CN100350875C - 类内窥镜图像获取方法和使用该方法的磁共振成像设备 - Google Patents
类内窥镜图像获取方法和使用该方法的磁共振成像设备 Download PDFInfo
- Publication number
- CN100350875C CN100350875C CNB028140133A CN02814013A CN100350875C CN 100350875 C CN100350875 C CN 100350875C CN B028140133 A CNB028140133 A CN B028140133A CN 02814013 A CN02814013 A CN 02814013A CN 100350875 C CN100350875 C CN 100350875C
- Authority
- CN
- China
- Prior art keywords
- conduit
- image
- image data
- guide wire
- patient
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims abstract description 58
- 238000002595 magnetic resonance imaging Methods 0.000 title description 33
- 238000003780 insertion Methods 0.000 claims abstract description 26
- 230000037431 insertion Effects 0.000 claims abstract description 26
- 238000003384 imaging method Methods 0.000 claims description 58
- 238000002372 labelling Methods 0.000 claims description 45
- 230000005291 magnetic effect Effects 0.000 claims description 42
- 230000000007 visual effect Effects 0.000 claims description 21
- 230000003068 static effect Effects 0.000 claims description 15
- 238000005259 measurement Methods 0.000 claims description 11
- 230000008569 process Effects 0.000 claims description 11
- 239000002184 metal Substances 0.000 claims description 8
- 229910052751 metal Inorganic materials 0.000 claims description 8
- 238000006073 displacement reaction Methods 0.000 claims 1
- 238000005481 NMR spectroscopy Methods 0.000 description 34
- 210000004204 blood vessel Anatomy 0.000 description 33
- 230000015572 biosynthetic process Effects 0.000 description 8
- 239000000463 material Substances 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 230000004087 circulation Effects 0.000 description 3
- 239000004020 conductor Substances 0.000 description 3
- 238000005520 cutting process Methods 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 239000003550 marker Substances 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 206010020675 Hypermetropia Diseases 0.000 description 1
- 238000001467 acupuncture Methods 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 238000001574 biopsy Methods 0.000 description 1
- 230000017531 blood circulation Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 239000002872 contrast media Substances 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 208000002925 dental caries Diseases 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 230000005294 ferromagnetic effect Effects 0.000 description 1
- 201000006318 hyperopia Diseases 0.000 description 1
- 230000004305 hyperopia Effects 0.000 description 1
- 238000012966 insertion method Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000008520 organization Effects 0.000 description 1
- 238000003909 pattern recognition Methods 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000000750 progressive effect Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 238000001356 surgical procedure Methods 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; Determining position of diagnostic devices within or on the body of the patient
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/285—Invasive instruments, e.g. catheters or biopsy needles, specially adapted for tracking, guiding or visualization by NMR
- G01R33/286—Invasive instruments, e.g. catheters or biopsy needles, specially adapted for tracking, guiding or visualization by NMR involving passive visualization of interventional instruments, i.e. making the instrument visible as part of the normal MR process
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/80—Geometric correction
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
- A61B2090/365—Correlation of different images or relation of image positions in respect to the body augmented reality, i.e. correlating a live optical image with another image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/374—NMR or MRI
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3954—Markers, e.g. radio-opaque or breast lesions markers magnetic, e.g. NMR or MRI
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3954—Markers, e.g. radio-opaque or breast lesions markers magnetic, e.g. NMR or MRI
- A61B2090/3958—Markers, e.g. radio-opaque or breast lesions markers magnetic, e.g. NMR or MRI emitting a signal
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Surgery (AREA)
- General Physics & Mathematics (AREA)
- Biomedical Technology (AREA)
- Pathology (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Animal Behavior & Ethology (AREA)
- Theoretical Computer Science (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Biophysics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Human Computer Interaction (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Robotics (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Processing Or Creating Images (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
- Endoscopes (AREA)
Abstract
在包括插入主体的体腔并用作从主体接收MR信号的装置的导引线、以及具有能够与MR图像的其他部分相区别并附加在其末端的特殊标记的由导引线引导的导管的MRI设备中,一种方法和设备用于依据MR信号创建沿着导引线的三维图像数据;依据三维图像数据检测特殊标记,确定导管的末端位置和插入方向,并且通过使所述位置成为视点以及使插入方向成为视线的实时支持导管插入的方式,显示由三维图像数据形成的内窥镜图像。
Description
技术领域
本发明涉及一种磁共振成像设备(下称MRI设备),更具体地说,涉及一种用于实时地获取和显示从插入体腔的导管观察到的病人的诸如血管等体腔的类内窥镜图像的技术。
背景技术
MRI设备是通过利用核磁共振现象获取病人的层析X射线照片和频谱来观察病人体内的设备,该MRI设备包括静态磁场产生器、梯度磁场线圈、发射线圈和接收线圈。静态磁场产生器对准构成病人的核子(通常为质子)自旋的方向,梯度磁场线圈识别病人的成像切片,以及对针对从病人获得的核磁共振信号的位置信息进行编码,发射线圈产生具有与质子的共振频率相同频率的高频率磁场,而接收线圈接收来自质子的信号。
如上所述设置的MRI设备可以有选择地对任意区域和组织中任一个进行成像,并且依据要被成像的病人,已经提出了各种成像方法。例如,可以使用二维或者三维测量来执行成像。此外,近年来,作为MRI设备所应用的重要领域,已经开发出当将导管针刺或者引入血管时利用MRI设备作为导管监视器的方法(IV-MRI)。在该IV-MRI中,需要实时地执行成像并显示图像,从而诸如可以使导管准确无误地插入到目标位置,而且各种类型的高速成像方法例如EPI等已经得到了实际应用。
相反,当如上所述地插入导管时,依据要成像的部分,已经开发和实际使用了各种形状的接收线圈,并且已经提出也充当导管导引线的RF接收天线作为优先使用的接收线圈(例如,日本待审专利公开No.10-179550、PCT日文译本专利申请No.2000-509276、文件《Intravascular Magnetic Resonance Imaging Using a LooplessCatheter Antenna》,MRM 37:112-118(1997)等)。注意,由于导引线形状的RF接收天线的可测量灵敏度范围局限在导引线附近,因此,可以成像的层析X射线照片限制在较小区域(例如,几个微米)。
然而,由传统MRI设备获得的图像主要是层析X射线照片。因此,传统MRI设备在确认插入到具有弯曲部分的体腔,例如血管的导管位置的应用中较为不利,这是由于这些MRI设备不能够唯一地确定包括导管的切片平面。相反,对于直针,传统MRI设备可以通过将主动或正标记添加到针上,自动地获取在包括针的平面上或者与针正交的平面上的层析X射线照片,并且存在许多传统技术。此外,对于导管,已知通过在导管中提供能够由MRI设备识别的标记来执行成像的方法。然而,由于不能够唯一地确定包括具有弯曲部分的导管的切片平面,因此,确认导管的插入位置总是不太容易。
顺便说明,申请人已经提出了利用由X射线CT设备和MRI设备获得的三维图像数据创建类内窥镜图像的方法,作为显示血管等的内壁图像,替代传统的层析X射线照片(日本待审专利公开No.7-210704和8-16813)。依据该方法,可以将包括血管等区域的三维层析X射线照片数据转换为由中心投影方法从内部观察到的体腔等的内壁图像(类内窥镜图像),并且显示该图像,该图像对终端非常有效。在这种情况下,可以依据特定的描影算法对图像进行处理。
然而,传统类内窥镜图像的建立是通过依据已经获得的三维图像数据创建该图像的方法进行的,此外,视点和视线方向必须由鼠标或者跟踪球输入。因此,该方法不能够应用到实时地执行图像的成像和显示的IV-MRI。
发明内容
本发明的目的是通过实时地或者准实时地获取和显示从体腔中观察到的病人体腔内部的类内窥镜图像,支持导管的插入。
为了实现上述目的,本发明的类内窥镜图像获取方法的特征在于其包括:准备步骤,在导管的末端处设置能够与MR图像上的其他部分相区别的至少一个特殊标志;第一步骤,预先插入用于将导管引导到其中插入导管的病人的体腔中的金属导引线;第二步骤,沿着导引线将导管插入体腔;第三步骤,执行与导引线相交的多个切片图像的MR成像程序;第四步骤,依据由所述导引线接收的当执行所述程序时从病人产生的核磁共振信号,重新设置三维图像数据,并且通过依据三维图像数据检测在导管的末端设置的特殊标志,确定导管的末端位置和插入方向;以及第五步骤,通过使用三维图像数据并且使用导管的末端位置和插入方向作为视点和视线方向,重新设置中心投影图像,并且在显示装置上显示中心投影图像。
依据本发明的成像方法,通过沿长度方向在体腔内滑动到多个部分,可以获得三维图像数据,并可以依据三维图像数据检测到导管的末端位置和方向。结果是,通过已知的中心投影方法,可以重新构造使用导管末端作为视点并且与内窥镜获取的图像(巡航视图)相似的图像。因此,操作人员在实时地观察从导管末端观察到的体腔内壁状态的同时插入导管,并且这对于在IV-MRI中插入导管非常有效。例如,当血管在前进位置处分支时,操作人员可以在从一侧观察它的同时,确定想要将导管引导到的血管的分支。特别地,当将首先摸索地插入的导引线插入到不同的分支时,可以容易地将导引线拉出一点然后再将其插入。
当导引线由接收天线构成、并且所要成像的三维图像数据的切片间隔变窄时,增加了三维图像数据的成像时间,因此可能会使实时成像特性恶化。因而,当三维图像数据的切片间隔变宽时,可以想到依据三维图像数据检测在导管上设置的特殊标志较困难。
为了解决上述问题,在本发明的另一成像方法中,存储通过对与导引线相交的多个切片执行MR成像程序重新构造的三维图像数据。然后,通过执行在三轴方向上对导管末端的NMR信号进行测量的测量程序,将测量的NMR信号投影到各个轴的方向上,并且使用投影NMR信号的三轴的投影,可以检测导管的末端位置和插入方向。即,当通过具有较短测量时间的三轴投影方向检测到导管的末端位置和插入方向时,通过增加检测导管的末端位置和插入方向的频率,即使减小了花费较长测量时间的三维图像的成像频率也可以保持实时成像特性。即,每次当执行通过检测导管末端位置和插入方向重新设置中心投影图像的处理时,都可以执行用作中心投影的基准的三维图像数据的成像程序一次。
此外,在本发明的另一成像方法中,通过预先执行在三轴方向上测量导管末端的NMR信号的测量程序来检测导管的末端位置和插入方向,将切片位置设置在检测到的导管末端位置的前面,并且执行与导引线相交的多个切片图像的MR成像程序,可以减少切片数量,从而可以减少三维图像数据的测量时间。
在上述的分别的发明中,可以使用在导管的末端与导管共轴地设置的环状标记作为特殊标志。在这种情况下,最好通过使其位置在导管的轴向上偏移,设置在导管的末端设置至少两个标记。依据上述配置,与设置一个标记的情况相比,可以改善检测导管方向的精度。
通过使其包括以下组件可以实现本发明的MRI设备,所述组件包括:磁场产生装置,用于产生施加到病人的静态磁场、梯度磁场和高频磁场的分别的磁场;接收装置,用于接收从病人产生的核磁共振信号;图像重新构造装置,用于使用如此接收的核磁共振信号,重新构造病人的三维图像数据;显示装置,用于显示重新构造的图像;以及控制装置,用于控制磁场产生装置、接收装置、和图像重新构造装置,其中,在插入到病人体腔的导管的末端设置能够与MR图像上的其他部分相区别的至少一个特殊标志,以及使用用于引导导管的金属导引线作为接收装置;以及图像重新构造装置使用由导引线接收的核磁共振信号重新构造三维图像数据,使用如此重新构造的三维图像数据来检测特殊标志,依据该特殊标志确定导管的末端位置和插入方向,并且通过使用三维图像数据并且将如上所述确定的导管的末端位置和插入方向设置为视点和视线方向,重新构造中心投影图像,并且在显示装置上显示该中心投影图像。
即,在本发明的MRI设备中,将导引线作为RF接收天线插入病人的体腔例如血管,在通过RF接收天线连续地获得核磁共振(NMR)信号的同时插入导管,依据获得的信号检测导管的末端位置,并且依据获得的信号重新构造具有沿着导管方向的视点的图像,并且进行显示,使用上述操作,可以在插入导管的同时显示犹如通过插入内窥镜对其进行观察的图像。
而且,虽然在普通内窥镜中可以只显示可视图像,由于在本发明中可以重新构造犹如由内窥镜获得的图像,因此,可以显示只能够由MRI设备获得的功能信息,例如血管中的梗塞和血块以及例如空斑和脂肪等特殊组织的功能信息。
另外,在本发明的MRI设备中,重复地执行以下各个步骤:测量用来获得三维图像数据的核磁共振信号;确定在中心投影中使用的视点和视线方向;以及重新设置和显示类内窥镜图像。最好是,当以每秒一个循环的速度重复这些步骤时,可以大致实时地显示类内窥镜图像。
附图说明
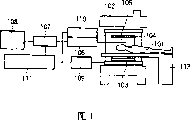
图1示出应用本发明的实施例的MRI设备的总体配置;
图2是用于解释依据本发明还充当RF接收天线的导引线以及由导引线引导的导管的使用状态的示意图;
图3是示出依据本发明的类内窥镜图像获取方法的实施例的过程的流程图;
图4是示出由本发明的类内窥镜图像获取方法获得的三维图像数据的实例的示意图;
图5是示出由本发明的类内窥镜图像获取方法获得的三维图像数据的实例的示意图;
图6是用于解释在本发明的类内窥镜获取方法的中心投影处理的示意图;
图7是用于解释在本发明的类内窥镜图像获取方法中创建中心投影图像的方法的示意图;
图8是示出由中心投影处理获取的类内窥镜图像的示意图;
图9是示出依据本发明的类内窥镜图像获取方法的另一实施例的过程的流程图;以及
图10是示出依据本发明的类内窥镜图像获取方法的另一实施例的过程的流程图。
具体实施方式
下面将参考附图描述本发明的实施例。
图1示出了应用本发明的MRI设备的总体配置。MRI设备包括静态磁场磁铁102、梯度磁场产生线圈103、RF辐射线圈104、还充当用于检测从病人101产生的核磁共振信号的RF接收天线的导引线105、以及用于将病人带到测量空间的床112,这些组件安装在成像间中。静态磁场磁铁102在测量空间内产生均匀的磁场,梯度磁场产生线圈103向由静态磁场磁铁102产生的静态磁场提供磁场梯度,以及RF辐射线圈104向置于测量空间中的病人辐射高频率磁场。
将永久磁铁、通常的导电磁铁或者超导电磁铁用作静态磁场磁铁102,并且在与病人101置于其中的测量空间中的病人101身体轴线正交或者平行的方向上产生均匀的静态磁场。所示出的实例采用了由设置在测量空间的上部和下部的一对儿静态磁场磁铁构成的开放型静态磁场磁铁102,从而在上/下方向(与病人101的身体轴线正交的方向)上形成静态磁场,以使IV-MRI设备可被容易地操作。
梯度磁场产生线圈103由三个线圈构成,所述三个线圈在相互正交的三轴方向上分别产生梯度磁场,并且分别与梯度磁场电源109连接。RF辐射线圈104与具有振荡器、调制器和放大器的发射电路110连接,其中所述的振荡器产生具有与质子的共振频率相同频率的高频波。
还充当RF接收天线的导引线105与具有接收放大器、相位检测器、A/D转换器等的接收电路106连接。导引线105由较细且柔性的金属线形成,以实现对插入到体腔内的导管200进行导引的功能,以及如图2所示一端与接收放大器106A连接,以实现RF接收天线的功能。此外,导引线105最好由非磁性金属线形成,从而不会干扰磁场的分布。在诸如《Intravascular Magnetic Resonance Imaging Using aLoopless Catheter Antenna》(MRM37:112-118(1997))中公开的无环路(loopless)导管天线可以用作还充当RF接收天线的导引线105。
注意,除了还充当RF接收天线的导引线105之外,该实施例可以具有与普通MRI设备一起提供的整体或者部分RF接收线圈。
梯度磁场电源109、发射电路110和接收电路106安装在成像间的外部,并且由同样安装在成像间外部的计算机111控制。依据在计算机111中设置的成像程序,通过程序发生器107控制梯度磁场电源109、发射电路110和接收电路106的操作。此外,捕获由发射电路110接收的核磁共振信号,并且通过执行诸如内插计算、傅立叶变换等算法操作来重新构造图像。计算机111包括:通过其输入和设置处理条件等的控制台;用于存储程序、正在被处理数据、已经处理的数据等的存储设备、用于显示重新构造的图像的显示单元108等。
此外,计算机111使用发射电路110接收的核磁共振信号创建三维图像数据,并依据如稍后将要描述的三维图像数据中包括的特殊标志,确定视点和视线方向,然后使三维图像数据经过中心投影处理,创建类内窥镜图像,并且在显示单元108上显示该图像。
另一方面,导管200具有如图2所示在轴向上延伸的孔201,以使导引线105通过。注意,虽然并未示出,但是导管200通常具有沿轴向延伸的多个孔,从其中通过用于收集组织的装置和充气囊。具体地说,本实施例的导管200具有设置在其末端202的两个环状标记203和204。标记203和204由能够从除了MR图像上的标记之外的组织等图像中识别的材料形成。例如,以高亮度响应核磁共振(NMR)信号的材料可以埋入导管中作为正标记。相反,以产生信号缺损响应NMR信号的材料可以埋入导管中作为负标记。已经许多方法作为将标记203和204埋入导管200中的方法,并且可以使用这些方法中的任一种。例如,可以采用埋入顺磁性金属粉末作为标记的方法,在导管中使用对比剂作为标记的方法,将导体拉出到外部、向导体提供电流、并且通过由于电流产生的磁场干扰造成的信号缺损使导体可见的方法等。简而言之,足以形成能够从在MR图像上的其他组织等的图像中识别的材料等的标记203和204。如上所述,依据能够在MR图像上识别的标记203和204的位置和方法,确定稍后将要描述的用于创建类内窥镜图像的视点和视线方向。
下面将对本实施例的MRI设备的详细配置与其操作一起进行描述。图3示出了当插入导管时连续成像过程的实例。首先,病人101躺在床112上,插入到静态磁场中并位于图1所示的静态磁场的中心。随后,将还充当RF接收天线的导引线105摸索地插入作为要诊断或治疗的主体的图2所示病人101的血管210(步骤S1)。插入导引线105的方法与传统导引线插入方法相同,并且将导引线插入要对病人101进行检查的部分附近的位置。此时,当导引线105可以由NMR信号识别时,则可在插入该导引线同时进行成像。之后,沿着图2所示的导引线105插入导管200(步骤S2)。
当导管200的末端202大致到达想要观察的部分时,开始获取MR图像以创建类内窥镜图像(步骤S3)。成像方法(成像程序)没有特别的限制,只要它能够在短时间内收集三维图像数据即可。例如,可以使用单拍EPI和多拍EPI。此外,通过累积多个二维层析X射线照片数据可以创建三维图像数据,或者可以通过三维成像程序测量三维图像数据。
图4和5示出了通过在步骤S3执行成像获得的三维图像数据的示意图。在所示出的实例中,选择成像切片(例如切片1到8),这些切片相对于其中插入导管200的血管210大体正交,并且通过顺序地重复成像同时改变切片,获取多个(例如8张)切片图像数据。由于导引线105的有效灵敏度范围较窄,所以只获取沿着导引线105即沿着血管210的较窄区域220的NMR信号。例如,由图5中的圆圈501包围的部分示出了导引线105的灵敏度范围。通常,因为血液流动而不能在血管210中测量NMR信号的原因,针对血管壁502形成的是空图像,而针对血管210的外部区域形成了黑色图像。此外,由于导引线105由在NMR信号中产生如上所述的信号缺损的材料形成,因此,针对导引线105形成白色图像。
随后,计算机111通过使用获得的三维图像数据执行中心投影来重新构造类内窥镜图像(步骤S4和S5)。在中心投影处理中,首先,投影平面602设置在按照图6所示的预定方向(视线方向)远离预定视点601预定距离(焦距)D的位置处,从而使投影平面602与视线方向正交或者相交。然后,执行用于将各个切片1到8的像素数据投影到投影平面602上的处理,即,执行用于将切片1到8的像素坐标转换为投影平面602的坐标的处理。具体地说,可以使用在日本待审专利申请No.7-120704和8-16813中公开的技术来执行处理。即,当确定了切片1到8的平面和投影平面602之间的角度以及视点601和切片1到8的像素之间的距离时,可将切片1到8的像素坐标转换为投影平面的坐标。然后,依据视点坐标、视线方向和焦距D,可以确定切片平面和投影平面602之间的角度以及视点601和切片平面的像素之间的距离。
为了执行中心投影处理,计算机111使用在获得的三维图像数据中包括的标记(特殊标志)来确定视点601的坐标和视线方向(步骤S4)。当在步骤S3获取MR图像时包括标记203和204的导管200的末端到达切片平面的情况下,已经获取的三维图像数据的切片6和7的图像数据包括如图7所示的标记203和204的图像。因此,可以从诸如标记203的位置中检测到导管200的末端位置。此外,可以依据使标记203连接到标记204的直线来检测导管200的插入方向。
也就是说,两个标记203和204设置在导管200的顶端和位于顶端之后一点的位置上。然后,设置在顶端的标记203的位置用作视点。此外,连接两个标记203和204的直线用作视线矢量603,而位于从视线矢量603延伸的线上并且从充当视点的标记203具有预定距离D的点用作投影平面602的原点604。通过原点604并且与视线矢量603正交的平面被确定为投影平面602。
越长的焦距D将产生越窄的视角,由此可以获得犹如通过远视镜头对其进行观察的图像。相反,越短的焦距D产生越宽的视角,由此可以获得犹如通过广角镜头对其进行观察的图像。可以依据所要观察的血管厚度或者诊断目标,预先对焦距D进行设置,或者在所有情况下,可以通过计算机111的控制台对焦距D进行设置。
注意,计算机111根据标记203和204是正标记或负标记,从三维图像中不同地识别标记203和204。当例如标记203和204是负标记,并且具有最低信号值的像素区域存在于在图5所示的切片图像数据中的血管壁502的像素中具有最低信号值的像素(对应于本实施例的导引线105的像素)周围时,则确定标记203存在于该区域中。然后,将标记203的中心坐标设置为视点601。除了上述方法之外,可以使用利用模式识别的方法等。
当如上所述确定了视点和视线方向时,在步骤S4定义的图中执行从视点601到投影平面602的中心投影(步骤5)。由此操作,各个切片1到8的像素值被投影到视点601周围的半径图案中的投影平面602上。该处理从位于视点601较远的切片开始顺序地执行,并且当下一个切片的像素值与已经投影的像素值重叠时,由离视点更近的像素值重写投影的像素值。通过如上所述顺序由离视点601更近的切片的像素值重写投影的像素值,在投影平面602上形成从视点601观察的图像(类内窥镜图像)。已知为深度方法和体数据绘制方法的描影算法可以应用于由此获得的类内窥镜图像,从而可以更容易地辨别类内窥镜图像的光亮和阴影部分。
图8示意地示出了如上所述获得的类内窥镜图像。由于图像显示在显示单元108上,因此操作人员可以在观察图像的同时进一步移动导管。当随着导管的前向移动而及时地重复步骤S2到S5时,显示具有不同视点和视线方向的新类内窥镜图像。
由于当从导管的顶端对其进行观察时,类内窥镜图像是血管内的图像,因此可以容易地发现与导管相关的血管的分支状态等。因而,在观察血管分支的同时,能够确定导引线要被插入的方向。此外,由于使用还充当RF接收天线的导引线105接收的NMR信号创建类内窥镜图像,因此可以获得只在其中插入导引线的导管等周围的较窄部分中具有高S/N比的图像。因而,能够结合导管的插入,观察血管壁以及想要观察部分的周围。
此外,最好采用高速成像方法,通过该方法,可以使用由导引线接收的NMR信号,在对三维图像数据进行成像的程序中以100微秒的数量级获取三维图像数据。依据该方法,从步骤S2到步骤S5的循环可以按照诸如每秒一个循环的速度重复,从而可以几乎实时地显示与导管的移动一起变化的图像。在周期被重复的同时,操作人员进行观察,并且能够在需要时通过使用导管的外科工具而有效地执行例如IV-MRI活组织检查。
虽然已经描述了本发明的实施例,但是本发明决不仅局限于这些实施例,而是可以进行各种修改。例如,图3所示的实施例解释了实时地重复对三维图像数据的成像和图像的重新构造、以及类内窥镜图像的重新构造和显示的情况。然而,每一次当重复类内窥镜图像的重新构造和显示时,不必要必须获得三维图像数据。例如,每一次当多次重复类内窥镜图像的重新构造和显示时,可以获得二维图像。
此外,可以在插入导管200之前获得三维图像数据,并且可以如图9所示地使用三维图像数据重复类内窥镜图像的重新构造和显示。同时,在本实施例中,在导管200的末端202处设置能够与MR图像上的其他部分相区分的两个标记203和204的特殊标志,作为在执行成像之前所执行的基本步骤。当开始成像时,将导管200引导到其中插入导管200的病人101的血管210中的非磁性金属导引线105,被预先插入到血管中(步骤S21)。与上述实施例中使用的导引线105相似,导引线105还充当RF接收线圈。然后,在插入导管200之前,执行MR成像来获得覆盖包括导引线5和目标位置的相对较大的区域的三维图像数据,并且将已经重新构造的三维图像数据存储在计算机111的存储设备中(步骤S22)。随后,导管200沿着导引线105向前移动(步骤S23),当导管接近目标位置时,执行标记检测MR成像,以检测在导管200的末端202处设置的标记203和204的位置(步骤S24)。MR成像程序可以是与在步骤S22执行的成像程序相似的程序。在这种情况下,由于只需要检测标记203和204的位置,因此执行在步骤S24的MR成像,以便对相对较窄的区域进行成像。也就是说,对在图4中与血管210大致正交的切片进行成像。然而,在本实施例中,由于从在步骤S22预先获得的三维图像数据中可以找到血管210的位置,因此,可以对作为包括血管210的部分的切片平面执行在步骤S24的MR成像。由此可以减少切片的数量。
此外,作为上述方法的替代,可以执行在步骤S24的MR成像方法,从而执行在三轴方向上测量导管200的末端202的NMR信号的测量程序,将如此测量到的NMR信号分别投影到各个轴的方向上,并且依据对NMR信号进行投影的三轴的投影,检测导管200的末端202。由设置在病人101体外的普通RF接收线圈接收此时的NMR信号。
依据如此获得的图像或者NMR信号,可以检测在两个标记203和204的末端202的最末端一侧上的标记203的位置(视点)和连接两个标记203和204的线(视线方向)(步骤S25)。
随后,将在步骤S25检测到的标记203的位置确定为视点,将连接两个标记203和204的线确定为视线方向,使用在步骤S22获得的三维图像数据执行中心投影处理,并且重新构造类内窥镜图像(步骤S26)。即,如图6所示,通过对具有预定焦距D的投影平面602执行中心投影处理,创建从视点观看的图像。如上所述,通过在移动导管200的同时重复从步骤S23到S26的处理,与内窥镜相似地显示其中血管中的图像依据导管200的前向移动而变化的类内窥镜图像。
依据图9的实施例,由于在相对较窄的区域或者对较少数量的切片执行在步骤S24的标记检测MR成像,可以减少成像时间,因此,该标记检测MR成像可以在比第三实施例中的步骤S3所执行的MR成像的时间更短的时间内执行。因此,依据该实施例,可以进一步改进实时成像特性。然而,在本实施例中,由于在不同的定时执行获得三维图像数据的MR成像和用于检测导管的标记的MR成像,因此,当血管的形状由于插入导管而改变时,或者当需要观察血管形状的变化时,最好执行图3中的实施例。
图10示出了依据本发明的类内窥镜图像的成像方法的另一实施例的流程图。同时,在本实施例中,在导管200的末端202处设置有能够与MR图像上的其它部分相区别的两个标记203和204的特殊标志,作为在执行成像之前的基本步骤。当成像开始时,用于将导管200引导到作为其中插入导管200的病人101的体腔实例的血管中的非磁性金属导引线105,被预先插入到目标部分中(步骤S21)。虽然主要是摸索地插入导引线105,但是可以在通过根据需要执行MR成像进行监视的同时插入导引线105。然后,沿着导引线105将导管200插入到血管中(步骤S32)。
随后,对导管200的末端202执行MR成像程序,以检测末端202(步骤S33)。MR成像程序是被称为投影方法的程序,通过该方法,测量三个轴中的每一个轴,并且投影三个轴的信号。即,在导管200的长度方向上间隔地设置切片的厚度和位置,从而使每一个切片都包含充当能够与MR图像中的其它部分相区别的特殊图像的标记203和204,并且对三个正交轴的NMR信号进行测量。其中,三个轴的方向例如是其中躺平的病人101具有水平部分(COR)、垂直纵向部分(SAG)和垂直横向部分(TRS)的切片平面的方向。
当在步骤S33测量了在三轴方向上的信号时,从病人101产生的NMR信号由设置在病人101体外的普通RF接收线圈进行接收,并且将各个接收的信号投影到各个轴的方向上。随后,依据投影了NMR信号的三个轴的投影,检测几何标记203和204的位置。然后,通过使用标记203作为视点并使用将标记203连接到标记204的直线方向作为导管200的方向即视线方向,确定导管200的末端位置和方向(步骤S34)。注意,如果导管200的向前移动方向不是不改变的,则可以通过在两轴方向上的投影对其进行跟踪,并且不需要测量三个轴的投影,因而通过转换测量程序,可以缩短测量时间。注意,可以通过获取在三轴方向上的二维图像或者三维图像的方法,检测导管200的末端202的几何位置。
随后,执行与导引线105大致正交的多个切片图像的MR成像程序(步骤S35)。当执行上述程序时从病人101产生的NMR信号由导引线105接收,并且三维图像数据由计算机111重新构造。然后通过使用三维图像数据并且将导管200的末端位置和插入方向设置为视点和视线方向,重新构造中心投影图像,并且在显示装置上细重新构造的中心投影图像(步骤S6)。
如上所述,依据图10的实施例,由于对导管200的末端位置和方向进行检测,并且使用导引线作为RF接收天线,依据导管200的末端位置和方向获得三维图像数据,因此,三维图像的成像范围可以设置在导管200的末端位置之前。此外,由于使用投影方法对标记203和204的几何位置进行检测,因此,可以缩短位置检测的时间。结果是可以减少三维图像的切片数据。即,依据图3和9的实施例,由于在检测到导管200的位置之前获得三维图像数据,因此,切片平面必须设置在导管的假定位置之前和之后的一定范围内。因此,获得了不需要中心投影的导管后的图像数据,从而增加了成像时间。
如上所述,依据本发明的各个实施例,当在将导管插入病人的血管的同时执行MRI成像时,从实时地获得的信号中检测导管的末端位置和方向,并且重新构造其中通过使用末端位置作为视点而受到中心投影处理的图像。因此,在插入导管的同时,可以显示犹如通过插入内窥镜对其进行观察的实时图像。结果是本发明在IV-MRI的导管插入操作中非常有效。例如,当血管在向前的位置处分支时,在观察图像的同时,可以确定期望将导管导入其中的血管的分支。
此外,虽然导管设置有两个标记,并且导管的方向(视线方向)由标记确定,但是在导管末端设置至少一个标记是足够的。当导管设置有一个标记并且在向前移动导管的同时重复MR成像时,通过每一次当重复MR成像时由算法操作确定标记的位置变化,可以检测到视线方向。
此外,在上述实施例中已经描述了将二维数据累积为三维数据的情况。然而,本发明决不仅限于此,而通过在步骤S3或者步骤S22和S24执行的三维测量,可以获取三维数据。
另外,在上述实施例中已经解释了将血管壁的形态图像简单地显示为类内窥镜图像的情况。然而,除了上述情况之外,本发明通过按照强调模式显示诸如脂肪信号,有效地显示了MRI所固有的信息。而且,本发明还有效地获取除了血管之外的每一个体腔的类内窥镜图像。
Claims (8)
1.一种磁共振成像设备,包括:
磁场产生装置,用于产生施加到病人的静态磁场、梯度磁场和高频磁场的分别的磁场;接收装置,用于接收从病人产生的核磁共振信号;图像重新构造装置,用于使用如此接收的核磁共振信号,重新构造病人的三维图像数据;显示装置,用于显示重新构造的图像;以及控制装置,用于控制磁场产生装置、接收装置、和图像重新构造装置,其特征在于:
在插入到病人体腔的导管的末端设置的能够与磁共振图像上的其他部分相区别的至少一个特殊标志,以及使用用于引导导管的金属导引线作为接收装置;以及
图像重新构造装置使用由导引线接收的核磁共振信号重新构造三维图像数据,使用重新构造的三维图像数据来检测特殊标志,根据该特殊标志确定导管的末端位置和插入方向;并且通过使用三维图像数据并且将所述确定的导管的末端位置和插入方向设置为视点和视线方向,重新构造中心投影图像,并且在显示装置上显示该中心投影图像。
2.如权利要求1所述的设备,其中图像重新构造装置通过利用设置在病人体外的接收线圈接收的、在三轴方向上对导管的末端执行的测量程序取得的信号来确定所述导管的末端位置。
3.如权利要求1所述的磁共振成像设备,其中所述控制装置执行与导引线相交的多个切片图像的成像程序,以取得核磁共振信号。
4.根据权利要求1到3中的任一个所述的磁共振成像设备,其特征在于:所述特殊标志是在导管的末端与导管共轴地设置的环状标记。
5.根据权利要求4所述的磁共振成像设备,其特征在于:其特征在于:以这些标记的位置在导管的轴向上被位移的方式在导管的末端设置至少两个标记。
6.根据权利要求1到3中的任一个所述的磁共振成像设备,其特征在于:控制装置重复以下步骤:第一步骤,执行成像程序,以便获得三维图像数据;第二步骤,确定导管的末端位置和插入方向;以及第三步骤,重新排列并且显示中心投影的图像。
7.根据权利要求6所述的磁共振成像设备,其特征在于:当多次重复第一到第三步骤的每一次时,控制装置都对第一步骤执行一次。
8.根据权利要求1到3中的任一个所述的磁共振成像设备,其特征在于:通过依据导管插入位置而变化的方式,在显示装置上显示在导管插入方向前面的体腔的侧壁表面的图像。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001212157A JP3996359B2 (ja) | 2001-07-12 | 2001-07-12 | 磁気共鳴イメージング装置 |
| JP212157/2001 | 2001-07-12 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1527683A CN1527683A (zh) | 2004-09-08 |
| CN100350875C true CN100350875C (zh) | 2007-11-28 |
Family
ID=19047361
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB028140133A Expired - Fee Related CN100350875C (zh) | 2001-07-12 | 2002-07-12 | 类内窥镜图像获取方法和使用该方法的磁共振成像设备 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7653426B2 (zh) |
| EP (1) | EP1410758A4 (zh) |
| JP (1) | JP3996359B2 (zh) |
| CN (1) | CN100350875C (zh) |
| WO (1) | WO2003005902A1 (zh) |
Families Citing this family (55)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8014848B2 (en) | 2004-04-26 | 2011-09-06 | Brainlab Ag | Visualization of procedural guidelines for a medical procedure |
| EP1591074B1 (en) * | 2004-04-26 | 2008-05-21 | BrainLAB AG | Visualization of procedural guidelines for medical procedures |
| JP4914574B2 (ja) * | 2005-04-18 | 2012-04-11 | オリンパスメディカルシステムズ株式会社 | 内視鏡形状検出装置 |
| US9289267B2 (en) * | 2005-06-14 | 2016-03-22 | Siemens Medical Solutions Usa, Inc. | Method and apparatus for minimally invasive surgery using endoscopes |
| DE102005028299A1 (de) * | 2005-06-18 | 2006-12-21 | Hensel, Renate | Gehhilfe |
| JP5044237B2 (ja) * | 2006-03-27 | 2012-10-10 | 富士フイルム株式会社 | 画像記録装置、画像記録方法、および画像記録プログラム |
| JP4153963B2 (ja) * | 2006-06-12 | 2008-09-24 | オリンパスメディカルシステムズ株式会社 | 内視鏡挿入形状検出装置 |
| US20080086051A1 (en) * | 2006-09-20 | 2008-04-10 | Ethicon Endo-Surgery, Inc. | System, storage medium for a computer program, and method for displaying medical images |
| US8457718B2 (en) | 2007-03-21 | 2013-06-04 | Ethicon Endo-Surgery, Inc. | Recognizing a real world fiducial in a patient image data |
| US8155728B2 (en) | 2007-08-22 | 2012-04-10 | Ethicon Endo-Surgery, Inc. | Medical system, method, and storage medium concerning a natural orifice transluminal medical procedure |
| US20080319307A1 (en) * | 2007-06-19 | 2008-12-25 | Ethicon Endo-Surgery, Inc. | Method for medical imaging using fluorescent nanoparticles |
| US9375164B2 (en) | 2007-03-08 | 2016-06-28 | Sync-Rx, Ltd. | Co-use of endoluminal data and extraluminal imaging |
| WO2010058398A2 (en) * | 2007-03-08 | 2010-05-27 | Sync-Rx, Ltd. | Image processing and tool actuation for medical procedures |
| EP2129284A4 (en) * | 2007-03-08 | 2012-11-28 | Sync Rx Ltd | IMAGING AND TOOLS FOR USE WITH MOBILE ORGANS |
| US9968256B2 (en) | 2007-03-08 | 2018-05-15 | Sync-Rx Ltd. | Automatic identification of a tool |
| US9629571B2 (en) | 2007-03-08 | 2017-04-25 | Sync-Rx, Ltd. | Co-use of endoluminal data and extraluminal imaging |
| US11197651B2 (en) | 2007-03-08 | 2021-12-14 | Sync-Rx, Ltd. | Identification and presentation of device-to-vessel relative motion |
| US10716528B2 (en) | 2007-03-08 | 2020-07-21 | Sync-Rx, Ltd. | Automatic display of previously-acquired endoluminal images |
| US11064964B2 (en) | 2007-03-08 | 2021-07-20 | Sync-Rx, Ltd | Determining a characteristic of a lumen by measuring velocity of a contrast agent |
| US20080221434A1 (en) * | 2007-03-09 | 2008-09-11 | Voegele James W | Displaying an internal image of a body lumen of a patient |
| US20080234544A1 (en) * | 2007-03-20 | 2008-09-25 | Ethicon Endo-Sugery, Inc. | Displaying images interior and exterior to a body lumen of a patient |
| US8081810B2 (en) | 2007-03-22 | 2011-12-20 | Ethicon Endo-Surgery, Inc. | Recognizing a real world fiducial in image data of a patient |
| JP5238440B2 (ja) * | 2008-10-02 | 2013-07-17 | 株式会社東芝 | 画像表示装置及び画像表示方法 |
| US10362962B2 (en) | 2008-11-18 | 2019-07-30 | Synx-Rx, Ltd. | Accounting for skipped imaging locations during movement of an endoluminal imaging probe |
| US9095313B2 (en) | 2008-11-18 | 2015-08-04 | Sync-Rx, Ltd. | Accounting for non-uniform longitudinal motion during movement of an endoluminal imaging probe |
| US8855744B2 (en) | 2008-11-18 | 2014-10-07 | Sync-Rx, Ltd. | Displaying a device within an endoluminal image stack |
| US9144394B2 (en) | 2008-11-18 | 2015-09-29 | Sync-Rx, Ltd. | Apparatus and methods for determining a plurality of local calibration factors for an image |
| US9101286B2 (en) | 2008-11-18 | 2015-08-11 | Sync-Rx, Ltd. | Apparatus and methods for determining a dimension of a portion of a stack of endoluminal data points |
| US9974509B2 (en) * | 2008-11-18 | 2018-05-22 | Sync-Rx Ltd. | Image super enhancement |
| US11064903B2 (en) | 2008-11-18 | 2021-07-20 | Sync-Rx, Ltd | Apparatus and methods for mapping a sequence of images to a roadmap image |
| WO2010148083A2 (en) * | 2009-06-16 | 2010-12-23 | Surgivision, Inc. | Mri-guided devices and mri-guided interventional systems that can track and generate dynamic visualizations of the devices in near real time |
| JP6099640B2 (ja) | 2011-06-23 | 2017-03-22 | シンク−アールエックス,リミティド | 管腔の背景の鮮明化 |
| EP2549284A1 (en) * | 2011-07-21 | 2013-01-23 | Koninklijke Philips Electronics N.V. | Position marker for use in an MRI apparatus |
| JP6129590B2 (ja) * | 2012-03-06 | 2017-05-17 | 東芝メディカルシステムズ株式会社 | 画像処理装置、x線撮影装置及び画像処理方法 |
| EP2863802B1 (en) | 2012-06-26 | 2020-11-04 | Sync-RX, Ltd. | Flow-related image processing in luminal organs |
| US10292615B2 (en) | 2012-09-20 | 2019-05-21 | The Johns Hopkins University | Methods and apparatus for accelerated, motion-corrected high-resolution MRI employing internal detectors or MRI endoscopy |
| US9282916B2 (en) * | 2013-03-01 | 2016-03-15 | Pacesetter, Inc. | Vascular branch characterization |
| CN103169445B (zh) * | 2013-04-16 | 2016-07-06 | 苏州朗开医疗技术有限公司 | 一种内窥镜的导航方法及系统 |
| WO2016181317A2 (en) | 2015-05-12 | 2016-11-17 | Navix International Limited | Calculation of an ablation plan |
| EP3294127A1 (en) | 2015-05-12 | 2018-03-21 | Navix International Limited | Systems and methods for tracking an intrabody catheter |
| RU2017140235A (ru) | 2015-05-12 | 2019-06-13 | Навикс Интернэшнл Лимитед | Оценка очагов поражения посредством анализа диэлектрических свойств |
| US10925684B2 (en) | 2015-05-12 | 2021-02-23 | Navix International Limited | Contact quality assessment by dielectric property analysis |
| JP2018529441A (ja) * | 2015-09-30 | 2018-10-11 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | デバイスの位置確認方法、磁気共鳴撮像システム及びコンピュータ・プログラム |
| US10524695B2 (en) | 2015-12-22 | 2020-01-07 | Biosense Webster (Israel) Ltd. | Registration between coordinate systems for visualizing a tool |
| US10244963B2 (en) | 2015-12-22 | 2019-04-02 | Biosense Webster (Israel) Ltd. | Ascertaining a position and orientation for visualizing a tool |
| WO2018011757A1 (en) | 2016-07-14 | 2018-01-18 | Navix International Limited | Characteristic track catheter navigation |
| CN110072449B (zh) | 2016-11-16 | 2023-02-24 | 纳维斯国际有限公司 | 通过电标测进行的食道位置检测 |
| WO2018092063A1 (en) | 2016-11-16 | 2018-05-24 | Navix International Limited | Real-time display of treatment-related tissue changes using virtual material |
| WO2018092062A1 (en) | 2016-11-16 | 2018-05-24 | Navix International Limited | Real-time display of tissue deformation by interactions with an intra-body probe |
| CN110177500B (zh) | 2016-11-16 | 2022-03-04 | 纳维斯国际有限公司 | 组织模型动态视觉渲染 |
| EP3541313B1 (en) | 2016-11-16 | 2023-05-10 | Navix International Limited | Estimators for ablation effectiveness |
| JP6912341B2 (ja) * | 2017-09-27 | 2021-08-04 | 株式会社日立製作所 | 磁気共鳴イメージング装置、それを用いたデバイス位置検出方法、および、画像ガイド下インターベンション支援装置 |
| US10639105B2 (en) * | 2017-11-29 | 2020-05-05 | Canon Medical Systems Corporation | Navigation apparatus and method |
| EP3696593B1 (en) * | 2019-02-12 | 2025-04-02 | Leica Instruments (Singapore) Pte. Ltd. | A controller for a microscope, a corresponding method and a microscope system |
| EP3944809A1 (en) | 2020-07-28 | 2022-02-02 | Koninklijke Philips N.V. | Arrangement and method for determining the position of an invasive device |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5271400A (en) * | 1992-04-01 | 1993-12-21 | General Electric Company | Tracking system to monitor the position and orientation of a device using magnetic resonance detection of a sample contained within the device |
| JPH07210704A (ja) * | 1994-01-18 | 1995-08-11 | Hitachi Medical Corp | 三次元画像の構成方法 |
| EP0673621A1 (en) * | 1994-03-18 | 1995-09-27 | Schneider (Europe) Ag | A medical appliance for use in magnetic resonance imaging procedures |
| JPH0816813A (ja) * | 1994-06-24 | 1996-01-19 | Hitachi Medical Corp | 画像形成方法及び装置、表示方法及び表示装置 |
| JPH10314137A (ja) * | 1997-05-20 | 1998-12-02 | Terumo Corp | カテーテル |
| US6171240B1 (en) * | 1996-12-05 | 2001-01-09 | Picker International, Inc. | MRI RF catheter coil |
| JP2001070248A (ja) * | 1999-09-02 | 2001-03-21 | Toshiba Corp | 画像処理装置 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5694530A (en) * | 1994-01-18 | 1997-12-02 | Hitachi Medical Corporation | Method of constructing three-dimensional image according to central projection method and apparatus for same |
| JP3770280B2 (ja) | 1996-03-29 | 2006-04-26 | 株式会社日立メディコ | 三次元画像の表示方法及び装置 |
| US7236816B2 (en) * | 1996-04-25 | 2007-06-26 | Johns Hopkins University | Biopsy and sampling needle antennas for magnetic resonance imaging-guided biopsies |
| US5928145A (en) * | 1996-04-25 | 1999-07-27 | The Johns Hopkins University | Method of magnetic resonance imaging and spectroscopic analysis and associated apparatus employing a loopless antenna |
| JPH1043155A (ja) | 1996-08-01 | 1998-02-17 | Olympus Optical Co Ltd | 磁気共鳴観測装置 |
| US6026316A (en) * | 1997-05-15 | 2000-02-15 | Regents Of The University Of Minnesota | Method and apparatus for use with MR imaging |
| US6061587A (en) * | 1997-05-15 | 2000-05-09 | Regents Of The University Of Minnesota | Method and apparatus for use with MR imaging |
| US6272370B1 (en) * | 1998-08-07 | 2001-08-07 | The Regents Of University Of Minnesota | MR-visible medical device for neurological interventions using nonlinear magnetic stereotaxis and a method imaging |
| US7048716B1 (en) * | 1997-05-15 | 2006-05-23 | Stanford University | MR-compatible devices |
| US6675037B1 (en) * | 1999-09-29 | 2004-01-06 | Regents Of The University Of Minnesota | MRI-guided interventional mammary procedures |
| WO2001056469A2 (en) * | 2000-02-01 | 2001-08-09 | Surgi-Vision, Inc. | Magnetic resonance imaging transseptal needle antenna |
| US6484049B1 (en) * | 2000-04-28 | 2002-11-19 | Ge Medical Systems Global Technology Company, Llc | Fluoroscopic tracking and visualization system |
| US6714809B2 (en) * | 2000-11-20 | 2004-03-30 | Surgi-Vision, Inc. | Connector and guidewire connectable thereto |
| US6871086B2 (en) * | 2001-02-15 | 2005-03-22 | Robin Medical Inc. | Endoscopic examining apparatus particularly useful in MRI, a probe useful in such apparatus, and a method of making such probe |
| WO2004038442A2 (en) * | 2002-10-21 | 2004-05-06 | The General Hospital Corporation D/B/A Massachusetts General Hospital | Catheter and radiofrequency coil with annular b1 filed |
-
2001
- 2001-07-12 JP JP2001212157A patent/JP3996359B2/ja not_active Expired - Fee Related
-
2002
- 2002-07-12 CN CNB028140133A patent/CN100350875C/zh not_active Expired - Fee Related
- 2002-07-12 WO PCT/JP2002/007105 patent/WO2003005902A1/ja active Application Filing
- 2002-07-12 EP EP02746007A patent/EP1410758A4/en not_active Withdrawn
- 2002-07-12 US US10/483,444 patent/US7653426B2/en not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5271400A (en) * | 1992-04-01 | 1993-12-21 | General Electric Company | Tracking system to monitor the position and orientation of a device using magnetic resonance detection of a sample contained within the device |
| JPH07210704A (ja) * | 1994-01-18 | 1995-08-11 | Hitachi Medical Corp | 三次元画像の構成方法 |
| EP0673621A1 (en) * | 1994-03-18 | 1995-09-27 | Schneider (Europe) Ag | A medical appliance for use in magnetic resonance imaging procedures |
| JPH0816813A (ja) * | 1994-06-24 | 1996-01-19 | Hitachi Medical Corp | 画像形成方法及び装置、表示方法及び表示装置 |
| US6171240B1 (en) * | 1996-12-05 | 2001-01-09 | Picker International, Inc. | MRI RF catheter coil |
| JPH10314137A (ja) * | 1997-05-20 | 1998-12-02 | Terumo Corp | カテーテル |
| JP2001070248A (ja) * | 1999-09-02 | 2001-03-21 | Toshiba Corp | 画像処理装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20050033164A1 (en) | 2005-02-10 |
| JP3996359B2 (ja) | 2007-10-24 |
| WO2003005902A1 (fr) | 2003-01-23 |
| EP1410758A1 (en) | 2004-04-21 |
| CN1527683A (zh) | 2004-09-08 |
| EP1410758A4 (en) | 2008-09-17 |
| JP2003024298A (ja) | 2003-01-28 |
| US7653426B2 (en) | 2010-01-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100350875C (zh) | 类内窥镜图像获取方法和使用该方法的磁共振成像设备 | |
| CN103006335B (zh) | 一种手术导航用的通用标定模及标定方法 | |
| CN101925333B (zh) | 用于脉管系统内的导管放置的集成系统 | |
| Song et al. | Development and preliminary evaluation of a motorized needle guide template for MRI-guided targeted prostate biopsy | |
| US20030220559A1 (en) | Fiducial markers for MRI | |
| CN103037761A (zh) | 用于针和医疗部件的插入引导系统 | |
| EP1103229A2 (en) | System and method for use with imaging devices to facilitate planning of interventional procedures | |
| CN103635146A (zh) | 用于插入引导系统的针长度确定和校准 | |
| JP6427488B2 (ja) | 磁気共鳴システム及び磁気共鳴方法 | |
| JP2003506118A (ja) | 内部mri受信コイルの3次元の位置及び向きを決定する方法 | |
| CA2505464A1 (en) | Catheter tracking with phase information | |
| US20090080750A1 (en) | Passive mr visualisation of interventional instruments | |
| CN115209829A (zh) | 用于活检的mri引导的机器人系统和方法 | |
| CN1424589A (zh) | 磁共振成像的方法和装置 | |
| Rea et al. | System for 3-D real-time tracking of MRI-compatible devices by image processing | |
| CN114732521B (zh) | 一种磁定位装置跟踪定位精度评估系统 | |
| CN101103914A (zh) | 磁共振系统与其引导的设备间的坐标系切换装置和方法 | |
| Shang et al. | A high accuracy multi-image registration method for tracking MRI-guided robots | |
| Sengupta | Modeling of active shimming of metallic needles for interventional MRI | |
| Thörmer et al. | Simultaneous 3D localization of multiple MR-visible markers in fully reconstructed MR images: proof-of-concept for subsecond position tracking | |
| CN203122607U (zh) | 一种手术导航用的通用标定模 | |
| Tuna et al. | Differential image based robot to MRI scanner registration with active fiducial markers for an MRI-guided robotic catheter system | |
| US20250067827A1 (en) | Systems and methods for interference signal collection and processing | |
| CN217561704U (zh) | 局部线圈以及由局部线圈和网格构成的系统 | |
| Görlitz et al. | Development and validation of a real-time reduced field of view imaging driven by automated needle detection for MRI-guided interventions |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20071128 Termination date: 20150712 |
|
| EXPY | Termination of patent right or utility model |