CN1069404C - 一种激光测量仪 - Google Patents
一种激光测量仪 Download PDFInfo
- Publication number
- CN1069404C CN1069404C CN 96105910 CN96105910A CN1069404C CN 1069404 C CN1069404 C CN 1069404C CN 96105910 CN96105910 CN 96105910 CN 96105910 A CN96105910 A CN 96105910A CN 1069404 C CN1069404 C CN 1069404C
- Authority
- CN
- China
- Prior art keywords
- target reflector
- laser
- laser beam
- agent set
- measuring apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images

































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
- G01C15/002—Active optical surveying means
- G01C15/004—Reference lines, planes or sectors
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Photometry And Measurement Of Optical Pulse Characteristics (AREA)
Abstract
一种激光测量仪,包含至少一个用于发射激光束的主体装置和一用于将来自主体装置的激光束反射朝向主体装置的目标反射器,而所述主体装置包含:发射激光束发射器、旋转和扫描激光束的旋转装置、一倾斜机构,用于将激光束倾斜;一旋转角度检测器,与旋转装置连锁,用于检测激光束的照射方向;一反射光检测器,以及一准直显示装置,用于根据来自反射光检测器的信号检测相对于目标反射器的方向偏差及用于得到方向偏差上的信息。
Description
本发明涉及一种激光测量仪,利用该测量仪能够借助激光来提供一测量基准面,特别是除了水平基准面以外,提供一种对于水平基准面成指定倾斜角的任选倾斜的设定平面。
激光测量仪用于在很宽的范围内取代光学水平仪以提供一水平基准面。
利用这种激光测量仪,通过沿水平方向投射激光束形成水平基准线或者通过沿水平方向经过一旋转棱镜形成水平基准面。
在建筑工程作业和民用工程作业中,通过利用水平基准面来进行定位和水平平面设定。例如,通过利用光检测器来检测激光束,从而测定一基准位置,这种方式用于测定在室内装饰作业中的窗的安装位置或吊顶用的水平线。
此外,如在本申请人的6-26861号日本专利公开文本中提出的,这种激光测量仪现在不仅用于设定水平平面,此外还用于设定倾斜平面,其广泛用于施工作业,例如设定道路的排水倾斜度或设定道路表面斜度。
下面参阅图28到35,对在公开号为6-26861的日本专利公开文本中提出的激光测量仪进行介绍。
在外壳5的中心形成一个截头圆锥形的凹槽6,支承座7设在凹槽6的中心。支承座7包含3个凸起部分9,它们在圆形通孔8的内周边上在3个均匀间隔的位置上按三次弯曲表面平滑地凸起。
用于发射激光束的激光投射器10位于通孔8中,激光投射器10的头11嵌入并由支承座7支承。头11的下部设计呈球形,这一球形部分11a以滑动方式接触上述三个凸起9。按这样的方式支承激光投射器10,在于使它能够相对于竖直线成任何方向倾斜。
电动机座14设在头11上,一扫描电动机15装在电动机座14上。齿轮16与扫描电动机15的输出轴相连接。齿轮16与扫描齿轮17相啮合,这将在后文介绍。
激光投射器10的轴线与激光投射器10的头11对准,一镜座13以可旋转以过轴承12进行安装。扫描齿轮17连接在镜座13上。如上所述,由于扫描齿轮17与齿轮16相啮合,使得镜座13可以利用扫描电动机15围绕竖直轴旋转。五边形棱镜18装在镜座13上,由激光投射器10发射的激光束经过投光窗19沿水平方向照射。
在激光投射器10的中部,配置一传感器支承架63,在支承架上设有固定的汽泡管20和21,用作检测水平度的倾斜检测器,使它们的朝向彼此垂直。该固定的汽泡管20和21是电容检测型的电式汽泡管,每个汽泡管发出的电信号对应于水平面的倾斜角。
在激光投射器10的下端,固定一个近似以成直三角形的底板64,立柱70立在底板64的直角部分的角顶的附近处,球67装在立柱70的上端。一个L形倾斜调节板62设在底板64的上方,一圆锥形凹槽99形成在倾斜调节板62的背后表面上的顶点处。球67嵌入凹槽99,倾斜调节板62的角顶部分支承在主柱70上,使倾斜调节板62在球67上可旋转。此外,弹簧68设在倾斜调节板62和底板64之间,圆锥形凹槽99压靠在球67上。倾斜调节板62被顺时针推动,如图28所示。
用作倾斜运动检测器的任选角度设定汽泡管65和66设在倾斜调节板62的沿L形的部分上。使任选角度设定汽泡管处在彼此垂直的两个方向上。
支承板72位于在传感器支承架,63的下方并由激光投射器10伸出。倾斜调节螺钉52和53以可旋转方式安装在底板64上的这样的位置处,以便与在底板的顶点处的立柱70形成一个三角形,倾斜调节螺钉52和53的上端以可旋转的方式支承在支承板72上。
倾斜调节螺钉52的下端由底板64向下伸出,倾斜调节齿轮54与倾斜调节螺钉52的伸出端相连接。那么倾斜调节齿轮54与倾斜调节齿轮56相啮合,如下所述。倾斜调节螺钉53的下端由底板64向下伸出,倾斜调节齿轮55与倾斜调节螺钉53的伸出端相连接。倾斜调节齿轮55与下文要介绍的倾斜调节齿轮57相啮合。
一个倾斜调节螺母48拧在倾斜调节螺钉52上,具有圆形断面的螺母上的柱50伸到倾斜调节螺母48上。一个具有圆形截面的倾斜调节柱60在倾斜调节板62的端面上伸出,其位置接近该任选角度设定汽泡管65,平行于任选角度设定汽泡管63的中心线,使倾斜调节柱60与螺母上的柱50相接触。此外,接有两个平行的导柱71,它们搭接在底板64和支承板72之间,倾斜调节柱60以滑动方式保持在两个导柱71之间,以便限制倾斜调节板62沿水平方向的旋转,以及使倾斜调节柱60沿竖直方向和绕倾斜调节柱60的轴旋转。
倾斜调节螺母49拧在倾斜调节螺钉53上,具有圆形截面的螺母上的柱51在倾斜调节螺母49一位置上伸出。具有圆形截面的倾斜调节柱61在倾斜调节板62的端面上的伸出位置接近任选角度设定汽泡管66,平行于任选角度设定汽泡管66的中心线,使倾斜调节柱61与螺母上的柱51相接触。
在底板64的下表面上,悬下安装一个柱73,以及经过这个柱73固定一个还用作电动机座的倾斜检测件23。在倾斜检测件23的上表面上装有倾斜调节电动机58和59,上述倾斜调节齿轮56连接在倾斜调节电动机58的输出轴上,倾斜调节齿轮57连接在倾斜调节电动机59的输出轴上,使倾斜调节齿轮56、57分别和倾斜调节齿轮54和55相啮合。
在倾斜检测件23的下表面上装一环形反射镜。在与倾斜检测件23各对面的位置上,安装指定数量(在本实施例中为4)的光传感器24a、24b、24c和24d,每一个光传感器都包含一组发光元件和光探测元件,这些元件当将外壳5和激光投射器10彼此重直定位时处在环绕激光投射器的轴的同一圆形周沿上。
由激光投射器10的头11水平沿伸有二彼此垂直的倾斜调节臂25和26。倾斜调节臂25和26通过凹槽6的圆锥形表面并定位在外壳5内部,在倾斜调节臂25和26的前端伸出触接柱27和28。触接柱27和28设计成圆形的,二圆柱的轴线彼此垂直且包含在一平面内,它们通过球形部分11a的中心。限制触接柱27和28其中一个,例如触接柱27的沿水平方向的运动,使它仅能够沿竖直方向运动。虽然在图上没有表示,触接柱27以可滑动方式嵌入在沿竖直方向延伸的导槽中,或者触接柱27利用一弹性装置例如弹簧以可滑动方式压靠在沿竖直方向延伸的侧壁表面上。
架板29和30装在外壳5的内壁上。水平调节电动机31装在架板29上,水平调节电动机23装在架板30上。驱动齿轮33连接在水平调节电动机31的转轴上,驱动齿轮34连接在水平调节电动机32上。一螺杆轴35以可旋转方式安装,其在与触接柱27相垂直的方向上运转并在外壳5的顶面和架板29间的范围内跨接。一个驱动齿轮36连接在螺柱轴35上驱动齿轮36还与驱动齿轮33相啮合。一滑动螺母37与螺杆轴35相连接,柱38在滑动螺母37上伸出,柱38以可滑动方式与触接柱27相接触。
与之相似,螺杆轴39运转垂直于触接柱28并以可旋转方式安装跨接在外壳5的顶面和架板30间。驱动齿轮40与螺柱轴39相啮合,驱动齿轮40还与驱动齿轮34相啮合。一滑动螺母41与螺杆轴39相连接,柱42在滑动螺母41上伸出,柱42以可滑动方式与触接柱28相接触。
一弹簧固定件43设在外壳5的顶面和螺杆轴35或螺杆轴39之间,弹簧44置于弹簧固定件43和激光投射器10之间,使激光投射器10顺时针被推动围绕图28中的支承座7。
在图中,参考数码45表示电池箱,其容纳用于驱动激光测量仪的电池。激光测量仪的主体4经过一用于调整水平的水平调整螺钉46安装在一三角架(未表示)。参考标号47表示一环绕镜座13玻璃窗。
图33是上述常规类型仪器的控制单元的方块图。
固定的汽泡管20和任选角度设定汽泡管65的检测结果经过转换电路85输入到角度检测电路87,固定的汽泡管21和任选角度设定汽泡管66的检测结果经过转换电路86输入到角度检测电路88。基准角度92和91分别设定在角度检测电路88和87上。基准角度91和92通常分别为0°。
当来自固定的汽泡管20的信号经过转换电路85输入到角度检测电路87时,角度检测电路87由基准角91检测一偏差,以及将角度检测电路87的信号输入到电动机控制器89。然后由电动机控制器89驱动和控制水平调节电动机31。
当来自固定的汽泡管20和任选角度设定汽泡管65的信号利用转换电路85输入到角度检测电路87时,角度检测电路87输出一对应该偏差的信号。这一信号输入到倾斜驱动电路83,利用该倾斜驱动电路83驱动倾斜调节电动机58并进行控制。当来自任选角度设定汽泡管65的信号经转换电路85输入到角度检测电路87时,角度检测电路87由基准角度91检测出偏差,并且角度检测电路87的信号输入到电动机控制器89。然后利用电动机控制器89驱动和控制水平调节电动机31。
角度检测电路88的信号输入到电动机控制器90,利用电动机控制器90驱动和控制该水平调节电动机32。来自角度检测电路88的信号和来自任选角度设定器82的信号输入到倾斜驱动电路84,利用倾斜驱动电路84驱动和控制倾斜调节电动机59。
角度检测电路87和88的角度偏差输入到鉴别器93。鉴别器93由角度检测电路87和88的二角偏差中选择出一个较大的角度偏差,并向显示装置驱动器94输出一个与所选择的角度偏差变化相对应的输出量,在显示装置95上显示一个与该偏差相对应的数值。
由激光束形成的基准面可以设定在水平方向或设定在任一角度上。在下文中,将介绍为了形成水平基准面,激光测量仪所进行的水平调节操作。
当将主体4已经安装但还未进行调节时,通常激光投射器10的轴线并不与竖直线对准,以及固定的汽泡管20和21并不处在水平位置。在这样情况下转换电路85和86工作,使来自固定的汽泡管20和21的信号输入到角度检测电路87和88。
假如基准角度91和92分别设为0°,由角度偏差电路87和88输出角度偏差信号。当角度偏差信号输出时,电动机控制器89和90沿指定方向驱动水平调节电动机31、32,以便使角度偏差信号变为0。
下面以水平调节电动机31和32为实例,介绍与水平调节电动机31有关的操作。
当水平调节电动机31被驱动时,水平调节电动机31的旋转经过驱动齿轮33和驱动齿轮36传递到螺杆轴35,由于螺杆轴35的旋转,使滑动螺母37上或下移动。滑动螺母37的上或下移动经过柱38和触接柱27传递到倾斜调节臂25,因此激光投射器被倾斜。
如上所述,触接柱27的移动沿水平方向受到限制,只能沿竖直方向移动。因此,激光投射器10的倾斜方向受到限制,它的倾斜围绕着该行进通过球形部分11a中心的触接柱28的轴线。接着,当水平调节电动机32被驱动时,蜗杆轴39旋转,由于柱42使触接柱28上或下运动。
由于触接柱27的水平运动受一个槽(未表示)限制,它的竖直运动受柱38和弹簧44的限制,触接柱27只被允许围绕该行进通过球形部分11a的中心的触接柱27的轴线进行旋转。
当杆42被上或下运动时,对触接柱28的竖直运动的变化量,由于在柱42和触接柱28之间沿轴向的滑动运动是给定的,激光投射仪10围绕触接柱27的轴线被倾斜。如上所述,触接柱27的截面是圆形的。因此,当触接柱27旋转时,触接柱27的轴线的倾斜是不变的。即由水平调节电动机31和32产生的倾斜不会对其它倾斜轴线即触接柱27和28的轴线的倾斜产生影响。因此,可以与另一个轴线的倾斜调节无关进行一个轴线的倾斜调节,倾斜调节的操作和与倾斜调节操作相关的控制程序可以广为简化。
由于激光投射仪10受弹簧44顺时针方向推动,如图28所示,激光投射仪10精确地跟踪滑动螺母37的运动。
在激光投射仪10的倾斜操作中,由于激光投射仪10的球形部分11a利用凸起9支承在三点上,激光投射仪10的支承是稳定的。由于在球形部分11a和具有平滑弯曲表面的凸起9之间的接触作用,激光投射仪10沿任意的倾斜方向平滑地运动,激光投射器10的姿势可以易于调节和控制。
当激光投射仪10被倾斜时,进行水平调节操作,使来自固定的汽泡管20和21的检测值接近水平。最后由电动机控制器89和90输出的角度偏差变为0,从而完成水平调节操作。
固定的汽泡管20和21的检测范围是窄的,当超出预定范围时,产生饱和状态。因此,倾斜方向可以被检测,但倾斜角的值不能被检测。因此,设有光传感器24a、24b、24c和24d,以便使包含水平调节电动机31和32、驱动齿轮33和34、驱动齿轮36和40、螺杆轴35和39、滑动螺母37和41以及倾斜调节臂25和26的调节机构不会运动到机械调节范围之外。即当达到机械调节范围的限值时,由光学传感器24a、24b、24c和24d的其中之一发出的光被装在倾斜检测件23上的反射镜反射并由光传感器检测。因此,检测了出现到达机械调节范围限值的位置,停止了水平调节电动机31和32,或者在显示装置上显示或发出蜂呜报警。
在这一实例中,利用水平调节螺钉46进行粗调,使之落入调节范围,可进行水平调节操作。
当完成水平调节操作时,由激光投射仪10发出激光束。此外,驱动扫描电动机15以便围绕竖直轴线旋转激光投射仪10,经过五边形棱镜18使激光束沿水平方向照射。通过进一步旋转,由激光束形成一水平基准面。
在水平调节操作的过程中,从开始到完成水平调节需要一些时间。在这一期间,显示水平调节操作的过程,以便使操作者了解水平调节操作正在恰当地进行并消除操作者二意不定的感觉。
利用鉴别器93判别由角度检测电路81和88发出的角度偏差的幅值,并选择出较高的角度偏差。所选择的角度偏差的变化输出到显示装置驱动器94,显示的内容根据角度偏差的变化而经。在显示装置95上显示该角度。
较高角度偏差被选择出,是由于用于较高角度偏差的角度调节所需的时间较长。替代角度偏差幅值的选择,可以得到由角度检测电路87和88输出的各角度偏差的和,并根据各角度偏差的和可以改变显示的内容。
图34是表示角度偏差和时间之间相互关的曲线图。根据这一关系图,改变显示内容的位置是预先设定的。当角度偏差达到预定位置时,显示被转换,将水平调节操作的过程通知操作者。
接着,介绍在如上所述形成水平基准面之后将由激光束形成的基准面设定在任选角度的情况。
由任选角度设定器81和82产生的使基准面倾斜的数值分别输入到倾斜驱动电路83和84。
确定固定的汽泡管20和任选角度设定汽泡管65的检测结果与固定的汽泡管21和任选角度设定汽泡管66的检测结果是否相同,并使它们彼此相同。在这样情况下,最好使固定的汽泡管20和21处在水平位置上,反之它们也可以不处于水平位置下,假如它们在未饱和状态下,也是满足需要的。
当来自固定的汽泡管20和21以及任选角度设定汽泡管65和66的输出量彼此相同时,使任选角度设定汽泡管65和66按照由任选角度设定器81和82设定的角度倾斜,激光投射仪10被倾斜,使任选角度设定管65和66转到水平位置。那么就可以得到用于形成任选角度基准面的激光投射仪的旋转轴线。因此,当旋转激光投射仪10形成一基准面时,激光束基准面就是按照预期的形成的。
此外,下面将提供更具体的介绍。由于对任选角度设定汽泡管65的角度设定操作与对任选角度设定汽泡管66的角度设定操作相似,下面将仅对任选角度设定汽泡管65进行介绍。
由一输入装置或一控制装置(未表示)向转换电路85输入转换信号,将来自固定的汽泡管20的信号和来自任选角度设定汽泡管65的信号输入到角度检测电路87。假若在角度检测电路87中得到了由固定的汽泡管20和任选角度设定汽泡管65检测的角度的偏差,以及假如存在该偏差,这一偏差信号输入到倾斜驱动电路83。
倾斜驱动电路83驱动倾斜调节电动机58。当倾斜调节电动机58被区动时,倾斜调节齿轮56旋转,倾斜调节齿轮56的旋转经过倾斜调节齿轮54被传递到倾斜调节螺杆52,倾斜调节螺母48沿指定的方向上或下移动。当倾斜调节螺母48的螺母上的柱与倾斜调节柱60衔接时,使倾斜调节板62沿使偏差变为0的方向倾斜。
倾斜调节板62的倾斜由任选角度设定汽泡管65检测,并经转换电路85将检测信号进一步输入到角度检测电路87。
利用角度检测电路87顺序地计算固定的汽泡管20和任选角度设定汽泡管65的检测角度的偏差,并将检测的角度偏差反馈到倾斜驱动电路83,驱动倾斜调节电动机58,直到使检测的角度偏差变为0。
当检测的角度偏差为0时,激光投射仪10的轴线移动到垂直于由任选角度设定汽泡管65和66检测的平面的方向上。
接着,将即时出现的角度由任选角度设定器81输入到倾斜驱动电路83,开始倾斜基准面设定的操作。
在倾斜驱动电路83中,驱动倾斜调节电动机58,使之达到由任选角度设定器81输入的即时信号相对应的角度,使倾斜调节板62沿与要达到的倾斜基准面相反的方向倾斜。
这里,例如将一个脉冲电动机用作倾斜调节电动机58,将用于倾斜调节所需的倾斜调节板62的倾斜调节角和脉冲电动机的脉冲数预先存储在倾斜驱动电路83中。然后将由任选角度设定器81设定的角度对应的脉冲数输出以驱动倾斜调节电动机58。
利用倾斜调节电动机58旋转倾斜调节螺柱52,倾斜调节螺母48沿一指定方向例如向下移动。
倾斜调节螺母48的移动经过螺母上的柱50和倾斜调节柱60传递到倾斜调节板62,如上所述,倾斜调节板62如图28所示围绕球67逆时针倾斜。
如上所述,倾斜调节柱60由导柱71导向,仅沿竖直方向倾斜。于是,倾斜调节柱60的倾斜不会影响任选角度设定汽泡管66的倾斜。
当倾斜调节板62倾斜时,角度检测电路87的输出值变化,由倾斜驱动电路83计算的比较结果值下降。
当比较值变为0时,倾斜调节电动机58的驱动停止,倾斜调节板62的倾斜设定操作完成。这一完成信号还输入到转换电路85,该电路以这样一种方式转换,即仅使来自任选角度设定汽泡管65的信号输入到基准角91。
还以相似的方式进行对任选角度设定汽泡管66的倾斜调节操作。如上所述,由于倾斜调节柱60由导柱71导向,任选角度设定汽泡管66的倾斜调节操作不会对任选角度设定汽泡管65产生影响。因此,倾斜调节板62沿两个方向的倾斜调节操作可以独立地完成,对倾斜调节板62的2个方向的倾斜操作的控制程序是简单的。
当倾斜调节板62的倾斜设定操作完成时,为了设定该倾斜基准面,根据任选角度设定汽泡管65的检测结果,开始激光没射仪10的倾斜操作。激光投射仪10的倾斜设定操作以这样一种方式进行,即使任选角度设定汽泡管65的检测结果为沿水平方向的。由于这一操作与根据固定的汽泡管20和21进行水平调节操作的情况相似,这里不再进行详细的介绍。
图32表示已经完成倾斜基准面设定操作的状态。当倾斜 基准面的设定操作完成时,倾斜调节板62处于水平位置。
固定的汽泡管20和任选角度设定汽泡管65共同发挥作用保证了倾斜调节板62的倾斜调节操作的精度。每次进行倾斜调节操作或已经重复预定次数的操作之后都可以实现这一点。
图35表示一与任选角度设定器81和82配合工作的控制器96的实例。倾斜调节板62的倾斜调节由两个轴(X和Y)的倾斜调节来保证,即时的数字值显示在显示装置97和98上。
在上面的介绍中,已经完成由激光束形成的基准面的方向倾斜的调节。实际上,精确设定必须首先沿一预期的方向(水平方向)完成,在该方向上激光投射仪的主体装置4本可能是倾斜的。
在过去,为了进行将主体设定在一倾斜的方向上的设定操作,如图28所示已经使用了在主体装置4的上表面上装的准直仪。在主体装置中的倾斜设定机构的倾斜方向设定平行于该设定和检测倾斜的汽泡管的纵向,按这样一种方式进行机械配置即使准直仪75的准直方向也平行于倾斜设定机构。主体装置的方向也与倾斜设定机构对准。设定准直仪75对某一倾斜方向的操作是旋转或移动该主体装置以及转动在主体装置中的倾斜设定机构的倾斜方向和使汽泡管朝向预定的方向。在这当中,由于主体装置通常安装三角架上,下面将对三角架的操作进行介绍。
将一目标(未表示)预先安装在打算要设定的倾斜方向上,并且利用准直仪75使激光投射仪的主体装置朝向精确面向目标的方向,可以将主体装置4设定在要倾斜的方向上。
松开固定主体4的各螺钉(未表示),旋转主体装置4。由准直仪75对目标瞄准,主体装置4的方向精确地朝着目标设定。
由上述介绍明显看出,在对激光测量仪的一系列设定操作中,将水平线用作设定内部倾斜角(仰角)时的基准,根据由一种倾斜检测器例如汽泡管电检测的倾斜信息进行这一操作。因此测量仪将无人为误差。故可以高精度地设定倾斜角。
另一方面,在设定主体装置4到某一倾斜方向的操作中,使用了准直仪75,优于对测量仪确定对准还是没有对准的人为判断。此外,准直仪75不需要由高技术的熟练人员来进行准直,这不同于对望远镜的准直精度不高的瞄准。由于这个原因,由于准直仪75本身精度低和人为误差,利用准直仪75来设定方向时不会实现高精度。
在常规的土木工程作业中,不需要高精度,在利用准直仪75进行方向设定中不存在特殊问题,而近些年来,在高度机械化的土木工程作业中,精度的问题突出了。
本发明的一个目的是提供一种激光测量仪,利用该测量仪能够高精度设定要由激光测量仪设定的倾仰角,以及还能够通过消除人为误差自动地更精确地设定倾斜角。
为了实现上述目的,根据本发明的一种激光测量仪,包括:至少一个用于发射激光束的主体装置和一个用于将来自所述主体装置的激光束反射朝向所述主体装置的目标反射器,其中,所述主体装置包括:一个用于发射激光束的发射器,一个用于旋转和扫描所述激光束至一个基准面的旋转装置,一个可使所述激光束至少在一个方向内以一个任选的角度倾斜的倾斜调节机构,一个与所述旋转装置连锁并用于检测所述激光束的照射方向的旋转角度检测器,一个用于检测来自所述目标反射器的反射光的反射光检测器,一个位置鉴别器,用于检测从所述主体装置至所述目标反射器的方向和在其内所述倾斜调节机构可通过所述反射光检测器与所述旋转角度检测器而进行倾斜的方向之间的偏差,以及一个用于根据所述位置鉴别器的检测来显示关于所述偏差的信息的显示装置。
根据本发明的一种激光测量仪,包括:至少一个用于发射激光束的主体装置,一个用于旋转所述主体装置的主体装置旋转器和一个用于将来自所述主体装置的激光束反射朝向所述主体装置的目标反射器,其中,所述主体装置包括:一个用于发射激光束的发射器,一个用于使所述激光束照射至一个基准面的旋转装置,一个可使所述旋转装置至少在一个方向内以一个任选的角度倾斜的倾斜调节机构,一个与所述旋转装置连锁并用于检测所述激光束的照射方向的旋转角度检测器,一个用于检测来自所述目标反射器的反射光的反射光检测器,一个位置鉴别器,用于检测从所述主体装置至所述目标反射器的方向和在其内所述倾斜调节机构可通过所述反射光检测器与所述旋转角度检测器而进行倾斜的方向之间的偏差,以及一个旋转控制器,用于根据所述位置鉴别器的检测来控制所述主体装置旋转器的旋转,使得消除从所述主体装置至所述目标反射器的所述方向和在其内所述倾斜调节机构可进行倾斜的所述方向之间的所述偏差。
因此,所述反射光检测器检测反射的光检测信号的重心(Center ofgravity)位置并且识别所述目标反射器的中心;或者,所述发射器调制所述激光束并且所述反射光检测器装有一个用于检测被调制的所述激光束的滤波器;或者,从所述主体装置发射的所述激光束是圆偏振光,所述目标反射器包括一个偏振光维持反射面,用于在维持所述入射激光束的圆偏振光的同时反射该光,和一个偏振光变换反射面,用于反射与所述入射激光束的圆偏振光不同的的圆偏振光中的光,并且所述反射光检测器将从所述主体装置发射的圆偏振光的激光束与所发射的圆偏振光不同的圆偏振光的激光束分离开并检测所述目标反射器的两个反射面之间的边界;或者,所述目标反射器具有分为上下部分的反射层,并且在沿竖直方向对于所述目标反射器照射和扫描所述激光束的情况下,通过测定从所述目标反射器所得到的反射激光束的重心位置来检测沿竖直方向的所述目标中心;或者,设有一个手动设定机构,用于手动操作所述倾斜机构的倾斜设定。
图1是本发明的一实施例的机械部分的横断面图;
图2是上述实施例的光学系统和控制系统的方块图;
图3A和3B表示目标反射器的一个实施例;
图4A和4B表示另一种目标反射器的实例;
图5A、5B、5C、5D、5E和5F表示上一实例的工况;
图6是本发明的第二实施例的光学系统和控制系统的方块图;
图7是第二实施例中的反射光检测电路的一实例的电路图;
图8是用在第二实施例中的目标反射器的透视图;
图9是用于解释反射光检测电路工况的示意图;
图10A和10B表示来自目标反射器、激光束和反射光检测电路的各输出量的相互关系;
图11是本发明的第三实施例中的发射器的方块图;
图12是用在本发明中的角度显示盘的正面图;
图13是装有能够手动调节主体装置方向的手动调节机构的激光测量仪的横断面图;
图14是上述手动调节机构的基本部分的平面图;
图15是装有可手动调节所照射的激光束的倾斜角的机构的激光测量器的方块图;
图16A、16B和16C用于解释利用目标反射器测定所照射的激光束的倾斜的工况;
图17A、17B和17C用于解释利用目标反射器测定所照射的激光束的倾斜的工况;
图18是表示利用目标反射器测定所照射的激光束的倾斜的工况的流程图;
图19是表示利用目标反射器测定所照射的激光束的倾斜的工况的流程图;
图20A和20B表示目标反射器的一个实例;
图21A和21B表示另一种目标反射器的一个实例;
图22A和22B表示再一种目标反射器的一个实例;
图23表示再一种目标反射器的一个实例;
图24表示目标反射器的一改进实例;
图25A和25B表示目标反射器、激光束和反射光检测电路各输出量的相互关系;
图26是本发明第五实施例的光学系统和控制系统的方块图;
图27A和27B表示用在第五实施例中的目标反射器;
图28是常规实例装置的横断面图;
图29是沿图28中的A-A线箭头方向所取的视图;
图30是沿图28中的B-B线箭头方向所取的视图;
图31是沿图28中的C-C线箭头方向所取的视图;
图32是用于解释常规实例工况的附图;
图33是常规实例的控制系统的方块图;
图34是表示水平调节状态的示意图;以及
图35用于解释控制器的一个实例。
在下文中参照附图对本发明的一个实施例进行介绍。
在本发明中,一个目标(目标反射器168)置于在欲倾斜的方向上,主体装置4识别该倾斜,对主体装置4的倾斜方向或倾斜设定机构的基本倾斜方向根据目标反射器进行校正。在图1和图2中,与图28到35中相同的组成部分使用相同的符号表示,这里对它们不再详细介绍。
首先,参照附图1介绍机械部分。主体装置旋转器151安装在电池箱45的下方。现在对主体装置旋转器151进行介绍。
一旋转底座152固定在电池箱45的下表面上,旋转轴153由旋转底板152向下伸出。一旋转底座154固定在旋转底板152上,旋转底座154以可旋转方式经过轴承155安装在中空的固定底座156上。旋转轴153通过旋转底座154。旋转齿轮157固定在旋转轴153上,滑环158约束在旋转轴153的前端上。触头159接触滑环158,由主体装置经过滑环158和触头159提供驱动电源和控制信号。旋转电动机160安装在固定底座156的底面上,与旋转电动机160安装在固定底座156的底面上,与旋转电动机160的输出轴相连接的输出齿轮161与旋转齿轮157相啮合。一编码器150安装在旋转底座154和固定底座156之间,利用编码器150对旋转底座154和固定底座156之间的角度,即主体装置4相对于固定底座156之间的相对旋转角度进行检测,经此检测的旋转角度输入到旋转控制器169。利用旋转控制器169驱动旋转电动机160,因此控制旋转。
在固定底座156的下表面上形成有用于安装在三角架上的螺钉孔(未表示),利用该螺钉孔将固定底座156安装到三角架(未表示)上。参考标号46表示用于水平调节的螺钉。
下面结合图2,将介绍光学和控制系统。
主体装置4包括一发射器162、旋转装置163、反射光检测器164、扫描控制器165、发光元件驱动装置166和准直显示装置167。
首先,介绍发射器162。
在激光二极管101的光轴上,由激光二极管101方看按这样的顺序配置准直透镜102和孔镜103。由激光二极管101发射的激光束经过准直透镜102转为平行光束,该光束经过孔镜103朝向旋转装置163。由激光二极管101利用发光元件驱动电路166发出光束。由发光元件驱动电路166对该光调制,由激光二极管101发射的激光束可以由其它外部光束鉴别。
旋转装置163将由发射器162发射的激光束朝向水平方向用以进行扫描。用于使来自发射器162的激光束的光轴偏转90°角的五边形棱镜18以这样一种方式支承,即使其围绕发射器162的光轴可以旋转。此外,利用扫描电动机15经过齿轮16和扫描齿轮7使其旋转。以与五边形棱镜的旋转轴相关连的方式装设编码器105。
编码器105包含一转子109和检测器107,它是一种装有用于表示基准位置的指示器108的增量式编码器(图5)。通过对由指示器108指定的基准位置输出进行计数,可以检测距基准位置的角度。用于表示基准位置的指示器108以这样一种方式配置,即当旋转激光束的照射方向与倾斜设定机构的倾斜方向相对准时,即激光束平行于该任选角度设定汽泡管65时,由检测器107来检测该指示器。
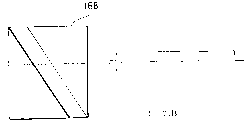
当由旋转装置163发出的激光束照射时,目标反射器168反射激光束朝向旋转装置163。在图3A和4A中表示了目标反射器168。在图3A中所示的目标反射器具有一在基片121上的反射层122并反射来自旋转装置163的光,使光再次进入旋转装置163。反射层122是一种包含作为很小的棱镜的颗粒的反光表面。在图4A所示的目标反射器中,反射层122配置在基片121的两个侧面部分上。因此,有两个反射层,以便易于在由目标反射器168产生的反射光和由不需要的反射物产生的反射光之间进行鉴别。
当图3A中所示的目标反射器168被激光束扫描时,由目标反射器168反射的激光束转变为具有与图3B中所示的目标反射器168的反射激光束相同的宽度的脉冲式光束。当由激光束对图4A中所示的目标反射器168扫描时,由图4B中所示的目标反射器168反射的激光束呈现由图3B中的光束的形式变为双脉冲的形式,缺少了其中间的部分。
由目标反射器168反射的激光束入射五边形棱镜18。当入射五边形棱镜18时,反射的激光束偏转朝向穿孔镜103,该穿孔镜103将反射的激光束朝向反射光检测器164。
接着,对反射光检测器164进行介绍。
在来自穿孔镜103的反射光的光轴上,从穿孔镜103方看按这样的顺序即聚光透镜110和包含光敏二极管之类的第一光检测器114顺序地进行配置,以使第一光检测器114接收来自目标发射器168的反射激光束,以及第一光检测器114的输出则输入到反射光检测电路116。反射光检测电路116装有用于检测激光束中的光检测信号的电气式滤波器(未表示)。在来自第一光检测器114的光检测信号中,由其它外部信号提取和检测调制的激光束。此外,将该信号处理例如放大并输出到准直显示装置167。
准直显示装置167包含一位置鉴别器117和显示装置118。来自反射光检测电路116的表示第一光检测器114的光检测状态的信号输入到位置鉴别器117,以及还输入来自编码器105的用于检测旋转装置163上的五边形棱镜18的旋转位置的角度信号。来自编码器105的角度信号是一种当接收到来自目标反射器168的反射激光束时与光检测状态相对应的编码器105的角度以信号。因此,通过得到在接收来自图3所示的目标反射器168的反射激光束得到的信号(图3B)的前沿和后沿处的编码器105的信号,以及来自基准位置的角度信号,能够易于检测目标反射器168的重心和目标反射器168的中心的位置。此外,对于图4中所示的目标反射器168,通过得到在接收反射激光束得到的信号(图4B)的前沿和后沿处的编码器105的信号,以及来自基准位置的信号,可以检测目标反射器168的重心即目标反射器168的中心的位置。
位置鉴别器117由反射光检测电路116的光检测信号和编码器105的角度信号计算光检测信号的重心即目标反射器168的中心的位置,并将计算结果输入到显示装置118和旋转控制器169,假如主体装置4的方向是偏离的,显示装置118用箭头118a或118c指示主体装置4的校正方向。此外,例如主体装置4精确地与目标反射器168面对面地定位,由在中心处的显示指示器118b指示出来。
在下文中参照图5操作情况进行介绍。
在主体装置4的水平调节操作完成之后(图5A),利用扫描电动机15旋转该旋转装置163,由发射器162发射的激光束在水平面上扫描。由编码器105检测旋转装置163的旋转位置。在与旋转装置163整体旋转的旋转编码器105的板上,标有用于发出角度脉冲的主刻度和用于表示基准位置的指示器108。在主体装置4的安装侧上的编码器105上的检测器107发出由主刻度产生的角度脉冲和由指针108产生的基准位置脉冲。编码器105和主体装置之间的机械相互关系按照这样一种方式确定,即使激光束朝向主体装置4的正前方向或基本上朝着倾斜设定机构的倾斜方向。当安装主体装置4时,通常主体装置4并不是精确地朝前面向目标反射器168。如图5B所示,在图中假设主体装置4逆时针偏离角度ω。
当激光束扫描该平面和旋转装置163旋转时,检测器107检测指示器108。然后,确认该基准面,利用编码器105由检测的位置(图5C)来检测旋转装置163的旋转角度。此外,旋转装置163旋转,并且当激光束通过目标反射器168时,来自目标反射器168的反射激光束经过旋转装置163和穿孔镜103进入反射光检测器164,第一光检测器114发出光检测信号。反射光检测电路116提取该仅包含激光束的光检测信号并将其输入到位置鉴别器117。在位置鉴别器117,计算目标反射器168的中心位置,读出来自编码器105的相对该中心位置的角度信号。这一角度不是别的而是主体装置4相对目标反射器168的方向偏差即角度ω(图5D)。对于ω的方向或大小由箭头118a、显示指示器118b或箭头118c来表示。将角度信号ω输入到旋转控制器169。旋转控制器169向旋转电动机160发出驱动信号将其驱动,旋转电动机160经过输出齿轮161和旋转齿轮157旋转主体装置4使之朝向欲校正的方向。由编码器150检测主体装置4的旋转角度,当由编码器150检测的角度变为ω(图5E)时,旋转电动机160停止。
当主体装置4精确地朝前面向目标反射器168时,设定了仰角θ,驱动扫描电动机15使照射激光束进行扫描。然后形成一基准面,该基准面相对于目标成一仰角θ产生倾斜。
对主体装置4的方向检测并不限于用编码器150。
下面参照图6对第二实施例进行介绍。在第二实施例中,目标反射器168具有一形成在基片121上的反射层122,如图8所示。在图中的左半部,附有λ/4的双折射元件123。因此,反射层122的露出部分用作偏振光维持反射元件,其在维持入射光束的偏振方向的同时,反射该光,λ/4双折射元件123用作经变换的偏振光反射元件,其在变换入射光束的偏振方向的同时,反射该光,因此提供了不同的偏振方向。
反射层122包含一种反向反光材料,即其具有很多很小的直角棱柱体的或球形物体反射器。λ/4双折射元件123具有这样一种功能,即使偏振光反射光束相对入射光束产生λ/4的相位差。
下面对在第二实施例中的主体装置4进行介绍。
在发射线性一偏振激光束的激光二极管101的光轴上,从激光二极管101方看按这样的顺序即准直透镜102、第一λ/4双折射元件104和穿孔镜103依次分布。由激光二极管101发射的线性偏振激光束利用准直透镜102转为平行光束,利用第一λ/4双折射元件104进一步变换为圆偏振光。经过穿孔镜103使圆偏振激光束朝前指向旋转装置163。旋转装置163沿水平方向投射来自发射器162的激光束。
来自目标反射器168的偏振反射激光束进入旋转装置163。在进入五边形棱镜18时,偏振光反射激光束被偏转朝向穿孔镜103,在~孔镜103上该偏振光反射激光束被反射朝向反射光检测器164。
下面对反射光检测器164进行介绍。
在穿孔镜103的反射光的光轴上,从穿孔镜103方看按这样的顺序即聚光透镜110、第二λ/4双折射元件111、针孔112、偏振光束分离器113以及包含光敏二极管之类的第一光检测器114依次分布各元件,以及将包含光敏二极管之类的第二光检测器115分布在偏振光束分离器113反射光轴上。将来自第一光检测器114和第二光检测器115的输出输入到反射光检测电路116上。
偏振光束分离器113对进入反射光检测器164的偏振反射激光束进行分离,使分离的光束进入第一光检测器114和第二光检测器115。以这样一种方式配置第二λ/4双折射元件111和偏振光束分离器113,即使由发射器162发射的激光束穿过λ/4双折射元件123二次以及返回到主体装置的偏振反射激光束进入第一光检测器114,以及使具有与上述激光束不同偏振方向的来自反射层122的激光束进入第二光检测器115。
下面参照图7对检测偏振反射光束的反射光检测电路116的一个实例进行介绍。
第一光检测器114和第二光探测器115的输出经过放大器131和135输入到差分放大器132,差分放大器132的输出经过同步检测器133输入到差分放大器134。第一光控测器114和第二光探测器115的输出经过放大器131和135输入到加法放大器136。加法放大器136的输出经过同步检测器138输入到差分放大器139。差分放大器139和134的输出输入到扫描控制器165、光发射元件驱动电路166、以及准直显示装置167。光发射元件驱动电路166根据来自反射光检测电路116的时钟作信号对由激光二极管101发射的偏振激光束进行脉冲调制。
根据由振荡电路140产生的时钟信号利用光发射元件驱动电路116对驱动的激光二极管101发射的偏振激光束进行调制。利用准直透镜102使由激光二极管101发射的线性偏振激光束变为平行光束,并且在通过第一λ/4双折射元件104之后该光束变为圆偏振激光束。圆偏振激光束通过穿孔光镜103,利用五边形棱镜18沿水平方向反射并照射。
利用扫描电动机15经过齿轮16和扫描齿轮17旋转五边形透镜18。起始五边形棱镜18在所有圆周方向范围内旋转,由五边形棱镜18照射的偏振激光束沿所有圆周方向扫描。
通过沿所有的圆周方向扫描,偏振激光束通过目标反射器168。当偏振激光束通过目标反射器168时被其反射,偏振反射激光束进入五边形棱镜18。如上所述,目标反射器168的一半是一简单的反射层122,在另一半上则附有λ/4双折射元件123。因此,由反射层122的露出部分反射的偏振反反射激光束是圆偏振光,维持入射的偏振激光束的偏振方向。通过λ/4双折射元件123并被反射层122反射的偏振反射激光束进一步通过λ/4双折射元件123,变为圆偏振激光束,相对于入射的偏振激光束的偏振方向相位偏移λ/2。因此,取决于各反射面各偏振方向是不同的。
利用五边形棱镜18使由目标反射器168反射的偏振反射激光束偏转90°角,并且进入穿孔镜103,其反射该反射激光束使之朝向聚光透镜110。聚光透镜110使反射激光束作为会聚光朝向第二λ/4双折射元件111。返回作为圆偏振光,该反射激光束由第二λ/4双折射元件111变为线性偏振光并进入针孔112。如上所述,由反射层122的露出部分反射的反射激光束与由λ/4双折射元件反射的反射激光束的不同在于相位偏移λ/2,在利用第二λ/4双折射元件111变为线性偏振光的两个反射激光束之间偏振面是不同的且偏移90°。
针孔112所起作用在于其不允许这样的反射激光束即不精确面向且其光轴与由主体装置4发射的激光束的光轴有偏移的反射激光束进入第一光检测器114和第二光检测器115,反射激光束在通过针孔112之后,进入偏振光束分离器113。
偏振光束分离器113允许与由发射器162发射的偏振激光束的偏振方向相同的激光束通过,而将与由发射器162发射的偏振激光束偏振方向不同偏移90°的激光束反射。因此,当通过偏振光束分离器113时,该反射激光束分离为由偏振光束分离器113形成的彼此垂直传输的二偏振光分量,第一光检测器114和第二光检测器115分别接收二分离的反射激光束。
在第一光检测器114和第二光检测器115的光接收状态下,当在主体装置4以外二次通过λ/4双折射元件后的偏振反射激光束,即由目标反射器168的λ/4双折射元件123反射的偏振反射激光束进入反射光检测器164时,由于第二λ/4双折射元件111和偏振光束分离器113间的相互作用,使进入第一光检测器114的光量高于进入第二光检测器115的光量。此外,当偏振反射激光束没通过λ/4双折射元件 ,即由目标反射器168的反射层122的露出部分反射该偏振反射激光束时,进入第二光检测器119的光量高于进入第一光检测器114的光量。
通过求出输入到第一光检测器114的偏振反射激光束的入射光量和输入到第二光检测器115的入射光量之间的差,能够确定入射的偏振反射光束是由目标反射器168的反射层122的露出部分反射的还是由λ/4双折射元件23所反射的。即能够检测反射层122的露出部分和λ/4双折射元件123之间的边界 ,即目标反射器168的中心。
下面进行更详细的介绍。
假如反射激光束通过λ/4双折射元件123两次之后,进入反射光检测器164的第一光检测器114的光量高于进入第二光检测器115的光量。在图9的a和b表示了各种信号。来自第一光检测器114和第二光检测器115的信号由放大器131和135放大,利用差分放大器132取差。这一信号由图9中c的表示。当利用来自振荡器电路140的时钟信号1以同步方式检测差分放大器132的输出信号时,得到偏置电压的正的电压(图9中的d表示)。当利用时钟信号2进行同步检测时,得到偏置电压的负电压(图9中e表示)。取通过同步检测(d-e)得到的二电压之间的差,得到作为偏置电压的正的电压(图9中f表示)的差分放大器134的输出。
假如反射激光束没有通过λ/4双折射元件123,进入反射光检测器164的第二光检测器115的光量高于进入第一光检测器114的光量。在图中用h和i表示了各种信号。由放大器131和135放大来自第一光检测器114和第二光检测器115,由差分放大器132取该差。在图中用j表示该信号。当利用振荡器电路140的时钟信号1以同步方式检测差分放大器132的输出信号时,得到偏置电压的负的电压(在图9中用k表示)。当利用时钟信号2进行同步检测时,得到偏置电压的正的电压1在图9中用L表示)。取通过同步检测(k-e)得到的二电压间的差,得到作为偏置电压的负的电压的差分放大器的输出(在图9中用m表示)。
假如利用偏振激光束对图8中或10A中的目标反射器168进行扫描,反射光检测电路116的差分放大器134的输出具有如图10B所示的波形。假如在差分放大器134的输出端有正的信号,以及在由正信号的下降开始的指定时间范围内发现负的信号的下降,位置鉴别器117就识别出是目标反射器168并且进一步确定边界的位置(其中信号值为0)是目标反射器168的中心。假如目标反射器168被使用,假如偏振激光束反向旋转,无需说,反射光检测电路116的差分放大器134的输出信号的符号(+或-)被反向。
在目标反射器168的中心已被识别之后对主体装置4的方向校正与对上述实施例的所作介绍相似,这里不再详细介绍。
参照图11对第三实施例进行介绍。在第三实施例中,发射器162以这种方式加以变化,即由激光二极管101发射的激光束还沿向下的方向发射。
将激光二极管101的光轴朝向与激光投射器10的旋转中心相垂直的方向,将半棱镜125设在交义点上。此外,将反射镜126置于半棱镜125的与激光二极管101相反的一侧的某一位置上,将聚光透镜127置于半棱镜125和激光二极管101之间。由激光二极管101发射的和由半棱镜125反射的激光束朝前面向五边形棱镜18,通过半棱镜125由反射镜126反射再由半棱镜125反射的激光束被指向朝下的方向。由于激光束沿朝下的方向发出,能够易于识别主体装置4是否被正确地安装在基准位置上,这便利于将主体装置4设定在基准位置的操作。
图13表示了一个实施例,其中取消了主体装置旋转器151,以及根据在显示装置118上的显示手动方式校正测量器主体装置4的方向。与图1中相同的组成元件使用相同的符号,这里不再对其详细介绍。
如图14所示,旋转底板152安装在电池箱45的下表面上,旋转轴153在比旋转底板152低的位置伸出。旋转底座154固定在旋转底板152上,旋转度座154以可旋转方式经过轴承155安装在中空的固定底座156上。旋转轴153通过旋转底座154。一固定套环145与旋转轴153相约束,蜗轮147与旋转轴153的下端利用其间的波形垫圈146相连接。装设一个以可旋转方式通过固定的底座156的细调杆142,与蜗轮147相啮合的蜗轮到143形成在细调杆142的前端。在固定的套环145中,拧入以可旋转的方式通过固定的底座156的固定螺钉148,固定螺钉148的前端可以与旋转轴153形成接触。
下面对主体装置4的方向调节进行介绍。
为了进行粗调,松开固定螺钉148,沿指定的方向手动旋转主体装置4。在蜗轮147和旋转轴153之间施加由波形垫圈146引起摩擦力,以及当旋加在主体装置4上的旋转力增加大于摩擦力时,能够手动旋转主体装置4。为了细调旋转细调杆142,经过蜗轮到143和蜗轮147旋转主体装置4进行细调。
可以精确地使主体装置4朝着指定的方向。当主体装置4的方向确定时,上紧固定螺钉148以使锁紧主体装置4。
在另一实施例中,编码器的指示器可以位于多个位置,例如0°、90°、180°、270°等,通过将目标反射器的位置与这些位置中的每一个位置相比较可以易于核实目标反射器的位置。通过在多个位置上提供指示,可以很快地识别主体装置4。或者可以将在0°、90°、180°和270°处具有基准位置检测标志的角度显示盘129装在显示装置118上,使得利用在角度显示盘129上的光点显示主体装置4的方向,以及测量仪可以用视觉方式看出主体装置4的方向。半棱镜125可以是一种例如半透明镜、光束分离器之类的光学元件,以便分离激光束。此外,在上述实施例中,激光测量仪具有的机构可沿两个方向倾斜,然而无需说,本发明可以适用于其机构仅沿一个方向倾斜的激光测量仪
在图1所示的实施例中,通过反馈控制利用编码器150检测的主体装置4相对固定底座156的旋转角度来校正主体装置4的方向,采用伺服电动机之类用作旋转电动机,而编码器150是可以取消的。在这种情况下,脉冲电动机适于用作该电动机下面介绍它的工况。
利用旋转电动机160经过旋转齿轮157沿校正的方向旋转主体装置4。在旋转主体装置4的同时,旋转装置163被旋转。旋转装置163旋转时,激光束照射到目标反射器168上。当检测来自目标反射器的反射光时,计算其偏差。当重复上述过程,使偏差变为0时,就确定主体装置4的方向与预定方向对准,主体装置已经旋转ω角度,朝向校正的方向。
在上述实施例中,目标反射器(目标)168位于在一倾斜的方向上并处在倾斜位置上,仪器本身的方向通过使主体装置4近似转到该方向上进行校正。通过改变目标反射器168,可以校正其本身的倾斜角,并进行正确地设定。
在下文中,参照图15将对第四实施例进行介绍,其中可以校正倾斜方向和倾斜角度。图15是如上述与图2相对应的实施例的控制系统的方块图。该仪器的机械部分和光学系统与上述实施例相同,不再进行详细介绍。下面参照图1介绍。
在下文中,将仅对与图2的实施例不同的特征进行介绍。
位置鉴别器117的输出输入到控制器171,该控制器总体控制:用于控制水平调节电动机31和32的电动机控制器89和90、用于控制倾斜调节电动机58和59的驱动电路83和84、用于指示倾斜角的控制器96以及用于控制旋转主体装置4的旋转装置163的旋转的旋转控制器169。
手动控制器172和173连接到电动机控制器89和90。通过手动操作手动控制器172和173,可以直接控制水平调节电动机31和32。手动控制器172和173装有按钮开关式轻触开关,以便控制电动机的旋转方向和速度。
下面参照图16A、16B、16C和18对这一实施例的工况进行介绍。
将仪器安装在指定的位置,在该处需利用三角架调节倾斜。将主体装置4近似朝向需倾斜的方向。在这种情况下,可以使用属于主体装置4的前和后瞄准尺。将目标反射器168安装在应进行倾斜调节的位置上(图16A)。
这里结合图20A对用在这一实施例中的目标反射器168进行介绍。在这一目标反射器中,各反射层122位于对称的位置上,即相对基片121白的中心位于上、下、左和右方上。在图20A中,各反射层122形成在呈矩形的基片121的周边区域上。当激光束沿垂直方向照射对目标反射器168进行扫描时,像沿水平方向扫描的情样接收如图20B所示的双脉冲的反射激光束。通过计算所接收的激光束的重心的位置,可以识别竖直方向的中心位置。
然后操作该仪器。在将仪器安放在水平基准面上以后,开始旋转照射激光束,沿倾斜方向进行扫描(图16B)。沿倾斜方向的扫描和机构的操作在上述实施例中已经作过介绍,这里不再详细介绍。
当来自目标反射器168的反射激光束被检测时,主体装置4旋转,调节设定倾斜方向。在倾斜方向已经设定时,旋转停止,同时将激光束照射到目标反射器168上。水平调节电动机31和32被控制操作,目标反射器10是倾斜的。在这种情况下,假如激光束近似处在目标的中心就足够了。
沿水平倾斜方向进行扫描并得到重心。与此同时,进行扫描。以使得到竖直方向的重心。进行往复扫描,检测上下反射层,得到重心。假如激光束偏离目标的中心,倾斜的方向由在显示装置上的箭头118d和118e来表示。当沿指定倾斜方向的倾斜度被设定时,控制器171操作倾斜调节电动机58和59。倾斜调节电动机58和59运转,倾斜调节板62倾斜,直到任选角度设定汽泡管65转到水平方向为止。通过由即时的倾斜直到任选角度设定汽泡管65转到水平方向止对倾斜调节电动机58和59的脉冲数进行变换,得到设定的倾斜角(图16C)。该角度显示在控制器171上的显示装置(未表示)上。倘若其时的倾斜度改变,使用手动控制器172和173的开关或轻触开关,同时注视显示装置118或控制器171的显示装置。倾斜调节电动机58和59被控制运转,脉冲数与需变化的倾斜度相对应,任选角度设定汽泡管65和66被倾斜。当水平调节电动机31和32被控制运转,使任选角度设定汽泡管65和66转入水平方向时,就改变了倾斜度。倾斜调节电动机58和59的脉冲数被转变为校正角度,并显示倾斜角。水平调节电动机31和32可以直接控制以改变倾斜度,该倾斜度可以由脉冲数变换并显示出来。
倘若如在图17A、17B和17C所示倾斜角很大在已经完成对水平基准面的设定之后,激光束照射位置明显偏离目标反射器168,一次进行对水平基准面的设定。然后转换到手动控制,利用属于主体装置的前后瞄准器,使该倾斜方向激光束照射方向倾斜近似面向目标反射器168的方向。利用激光束的反射可以核实沿转动方向的目标反射器。在安装之后,再次转换到自动扫描同时进行倾斜,在转换之后进行类似的设定操作。
假如使用图21A中所示的目标反射器168,下面将介绍其工况。
在目标反射器168上,没有反射层122的部分以对角方式呈带状分布,而反射层122分为2个部分:一个呈直角三角形的反射层122a,一个呈倒直角三角形的反射层122b,这二反射层以这样一种方式分布,即沿扫描方向反射层122a和122b划分的宽度当扫描位置移动时彼此成反比。
当使用目标反射器168时得到的信号如图21B所示,在同时存在由被分开的反射层122a和122b反射的反射激光束的信号的宽度的情况下即在根据两个反射层同时存在由编码器105得到各信号的情况下,需要得到的情况都会发现。因此,仅沿水平方向扫描而不沿竖直方向扫描就可以确定倾斜角的位置。由于不需要停止激光束的扫描,故作业效率高。
图22A也表示了一种实例,其中目标反射器168的反射层122被分为两个部分。在这一实例中,每个反射层122a和122b设计成峰脊状的三角形,其顶点彼此面向,相对竖直中心称分布。在这一目标反射器168上,通过沿水平方旋转扫描,像在图21A中的目标反射器168的实例中一样照射激光束。通过沿竖直方向移动扫描位置,可以检测沿竖直方向的位置中心。假如使用图22A中所示的目标反射器168,得到如图22B中所示的信号,该中心位于两个反射激光束的信号增加的方向上,以及该中心位于信号的最大值处。控制运转倾斜调节电动机58和59,通过检测中心位置测定倾斜度。该信号的数值并不局限于最大值,二反射层可以这样分布以求出最小值。
在图23中,目标反射器168的反射层以窄带的形式分布,两个沿侧端以及一个沿对角线,作为整体形成一N形反射层122。假如使用这一目标反射器168,利用激光束通过对目标反射器进行扫描反射的激光束信号变为3个脉冲信号,第二个信号位置依照扫描位置变化。当第二脉冲信号位置处在两端处的脉冲信号的中心时,该中心就是目标反射器168的中心。因此,通过检测三个脉冲位置,可以检测目标反射器168的中心。在目标反射器168的中心已被检测之后的操作与上述相同,这里不再详细介绍。
图26是与图6相对应的实施例的示意图,其中使用如在图27A中所示的目标反射器168。在矩形基片121上,分布有反射层122。在由对角线分开的两个部分中的一个部分上,附有一λ/4双折射元件123,另一半是反射层122的露出部分。该露出部分用作偏振光维持反射元件,该元件用于在维持入射光束的偏振方向的同时反射该光,而λ/4双折射元件123用作偏振光变换反射元件,其在变换入射光束的偏振方向的同时反射该光。以这样一种方式进行配置,即当在反射层122的露出部分和λ/4双折射元件123之间移动扫描位置时,扫描方向的宽度彼此按反比例变化。
在图26所示的实施例中,由发射器162照射圆偏振光束,在反射光检测器164中装一用于识别具有不同相位的反射激光束的光学系统。像在图6中所示的实施例中一样,在穿光镜103的反射光轴上,从穿光镜103方看为这样的顺序:即聚光透镜110、第二λ/4双折射元件111、针孔112、偏振光分离器113、包含光敏二极类的第一光检测器114,将它们依次配置,以及将包含光敏二极管之类的第二光检测器115配置在偏振光束分离器113的反射光轴上。来自第一光检测器114和第二光检测器115的输出输入到反射光检测电路116。
偏振光束分离器113将进入反射光检测器164的偏振反射激光束进行分离,并使分离的光束进入第一光检测器114和第二光检测器115。以这样一种方式配置第二λ/4双折射元件111和偏振光分离器113,即使由发射器162发射的且在2次通过λ/4双折射元件之后返回到主体装置的激光束,即偏振反射激光束进入第一光检测器114,而与上述激光束具有不同偏振方向的由反射层122反射的激光束进入第二光检测器115。
尽管没有详细解释,其装有如图7所示的用于检测偏振反射激光束的反射光检测电路116。
由反射层122的露出部分反射的反射激光束与由λ/4双折射元件123反射的反射激光束有λ/2的相位偏移。因此,在利用第二λ/4双折射元件111将两个反射激光束变换为线性偏振光时,偏振面偏移90°。因此,在由反射层122的露出部分反射的反射激光束和由λ/4双折射元件123反射的反射激光束之间,进入第一光检测器114的光量与进入第二光检测器115的光量不同,如图27B所示。
当激光束旋转照射对目标反射器168扫描以及扫描位置沿竖直方向移动时,信号的强度在由反射层122的露出部分反射的反射激光束和由λ/4双折射元件123反射的反射激光束之间按反比例关系变化。两个信号同时产生的点就是目标反射器168的中心,目标反射器的中心可以由反射光检测电路116来检测。在目标反射器的中心已被检测到后的操作与上述介绍相同。
下面参照图19,对假如使用在图21、22、23和27中所示的目标反射器的倾斜方向和倾斜角度的设定操作进行介绍。将仪器置于一水平基准面上,正如使用图20的目标反射器的情况一样,旋转照射激光束,沿倾斜方向进行扫描。当来自目标反射器168的反射光被检测时,旋转主体装置4,设定倾斜方向。
在倾斜方向已经设定之后照射激光束的同时,旋转该旋转装置163。控制操作水平调节电动机31和32,倾斜激光投射器10。
如上所述,在沿竖直方向对于目标反射器168改变照射位置的同时,进行沿水平方向的扫描。这样就可以检测目标反射器168的中心位置,无需停止仪器就可以设定倾斜角度并进行显示。
另外,参照图24、25A和25B对目标反射器168的一改进实例进行介绍。
正常情况下,当接收来自目标反射器的反射激光束时,光检测信号并不是一接收到光就立即清晰出现,而是由于反射激光束的光点的周边比其中心亮度较低,该信号开始多少有些双意不定性或倾斜的不确定性。当设有偏振光维持反射面和偏振光变换反射面以及检测两个面间的边界时,可以消除这种双意不定性或不确定性。
下面参照图24、25A和25B对目标反射器168进行介绍。在这一目标反射器168上,片状反射层122a和122b分别配置在基片121的左右部分上,在基片121的中心部分露出在片状部分之中。此外,λ/4双折射元件123a和123b重叠附着在每个反射层122a和122b的右半部,以及设有两组具有偏振光维持反射面和偏振光变换反射面的组合面的组合反射元件。可以按照这种方式配置反射层122a和122b,即不仅基片121的中心部分而且其周边部分都是露出的。此外,可以提供3组或更多的组合反射元件。
倘若利用激光束对如图25A所示的目标反射器168进行扫描,来自差分放大器134的输出信号如图25B所示,可以得到在非反射部分明确分为相反号(+和-)的两个信号。通过检测各信号的符号的转变点,即检测偏振光维持反射面和偏振光变换反射面之间的边界,可以消除信号起始端的双意不定性或不确定,并且能够精确地和正确地识别是不是由目标反射器反射的光束。此外,两个具有相反符号的信号间的时间差t对目标反射器168是特定的。因此通过检测时间差t,能够精确地识别是否是目标反射器168。即使当存在来自目标物体例如分层玻璃的反射光时,也能够易于识别由地板表面反射的反射光,不会产生错误的操作。
由于具有偏振光维持反射面和偏振光变换反射面的组合反射部分以带状形式分布,这两部分分布在基片121的两个侧边或分布在对角线方向上,如图23所示,因此能够精确地检测目标反射器的目标中心。
如上所述,根据本发明能够易于将激光测量仪与基准位置对准,这是因为测量仪器的安装方向由测量仪器本身来检测,因为没有人为误差和精确地进行检测,以及因为沿朝下的方向发射激光束。特别是当将激光测量仪安装在比地表面高的位置上时,更是有用的。
Claims (20)
1.一种激光测量仪。包括:至少一个用于发射激光束的主体装置和一个用于将来自所述主体装置的激光束反射朝向所述主体装置的目标反射器,其中,所述主体装置包括:一个用于发射激光束的发射器,一个用于旋转和扫描所述激光束至一个基准面的旋转装置,一个可使所述激光束至少在一个方向内以一个任选的角度倾斜的倾斜调节机构,一个与所述旋转装置连锁并用于检测所述激光束的照射方向的旋转角度检测器,一个用于检测来自所述目标反射器的反射光的反射光检测器,一个位置鉴别器,用于检测从所述主体装置至所述目标反射器的方向和在其内所述倾斜调节机构可通过所述反射光检测器与所述旋转角度检测器而进行倾斜的方向之间的偏差,以及一个用于根据所述位置鉴别器的检测来显示关于所述偏差的信息的显示装置。
2.一种激光测量仪,包括至少一个用于发射激光束的主体装置,一个用于旋转所述主体装置的主体装置旋转器和一个用于将来自所述主体装置的激光束反射朝向所述主体装置的目标反射器,其中,所述主体装置包括:一个用于发射激光束的发射器,一个用于使所述激光束照射至一个基准面的旋转装置,一个可使所述旋转装置至少在一个方向内以一个任选的角度倾斜的倾斜调节机构,一个与所述旋转装置连锁并用于检测所述激光束的照射方向的旋转角度检测器,一个用于检测来自所述目标反射器的反射光的反射光检测器,一个位置鉴别器,用于检测从所述主体装置至所述目标反射器的方向和在其内所述倾斜调节机构可通过所述反射光检测器与所述旋转角度检测器而进行倾斜的方向之间的偏差,以及一个旋转控制器,用于根据所述位置鉴别器的检测来控制所述主体装置旋转器的旋转,使得消除从所述主体装置至所述目标反射器的所述方向和在其内所述倾斜调节机构可进行倾斜的所述方向之间的所述偏差。
3.根据权利要求1所述的激光测量仪,其特征在于,所述位置鉴别器根据所述反射光检测器的检测来检测至所述目标反射器的方向的倾斜角和所述倾斜机构的倾斜角之间的偏差,并且所述显示装置显示所述偏差。
4.根据权利要求2所述的激光测量仪,其特征在于,所述位置鉴别器根据所述反射光检测器的检测来检测至所述目标反射器的方向的倾斜角和所述倾斜机构的倾斜角之间的偏差,并且所述倾斜机构被控制,使得所述倾斜机构的所述倾斜角与至所述目标反射器的方向的倾斜角准直。
5.根据权利要求1或2所述的激光测量仪,其特征在于,所述反射光检测器检测反射的光检测信号的重心位置并且识别所述目标反射器的中心。
6.根据权利要求1或2所述的激光测量仪,其特征在于,所述发射器调制所述激光束并且所述反射光检测器装有一个用于检测被调制的所述激光束的滤波器。
7.根据权利要求1所述的激光测量仪,其特征在于,从所述主体装置发射的所述激光束是圆偏振光,所述目标反射器包括一个偏振光维持反射面,用于在维持所述入射激光束的圆偏振光的同时反射该光,和一个偏振光变换反射面,用于反射与所述入射激光束的圆偏振光不同的的圆偏振光中的光,并且所述反射光检测器将从所述主体装置发射的圆偏振光的激光束与所发射的圆偏振光不同的圆偏振光的激光束分离开并检测所述目标反射器的两个反射面之间的边界。
8.根据权利要求1所述的激光测量仪,其特征在于,所述主体装置装在一个主体装置旋转器上,并且所述主体装置旋转器可以围绕一个竖直轴线旋转所述主体装置。
9.根据权利要求8所述的激光测量仪,其特征在于,所述主体装置旋转器设置成可手动旋转的,并且具有一个限制器,该限制器允许所述主体装置由一个超过一个预置能力的旋转能力旋转。
10.根据权利要求1或2所述的激光测量仪,其特征在于,所述旋转角度检测器是一个编码器并且所述编码器具有至少一个指示器。
11.根据权利要求1或2所述的激光测量仪,其特征在于,形成在所述目标反射器上的一个反射层的宽度沿竖直方向逐渐变化。
12.根据权利要求1或2所述的激光测量仪,其特征在于,形成在所述目标反器上的所述反射层的所述宽度在沿竖直方向的一个指定位置上具有一个极值。
13.根据权利要求1或2所述的激光测量仪,其特征在于,所述目标反射器具有分为两部分的反射层,并且当沿竖直方向位置变化时所述两个反射层的宽度是变化的。
14.根据权利要求1或2所述的激光测量仪,其特征在于,所述目标反射器具有多个带状反射层,并且在所述目标反射器被照射和扫描的情况下就反射多个脉冲式激光束。
15.根据权利要求1或2所述的激光测量仪,其特征在于,从所述主体装置发射的激光束是圆偏振光,所述目标反射器包括一个偏振光维持反射面,用于在维持所述入射激光束的圆偏振光的同时反射该光,和一个偏振光变换反射面,用于反射与所述入射激光束的圆偏振光不同的的圆偏振光中的光,并且当沿竖直方向位置变化时所述两个反射面的宽度是变化的。
16.根据权利要求11至15的其中之一所述的激光测量仪,其特征在于,所述目标反射器的照射和扫描位置沿竖直方向移动,并且根据从所述目标反射器反射的激光束的宽度的变化,所述反射光检测器沿竖直方向检测一个目标的中心。
17.根据权利要求3所述的激光测量仪,其特征在于,在检测到所述目标反射器的目标中心的情况下,根据来自所述倾斜机构的与所述倾斜机构的倾斜度对应的输出,在一个显示装置上显示一个离开水平面的倾斜角。
18.根据权利要求4所述的激光测量仪,其特征在于,在检测到所述目标反射器的目标中心的情况下,根据来自所述倾斜机构的与所述倾斜机构的倾斜度对应的输出,在一个显示装置上显示一个离开水平面的倾斜角。
19.根据权利要求1或2所述的激光测量仪,其特征在于,所述目标反射器具有分为上下部分的反射层,并且在沿竖直方向对于所述目标反射器照射和扫描所述激光束的情况下,通过测定从所述目标反射器所得到的反射激光束的重心位置来检测沿竖直方向的所述目标中心。
20.根据权利要求1所述的激光测量仪,其特征在于,设有一个手动设定机构,用于手动操作所述倾斜机构的倾斜设定。
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP4919695 | 1995-02-14 | ||
| JP49196/95 | 1995-02-14 | ||
| JP49196/1995 | 1995-02-14 | ||
| JP32819595A JP3582918B2 (ja) | 1995-02-14 | 1995-11-22 | レーザ測量機 |
| JP328195/1995 | 1995-11-22 | ||
| JP328195/95 | 1995-11-22 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1133969A CN1133969A (zh) | 1996-10-23 |
| CN1069404C true CN1069404C (zh) | 2001-08-08 |
Family
ID=26389571
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 96105910 Expired - Lifetime CN1069404C (zh) | 1995-02-14 | 1996-02-14 | 一种激光测量仪 |
Country Status (4)
| Country | Link |
|---|---|
| EP (2) | EP0727642B1 (zh) |
| JP (1) | JP3582918B2 (zh) |
| CN (1) | CN1069404C (zh) |
| DE (1) | DE69609431T2 (zh) |
Families Citing this family (56)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3908297B2 (ja) * | 1996-03-19 | 2007-04-25 | 株式会社トプコン | レーザ測量機 |
| JP3710112B2 (ja) * | 1997-01-21 | 2005-10-26 | 株式会社トプコン | レーザ測量機 |
| JP3897322B2 (ja) * | 1998-02-09 | 2007-03-22 | 株式会社トプコン | レーザ照射装置 |
| JP4033966B2 (ja) * | 1998-03-06 | 2008-01-16 | 株式会社トプコン | 建設機械制御システム |
| JP3937268B2 (ja) * | 1998-05-19 | 2007-06-27 | 株式会社トプコン | レーザー装置 |
| WO2000057005A1 (en) * | 1999-03-23 | 2000-09-28 | Lasers For Industry Limited | Alignment device |
| JP4526670B2 (ja) * | 2000-08-29 | 2010-08-18 | 株式会社トプコン | 建設機械制御システム |
| JP2007504459A (ja) * | 2003-09-05 | 2007-03-01 | ファロ テクノロジーズ インコーポレーテッド | 自己補償レーザトラッカ |
| JP4391217B2 (ja) * | 2003-12-16 | 2009-12-24 | 株式会社トプコン | 表面検査装置 |
| JP4913388B2 (ja) * | 2005-11-08 | 2012-04-11 | 株式会社トプコン | レーザ測量装置 |
| DE102006031580A1 (de) | 2006-07-03 | 2008-01-17 | Faro Technologies, Inc., Lake Mary | Verfahren und Vorrichtung zum dreidimensionalen Erfassen eines Raumbereichs |
| JP2009008479A (ja) * | 2007-06-27 | 2009-01-15 | Audio Technica Corp | レーザー墨出し器 |
| DE102009010465B3 (de) | 2009-02-13 | 2010-05-27 | Faro Technologies, Inc., Lake Mary | Laserscanner |
| DE102009015920B4 (de) | 2009-03-25 | 2014-11-20 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US9551575B2 (en) | 2009-03-25 | 2017-01-24 | Faro Technologies, Inc. | Laser scanner having a multi-color light source and real-time color receiver |
| DE102009035337A1 (de) | 2009-07-22 | 2011-01-27 | Faro Technologies, Inc., Lake Mary | Verfahren zum optischen Abtasten und Vermessen eines Objekts |
| US9529083B2 (en) | 2009-11-20 | 2016-12-27 | Faro Technologies, Inc. | Three-dimensional scanner with enhanced spectroscopic energy detector |
| US9210288B2 (en) | 2009-11-20 | 2015-12-08 | Faro Technologies, Inc. | Three-dimensional scanner with dichroic beam splitters to capture a variety of signals |
| DE102009055988B3 (de) | 2009-11-20 | 2011-03-17 | Faro Technologies, Inc., Lake Mary | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US9113023B2 (en) | 2009-11-20 | 2015-08-18 | Faro Technologies, Inc. | Three-dimensional scanner with spectroscopic energy detector |
| DE102009057101A1 (de) | 2009-11-20 | 2011-05-26 | Faro Technologies, Inc., Lake Mary | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| DE102009055989B4 (de) | 2009-11-20 | 2017-02-16 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| DE102010001014A1 (de) * | 2010-01-19 | 2011-09-08 | Koenig & Bauer Aktiengesellschaft | Rollenwechsler mit einer Absicherung eines Sicherheitsbereiches |
| US9628775B2 (en) | 2010-01-20 | 2017-04-18 | Faro Technologies, Inc. | Articulated arm coordinate measurement machine having a 2D camera and method of obtaining 3D representations |
| US9607239B2 (en) | 2010-01-20 | 2017-03-28 | Faro Technologies, Inc. | Articulated arm coordinate measurement machine having a 2D camera and method of obtaining 3D representations |
| US8276286B2 (en) | 2010-01-20 | 2012-10-02 | Faro Technologies, Inc. | Display for coordinate measuring machine |
| US9163922B2 (en) | 2010-01-20 | 2015-10-20 | Faro Technologies, Inc. | Coordinate measurement machine with distance meter and camera to determine dimensions within camera images |
| JP5560054B2 (ja) | 2010-01-22 | 2014-07-23 | 株式会社トプコン | 傾斜検出装置及びレーザ測量機 |
| JP5484976B2 (ja) | 2010-03-23 | 2014-05-07 | 株式会社豊田中央研究所 | 光走査装置及び距離測定装置 |
| JP5456532B2 (ja) * | 2010-03-25 | 2014-04-02 | 株式会社トプコン | 回転レーザ装置及び回転レーザシステム |
| DE102010020925B4 (de) | 2010-05-10 | 2014-02-27 | Faro Technologies, Inc. | Verfahren zum optischen Abtasten und Vermessen einer Umgebung |
| DE102010032723B3 (de) | 2010-07-26 | 2011-11-24 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| DE102010032725B4 (de) | 2010-07-26 | 2012-04-26 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| DE102010032726B3 (de) | 2010-07-26 | 2011-11-24 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| DE102010033561B3 (de) | 2010-07-29 | 2011-12-15 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US9168654B2 (en) | 2010-11-16 | 2015-10-27 | Faro Technologies, Inc. | Coordinate measuring machines with dual layer arm |
| DE102012100609A1 (de) * | 2012-01-25 | 2013-07-25 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US8997362B2 (en) | 2012-07-17 | 2015-04-07 | Faro Technologies, Inc. | Portable articulated arm coordinate measuring machine with optical communications bus |
| DE102012107544B3 (de) | 2012-08-17 | 2013-05-23 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US10067231B2 (en) | 2012-10-05 | 2018-09-04 | Faro Technologies, Inc. | Registration calculation of three-dimensional scanner data performed between scans based on measurements by two-dimensional scanner |
| DE102012109481A1 (de) | 2012-10-05 | 2014-04-10 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US9513107B2 (en) | 2012-10-05 | 2016-12-06 | Faro Technologies, Inc. | Registration calculation between three-dimensional (3D) scans based on two-dimensional (2D) scan data from a 3D scanner |
| JP6282074B2 (ja) * | 2013-09-30 | 2018-02-21 | 株式会社トプコン | レーザ測量システム |
| JP2015102487A (ja) * | 2013-11-27 | 2015-06-04 | 日立工機株式会社 | レーザ墨出し器 |
| JP2015143620A (ja) * | 2014-01-31 | 2015-08-06 | 株式会社デンソーウェーブ | レーザレーダ装置 |
| JP6541365B2 (ja) * | 2015-02-16 | 2019-07-10 | 株式会社トプコン | 姿勢検出装置及びデータ取得装置 |
| CN105606079A (zh) * | 2015-12-23 | 2016-05-25 | 浙江工业大学义乌科学技术研究院有限公司 | 一种利用光干涉的家装辅助定位装置 |
| CN105606078B (zh) * | 2015-12-23 | 2018-04-24 | 山东建筑大学 | 一种用于数字化建筑测绘的激光标线工具 |
| DE102015122844A1 (de) | 2015-12-27 | 2017-06-29 | Faro Technologies, Inc. | 3D-Messvorrichtung mit Batteriepack |
| CN107121129B (zh) * | 2017-06-09 | 2023-09-29 | 中国新兴建筑工程有限责任公司 | 一种旋转光束激光坡比监控仪 |
| CN110879408A (zh) * | 2019-11-19 | 2020-03-13 | 东软医疗系统股份有限公司 | Ct旋转编码器、ct机及检测扫描架旋转角度的方法 |
| JP7312989B2 (ja) * | 2020-02-26 | 2023-07-24 | パナソニックIpマネジメント株式会社 | レーザ墨出し器 |
| CN112611368B (zh) * | 2020-12-01 | 2022-08-05 | 西南交通大学 | 一种大地精密检测仪自动对齐信标装置 |
| DE102021111013A1 (de) * | 2021-04-29 | 2022-11-03 | Valeo Schalter Und Sensoren Gmbh | Kalibrierobjekt und Verfahren zum Bestimmen einer Position eines Einzelobjekts in einer Scanebene eines LiDAR-basierten Umgebungssensors |
| CN113985420B (zh) * | 2021-12-28 | 2022-05-03 | 四川吉埃智能科技有限公司 | 一种斜45°激光雷达扫描光路误差补偿方法 |
| CN115031684B (zh) * | 2022-04-25 | 2024-04-09 | 浙江图维科技股份有限公司 | 一种基于透镜组的隧道沉降报警系统及方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4062634A (en) * | 1975-02-10 | 1977-12-13 | Spectra-Physics, Inc. | System for controlling attitude of laser beam plane |
| US4519705A (en) * | 1982-09-16 | 1985-05-28 | Spetra-Physics, Inc. | Sighting cap for rotating laser beam transmitter |
| JP2829912B2 (ja) * | 1992-05-22 | 1998-12-02 | 株式会社トプコン | レーザ測量機 |
| JP3474605B2 (ja) * | 1993-06-25 | 2003-12-08 | 株式会社トプコン | 対象反射物体検出装置 |
-
1995
- 1995-11-22 JP JP32819595A patent/JP3582918B2/ja not_active Expired - Fee Related
-
1996
- 1996-02-12 EP EP19960300928 patent/EP0727642B1/en not_active Expired - Lifetime
- 1996-02-12 DE DE69609431T patent/DE69609431T2/de not_active Expired - Lifetime
- 1996-02-12 EP EP00100641A patent/EP1001250A3/en not_active Ceased
- 1996-02-14 CN CN 96105910 patent/CN1069404C/zh not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| DE69609431T2 (de) | 2001-03-08 |
| DE69609431D1 (de) | 2000-08-31 |
| JPH08285596A (ja) | 1996-11-01 |
| EP1001250A3 (en) | 2000-07-26 |
| EP0727642A1 (en) | 1996-08-21 |
| CN1133969A (zh) | 1996-10-23 |
| EP1001250A2 (en) | 2000-05-17 |
| EP0727642B1 (en) | 2000-07-26 |
| JP3582918B2 (ja) | 2004-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1069404C (zh) | 一种激光测量仪 | |
| CN1080412C (zh) | 激光旋转照射装置 | |
| CN1091876C (zh) | 激光水平仪 | |
| CN1221715C (zh) | 建筑机械控制系统 | |
| CN1081788C (zh) | 导向光束方向调节装置 | |
| EP3179209B1 (en) | Measuring instrument | |
| US7433028B2 (en) | Laser surveying instrument | |
| EP0854351B1 (en) | A laser survey instrument | |
| CN1673682A (zh) | 激光测定方法及激光测定系统 | |
| CN1880996A (zh) | 投影仪和调焦方法 | |
| JP2002286450A (ja) | レーザ照準装置 | |
| CN1550754A (zh) | 位移计和位移测定方法 | |
| CN1966335A (zh) | 一种显著提高车辆安全可靠驾驶性能的方法与装置 | |
| CN1932432A (zh) | 光波干涉装置 | |
| CN1666084A (zh) | 激光校准仪 | |
| JPH1038571A (ja) | 回転レーザ装置 | |
| CN1538157A (zh) | 自准直仪 | |
| JP2018066967A (ja) | 拡大観察装置および拡大観察装置の制御方法 | |
| CN1150660A (zh) | 目的物位置和斜度控制装置 | |
| CN1092794C (zh) | 倾斜角自动补偿装置 | |
| JP2013104895A (ja) | 接合レンズの自動心出し方法、及びその自動心出し方法に用いる心出しユニット装置、及びその心出しユニット装置を用いた接合レンズ製作装置 | |
| US20230228984A1 (en) | Dynamic detilt focus tracking | |
| JP3794599B2 (ja) | 光軸補償装置 | |
| CN1896793A (zh) | 光束射出装置及图像成像装置 | |
| JP4753657B2 (ja) | 表面形状測定装置及び表面形状測定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CX01 | Expiry of patent term |
Granted publication date: 20010808 |
|
| EXPY | Termination of patent right or utility model |