CN102887440A - 多功能智能随车旋挖起重机 - Google Patents
多功能智能随车旋挖起重机 Download PDFInfo
- Publication number
- CN102887440A CN102887440A CN2012104301441A CN201210430144A CN102887440A CN 102887440 A CN102887440 A CN 102887440A CN 2012104301441 A CN2012104301441 A CN 2012104301441A CN 201210430144 A CN201210430144 A CN 201210430144A CN 102887440 A CN102887440 A CN 102887440A
- Authority
- CN
- China
- Prior art keywords
- assembly
- bearing pin
- connecting rod
- swing arm
- stick shaker
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 32
- 229910000831 Steel Inorganic materials 0.000 claims abstract description 5
- 239000010959 steel Substances 0.000 claims abstract description 5
- 239000000725 suspension Substances 0.000 claims description 5
- 239000000203 mixture Substances 0.000 claims 1
- 238000010276 construction Methods 0.000 abstract description 5
- 230000008901 benefit Effects 0.000 abstract description 3
- 239000010720 hydraulic oil Substances 0.000 abstract 1
- 239000003921 oil Substances 0.000 abstract 1
- 238000000034 method Methods 0.000 description 10
- 230000009471 action Effects 0.000 description 7
- 230000005540 biological transmission Effects 0.000 description 3
- 238000013461 design Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000006978 adaptation Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 239000002828 fuel tank Substances 0.000 description 1
- -1 gardens Substances 0.000 description 1
- 235000021472 generally recognized as safe Nutrition 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000012827 research and development Methods 0.000 description 1
- 239000004575 stone Substances 0.000 description 1
Images




Landscapes
- Earth Drilling (AREA)
Abstract
一种多功能智能随车旋挖起重机,包括立柱总成、吊臂总成、液压油箱总成、钢丝绳、后支腿总成、吊钩总成、机架总成、油泵,吊臂总成与连接座联接,动臂总成通过动臂的摆臂机构与连接座联接;抖杆总成通过抖杆的摆臂机构与动臂总成联接;快换夹头总成通过快换夹头的摆臂机构与抖杆总成联接;多作用机具分别装在快换夹头总成上或从快换夹头总成上拆下。本发明可以快速更换多种机具,实现多种功能,减少成本费用,提高工作效率,而且还能解决因场地限制无法施工的难题,安全性能好。
Description
技术领域
本发明涉及工程机械技术领域,具体涉及一种多功能智能随车旋挖起重机。可广泛应用于交通运输、土木建筑、电力电讯、野外作业,石材、园林、油田、军事、港口作业,抢险救援,远距离转运,以及桥梁检修、高空架线检测、消防安全工程等领域。
背景技术
我国目前随车起重机的现状与存在的不足如下:
1、品种少,产量低。我国现有随车起重机正处于初级发展阶段。品种单一,中小吨位重复多,至今尚未形成大、中、小完整的系列,年产量只相当于国外一个厂家的生产能力。
2、起重机力矩小,技术水平低。我国现有随车起重机以直臂卷扬为主,受国内汽车底盘的限制。起重力矩小,其它性能指标也低于国际先进产品。目前国内企业对随车起重机的研究开发投入很少,液压系统、控制系统的水平较先进技术也有一定的差距。
3、安全装置不齐全,操作不方便。我国现有随车起重机仅装有“起升高度限位”及“平衡阀”、“溢流阀”等一般安全装置,且全部为手动操作,安全装置不齐全,操作不便。
4、功能单一,工作效率低。我国现有随车起重机以起重作业运输为主。不能实现钻头旋挖、抓斗、抓具、高空作业平台、装卸机械手、拨桩器、破碎锤等多种功能。
5、外形不美观。我国随车起重机外观设计与颜色单调,忽视了与汽车外形的协调。
发明内容
本发明所要解决的技术问题是:解决上述现有技术存在的问题,而提供一种多功能智能随车旋挖起重机,可以快速更换多种机具,实现多种功能,减少成本费用,提高工作效率,而且还能解决因场地限制无法施工的难题,安全性能好。
本发明采用的技术方案是:
一种多功能智能随车旋挖起重机,包括立柱总成、吊臂总成、液压油箱总成、钢丝绳、后支腿总成、吊钩总成、机架总成、油泵,机架总成通过双头螺栓和螺母联接固定在汽车底盘的大梁上,立柱总成通过第一联接螺栓与机架总成联接固定,吊臂总成通过销轴联接在立柱总成上,钢丝绳将立柱总成中的卷筒总成与吊钩总成中的滑轮总成联接,油泵由第二联接螺栓联接到汽车底盘中的齿轮箱;吊臂总成与连接座联接,动臂总成通过动臂的摆臂机构与连接座联接;抖杆总成通过抖杆的摆臂机构与动臂总成联接;快换夹头总成通过快换夹头的摆臂机构与抖杆总成联接;多作用机具分别装在快换夹头总成上或从快换夹头总成上拆下。
上述技术方案中,所述的动臂总成通过动臂的摆臂机构与连接座联接,其具体结构为:用连接螺栓6将吊臂总成4与连接座5联接;用销轴A :8将动臂油缸7与动臂总成9联接;用销轴G:22将连杆B :21与动臂总成9联接;用销轴D :17将连杆A :18与连接座5联接,再用销轴F: 20将连杆B :21、连杆A: 18、动臂油缸7联接在一起,从而组成动臂的摆臂机构。
上述技术方案中,所述的抖杆总成通过抖杆的摆臂机构与动臂总成联接,其具体结构为:用销轴B: 10将抖杆油缸11与动臂总成9联接;用销轴K :28将抖杆总成12与动臂总成9联接;用销轴H :23将连杆C: 24与动臂总成9联接;用销轴J :27将连杆D :26与抖杆总成12联接;再用销轴I :25将连杆C :24、连杆D: 26、抖杆油缸11联接在一起,从而组成抖杆的摆臂机构。
上述技术方案中,所述的快换夹头总成通过快换夹头的摆臂机构与抖杆总成联接,其具体结构为:用销轴M :31将快换夹头总成15与抖杆总成12和连杆E: 30联接;用销轴C :13将摆臂油缸14与抖杆总成12联接;用销轴N:32将连杆F: 33与快换夹头总成15联接;再用销轴L :29将摆臂油缸14与连杆E: 30联接;再用销轴O: 34将连杆E :30与连杆F :33联接,从而组成快换夹头的摆臂机构。
上述技术方案中,所述的多作用机具16为根据工作需要可通过快换夹头总成15快速拆装所需的机具;多作用机具包括液压动力头、旋挖钻头、工作斗、抓斗、高空作业平台、抓具、吊篮、螺旋钻扳叉、装卸轮胎机械手、拨桩器、破碎锤或其他专用机具。
上述技术方案中,在汽车底盘上安装程序控制器,在吊臂总成上安装有长度传感器、角度传感器、限位开关、第二平衡阀,在立柱总成上安装上腔压力传感器、下腔压力传感器、第一平衡阀,在机架总成上安装多路阀、常开电磁阀、倾角传感器、油温传感器、中心回转滑环、报警器,程序控制器与canbus总线联接,Canbus总线通过中心回转滑环分别连接长度传感器、角度传感器、上腔压力传感器、下腔压力传感器、限位开关,机架下部的油温传感器、倾角传感器、常开电磁阀、报警器分别由canbus总线中的相应分线连接。
上述技术方案中,所述的程序控制器的输入端分别连接限位开关、长度传感器、角度传感器、上腔压力传感器、下腔压力传感器、油温传感器、倾角传感器、数据编程输入、记录数据储存,程序控制器输出端分别连接各继电器、显示器、系统正常工作指示灯、系统故障指示灯、报警器;各继电器分别控制电磁阀,各电磁阀分别控制液压多路阀,各液压多路阀分别控制卷扬马达、伸缩油缸、变幅油缸,而卷扬马达控制卷扬升降,伸缩油缸控制臂架伸缩,变幅油缸控制变幅升降;上述限位开关通过继电器、电磁阀、液压多路阀连接控制卷扬马达,实现吊钩收放和卷扬升降。
上述技术方案中,在汽车底盘上还安装有电液控制加油装置,电液控制加油装置由电控手柄、控制电路和液压系统构成,电控手柄上安装有加油按钮、减油按钮和急停开关,控制电路包括加油继电器、减油继电器电路及其控制的电磁换向阀电路,减压系统包括依次连接的油箱、油泵、电磁换向阀、油缸、传动机构、油门线总成,电控手柄上安装的加油按钮、减油按钮和急停开关连接控制加油继电器和减油继电器,加油继电器和减油分别连接控制电磁换向阀,电磁换向阀通过油缸、传动机构连接传动油门线总成。
