CN102346347A - 透镜装置和用于所述透镜装置的控制方法 - Google Patents
透镜装置和用于所述透镜装置的控制方法 Download PDFInfo
- Publication number
- CN102346347A CN102346347A CN2011102103028A CN201110210302A CN102346347A CN 102346347 A CN102346347 A CN 102346347A CN 2011102103028 A CN2011102103028 A CN 2011102103028A CN 201110210302 A CN201110210302 A CN 201110210302A CN 102346347 A CN102346347 A CN 102346347A
- Authority
- CN
- China
- Prior art keywords
- lens
- image stabilization
- unit
- image
- lens unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims description 55
- 230000006641 stabilisation Effects 0.000 claims abstract description 199
- 238000011105 stabilization Methods 0.000 claims abstract description 199
- 230000003287 optical effect Effects 0.000 claims abstract description 124
- 230000033001 locomotion Effects 0.000 claims abstract description 11
- 238000012937 correction Methods 0.000 claims description 132
- 238000003860 storage Methods 0.000 claims description 33
- 230000008859 change Effects 0.000 claims description 15
- 238000003384 imaging method Methods 0.000 claims description 14
- 238000004891 communication Methods 0.000 claims description 10
- 230000008676 import Effects 0.000 claims description 4
- 230000015572 biosynthetic process Effects 0.000 claims description 2
- 230000008569 process Effects 0.000 description 43
- 238000010586 diagram Methods 0.000 description 40
- 239000012190 activator Substances 0.000 description 26
- 230000001915 proofreading effect Effects 0.000 description 24
- 239000011295 pitch Substances 0.000 description 16
- 238000012545 processing Methods 0.000 description 14
- 230000008878 coupling Effects 0.000 description 13
- 238000010168 coupling process Methods 0.000 description 13
- 238000005859 coupling reaction Methods 0.000 description 13
- 230000007246 mechanism Effects 0.000 description 11
- 230000004044 response Effects 0.000 description 11
- 230000000087 stabilizing effect Effects 0.000 description 10
- 238000006073 displacement reaction Methods 0.000 description 9
- 230000004913 activation Effects 0.000 description 7
- 238000003780 insertion Methods 0.000 description 7
- 230000037431 insertion Effects 0.000 description 7
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 6
- 230000003213 activating effect Effects 0.000 description 5
- 238000001514 detection method Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 238000009434 installation Methods 0.000 description 4
- 230000009467 reduction Effects 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 2
- 230000014759 maintenance of location Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000005764 inhibitory process Effects 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000005012 migration Effects 0.000 description 1
- 238000013508 migration Methods 0.000 description 1
- 230000005693 optoelectronics Effects 0.000 description 1
- 230000009955 peripheral mechanism Effects 0.000 description 1
Images



















Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B5/00—Adjustment of optical system relative to image or object surface other than for focusing
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0007—Movement of one or more optical elements for control of motion blur
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0046—Movement of one or more optical elements for zooming
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/681—Motion detection
- H04N23/6812—Motion detection based on additional sensors, e.g. acceleration sensors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/682—Vibration or motion blur correction
- H04N23/685—Vibration or motion blur correction performed by mechanical compensation
- H04N23/687—Vibration or motion blur correction performed by mechanical compensation by shifting the lens or sensor position
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Adjustment Of Camera Lenses (AREA)
- Studio Devices (AREA)
- Lens Barrels (AREA)
- Structure And Mechanism Of Cameras (AREA)
Abstract
本发明涉及透镜装置和用于所述透镜装置的控制方法。所述透镜装置包括:在变倍期间沿光轴方向移动的变倍透镜单元;能够沿与光轴垂直的方向移动的图像稳定化透镜单元;用于驱动图像稳定化透镜单元的图像稳定化驱动单元;和用于控制图像稳定化驱动单元对于图像稳定化透镜单元的驱动的图像稳定化控制器,其中,图像稳定化控制器控制图像稳定化驱动单元以移动图像稳定化透镜单元,以便减少在像面上的一个预定的点处形成的对象图像的位置偏离,所述位置偏离是由变倍透镜单元的移动导致的。
Description
技术领域
本发明涉及透镜装置,更具体地,涉及包含变焦机构和图像稳定化机构的透镜装置以及用于所述透镜装置的控制方法。
背景技术
日本专利申请公开No.2000-221557公开了通过移动图像稳定化透镜而在数字视频图像拾取装置中校正望远侧和广角侧的变焦位置之间的拍摄图像的位置偏离的技术,所述位置偏离是因图像拾取元件的组装误差而出现的。日本专利申请公开No.2000-221557进一步公开了还通过移动图像稳定化透镜来校正在变焦期间出现的光学透镜的光轴的位置偏离。
常规的图像拍摄装置具有以下的在其中固有的问题。
作为数字照相机或摄像机,存在这样的图像拍摄装置:在该图像拍摄装置中,通过包含光学透镜的透镜装置和包含图像拾取元件的图像拾取装置的安装(mount)部分来相互可去除地连接所述透镜装置和所述图像拾取装置,以由此允许根据图像拍摄情形来实现所述透镜装置和所述图像拾取装置的各种组合。当在各制造商处组装所述透镜装置和所述图像拾取装置时,所述透镜装置和所述图像拾取装置的光轴位置被单独地调整,并且,如果利用相同的用于所述安装部分的连接方法,那么,即使制造商不同,所述透镜装置和所述图像拾取装置也可被相互连接。当操作者根据图像拍摄情形更换透镜装置或图像拾取装置时,以及当操作者为了运输期间的更便携性而使透镜装置和图像拾取装置相互分离时,通过安装部分来安装和去除所述透镜装置与所述图像拾取装置。此时,在被单独地调整的透镜装置和图像拾取装置中,它们的光轴位置会由于调整误差或各部件的精度的误差而相互偏离。由此,当透镜装置和图像拾取装置相互连接时,在变焦的望远侧和广角侧之间会出现拍摄图像的位置偏离。如果由于调整误差或各部件的精度的误差而导致在透镜装置中在变焦期间进一步出现光轴的位置偏离,那么结果在两处出现了由不同的因素导致的位置偏离。如果出现这样的位置偏离,那么当对于对象执行变焦操作时,在表现对象的显示中出现位移的偏离。另一方面,在具有自动聚焦功能的装置的情况下,自动聚焦的距离测量点和距离测量标记不相互匹配,从而导致对焦操作方面的问题。
