CN102216144B - 具有隔离器的将旋转运动变换成线性运动的机构 - Google Patents
具有隔离器的将旋转运动变换成线性运动的机构 Download PDFInfo
- Publication number
- CN102216144B CN102216144B CN2009801461801A CN200980146180A CN102216144B CN 102216144 B CN102216144 B CN 102216144B CN 2009801461801 A CN2009801461801 A CN 2009801461801A CN 200980146180 A CN200980146180 A CN 200980146180A CN 102216144 B CN102216144 B CN 102216144B
- Authority
- CN
- China
- Prior art keywords
- translation
- motion
- transformed
- isolator
- component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0442—Conversion of rotational into longitudinal movement
- B62D5/0445—Screw drives
- B62D5/0448—Ball nuts
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/18—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying or interconverting oscillating or reciprocating motions
- F16H25/20—Screw mechanisms
- F16H25/24—Elements essential to such mechanisms, e.g. screws, nuts
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/18—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying or interconverting oscillating or reciprocating motions
- F16H25/20—Screw mechanisms
- F16H25/24—Elements essential to such mechanisms, e.g. screws, nuts
- F16H2025/2445—Supports or other means for compensating misalignment or offset between screw and nut
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/18—Mechanical movements
- Y10T74/18568—Reciprocating or oscillating to or from alternating rotary
- Y10T74/18576—Reciprocating or oscillating to or from alternating rotary including screw and nut
- Y10T74/1868—Deflection related
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/19—Gearing
- Y10T74/19642—Directly cooperating gears
- Y10T74/19698—Spiral
- Y10T74/19702—Screw and nut
- Y10T74/19744—Rolling element engaging thread
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Transmission Devices (AREA)
- Power Steering Mechanism (AREA)
Abstract
一种包括可线性移动的长形第一构件(32﹑44)以及能够可旋转地移动的第二构件(66)和第三构件(98)的将旋转运动变换成线性运动的机构(112),所述可线性移动的长形第一构件(32﹑44)具有纵向第一轴线(A)。第二构件(66)绕第一构件(32﹑44)可旋转地设置,并且限定第二轴线(C)并可绕其旋转。第三构件(98)环绕第一轴线(A)并且与第一构件(32﹑44)操作性地接合。第三构件(98)设置在第二构件(66)的中心空腔(68)中,并且具有叠置在第二构件内表面(82)上的轴向表面(116﹑118),所述叠置的表面(82﹑116﹑118)每个都限定一对对应的槽(86、120)中的一个,并且每个槽都环绕第一轴线(A)和第二轴线(C)。
Description
相关申请的交叉引用
本申请要求2008年9月19日提交的美国临时专利申请No.61/098,266的权益,该临时专利申请的公开内容在此通过引用并入本申请中。
背景技术
电力致动或电力助动转向系统包括将旋转运动变换成线性运动的机构-例如滚珠丝杠组件,所述转向系统提供动力帮助给转向组件-例如通过提供环绕并且以螺纹方式接合齿条的丝杠部分的螺母以便电动机使螺母产生的旋转将轴向力传递至齿条,从而帮助驾驶员使车辆转向。在滚珠丝杠组件中,螺母和丝杠是通过多个滚珠螺纹接合的,所述多个滚珠设置在螺纹或在滚珠螺母和滚珠丝杠中形成的滚珠槽中。然而,螺母或丝杠的挠曲可导致对准误差,而对准误差导致螺母和丝杠之间的高摩擦以及机构的过度磨损和破裂。
期望消除这种对准误差,同时保持机构的性能。
发明内容
本发明提供一种将旋转运动变换成线性运动的机构,所述机构包括具有纵向第一轴线的可线性地移动的长形第一构件。能够可旋转地移动的第二构件绕第一构件可旋转地设置并且限定第二轴线,所述第二构件可绕所述第二轴线旋转。第二构件具有内表面,介于所述内表面之间的是中心空腔,第一轴线和第二轴线穿过所述中心空腔延伸。能够可旋转地移动的第三构件环绕第一轴线并且操作性地与第一构件接合,第三构件绕第一轴线相对于第一构件的旋转运动引起第一构件沿第一轴线相对于第三构件的线性移动。第三构件设置在中心空腔中并且具有叠置在第二构件内表面上的轴向表面,所述叠置的表面每个都限定一对对应的槽中的一个,每个槽都环绕第一轴线和第二轴线。环形弹性隔离器构件设置在该对对应的槽中,并且在第二构件和第三构件之间的压缩中具有第一弹性变形。环形隔离器构件具有与该对对应的槽的表面的摩擦接合,并且第二和第三构件通过所述摩擦接合可旋转地联接。第三构件具有相对于第二构件的多个自由度,环形隔离器构件的第二弹性变形对抗第二和第三构件之间的相对移动。
上文描述的将旋转运动变换成线性运动的机构的隔离器构件以及能够可旋转地移动的第二和第三构件共同提供可与所述机构的第一构件分离的隔离器组件。
本发明还提供一种隔离器组件,该隔离器组件包括能够可旋转地移动的外壳,所述能够可旋转地移动的外壳限定外壳轴线并可绕该轴线旋转并且具有内表面,介于所述内表面之间的是中心空腔,所述外壳轴线延伸穿过所述中心空腔。隔离器组件还包括能够可旋转地移动的滚珠螺母,该滚珠螺母具有外壳轴线延伸穿过的孔,该滚珠螺母设置在中心空腔中并且具有叠层在外壳内表面上的相反轴向表面。叠置的表面每个都限定一对对应的槽中的一个,每个槽都环绕外壳轴线。环形弹性隔离器构件设置在每对对应的槽中,并且在外壳和滚珠螺母之间的压缩中具有第一弹性变形。每个环形隔离器构件都具有与它相应的所述一对对应槽的表面的摩擦接合,并且外壳和滚珠螺母通过所述摩擦接合可旋转地联接。滚珠螺母具有相对于外壳的多个自由度,环形隔离器构件的第二弹性变形对抗滚珠螺母和外壳之间的相对移动。
附图说明
通过结合附图参考下文的详细描述将会更好地理解本发明,也将容易地认识到本发明的优点,附图中:
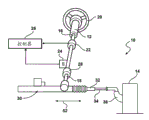
图1是用于车辆的转向系统的示意图;
图2是图1所示转向系统的一部分的示意图;
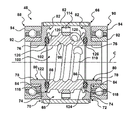
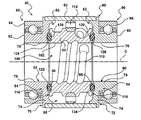
图3是图1所示转向系统的一部分的局部剖视图,图中示出了处于对准状态的该系统的滚珠丝杠组件,其中轴线A和轴线C共线;
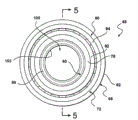
图4是图3所示滚珠螺母和隔离器组件的轴向端面图;
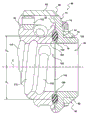
图5是图4所示隔离器组件和轴承的沿线5-5剖开的剖视图;
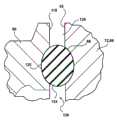
图6是图5所示隔离器组件的局部放大图,其中该弹性隔离器构件部分填充隔离器组件的环形空腔;
图7是隔离器组件的局部视图,其中该弹性隔离器构件完全填充隔离器组件的环形空腔;
图8是图7所示环绕部分8的放大图;
图9是类似于图5的剖视图,图中示出了结合到隔离器组件的外壳的轴承内圈;以及
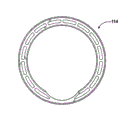
图10是隔离器组件的定心环的轴向端面图。
此外,应当指出,附图不一定是按比例绘制的,并且不一定按同一比例绘制。更具体地说,附图中某些元件的比例可能被严重夸大以突出这些元件的特性。在一个以上附图中示出的、可能具有类似构造的元件已使用相同的附图标记标示。
具体实施方式
参阅图1,图中示出了在车辆(未示出)中使用的转向系统10。转向系统10允许车辆操作者通过操纵转向柱12来控制车辆的方向。转向柱12机械地连接至车轮14(仅示出了一个)。
转向柱12包括上转向轴16和下转向轴18。方向盘20设置在上转向轴16处。方向盘20定位成使操作者可施加转向力至转向柱12。扭矩传感器22和位置传感器24定位在上转向柱轴16处以检测方向盘20的转动角度。扭矩传感器22和位置传感器24与控制器26电子连通。柱状万向接头28将上转向柱轴16联接至下转向柱轴18。下转向柱轴18在一端固定至柱状万向接头28,并且在另一端固定至转向齿轮组件30。齿轮组件30包括具有纵向轴线A的长形齿条32,所述长形齿条32沿所述纵向轴线A线性地平移。齿条32的相反的轴向两端通过转向连杆联接至车辆的车轮14,所述转向连杆包括横拉杆(仅示出了一个)34,每个横拉杆在一端固定至齿条32,并且在另一端固定至一对转向节36(仅示出了一个)中的一个。
转向齿轮组件30还包括与齿条32机械连接的小齿轮38。小齿轮38定位成与齿条32的匹配齿状部分40接触,而所述匹配齿状部分40沿着齿条32的一部分延伸。小齿轮38具有与匹配齿状部分40的齿接合的齿。小齿轮38与齿条32的匹配齿状部分40组合从而形成齿条和小齿轮组件42。齿条32还具有轴向延伸部分,沿着所述轴向延伸部分设置有以轴线A为中心的大体上柱状的滚珠丝杠部分44。匹配齿状部分40和滚珠丝杠部分44结合到齿条32中。滚珠丝杠44与可逆伺服电动机46机械连通,并且滚珠丝杠44和电动机46可沿着齿条32轴向定位在匹配齿状部分40的第一侧200或相反的第二侧202上。另外,电动机46可径向定位在齿条32的顶侧204或底侧206上。伺服电动机46的致动是通过控制器26控制的。
当车辆操作者转动方向盘20时,旋转力施加至转向柱12,且小齿轮38相应地旋转。小齿轮38的运动导致齿条32沿箭头52的方向轴向运动,继而操纵横拉杆34和转向节36以便改变车辆的车轮14的位置。因此,当转动方向盘20时,小齿轮38和匹配齿状部分40将方向盘20的旋转运动转换成齿条32的线性运动。为了帮助操作者将力施加至转向系统10,电动机46被通电并且通过滚珠丝杠44提供帮助齿条32运动的动力,从而帮助车辆操作者进行车辆转向。
参阅图3,可逆伺服电动机46能够通过滚珠螺母和隔离器的组件(此后也称为“隔离器组件”)48与滚珠丝杠44连通,所述滚珠螺母与隔离器的组件48绕滚珠丝杠44可旋转地设置并且可旋转地联接至电动机46。隔离器组件48是可与滚珠丝杠44和齿条32分离的部件并且装配于其上。轴50从电动机46与齿条32大体平行地延伸,并且当电动机46被通电时沿两个相反的角度方向中的一个方向旋转。轴50具有可旋转地固定至该轴50的传动带轮54并且由轴承56支撑。具有外表面(未示出)和内表面60的柔性环状传动皮带58卷绕在传动带轮54上以使皮带58的内表面60与该传动带轮54摩擦接触。皮带58还卷绕在从动带轮62上,所述从动带轮62限定隔离器组件48的外周以便皮带58的内表面60与带轮62摩擦接触。电动机46、轴50、皮带58、隔离器组件48以及齿条和小齿轮组件42可都包含在转向齿轮组件壳体64中。
参阅图3-5,带轮62限定中心轴线C并且包括隔离器组件48的柱状滚珠螺母外壳66的径向外表面,带轮62绕中心轴线C径向地定心。当电动机46被致动时,连接带轮54和62的皮带58的运动使滚珠螺母外壳66绕中心轴线C和滚珠丝杠44旋转。
滚珠螺母外壳66具有由带轮62以及第一和第二端盖70、72封闭的柱状中心空腔68。外壳66的第一端盖70附接至带轮62的一个轴向端并且外壳66的第二端盖72附接至带轮62的相反轴向端,第一端盖70和第二端盖72沿中心轴线C彼此分隔开。更具体地说,第一端盖70和第二端盖72每个都包括具有中心孔76并且相对于中心轴线C径向延伸的平面环形第一部分74。第一部分74的外周附接至带轮62的一个轴向端。第一端盖70和第二端盖72每个还包括沿着中心轴线C轴向延伸的柱状第二部分78,所述柱状第二部分78的轴向内端绕中心孔76附接至第一部分74。邻近的每对抵接的第一部分74和第二部分78限定孔80,孔80绕中心轴线C径向定心并且沿中心轴线C延伸并且延伸进入外壳的中心空腔68。第一端盖70和第二端盖72可通过压配合、焊接或为所属领域技术人员已知的其他任何适当的方法附接至带轮62以限定滚珠螺母外壳66。
第一滚珠螺母外壳端盖70和第二滚珠螺母外壳端盖72中的每个都具有轴向内表面82和反向的轴向外表面84。更具体地说,第一端盖70和第二端盖72的每个平面环形第一部分都具有内表面82和外表面84。如图所示,第一端盖70的内表面82以间隔关系沿中心轴线C面对第二端盖72的内表面82。
第一端盖70和第二端盖72中的每个的第一部分74都限定绕中心轴线C延伸并且在中心轴线C上径向定心的第一槽86,每个第一槽86都相对于中心轴线C彼此面对并且彼此对准。更具体地说,第一端盖70和第二端盖72中的每个的第一部分74的内表面82都限定第一槽86,所述第一槽86绕中心轴线C周向地延伸。下面将进一步论述第一槽86。
带轮54、62和滚珠螺母外壳66的端盖70、72可由任何类型的材料构造而成,包括黑色金属材料-例如冷轧钢材1020、塑料、或者轻质材料-例如铝合金或复合材料。显然,铝合金或塑料材料可有利于降低转向系统10的总体质量和惯性,从而改进响应性。如下面进一步描述的,优选地带轮62的内周表面直径被研磨以便提供与固定至隔离器组件48内的滚珠螺母的定心环的外直径的紧公差间隙。
再次参阅图3-5,类型在本领域中众所周知的两个角接触轴承88和90定位在滚珠螺母外壳66的相反侧上,邻近第一端盖70和第二端盖72。更具体地说,轴承88、90抵靠第一和第二端盖70、72的第一和第二部分74、78。轴承88、90的内圈92可轴向抵靠相应的第一端盖70和第二端盖72的径向部分74的外表面84,并且可滑动地设置在其柱状第二部分78上,以便相对于齿轮组件壳体64径向和轴向地支撑滚珠螺母外壳66,轴承外圈94装配在所述齿轮组件壳体64中。可选地,如图9所示,这些柱状第二部分78可被构造为自己形成轴承88、90的内圈92,以代替可滑动地接纳在第一和第二端盖70、72的柱状第二部分78上的轴承88、90的内圈92。
角接触轴承88和90支撑齿轮组件壳体64内的滚珠螺母外壳66并且允许滚珠螺母外壳66随着皮带58的运动而旋转。如图3所示,也可采用弹簧垫圈96-例如波形垫圈来调节角接触轴承88和90。可选地,其他类型的轴承-例如深沟球轴承也可用于替代角接触球轴承88和90。
滚珠螺母98设置在滚珠螺母外壳66的中心空腔68内,所述滚珠螺母98从带轮62以及第一和第二端盖70、72间隔开。滚珠螺母98具有延伸穿过所述滚珠螺母98的螺纹孔或开口100,所述螺纹孔或开口100由内部周向表面102限定,丝杠44穿过所述螺纹孔或开口100被接纳。在安装隔离器组件48到滚珠丝杠44上之前,滚珠螺母的孔100的中心轴线与外壳66的轴线C重合,随后当轴线C和轴线A共线时将隔离器组件48安装到滚珠丝杠44上。轴线C和轴线A的对准误差将迫使滚珠螺母98在外壳66内被重新定向,滚珠螺母的孔100的中心轴线与滚珠丝杠44的轴线A重新对齐。
滚珠螺母98的内部周向表面102可滑动地接合滚珠丝杠44的外部周向表面104。滚珠螺母的孔100自身大体上与齿轮组件30中的齿条轴线A通过柱状表面102和104的协作性滑动接合来对准。滚珠106以众所周知的方式设置在滚珠丝杠44的滚珠槽108以及相配的滚珠螺母98的滚珠槽110中,其中滚珠螺母设置有适当的众所周知的装置-例如转换管(未示出),其用于使滚珠106从槽110的一端再循环至另一端并且将球106存留在可旋转的滚珠螺母98的轴向长度内。由此,滚珠丝杠44和滚珠螺母98分别通过设置在它们相应的滚珠槽或螺纹108、110中的滚珠106螺纹接合。滚珠丝杠44和隔离器组件48一起提供将旋转运动变换成线性运动的机构或滚珠丝杠组件112。
如上所述,在机构112的无应力状态下,滚珠丝杠的轴线A通常与滚珠螺母外壳66的中心轴线C对准。更具体地说,滚珠丝杠轴44、外壳66和滚珠螺母98通常径向地定心在齿条轴线A以及共线的中心轴线C上。在现有的滚珠丝杠组件中,如果滚珠丝杠轴线和滚珠螺母轴线由于使其弯曲或轻微弯折的作用于齿条32上的应力而变得没有对准,那么在滚珠螺母上通常会产生很大的反作用负载,由此使滚珠丝杠和滚珠螺母之间的摩擦增大。齿轮组件30的滚珠螺母98能够在外壳66内沿着其中心轴线C轴向移动,并且还能够相对于中心轴线C在外壳66内径向移动并且相对于中心轴线C倾斜。换句话说,滚珠螺母98具有多个自由度以便补偿施加至滚珠螺母98的各种力和/或补偿轴线A和C的对准误差,以及补偿齿条32、隔离器组件48的滚珠螺母98和/或轴颈状外壳66之间的对准误差。
当机构112处于对准状态的情况下,第一端盖70和第二端盖72的孔80与沿着中心轴线C的滚珠螺母98的螺纹孔100以及延伸穿过孔80的滚珠丝杠轴44的纵向轴线A共线,并且孔100大体上与轴线C共线。滚珠螺母98在外壳66内的朝向随着齿条32受到应力作用时齿条32发生的挠曲运动而变化,这将会使轴线A和C由于滚珠螺母表面102和滚珠丝杠表面104之间的滑动表面接合而无法对准。
当机构112处于没有对准的状态时,在所述状态中齿条32的弯曲以及其他弹性变形导致轴线A和C不共线,滚珠螺母98相对于外壳66与滚珠丝杠44径向移动或枢转倾斜。在可察觉的水平内,这种对准误差可通过隔离器组件48被抵消。进一步,齿条32与齿轮组件壳体64之间沿箭头52方向的轴向反作用力将导致滚珠螺母98在外壳66内轴向位移,所述位移可发生在轴线A和C共线的对准状态中。在可察觉的水平内,其中滚珠螺母98相对于外壳66在轴向自由度上移动的这种轴向位移也通过隔离器组件48被抵消。这种对于对准误差和/或轴向挠曲的抵消是通过为滚珠螺母98提供自由度来实现的,在所提供的自由度中滚珠螺母98在外壳66内移动,同时维持两者之间的通过其传递扭矩的可旋转联接。
隔离器组件48为滚珠螺母98提供必须的自由度和刚度以允许隔离器组件48充分地操作,而不会引起滚珠螺母98与滚珠丝杠44之间的过度摩擦或失去对隔离器组件48的控制。采用低圆锥或小力矩弹簧系数以减少滚珠螺母98与滚珠丝杠44之间的摩擦,并且采用高轴向或大扭矩弹簧系数以保持对隔离器组件48的充分控制。换句话说,采用低刚度和/或小弹簧系数以降低隔离器组件48与滚珠丝杠44之间的摩擦,并且采用高轴向/大扭矩刚度和/或大弹簧系数以保持对隔离器组件48的充分控制。
定心环114以过盈配合安装至滚珠螺母98的外周并且径向地设置在滚珠螺母98与带轮62的内周表面之间。优选地,在定心环114的环形外围边缘与带轮62的内部周向柱状表面之间具有微小的周向间隙。例如,定心环114和带轮62可具有0.065mm的标称径向配合间隙。当轴线A和C变得径向分离从而导致滚珠螺母98与外壳66径向非同心程度变得超出所提供的径向间隙时,定心环114便施加径向负载至滚珠螺母98。由此,定心环114限制滚珠螺母98可偏离中心轴线C的径向范围并在外壳66内径向地对滚珠螺母98进行定心。定心环114是环形的并且位于垂直于滚珠螺母的孔100的中心轴线的平面中。定心环114沿着滚珠螺母98的长度轴向地定位成使得定心环114轴向地在空腔68内居中,并且由此因为轴线A与轴线C之间的相对倾斜,滚珠螺母98可在外壳66内、在环114的中心处或附近稍微枢转。定心环114可由聚合材料-例如聚酰胺(例如尼龙或玻璃纤维增强尼龙)或任何为所属领域技术人员已知的其他适当材料来形成。例如,定心环114可由到处都可以购买到的33%GFR尼龙6/6形成。如图10所示,定心环114的内径设置有容纳滚珠螺母转换管(未示出)的周向局部缺口。
滚珠螺母98可由SAE J404 8620H铝镇静钢形成,所述滚珠螺母先被硬化然后被研磨。滚珠螺母98包括第一面116和与该第一面116相反的第二面118,且更具体地第一面116和第二面118沿着中心轴线C彼此间隔开。第一端盖70的内表面82面对滚珠螺母98的第一面116,并且第二端盖72的内表面82面对滚珠螺母98的第二面118。滚珠螺母98的第一面116和第二面118中的每个都限定沿中心轴线C居中地延伸的环形第二槽120,第二槽120沿中心轴线C彼此对准。更具体地说,第一端盖70的第一槽86与滚珠螺母98的第一面116的第二槽120对准,并且第二端盖72的第一槽86与滚珠螺母98的第二面118的第二槽120对准。如针对第一槽86类似地描述的,第二槽120绕中心轴线C周向延伸。环形空腔126由每个对应的一对第一槽86和第二槽120限定并且可具有构造成理想椭圆的横截面。应当理解的是,每个叠置的一对第一槽86和第二槽120限定环形空腔126,尽管环形空腔由于将叠置的滚珠螺母表面116、118与面向内的端盖表面82分隔开的间隙128而具有非连续的壁。进一步,应当理解的是,每个环形空腔126都可具有另一合适的横截面构造-例如圆形、椭圆形、矩形、梯形、槽形等。第一槽86和第二槽120与设置在其中的弹性隔离器构件结合,从而提供如下面进一步描述的高轴向刚度和/或大扭矩刚度的隔离器组件48。
如图5最清楚看到的,第一弹性隔离器构件122设置在滚珠螺母98的第一面116与第一端盖70的内表面82之间,并且第二弹性隔离器构件124设置在滚珠螺母98的第二面118与第二端盖72的内表面82之间。更具体地说,第一隔离器构件122设置在第一端盖70的内表面82的第一槽86与滚珠螺母98的第一面116的第二槽120之间,并且此外第二隔离器构件124设置在第二端盖72的内表面82的第一槽86与滚珠螺母98的第二面118的第二槽120之间。第一隔离器构件122和第二隔离器构件124彼此轴向对准并且相对于中心轴线C同心从而在滚珠螺母98与隔离器组件48的外壳66之间提供均布负载。
第一隔离器构件122和第二隔离器构件124每个都可限定成弹性O形环。在它们自然的未压缩状态下,第一隔离器构件122和第二隔离器构件124可限定具有圆形构造的横截面。应当理解的是,第一O形环122和第二O形环124可限定任何其他适当的横截面构造-例如矩形、正方形、三角形等。第一隔离器构件122和第二隔离器构件124通常由聚合材料-例如氟碳材料-例如可从Parker Hannifin 公司商购的VM835或任何其他适当的弹性材料来形成,以便第一隔离器构件122和第二隔离器构件124可压缩并且当未压缩时可恢复至它们的原始构造。换句话说,第一隔离器构件122和第二隔离器构件124具有如弹簧般的特性,以便第一隔离器构件122和第二隔离器构件124在被压缩时不会永久变形。此外,隔离器构件122、124还具有材料特性和表面精度特性,所述材料特性和表面精度特性适用于将槽86、120的抵接表面摩擦地接合并且从内部抵消剪切应力,以便于通过构件122、124在外壳66与滚珠螺母98之间进行扭矩传递。隔离器构件122、124承载与外壳66施加至滚珠螺母98的扭矩相等的剪切负载,并且当滚珠螺母98相对于外壳66在角自由度中移动时,该剪切应力会使构件122、124经历剪切变形。通过该剪切变形,隔离器组件48给滚珠螺母98提供相对于外壳66的有限的旋转自由度。可在外壳66与滚珠螺母98之间传递的扭矩量由扭矩阈值来限定,在所述扭矩阈值下构件122、124与它们对应的环形空腔126的壁之间的最大摩擦接合被克服并且产生滑动。
当装配隔离器组件48时,第一隔离器构件122和第二隔离器构件124设置在环形空腔126中并且压缩在滚珠螺母98与第一和第二端盖70、72之间以实现期望的负载。更具体地说,如图5-9最清楚示出的,第一隔离器构件122和第二隔离器构件124在它们对应的成对匹配的第一槽86和第二槽120内被变形地压缩。由此,在装配隔离器组件48时,弹性隔离器构件122、124具有在外壳66与滚珠螺母98之间受压的第一弹性变形。应当理解的是,第一隔离器构件122和第二隔离器构件124可被压缩,以使它们弹性变形从而大体上填充如图7和8所示的它们相应的第一槽86和第二槽120的整个容积、或如图6所示仅部分填充它们相应的第一槽86和第二槽120。使第一隔离器构件122和第二隔离器构件124填充它们相应的成对匹配的第一槽86和第二槽120的整个容积会增加隔离器组件48的模量或刚度。
通过使第一隔离器构件122和第二隔离器构件124相对于中心轴线C居中来实现期望的隔离器组件48的圆锥或力矩弹簧系数。进一步,通过减小第一隔离器构件122和第二隔离器构件124相对于中心轴线C的力矩臂,将滚珠螺母98上的反作用力矩降低。换句话说,如图6和7所示,通过减小距离D1以使第一隔离器构件122和第二隔离器构件124定位在远离中心轴线C处,从而将第一隔离器构件122和第二隔离器构件124的反作用力矩降低。应当理解的是,虽然距离D1仅示出为用于第二隔离器构件124,但是隔离器组件48包括用于第一隔离器构件122的大体相同的距离D1。可通过改变第一和第二隔离器构件122、124的横截面构造和/或直径、第一和第二隔离器构件122、124的标称直径(2×D1)、第一和第二隔离器构件122、124的肖式硬度或硬度和/或第一和第二槽86、120的构造或容积,而使锥形或力矩弹簧系数改变。
由此,应当理解的是,第一隔离器构件122和第二隔离器构件124具有在装配隔离器组件48期间获得的第一弹性变形,在该情况下滚珠螺母孔100的中心轴线(大体上与滚珠丝杠轴线A重合)与外壳中心轴线C共线,滚珠螺母98在外壳66的空腔68内大体上轴向居中并且外壳66与滚珠螺母98之间没有可察觉的扭矩传递。还应理解的是,滚珠螺母98相对于外壳66在它的多个自由度中的任一自由度中的移动,无论是通过轴线A与轴线C的平行间隔或非平行倾斜(反映轴线A与轴线C之间的非对准状态) 相对于轴线C的径向移动,还是沿轴线C的轴向移动(反映滚珠螺母98朝外壳端盖70和72的轴向移动)和/或绕轴线C的有角度移动(反映外壳66与滚珠螺母98之间的扭矩传递),都通过环形隔离器构件122、124的第二弹性变形来对抗。
参阅图1-3,转向系统10具有包括将旋转运动变换成线性运动的机构112的转向齿轮组件30,所述转向系统10的操作如下。当车辆操作者转动方向盘20时,扭矩传感器22和位置传感器24检测方向盘20的转向角度。扭矩传感器22和位置传感器24发送信号至控制器26,所述控制器26随后提供控制信号至电动机46,而所述电动机46沿两个相反方向中的一个方向旋转。在这样旋转的情况下,电动机46通过轴50提供扭矩至带轮54。带轮54的旋转扭矩通过皮带58传递至隔离器组件48的带轮62。备选地,可通过链条系统或齿轮系统来代替皮带58和带轮54、62为滚珠螺母外壳66提供旋转扭矩。相应地,电动机46、轴50、带轮54和62以及皮带58提供通过带轮54和62相对彼此的尺寸(例如它们的传动比)来确定的旋转-至-旋转转换。如上所述,带轮62限定滚珠螺母外壳66的外周表面。备选地,独立带轮62可绕滚珠螺母外壳66的外表面设置并且可旋转地固定至滚珠螺母外壳66的外表面。
通过皮带58施加至带轮62的产生扭矩的力使滚珠螺母外壳66旋转。隔离器构件122、124与滚珠螺母外壳66的槽86和滚珠螺母98的槽120之间的摩擦在其间传递所施加的扭矩,该扭矩使滚珠螺母98旋转。通过滚珠106与将旋转转换成线性运动的机构112的滚珠槽108和110的相互作用,滚珠螺母98上的旋转力被转换成滚珠丝杠44上的线性力,该线性力迫使齿条32产生线性移动从而通过齿条和小齿轮组件42的将旋转运动变换成线性运动的致动帮助将该力施加至齿条32。当滚珠螺母98旋转时,滚珠丝杠44与滚珠螺母98接合,该接合使该滚珠丝杠44沿线性方向移动。滚珠丝杠44的移动对应地沿轴线A在线性方向上沿箭头52的方向移动齿条32或帮助齿条32在所述方向上移动。当然,齿条32的移动方向对应于传动带轮54的受控旋转方向。
图1和2中示出了助力转向系统10,上面描述了该系统10的操作,系统10包括通过齿条和小齿轮组件42在方向盘20和齿条32之间提供的机械连接。可选择地,在“线控转向”系统中没有这种在方向盘20与齿条32之间的机械连接。在这种系统中,类似感测到的由驾驶员施加的方向盘20的旋转运动(和/或来自等同驾驶员控制装置的信号)输入到控制器26中,同时电动机46提供必要的力以操纵齿条32。由此,上述将旋转运动变换成线性运动的机构112可类似地用于线控转向系统中。另外,同样重要的是还应指明,尽管已经描述的机构112是结合到转向系统中,该机构112或该机构112的隔离器组件48可有益地结合到任何可采用滚珠丝杠组件的机构中。
隔离器组件48提供额外的自由度给结合到任何类型的机构中的滚珠丝杠组件,所述机构包括转向机构。隔离器组件48可通过允许齿条32和滚珠丝杠44在任何方向上-包括轴向、扭转、有角度地和/或径向地挠曲来提供自由度给转向机构,同时提供可接受的负载承载能力并且不会使轴承88、90和将旋转运动变换成线性运动的机构或滚珠丝杠组件112过载。另外,可通过控制抗扭刚度、轴向刚度和径向刚度来控制齿条32和将旋转运动变换成线性运动的机构112的振动和挠曲以获得期望的结果,其中所述刚度控制是通过隔离器构件122、124的材料选择和结构配置以及环形空腔126的设计来实现的。
虽然已经参照优选实施方式描述了本发明,但是所属领域技术人员将会理解的是,在不偏离本发明的范围的情况下,可对本发明做出各种改变并且可用等同元件来代替本发明的元件。另外,在不偏离本发明的实质范围的情况下,可做出多种改型以使本发明教导适应特定情况或材料。因此,本发明将不局限于所公开的特定实施方式,相反,本发明将包括落入所附权利要求范围内的所有实施方式。
Claims (20)
1.一种将旋转运动变换成线性运动的机构(112),所述机构包括:
具有纵向第一轴线(A)的可线性移动的长形第一构件(32﹑44);
绕所述第一构件(32﹑44)可旋转地设置的能够可旋转地移动的第二构件(66),所述第二构件(66)限定第二轴线(C)并可绕所述第二轴线(C)旋转并且具有内表面(82),介于所述内表面(82)之间的是中心空腔(68),所述第一轴线(A)和所述第二轴线(C)延伸穿过所述中心空腔(68);
环绕所述第一轴线(A)并且与所述第一构件(32﹑44)操作性接合的能够可旋转地移动的第三构件(98),所述第三构件(98)绕所述第一轴线(A)相对于所述第一构件(32﹑44)的旋转运动引起所述第一构件(32﹑44)沿所述第一轴线(A)相对于所述第三构件(98)的线性移动,所述第三构件(98)设置在所述中心空腔(68)中,所述第三构件(98)具有相对于所述第二构件(66)的多个自由度,所述第三构件(98)具有叠置在所述第二构件内表面(82)上的轴向表面(116﹑118),所述叠置的表面(82、116、118)每个都限定一对对应的槽(86﹑120)中的一个,所述槽(86﹑120)中的每个都环绕所述第一轴线(A)和所述第二轴线(C);以及一对环形弹性隔离器构件(122﹑124),其设置在所述一对对应的槽(86﹑120)中,
其特征在于,
每个隔离器构件(122﹑124)包括在所述第二构件(66)和所述第三构件(98)之间的压缩中的第一弹性变形并与所述一对对应的槽(86﹑120)的表面的摩擦接合,所述第二构件(66)和所述第三构件(98)通过所述摩擦接合可旋转地联接,所述环形隔离器构件(122﹑124)的第二弹性变形对抗所述第二构件(66)和所述第三构件(98)之间的相对移动。
2.如权利要求1所述的将旋转运动变换成线性运动的机构(112),其中所述能够可旋转地移动的第二构件(66)和所述能够可旋转地移动的第三构件(98)以及所述隔离器构件(122﹑124)包括可与所述第一构件(32﹑44)分离的隔离器组件(48)。
3.如权利要求1所述的将旋转运动变换成线性运动的机构(112),其中当所述第二构件(66)绕所述第二轴线(C)旋转时,所述第三构件(98)可绕所述第一轴线(A)旋转。
4.如权利要求1所述的将旋转运动变换成线性运动的机构(112),其中所述叠置表面(82﹑116﹑118)通过它们之间的间隙(128)分隔开,所述隔离器构件(122﹑124)穿过所述间隙(128)。
5.如权利要求1所述的将旋转运动变换成线性运动的机构(112),其中所述一对对应的槽(86、120)限定大体上环形的空腔(126),所述隔离器构件(122﹑124)设置在所述环形空腔(126)中。
6.如权利要求5所述的将旋转运动变换成线性运动的机构(112),其中所述环形空腔(126)限定大体上椭圆形的横截面。
7.如权利要求5所述的将旋转运动变换成线性运动的机构(112),其中所述弹性变形的隔离器构件(122﹑124)仅部分填充所述环形空腔(126)。
8.如权利要求5所述的将旋转运动变换成线性运动的机构(112),其中所述弹性变形的隔离器构件(122﹑124)大体上完全填充所述环形空腔(126)。
9.如权利要求1所述的将旋转运动变换成线性运动的机构(112),还包括由所述第一构件(32、44)限定的外周表面(104)和由所述第三构件(98)限定的内周表面(102),所述外周表面(104)与所述内周表面(102)可滑动地接合,并且其中所述机构(112)具有对准状态和非对准状态,所述第一轴线(A)和所述第二轴线(C)在所述对准状态下是共线的,但在所述非对准状态下是不共线的,当所述机构(112)在它的所述对准状态和所述非对准状态之间移动时,所述第三构件(98)随着所述第一构件(32﹑44)并且相对于所述第二构件(66)移动。
10.如权利要求9所述的将旋转运动变换成线性运动的机构(112),其中所述第一构件(32﹑44)和所述第三构件(98)彼此之间以螺纹方式接合。
11.如权利要求10所述的将旋转运动变换成线性运动的机构(112),还包括多个滚珠(106)以及设置在所述外周表面(104)和所述内周表面(102)中的相应的配合槽(108﹑110),所述滚珠(106)设置在所述配合槽(108﹑110)中,并且其中所述第一构件(32﹑44)和所述第三构件(98)通过所述滚珠(106)和所述配合槽(108﹑110)以螺纹方式接合。
12.如权利要求1所述的将旋转运动变换成线性运动的机构(112),其中所述第二构件(66)包括设置在一对端盖(70﹑72)之间的柱状中心部分(62),每个所述端盖(70﹑72)都具有相对于所述中心部分(62)轴向向外延伸的柱状部分(78),所述中心部分(62)具有大于每个所述端盖的柱状部分(78)的直径,所述中心部分(62)和所述端盖的柱状部分(78)径向地绕所述第二轴线(C)居中,每个所述端盖(70﹑72)都具有相对于所述第二轴线(C)从每个所述端盖的柱状部分 (78)的外部柱状壁径向向外延伸到所述柱状中心部分(62)的壁部分(74),所述端盖的壁部分(74)和所述中心部分(62)限定所述中心空腔(68)。
13.如权利要求12所述的将旋转运动变换成线性运动的机构(112),其中所述第二构件中心部分(62)具有柱状内表面,并且该机构(112)还包括固定至所述第三构件(98)的定心环(114),所述定心环(114)位于大体上垂直于所述第一轴线(A)的平面中并且在所述第三构件(98)的相反轴向端面(116﹑118)之间大体居中地轴向定位,所述定心环(114)具有外周边,所述外周边与所述第二构件中心部分(62)的所述柱状表面径向地分隔开。
14.如权利要求12所述的将旋转运动变换成线性运动的机构(112),其中所述第二构件端盖壁部分(74)限定所述内表面(82),介于所述内表面(82)之间的是所述中心空腔(68),并且所述一对对应的槽(86﹑120)中的一个限定在每个所述第二构件端盖壁部分(74)中。
15.如权利要求12所述的将旋转运动变换成线性运动的机构(112),还包括具有绕每个所述第二构件端盖柱状部分(78)设置的可相对旋转的内圈(92)和外圈(94)的轴承(88﹑90),所述第二构件(66)可相对于所述轴承外圈(94)旋转。
16.如权利要求15所述的将旋转运动变换成线性运动的机构(112),其中每个所述轴承(88﹑90)都具有可滑动地接纳到所述第二构件端盖柱状部分(78)上的内圈(92)。
17.如权利要求15所述的将旋转运动变换成线性运动的机构(112),其中所述第二构件端盖柱状部分(78)限定所述轴承内圈(92)。
18.一种组合装置,该组合装置包括如权利要求1所述的将旋转运动变换成线性运动的机构(112)、包括所述第一构件(44)的可线性移动的齿条(32)和可操作地与所述第二构件(66)接合的能够可逆旋转的电动机(46),其中所述第一构件(44)沿所述第一轴线(A)相对于所述第三构件(98)的线性移动迫使所述齿条(32)线性移动,而所述第一构件(44)的线性移动是由所述第三构件(98)绕所述第一轴线(A)相对于所述第一构件(44)的旋转运动引起的。
19.一种组合装置,该组合装置包括如权利要求1所述的将旋转运动变换成线性运动的机构(112)、包括所述第一构件(44)的可线性移动的齿条(32)、与所述第二构件(66)可操作地接合的能够可逆旋转的电动机(46)以及包括小齿轮(38)和所述齿条(32)的匹配齿状部分(40)的齿条和小齿轮组件(42),所述小齿轮(38)和齿状部分(40)的齿彼此接合,其中所述小齿轮(38)的旋转以及所述第一构件(44)沿所述第一轴线(A)相对于所述第三构件(98)的线性移动迫使所述齿条(32)线性移动,而所述第一构件(44)的线性移动是由所述第三构件(98)绕所述第一轴线(A)相对于所述第一构件(44)的旋转运动引起的。
20.一种在将旋转运动变换成线性运动的机构(112)中与滚珠丝杠(44)一起使用的隔离器组件(48),所述隔离器组件(48)包括:
限定外壳轴线(C)的能够可旋转地移动的外壳(66),所述能够可旋转地移动的外壳(66)可绕所述外壳轴线(C)旋转并且具有内表面(82),介于所述内表面(82)之间的是中心空腔(68),所述外壳轴线(C)延伸穿过所述中心空腔(68);
具有孔(100)的能够可旋转地移动的滚珠螺母(98),所述外壳轴线(C)穿过所述孔(100)延伸,所述滚珠螺母(98)设置在所述中心空腔(68)中,所述滚珠螺母(98)具有叠置在所述外壳内表面(82)上的相反轴向表面(116﹑118),所述叠置的表面(82﹑116﹑118)每个都限定一对对应的槽(86﹑120)中的一个,所述槽(86﹑120)中的每个都环绕所述外壳轴线(C);以及
环形弹性隔离器构件(122﹑124),其设置在每个所述一对对应的槽(86﹑120)中,并且在所述外壳(66)与所述滚珠螺母(98)之间的压缩中具有第一弹性变形,每个所述环形隔离器构件(122﹑124)具有与它相应的所述一对对应的槽(86﹑120)的表面的摩擦接合,所述外壳 (66)和所述滚珠螺母(98)通过所述摩擦接合可旋转地联接,所述滚珠螺母(98)具有相对于所述外壳(66)的多个自由度,所述环形隔离器构件(122﹑124)的第二弹性变形对抗所述外壳(66)与所述滚珠螺母(98)之间的相对移动。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US9826608P | 2008-09-19 | 2008-09-19 | |
| US61/098266 | 2008-09-19 | ||
| PCT/US2009/057456 WO2010033788A1 (en) | 2008-09-19 | 2009-09-18 | Rotary-to-linear mechanism having an isolator |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN102216144A CN102216144A (zh) | 2011-10-12 |
| CN102216144B true CN102216144B (zh) | 2013-10-16 |
Family
ID=42039886
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2009801461801A Expired - Fee Related CN102216144B (zh) | 2008-09-19 | 2009-09-18 | 具有隔离器的将旋转运动变换成线性运动的机构 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8479605B2 (zh) |
| EP (1) | EP2344372B1 (zh) |
| CN (1) | CN102216144B (zh) |
| PL (1) | PL2344372T3 (zh) |
| WO (1) | WO2010033788A1 (zh) |
Families Citing this family (70)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4371430B2 (ja) * | 2007-03-12 | 2009-11-25 | 株式会社アボム | 循環路を備えたボールねじ装置と、その製造方法 |
| DE102009016199B4 (de) * | 2009-04-03 | 2019-05-09 | Schaeffler Technologies AG & Co. KG | Kugelmutter und Kugelgewindetrieb |
| DE102009045857A1 (de) * | 2009-10-20 | 2011-04-21 | Robert Bosch Gmbh | Verfahren zur Herstellung einer Spindel für einen Spindeltrieb, Wälzgewindetrieb mit einer solchen Spindel und Verwendung des Wälzgewindetriebs |
| DE102010003233A1 (de) * | 2010-03-25 | 2011-09-29 | Zf Lenksysteme Gmbh | Servolenkung |
| DE102010029266A1 (de) * | 2010-05-25 | 2011-12-01 | Zf Lenksysteme Gmbh | Kugelumlaufgetriebe |
| DE102011003562A1 (de) * | 2011-02-03 | 2012-08-09 | Ford Global Technologies, Llc | Kugelgewindetrieb und damit ausgestattete Lenkeinrichtung |
| DE102011117723B4 (de) * | 2011-11-07 | 2015-01-08 | Thyssenkrupp Presta Aktiengesellschaft | Kugelgewindetrieb mit Lagerausgleich |
| US9062739B2 (en) * | 2011-11-08 | 2015-06-23 | Delaware Capital Formation, Inc. | Electric cylinder |
| JP5780429B2 (ja) * | 2011-11-16 | 2015-09-16 | 株式会社ジェイテクト | 車両用操舵装置 |
| KR101454505B1 (ko) * | 2011-11-17 | 2014-10-28 | 주식회사 만도 | 랙구동형 동력 보조 조향장치 |
| TWI444543B (zh) * | 2011-11-28 | 2014-07-11 | Hiwin Tech Corp | Internal recirculating ball screw |
| DE102011056025A1 (de) * | 2011-12-05 | 2013-06-06 | Zf Lenksysteme Gmbh | Kugelgewindetrieb |
| JP6115757B2 (ja) * | 2012-02-17 | 2017-04-19 | 株式会社ジェイテクト | 車両用操舵装置 |
| CN103252678B (zh) * | 2012-08-31 | 2016-01-13 | 天津市天工伟业数控机床有限公司 | 滚珠丝杆防晃装置 |
| US9637164B2 (en) | 2012-09-28 | 2017-05-02 | Steering Solutions Ip Holding Corporation | Nylon resin driven pulley |
| US9487231B2 (en) * | 2013-11-26 | 2016-11-08 | Steering Solutions Ip Holding Corporation | Tie rod force sensing systems and methods |
| US9550518B2 (en) * | 2013-12-31 | 2017-01-24 | Trw Automotive U.S. Llc | Electric power steering assembly |
| EP2907730B1 (en) | 2014-01-29 | 2017-09-06 | Steering Solutions IP Holding Corporation | Hands on steering wheel detect |
| DE102014008329A1 (de) * | 2014-06-12 | 2015-12-17 | Siemens Aktiengesellschaft | Getriebe zur Umwandlung einer rotatorischen Bewegung in eine lineare Bewegung |
| US9726267B2 (en) * | 2014-07-29 | 2017-08-08 | Raytheon Company | Relative translation system |
| JP2016055830A (ja) * | 2014-09-12 | 2016-04-21 | 株式会社ショーワ | 操舵装置 |
| KR102189712B1 (ko) * | 2014-10-28 | 2020-12-14 | 현대모비스 주식회사 | 전동식 파워 스티어링 시스템용 감속장치 |
| US10351159B2 (en) | 2015-05-01 | 2019-07-16 | Steering Solutions Ip Holding Corporation | Retractable steering column with a radially projecting attachment |
| US10589774B2 (en) | 2015-05-01 | 2020-03-17 | Steering Solutions Ip Holding Corporation | Counter rotation steering wheel |
| US9919724B2 (en) | 2015-05-29 | 2018-03-20 | Steering Solutions Ip Holding Corporation | Retractable steering column with manual retrieval |
| US11560169B2 (en) | 2015-06-11 | 2023-01-24 | Steering Solutions Ip Holding Corporation | Retractable steering column system and method |
| US10343706B2 (en) | 2015-06-11 | 2019-07-09 | Steering Solutions Ip Holding Corporation | Retractable steering column system, vehicle having the same, and method |
| DE102016110791A1 (de) | 2015-06-15 | 2016-12-15 | Steering Solutions Ip Holding Corporation | Gestensteuerung für ein einfahrbares Lenkrad |
| US10577009B2 (en) | 2015-06-16 | 2020-03-03 | Steering Solutions Ip Holding Corporation | Retractable steering column assembly and method |
| US9828016B2 (en) | 2015-06-24 | 2017-11-28 | Steering Solutions Ip Holding Corporation | Retractable steering column system, vehicle having the same, and method |
| US20160375931A1 (en) | 2015-06-25 | 2016-12-29 | Steering Solutions Ip Holding Corporation | Rotation control system for a steering wheel and method |
| DE102016111473A1 (de) | 2015-06-25 | 2016-12-29 | Steering Solutions Ip Holding Corporation | Stationäre lenkradbaugruppe und verfahren |
| US10112639B2 (en) | 2015-06-26 | 2018-10-30 | Steering Solutions Ip Holding Corporation | Vehicle steering arrangement and method of making same |
| US9840271B2 (en) | 2015-06-29 | 2017-12-12 | Steering Solutions Ip Holding Corporation | Retractable steering column with rake limiter |
| US9849904B2 (en) | 2015-07-31 | 2017-12-26 | Steering Solutions Ip Holding Corporation | Retractable steering column with dual actuators |
| US9845106B2 (en) | 2015-08-31 | 2017-12-19 | Steering Solutions Ip Holding Corporation | Overload protection for belt drive mechanism |
| KR101783100B1 (ko) * | 2015-10-05 | 2017-09-28 | 주식회사 만도 | 랙구동형 동력 보조 조향장치 |
| US10160472B2 (en) | 2015-10-20 | 2018-12-25 | Steering Solutions Ip Holding Corporation | Steering column with stationary hub |
| US9809155B2 (en) | 2015-10-27 | 2017-11-07 | Steering Solutions Ip Holding Corporation | Retractable steering column assembly having lever, vehicle having retractable steering column assembly, and method |
| US10029725B2 (en) | 2015-12-03 | 2018-07-24 | Steering Solutions Ip Holding Corporation | Torque feedback system for a steer-by-wire vehicle, vehicle having steering column, and method of providing feedback in vehicle |
| US10496102B2 (en) | 2016-04-11 | 2019-12-03 | Steering Solutions Ip Holding Corporation | Steering system for autonomous vehicle |
| DE102017108692B4 (de) | 2016-04-25 | 2024-09-26 | Steering Solutions Ip Holding Corporation | Steuerung einer elektrischen Servolenkung unter Verwendung von Systemzustandsvorhersagen |
| US10351161B2 (en) | 2016-05-27 | 2019-07-16 | Steering Solutions Ip Holding Corporation | Steering column with manual retraction |
| US10421476B2 (en) | 2016-06-21 | 2019-09-24 | Steering Solutions Ip Holding Corporation | Self-locking telescope actuator of a steering column assembly |
| DE102016007542A1 (de) | 2016-06-22 | 2017-12-28 | Thyssenkrupp Ag | Kugelgewindetrieb einer elektromechanischen Servolenkung mit Umlenkkörper für eine Kugelrückführung |
| US10457313B2 (en) | 2016-06-28 | 2019-10-29 | Steering Solutions Ip Holding Corporation | ADAS wheel locking device |
| US10363958B2 (en) | 2016-07-26 | 2019-07-30 | Steering Solutions Ip Holding Corporation | Electric power steering mode determination and transitioning |
| US10160477B2 (en) | 2016-08-01 | 2018-12-25 | Steering Solutions Ip Holding Corporation | Electric power steering column assembly |
| US10189496B2 (en) | 2016-08-22 | 2019-01-29 | Steering Solutions Ip Holding Corporation | Steering assembly having a telescope drive lock assembly |
| US10384708B2 (en) | 2016-09-12 | 2019-08-20 | Steering Solutions Ip Holding Corporation | Intermediate shaft assembly for steer-by-wire steering system |
| US10160473B2 (en) | 2016-09-13 | 2018-12-25 | Steering Solutions Ip Holding Corporation | Steering column decoupling system |
| US10399591B2 (en) | 2016-10-03 | 2019-09-03 | Steering Solutions Ip Holding Corporation | Steering compensation with grip sensing |
| US10239552B2 (en) | 2016-10-14 | 2019-03-26 | Steering Solutions Ip Holding Corporation | Rotation control assembly for a steering column |
| US10481602B2 (en) | 2016-10-17 | 2019-11-19 | Steering Solutions Ip Holding Corporation | Sensor fusion for autonomous driving transition control |
| US10421475B2 (en) | 2016-11-15 | 2019-09-24 | Steering Solutions Ip Holding Corporation | Electric actuator mechanism for retractable steering column assembly with manual override |
| US10310605B2 (en) | 2016-11-15 | 2019-06-04 | Steering Solutions Ip Holding Corporation | Haptic feedback for steering system controls |
| US9862403B1 (en) | 2016-11-29 | 2018-01-09 | Steering Solutions Ip Holding Corporation | Manually retractable steering column assembly for autonomous vehicle |
| US10351160B2 (en) | 2016-11-30 | 2019-07-16 | Steering Solutions Ip Holding Corporation | Steering column assembly having a sensor assembly |
| US10780915B2 (en) | 2016-12-07 | 2020-09-22 | Steering Solutions Ip Holding Corporation | Vehicle steering system having a user experience based automated driving to manual driving transition system and method |
| DE102017201594B4 (de) * | 2017-02-01 | 2018-12-13 | Thyssenkrupp Ag | Motorisch verstellbare Lenksäule für ein Kraftfahrzeug |
| US10370022B2 (en) | 2017-02-13 | 2019-08-06 | Steering Solutions Ip Holding Corporation | Steering column assembly for autonomous vehicle |
| US10385930B2 (en) | 2017-02-21 | 2019-08-20 | Steering Solutions Ip Holding Corporation | Ball coupling assembly for steering column assembly |
| US10449927B2 (en) | 2017-04-13 | 2019-10-22 | Steering Solutions Ip Holding Corporation | Steering system having anti-theft capabilities |
| KR101943919B1 (ko) * | 2017-08-08 | 2019-01-30 | 주식회사 만도 | 전동식 동력 보조 조향장치 |
| US10875566B2 (en) | 2018-03-22 | 2020-12-29 | Steering Solutions Ip Holding Corporation | Stow release assembly for a manually adjustable steering column assembly |
| US10974756B2 (en) | 2018-07-31 | 2021-04-13 | Steering Solutions Ip Holding Corporation | Clutch device latching system and method |
| CN109621432B (zh) * | 2019-01-22 | 2023-08-11 | 南京全控航空科技有限公司 | 联动翻转装置以及具有其的多自由度平台 |
| US11009085B2 (en) * | 2019-05-17 | 2021-05-18 | Rolls-Royce Corporation | Electromagnetic clutch for gas turbine accessories |
| WO2021171149A1 (en) * | 2020-02-28 | 2021-09-02 | Bombardier Recreational Products Inc. | Rack and pinion assembly for a steering assembly |
| US11952128B2 (en) * | 2022-04-05 | 2024-04-09 | B/E Aerospace, Inc. | Aircraft seat arm O-ring friction mechanism |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6883635B2 (en) * | 2001-06-29 | 2005-04-26 | Delphi Technologies, Inc. | Ball-screw assembly isolator |
| JP2005180604A (ja) * | 2003-12-19 | 2005-07-07 | Sanden Corp | 動力伝達装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1248981A (en) * | 1968-08-30 | 1971-10-06 | Cam Gears Ltd | Improvements in or relating to rack and pinion assemblies |
| GB1590629A (en) * | 1976-09-23 | 1981-06-03 | Cam Gears Ltd | Powerassisted gear system |
| ES522273A0 (es) * | 1983-04-28 | 1984-04-16 | Bendiberica Sa | Mecanismo de direcion asistida electricamente para automoviles |
| CA1280375C (en) * | 1986-01-14 | 1991-02-19 | Yasuo Shimizu | Motor-driven power steering system for vehicles |
| US4918921A (en) * | 1987-10-22 | 1990-04-24 | Automotive Products Plc | Coaxial push rod and hollow screw ball nut drive for master cylinder |
| JP2971000B2 (ja) * | 1994-11-09 | 1999-11-02 | 株式会社ミツバ | ナット部材の中空シャフトへの圧入構造 |
| US6244125B1 (en) * | 1998-06-10 | 2001-06-12 | Koyo Seiko Co., Ltd. | Movement transforming device and power steering apparatus |
| US6422334B1 (en) * | 1999-09-17 | 2002-07-23 | Delphi Technologies, Inc. | Ball screw rack assembly |
| JP2002145080A (ja) * | 2000-11-10 | 2002-05-22 | Nsk Ltd | 電動パワーステアリング装置 |
| US7293626B2 (en) * | 2001-08-01 | 2007-11-13 | Delphi Technologies, Inc. | Apparatus and method for steering a vehicle |
| JP2007106357A (ja) * | 2005-10-17 | 2007-04-26 | Toyota Motor Corp | ステアリング装置およびその製造方法 |
| DE102008059745A1 (de) * | 2008-12-01 | 2010-06-02 | Thyssenkrupp Presta Ag | Elektromechanische Servolenkung mit Kugelgewindetrieb |
-
2009
- 2009-09-18 CN CN2009801461801A patent/CN102216144B/zh not_active Expired - Fee Related
- 2009-09-18 WO PCT/US2009/057456 patent/WO2010033788A1/en active Application Filing
- 2009-09-18 US US13/063,818 patent/US8479605B2/en active Active
- 2009-09-18 PL PL09815256T patent/PL2344372T3/pl unknown
- 2009-09-18 EP EP09815256.4A patent/EP2344372B1/en not_active Not-in-force
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6883635B2 (en) * | 2001-06-29 | 2005-04-26 | Delphi Technologies, Inc. | Ball-screw assembly isolator |
| JP2005180604A (ja) * | 2003-12-19 | 2005-07-07 | Sanden Corp | 動力伝達装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2010033788A1 (en) | 2010-03-25 |
| PL2344372T3 (pl) | 2014-07-31 |
| EP2344372A1 (en) | 2011-07-20 |
| CN102216144A (zh) | 2011-10-12 |
| US8479605B2 (en) | 2013-07-09 |
| US20110167940A1 (en) | 2011-07-14 |
| EP2344372B1 (en) | 2014-02-12 |
| EP2344372A4 (en) | 2012-08-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102216144B (zh) | 具有隔离器的将旋转运动变换成线性运动的机构 | |
| JP6585051B2 (ja) | 着陸装置駆動システムのフレキシブルインターフェース | |
| CN100519300C (zh) | 电动动力转向装置 | |
| US7766345B2 (en) | Telescopic actuator | |
| CN112443635B (zh) | 用于滚珠丝杠的分段弹簧 | |
| US9091122B2 (en) | Annular device for radial displacements of interconnected parts | |
| US7871084B2 (en) | Telescopic actuator | |
| US7766350B2 (en) | Telescopic actuator | |
| EP1970598B1 (en) | Feed screw mechanism | |
| CN106678189B (zh) | 双联减振型非定心式等角速万向联轴器 | |
| US8221250B2 (en) | Damper unit for a shaft | |
| US11346435B2 (en) | Reducer of electric power steering apparatus | |
| US11104371B2 (en) | Steering device | |
| US20080305919A1 (en) | Friction Gear Frej | |
| CN101437714A (zh) | 用于车辆的万向节装置 | |
| US20240060551A1 (en) | Linear actuator having wobble joint | |
| JPH08270826A (ja) | 制御弁 | |
| CN107269799A (zh) | 一种用于端面活齿谐波传动的齿侧间隙自适应调节装置 | |
| RU2374527C1 (ru) | Устройство для преобразования вращательного движения в поступательное (варианты) | |
| JP7495122B2 (ja) | 線状体用巻き取り巻き戻し機構 | |
| EP0855530A1 (en) | Flexible gear coupling | |
| CN209586983U (zh) | 鼓形齿联轴器及具有其的齿轮传动系统 | |
| JP2016217407A (ja) | 自在継手 | |
| JP6159708B2 (ja) | 伸縮アクチュエータ | |
| JP2016043791A (ja) | 伸縮アクチュエータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20131016 Termination date: 20170918 |