上述技术方案中,所述的加油继电器包括变幅加油继电器、伸缩加油继电器、回转加油继电器和卷扬加油继电器,所述的减油继电器包括变幅减油继电器,伸缩减油继电器、回转减油继电器和卷扬减油继电器,所述的电磁换向阀包括变幅换向电磁阀、伸缩换向电磁阀、回转换向电磁阀和卷扬换向电磁阀。
本发明的有益效果:
目前,我国随车起重机以起重运输作业为主,功能单一,工作效率低。许多私人车主经常性的用不规范操作来实现其它功能,不仅工作效率低,而且存在很大的安全隐患,而多功能智能随车旋挖起重机安全性强、功能齐全、操作方便等一系列优点弥补了我国传统的随车起重机的多方面的缺陷。例如,要移栽一颗苗木或电线杆,一般都必须配备一台挖掘机或钻机、一台起重机、若干人工才能完成,费时,费力,不安全,而且成本高。而一台多功能智能随车旋挖起重机就可实现原先两台乃至三、四台工程车才能实现的功能,因为多功能智能随车旋挖起重机可以快速更换多种机具,实现多种功能,不仅减少了成本费用,提高了工作效率,而且还解决了因受工作场地限制而不能停放太多工程机械的难题,因此多功能智能随车旋挖起重机,具有极大性能优越性,能给用户带来很大的安全保障以及良好的社会和经济效益。
附图说明
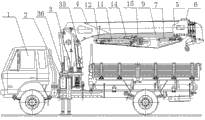
图1为本发明全展开状态结构示意图;
图2为图1中Ⅰ放大图;
图3为图1中Ⅱ放大图;
图4为图1中Ⅲ放大图;
图5为本发明全收回状态结构示意图;
图6为本发明展开过程示意图。
附图标注说明:
1-汽车底盘,2-机架总成,3-立柱总成,4-吊臂总成,5-连接座,6-连接螺栓,7-动臂油缸,8-销轴A,9-动臂总成,10-销轴B,11-抖杆油缸,12-抖杆总成,13-销轴C,14-摆臂油缸,15-快换夹头总成,16-多作用机具,17-销轴D,18-连杆A,19-销轴E,20-销轴F,21-连杆B,22-销轴G,23-销轴H,24-连杆C,25-销轴I,26-连杆D,27-销轴J,28-销轴K,29-销轴L,30-连杆E,31-销轴M,32-销轴N,33-连杆F,34-销轴O,35-变幅油缸,36-控制系统。
具体实施方式
参见附图,本发明的多功能智能随车旋挖起重机各部件安装及连接关系如下:
用连接螺栓6将吊臂总成4与连接座5联接;用销轴A :8将动臂油缸7与动臂总成9联接;用销轴G :22将连杆B :21与动臂总成9联接;用销轴D: 17将连杆A :18与连接座5联接;再用销轴F: 20将连杆B :21、连杆A:18、动臂油缸7联接在一起,从而组成动臂的摆臂机构。
用销轴B :10将抖杆油缸11与动臂总成9联接;用销轴K :28将抖杆总成12与动臂总成9联接;用销轴H :23将连杆C: 24与动臂总成9联接;用销轴J :27将连杆D: 26与抖杆总成12联接;再用销轴I: 25将连杆C: 24、连杆D :26、抖杆油缸11联接在一起,从而组成抖杆的摆臂机构。
用销轴M:31将快换夹头总成15与抖杆总成12和连杆E :30联接;用销轴C: 13将摆臂油缸14与抖杆总成12联接;用销轴N:32将连杆F: 33与快换夹头总成15联接;再用销轴L :29将摆臂油缸14与连杆E: 30联接;再用销轴O :34将连杆E :30与连杆F: 33联接,从而组成快换夹头的摆臂机构。
多作用机具16根据工作需要可通过快换夹头总成15快速拆装所需机具;多作用机具包括液压动力头、旋挖钻头、工作斗、抓斗、高空作业平台、抓具、吊篮、螺旋钻扳叉、装卸轮胎机械手、拨桩器、破碎锤及其他专用机具。
工作原理:
当不工作时,多功能智能随车旋挖起重机为全收回状态,如图5所示(当不工作且多功能智能随车起重机在全收回状态前,需将多作用机具15卸下,以减轻空载的自重和减少空载时所占用的空间);当工作时,动臂总成9与抖杆总成12都需展开成适应的工作角度。以下为多功能智能随车旋挖起重机由全收回状态(图5)向全展开状态(图1)动作的简要说明,如展开示意图(图6)所示:
1、动臂总成9的摆动:当打开相应的液压换向阀时,变幅油缸35伸出,将吊臂总成4仰起一定角度(能使动臂能摆出的角度)。由上述连接关系得知动臂摆臂机构是由连杆A :18、连杆B: 21、销轴D :17、销轴E :19、销轴F: 20、销轴G :22、动臂总成9、动臂油缸7等零、部件组成的。当打开相应的液压换向阀时,动臂油缸7伸出,动臂摆臂机构动作,带动动臂总成9绕销轴E:19的轴心摆动,当动臂油缸7伸至最长行程时,动臂摆臂机构停止动作,此时动臂总成9呈最大摆出角度。反之动臂总成9收回。根据不同工况要求,动臂总成9可在摆动范围内调整摆动位置。
2、抖杆总成12的摆动:由上述连接关系得知抖杆摆臂机构是由连杆C :24、连杆D: 26、销轴H :23、销轴I :25、销轴J: 27、销轴K :28、抖杆总成12、抖杆油缸11等零、部件组成的。当打开相应的液压换向阀时,抖杆油缸11伸出,抖杆摆臂机构动作,带动抖杆总成12绕销轴K: 28轴心摆动,当抖杆油缸11伸至最长行程时,抖杆摆臂机构停止动作,此时抖杆总成12呈最大摆出角度。反之抖杆总成12收回。根据不同工况要求,抖杆总成12可在摆动范围内调整摆动位置。
3、快换夹头总成15摆动:因为快换夹头总成与施工点距离较近,主要作用是多作用机具对施工点位置的微调,所以设计快换夹头总成只呈微摆(左右各30°)。由上述连接关系得知快换夹头总成摆臂机构是由连杆E :30、连杆F: 33、销轴L :29、销轴M: 31、销轴N :32、快换夹头总成15、摆臂油缸14等零、部件组成的。当打开相应的液压换向阀时,摆臂油缸14伸出或缩回,快换夹头摆臂机构动作,带动快换夹头总成15绕销轴M:31轴心摆动;当打开相应的液压换向阀时,由高压液压油驱动液压动力头或者其他液压执行元件,从而实现旋挖钻头的旋转,或者分别实现抓斗、高空作业平台、抓具、吊篮、螺旋钻扳叉、装卸轮胎机械手、拨桩器、破碎锤以及其他专用机具的动作。
Claims (5)
1.一种多功能智能随车旋挖起重机,包括立柱总成、吊臂总成、液压油箱总成、钢丝绳、后支腿总成、吊钩总成、机架总成、油泵,机架总成通过双头螺栓和螺母联接固定在汽车底盘的大梁上,立柱总成通过第一联接螺栓与机架总成联接固定,吊臂总成通过销轴联接在立柱总成上,钢丝绳将立柱总成中的卷筒总成与吊钩总成中的滑轮总成联接,油泵由第二联接螺栓联接到汽车底盘中的齿轮箱;其特征在于:吊臂总成与连接座联接,动臂总成通过动臂的摆臂机构与连接座联接;抖杆总成通过抖杆的摆臂机构与动臂总成联接;快换夹头总成通过快换夹头的摆臂机构与抖杆总成联接;多作用机具分别装在快换夹头总成上或从快换夹头总成上拆下。
2.根据权利要求1所述的多功能智能随车旋挖起重机,其特征在于:所述的动臂总成通过动臂的摆臂机构与连接座联接,其具体结构为:用连接螺栓(6)将吊臂总成(4)与连接座(5)联接;用销轴A (8)将动臂油缸(7)与动臂总成(9)联接;用销轴G(22)将连杆B (21)与动臂总成(9)联接;用销轴D (17)将连杆A (18)与连接座(5)联接;再用销轴F (20)将连杆B (21)、连杆A (18)、动臂油缸(7)联接在一起,从而组成动臂的摆臂机构。
3.根据权利要求1所述的多功能智能随车旋挖起重机,其特征在于:所述的抖杆总成通过抖杆的摆臂机构与动臂总成联接,其具体结构为:用销轴B(10)将抖杆油缸(11)与动臂总成(9)联接;用销轴K( 28)将抖杆总成(12)与动臂总成(9)联接;用销轴H(23)将连杆C(24)与动臂总成(9)联接;用销轴J (27)将连杆D( 26)与抖杆总成(12)联接;再用销轴I (25)将连杆C (24)、连杆D (26)、抖杆油缸(11)联接在一起,从而组成抖杆的摆臂机构。
4.根据权利要求1所述的多功能智能随车旋挖起重机,其特征在于:所述的快换夹头总成通过快换夹头的摆臂机构与抖杆总成联接,其具体结构为:用销轴M (31)将快换夹头总成(15)与抖杆总成(12)和连杆E (30)联接;用销轴C(13)将摆臂油缸(14)与抖杆总成(12)联接;用销轴N(32)将连杆F (33)与快换夹头总成(15)联接;再用销轴L(29)将摆臂油缸(14)与连杆E(30)联接;再用销轴O(34)将连杆E (30)与连杆F(33)联接,从而组成快换夹头的摆臂机构。
5.根据权利要求1所述的多功能智能随车旋挖起重机,其特征在于:所述的多作用机具(16)包括液压动力头、旋挖钻头、工作斗、抓斗、高空作业平台、抓具、吊篮、螺旋钻扳叉、装卸轮胎机械手、拨桩器或破碎锤。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210430144.1A CN102887440B (zh) | 2012-11-01 | 2012-11-01 | 多功能智能随车旋挖起重机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210430144.1A CN102887440B (zh) | 2012-11-01 | 2012-11-01 | 多功能智能随车旋挖起重机 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN102887440A true CN102887440A (zh) | 2013-01-23 |
| CN102887440B CN102887440B (zh) | 2014-11-05 |
Family
ID=47531148
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201210430144.1A Expired - Fee Related CN102887440B (zh) | 2012-11-01 | 2012-11-01 | 多功能智能随车旋挖起重机 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN102887440B (zh) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103174179A (zh) * | 2013-03-12 | 2013-06-26 | 中国十七冶集团有限公司 | 液压式多功能悬臂 |
| CN103193166A (zh) * | 2013-04-15 | 2013-07-10 | 徐州昊意工程机械科技有限公司 | 随车起重机破拆臂机构总成 |
| CN103991406A (zh) * | 2013-02-16 | 2014-08-20 | 济南轨道交通装备有限责任公司 | 地铁冲洗高空作业综合车 |
| CN105947904A (zh) * | 2016-06-17 | 2016-09-21 | 三河市新宏昌专用车有限公司 | 多功能抓举起重运输车 |
| CN112299328A (zh) * | 2020-10-28 | 2021-02-02 | 徐工集团工程机械有限公司 | 抢险救援车控制方法、装置及抢险救援车 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1027451A (en) * | 1961-02-07 | 1966-04-27 | Warren Hugh Payne | Improvements in boom type truckloaders |
| GB1417021A (en) * | 1972-09-22 | 1975-12-10 | Simon Eng Dudley Ltd | Access equipment |
| EP0360071A1 (en) * | 1988-09-07 | 1990-03-28 | Luigi Guidetti | Improved crane for mounting on vehicles |
| WO1992004270A1 (en) * | 1990-08-29 | 1992-03-19 | Hiab Ab | Outer-boom crane |
| CN201762745U (zh) * | 2010-08-26 | 2011-03-16 | 泰安嘉和重工机械有限公司 | 挖掘机式的多功能作业机 |
| CN202201654U (zh) * | 2011-08-08 | 2012-04-25 | 长沙桑尼重工机械有限公司 | 具有智能操作控制系统的智能随车起重机 |
| CN202897870U (zh) * | 2012-11-01 | 2013-04-24 | 长沙桑尼重工机械有限公司 | 多功能智能随车旋挖起重机 |
-
2012
- 2012-11-01 CN CN201210430144.1A patent/CN102887440B/zh not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1027451A (en) * | 1961-02-07 | 1966-04-27 | Warren Hugh Payne | Improvements in boom type truckloaders |
| GB1417021A (en) * | 1972-09-22 | 1975-12-10 | Simon Eng Dudley Ltd | Access equipment |
| EP0360071A1 (en) * | 1988-09-07 | 1990-03-28 | Luigi Guidetti | Improved crane for mounting on vehicles |
| WO1992004270A1 (en) * | 1990-08-29 | 1992-03-19 | Hiab Ab | Outer-boom crane |
| CN201762745U (zh) * | 2010-08-26 | 2011-03-16 | 泰安嘉和重工机械有限公司 | 挖掘机式的多功能作业机 |
| CN202201654U (zh) * | 2011-08-08 | 2012-04-25 | 长沙桑尼重工机械有限公司 | 具有智能操作控制系统的智能随车起重机 |
| CN202897870U (zh) * | 2012-11-01 | 2013-04-24 | 长沙桑尼重工机械有限公司 | 多功能智能随车旋挖起重机 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103991406A (zh) * | 2013-02-16 | 2014-08-20 | 济南轨道交通装备有限责任公司 | 地铁冲洗高空作业综合车 |
| CN103991406B (zh) * | 2013-02-16 | 2016-05-04 | 济南轨道交通装备有限责任公司 | 地铁冲洗高空作业综合车 |
| CN103174179A (zh) * | 2013-03-12 | 2013-06-26 | 中国十七冶集团有限公司 | 液压式多功能悬臂 |
| CN103174179B (zh) * | 2013-03-12 | 2015-03-11 | 中国十七冶集团有限公司 | 液压式多功能悬臂 |
| CN103193166A (zh) * | 2013-04-15 | 2013-07-10 | 徐州昊意工程机械科技有限公司 | 随车起重机破拆臂机构总成 |
| CN105947904A (zh) * | 2016-06-17 | 2016-09-21 | 三河市新宏昌专用车有限公司 | 多功能抓举起重运输车 |
| CN112299328A (zh) * | 2020-10-28 | 2021-02-02 | 徐工集团工程机械有限公司 | 抢险救援车控制方法、装置及抢险救援车 |
| CN112299328B (zh) * | 2020-10-28 | 2022-03-11 | 徐工集团工程机械有限公司 | 抢险救援车控制方法、装置及抢险救援车 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102887440B (zh) | 2014-11-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102887440B (zh) | 多功能智能随车旋挖起重机 | |
| CN102923584B (zh) | 具有智能操作控制系统的智能随车起重机 | |
| CN203402895U (zh) | 新型液压叉吊多用车 | |
| CN101691190B (zh) | 一种散货起重机 | |
| CN103274300B (zh) | 智能遥控随车起重机 | |
| CN202785384U (zh) | 固定式多功能机械手 | |
| CN102807165A (zh) | 固定式多功能机械手 | |
| CN103626036A (zh) | 随车起重机的操纵系统、随车起重机及随车起重运输车 | |
| CN202897870U (zh) | 多功能智能随车旋挖起重机 | |
| CN208500300U (zh) | 一种起重装置 | |
| CN201080414Y (zh) | 集装箱多用途装卸门机 | |
| CN110642147A (zh) | 随车起重机、自动展收控制装置及方法 | |
| CN103896162A (zh) | 一种船用固定杂物吊机 | |
| CN206232342U (zh) | 一种多功能汽车起重机 | |
| CN201560069U (zh) | 叉车吊 | |
| CN203558743U (zh) | 智能遥控随车起重机 | |
| CN204588517U (zh) | 蓝牙应用智能遥控随车起重机 | |
| CN203308404U (zh) | 一种复式井架智能试油修井车 | |
| CN204281119U (zh) | 行走式多功能机械手 | |
| DE2521021A1 (de) | Hydraulisch betaetigte haengetraverse | |
| CN202594665U (zh) | 多功能工程车 | |
| CN210189787U (zh) | 一种移动平台并联机器人 | |
| CN204958171U (zh) | 一种应用无线遥控液压技术的多瓣抓斗 | |
| CN103466453A (zh) | 控制起重机卷扬相对吊臂随动的方法和系统 | |
| CN209127952U (zh) | 全方位集装箱搬运车 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20170802 Address after: 410000 Hunan province Changsha Kaifu District, Sha Ping Street No. 392 building Patentee after: CHANGSHA LINGBAO INTELLIGENT MACHINE CO.,LTD. Address before: 410152 Hunan province Changsha Kaifu District, Laodaohe Town, Sha Ping Patentee before: CHANGSHA SANGNI HEAVY INDUSTRY MACHINE Co.,Ltd. |
|
| TR01 | Transfer of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20141105 |