但是,常规的图像拍摄装置不能抑制在从各制造商装运之后在使透镜装置和图像拾取装置相互连接时出现的位置偏离。特别地,如果利用相同的用于安装部分的连接方法,那么可以使来自不同制造商的装置相互连接。在这种情况下,不能获得关于各光轴的信息,从而导致出现问题。
发明内容
鉴于以上的情况,本发明具有提供这样的透镜装置的一个示例性目的:该透镜装置能够在可去除的透镜装置和可去除的图像拾取装置的组合中简单地调整和校正由于安装误差导致的光轴的位置偏离,并且还能够对于透镜装置和图像拾取装置的非特定组合适当地校正位置偏离。
根据本发明,提供一种透镜装置,该透镜装置包括:在变倍期间沿光轴方向移动的变倍透镜单元;能够沿与光轴垂直的方向移动的图像稳定化透镜单元;用于驱动图像稳定化透镜单元的图像稳定化驱动单元;以及用于控制图像稳定化驱动单元对于图像稳定化透镜单元的驱动的图像稳定化控制器,其中,图像稳定化控制器控制图像稳定化驱动单元以移动图像稳定化透镜单元,以便减少在像面上的一个预定点处形成的对象图像的位置偏离,该位置偏离是由变倍透镜单元的移动导致的。
根据本发明,提供一种用于透镜装置的控制方法,所述透镜装置包括:在变倍期间沿光轴方向移动的变倍透镜单元,能够沿与光轴垂直的方向移动的图像稳定化透镜单元,用于驱动图像稳定化透镜单元的图像稳定化驱动单元,以及用于控制图像稳定化驱动单元对于图像稳定化透镜单元的驱动的图像稳定化控制器,所述方法包括:由所述图像稳定化驱动单元驱动所述图像稳定化透镜单元向基准位置移动;通过检测至少两个变倍位置,获取校正偏移量,所述校正偏移量是用于驱动图像稳定化透镜单元以防止发生由变倍透镜单元的移动而导致的、在像面上的一个预定的点处形成的对象图像的位置偏离的移动量;由所述图像稳定化控制器基于所述校正偏移量来控制图像稳定化驱动单元以移动图像稳定化透镜单元,以便减小所述位置偏离。
(参照附图)阅读示例性实施例的以下描述,本发明的其它特征将变得清晰。
根据本发明,可以提供这样的透镜装置:该透镜装置能够在可去除的透镜装置和可去除的图像拾取装置的组合中简单地调整和校正由于安装误差导致的光轴的位置偏离,并且还能够对于透镜装置和图像拾取装置的非特定组合适当地校正位置偏离。
参照附图阅读示例性实施例的以下描述,本发明的其它特征将变得清晰。
附图说明
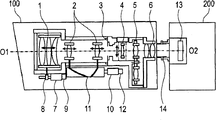
图1是示出根据本发明的透镜装置的概要的示意图。
图2是示出根据本发明的透镜装置的图像稳定化单元的概要的示意图。
图3是示出根据本发明的第三到第五实施例的透镜装置的切换单元的配置的示意图。
图4A和4B是示出根据本发明的透镜装置的操作部分的配置的图。
图5是示出根据本发明的透镜装置、图像拾取装置和外围装置的控制块的配置的框图。
图6是示出存在当透镜装置和图像拾取装置相互连接时的光轴的位置偏离的状态的说明图。
图7是在透镜装置和图像拾取装置相互连接之后在十字形对象上实现对焦状态时的波形监视器上的图像的示例。
图8是示出在存在由于透镜装置和图像拾取装置的安装误差导致的光轴的位置偏离的情况下的标记中心从望远端向广角端的移动的图。
图9是根据本发明的第一实施例的在存在由于透镜装置和图像拾取装置的安装误差导致的光轴的位置偏离的情况下执行的校正的流程图。
图10是根据本发明的第一实施例的在校正之后执行的处理的流程图。
图11是示出在存在透镜装置的变焦期间的光轴的位置偏离的情况下的标记中心从望远端到广角端的轨迹的图。
图12是根据本发明的第二实施例的在存在透镜装置的变焦期间的光轴的位置偏离的情况下执行的校正的流程图。
图13是根据本发明的第二实施例的在存在由于透镜装置和图像拾取装置的安装误差导致的光轴的位置偏离的情况下执行的校正的流程图。
图14是根据本发明的第二实施例的在校正之后执行的处理的流程图。
图15是示出在存在依赖于要被插入光路中的光学切换单元的光学透镜的光轴的位置偏离的情况下的标记中心从望远端到广角端的轨迹的图。
图16是根据本发明的第三实施例的在存在依赖于要被插入光路中的光学切换单元的光学透镜的光轴的位置偏离的情况下执行的校正的流程图。
图17是根据本发明的第三实施例的在存在由于透镜装置和图像拾取装置的安装误差导致的光轴的位置偏离的情况下执行的校正的流程图。
图18是根据本发明的第三实施例的在校正之后执行的处理的流程图。
图19是示出在存在透镜装置的变焦期间的光轴的位置偏离的情况下和在存在依赖于要被插入光路中的光学切换单元的光学透镜的光轴的位置偏移的情况下的标记中心从望远端到广角端的轨迹的图。
图20是根据本发明的第四实施例当切换透镜装置的光学切换单元的光学透镜时存在变焦期间的光轴的位置偏离的情况下执行的校正的流程图。
图21是根据本发明的第四实施例当切换透镜装置的光学切换单元的光学透镜时存在由于透镜装置和图像拾取装置的安装误差导致的光轴的位置偏离的情况下执行的校正的流程图。
图22是示出根据本发明的第五实施例的图像拍摄装置的概要的示意图。
图23是表示根据本发明的第五实施例的校正列表的概要的表。
图24是根据本发明的第五实施例的校正的流程图。
具体实施方式
以下参照附图详细描述本发明的示例性实施例。
图1是示出具有本发明的配置的透镜装置的内部的概要的示意图。
参照图1,透镜装置100包括在内部依次布置的光学单元,具体地,透镜装置100从前侧(从物侧)依次包括:聚焦透镜单元1、变焦透镜组2、虹膜机构3、图像稳定化透镜单元4、包含多个光学透镜单元的光学切换单元5、以及中继透镜单元6。
聚焦透镜单元1通过马达7和直进(rectilinear)驱动机构8沿透镜光轴O1的方向移动以调整焦点。此外,马达7具有用于测量聚焦透镜单元1的位置的焦点位置传感器9。
变焦透镜组2是能够改变焦距的透镜单元,并且可沿光轴方向移动。变焦透镜组包含在变倍期间(在变焦期间)沿光轴方向移动的两个透镜单元(变化器(variator)(与物侧对应的前侧)和补偿器(与像面侧对应的后侧))。通过用作变倍驱动单元的马达10经由凸轮轴(cam shaft)11沿光轴方向驱动这些透镜单元。此外,马达10具有用于测量变焦透镜组2的位置的变焦位置传感器12。
虹膜机构3由多个孔径叶片(aperture blade)(未示出)构成,并且,通过使用驱动机构(未示出)调整由孔径叶片形成的孔径光阑直径,以由此改变孔径光阑直径。
图像稳定化透镜单元4可通过后面描述的用作图像稳定化驱动单元的驱动机构沿与光轴O1垂直的方向移动。图像稳定化透镜单元4沿这样的方向移动以抑制当透镜装置100受到来自该装置外部的振动影响时的拍摄图像的模糊。光学切换单元5包含变倍比不同的多个透镜单元,并且,各透镜单元被固定到光学切换单元5上,以通过后面描述的旋转机构被可去除地插入图像拍摄光路中,这使得能够根据插入图像拍摄光路中的透镜单元的变倍比而将倍率变为预定的值。
透镜装置100通过安装部分14与包含图像拾取元件13的图像拾取装置200连接。安装部分14是在镜头可互换类型的单镜头反射式照相机或摄像机中使用的已知的透镜安装,并且相互可去除地连接透镜装置100和图像拾取装置200。在连接时,透镜装置100和图像拾取装置200相互连接,使得透镜光轴O1变得与位于图像拾取元件的扫描中心处的照相机光轴O2共轴。图像拾取元件13通过透镜装置100的各光学透镜从对象接收光束。注意,安装部分14可组合连接具有相同的安装形状的其它的透镜装置和图像拾取装置。
以下参照图2描述图像稳定化透镜单元4的配置。
图2是示出从图1的右侧观察的图像稳定化透镜单元4及其外围机构的图。图像稳定化透镜单元4被保持框架15保持,并且,保持框架15通过两个节距(pitch)方向滑动单元17与引导臂16连接,以便能够沿Y方向(即,节距方向)滑动。另外,引导臂16通过两个偏航(yaw)方向滑动单元19与基座18连接,以便能够沿X方向(即,偏航方向)滑动。此外,保持框架15具有线圈20和线圈21,并且,线圈20和21分别与磁化的磁体22和23相对。
磁体22和23作为磁轭(yoke)分别被固定到基座18上。当向线圈20和21供给电力时,磁场被产生并且与相对的磁体22和23的磁场组合以分别产生电磁力。通过线圈20和磁体22,Y方向(上下方向)(即,节距方向)上的电磁力根据线圈20的电流的方向而作用,并且,图像稳定化透镜单元4和保持框架15通过节距方向滑动单元17沿节距方向被驱动。类似地,通过线圈21和磁体23,X方向(左右方向)(即,偏航方向)上的电磁力根据线圈21的电流的方向而作用,并且,图像稳定化透镜单元4和保持框架15通过偏航方向滑动单元19沿偏航方向被驱动。此外,保持框架15具有用于检测保持框架15的移动位置的偏航方向位置传感器24和节距方向位置传感器25。此外,基座18具有分别用于检测因节距方向和偏航方向上的振动而产生的角速度的陀螺仪26和27。
以下参照图3描述光学切换单元5的内部配置。
图3是示出从图1的右侧观察的光学切换单元5的图。在旋转板28上,布置有用作变倍光学系统的变倍透镜单元29和30以及质量基本上与各透镜单元相同的配重31(weight),变倍透镜单元29和30以及配重31关于旋转板28的中心基本上等角度地以120°被布置。
在图3的状态中,变倍透镜单元29被移动(插入)到图像拍摄光路中。在旋转板28的圆周上,布置有用于使旋转板28旋转的切换驱动器32和用于检测旋转板28的旋转位置的旋转位置传感器33。当通过切换驱动器32使旋转板28旋转时,旋转板28以旋转板28的中心为旋转中心进行旋转,并且,执行正向旋转和反向旋转两者,结果是变倍透镜单元29和30分别被插入图像拍摄光路中。此时,配重31用作旋转中心被设为重心的平衡器(balancer),以由此抑制旋转期间的旋转不均。
以下参照图4A和图4B描述透镜装置100的操作部分的配置。
图4A和图4B分别是作为顶视图和侧视图示出具有本发明的配置的透镜装置100的变焦操作部分300的示意图。在图4A中,设置变焦操作环34、变倍开关35、图像稳定化激活开关36和操作臂37。此外,在图4B中,设置校正激活开关38、预设开关39和方向开关40。变焦操作环34可关于被设为由图4A和图4B的点划线表示的中心线的旋转轴旋转,以执行用于透镜装置100的变焦操作(变倍操作)。响应于变焦操作环34的旋转,变焦透镜组2通过马达10和凸轮轴11被驱动,并由此改变焦距。变倍开关35被用于选择要将光学切换单元5的变倍透镜单元29和30中的哪一个插入图像拍摄光路中。在选择之后,旋转板28通过切换驱动器32旋转,并且,希望的变倍透镜单元被插入图像拍摄光路中。图像稳定化激活开关36被用于选择是否激活由图2的图像稳定化透镜单元4的机构执行的图像稳定化。操作臂37被用于对透镜装置100和图像拾取装置200执行摇摄(pan)/倾斜操作。
校正激活开关38被用作校正激活单元,该校正激活单元被用作用于激活在校正在透镜装置100中出现的光轴的位置偏离和透镜装置100与图像拾取装置200之间的光轴的位置偏离时的校正控制的开关。当校正激活开关38被接通时,变焦操作环34被切换成作为用于移动和操作图像稳定化透镜单元4的图像稳定化透镜驱动操作单元的操作环。预设开关39被用作用于在校正位置偏离时供给要被用于存储图像稳定化透镜单元4的位置的触发信号的存储操作单元。方向开关40被用于改变通过变焦操作环34移动的图像稳定化透镜单元4的移动方向。注意,变焦操作部分300被安装在从上面安装有透镜装置100和图像拾取装置200的能够摇摄和倾斜的操作基座(未示出)延伸的操作臂的尖端(tip end)上。这里,光轴的位置偏离表示,由于变焦透镜组2(包含被无意地倾斜或偏移的透镜的变焦透镜组2)的沿光轴方向的移动,位于成像面的中心处的对象图像沿与光轴垂直的方向移动。
以下,参照图5,描述透镜装置100、图像拾取装置200和它们的外围装置的控制块的配置。
在图5中,透镜CPU 41是用于控制透镜装置100的操作的控制器。透镜CPU 41控制聚焦、变焦、虹膜和图像稳定化的驱动,并且通过与图像拾取装置200、变焦操作部分300和聚焦操作部分400的通信来传送命令并处理各种类型的信息。
通过焦点位置传感器9获得的指示聚焦透镜单元1沿光轴方向的位置的电信号通过A/D转换器42被输入到透镜CPU 41。焦点位置传感器9将聚焦透镜单元1沿光轴方向的位置转换成电压,该电压然后通过A/D转换器42被转换成数字信号,并被输入到透镜CPU 41。变焦位置传感器12将变焦透镜组2沿光轴方向的位置转换成电压,该电压然后通过A/D转换器42被转换成数字信号,并被输入到透镜CPU41。虹膜的孔径光阑直径被传感器(未示出)检测,并且通过A/D转换器42被输入到透镜CPU 41。
以下,描述图像稳定化。当陀螺仪26和27检测到在透镜装置100上施加的振动时,陀螺仪26和27将由于振动产生的角速度转换成电压,该电压通过A/D转换器42被转换成数字信号,并被输入到透镜CPU 41。此外,用于检测图像稳定化透镜单元4沿各偏航和节距方向的位置的偏航方向位置传感器24和节距方向位置传感器25将这些位置转换成电压,这些电压然后通过A/D转换器42被转换成数字信号,并被输入到透镜CPU 41。另外,在光学切换单元中,变倍透镜单元29和30的旋转位置被旋转位置传感器33检测,并且旋转位置被转换成电压,这些电压然后通过A/D转换器42被转换成数字信号,并被输入到透镜CPU 41。
透镜CPU 41根据上述的各输入信息执行软件处理,以产生用于驱动聚焦、变焦、虹膜、图像稳定化和光学切换单元的控制信号。这些控制信号通过D/A转换器43被转换成模拟信号,这些模拟信号然后被传送到聚焦驱动电路44、变焦驱动电路45、虹膜驱动电路(未示出)、图像稳定化透镜驱动电路46和切换驱动电路47。关于聚焦,马达7借助于聚焦驱动电路44的驱动控制而旋转,以通过直进驱动机构8沿光轴O1的方向驱动聚焦透镜单元1。关于变焦,马达10借助于变焦驱动电路45的驱动控制而旋转,以通过凸轮轴11沿光轴O1的方向驱动变焦透镜组2。关于虹膜,虹膜机构3借助于虹膜驱动电路的驱动控制而改变孔径光阑直径。关于图像稳定化,通过图像稳定化透镜驱动电路46的驱动控制,线圈20和磁体22产生沿节距方向的电磁力,而线圈21和磁体23产生沿偏航方向的电磁力,以由此沿相应的方向驱动图像稳定化透镜单元4。另外,关于光学切换单元,切换驱动部分32通过切换驱动电路47的驱动控制而控制旋转板28。
存储器48是用于存储图像稳定化透镜单元4的位置的存储单元,并且存储通过透镜CPU 41从偏航方向位置传感器24和节距方向位置传感器25获取的位置信息。存储器48由透镜CPU 41控制以执行暂时写入/读取和删除。
以下,用作照相机信息输入单元的照相机号码输入单元49是用于输入与透镜装置100连接的图像拾取装置的装置信息的输入单元。当装置信息被输入时,装置信息被传送到透镜CPU 41,并被存储于存储器48中。在图1和图5中,图像拾取装置200与透镜装置100连接,由此,在这种情况下,当图像拾取装置200的装置信息被输入时,所述装置信息被存储于存储器48中。
在透镜装置100与图像拾取装置200连接的状态下,透镜CPU 41可与照相机CPU 50通信,以由此执行命令和各种控制信号的通信。从透镜装置100,提供关于聚焦、变焦、虹膜、图像稳定化和光学切换单元的位置和设置的信息,同时,透镜CPU 41从图像拾取装置200接收例如根据图像拾取元件13的光束接收状态的虹膜打开直径的命令,以执行透镜侧的驱动。在透镜装置100与变焦操作部分300和聚焦操作部分400连接的状态下,透镜CPU 41还与操作部分侧的那些CPU通信,以从各操作部分接收输入信号。
以下,描述图像拾取装置200。在图像拾取装置200中,通过透镜装置100的光学系统获得的光学图像由图像拾取元件13通过光电转换被转换成电压,并且,该电压对于各扫描元件通过A/D转换器51被转换成数字信号。然后,信号处理器52对该数字信号执行帧处理和灰度处理,以产生图像信号。然后,该图像信号经由照相机CPU 50被D/A转换器53转换成模拟信号,并且,图像处理器54执行对于频带的过滤处理。然后,得到的信号被输出到监视器55。波形监视器56是能够输出要被用于后面描述的光轴的位置偏离的校正的图像扫描线上的波形的图像监视器。图像信号通过图像拾取装置200的图像处理器54被发送到波形监视器56。
以下,描述变焦操作部分300。当操作者操作变焦操作环34时,针对该环所设置的旋转传感器(未示出)检测变焦操作环34的旋转角度,并且,通过该检测所获得的电压通过A/D转换器57被转换成数字信号。然后,该数字信号作为输入命令信号从操作部分CPU 58被传送到透镜CPU 41。当接收到该输入命令时,透镜CPU 41设定目标位置,该目标位置基于变焦操作部分300的输入值和从变焦位置传感器12获得的变焦透镜组2的初始位置被可变地确定。因此,透镜CPU41通过D/A转换器43和变焦驱动电路45驱动变焦透镜组2。此外,来自对于变焦操作部分300所设置的各种开关的输入,即,来自变倍开关35、图像稳定化激活开关36、校正激活开关38、预设开关39和方向开关40的输入,通过A/D转换器57被转换成数字信号。然后,这些数字信号作为要被用于各种设置变化的输入命令信号被传送到操作部分CPU 58,并然后被发送到透镜CPU 41。
关于聚焦操作部分400,与变焦操作部分300类似,传感器(未示出)检测通过由聚焦操作部件(未示出)执行的焦点调整操作而获得的操作量,并且,通过该检测所获得的电压通过A/D转换器(未示出)被转换成数字信号。然后,该数字信号作为输入命令信号从聚焦操作部分400的CPU(未示出)被传送到透镜CPU 41。
当接收到命令时,透镜CPU 41设定目标位置,该目标位置基于操作部分的输入值和从焦点位置传感器9获得的聚焦透镜单元1的初始位置被可变地确定。因此,透镜CPU 41通过D/A转换器43和聚焦驱动电路44来驱动聚焦透镜单元1。
顺便地说,图5的照相机号码输入单元49包含于透镜装置100中,但是作为替代,也可包含于变焦操作部分300或聚焦操作部分400中,并且可因此通过各操作部分的CPU向透镜CPU 41传送各输入信息。此外,照相机号码输入单元49可包含于图像拾取装置中,并因此可通过命令通信向后面描述的照相机CPU输入信息。变焦操作环34也被用于校正光轴的位置偏离,但是,作为替代,可由可获得与变焦操作环34的调整量相同的调整量的聚焦操作部分400的聚焦操作部件执行校正。此时,可对于聚焦操作部分400设置图5所示的变焦操作部分300的各种开关。
第一实施例
参照图6~10,描述根据本发明的第一实施例的透镜装置。
在理想条件下,位于透镜光轴上的对象的图像点置于像面上的预定点,并且不根据变焦倍率而位移。因此,当透镜装置的光轴与成像面的中心匹配时,在成像面的中心处形成的对象图像不根据变焦倍率而移动。但是,当透镜装置的光轴不与成像面的中心匹配时,以成像面内的透镜光轴的位置为中心,在成像面上拍摄与变焦倍率对应的场角的图像。因此,在成像面的中心处形成的对象图像由于变焦倍率的变化(通过变倍透镜单元的移动而引起的焦距的变化)而移动,从而导致操作者不想要的不自然的图像移动(位置偏离)。因此,本实施例的一个目的是,提供这样的透镜装置:在该透镜装置中,即使透镜装置和图像拾取装置之间的连接导致透镜装置的光轴的位置不与图像拾取装置的成像面的中心匹配的情形,该成像面的中心处的对象图像也不根据图像拾取倍率的变化而位移。
图6示出在透镜装置100和图像拾取装置200相互连接之后在对焦状态中拍摄十字形标记59的图像时的监视器55上的图像。此时,操作者在透镜的变焦位置处于望远端的条件下操作操作臂37(执行摇摄/倾斜操作),以使得标记59的位置与在监视器55上显示的图像拍摄画面沿纵向(Y)和横向(X)的照相机中心线匹配。因此,标记59的位置与图像拾取装置200的图像拾取元件的中心位置对准。在图7中,纵向中心线和横向中心线的交点指示图像拾取元件13的扫描中心。当操作者随后操作变焦操作环34以向广角侧偏移变焦位置时,标记59的位置可如图6所示的那样偏离照相机中心(成像面的中心),从而导致在广角端处的最大偏离。相反,当操作者在广角端处对准标记59和照相机中心的位置并然后向望远侧偏移变焦位置时,场角变窄,由此光学透镜的光轴的位置偏离敏感度一般在望远侧是高的,结果,与从望远端向广角端的偏移相比,位置偏离量更大。如果没有在透镜装置100的变焦期间的位置偏离的影响,那么该现象是由于这样的事实而出现的位置偏离:即,图1的光轴O1和O2因图像拾取装置200的安装误差而导致不相互匹配。如果事先调整透镜装置和图像拾取装置,那么不出现该位置偏离。
如果不出现位置偏离,那么只要如常规的图像拍摄装置的情况那样,事先通过图像稳定化透镜校正位置偏离,就可抑制位置偏离。但是,通过使用用于安装/去除透镜装置的安装部分14来连接的透镜装置100不一定与图像拾取装置200连接,由此,针对特定的组合来校正位置不是有效的。
参照图7和随后的图,鉴于上述的问题,描述用于适当地校正可去除透镜装置和图像拾取装置的配置中的位置偏离的流程。
图7是在透镜装置100和图像拾取装置200相互连接之后、在对焦状态中拍摄对象的十字形标记59的图像时的波形监视器56上的图像的示图。针对纵向(Y)和横向(X)而分割监视器的显示,并且,对于各方向显示位置接近照相机中心的特定扫描线的图像输出。在图7中,标记59偏离照相机中心,此时,针对X方向和Y方向中的每一个,输出标记59的线宽的波形和照相机中心线的线宽的波形。操作者在后面的校正操作中操作操作臂37或移动图像稳定化透镜单元4,以由此使位置对准,以使得标记59的线宽的波形与照相机中心线的线宽匹配。
注意,波形监视器56被用于精确的位置对准,但是,如果监视器55的分辨率高并由此允许精确的位置对准,那么作为替代可以使用监视器55。此外,十字形标记59被用于位置对准,但是,本发明不限于该形状,而是,只要可从对比度的差异读取沿纵向(Y)和横向(X)的中心位置,那么可以使用任意的标记。
以下,参照图8的说明图和图9的流程图,描述在存在由于透镜装置和图像拾取装置的安装误差导致的位置偏离的情况下的校正操作和用作图像稳定化控制器的透镜CPU 41的软件处理。
参照图9,当向透镜装置100和图像拾取装置200供给电力时,透镜CPU 41使图像稳定化透镜单元4向事先存储于存储器48中的与光轴O1匹配的基准位置(x0,y0)移动。图像稳定化透镜单元4按以下方式移动到基准位置。即,使用偏航方向位置传感器24和节距方向位置传感器25来读取图像稳定化透镜单元4的位置,然后,设定目标基准位置,然后,通过线圈20和21以及磁体22和23驱动图像稳定化透镜单元4(步骤101)。在激活之后,透镜CPU 41检查校正激活开关38是否为接通(步骤102)。当校正激活开关38为接通时,透镜CPU 41确定模式被切换到校正模式,并且前进到下一步骤。当校正激活开关38为关断时,透镜CPU 41确定不执行校正,并且前进到后面描述的图10的操作。随后,透镜CPU 41从变焦位置传感器12获取透镜变焦位置Zn(步骤103)。当Zn的值是作为望远端的值的值Zt时,透镜CPU 41直接前进到下一步骤(步骤104)。当Zn的值不是Zt时,透镜CPU 41通过变焦驱动电路45将变焦透镜组2驱动到望远端处的位置(步骤105)。然后,透镜CPU 41再次在步骤103中读取Zn,并且,在透镜CPU 41在步骤104中确认Zn=Zt之后,透镜CPU 41前进到下一步骤。此时,操作者使用聚焦操作部分400来驱动聚焦透镜单元1,以由此在标记59上执行聚焦。然后,操作者操作操作臂37以调整透镜装置100和图像拾取装置200的摇摄/倾斜方向,使得作为对象的标记59的中心位置与照相机中心(图像拍摄画面(成像面)的中心)匹配。此时,图7的波形监视器56的使用有利于位置对准。
图8是例示在调整摇摄/倾斜方向使得标记中心与照相机中心在望远端处匹配的状态下执行到广角端的变焦操作时的标记中心的位移的图。当操作者按压变焦操作部分300的预设开关39时,图像稳定化透镜单元4的当前位置可被存储。当透镜CPU 41确认预设开关39的输入信号时,透镜CPU 41读取变焦位置Zt以及偏航方向位置传感器24和节距方向位置传感器25的输出值(xt,yt)(图像稳定化透镜单元4的位置),并且在存储器48中存储变焦位置Zt和输出值(xt,yt)(步骤106)。在望远端处,图像稳定化透镜单元4位于通电后的基准位置,由此,x0=xt并且y0=yt。随后,透镜CPU 41通过变焦驱动电路45将变焦透镜组2驱动到广角端处的位置(步骤107)。此时,变焦位置Zn变为广角端的Zw。在图8中,广角端处的标记中心偏离图像拍摄画面的中心。此时,操作者为了位置对准而操作变焦操作环34以移动图像稳定化透镜单元4,使得标记59的中心位置与图像拍摄画面的中心匹配。当操作者操作变焦操作环34时,图像稳定化透镜单元4沿图8的X方向移动,并且,当操作者在按压方向开关40的同时操作变焦操作环34时,图像稳定化透镜单元4沿Y方向移动。当操作者在完成位置对准之后按压变焦操作部分300的预设开关39时,这种状态下的图像稳定化透镜单元4的位置被存储。在透镜CPU 41确认预设开关39的输入信号之后,透镜CPU 41读取变焦位置Zw以及指示图像稳定化透镜单元4的位置的偏航方向位置传感器24和节距方向位置传感器25的输出值(xw,yw),并且在存储器48中存储该变焦位置Zw和该输出值(xw,yw)(步骤108)。随后,透镜CPU 41计算存储于存储器48中的望远端处和广角端处的图像稳定化透镜单元4的移动位置(输出值)之间的差值(xt-xw,yt-yw)(校正偏移量)(步骤109)。然后,透镜CPU 41通过下式、基于该差值和变焦位置Zn的采样点的总数Z来获得校正系数k1(kx1,ky1)(步骤110)。
kx1=(xt-xw)/Z ...(1)
ky1=(yt-yw)/Z ...(2)
这里,kx1和ky1分别表示关于X方向和Y方向的校正系数。随后,透镜CPU 41通过下式获得图像稳定化透镜单元4在变焦位置Zn处的校正偏移量D1n(Dx1n,Dy1n)(步骤111)。
Dx1n=kx1×Zn ...(3)
Dy1n=ky1×Zn ...(4)
这里,Dx1n和Dy1n分别表示变焦位置Zn处的图像稳定化透镜单元4的关于X方向和Y方向的移动量(校正偏移量)。然后,透镜CPU41在存储器48中存储所获得的校正系数kx1和ky1以及所获得的校正偏移量D1n(Dx1n,Dy1n)的设定式(步骤112)。最后,响应于关断校正激活开关38的输入命令,透镜CPU 41通过使用变焦操作环34使得操作命令的分配从图像稳定化透镜单元4的移动返回到作为正常的图像拍摄操作的变焦透镜组2的移动(步骤113)。
以下,参照图10的流程图,描述在对于位置偏离的校正设定校正系数k1(kx1,ky1)和校正偏移量D1n(Dx1n,Dy1n)的等式之后执行的正常图像拍摄时的用作图像稳定化控制器的透镜CPU 41的软件处理。
参照图10,当向透镜装置100和图像拾取装置200供给电力时,通过与图9的步骤101相同的操作,透镜CPU 41将图像稳定化透镜单元4移动到事先存储于存储器48中的与光轴O1匹配的基准位置(x0,y0)(步骤201)。随后,透镜CPU 41从变焦位置传感器12获取透镜变焦位置Zn(步骤202)。随后,透镜CPU 41从存储器48读取变焦位置Zn处的校正偏移量D1n(Dx1n,Dy1n)(步骤203)。如果校正偏移量D1n(Dx1n,Dy1n)被记录为包含与变焦位置Zn对应的值的表,那么透镜CPU 41可读取与变焦位置Zn对应的校正偏移量D1n(Dx1n,Dy1n)。如果作为变焦位置Zn的函数以等式的形式记录校正偏移量D1n(Dx1n,Dy1n),那么透镜CPU 41可计算校正偏移量D1n。随后,透镜CPU 41设定要被偏移D1n(Dx1n,Dy1n)的图像稳定化透镜单元4的移动目标坐标(步骤204)。然后,透镜CPU 41通过图像稳定化透镜驱动电路46将图像稳定化透镜单元4驱动到目标坐标(步骤205)。然后,如果不通过操作者的变焦操作偏移变焦位置Zn(步骤206),则操作结束。当变焦位置偏移时,透镜CPU 41返回步骤202,以再次获取变焦位置Zn,并且,基于变焦位置Zn处的偏移量D1n来驱动图像稳定化透镜单元4以再次校正。
通过上述的操作过程,产生在可去除的透镜装置和图像拾取装置的组合中减少由于透镜装置和图像拾取装置的安装误差导致的变焦操作期间的图像拍摄画面的中心处的对象图像的移动(光轴的位置偏离)的效果。通过可用于图像拍摄的操作部分来执行校正操作,并且,可使用允许确定中心的对象的任何标记,而不管该标记的形状如何。因此,即使在诸如图像拍摄位置的限制环境中,也可容易地执行校正。当任何不同的透镜装置和图像拾取装置相互连接时,校正操作仅需要在使用透镜装置和图像拾取装置的组合的图像拍摄位置处被执行,以由此获得新的校正偏移量。注意,在图9中,通过使用望远端和广角端的两个变倍位置来设定校正系数,但是,可以使用两个或更多个变倍位置。例如,在变焦期间的各位置处重复步骤107~步骤108的操作,并且,存储各位置处的图像稳定化透镜单元4的移动位置,这些移动位置被用于设定校正系数。此外,在图9中,考虑到图像稳定化透镜单元4的移动范围和图像稳定化透镜单元4在较大程度上移动时光学性能降低,位置偏离的敏感度高的望远端在校正中被设为基准位置。但是,在没有所述范围和性能降低的影响的情况下,即使另一变焦位置被设为基准,也没有问题。
第二实施例
以下,参照图11的说明图以及图12和13的流程图,描述在透镜装置的光轴位置在变焦操作期间偏离的情况下防止成像面的中心位置处的对象图像根据变焦位置而移动的校正和透镜CPU 41的软件处理。
用于校正变焦期间的光轴的位置偏离的图12的流程图中的步骤301~步骤308的操作与用于校正由于透镜装置和图像拾取装置的安装误差导致的光轴的位置偏离的图9的流程图中的步骤101~步骤108的操作相同。具体地,当校正激活开关38为接通时,透镜CPU 41存储望远端处的图像稳定化透镜单元4的位置作为基准位置(xt,yt),并且,在将变焦位置移动到广角端之后,存储在图像稳定化透镜单元4移动以对准标记和照相机中心的位置之后的图像稳定化透镜单元4的移动位置(xw,yw)。为了与后面描述的图13的操作区分开,在这种情况下可执行不同的操作以激活校正。例如,校正激活开关38可在按压方向开关40时被接通,并且,该操作仅需要是不被操作者正常执行的操作并且可作为不同的校正激活被透镜CPU 41识别。以这种方式,透镜CPU 41可通过激活方法识别是否执行图12的操作,或者,是否执行后面描述的图13的校正透镜装置和图像拾取装置的安装误差的操作。此外,由于只有变焦期间的位置偏离可被提取为校正目标,因此希望要在图12的校正操作中使用的图像拾取装置是关于透镜装置100的安装部分14精确地调整光轴的装置。
如图11所示,由于透镜装置自身的制造误差等的影响,当变焦位置在标记中心在望远端处与图像拍摄画面的中心对准之后移动到广角端时,标记偏离并且位于图11所示的位置。在图8的存在由于透镜装置和图像拾取装置的安装误差导致的位置偏离的情况下,出现形成基本上呈线性的轨迹的标记的位置偏离,但是,在由于透镜装置自身导致的变焦期间的位置偏离中,由于例如如图11那样在变焦期间形成圆弧轨迹,因此轨迹在一些情况下不是简单的。这是由于,例如,在构成透镜装置的透镜或机械部件的布置中,在透镜装置中的多个地点处出现位置偏离。鉴于以上情况,在由于透镜装置自身导致的变焦期间的位置偏离的情况下,还需要考虑变焦期间的位置。因此,在广角端处的图像稳定化透镜单元4的移动位置在步骤308中被存储之后,透镜CPU 41通过变焦驱动电路45将变焦透镜组2驱动到预定的变焦位置Zn(步骤309)。此时,操作者通过与图9中的操作相同的操作、为了位置对准而移动图像稳定化透镜单元4。然后,当操作者按压预设开关39时,这种状态下的图像稳定化透镜单元4的位置被存储。在透镜CPU 41确认预设开关39的输入信号之后,透镜CPU 41获取变焦期间的图像稳定化透镜单元4的移动位置(xn,yn),并且在存储器48中存储移动位置(xn,yn)(步骤310)。然后,透镜CPU 41在偏移变焦位置的同时重复步骤309和步骤310的操作,并且存储图像稳定化透镜单元4的各移动位置。在透镜CPU 41重复该操作n次(这里,n代表整数)之后,透镜CPU 41前进到下一步骤(步骤311)。随后,透镜CPU 41读取各移动位置的坐标,并且导出近似的多项式校正式f1(Zn)(=(fx1(Zn),fy1(Zn))),该多项式校正式表示穿过望远端(xt,yt)和广角端(xw,yw)并且还穿过接近各变焦位置Zn处的坐标(xn,yn)的位置的曲线(步骤312)。导出的校正式f1被存储在存储器48中(步骤313)。最后,响应于关断校正激活开关38的输入命令,透镜CPU 41通过使用变焦操作环34使得操作命令的分配从图像稳定化透镜单元4的移动返回到作为正常图像拍摄操作的变焦透镜组2的移动(步骤314)。
以下,参照图13的流程图,描述具有用于图12的流程图中的变焦期间的光轴的位置偏离的校正的校正式f1的、对于由于图像拾取装置和透镜装置的安装误差导致的光轴的位置偏离的校正操作。
图13的流程图中的步骤401~步骤411的操作与图9的步骤101~步骤110的操作基本上相同。具体地,当校正激活开关38为接通时,透镜CPU 41存储望远端处的图像稳定化透镜单元4的位置作为基准位置(xt,yt)(步骤407),然后将变焦移动到广角端(步骤408),并然后存储在图像稳定化透镜单元4移动以对准标记和图像拍摄画面的中心的位置之后的图像稳定化透镜单元4的移动位置(xw,yw)(步骤409)。如果校正激活开关38为关断,那么透镜CPU 41确定不执行校正,并且前进到后面描述的操作模式(图14)。随后,透镜CPU41计算望远端和广角端处的图像稳定化透镜单元4的移动位置之间的差值(xt-xw,yt-yw)(步骤410),并且,通过下式、基于该差值和变焦位置Zn的采样点的总数Z获得关于X方向和Y方向的校正系数kx1和ky1(步骤411)。
kx1=(xt-xw)/Z ...(1)
ky1=(yt-yw)/Z ...(2)
通过获得校正系数,通过下式获得用于校正由于透镜装置100和图像拾取装置200的安装误差导致的位置偏离的校正偏移量D1n(Dx1n,Dy1n)。
Dx1n=kx1×Zn ...(3)
Dy1n=ky1×Zn ...(4)
图13的步骤401~步骤411的处理与图9的步骤101~步骤110的处理的不同之处在于,在紧接在当在步骤402(步骤102)中透镜CPU 41确认校正激活之后,透镜CPU 41在步骤403中读取存储于存储器48中的校正式(f1(Zn)=(fx1(Zn),fy1(Zn)))。然后,在图13的步骤404和随后的步骤的处理中,透镜CPU 41以由校正式f1表示的与变焦位置(望远端和广角端)对应的校正量使图像稳定化透镜单元4位移,并且以位移之后的图像稳定化透镜单元4的位置为基准获得望远端处的图像稳定化透镜单元4的移动位置(xt,yt)和广角端处的图像稳定化透镜单元4的移动位置(xw,yw),这也是图13的处理和图9的处理之间的不同之处。换句话说,在以校正式F1校正由于透镜装置自身导致的变焦操作期间的光轴的位移的状态下,执行图13的步骤401~步骤411的校正处理,并且,只有由于透镜装置和图像拾取装置之间的连接导致的光轴的偏离被单独地设为校正目标。
通过校正式f1,透镜CPU 41获得用于校正透镜装置100的变焦期间的位置偏离的图像稳定化透镜单元4的校正偏移量L1n(Lx1n,Ly1n)。
Lx1n=fx1(Zn) ...(5)
Ly1n=fy1(Zn) ...(6)
这里,Lx1n和Ly1n分别表示关于X方向和Y方向的图像稳定化透镜单元4的校正偏移量,并且,fx1和fy1分别表示关于X方向和Y方向的校正式。随后,通过式(3)和(4)以及式(5)和(6),透镜CPU 41获得变焦位置Zn处的图像稳定化透镜单元4的最终校正偏移量D2n(Dx2n,Dy2n)(步骤412)。
Dx2n=Lx1n+Dx1n ...(7)
Dy2n=Ly1n+Dy1n ...(8)
这里,Dx2n和Dy2n分别表示关于X方向和Y方向的校正偏移量。然后,透镜CPU 41在存储器48中存储所获得的校正系数k1(kx1,ky1)以及所获得的校正偏移量D1n(Dx1n,Dy1n)和L1n(Lx1n,Ly1n)与最终校正偏移量D2n(Dx2n,Dy2n)的设定式(步骤413)。最终,响应于关断校正激活开关38的输入命令,透镜CPU 41使得使用变焦操作环34的操作命令从图像稳定化透镜单元4的移动返回到变焦透镜组2的移动(步骤414)。
以下,参照图14,描述在对于位置偏离的校正设定校正系数k1(kx1,ky1)以及校正偏移量D1n(Dx1n,Dy1n)和L1n(Lx1n,Ly1n)与最终校正偏移量D2n(Dx2n,Dy2n)的式子之后执行的正常图像拍摄时的用作图像稳定化控制器的透镜CPU 41的软件处理。
图14的步骤501和步骤502的操作与图10的步骤201和步骤202的操作相同。具体地,在透镜CPU 41将图像稳定化透镜单元4移动到事先存储于存储器48中的与光轴O1匹配的基准位置(x0,y0)之后,透镜CPU 41获取透镜变焦位置Zn。随后,透镜CPU 41从存储器48读取变焦位置Zn处的校正偏移量D2n(Dx2n,Dy2n)(步骤503)。随后,透镜CPU 41设定要被偏移D2n(Dx2n,Dy2n)的图像稳定化透镜单元4的移动目标坐标(步骤504)。校正偏移量D2n(Dx2n,Dy2n)包含由于透镜装置100自身导致的变焦期间的位置偏离的校正偏移量L1n(Lx1n,Ly1n)以及由于透镜装置100和图像拾取装置200之间的相对位置偏离导致的位置偏离的校正偏移量D1n(Dx1n,Dy1n)。由此,通过校正变焦位置Zn处的各位置偏离而获得的移动目标坐标被设定。然后,透镜CPU 41通过图像稳定化透镜驱动电路46将图像稳定化透镜单元4驱动到目标坐标(步骤505)。然后,如果不通过操作者的变焦操作偏移变焦位置Zn(步骤506),则操作结束。在偏移变焦位置的情况下,透镜CPU 41返回步骤502,以再次获取Zn,并且,基于位置Zn处的偏移量D2n驱动图像稳定化透镜单元4以再次校正。
通过上述的操作过程,在可去除的透镜装置和图像拾取装置的组合中,可以校正和减少透镜装置的变焦期间的光轴的位置偏离以及由于透镜装置和图像拾取装置的安装误差导致的位置偏离。作为透镜装置的固有特性,处置由于透镜装置自身导致的变焦期间的光轴的位置偏离。
因此,当在工厂中组装透镜装置时执行图12的关于变焦期间的光轴的偏离的校正时,操作者仅需要在图像拍摄位置处执行图13的校正。如果要同时执行图12和图13的校正操作,那么在图12的步骤312中计算校正式f1,然后,使用在图13的步骤412中获得的式(5)和(6)中的每一个的值L1n(Lx1n,Ly1n)作为用于校正的驱动用校正偏移量。注意,如在第一实施例中那样,在没有图像稳定化透镜单元4的移动范围和光学性能的降低的影响的情况下,即使望远端以外的另一变焦位置被设为基准,也没有问题。
第三实施例
以下,参照图15的说明图和图16的流程图,描述在存在由于向/从图像拍摄光路插入/去除光学切换单元5的各光学透镜导致的光轴的位置偏离的情况下的透镜CPU 41的软件处理。然后,参照图17,描述在存在由于透镜装置和图像拾取装置的安装误差导致的位置偏离的情况下的校正操作。
图16的步骤601和步骤602的操作与图9的步骤101和步骤102的操作相同。具体地,在透镜CPU 41将图像稳定化透镜单元4移动到事先存储于存储器48中的与光轴O1匹配的基准位置(x0,y0)之后,当校正激活开关38为接通时,透镜CPU 41前进到下一步骤。为了与后面描述的图17的操作区分开,对于激活校正,在这种情况下可执行不同的操作。该操作仅需要是在正常图像拍摄处理时不被操作者执行的操作并且可作为不同的校正激活被透镜CPU 41识别。以这种方式,透镜CPU 41可通过激活方法来识别是否执行图16的操作,或者,是否执行后面描述的图17的校正透镜装置和图像拾取装置的安装误差的操作。此外,由于可仅将光学切换单元的光学透镜的切换导致的位置偏离提取为校正目标,因此希望在图16的校正操作中要被使用的图像拾取装置是关于透镜装置100的安装部分14精确地调整光轴的装置。
响应于激活校正的输入命令,透镜CPU 41从光学切换单元5的旋转位置传感器33获取光学切换单元的旋转位置。光学切换单元5包含变倍比不同的两个光学单元,即变倍透镜单元29和变倍透镜单元30,由此,透镜CPU 41获取当将所述透镜单元中的任一个插入到图像拍摄光路时的旋转位置([1]或[2])(步骤603)。当旋转位置的值是指示变倍透镜单元29被插入到图像拍摄光路中的状态的值[1]时,透镜CPU 41直接前进到下一步骤即步骤606(步骤604)。当旋转位置的值不是[1]时,透镜CPU 41通过切换驱动电路47旋转旋转板28,以驱动变倍透镜单元29,使得变倍透镜单元29被插入到图像拍摄光路中(步骤605)。然后,透镜CPU 41在步骤603中再次读取旋转位置,并且,在透镜CPU 41确认步骤604中的[1]的状态之后,透镜CPU41前进到下一步骤即步骤606。
随后,透镜CPU 41从变焦位置传感器12获取透镜的变焦位置Zn(步骤606)。当变焦位置Zn的值是望远端的值Zt时,透镜CPU41直接前进到下一步骤即步骤609(步骤607)。当变焦位置Zn的值不是Zt时,透镜CPU 41通过变焦驱动电路45将变焦透镜组2驱动到望远端处的位置(步骤608)。然后,透镜CPU 41再次在步骤606中读取变焦位置Zn,并且,在透镜CPU 41在步骤607中确认Zn=Zt之后,透镜CPU 41前进到下一步骤即步骤609。
此时,操作者使用聚焦操作部分400来驱动聚焦透镜单元1,以由此对标记59执行聚焦。然后,操作者操作操作臂37以使透镜装置100与图像拾取装置200的位置对准(执行摇摄/倾斜操作等),使得标记59的中心位置位于图像拍摄画面的中心。图15示出当变倍透镜单元29被插入到图像拍摄光路时望远端处的标记中心与图像拍摄画面的中心匹配的状态。此时,当操作者按压预设开关39时,这种状态下的图像稳定化透镜单元4的位置被存储。
在透镜CPU 41确认预设开关39的输入信号时,透镜CPU 41存储这种状态下的图像稳定化透镜单元4的位置(步骤609)。此时,响应于预设开关39的输入命令,透镜CPU 41读取变焦位置Zt以及指示图像稳定化透镜单元4的位置的偏航方向位置传感器24和节距方向位置传感器25的输出值(xt,yt),并且在存储器48中存储变焦位置Zt和输出值(xt,yt)。在望远端处,图像稳定化透镜单元4不移动(位于基准位置),由此,x0=xt且y0=yt。
随后,透镜CPU 41通过切换驱动电路47旋转旋转板28以将变倍透镜单元30驱动到图像拍摄光路上的插入位置(步骤610)。此时,旋转位置的值是[2]。在图15中,在是[2]的情况下标记中心在望远侧和广角侧均偏离照相机中心。随后,透镜CPU 41获取[2]的状态下的透镜变焦位置Zn(步骤611)。当变焦位置Zn的值是望远端处的值Zt时,透镜CPU 41直接前进到下一步骤(步骤612)。当变焦位置Zn的值不是Zt时,透镜CPU 41将变焦透镜组2驱动到望远端处的位置(步骤613)。
然后,透镜CPU 41再次在步骤611中读取变焦位置Zn,并且,在透镜CPU 41在步骤612中确认Zn=Zt之后,透镜CPU 41前进到下一步骤。此时,操作者操作变焦操作环34以为了位置对准而移动图像稳定化透镜单元4,使得标记59的中心位置与图像拍摄画面的中心匹配。当操作者在位置对准之后按压预设开关39时,这种状态下的图像稳定化透镜单元4的位置被存储。在透镜CPU 41确认预设开关39的输入信号之后,透镜CPU 41存储[2]的状态下的图像稳定化透镜单元4的移动位置([2]xt,[2]yt)(步骤614)。
随后,透镜CPU 41计算存储于存储器48中的在[1]的状态下的望远端处的输出值和在[2]的状态下的望远端处的输出值之间的差值(xt-[2]xt,yt-[2]yt)(步骤615)。然后,透镜CPU 41在存储器48中存储该差值(步骤616)。最后,操作者关断校正激活开关38以完成校正模式(步骤617)。最后,响应于关断校正激活开关38的输入命令,透镜CPU 41通过使用变焦操作环34使得操作命令的分配从图像稳定化透镜单元4的移动返回到作为正常的图像拍摄操作的变焦透镜组2的移动。
以下,参照图17的流程图,描述当在执行图16的校正操作之后光学切换单元5处于[2]的状态时的由于透镜装置100和图像拾取装置200的安装误差导致的位置偏离的校正操作。注意,当光学切换单元5处于[1]的状态下时的位置偏离的校正操作与图9的校正操作相同,因此,在这里省略其描述。
图17的步骤701~步骤703的操作与图16的步骤601~步骤603的操作相同。具体地,在透镜CPU 41将图像稳定化透镜单元4移动到事先存储于存储器48中的与光轴O1匹配的基准位置(x0,y0)之后,当校正激活开关38为接通时,透镜CPU 41获取光学切换单元的旋转位置。当旋转位置的值为[2]时,透镜CPU 41直接前进到下一步骤(步骤704)。当旋转位置的值不为[2]时,透镜CPU 41通过切换驱动电路47旋转旋转板28以驱动变倍透镜单元30,使得变倍透镜单元30被插入图像拍摄光路中(步骤705)。然后,透镜CPU 41再次在步骤703中读取旋转位置,并且,在透镜CPU 41确认步骤704中的[2]的状态之后,透镜CPU 41前进到下一步骤。除了光学切换单元5被切换到[2]的状态以外,随后的步骤706~步骤712的操作与图9的步骤103~步骤109的操作相同。具体地,在[2]的状态中,透镜CPU41将变焦位置移动到望远端Zt,并且,在透镜装置和图像拾取装置被操作为使标记中心与图像拍摄画面的中心的位置对准之后,存储望远端处的图像稳定化透镜单元4的位置([2]xt,[2]yt)。然后,透镜CPU41将变焦位置移动到广角端Zw,并且存储在图像稳定化透镜单元4移动为使标记中心与图像拍摄画面的中心的位置对准之后图像稳定化透镜单元4的位置([2]xw,[2]yw)。然后,透镜CPU 41计算存储于存储器48中的望远端处和广角端处的输出值之间的差值([2]xt-[2]xw,[2]yt-[2]yw)。随后,透镜CPU 41通过下式、基于该差值和变焦位置Zn的采样点的总数Z而获得在[2]的状态下的中心位置处的校正系数k2(步骤713)。
kx2=([2]xt-[2]xw)/Z ...(9)
ky2=([2]yt-[2]yw)/Z ...(10)
这里,kx2和ky2分别表示关于X方向和Y方向的校正系数。
随后,透镜CPU 41从存储器48读取在图16中计算的[1]和[2]的状态之间的差值(xt-[2]xt,yt-[2]yt)(步骤714)。然后,通过式(9)和(10)以及该差值,透镜CPU 41获得在[2]的状态中的变焦位置Zn处的图像稳定化透镜单元4的校正偏移量D3n(步骤715)。
Dx3n=kx2×Zn+(xt-[2]xt) ...(11)
Dy3n=ky2×Zn+(yt-[2]yt) ...(12)
这里,Dx3n和Dy3n分别表示关于X方向和Y方向的校正偏移量。然后,透镜CPU 41在存储器48中存储所获得的校正系数k2(kx2,ky2)和所获得的校正偏移量D3n(Dx3n,Dy3n)的设定式(步骤716)。最后,响应于关断校正激活开关38的输入命令,透镜CPU 41通过使用变焦操作环34使得操作命令的分配从图像稳定化透镜单元4的移动返回到作为正常图像拍摄操作的变焦透镜组2的移动(步骤717)。
以下,参照图18的流程图,描述在位置偏离的校正之后执行的正常图像拍摄时的用作图像稳定化控制器的透镜CPU 41的软件处理。
参照图18,当向透镜装置100和图像拾取装置200供给电力时,如图9的步骤101那样,透镜CPU 41使图像稳定化透镜单元4移动到事先存储于存储器48中的与光轴O1匹配的基准位置(x0,y0)(步骤801)。随后,透镜CPU 41为了确定光学切换单元5的变倍透镜单元29和变倍透镜单元30中的哪一个要被插入到图像拍摄光路中而获取旋转位置[1]或[2](步骤802)。当旋转位置的值是指示变倍透镜单元29被插入到图像拍摄光路中的状态的值[1]时,透镜CPU 41直接前进到下一步骤(步骤803)。当旋转位置的值不是[1]时,透镜CPU 41前进到对于值[2]的步骤。对于值[1]的步骤804~步骤808的操作与图10的步骤202~步骤206的操作相同。具体地,在透镜CPU 41获取变焦位置Zn之后,透镜CPU 41读取校正偏移量D1n,并且设定要被偏移D1n的图像稳定化透镜单元4的移动目标坐标。然后,透镜CPU41将图像稳定化透镜单元4驱动到目标坐标。然后,如果变焦位置Zn不偏移,则操作结束。当变焦位置偏移时,透镜CPU 41再次获取Zn,并且基于位置Zn处的偏移量D1n、为了校正而驱动图像稳定化透镜单元4。当在步骤803中,光学切换单元5不处于[1]的状态时,透镜CPU 41获取[2]的状态中的变焦位置Zn(步骤809)。然后,透镜CPU 41从存储器48读取用于校正由于[1]和[2]之间的切换导致的位置偏离和由于在[2]的状态中透镜装置100和图像拾取装置200的安装误差导致的位置偏离的校正偏移量D3n(Dx3n,Dy3n)(步骤810)。随后,透镜CPU 41设定要被偏移D3n(Dx3n,Dy3n)的图像稳定化透镜单元4的移动目标坐标(步骤811)。然后,透镜CPU 41通过图像稳定化透镜驱动电路46将图像稳定化透镜单元4驱动到目标坐标(步骤812)。然后,如果不通过操作者的变焦操作偏移变焦位置Zn(步骤813),则操作结束。当变焦位置偏移时,透镜CPU 41返回到步骤809,以再次获取Zn,并且,基于位置Zn处的偏移量D3n(Dx3n,Dy3n)驱动图像稳定化透镜单元4以再次校正。
通过上述的操作过程,在可去除的透镜装置和图像拾取装置的组合中,可以校正和减少透镜装置的光学切换单元的光轴的位置偏离以及由于透镜装置和图像拾取装置的安装误差导致的位置偏离。由于变倍透镜单元的插入/去除导致的光轴的位置偏离作为透镜装置的固有特性被处置,并且归因于透镜装置自身。因此,例如,当在工厂中组装透镜装置时执行图16的关于由于变倍透镜单元的插入/去除导致的光轴的位置偏离的校正时,操作者仅需要在图像拍摄位置处执行图17的校正。顺便地说,在图16和图17中,校正是依赖于变倍比不同的两个透镜单元而执行的,但是,如果光学切换单元通过单个变倍透镜的插入/去除来切换变倍比,那么根据是否插入了变倍透镜来执行校正操作。注意,如在第一实施例中那样,在没有图像稳定化透镜单元4的移动范围和光学性能的降低的影响的情况下,即使望远端以外的另一变焦位置被设为基准,也没有问题。
第四实施例
以下,参照图19的说明图以及图20和21的流程图,描述在存在由于透镜装置自身导致的变焦期间的光轴的位置偏离和由于光学切换单元的各光学透镜插入了图像拍摄光路中导致的光轴的位置偏离的情况下的校正操作和透镜CPU 41的软件处理。
首先,参照图20,描述用于校正当光学切换单元5的光学透镜被切换到[2]的状态时的变焦期间的光轴的位置偏离的流程图。注意,当光学切换单元5的光学透镜处于[1]的状态时的变焦期间的位置偏离的校正操作与图12的校正操作相同,因此,在这里省略其描述。
图20的步骤901~步骤911的操作与图17的步骤701~步骤711的操作相同。具体地,当校正激活开关38为接通时,在[2]的状态中,透镜CPU 41存储望远端处的图像稳定化透镜单元4的位置作为基准位置([2]xt,[2]yt)。然后,透镜CPU 41将变焦位置切换到广角端,并且,存储广角端处的图像稳定化透镜单元4的移动位置([2]xw,[2]yw)。为了与后面描述的图21的操作区分开,对于校正激活,在这种情况下可执行不同的操作。该操作仅需要是不被操作者正常执行的操作并且可作为不同的校正激活被透镜CPU 41识别。以这种方式,透镜CPU 41可通过激活方法识别是否执行图20的操作,或者,是否执行后面描述的图21的校正透镜装置和图像拾取装置的安装误差的操作。此外,由于可仅将变焦期间的位置偏离提取为校正目标,因此,希望要在图20的校正操作中使用的图像拾取装置是关于透镜装置100的安装部分14精确地调整光轴的装置。
在图19中,在透镜装置自身存在变焦期间的光轴的偏离的情况下,当变焦位置在标记中心在望远端处与图像拍摄画面的中心对准之后移动到广角端时,在广角端处,标记偏离并且位于图19所示的位置。随后的步骤912~步骤917的操作与在[2]的状态中图12的步骤309~步骤314的操作相同。具体地,在[2]的状态中,透镜CPU 41在预定的变焦位置Zn处移动图像稳定化透镜单元4,并且,响应于预设开关39的输入信号,存储位置对准之后的移动位置。在透镜CPU 41重复该操作n次(这里,n代表整数)之后,透镜CPU 41读取各移动位置的坐标,并且导出近似多项式校正式f2,该多项式校正式表示穿过望远端([2]xt,[2]yt)和广角端([2]xw,[2]yw)并且还穿过接近在[2]的状态中的各变焦位置处的坐标([2]xn,[2]yn)的位置的曲线。导出的校正式被存储在存储器48中。最后,响应于关断校正激活开关38的输入命令,透镜CPU 41通过使用变焦操作环34使得操作命令的分配从图像稳定化透镜单元4的移动返回到作为正常图像拍摄操作的变焦透镜组2的移动。
随后,透镜CPU 41执行当光学切换单元5的光学透镜被切换到[2]的状态时获取[1]和[2]的状态之间的位置偏离差值的校正操作,但是,该操作与图16的操作相同,因此,在这里省略其描述。
为了与图20和21的校正流程区分开,对于校正激活,可执行与图20和21的操作不同的操作。该操作仅需要是不被操作者正常执行的操作。如图16的情况那样,由于可仅将由于光学切换单元的光学透镜的切换导致的位置偏离提取为校正目标,因此,希望在这种情况下要被使用的图像拾取装置是关于透镜装置100的安装部分14精确地调整光轴的装置。
以下,参照图21的流程图,描述在执行图20和图16的校正操作之后光学切换单元5的光学透镜处于[2]的状态时的由于透镜装置100和图像拾取装置200的安装误差导致的光轴的位置偏离的校正操作。注意,当光学切换单元5的光学透镜处于[1]的状态时的位置偏离的校正操作与图13的操作相同,因此,在这里省略其描述。
图21的步骤1001~步骤1014的操作与图17的步骤701~步骤713的操作基本上相同。具体地,当校正激活开关38为接通时,在光学切换单元5的光学透镜的[2]的状态下,透镜CPU 41存储望远端处的图像稳定化透镜单元4的位置作为基准位置([2]xt,[2]yt)。然后,在将变焦位置移动到广角端(步骤1011)之后,透镜CPU 41存储在图像稳定化透镜单元4移动以使标记与图像拍摄画面的中心对准之后图像稳定化透镜单元4的移动位置([2]xw,[2]yw)(步骤1012)。然后,透镜CPU 41计算存储于存储器48中的望远端处和广角端处的图像稳定化透镜单元4的移动位置之间的差值([2]xt-[2]xw,[2]yt-[2]yw)(步骤1013),并且如图17那样通过式(9)和(10)、基于该差值和变焦位置Zn的采样点的总数Z而获得光学切换单元5的光学透镜的[2]的状态下的中心位置处的校正系数k2(kx2,ky2)(步骤1014)。
然后,透镜CPU 41从存储器48读取在图16的校正操作中计算的[1]和[2]的状态之间的差值(xt-[2]xt,yt-[2]yt)(步骤1015)。随后,通过式(9)和(10)以及该差值,如式(11)和(12)表示的那样,透镜CPU 41获得[2]的状态中的变焦位置Zn处的图像稳定化透镜单元4的校正偏移量D3n(Dx3n,Dy3n)。
图21的步骤1001~步骤1014的处理与图17的步骤701~步骤713的处理的不同之处在于,在紧接在透镜CPU 41确认步骤1002(步骤702)中的校正激活之后,透镜CPU 41在步骤1003中读取存储于存储器48中的校正式(f2(Zn)=(fx2(Zn),fy2(Zn)))。然后,在图21的步骤1004和随后的步骤的处理中,透镜CPU 41以由校正式f2表示的与变焦位置(望远端和广角端)对应的校正量使图像稳定化透镜单元4位移,并且以位移之后的图像稳定化透镜单元4的位置为基准获得望远端处的图像稳定化透镜单元4的移动位置[2](xt,yt)和广角端处的图像稳定化透镜单元4的移动位置[2](xw,yw),这也是图21的处理和图17的处理之间的不同之处。
通过校正式f2,透镜CPU 41获得用于校正透镜装置100的变焦期间的位置偏离的图像稳定化透镜单元4的校正偏移量L2n(Lx2n,Ly2n)。
Lx2n=fx2(Zn) ...(13)
Ly2n=fy2(Zn) ...(14)
这里,Lx2n和Ly2n分别表示关于X方向和Y方向的校正偏移量,并且,fx2和fy2分别表示关于X方向和Y方向的校正式。随后,通过式(11)和(12)以及式(13)和(14),透镜CPU 41获得变焦位置Zn处的图像稳定化透镜单元4的最终校正偏移量D4n(Dx4n,Dy4n)(步骤1016)。
Dx4n=Lx2n+Dx3n ...(15)
Dy4n=Ly2n+Dy3n ...(16)
这里,Dx4n和Dy4n分别表示关于X方向和Y方向的校正偏移量。然后,透镜CPU 41在存储器48中存储所获得的校正系数k2以及所获得的校正偏移量Dx3n和Dy3n及Lx2n和Ly2n与最终校正偏移量Dx4n和Dy4n的设定式(步骤1017)。最终,响应于关断校正激活开关38的输入命令,透镜CPU 41通过使用变焦操作环34使得操作命令的分配从图像稳定化透镜单元4的移动返回到作为正常图像拍摄操作的变焦透镜组2的移动(步骤1018)。
关于在图20、图21和图16的位置偏离的校正之后执行的透镜CPU 41的软件处理,当用D4n替换要在图18的流程图中的步骤810中读取的校正偏移量时,可以执行相同的操作。因此,在这里省略其详细描述。
通过上述的操作过程,在可去除的透镜装置和图像拾取装置的组合中,可以调整和减少在切换光学切换单元时的透镜装置的变焦期间的光轴的位置偏离和由于图像拾取装置的安装误差导致的位置偏离。各校正操作被独立地执行,因此,例如,当在工厂中组装透镜装置时执行图20和图16的校正时,操作者仅需要在图像拍摄位置处执行图21的校正。注意,如在第一实施例中那样,在没有图像稳定化透镜单元4的移动范围和光学性能的降低的影响的情况下,即使望远端以外的另一变焦位置被设为基准,也没有问题。
第五实施例
以下,描述以多种组合相互连接透镜装置和图像拾取装置的情况。图22是透镜装置与多个图像拾取装置中的一个连接的情况的示意图。透镜装置500和图像拾取装置a 600通过安装/去除透镜装置和图像拾取装置的安装部分60相互连接。如果在透镜装置和图像拾取装置中使用相同的连接方法,那么其组合可以改变。因此,透镜装置500可与使用相同的连接方法的另一图像拾取装置b 700连接。当与图像拾取装置a 600连接时,图22的透镜装置500与图像拾取装置a 600一起被安装在装置基座800上,并且,通过使用分别被固定到装置基座800的操作臂的末端(distal end)附近的操作部分900,当在这种状态中拍摄图像时图22的透镜装置500被操作。当透镜装置500与图像拾取装置b 700连接时,透镜装置500与图像拾取装置a 600和装置基座800分开,并且,操作者(未示出)在肩扛透镜装置500的同时拍摄图像。当拍摄图像时,操作者操作对于透镜装置500的外周设置的操作环(未示出)。透镜装置500具有与图1的透镜装置100的内部配置相同的内部配置,并且包括用于校正在第一到第四实施例中描述的由于透镜装置和图像拾取装置的安装误差导致的光轴的位置偏离的功能和软件。此外,与图4A和图4B的变焦操作部分300类似,操作部分900包含用于校正位置偏离的操作部件。并且,透镜装置500、图像拾取装置a 600和图像拾取装置b 700各自包含通信单元,以由此传送和接收请求命令与信息,所述通信单元当透镜装置和图像拾取装置中的一个图像拾取装置相互连接时允许其内部CPU(未示出)通过诸如串行通信的通信链路来执行信息传送。考虑到透镜装置500与多个图像拾取装置中的一个连接的情况,透镜装置500在用作照相机信息存储单元的内部存储器(未示出)中存储用于与和透镜装置500连接的图像拾取装置对应的位置偏离的多个校正式。当各图像拾取装置和透镜装置500相互连接时,通过在第一到第四实施例中描述的校正操作来存储各校正式。当通过校正操作存储校正式时,从图像拾取装置接收后面描述的用作识别信息的识别号码,或者,使用图5的照相机号码输入单元49来输入识别号码。因此,当前与透镜装置500连接的图像拾取装置被识别。
图23是存储于透镜装置500的内部存储器中的各图像拾取装置的校正式的列表。当透镜装置500与图像拾取装置a 600连接时,透镜装置500的内部CPU选择校正式D(a),并且,当透镜装置500与图像拾取装置b 700连接时,选择校正式D(b)。此外,当透镜装置500与其它图像拾取装置中的一个连接时,内部CPU根据与图像拾取装置的连接而选择校正式。
以下,参照图24,描述选择校正式的流程图。
首先,为了识别当前与透镜装置500连接的图像拾取装置,透镜装置500的内部CPU通过用作照相机信息输入单元的串行端口将请求照相机识别信号的命令传送到图像拾取装置的内部CPU(步骤1101)。当接收到命令时,图像拾取装置的内部CPU通过串行端口将照相机识别信号传送到透镜装置500的内部CPU,并且,在透镜装置500侧读取识别号码(步骤1102)。然后,透镜装置500的内部CPU基于识别号码识别图像拾取装置,并且,选择从图23的列表所识别的图像拾取装置的校正式(步骤1103)。选择的校正式被用于第一到第四实施例中的每一个的校正操作。
通过上述的操作过程,即使透镜装置和图像拾取装置是可去除的并由此不能规定它们的组合,但是通过事先存储各图像拾取装置的校正式,也可根据透镜装置和图像拾取装置的各组合来执行校正。注意,在图24中,从图像拾取装置获取图像拾取装置的识别号码,但是,如果其通信单元不被设置,那么使用图5的照相机号码输入单元49来输入识别号码,并且,从图23的列表选择与输入号码对应的校正式。
虽然已参照示例性实施例说明了本发明,但应理解,本发明不限于所公开的示例性实施例。所附权利要求的范围应被赋予最宽的解释以包含所有这样的变更方式以及等同的结构和功能。
Claims (16)
1.一种透镜装置,包括:
变倍透镜单元,在变倍期间沿光轴方向移动;
图像稳定化透镜单元,能够沿与光轴垂直的方向移动;
图像稳定化驱动单元,用于驱动图像稳定化透镜单元;以及
图像稳定化控制器,用于控制图像稳定化驱动单元对于图像稳定化透镜单元的驱动,
其中,图像稳定化控制器控制图像稳定化驱动单元以移动图像稳定化透镜单元,以便减少在像面上的一个预定的点处形成的对象图像的位置偏离,所述位置偏离是由变倍透镜单元的移动导致的。
2.根据权利要求1的透镜装置,还包括存储单元,所述存储单元用于存储作为用于驱动图像稳定化透镜单元以防止发生位置偏离的移动量的校正偏移量,并且,所述校正偏移量是通过检测至少两个变倍位置而获得的,
其中,图像稳定化控制器基于存储于存储单元中的校正偏移量来控制图像稳定化驱动单元以移动图像稳定化透镜单元,以便防止发生位置偏离。
3.根据权利要求2的透镜装置,还包括:
光学切换单元,包含至少一个变倍光学系统;以及
切换驱动部分,用于沿与透镜装置的光轴垂直的方向驱动光学切换单元,以向透镜装置的光路插入所述至少一个变倍光学系统和从所述透镜装置的光路去除所述至少一个变倍光学系统,
其中,存储单元存储所述至少一个变倍光学系统不被插入透镜装置的光路中的情况下的校正偏移量和所述至少一个变倍光学系统被插入透镜装置的光路中的情况下的校正偏移量,以及
其中,图像稳定化控制器基于存储于存储单元中的校正偏移量来驱动图像稳定化透镜单元。
4.根据权利要求1的透镜装置,其中,所述像面上的一个预定的点包含被安装了所述透镜装置的图像拾取装置的成像面的中心。
5.根据权利要求1的透镜装置,其中,所述像面上的一个预定的点是透镜装置的光轴上的点。
6.根据权利要求1的透镜装置,还包括为了设定校正偏移量而驱动图像稳定化透镜单元的操作单元,所述操作单元被设置到要被用于透镜装置的变倍操作和透镜装置的焦点调整操作之一的操作部分上。
7.根据权利要求6的透镜装置,其中,所述操作单元包含:
校正激活单元,用于使用用于执行变倍操作的变倍操作单元和用于执行焦点调整操作的焦点调整操作单元中的一个作为为了设定校正偏移量而驱动图像稳定化透镜单元的图像稳定化透镜驱动操作单元,所述变倍操作单元和所述焦点调整操作单元被设置到所述操作部分上;和
存储操作单元,用作用于触发以在存储单元中存储被图像稳定化透镜驱动操作单元驱动的图像稳定化透镜单元的位置的操作单元。
8.根据权利要求2的透镜装置,还包括:
照相机信息输入单元,用于输入要被连接的图像拾取装置的识别信息;和
照相机信息存储单元,用于存储通过照相机信息输入单元输入的识别信息和与所述识别信息对应的图像稳定化透镜单元的校正偏移量,
其中,图像稳定化控制器选择与通过照相机信息输入单元输入的识别信息对应的图像稳定化透镜单元的校正偏移量,并且基于所选择的校正偏移量移动图像稳定化透镜单元的位置。
9.根据权利要求2的透镜装置,还包括:
通信单元,用于与和透镜装置连接的图像拾取装置通信;以及
照相机信息存储单元,用于存储与通过通信单元从图像拾取装置获取的照相机识别信息对应的图像稳定化透镜单元的校正偏移量,
其中,图像稳定化控制器选择与照相机识别信息对应的图像稳定化透镜单元的校正偏移量,并且基于所选择的校正偏移量偏移图像稳定化透镜单元的位置。
10.一种用于透镜装置的控制方法,所述透镜装置包括:在变倍期间沿光轴方向移动的变倍透镜单元,能够沿与光轴垂直的方向移动的图像稳定化透镜单元,用于驱动图像稳定化透镜单元的图像稳定化驱动单元,以及用于控制图像稳定化驱动单元对于图像稳定化透镜单元的驱动的图像稳定化控制器,
所述方法包括:
由所述图像稳定化驱动单元驱动所述图像稳定化透镜单元向基准位置移动;
通过检测至少两个变倍位置,获取校正偏移量,所述校正偏移量是用于驱动图像稳定化透镜单元以防止发生由变倍透镜单元的移动而导致的、在像面上的一个预定的点处形成的对象图像的位置偏离的移动量;
由所述图像稳定化控制器控制图像稳定化驱动单元以移动图像稳定化透镜单元,以便减小所述位置偏离。
11.根据权利要求10的控制方法,还包括:
将所述校正偏移量存储在透镜装置的存储单元中,以便被所述图像稳定化控制器从所述存储单元中读取。
12.根据权利要求11的控制方法,其中,在所述存储单元中存储的校正偏移量包括至少一个变倍光学系统不被插入透镜装置的光路中的情况下的校正偏移量和至少一个变倍光学系统被插入透镜装置的光路中的情况下的校正偏移量。
13.根据权利要求10的控制方法,其中,所述像面上的所述一个预定的点包含被安装了所述透镜装置的图像拾取装置的成像面的中心。
14.根据权利要求10的控制方法,其中,所述像面上的所述一个预定的点是透镜装置的光轴上的点。
15.根据权利要求10的控制方法,还包括:
通过使用照相机信息输入单元输入要被连接的图像拾取装置的识别信息;
在照相机信息存储单元中存储通过照相机信息输入单元输入的识别信息和与所述识别信息对应的图像稳定化透镜单元的校正偏移量;以及
通过所述图像稳定化控制器选择与通过照相机信息输入单元输入的识别信息对应的图像稳定化透镜单元的校正偏移量,并且基于所选择的校正偏移量来移动图像稳定化透镜单元的位置。
16.根据权利要求11的控制方法,还包括:
通过通信单元与和透镜装置连接的图像拾取装置通信;
在照相机信息存储单元中存储与通过所述通信单元从图像拾取装置获取的照相机识别信息对应的图像稳定化透镜单元的校正偏移量;
通过所述图像稳定化控制器选择与照相机识别信息对应的图像稳定化透镜单元的校正偏移量,并且基于所选择的校正偏移量来偏移图像稳定化透镜单元的位置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010168191A JP5572024B2 (ja) | 2010-07-27 | 2010-07-27 | レンズ装置 |
| JP2010-168191 | 2010-07-27 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN102346347A true CN102346347A (zh) | 2012-02-08 |
Family
ID=44510639
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2011102103028A Pending CN102346347A (zh) | 2010-07-27 | 2011-07-26 | 透镜装置和用于所述透镜装置的控制方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8860827B2 (zh) |
| EP (1) | EP2413185A1 (zh) |
| JP (1) | JP5572024B2 (zh) |
| CN (1) | CN102346347A (zh) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103853184A (zh) * | 2012-12-03 | 2014-06-11 | 天津市威风科技发展有限公司 | 陀螺仪稳定拍摄控制装置 |
| CN110235057A (zh) * | 2017-01-31 | 2019-09-13 | 卡尔蔡司显微镜有限责任公司 | 用于确定在变焦光学系统的移位路径上的偏差的方法和用于校正的方法以及图像拍摄装置 |
| CN111936928A (zh) * | 2018-01-31 | 2020-11-13 | Lg伊诺特有限公司 | 相机模块 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103636191B (zh) * | 2011-08-23 | 2016-11-02 | 松下电器产业株式会社 | 三维摄像装置、透镜控制装置 |
| WO2014171304A1 (ja) * | 2013-04-17 | 2014-10-23 | 富士フイルム株式会社 | 撮像装置、撮像装置駆動方法、撮像装置制御プログラム |
| JP6723452B2 (ja) * | 2017-06-21 | 2020-07-15 | 富士フイルム株式会社 | 撮像装置及び移動撮像装置 |
| WO2019161155A1 (en) * | 2018-02-19 | 2019-08-22 | Gentex Corporation | Imaging device for rearview assembly |
| JP2020160773A (ja) * | 2019-03-26 | 2020-10-01 | キヤノン株式会社 | 画像処理装置、撮像装置、画像処理方法およびプログラム |
| JP6775208B1 (ja) * | 2020-04-06 | 2020-10-28 | パナソニックIpマネジメント株式会社 | 撮像装置及び撮像システム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5587739A (en) * | 1993-03-26 | 1996-12-24 | Nikon Corporation | Variable magnification image taking device |
| JP3153273B2 (ja) * | 1991-08-01 | 2001-04-03 | オリンパス光学工業株式会社 | カメラ |
| US20050024504A1 (en) * | 2003-07-28 | 2005-02-03 | Koji Hoshi | Image-taking apparatus and optical adjustment method for image-taking apparatus |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10282400A (ja) * | 1997-04-04 | 1998-10-23 | Canon Inc | 撮影レンズシステム |
| JP2000221557A (ja) * | 1999-01-29 | 2000-08-11 | Matsushita Electric Ind Co Ltd | 像ブレ補正装置とそれを用いた撮影装置 |
| JP4579380B2 (ja) * | 2000-07-04 | 2010-11-10 | キヤノン株式会社 | 撮像装置及びレンズ装置 |
| JP4374763B2 (ja) * | 2000-10-26 | 2009-12-02 | フジノン株式会社 | テレビレンズ装置 |
| US6965394B2 (en) * | 2001-03-30 | 2005-11-15 | Koninklijke Philips Electronics N.V. | Remote camera control device |
| JP2006191181A (ja) * | 2004-12-28 | 2006-07-20 | Canon Marketing Japan Inc | 撮像装置、その制御方法及びその制御プログラム |
| US8019209B2 (en) * | 2005-09-30 | 2011-09-13 | Hoya Corporation | Optical axis correction apparatus of an imaging device, and optical axis correction method for an imaging device |
| JP2007104300A (ja) * | 2005-10-04 | 2007-04-19 | Canon Inc | 撮影装置 |
| JP2007271996A (ja) * | 2006-03-31 | 2007-10-18 | Canon Inc | レンズ装置およびカメラシステム |
| US8095000B2 (en) * | 2007-02-15 | 2012-01-10 | Panasonic Corporation | Camera system |
| JP5183348B2 (ja) * | 2008-08-05 | 2013-04-17 | キヤノン株式会社 | 撮像装置 |
-
2010
- 2010-07-27 JP JP2010168191A patent/JP5572024B2/ja not_active Expired - Fee Related
-
2011
- 2011-07-01 EP EP11005413A patent/EP2413185A1/en not_active Withdrawn
- 2011-07-20 US US13/186,529 patent/US8860827B2/en not_active Expired - Fee Related
- 2011-07-26 CN CN2011102103028A patent/CN102346347A/zh active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3153273B2 (ja) * | 1991-08-01 | 2001-04-03 | オリンパス光学工業株式会社 | カメラ |
| US5587739A (en) * | 1993-03-26 | 1996-12-24 | Nikon Corporation | Variable magnification image taking device |
| US20050024504A1 (en) * | 2003-07-28 | 2005-02-03 | Koji Hoshi | Image-taking apparatus and optical adjustment method for image-taking apparatus |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103853184A (zh) * | 2012-12-03 | 2014-06-11 | 天津市威风科技发展有限公司 | 陀螺仪稳定拍摄控制装置 |
| CN110235057A (zh) * | 2017-01-31 | 2019-09-13 | 卡尔蔡司显微镜有限责任公司 | 用于确定在变焦光学系统的移位路径上的偏差的方法和用于校正的方法以及图像拍摄装置 |
| CN110235057B (zh) * | 2017-01-31 | 2022-01-11 | 卡尔蔡司显微镜有限责任公司 | 确定机械偏差的方法和用于校正的方法以及图像拍摄装置 |
| CN111936928A (zh) * | 2018-01-31 | 2020-11-13 | Lg伊诺特有限公司 | 相机模块 |
| US11586007B2 (en) | 2018-01-31 | 2023-02-21 | Lg Innotek Co., Ltd. | Camera module having a plurality of sensing units |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012027378A (ja) | 2012-02-09 |
| EP2413185A1 (en) | 2012-02-01 |
| JP5572024B2 (ja) | 2014-08-13 |
| US8860827B2 (en) | 2014-10-14 |
| US20120026351A1 (en) | 2012-02-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102346347A (zh) | 透镜装置和用于所述透镜装置的控制方法 | |
| US4788596A (en) | Image stabilizing device | |
| JP2009241247A (ja) | ステレオ画像型検出移動装置 | |
| CN101551506B (zh) | 光学设备 | |
| US20030072570A1 (en) | Stereo camera and automatic convergence adjusting device | |
| EP3261329A1 (en) | Image capturing device | |
| CN104301600B (zh) | 影像处理装置及其控制方法 | |
| CN103676455B (zh) | 光学防震相机模组的自动调试方法及系统 | |
| CN103424850A (zh) | 可交换透镜、照相机以及照相机系统 | |
| JP2014021328A (ja) | 立体映像撮影システムに用いる光学装置 | |
| JPS61269572A (ja) | 撮像光学装置 | |
| US11233961B2 (en) | Image processing system for measuring depth and operating method of the same | |
| CN101762943B (zh) | 照相装置 | |
| JP2009180990A (ja) | カメラおよび交換レンズ | |
| CN105100581A (zh) | 变焦透镜装置 | |
| CN101762944B (zh) | 照相装置 | |
| CN104412147A (zh) | 显微镜摄像装置和显微镜摄像方法 | |
| JP2001036799A (ja) | 固定焦点型撮像装置の光学レンズ位置調整法およびその方法にかかるプログラムを記録したコンピュータ読み取り可能な記録媒体並びに固定焦点型撮像装置の光学レンズ位置調整装置 | |
| US11372316B2 (en) | Lens barrel, camera body, camera system | |
| WO2020013200A1 (ja) | 交換レンズ、及びカメラボディ | |
| US20110299163A1 (en) | Three-dimensional-camera lens system | |
| CN101995729B (zh) | 光学设备 | |
| JP2010266750A (ja) | 観察装置および観察システム | |
| JP5458521B2 (ja) | レンズ鏡筒、レンズ鏡筒の調整方法、光学装置、および光学装置の調整方法 | |
| JP7071059B2 (ja) | レンズ装置、撮像システム、およびレンズ装置の制御方法、制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20120208 |