CN101978363A - 马达驱动鼠标 - Google Patents
马达驱动鼠标 Download PDFInfo
- Publication number
- CN101978363A CN101978363A CN2008801237816A CN200880123781A CN101978363A CN 101978363 A CN101978363 A CN 101978363A CN 2008801237816 A CN2008801237816 A CN 2008801237816A CN 200880123781 A CN200880123781 A CN 200880123781A CN 101978363 A CN101978363 A CN 101978363A
- Authority
- CN
- China
- Prior art keywords
- equipment
- main body
- position equipment
- mouse
- pedestal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0354—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of 2D relative movements between the device, or an operating part thereof, and a plane or surface, e.g. 2D mice, trackballs, pens or pucks
- G06F3/03543—Mice or pucks
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2203/00—Indexing scheme relating to G06F3/00 - G06F3/048
- G06F2203/033—Indexing scheme relating to G06F3/033
- G06F2203/0333—Ergonomic shaped mouse for one hand
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Position Input By Displaying (AREA)
Abstract
一种用于计算机的指位设备和使用该指位设备的方法。该指位设备包括一个基座、一个与基座相连接的移动跟踪设备、以及一个与基座可绕支点转动相连的主体。该主体围绕至少一个轴相对于基座转动。
Description
相关申请的交叉引用
本申请主张于2007年11月15日提交的申请号为60/988,176的美国临时专利申请的优先权,其内容通过引用并入本申请。
发明背景
1.发明领域
本发明与计算机输入设备相关,尤其与马达驱动鼠标相关。
2.相关技术的描述
重复性过度劳累损伤(RSI)与长时间使用鼠标或其它指位设备(pointingdevice)有关。诸如轨迹球或操纵杆的其他设备已被开发出作为鼠标的替代设备。另有其他符合人体工程学的设备诸如带有曲线的或形状的鼠标也已存在。然而,这些设备并未能消除罹患RSI的风险。此外,目前的输入设备一般都是静态的设备。
发明内容
一种用于计算机的指位设备及使用该指位设备的方法。指位设备包括一个基座、一个与基座相连接的移动跟踪设备、以及一个与基座可绕支点转动相连的主体。该主体可以围绕至少一个轴相对于基座转动。该主体被一个驱动机构驱动而绕轴转动。
附图简要说明
图1描述根据本发明实施例之一的鼠标;
图2A-2C描述根据本发明实施例之二的鼠标的侧视图;
图3A-3B描述图2中鼠标的主视图;以及
图4A-4D描述根据本发明另一实施例的鼠标。
当时优选实施方案的详细说明
这里描述指位设备的一个优选实施例为:配置成输入设备的智能鼠标(robotic mouse)。在一个实施例中,鼠标能减少RSI的发生。在一个优选实施例中,鼠标上表面的位置相对于鼠标下表面或鼠标的使用面发生改变。运动方式可为连续的、阶梯式的、周期性或类似的方式。而且,鼠标可适用于左手使用者或右手使用者。在一个实施例中,鼠标的移动是由马达带动的。在另一个实施例中,移动是响应横跨平面的移动而由齿轮驱动的。而在另一个实施例中,其运动可由自卷动弹簧驱动或摩擦驱动机构驱动或类似机构驱动。换言之,马达和非马达的运动均可使用。
需要说明的是,本发明中的鼠标是智能设备因为该鼠标是可自动控制、可再编程、多用途、在三轴或多轴上可编程的操纵装置,即可固定使用,又可在工业自动化应用中移动使用。因此,本发明中的鼠标是作为输入设备使用的智能设备。
在一个实施例中,安装有一可指示鼠标移动的指示器(未示出)。该指示器具有多种移动状态来指示该移动是否是随机的、阶梯式的、还是周期性的或其他移动状态。此外,在鼠标将要移动时,指示器能告知使用者。例如,指示器可以是LED,在鼠标移动前闪烁或亮起。在一个实施例中,多颜色的LED灯用于指示不同状态。作为另一种选择,不同的光亮图案可以指示不同状态。
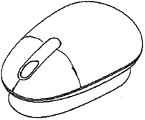
图1描述鼠标100的第一个实施例。如图所示,鼠标100包括至少三个可移动部位,即尾部10、前侧部20和前侧部30。虽然仅显示出三个不同部位,但是也可以提供其他可移动部位。例如,尾部10可沿线15分为两个部分。
鼠标100分别包括鼠标右键50和鼠标左键40。此外,还包括第三个按键、滚轮键60或类似按键。鼠标100可以安装有轨迹球(ball)、光线传感器、激光器等装置,用于探测移动。其他鼠标的配置包括更多的鼠标按键、更少的鼠标按键、更多的滚轮键、更少的滚轮键,等等。
在使用过程中,鼠标100的各个部位由驱动机构驱动,以减少罹患RSI的风险。鼠标尾部10与部位20、30的距离拉大以延长鼠标的长度。此外,尾部10能在与鼠标移动平面大致垂直的方向上移动,以此改变手和手腕的相对转动部位。
鼠标前部20和鼠标前部30能在与放置鼠标平面大致垂直的方向上移动,也可彼此相背移动从而增大彼此间的间距。在一个实施例中,按键40、50及60可移动以改变使用者手的位置。相对于鼠标主体所在平面的方向、或者相对鼠标主体所在平面升高和降低的方向,按键40和按键50可以沿着其中至少一个方向移动。
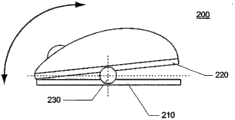
图2A-2C示出的是符合人体工程学的鼠标200的第二个实施例。在此实施例中,主体200通过支架(mount)230与基座210连接。支架230可以是万向节(universal joint)、转轴、铰链、轴、凸轮、轨道、轨道系统或类似机构。如侧视图2B所示,鼠标外壳220围绕联轴点(coupling joint)230转动,从而外壳210的前部及后部基本上都能与基座210接触。应当说明的是,在其它实施例中,可以有更多的或更少的移动。另外,外壳220可以包括鼠标右键、鼠标左键以及滚轮键等类似装置。而且,鼠标220还能利用轨迹球、光线传感器、LED灯或类似装置对移动进行跟踪。其它的鼠标配置包括更多或更少的鼠标按键、更多或更少的滚轮键等类似装置。图2A-2C所示的绕轴转动是利用驱动机构进行的。驱动机构连接至鼠标基座、鼠标主体,并优选还与按键连接。驱动机构优选采用电动马达和齿轮传动链(gear train)。
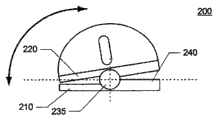
图3A和3B示出的是适用右手使用者的图2中的鼠标。所示元件进行镜像后即可适合左手使用者。如图所示,外壳220通过联轴点235连接至基座210。联轴点235可与联轴点230相同。在另一个实施例中,使用了多个分离的(separated)联轴点。联轴点235可以是铰链、轴、万向节、球接头、凸轮、轨道、轨道系统或类似机构。图3A-3B所示的转动是利用驱动机构进行的。驱动机构连接至鼠标基座、鼠标主体,并且优选地还与按键连接。驱动机构优选采用电动马达及齿轮传动链。
如图所示,止动器240防止鼠标转动时超过某特定点。止动器240可以使使用者手部位于初始放松状态(initial rest position)。需要说明的是,还可采用其它机械止动器或其它移动限制技术。在该初始点上转动鼠标可减少罹患RSI的风险。需要说明的是,止动器240优选地可调节。此外,第一个实施例可与图2和图3所描述的实施例结合。
需要说明的是,鼠标200优选地配置为既能两侧绕轴转动,又能前后绕轴转动。此外,也可进行圆周旋转。在另一个实施例中,指位装置为轨迹球。在该实例中,基座被配置为可以移动,从而使用者的手部改变方向而以使用鼠标200相似的方式使用轨迹球。
图4A-4D示出指位设备的另一个实施例。如图所示,鼠标具有一个单独的绕轴支点(pivot point),鼠标靠该绕轴支点改变它与基座的相对位置。如同其它实施例中一样,一个或多个马达、或一个或多个齿轮传动链用来驱动鼠标主体。齿轮传动链由直齿轮、直切或螺旋锥齿轮、蜗轮、行星齿轮,准双曲面齿轮、螺旋齿轮、人字形齿轮等中的一个或多个组成。在一个实施例中,由电磁铁移动鼠标主体位置。
控制软件优选地包括但不限于用于缓解或防止罹患特定疾病的程序,如腕遂道或其它由于重复性运动导致的疾病。鼠标主体和控制按键的平缓运动能消除来自相同角度的重复性动作,因此可以改善血液流动,改变正中神经(median nerve)的位置,放松过度劳累的肌肉。控制软件优选地可存储使用者信息从而每位使用者具有指定的移动配置信息。
软件程序优选地对特定按键的重复性动作进行监视,并对鼠标组件进行相应调整。如果使用者不断地集中使一个按键移动,程序会优选地调整相应部位,使该部位更频繁地移动或变换成其它角度。
软件可存储在鼠标内部、与鼠标相连的电脑或网络、网络上的第三方电脑或服务器、专用硬件控制器或外部资源:如识别卡、USB存储卡、固态储存器或其它存储装置等中。
在一个实施例中,软件的个性化信息通过使用预编程序,设置存储在电脑、服务器上的信息,或由使用者输入来改变。当使用者登录到电脑或网络上时,配置的改变可以自动生成。自动配置也能在生物辨识系统、使用者识别卡或身份卡帮助下实现。一旦确定使用者身份,不论存储在何处,软件都能为此特定使用者对鼠标进行调整。
在一个实施例中,使用者能将鼠标或指位设备设定到优选位置。指位设备保持此位置不发生变化,或可选择地,将使用者预设置作为自动运动的开始点。
在另一个实施例中,除已经提到的改进外,还可为手部及腕部提供静止温度的变化,以缓解常见的手部及手臂疼痛。为此,鼠标可加热以温暖使用者手部。
图1、图2、图3及图4中所示的鼠标都为马达驱动鼠标。马达驱动齿轮传动链,齿轮传动链能被配置为驱动鼠标的不同部位。例如,第一个齿轮传动链使鼠标两侧移动,而第二组齿轮使鼠标前后移动。可选择地,可由单一齿轮传动链使鼠标所有部位进行移动。在一个实施例中,鼠标通过USB端口供电。在一个可选的实施例中,鼠标由电池供电、太阳能供电或类似方式供电。鼠标既可有线,也可无线。在另一个实施例中,平坦曲面上鼠标的运动为鼠标供电。此外,鼠标可采用任何已知方法或装置确定指位运动,如轨迹球、光线传感器等类似装置。
鼠标优选地采用微处理器控制。该控制可通过PC或板载微处理器进行。在一个实施例中,使用者电脑上运行的计算机程序控制鼠标运动。在另一个实施例中,程序存储在鼠标板载的固件中。而在另外一个实施例中,程序存储于可更新的闪存或其它存储器中。控制也可通过无线技术从键盘或计算机进行传输。在另外一个实施例中,鼠标的控制由局域网或因特网上的服务器进行。
鼠标的运动可以根据数种方式中的一种来进行控制。鼠标可以基于时间、使用量、移动距离、温度、热量、脉搏、重量或随机运动来改变其位置。也可以用固定节奏模式来控制鼠标各个部分的移动。移动也可以基于正在使用的或预期使用的鼠标移动程序。例如,鼠标可以被提示由于某一经常出现左右移动的程序在发生,因此该运动方式可能会频繁出现,或提示鼠标以不同的模式移动。
在一个实施例中,移动并非连续进行。换言之,鼠标会在不同位置间停顿。鼠标在任何给定位置停留的时间长短至少部分由上述因素确定。
在一个实施例中,鼠标上安装有显示窗口(图中未显示)。在一个实施例中,显示窗口为LCD显示屏。显示屏上显示的项目可包括特定使用者、速度设置、移动类型等此类信息。在一个实施例中,显示屏提示使用者即将要进行的移动。
在本发明的一个实施例中,使用者被提示运行部分根据其活动状态制定的练习程序。程序会提示使用者完成一些任务,以减少罹患RSC的风险。
作为智能计算机接口(robotic computer interface),本发明中的鼠标在三轴或多轴上可编程。此外,本发明中的鼠标通过程序自动控制。而且,可对鼠标进行再次编程。在一个实施例中,智能鼠标装有能够在使用中学习的自适应程序。
虽然对本发明的描述是通过参照一个优选实施例进行的,但应该认识到:在以上描述的创造性概念的精神与范围内可进行众多变动。因此,本发明不应只局限于已公开的实施例,还应包括以下全部权利要求语言容许的范围。
Claims (20)
1.一种指位设备,包括:
基座;
与基座连接的运动跟踪设备;
与基座连接并绕轴转动的主体;以及
与基座及主体连接的驱动机构,其中所述驱动机构用于使所述主体相对于所述基座在至少一个轴上转动。
2.根据权利要求1所述的指位设备,还包括至少一个按键,其中所述驱动机构使所述按键至少相对于主体或基座之一变动其位置。
3.根据权利要求1所述的指位设备,其中,所述驱动机构使所述主体至少在两个轴上转动。
4.根据权利要求3所述的指位设备,其中所述主体还包括至少两个位于主体第一端和第二端的两个按键,所述两个按键适用于使用者手掌使用。
5.根据权利要求4所述的指位设备,其中,所述驱动机构延伸第一端和第二端之间的外壳的长度。
6.根据权利要求4所述的指位设备,其中所述驱动机构可改变所述两个按键之间的距离。
7.根据权利要求3所述的指位设备,其中当预定条件满足时,所述驱动机构使所述主体转动。
8.根据权利要求4所述的指位设备,其中所述主体的各位部分可独立移动。
9.根据权利要求4所述的指位设备,其中所述主体的各位部分以同步方式进行移动。
10.根据权利要求7所述的指位设备,其中所述预定条件根据希望的移动方式来定制。
11.根据权利要求3所述的指位设备,还包括一个控制器,所述控制器用于监测包括至少一个按键按压力、时间及移动方式的参数,所述控制器根据所述参数激活所述驱动机构。
12.根据权利要求11所述的指位设备,其中所述控制器整合在所述指位设备内。
13.根据权利要求11所述的指位设备,其中所述控制器是与所述指位设备相连接的设备的一部分。
14.根据权利要求13所述的指位设备,其中与所述指位设备相连接的设备为电脑。
15.根据权利要求3所述的指位设备,其中所述指位设备为鼠标。
16.根据权利要求3所述的指位设备,其中所述指位设备为轨迹球。
17.根据权利要求3所述的指位设备,还包括在外壳上的指示器,所述指示器用于指示所述指位设备的所述主体相对于所述基座的移动状态。
18.根据权利要求3所述的指位设备,还包括限制所述主体相对于所述基座的左右转动的止动器。
19.根据权利要求3所述的指位设备,其中所述驱动机构为马达。
20.使用一种指位设备的方法,所述指位设备包括一个基座、一个连接至所述基座并围绕所述基座转动的主体,以及一个用于驱动主体在至少一个轴上转动的驱动机构,所述方法包括:
将所述指位设备与电脑连接;
对包括按键按压力、时间及位置在内的参数中的至少一个进行监测;
根据所述参数激活所述驱动机构,所述驱动机构改变主体上至少一部分相对于所述基座的位置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US98817607P | 2007-11-15 | 2007-11-15 | |
| US60/988,176 | 2007-11-15 | ||
| PCT/US2008/012850 WO2009064498A1 (en) | 2007-11-15 | 2008-11-17 | Motorized mouse |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN101978363A true CN101978363A (zh) | 2011-02-16 |
Family
ID=40639044
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2008801237816A Pending CN101978363A (zh) | 2007-11-15 | 2008-11-17 | 马达驱动鼠标 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20100253627A1 (zh) |
| EP (1) | EP2223223A4 (zh) |
| JP (1) | JP2011503744A (zh) |
| CN (1) | CN101978363A (zh) |
| WO (1) | WO2009064498A1 (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108472542A (zh) * | 2015-11-27 | 2018-08-31 | 铁堡发明有限公司 | 游戏控制器及为此的触发器 |
| TWI691869B (zh) * | 2018-12-07 | 2020-04-21 | 致伸科技股份有限公司 | 滑鼠滾輪裝置 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101366345B1 (ko) * | 2012-12-26 | 2014-02-25 | 광주대학교산학협력단 | 자동 그립각 조절 기능을 갖는 컴퓨터용 마우스 |
| JP5841083B2 (ja) * | 2013-02-03 | 2016-01-06 | 泰章 岩井 | ポインティングデバイス |
| WO2015053775A1 (en) | 2013-10-10 | 2015-04-16 | Empire Technology Development Llc | Shape changing device |
| US9715286B2 (en) | 2014-01-28 | 2017-07-25 | Solid Art Labs, Inc. | Hand-controllable signal-generating devices and systems |
| ES2949442T3 (es) * | 2014-12-02 | 2023-09-28 | Contour Innovations Llc | Ratón ajustable |
| US10365730B2 (en) * | 2017-06-09 | 2019-07-30 | Logitech Europe S.A. | Input device with track ball |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5355147A (en) * | 1993-10-04 | 1994-10-11 | Donald Lear | Ergonomic computer mouse |
| US5623582A (en) * | 1994-07-14 | 1997-04-22 | Immersion Human Interface Corporation | Computer interface or control input device for laparoscopic surgical instrument and other elongated mechanical objects |
| JPH0950345A (ja) * | 1995-08-07 | 1997-02-18 | Alps Electric Co Ltd | Xy座標入力装置 |
| JPH0966476A (ja) * | 1995-08-29 | 1997-03-11 | Hitachi Ltd | 感触再現装置及びこれを用いたマニピュレータシステム |
| US6100874A (en) * | 1995-11-17 | 2000-08-08 | Immersion Corporation | Force feedback mouse interface |
| US6489947B2 (en) * | 1997-08-15 | 2002-12-03 | Ergodevices Corp. | Ergonomic dual-section computer-pointing device |
| JPH1195916A (ja) * | 1997-09-22 | 1999-04-09 | Hitachi Ltd | 座標入力装置 |
| JP3204301B2 (ja) * | 1997-10-14 | 2001-09-04 | 日本電気株式会社 | ポインティングデバイスとコンピュータ間の制御方法 |
| US6064371A (en) * | 1998-02-06 | 2000-05-16 | International Business Machines Corporation | PC mouse incorporating adjustability |
| US6256018B1 (en) * | 1998-03-18 | 2001-07-03 | Micron Electronics, Inc. | Computer keyboard assembly |
| US6717573B1 (en) * | 1998-06-23 | 2004-04-06 | Immersion Corporation | Low-cost haptic mouse implementations |
| JP2001005604A (ja) * | 1999-06-17 | 2001-01-12 | Zaza International:Kk | マウス |
| DE10146473A1 (de) * | 2001-09-21 | 2003-04-17 | 3Dconnexion Gmbh | Kombinierter Positions-/Kraftmomentensensor |
| JP2003228459A (ja) * | 2001-11-30 | 2003-08-15 | Fujitsu Component Ltd | 入力装置 |
| US7233318B1 (en) * | 2002-03-13 | 2007-06-19 | Apple Inc. | Multi-button mouse |
| FR2854966B1 (fr) * | 2003-05-09 | 2005-12-30 | Wany Robotics | Systeme de pointage sans fil a recharge electrique automatique pour ordinateur |
| US7443382B2 (en) * | 2004-08-27 | 2008-10-28 | Microsoft Corporation | Scroll wheel carriage |
| JP2006114001A (ja) * | 2004-09-16 | 2006-04-27 | Kddi Corp | 入出力デバイス及び奥行き感知システム |
| JP2006259896A (ja) * | 2005-03-15 | 2006-09-28 | Alps Electric Co Ltd | 力覚付与型入力装置 |
| KR100686563B1 (ko) * | 2005-06-30 | 2007-02-26 | 엘지전자 주식회사 | 플래쉬 메모리가 포함된 무선 마우스 시스템 |
| US20080024442A1 (en) * | 2006-07-31 | 2008-01-31 | Areson Technology Corp. | Wireless cursor indicating device |
| TW200825857A (en) * | 2006-12-04 | 2008-06-16 | Kye Systems Corp | Computer input device allowing outline adjustment |
-
2008
- 2008-11-17 WO PCT/US2008/012850 patent/WO2009064498A1/en active Application Filing
- 2008-11-17 US US12/743,352 patent/US20100253627A1/en not_active Abandoned
- 2008-11-17 EP EP08849314.3A patent/EP2223223A4/en not_active Withdrawn
- 2008-11-17 CN CN2008801237816A patent/CN101978363A/zh active Pending
- 2008-11-17 JP JP2010534051A patent/JP2011503744A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108472542A (zh) * | 2015-11-27 | 2018-08-31 | 铁堡发明有限公司 | 游戏控制器及为此的触发器 |
| TWI691869B (zh) * | 2018-12-07 | 2020-04-21 | 致伸科技股份有限公司 | 滑鼠滾輪裝置 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2009064498A9 (en) | 2010-07-01 |
| WO2009064498A1 (en) | 2009-05-22 |
| EP2223223A1 (en) | 2010-09-01 |
| JP2011503744A (ja) | 2011-01-27 |
| EP2223223A4 (en) | 2013-05-22 |
| US20100253627A1 (en) | 2010-10-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101978363A (zh) | 马达驱动鼠标 | |
| CN102913723B (zh) | 一种对颈椎有保护作用的显示器运动支架 | |
| KR20190128133A (ko) | 재활 훈련 장치 | |
| CN103345285B (zh) | 一种四足机器人遥控方法 | |
| CN102369500A (zh) | 鼠标 | |
| CN103158162A (zh) | 外构架式双向力反馈数据手套 | |
| EP2709802A2 (en) | Haptic device for manipulator and vehicle control | |
| CN102419632A (zh) | 可调节的视线跟踪人机交互装置 | |
| CN101298897B (zh) | 颈部保健电脑显示器支架 | |
| EP1629949B1 (en) | Haptic interface device | |
| US20150049292A1 (en) | Adjustable Optical Device | |
| CN101403462B (zh) | 一种显示设备托架装置 | |
| CN210500286U (zh) | 一种单球平衡移动机器人 | |
| CN209458599U (zh) | 显示器智能支架 | |
| CN201326878Y (zh) | 一种显示设备托架 | |
| KR101972807B1 (ko) | 표시장치를 이용한 손가락 및 손목 능동 재활 훈련 시스템 | |
| CN111730622A (zh) | 特种设备受限空间检测机器人 | |
| Matsumaru et al. | Mobile robot with preliminary-announcement function of forthcoming motion using light-ray | |
| CN111564105B (zh) | 一种基于反射式显示技术的图像显示方法 | |
| CN109693747B (zh) | 一种摆动式平衡机器人以及平衡机器人控制方法 | |
| CN212031854U (zh) | 一种平面反射式图像显示装置 | |
| CN213034634U (zh) | 特种设备受限空间检测机器人 | |
| CN212590949U (zh) | 一种计算机软件开发用操作台 | |
| KR101792566B1 (ko) | 병렬 링크 구조체 및 이를 구비한 역감 제시 인터페이스 시스템 | |
| CN219285694U (zh) | 一种三维动作鼠标 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20110216 |