CN100554868C - 位置测量装置 - Google Patents
位置测量装置 Download PDFInfo
- Publication number
- CN100554868C CN100554868C CNB2006100996840A CN200610099684A CN100554868C CN 100554868 C CN100554868 C CN 100554868C CN B2006100996840 A CNB2006100996840 A CN B2006100996840A CN 200610099684 A CN200610099684 A CN 200610099684A CN 100554868 C CN100554868 C CN 100554868C
- Authority
- CN
- China
- Prior art keywords
- measuring body
- optical grating
- divided beams
- measurement
- measurement device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000005259 measurement Methods 0.000 title claims abstract description 112
- 230000003287 optical effect Effects 0.000 claims abstract description 121
- 238000010276 construction Methods 0.000 claims abstract description 104
- 230000009471 action Effects 0.000 claims abstract description 33
- 239000000758 substrate Substances 0.000 claims description 15
- 230000000694 effects Effects 0.000 claims description 11
- 230000010287 polarization Effects 0.000 claims description 11
- 238000001514 detection method Methods 0.000 claims description 10
- 238000006073 displacement reaction Methods 0.000 claims description 8
- 238000000926 separation method Methods 0.000 claims description 8
- 230000008859 change Effects 0.000 claims description 3
- 230000007246 mechanism Effects 0.000 claims description 2
- 238000000034 method Methods 0.000 description 5
- 230000010363 phase shift Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 238000007639 printing Methods 0.000 description 3
- 230000033228 biological regulation Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 239000004020 conductor Substances 0.000 description 2
- 230000001447 compensatory effect Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000005622 photoelectricity Effects 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
- 230000011514 reflex Effects 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/36—Forming the light into pulses
- G01D5/38—Forming the light into pulses by diffraction gratings
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34707—Scales; Discs, e.g. fixation, fabrication, compensation
- G01D5/34715—Scale reading or illumination devices
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optical Transform (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
本发明涉及一个用于获得一个扫描单元以及一个在至少一个测量方向上移动的测量体的相对位置的位置测量装置。该扫描单元包括多个光栅结构以及至少一个反射元件。所述元件设置在扫描单元里面,使得由测量体衍射的光束在扫描单元中穿过第一光栅结构,接着显现在反射元件上,由反射元件实现在测量体方向上的一个向后反射然后使分光束穿过第二光栅结构并接着重新显现在测量体上。这样构成第一和第二光栅结构,使得在分光束第一次和第二次通过时对于分光束产生一个确定的透镜折射作用。
Description
技术领域
本发明涉及一种位置测量装置。
背景技术
例如由WO 02/23 131已知一个这样的位置测量装置。这个装置除了一个例如由直线的发光测量尺构成的测量体以外还包括一个在至少一个测量方向上可相对移动的扫描单元。在扫描单元侧面上除了一个扫描光栅以外还设置多个光电的检测单元,其中包括至少一个后向反射镜形式的光学反射元件。通过这个后向反射镜实现由测量体首次反射的分光束在测量体的方向上向后反射。然后在那里在干涉的分光束最终到达检测器并且在那里根据位移产生调制的扫描信号之前,使分光束接着被第二次反射。在这种位置测量装置中反射元件由具有光学向后反射功能的屋脊棱镜构成。例如由文献EP 387 520 B1或EP 1 347271 A1已知其它的具有由棱镜式向后反射元件构成的光学反射元件的位置测量装置。
由位置测量装置的现有技术已知的以不同的棱镜变化为基础的反射元件对于加工的结构部件相对费事。为此使这个结构部件相对较大地制成并因此不期望地加大扫描单元。
发明内容
本发明的目的是,实现一个位置测量装置,其中保证一个尽可能紧凑的扫描单元结构。
这个目的按照本发明通过一种位置测量装置得以实现。
该位置测量装置包括:
-测量体和
-相对于测量体在至少一个测量方向上移动的扫描单元,其中该扫描单元包括多个光栅结构以及至少一个反射元件,其中
-所述位置测量机构能获得扫描单元相对于测量体的相对位置,
其特征在于,
-所述多个光栅结构以及所述至少一个反射元件设置在扫描单元里面,使得由测量体衍射的光束在向着扫描单元的方向上传播,在那里这些光束穿过第一光栅结构,接着显现在反射元件上,由反射元件实现在向着测量体的方向上的向后反射,并且通过向着测量体的方向上的向后反射来反射的分光束穿过第二光栅结构并接着重新在测量体上显现,并且
-其中构造第一和第二光栅结构,使得在所述分光束分别通过时在所述分光束上产生确定的透镜折射作用。
还给出了按照本发明的位置测量装置的有利实施方式。
按照本发明规定,所述元件设置在扫描单元里面,使得在测量体上产生的光束衍射地在扫描单元方向上传播,在那里这些光束穿过第一光栅结构。接着分光束到达反射元件,由反射元件实现向测量体方向上的一个向后反射,之后使分光束穿过第二光栅结构并重新到测量体上。在此构造第一和第二光栅结构,使得在分光束第一次通过和第二次通过时在分光束上产生一个确定的透镜折射作用。
代替复杂和大体积构成的以棱镜为基础的向后反射元件按照本发明在扫描单元中使用一个结构单元,它由一个或多个简单的反射元件和具有确定的光学透镜折射作用的第一和第二光栅结构组成。在此光栅结构承担着一个向后反射功能同时也承担着一个扫描光栅的功能。由此能够实现这个结构单元的一个平面结构,它也能够实现这个结构单元的简单且经济的装配。
所述光栅结构和至少一个反射元件可以设置在不同的部件、例如一个反射板和一个扫描板上。但是同样也能够实现一个紧凑的整体结构,其中光栅结构和至少一个反射元件设置在一个唯一的支架衬底上。
在通过第一光栅结构时作为透镜折射作用最好在测量方向上产生一个与入射方向反平行取向的偏转作用以及产生一个垂直于测量方向向着反射元件的聚焦作用。在通过第二光栅结构时作为透镜折射作用产生一个在测量方向上的偏转作用以及一个垂直于测量方向的准直作用。
此外优选构成所述第一和第二光栅结构,使通过所产生的偏转作用在第一次和第二次通过时在第一和第二光栅结构上产生一个在分光束的显现点之间的光束位移。
在一个可能实现的实施例中第一和第二光栅结构由相位光栅构成,它们抑制0级衍射级(Beugungsordnung)。
特别有利的是所述第一和第二光栅结构由光亮的(geblazt)相位光栅构成,它在+1级衍射级或者在-1级衍射级中具有高效率。
在此可以使所述第一和第二光栅结构具有弯曲的光栅线,它们在测量方向上等距地设置。
在一个可能实现的实施例中所述至少一个反射元件由平面镜反射器构成。
所述平面镜反射器最好平行于测量体设置在扫描单元里面。
在一个有利的实施例中所述扫描单元包括一个透明的支架衬底,在其面对测量体的侧面上设置第一和第二光栅结构。至少一个平面镜反射器或者设置在支架衬底的与此相反的侧面上,其中该平面镜反射器的反射面对准测量体方向。也可以选择使至少一个平面镜反射器设置在支架衬底的相同侧面上,其中平面镜反射器的反射面背对测量体。
最好构成所述第一和第二光栅结构,使得一个第一次在测量体上显现的准直分光束在第二次在测量体上显现以后准直地在扫描单元方向上传播。
不同的光栅结构以有利的方式具有对应于光栅结构与反射元件之间的光学距离的焦距。
在按照本发明的位置测量装置的一个可能实现的实施例中构成所述扫描单元,使得由一个光源发出的光束第一次在测量体上显现,测量体由反光衍射光栅构成,在那里分离成两个向后反射到扫描单元的分光束,它们对应于两个不同的衍射级。两个向后反射的分光束在扫描单元中在两个反射元件的方向上穿过两个第一光栅结构并且在此获得一个与入射方向反平行取向的偏转作用以及一个只垂直于测量方向的聚焦作用。这种偏转和聚焦的分光束射到反射元件上并且获得一个在测量体方向上的向后反射。两个向后反射的分光束在测量体方向上穿过两个第二光栅结构并同时获得一个在测量方向上的偏转作用以及一个仅垂直于测量方向的准直作用。两个分光束再射到测量体上,在那里使分光束在扫描单元的方向上产生新的衍射和向后反射。
在按照本发明的位置测量装置的一个替换的实施例中构成所述扫描单元,使得由一个光源发出的光束第一次在测量体上显现,测量体由反光衍射光栅构成,在那里分离成两个向后反射到扫描单元的分光束,它们对应于两个不同的衍射级。两个向后反射的分光束在扫描单元中在两个反射元件的方向上穿过两个第一光栅结构并且在此获得一个与入射方向反平行取向的偏转作用以及在测量方向及垂直于测量方向上的聚焦作用。这种偏转和聚焦的分光束射到反射元件上并且获得一个在测量体方向上的向后反射。两个向后反射的分光束在测量体方向上穿过两个第二光栅结构并同时获得一个在测量方向上的偏转作用以及一个不仅在测量方向而且垂直于测量方向的准直作用。两个分光束再射到测量体上,在那里使分光束在扫描单元的方向上产生新的衍射和向后反射。
按照本发明的位置测量装置的一个可能实现的变型方案规定,在第二次由测量体垂直于扫描单元方向向后反射之后向后反射的分光束叠加地在一个分离光栅上显现,在那里实现在多个空间方向上的分离并且在不同空间方向上分离的分光束在一个光电检测装置的多个检测器上显现。在那里在扫描单元与测量体相对运动的情况下分别实现一个根据位移进行调制的扫描信号。
在这个变型方案中可以规定,或者在反射元件与第二光栅结构之间或者在第二光栅结构与测量体之间在光程中设置光学极化的元件,分光束在反射元件上向后反射以后通过光学极化元件并且使线性极化的分光束转化成圆极化的分光束。
为了产生移相的扫描信号也可以规定,或者两个第一和两个第二光栅结构的平均光栅常数选择得与测量体的光栅常数略微不同或者两个第一和两个第二光栅结构的光栅线条以一个偏离0°的角度相对于测量体的光栅线条设置。
此外在按照本发明的位置测量装置的光程中具有一个光学有效的窗口部位,由光源发出的光束在第一次在测量体上显现之前穿过该窗口部位,其中在光学有效的窗口部位中设置一个偏转光栅,其光栅线条平行于测量方向延伸。
附图说明
借助于下面结合附图对于实施例的描述解释本发明的其它细节和优点。附图中:
图1为按照本发明的位置测量装置的第一实施例的扫描光程的第一部分;
图2为按照本发明的位置测量装置的第一实施例的扫描光程的第二部分;
图3为按照本发明的位置测量装置的第一实施例的扫描光程的另一视图;
图4为按照本发明的位置测量装置的第一实施例的扫描板的俯视图;
图5为按照本发明的位置测量装置的第一实施例的反射板的俯视图;
图6a和6b分别为在第一实施例的扫描单元中用于构成反射元件和光栅结构的可选择变型方案;
图7为按照本发明的位置测量装置的第一实施例的另一变型方案的扫描光程图;
图8为图7中的位置测量装置的扫描板的俯视图;
图9为图7中的位置测量装置的纺纱杯的俯视图;
图10为按照本发明的位置测量装置的第二实施例的扫描光程的第一部分;
图11为按照本发明的位置测量装置的第二实施例的扫描光程的第二部分;
图12为按照本发明的位置测量装置的第二实施例的扫描光程的另一视图。
具体实施方式
下面借助于图1-5描述按照本发明的位置测量装置的第一实施例,该位置测量装置由发光系统构成。在此图1和2分别以示意图示出部分扫描光程在x-z平面中的一个侧视图,而图3示出扫描光程在y-z平面中的一个扫描光程图。在图1中示出从光源21一直到反射元件26.1或26.2的扫描光程,图2示出从反射元件26.1或26.2一直到光电检测装置的检测元件29.1,29.2,29.3的扫描光程。图4和5分别示出扫描板25以及反射板23与位于那里的光学元件的俯视图。
按照本发明位置测量装置包括一个测量体10以及一个在至少一个测量方向x上相对移动的扫描单元20。通过测量体10和扫描单元20以公知的方式和方法耦合要借助于位置测量装置确定其相对位置的物体。在此例如可以是一个机器零件,必需精确地获得其位置;通过位置测量装置产生的扫描信号或位置数据由一个未示出的后序电路(Folgeelektronik)或者分析单元例如为了控制机器而继续处理。
在所示实施例中示出一个位置测量装置,用于通过一个直线延伸的测量体检测直线运动;当然也可以以按照本发明的思想为基础实现一个旋转的位置测量装置。
下面借助于图1-5描述按照本发明的位置测量装置的第一实施例的基本扫描光程。
在所示实施例中由光源21、例如一个激光二极管发出的线性极化的光束首先通过一个准直镜22准直,即转换成一个平行的光束。接着使这个光束穿过一个反射板23的和一个扫描板25的光学无效的窗口部位28.1,27。在这个示例中所示反射板23和扫描板25由一个板状的透明的支架衬底、例如由玻璃组成,在其上设置一系列光学元件,如反射元件26.1,26.2和光栅结构24.1-24.4,32。下面还要详细描述在扫描光程中不同的光学元件的具体功能。
接着使准直的光束第一次射到测量体10,它在这个实施例中由直线的反光尺构成。该测量体10包括一个在测量方向x上延伸的周期的刻度区域结构,它具有不同的光学特性。在本实施例中测量体10是一个反射-衍射光栅,其光栅线条在测量体平面中在给定的y向上延伸;对此在下面也可以称为所谓的线条方向y。
在入射的光束在测量体10上出现时分成两个分光束,它们作为+/-1级的衍射级在向扫描单元20的方向上向后反射。在扫描单元20中分光束分别穿过第一光栅结构24.1,24.2,它们在那里设置在扫描板25上。第一光栅结构24.1,24.2按照本发明对于穿过的分光束施加一个确定的光学透镜折射作用。在此一方面涉及一个对于分光束的确定的偏转作用,其中使分光束与入射方向反平行地(antiparallel)在测量方向x上偏转。另一方面对于分光束涉及一个在垂直于测量方向上、即在y向或者在测量体10的线条方向上分别到后置的反射元件26.1,26.2的聚焦作用。在图3中示出所述的在线条方向y上的聚焦作用;在图1中表示两个分光束的前面所述的偏转作用和主传播方向。
为了实现第一光栅结构24.1,24.2的这种透镜折射作用,使第一光栅结构24.1,24.2在扫描板25上由所谓的轴外圆柱透镜(offaxis-Zylinderlinsen)构成。其焦距对应于与反射板23的光学距离。第一光栅结构24.1,24.2的这种光学特性的形成起到使聚焦的分光束的主光束在线条方向y上以一个确定的角度射到反射板23上并由此产生在反射板23上入射和反射的分光束空间分离的作用;对此参看图3。
在图4中示出扫描板25与设置在其上的第一光栅结构24.1,24.2的俯视图。可以看出,第一光栅结构24.1,24.2分别具有弯曲的光栅线,它们在测量方向x上等距地设置。第一光栅结构24.1,24.2最好由相位光栅构成,它们抑制0级衍射级;特别有利的是所谓的光亮相位光栅,它们在+1衍射级或在-1衍射级中具有一个高效率。
接着使这种偏转和聚焦的分光束到达反射元件26.1,26.2,它们在所示实施例中设置在反射板23的顶面上并且由平面镜反射器构成。
由反射元件26.1,26.2实现分光束在向测量体10方向上的一个向后反射。在分光束第二次到达测量体10之前,在所示实施例中这些分光束在扫描单元20中首先还分别穿过一个λ/4板形式的光学极化元件31.1,31.2并接着穿过第二光栅结构24.3,24.4,它们同样设置在扫描板25上。对此仍然参看附图3。
通过光学极化元件31.1,31.2由线性极化的分光束分别产生相反地圆极化的分光束。第二光栅结构24.3,24.4对于穿过的分光束同样具有一个确定的透镜折射作用。在此圆极化的分光束获得一个在测量方向x上的偏转作用以及至少一个垂直于测量方向x、即在线条方向y上的准直作用。第二光栅结构24.3,24.4在这个实施例中最好由所谓的轴外透镜构成;其余地对于本实施方式的相应构成请参照第一光栅结构24.1,24.2。
由于所述的在第一次和第二次通过光栅结构24.1-24.4时产生的偏转作用使分光束在第一和第二光栅结构24.1-24.4上产生一个在分光束的第一和第二显现点之间的光束位移。
接着使通过第二光栅结构24.3,24.4这样偏转且至少在y向上(部分)准直的分光束第二次到达测量体10,在那里使分光束以+/-1级衍射级的形式在扫描单元20的方向上产生新衍射和向后反射。在测量体10上反射后垂直于扫描单元20的方向向后反射的分光束作为叠加的、现在仍然是线性极化的光束进入分离光栅32,分离光栅设置在扫描板25上。在分离光栅32上出现的光束的极化方向取决于测量体10与扫描单元20的相对位置。如果测量体10例如在测量方向x上移动其光栅常数的四分之一,则由于所产生的在测量体10上在+/-1级衍射级中的第二次衍射产生一个360°的在叠加的分光束之间的相位移。所产生的线性极化光束的极化方向改变180°,这在所产生的扫描信号中对应于一个信号周期。
所述示例的分离光栅32具有一个在测量方向x上周期性的分结构,其分线条在y向上延伸。在分离光栅32上如图所示使入射的光束在三个不同的空间方向上产生分离。在不同的空间方向上分别定位一个光电检测装置的检测元件29.1-29.3,分离的光束在穿过反射板23上的光学无效的窗口部位28.2以后到达检测元件上。在测量体10与扫描单元20相对移动的情况下在检测元件29.1-29.3上产生根据位移进行调制的扫描信号,它们以公知的方式和方法继续进行处理。在检测元件29.1-29.3的前面分别设置另一极化器形式的光学极化元件30.1-30.3,用于通过这种方式和方法产生三个相差+/-120°相位的扫描信号。
所述位置测量装置的最大优点是,代替用于在扫描单元的扫描光程中实现偏转功能和扫描光栅功能的复杂棱镜可以与一个简单的平面镜反射器相结合使用一个最好衍射的第一和第二光栅结构形式的光栅结构。
所述第一实施例在本发明的范围内还可以变化或补充;下面简述一些变化方案。
可以使起到使线性极化的分光束转换成相反的圆极化的分光束的光学极化元件31.1,31.2不设置在反射元件26.1,26.2与第二光栅结构24.3,24.4之间,而是在后续的光程中才设置在第二光栅结构24.3,24.4与测量体10之间。
此外可以使反射元件26.1,26.2也完全设置在反射板23的底面上。
代替上述用于产生移相的扫描信号的光学极化变型方案也可以在本发明的范围内选择产生同样的信号。为此可以考虑公知的所谓游标(Vernier)或莫阿(Moiré)扫描原理,其中选择使测量体与第一和第二光栅结构的光栅常数略微不同(Vernier系统)或者选择具有少许差别的角度取向(Moiré系统)。在检测平面中产生一个周期的条纹图形,它根据位移进行调制并且可以通过公知的方式和方法扫描。
在这个实施例中省去所述第一实施例的所有光学极化结构部件、即上述的λ/4板31.1,31.2、极化器30.1,30.2,30.3以及分离光栅32。在这种实施例的检测平面中例如可以定位一个所谓形成结构的检测装置,通过它实现在那里产生的条纹图形的扫描和将其转换成移相的扫描信号。在这个实施例中除这种检测的变型方案外也可以选择使用光学结构部件如圆柱透镜阵列或者与平面检测器相结合的光栅结构用于扫描条纹图形。
在按照本发明的位置测量装置的第一实施例的另一变化形式中可以在扫描单元中规定,代替分开的扫描板和反射板选择一个整体的结构,其中只具有一个唯一的透明支架衬底,在其上不仅设置不同的光栅结构而且设置反射元件。在图6a和6b中示意示出相应的实施例。
在图6a的示例中与前面图3的视图类似以一个局部视图示出在y-z平面中在扫描光程中的相应结构部件。代替独立的用于扫描板和反射板的元件具有一个唯一的透明的支架衬底40,在其底面或者面对未示出的测量体的一侧上设置第一和第二光栅结构44.1,44.2。在相反的侧上或者支架衬底40的顶面上设置仍然由简单的平面镜反射器构成的反射元件46.1。
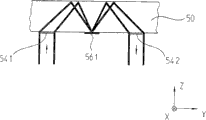
图6b示出一个整体结构的类似变化方案。仍然只有一个唯一的透明的支架衬底50,其中在光学上重要的以第一和第二光栅结构54.1,54.2形式的元件以及反射元件56.1都设置在支架衬底的底面上。分光束在支架衬底50的相反顶面上所需的偏转例如可以通过定位在那里的其它反射元件或反射层实现。
对于按照图6a或图6b的整体结构如果光束斜度在支架衬底50中由于相应细微的光栅结构44.1,44.2,54.1,54.2而足够地大,由此产生全反射,则可以完全省去安置反射层。更细微的光栅结构44.1,44.2,54.1,54.2在此提供了显著的优点,产生更少的衍射级并由此在所期望的衍射级中保留更多的光功率。
另一可选择的实施例是,不必如上述示例所述那样使光源强制地组合在扫描单元里面。例如可以使光源远离扫描单元地设置并且使衍射光束通过光导体输送到扫描单元。
另外对于光电检测装置的检测元件也同样是有效的,即,它们同样可以在空间上与自己的扫描单元分开地设置。然后使要被检测的分光束例如通过光导体输送到检测元件。
在图7-9中示意示出第一实施例的另一变型方案。在此这个实施例的功能相同的元件通过与上述示例一致的附图标记表示。下面只描述与上述示例不同的部分,其余部分请参照上述实施例。
在这个变型方案中规定,在对于上述示例中的光程中扫描板和反射板25,23的光学无效窗口部位27,28.1,28.2中分别设置偏转光栅27.1,28.3。所述偏转光栅27.1,28.3分别具有分线条,它们周期地设置在y向上并且在测量方向x上延伸。选择两个偏转光栅27.1,28.3在光学有效的窗口部位中的周期性是一致的。
这种偏转光栅27.1,28.3在扫描板和反射板23,25的相应窗口部位中在光程中的存在具有可以补偿光源的可能的波长变化的作用。此外,当第一和第二显现点在第一和第二光栅结构中移动的时候,这就意味着仿佛有效的测量点移动,由于衍射地构成的第一和第二光栅结构24.1-24.4可能的波长变化可能起到一个不期望的光束偏移在y向上位移的作用。所述偏转光栅27.1,28.3的布置如同所规定的那样使得可能的波长变化反向作用于第一和第二显现点并由此保持有效的光束偏移或有效的测量点不变。
当然也能够与这个变型方案相结合实现不同的、上面所讨论的可选择实施例。
下面借助于图10-12描述按照本发明的位置测量装置的第二实施例。按照本发明的位置测量装置的这个实施例的基本结构以及扫描光程路线基本上与所述第一实施例相同。因此下面只描述重要的不同之处。
第一光栅结构124.1,124.2作为透镜折射作用除了按照图1-5的第一示例的功能还具有一个附加的对于通过的分光束在测量方向x上的聚焦作用。这一点例如在图10中可以看出。第一光栅结构在此作为相应设计尺寸的轴外透镜构成,其焦距对应于与反射板123的光学距离。第一光栅结构124.1,124.2的光学特性的这种设计起到使聚焦的分光束的主光束在测量方向x上垂直地到达反射板123的作用,而在线条方向y上处于一个确定的角度。选择这个角度,使得入射和反射到反射板123上的分光束仍然在y向上实现一个空间分离。在反射元件126.1,126.2上反射后穿过第二光栅结构124.3,124.4时所述分光束仍然获得一个与在上述示例中所述相同的光学透镜折射作用,即,实现一个与入射方向反平行的偏转以及分光束的一个准直。
在这个实施例中作为轴外透镜构成的第一光栅结构124.1,124.2在此使各分光束聚焦在两个侧面的方向x,y上并因此以其光学透镜折射作用对应于常见的圆柱对称的透镜。在此不同之处是,第一示例的轴外圆柱透镜仅仅在y向上具有一个聚焦作用形式的透镜作用。
此外对于按照本发明的位置测量装置的这个实施例的具体功能重要的是,所述反射板123尽可能平行于测量体设置。
因此通过第一光栅结构的附加光学作用在这个实施例中实现一个由光栅结构124.1-124.4与反射元件126.1,126.2在扫描光程中的共同作用组成的一个光学的反射功能。代替一个这样的与目前通过费事的三角棱镜等同样实现的反射功能,可以使相同的光学作用通过明显简单构成的衍射元件实现。
而且对于这个实施例也可以实现所有上述的可选择的措施,即,对于按照本发明的位置测量装置的这个实施例在本发明的范围里也具有各种变型方案。
最后要指出,替换上述反光位置测量装置按照本发明当然也构成透光位置测量装置。例如由第一光栅结构、一个反射板和第二光栅结构组成的扫描侧的装置也可以用来使来自透光测量体的分光束在其第一次通过这个测量体以后再偏转返回到透光测量体等。相应的扫描单元必需以公知的方式和方法包围测量体。
Claims (20)
1.位置测量装置,包括:
-测量体和
-相对于测量体在至少一个测量方向上移动的扫描单元,其中该扫描单元包括多个光栅结构以及至少一个反射元件,其中
-所述位置测量机构能获得扫描单元相对于测量体的相对位置,
其特征在于,
-所述多个光栅结构以及所述至少一个反射元件设置在扫描单元(20;120)里面,使得由测量体(10;110)衍射的光束在向着扫描单元(20;120)的方向上传播,在那里这些光束穿过第一光栅结构(24.1,24.2;124.1,124.2),接着显现在反射元件(26.1,26.2;126.1,126.2)上,由反射元件实现在向着测量体(10;110)的方向上的向后反射,并且通过向着测量体的方向上的向后反射来反射的分光束穿过第二光栅结构(24.3,24.4;124.3,124.4)并接着重新在测量体(10;110)上显现,并且
-其中构造第一和第二光栅结构(24.1,24.2;24.3,24.4;124.1,124.2;124.3,124.4),使得在所述分光束分别通过时在所述分光束上产生确定的透镜折射作用。
2.如权利要求1所述的位置测量装置,其特征在于,构造所述第一和第二光栅结构(24.1,24.2;24.3,24.4;124.1,124.2;124.3,124.4),使
-在通过第一光栅结构(24.1,24.2;124.1,124.2)时,作为透镜折射作用产生与入射方向反平行取向的在测量方向(x)上的偏转作用以及垂直于测量方向向着反射元件(26.1,26.2;126.1,126.2)的聚焦作用和
-在通过第二光栅结构(24.3,24.4;124.3,124.4)时,作为透镜折射作用产生在测量方向(x)上的偏转作用以及至少垂直于测量方向的准直作用。
3.如权利要求2所述的位置测量装置,其特征在于,构造所述第一和第二光栅结构(24.1,24.2;24.3,24.4;124.1,124.2;124.3,124.4),使得在第一次和第二次通过时,通过所产生的偏转作用在第一和第二光栅结构(24.1,24.2;24.3,24.4;124.1,124.2;124.3,124.4)上产生在通过向着测量体的方向上的向后反射来反射的分光束的显现点之间的光束偏移。
4.如权利要求1所述的位置测量装置,其特征在于,所述第一和第二光栅结构(24.1,24.2;24.3,24.4;124.1,124.2;124.3,124.4)由相位光栅构成,它们抑制0级衍射级。
5.如权利要求4所述的位置测量装置,其特征在于,所述第一和第二光栅结构(24.1,24.2;24.3,24.4;124.1,124.2;124.3,124.4)由光亮的相位光栅构成,它在+1级衍射级或者在-1级衍射级中具有高效率。
6.如权利要求1所述的位置测量装置,其特征在于,所述第一和第二光栅结构(24.1,24.2;24.3,24.4;124.1,124.2;124.3,124.4)具有弯曲的光栅线,它们在测量方向(x)上等距地设置。
7.如权利要求1所述的位置测量装置,其特征在于,所述至少一个反射元件(26.1,26.2;126.1,126.2)由平面镜反射器构成。
8.如权利要求7所述的位置测量装置,其特征在于,所述平面镜反射器平行于测量体(10;110)设置在扫描单元(20;120)里面。
9.如权利要求7所述的位置测量装置,其特征在于,所述扫描单元包括一个透明的支架衬底(40;50),在其面对测量体的侧面上设置第一和第二光栅结构(44.1,44.2;54.1,54.2)并且使平面镜反射器(46.1,56.1)或者
-设置在支架衬底(40)的与面对测量体的侧面相反的侧面上,其中平面镜反射器(46.1)的反射面向着测量体的方向定向或者
-设置在支架衬底(50)的相同侧面上,其中平面镜反射器(56.1)的反射面背对测量体。
10.如权利要求1所述的位置测量装置,其特征在于,构造所述第一和第二光栅结构(24.1,24.2;24.3,24.4;124.1,124.2;124.3,124.4),使得一个第一次在测量体(10;110)上产生的准直的分光束在第二次在测量体(10;110)上到达后准直地在向着扫描单元(20;120)的方向上传播。
11.如权利要求1所述的位置测量装置,其特征在于,所述光栅结构(24.1,24.2;24.3,24.4;124.1,124.2;124.3,124.4)具有焦距,它们对应于光栅结构(24.1,24.2;24.3,24.4;124.1,124.2;124.3,124.4)与反射元件(26.1,26.2;126.1,126.2)之间的光学距离。
12.如权利要求2所述的位置测量装置,其特征在于,构造所述扫描单元(20),使得由一个光源(21)发射的光束
-第一次在测量体(10)上显现,测量体由反光衍射光栅构成,在那里分离成两个向后反射到扫描单元(20)的分光束,分光束对应于两个不同的衍射级,
-两个向后反射的分光束在扫描单元(20)中在向着两个反射元件(26.1,26.2)的方向上穿过两个第一光栅结构(24.1,24.2)并且在此获得与入射方向反平行取向的偏转作用以及只垂直于测量方向(x)的聚焦作用,
-这样偏转及聚焦的分光束到达反射元件(26.1,26.2)并在向着测量体(10)的方向上向后反射,
-两个向后反射的分光束在向着测量体(10)的方向上穿过两个第二光栅结构(24.3,24.4)并且在此进行在测量方向(x)上的偏转作用以及只垂直于测量方向(x)的准直作用,
-两个分光束再在测量体(10)上显现,在那里使分光束在向着扫描单元(20)的方向上产生新的衍射和向后反射。
13.如权利要求2所述的位置测量装置,其特征在于,构造所述扫描单元(120),使得由光源(121)发射的光束
-第一次在测量体(10)上显现,该测量体由反光衍射光栅构成,在那里分离成两个向后反射到扫描单元(120)的分光束,它们对应于两个不同的衍射级,
-两个向后反射的分光束在扫描单元中在向着两个反射元件(126.1,126.2)的方向上穿过两个第一光栅结构(124.1,124.2)并且在此获得与入射方向反平行取向的偏转作用以及不仅在测量方向(x)上而且垂直于测量方向(x)的聚焦作用,
-然后使这种偏转且聚焦的分光束到达反射元件(126.1,126.2)并且在向着测量体(110)的方向上向后反射,
-然后使两个向后反射的分光束在向着测量体(11)的方向上穿过两个第二光栅结构(124.3,124.4)并且在此获得在测量方向上的偏转作用以及不仅在测量方向(x)而且垂直于测量方向(x)的准直作用,
-然后再使两个分光束到达测量体(110)上,在那里实现分光束在向着扫描单元(120)方向上的重新衍射和向后反射。
14.如权利要求12所述的位置测量装置,其特征在于,在第二次由测量体(10;110)垂直地向着扫描单元(20;120)的方向向后反射以后使向后反射的分光束叠加地在分离光栅(32;132)上显现,在那里实现在多个空间方向上的分离并且在不同空间方向上分离的分光束在光电检测装置的多个检测器(29.1,29.2,29.3;129.1,129.2,129.3)上显现,在那里在扫描单元(20;120)与测量体(10;110)相对运动的情况下分别实现根据位移进行调制的扫描信号。
15.如权利要求13所述的位置测量装置,其特征在于,在第二次由测量体(10;110)垂直地向着扫描单元(20;120)的方向向后反射以后使向后反射的分光束叠加地在分离光栅(32;132)上显现,在那里实现在多个空间方向上的分离并且在不同空间方向上分离的分光束在光电检测装置的多个检测器(29.1,29.2,29.3;129.1,129.2,129.3)上显现,在那里在扫描单元(20;120)与测量体(10;110)相对运动的情况下分别实现根据位移进行调制的扫描信号。
16.如权利要求14所述的位置测量装置,其特征在于,或者在反射元件(26.1,26.2;126.1,126.2)与第二光栅结构(24.3,24.4;124.3,124.4)之间或者在第二光栅结构(24.3,24.4;124.3,124.4)与测量体(10;110)之间在光程中设置光学极化的元件(31.1,31.2;131.1,131.2),分光束在反射元件(26.1,26.2;126.1,126.2)上向后反射以后通过光学极化元件并且使线性极化的分光束转化成圆极化的分光束。
17.如权利要求12所述的位置测量装置,其特征在于,
-或者两个第一和两个第二光栅结构(24.1,24.2,24.3,24.4;124.1,124.2;124.3,124.4)的平均光栅常数选择得与测量体(10;110)的光栅常数略微不同或者
-两个第一和两个第二光栅结构(24.1,24.2,24.3,24.4;124.1,124.2;124.3,124.4)的光栅线条以偏离0°的角度相对于测量体(10;110)的光栅线条设置。
18.如权利要求13所述的位置测量装置,其特征在于,
-或者两个第一和两个第二光栅结构(24.1,24.2,24.3,24.4;124.1,124.2;124.3,124.4)的平均光栅常数选择得与测量体(10;110)的光栅常数略微不同或者
-两个第一和两个第二光栅结构(24.1,24.2,24.3,24.4;124.1,124.2;124.3,124.4)的光栅线条以偏离0°的角度相对于测量体(10;110)的光栅线条设置。
19.如权利要求12所述的位置测量装置,其特征在于,在光程中具有光学有效的窗口部位(28.3),由光源(21)发出的光束在第一次在测量体(110)上显现之前穿过该窗口部位,其中在光学有效的窗口部位(28.3)中设置偏转光栅,其光栅线条平行于测量方向(x)延伸。
20.如权利要求13所述的位置测量装置,其特征在于,在光程中具有光学有效的窗口部位(28.3),由光源(21)发出的光束在第一次在测量体(110)上显现之前穿过该窗口部位,其中在光学有效的窗口部位(28.3)中设置偏转光栅,其光栅线条平行于测量方向(x)延伸。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102005029917A DE102005029917A1 (de) | 2005-06-28 | 2005-06-28 | Positionsmesseinrichtung |
| DE102005029917.2 | 2005-06-28 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1892173A CN1892173A (zh) | 2007-01-10 |
| CN100554868C true CN100554868C (zh) | 2009-10-28 |
Family
ID=37110275
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB2006100996840A Active CN100554868C (zh) | 2005-06-28 | 2006-06-28 | 位置测量装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7471397B2 (zh) |
| EP (1) | EP1739395B1 (zh) |
| JP (1) | JP5005969B2 (zh) |
| CN (1) | CN100554868C (zh) |
| DE (1) | DE102005029917A1 (zh) |
| ES (1) | ES2610804T3 (zh) |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7641856B2 (en) * | 2004-05-14 | 2010-01-05 | Honeywell International Inc. | Portable sample analyzer with removable cartridge |
| DE102005029917A1 (de) * | 2005-06-28 | 2007-01-04 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung |
| DE102006042743A1 (de) | 2006-09-12 | 2008-03-27 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung |
| DE102007023300A1 (de) | 2007-05-16 | 2008-11-20 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung und Anordnung derselben |
| DE102008008873A1 (de) * | 2007-05-16 | 2008-11-20 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung |
| DE102008007319A1 (de) | 2008-02-02 | 2009-08-06 | Dr. Johannes Heidenhain Gmbh | Optische Positionsmesseinrichtung |
| US7864336B2 (en) * | 2008-04-28 | 2011-01-04 | Agilent Technologies, Inc. | Compact Littrow encoder |
| KR20110086025A (ko) * | 2008-10-23 | 2011-07-27 | 가부시키가이샤 니콘 | 인코더 |
| EP2553401B1 (en) | 2010-03-30 | 2015-09-02 | Zygo Corporation | Interferometric encoder systems |
| DE102010029211A1 (de) | 2010-05-21 | 2011-11-24 | Dr. Johannes Heidenhain Gmbh | Optische Positionsmesseinrichtung |
| NL2006743A (en) * | 2010-06-09 | 2011-12-12 | Asml Netherlands Bv | Position sensor and lithographic apparatus. |
| DE102011081879A1 (de) * | 2010-11-03 | 2012-05-03 | Dr. Johannes Heidenhain Gmbh | Optische Winkelmesseinrichtung |
| DE102010043469A1 (de) * | 2010-11-05 | 2012-05-10 | Dr. Johannes Heidenhain Gmbh | Optische Positionsmesseinrichtung |
| DE102011082156A1 (de) * | 2010-12-16 | 2012-06-21 | Dr. Johannes Heidenhain Gmbh | Optische Positionsmesseinrichtung |
| WO2012106246A2 (en) | 2011-02-01 | 2012-08-09 | Zygo Corporation | Interferometric heterodyne optical encoder system |
| DE102011005937B4 (de) * | 2011-03-23 | 2020-10-22 | Dr. Johannes Heidenhain Gmbh | Vorrichtung zur interferentiellen Abstandsmessung |
| DE102011076178B4 (de) | 2011-05-20 | 2022-03-31 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung |
| WO2013036498A1 (en) * | 2011-09-06 | 2013-03-14 | Nikon Corporation | High contrast encoder head |
| JP5890531B2 (ja) * | 2011-11-09 | 2016-03-22 | ザイゴ コーポレーションZygo Corporation | 干渉方式エンコーダシステムのための小型エンコーダヘッド |
| CN104040296B (zh) | 2011-11-09 | 2016-08-24 | 齐戈股份有限公司 | 双通干涉测量编码器系统 |
| DE102012204572A1 (de) * | 2012-03-22 | 2013-09-26 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung und Anordnung mit einer derartigen Positionsmesseinrichtung |
| TWI516746B (zh) | 2012-04-20 | 2016-01-11 | 賽格股份有限公司 | 在干涉編碼系統中執行非諧循環錯誤補償的方法、裝置及計算機程式產品,以及微影系統 |
| DE102012210309A1 (de) * | 2012-06-19 | 2013-12-19 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung |
| DE102013222383A1 (de) * | 2013-02-06 | 2014-08-07 | Dr. Johannes Heidenhain Gmbh | Optische Positionsmesseinrichtung |
| DE102013211758A1 (de) * | 2013-06-21 | 2014-12-24 | Dr. Johannes Heidenhain Gmbh | Interferometer |
| DE102013220190B4 (de) * | 2013-10-07 | 2021-08-12 | Dr. Johannes Heidenhain Gmbh | Messteilung und lichtelektrische Positionsmesseinrichtung mit dieser Messteilung |
| TWI627379B (zh) * | 2013-10-07 | 2018-06-21 | 德商強那斯海登翰博士有限公司 | 光學位置測量裝置 |
| JP6593868B2 (ja) * | 2015-07-28 | 2019-10-23 | 株式会社ミツトヨ | 変位検出装置 |
| CN106813578B (zh) * | 2015-11-30 | 2019-02-22 | 上海微电子装备(集团)股份有限公司 | 一种二维光栅测量系统 |
| DE102016200847A1 (de) * | 2016-01-21 | 2017-07-27 | Dr. Johannes Heidenhain Gesellschaft Mit Beschränkter Haftung | Optische Positionsmesseinrichtung |
| JP2018066629A (ja) * | 2016-10-19 | 2018-04-26 | 太陽誘電株式会社 | ロードセル |
| US10648838B2 (en) | 2017-06-29 | 2020-05-12 | Mitutoyo Corporation | Contamination and defect resistant rotary optical encoder configuration including a rotary scale with yawed scale grating bars and structured illumination generating arrangement with a beam deflector configuration |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1989005964A1 (en) * | 1987-12-15 | 1989-06-29 | Renishaw Plc | Opto-electronic scale-reading apparatus |
| DE3905730C2 (de) | 1989-02-24 | 1995-06-14 | Heidenhain Gmbh Dr Johannes | Positionsmeßeinrichtung |
| US5079418A (en) | 1990-02-20 | 1992-01-07 | Dr. Johannes Heidenhain Gmbh | Position measuring apparatus with reflection |
| JP3478567B2 (ja) * | 1992-09-25 | 2003-12-15 | キヤノン株式会社 | 回転情報検出装置 |
| JP3028716B2 (ja) * | 1993-09-29 | 2000-04-04 | キヤノン株式会社 | 光学式変位センサ |
| JP3530573B2 (ja) * | 1994-04-27 | 2004-05-24 | キヤノン株式会社 | 光学式変位センサ |
| DE19748802B4 (de) * | 1996-11-20 | 2010-09-09 | Dr. Johannes Heidenhain Gmbh | Optische Positionsmeßeinrichtung |
| JP4677169B2 (ja) * | 2000-09-14 | 2011-04-27 | ドクトル・ヨハネス・ハイデンハイン・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツング | 位置測定装置 |
| US20030174343A1 (en) * | 2002-03-18 | 2003-09-18 | Mitutoyo Corporation | Optical displacement sensing device with reduced sensitivity to misalignment |
| CN1253699C (zh) | 2002-03-18 | 2006-04-26 | 株式会社三丰 | 对偏移具有低灵敏度的光学位移传感装置 |
| JP4722474B2 (ja) * | 2004-12-24 | 2011-07-13 | 株式会社ミツトヨ | 変位検出装置 |
| DE102005029917A1 (de) * | 2005-06-28 | 2007-01-04 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung |
| US7858922B2 (en) * | 2006-11-20 | 2010-12-28 | Dr. Johannes Heidenhain Gmbh | Position-measuring device |
-
2005
- 2005-06-28 DE DE102005029917A patent/DE102005029917A1/de not_active Withdrawn
-
2006
- 2006-06-13 ES ES06012138.1T patent/ES2610804T3/es active Active
- 2006-06-13 EP EP06012138.1A patent/EP1739395B1/de active Active
- 2006-06-27 JP JP2006176321A patent/JP5005969B2/ja active Active
- 2006-06-28 CN CNB2006100996840A patent/CN100554868C/zh active Active
- 2006-06-28 US US11/478,168 patent/US7471397B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP5005969B2 (ja) | 2012-08-22 |
| EP1739395A2 (de) | 2007-01-03 |
| US20070013920A1 (en) | 2007-01-18 |
| JP2007010659A (ja) | 2007-01-18 |
| DE102005029917A1 (de) | 2007-01-04 |
| US7471397B2 (en) | 2008-12-30 |
| ES2610804T3 (es) | 2017-05-03 |
| CN1892173A (zh) | 2007-01-10 |
| EP1739395A3 (de) | 2015-03-25 |
| EP1739395B1 (de) | 2016-12-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100554868C (zh) | 位置测量装置 | |
| CN101144730B (zh) | 位置测量装置 | |
| US7907286B2 (en) | Optical position-measuring device | |
| JP5710105B2 (ja) | 光学式位置測定装置 | |
| US7193204B2 (en) | Multi-track optical encoder employing beam divider | |
| CN101067560B (zh) | 位置测量装置 | |
| CN100535767C (zh) | 一种调焦调平测量方法和装置 | |
| US9766098B2 (en) | Optical position measuring instrument | |
| CN100541115C (zh) | 外观检查装置和方法 | |
| JP2021510814A (ja) | レーザレーダ及びその作動方法 | |
| US7480060B2 (en) | Interferometric optical position encoder employing spatial filtering of diffraction orders for improved accuracy | |
| JP2003279385A (ja) | 光学式変位検出装置および方法 | |
| EP3124924B2 (en) | Displacement detecting device | |
| JP6095911B2 (ja) | レーザ変位計測装置 | |
| JPH0130089B2 (zh) | ||
| US9068811B2 (en) | Device for determining distance interferometrically | |
| CN101308013B (zh) | 位置测量装置 | |
| US8222594B2 (en) | Encoder that optically detects positional information of a movable body by changing a path length through periodic oscillation of an optical element | |
| JP2002243503A (ja) | 光学式エンコーダ | |
| AU2001298040B2 (en) | Optical telemeter | |
| JP2004271508A (ja) | エンコーダアセンブリ | |
| SU1307230A1 (ru) | Оптико-электронное устройство дл контрол положени объекта | |
| JP2015081794A (ja) | 光電式エンコーダ | |
| KR20200139564A (ko) | 소형 라인 레이저 장치 | |
| JP3222295B2 (ja) | 光学式変位センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant |