CN100410536C - 建筑机械的控制设备和计算输入力矩的方法 - Google Patents
建筑机械的控制设备和计算输入力矩的方法 Download PDFInfo
- Publication number
- CN100410536C CN100410536C CNB028296710A CN02829671A CN100410536C CN 100410536 C CN100410536 C CN 100410536C CN B028296710 A CNB028296710 A CN B028296710A CN 02829671 A CN02829671 A CN 02829671A CN 100410536 C CN100410536 C CN 100410536C
- Authority
- CN
- China
- Prior art keywords
- input torque
- control
- speed
- deviation
- rotating speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 12
- 238000010276 construction Methods 0.000 title 1
- 238000004364 calculation method Methods 0.000 claims description 14
- 238000006073 displacement reaction Methods 0.000 claims description 7
- 230000001276 controlling effect Effects 0.000 claims description 5
- 238000001514 detection method Methods 0.000 claims description 5
- 238000007599 discharging Methods 0.000 claims description 4
- 230000001105 regulatory effect Effects 0.000 claims description 3
- 230000009467 reduction Effects 0.000 claims description 2
- 239000002912 waste gas Substances 0.000 description 10
- 230000001915 proofreading effect Effects 0.000 description 9
- 239000000446 fuel Substances 0.000 description 8
- 230000000295 complement effect Effects 0.000 description 7
- 230000004044 response Effects 0.000 description 7
- 230000001133 acceleration Effects 0.000 description 6
- 230000008569 process Effects 0.000 description 5
- 239000000779 smoke Substances 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000007935 neutral effect Effects 0.000 description 3
- 239000000523 sample Substances 0.000 description 3
- 230000000994 depressogenic effect Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 239000000725 suspension Substances 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000009194 climbing Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
Images




Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/20—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00 by changing the driving speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2232—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps
- E02F9/2235—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps including an electronic controller
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/06—Control using electricity
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/38—Control of exclusively fluid gearing
- F16H61/40—Control of exclusively fluid gearing hydrostatic
- F16H61/46—Automatic regulation in accordance with output requirements
- F16H61/472—Automatic regulation in accordance with output requirements for achieving a target output torque
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Transportation (AREA)
- Fluid Mechanics (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Operation Control Of Excavators (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Control Of Positive-Displacement Pumps (AREA)
Abstract
本发明涉及一种用于建筑机械的控制设备,其中所述建筑机械包括:由原动机(20)驱动的变排量液压泵(10);由液压泵(10)排出的压力油驱动的液压致动器(5);以及用于检测原动机(20)的实际转速(Nr)的装置(31)。该用于建筑机械的控制设备包括:用于根据操作装置(14a)的控制输入控制原动机(20)的转速的装置(40B);以及用于根据由转速检测装置(31)检测的实际转速(Nr)与由于操作装置(14a)的操作所得的控制转速(Nθ)之间的偏差(ΔN)来控制液压泵(10)的输入力矩(T2)的装置(40A)。当控制转速(Nθ)大于实际转速(Nr)且偏差(ΔN)不小于特定值(N2)时,输入力矩控制装置(40A)执行控制,以降低输入力矩(T2)。
Description
技术领域
本发明涉及建筑机械的控制设备和计算输入力矩的方法,该控制设备控制影响建筑机械原动机的输入力矩。
背景技术
在相关技术领域中已知的建筑机械包括例如日本专利No.2633095所公开的一种建筑机械,该建筑机械具有行走液压马达,由变排量液压泵排放的油驱动,该变排量液压泵由发动机驱动,并可以控制发动机转速,以响应行走踏板的操作,以及允许车辆根据行走踏板的操作,通过控制供给液压马达的压力油量行驶。
在上述文献所公开的建筑机械中,输入力矩是基于下述速度传感控制进行控制的。就是说,避免发动机停转的目标力矩是基于由转速传感器检测的实际发动机转速与对应于原动机调速器杠杆位置的目标转速之间的偏差计算,然后,基于目标力矩计算目标泵倾转角,以控制泵倾转角。在计算目标力矩时,只为增大输入力矩而不是降低输入力矩而执行该操作。这样,使液压泵的倾转角保持大于或等于预定值,结果,可以保证平稳加速。
近年来,已经应用为处理废气设计的发动机,以便抑制黑烟的产生。在为处理废气设计的发动机中,将满载性能曲线设置成使在低速范围的发动机输出力矩小于传统发动机的值。更特别地,发动机的最大输出力矩转换到高速范围,并且该力矩从低速范围逐渐增大到中速范围,而力矩从中速范围到高速范围是急剧增大的。结果,在低速范围的燃料消耗可以降低,以便抑制黑烟的产生。
如果对处理废气的这种发动机按照上述文献所述那样控制输入力矩,则会发生下述问题。就是说,由于在根据上述文献的建筑机械中没有控制输入力矩使之降低,当车辆起动行驶或者爬坡以及行驶负荷变大时,输入力矩可能超过发动机的输出力矩,这就可能发生发动机停转。
发明内容
本发明的目的在于提供一种适合用于为处理废气而设计的发动机的建筑机械的控制设备以及计算输入力矩的方法。
本发明适用于这样的建筑机械,该建筑机械具有:变排量液压泵,由原动机驱动;液压致动器,由液压泵排出的压力油驱动;以及转速检测装置,用于检测原动机的实际转速。这种建筑机械的控制设备包括:原动机控制装置,用于根据操作装置被操作的程度而控制原动机的转速;以及输入力矩控制装置,用于基于转速检测装置所检测的实际转速与经过操作装置的操作所设定的控制转速之间的偏差来调节液压泵的输入力矩,如果控制转速大于实际转速,且它们之间的偏差大于或等于预定值,则执行控制以降低输入力矩。
此外,建筑机械的控制设备包括:原动机控制装置,用于根据操作装置被操作的程度控制原动机的转速;以及输入力矩控制装置,用于基于转速检测装置所检测的实际转速与经过操作装置的操作所设定的控制转速之间的偏差来调节液压泵的输入力矩,如果控制转速大于实际转速,且它们之间的偏差大于或等于预定值,就执行控制以降低输入力矩一个量,这个量大于在偏差低于预定值时所设定的量。
照这样的方式,可以避免发动机停转,并可以获得极佳的加速,由此该控制设备适用于为处理废气而设计的发动机。
如果控制转速大于实际转速,且它们之间的偏差低于预定值,则优选的是将输入力矩的调节量设定为零。如果控制转速大于实际转速,且它们之间的偏差大于或等于预定值,则可将输入力矩的变化率设置成大于在控制转速低于实际转速时所设定的输入力矩的变化率。
液压致动器可以是行驶用的液压马达,操作装置可以是行走踏板。在非行驶过程中的输入力矩可以降低一个量,这个量大于行驶过程中设定的量。
本发明最适合用于轮式液压挖掘机。
输入力矩可以通过根据原动机的控制转速与实际转速之间的偏差来计算标准力矩而进行计算,如果控制转速大于实际转速,且它们之间的偏差小于或等于预定值,则将修正力矩设置为零;而如果偏差大于预定值,则修正力矩设置为负值,并在标准力矩上加上修正力矩。
附图说明
图1为采用本发明的轮式液压挖掘机的一个实施例的外视图;
图2为在本发明一个实施例中实现的控制设备的液压回路的回路图;
图3为变排量液压泵的P-qp曲线图;
图4示出了在本发明的一个实施例中所使用发动机的满载性能曲线;
图5为根据本发明一个实施例的控制设备的框图;
图6详细地示出了输入力矩的控制回路;
图7详细地示出了发动机转速的控制回路;
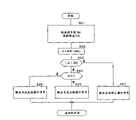
图8表示发动机转速的控制程序的流程图;以及
图9表示示出了由根据本发明一个实施例的控制设备所实现的操作特征函数的曲线图。
具体实施方式
参考图1至9说明通过在轮式液压挖掘机中使用根据本发明的建筑机械控制装置所实现的实施例。
如图1所示,轮式液压挖掘机包括:底架1和可转动地安装在底架1顶上的上部转动结构2。操作者的驾驶室3和前置工作附件4被设置在上部转动结构2上,该前置工作附件4由吊杆4a、臂4b和铲斗4c构成。吊杆4a在吊杆缸4d被驱动时被提升/降低;当臂缸4e被驱动时,臂4b被提升/降低;当铲斗缸4f被驱动时,铲斗4c进行挖掘/倾倒操作。由液压驱动的行走液压马达5安装在底架1上,借助驱动轴和车轴将行驶马达5的旋转传输到车轮6(轮胎)。
图2示出了行驶和工作的液压回路。变排量液压泵10借助控制阀11与液压马达5连接,并与液压缸连接,例如,借助控制阀12与吊杆缸4d连接。控制阀11的操纵端口借助向前/向后切换阀13与伺服阀14连接,而控制阀12的操纵端口与伺服阀15连接。
通过图中未示出的开关的操作切换向前/向后切换阀13,根据行走踏板14a被压下的操作程度操纵伺服阀14。当向前/向后切换阀13通过开关操作设置在向前位置或向后位置,然后操纵行走踏板14a,将源自液压源16的先导压力施加在控制阀11。作为响应,当操作控制阀11时,将来自液压泵10的压力油供入液压马达5,然后旋转液压马达,以允许车辆向前行驶或向后行驶。
另一方面,根据操纵杠杆15a被操作的程度操纵伺服阀15。当对操纵杠杆15a进行操作时,将来自液压源17的先导压力施加在控制阀12上。当操作控制阀12时,将来自液压泵10的压力油供入吊杆缸4d,以进行工作操作,例如用正被驱动的吊杆缸4d进行挖掘。
液压泵10由发动机20驱动,泵倾转角qp由调节器30改变。从泵排出的油压反作用到调节器30以执行马力控制。马力控制是所谓的P-qp(与泵倾转角对应的压力)控制,如图3所示。此外,泵倾转量pq也根据输入力矩控制,该输入力矩通过速度传感控制进行计算,对此将在本实施例的后面详细说明。相应地,输入力矩由图3所示箭头所标明地增大或减小。
在本实施例中,使用为处理废气而设计的发动机以抑制黑烟的产生。图4示出了发动机满载性能特征曲线,处理废气的发动机的特性曲线用实线表示,其它类型发动机的特性曲线用虚线表示。将处理废气的发动机设计成使其在低速范围内的输出力矩T较小,如图4所示。更特别地,最大输出力矩转移到高速范围,且将力矩设定成从低速范围到中速范围逐渐增加,但从中速范围到高速范围急剧增加。通过使用具有这种特性的原动机可以降低在低速范围内的燃料消耗,并且可以减少黑烟的产生。
图5为根据本实施例的控制设备的框图。发动机20的调速器杠杆21借助连杆机构22与脉冲马达23连接,发动机转速由脉冲马达23的旋转调节。就是说,当脉冲马达23正转时,发动机转速增加,而随着脉冲马达23反转,发动机转速降低。脉冲马达23的旋转由来自控制器40的控制信号控制,对此将在后面说明。电位计24借助连杆机构22与调速器杠杆21连接,对应于发动机20的转速的调速器杠杆角度(由电位计24检测)作为发动机控制转速Nθ被输入到控制器40。
与控制器40连接的还包括:转速传感器31,其检测发动机20的实际转速Nr;制动开关32;位置传感器33,其检测向前/向后切换阀13所切换的位置;检测器35,其检测操作构件、即指示发动机转速的燃料杠杆34被操作的程度X;压力传感器36,其检测代表行走踏板14a被压下的操作程度的先导压力Pt。
当制动开关32被切换到行驶位置、工作位置或停车位置时,从制动开关32输出工作信号或者行驶信号。当将制动开关32切换到行驶位置时,取消停车制动,通过制动踏板使运行制动操作能够进行。当将制动开关32切换到工作位置时,进行停车制动和运行制动。当将制动开关切换到停车位置时,进行停车制动。当将制动开关32切换到行驶位置时,输出接通信号;而当将制动开关切换到工作位置或停车位置时,输出断开信号。
控制器40包括:力矩控制单元40A,其控制输入力矩;以及转速控制单元40B,其控制发动机转速。图6为详细地示出力矩控制单元40A的概念图。
力矩控制单元40A包括:偏差计算单元41,其计算实际转速Nr与控制转速Nθ之间的偏差ΔN;标准力矩计算单元42和43,其分别计算标准力矩TB1和TB2;校正力矩计算单元44和45,其分别计算校正力矩ΔT1和ΔT2;系数计算单元46和47,其每一个计算一个系数;乘法单元48和49,其分别用系数乘以校正力矩ΔT1和ΔT2;加法单元50和51,其通过分别将进行乘法校正后的力矩ΔT1和ΔT2加入标准力矩T1和T2来计算目标输入力矩T1和T2;选择单元52,其选择目标输入力矩T1和T2其中之一;转换单元53,其输出控制信号i以调节输入力矩至所选择的目标输入力矩T1或T2。
将适合于工作的每一个特征函数均预先设置在标准力矩计算单元42、校正力矩计算单元44和系数计算单元46中;而将适合于行驶的每一个特征函数均预先设置在标准力矩计算单元43、校正力矩计算单元45和系数计算单元47中。
现在详细说明在力矩控制单元40A中执行的算法操作。
偏差计算单元41计算由转速传感器31检测到的发动机实际转速Nr与由电位计24检测到的控制转速Nθ之间的偏差ΔN(=Nr-Nθ),这样计算出的偏差ΔN被输入校正力矩计算单元44和45。偏差ΔN与校正力矩ΔT1和ΔT2中每一个之间的关系在校正力矩计算单元44和45处被预先分别存储在图中所示的存储器中,基于这些关系的特征函数分别计算与校正力矩ΔT1和ΔT2相匹配的偏差ΔN。
当偏差ΔN为正且校正力矩ΔT1随偏差ΔN的增加成比例增加时,在校正力矩计算单元44中设定的特征函数指示校正力矩ΔT1具有正值。当偏差ΔN为负且校正力矩ΔT1随偏差ΔN的减小成比例减小(或者|ΔT1|增加)时,将校正力矩ΔT1设定为负值。偏差ΔN为正值时的特征函数的斜度与偏差ΔN为负值时的特征函数的斜度相等。
另一方面,当偏差ΔN为正且校正力矩ΔT2随偏差ΔN增大而成比例增大时,设定在校正力矩计算单元45中的特征函数指示校正力矩ΔT2具有正值。与此相反,当偏差ΔN为负值且在0与预定值N2之间的范围内时,校正力矩ΔT2为0;如果偏差ΔN小于预定值N2,校正力矩ΔT2随偏差ΔN的减小而成比例减小。比预定值N2更小的偏差ΔN的特征函数的斜度比在偏差ΔN为正时的特征函数的斜度更大。
如图所示,控制转速Nθ与每一个标准力矩TB1和TB2之间的关系在标准力矩计算单元42和43处被预先分别存储在存储器中,基于这些关系的特征函数分别计算与控制转速Nθ相匹配的标准力矩TB1和Tb2。系数增加正比于控制转速Nθ的特征函数在如图所示的系数计算单元46和47处被预先存储在存储器中,并且基于这些特征函数计算与控制转速Nθ相匹配的系数。乘法单元48和49将在校正力矩计算单元44和45处计算的校正力矩ΔT1和ΔT2分别乘以在系数计算单元46和47计算的系数。
加法单元50和51通过将校正力矩ΔT分别加入标准力矩TB1和TB2来计算目标力矩T1和T2,该校正力矩是在乘法单元48和49中经乘法运算求得,而标准力矩是在标准力矩计算单元42和43中计算出的。
选择单元52基于制动开关32、位置传感器33和压力传感器36提供的信号做出车辆是否正在行驶的判定。如果制动开关32已经关闭,将向前/向后切换阀13设置在除中间位置之外的位置,且先导压力Pt大于预定值,则判定车辆正在行驶;否则,判定车辆没有行驶。如果车辆正在行驶,选择目标输入力矩T2,当车辆没有行驶(例如进行工作操作)时,选择目标输入力矩T1。
转换单元53计算对应于所选择的目标输入力矩T1或T2的控制信号i。用于调节倾转角的缸和用于控制压力油流向缸的电磁阀被安装在图中未示出的泵调节器30上,从转换单元53输出的控制信号i被发送到该电磁阀。作为响应,泵倾转角qp改变,以便将输入力矩调节到目标输入力矩T1或T2。
图7是详细示出了转速控制单元40B的概念图。如图所示,由检测器35提供的检测值X与目标转速Nx之间的关系在目标转速计算单元61处被预先存储在存储器中,基于关系特征函数计算对应于燃料杠杆34被操作的程度的目标转速Nx。如图所示,由压力传感器提供的检测值Pt与目标转速Nt之间的关系在目标转速计算单元62处被预先存储在存储器中,基于关系特征函数计算与行走踏板14a被操作的程度相匹配的目标转速Nt。
存储在目标转速计算单元61和62中的这些特征函数各指示在目标转速Nx和Nt中从空转速度Ni随操作程度的增加而呈线性增长。在目标转速计算单元61中设置的最大目标转速Nxmax被设置成比发动机20的最大速度小,而在目标转速计算单元62中设置的最大目标转速Ntmax被设置成基本上等于发动机20的最大速度。因此,最大目标转速Ntmax大于最大目标转速Nxmax。
选择单元63在目标转速计算单元61和62中计算的目标转速Nx和Nt之间选择较大值。伺服控制单元57将所选择的转速(转速命令值Nin)与控制转速Nθ进行比较,该控制转速对应于由电位计24所检测到的调速器杠杆21的倾转量。然后,通过图8所示程序控制脉冲马达23,以便使两值相匹配。
首先,在进入图8中步骤S22之前,在步骤S21中分别读取转速命令值Nin和控制转速Nθ。然后,在步骤S22中,将Nθ减Nin的结果作为转速差A存储在存储器中,在步骤S23中,对转速差A和预定的参考转速差k做出其是否满足|A|≥k的判定。如果做出肯定的判定,操作程序进到步骤S24,以判定转速差是否大于0。如果A>0,则控制转速Nθ大于转速命令值Nin,即,控制转速高于目标转速,相应地,在步骤S25中,将构成马达反转命令的信号输出到脉冲马达23,以便降低发动机的转速。作为响应,脉冲马达23反转,从而降低发动机的转速。
相反,如果A≤0,则控制转速Nθ低于转速命令值Nin,即,控制转速低于目标转速,相应地,将构成马达正转命令的信号在步骤S26中输出,以便提高发动机的转速。作为响应,脉冲马达23正转,由此提高发动机的转速。如果在步骤S23做出否定的判定,操作进行到步骤S27以输出马达停止的信号,结果,使发动机转速保持恒定的水平。一旦在步骤S25至S27其中之一的步骤得到执行,程序运行返回起始点。
下面对表征在本实施例中实现的液压控制系统的操作进行说明。
当车辆准备行驶时,将制动开关32设置在行驶位置,且向前/向后切换阀13被切换到向前或向后位置。当将燃料杠杆34设置在空转位置并且在这种状态下行走踏板14a被下压至最大程度时,液压泵10排出的压力油使行驶马达旋转,以便允许车辆开始行驶。选择单元63选择目标转速Nt作为转速命令值Nin,因为此时通过行走踏板14a设置的目标转速Nt大于通过燃料杠杆34设定的目标转速Nx,通过图8所示程序控制调速器杠杆的位置,以便使实际转速与转速命令值Nin相匹配。作为响应,调速器杠杆21的位置做大量改变,并且控制转速Nθ增大,如图9(a)中虚线所示。
当控制转速Nθ增大时,实际发动机转速Nr也增大,但是,在直到实际发动机转速Nr达到控制转速Nθ之前,存在时间延迟,导致在这段期间偏差ΔN成为负值。这种情况下,基于图4所示特征函数的特征函数,发动机输出力矩T如图9(b)所示变化。
在车辆行驶过程中,选择单元52选择目标输入力矩T2。相应地,力矩控制单元40A基于在校正力矩计算单元45中设定的特征函数执行速度传感控制。由于就在行走踏板14a操作开始之后偏差|ΔN|大于预定值N2,在校正力矩计算单元45计算的校正力矩ΔT2显示负值。照这样,如图9(b)所示,当车辆开始准备行驶时,输入力矩T2设定为小于输出力矩T,以避免发动机停转。
当偏差|ΔN|减小以响应实际发动机转速Nr时,负的校正力矩ΔT2减小,然后,当偏差|ΔN|变成等于预定值N2或者更小时,将校正力矩ΔT2设置为0。在偏差|ΔN|到达0之前,如上所述,通过设置校正力矩ΔT为0,可以迅速使输入力矩T2返回对应于标准力矩TB2的值,以使实现极好的加速。需要指出,如图9(b)所示,即使在输入力矩T2增大的过程中,输入力矩T2短时间内超过输出力矩T,输出力矩与输入力矩之间的差(T-T2)也足够小,因而从实际考虑不致产生任何问题。上述实施例可以有效地为具有大负载的车辆采用,因此,同样不仅适用于起动以行驶的车辆,还适合于爬坡车辆。
在图9(b)中所示的特征函数T20示出了输入力矩的传统特征,由这种特征,校正力矩ΔT在偏差ΔN为负值的情况下始终保持为0。根据这种特征,当偏差ΔN为负值时,输入力矩T20不会变得小于标准力矩。照这样,当车辆准备行驶时,安装有可处理废气且具有较小输出力矩的发动机的车辆,发动机输入力矩T20超过输出力矩T,结果,可能发生发动机停转。
为使车辆进入工作,将制动开关32设置在工作位置,而向前/向后切换阀13设置在中间位置。如果在这种情况下将燃料杠杆34操作到某种程度而不是操纵行走踏板14a,转速控制单元40B的选择单元63选择通过燃料杠杆34设置的目标转速Nx作为转速命令值Nin,控制调速器杠杆的位置,以使实际转速与控制速度命令值Nin相匹配。此时,力矩控制单元40A的选择单元52选择目标输入力矩T1,力矩控制单元40A基于在校正力矩计算单元44设定的特征执行速度传感控制。如图9(c)所示,输入力矩T1总是小于输出力矩T,因为对应于负偏差ΔN的校正力矩ΔT在校正力矩计算单元44处计算为负值。
根据本实施例,可以实现以下优点。
(1)如果实际原动机转速Nr与控制转速Nθ之间的偏差ΔN为负,且|ΔN|大于预定值N2,则将校正力矩ΔT2设定为负值;如果|ΔN|等于或小于预定值N2,则将校正力矩ΔT2设置为0。这样,当车辆起动准备行驶时,即使安装有可处理废气的发动机,也可以将输入力矩T2设置成小于输出力矩T,于是,可以避免发动机发生停转,并获得极好的加速。
(2)对应于具有|ΔN|大于预定值N2的负偏差ΔN的校正力矩ΔT的斜度被设置成大于对应于至少偏差ΔN为正值的校正力矩ΔT的斜度。相应地,当偏差ΔN接近预定值N2时,可以使输入力矩T2迅速返回标准力矩TB2,当偏差ΔN为正值时,可以避免发生振荡。
(3)基于在车辆处于行驶状态和非行驶状态下的校正力矩ΔT的计算的特征函数是单独进行设定的,由于在非行驶状态的加速性能并不是很重要,当偏差ΔN为负时,将校正力矩ΔT设置成负值。结果,当车辆进行工作操作时,可以使输入力矩T1保持小于或等于输出力矩T。
虽然,根据上述实施例,当偏差ΔN处于N2≤ΔN≤0的范围内时将校正力矩ΔT2设置为0,校正力矩ΔT2并非必须设置为0,只要校正力矩ΔT2的特征函数如此定义,即,对应于负偏差ΔN的校正力矩ΔT2的斜度对于预定值N2具有两个不同的水平。
虽然对保证行驶液压马达5在行驶过程中的加速性能的例子给予了说明,本发明并不局限于这个例子,例如,可以应用于使上部转动结构回转的回转液压马达。相应地,操作装置也不局限于行走踏板14a。
工业实用性
虽然对例子给予了上述说明,其中,轮式液压挖掘机作为采用本发明的建筑机械的例子,本发明也适用于其它类型的建筑机械,例如非轮式建筑机械。
Claims (8)
1. 一种建筑机械的控制设备,所述建筑机械包括:
由原动机驱动的变排量液压泵;
由从液压泵排出的压力油驱动的液压致动器;以及
用于检测原动机的实际转速的转速检测装置,
该控制设备包括:
用于根据操作装置的操作程度控制原动机的转速的原动机控制装置;以及
输入力矩控制装置,其基于由转速检测装置检测的实际转速与通过操作装置操作所设定的控制转速之间的偏差来调节液压泵的输入力矩;其特征在于:
如果控制转速大于实际转速,并且它们之间的偏差大于或等于预定值,则输入力矩控制装置执行控制以降低输入力矩。
2. 如权利要求1所述的建筑机械的控制设备,其特征在于:
如果控制转速大于实际转速,并且它们之间的偏差大于或等于预定值,则输入力矩控制装置执行控制以便以一定量降低输入力矩,所述一定量大于当偏差低于预定值时所设定的量。
3. 如权利要求1或2所述的建筑机械的控制设备,其特征在于:
如果控制转速大于实际转速,并且它们之间的偏差低于预定值,则输入力矩控制装置将输入力矩的调节量设定为零。
4. 如权利要求1或2所述的建筑机械的控制设备,其特征在于:
如果控制转速小于实际转速,则输入力矩控制装置对应于偏差的增加执行控制,以增大输入力矩;以及
如果控制转速大于实际转速,并且它们之间的偏差大于或等于预定值,则将输入力矩的变化率设置成大于在控制转速小于实际转速时所设定的输入力矩的变化率。
5. 如权利要求1或2所述的建筑机械的控制设备,其特征在于:
液压致动器是行走用的液压马达,并且操作装置为行走踏板。
6. 如权利要求5所述的建筑机械的控制设备,进一步包括:
用于检测行驶或者非行驶的行驶检测装置,其中:
如果当控制转速大于实际转速时采用行驶检测装置检测到非行驶状态,则输入力矩控制装置以一定量减小输入力矩,所述一定量大于在检测到行驶状态时所设定的量。
7. 一种轮式液压挖掘机,其包括:
由原动机驱动的变排量液压泵;
由从液压泵排出的压力油驱动的液压致动器;
用于检测原动机的实际转速的转速检测装置;以及
如权利要求1至6中任一项所述的控制设备。
8. 一种用于如权利要求1所述的建筑机械的控制设备的计算输入力矩的方法,该计算输入力矩的方法包括:
根据原动机的控制转速与实际转速之间的偏差计算标准力矩;
如果控制转速大于实际转速,并且它们之间的偏差小于或等于预定值,则将校正力矩设为零;而如果偏差大于预定值,则将校正力矩设为负值;以及
通过将校正力矩加入标准力矩来计算输入力矩。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2002/009967 WO2004029460A1 (ja) | 2002-09-26 | 2002-09-26 | 建設機械の制御装置、および入力トルク演算方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1668849A CN1668849A (zh) | 2005-09-14 |
| CN100410536C true CN100410536C (zh) | 2008-08-13 |
Family
ID=32040309
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB028296710A Expired - Fee Related CN100410536C (zh) | 2002-09-26 | 2002-09-26 | 建筑机械的控制设备和计算输入力矩的方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7513110B2 (zh) |
| EP (1) | EP1550809B1 (zh) |
| JP (1) | JP4115994B2 (zh) |
| CN (1) | CN100410536C (zh) |
| WO (1) | WO2004029460A1 (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101985840A (zh) * | 2009-07-28 | 2011-03-16 | 沃尔沃建造设备控股(瑞典)有限公司 | 用于施工机械的使用电动马达的回转控制系统和方法 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4871760B2 (ja) * | 2007-02-28 | 2012-02-08 | 日立建機株式会社 | 油圧駆動車両の原動機回転数制御装置 |
| WO2009074180A1 (en) * | 2007-12-13 | 2009-06-18 | Agilent Technologies, Inc. | Valve based or viscosity based control of a fluid pump |
| SE533307C2 (sv) * | 2008-05-29 | 2010-08-17 | Scania Cv Abp | Styrning av hydraulisk enhet |
| US8515637B2 (en) | 2010-12-23 | 2013-08-20 | Caterpillar Inc. | Machine control system and method |
| JP5395818B2 (ja) * | 2011-01-21 | 2014-01-22 | 日立建機株式会社 | 作業機械の旋回制御装置 |
| WO2013058326A1 (ja) * | 2011-10-20 | 2013-04-25 | 日立建機株式会社 | 電動式油圧作業機械の油圧駆動装置 |
| US9303633B2 (en) | 2012-09-14 | 2016-04-05 | Caterpillar Inc. | Over-speed control system and method |
| CN105026654A (zh) * | 2013-02-08 | 2015-11-04 | 沃尔沃建造设备有限公司 | 工程机械行驶控制方法 |
| DE102013005774B4 (de) * | 2013-04-05 | 2021-01-21 | Robert Bosch Gmbh | Nutzung einer von einem motor angetriebenen drehzahlvariablen hydraulikpumpe als hydrostatisches getriebe |
| CN105048929B (zh) * | 2015-08-31 | 2017-06-13 | 哈尔滨理工大学 | 带有保护装置的无线遥控式灌溉泵机调速系统及控制方法 |
| US9780090B2 (en) | 2015-10-19 | 2017-10-03 | Nxp Usa, Inc. | Integrated circuits and devices with interleaved transistor elements, and methods of their fabrication |
| JP6998145B2 (ja) * | 2017-08-02 | 2022-01-18 | 川崎重工業株式会社 | 液圧駆動装置 |
| US11371209B2 (en) | 2019-06-24 | 2022-06-28 | Deere & Company | Work vehicle with switchable propulsion control system |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6318035B2 (zh) * | 1979-07-09 | 1988-04-15 | Japan Steel Works Ltd | |
| JP2633095B2 (ja) * | 1991-02-08 | 1997-07-23 | 日立建機株式会社 | 油圧建設機械の油圧制御装置 |
| JP2000161302A (ja) * | 1998-11-24 | 2000-06-13 | Hitachi Constr Mach Co Ltd | 油圧建設機械のエンジンラグダウン防止装置 |
| JP3241062B2 (ja) * | 1991-05-22 | 2001-12-25 | 日立建機株式会社 | 作業機のポンプ流量制御装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3049938A1 (en) * | 1979-10-15 | 1982-03-18 | Y Aoyagi | Method of controlling internal combustion engine and hydraulic pump system |
| US4332531A (en) * | 1980-01-28 | 1982-06-01 | Parker-Hannifin Corporation | Variable displacement pump with torque limiting control |
| DE3780292T2 (de) * | 1986-08-15 | 1993-01-07 | Komatsu Mfg Co Ltd | Steuerungseinheit einer hydraulischen pumpe. |
| DE69004789T3 (de) * | 1989-01-18 | 1997-12-18 | Hitachi Construction Machinery | Hydraulische antriebseinheit für baumaschinen. |
| US5269391A (en) * | 1990-02-27 | 1993-12-14 | Mitsubishi Jidosha Kogyo Kabushiki Kaisha | Apparatus for controlling the output of a vehicle equipped with an internal combustion engine |
| US5307631A (en) * | 1991-01-28 | 1994-05-03 | Hitachi Construction Machinery Co., Ltd. | Hydraulic control apparatus for hydraulic construction machine |
| DE4102621A1 (de) * | 1991-01-30 | 1992-08-06 | Orenstein & Koppel Ag | Hydrostatischer antrieb fuer arbeitsmaschinen |
| JPH10131867A (ja) * | 1996-10-31 | 1998-05-19 | Tokimec Inc | 回転液圧装置制御システム |
| JPH10220359A (ja) * | 1997-01-31 | 1998-08-18 | Komatsu Ltd | 可変容量型ポンプの制御装置 |
-
2002
- 2002-09-26 WO PCT/JP2002/009967 patent/WO2004029460A1/ja active Application Filing
- 2002-09-26 CN CNB028296710A patent/CN100410536C/zh not_active Expired - Fee Related
- 2002-09-26 US US10/529,219 patent/US7513110B2/en not_active Expired - Fee Related
- 2002-09-26 JP JP2004539439A patent/JP4115994B2/ja not_active Expired - Fee Related
- 2002-09-26 EP EP02807864.0A patent/EP1550809B1/en not_active Expired - Lifetime
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6318035B2 (zh) * | 1979-07-09 | 1988-04-15 | Japan Steel Works Ltd | |
| JP2633095B2 (ja) * | 1991-02-08 | 1997-07-23 | 日立建機株式会社 | 油圧建設機械の油圧制御装置 |
| JP3241062B2 (ja) * | 1991-05-22 | 2001-12-25 | 日立建機株式会社 | 作業機のポンプ流量制御装置 |
| JP2000161302A (ja) * | 1998-11-24 | 2000-06-13 | Hitachi Constr Mach Co Ltd | 油圧建設機械のエンジンラグダウン防止装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101985840A (zh) * | 2009-07-28 | 2011-03-16 | 沃尔沃建造设备控股(瑞典)有限公司 | 用于施工机械的使用电动马达的回转控制系统和方法 |
| CN101985840B (zh) * | 2009-07-28 | 2015-10-21 | 沃尔沃建造设备控股(瑞典)有限公司 | 用于施工机械的使用电动马达的回转控制系统和方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1550809A4 (en) | 2011-04-27 |
| EP1550809B1 (en) | 2016-11-09 |
| CN1668849A (zh) | 2005-09-14 |
| JPWO2004029460A1 (ja) | 2006-01-26 |
| US7513110B2 (en) | 2009-04-07 |
| US20060056978A1 (en) | 2006-03-16 |
| EP1550809A1 (en) | 2005-07-06 |
| JP4115994B2 (ja) | 2008-07-09 |
| WO2004029460A1 (ja) | 2004-04-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100410536C (zh) | 建筑机械的控制设备和计算输入力矩的方法 | |
| US5361211A (en) | Control system for automatically controlling actuators of an excavator | |
| EP1961869B1 (en) | Rotation control device and working machine therewith | |
| JP5026055B2 (ja) | 複数アクチュエータの圧力に基づく流れ制御システム | |
| CN100354513C (zh) | 建筑机械的原动机控制装置 | |
| US9303633B2 (en) | Over-speed control system and method | |
| JP5508324B2 (ja) | 作業車両の駆動制御装置 | |
| US8504257B2 (en) | Work vehicle and method of controlling the same | |
| JP3697136B2 (ja) | ポンプ制御方法およびポンプ制御装置 | |
| EP2288758B1 (en) | A method and a system for operating a working machine | |
| KR20070046853A (ko) | 작업차량의 엔진의 부하제어장치 | |
| US11326324B2 (en) | Work vehicle and control method for work vehicle | |
| CN101861455A (zh) | 发动机的控制装置 | |
| US20190352881A1 (en) | Work vehicle and control method for work vehicle | |
| US11035462B2 (en) | Work vehicle and control method for work vehicle | |
| US20210131070A1 (en) | Work vehicle and control method for work vehicle | |
| US5434785A (en) | System for automatically controlling quantity of hydraulic fluid of an excavator | |
| US12071138B2 (en) | Work machine and method for controlling work machine | |
| JP2968558B2 (ja) | トルクコンバータ付き走行作業車両の油圧ポンプ制御装置 | |
| JP4127771B2 (ja) | 建設機械のエンジン制御装置 | |
| JP4242038B2 (ja) | ホイール走行式油圧建設機械 | |
| JP4425600B2 (ja) | 建設機械の制御装置 | |
| JP3898981B2 (ja) | 産業車両の走行制御装置 | |
| KR100691665B1 (ko) | 건설 기계의 제어 장치, 및 입력 토크 연산 방법 | |
| JPH05140968A (ja) | 油圧建設機械の原動機回転数制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20080813 Termination date: 20180926 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |