、3-5所示,在该实施例中,清洁机器人2还包括碰撞感应板25、激光雷达26、控制装置27、电池28以及用于人机交互的按钮、屏幕等人机交互装置。其中,碰撞感应板25用于防止清洁机器人2与障碍物发生碰撞,在该实施例中,碰撞感应板25设置于壳体20的前端;激光雷达26用于进行地图扫描,实现清洁机器人2的建图和定位,在该实施例中,激光雷达26嵌在上壳体201的后部;电池28用于为清洁机器人2提供电能;控制装置27则用于控制清洁机器人2的各种活动,例如,传感器信号收集、电机驱动控制、电池管理、导航定位、地图生成、智能避障及清洁路径规划等。
如图2-3所示,为了方便清洁机器人2进行越障,该实施例的清洁机器人2还包括顶起机构24。顶起机构24用于顶起清洁机器人2的前端和/或后端,这可以为清洁机器人2提供升力,不仅可以使清洁机器人2在地面行走过程中能够较为方便地越过一定高度的障碍物(例如门槛),提升清洁机器人2的越障能力,扩大清洁机器人2的清洁范围。
具体地,如图2、图3和图5所示,在该实施例中,顶起机构24设置在清洁机器人2的底盘202上,并位于底盘202的靠前的位置,其包括一个能够上下摆动的摆杆,当摆杆向下摆出后,摆杆能够从底盘202向下伸出并支撑于承载面(例如地面)上,从而能够顶起清洁机器人2的前端,当摆杆向上摆回后,摆杆收回,解除顶起,清洁机器人2的前端高度重新降低。基于此,在清洁机器人2越障过程中,顶起机构24可以顶起清洁机器人2的前端,主动提升清洁机器人2的前端高度,帮助清洁机器人2快速越障。
本领域技术人员应当理解,顶起机构24也并不局限于设置于底盘202的前部,其也可以设置在底盘202的后部,用于顶起清洁机器人2的后端。
图37-38示出了顶起机构24设置在底盘202后部的替代实施例。在该替代实施例中,优选地,可以在行走轮211处设置悬挂装置,该悬挂装置用于使行走轮211与底盘202保持弹性连接,这样行走轮211能够时刻保持与地面接触,从而当顶起机构24将清洁机器人2的后端顶起时,行走轮211在悬挂装置的作用下也仍然能够紧贴地面,为清洁机器人2提供摩擦力。
具体地,如图37和图38所示,悬挂装置包括弹簧212和支撑件213,弹簧212水平设置,支撑件213倾斜地连接于弹簧212和行走轮211之间,且支撑件213用于与弹簧212和行走轮211连接的两端之间的部分相对于清洁机器人2的壳体20可转动地设置。基于这种结构设置,该悬挂装置不仅可以使行走轮211保持与地面接触,还可以利用弹簧212的弹性力辅助顶起机构24使清洁机器人2的后端翘起,所以,在这种情况下,顶起机构24只需较小的顶起力就可以将清洁机器人2的后端顶起来,从而使得顶起机构24可以选用较小的电机,实现减少成本、节约安装空间的目的。
当然,悬挂装置也可以不与顶起机构24一起设置,由于悬挂装置能够使行走轮211始终与地面保持接触,因此,单独设置悬挂装置时,也可以增加清洁机器人2的越障能力。
图16-28示出了清洁机器人的第二实施例。
该第二实施例与第一实施例基本相同,其中,二者的差别主要在于:一方面,用于驱动两个拖擦件22111绕竖直轴线反向转动的拖擦驱动机构2212的具体结构不同;另一方面,拖擦件22111相对于底盘202进行摆动的具体实现方式不同;再一方面,垃圾收集装置23的具体结构略有不同。因此,以下着重对这四方面的不同进行说明,其他未作说明之处可以参照第一实施例进行理解。在介绍其他实施例时,也仅着重介绍其不同之处。
如图17-20所示,在该第二实施例中,拖擦驱动机构2212虽然仍采用蜗轮蜗杆机构向输出轴22123传递转矩,但蜗轮蜗杆机构中的蜗杆电机不再采用双头蜗杆电机22121,而是采用两个单头蜗杆电机22121’,每个单头蜗杆电机22121’与蜗轮蜗杆机构中的两个蜗轮22122一一对应啮合,从而可以利用两组蜗轮蜗杆旋向不一样来驱动两个拖擦件22111绕竖向布置的输出轴22123反向旋转,既可以保证清洁机器人2头部相对的动平衡,又可以改善拖擦效果,同时还能起到清扫作用,并将垃圾收集到中间,便于垃圾收集装置23收集。而且,该实施例采用两个电机,相对于采用一个电机的情况,其好处还在于,便于将两个电机分别布置在吸尘装置的两侧,可以有效避免因电机转轴横穿吸尘装置而阻挡吸尘装置的风路,能够提高吸尘装置风路的顺畅性,减小吸尘装置的进风阻力,增大吸尘装置的进风流量,改善吸尘装置的吸尘效果。
如图21a-图21c所示,为了实现拖擦单元2211与拖擦驱动机构2212的可摆动连接,进而实现拖擦单元2211与底盘202的可摆动连接,在该第二实施例中,不再在输出轴22123与拖擦单元2211之间设置柔性连接块2216等柔性连接结构,而是将拖擦单元2211与拖擦驱动机构2212之间的配合关系设置为间隙套接。具体地,如图21c所示,在该实施例中,输出轴22123与压盘22112之间间隙套接,由于输出轴22123与压盘22112之间的间隙使得压盘22112可以相对于输出轴22123具有一定的间隙摆动角度,而拖擦件22111又设置于压盘22112上,因此,这种拖擦单元2211与拖擦驱动机构2212之间间隙套接的配合方式,能够利用间隙活动来实现拖擦单元2211与底盘202的可摆动连接,使得拖擦件22111能够根据地面的实际情况来改变自身的摆动角度,达到适应地面的目的。
而且,如图21b所示,在该实施例中,为了方便拖擦单元2211的拆装,拖擦单元2211的压盘22112与拖擦驱动机构2212的输出轴22123之间设有能够将拖擦单元2211与拖擦连接结构吸附在一起的磁性吸附件2217。通过设置磁性吸附件2217,可以避免压盘22112与输出轴22123之间的刚性连接,实现二者的可拆卸连接,并且,利用磁力吸附实现连接,在需要对拖擦单元2211进行拆装时,只需一拔一扣即可,非常简单方便。当然,要实现拖擦单元2211与拖擦驱动机构2212之间的可拆卸连接,也可以采用螺纹连接件、卡扣件和钩挂件等其他方式中的一种或多种。
如图22和图23所示,在该第二实施例中,垃圾收集装置23虽然仍采用吸尘装置,且吸尘口236仍然设置在两个拖擦件22111的前方的中部,但相对于前述第一实施例,过滤结构有所改变,不再采用滤网233,而是替换为海帕纸233’,利用海帕纸233’对气流中的灰尘进行过滤,并相应地设置有用于支撑海帕纸233’的海帕纸支架2331’,并且,在灰尘盒231的盒体2313和盒盖2314之间设置有过滤支架238,海帕纸233’设置在该过滤支架238的外侧,并处于盒体2313与除尘风机234的流体连通的通路上;另外,在盒盖2314上增设有把手2315,把手2315通过定位销2316安装于盒盖2314上,便于用户取出灰尘盒231,及时清空灰尘盒231中的灰尘。
除了上述几处主要的不同之外,该第二实施例中的清洁机器人2还与第一实施例存在另外一些不同之处。如图17所示,在该第二实施例中,清洁机器人2的壳体20的结构稍有不同,上壳体201上设有电池安装槽,用于安装电池28,相应地,电池安装槽上盖设有上壳封盖2011,以遮蔽电池安装槽及其内部的电池28,保护电池28,并保持整体平整美观,底盘202下部也增设有下壳封盖2021,更便于拆装维修;而且,在碰撞感应板25上增设摄像头251和充电触片252,其中摄像头251用于与激光雷达26配合,实现更好的扫描定位和障碍物识别功能,充电触片252则用于与基站上的充电片接触,实现对电池28的充电。
图25示出了前述第一实施例和第二实施例的进一步改进实施例。
如图25所示,与前述第一实施例和第二实施例的主要不同在于,该实施例的清洁机器人2,其拖擦装置221还包括设置于拖擦单元2211后方的刮挡结构2219,该刮挡结构2219可以对由拖擦单元221上掉落的垃圾和/或污水进行刮挡,从而可以防止垃圾和/或污水残留于被拖擦单元2211所拖擦过的地面上,实现二次清洁。该刮挡结构2219可以为刮片或布条等,优选为柔性件,以减少对地面的刮损。当然,刮挡结构2219并不局限于第一实施例和第二实施例所示的清洁机器人2,对于本发明的其他清洁机器人2也适用。
图26-28示出了清洁机器人系统的第三实施例。
如图26-28所示,该第三实施例与前述两个实施例的差别主要在于,该实施例的清洁机器人2,其拖擦装置221只包括一个拖擦单元2211。
由图28可知,在该第三实施例中,拖擦单元2211仍然相对于底盘202绕竖直轴线转动,且为了实现拖擦单元2211绕竖直轴线的转动,如图27所示,该实施例的拖擦驱动机构2212,其仍采用蜗杆电机来输出转矩,但不同之处在于,该实施例的蜗杆电机只包括一个单头蜗杆电机22121’和一个蜗轮22122,利用该单头蜗杆电机22121’和该蜗轮22122的啮合来驱动拖擦单元2211绕竖直轴线转动,实现对地面更有效地清洁。
基于这种单拖擦单元2211的地面清洁装置22,为了实现充分地垃圾收集,如图28所示,在该实施例中,垃圾收集装置23的吸尘口236设置于拖擦单元2211的边缘外侧。由于垃圾会沿着拖擦件2211的边沿被聚集至旋转的拖擦单元2211的外侧,因此,这种设置方式,使得作为收集口的吸尘口236处于拖擦单元2211对垃圾的聚集路径上,从而便于将垃圾收集至灰尘盒231中。进一步地,该实施例还在壳体20的一侧侧壁上增设有垃圾阻挡件237,且吸尘口236设置在拖擦单元2211的边缘与该垃圾阻挡件237之间,这样可以利用该垃圾阻挡件237对垃圾的阻挡作用,将垃圾进一步聚集到一个较小的区域,实现更有效地收集。
还需要说明的是,在本发明中,垃圾收集装置23除了可以采用上述各实施例所示的吸尘装置之外,也可以采用其他结构形式,例如,可以不设置除尘风机234和风机导管235等,使得垃圾仅在自身惯性作用下以及地面清洁装置22的聚集作用下,从收集口进入垃圾收集装置23的内部,在这种情况下,垃圾收集装置23并不对垃圾施加进一步地作用,垃圾收集装置23仅相当于簸箕使用。
另外,在上述具有两个拖擦件22111的实施例中,两个拖擦件22111可以设置为边缘接触,这样,两个拖擦件22111以相同的方向旋转时,两个拖擦件22111在中间接触的位置相对运动,相互摩擦进行侧面(清扫件200)的清洁。
以上所述仅为本发明的示例性实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
Claims (15)
1.一种拖擦件(22111),用于清洁机器人(2)拖擦及清扫地面,其特征在于,所述拖擦件(22111)包括用于拖擦地面的拖擦件主体(100)及设置在所述拖擦件主体(100 )边沿且用于清扫地面垃圾的清扫件(200),所述拖擦件主体(100)与所述清扫件(200)一体设置;所述拖擦件主体(100)包括中部清洁部件(101)及设置在所述中部清洁部件(101)一侧表面的吸水部件(102),所述清扫件(200)沿拖擦件主体(100)的边沿连续设置。
2.根据权利要求1所述的拖擦件(22111),其特征在于,所述清扫件(200)由易甩干且不易变形的清洁材料制成。
3.根据权利要求2所述的拖擦件(22111),其特征在于,所述清扫件(200)的清洁材料包括毛刷、竹纤维、尼龙刷、涤纶、锦纶和涤纶与锦纶的复合材料中的至少一种。
4.根据权利要求1所述的拖擦件(22111),其特征在于,所述中部清洁部件(101)由第一清洁材料、第二清洁材料、第三清洁材料和第四清洁材料中的至少一种制成;
所述第一清洁材料为用于清洁顽固的地面污渍的清洁材料;
所述第二清洁材料为用于收集灰尘及毛发的清洁材料;
所述第三清洁材料为用于清洁地面凹处的污渍和垃圾的清洁材料;
所述第四清洁材料为用于清洁污垢及油渍的清洁材料。
5.根据权利要求4所述的拖擦件(22111),其特征在于,所述第一清洁材料包括木浆海绵、网眼抹布、钢丝网、尼龙纤维、聚酯纤维、金刚砂、百洁布及塑料网布中的至少一种;
所述第二清洁材料包括超细纤维、能水洗清洁的粘毛除尘TPR材料、除尘刷、粘毛布料、静电除尘布料、棉布、涤纶、锦纶及涤纶与锦纶的复合材料中的至少一种;
所述第三清洁材料包括尼龙毛刷、椰棕刷及细短毛的拖布中的至少一种;
所述第四清洁材料包括植物纤维与棉纱复合材料中的至少一种。
6.根据权利要求4或5所述的拖擦件(22111),其特征在于,所述中部清洁部件(101)包括第一清洁部(1011)及第二清洁部(1012),所述第一清洁部(1011)由所述第一清洁材料、第二清洁材料、第三清洁材料和第四清洁材料中的一种制成,所述第二清洁部(1012)由所述第一清洁材料、第二清洁材料、第三清洁材料和第四清洁材料中的不同于所述第一清洁部(1011)的另一种制成。
7.根据权利要求6所述的拖擦件(22111),其特征在于,所述第二清洁部(1012)在所述第一清洁部(1011)上设置有多个,多个所述第二清洁部(1012 )在所述第一清洁部(1011)呈点状阵列排布或者是沿圆周方向间隔排布;或者,所述第一清洁部(1011)与第二清洁部(1012)均设置有多个,且多个第一清洁部(1011)与第二清洁部(1012)交替排布。
8.根据权利要求1所述的拖擦件(22111),其特征在于,所述拖擦件主体(100)呈圆形,所述清扫件(200)沿所述拖擦件主体(100)的圆形边沿设置。
9.一种清洁机器人(2),其特征在于,包括用于驱动所述清洁机器人(2)在地面上行走的行走装置(21)、用于对地面进行清洁的地面清洁装置(22)以及垃圾收集装置(23),所述地面清洁装置(22)包括拖擦装置(221),所述拖擦装置(221)包括至少一个拖擦单元(2211)及拖擦驱动机构(2212),所述拖擦单元(2211)包括权利要求1-8任意一项所述的拖擦件(22111),在所述拖擦驱动机构(2212)的驱动作用下,所述至少一个拖擦单元(2211)的拖擦件(22111)能够相对于该清洁机器人(2)的底盘(202)绕竖直轴线转动,所述垃圾收集装置(23)包括用于连通所述垃圾收集装置(23)内部与外部的收集口,所述收集口设置在所述至少一个拖擦单元(2211)的垃圾聚集路径上,以便于所述垃圾收集装置(23)收集被所述绕竖直轴线转动的至少一个拖擦单元(2211)的拖擦件(22111)所聚集的垃圾,所述拖擦单元(2211)还能以水平轴线为中心进行摆动。
10.根据权利要求9所述的清洁机器人(2),其特征在于,拖擦单元(2211)能以竖直轴线为中心进行摆动,拖擦单元(2211)与拖擦驱动机构(2212)的输出轴(22123)之间设有柔性连接块(2216),利用柔性连接块(2216)的材料变形来实现拖擦单元(2211)以竖直轴线为中心的摆动;
及/或,拖擦装置(221)与底盘(202)之间通过水平转动轴(2218)连接,所述水平转动轴(2218)为每个拖擦单元(2211)提供一个水平旋转自由度,以使所述拖擦单元以水平轴线为中心进行摆动。
11.根据权利要求9所述的清洁机器人(2),其特征在于,拖擦单元(2211)与拖擦驱动机构(2212)之间的配合关系设置为间隙套接,以使所述拖擦单元能以竖直轴线为中心进行摆动,还能以水平轴线为中心进行摆动。
12.根据权利要求9所述的清洁机器人(2),其特征在于,清洁机器人(2)还包括顶起机构(24),所述顶起机构(24)设置在清洁机器人(2)的底盘(202)上,所述顶起机构包括一个能够上下摆动的摆杆,当摆杆向下摆出后,摆杆能够从底盘(202)向下伸出并支撑于承载面上。
13.根据权利要求9所述的清洁机器人(2),其特征在于,所述拖擦装置(221)包括两个拖擦单元(2211),在所述拖擦驱动机构(2212)的驱动作用下,所述两个拖擦单元(2211)的拖擦件(22111)能够相对于该清洁机器人(2)的底盘(202)绕竖直轴线同向或反向转动,所述收集口设置在所述两个拖擦单元(2211)的中部,以便于所述垃圾收集装置(23)收集被所述绕竖直轴线同向或反向转动的两个拖擦单元(2211)的拖擦件(22111)所聚集的垃圾。
14.根据权利要求9所述的清洁机器人(2),其特征在于,所述拖擦装置(221)包括一个拖擦单元(2211),在所述拖擦驱动机构(2212)的驱动作用下,所述一个拖擦单元(2211)上的拖擦件(22111)能够相对于该清洁机器人的底盘(202)绕竖直轴线转动,所述收集口设置在所述一个拖擦单元(2211)的边缘外侧,以便于所述垃圾收集装置(23)收集被所述绕竖直轴线转动的一个拖擦单元(2211)的拖擦件(22111)所聚集的垃圾。
15.根据权利要求9-14任意一项所述的清洁机器人(2),其特征在于,所述拖擦单元(2211)和/或行走装置(21)可摆动地连接于所述清洁机器人(2)的底盘(202)上,以使所述拖擦单元(2211)的拖擦件(22111)能够通过随着地面的凹凸不平进行摆动来保持与地面接触。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201611175802.1A CN107049159B (zh) | 2016-12-16 | 2016-12-16 | 拖擦件和清洁机器人系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201611175802.1A CN107049159B (zh) | 2016-12-16 | 2016-12-16 | 拖擦件和清洁机器人系统 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107049159A CN107049159A (zh) | 2017-08-18 |
| CN107049159B true CN107049159B (zh) | 2023-03-14 |
Family
ID=59619645
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201611175802.1A Active CN107049159B (zh) | 2016-12-16 | 2016-12-16 | 拖擦件和清洁机器人系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN107049159B (zh) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108814461A (zh) * | 2018-09-14 | 2018-11-16 | 云鲸智能科技(东莞)有限公司 | 转盘结构和机器人 |
| CN109758049A (zh) * | 2019-03-14 | 2019-05-17 | 广西信铠智泉科技有限公司 | 一种方便清理墙角的扫地机器人 |
| CN111345733B (zh) * | 2020-02-17 | 2020-09-01 | 苏州高之仙自动化科技有限公司 | 一种石材护理的清洁机器人 |
| WO2021197205A1 (zh) * | 2020-04-01 | 2021-10-07 | 追觅创新科技(苏州)有限公司 | 一种可浮动的清洁抹布盘机构及扫地机 |
| CN115067836A (zh) * | 2020-08-20 | 2022-09-20 | 科沃斯机器人股份有限公司 | 清洁装置及清洁机器人系统 |
| CN114831559A (zh) * | 2022-05-12 | 2022-08-02 | 佛山市银星智能制造有限公司 | 清洁机器人 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10151100A (ja) * | 1996-11-22 | 1998-06-09 | Azuma Kogyo Kk | スリッパ式清掃具 |
| KR20050098157A (ko) * | 2004-04-06 | 2005-10-11 | 주식회사 대우일렉트로닉스 | 진공청소기의 물 청소 장치 |
| CN202223175U (zh) * | 2011-08-08 | 2012-05-23 | 青岛爱星清洁用品有限公司 | 一种胎痕状地拖布 |
| CN102934968B (zh) * | 2012-01-20 | 2015-05-27 | 广东新宝电器股份有限公司 | 一种电动蒸汽拖把 |
| CN203736139U (zh) * | 2013-12-24 | 2014-07-30 | 赵利强 | 一种拖把底盘及具有该底盘的拖把 |
| CN204394429U (zh) * | 2014-12-23 | 2015-06-17 | 科德宝家居用品(苏州)有限公司 | 一种新型拖把头 |
| TWI583338B (zh) * | 2015-05-11 | 2017-05-21 | Ya-Jing Yang | Dispenser for cleaning machines |
| CN206586904U (zh) * | 2016-12-16 | 2017-10-27 | 云鲸智能科技(东莞)有限公司 | 拖擦件和清洁机器人系统 |
-
2016
- 2016-12-16 CN CN201611175802.1A patent/CN107049159B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN107049159A (zh) | 2017-08-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107049159B (zh) | 拖擦件和清洁机器人系统 | |
| CN106510556B (zh) | 清洁机器人和清洁机器人系统 | |
| CN109316135B (zh) | 用于清洁机器人系统的基站 | |
| CN109620064B (zh) | 用于清洁机器人系统的基站 | |
| US20240023778A1 (en) | Base station and cleaning robot system | |
| WO2018107479A1 (zh) | 清洁机器人和清洁机器人系统 | |
| CN109157165B (zh) | 一种家用智能拖地车 | |
| CN112674658A (zh) | 基站和清洁机器人系统 | |
| AU703016B2 (en) | Electric broom | |
| CN207640328U (zh) | 一种智能清洁机器人 | |
| CN110512554A (zh) | 一种实用性强的可收集垃圾式的路面清扫机 | |
| KR20140145714A (ko) | 걸레 회전형 청소장치 | |
| CN107049158B (zh) | 滚布及其智能清洁机器人 | |
| CN202184689U (zh) | 多功能清洁器 | |
| CN210931227U (zh) | 一种具有吸尘功能的拖把 | |
| CN206586904U (zh) | 拖擦件和清洁机器人系统 | |
| CN208988721U (zh) | 清洁机器人 | |
| CN102715874A (zh) | 地面清洁器 | |
| KR200489362Y1 (ko) | 양면 걸레를 구비한 회전식 걸레 청소기 | |
| CN215305546U (zh) | 清洁机器人 | |
| CN215128076U (zh) | 一种解决次生污染的扫、拖地一体机器人 | |
| CN217974200U (zh) | 一种自动喷水降尘的扫路机 | |
| CN215191270U (zh) | 一种用于清洁机器人的优化型清洁组件 | |
| CN215016813U (zh) | 悬浮式清洁机器人 | |
| CN215227319U (zh) | 一种拖把 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |