CN101797167B - 超声波诊断装置以及超声波诊断方法 - Google Patents
超声波诊断装置以及超声波诊断方法 Download PDFInfo
- Publication number
- CN101797167B CN101797167B CN2010101041104A CN201010104110A CN101797167B CN 101797167 B CN101797167 B CN 101797167B CN 2010101041104 A CN2010101041104 A CN 2010101041104A CN 201010104110 A CN201010104110 A CN 201010104110A CN 101797167 B CN101797167 B CN 101797167B
- Authority
- CN
- China
- Prior art keywords
- mentioned
- image
- acceptance
- condition
- send
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0833—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0833—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures
- A61B8/0841—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures for locating instruments
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52053—Display arrangements
- G01S7/52057—Cathode ray tube displays
- G01S7/52074—Composite displays, e.g. split-screen displays; Combination of multiple images or of images and alphanumeric tabular information
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52085—Details related to the ultrasound signal acquisition, e.g. scan sequences
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
- A61B2017/3413—Needle locating or guiding means guided by ultrasound
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/895—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques characterised by the transmitted frequency spectrum
- G01S15/8952—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques characterised by the transmitted frequency spectrum using discrete, multiple frequencies
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52023—Details of receivers
- G01S7/52036—Details of receivers using analysis of echo signal for target characterisation
- G01S7/52038—Details of receivers using analysis of echo signal for target characterisation involving non-linear properties of the propagation medium or of the reflective target
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Surgery (AREA)
- Physics & Mathematics (AREA)
- Medical Informatics (AREA)
- General Health & Medical Sciences (AREA)
- Pathology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Veterinary Medicine (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Radiology & Medical Imaging (AREA)
- Biophysics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
超声波诊断装置控制超声波探头,针对扫描区域内的光栅的每一个依次进行基于第一发送接收条件的超声波的发送接收、基于与上述第一发送接收条件不同的第二发送接收条件的超声波的发送接收、及基于与上述第一发送接收条件以及上述第二发送接收条件不同的第三发送接收条件的超声波的发送接收。超声波诊断装置具有:分别生成基于上述第一发送接收条件的回波信号的第一图像、基于上述第二发送接收条件的回波信号的第二图像、以及基于上述第三发送接收条件的回波信号的第三图像的单元;对上述第一图像以及上述第二图像实施差分处理而生成差分图像的单元;以及根据上述差分图像以及上述第三图像,执行重叠处理而生成重叠图像的单元。
Description
技术领域
本发明涉及可以进行二维扫描以及实时三维扫描的技术,特别涉及为了使操作者可以简便地视觉辨认穿刺针的针尖部分的位置而对针尖部分进行强调显示的超声波诊断装置以及超声波诊断方法。
背景技术
超声波诊断装置是通过超声波脉冲反射法,从体表无侵袭地得到生物体内的软组织的断层像的医用诊断装置。超声波诊断装置与其他医用诊断装置相比,具有小型且廉价、没有X射线等的辐射而安全性高、可以进行血流成像等特长,广泛利用于心脏、腹部、泌尿器以及妇产科等中。
另外,超声波诊断装置不仅用于图像诊断,而且例如作为肝细胞癌的局部治疗法,还用于射频烧灼疗法(RFA)、检查肝细胞组织的活体检查等中。在这些治疗/检查中,使用穿刺针,必须对肿瘤等关心部位准确地进行穿刺。因此,为了明确地掌握穿刺针侵入至生物体内的哪个位置,利用可以实时地监视关心区域以及穿刺针的超声波诊断装置。特别,近年来,随着计算机的高速化,还有在显示中利用实时三维超声波图像的情况。提出了几个在该情况下,在穿刺治疗中在三维数据上显示穿刺针位置、或者对穿刺针的方向进行标记显示的方法(例如日本特开平6-205776号公报)。轻便且可以简便地进行实时的观察的超声波诊断装置经常用于活体检查、癌的局部烧灼治疗时的穿刺针的针尖部分与病变位置的监视。
另外,近年来可以实时地进行体扫描的超声波诊断装置出现,可获知在以往困难的超声波探头的切片方向的针位置信息,活体检查、烧灼治疗的精度提高的期望高。
但是,在以往的超声波诊断装置中,被影像化的穿刺针的针尖部分淹没在背景图像中等,有时视觉辨认性不好,对操作者带来负担。另外,由于不知道穿刺针的针尖部分的准确位置,所以存在如果采集了与计划的组织的位置不同的位置处的组织、或者在不同的位置处进行了烧灼治疗,则无法得到充分的效果这样的危险性。
另外,在利用可以实时地进行体扫描的超声波诊断装置的情况下,穿刺针的针尖部分的视觉辨认性不充分,存在无法得到所期待的效果这样的问题。
进而,进行了用于提高穿刺针的针尖部分的视觉辨认性的各种研究,例如有使用边缘强调等图像处理滤波的方法等。但是,难以仅分离针尖部分,针尖部分以外的实质部分受到影响等,没有达到实用。
发明内容
本发明是考虑这样的情况而完成的,其目的在于提供一种超声波诊断装置以及超声波诊断方法,在穿刺针的监视中,操作者可以简便地视觉辨认穿刺针的针尖部分的位置。
为了解决上述课题,本发明的超声波诊断装置,具有:
超声波探头,对二维或三维的扫描区域发送超声波,接收基于上述超声波的回波作为接收信号;
控制单元,为了控制上述超声波探头,针对上述扫描区域内的光栅的每一个,依次进行基于第一发送接收条件的上述超声波的发送接收控制、基于与上述第一发送接收条件不同的第二发送接收条件的上述超声波的发送接收控制、以及基于与上述第一发送接收条件以及上述第二发送接收条件不同的第三发送接收条件的上述超声波的发送接收控制;
基本图像生成单元,分别生成基于由上述第一发送接收条件得到的上述接收信号的第一图像、基于由上述第二发送接收条件得到的上述接收信号的第二图像、以及基于由上述第三发送接收条件得到的上述接收信号的第三图像;
差分图像生成单元,对上述第一图像以及上述第二图像实施差分处理而生成差分图像;以及
重叠图像生成单元,根据上述差分图像以及上述第三图像,执行重叠处理而生成重叠图像。
另外,为了解决上述课题,本发明的超声波诊断装置,具有:
超声波探头,对二维或三维的扫描区域发送超声波,接收基于上述超声波的回波作为接收信号;
控制单元,为了控制上述超声波探头,针对上述扫描区域内的光栅的每一个,依次进行基于第一发送接收条件的上述超声波的发送接收控制、以及基于与上述第一发送接收条件不同的第三发送接收条件的上述超声波的发送接收控制;
基本图像生成单元,分别生成基于由上述第一发送接收条件得到的上述接收信号的第一图像、以及基于由上述第三发送接收条件得到的上述接收信号的第三图像;以及
重叠图像生成单元,根据上述第一图像以及上述第三图像,执行重叠处理而生成重叠图像。
为了解决上述课题,本发明的超声波诊断方法,具有:
控制步骤,为了控制对二维或三维的扫描区域发送超声波、接收基于上述超声波的回波作为接收信号的超声波探头,针对上述扫描区域内的光栅的每一个,依次进行基于第一发送接收条件的上述超声波的发送接收控制、基于与上述第一发送接收条件不同的第二发送接收条件的上述超声波的发送接收控制、以及基于与上述第一发送接收条件以及上述第二发送接收条件不同的第三发送接收条件的上述超声波的发送接收控制;
基本图像生成步骤,分别生成基于由上述第一发送接收条件得到的上述接收信号的第一图像、基于由上述第二发送接收条件得到的上述接收信号的第二图像、以及基于由上述第三发送接收条件得到的上述接收信号的第三图像;
差分图像生成步骤,对上述第一图像以及上述第二图像实施差分处理而生成差分图像;以及
根据上述差分图像以及上述第三图像,执行重叠处理而生成重叠图像的步骤。
另外,为了解决上述课题,本发明的超声波诊断方法,具有:
控制步骤,为了控制对包括用于刺入被检体的穿刺针的针尖部分的二维或三维的扫描区域发送超声波、接收基于上述超声波的回波作为接收信号的超声波探头,进行基于来自上述穿刺针的针尖部分的反射信号相对上述针尖部分以外的实质部分比较强的第一发送接收条件的上述超声波的发送接收控制、和基于与上述第一发送接收条件不同的第三发送接收条件的上述超声波的发送接收控制;
生成基于由上述第一发送接收条件得到的上述接收信号的第一图像、以及基于由上述第三发送接收条件得到的上述接收信号的第三图像的步骤;以及
根据上述第一图像以及上述第三图像,执行重叠处理而生成重叠图像的步骤。
附图说明
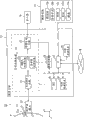
图1是示出本实施方式的超声波诊断装置的结构的概略图。
图2是示出本实施方式的超声波诊断装置的功能的框图。
图3是示出扫描次序的一个例子的图。
图4是示出图像生成电路通过由图像生成控制部进行的控制而生成的图像的一个例子的图。
图5是示出描绘出两点(穿刺针的针尖部分-实质部分)的肝脏的图像的一个例子的图。
图6是示出针尖部分与实质部分的RF信号的频谱的一个例子的图。
图7是图像生成电路通过由图像生成控制部进行的控制而生成的图像的一个例子的图。
图8是示出差分图像的一个例子的图。
图9是示出重叠图像的一个例子的图。
图10是示出包括差分图像内的穿刺引导线的限定区域的图。
图11是示出基于差分体数据内的第一坐标以及第二坐标的本实施方式的穿刺线的图。
图12A、图12B、以及图12C是示出进行三维扫描时的以往的穿刺引导线的显示例的图。
图13A、图13B、以及图13C是示出进行三维扫描时的本实施方式的穿刺线的显示例的图。
图14是用于说明接收信号的基波分量以及谐波分量的图。
图15是用于说明基于两个系统的接收信号的加法信号的图。
具体实施方式
参照附图,说明本发明的超声波诊断装置以及超声波诊断方法的实施方式。
图1是示出本实施方式的超声波诊断装置的结构的概略图。
图1示出本实施方式的超声波诊断装置10。该超声波诊断装置10大致由穿刺接头(adapter)11、超声波探头12、装置主体13、显示器14以及操作面板15构成。
穿刺接头11例如以规定的角度固定在超声波探头12上。在穿刺接头11上,安装有向从被检体(患者)P的体表面到体内的穿刺对象(肿瘤)的区域刺入的穿刺针(针)11a。
超声波探头12具有压电振子群,该压电振子群根据来自装置主体13的驱动脉冲对包括患者P的穿刺对象的二维或三维的扫描区域发送超声波脉冲,并且接收与发送的超声波脉冲对应的回波并变换为电信号。在超声波脉冲从超声波探头12的压电振子群发送到扫描区域时,由该超声波脉冲形成的超声波波束在体内组织的声阻的不连续面上依次反射。通过压电振子群接收该被反射的回波。通过压电振子群将接收到的回波变换为回波信号。回波信号的振幅依赖于进行反射的不连续面中的声阻之差。另外,在移动的血流或心脏壁等的表面反射的情况下,由于多普勒效应,与发送的超声波脉冲对应的回波依赖移动体的超声波发送方向的速度分量,受到频率偏移。
作为超声波探头12,例如,可以举出机械式三维探头以及2D探头(矩阵阵列探头)等。机械式三维探头是可以使仅在X轴方向(方位角(azimuth)方向)上排列成多个(例如100或200个)的压电振子群机械地煽动的探头,或者是可以使在X轴方向上排列成多个并在Y轴方向(仰角(elevation)方向)上排列成少数(例如三个)的压电振子群机械地煽动的探头。另外,2D探头是在X轴方向以及Y轴方向这两方向上排列了多个压电振子的探头。
在超声波探头12是机械式三维探头的情况下,为了将超声波脉冲在X轴方向上聚束而形成在Z轴方向(深度方向)上延伸的适当的超声波波束,通过在X轴方向上排列成多个的压电振子电子地进行聚焦。另一方面,在超声波探头12是机械式三维探头的情况下,为了将超声波脉冲在Y轴方向上聚束而形成在Z轴方向上延伸的适当的超声波波束,优选在Y轴方向上在一个压电振子的超声波照射侧具备声透镜、或者将压电振子做成凹面振子。另外,在超声波探头12是机械式三维探头的情况下,为了将超声波脉冲在Y轴方向上聚束而形成在Z轴方向上延伸的适当的超声波波束,在Y轴方向上在少数压电振子的超声波照射侧具备声透镜、或者根据焦点的Z轴方向的位置在Y轴方向上改变少数压电振子的驱动个数。在使用机械式三维探头来扫描三维区域的情况下,一边使压电振子群煽动,一边利用由超声波脉冲形成的超声波波束来扫描多个2D剖面(X-Z剖面)。
在超声波探头12是2D探头的情况下,为了将超声波脉冲在X轴方向以及Y轴方向上聚束而形成在Z轴方向上延伸的适当的超声波波束,通过在X轴方向以及Y轴方向上排列成多个的压电振子电子地进行聚焦。在使用2D探头来扫描三维区域的情况下,一边电子地使超声波脉冲的发送面在Y轴方向上偏移,一边利用由超声波脉冲形成的超声波波束来扫描多个X-Z剖面。
装置主体13具备发送接收电路21、信号处理电路22、图像生成电路23、图像存储器24、CPU(central processing unit,中央处理单元)25、内部存储装置26、IF(interface,接口)27以及外部存储装置28。另外,在本实施方式中,以发送接收电路21、信号处理电路22、以及图像生成电路23构成为集成电路来进行了说明,但也可以通过执行以软件方式模块化的软件程序来使它们的全部或一部分发挥功能。
发送接收电路21设置有未图示的发送电路以及接收电路。发送电路具有未图示的脉冲发生器电路、发送延迟电路以及触发发生电路等。脉冲发生器电路按照规定的速率频率fr Hz(周期:1/fr秒)反复发生用于形成发送超声波的速率脉冲。另外,发送延迟电路针对每个通道将超声波聚束成波束状,并且,对各速率脉冲提供为了决定发送指向性而所需的延迟时间。触发发生电路按照基于速率脉冲的定时,向超声波探头12的压电振子施加驱动脉冲。
另外,发送接收电路21的发送电路具有如下功能:可以按照CPU25的指示,瞬时变更发送频率、发送驱动电压(声压)、发送脉冲速率、扫描区域以及闪烁(flash)次数等。特别是,对于声压的变更,通过可以瞬间切换其值的线性放大器型的发送部或以电方式切换多个电源部的机构来实现。
发送接收电路21的接收电路具有未图示的放大器、接收延迟电路、A/D(analog to digital,模拟数字)转换电路以及加法电路等。在放大器中,针对每个通道对经由超声波探头12取入的回波信号进行放大。接收延迟电路对由放大器放大后的回波信号提供为了决定接收指向性而所需的延迟时间。A/D转换电路将从接收延迟电路输出的回波信号转换为数字信号。加法电路对数字的回波信号进行加法处理。通过加法电路进行的加法,来自与回波信号的接收指向性对应的方向的反射分量得到强调,根据接收指向性与发送指向性,形成超声波发送接收的综合波束,生成RF(radio frequency,射频)信号。
信号处理电路22具备B模式处理电路22a以及多普勒处理电路22b。B模式处理电路22a对从发送接收电路21中获取的RF信号,实施对数放大以及包络线检波处理等,生成以亮度的明亮度表现了信号强度的B模式图像。在该情况下,通过改变检波频率,可以改变所影像化的频带。另外,对于一个接收数据,还可以在两个检波频率下并行地进行检波处理。
多普勒处理电路22b根据从发送接收电路21中获取的RF信号对速度信息进行频率解析,抽出基于多普勒效应的血流或组织、造影剂回波分量,并针对多点求出平均速度、分散以及能量等血流信息。多普勒处理电路22b生成作为血流信息的平均速度图像、分散图像、能量图像以及将它们组合的多普勒图像。
图像生成电路23将从信号处理电路22输出的超声波扫描的扫描线信号串的剖面图像,变换为以电视等为代表的一般的视频格式的扫描线信号串的剖面图像。图像生成电路23搭载有保存图像的存储器(未图示),例如在诊断后操作者(用户)可以调出在检查中记录的图像。另外,图像生成电路23根据剖面图像形成体数据。
图像存储器24是存储从信号处理电路22以及图像生成电路23输出的图像的存储装置。在图像存储器24中,并列地保存有以不同的发送接收条件得到的图像。在图像存储器24中,存储有:从信号处理电路22输出的被称为所谓RAW数据(原始数据)的变换前的数据形式的剖面图像、从图像生成电路23输出的视频格式变换后的数据形式的剖面图像、以及从图像生成电路23输出的基于视频格式变换后的数据形式的剖面图像的体数据。
CPU25是具有如下集成电路(LSI)结构的控制装置,该集成电路是在具有多个端子的封装内封入了由半导体构成的电子电路而成的。CPU25具有执行存储在内部存储装置26中的程序的功能。另外,CPU25具有如下功能:将存储在外部存储装置28中的程序、从网络N传送并通过IF27接收而安装到外部存储装置28中的程序加载到内部存储装置26并执行。
内部存储装置26是具有兼具ROM(read only memory,只读存储器)以及RAM(random access memory,随机访问存储器)等要素的构成的存储装置。内部存储装置26具有如下功能:存储IPL(initial program loading,初始程序调入)、BIOS(basic input/outputsystem,基本输入/输出系统)以及数据、或者用于CPU25的工作存储器或数据的临时存储。
IF27由与并行连接规格或串行连接规格匹配的连接器构成。IF27是与操作面板15、医院核心的LAN(local area network,局域网)等网络N、外部存储装置28以及操作面板15等相关的接口。可以通过IF27,经由网络N向其他装置传送由装置主体13生成的图像。
外部存储装置28是具有如下结构的存储装置:在读取装置(未图示)中不可拆卸地内置有涂敷或蒸镀了磁性体的金属的盘。外部存储装置28具有如下功能:存储安装于装置主体13的程序(除了应用程序以外,还包括OS(operating system,操作系统)等)。另外,在OS中,还可以提供在针对操作者的信息显示中多使用图形,可以通过操作面板15进行基础性操作的GUI(graphical user interface,图形用户接口)。
内部存储装置26或外部存储装置28保存有超声波诊断程序等控制程序、诊断信息(患者ID(identification,标识)以及医生的意见等)、诊断记录、发送接收条件以及其他数据群。进而,还可以经由IF27向网络N网传送存储在内部存储装置26或外部存储装置28中的数据。
显示器14由液晶显示器或CRT(cathode ray tube,阴极射线管)等构成。显示器14具有根据来自图像生成电路23的视频信号,与各种参数的文字信息或标度等一起显示二维数据或三维数据的功能。
操作面板15由轨迹球15a、各种开关15b、按钮15c、鼠标15d以及键盘15e等构成。操作面板15与装置主体13连接,具有向装置主体13输入来自操作者的各种指示、例如关心区域(ROI:region ofinterest)的设定指示、以及画质条件设定指示等的功能。操作者可以经由操作面板15,向装置主体13输入从超声波探头12发送的超声波脉冲的发送频率、发送驱动电压(声压)、发送脉冲速率、扫描区域、穿刺模式开始及造影剂破坏(闪烁)指示、或接收条件等。
图2是示出本实施方式的超声波诊断装置10的功能的框图。
通过图1所示的CPU25执行程序,超声波诊断装置10作为图像生成控制部31、差分图像生成部32以及重叠图像生成部33发挥功能。另外,差分图像生成部32并不是超声波诊断装置10中必需的结构要素。另外,在本实施方式中,设为各部31至33通过执行以软件方式模块化的软件程序来发挥功能而进行了说明,但也可以通过集成电路等硬件来构成它们的全部或一部分。
图像生成控制部31具有如下功能,即控制发送接收电路21,针对各光栅(raster)(扫描线)依次进行:基于来自穿刺针11a的针尖部分的反射信号相对针尖部分以外的实质部分比较强的第一发送接收条件的超声波发生接收;基于来自穿刺针11a的针尖部分的反射信号相对实质部分比较弱的第二发送接收条件的超声波发生接收;和基于与第一发送接收条件以及第二发送接收条件不同的第三发送接收条件的超声波发送接收。图像生成控制部31例如使得进行基于低频的第一发送接收条件的超声波发送接收、和基于高频的第二发送接收条件的超声波发送接收。
图像生成控制部31通过使构成发送接收条件的发送条件以及接收条件中的至少一个不同,由此设定第一发送接收条件、第二发送接收条件、以及第三发送接收条件。在发送条件中,例如可以举出频率(基频)、发送脉冲波形、发送脉冲相位、发送频率、发送脉冲串(burst)波数、发送驱动元件数(发送开口)以及发送聚焦(focus)(发送延迟)等。作为接收条件,例如可以举出接收频率、接收脉冲串波数、接收驱动元件数(接收开口)以及接收聚焦(接收延迟)等。
图3是示出扫描次序(seq uence)的一个例子的图。
如图3所示,超声波探头12在由图像生成控制部31进行的控制下,关于第一光栅L1,进行基于第一发送接收条件的超声波发送接收,接下来,进行基于第二发送接收条件的超声波发送接收,接下来,进行基于第三发送接收条件的超声波发送接收。接下来,超声波探头12在由图像生成控制部31进行的控制下,关于第二光栅L2,进行基于第一发送接收条件的超声波发送接收,接下来,进行基于第二发送接收条件的超声波发送接收,接下来,进行基于第三发送接收条件的超声波发送接收。接下来,超声波探头12在由图像生成控制部31进行的控制下,关于第三光栅L3,进行基于第一发送接收条件的超声波发送接收,接下来,进行基于第二发送接收条件的超声波发送接收,接下来,进行基于第三发送接收条件的超声波发送接收。另外,各光栅中的超声波发送接收的顺序不限于图3所示的情况,例如,也可以是基于第二发送接收条件的超声波发送接收、基于第三发送接收条件的超声波发送接收、以及基于第一发送接收条件的超声波发送接收这样的顺序。
另外,图2所示的图像生成控制部31具有如下功能:控制信号处理电路22以及图像生成电路23生成基于通过第一发送接收条件的扫描而得到的接收信号的第一图像(第一剖面图像、第一体数据)、基于通过第二发送接收条件的扫描而得到的接收信号的第二图像(第二剖面图像、第二体数据)、以及基于通过第三发送接收条件的扫描而得到的接收信号的第三图像(第三剖面图像、第三体数据),并存储在图像存储器24中。
另外,图像生成控制部31也可以将第一发送接收条件、第二发送接收条件以及第三发送接收条件的发送条件设定为相同,另一方面将接收条件设定为分别不同。在该情况下,通过一次超声波发送而得到与三个发送接收条件相当的三种图像。因此,与使第一发送接收条件、第二发送接收条件以及第三发送接收条件的发送条件不同的情况相比,以1/3的发送时间结束,所以具有可以以通常的帧速率(在体数据的情况下体速率)进行差分处理或重叠处理的优点。
另外,在将第一发送接收条件、第二发送接收条件以及第三发送接收条件的发送条件设为相同,另一方面使接收条件不同的情况下,图像生成控制部31将第一发送接收条件设定为用于对回波信号中的低频带进行影像化的条件,将第二发送接收条件以及第三发送接收条件设定为在回波信号中的比较窄带的高频带中影像化的条件。另外,在将第一发送接收条件、第二发送接收条件以及第三发送接收条件的发送条件设为相同,另一方面使接收条件不同的情况下,图像生成控制部31将比较宽的波束声场、比较宽的超声波探头12的接收开口设定为第一发送接收条件,将比较窄的波束声场、比较窄的超声波探头12的接收开口设定为第二发送接收条件以及第三发送接收条件。
图4是示出图像生成电路23通过由图像生成控制部31进行的控制而生成的图像的一个例子的图。图4的左侧示出在向作为被检体P的琼脂幻影(agar phantom)刺入了穿刺针11a的状态下生成的第三图像,图4的右侧示出在向琼脂幻影刺入了穿刺针11a的状态下生成的第一图像。
根据图4的右侧所示的第一图像,关于穿刺针11a的针尖部分以外的幻影部分的浓淡,没有那么大的差异,相对于此,只有针尖部分的浓淡大大不同。在图4的右侧所示的第一图像中,与图4的左侧示出的第三图像相比,穿刺针11a的针尖部分可以与幻影部分清楚地区分开。
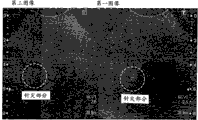
图5是示出描绘出两点(穿刺针11a的针尖部分-实质部分)的肝脏的图像的一个例子的图。图6是示出针尖部分与实质部分的RF信号的频谱的一个例子的图。
如图6所示,与来自穿刺针11a的针尖部分以外的实质部分的RF信号相比,在来自针尖部分的RF信号中高频分量少。这是因为,在穿刺针11a的针尖部分中,谐波分量的发生少、或者在低频侧中,在超声波波束中发生扩展而易于拾取在穿刺针11a的针尖部分散射的反射信号等。因此,在将影像化的频带设定为窄带并且比较高的频带的情况下,得到来自穿刺针11a的针尖部分的信号少的图像,所以适合于第二发送接收条件或第三发送接收条件。另一方面,在对比较低的频带进行影像化时,得到穿刺针11a的针尖部分可被清楚地区分的图像,所以适合于第一发送接收条件。
图7是图像生成电路23通过由图像生成控制部31进行的控制而生成的图像的一个例子的图。
图7的左上侧示出基于第一发送接收条件生成的刺入了穿刺针11a的琼脂幻影的第一图像,图7的左下侧示出基于第三发送接收条件生成的刺入了穿刺针11a的琼脂幻影的第三图像。另外,图7的右上侧示出基于第一发送接收条件生成的作为被检体P的肝脏的第一图像,图7的右下侧示出通过第三发送接收条件生成的肝脏的第三图像。
在对图7的左侧的上下所示出的琼脂幻影的第一图像以及第三图像进行比较时,在第一图像的情况下,如上所述,穿刺针11a的针尖部分可被清楚地区分,另一方面在第三图像的情况下,穿刺针11a的针尖部分并不清楚。另外,在对图7的右侧的上下所示出的肝脏的第一图像以及第三图像进行比较时,由于分解的差异而存在斑纹的细度等小的差异,但几乎看不出差异。
另外,图2所示的差分图像生成部32具有如下功能:对图像存储器24通过由图像生成控制部31进行的控制而存储的第一图像以及第二图像实施差分处理,生成差分图像(差分剖面图像、差分体数据)。另外,差分图像生成部32具有如下功能:对图像生成电路23通过由图像生成控制部31进行的控制而生成的第一图像以及第二图像,分别实施增益校正以使实质部分的亮度成为相同程度之后,对基于第一图像的第一校正图像(第一校正体数据)以及基于第二图像的第二校正图像(第二校正体数据)实施差分处理而生成差分图像。另外,差分图像生成部32既可以基于变换为通常的视频格式后的第一图像以及第二图像进行差分处理,也可以基于作为RAW数据的第一图像以及第二图像进行差分处理。
图8是示出差分图像的一个例子的图。
根据图8的上侧所示的琼脂幻影的差分图像、与图8的下侧所示的肝脏的差分图像,虽然多少包含噪声,但在琼脂幻影的差分图像中,穿刺针11a的针尖部分被抽出,另一方面在肝脏的差分图像中,组织被消除。即,在向生物体内刺入了穿刺针11a的情况下,可以通过差分图像仅抽出穿刺针11a。
另外,图2所示的重叠图像生成部33具有如下功能:基于由差分图像生成部32生成的差分图像、以及图像存储器24通过由图像生成控制部31进行的控制而存储的第三图像,执行重叠处理而生成重叠图像。另外,重叠图像生成部33具有如下功能:基于图像存储器24通过由图像生成控制部31进行的控制而存储的第一图像以及第三图像,执行重叠处理而生成重叠图像。另外,在通过由图像生成控制部31进行的控制进行了三维扫描时,重叠图像生成部33针对由差分图像生成部32生成的作为差分图像的差分体数据、以及图像存储器24通过由图像生成控制部31进行的控制而存储的作为第三图像的第三体数据中包含的任意的剖面,执行重叠处理而生成重叠图像。
图9是示出重叠图像的一个例子的图。
如图9所示,在用与第三图像不同的色调对由穿刺针11a的针尖部分构成的差分图像进行了影像化时,操作者可以简单地视觉辨认穿刺针11a的针尖部分的位置。另外,以往,在对穿刺针11a的进路进行监视的情况下,为了易于看见穿刺针11a的针尖部分而降低频率、或扩展波束,不得不使用与观察通常的生物体的画质相比劣化的发送接收条件,不适合于实质部分的显示。但是,在由重叠图像生成部33生成并显示重叠图像的情况下,可以重叠显示对穿刺针11a的针尖部分的显示有效的差分图像、与对实质部分的显示有效的以第三发送接收条件得到的第三图像。另外,操作者对操作面板15的开关15b等进行操作,从而还可以在任意的定时切换差分图像、重叠图像、第一图像(第一校正图像)、第二图像(第二校正图像)、以及第三图像的显示。
在此,在实际上对作为被检体P的生物体刺入穿刺针11a的情况下,实质部分不会通过由差分图像生成部32进行的差分处理完全被消除而有时残留在差分图像上。因此,重叠图像生成部33也可以将包括穿刺针11a的穿刺引导线g(图10中图示)的限定区域设定在差分图像内,基于区域限定的差分图像与第三图像执行重叠处理。另外,重叠图像生成部33也可以实施从差分图像中去除比较高的频带(阈值以上的频带)的滤波处理。在该情况下,重叠图像生成部33基于滤波处理后的差分图像与第三图像,执行重叠处理。另外,重叠图像生成部33也可以并非针对差分图像的整体,而仅对包括穿刺引导线g的限定区域实施滤波处理,基于滤波处理后的区域限定的差分图像与整体区域的第三图像,执行重叠处理。
另外,根据本实施方式的超声波诊断装置10,易于进行在差分图像上的从穿刺针11a的针尖部分的实质部分的分离,所以可以使用差分图像,根据具备穿刺针11a的穿刺接头11的位置信息,对刺入的实际(当前)的穿刺针11a的针尖部分进行检测。因此,在通过由图像生成控制部31进行的控制生成了差分体数据的情况下,重叠图像生成部33可以根据差分体数据,识别穿刺针11a的针尖部分的坐标。例如,重叠图像生成部33对差分体数据进行噪声去除处理或二值化处理等预处理,求出所检测出的穿刺针11a的针尖部分的重心作为穿刺针11a的针尖部分的第一坐标[x1,y1,z1](在差分剖面图像的情况下是第一坐标[x1,y1])。另外,由于穿刺接头11与超声波探头12的相对位置关系已知,所以重叠图像生成部33可以求出穿刺针11a的针尖部分必须通过的穿刺接头11上的第二坐标[x2,y2,z2]。
如上所述,重叠图像生成部33根据所求出的差分体数据内的第一坐标以及第二坐标,可以识别通过第一坐标以及第二坐标的本实施方式的实际的穿刺线G(图11图示)。在显示器14中显示穿刺线G。
图12A、图12B、以及图12C是示出进行三维扫描时的以往的穿刺引导线g的显示例的图。
图12A示出事先设定的穿刺引导线g上的第一剖面(A平面)的图像,图12B示出与第一剖面正交并且事先设定的穿刺引导线g上的第二剖面(截平面)的图像,图12C示出与第二剖面垂直的第三剖面(截平面)的图像。各图像被显示为运动图像。根据以往技术,第一坐标被设定在最终想要刺入穿刺针11a的针尖部分的穿刺对象的位置,但在刺入到体内的穿刺针11a的针尖部分从穿刺引导线g脱离时,穿刺针11a的像从各图像中消失,操作者无法视觉辨认穿刺针11a的位置。
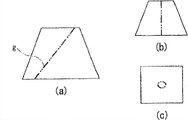
图13A、图13B、以及图13C是示出进行三维扫描时的本实施方式的穿刺线G的显示例的图。
图13A、图13B、以及图13C分别示出与图12A、图12B、以及图12C相同剖面的图像。由于根据由重叠图像生成部33实际检测出的针尖部分的第一坐标,适宜地运算出穿刺针11a的穿刺线G,所以在穿刺线G是三维坐标系的情况下,如图13A以及图13B所示可以显示将三维坐标系的穿刺线G投影到各剖面的投影穿刺线G’。另外,如图13C所示,对于第三剖面的图像,以穿刺线G与第三剖面的交点为中心而显示圆,由此可以显示穿刺针11a的针尖部分的预想到达位置。因此,操作者可以掌握穿刺针11a的准确位置,可以进行迅速且准确的穿刺。另外,在穿刺针11a从事先设定的穿刺引导线g脱离的情况下,也可以自动地变更剖面位置,以使穿刺线G显示在各剖面上。
另外,在图像存储器24中,通过由图像生成控制部31进行的控制,分别存储有多个帧的第一图像、多个帧的第二图像以及多个帧的第三图像。重叠图像生成部33根据差分图像,生成在各像素中保持了经时性地变化的亮度的最大值的亮度最大值图像,根据该亮度最大值图像与实时的第三图像,生成重叠图像。通过依次生成并显示基于亮度最大值图像以及实时的第三图像的重叠图像,在向体内刺入了穿刺针11a时,以运动图像显示穿刺针11a的针尖部分的轨迹,穿刺针11a的监视中的穿刺针11a的视觉辨认性提高。以往,在使用第三图像来生成保持了亮度的最大值的图像的情况下,由于对实质部分的像素也保持了亮度的最大值,所以无法利用保持了亮度的最大值的图像生成。
另外,超声波诊断装置10的图像生成控制部31不限于如下情况:根据基于通过低频的第一发送接收条件的扫描得到的超声波发送接收的接收信号而生成第一图像,根据基于通过高频的第二发送接收条件的扫描得到的超声波发送接收的接收信号而生成第二图像。例如,图像生成控制部31也可以控制信号处理电路22以及图像生成电路23,根据接收信号的基波(fundamental)分量,生成第一图像,并且,根据接收信号的谐波(harmonic)分量,生成第二图像,其中,上述接收信号是基于通过第一发送接收条件的扫描得到的超声波发送接收的接收信号。
图14是用于说明接收信号的基波分量以及谐波分量的图。
图14示出将横轴设为频率(MHz)、将纵轴设为信号强度电平(dB)的接收信号的频谱。如图14所示,接收信号包括基波分量与谐波分量(2次谐波分量、3次谐波分量)。接收信号的基波分量包括较多的穿刺针11a的针尖部分的信息,另一方面接收信号的谐波分量几乎不包括穿刺针11a的针尖部分的信息。
另外,在图2所示的图像生成控制部31中,还可以应用脉冲创造(pulse invention)法。图像生成控制部31也可以控制信号处理电路22以及图像生成电路23,根据通过第一发送接收条件的扫描而得到的接收信号的基波分量,生成第一图像,根据通过第一发送接收条件的扫描得到的接收信号、与包括包含在第一发送接收条件中的发送脉冲波形的逆相位的发送脉冲波形的通过第二发送接收条件的扫描而得到的接收信号的加法信号的二次谐波分量,生成第二图像。
图15是用于说明基于两个系统的接收信号的加法信号的图。
如图15所示,得到对左侧上段的通过第一发送接收条件的扫描而得到的接收信号、与左侧下段的通过第二发送接收条件的扫描而得到的接收信号进行加法处理后的加法信号。
根据本实施方式的超声波诊断装置10,在穿刺针11a的监视中,仅对穿刺针11a的针尖部分进行强调而显示包括针尖部分的被检体的图像,从而操作者可以简便地视觉辨认针尖部分的位置。
Claims (20)
1.一种超声波诊断装置,其特征在于,具有:
超声波探头,对二维或三维的扫描区域发送超声波,接收基于上述超声波的回波而作为接收信号;
控制单元,为了控制上述超声波探头,针对上述扫描区域内的光栅的每一个,依次进行基于第一发送接收条件的上述超声波的发送接收控制、基于与上述第一发送接收条件不同的第二发送接收条件的上述超声波的发送接收控制、以及基于与上述第一发送接收条件以及上述第二发送接收条件不同的第三发送接收条件的上述超声波的发送接收控制;
基本图像生成单元,分别生成基于利用上述第一发送接收条件得到的上述接收信号的第一图像、基于利用上述第二发送接收条件得到的上述接收信号的第二图像、以及基于利用上述第三发送接收条件得到的上述接收信号的第三图像;
差分图像生成单元,对上述第一图像以及上述第二图像实施差分处理而生成差分图像;以及
重叠图像生成单元,根据上述差分图像以及上述第三图像,执行重叠处理而生成重叠图像。
2.根据权利要求1所述的超声波诊断装置,其特征在于,
还具有用于刺入被检体的穿刺针,
上述超声波探头接收包括上述被检体内的上述穿刺针的针尖部分的上述扫描区域的上述回波,
上述控制单元为了控制上述超声波探头,进行基于来自上述穿刺针的针尖部分的反射信号相对上述针尖部分以外的实质部分比较强的上述第一发送接收条件、和来自上述穿刺针的针尖部分的反射信号相对上述针尖部分以外的实质部分比较弱的上述第二发送接收条件的上述超声波的发送接收控制。
3.根据权利要求2所述的超声波诊断装置,其特征在于,
还具有校正单元,该校正单元对上述第一图像以及上述第二图像进行增益校正,分别生成第一校正图像以及第二校正图像,
上述差分图像生成单元对上述第一校正图像以及上述第二校正图像实施上述差分处理。
4.根据权利要求2所述的超声波诊断装置,其特征在于,
上述重叠图像生成单元在作为上述重叠处理的原始数据的上述第一图像或上述差分图像内,设定包括上述穿刺针的引导线的限定区域,根据被设定了上述限定区域的上述第一图像与整体区域的上述第三图像、或者根据被设定了上述限定区域的上述差分图像与整体区域的上述第三图像,执行上述重叠处理。
5.根据权利要求2所述的超声波诊断装置,其特征在于,
还具有处理单元,该处理单元实施从作为上述重叠处理的原始数据的上述第一图像或上述差分图像中去除阈值以上的频带的滤波处理,
上述重叠图像生成单元根据上述滤波处理后的上述第一图像与上述第三图像、或者根据上述滤波处理后的上述差分图像与上述第三图像,执行上述重叠处理。
6.根据权利要求5所述的超声波诊断装置,其特征在于,
上述处理单元仅对包括上述穿刺针的引导线的限定区域实施上述滤波处理,根据上述滤波处理后的区域限定的上述第一图像与整体区域的上述第三图像、或者根据上述滤波处理后的区域限定的上述差分图像与整体区域的上述第三图像,执行上述重叠处理。
7.根据权利要求2所述的超声波诊断装置,其特征在于,
上述基本图像生成单元分别生成多个帧的上述第一图像、多个帧的上述第二图像以及多个帧的上述第三图像。
8.根据权利要求7所述的超声波诊断装置,其特征在于,
上述重叠图像生成单元针对每个帧,根据作为上述重叠处理的原始数据的上述第一图像或上述差分图像,生成在各像素中保持了经时性地变化的亮度的最大值的亮度最大值图像,根据上述亮度最大值图像与上述第三图像,执行上述重叠处理。
9.根据权利要求2所述的超声波诊断装置,其特征在于,
上述基本图像生成单元基于上述第一发送接收条件,根据与上述三维的扫描区域相关的剖面图像群,生成作为上述第一图像的第一体数据,基于上述第二发送接收条件,根据与上述三维的扫描区域相关的剖面图像群,生成作为上述第二图像的第二体数据,基于上述第三发送接收条件,根据与上述三维的扫描区域相关的剖面图像群,生成作为上述第三图像的第三体数据。
10.根据权利要求9所述的超声波诊断装置,其特征在于,
还具有附加单元,该附加单元根据作为上述重叠处理的原始数据的上述第一体数据、或基于上述第一体数据以及上述第二体数据的差分体数据,检测上述针尖部分的位置,根据上述位置与具备上述穿刺针的穿刺接头的位置信息,运算出上述穿刺针的穿刺线,对上述重叠图像附加上述穿刺线。
11.根据权利要求10所述的超声波诊断装置,其特征在于,
上述重叠图像生成单元生成作为上述重叠图像的正交3剖面图像,向上述正交3剖面图像,投影上述针尖部分的位置。
12.根据权利要求2所述的超声波诊断装置,其特征在于,
上述控制单元将上述第一发送接收条件、上述第二发送接收条件、以及上述第三发送接收条件的发送条件设为相同,另一方面使接收条件不同。
13.根据权利要求12所述的超声波诊断装置,其特征在于,
上述控制单元将上述第一发送接收条件设定为用于对上述接收信号中的低频带进行影像化的条件,将上述第二发送接收条件以及上述第三发送接收条件设定为在上述接收信号中的窄带的高频带中影像化的条件。
14.根据权利要求12所述的超声波诊断装置,其特征在于,
上述控制单元将宽的波束声场、宽的上述超声波探头的接收开口设定为上述第一发送接收条件,将窄的波束声场、窄的上述超声波探头的接收开口设定为上述第二发送接收条件以及上述第三发送接收条件。
15.一种超声波诊断装置,其特征在于,具有:
超声波探头,对二维或三维的扫描区域发送超声波,接收基于上述超声波的回波作为接收信号;
控制单元,为了控制上述超声波探头,针对上述扫描区域内的光栅的每一个,依次进行基于第一发送接收条件的上述超声波的发送接收控制、以及基于与上述第一发送接收条件不同的第三发送接收条件的上述超声波的发送接收控制;
基本图像生成单元,分别生成基于利用上述第一发送接收条件得到的上述接收信号的第一图像、以及基于利用上述第三发送接收条件得到的上述接收信号的第三图像;
重叠图像生成单元,根据上述第一图像以及上述第三图像,执行重叠处理而生成重叠图像;以及
用于刺入被检体的穿刺针,
上述超声波探头接收包括上述被检体内的上述穿刺针的针尖部分的上述扫描区域的上述回波,
上述控制单元为了控制上述超声波探头,进行基于来自上述穿刺针的针尖部分的反射信号相对上述针尖部分以外的实质部分比较强的上述第一发送接收条件、和来自上述穿刺针的针尖部分的反射信号相对上述针尖部分以外的实质部分比较弱的上述第三发送接收条件的上述超声波的发送接收控制。
16.根据权利要求15所述的超声波诊断装置,其特征在于,
上述控制单元将上述第一发送接收条件设定为用于对上述接收信号中的低频带进行影像化的条件,将上述第二发送接收条件以及上述第三发送接收条件设定为在上述接收信号中的窄带的高频带中影像化的条件。
17.一种超声波诊断图像生成方法,其特征在于,具有:
控制步骤,为了控制对二维或三维的扫描区域发送超声波、接收基于上述超声波的回波作为接收信号的超声波探头,针对上述扫描区域内的光栅的每一个,依次进行基于第一发送接收条件的上述超声波的发送接收控制、基于与上述第一发送接收条件不同的第二发送接收条件的上述超声波的发送接收控制、以及基于与上述第一发送接收条件以及上述第二发送接收条件不同的第三发送接收条件的上述超声波的发送接收控制;
基本图像生成步骤,分别生成基于利用上述第一发送接收条件得到的上述接收信号的第一图像、基于利用上述第二发送接收条件得到的上述接收信号的第二图像、以及基于利用上述第三发送接收条件得到的上述接收信号的第三图像;
差分图像生成步骤,对上述第一图像以及上述第二图像实施差分处理而生成差分图像;以及
根据上述差分图像以及上述第三图像,执行重叠处理而生成重叠图像的步骤。
18.根据权利要求17所述的超声波诊断图像生成方法,其特征在于,
在上述控制步骤中,在接收包括穿刺针的针尖部分的上述扫描区域的上述回波的情况下,为了控制上述超声波探头,进行基于来自上述穿刺针的针尖部分的反射信号相对上述针尖部分以外的实质部分比较强的上述第一发送接收条件、与来自上述穿刺针的针尖部分的反射信号相对上述针尖部分以外的实质部分比较弱的上述第二发送接收条件的上述超声波的发送接收控制。
19.一种超声波诊断图像生成方法,其特征在于,具有:
控制步骤,为了控制对包括穿刺针的针尖部分的二维或三维的扫描区域发送超声波、接收基于上述超声波的回波作为接收信号的超声波探头,依次进行基于来自上述穿刺针的针尖部分的反射信号相对上述针尖部分以外的实质部分比较强的第一发送接收条件的上述超声波的发送接收控制、和基于与上述第一发送接收条件不同的第三发送接收条件的上述超声波的发送接收控制;
生成基于利用上述第一发送接收条件得到的上述接收信号的第一图像、以及基于利用上述第三发送接收条件得到的上述接收信号的第三图像的步骤;以及
根据上述第一图像以及上述第三图像,执行重叠处理而生成重叠图像的步骤。
20.根据权利要求19所述的超声波诊断图像生成方法,其特征在于,
在上述控制步骤中,在接收包括穿刺针的针尖部分的上述扫描区域的上述回波的情况下,为了控制上述超声波探头,进行基于来自上述穿刺针的针尖部分的反射信号相对上述针尖部分以外的实质部分比较强的上述第一发送接收条件、与来自上述穿刺针的针尖部分的反射信号相对上述针尖部分以外的实质部分比较弱的上述第三发送接收条件的上述超声波的发送接收控制。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009-028034 | 2009-02-10 | ||
| JP2009028034A JP5438985B2 (ja) | 2009-02-10 | 2009-02-10 | 超音波診断装置及び超音波診断装置の制御プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101797167A CN101797167A (zh) | 2010-08-11 |
| CN101797167B true CN101797167B (zh) | 2012-11-14 |
Family
ID=42133512
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2010101041104A Active CN101797167B (zh) | 2009-02-10 | 2010-01-27 | 超声波诊断装置以及超声波诊断方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9119558B2 (zh) |
| EP (1) | EP2215969B1 (zh) |
| JP (1) | JP5438985B2 (zh) |
| CN (1) | CN101797167B (zh) |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9184369B2 (en) | 2008-09-18 | 2015-11-10 | Fujifilm Sonosite, Inc. | Methods for manufacturing ultrasound transducers and other components |
| US8663110B2 (en) | 2009-11-17 | 2014-03-04 | Samsung Medison Co., Ltd. | Providing an optimal ultrasound image for interventional treatment in a medical system |
| JP5645628B2 (ja) * | 2010-12-09 | 2014-12-24 | 富士フイルム株式会社 | 超音波診断装置 |
| EP2454996A1 (en) * | 2010-11-17 | 2012-05-23 | Samsung Medison Co., Ltd. | Providing an optimal ultrasound image for interventional treatment in a medical system |
| CN102525547A (zh) * | 2010-12-27 | 2012-07-04 | 通用电气公司 | 用于增强超声成像中针可视化的方法与装置 |
| JP5778429B2 (ja) * | 2011-01-04 | 2015-09-16 | 株式会社東芝 | 超音波診断装置 |
| JP6000569B2 (ja) | 2011-04-01 | 2016-09-28 | 東芝メディカルシステムズ株式会社 | 超音波診断装置及び制御プログラム |
| JP6109498B2 (ja) * | 2011-07-05 | 2017-04-05 | 東芝メディカルシステムズ株式会社 | 超音波診断装置及び超音波診断装置制御プログラム |
| JP2013081764A (ja) * | 2011-09-27 | 2013-05-09 | Toshiba Corp | 超音波診断装置及び超音波走査プログラム |
| JP5719275B2 (ja) * | 2011-10-25 | 2015-05-13 | オリンパスメディカルシステムズ株式会社 | 超音波内視鏡システム |
| KR101468418B1 (ko) * | 2012-01-13 | 2014-12-03 | 삼성메디슨 주식회사 | 초음파 영상 처리 방법 및 장치 |
| JP5645856B2 (ja) * | 2012-01-30 | 2014-12-24 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 送受信回路、超音波プローブ及び超音波画像表示装置 |
| JP5929368B2 (ja) | 2012-03-16 | 2016-06-01 | コニカミノルタ株式会社 | 超音波画像診断装置 |
| EP2878271A4 (en) * | 2012-07-27 | 2016-04-13 | Olympus Corp | ULTRASOUND OBSERVATION APPARATUS, METHOD FOR OPERATING ULTRASOUND OBSERVATION APPARATUS, AND OPERATING PROGRAM FOR ULTRASONIC OBSERVATION APPARATUS |
| CN103889337B (zh) | 2012-10-23 | 2016-11-02 | 东芝医疗系统株式会社 | 超声波诊断装置以及超声波诊断装置控制方法 |
| CN103845075B (zh) * | 2012-11-30 | 2016-09-28 | 通用电气公司 | 超声装置及超声成像方法 |
| GB201304798D0 (en) | 2013-03-15 | 2013-05-01 | Univ Dundee | Medical apparatus visualisation |
| AU2014231327C1 (en) * | 2013-03-15 | 2019-08-01 | Conavi Medical Inc. | Active localization and visualization of minimally invasive devices using ultrasound |
| JP6114663B2 (ja) * | 2013-08-27 | 2017-04-12 | 富士フイルム株式会社 | 超音波診断装置および超音波画像生成方法 |
| JP6207956B2 (ja) * | 2013-10-03 | 2017-10-04 | 東芝メディカルシステムズ株式会社 | 超音波診断装置 |
| JP6405712B2 (ja) * | 2014-05-30 | 2018-10-17 | コニカミノルタ株式会社 | 超音波診断装置 |
| CN104162223B (zh) * | 2014-08-27 | 2017-01-11 | 深圳开立生物医疗科技股份有限公司 | 一种穿刺引导线设置方法、装置和系统 |
| US10070837B2 (en) * | 2014-10-10 | 2018-09-11 | Canon Kabushiki Kaisha | Medical imaging apparatus, program installable in medical imaging apparatus, and medical imaging method |
| KR102035991B1 (ko) * | 2015-01-16 | 2019-10-25 | 지멘스 메디컬 솔루션즈 유에스에이, 인크. | 대상체의 영상을 형성하는 방법 및 초음파 시스템 |
| US10722216B2 (en) * | 2015-08-20 | 2020-07-28 | Konica Minolta, Inc. | Ultrasound image diagnostic apparatus |
| JP6172330B2 (ja) * | 2016-05-06 | 2017-08-02 | コニカミノルタ株式会社 | 超音波画像診断装置 |
| CN106236140B (zh) * | 2016-08-25 | 2019-11-08 | 成都优途科技有限公司 | 一种超声成像方法、装置及系统 |
| KR20180066781A (ko) * | 2016-12-09 | 2018-06-19 | 삼성전자주식회사 | 의료 영상을 표시하는 방법 및 장치 |
| CN107126260B (zh) * | 2017-07-18 | 2019-09-13 | 深圳开立生物医疗科技股份有限公司 | 超声波成像方法、系统及超声成像设备 |
| JP6800109B2 (ja) * | 2017-08-22 | 2020-12-16 | オリンパス株式会社 | 超音波内視鏡 |
| TWI743411B (zh) * | 2017-11-08 | 2021-10-21 | 美商富士膠片索諾聲公司 | 具有高頻細節的超音波系統 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4835712A (en) * | 1986-04-14 | 1989-05-30 | Pixar | Methods and apparatus for imaging volume data with shading |
| EP1416443A1 (en) * | 2002-10-28 | 2004-05-06 | Kabushiki Kaisha Toshiba | Image processing apparatus and ultrasound diagnosis apparatus |
| CN1718164A (zh) * | 2004-07-07 | 2006-01-11 | 株式会社东芝 | 超声波诊断装置、图像处理装置和图像处理方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3251682B2 (ja) | 1993-01-11 | 2002-01-28 | 株式会社東芝 | 超音波診断装置 |
| US5761331A (en) * | 1995-06-05 | 1998-06-02 | Intellectual Property Group Of Pillsbury Madison & Sutro Llp | Method and apparatus for tomographic imaging and image reconstruction using recombinant transverse phase differentials |
| JP2001061841A (ja) * | 1999-08-30 | 2001-03-13 | Toshiba Corp | 超音波診断装置及び超音波画像の生成方法 |
| JP2006150069A (ja) * | 2004-10-20 | 2006-06-15 | Toshiba Corp | 超音波診断装置及びその制御方法 |
| EP1803402A4 (en) | 2004-10-20 | 2008-10-29 | Toshiba Kk | ULTRASONIC DIAGNOSTIC EQUIPMENT AND CONTROL METHOD THEREFOR |
| JP4590293B2 (ja) * | 2005-04-11 | 2010-12-01 | 富士フイルム株式会社 | 超音波観測装置 |
| JP4381344B2 (ja) * | 2005-05-17 | 2009-12-09 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波診断装置 |
| WO2007114375A1 (ja) * | 2006-03-31 | 2007-10-11 | Kabushiki Kaisha Toshiba | 超音波診断装置及び超音波診断装置制御方法 |
| JP4891651B2 (ja) * | 2006-05-11 | 2012-03-07 | 日立アロカメディカル株式会社 | 超音波診断装置 |
| JP2008012150A (ja) * | 2006-07-07 | 2008-01-24 | Toshiba Corp | 超音波診断装置、及び超音波診断装置の制御プログラム |
-
2009
- 2009-02-10 JP JP2009028034A patent/JP5438985B2/ja active Active
-
2010
- 2010-01-27 CN CN2010101041104A patent/CN101797167B/zh active Active
- 2010-02-09 EP EP10001322.6A patent/EP2215969B1/en active Active
- 2010-02-12 US US12/705,074 patent/US9119558B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4835712A (en) * | 1986-04-14 | 1989-05-30 | Pixar | Methods and apparatus for imaging volume data with shading |
| EP1416443A1 (en) * | 2002-10-28 | 2004-05-06 | Kabushiki Kaisha Toshiba | Image processing apparatus and ultrasound diagnosis apparatus |
| CN1718164A (zh) * | 2004-07-07 | 2006-01-11 | 株式会社东芝 | 超声波诊断装置、图像处理装置和图像处理方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2215969B1 (en) | 2016-12-21 |
| EP2215969A1 (en) | 2010-08-11 |
| CN101797167A (zh) | 2010-08-11 |
| JP5438985B2 (ja) | 2014-03-12 |
| US20100204579A1 (en) | 2010-08-12 |
| JP2010183935A (ja) | 2010-08-26 |
| US9119558B2 (en) | 2015-09-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101797167B (zh) | 超声波诊断装置以及超声波诊断方法 | |
| CN103179907B (zh) | 超声波诊断装置及超声波扫描方法 | |
| CN103118598B (zh) | 超声波诊断装置、超声波图像显示装置及方法 | |
| CN103251429B (zh) | 超声波成像装置 | |
| EP1546759B1 (en) | Ultrasound-imaging system and method for a user-guided three-dimensional volume-scan sequence | |
| CN101721224B (zh) | 超声波诊断装置以及超声波图像处理装置 | |
| JP5433240B2 (ja) | 超音波診断装置及び画像表示装置 | |
| JP6615603B2 (ja) | 医用画像診断装置および医用画像診断プログラム | |
| CN103702615B (zh) | 超声波探头以及超声波诊断装置 | |
| CN103889337A (zh) | 超声波诊断装置以及超声波诊断装置控制方法 | |
| US20070038091A1 (en) | Ultrasonic diagnostic apparatus and ultrasonic transmission method | |
| CN104981208A (zh) | 超声波诊断装置及其控制程序 | |
| CN103169500A (zh) | 超声波诊断装置、医用图像诊断装置以及医用图像处理方法 | |
| CN102247171A (zh) | 超声波诊断装置、超声波图像处理装置以及医用图像诊断装置 | |
| CN102258385A (zh) | 图像诊断方法及装置 | |
| US4078435A (en) | Simultaneous display of compound and simple ultrasound scans | |
| CN111110277B (zh) | 超声成像方法、超声设备及存储介质 | |
| CN101884553A (zh) | 超声波诊断装置、超声波图像处理装置及超声波图像处理方法 | |
| US9566044B2 (en) | Medical image display apparatus and ultrasonic diagnosis apparatus | |
| CN102365054B (zh) | 超声波诊断装置及超声波图像处理装置 | |
| CN102626328B (zh) | 超声波诊断装置、超声波图像处理装置及取得方法 | |
| JP2005342194A (ja) | 超音波診断装置 | |
| JP2007135994A (ja) | 超音波診断装置及び超音波画像データ生成方法 | |
| JP2001017428A (ja) | オパシティ設定方法、3次元像形成方法および装置並びに超音波撮像装置 | |
| CN102125443B (zh) | 超声波诊断装置以及超声波图像处理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C41 | Transfer of patent application or patent right or utility model | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20160718 Address after: Japan Tochigi Patentee after: Toshiba Medical System Co., Ltd. Address before: Tokyo, Japan, Japan Patentee before: Toshiba Corp Patentee before: Toshiba Medical System Co., Ltd. |