CN105943145B - 利用无线能量传输进行骨调整的装置与方法 - Google Patents
利用无线能量传输进行骨调整的装置与方法 Download PDFInfo
- Publication number
- CN105943145B CN105943145B CN201610320491.7A CN201610320491A CN105943145B CN 105943145 B CN105943145 B CN 105943145B CN 201610320491 A CN201610320491 A CN 201610320491A CN 105943145 B CN105943145 B CN 105943145B
- Authority
- CN
- China
- Prior art keywords
- energy
- implantable
- bone
- implantable device
- adjustment
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/72—Intramedullary pins, nails or other devices
- A61B17/7216—Intramedullary pins, nails or other devices for bone lengthening or compression
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers ; Bone stabilisers comprising fluid filler in an implant
- A61B17/7001—Screws or hooks combined with longitudinal elements which do not contact vertebrae
- A61B17/7002—Longitudinal elements, e.g. rods
- A61B17/7014—Longitudinal elements, e.g. rods with means for adjusting the distance between two screws or hooks
- A61B17/7016—Longitudinal elements, e.g. rods with means for adjusting the distance between two screws or hooks electric or electromagnetic means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers ; Bone stabilisers comprising fluid filler in an implant
- A61B17/7001—Screws or hooks combined with longitudinal elements which do not contact vertebrae
- A61B17/7002—Longitudinal elements, e.g. rods
- A61B17/7014—Longitudinal elements, e.g. rods with means for adjusting the distance between two screws or hooks
- A61B17/7017—Longitudinal elements, e.g. rods with means for adjusting the distance between two screws or hooks pneumatic or hydraulic means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers ; Bone stabilisers comprising fluid filler in an implant
- A61B17/7062—Devices acting on, attached to, or simulating the effect of, vertebral processes, vertebral facets or ribs ; Tools for such devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/72—Intramedullary pins, nails or other devices
- A61B17/7233—Intramedullary pins, nails or other devices with special means of locking the nail to the bone
- A61B17/7258—Intramedullary pins, nails or other devices with special means of locking the nail to the bone with laterally expanding parts, e.g. for gripping the bone
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/60—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like for external osteosynthesis, e.g. distractors, contractors
- A61B17/66—Alignment, compression or distraction mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/72—Intramedullary pins, nails or other devices
- A61B17/7233—Intramedullary pins, nails or other devices with special means of locking the nail to the bone
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/72—Intramedullary pins, nails or other devices
- A61B17/7291—Intramedullary pins, nails or other devices for small bones, e.g. in the foot, ankle, hand or wrist
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00212—Electrical control of surgical instruments using remote controls
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00398—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like using powered actuators, e.g. stepper motors, solenoids
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00411—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like actuated by application of energy from an energy source outside the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00535—Surgical instruments, devices or methods, e.g. tourniquets pneumatically or hydraulically operated
- A61B2017/00539—Surgical instruments, devices or methods, e.g. tourniquets pneumatically or hydraulically operated hydraulically
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/061—Measuring instruments not otherwise provided for for measuring dimensions, e.g. length
Abstract
提出一种用于哺乳动物骨调整的方法和装置,其中在所述哺乳动物体内植入一套向锚固到该骨中的锚固装置施加力的装置。该方法和装置在医疗与美容性质骨调整中具有实用性,所述医疗与美容性质骨调整包括举例来说先天畸形矫正、修复性整形外科手术等中的骨、关节或脊椎的延长、重塑与重整。
Description
本申请是申请日为2009年10月29日、申请号为200980153587.7、原发明名称为“利用无线能量传输进行骨调整的装置与方法”(授权时审查员依职权修改为“利用无线能量传输进行骨调整的装置”)的申请的分案申请。
技术领域
本发明涉及用于医疗与美容性质骨调整的方法与装置,尤其涉及用于调整人体或者动物体内骨的位置、长度、强度或者功能的植入式装置,例如但不限于植入式液压装置。
背景技术
固定断裂骨促进愈合之术业已践习数百年。肇始于简单的夹板和有时颇不卫生的绷带,石膏模型的发明开启了整形外科医学的新纪元。时至今日,沉重的石膏模型已渐为更轻的玻璃纤维代用品所取代。并且,除单纯外用的夹板和模型之外,各种内部支撑结构亦得到广泛采用。此类支撑结构包括直接固定到断裂骨上的夹板以及销与螺钉,它们用于在愈合期间将骨各部夹持在一起并加固断裂之处。进一步的例子包括板、穿孔支架、髓内针和螺钉等。它们可用诸如钛、陶瓷或者手术钢之类的惰性材料制成,也可由在体内被吸回或者融合的材料制成。或者,支撑结构在骨折完全愈合时通过手术取出。
与本发明尤为相关的另一类装置是其主体位于体外但接合体内骨的机械装置。此类装置的最简单形式是位于体外的金属杆形夹板,其固定于骨上锚固的销或螺钉上并伸出皮肤。更复杂的器具包括用于调整骨位置(例如向骨折部位施加牵张力)以校正复杂骨折、促进愈合或引导骨延长的工具,这种技术称为牵引成骨。
用于骨延长或重塑的外部装置或器械的一个例子是所谓的伊里扎洛夫(llizarov)器具,其在20世纪50年代首创于苏联并在20世纪80年代被引入欧洲。简而言之,这是一种穿过患者皮肤和组织固定至骨上的外部器械,用在可用于延长或重塑骨的外科手术中。这种类型的器具经常用来治疗复杂骨折,例如通常无法采用常规治疗技术的开放性骨折。它也可以用来治疗无法用其它技术修复的受感染的骨不连接。该器具和类似的器具还可用于矫正畸形。更多信息参见例如Snela等人,2000。
另一种器械是泰勒空间框架(TSF),一种采用伊里扎洛夫器具的若干部件及特征的外固定器。TSF是一种六足装置,由利用六根支杆连接至一起的两个铝制环组成。每根支杆都可独立地延长或缩短。当该器具利用线或半针连接至骨时,可沿六个轴(前/后,内翻/外翻,延长/缩短)操控被附骨。TSF可用来矫正角度畸形与平移畸形。既适用于成人又适用于儿童。用于急性骨折、骨连接不正、骨不连和先天畸形的治疗。既可用于上肢又可用于下肢。还有专门的脚环用于治疗复杂的足畸形。
一旦附连到骨,即可通过研究术后X-射线了解畸形的特性。接下来将角度畸形值和平移畸形值以及诸如环尺寸与初始支柱长度之类的参数输入专门的软件中。该软件随后会生成一份患者遵照的支柱变化“处方”。由患者每日调整支柱。通常情况下,骨畸形矫正将需要3-4周。一旦畸形已得到纠正,在骨愈合(这通常需要3-6个月,取决于畸形的性质和程度)期间框架仍留在腿上。
此种器具也可用于骨延长。该手术过程包括一期手术,在一期手术中,骨利用外科手术方式断裂并附连上环器具。随着患者恢复,断裂的骨开始向一起生长。在骨生长期间,通过旋转螺母的方式调整框架,从而增加两个环之间的空间。由于这两个环连接到断裂部位的对端,故而这种每日进行的调整以每天大约一毫米的速度使缓慢愈合的断裂部位分离开。这些每日步进的增长经一段时间之后明显延长了肢体。一旦延长阶段完成,则该器具留在肢体上以便愈合。患者可以拄着拐杖走动,且疼痛减轻。一旦愈合完成,则需二期手术来取出环器具。效果是肢体明显更长。在腿部延长的情况下,可能需要额外的手术来延长跟腱以适应增大的骨长度。此手术过程的主要优点是:由于该器具在骨恢复期间提供了完全的支撑,故而患者可以在此手术过程中保持活动。众所周知,患者活动与愉悦能加速恢复。
尽管这些外部器械是微创的(不产生大的切口),但并不能摈除并发症。常见疼痛并有可能为严重疼痛,但是可用止痛剂治疗。须仔细注意日常清洁和卫生以防止针部位感染。其它并发症包括肿胀和肌肉贯通。外部器械同样笨重,在日常生活中会造成不便且吸引不必要的注意。
可植入装置的例子如U.S.5415660中公开的由形状记忆合金驱动的可植入肢体延长钉。此项公开涉及由内筒和外筒组成的髓内钉,外筒封闭采用形状记忆合金的驱动器。根据U.S.5415660中的附图,该筒通过从骨外穿骨(例如在骨骺与骨干区域)固定的近端和远端锁螺栓附连到骨。
背景技术的另一个例子是U.S.5827286中的胫骨截骨固定装置,其包括可彼此相对伸缩移动的两个板组件以及一个只允许沿一个方向运动的棘轮机构。该装置适于附连到骨外部并利用接骨螺钉固定。
U.S.2005/0055025A1公开了可连接到关节或骨的不同种类骨植入物,推荐一种最初极为坚硬并吸收外部阻力或应力从而在愈合过程中保护譬如移植组织或者骨折部位的机构。有建议说,随着移植或骨折的愈合,该机构应逐步允许更多的运动。
EP 0 432 253公开了一种髓内钉,包括近端、远端和令该钉内部的杆旋转以纵向扩张该钉的机械、气动、液压、电气或电磁的驱动器。该钉具有用于与横穿骨和髓内钉设置的紧固钉或紧固螺钉匹配的加固孔。
U.S.5156605涉及在整形外科和创伤医学中使用的医疗设备,并特别针对用于压缩-牵引-扭转器具的驱动系统。一个实施例涉及一种可完全植入患者骨中的髓内装置,该髓内装置具备马达驱动、控制器和电池功能以及无线电频率或电磁场信号,以便医生从患者体外调整牵引速度和节奏。该装置显示为用贯穿骨干及该装置两端部的钉或螺钉锚固至骨上。
与已知设备相关的另一个问题是,需要由患者自己或由医务人员每日调整牵张力。当患者负责调整器具时,存在因疼痛或心理不适而导致依从性差的风险。
此外,由于有迹象表明,间歇性负荷(Consolo等人,2006年)、循环牵引和压缩(Hente等人,2004)和均匀振动力促进成骨和成骨细胞的分化(Gabbay,2006年),故而传统机械装置尚有改进余地。
本发明的一个目的是克服与已知外部和内部机械器械及夹板相关的问题。
另一个目的是提供用于治疗和美容目的涉及牵引成骨的新的治疗方法和装置。
在深入研究本说明书、非限制性示例、权利要求书和附图之后,本发明的进一步目的以及与本发明的实施例相关的优点对于技术人员来说将变得明显。
发明内容
本发明涉及一种用于哺乳动物骨调整的可植入装置,包括至少一个适于与所述骨相关地植入的细长装置,其中所述用于骨调整的装置进一步包括用于调整所述至少一个细长装置的至少一个骨相关机械参数的调整装置,其中所述调整装置被构造为在术后调整所述骨相关机械参数,并且其中所述用于骨调整的可植入装置适于采用无线方式直接或间接供能,并适于接收从外部源以非侵入性方式传输的无线能量以便由所述调整装置调整所述至少一个骨相关机械参数。
在根据本发明一个实施例的装置中,所述骨相关机械参数涉及骨延长、骨缩短、骨折愈合、骨角改变、骨旋转、骨曲度或扭矩调整、骨重塑、关节或脊椎重组或重定位、脊柱形状重整或支撑或上述之组合。
根据另一实施例,所述骨相关机械参数包括下述至少一个:使界定骨折的至少两块骨部分在一段时间彼此靠近在愈合过程的初始阶段具有益影响,并使界定骨折的所述至少两块骨部分在一段时间彼此远离在愈合过程的骨形成中具有益影响。
为更好地了解该领域,下文表1中给出了示例的一份非排它性列表。可以想见,倘若就尺寸、力以及位置进行必要修改的话,技术人员可将根据本发明的装置与方法应用到任一示例中。但是这些修改可能在技术人员无需付出创造性努力的范畴之内。
表1、认为有可能利用根据本发明的装置与方法治疗的疾病的示例
-先天性畸形(出生缺陷),例如先天性短股骨;腓骨半肢畸形(缺少腓骨,腓骨是位于膝盖和脚踝之间的两块骨头中的一块);半侧萎缩(身体半侧萎缩);和奥利埃氏病(Ollier’s disease)(也称为多发性内生软骨瘤病,软骨发育异常和内生软骨瘤病)。
-发育畸形,例如神经纤维瘤(一种引起一条腿过度生长的罕见疾病);和由软骨病(佝偻病)或继发性关节炎造成的弓形腿。
-创伤后损伤,例如生长面骨折;骨连接不正或骨不连(骨折后骨不完全连接或者在错误的位置连接);缩短和畸形;及骨缺损。
-感染与疾病,例如骨髓炎(通常由细菌引起的骨感染);化脓性关节炎(感染或细菌性关节炎)和脊髓灰质炎(一种可导致肌肉萎缩造成永久性畸形的病毒性疾病)。
-肿瘤切除后重建。
-身材矮小症,例如软骨发育不全症(侏儒症的一种形式,表现为臂和腿很短但躯干尺寸相对正常);和天生身材矮小症。
根据本发明的再一实施例,两个或更多个锚固装置适于从该骨外部接合该骨。
根据另一实施例,两个或更多个锚固装置适于接合该骨的皮质部分。
根据另一实施例,所述两个或更多个锚固装置适于从骨髓内腔内部接合该骨。
根据另一实施例,所述至少两个锚固装置从销、螺钉、胶、倒钩结构、锯齿结构、扩张元件及其组合或其它机械连接组件中选取。
根据再一实施例,由该调整装置施加的力是延长该骨长度的纵向力。
根据一个实施例,所述由该调整装置施加的力指向骨髓腔的端部。
根据一个实施例,所述由该调整装置施加的力是纵向力,调整该骨的角度或曲度。
根据一个实施例,所述由该装置施加的力应用扭力至该骨,调整该骨沿其纵轴的扭矩。
根据可与本文中所提出的任何实施例自由组合的又一实施例,所述装置为柔性的以便导入该骨髓腔中。
根据一个实施例,所述装置至少部分为弹性的。
根据一个实施例,所述装置包括弹簧。
根据一个实施例,所述装置在已被弯曲之后恢复其形状。
根据可与本文中所提出的任何实施例自由组合的又一实施例,所述锚固装置适于可在被植入哺乳动物体内时由所述调整装置调整,以便相对该骨接合并固定该锚固装置。
根据一个实施例,该锚固装置包括用于使所述锚固装置相对该骨接合并相对该骨固定的螺纹。
根据另一实施例,该锚固装置包括至少部分垂直于该细长装置的纵向延伸部扩展以便相对该骨接合并固定该锚固装置的可扩展部分。
根据另一实施例,该调整装置包括用于所述骨调整的液压装置以控制由该装置施加到所述锚固装置上的力的量。
根据一个实施例,所述液压装置包括汽缸和活塞。
根据一个实施例,所述液压装置包括机械式多阶锁闭机构,用于在调整后将该液压装置锁定在其新位置处。
根据一个实施例,该机械式多阶锁闭机构包括短距件、采用锯齿、凸缘、倒钩或盖带原理的细长结构、螺母、变速箱或锁闭原理的受载弹簧中的至少一个。
根据一个实施例,所述液压装置包括液压流体和容纳该流体的贮液器,该液压装置适于将所述流体移至所述调整装置中。
根据一个实施例,通过利用预加压贮液器或泵将所述液压流体从所述贮液器移至所述调整装置中。
根据一个实施例,所述液压装置包括装置定位系统,例如流体体积或流量测量或者任何其它传感器输入,以查看该调整装置的位置。
根据可与本文中所提出的任何实施例自由组合的又一实施例,所述装置包括控制装置。
根据一个实施例,所述控制装置遵循在该装置植入之前制定的递增量的程序。
根据一个实施例,所述控制装置遵循在植入之后和/或在治疗期间传达至该控制装置的递增量的程序。
根据一个实施例,所述控制装置包括外部控制单元和适于与所述外部控制单元进行无线通信的植入式接收器,所述外部控制单元具有位于体外的发射器。
根据一个实施例,所述控制装置通过使用所述外部控制单元控制在植入之后和/或在治疗期间传达至所述接收器的所述调整装置的递增量。
根据一个实施例,所述液压调整装置适于在骨调整结束之后被固定。
根据一个实施例,所述液压调整装置可填充以用于固定该调整装置的位置并使所述锚固装置之间的距离保持不变的材料。
在上述实施例中,所述材料优选选自用于固化、交联或以其它方式达到并保持稳定体积的医用泡沫材料、医用凝胶、聚合物或聚合物混合物。
根据一个实施例,所述装置中所用的所述液压流体的材料选自用于在使用者开始治疗、固化、交联或其它反应时固化、交联或以其它方式达到并保持稳定体积的医用泡沫材料、医用凝胶、聚合物或聚合物混合物。
在上述实施例中,向所述装置添加从用于固化、交联或以其它方式达到并保持稳定体积的医用泡沫材料、医用凝胶、聚合物或聚合物混合物中选出的材料,以部分或者完全地替代液压流体。
根据一个实施例,所述调整装置包括用于所述骨调整的机械装置。
根据一个实施例,所述调整装置由诸如马达之类的操作装置操作。
根据另一实施例,所述装置包括控制装置,其中所述操作装置由所述控制装置控制。
根据另一实施例,所述马达包括马达或装置定位系统,例如转速计或任何其它传感器输入端,以查看该调整装置的位置。
根据另一实施例,用于所述骨调整的机械装置包括至少一个螺母和螺钉。
根据另一实施例,所述用于骨调整的机械装置包括至少一个变速箱。
根据另一实施例,所述用于骨调整的机械装置包括伺服机构或机械放大器。
根据另一实施例,所述装置适于施加间歇力和/或振荡力。
根据一个实施例,所述液压装置包括机械式多阶锁闭机构,用于在调整后将该液压装置锁定在其新位置处。
根据一个实施例,该机械式多阶锁闭机构包括短距件、采用锯齿、凸缘、倒钩或盖带原理的细长结构、螺母、变速箱或锁闭原理的受载弹簧中的至少一个。
本发明还涉及一种用于哺乳动物骨调整的方法,其中使用根据上述提出的任一液压装置或机械装置并将之植入在所述哺乳动物体内。
根据另一实施例,所述装置从骨髓内植入在所述哺乳动物体内,向锚固在所述骨中内部的锚固装置施加力。
根据另一实施例,所述骨调整是骨延长、骨折愈合、骨角改变、骨重塑或上述之组合。
根据另一实施例,所述调整是用于矫正由先天条件、畸形或先前创伤引起的肢体不等长的治疗中的一步。
根据另一实施例,所述调整是涉及牵引成骨治疗的骨重塑或延长。
根据另一实施例,所述调整是作为矫正先天畸形一个步骤的骨重塑或延长。
根据另一实施例,所述调整是作为美容治疗一个步骤的骨重塑或延长。
根据该方法的可与本文中提出的任一实施例自由结合的另一实施例,重整为改变骨的角度或曲度、改变骨扭矩、改变骨干与骨骺之间的角度、改变骨厚度或上述之结合中的一项。
根据另一实施例,一装置从骨髓内植入所述哺乳动物体内,其中所述装置为向锚固在所述骨中的锚固装置施加力的液压装置以及控制由该装置施加的力的量的控制装置。
根据另一实施例,一装置从骨髓内植入所述哺乳动物体内,其中所述装置为向锚固在所述骨中的锚固装置施加力的机械装置以及控制由该装置施加的力的量的控制装置。
根据该方法的可与本文中提出的任一实施例自由结合的另一实施例,所述控制装置遵循在该装置被植入之前即已制定的递增量的程序。作为替代,所述控制装置遵循在植入之后和/或在治疗期间传达该控制装置的递增量的程序。
根据该方法的可与本文中提出的任一实施例自由结合的另一实施例,该装置在治疗结束之后固定。
根据一个实施例,通过向该装置填充用以固定该调整装置的位置并使所述锚固装置之间的距离保持不变的材料来固定所述装置。优选地,所述材料选自用于固化、交联或以其它方式达到并保持稳定体积的医用泡沫材料、医用凝胶、聚合物或聚合物混合物。
根据另一实施例,所述装置为液压装置,且该液压流体的材料选自用于在使用者开始治疗、固化、交联或其它反应时固化、交联或以其它方式达到并保持稳定体积的医用泡沫材料、医用凝胶、聚合物或聚合物混合物。
根据另一实施例,所述装置为液压装置,且向所述装置添加从用于固化、交联或以其它方式达到并保持稳定体积的医用泡沫材料、医用凝胶、聚合物或聚合物混合物中选出的材料,以部分或者完全替代液压流体。
另一实施例包括一种用于牵引成骨的方法,其中使用植入式液压装置或机械装置使断骨经受间歇力和/或振荡力。
另一实施例是一种通过提供包括至少两个根据本文提出的任一实施例的锚固装置在内的用于骨调整的装置治疗哺乳动物患者骨功能异常的方法,该方法包括步骤:
i.在所述哺乳动物患者的腔内嵌入针状或管状器械;
ii.通过经所述针状或管状器械导入流体来为所述腔加压从而扩展所述腔;
iii.在所述腔中放入至少两个腹腔镜套管针;
iv.经所述腹腔镜套管针之一向所述腔中嵌入摄像机;
v.经所述至少两个腹腔镜套管针之一嵌入至少一个解剖工具;
vi.解剖功能异常骨的区域;
vii.将用于骨调整的装置和锚固装置放入所述骨的骨髓腔中;
viii.将所述锚固装置与所述骨接触地锚固;
ix.优选地分层闭合哺乳动物体;以及
x.在术后以非侵入方式调整所述骨。
另一实施例是一种通过提供包括至少两个根据本文提出的任一实施例的锚固装置的用于骨调整的装置治疗哺乳动物患者的骨功能异常的方法,包括步骤:
i.切开所述哺乳动物患者的皮肤;
ii.解剖功能异常骨的区域;
iii.将装置放入所述骨的骨髓腔中;
iv.将所述锚固装置与所述骨接触地锚固;
v.优选地分层闭合哺乳动物体;和
vi.在术后以非侵入方式调整所述骨。
根据上述任一实施例的方法优选包括取出所述器械的步骤。
根据上述任一实施例的方法优选包括使用缝线或者缝合钉闭合皮肤的步骤。
根据该方法的另一实施例,该解剖步骤包括解剖上肢或下肢的区域,而解剖上肢或下肢的区域包括解剖下述骨中至少之一的区域:锁骨、肩胛骨、肱骨、桡骨、尺骨、骨盆骨、股骨、胫骨、腓骨或跟骨。
根据该方法的另一实施例,该解剖步骤包括解剖上肢或下肢的区域,而解剖上肢或下肢的区域包括解剖以下关节中至少之一的区域:肩、肘、髋、膝、手和脚。
根据该方法的另一实施例,通过钻孔制作到该骨髓腔的开口。
本发明还涉及一种包括根据本文所提出的任一项实施例的装置的系统。
根据该系统的另一实施例,所述系统包括至少一个植入患者体内以手动及非侵入方式控制该器具的开关。
根据另一实施例,所述系统进一步包括具有可植入液压贮液器的液压装置,该液压装置以液压方式连接到该器具,其中该器具适于通过手动按压该液压贮液器进行非侵入式调节。
根据另一实施例,所述系统进一步包括用于以非侵入方式控制该器具的无线遥控器。
根据另一实施例,该无线遥控器包括至少一个外部信号发射器和/或接收器,进一步包括可植入患者体内用于接收由该外部信号发射器发射的信号或传输信号给外部信号接收器的内部信号接收器和/或发射器。
根据另一实施例,所述无线遥控器发射至少一个用于控制该器具的无线控制信号。
根据另一实施例,所述无线控制信号可包括调频信号、调幅信号或调相信号、或者上述信号的组合。
根据另一实施例,所述无线遥控器发射携带该控制信号的电磁载波信号。
根据另一实施例,所述系统进一步包括用无线能量对该器具的可植入耗能部件进行非侵入式激励的无线能量传输装置。
根据另一实施例,所述无线能量包括选自下述的波信号:声波信号、超声波信号、电磁波信号、红外光信号、可见光信号、紫外光信号、激光信号、微波信号、无线电波信号、X射线辐射信号和伽玛辐射信号。
根据另一实施例,所述无线能量包括下述之一:电场、磁场、组合电磁场。
根据另一实施例,所述控制信号包括下述之一:电场、磁场、组合电磁场。
根据另一实施例,所述信号包括模拟信号、数字信号或模拟信号和数字信号的组合。
根据另一实施例,所述系统进一步包括为该器具的可植入耗能部件供能的可植入内部能源。
根据另一实施例,所述系统进一步包括用于采用无线模式传输能量的外部能源,其中,采用无线模式传输的能量可蓄入该内部能量源。
根据另一实施例,所述系统进一步包括检测或测量与用以蓄入该内部能源的能量的传输有关的功能参数的传感器或测量装置,和用于将反馈信息从患者体内发送到患者体外的反馈装置,该反馈信息与该传感器检测的或该测量装置测量的功能参数相关。
根据另一实施例,所述系统进一步包括用于将反馈信息从患者体内发送到患者体外的反馈装置,该反馈信息与该患者的物理参数和/或与该器具相关的功能参数有关。
根据再一实施例,所述系统进一步包括传感器和/或测量装置以及响应于与由该传感器检测到的或由该测量装置测量到的患者物理参数、和/或由该传感器检测到的或该测量装置测量到的该器具相关功能参数有关的信息控制该器具的可植入内部控制单元。所述物理参数优选为压力或能动性运动。
根据再一实施例,所述系统进一步包括外部数据通信器和与外部数据通信器通信的可植入内部数据通信器,其中内部通信器反馈与该器具或患者有关的数据给外部数据通信器和/或外部数据通信器反馈数据给内部数据通信器。
根据再一实施例,所述系统进一步包括用于操作该器具的马达或泵。
根据再一实施例,所述系统进一步包括用于操作该器具的液压操作装置。
根据再一实施例,所述系统进一步包括用于操作该器具的操作装置,其中该操作装置包括设计用来降低该操作装置操作该器具所需力的伺服机构或机械放大器,取代该操作装置以更持久的方式作用、增加用于所确定的行为的时间。
根据另一实施例,所述系统进一步包括用于操作该器具的操作装置,其中,随着由能量传输装置传输无线能量,无线能量用来以其无线状态直接为操作装置供能以产生供该器具操作之用的动能。
根据另一实施例,所述系统进一步包括用于将该能量传输装置所传输的无线能量从第一形式转换为第二形式能量的能量转换装置。
根据一个实施例,随着该能量转换装置将该能量传输装置所传输的第一形式能量转换为第二形式能量,所述能量转换装置直接用第二形式能量为该器具的可植入耗能部件供能。
根据一个实施例,所述第二形式能量包括直流、脉动直流和交流中的至少一种。
根据另一实施例,所述系统进一步包括可植入蓄能器,其中第二形式能量至少部分用于蓄入该蓄能器中。
根据一个可与本文中提出的任一实施例自由组合的实施例,所述第一形式能量或第二形式能量包括磁能、动能、声能、化学能、辐射能、电磁能、光能、核能、热能、非磁能、非动能、非化学能、非声能、非核能以及非热能中的至少一个。
根据另一实施例,所述系统进一步包括可植入电子部件,所述可植入电子部件包括至少一个电压电平防护器和/或至少一个恒流防护器。
根据另一实施例,所述系统进一步包括用于控制从该能量传输装置的无线能量传输的控制装置以及用于接收所传输的无线能量的可植入内部能量接收器,此内部能量接收器连接到该器具的可植入耗能部件,以直接或间接地向该器具的可植入耗能部件供应所接收的能量,该系统进一步包括适于测定由该内部能量接收器所接收的能量与该器具的可植入耗能部件所用能量之间的能量平衡的测定装置,其中该控制装置基于由该测定装置测定的能量平衡,控制从该外部能量传输装置的无线能量传输。
根据一个实施例,所述测定装置适于检测能量平衡的变化,且该控制装置基于所检测的能量平衡变化控制无线能量传输。
根据另一实施例,所述测定装置适于检测由内部能量接收器接收的能量与该器具的可植入耗能部件所用能量之间的差值,且该控制装置基于所检测的能量差值控制无线能量传输。
根据另一实施例,该能量传输装置包括置于人体外部的线圈,该能量传输装置进一步包括置于人体内部的可植入能量接收器以及连接为向该外部线圈供以电脉冲以传输无线能量的电子电路,该电脉冲具有前沿和后沿,且该电子电路适于改变电脉冲的前沿与继起的后沿之间的第一时间间隔、和/或电脉冲的后沿与继起的前沿之间的第二时间间隔,以改变所传输无线能量的功率,接收所传输的无线能量的能量接收器具有变化的功率。
根据再一实施例,所述电子电路适于传送电脉冲以保持不变,除改变第一时间间隔和/或第二时间间隔之外。
根据另一实施例,该电子电路具有一时间常数,且适于仅在该第一时间常数范围之内改变第一时间间隔和第二时间间隔,以便在第一时间间隔和/或第二时间间隔的长度改变时,经线圈发射的功率随之改变。
根据另一实施例,所述系统进一步包括用于接收无线能量的可植入内部能量接收器,该能量接收器具有内部第一线圈和连接到该第一线圈的第一电子电路;和用于发射无线能量的外部能量发射器,该能量发射器具有外部第二线圈和连接到该第二线圈的第二电子电路,其中该能量发射器的外部第二线圈发射由能量接收器的第一线圈接收的无线能量,该系统进一步包括用于切换开闭内部第一线圈到第一电子电路的连接的电源开关,从而在该电源开关切换开闭内部第一线圈到第一电子电路的连接时,由外部能量发射器接收与第一线圈的充电相关的反馈信息(其形式为外部第二线圈的负载中的阻抗变化)。
根据另一实施例,所述系统进一步包括用于接收无线能量的可植入内部能量接收器和用于发射无线能量的外部能量发射器,该能量接收器具有内部第一线圈和连接到该第一线圈的第一电子电路,而该能量发射器具有外部第二线圈和连接到该第二线圈的第二电子电路,其中该能量发射器的外部第二线圈发射由能量接收器的第一线圈接收的无线能量,该系统进一步包括用于将第一线圈接收的能量数量作为反馈信息向外传递的反馈装置,且其中该第二电子电路包括用于接收反馈信息并将第二线圈的传输能量数量和与第一线圈中接收的能量数量有关的反馈信息进行比较以获取第一线圈和第二线圈之间的耦合因子的测定装置。
根据一个实施例,所传输能量可根据获取的耦合因子来调节。
根据另一实施例,所述外部第二线圈适于相对该内部第一线圈移动以确立使耦合因子最大化的第二线圈最佳位置。
根据另一实施例,所述外部第二线圈适于在耦合因子最大化之前标定所传输能量数量以获得该测定装置中的反馈信息。
根据另一实施例,所述机械装置包括机械式多阶锁闭机构,用于将调整后的机械装置锁定在其新位置处。
根据再一实施例,该机械式多阶锁闭机构包括短距件、采用锯齿、凸缘、倒钩或盖带原理的细长结构、螺母、变速箱或锁闭原理的受载弹簧中的至少一个。
根据一个实施例,所述液压调整装置适于在骨调整结束之后固定。
根据一个实施例,所述液压装置可被填充以用于固定该调整装置的位置并使所述锚固装置之间的距离保持不变的材料。
在上述实施例中,所述材料优选地选自用于固化、交联或以其它方式达到并保持固定体积的医用泡沫材料、医用凝胶、聚合物或聚合物混合物。
根据一个实施例,所述装置中所用的所述液压液的材料选自用于在使用者开始治疗、固化、交联或其它反应时固化、交联或以其它方式达到并保持固定体积的医用泡沫材料、医用凝胶、聚合物或聚合物混合物。
在上述实施例中,向所述装置添加从用于固化、交联或以其它方式达到并保持固定体积的医用泡沫材料、医用凝胶、聚合物或聚合物混合物中选出的材料,以部分或者全部替代该液压液。
根据另一实施例,所述装置包括控制装置。所述控制装置优选遵循在该装置被植入之前即已制定的递增量的程序。作为替代,所述控制装置遵循在植入之后和/或在治疗期间传达至该控制装置的递增量的程序。
根据一个实施例,所述控制装置包括外部控制单元和适于与所述外部控制单元进行无线通信的可植入接收器,所述外部控制单元具有位于体外的发射器。
根据另一实施例,所述控制装置通过使用所述外部控制单元控制植入之后和/或治疗期间送达该接收器的调整装置递增量。
根据可与本文所提出的任何其它实施例自由组合的另一实施例,所述调整装置适于调整骨扭矩。
根据另一实施例,所述调整装置适于改变骨角。
根据另一实施例,所述调整装置包括至少包括两个部件,其中这两个部件适于相对彼此旋转。
根据另一实施例,所述相对旋转由所述至少两个锚固装置进行锚固。
根据另一实施例,所述调整装置包括至少两个部件,其中这两个部件适于彼此成一角度。
根据另一实施例,所述调整装置适于改变骨(包括脊柱)的曲度。
根据另一实施例,所述调整装置适于关节或脊椎重组或重定位,关节或脊椎重组或重定位包括脊柱形状重整或支撑。
根据另一实施例,两个或更多个锚固装置适于完全在该骨的外部接合并承载重量。
根据该装置的另一实施例,所述两个或更多个锚固装置适于以不穿透至该骨内部,即该骨的骨髓,的方式与该骨接合并承载重量。
根据另一实施例,所述调整装置适于置于该骨外部。
根据再一实施例,所述装置包括直接或者间接检测该调整装置的位置的传感器。
根据另一实施例,该装置包括适于将直接或者间接从所述传感器接收到的信息从人体发射出的反馈发射器,所述发射的信息适于由外部控制单元接收并与该调整装置的位置相关。
根据一个实施例,所述操作装置是以三相马达方式运转的马达。作为替代,所述操作装置是以两相或更多相马达的方式运转的马达。
根据再一实施例,所述装置包括连接到该马达的变速箱,即马达箱,其中该马达箱的输出速度低于所述马达本身的速度,这是由所述变速箱实现的。
根据再一实施例,由所述电子速度控制器降低所述马达箱中的马达的所述输出速度。
根据一个实施例,所述马达为旋转马达且该马达箱的输出速度降至低于每秒100转,或降至低于每秒10转,或降至低于每秒1转,或降至低于每秒0.1转,或降至低于每秒0.01转,或降至低于每秒0.001转。
根据另一实施例,所述装置包括连接到该马达的电子速度控制器,即马达箱,其中由所述电子速度控制器控制所述马达箱的马达的输出速度。
根据一个实施例,所述马达为线性马达且该马达箱的输出速度低于每秒1毫米,或低于每秒0.1毫米,或低于每秒0.01毫米,或低于每秒0.001毫米,或低于每秒0.0001毫米,或低于每秒0.00001毫米。
附图说明
将参照附图在接下来的说明书、范例和权利要求书中详细公开本发明,在附图中:
图1(现有技术)显示了根据U.S.5156605的髓内装置或内部自动牵引器,其经骨骺中的开口A嵌入股骨的骨髓内腔中。该装置通过一对位于该组件顶端的联锁螺母B以及一对会穿过该组件底端的联锁螺栓C进行锚固并固定到该股骨上。
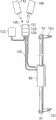
图2(现有技术)显示了根据EP 432 253B1(亦公布为WO 91/00065)的髓内销或“骨髓钉”,其具有固定孔E和D,以及用于旋转该杆使其靠内部分发生纵向位移的机械、气动、液压、电子或电磁驱动器。
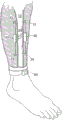
图3(现有技术)示意性显示了一个经常被称为伊里扎洛夫器具类型的外固定器(1),其包括两个环(2、3),这两个环(2、3)具有附连到患者小腿(5)中的胫骨或腓骨上并固定患者小腿(5)中的胫骨或腓骨的销(4)。固定器(1)的环(2、3)间的距离可通过手动旋转用于连接这些环的支柱上的螺纹筒(6、7、8)来调整。
图4显示了本发明一个实施例,其中骨上设置两套植入式装置。
图5显示了根据本发明一个实施例用于骨调整的装置的详图。
图6示意性显示了这些发明的一个实施例植入在骨的骨髓腔内的装置。
图7a和7b显示了根据本发明实施例的装置的详图。
图8a-图8c在图8a中详细显示了人体脊椎即脊柱(500)的示意性侧视图,并在局部图8b和8c中显示了如何应用根据本发明的实施例的装置。
图9a和9b显示了骨拉直,或者如何使用根据本发明的实施例的装置来调整骨的曲度。
图9c和9d显示了如何利用根据本发明的实施例的骨髓内装置来调整骨(这里是股骨)。
图9e和9f显示了可如何使用骨髓内装置来调整骨(该图中显示为股骨)的扭矩。
图10a和10b显示了根据本发明的实施例的两套装置的示意性详图,所述装置包括机械式多阶闭锁装置。
图11示意性显示了根据本发明一个实施例的骨调整系统,在详细说明部分对该骨调整系统有更详尽的说明。
图12a-12d示意性显示了嵌入根据本发明一个实施例的柔性装置。
图13a-13e显示了根据本发明实施例的紧固工具或锚固装置的端部的结构的各种非限制性示例。
图14-28示意性显示了用于为器具无线供能的系统的各种实施例,这些实施例以图4、11、12和图38所示为例但不限于这些图所示。
图29是显示了供应用以操作图11中显示的器具的精确数量能量的机构的示意性框图。
图30示意性显示了该系统的一个实施例,在该实施例中,该器具利用导线结合能来操作。
图31是一种用于控制用以操作图11中所示器具所用无线能量之传输的机构的较详细框图。
图32显示了根据可能的实施方式示例用于图27中所示机构的电路图。
图33显示了根据本发明一个实施例的锚固装置。
图34显示了根据本发明另一实施例的锚固装置。
图35显示了该装置的实施例,包括两个伸缩设置的部件,这两个部件容纳纵向螺纹中心杠或轴以及在纵向螺纹中心杠或轴上作用将旋转力转换为纵向力以及该装置之延伸或收缩的马达或变速机构。
图36显示了一相关实施例,其中该装置包括三个主要部件,即中间部分以及两个伸缩设置的端部,这两个伸缩设置的端部各自通过马达或变速机构连接到纵向螺纹中心杠或轴。
图37显示了多个实施例,其中根据本发明用于骨调整的装置封入柔性、弹性或可扩展外壳中。
图38显示了根据本发明的一个植入式装置,其中锚固装置从该骨髓腔的内部接合该骨。
图39示意性显示了包括马达、变速箱和速度控制器的装置的一个实施例。
图40示意性显示了一个实施例,其中该植入式调整装置包括至少两个部件,这两个部件适于定位成彼此成一角度和/或相对彼此旋转。
具体实施方式
在描述本发明之前,必须了解:本文中采用的术语仅出于描述具体实施例之目的,而非意在限制,这是因为本发明的范围将仅由所附权利要求书及其等同来限定。
须指出的是,在本申请文件以及所附权利要求书中,若非上下文中另行明确指出,所用单数形式的“一”和“该”皆包括复数对象在内。
此外,如采用术语“约”,则表示偏差为给定值+/-2%,优选为+/-5%,最优选情况下为数值的+/-10%。
术语“动物”涵盖所有的哺乳动物,特别是人类。同样,术语“治疗”、“疗法”和“治疗用药”涵盖人类及动物或兽医用途。
术语“牵伸装置”包括任何能够纵向运动的装置,特别是在能够在两点或更多点之间沿纵向施加作用力的装置。牵伸装置可以是液压装置、电子装置、机械装置或上述装置中两个或更多个装置的组合。
术语“液压装置”包括任何由作用于该装置中元件上的液压流体传递引致纵向作用力的能量的装置。这些元件的例子包括但不限于液压缸、液压充气管、气缸、波纹管及类似元件。
术语“植入式”表示将装置或装置的元件永久性或暂时性导入到人体或动物体内。植入式装置可以整体也可以只是部分地容纳于人体或动物体内,举例来说借助于经所述人或者动物皮肤中的开口或其它接口通达。植入式装置可以整体封入在人体或动物体内,与用于发射和接收信号(例如发射测量数据和接收控制信号)并接收能量的外部器具进行无线通信。
本发明涉及一种用于哺乳动物骨调整的可植入装置,包括至少一个适于与所述骨相关地植入的细长装置,其中所述用于骨调整的装置进一步包括用于调整所述至少一个细长装置的至少一个骨相关机械参数的调整装置,其中所述调整装置被构造为在术后调整所述骨相关机械参数,并且其中所述用于骨调整的可植入装置适于采用无线方式直接或间接供能,并适于接收从外部源以非侵入性方式传输的无线能量以便由所述调整装置调整所述至少一个骨相关机械参数。
在根据本发明实施例的装置中,所述骨相关机械参数涉及骨延长、骨缩短、骨折愈合、骨角改变、骨旋转、骨曲度或扭矩调整、骨重塑、关节或脊椎重组或重定位、脊柱形状重整或支撑或上述之组合。
根据另一实施例,所述骨相关机械参数包括下述至少一个:使界定骨折的至少两块骨部分在一段时间彼此靠近在愈合过程的初始阶段具有益影响,并使界定骨折的所述至少两块骨部分在一段时间彼此远离在愈合过程的骨形成中具有益影响。
根据本发明的再一实施例,两个或更多个锚固装置适于从骨外部接合骨。
这一情况示意性地绘制在图4中,该图显示了具有断裂区(20)的断裂胫骨(10),其由根据本发明的两套装置(40,50)支撑,这两套装置皆附连到锚固装置(31,32,33,34)上,所述锚固装置(31,32,33,34)附连到骨。
图5显示了牵伸装置的详细视图,牵伸装置在该图中显示为具有两个致动器(91,92)的液压装置(80),这两个致动器(91,92)附连到两个适于嵌入骨中的锚固装置(101,102),锚固装置(101,102)可以是传统的销或螺钉。液压装置通过一管(110)与供应加压的液压流体的液压动力单元(120)流体接触,液压动力单元(120)接下来与控制单元(130)连通。可选地,所述控制元件亦向液压动力单元提供能量。液压动力单元可包括贮液器和泵或采水样器类型的预加压扩张贮液器或任何其它液压解决方案。控制单元、能源、贮液器、泵或马达皆可单独植入或者以任意组合形式一起植入。
动力单元120可进一步连接到或包括与容纳液体的贮液器122相关的液压泵121,液压泵121用于调节该装置80的压力。因此,该泵适于向装置80中泵入液压流体或从装置80中泵出液压流体,以调整该装置中的压力和致动器91、92的位置。
动力单元120还可包括可由发送无线能量的外部供电/充电单元112从外部充电的可再充电电池123。
调整可由适于从位于治疗中的患者体外的发送器/接收器106接收和发送信号的电子遥控单元124来控制。
该液压装置优选包括装置定位系统(例如液量或流量测量或者任何其它传感器输入)以查看该调整装置的位置。优选设置感应伸长率的传感器(例如电容传感器或阻抗传感器)或者任何感应运动或特定位置的传感器,这里标识为125,即与控制单元124通信的传感器。
或者,示意图图5也可代之以显示为机械装置80。在这种情况下,绘制为110的机械线路适于操作所述机械装置。动力单元120在这种情况下则可代之以包括马达121、伺服器123以及之前的控制单元124和传感器125。可再充电电源可代之以由单元122来标识。当然,马达可以直接放置在机械单元80中,其中机械线路110由电线来取代。
图6示出了本发明的一个实施例,其中骨(200)中植入一套装置,该骨具有两个端部或者骨骺(201,202)和断裂区(206),所述断裂区也构成生长区或延长区。骨髓腔(204)示意性以局部剖视的方式显示,在该腔中设置装置(210),该装置(210)具有作用于骨髓腔的端部的致动器或锚固工具(212,214),从而通过在断裂区或延长区(206)成骨以实现骨延长。
根据本发明不同实施例的装置210的详图显示在图7a和图7b中。
图7a示意性显示了牵伸元件或者装置(300)的实施例,牵伸元件或者装置(300)包括带有电动马达(302)的外壳(301),电动马达(302)作用于与两个致动器(304,305)接合的螺纹缸(303)。可采用任何机械解决方案。该马达优选采用伺服机构以大幅降低作用力。控制单元、能源、马达或伺服机构皆可单独植入或以任意组合的形式一起植入。
图7b示意性显示了牵伸元件或装置(400)的另一实施例,包括具有两个活塞(402,403)的外壳(401),这两个活塞(402,403)连接到两个致动器(404,405)。活塞与外壳及其它可能的附加元件一起形成液压装置,该液压装置经管(406)连接到液压动力单元(未显示)。
根据本发明的装置也可应用于脊柱弯曲调整。图8a-图8c示出了根据本发明的装置应用于脊柱弯曲调整的一个实施例。详图(a)是下背部椎骨(腰椎)的后侧视图,示意性地显示了根据本发明附连到脊柱两侧的两套装置(501,504)。出于展示目的,一套装置(501)显示为通过锚固在椎体中的两套锚固装置(502,503)附连到两块相邻的椎骨上,而另一装置(504)则显示为通过两套锚固装置(505,506)附连到两块不相邻的椎骨上。详图(b)是一幅侧视图,示意性显示了根据本发明通过锚固装置(511,512,521,522)附连到脊柱两侧的两套装置(510,520)。出于展示目的,一套装置作用于相邻的椎骨上而另一套装置作用于不相邻的椎骨上。该实施例可用于调整脊柱曲度以减轻腰椎间盘突出等。
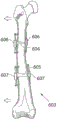
根据另一实施例,由调整装置施加的作用力为纵向作用力,调整骨角度或曲度。这一情况展示在示意性显示了右股骨(600)的正视图的图9a中,该右股骨(600)出现了弯曲偏离其天然形状的症状。弯曲可能是先天性疾病或其它情况造成的。虚线(601,602)指示了该骨可如何断裂,优选采用锯切。举一个例子,切除楔形部分并将该骨分割成几个部分,附图9a中显示为三个部分。图9b显示了股骨(603)的这三个部分如何重新定位到所需方向(即直骨)。断裂区(604,605)随后用作生长区以补偿因骨切除导致的长度减小。随后,根据本发明的装置(606,607)通过致动器和锚固装置附连到这些部分,确保它们的位置并施加力以实现通过牵引成骨延长。这些箭头示意性显示了该骨各部分可相对彼此调整,例如,通过调整所述各部分的角度或方向。
根据另一实施例,两个或更多个锚固装置适于接合该骨的皮质部分。
根据另一实施例,所述两个或更多个锚固装置适于从骨髓内腔内部接合该骨。
根据另一实施例,所述至少两个锚固装置从销、螺钉、胶、倒钩结构、锯齿结构、扩张元件及其组合或其它机械连接组件中选取。
根据再一实施例,由该调整装置施加的力是延长该骨长度的纵向力。
根据一个实施例,所述由该调整装置施加的力指向骨髓腔的端部。
根据一个实施例,所述由该调整装置施加的力是纵向力,调整该骨的角度或曲度。
根据一个实施例,所述由该装置施加的力应用扭力至该骨,调整该骨沿其纵轴的扭矩。
图9c和图9d中示出了一个相关的实施例,其中畸形骨600在两个位置601和602处切断,各切口皆优选为楔形以便矫直该骨,且根据本发明的装置610和620嵌入到骨髓腔中。与图9b所示类似,这些箭头示意性显示了该骨的各部分可相对彼此调整,例如,通过调整所述各部分的角度或方向。
根据又一实施例,由该装置施加的力应用扭力于该骨,调整该骨沿其纵轴的扭矩。该实施例显示在图9e和图9f中,其中骨600沿虚线630切断并可选沿一条或多条线(以631为例)切断。根据本发明的一个或更多个可植入装置640和650嵌入到骨髓腔中。这些箭头指示了该骨的一个或几个部分可调整,例如,相对关节旋转或者相对该骨的一部分旋转。
根据可与本文中所提出的任何实施例自由组合的又一实施例,所述装置为柔性的以便导入该骨髓腔中。
根据一个实施例,所述装置至少部分为弹性的。
根据一个实施例,所述装置包括弹簧。
根据一个实施例,所述装置在已被弯曲之后恢复其形状。
根据可与本文中所提出的任何实施例自由组合的又一实施例,所述锚固装置适于可在被植入哺乳动物体内时由所述调整装置调整以便相对该骨接合并固定该锚固装置。
根据一个实施例,该锚固装置包括用于使所述锚固装置相对该骨接合并相对该骨固定的螺纹。
根据另一实施例,该锚固装置包括至少部分垂直于该细长装置的纵向延伸部扩展以便相对该骨接合并固定该锚固装置的可扩展部分。
根据另一实施例,该调整装置包括用于所述骨调整的液压装置以控制由该装置施加到所述锚固装置上的力的量。
根据一个实施例,所述液压装置包括汽缸和活塞。
柔性装置的优点展示于图12a-12d中,这些图示意性地示出了具有断裂区I的骨200。由外科医生制备开口II以便将装置III嵌入到骨髓内腔IV中。图12b示出了根据本发明一个实施例的装置III柔性如何,以及如何使得可能通过一个并非沿笔直纵向牵伸至骨髓内腔的开口将所述装置导入该腔。此外,图12c示出了装置III当在腔IV中就位时如何保持其原有形状以及如何纵向扩展以朝该腔的端部施加作用力。锚固装置起作用并牢固地接合周围的骨头。开口II优选为封闭的,例如采用骨水泥。最后,图12d示出了装置III连接到动力单元V的一个实施例,该动力单元V可具有图5所示动力单元120的部件和功能。
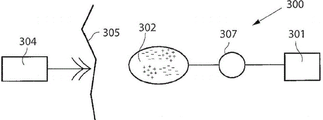
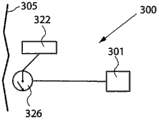
图11示出了一种治疗疾病的系统,包括根据本发明一个实施例放置于患者小腿中的器具301。植入式能量转换装置302适于通过供能线303向该器具的耗能部件供能。以非侵入性方式为器具301供能的外部能量传输装置304通过至少一个无线能量信号传输能量。植入式能量转换装置302将来自所述无线能量信号的能量转换成通过供能线303供应的电能。示出了另一外部装置305,其示意性显示了一个能够向器具301发送控制信号并可选地能够接收由器具301发送的信号的装置,由器具301发送的信号举例来说如涉及由该器具中包括的一个或更多个传感器(未示出)记录的位置、能量水平、牵张力、压力、温度信息或其它相关信息。
所述无线能量信号可包括选自下述的波信号:声波信号、超声波信号、电磁波信号、红外光信号、可见光信号、紫外光信号、激光信号、微波信号、无线电波信号、X射线辐射信号和伽玛辐射信号。此外,该无线能量信号可包括电场或磁场或组合电磁场。
无线能量传输装置304可发送携带无线能量信号的载波信号。此种载波信号可包括数字信号、模拟信号或数字信号与模拟信号的组合。在这种情况下,该无线能量信号包括模拟信号或数字信号或者模拟信号与数字信号的组合。
一般来说,能量转换装置302用来将能量传输装置304传输的第一形式无线能量转换为通常不同于第一形式能量的第二形式能量。植入式器具301可响应于第二形式能量工作。随着能量转换装置302将能量传输装置304传输的第一形式能量转换为第二形式能量,能量转换装置302可直接以第二形式能量驱动该器具。该系统还可包括可植入蓄能器,其中第二形式能量至少部分用于蓄入该蓄能器。
作为替代,随着由能量传输装置304传输无线能量,由能量传输装置304传输的无线能量可用来直接驱动该器具。凡该系统包括用于操作该器具的操作装置的情况,正如下文中将描述的那样,由能量传输装置304传输的无线能量就可用来直接驱动该操作装置以产生操作该装置所需动能。
第一形式无线能量可包括声波,而能量转换装置302可包括将此声波转换为电能的压电元件。第二形式能量可包括直流形式、或脉动直流形式、或直流与脉动直流结合形式、或交流形式、或直流与交流结合形式的电能。通常情况下,该器具包括由电能激励的电子元件。该系统的其它可植入电子元件可以是与该器具的所述电子元件连接的至少一个电压电平防护器或者至少一个恒流防护器。
可选地,第一形式能量和第二形式能量之一可包括磁能、动能、声能、化学能、辐射能、电磁能、光能、核能或热能。优选地,第一形式能量和第二形式能量之一为非磁性的、非动力的、非化学的、非声的、非核的或非热的。
能量传输装置可从患者体外控制以释放电磁无线能量,而所释放的电磁无线能量用来操作该器具。作为替代,可从患者体外控制能量传输装置以释放非磁性无线能量,而所释放的非磁性无线能量用来操作该器具。
外部能量传输装置304还包括:具有用于发射无线控制信号的外部信号发射器从而以非侵入方式控制该器具的无线遥控器。该控制信号由植入式信号接收器接收,该植入式信号接收器可集成在植入式能量转换装置302中,或者独立于植入式能量转换装置302。
无线控制信号可包括调频信号、调幅信号或调相信号、或者上述信号的组合。作为替代,无线控制信号包括模拟信号或数字信号或者模拟信号与数字信号的组合。作为替代,无线控制信号包括电场、磁场或组合电磁场。
无线遥控器可发射携带无线控制信号的载波信号。此种载波信号可包括数字信号、模拟信号或数字信号与模拟信号的组合。凡控制信号包括模拟信号、或数字信号或模拟信号与数字信号的组合的情况,无线遥控器皆优选发射携带数字控制信号或模拟控制信号的电磁载波信号。
图14以更概括性的框图方式示出了以图4、图6、图12a-图12d或图38所示为例的系统,该图中显示了植入的器具301、通过供能线303为器具301供能的能量转换装置302以及外部能量传输装置304。患者皮肤305通常用垂直线显示,其将线右侧的患者体内与线左侧的体外分隔开。
图15显示了本发明一个与图14相同(除了在患者体内另外植入用于使器具301反转的反向装置之外,该反向装置采用举例来说可利用极化能量操作的电开关306形式)的实施例。当该开关利用极化能量操作时,外部能量传输装置304的无线遥控器发射携带极化能量的无线信号,而植入的能量转换装置302将此无线极化能量转换为用于操作电开关306的极化电流。当该电流的极性被植入的能量转换装置302切换时,电开关306转换器具301执行的功能。
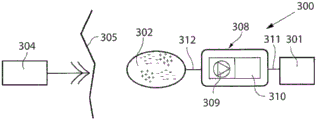
图16显示了本发明一个与图14相同(除了在植入式能量转换装置302与器具301之间设置植入患者体内用以操作器具301的操作装置307之外)的实施例。此操作装置可采用马达307的形式,例如电子伺服马达。随着外部能量传输装置304的遥控器向植入式能量转换装置302发送无线信号,马达307被供以来自植入式能量转换装置302的能量。
图17显示了本发明一个与图14相同(除了还包括植入患者体内的操作装置之外,该操作装置采用包括马达/泵单元309和贮液器310的组件308形式)的实施例。在这种情况下,器具301采用液压方式操作,即,由马达/泵单元309从贮液器310泵取液压流体经管道311到器具301以操作该器具,且马达/泵单元309将液压流体从器具301泵回到贮液器310中以使该器具返回到起始位置。植入式能量转换装置302将无线能量转换为电流(例如极化电流)用以通过电力供能线312为马达/泵单元309供电。
也可想见,操作装置可包括气动操作装置,以取代液压操作装置301。在这种情况下,液压流体可以是待用以调节的压缩空气,而贮液器被气室所取代。
在所有这些实施例中,能量转换装置302可包含有如电池或电容器这样待蓄入无线能量并为系统的耗能部件供能的可再充电蓄能器。
作为替代,上文所述无线遥控器可代之以任何植入式部件的使患者的手最有可能间接接触到的手动控制器,比如置于皮肤下的按钮。
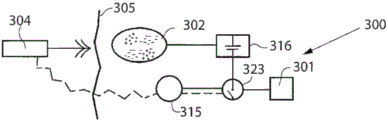
图18显示了本发明一个实施例,该实施例包括具有其无线遥控器的外部能量传输装置304、(在这种情况下采用液压方式操作)器具301、以及植入式能量转换装置302,并进一步包括液压流体贮液器313、马达/泵单元309和采用液压阀切换装置314形式的反向装置,它们皆植入患者体内。当然,由于仅通过改变泵取方向即可轻松地执行液压操作,故而可省略液压阀。遥控器可以独立于外部能量传输装置,也可包括于外部能量传输装置中。马达/泵单元309的马达是电动马达。响应于来自外部能量传输装置304的无线遥控器的控制信号,植入式能量转换装置302利用由控制信号携带的能量为马达/泵单元309供应能量,以便马达/泵单元309在液压液贮液器313和器具301这二者之间分配液压流体。外部能量传输装置304的遥控器控制液压阀切换装置314,以便在两个方向之间切换液压流体流动方向,其中一个方向为由马达/泵单元319将液体从液压流体贮液器313泵取到器具301以操作该器具的方向,另一相反方向为由马达/泵单元309将液体从器具301泵回液压流体贮液器313以使该器件返回到起始位置的方向。
图19显示了本发明的一个实施例,该实施例包括具有其无线遥控器的外部能量传送设备304、器具301、植入式能量转换装置302、由外部能量传输装置304的无线遥控器控制的植入式内部控制单元315、植入式蓄能器316和植入式电容器317。内部控制单元315安排将从植入式能量转换装置302接收的电能存储在蓄能器316中,由蓄能器316将能量供应给器具301。响应于来自外部能量传输装置304的无线遥控器的控制信号,内部控制单元315或者从蓄能器316释放电能并经输电线318和319传输释放的能量,或者从植入式能量传输装置302经输电线320、作稳定电流之用的电容器317、输电线321和输电线319直接传输电能以操作器具301。
内部控制单元优选为可从患者体外编程。在优选实施例中,内部控制单元被编程为根据预先编制的时间表,或者根据来自感知患者的任何可能的物理参数或者系统的任何功能参数的任何传感器的输入来调节器具301。
根据一种替代方案,可省略图19的实施例中的电容器317。根据另一种替代方案,可省略该实施例中的蓄能器316。
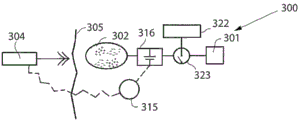
图20显示了本发明一个与图14的实施例相同(除了在患者体内另外植入用于供应用以操作器具301的能量的电池322和用于切换器具301的操作的电开关323之外)的实施例。电开关323可由遥控器控制,并且还利用由植入式能量转换装置302供应的能量操作为从电池不处使用中的关闭模式切换到电池322供能供操作器具301之用的开启模式。
图21显示了本发明一个与图20的实施例相同(除了在患者体内另外植入可由外部能量传输装置304的无线遥控器控制的内部控制单元315之外)的实施例。在这种情况下,电开关323可利用植入式能量转换装置302供应的能量操作为从关闭模式切换到待机模式,在关闭模式下,无线遥控器无法控制内部控制单元315且电池不处使用中,而在待机模式下,允许遥控器控制内部控制单元315从电池322释放电能供操作器具301之用。
图22显示了本发明一个与图21的实施例相同(除了用蓄能器316取代电池322且植入式部件之互连方式有别之外)的实施例。在这种情况下,蓄能器316存储来自植入式能量转换装置302的能量。响应于来自外部能量传输装置304的无线遥控器的控制信号,内部控制单元315控制电开关323从蓄能器316不处使用中的关闭模式切换到蓄能器316供应能量供操作器具301之用的开启模式。蓄能器可与电容器相结合,也可为电容器所代替。
图23显示了本发明一个与图22的实施例相同(除了患者体内另外植入电池322且植入式部件之互连方式有别之外)的实施例。响应于来自外部能量传输装置304的无线遥控器的控制信号,内部控制单元315控制蓄能器316输送用于操作电开关323的能量,从电池322不处使用中的关闭模式切换到电池322供应电能供操作器具301之用的开启模式。
作为替代,电开关323可利用蓄能器316供应的能量操作,从关闭模式切换到待机模式,在关闭模式下,无线遥控器无法控制电池322供应电能且电池不处使用中,而在待机模式下,允许无线遥控器控制电池322供应电能供操作器具301之用。
应理解,本申请中的开关323及所有其它开关都应以其最宽泛的实施方式来解释。这意味着晶体管、MCU、MCPU、ASIC、FPGA或DA转换器或任何其它可切换电源开闭的电子元件或电路。此开关优选为可从体外控制,或者,作为替代由植入式内部控制单元控制。
根据一个实施例,所述调整装置包括用于所述骨调整的机械装置。
根据一个实施例,所述调整装置由诸如马达之类的操作装置操作。
根据另一实施例,所述装置包括控制装置,其中所述操作装置由所述控制装置控制。
根据另一实施例,所述马达包括马达或装置定位系统(例如转速计或任何其它传感器输入端)以查看该调整装置的位置。
根据另一实施例,用于所述骨调整的机械装置包括至少一个螺母和螺钉。
根据另一实施例,所述用于骨调整的机械装置包括至少一个变速箱。
根据另一实施例,所述用于骨调整的机械装置包括伺服机构或机械放大器。
根据另一实施例,所述装置适于施加间歇力和/或振荡力。
图24显示了本发明一个与图20的实施例相同(除了在患者体内另外植入马达307、采用变速箱324形式的机械反向装置和用于控制变速箱324的内部控制单元315之外)的实施例。内部控制单元315控制变速箱324使器具301所执行的功能反转(机械式操作)。更简单的方式是采用电子方式切换马达方向。按其最宽泛的实施方式解释的变速箱,可表示一种在作用冲程较长的情况下降低此操作装置的作用力的伺服机构。
这一情况亦示出在图39中,图39示意性显示了根据本发明一个实施例的装置,其中可植入装置2000包括以可操作方式连接到变速箱2020及调整装置2030的马达2010,其中马达2010的速度和/或效果由控制单元2040控制。
根据一个实施例,所述控制单元2040既可感应马达2010的速度又可调整其速度,并可选地检测驱动调整装置2030的变速箱2020的输出速度。根据另一实施例,所述控制单元2040包括反馈环路,其检测马达的速度并将之调整到所需值。在另一实施例中,不存在变速箱,控制单元2040既检测马达的速度又调整其速度。
图25显示了本发明一个与图23的实施例(除了植入式部件之互连方式有别之外)相同的实施例。相应地,在这种情况下,当蓄能器316(在合适的情况下为电容器)触发电开关323切换到开启模式时,内部控制单元315由电池322供电。当电开关323处于其开启模式时,允许内部控制单元315控制电池322供应或者不供应供操作器具301之用的能量。
图26示意性显示了用于实现各种不同通信选择方案的器具的植入式部件的可能组合。基本上,具备器具301、内部控制单元315、马达或泵单元309以及包括外部无线遥控器的外部能量传输装置304。正如上文已经描述的那样,无线遥控器发送的控制信号由内部控制单元315接收,而内部控制单元315接下来控制该器具的各种植入式部件。
反馈装置优选包括传感器或测量装置325,其可植入患者体内检测患者的物理参数。物理参数可以是从下组中选出的至少一种参数,该组由压力、体积、直径、伸缩率、伸长率、伸展率、移动、弯曲度、弹性、肌肉收缩、神经冲动、体温、血压、血流量、心跳和呼吸构成。该传感器可检测上述任何物理参数。例如,该传感器可以是压力传感器或运动传感器。作为替代,该传感器325可设置为检测功能参数。功能参数可以与用以蓄入植入式能源的能量的传输有关,并可进一步包括从下组中选择的至少一种参数,该组由电力、压力、体积、直径、伸缩率、伸长率、伸展率、移动、弯曲度、弹性,温度和流量构成。
这些反馈信息可发送至内部控制单元,或者向外(优选经内部控制单元)发送至外部控制单元。反馈信息可从体内经能量传输系统或具备接收器与发射器的独立通信系统向外发送。
内部控制单元315(或者,作为替代的外部能量传输装置304的外部无线遥控器),可响应于来自传感器325的信号来控制器具301。收发器可与传感器325组合向外部无线遥控器发送所检测的物理参数信息。无线遥控器可包括信号发射器或收发器,而内部控制单元315可包括信号接收器或收发器。作为替代,无线遥控器可包括信号接收器或收发器,而内部控制单元315可包括信号发射器或收发器。上述收发器、发射器和接收器可用于将与器具301相关的信息或数据从患者体内发送至患者体外。
凡植入了马达/泵单元309和为马达/泵单元309供电的电池322的情况,则皆可反馈与电池322充电有关的信息。为更精确起见,当为电池或蓄能器蓄能时,发送与所述蓄能过程有关的反馈信息并相应地改变能量供应。
图27显示了一种作为替代的实施例,其中从患者体外调节器具301。该系统300包括经皮下电开关326连接到器具301的电池322。相应地,通过手动按压皮下开关借以开启和关闭器具301的操作即可实现以非侵入方式调节该器具301。应理解,所示出的实施例作了一些简化,事实上诸如内部控制单元或在本申请文件中公开的任何其它配件之类的附加部件皆可添加至该系统中。也可采用两个皮下开关。在优选实施例中,一个植入式开关发送信息到内部控制单元以执行某项预定性能,当患者再次按下开关时,则性能反转。
图28显示了一个作为替代的实施例,其中系统300包括以液压方式连接到该器具的液压流体贮液器313。通过手动按压连接到该器具的液压贮液器执行非侵入式调节。
该系统可包括外部数据通信器和与外部数据通信器通信的可植入内部数据通信器。内部通信器反馈与该器具或患者有关的数据给外部数据通信器和/或外部数据通信器反馈数据给内部数据通信器。
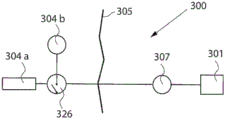
图29示意性显示了这样一种系统配置,其能够从患者体内向体外发送信息以给出与该器具或系统的至少一项功能参数有关或者与患者的物理参数有关的反馈信息,从而向与该器具301的植入式耗能部件连接的植入式内部能量接收器302供应数量精确的能量。此种能量接收器302可包括能源和/或能量转换装置。简而言之,无线能量从位于患者体外的外部能源304a发射出并为位于患者体内的内部能量接收器302所接收。该内部能量接收器适于直接或间接向器具301的耗能部件供应所接收的能量。在内部能量接收器302所接收的能量与该器具301所用的能量之间测定能量平衡,随后基于所测定的能量平衡来控制无线能量传输。因此,能量平衡提供了对所需准确数量能量的精确标识,其能够恰当地操作该器具301,又不致使温度过度升高。
在图29中,患者的皮肤由垂直线305来标出。在这里,能量接收器包括位于患者体内的能量转换装置302,优选刚好位于患者皮肤305下方。一般而言,植入式能量转换装置302可皮下埋置于腹、胸、肌肉筋膜中(例如在腹壁中)或任何其它合适的位置处。植入式能量转换装置302适于接收设置在外部能量传输装置304中的外部能源304a所发射的无线能量E,外部能量传输装置304位于患者皮肤305外部靠近植入式能量转换装置302处。
正如本领域中周知的那样,无线能量E通常借助任何合适的经皮能量传输(TET)装置来传输,此种装置举例来说包括设置在外部能源304a中的初级线圈和设置在植入式能量传输装置302中的毗邻的次级线圈。当通过初级线圈供给电流时,在次级线圈中感生出电压形式的能量,感生的能量可(举例来说,在将接收到的能量存储于诸如可再充电电池或电容器之类的植入式电源之后)用来为该器具的耗能部件供电。然而,本发明一般不局限于任何特定的能源传输技术、TET装置或者能源,且可采用任何类型的无线能量。
由植入式接收器接收的能量数量可与该器具的植入式部件所用能量进行比较。因此,所谓“所用能量”理解为还包括该器具的植入式部件所存储的能量。控制装置包括基于所测定的能量平衡来控制外部能源304a以调节所传输能量数量的外部控制单元304b。为传输准确数量的能量,借助包括连接到该器具301的植入式内部控制单元315的测定装置来测定能量平衡与所需能量数量。因此,内部控制单元315可设置为接收由适当的传感器或类似器件(未显示,其测量该器具301的某些特性)获取的各种测量值,这些测量值以某种方式反映恰当操作该器具301所需的能量数量。此外,患者的当前状况亦可借助适当的测量装置或传感器来检测以提供反映患者状况的参数。因此,这些特性和/或参数可与器具301的当前状态(例如功耗、操作模式和温度以及由诸如体温、血压、心跳和呼吸之类的参数所反映的患者状况)相关。患者的其它类型物理参数和装置的其它类型功能参数记载于本文它处。
此外,可选择将蓄能器316形式的能源连接到用于蓄积所接收的能量供器具301后续使用的植入式能量转换装置302。作为替代或者作为补充,这种蓄能器的特性(亦反映了所需能量数量)亦可测量。蓄能器可代之以可再充电电池,所测量的特性可与电池的当前状态、诸如耗能电压之类的电参数、温度等相关。很明显,为了向器具301提供充足的电压和电流并避免过热,应通过从植入式能量转换装置302接收准确数量的能量,即,既不太少又不太多的能量,实现以最优方式充电。该蓄能器也可为具有相应特性的电容器。
例如,电池特性可定期测量以测定电池的当前状态,测定的电池当前状态随后可在内部控制单元315中的适当存储工具中存储为状态信息。如此一来,每当做出新的测量结果时,所存储的电池状态信息即可相应更新。这样,电池的状态可通过传输准确数量的能量得以“标定”从而使电池保持在最佳状态。
因此,测定装置的内部控制单元315适于基于上述传感器或测量装置对器具301、或患者、或植入式能源(若采用的话)或上述三者的组合所作出的测量结果,测定能量平衡和/或当前所需能量数量(每时间单位的能量或蓄积能量)。内部控制单元315进一步连接到内部信号发射器327,该内部信号发射器327设置为向连接到外部控制单元304b的外部信号接收器304c发射反映测定的所需能量数量的控制信号。而后可响应于所接收的控制信号调节从外部能源304a发射的能量数量。
作为替代,测定装置可包括外部控制单元304b。在该替代方案中,传感器测量结果可直接发射到外部控制单元304b中,由外部控制单元304b测定能量平衡和/或当前所需能量数量,从而将内部控制单元315的上述功能集成在外部控制单元304b中。在这种情况下,可省略内部控制单元315并将传感器测量结果直接提供给内部信号发射器327,由内部信号发射器327将之发送给外部信号接收器304c和外部控制单元304b。随后可由外部控制单元304b基于此传感器测量结果测定能量平衡和当前所需能量数量。
因此,根据图25的设置的本方案利用了表示所需能量的信息的反馈,由于该方案是以与所接收能量进行了比较的实际能量使用(例如,就与该器具的植入式耗能部件所用能率进行了比较的能量数量、能量差、或能量接收率)为依据的,故而其较之此前方案来说更为高效。所接收的能量,可供该器具消耗或者将之存储在植入式能源等中。因此,如若相关或有需求的话,会采用上文讨论的不同参数,并将之作为用于测定实际能量平衡的工具。然而,这些参数也可能是内部所进行的用以具体操作该器具的任何行为本身所需要的。
内部信号发射器327和外部信号接收器304c可用采用适当的信号传输手段(例如无线电信号、红外信号或超声波信号)的独立单元来实现。作为替代,内部信号发射器327和外部信号接收器304c可分别集成在植入式能量转换装置302和外部能源304a中,以便(大体上采用相同的传输技术)沿与能量传输相反的方向传递控制信号。可就频率、相位或振幅对这些控制信号进行调制。
因此,反馈信息可由包括接收器和发射器在内的独立通信系统来传输,或者可集成在能量系统中。根据本发明,此种集成式的信息反馈与能量系统包括:用于接收无线能量的植入式内部能量接收器,该能量接收器具有内部第一线圈和连接到该第一线圈的第一电子电路;和用于发射无线能量的外部能量发射器,该能量发射器具有外部第二线圈和连接到该第二线圈的第二电子电路。能量发射器的外部第二线圈发射由能量接收器的第一线圈接收的无线能量。该系统进一步包括用于切换开闭内部第一线圈到第一电子电路的连接的电源开关,从而在该电源开关切换开闭内部第一线圈到第一电子电路的连接时,由外部能量发射器接收与第一线圈的充电相关的反馈信息(其形式为外部第二线圈的负载中的阻抗变化)。在图29的配置中实现该系统时,开关326或者是独立的但由内部控制单元315来控制,或者集成在内部控制单元315中。应该理解的是,开关326应按照其最宽泛的实施方式来解释。这意味着,晶体管、MCU、MCPU、ASIC FPGA或DA转换器或任何其它可切换电源开闭的电子部件或电路。
总括而言,图29所示能源配置基本上可按下述方式来操作。首先由测定装置的内部控制单元315来测定能量平衡。反映所需能量数量的控制信号亦由内部控制单元315创建,此控制信号从内部信号发射器327发射到外部信号接收器304c。作为替代,能量平衡可由外部控制单元304b测定而非依赖于如上文所述的实施方案。在这种情况下,控制信号可携带来自各种传感器的测量结果。随后,可由外部控制单元304b(举例来说,响应于所接收的控制信号)基于所测定的能量平衡调节外部能源304a发射的能量数量。这个过程可能会在能量传输进行过程中以特定间隔间歇性地重复,或者可在能量传输过程中大致连续地执行。
所传输能量数量总体上通过调整外部能源304a中的各种传输参数(例如电压、电流、振幅、波频率和脉冲特性)来调节。
该系统也可用来获取与TET系统中的线圈之间的耦合因子相关的信息,甚至可用来将系统校正成既为外部线圈寻找相对内部线圈的最佳位置又优化能量传输。简单比较在这种情况下的传输能量数量与接收能量数量。举例来说,若外部线圈移动则耦合因子可能会有变化,而正确显示的运动可能会促使外部线圈寻找到用于能量传输的最佳位置。优选情况下,外部线圈适于在耦合因子最大化之前校正传输能量数量以获得测定装置中的反馈信息。
这些耦合因子信息还可用作能量传输过程的反馈信息。在这种情况下,本发明的能量系统包括用于接收无线能量的植入式内部能量接收器和外部能量发射器,该能量接收器具有内部第一线圈和连接到该第一线圈的第一电子电路,而该能量发射器具有外部第二线圈和连接到该第二线圈的第二电子电路。能量发射器的外部第二线圈发射由能量接收器的第一线圈接收的无线能量。该系统进一步包括用于将第一线圈接收的能量数量作为反馈信息向外传递的反馈装置,其中该第二电子电路包括用于接收反馈信息并将第二线圈的传输能量数量和与第一线圈中接收的能量数量有关的反馈信息进行比较以获取第一线圈和第二线圈之间的耦合因子的测定装置。可依据所获取的耦合因子调节所传输的能量。
参照图30,尽管已在上文中介绍了用无线能量传输来操作该器具以实现非侵入性操作,但是要认识到,该器具可利用导线结合能来操作。图30中就显示了这样一则示例,其中外部开关326连接于外部能量源304a和诸如电动马达307之类用以操作器具301的操作装置之间。外部控制单元304b控制外部开关326的操作以实现器具301的正常操作。
图31显示了所接收的能量可如何提供给器具301并为其所用的不同实施例。类似于图29的例子,内部能量接收器302接收来自于由传输控制单元304b控制的外部能量源304a的无线能量E。内部能量接收器302可包括在图中用虚线框“恒定V”表示的恒压电路,其用于以恒定电压向器具301供应能量。内部能量接收器302可进一步包括在图中用虚线框“恒定C”表示的恒流电路,其用于以恒定电流为器具301供应能量。
该器具301包括耗能配件301a,其可以是马达、泵、节流装置或任何其它需要能量用于其电操作的医疗器械。该器具301可进一步包括用于存储从内部能量接收器302供应的能量的能量存储装置301b。因此,所供应的能量可由耗能配件301a直接消耗或者由能量存储装置301b存储,或者,所供应的能量可部分用于消耗部分用于存储。该器具301可进一步包括用于稳定从内部能量接收器302供应的能量的能量稳定单元301c。相应地,可采用波动的方式供能,也就需要在消耗或者存储能量之前对其加以稳定。
从内部能量接收器302供应的能量可进一步在由器具301消耗和/或存储之前,由位于器具301外部的独立能量稳定单元328进行蓄积和/或稳定处理。作为替代,能量稳定单元328可集成在内部能量接收器302中。在任何一种情况下,能量稳定单元328皆可包括恒压电路和/或恒流电路。
应指出的是,图29和图31显示了某些涉及各种所示功能部件和元件可如何设置以及相互连接的可能的但并非限制性的实施方式选择方案。然而,技术人员应理解,可在本发明的范围之内作出各种变化与修改。
图32示意性显示了用以控制无线能量传输的系统(或者说,能量平衡控制系统)的建议设计之一的能量平衡测量电路。该电路具有以2.5V为中心并与能量失衡按比例相关的输出信号。这个信号的导数表示该值是否有升降以及这种变化以多快的速度进行。如果接收的能量数量低于植入物所用能量,则传输更多的能量并相应地蓄入能源之中。来自电路的输出信号通常被供应给A/D转换器并被转换成数字格式。数字信息随后可发送到外部能量传输装置供其调整所传输能量的水平。另一种可能是具备全模拟系统,该全模拟系统使用比较器来比较能量平衡水平与特定最大或最小阈值,并在平衡偏移出最大/最小窗口时向外部能量传输装置发送信息。
电路原理图图32显示了一种用于利用感应能量传输将能量从患者体外传输到本发明的器具的植入式能量部件的系统的电路实现方案。感应能量传输系统通常使用外部发射线圈和内部接收线圈。接收线圈,L1,包含在该电路示意图中;而该系统的发射部分则被排除在外。
当然,能量平衡的常规概念的实现方式以及信息传输到外部能量发射器的方式可用若干种不同方式来实现。电路原理图图28及上文所述评估和发射信息的方法只应看作如何实现该控制系统的示例。
电路详述
在图32中,符号Y1、Y2、Y3等象征电路中的测试点。图中的部件及其各自的值皆为此特定实施方式下的值,其当然仅为无穷多种可能设计方案之一例而已。
供给此电路的能量由能量接收线圈L1接收。在此特定情况下,供给植入式部件的能量以25千赫的频率传输。测试点Y1处存在能量平衡输出信号。
本领域技术人员会意识到,系统的上述各种实施例可按不同方式组合。例如,图11中的电开关可集成到图14-20的任一实施例中,液压阀切换装置314可集成到本发明的另一实施例中,而变速箱324则可集成到再一实施例中。
请注意,此开关仅能表示任何电子电路或部件。
结合图29、31和32描述的实施例明确了一种用于控制向电力可操作器具的耗能部件传输无线能量的方法和系统。下文中将对此方法和系统进行概括性的限定。
因此,提供一种如上文所述控制为器具的植入式耗能部件供应的无线能量之传输的方法。无线能量E从位于患者体外的外部能源发射出并为位于患者体内的内部能量接收器所接收,此内部能量接收器连接到该器具的植入式耗能部件以直接或间接地向该器具的耗能部件供应所接收的能量。测定内部能量接收器所接收的能量与该器具所用能量之间的能量平衡。随后根据所测定的能量平衡,控制从外部能量源的无线能量E发射。
无线能量可采用感应方式从外部能源中的初级线圈传输到内部能量接收器中的次级线圈。可检测能量平衡的变化,从而基于所检测的能量平衡变化来控制无线能量传输。还可检测内部能量接收器所接收的能量与医疗装置所用能量之差,从而基于所检测到的能量差控制无线能量传输。
在控制能量传输之时,若所检测的能量平衡变化表示能量平衡渐增,则降低所无线能量传输量,反之亦然。能量传输的降低/提高可进一步与所检测的变化率相对应。
若所检测的能量差表示接收能量大于所用能量,则可进一步降低无线能量的传输量,反之亦然。相应地,能量传输的降低/提高可与所检测的能量差的量级相对应。
如上所述,医疗装置所用能量可供操作该医疗装置之消耗和/或供存储于该医疗装置的至少一个储能装置中。
在测定该医疗装置的电子和/或物理参数和/或患者的物理参数时,可根据以所述参数为基础测定出的每单位时间传输率传输用于消耗和存储的能量。还可基于所述参数测定能量总传输量。
在检测到由内部能量接收器接收到的总能量和所消耗和/或储存的总能量之差、且所检测的差与至少一项与所述能量平衡相关的所测电参数的时间积分有关时,可就所监控的与能量平衡有关的电压和/或电流确定该积分。
在确定与所消耗和/或存储的总能量能量数量有关的所测电参数的时间导数时,可就所监控的与能量平衡有关的电压和/或电流确定该导数。
从外部能量源传输无线能量可采用下列方式控制:从第一电子电路向该外部能源施加电脉冲以发射无线能量,该电脉冲具有前沿和后沿;改变电脉冲的前沿与继起的后沿之间的第一时间间隔的长度和/或电脉冲的后沿与继起的前沿之间的第二时间间隔的长度;及发射无线能量,由电脉冲产生的发射能量的功率可变,功率的改变取决于第一时间间隔和/或第二时间间隔的长度。
这种情况下,在第一时间间隔和/或第二时间间隔改变时,电脉冲的频率可大体上恒定。当施加电脉冲时,电脉冲可保持不变(除第一时间间隔和/或第二时间间隔改变之外)。在第一时间间隔和/或第二时间间隔改变时,电脉冲的幅值可大体上恒定。此外,可通过仅改变电脉冲的前沿和继起的后沿之间的第一时间间隔的长度来改变电脉冲。
可以成串地供应一列两个或更多个电脉冲,其中在施加该脉冲列时,该列具有位于该脉冲列始端的第一电脉冲和位于该脉冲列末端的第二电脉冲,可成串地供应两列或更多列脉冲列,其中第一脉冲列的第二电脉冲的后沿和继起的第二脉冲列的第一电脉冲的前沿之间的第二时间间隔的长度是变化的。
在施加电脉冲时,电脉冲可具有大体上恒定的电流和大体上恒定的电压。电脉冲也可具有大体上恒定的电流和大体上恒定的电压。此外,电脉冲还可具有大体上恒定的频率。脉冲列中的电脉冲可同样具有大体上恒定的频率。
由第一电子电路和外部能源形成的电路可具有第一特性时间段或者第一时间常数,且在有效地改变传输能量时,此频率时间段可在第一特性时间段或时间常数的范围之内或者更短。
因此,包括上文所述器具的系统还用于控制为该器具的植入式耗能部件供应的无线能量之传输。就其最宽泛的意义而言,该系统包括用于控制从能量传输装置的无线能量传输的控制装置以及用于接收所传输的无线能量的植入式内部能量接收器,此内部能量接收器连接到该器具的开植入耗能部件以直接或间接地向该器具的耗能部件供应所接收的能量。该系统进一步包括适于测定由该内部能量接收器所接收的能量与该器具的植入式耗能部件所用能量之间的能量平衡的测定装置,其中该控制装置基于由该测定装置测定的能量平衡,控制从该外部能量传输装置的无线能量传输。
此外,该系统可包括下列任一项:
-该外部能源中适于以感应方式将无线能量传输给该内部能量接收器中的次级线圈的初级线圈。
-该测定装置适于检测能量平衡的变化,且该控制装置基于所检测的能量平衡变化控制无线能量传输。
-该测定装置适于检测由内部能量接收器接收的能量与该器具的可植入耗能部件所用能量之间的差值,且该控制装置基于所检测的能量差值控制无线能量传输。
-若所检测的能量平衡变化表示能量平衡渐增,则控制装置控制外部能量传输装置降低所无线能量传输量,反之亦然,其中能量传输的降低/提高与所检测的变化率相对应。
-若所检测的能量差值表示接收能量大于所用能量,则该控制装置控制该外部能量传输装置降低无线能量传输量,反之亦然,其中,能量传输的降低/提高与所检测的能量差值的量级相对应。
-该器具所用能量供操作该器具之消耗和/或供存储于该器具的至少一个储能装置中。
-在测定该器具的电子和/或物理参数和/或患者的物理参数的情况下,该能量传输装置根据由该测定装置以所述参数为基础测定出的每单位时间传输率传输用于消耗和存储的能量。该测定装置还基于所述参数测定能量总传输量。
-在检测到由内部能量接收器接收到的总能量和所消耗和/或储存的总能量之差、且所检测的差与至少一项与所述能量平衡相关的所测电参数的时间积分有关时,测定装置就所监控的与能量平衡有关的电压和/或电流确定该积分。
-在确定与所消耗和/或存储的能量数量有关的所测电参数的时间导数时,该测定装置就所监控的与能量平衡有关的电压和/或电流确定该导数。
-该能量传输装置包括置于人体外部的线圈和向该外部线圈供以电脉冲以传输无线能量的电子电路。该电脉冲具有前沿和后沿,且该电子电路适于改变电脉冲的前沿与继起的后沿之间的第一时间间隔和/或电脉冲的后沿与继起的前沿之间的第二时间间隔以改变所传输无线能量的功率。其结果是接收所传输的无线能量的能量接收器的功率是变化的。
-该电子电路适于令电脉冲保持不变,除改变第一时间间隔和/或第二时间间隔之外。
-该电子电路具有一时间常数,且适于仅在该第一时间常数范围之内改变第一时间间隔和第二时间间隔,以便在第一时间间隔和/或第二时间间隔的长度改变时,经线圈发射的功率随之改变。
-该电子电路适于仅通过改变电脉冲的前沿与继起的后沿之间的第一时间间隔的长度即令电脉冲发生变化。
-该电子电路适于成串供应一列两个或更多个电脉冲,该列具有位于该脉冲列始端的第一电脉冲和位于该脉冲列末端的第二电脉冲,且
-该第一电子电路改变第一脉冲列的第二电脉冲的后沿和与之连续的第二脉冲列的第一电脉冲的前沿之间的第二时间间隔的长度。
-该电子电路适于将所述电脉冲设置为具有大体上恒定的高度和/或幅值和/或强度和/或电压和/或电流和/或频率的脉冲。
-该电子电路具有一时间常数,且适于仅在该第一时间常数范围之内改变第一时间间隔和第二时间间隔,以便在第一时间间隔和/或第二时间间隔的长度改变时,经第一线圈发射的功率随之改变。
-该电子电路适于将电脉冲配置为令第一时间间隔和/或第二时间间隔的长度仅在一包括该第一时间常数或者相比该第一时间常数的量级来说位于相对靠近该第一时间常数处的范围之内变化。
根据一个实施例,所述无线能量信号包括选自下述的波信号:声波信号、超声波信号、电磁波信号、红外光信号、可见光信号、紫外光信号、激光信号、微波信号、无线电波信号、X射线辐射信号和伽玛辐射信号。
根据一个实施例,所述无线能量包括下述之一:电场、磁场、组合电磁场。
根据一个实施例,所述控制信号包括下述之一:电场、磁场、组合电磁场。
根据另一实施例,所述信号包括模拟信号、数字信号、或模拟信号与数字信号的组合。
根据再一实施例,所述系统进一步包括为该器具的植入式耗能部件供能的可植入内部能量源。
根据再一实施例,所述系统进一步包括以无线模式传输能量的外部能源,其中以无线模式传输的能量可蓄入该内部能源。
根据再一实施例,所述系统进一步包括检测或测量与用以蓄入该内部能源的能量的传输有关的功能参数的传感器或测量装置和用于将反馈信息从患者体内发送到患者体外的反馈装置,该反馈信息与该传感器检测的或者该测量装置测量的功能参数有关。
根据再一实施例,所述系统进一步包括用于将反馈信息从患者体内发送到患者体外的反馈装置,该反馈信息与该患者的物理参数和/或与该器具相关的功能参数有关。
根据再一实施例,所述系统进一步包括传感器和/或测量装置以及响应于与由该传感器检测到的或由该测量装置测量到的患者物理参数和/或由该传感器检测到的或该测量装置测量到的该器具相关功能参数有关的信息控制该器具的可植入内部控制单元。
根据另一实施例,所述物理参数是压力或能动性运动。
根据再一实施例,所述系统进一步包括外部数据通信器和与外部数据通信器通信的可植入内部数据通信器,其中内部通信器反馈与该器具或患者有关的数据给外部数据通信器和/或外部数据通信器反馈数据给内部数据通信器。
根据再一实施例,所述系统进一步包括用于操作该器具的马达或泵。
根据再一实施例,所述系统进一步包括用于操作该器具的液压操作装置。
根据再一实施例,所述系统进一步包括用于操作该器具的操作装置,其中该操作装置包括设计用来降低该操作装置操作该器具所需力的伺服机构,取代该操作装置以更持久的方式(增加用于所确定的行为的时间)起作用。
根据另一实施例,所述系统进一步包括用于操作该器具的操作装置,其中,随着由能量传输装置传输无线能量,无线能量以其无线状态直接为操作装置供能以产生供该器具操作的动能。
根据再一实施例,所述系统进一步包括用于将该能量传输装置所传输的无线能量从第一形式转换为第二形式能量的能量转换装置。
根据一个实施例,随着该能量转换装置将该能量传输装置所传输的第一形式能量转换为第二形式能量,所述能量转换装置直接用第二形式能量为该器具的可植入耗能部件供能。
根据一个实施例,所述第二形式能量包括直流、脉动直流和交流中的至少一种。
根据再一实施例,所述系统进一步包括可植入蓄能器,其中第二形式能量至少部分用于蓄入该蓄能器中。
根据一个实施例,所述第一形式能量或第二形式能量包括磁能、动能、声能、化学能、辐射能、电磁能、光能、核能、热能、非磁性能、非动力能、非化学能、非声能、非核能或非热能中的至少一种。
根据再一实施例,所述系统进一步包括可植入电子部件,所述可植入电子部件包括至少一个电压电平防护器和/或至少一个恒流防护器。
根据再一实施例,所述系统进一步包括用于控制从该能量传输装置的无线能量传输的控制装置以及用于接收所传输的无线能量的可植入内部能量接收器,此内部能量接收器连接到该器具的可植入耗能部件以直接或间接地向该器具的耗能部件供应所接收的能量。该系统进一步包括适于测定由该内部能量接收器所接收的能量与该器具的可植入耗能部件所用能量之间的能量平衡的测定装置,其中该控制装置基于由该测定装置测定的能量平衡,控制从该外部能量传输装置的无线能量传输。
根据一个实施例,所述测定装置适于检测能量平衡的变化,且该控制装置基于所检测的能量平衡变化控制无线能量传输。
根据另一实施例,该测定装置适于检测由内部能量接收器接收的能量与该器具的可植入耗能部件所用能量之间的差值,且该控制装置基于所检测的能量差值控制无线能量的传输。
根据另一实施例,该能量传输装置包括置于人体外部的线圈,该能量传输装置进一步包括置于人体内部的可植入能量接收器以及连接为向该外部线圈供以电脉冲以传输无线能量的电子电路,该电脉冲具有前沿和后沿,且该电子电路适于改变电脉冲的前沿与继起的后沿之间的第一时间间隔、和/或电脉冲的后沿与继起的前沿之间的第二时间间隔以改变所传输无线能量的功率,接收所传输的无线能量的能量接收器的功率是变化的。
根据再一实施例,该电子电路适于令电脉冲保持不变,除改变第一时间间隔和/或第二时间间隔之外。
根据另一实施例,该电子电路具有一时间常数,且适于仅在该第一时间常数范围之内改变第一时间间隔和第二时间间隔,以便在第一时间间隔和/或第二时间间隔的长度改变时,经线圈发射的功率随之改变。
根据另一实施例,该系统包括用于接收无线能量的可植入内部能量接收器,该能量接收器具有内部第一线圈和连接到该第一线圈的第一电子电路;和用于发射无线能量的外部能量发射器,该能量发射器具有外部第二线圈和连接到该第二线圈的第二电子电路,其中该能量发射器的外部第二线圈发射由能量接收器的第一线圈接收的无线能量,该系统进一步包括用于切换开闭内部第一线圈到第一电子电路的连接的电源开关,从而在该电源开关切换开闭内部第一线圈到第一电子电路的连接时,由外部能量发射器接收与第一线圈的充电相关的反馈信息(其形式为外部第二线圈的负载中的阻抗变化)。
根据另一实施例,该系统包括用于接收无线能量的可植入内部能量接收器和用于发射无线能量的外部能量发射器,该能量接收器具有内部第一线圈和连接到该第一线圈的第一电子电路,而该能量发射器具有外部第二线圈和连接到该第二线圈的第二电子电路,其中该能量发射器的外部第二线圈发射由能量接收器的第一线圈接收的无线能量,该系统进一步包括用于将第一线圈接收的能量数量作为反馈信息向外传递的反馈装置,其中该第二电子电路包括用于接收反馈信息并将第二线圈的传输能量数量和与第一线圈中接收的能量数量有关的反馈信息进行比较以获取第一线圈和第二线圈之间的耦合因子的测定装置。
根据一个实施例,所传输能量可根据获取的耦合因子来调节。
根据另一实施例,所述外部第二线圈适于相对该内部第一线圈移动以确立使耦合因子最大化的第二线圈最佳位置。
根据另一实施例,所述外部第二线圈适于在耦合因子最大化之前标定所传输能量数量以获得该测定装置中的反馈信息。
根据再一实施例,所述机械装置包括机械式多阶锁闭机构,用于将调整后的机械装置锁定在其新位置处。图10a和图10b中展示了一则实例,其中图10a示意性显示了根据本发明的装置(700)的详图,所述装置包括至少一个液压活塞(701)和两个致动器(702、703)。在该实施例中,一个致动器附连到该装置的外壳,而另一致动器为活动的。为防止致动器(举例来说,在暂时性经受增大的压力时)返回至先前位置,该外壳具有一孔(705)且该致动器具有允许其向外运动且基本上不允许其向内运动的锥形凸缘(704)。
图10b显示了一个替代性实施例,其中在根据本发明的装置(800)中,在外壳中设置两个活塞(801、802)。这些活塞连接到两个致动器(805、806),这两个致动器依次与锚固装置(未示出)接合。所述外壳的内部具有突起、带或倒钩的图案,允许所述活塞沿一个方向(优选向外)运动且基本上不允许其向内运动。
根据再一实施例,该机械式多阶锁闭机构包括短距件、采用锯齿、凸缘、倒钩或盖带原理的细长结构、螺母、变速箱或锁闭原理的受载弹簧中的至少一个。
根据该系统的另一实施例,该装置包括控制装置。
根据另一实施例,所述控制装置遵循在该装置被植入之前即已制定的递增量的程序。
根据另一实施例,所述控制装置遵循在植入之后和/或在治疗期间传达至该控制装置的递增量的程序。
根据另一实施例,所述控制装置包括外部控制单元和适于与所述外部控制单元进行无线通信的植入式接收器,所述外部控制单元具有位于体外的发射器。
根据另一实施例,所述控制装置控制通过使用所述外部控制单元控制在植入之后和/或在治疗期间传达至所述接收器的所述调整装置的递增量。
根据一优选实施例,所述装置为柔性的以便导入骨髓腔中。作为替代或者作为补充,所述装置至少部分为弹性的。作为替代或者作为补充,所述装置包括弹簧。作为替代或者作为补充,所述装置适于在已被弯曲之后恢复其形状。
根据可与本文中所提出的其它实施例自由组合的另一实施例,所述锚固装置包括用于使所述锚固装置相对该骨接合并相对该骨固定的螺纹。
根据另一实施例,该锚固装置包括至少部分垂直于该细长装置的纵向延伸部扩展以便使所述锚固装置与该骨接合并相对该骨固定的可扩展部分。该实施例显示在图33中,图33示意性显示了具有两个端部或者说锚固工具902和903的装置900,所述锚固工具902和903举例来说为弹性的可扩展工具,此弹性的可扩展工具在该图中显示为可用锁销或旋钮901从外部启动,该锁销或旋钮901具有可插入到装置900中的部分,并且与触发该锚固装置902和903尤其扩展该锚固装置902和903的机构接合。
视图I、II和III依次显示了:处于初始非扩展状态的锚固工具902和903如何能够插入到腔中;锚固工具902和903如何被触发和扩展;以及,锚固工具902和903在扩展时如何与周围的腔接合并如何能够操作该装置进行骨调整。
根据示意性显示在图34中的一则替代性实施例,装置920包括凸缘922和923形式的锚固工具。在该图中显示为具有能够与用于触发922和923的机构接合的端部的线921,与该装置以可操作的方式接触,该锚固装置被触发。在被触发时,该锚固装置与周围的腔接合并允许操作该装置进行骨调整。
图38显示了具有断裂区1021的骨1020的局部剖视图,且根据本发明一个实施例的可植入装置植入在该骨髓腔1040中,所述装置包括主体1030和两个锚固装置1050和1051。入口1022显示为举例来说利用骨水泥密封或封闭,且该调整装置显示为处于伸延和操作状态,其中该锚固装置1050和1051与该骨牢固地接合。
根据另一实施例,所述调整装置适于包括骨扭矩。作为替代或者作为补充,所述调整装置适于改变骨角。
根据另一实施例,所述调整装置包括至少两部件,其中这两部件适于相对彼此旋转。优选地,所述相对旋转由所述至少两个锚固装置进行锚固。
根据可与本文中提出的其它实施例自由组合的另一实施例,所述调整装置适于改变骨角。
根据可与本文中提出的其它实施例自由组合的另一实施例,所述调整装置包括至少两个部件,其中这两部件适于定位成彼此成一角度。
这一情况示意性显示在图40中,图40显示了该植入式调整装置包括至少两个部件2100和2200,这两部件适于定位成彼此成一角度和/或相对彼此旋转。通过设置关节可实现此项运动,关节在图中显示为附连到操作装置2260的半圆形或半球形元件2250,操作装置2260适于相对部件2200转动或旋转元件2250。该元件2250亦以可操作方法接合到部件2100,其中调整装置2150适于接合所述元件,以改变部件2100和部件2200之间的角度。优选地,所述操作装置2260和所述调整装置2260各自皆包括马达,且可选地还包括变速箱及控制单元,正如在本文中其它实施例的上下文中所记载的那样。
箭头示意性指出了图40中所示部件的可能运动方向,但是应理解,这些部件可按照需要相对彼此成一角度、倾斜或旋转。
根据另一实施例,所述两个或更多个锚固装置适于完全在该骨的内部接合并承载重量。
根据再一实施例,所述两个或更多个锚固装置适于以不穿透至该骨外部的方式与该骨接合并承载重量。
根据再一实施例,所述两个或更多个锚固装置适于完全在该骨的外部接合并承载重量。
根据可与本文中所提出的任何实施例自由组合的另一实施例,所述装置包括直接或者间接检测该调整装置的位置的传感器。
根据另一实施例,该装置包括适于将直接或者间接从所述传感器接收到的信息从人体发射出的反馈发射器,所述发射信息适于由外部控制单元接收并与该调整装置的位置相关。
根据该装置的另一实施例,所述操作装置是以三相马达方式运转的马达。作为替代,所述操作装置是以两相或更多相马达的方式运转的马达。
根据可与本文中提出的任何实施例自由组合的另一实施例,所述装置包括连接到该马达的变速箱,即马达箱,其中该马达箱的输出速度低于所述马达本身的速度,这是由所述变速箱实现的。
根据可与本文中提出的任何实施例自由组合的另一实施例,所述装置包括连接到该马达的电子速度控制器,即马达箱,其中由所述电子速度控制器降低所述马达箱中马达的输出速度。
根据上述任一实施例,该马达为旋转马达且该马达箱的输出速度降至低于每秒100转,作为替代降至低于每秒10转,作为替代降至低于每秒1转,或者作为替代降至低于每秒0.1转,或者作为替代降至低于每秒0.01转,或者作为替代降至低于每秒0.001转。
根据可与本文中提出的任何实施例自由组合的另一实施例,所述装置包括连接到该马达的电子速度控制器,即马达箱,其中由所述电子速度控制器控制所述马达箱的马达的输出速度。
根据上述任一实施例,该马达为线性马达且该马达箱的输出速度低于每秒1毫米,作为替代低于每秒0.1毫米,或者作为替代低于每秒0.01毫米,或者作为替代低于每秒0.001毫米,或者作为替代低于每秒0.0001毫米,或者低于每秒0.00001毫米。
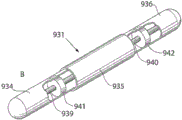
根据本发明的装置的结构亦显示在图35中,该图示意性显示了装置930的一个实施例,包括两个伸缩设置的部件932和933,这两个部件容纳纵向螺纹中心杠或轴937以及在纵向螺纹中心杠或轴937上作用将旋转力转换为纵向力以及该装置之延伸或收缩的马达或变速机构938。
此外,图36显示了另一相关实施例,其中该装置包括三个主要部件,即中间部分935以及两个伸缩设置的端部934和936,这两个伸缩设置的端部934和936各自通过马达或变速机构941连接到纵向螺纹中心杠或轴939和940。
最后,图37显示了根据本发明的骨调整装置(示意性显示为1000和1010)封入柔性或弹性外壳1001或可扩展外壳1011中的实施例,其中举例来说可借助褶1012实现扩展以避免所述保护该装置的壳与组织和体液直接接触。
所述弹性、柔性或者可扩展壳优选由通常被认为安全且允许医用的聚合物材料制成,并可适当涂覆以减少组织发炎。此种材料的非限制的例子包括硅、聚亚安酯和 适用涂料的非限制性例子包括粉化金属涂层及
适用涂料的非限制性例子包括粉化金属涂层及 之类的聚合物涂层。
之类的聚合物涂层。
本发明还涉及一种用于哺乳动物骨调整的方法,其中使用根据上述提出的任一实施例的液压装置或机械装置并将之植入所述哺乳动物体内。
根据另一实施例,所述装置从骨髓内植入哺乳动物体内,向锚固在所述骨内部的锚固装置施加作用力。
根据另一实施例,所述骨调整是骨延长、骨折愈合、骨角改变、骨重塑或上述之组合。
根据另一实施例,所述调整是用于矫正由先天条件、畸形或先前创伤引起的肢体不等长的治疗中的一步。
根据另一实施例,所述调整是涉及牵引成骨治疗的骨重塑或延长。
根据另一实施例,所述调整是作为矫正先天畸形一个步骤的骨重塑或延长。
根据另一实施例,所述调整是作为美容治疗一个步骤的骨重塑或延长。
根据该方法的可与本文中提出的任一实施例自由结合的另一实施例,重整为改变骨的角度或曲度、改变骨扭矩、改变骨干与骨骺之间的角度、改变骨厚度或上述之结合中的一项。
根据另一实施例,一装置从骨髓内植入所述哺乳动物体内,其中所述装置为向锚固在所述骨内部的锚固装置施加力的液压装置以及控制由该装置施加的力的量的控制装置。
根据另一实施例,一装置从骨髓内植入所述哺乳动物体内,其中所述装置为向锚固在所述骨内的锚固装置施加力的机械装置以及控制由该装置施加的力的量的控制装置。
根据该方法的可与本文中提出的任一实施例自由结合的另一实施例,所述控制装置遵循在该装置被植入之前即已制定的递增量的程序。作为替代,所述控制装置遵循在植入之后和/或在治疗期间传达至该控制装置的递增量的程序。
根据该方法的可与本文中提出的任一实施例自由结合的另一实施例,该装置在治疗结束之后固定。
根据一个实施例,通过向该装置填充用以固定该调整装置的位置并使锚固装置之间的距离保持不变的材料来固定所述装置。优选地,所述材料选自用于固化、交联或以其它方式达到并保持固定体积的医用泡沫材料、医用凝胶、聚合物或聚合物混合物。
根据另一实施例,所述装置为液压装置,且该液压液体的材料选自用于在使用者开始治疗、固化、交联或其它反应时固化、交联或以其它方式达到并保持固定体积的医用泡沫材料、医用凝胶、聚合物或聚合物混合物。
根据另一实施例,所述装置为液压装置,且向所述装置添加从用于固化、交联或以其它方式达到并保持固定体积的医用泡沫材料、医用凝胶、聚合物或聚合物混合物中选出的材料,以部分或者全部替代液压液。
另一实施例包括一种用于牵引成骨的方法,其中使用植入式液压装置或机械装置使断骨经受间歇力和/或振荡力。
另一实施例是一种通过提供包括至少两个根据本文任一实施例的锚固装置在内的用于骨调整的装置治疗哺乳动物患者骨功能异常的方法,该方法包括步骤:
i.在所述哺乳动物患者的腔内嵌入针状或管状器械;
ii.通过经所述针状或管状器械导入流体来为所述腔加压从而扩展所述腔;
iii.在所述腔中放入至少两个腹腔镜套管针;
iv.经所述腹腔镜套管针之一向所述腔中嵌入摄像机;
v.经所述至少两个腹腔镜套管针之一嵌入至少一个解剖工具;
vi.解剖功能异常骨的区域;
vii.将用于骨调整的装置和锚固装置放入所述骨的骨髓腔中;
viii.将所述锚固装置与所述骨接触地锚固;
ix.优选地分层闭合哺乳动物体;和
x.在术后以非侵入方式调整所述骨。
另一实施例是一种通过提供包括至少两个根据本文任一实施例的锚固装置在内的用于骨调整的装置治疗哺乳动物患者骨功能异常的方法,包括步骤:
i.切开所述哺乳动物患者的皮肤;
ii.解剖功能异常骨的区域;
iii.将装置放入所述骨的骨髓腔中;
iv.将所述锚固装置与所述骨接触地锚固;
v.优选地分层闭合哺乳动物体;和
vi.在术后以非侵入方式调整所述骨。
根据上述任一实施例的方法优选包括取出所述器械的步骤。
根据上述任一实施例的方法优选包括使用缝线或者缝合钉闭合皮肤的步骤。
根据该方法的另一实施例,该解剖步骤包括解剖上肢或下肢的区域,而解剖上肢或下肢的区域包括解剖下述骨中至少之一的区域:锁骨、肩胛骨、肱骨、桡骨、尺骨、骨盆骨、股骨、胫骨、腓骨和跟骨。
根据该方法的另一实施例,该解剖步骤包括解剖上肢或下肢的区域,而解剖上肢或下肢的区域包括解剖以下关节中至少之一的区域:肩、肘、髋、膝、手和脚。
根据该方法的另一实施例,通过钻孔制作到骨髓腔的开口。
本发明还涉及一个包括根据本文所提出的任一项实施例的器具的系统。
根据该系统的另一实施例,所述系统包括至少一个植入患者体内以手动及非侵入性方式控制该器具的开关。
根据另一实施例,所述系统进一步包括具有可植入液压贮液器的液压装置,该液压装置以液压方式连接到该器具,该器具适于通过手动按压该液压贮液器进行非侵入式调节。
根据另一实施例,所述系统进一步包括用于以非侵入方式控制该器具的无线遥控器。
根据另一实施例,该无线遥控器包括至少一个外部信号发射器和/或接收器,进一步包括可植入患者体内用于接收由该外部信号发射器发射的信号或传输信号给外部信号接收器的内部信号接收器和/或发射器。
根据另一实施例,所述无线遥控器发射至少一个用于控制该器具的无线控制信号。
根据另一实施例,所述无线控制信号可包括调频信号、调幅信号或调相信号、或者上述信号的组合。
根据另一实施例,所述无线遥控器发射携带该控制信号的电磁载波信号。
根据另一实施例,所述系统进一步包括用无线能量对该器具的可植入耗能部件进行非侵入式激励的无线能量传输装置。
根据另一实施例,所述无线能量可包括选自下述的波信号:声波信号、超声波信号、电磁波信号、红外光信号、可见光信号、紫外光信号、激光信号、微波信号、无线电波信号、X射线辐射信号和伽玛辐射信号。
根据另一实施例,所述无线能量包括下述之一:电场、磁场、组合电磁场。
根据另一实施例,所述控制信号包括下述之一:电场、磁场、组合电磁场。
根据另一实施例,所述信号包括模拟信号、数字信号或模拟信号和数字信号的组合。
根据另一实施例,所述系统进一步包括为该器具的可植入耗能部件供能的可植入内部能源。
根据另一实施例,所述系统进一步包括用于采用无线模式传输能量的外部能源,其中,采用无线模式传输的能量可蓄入该内部能量源。
根据另一实施例,所述系统进一步包括检测或测量与用以蓄入该内部能源的能量的传输有关的功能参数的传感器或测量装置和用于将反馈信息从患者体内发送到患者体外的反馈装置,该反馈信息与该传感器检测的或该测量装置测量的功能参数相关。
根据另一实施例,所述系统进一步包括用于将反馈信息从患者体内发送到患者体外的反馈装置,该反馈信息与该患者的物理参数和/或与该器具相关的功能参数有关。
根据再一实施例,所述系统进一步包括传感器和/或测量装置以及响应于与由该传感器检测到的或由该测量装置测量到的患者物理参数和/或由该传感器检测到的或该测量装置测量到的该器具相关功能参数有关的信息控制该器具的可植入内部控制单元。所述物理参数是压力或能动性运动。
根据再一实施例,所述系统进一步包括外部数据通信器和与外部数据通信器通信的可植入内部数据通信器,其中内部通信器反馈与该器具或患者有关的数据给外部数据通信器和/或外部数据通信器反馈数据给内部数据通信器。
根据再一实施例,所述系统进一步包括用于操作该器具的马达或泵。
根据再一实施例,所述系统进一步包括用于操作该器具的液压操作装置。
根据再一实施例,所述系统进一步包括用于操作该器具的操作装置,其中该操作装置包括设计用来降低该操作装置操作该器具所需作用力的伺服机构或机械放大器,取代由该操作装置以较为持久的方式(增加用于所确定的行为的时间)起作用。
根据另一实施例,所述系统进一步包括用于操作该器具的操作装置,其中,随着无线能量由能量传输装置传输,无线能量用来以其无线状态直接为操作装置供能以产生供该器具操作之用的动能。
根据另一实施例,所述系统进一步包括用于将该能量传输装置所传输的无线能量从第一形式转换为第二形式能量的能量转换装置。
根据一个实施例,随着该能量转换装置将该能量传输装置所传输的第一形式能量转换为第二形式能量,所述能量转换装置直接用第二形式能量为该器具的可植入耗能部件供能。
根据一个实施例,所述第二形式能量包括直流、脉动直流和交流中的至少一种。
根据另一实施例,所述系统进一步包括可植入蓄能器,其中第二形式能量至少部分用于蓄入该蓄能器中。
根据一个可与本文中提出的任一实施例自由组合的实施例,所述第一形式能量或第二形式能量包括磁能、动能、声能、化学能、辐射能、电磁能、光能、核能、热能、非磁性能、非动力能、非化学能、非声能、非核能或非热能中的至少一个。
根据另一实施例,所述系统进一步包括可植入电子部件,所述可植入电子部件包括至少一个电压电平防护器和/或至少一个恒流防护器。
根据另一实施例,所述系统进一步包括用于控制从该能量传输装置的无线能量传输的控制装置以及用于接收所传输的无线能量的可植入内部能量接收器,此内部能量接收器连接到该器具的植入式耗能部件以直接或间接地向该器具的耗能部件供应所接收的能量,该系统进一步包括适于测定由该内部能量接收器所接收的能量与该器具的植入式耗能部件所用能量之间的能量平衡的测定装置,其中该控制装置基于由该测定装置测定的能量平衡,控制从该外部能量传输装置的无线能量传输。
根据一个实施例,所述测定装置适于检测能量平衡的变化,且该控制装置基于所检测的能量平衡变化控制无线能量传输。
根据另一实施例,所述测定装置适于检测由内部能量接收器接收的能量与该器具的可植入耗能部件所用能量之间的差值,且该控制装置基于所检测的能量差值控制无线能量传输。
根据另一实施例,该能量传输装置包括置于人体外部的线圈,该能量传输装置进一步包括置于人体内部的可植入能量接收器以及连接为向该外部线圈供以电脉冲以传输无线能量的电子电路,该电脉冲具有前沿和后沿,且该电子电路适于改变电脉冲的前沿与继起的后沿之间的第一时间间隔和/或电脉冲的后沿与继起的前沿之间的第二时间间隔以改变所传输无线能量的功率,接收所传输的无线能量的能量接收器的功率是变化的。
根据再一实施例,所述电子电路适于令电脉冲保持不变,除改变第一时间间隔和/或第二时间间隔之外。
根据另一实施例,该电子电路具有一时间常数,且适于仅在该第一时间常数范围之内改变第一时间间隔和第二时间间隔,以便在第一时间间隔和/或第二时间间隔的长度改变时,经线圈发射的功率随之改变。
根据另一实施例,所述系统进一步包括用于接收无线能量的可植入内部能量接收器,该能量接收器具有内部第一线圈和连接到该第一线圈的第一电子电路;和用于发射无线能量的外部能量发射器,该能量发射器具有外部第二线圈和连接到该第二线圈的第二电子电路,其中该能量发射器的外部第二线圈发射由能量接收器的第一线圈接收的无线能量,该系统进一步包括用于切换开闭内部第一线圈到第一电子电路的连接的电源开关,从而在该电源开关切换开闭内部第一线圈到第一电子电路的连接时,由外部能量发射器接收与第一线圈的充电相关的反馈信息(其形式为外部第二线圈的负载中的阻抗变化)。
根据另一实施例,所述系统进一步包括用于接收无线能量的可植入内部能量接收器和用于发射无线能量的外部能量发射器,该能量接收器具有内部第一线圈和连接到该第一线圈的第一电子电路,而该能量发射器具有外部第二线圈和连接到该第二线圈的第二电子电路,其中该能量发射器的外部第二线圈发射由能量接收器的第一线圈接收的无线能量,该系统进一步包括用于将第一线圈接收的能量数量作为反馈信息向外传递的反馈装置,且其中该第二电子电路包括用于接收反馈信息并将第二线圈的传输能量数量和与第一线圈中接收的能量数量有关的反馈信息进行比较以获取第一线圈和第二线圈之间的耦合因子的测定装置。
根据一个实施例,所传输能量可根据获取的耦合因子来调节。
根据另一实施例,所述外部第二线圈适于相对该内部第一线圈移动以确立使耦合因子最大化的第二线圈最佳位置。
根据另一实施例,所述外部第二线圈适于在耦合因子最大化之前标定所传输能量数量以获得该测定装置中的反馈信息。
根据另一实施例,所述机械装置包括机械式多阶锁闭机构,用于将调整后的机械装置锁定在其新位置处。
根据再一实施例,该机械式多阶锁闭机构包括短距件、采用锯齿、凸缘、倒钩或盖带原理的细长结构、螺母、变速箱或锁闭原理的受载弹簧中的至少一个。
根据一个实施例,所述液压调整装置适于在骨调整结束时被固定。
根据一个实施例,所述液压调整装置可填充以固定该调整装置的位置并使锚固装置之间的距离保持不变的材料。
在上述实施例中,所述材料优选选自用于固化、交联或以其它方式达到并保持固定体积的医用泡沫材料、医用凝胶、聚合物或聚合物混合物。
根据一个实施例,所述装置中使用的所述液压流体的材料选自用于在使用者开始治疗、固化、交联或其它反应时固化、交联或以其它方式达到并保持固定体积的医用泡沫材料、医用凝胶、聚合物或聚合物混合物。
在上述实施例中,向所述装置添加选自用于固化、交联或以其它方式达到并保持固定体积的医用泡沫材料、医用凝胶、聚合物或聚合物混合物,以部分或者完全替代液压流体。
根据另一实施例,所述装置包括控制装置。所述控制装置优选遵循在该装置被植入之前即已制定的递增量的程序。作为替代,所述控制装置遵循在植入之后和/或在治疗期间传达至该控制装置的递增量的程序。
根据一个实施例,所述控制装置包括外部控制单元和适于与所述外部控制单元进行无线通信的可植入接收器,所述外部控制单元具有位于体外的发射器。
根据另一实施例,所述控制装置通过使用所述外部控制单元控制植入之后和/或治疗期间传达至该接收器的调整装置递增量。
根据可与本文所提出的任何其它实施例自由组合的另一实施例,所述调整装置适于调整骨扭矩。
根据另一实施例,所述调整装置适于改变骨角。
根据另一实施例,所述调整装置包括至少包括两个部件,其中这两个部件适于相对彼此旋转。
根据另一实施例,所述相对旋转由所述至少两个锚固装置进行锚固。
根据另一实施例,所述调整装置包括至少两个部件,其中这两个部件适于彼此成一角度。
根据另一实施例,所述调整装置适于改变骨(包括脊柱在内)的曲度。
根据另一实施例,所述调整装置适于关节或脊椎重组或重定位,关节或脊椎重组或重定位包括脊柱形状重整或支撑。
根据另一实施例,两个或更多个锚固装置适于完全在该骨的外部接合并承载重量。
根据该装置的另一实施例,所述两个或更多个锚固装置适于以不穿透至该骨内部,即该骨的骨髓,的方式与该骨接合并承载重量。
根据另一实施例,所述调整装置适于置于该骨外部。
根据再一实施例,所述装置包括直接或者间接检测该调整装置的位置的传感器。
根据另一实施例,该装置包括适于将直接或者间接从所述传感器接收到的信息从人体发射出的反馈发射器,所述发射的信息适于由外部控制单元接收并与该调整装置的位置相关。
根据一个实施例,所述操作装置是以三相马达方式运转的马达。作为替代,所述操作装置是以两相或更多相马达的方式运转的马达。
根据再一实施例,所述装置包括连接到该马达的变速箱,即马达箱,其中该马达箱的输出速度低于所述马达本身的速度,这是由所述变速箱实现的。
根据再一实施例,由所述电子速度控制器降低所述马达箱中的马达的所述输出速度。
根据一个实施例,所述马达为旋转马达且该马达箱的输出速度降至低于每秒100转,或降至低于每秒10转,或降至低于每秒1转,或降至低于每秒0.1转,或降至低于每秒0.01转,或降至低于每秒0.001转。
根据另一实施例,所述装置包括连接到该马达的电子速度控制器,即马达箱,其中由所述电子速度控制器控制所述马达箱的马达的输出速度。
根据一个实施例,所述马达为线性马达且该马达箱的输出速度低于每秒1毫米,或低于每秒0.1毫米,或低于每秒0.01毫米,或低于每秒0.001毫米,或低于每秒0.0001毫米,或低于每秒0.00001毫米。
应注意,上述实施例以及在各实施例中出现的特征可自由组合。
范例
存在供研究骨折愈合所用的动物模型,例如兔腓骨模型、用于骨质疏松骨折治疗的羊模型、鼠股骨骨折模型。不难设想,可在现有动物模型(优选涉及使用大型哺乳动物,例如羊、猪、狗、猴等的模型)上测试创造性装置和方法。
亦有供评价骨折愈合所用的非侵入性方法,举例来说见描述骨折愈合的定量超声监测的评论文章(Protopappas等人,2008)。
在适合的动物模型上,实验动物被麻醉且一骨被解剖和断裂。当解剖该骨时,采取审慎态度,举例来说通过将组织折叠到或拉到侧边(而非将之从原位切除)以使组织损伤最小。在骨上于骨折两侧固定针或其它锚固装置以及附连到所述锚固装置上的根据本发明的装置。组织被仔细地放回原位,优选逐层地放回原位,并闭合动物体。在适当的初步治疗阶段之后,采用非侵入式方式调整断裂区。定期观察诸如骨愈合、疼痛和感染或炎症信号之类的迹象。在安乐死之后,解剖骨并分析骨折区。
实验可在相同或不同的动物模型上重复并进行必要的修改,以对脊椎曲度调整、关节重组、骨曲度改变等进行评估。
虽然已结合本发明的优选实施例对之进行了描述,而这些优选实施例正是发明人当前所知的最佳模式,但是应理解,对于本领域普通技术人员来说,在不背离所附权利要求中限定的本发明的范围的情况下,不难作出各种变化与修改。
参考文献
Consolo U,Bertoldi C,Zaffe D,间歇负载改善下颌牙槽牵引成骨的结果(Intermittent loading improves results in mandibular alveolar distractionosteogenesis),临床与实验医学口腔植入研究(Clin Oral Implants Res).2006Apr;17(2):179-87.
Gabbay JS,Zuk PA,Tahernia A,Askari M,O'Hara CM,Karthikeyan T,Azari K,Hollinger JO,Bradley JP,骨前驱细胞的体外微牵引:牵引促进增殖以及震荡促进分化(In vitro microdistraction of preosteoblasts:distraction promotesproliferation and oscillation promotes differentiation),组织工程(Tissue Eng).2006Nov;12(11):3055-65.
Hente R, B,Schlegel U,Ernstberger A,Perren SM.,循环压缩和牵引最实验性胫骨骨折愈合的影响(The influence of cyclic compression anddistraction on the healing of experimental tibial fractures).J骨科研究(JOrthop Res).,2004Jul;22(4):709-15
B,Schlegel U,Ernstberger A,Perren SM.,循环压缩和牵引最实验性胫骨骨折愈合的影响(The influence of cyclic compression anddistraction on the healing of experimental tibial fractures).J骨科研究(JOrthop Res).,2004Jul;22(4):709-15
Protopappas VC,Vavva MG,Fotiadis Dl,Malizos KN,IEEE贯穿超声铁电频率控制(Trans Ultrason Ferroelectr Freq Control).2008;55(6):1243-55
Snela S,Kisiel J,Gregosiewicz A, F.,通过牵引成骨的下肢力量中在伊利扎洛夫和奥斯菲克斯仪器产生的力的生物力学研究(Biomechanical studies offorces occurring in the llizarov and Orthofix apparatuses during limblengthening by distractive osteogenesis),奇尔运动器官骨科研究(Chir NarzadowRuchu Ortop Pol).2000;65(2):155-66.[波兰(Article in Polish)]
F.,通过牵引成骨的下肢力量中在伊利扎洛夫和奥斯菲克斯仪器产生的力的生物力学研究(Biomechanical studies offorces occurring in the llizarov and Orthofix apparatuses during limblengthening by distractive osteogenesis),奇尔运动器官骨科研究(Chir NarzadowRuchu Ortop Pol).2000;65(2):155-66.[波兰(Article in Polish)]
Claims (43)
1.一种用于哺乳动物骨调整的可植入装置,包括:用于将所述装置附连至所述哺乳动物的骨的两个或更多个锚固装置,以及用于在所述锚固装置上施加力以调整所述锚固装置中的至少两个之间的距离或者调整所述锚固装置中的至少两个的方向的调整装置,其中所述锚固装置和所述调整装置从骨髓内植入所述哺乳动物的骨中,所述锚固装置适于完全在所述哺乳动物体内的该骨的内部接合并承载重量,并且其中所述调整装置被构造为在术后调整所述距离或方向,其中所述调整装置由操作装置操作,所述操作装置包括马达,具有马达定位系统或装置定位系统,以查看所述调整装置的位置,其中所述调整装置进一步包括控制装置,其中所述操作装置由所述控制装置控制,所述控制装置包括内部控制单元,所述内部控制单元适于是以下中的任一项:
-能够从患者体外编程;
-被编程为根据预先编制的时间表来调节所述可植入装置;以及
-被编程为根据来自感知患者的任何可能的物理参数或者所述可植入装置的任何功能参数的传感器的输入来调节所述可植入装置。
2.根据权利要求1所述的可植入装置,其中所述控制装置进行以下中的任一项:
-遵循在该可植入装置被植入之前即已制定的递增量的程序;以及
-遵循在植入之后和/或在治疗期间传达至该控制装置的递增量的程序。
3.根据权利要求1或2所述的可植入装置,其中所述调整是骨延长、骨压缩、骨折愈合、骨角改变、骨重塑、用于矫正由先天条件、畸形或先前创伤引起的肢体不等长的治疗、改变骨的曲度、改变骨扭矩、改变骨厚度、调整相邻或不相邻的椎骨,以适于改变以下中的至少一项:脊柱的曲度,以及减轻腰椎间盘突出。
4.根据权利要求1所述的可植入装置,其中,适于完全在该骨的内部接合并承载重量包括两个或更多个锚固装置适于以不穿透至该骨外部的方式与该骨接合并承载重量。
5.根据权利要求1或2所述的可植入装置,其中所述调整装置施加的力是以下中的任一项:
-延长该骨长度的纵向力;
-指向骨髓腔的端部;
-调整该骨的角度或曲度的纵向力;以及
-应用扭力至该骨,调整该骨沿其纵轴的扭矩。
6.根据权利要求1或2所述的可植入装置,其中所述调整装置是以下中的任一项:
-适于改变骨扭矩;
-适于改变骨的角度;
-适于具有至少两个部件,其中这两个部件相对彼此旋转;
-适于具有至少两个部件,其中这两个部件彼此成一角度;
-适于改变骨的曲度。
7.根据权利要求1或2所述的可植入装置,其中所述调整装置适于改变脊柱的曲度。
8.根据权利要求7所述的可植入装置,其中适于改变脊柱的曲度包括:
-适于相邻的椎骨,适于改变以下中的任一项:脊柱的曲度,以及减轻腰椎间盘突出;
-适于不相邻的椎骨,适于改变以下中的任一项:脊柱的曲度,以及减轻腰椎间盘突出。
9.根据权利要求6所述的可植入装置,
所述两个部件的相对彼此旋转由至少两个锚固装置进行锚固。
10.根据权利要求1或2所述的可植入装置,其中所述控制装置进行以下中的任一项:
通过使用所包含的外部控制单元及一植入式接收器控制在植入之后和/或在治疗期间传达至所述接收器的所述调整装置的递增量,所述植入式接收器适于与所述外部控制单元进行无线通信,所述外部控制单元具有位于体外的发射器;
通过手动按压至少一个皮下开关借以开启和关闭所述可植入装置的操作来实现以非侵入方式调节所述可植入装置,其中所述可植入装置的可植入耗能部件由可植入内部能量源供能;以及
通过手动按压至少一个皮下开关来实现以非侵入方式调节所述可植入装置,其中所述开关发送信息到所述内部控制单元以执行某项预定性能。
11.根据权利要求1或2所述的可植入装置,其中所述调整装置包括:
-用于所述骨调整的机械装置。
12.根据权利要求11所述的可植入装置,其中所述机械装置包括以下中的任一项:
-至少一个螺母和螺钉;
-至少一个变速箱;
-伺服机构或机械放大器;
-机械式多阶锁闭机构,用于将调整后的机械装置锁定在其新位置处。
13.根据权利要求12所述的可植入装置,
该机械式多阶锁闭机构包括短距件、采用锯齿、凸缘、倒钩或盖带原理的细长结构、螺母、变速箱或锁闭原理的受载弹簧中的至少一个。
14.根据权利要求1或2所述的可植入装置,其中所述调整装置包括用于所述骨调整的液压装置,所述液压装置是以下中的任一项:
-包括汽缸和活塞;
-包括机械式多阶锁闭机构,用于在调整后将该液压装置锁定在其新位置处;
-包括液压流体和容纳该流体的贮液器,适于将所述流体移至所述调整装置中;
-适于在完成骨调整后被固定;
-适于填充以用于固定该调整装置的位置并使所述锚固装置之间的距离保持不变的材料。
15.根据权利要求14所述的可植入装置,
其中该机械式多阶锁闭机构包括短距件、采用锯齿、凸缘、倒钩或盖带原理的细长结构、螺母、变速箱或锁闭原理的受载弹簧中的至少一个。
16.根据权利要求14所述的可植入装置,
其中适于将所述流体移至所述调整装置中包括通过利用预加压贮液器或泵将所述液压流体从所述贮液器移至所述调整装置中。
17.根据权利要求14所述的可植入装置,
其中在完成骨调整后被固定,用于固定所述调整装置的位置并使所述锚固装置之间的距离保持不变的材料选自用于固化、交联或以其它方式达到并保持稳定体积的聚合物或聚合物混合物。
18.根据权利要求17所述的可植入装置,其中所述聚合物或所述聚合物混合物是医用泡沫材料或医用凝胶。
19.根据权利要求14所述的可植入装置,
其中在完成骨调整后被固定,所述液压装置中所用的液压流体的材料选自用于在使用者开始治疗、固化、交联或其它反应时固化、交联或以其它方式达到并保持稳定体积的聚合物或聚合物混合物。
20.根据权利要求19所述的可植入装置,其中所述聚合物或所述聚合物混合物是医用泡沫材料或医用凝胶。
21.根据权利要求17所述的可植入装置,
所述用于固定该调整装置的位置并使所述锚固装置之间的距离保持不变的材料被添加到所述液压装置,部分地或者完全地替代液压流体。
22.根据权利要求1或2所述的可植入装置,其中所述操作装置是以下中的任一项:
-以两相或更多相马达的方式运转的马达;
-操作包括在所述调整装置中的伺服机构或机械放大器;
-包括以下中的任一项:
连接到马达的变速箱,即马达箱,其中该马达箱的输出速度低于马达本身的速度,这是由所述变速箱实现的,以及
连接到马达的电子速度控制器,由所述电子速度控制器降低马达箱中的马达的输出速度,
其中包括所述变速箱或所述电子速度控制器的所述操作装置是以下中的任一项:
旋转马达,且马达箱的输出速度降至低于每秒100转,
线性马达,且马达箱的输出速度低于每秒1毫米。
23.根据权利要求22所述的可植入装置,
其中所述两相或更多相马达是三相马达。
24.根据权利要求22所述的可植入装置,
其中所述伺服机构被设计用来在作用冲程长的情况下降低所述操作装置的力。
25.根据权利要求22所述的可植入装置,其中所述操作装置为旋转马达且马达箱的输出速度降至低于每秒10转。
26.根据权利要求22所述的可植入装置,其中所述操作装置为旋转马达且马达箱的输出速度降至低于每秒1转。
27.根据权利要求22所述的可植入装置,其中所述操作装置为旋转马达且马达箱的输出速度降至低于每秒0.1转。
28.根据权利要求22所述的可植入装置,其中所述操作装置为旋转马达且马达箱的输出速度降至低于每秒0.01转。
29.根据权利要求22所述的可植入装置,其中所述操作装置为旋转马达且马达箱的输出速度降至低于每秒0.001转。
30.根据权利要求22所述的可植入装置,其中所述操作装置为线性马达且马达箱的输出速度低于每秒0.1毫米。
31.根据权利要求22所述的可植入装置,其中所述操作装置为线性马达且马达箱的输出速度低于每秒0.01毫米。
32.根据权利要求22所述的可植入装置,其中所述操作装置为线性马达且马达箱的输出速度低于每秒0.001毫米。
33.根据权利要求22所述的可植入装置,其中所述操作装置为线性马达且马达箱的输出速度低于每秒0.0001毫米。
34.根据权利要求22所述的可植入装置,其中所述操作装置为线性马达且马达箱的输出速度低于每秒0.00001毫米。
35.根据权利要求1或2所述的可植入装置,其中所述可植入装置是以下中的至少一项:
-柔性的以便导入该骨髓腔中;
-适于在已被弯曲之后恢复其形状;
-适于施加间歇力和/或振荡力;以及
-包括允许所述可植入装置延伸但基本上不允许其收缩的锁闭装置;
-包括直接或者间接检测该调整装置的位置的传感器。
36.根据权利要求1或2所述的可植入装置,其中所述可植入装置是至少部分为弹性的并且是柔性的以便导入该骨髓腔中。
37.根据权利要求1或2所述的可植入装置,其中所述可植入装置包括弹簧并且是柔性的以便导入该骨髓腔中。
38.根据权利要求35所述的可植入装置,当所述可植入装置包括直接或者间接检测该调整装置的位置的传感器时,所述可植入装置包括适于将直接或者间接从所述传感器接收到的信息从人体发射出的反馈发射器,所发射的信息适于由外部控制单元接收并与该调整装置的位置相关。
39.根据权利要求1所述的可植入装置,其中所述马达定位系统或所述装置定位系统为转速计或传感器输入端。
40.根据权利要求14所述的可植入装置,其中所述装置定位系统为流体体积或流量测量或者任何其它传感器输入。
41.一种包括根据权利要求1至40中任意一项所述的可植入装置的系统,进一步包括以下中的至少一项:
-检测或测量与用以蓄入内部能源的能量的传输有关的功能参数的传感器或测量装置,和用于将反馈信息从患者体内发送到患者体外的反馈装置,该反馈信息与该传感器检测的或该测量装置测量的功能参数相关,进一步包括为该可植入装置的可植入耗能部件供能的可植入内部能源,以及用于采用无线模式传输能量的外部能源,其中,采用无线模式传输的能量可蓄入该内部能源;
-用于将反馈信息从患者体内发送到患者体外的反馈装置,该反馈信息与该患者的物理参数和/或与该可植入装置相关的功能参数中的至少一个有关;
-传感器和/或测量装置以及可植入内部控制单元,其中,响应于与由该传感器检测到的或由该测量装置测量到的患者物理参数以及由该传感器检测到的或由该测量装置测量到的该可植入装置的功能参数中的至少一个有关的信息,所述可植入内部控制单元控制该可植入装置;
-外部数据通信器和与所述外部数据通信器通信的可植入内部数据通信器,其中内部数据通信器反馈与该可植入装置或患者有关的数据给外部数据通信器和/或外部数据通信器反馈数据给内部数据通信器。
42.根据权利要求41所述的系统,进一步包括以下中的至少一项:
-能够植入患者体内以手动和非侵入方式控制该可植入装置的至少一个开关;
-用于以非侵入方式控制该可植入装置的无线遥控器;
-具有可植入液压贮液器的液压装置,该液压装置以液压方式连接到该可植入装置,其中该可植入装置适于通过手动按压该液压贮液器进行非侵入式调节。
43.根据权利要求41至42中任意一项所述的系统,进一步包括以下中的至少一项:
-用无线能量对该可植入装置的可植入耗能部件进行非侵入式激励的无线能量传输装置;
-为该可植入装置的可植入耗能部件供能的可植入内部能源;以及
-采用无线模式传输能量的外部能源以及为该可植入装置的可植入耗能部件供能的可植入内部能源,其中,采用无线模式传输的能量可蓄入该内部能源;
-可植入电子部件,所述可植入电子部件包括至少一个电压电平防护器和/或至少一个恒流防护器;
-用于将无线能量传输装置所传输的无线能量从第一形式转换为第二形式能量的能量转换装置,其中所述第二形式能量用于至少部分地蓄入一蓄能器中;
-用于操作该可植入装置的操作装置,其中,随着由无线能量传输装置传输无线能量,无线能量用来以其无线状态直接为操作装置供能以产生供该可植入装置操作之用的动能;
-用于将无线能量传输装置所传输的无线能量从第一形式转换为第二形式能量的能量转换装置,其中,随着该能量转换装置将无线能量传输装置所传输的第一形式能量转换为第二形式能量,所述能量转换装置直接用第二形式能量为该可植入装置的可植入耗能部件供能;
-用无线能量对该可植入装置的可植入耗能部件进行非侵入式激励的无线能量传输装置,进一步包括用于控制从无线能量传输装置的无线能量传输的控制装置以及用于接收所传输的无线能量的可植入内部能量接收器,所述内部能量接收器连接到该可植入装置的可植入耗能部件,以直接或间接地向该可植入装置的可植入耗能部件供应所接收的能量,该系统进一步包括适于测定由该内部能量接收器所接收的能量与该可植入装置的可植入耗能部件所用能量之间的能量平衡的测定装置,其中用于控制从无线能量传输装置的无线能量传输的控制装置基于由该测定装置测定的能量平衡,控制从无线能量传输装置的无线能量传输;
-用于将反馈信息从患者体内发送到患者体外的反馈装置,该反馈信息与该患者的物理参数和与该可植入装置相关的功能参数中的至少一个有关;以及用于接收无线能量的可植入内部能量接收器,该内部能量接收器具有内部第一线圈和连接到该第一线圈的第一电子电路;以及用于发射无线能量的外部能量发射器,该外部能量发射器具有外部第二线圈和连接到该第二线圈的第二电子电路,其中该外部能量发射器的外部第二线圈发射由内部能量接收器的第一线圈接收的无线能量,该系统进一步包括用于将第一线圈接收的能量数量作为反馈信息向外传递的反馈装置,且其中该第二电子电路包括用于接收反馈信息并将第二线圈传输的能量数量和与第一线圈中接收的能量数量有关的反馈信息进行比较以获取第一线圈和第二线圈之间的耦合因子的测定装置。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SE0802153 | 2008-10-31 | ||
| SE0802153-7 | 2008-10-31 | ||
| US22780809P | 2009-07-23 | 2009-07-23 | |
| US61/227,808 | 2009-07-23 | ||
| CN200980153587.7A CN102271601B (zh) | 2008-10-31 | 2009-10-29 | 利用无线能量传输进行骨调整的装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN200980153587.7A Division CN102271601B (zh) | 2008-10-31 | 2009-10-29 | 利用无线能量传输进行骨调整的装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN105943145A CN105943145A (zh) | 2016-09-21 |
| CN105943145B true CN105943145B (zh) | 2020-09-08 |
Family
ID=42129061
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN200980153587.7A Active CN102271601B (zh) | 2008-10-31 | 2009-10-29 | 利用无线能量传输进行骨调整的装置 |
| CN201610320491.7A Active CN105943145B (zh) | 2008-10-31 | 2009-10-29 | 利用无线能量传输进行骨调整的装置与方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN200980153587.7A Active CN102271601B (zh) | 2008-10-31 | 2009-10-29 | 利用无线能量传输进行骨调整的装置 |
Country Status (8)
| Country | Link |
|---|---|
| US (5) | US9962199B2 (zh) |
| EP (3) | EP3906872A1 (zh) |
| JP (1) | JP2012507340A (zh) |
| CN (2) | CN102271601B (zh) |
| AU (6) | AU2009310439B2 (zh) |
| BR (1) | BRPI0919860B8 (zh) |
| CA (1) | CA2776500A1 (zh) |
| WO (2) | WO2010050891A1 (zh) |
Families Citing this family (106)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6482145B1 (en) | 2000-02-14 | 2002-11-19 | Obtech Medical Ag | Hydraulic anal incontinence treatment |
| US6464628B1 (en) | 1999-08-12 | 2002-10-15 | Obtech Medical Ag | Mechanical anal incontinence |
| US6471635B1 (en) * | 2000-02-10 | 2002-10-29 | Obtech Medical Ag | Anal incontinence disease treatment with controlled wireless energy supply |
| EP1253877B1 (en) | 2000-02-10 | 2005-05-11 | Potencia Medical AG | Mechanical impotence treatment apparatus |
| MX339106B (es) | 2000-02-11 | 2016-05-12 | Potentica Ag | Aparato para tratamiento de impotencia con medio de transformacion de energia. |
| CN1196451C (zh) | 2000-02-14 | 2005-04-13 | 波滕西亚医疗公司 | 带有无线能量供给的男性阳萎假体设备 |
| AU2001232586A1 (en) | 2000-02-14 | 2001-07-09 | Potencia Medical Ag | Penile prosthesis |
| US7955357B2 (en) | 2004-07-02 | 2011-06-07 | Ellipse Technologies, Inc. | Expandable rod system to treat scoliosis and method of using the same |
| US7862502B2 (en) | 2006-10-20 | 2011-01-04 | Ellipse Technologies, Inc. | Method and apparatus for adjusting a gastrointestinal restriction device |
| US20090112262A1 (en) | 2007-10-30 | 2009-04-30 | Scott Pool | Skeletal manipulation system |
| EP2244758A4 (en) * | 2008-01-28 | 2016-12-14 | Kirk Promotion Ltd | DRAINING DEVICE COMPRISING AN ACTIVE FILTER |
| EP3925580A1 (en) | 2008-01-29 | 2021-12-22 | Implantica Patent Ltd. | Apparatus for treating obesity |
| US11202707B2 (en) | 2008-03-25 | 2021-12-21 | Nuvasive Specialized Orthopedics, Inc. | Adjustable implant system |
| WO2010042012A1 (en) | 2008-10-10 | 2010-04-15 | Milux Holding Sa | Heart help device, system, and method |
| EP3851076A1 (en) | 2008-10-10 | 2021-07-21 | MedicalTree Patent Ltd. | An improved artificial valve |
| ES2950024T3 (es) | 2008-10-10 | 2023-10-04 | Medicaltree Patent Ltd | Dispositivo, sistema y procedimiento de ayuda al corazón |
| CA2776467A1 (en) | 2008-10-10 | 2010-04-15 | Peter Forsell | Fastening means for implantable medical control assembly |
| ES2962384T3 (es) | 2008-10-10 | 2024-03-18 | Implantica Patent Ltd | Aparato para el tratamiento de la disfunción sexual femenina |
| EP3120896A1 (en) | 2008-10-10 | 2017-01-25 | Kirk Promotion LTD. | A system, an apparatus, and a method for treating a sexual dysfunctional female patient |
| US11241257B2 (en) | 2008-10-13 | 2022-02-08 | Nuvasive Specialized Orthopedics, Inc. | Spinal distraction system |
| CN102271601B (zh) * | 2008-10-31 | 2016-06-29 | 米卢克斯控股股份有限公司 | 利用无线能量传输进行骨调整的装置 |
| US8382756B2 (en) | 2008-11-10 | 2013-02-26 | Ellipse Technologies, Inc. | External adjustment device for distraction device |
| US8197490B2 (en) | 2009-02-23 | 2012-06-12 | Ellipse Technologies, Inc. | Non-invasive adjustable distraction system |
| US9622792B2 (en) | 2009-04-29 | 2017-04-18 | Nuvasive Specialized Orthopedics, Inc. | Interspinous process device and method |
| US10952836B2 (en) | 2009-07-17 | 2021-03-23 | Peter Forsell | Vaginal operation method for the treatment of urinary incontinence in women |
| US9949812B2 (en) | 2009-07-17 | 2018-04-24 | Peter Forsell | Vaginal operation method for the treatment of anal incontinence in women |
| ES2761267T3 (es) | 2009-09-04 | 2020-05-19 | Nuvasive Specialized Orthopedics Inc | Dispositivo de crecimiento óseo |
| MX2009010782A (es) * | 2009-10-05 | 2010-05-03 | Ruben Fernando Sayago | Distractor interno hidraulico y manejado a control remoto, para la correccion de deformidades oseas de la columna vertebral, o para elongacion de huesos largos en humanos. |
| EP2503947B1 (en) * | 2009-11-25 | 2016-10-26 | Spine21 Ltd. | Spinal rod having a post-operative adjustable dimension |
| US8777947B2 (en) * | 2010-03-19 | 2014-07-15 | Smith & Nephew, Inc. | Telescoping IM nail and actuating mechanism |
| US9248043B2 (en) | 2010-06-30 | 2016-02-02 | Ellipse Technologies, Inc. | External adjustment device for distraction device |
| WO2012021378A2 (en) | 2010-08-09 | 2012-02-16 | Ellipse Technologies, Inc. | Maintenance feature in magnetic implant |
| WO2012112396A2 (en) | 2011-02-14 | 2012-08-23 | Ellipse Technologies, Inc. | Device and method for treating fractured bones |
| BR112013029376A2 (pt) | 2011-05-16 | 2017-01-31 | Smith & Nephew Inc | medição de extensão do esqueleto |
| US9308089B2 (en) | 2011-06-27 | 2016-04-12 | University Of Cape Town | Endoprosthesis |
| US10743794B2 (en) | 2011-10-04 | 2020-08-18 | Nuvasive Specialized Orthopedics, Inc. | Devices and methods for non-invasive implant length sensing |
| WO2013066946A1 (en) | 2011-11-01 | 2013-05-10 | Ellipse Technologies, Inc. | Adjustable magnetic devices and methods of using same |
| WO2013071432A1 (en) | 2011-11-14 | 2013-05-23 | The University Of British Columbia | Intramedullary fixation system for management of pelvic and acetabular fractures |
| US20130165733A1 (en) * | 2011-12-27 | 2013-06-27 | Richard A. Rogachefsky | Orthopedic fixation device with magnetic field generator |
| US9216086B2 (en) * | 2012-02-01 | 2015-12-22 | Zimmer, Inc. | Adjustable provisional component of a medical device |
| JP2013158589A (ja) * | 2012-02-08 | 2013-08-19 | Toshiba Corp | 医用画像診断装置 |
| JP6062150B2 (ja) * | 2012-02-14 | 2017-01-18 | 株式会社ハイレックスコーポレーション | 骨欠損部充填材料 |
| US20130338714A1 (en) | 2012-06-15 | 2013-12-19 | Arvin Chang | Magnetic implants with improved anatomical compatibility |
| EP2897542A4 (en) * | 2012-09-23 | 2016-07-20 | Impetus Innovations Inc | SEGMENTED RECONSTRUCTIVE BRAND NAIL AND DISPOSAL SYSTEM |
| US9044281B2 (en) | 2012-10-18 | 2015-06-02 | Ellipse Technologies, Inc. | Intramedullary implants for replacing lost bone |
| EP2911616B1 (en) * | 2012-10-29 | 2020-10-07 | NuVasive Specialized Orthopedics, Inc. | Adjustable devices for treating arthritis of the knee |
| US9179938B2 (en) * | 2013-03-08 | 2015-11-10 | Ellipse Technologies, Inc. | Distraction devices and method of assembling the same |
| US10226242B2 (en) | 2013-07-31 | 2019-03-12 | Nuvasive Specialized Orthopedics, Inc. | Noninvasively adjustable suture anchors |
| US9801734B1 (en) | 2013-08-09 | 2017-10-31 | Nuvasive, Inc. | Lordotic expandable interbody implant |
| US10751094B2 (en) | 2013-10-10 | 2020-08-25 | Nuvasive Specialized Orthopedics, Inc. | Adjustable spinal implant |
| JP6636420B2 (ja) * | 2013-10-11 | 2020-01-29 | ニューヴェイジヴ,インコーポレイテッド | 骨整形用の装置および方法 |
| CA2978697A1 (en) | 2014-03-06 | 2015-09-11 | The University Of British Columbia | Shape adaptable intramedullary fixation device |
| CN106413604A (zh) | 2014-03-12 | 2017-02-15 | 奥索斯平有限公司 | 预加载的医疗柱 |
| WO2015168175A1 (en) | 2014-04-28 | 2015-11-05 | Ellipse Technologies, Inc. | System for informational magnetic feedback in adjustable implants |
| DE102014112573A1 (de) * | 2014-09-01 | 2016-03-03 | Wittenstein Ag | Marknagel |
| EP3206608B1 (en) | 2014-10-14 | 2023-07-05 | The University of British Columbia | Systems for intramedullary bone fixation |
| US9931138B2 (en) * | 2014-10-15 | 2018-04-03 | Globus Medical, Inc. | Orthopedic extendable rods |
| WO2016065205A1 (en) * | 2014-10-23 | 2016-04-28 | Ellipse Technologies, Inc. | Remotely adjustable interactive bone reshaping implant |
| CN104382639B (zh) * | 2014-11-20 | 2017-02-22 | 新疆医科大学第一附属医院 | 一种髓内骨延长骨搬移装置 |
| AU2015371247B2 (en) | 2014-12-26 | 2020-06-04 | Nuvasive Specialized Orthopedics, Inc. | Systems and methods for distraction |
| CA2917676A1 (en) | 2015-01-13 | 2016-07-13 | Stryker European Holdings I, Llc | Growing rods and methods of use |
| US10238427B2 (en) | 2015-02-19 | 2019-03-26 | Nuvasive Specialized Orthopedics, Inc. | Systems and methods for vertebral adjustment |
| DE102015109624A1 (de) * | 2015-06-16 | 2016-12-22 | Wittenstein Se | Mechatronisches Implantat |
| ES2596511B1 (es) * | 2015-07-09 | 2017-09-12 | Universidad De Burgos | Dispositivo telescópico intramedular para elongación de huesos largos |
| US10136929B2 (en) | 2015-07-13 | 2018-11-27 | IntraFuse, LLC | Flexible bone implant |
| US10154863B2 (en) | 2015-07-13 | 2018-12-18 | IntraFuse, LLC | Flexible bone screw |
| US10485595B2 (en) | 2015-07-13 | 2019-11-26 | IntraFuse, LLC | Flexible bone screw |
| US10499960B2 (en) | 2015-07-13 | 2019-12-10 | IntraFuse, LLC | Method of bone fixation |
| WO2017066774A1 (en) | 2015-10-16 | 2017-04-20 | Nuvasive Specialized Orthopedics, Inc. | Adjustable devices for treating arthritis of the knee |
| US10092333B2 (en) | 2015-11-20 | 2018-10-09 | Globus Medical, Inc. | Expandable intramedullary systems and methods of using the same |
| US9827025B2 (en) | 2015-11-20 | 2017-11-28 | Globus Medical, Inc. | Expandable intramedullary systems and methods of using the same |
| US9974581B2 (en) | 2015-11-20 | 2018-05-22 | Globus Medical, Inc. | Expandable intramedullary systems and methods of using the same |
| EP3386405B1 (en) | 2015-12-10 | 2023-11-01 | NuVasive Specialized Orthopedics, Inc. | External adjustment device for distraction device |
| KR101666527B1 (ko) * | 2015-12-14 | 2016-10-24 | 권용원 | 뼈 성장 촉진용 임플란트 장치 |
| ES2879405T3 (es) | 2016-01-28 | 2021-11-22 | Nuvasive Specialized Orthopedics Inc | Sistemas para transporte óseo |
| WO2017139548A1 (en) | 2016-02-10 | 2017-08-17 | Nuvasive Specialized Orthopedics, Inc. | Systems and methods for controlling multiple surgical variables |
| US10456172B2 (en) | 2016-02-12 | 2019-10-29 | Nuvasive, Inc. | Magnetically actuateable rod insertion for minimally invasive surgery |
| WO2017139780A1 (en) * | 2016-02-12 | 2017-08-17 | Nuvasive, Inc. | Magnetically actuateable rod insertion for minimally invasive surgery |
| FI20165445A (fi) * | 2016-05-27 | 2017-11-28 | Synoste Oy | Kehon sisäinen teleskooppinen osteodistraktiolaite, kehon ulkoinen tehoa tuottava laite, menetelmä luunpidennystä varten ja luunpidennysjärjestely |
| EP4318173A2 (en) * | 2016-07-18 | 2024-02-07 | NuVasive Specialized Orthopedics, Inc. | Communication device and methods |
| US11419645B2 (en) | 2016-10-05 | 2022-08-23 | University Of British Columbia | Intramedullary fixation device with shape locking interface |
| CN108236491B (zh) * | 2016-12-24 | 2021-07-13 | 王培林 | 一种骨块间轴向加压力可调的骨折外固定架 |
| KR102168431B1 (ko) * | 2017-10-24 | 2020-10-21 | 경북대학교 산학협력단 | 능동형 견인장치 및 이의 제어 방법 |
| US20190117285A1 (en) * | 2017-10-24 | 2019-04-25 | Hae Sun Paik | Checking apparatus for bone conglutination |
| EP3491998B1 (en) | 2017-11-30 | 2021-03-31 | Endotact | Implantable distraction device |
| US10596384B2 (en) * | 2018-03-21 | 2020-03-24 | Garwood Medical Devices, Llc | Method and system for bone regeneration |
| EP3776568A1 (en) * | 2018-04-05 | 2021-02-17 | Smith&Nephew, Inc. | Devices, software, systems, and methods for intraoperatively and postoperatively tracking the relative position between external fixation components or rings |
| US11446064B2 (en) | 2018-04-26 | 2022-09-20 | Stryker European Operations Holdings Llc | Orthopedic growing devices |
| JP2022500211A (ja) * | 2018-09-10 | 2022-01-04 | エイエムビー オーソペディクス インコーポレイテッドAmb Orthopedics, Inc. | グローイングロッド調整システム及び方法 |
| EP3866713A4 (en) | 2018-10-17 | 2022-06-29 | The University of British Columbia | Bone-fixation device and system |
| US11000226B2 (en) * | 2018-11-09 | 2021-05-11 | DePuy Synthes Products, Inc. | Methods and apparatus for alignment of sensor communication devices with implanted bone healing sensors |
| CN109700518B (zh) * | 2019-01-29 | 2021-11-09 | 南方医科大学南方医院 | 一种髓内骨延长辅助装置 |
| JP2022519380A (ja) | 2019-02-07 | 2022-03-23 | ニューベイシブ スペシャライズド オーソペディックス,インコーポレイテッド | 医療デバイスにおける超音波通信 |
| US11589901B2 (en) | 2019-02-08 | 2023-02-28 | Nuvasive Specialized Orthopedics, Inc. | External adjustment device |
| TR201907277A2 (tr) * | 2019-05-14 | 2020-11-23 | Univ Yildiz Teknik | Tümör protezi otonom kontrol ve uzatma sistemi. |
| GB2589817B (en) * | 2019-06-20 | 2022-02-09 | Patel Shailen | Cranial restructuring devices |
| CN110638512B (zh) * | 2019-10-09 | 2021-02-12 | 温州医科大学附属第二医院、温州医科大学附属育英儿童医院 | 一种新型脊柱畸形矫正器 |
| WO2022055678A1 (en) * | 2020-09-08 | 2022-03-17 | Nuvasive Specialized Orthopedics, Inc. | Remote control module for adjustable implants |
| CN112244976A (zh) * | 2020-10-22 | 2021-01-22 | 中国科学院力学研究所 | 一种预储能式无线电控延长髓内针 |
| EP4294298A1 (en) | 2021-02-16 | 2023-12-27 | Tetravision, LLC | Spinal alignment system with thermally actuated component |
| JP2024509771A (ja) | 2021-02-23 | 2024-03-05 | ニューベイシブ スペシャライズド オーソペディックス,インコーポレイテッド | 調整可能なインプラント、システム、及び方法 |
| US20220304730A1 (en) * | 2021-03-26 | 2022-09-29 | Nuvasive Specialized Orthopedics, Inc. | Intramedullary device for ankle fusion |
| US11737787B1 (en) | 2021-05-27 | 2023-08-29 | Nuvasive, Inc. | Bone elongating devices and methods of use |
| EP4104895A1 (en) | 2021-06-14 | 2022-12-21 | Instituto Politécnico De Leiria | Intelligent biomimetic biodevice and use thereof |
| CN113720915B (zh) * | 2021-11-02 | 2021-12-31 | 张家港蓝智生物科技有限公司 | 一种骨植入物内部裂纹探伤检测设备 |
| WO2024042541A1 (en) * | 2022-08-23 | 2024-02-29 | Raycura Medical Technologies Private Limited | Wirelessly operable implant system for providing controlled lengthening of a bone |
Family Cites Families (82)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3837228A1 (de) * | 1987-11-05 | 1990-05-03 | Robert Dr Sturtzkopf | Vorrichtung zum externen festlegen von knochenfragmenten |
| DE3921972C2 (de) * | 1989-07-04 | 1994-06-09 | Rainer Dr Med Baumgart | Marknagel |
| US5156605A (en) * | 1990-07-06 | 1992-10-20 | Autogenesis Corporation | Automatic internal compression-distraction-method and apparatus |
| CA2093828A1 (en) * | 1992-04-16 | 1993-10-17 | Anthony Philip Pohl | External bone fixation device |
| US5466261A (en) * | 1992-11-19 | 1995-11-14 | Wright Medical Technology, Inc. | Non-invasive expandable prosthesis for growing children |
| US5429638A (en) * | 1993-02-12 | 1995-07-04 | The Cleveland Clinic Foundation | Bone transport and lengthening system |
| US5626579A (en) * | 1993-02-12 | 1997-05-06 | The Cleveland Clinic Foundation | Bone transport and lengthening system |
| US5536269A (en) * | 1993-02-18 | 1996-07-16 | Genesis Orthopedics | Bone and tissue lengthening device |
| US5350379A (en) * | 1993-02-18 | 1994-09-27 | Genesis Orthopedics | Bone and tissue lengthening device |
| US5356411A (en) * | 1993-02-18 | 1994-10-18 | Spievack Alan R | Bone transporter |
| US5505733A (en) * | 1993-10-22 | 1996-04-09 | Justin; Daniel F. | Intramedullary skeletal distractor and method |
| US5415660A (en) * | 1994-01-07 | 1995-05-16 | Regents Of The University Of Minnesota | Implantable limb lengthening nail driven by a shape memory alloy |
| FR2730406B1 (fr) * | 1995-02-13 | 1997-08-14 | Medinov Sa | Dispositif d'allongement perfectionne d'os longs |
| US5626581A (en) * | 1995-11-27 | 1997-05-06 | Volunteers For Medical Engineering | Implantable bone lengthening apparatus |
| US5704938A (en) * | 1996-03-27 | 1998-01-06 | Volunteers For Medical Engineering | Implantable bone lengthening apparatus using a drive gear mechanism |
| US6835207B2 (en) | 1996-07-22 | 2004-12-28 | Fred Zacouto | Skeletal implant |
| NL1004873C2 (nl) * | 1996-12-23 | 1998-06-24 | Univ Twente | Inrichting voor het onderling verplaatsen van twee objecten. |
| US5827286A (en) | 1997-02-14 | 1998-10-27 | Incavo; Stephen J. | Incrementally adjustable tibial osteotomy fixation device and method |
| US6033412A (en) * | 1997-04-03 | 2000-03-07 | Losken; H. Wolfgang | Automated implantable bone distractor for incremental bone adjustment |
| DE19829523A1 (de) * | 1998-07-02 | 2000-01-05 | Michael Butsch | Distraktionsvorrichtung zum Auseinanderbewegen eines ein- oder zweiteiligen, ggf. getrennten Knochens |
| DE19906423A1 (de) * | 1999-02-16 | 2000-08-17 | Wittenstein Gmbh & Co Kg | Aktiver Marknagel zur Distraktion von Knochenteilen |
| DE19908851A1 (de) * | 1999-03-01 | 2000-09-07 | Rainer Baumgart | Marknagel zur Knochendistraktion |
| US6673079B1 (en) * | 1999-08-16 | 2004-01-06 | Washington University | Device for lengthening and reshaping bone by distraction osteogenesis |
| US6474341B1 (en) * | 1999-10-28 | 2002-11-05 | Surgical Navigation Technologies, Inc. | Surgical communication and power system |
| JP4175899B2 (ja) * | 2001-05-23 | 2008-11-05 | オーソゴン テクノロジーズ 2003 リミテッド | 磁気駆動可能な髄内装置 |
| DE10156316A1 (de) * | 2001-11-19 | 2003-06-05 | Wittenstein Ag | Distraktionsvorrichtung |
| IL147783A0 (en) * | 2002-01-23 | 2002-08-14 | Disc O Tech Medical Tech Ltd | Locking mechanism for intramedulliary nails |
| US7060075B2 (en) * | 2002-07-18 | 2006-06-13 | Biosense, Inc. | Distal targeting of locking screws in intramedullary nails |
| US20090062886A1 (en) * | 2002-12-09 | 2009-03-05 | Ferro Solutions, Inc. | Systems and methods for delivering electrical energy in the body |
| US6918910B2 (en) * | 2002-12-16 | 2005-07-19 | John T. Smith | Implantable distraction device |
| US20050234448A1 (en) * | 2004-03-19 | 2005-10-20 | Mccarthy James | Implantable bone-lengthening device |
| US7531002B2 (en) * | 2004-04-16 | 2009-05-12 | Depuy Spine, Inc. | Intervertebral disc with monitoring and adjusting capabilities |
| US7955357B2 (en) * | 2004-07-02 | 2011-06-07 | Ellipse Technologies, Inc. | Expandable rod system to treat scoliosis and method of using the same |
| GB0417005D0 (en) * | 2004-07-29 | 2004-09-01 | Finsbury Dev Ltd | Auto-extensible device |
| US7559951B2 (en) * | 2004-09-30 | 2009-07-14 | Depuy Products, Inc. | Adjustable, remote-controllable orthopaedic prosthesis and associated method |
| US20060235424A1 (en) * | 2005-04-01 | 2006-10-19 | Foster-Miller, Inc. | Implantable bone distraction device and method |
| US7312162B2 (en) * | 2005-05-17 | 2007-12-25 | Applied Materials, Inc. | Low temperature plasma deposition process for carbon layer deposition |
| US8187327B2 (en) * | 2005-05-18 | 2012-05-29 | Kyphon Sarl | Selectively-expandable bone scaffold |
| US20070005146A1 (en) * | 2005-06-30 | 2007-01-04 | Howmedica Osteonics Corp. | Hip stem for receiving intramedullary nail |
| US7479608B2 (en) * | 2006-05-19 | 2009-01-20 | Ethicon Endo-Surgery, Inc. | Force switch |
| EP1912570B1 (en) * | 2005-07-27 | 2014-10-08 | Covidien LP | Shaft, e.g., for an electro-mechanical surgical device |
| JP2007202843A (ja) * | 2006-02-02 | 2007-08-16 | Junkaku Lee | 四肢伸延装置 |
| FR2901991B1 (fr) * | 2006-06-13 | 2021-07-09 | Arnaud Andre Soubeiran | Dispositif d'allongement intracorporel a vis montee en traction |
| FR2906453B1 (fr) * | 2006-10-03 | 2009-03-06 | Arnaud Andre Soubeiran | Dispositif d'allongement intra-corporel a aimant permanent. |
| US20080108995A1 (en) * | 2006-11-06 | 2008-05-08 | Janet Conway | Internal bone transport |
| US8043299B2 (en) * | 2006-11-06 | 2011-10-25 | Janet Conway | Internal bone transport |
| US20100318085A1 (en) * | 2007-03-13 | 2010-12-16 | Smith & Nephew, Inc. | Internal fixation devices |
| US7753915B1 (en) * | 2007-06-14 | 2010-07-13 | August Eksler | Bi-directional bone length adjustment system |
| US8506566B2 (en) * | 2007-07-30 | 2013-08-13 | John Peter Karidis | Adjustable length strut apparatus for orthopaedic applications |
| WO2009046024A1 (en) * | 2007-10-01 | 2009-04-09 | Physical Sciences, Inc. | Distraction osteogenesis methods and devices |
| US20090112262A1 (en) * | 2007-10-30 | 2009-04-30 | Scott Pool | Skeletal manipulation system |
| FI123247B (fi) | 2008-03-19 | 2013-01-15 | Aalto Korkeakoulusaeaetioe | Kehon sisäinen luudistraktiolaite |
| JP2012504387A (ja) * | 2008-09-27 | 2012-02-16 | ウィトリシティ コーポレーション | 無線エネルギー伝達システム |
| US20100094303A1 (en) * | 2008-10-13 | 2010-04-15 | Arvin Chang | Spinal distraction system |
| CN102271601B (zh) * | 2008-10-31 | 2016-06-29 | 米卢克斯控股股份有限公司 | 利用无线能量传输进行骨调整的装置 |
| US8382756B2 (en) * | 2008-11-10 | 2013-02-26 | Ellipse Technologies, Inc. | External adjustment device for distraction device |
| ES2761267T3 (es) * | 2009-09-04 | 2020-05-19 | Nuvasive Specialized Orthopedics Inc | Dispositivo de crecimiento óseo |
| EP2485685A4 (en) * | 2009-10-10 | 2015-11-04 | Simplicity Orthopedics Inc | METHOD AND DEVICE FOR RECONSTRUCTING A JOINT, INCLUDING PROVISION AND USE OF A LENGTH-ADJUSTABLE AND TURN-ADJUSTABLE JOINT PROSTHESIS |
| US8777947B2 (en) * | 2010-03-19 | 2014-07-15 | Smith & Nephew, Inc. | Telescoping IM nail and actuating mechanism |
| FR2957776B1 (fr) * | 2010-03-23 | 2013-02-15 | Arnaud Andre Soubeiran | Dispositif de deplacement de tissus a l'interieur de l'organisme, notamment de tissus osseux, a vis travaillant en traction fixe et ecrou tournant |
| WO2012021378A2 (en) * | 2010-08-09 | 2012-02-16 | Ellipse Technologies, Inc. | Maintenance feature in magnetic implant |
| WO2012112396A2 (en) * | 2011-02-14 | 2012-08-23 | Ellipse Technologies, Inc. | Device and method for treating fractured bones |
| BR112013029376A2 (pt) * | 2011-05-16 | 2017-01-31 | Smith & Nephew Inc | medição de extensão do esqueleto |
| US9308089B2 (en) * | 2011-06-27 | 2016-04-12 | University Of Cape Town | Endoprosthesis |
| JP2014533965A (ja) * | 2011-07-19 | 2014-12-18 | イルミンオス・メディカル・インコーポレイテッドIlluminOss Medical, Inc. | 骨の再構築および安定化のための装置および方法 |
| US9078711B2 (en) * | 2012-06-06 | 2015-07-14 | Ellipse Technologies, Inc. | Devices and methods for detection of slippage of magnetic coupling in implantable medical devices |
| US9044281B2 (en) * | 2012-10-18 | 2015-06-02 | Ellipse Technologies, Inc. | Intramedullary implants for replacing lost bone |
| EP2911616B1 (en) * | 2012-10-29 | 2020-10-07 | NuVasive Specialized Orthopedics, Inc. | Adjustable devices for treating arthritis of the knee |
| US9179938B2 (en) * | 2013-03-08 | 2015-11-10 | Ellipse Technologies, Inc. | Distraction devices and method of assembling the same |
| US10137024B2 (en) * | 2013-04-08 | 2018-11-27 | Elwha Llc | Apparatus, system, and method for controlling movement of an orthopedic joint prosthesis in a mammalian subject |
| JP6636420B2 (ja) * | 2013-10-11 | 2020-01-29 | ニューヴェイジヴ,インコーポレイテッド | 骨整形用の装置および方法 |
| ES2617556T3 (es) * | 2014-03-06 | 2017-06-19 | Mps Micro Precision Systems Ag | Dispositivo implantable |
| DE102014112573A1 (de) * | 2014-09-01 | 2016-03-03 | Wittenstein Ag | Marknagel |
| WO2016065205A1 (en) * | 2014-10-23 | 2016-04-28 | Ellipse Technologies, Inc. | Remotely adjustable interactive bone reshaping implant |
| AU2015371247B2 (en) * | 2014-12-26 | 2020-06-04 | Nuvasive Specialized Orthopedics, Inc. | Systems and methods for distraction |
| CA2917676A1 (en) * | 2015-01-13 | 2016-07-13 | Stryker European Holdings I, Llc | Growing rods and methods of use |
| DE102015109624A1 (de) * | 2015-06-16 | 2016-12-22 | Wittenstein Se | Mechatronisches Implantat |
| WO2017066774A1 (en) * | 2015-10-16 | 2017-04-20 | Nuvasive Specialized Orthopedics, Inc. | Adjustable devices for treating arthritis of the knee |
| ES2879405T3 (es) * | 2016-01-28 | 2021-11-22 | Nuvasive Specialized Orthopedics Inc | Sistemas para transporte óseo |
| WO2017181174A1 (en) * | 2016-04-15 | 2017-10-19 | Arthrex, Inc. | Arthrodesis devices for generating and applying compression within joints |
| FI20165445A (fi) * | 2016-05-27 | 2017-11-28 | Synoste Oy | Kehon sisäinen teleskooppinen osteodistraktiolaite, kehon ulkoinen tehoa tuottava laite, menetelmä luunpidennystä varten ja luunpidennysjärjestely |
| US10722278B2 (en) * | 2017-10-06 | 2020-07-28 | Smith & Nephew, Inc. | Implantable bone adjustment devices |
-
2009
- 2009-10-29 CN CN200980153587.7A patent/CN102271601B/zh active Active
- 2009-10-29 EP EP21175325.6A patent/EP3906872A1/en active Pending
- 2009-10-29 BR BRPI0919860A patent/BRPI0919860B8/pt active IP Right Grant
- 2009-10-29 CN CN201610320491.7A patent/CN105943145B/zh active Active
- 2009-10-29 EP EP09823911.4A patent/EP2367487B1/en active Active
- 2009-10-29 WO PCT/SE2009/051233 patent/WO2010050891A1/en active Application Filing
- 2009-10-29 JP JP2011534449A patent/JP2012507340A/ja active Pending
- 2009-10-29 CA CA2776500A patent/CA2776500A1/en not_active Abandoned
- 2009-10-29 WO PCT/SE2009/051232 patent/WO2010050890A1/en active Application Filing
- 2009-10-29 AU AU2009310439A patent/AU2009310439B2/en active Active
- 2009-10-29 US US13/123,536 patent/US9962199B2/en active Active
- 2009-10-29 US US13/123,537 patent/US10064664B2/en active Active
- 2009-10-29 EP EP09823910.6A patent/EP2367486A4/en active Pending
-
2016
- 2016-05-13 AU AU2016203133A patent/AU2016203133B2/en active Active
-
2018
- 2018-02-23 AU AU2018201335A patent/AU2018201335B2/en active Active
- 2018-05-08 US US15/973,551 patent/US11065041B2/en active Active
- 2018-09-03 US US16/120,385 patent/US20190175231A1/en active Pending
-
2020
- 2020-01-03 AU AU2020200055A patent/AU2020200055B2/en active Active
-
2021
- 2021-07-01 US US17/365,116 patent/US20210393301A1/en active Pending
- 2021-08-13 AU AU2021215271A patent/AU2021215271A1/en not_active Abandoned
-
2023
- 2023-09-14 AU AU2023229543A patent/AU2023229543A1/en active Pending
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| AU2020200055B2 (en) | Device and Method For Bond Adjustment | |
| KR102559778B1 (ko) | 원격으로 조정 가능한 상호작용적 뼈 재성형 임플란트 | |
| US9095437B2 (en) | Adjustable orthopedic implant and method for treating an orthopedic condition in a subject | |
| US11890043B2 (en) | Systems and methods for distraction | |
| US11963705B2 (en) | Systems and methods for distraction | |
| Kosashvili et al. | Emerging Intramedullary Bone-Lengthening Technologies |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| TA01 | Transfer of patent application right | ||
| TA01 | Transfer of patent application right |
Effective date of registration: 20190806 Address after: Ma Er Tashengguaan Applicant after: IMPLANTICA PATENTS CO., LTD. Address before: Luxemburg Luxemburg Applicant before: Milutinovic, Alex Holdings Ltd. |
|
| GR01 | Patent grant | ||
| GR01 | Patent grant |