CN106625654B - 机器人控制装置、机器人系统及其方法 - Google Patents
机器人控制装置、机器人系统及其方法 Download PDFInfo
- Publication number
- CN106625654B CN106625654B CN201610899667.9A CN201610899667A CN106625654B CN 106625654 B CN106625654 B CN 106625654B CN 201610899667 A CN201610899667 A CN 201610899667A CN 106625654 B CN106625654 B CN 106625654B
- Authority
- CN
- China
- Prior art keywords
- robot
- force
- threshold value
- force component
- workpiece
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1628—Program controls characterised by the control loop
- B25J9/1633—Program controls characterised by the control loop compliant, force, torque control, e.g. combined with position control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/085—Force or torque sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0004—Braking devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/06—Program-controlled manipulators characterised by multi-articulated arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1674—Program controls characterised by safety, monitoring, diagnostic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1679—Program controls characterised by the tasks executed
- B25J9/1682—Dual arm manipulator; Coordination of several manipulators
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40202—Human robot coexistence
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40411—Robot assists human in non-industrial environment like home or office
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Manipulator (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111039538.XA CN113696182B (zh) | 2015-10-16 | 2016-10-14 | 机器人控制装置、机器人系统及其方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015-204942 | 2015-10-16 | ||
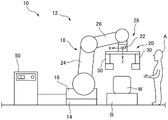
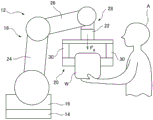
| JP2015204942A JP6577326B2 (ja) | 2015-10-16 | 2015-10-16 | 人と協働して物体を運搬するロボットを制御するロボット制御装置、ロボットシステム、およびその方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111039538.XA Division CN113696182B (zh) | 2015-10-16 | 2016-10-14 | 机器人控制装置、机器人系统及其方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN106625654A CN106625654A (zh) | 2017-05-10 |
| CN106625654B true CN106625654B (zh) | 2021-11-16 |
Family
ID=58456629
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201610899667.9A Active CN106625654B (zh) | 2015-10-16 | 2016-10-14 | 机器人控制装置、机器人系统及其方法 |
| CN202111039538.XA Active CN113696182B (zh) | 2015-10-16 | 2016-10-14 | 机器人控制装置、机器人系统及其方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111039538.XA Active CN113696182B (zh) | 2015-10-16 | 2016-10-14 | 机器人控制装置、机器人系统及其方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10232513B2 (https=) |
| JP (1) | JP6577326B2 (https=) |
| CN (2) | CN106625654B (https=) |
| DE (1) | DE102016012040B4 (https=) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6659629B2 (ja) | 2017-07-31 | 2020-03-04 | ファナック株式会社 | 多関節ロボットの制御装置 |
| JP6958091B2 (ja) * | 2017-08-08 | 2021-11-02 | セイコーエプソン株式会社 | ロボットシステム、及びロボット制御方法 |
| GB2574297B (en) * | 2018-03-28 | 2021-05-12 | Bae Systems Plc | Collaborative robot system |
| JP6916157B2 (ja) | 2018-10-23 | 2021-08-11 | ファナック株式会社 | 人と協働作業を行うロボットシステム、及びロボット制御方法 |
| US10369701B1 (en) * | 2018-10-30 | 2019-08-06 | Mujin, Inc. | Automated package registration systems, devices, and methods |
| DE102018127905A1 (de) * | 2018-11-08 | 2020-05-14 | Franka Emika Gmbh | Roboter und Verfahren zur Steuerung der Bewegung eines Roboters |
| KR102149008B1 (ko) | 2018-12-13 | 2020-08-31 | (주)미래컴퍼니 | 수술용 로봇의 충돌을 완화시키는 방법 및 시스템 |
| JP7135823B2 (ja) * | 2018-12-17 | 2022-09-13 | 株式会社安川電機 | ロボットシステム及びロボットの制御方法 |
| JP7458818B2 (ja) | 2020-02-21 | 2024-04-01 | キヤノン株式会社 | ロボット装置、インタフェース装置、制御装置、エンドエフェクタ、制御方法、ロボット装置を用いた物品の製造方法、プログラム及び記録媒体 |
| US11794345B2 (en) * | 2020-12-31 | 2023-10-24 | Sarcos Corp. | Unified robotic vehicle systems and methods of control |
| WO2022230200A1 (ja) * | 2021-04-30 | 2022-11-03 | ファナック株式会社 | ロボット制御装置 |
| US20240198525A1 (en) * | 2022-12-16 | 2024-06-20 | Semes Co., Ltd. | Gas supply automation system |
Family Cites Families (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2638415B2 (ja) * | 1993-01-25 | 1997-08-06 | 鹿島建設株式会社 | 揚重機とロボットの協調による大重量物の位置決め装置 |
| KR0167021B1 (ko) * | 1993-03-15 | 1999-02-01 | 카타다 테쯔야 | 자동연삭장치 |
| JP3152056B2 (ja) * | 1994-03-23 | 2001-04-03 | 三菱電機株式会社 | 産業ロボットの制御方法 |
| JP3235385B2 (ja) * | 1994-12-27 | 2001-12-04 | 日産自動車株式会社 | 複数ロボットの同時作業教示方法およびその装置 |
| US5691898A (en) * | 1995-09-27 | 1997-11-25 | Immersion Human Interface Corp. | Safe and low cost computer peripherals with force feedback for consumer applications |
| NL1004431C2 (nl) | 1996-11-05 | 1998-05-14 | Leenstra Machine En Staalbouw | Manipulator. |
| JP3999888B2 (ja) * | 1998-02-24 | 2007-10-31 | 松下電工株式会社 | 抱き上げ補助装置及びその制御方法 |
| JP2000176872A (ja) * | 1998-12-15 | 2000-06-27 | Toyota Motor Corp | マニピュレータ |
| JP3163346B2 (ja) | 1999-06-01 | 2001-05-08 | 経済産業省産業技術総合研究所長 | 物体協調運搬ロボットの制御方法及びその装置 |
| US6612143B1 (en) * | 2001-04-13 | 2003-09-02 | Orametrix, Inc. | Robot and method for bending orthodontic archwires and other medical devices |
| US20060240125A1 (en) * | 2005-04-21 | 2006-10-26 | Astrup Arne V | Composition for affecting weight loss |
| US7212886B2 (en) * | 2002-12-12 | 2007-05-01 | Kabushiki Kaisha Yaskawa Denki | Robot control apparatus and method |
| JP4255321B2 (ja) * | 2003-06-25 | 2009-04-15 | 本田技研工業株式会社 | アシスト搬送方法及びその装置 |
| JP4168441B2 (ja) * | 2003-07-16 | 2008-10-22 | 株式会社安川電機 | 搬送装置 |
| JP4294646B2 (ja) * | 2003-07-29 | 2009-07-15 | パナソニック株式会社 | ロボットアームの制御方法および制御装置 |
| US20060293617A1 (en) * | 2004-02-05 | 2006-12-28 | Reability Inc. | Methods and apparatuses for rehabilitation and training |
| WO2006046295A1 (ja) * | 2004-10-28 | 2006-05-04 | Mitsubishi Denki Kabushiki Kaisha | エレベータ用回転機の制御装置 |
| JP4317518B2 (ja) * | 2004-12-14 | 2009-08-19 | 本田技研工業株式会社 | 物品運搬システム |
| JP2007098501A (ja) * | 2005-10-04 | 2007-04-19 | Yaskawa Electric Corp | ロボットシステム |
| JP2008188722A (ja) * | 2007-02-06 | 2008-08-21 | Fanuc Ltd | ロボット制御装置 |
| EP1955830B1 (en) * | 2007-02-06 | 2014-04-09 | Abb Research Ltd. | A method and a control system for monitoring the condition of an industrial robot |
| JP2009066685A (ja) * | 2007-09-11 | 2009-04-02 | Sony Corp | ロボット装置及びロボット装置の制御方法 |
| JP4445038B2 (ja) | 2008-02-06 | 2010-04-07 | パナソニック株式会社 | ロボット、ロボットの制御装置及び制御方法、並びに、ロボットの制御装置の制御プログラム |
| CN102046059A (zh) * | 2008-08-08 | 2011-05-04 | 松下电器产业株式会社 | 吸尘器的控制装置及控制方法、吸尘器、吸尘器的控制程序以及集成电子电路 |
| WO2011036865A1 (ja) * | 2009-09-28 | 2011-03-31 | パナソニック株式会社 | ロボットアームの制御装置及び制御方法、ロボット、ロボットアームの制御プログラム、及び、ロボットアーム制御用集積電子回路 |
| CN202220621U (zh) * | 2011-08-31 | 2012-05-16 | 淮南矿业(集团)有限责任公司 | 矿井物料装载控制装置和矿井物料装载系统 |
| US9140598B2 (en) * | 2011-09-20 | 2015-09-22 | Ishida Co., Ltd. | Mass measurement device |
| DE102012103515A1 (de) | 2012-04-20 | 2013-10-24 | Demag Cranes & Components Gmbh | Steuerverfahren für ein Balancier-Hebezeug und Balancier-Hebezeug hiermit |
| WO2013175777A1 (ja) * | 2012-05-23 | 2013-11-28 | パナソニック株式会社 | ロボット、ロボットの制御装置、制御方法、及び制御プログラム |
| JP5981811B2 (ja) * | 2012-09-06 | 2016-08-31 | 川崎重工業株式会社 | 搬送システム及び搬送システムの搬送方法 |
| CN104995001B (zh) * | 2013-02-13 | 2017-07-14 | 日本电产三协株式会社 | 工业用机器人以及工业用机器人的控制方法 |
| JP5698789B2 (ja) * | 2013-04-18 | 2015-04-08 | ファナック株式会社 | ワークを搬送するロボットの制御装置 |
| DE102013010290A1 (de) * | 2013-06-19 | 2014-12-24 | Kuka Laboratories Gmbh | Überwachen eines kinematisch redundanten Roboters |
| CN104670850B (zh) * | 2013-11-27 | 2017-08-25 | 深圳职业技术学院 | 用于传输坯料的供给装置及其装料机器人、加工系统 |
| US9452532B2 (en) * | 2014-01-27 | 2016-09-27 | Panasonic Intellectual Property Management Co., Ltd. | Robot, device and method for controlling robot, and computer-readable non-transitory recording medium |
| US20150224639A1 (en) | 2014-02-07 | 2015-08-13 | Control Interfaces LLC | Remotely operated manipulator and rov control systems and methods |
| JP5893666B2 (ja) * | 2014-04-14 | 2016-03-23 | ファナック株式会社 | 力に応じて動かすロボットのロボット制御装置およびロボットシステム |
| JP5820013B1 (ja) | 2014-04-30 | 2015-11-24 | ファナック株式会社 | ワークを把持して搬送するロボットの安全監視装置 |
| CN104150362B (zh) * | 2014-07-30 | 2016-03-02 | 合肥工业大学 | 用于机械式双索抓斗的作业动态监控系统与监测方法 |
| JP5926346B2 (ja) | 2014-09-25 | 2016-05-25 | ファナック株式会社 | 人間協調ロボットシステム |
| CN104626171A (zh) * | 2015-01-07 | 2015-05-20 | 北京卫星环境工程研究所 | 基于六维力传感器的机械臂碰撞检测与响应方法 |
-
2015
- 2015-10-16 JP JP2015204942A patent/JP6577326B2/ja active Active
-
2016
- 2016-10-07 DE DE102016012040.1A patent/DE102016012040B4/de active Active
- 2016-10-13 US US15/292,119 patent/US10232513B2/en active Active
- 2016-10-14 CN CN201610899667.9A patent/CN106625654B/zh active Active
- 2016-10-14 CN CN202111039538.XA patent/CN113696182B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| DE102016012040B4 (de) | 2025-04-17 |
| CN113696182B (zh) | 2024-09-10 |
| US10232513B2 (en) | 2019-03-19 |
| JP6577326B2 (ja) | 2019-09-18 |
| JP2017074660A (ja) | 2017-04-20 |
| CN113696182A (zh) | 2021-11-26 |
| CN106625654A (zh) | 2017-05-10 |
| DE102016012040A1 (de) | 2017-04-20 |
| US20170106541A1 (en) | 2017-04-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106625654B (zh) | 机器人控制装置、机器人系统及其方法 | |
| US10471603B2 (en) | System for conveying workpiece having external force monitoring function | |
| CN106393097B (zh) | 工业用机器人系统及其控制方法 | |
| US10564635B2 (en) | Human-cooperative robot system | |
| US10252415B2 (en) | Human collaborative robot system having safety assurance operation function for robot | |
| CN108381265B (zh) | 加工系统以及机械控制装置 | |
| CN105904455B (zh) | 基于外力而使机器人进行退避动作的人机协调机器人系统 | |
| US9821459B2 (en) | Multi-joint robot having function for repositioning arm | |
| US9868215B2 (en) | Object pick-up system and method for picking up stacked objects | |
| CN107877548B (zh) | 进行作业员与机器人的协同作业的生产系统 | |
| KR101879469B1 (ko) | 로봇 시스템의 퍼리퍼럴 구성요소를 제어하기 위한 방법 및 장치 | |
| US11235463B2 (en) | Robot system and robot control method for cooperative work with human | |
| US9776328B2 (en) | Robot control apparatus having function of detecting contact with object or person | |
| JP2023174156A (ja) | 産業用ロボットシステム | |
| CN108145728B (zh) | 机器人控制装置以及推定施加给机器人的干扰值的方法 | |
| JP2016117141A (ja) | 人との接触力を検出してロボットを停止させるロボット制御装置 | |
| CN113661138A (zh) | 机器人手、机器人以及机器人系统 | |
| US20160089787A1 (en) | Robot controller | |
| CN108724180B (zh) | 机器人系统 | |
| JP5906825B2 (ja) | ロボット | |
| JP6445114B2 (ja) | 外力監視機能を有するワーク搬送方法システム | |
| US20220288784A1 (en) | Control device, control method, and program | |
| US20220288785A1 (en) | Control device, control method, and program | |
| JP6426690B2 (ja) | バラ積みされた物品を取り出すための物品取出システム、および方法 | |
| CN112975948B (zh) | 控制方法以及机器人系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |