BR122019028274B1 - circuito de aspiração para um sistema de fluidos - Google Patents
circuito de aspiração para um sistema de fluidos Download PDFInfo
- Publication number
- BR122019028274B1 BR122019028274B1 BR122019028274-9A BR122019028274A BR122019028274B1 BR 122019028274 B1 BR122019028274 B1 BR 122019028274B1 BR 122019028274 A BR122019028274 A BR 122019028274A BR 122019028274 B1 BR122019028274 B1 BR 122019028274B1
- Authority
- BR
- Brazil
- Prior art keywords
- suction
- line
- irrigation
- valve
- ventilation
- Prior art date
Links
- 239000012530 fluid Substances 0.000 title claims abstract description 98
- 230000002262 irrigation Effects 0.000 claims abstract description 228
- 238000003973 irrigation Methods 0.000 claims abstract description 228
- 238000009423 ventilation Methods 0.000 claims abstract description 135
- 239000002699 waste material Substances 0.000 claims abstract description 7
- 238000004891 communication Methods 0.000 claims description 28
- 230000004044 response Effects 0.000 claims description 4
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 claims description 3
- 230000008859 change Effects 0.000 claims description 3
- 239000011780 sodium chloride Substances 0.000 claims description 2
- 230000000977 initiatory effect Effects 0.000 claims 2
- 238000006073 displacement reaction Methods 0.000 description 16
- 238000000034 method Methods 0.000 description 14
- 238000010586 diagram Methods 0.000 description 13
- 238000001802 infusion Methods 0.000 description 9
- 230000002572 peristaltic effect Effects 0.000 description 9
- 238000005086 pumping Methods 0.000 description 7
- 238000001356 surgical procedure Methods 0.000 description 7
- 208000002177 Cataract Diseases 0.000 description 5
- 230000009471 action Effects 0.000 description 4
- 239000003570 air Substances 0.000 description 4
- 239000013078 crystal Substances 0.000 description 4
- 210000004087 cornea Anatomy 0.000 description 3
- 229920001971 elastomer Polymers 0.000 description 3
- 239000000806 elastomer Substances 0.000 description 3
- 210000003128 head Anatomy 0.000 description 3
- 239000007788 liquid Substances 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 239000003978 infusion fluid Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 210000001525 retina Anatomy 0.000 description 2
- 238000001228 spectrum Methods 0.000 description 2
- 206010016760 Flat anterior chamber of eye Diseases 0.000 description 1
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000005534 acoustic noise Effects 0.000 description 1
- 239000012080 ambient air Substances 0.000 description 1
- 230000003466 anti-cipated effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000007812 deficiency Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 230000003292 diminished effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000001804 emulsifying effect Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000000338 in vitro Methods 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000037452 priming Effects 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 230000001012 protector Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000002207 retinal effect Effects 0.000 description 1
- 210000003786 sclera Anatomy 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images













Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting-in contact lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/007—Methods or devices for eye surgery
- A61F9/00736—Instruments for removal of intra-ocular material or intra-ocular injection, e.g. cataract instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting-in contact lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/007—Methods or devices for eye surgery
- A61F9/00736—Instruments for removal of intra-ocular material or intra-ocular injection, e.g. cataract instruments
- A61F9/00745—Instruments for removal of intra-ocular material or intra-ocular injection, e.g. cataract instruments using mechanical vibrations, e.g. ultrasonic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M1/00—Suction or pumping devices for medical purposes; Devices for carrying-off, for treatment of, or for carrying-over, body-liquids; Drainage systems
- A61M1/71—Suction drainage systems
- A61M1/72—Cassettes forming partially or totally the fluid circuit
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M1/00—Suction or pumping devices for medical purposes; Devices for carrying-off, for treatment of, or for carrying-over, body-liquids; Drainage systems
- A61M1/71—Suction drainage systems
- A61M1/74—Suction control
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M1/00—Suction or pumping devices for medical purposes; Devices for carrying-off, for treatment of, or for carrying-over, body-liquids; Drainage systems
- A61M1/71—Suction drainage systems
- A61M1/74—Suction control
- A61M1/742—Suction control by changing the size of a vent
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M1/00—Suction or pumping devices for medical purposes; Devices for carrying-off, for treatment of, or for carrying-over, body-liquids; Drainage systems
- A61M1/71—Suction drainage systems
- A61M1/77—Suction-irrigation systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M1/00—Suction or pumping devices for medical purposes; Devices for carrying-off, for treatment of, or for carrying-over, body-liquids; Drainage systems
- A61M1/84—Drainage tubes; Aspiration tips
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M3/00—Medical syringes, e.g. enemata; Irrigators
- A61M3/02—Enemata; Irrigators
- A61M3/0201—Cassettes therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M3/00—Medical syringes, e.g. enemata; Irrigators
- A61M3/02—Enemata; Irrigators
- A61M3/0279—Cannula; Nozzles; Tips; their connection means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M3/00—Medical syringes, e.g. enemata; Irrigators
- A61M3/02—Enemata; Irrigators
- A61M3/0279—Cannula; Nozzles; Tips; their connection means
- A61M3/0283—Cannula; Nozzles; Tips; their connection means with at least two inner passageways, a first one for irrigating and a second for evacuating
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2217/00—General characteristics of surgical instruments
- A61B2217/002—Auxiliary appliance
- A61B2217/005—Auxiliary appliance with suction drainage system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2217/00—General characteristics of surgical instruments
- A61B2217/002—Auxiliary appliance
- A61B2217/007—Auxiliary appliance with irrigation system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M1/00—Suction or pumping devices for medical purposes; Devices for carrying-off, for treatment of, or for carrying-over, body-liquids; Drainage systems
- A61M1/71—Suction drainage systems
- A61M1/77—Suction-irrigation systems
- A61M1/774—Handpieces specially adapted for providing suction as well as irrigation, either simultaneously or independently
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M1/00—Suction or pumping devices for medical purposes; Devices for carrying-off, for treatment of, or for carrying-over, body-liquids; Drainage systems
- A61M1/90—Negative pressure wound therapy devices, i.e. devices for applying suction to a wound to promote healing, e.g. including a vacuum dressing
- A61M1/91—Suction aspects of the dressing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/12—General characteristics of the apparatus with interchangeable cassettes forming partially or totally the fluid circuit
- A61M2205/128—General characteristics of the apparatus with interchangeable cassettes forming partially or totally the fluid circuit with incorporated valves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2210/00—Anatomical parts of the body
- A61M2210/06—Head
- A61M2210/0612—Eyes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M3/00—Medical syringes, e.g. enemata; Irrigators
- A61M3/02—Enemata; Irrigators
- A61M3/0233—Enemata; Irrigators characterised by liquid supply means, e.g. from pressurised reservoirs
- A61M3/0241—Enemata; Irrigators characterised by liquid supply means, e.g. from pressurised reservoirs the liquid being supplied by gravity
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M3/00—Medical syringes, e.g. enemata; Irrigators
- A61M3/02—Enemata; Irrigators
- A61M3/0233—Enemata; Irrigators characterised by liquid supply means, e.g. from pressurised reservoirs
- A61M3/0254—Enemata; Irrigators characterised by liquid supply means, e.g. from pressurised reservoirs the liquid being pumped
- A61M3/0258—Enemata; Irrigators characterised by liquid supply means, e.g. from pressurised reservoirs the liquid being pumped by means of electric pumps
Abstract
CIRCUITO DE ASPIRAÇÃO PARA UM SISTEMA DE FLUIDOS. Várias disposições de sistemas de fluídica são divulgados. Em uma disposição, um circuito de aspiração para um sistema de fluidos é divulgado o que seletivamente controla a aspiração. O circuito de aspiração compreende uma linha de aspiração operativamente conectada a um instrumento cirúrgico, uma linha de escape de aspiração operativamente conectada a um receptáculo de resíduos; uma linha de ventilação de aspiração conectada a uma primeira extremidade em uma linha de aspiração; e uma válvula de ventilação seletivamente variável operativamente conectada à linha de ventilação aspiração. A válvula de ventilação variável pode ser seletivamente movida para variar a pressão de aspiração dentro da linha de aspiração. Outros sistemas de fluídica são divulgados que incluem uma válvula de irrigação seletivamente posicionável que também pode ser incorporada em um sistema de fluidos que inclui uma válvula de abertura variável.
Description
[001] Este pedido reivindica o benefício da prioridade de Pedido de Patente Provisório. US. N° Serial 61/568.220 intitulado "Elementos de válvula seletivamente móveis para circuitos de aspiração e irrigação", depositado em 8 de dezembro de 2011, cujos inventores são Gary P. Sorensen, Michael D. Morgan e Mel M. Oliveira, a qual por meio deste é incorporada por referência, na sua totalidade como se totalmente e completamente estabelecido neste documento.
[002] A presente divulgação geralmente refere-se métodos e sistemas cirúrgicos. Mais especificamente, a presente divulgação refere-se sistemas e métodos para controlar fluxo de fluido em circuitos de aspiração e/ou irrigação durante um procedimento cirúrgico usando um ou mais elementos de válvula seletivamente móveis.
[003] O olho humano funciona para prover visão ao transmitir luz através de uma porção exterior clara chamada a córnea e com foco na imagem por meio da lente na retina. A qualidade da imagem focada depende de muitos fatores, incluindo o tamanho e o formato do olho e a transparência da córnea e lente.
[004] Quando a idade ou a doença faz com que a lente se torne menos transparente, a visão se deteriora por causa da luz diminuída, a qual pode ser transmitida para a retina. Esta deficiência na lente do olho é conhecida como uma catarata. Cirurgia oftálmica é requerida para tratar esta condição. Mais especificamente, remoção cirúrgica da lente deteriorada e substituição por uma lente intraocular artificial (IOL).
[005] Uma técnica conhecida para remoção de lentes de catarata é a facoemulsificação. Durante este procedimento, uma ponta de corte de facoemulsificação fina é inserida na lente doente e vibrada por meio de ultrassons. A ponta de corte vibrante liquidifica ou emulsifica a lente para que a lente doente pode ser aspirada fora do olho. Uma vez removida, uma lente artificial é inserida no mesmo.
[006] Um dispositivo cirúrgico ultrassônico típico adequado para procedimentos oftálmicos inclui um utensílio conduzido por meio de ultrassons, uma ponta de corte anexada, uma manga de irrigação e um console de controle eletrônico. A montagem de utensílio é anexada ao console de controle por um cabo elétrico e tubulação flexível. Através do cabo elétrico, o console varia o nível de potência transmitido pelo utensílio para a ponta de corte anexada e o tubo flexível alimenta fluido de irrigação para e retira fluido de aspiração de o olho através montagem de utensílio.
[007] A parte operativa do utensílio inclui uma barra de ressonância oca ou chifre diretamente anexado a um conjunto de cristais piezoeléctricos. Os cristais alimentam a vibração ultrassônica requerida necessária para conduzir ambos o chifre e a ponta de corte anexados durante facoemulsificação e são controlados pelo console. A montagem de cristal/chifre é suspensa dentro o corpo oco ou casca do utensílio. O corpo de utensílio termina em uma porção de diâmetro reduzido ou cone protetor de dianteira na extremidade distal do corpo. O cone protetor de dianteira aceita a manga de irrigação. Da mesma forma, o furo de chifre recebe a ponta de corte. A ponta de corte é ajustada para que a ponta se projete somente uma quantidade predeterminada após a extremidade aberta da manga de irrigação
[008] Em uso, as extremidades da ponta de corte e manga de irrigação são inseridas em uma pequena incisão de tamanho predeterminado na córnea, esclerótica ou outra localização do olho. A ponta de corte é ultrassonicamente vibrada ao longo do eixo longitudinal dentro da luva de irrigação pelo chifre ultrassônico de cristal dirigido, dessa forma, emulsionando o tecido selecionado no local. Um furo oco da ponta de corte se comunica com o furo no chifre, que por sua vez, se comunica com a linha de aspiração do utensílio para o console. Uma pressão reduzida ou fonte de vácuo no console extrai ou aspira o tecido emulsionado a partir do olho através da extremidade aberta da ponta de corte, através da ponta de corte e furos de chifre e através da linha de aspiração, em um dispositivo de coleção. A aspiração de tecido emulsionado é auxiliada por uma solução salina flush ou irrigante que é injetado no sítio cirúrgico através de um pequeno espaço anular entre superfície interior da manga de irrigação e a ponta de corte.
[009] Sistemas de facoemulsificação conhecidos podem ainda usar um cassete cirúrgico para prover uma variedade de funções para procedimentos cirúrgicos vitro retinianos para assistir com efetivamente gestão de fluxos de irrigação e aspiração dentro e fora do sítio cirúrgico através do dispositivo cirúrgico. Mais especificamente, o cassete atua como a interface entre a instrumentação cirúrgica e o paciente e proporciona fluxos pressurizados de irrigação e aspiração dentro e para fora do olho. Uma variedade de sistemas de bombeamento tem sido utilizada em conexão com um cassete cirúrgico em sistemas de fluídica para cirurgia de catarata, incluindo sistemas de deslocamento positivo (mais comumente, bombas peristálticas) e vácuo com base em fontes de aspiração. Um sistema peristáltico usa uma série de rolos agindo sobre um conduíte de elastomérico para criar fluxo na direção de rotação, enquanto sistemas com base em vácuo empregam uma fonte de vácuo, tipicamente aplicada ao fluxo de aspiração através de uma interface de ar-líquido.
[0010] Durante procedimentos cirúrgicos, a ponta ressoante, oca pode tornar-se obstruída com tecido. Em tal instância, vácuo pode construir na linha de aspiração a jusante de oclusão. Quando a oclusão eventualmente se desmembra, este vácuo reprimido pode, dependendo do nível de vácuo e da quantidade de conformidade de caminho de aspiração, extrair uma quantidade significativa de fluido do olho, aumentando assim o risco de câmara anterior rasa ou colapso. Esta situação é comumente referida como surto de intervalo de oclusão.
[0011] Para resolver esta preocupação, consoles cirúrgicos são configurados com sensores no caminho de aspiração para habilitar detecção de nível de vácuo e limitação de vácuo pelo sistema a um nível máximo pré-determinado. Enquanto limitando o nível máximo de vácuo de tal maneira pode ser eficaz para reduzir a magnitude de potencial de um surto de quebra de oclusão, tais limitações sobre o nível máximo de vácuo podem reduzir a eficácia da remoção de lentes e aumento geral de tempo cirúrgico. Em alguns sistemas, uma indicação audível de nível de vácuo relativo e/ou vácuo alcançando o limite predefinido de usuário pode ser provida para que o cirurgião possa tomar precauções apropriadas.
[0012] Por exemplo, em alguns sistemas, vácuo é comumente aliviado com um comando do cirurgião para abrir uma válvula de ventilação que conecta a linha de aspiração a uma fonte de pressão que é mantida em ou acima de pressão atmosférica. Dependendo do sistema, isso pode ser a linha de irrigação, a linha de escape da bomba ou uma linha conectada a ar atmosférico (sistema de ventilação de ar). Entretanto, existem algumas preocupações com válvulas de ventilação conhecidas. Primeiro, válvulas de ventilação conhecidas somente são configuradas para simples "ação ligada/desligada. Por exemplo, válvulas de tubos apertados ou válvulas de tipo de cúpula de elastômero podem prover controle de ligar/desligar de fluxo de fluido satisfatório, mas não exibem características de fluxo variável consistentes. Como tal, este tipo de válvula tem uma curva de recuperação de surto muito acentuada. Além disso, a configuração de válvulas do tipo de cúpula também pode apresentar desafios operacionais. Por exemplo, a operação da válvula é altamente dependente do material elastômero para obter uma posição de assento própria, assim, consistência do material é muito importante. Além disso, o fluxo através da válvula também pode se tornar entupido por detritos se a abertura formada pelo elastômero é pequena. Além disso, tal configuração indesejavelmente pode reter bolhas de ar. Uso desses tipos de válvulas também é limitado em que devido à natureza da limitação de controle de fluxo de liga/desliga, uma matriz de válvulas é necessária para suportar dirigir fluxo de fluido de um circuito para outro.
[0013] Alternativamente, vácuo pode ser reduzido ou aliviado por inversão da rotação da bomba em sistemas de deslocamento positivo. Enquanto é conhecido empregar um sistema tendo rotação de bomba bidirecional para habilitar controle de nível de pressão/vácuo, com base em entrada e retorno de usuário de um sensor de pressão na linha de aspiração tal como um sistema requer rápida aceleração e desaceleração da massa de cabeça de bomba. Isso pode limitar tempo de resposta e causar ruído acústico repreensível.
[0014] Cassetes conhecidos usados com consoles também habilitam à linha de aspiração ser ventilada, para a atmosfera ou para um líquido, a fim de reduzir ou eliminar surto de vácuo acerca de pausa de oclusão. Estado da técnica de cassetes ventilados a ar habilita o ar ambientes entrar na linha de aspiração, entretanto, ventilação de ar na linha de aspiração muda o desempenho fluídico do sistema de aspiração, aumentando grandemente a conformidade do caminho de aspiração. Conformidade aumentada pode aumentar significativamente a magnitude de surto de intervalo de oclusão e também negativamente afetar resposta do sistema. Sistemas de ventilação líquidos habilitam fluido de irrigação a sangrar na linha de aspiração, reduzindo, assim, qualquer impacto sobre o desempenho fluídico do sistema de aspiração. Quando são utilizados vácuos de aspiração mais elevados, cassetes que ventilam a linha de aspiração à linha de irrigação podem causar surtos de alta pressão na linha de irrigação. Outros sistemas proveem uma fonte separada de fluido de irrigação para ventilar a linha de aspiração, requerendo o uso de duas fontes de fluido de irrigação e aumentando o custo e a complexidade do sistema.
[0015] Várias disposições de sistemas de fluídica são divulgadas. Em uma disposição exemplar, um circuito de aspiração para um sistema de fluidos é proposto que seletivamente controla aspiração. Por exemplo, circuito de aspiração exemplar compreende uma linha de aspiração operativamente conectada a um instrumento cirúrgico, uma linha de escape de aspiração operativamente conectada a um receptáculo de resíduos; uma linha de ventilação de aspiração conectada a uma primeira extremidade para a linha de aspiração; e uma válvula de ventilação seletivamente variável operativamente conectada à linha de ventilação aspiração. A válvula de ventilação variável pode ser seletivamente atuada para variar pressão de aspiração dentro da linha de aspiração. Em outra disposição exemplar, a válvula de ventilação variável é configurada como uma válvula de múltiplos propósitos que pode variar pressão de aspiração e seletivamente interromper o fluxo de fluido de irrigação. Em ainda outra disposição exemplar, a válvula de ventilação variável é configurada como uma válvula de múltiplos propósitos que pode variar pressão de aspiração, bem como aspiração direta de ou uma fonte de aspiração baseada em deslocamento e/ou baseada em vácuo.
[0016] Modalidades exemplares da presente divulgação serão agora descritas por meio de exemplo, em mais detalhes com referência às figuras anexadas, nas quais:
[0017] Figura 1 é uma visão transversal de uma disposição exemplar de uma bomba peristáltica usada em uma máquina de facoemulsificação para procedimentos oftalmológicos.
[0018] Figura 2 é uma vista em perspectiva de um console cirúrgico que pode ser usado em uma máquina de facoemulsificação.
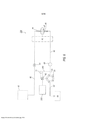
[0019] Figura 3 é um diagrama esquemático de uma disposição exemplar de um sistema de fluidos de faco para uma máquina de facoemulsificação tendo válvula de ventilação seletivamente variável disposta entre uma linha de aspiração e uma linha de escape de aspiração.
[0020] Figura 4 é uma visão transversal de uma configuração exemplar de uma válvula de ventilação variável para uso em um sistema de fluidos de faco.
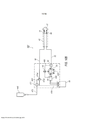
[0021] Figura 5 é um diagrama esquemático de uma disposição exemplar de um sistema de fluidos de faco para uma máquina de facoemulsificação tendo válvula de ventilação seletivamente variável disposta entre uma linha de aspiração e uma linha de escape de aspiração e atmosfera.
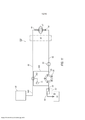
[0022] Figura 6 é um diagrama esquemático de uma disposição exemplar de um sistema de fluidos de faco para uma máquina de facoemulsificação tendo válvula de ventilação seletivamente variável disposta entre uma linha de aspiração e uma linha de escape de aspiração e uma fonte de pressão de ventilação.
[0023] Figura 7 é um diagrama esquemático de uma disposição exemplar de um sistema de fluidos de faco para uma máquina de facoemulsificação tendo válvula de ventilação seletivamente variável disposta entre uma linha de aspiração e uma linha de irrigação.
[0024] Figura 8 é um diagrama esquemático de uma disposição exemplar de um sistema de fluidos de faco para uma máquina de facoemulsificação tendo válvula de ventilação seletivamente variável disposta entre uma linha de aspiração e uma linha de escape de aspiração, e uma válvula de irrigação de multiposição.
[0025] Figura 9A é uma visão transversal de uma válvula de irrigação variável para uso no sistema de fluidos de faco de Figura 8.
[0026] Figura 9B é uma visão transversal de uma válvula de irrigação exemplar alternativa para uso em um sistema de fluidos de faco.
[0027] Figura 10A é um diagrama esquemático de uma disposição exemplar de um sistema de fluidos de faco para uma máquina de facoemulsificação incorporando a válvula de irrigação de multiposição de Figura 9B em uma 'posição desligada.
[0028] Figura 10B é um diagrama esquemático de uma disposição exemplar de um sistema de fluidos de faco para uma máquina de facoemulsificação incorporando a válvula de irrigação de multiposição de Figura 9B em uma posição "de irrigação".
[0029] Figura 10C é um diagrama esquemático de uma disposição exemplar de um sistema de fluidos de faco para uma máquina de facoemulsificação incorporando a válvula de irrigação de multiposição de Figura 9B em uma posição de "desvio".
[0030] Figura 11 é um diagrama esquemático de uma disposição exemplar de um sistema de fluidos de faco para uma máquina de facoemulsificação tendo uma válvula de multipropósitos disposta entre uma linha de aspiração e uma linha de irrigação.
[0031] Figura 12A é uma vista em perspectiva parcialmente explodida de uma válvula multipropósito exemplar e um cassete cirúrgico para uso no sistema de fluidos de faco de Figura 11.
[0032] Figura 12B é uma visão transversal da válvula multipropósito tomada ao longo de linhas 12B-12B em Figura 12A.
[0033] Figura 13 é um diagrama esquemático parcial de um circuito de aspiração para uma disposição exemplar de um sistema de fluidos de faco que emprega um sistema de bomba de multi aspiração usando ambos sistemas de bomba peristáltica e venturi.
[0034] Figura 14A é um diagrama esquemático de uma configuração exemplar de uma válvula multipropósito em uma posição totalmente aberta entre a linha de aspiração e uma porta de entrada da bomba, tal que a pressão de vácuo completo é entregue através da linha de aspiração para o utensílio.
[0035] Figura 14B é um diagrama esquemático da válvula multipropósito em uma oposição aberta parcialmente entre a linha de aspiração e a linha de escape de aspiração, bem como entre a linha de aspiração e uma porta de entrada da bomba.
[0036] Figura 14C é um diagrama esquemático da válvula multipropósito na posição totalmente aberta com o reservatório de venturi tal que aspiração é direcionada do mesmo.
[0037] Referindo-se agora à discussão que se segue e também para as figuras, abordagens ilustrativas para os dispositivos e métodos divulgados são mostradas em detalhes. Embora as Figuras representem possíveis algumas abordagens, as figuras não estão necessariamente em escala e certas características podem ser exageradas, removidas ou parcialmente seccionadas para melhor ilustrar e explicar a presente divulgação. Adicionalmente, o conjunto de descrições estabelecidos adiante no presente documento não pretende ser exaustivo ou de outra forma limitar ou restringir as reivindicações aos formatos precisos com as configurações mostradas nos desenhos e divulgadas na seguinte descrição detalhada.
[0038] Máquinas de facoemulsificação são tipicamente utilizadas em cirurgia de catarata de olho para remover lentes de olho afetado por catarata, tais máquinas tipicamente empregam sistemas de fluídica para introduzir fluido irrigativo no sítio cirúrgico, bem como prover aspiração do sítio cirúrgico para remover tecido emulsionado. Em alguns sistemas conhecidos um sistema de deslocamento positivo, como uma bomba, é empregado para prover aspiração apropriada. Referindo-se a Figura 1, uma disposição exemplar de uma bomba 20 para um sistema de facoemulsificação é mostrada. Bomba 20 inclui um motor de bomba 22 e uma cabeça de rolo 24 contendo um ou mais rolos 26. Bomba 20 pode ser usada em combinação com um cassete 28 tendo uma folha elastomérica 30 aplicada ao exterior de um corpo relativamente rígido ou substrato 32. Motor de bomba 22 pode ser um passo a passo ou motor auxiliar de DC. Cabeça de rolo 24 é anexada a uma haste 34 de motor de bomba 22 tal que motor de bomba 22 rotaciona cabeça de rolo 24 em um plano geralmente perpendicular ao eixo A-A de haste 34. Haste 34 também pode conter um codificador de posição de Haste 36.
[0039] Folha 30 de cassete 28 contém um canal de fluido 38 que pode ser moldado no mesmo, canal 38 sendo configurado para ser geralmente em forma planar e arqueado (dentro do plano). Canal de fluido 38 tem um raio de aproximação de rolos 26 sobre haste 34.
[0040] Cassete 28 é projetado para ser montado em um receptor de cassete 36 de um console 40 (como mostrado em Figura 2). Cassete 28 operativamente acopla console 40 para um utensílio 42 (uma disposição esquemática exemplar de utensílio 42 é mostrada na Figura 3). Utensílio 42 geralmente inclui uma manga de infusão 44 e um membro de ponta 46, pelo qual membro de ponta 46 é posicionado coaxialmente dentro de manga de infusão 44. Membro de ponta 46 é configurado para inserção em um olho, 47. Manga de infusão 44 permite que fluido de irrigação flua do console 40 e/ou cassete 28 dentro do olho. Fluido de aspiração também pode ser retirado através de um lúmen de membro de ponta 46, com console 40 e cassete 28 geralmente provendo aspiração/vácuo ao membro de ponta 46. Coletivamente, as funções de irrigação e aspiração do sistema de facoemulsificação 10 são por este meio referidas como um sistema de fluidos de faco 11.
[0041] Referindo-se agora a Figura 3, um sistema de fluidos de faco exemplar 11 será descrito para uso com um sistema de deslocamento positivo (ou seja, bomba 20). Manga de infusão 44 de utensílio 42 é conectada a uma fonte de irrigação 48, a qual contém um fluido de irrigação, pela tubagem adequada (isto é, linha de irrigação 50). Em uma disposição exemplar, fonte de irrigação 48 pode ser uma fonte de irrigação pressurizada (por exemplo, um saco de fluido de irrigação que é seletivamente compactado para entregar fluido de irrigação para uma linha de alimentação de irrigação). Membro de ponta 46 é conectado a uma porta de entrada 53 de uma bomba, tal como bomba 20, por um comprimento de um tubo adequado (ou seja, linha de aspiração 52).
[0042] Uma linha de escape de aspiração 54 estende-se a partir de bomba 20. Em uma disposição exemplar, linha de escape de aspiração 54 está fluidicamente conectada a um reservatório de linha de dreno 56. Reservatório 56 também pode drenar em um saco de drenagem opcional 58. Alternativamente, conforme mostrado no espectro, linha de escape 54' pode ser conectada fluidicamente diretamente para drenar saco 58.
[0043] Uma linha de ventilação de aspiração 60 está fluidicamente conectada entre uma linha de aspiração 52 e linha de escape de aspiração 54. Linha de ventilação 60 é configurada como um circuito de passagem secundária. Uma válvula de ventilação 62, a ser discutida em mais detalhes abaixo, é fluidicamente conectada a linha de ventilação de aspiração 60 a fim de controlar seletivamente a pressão de aspiração dentro da linha de aspiração 52. Um sensor de pressão 63 está também em comunicação fluida com linha de aspiração 52 para detectar pressão de aspiração dentro de linha de aspiração 52. Sensor de pressão 63 operativamente também está conectado a um sistema de controle em console 40. O sistema de controle pode ser configurado para prover níveis de pressão de aspiração predefinidos para sistema de fluidos 11, como será explicado em mais detalhes abaixo.
[0044] Como descrito acima, fonte de irrigação 48, a qual pode ser pressurizada, é ligado fluidicamente para utensílio 42 por linha de irrigação 50. Uma válvula de irrigação 64 é conectada fluidicamente a e posicionada entre linha de irrigação 50 e manga de infusão 44. Válvula de irrigação 64 provê controle de fluido de irrigação de ligar/desligar seletivo em linha de irrigação 50.
[0045] Válvula de ventilação 62 é configurada para prover um tamanho de orifício variável dentro da linha de ventilação 60 para modular seletivamente aspiração dentro de linha de aspiração 52. Mais especificamente, uso de uma válvula de ventilação variável 62 habilita rotação unidirecional de bomba 20 em uma primeira direção para gerar fluxo/vácuo, permitindo um mecanismo para controlar dinamicamente pressão de aspiração para utensílio 42. Em uma válvula de ventilação exemplar 62 pode ser configurada como uma válvula tipo rotatória multiposição que permitiria previsível e preciso controle do tamanho de orifício com base em posição angular de válvula de ventilação 62, dentro de linha de ventilação 60.
[0046] Uma configuração exemplar de válvula de ventilação 62 é mostrada em Figura 4. Na Figura 4, em uma configuração exemplar, válvula de ventilação de multiposição 62 inclui um canal 66 definido por primeira e segunda aberturas 68 e 69. Enquanto canal 66 é mostrado em Figura 4 como sendo geralmente uniformemente dimensionado a partir de primeira abertura 68 para segunda abertura 69, entende-se que canal 66 pode ser configurado com um tamanho variável. Por exemplo, primeiras 68 e segundas aberturas 69 podem ser configuradas com um diâmetro que é maior que uma porção central de canal 66 tais que primeiras e segundas aberturas 68 e 69 alargam exteriormente em direção a uma periferia 70 de válvula de ventilação 62.
[0047] Em operação, válvula de ventilação 62 é seletivamente rotativo em um circuito de aspiração, tal que a posição angular de canal 68 é seletivamente móvel dentro de linha de ventilação 60. Tal movimento pode completar abertura, parcialmente ocluir e/ou completamente ocluir, primeira e segunda abertura 68 e 69, a fim de controlar seletivamente a pressão de aspiração dentro da linha de aspiração 52.
[0048] Sensor de pressão 63 operativamente está conectado a um sistema de controle montado em console 40. Sensor de pressão 63 detecta e comunica mudanças de pressão em linha de aspiração 52 durante operação da máquina de facoemulsificação. Em uma configuração exemplar, limiares predeterminados de pressão podem ser definidos dentro do sistema de controle tal que quando leituras de pressão de sensor de pressão 63 excederem aqueles limiares, o sistema de controle seletivamente pode modificar a pressão de aspiração dentro de linha de aspiração 52. Por exemplo, se o sensor de pressão 63 detecta que a pressão de aspiração excedeu o limiar de pressão predeterminado, console 40 dispara movimento de válvula de ventilação 62 dentro da linha de ventilação 60 por uma quantidade predeterminada para permitir a ventilação de linha de aspiração 52 suficiente para soltar a pressão de aspiração abaixo do limiar preestabelecido. Assim, sensor de pressão 63, válvula de ventilação 62 e o sistema de controle de sensor de pressão cooperar para permitir modulação em tempo real de aspiração dentro da linha de aspiração 52 que permite um maior nível de aspiração máxima a ser utilizado, mas ainda provê surtos de quebra de oclusão eficazes.
[0049] Por exemplo, referindo-se de volta a Figura 3, canal 66 da válvula de ventilação 62 é posicionado tal que as primeiras e segundas aberturas 68 e 69 estão posicionadas fora do alinhamento com a linha de ventilação 60. Nesta posição, a válvula de ventilação 62 está em posição "totalmente fechada" dessa forma bloqueando linha de ventilação 60 e provendo pressão de aspiração desimpedida para linha de aspiração 52. Se sensor de pressão 63 detecta que pressão de aspiração aumentou dentro de linha de aspiração 52 acima do nível de limiar, válvula de ventilação 62 pode ser seletivamente movida por uma quantidade predeterminada, a fim de mover primeiras e segundas aberturas 68 e 69 em alinhamento pelo menos parcial, abrindo desse modo parcialmente linha de escape de aspiração 54/54'. Esta ação rápida e eficazmente restaura a pressão de aspiração dentro da linha de aspiração 52 para uma quantidade predeterminada aceitável, sem requerer reversão de bomba. Entretanto, entende-se que, devido à configuração de canal 66, uma variedade de pressões de aspiração pode ser alcançada pelo movimento seletivo da válvula de ventilação 62.
[0050] Válvula de ventilação 62 está operativamente conectada a um atuador, tais como um motor 71, tendo um codificador de posição angular (tais como codificador 36). Um tal motor exemplar 71 inclui um motor de passo. Quando sensor de pressão 63 detecta que pressão de aspiração excedeu um limiar predeterminado, o controlador automaticamente pode operar motor 71 rotacionar válvula de ventilação 62 para uma posição angular predeterminada, mudando rapidamente, assim, pressão de aspiração dentro de linha de aspiração 52. Adicionalmente, o controlador, em cooperação com um sensor de pressão posicionado em linha de irrigação 50, pode ser configurado para detectar e minimizar um começo de quebra de oclusão. Mais especificamente, válvula de ventilação 62 pode ser rotacionada automaticamente por motor 71 para pressão de aspiração reduzida dentro de linha de aspiração 52. Esta função operaria para diminuir um efeito de um surto de quebra de oclusão secundário. Porque válvula de ventilação 62 permite controle seletivo e dinâmico de níveis de aspiração dentro de linha de aspiração 52, níveis de vácuo podem ser facilmente modulados para a preferência do usuário, proporcionando dessa forma remoção de lente mais rápida e mais eficiente.
[0051] Referindo-se agora a Figura 5, componentes de uma alternativa de sistema de fluidos de faco exemplar 100 para uso com um sistema de bombeamento de deslocamento positivo é mostrado. Sistema de fluidos de faco 100 inclui muitos dos mesmos componentes como mostrado e descrito acima em conexão com Figura 3. Nesse sentido, como componentes foram dados os mesmos números de referência. Para uma descrição daqueles componentes, é feita referência à discussão acima com respeito a Figura 3.
[0052] Em sistema de fluidos de faco 100, uma linha de escape de aspiração 54' se estende a partir de bomba 20 e é fluidicamente conectada a um saco de drenagem 58. Alternativamente, como mostrado em Figura 3, sistema de fluidos de faco 100, pode incluir uma linha de escape de aspiração 54 que é fluidicamente conectada a um reservatório de linha de drenagem.
[0053] Uma linha de ventilação de aspiração 160 está fluidicamente conectada entre uma linha de aspiração 52 e atmosfera 102. Uma válvula de ventilação variável 62 está fluidicamente conectada a linha de ventilação de aspiração 160 a fim de controlar seletivamente a pressão de aspiração dentro da linha de aspiração 52. Sensor de pressão 63 está também em comunicação fluida com linha de aspiração 52.
[0054] Como discutido acima, a válvula de ventilação 62 é configurada para prover um tamanho de orifício variável para modular seletivamente vácuo, permitindo dessa forma rotação unidirecional da bomba 20 para gerar fluxo/vácuo, enquanto permitindo o controle seletivo de aspiração/vácuo para utensílio 42 com base em posição angular de válvula de ventilação 62. Válvula de ventilação 62 é configurada para ser seletivamente rotacionável para dinamicamente controlar aspiração dentro de linha de aspiração 52.
[0055] Como discutido acima, em operação, sensor de pressão 63 operativamente está conectado a um sistema de controle montado em console 40. Sensor de pressão 63 detecta e comunica mudanças de pressão em linha de aspiração 52 durante operação da máquina de facoemulsificação. Em uma configuração exemplar, limiares de pressão predeterminados são definidos pelos usuários dentro do sistema de controle. Conformemente, quando sensor de pressão 63 detecta um nível de pressão de aspiração que excede os limiares preestabelecidos, o sistema de controle move válvula de ventilação 62 por uma quantidade predeterminada para reduzir a pressão de aspiração dentro de linha de aspiração 52 posicionando canal 66 em válvula de ventilação 62, em comunicação, pelo menos parcial com atmosfera 102. Entende-se também que aquela válvula de ventilação 62 pode ser totalmente aberta para atmosfera 102 para ventilar efetivamente totalmente linha de aspiração 52. Entende-se também que válvula de ventilação 62 pode ser seletivamente movida para fechar totalmente linha de ventilação 160 para atmosfera 102, desse modo efetivamente, provendo pressão de aspiração/vácuo completa em linha de aspiração 52 de membro de ponta 46. Movimento de válvula de ventilação 62 para seletivamente, ajustar a pressão de aspiração dentro de linha de aspiração 52 pode ser cumprido tanto manualmente (por exemplo, operação seletiva de um pedal de interruptor de pé com base nas configurações de usuário anteriores) ou automaticamente por motor 71 que está operativamente conectado ao sistema de controle.
[0056] Referindo-se agora a Figura 6, os componentes de uma outra alternativa de sistema de fluidos de faco 200 para uso com um sistema de bombeamento de deslocamento positivo são mostrados. Sistema de fluidos de faco 200 inclui muitos dos mesmos componentes como mostrado e descrito acima em conexão com Figuras 3 e 5. Nesse sentido, como componentes foram dados os mesmos números de referência. Para uma discussão detalhada daqueles componentes, é feita referência à discussão acima com respeito a Figura 3.
[0057] Uma linha de ventilação de aspiração 260 está fluidicamente conectada entre uma linha de aspiração 52 e uma fonte de pressão de ventilação 202. Exemplos de fontes de pressão de ventilação adequada incluem, mas não estão limitados a um fluido pressurizado ou salino. Válvula de ventilação variável 62 está fluidicamente conectada a linha de ventilação de aspiração 260 a fim de controlar seletivamente pressão de aspiração dentro de linha de aspiração 52. Sensor de pressão 63 está também em comunicação fluida com linha de aspiração 52.
[0058] Válvula de ventilação 62 é configurada para prover um tamanho de orifício variável para modular seletivamente vácuo, permitindo dessa forma rotação unidirecional da bomba 20 em uma primeira direção para gerar fluxo/vácuo, enquanto permitindo controle seletivo de aspiração/vácuo para utensílio 42 com base na posição angular de válvula de ventilação 62.
[0059] Sensor de pressão 63 é operativamente ligado a um sistema de controle montado em console 40 e detecta e comunica mudanças de pressão em linha de aspiração 52 durante operação da máquina de facoemulsificação. Em uma configuração exemplar, limiares predeterminados de pressão são definidos dentro do sistema de controle tal que quando leituras de pressão de sensor de pressão 63 excederem aqueles limiares, válvula de ventilação 62 é movida por uma quantidade predeterminada para reduzir a pressão de aspiração dentro de linha de aspiração 52. Isto é cumprido ao posicionar canal 66 em válvula de ventilação 62, pelo menos em comunicação parcial, com uma fonte de pressão de ventilação 202, abrindo assim linha de ventilação 260, e permitindo que fluido pressurizado (por exemplo) entre em linha de aspiração 52. Motor 71 pode ser operativamente conectado a válvula de ventilação 62 para mover automaticamente válvula de ventilação 62, por uma quantidade predeterminada para controlar automaticamente o nível de pressão de aspiração/vácuo em linha de aspiração 52 com base em informação recebida de sensor 63. É entendido também que válvula de ventilação 62 pode ser totalmente aberta para fonte de pressão de ventilação 202 para efetivamente negar pressão de aspiração em linha de aspiração 52, sem necessidade de interromper operação de bomba 20. Alternativamente, também é entendido que válvula de ventilação 62 pode ser totalmente fechada, isto é, canal 66 sendo posicionado completamente fora de alinhamento com linha de ventilação 260, tal que fonte de pressão de ventilação 202 não está em comunicação com linha de ventilação 260. Esta configuração efetivamente provê pressão de aspiração/vácuo completa em linha de aspiração 52 para membro de ponta 46.
[0060] Referindo-se agora a Figura 7, componentes de ainda uma outra alternativa de sistema de fluidos de faco 300 para uso com um sistema de bombeamento de deslocamento positivo é mostrado. Sistema de fluidos de faco 300 inclui muitos dos mesmos componentes como mostrado e descrito acima em conexão com Figuras 3 e 5-6. Nesse sentido, como componentes foram dados os mesmos números de referência. Para uma discussão detalhada daqueles componentes, é feita referência à discussão acima com respeito a Figura 3.
[0061] Uma linha de ventilação de aspiração 360 está fluidicamente conectada entre uma linha de aspiração 52 e linha de irrigação 50. Válvula de ventilação variável 62 está fluidicamente conectada a linha de ventilação de aspiração 360 a fim de controlar seletivamente pressão de aspiração dentro de linha de aspiração 52. Um sensor de pressão 63 está também em comunicação fluida com linha de aspiração 52.
[0062] Válvula de ventilação 62 é configurada para prover um tamanho de orifício variável para modular seletivamente vácuo, permitindo dessa forma rotação unidirecional ininterrupta da bomba 20 em uma primeira direção para gerar fluxo/vácuo, enquanto permitindo controle seletivo de aspiração/vácuo para utensílio 42 com base na posição angular de válvula de ventilação 62.
[0063] Sensor de pressão 63 é operativamente ligado a um sistema de controle montado em console 40 e detecta e comunica mudanças de pressão em linha de aspiração 52 durante operação da máquina de facoemulsificação. Em uma configuração exemplar, limiares predeterminados de pressão são definidos dentro do sistema de controle tal que quando leituras de pressão de sensor de pressão 63 excederem aqueles limiares, válvula de ventilação 62 pode ser seletivamente movida por uma quantidade predeterminada para reduzir, por exemplo, a pressão de aspiração dentro de linha de aspiração 52. Por exemplo, canal 66 em válvula de ventilação 62 é movido a fim de estar pelo menos em alinhamento parcial com linha de ventilação 360, dessa forma colocando linha de aspiração 52 em pelo menos comunicação parcial com linha de irrigação 50 por uma quantidade predeterminada para controlar automaticamente o nível de pressão de aspiração/vácuo em linha de aspiração 52 com base em informações recebidas de sensor 63. É entendido que válvula de ventilação 62 pode ser totalmente aberta para linha de irrigação 50 para efetivamente negar pressão de aspiração em linha de aspiração 52. Alternativamente, entende-se também que válvula de ventilação 62 pode ser posicionada para fechar totalmente linha de ventilação 50, provendo dessa forma, pressão de aspiração/vácuo completa em linha de aspiração 52 para membro de ponta 46. Em tal configuração, canal 66 está totalmente alinhado com linha de ventilação 360.
[0064] Referindo-se agora a Figura 8, os componentes de ainda uma outra alternativa de sistema de fluidos de faco 400 para uso com um sistema de bombeamento de deslocamento positivo são mostrados. Sistema de fluidos de faco 400 inclui muitos dos mesmos componentes como mostrado e descrito acima em conexão com Figuras 3, e 5-7.
[0065] Sistema de fluidos de faco 400 inclui manga de infusão 44 de utensílio 42 que é conectado a uma fonte de irrigação 448 por linha de irrigação 50. Sistema de fluidos de faco 400 também pode incluir uma válvula de irrigação de multiposição 464 que é conectada fluidicamente e posicionada em uma junção de três vias entre uma linha de alimentação de irrigação 473, linha de irrigação 50 e uma linha de desvio 476. Um sensor de pressão de linha de irrigação 475 pode ser posicionado em linha de irrigação 50 entre linha de desvio 476 e manga de infusão 42. Utensílio 42 também pode ser provido com um sensor de pressão de utensílio 443.
[0066] Enquanto fonte de irrigação 448 pode ser qualquer fonte de irrigação adequada, em uma disposição exemplar, fonte de irrigação 448 é pressurizada. Mais especificamente, um saco de irrigação 449 pode ser provido que está posicionado contra uma plataforma 451 e uma força de pressurização, representada por setas 453, é aplicada ao saco de irrigação 449 a fim de forçar fluido de infusão para fora de saco de irrigação 449 e para dentro de linha de alimentação de irrigação 473. Outros sistemas de fluidos pressurizados também são contemplados.
[0067] Membro de ponta 46 é conectado à porta de entrada 53 de uma bomba peristáltica 420 por linha de aspiração 52. Enquanto qualquer disposição de bomba adequado pode ser utilizado, em uma configuração exemplar, bomba 420 é uma bomba, tal como descrito em Publicação de Pedido de Patente E.U. N° 20100286651, intitulado "Cassete e Bomba Peristáltica Segmentada Múltipla" ou uma bomba como descrita em Patente de E.U. no. 6.962.488, intitulada "Cassete Cirúrgico tendo um Sensor de Pressão de Aspiração, os conteúdos de ambos os quais são incorporados por referência, em sua totalidade. Linha de escape de aspiração 54 se estende de bomba 420 e é conectada fluidicamente a um reservatório de ventilação 456. Reservatório de ventilação 546 é fluidicamente conectado a um saco de drenagem 58.
[0068] Uma linha de ventilação de aspiração 460 é conectada fluidicamente entre linha de aspiração 52 reservatório de ventilação 456 bem como a bomba de passagem secundária 420. Válvula de ventilação variável 62 está fluidicamente conectada a linha de ventilação de aspiração 460 a fim de controlar seletivamente pressão de aspiração dentro de linha de aspiração 52. Um sensor de pressão de aspiração 63 está também em comunicação fluida com linha de aspiração 52. Válvula de ventilação 62 é configurada para prover um tamanho de orifício variável dentro de linha de ventilação 460 para modular seletivamente vácuo, permitindo dessa forma rotação unidirecional da bomba 420 em uma primeira direção para gerar fluxo/vácuo, enquanto permitindo controle seletivo de aspiração/vácuo para utensílio 42 com base na posição angular de válvula de ventilação 62.
[0069] Em operação, sensor de pressão 63 operativamente está conectado a um sistema de controle montado em console 40. Sensor de pressão 63 detecta e comunica mudanças de pressão em linha de aspiração 52 durante operação da máquina de facoemulsificação. Em uma configuração exemplar, limiares predeterminados de pressão são definidos dentro do sistema de controle tal que quando leituras de pressão de sensor de pressão 63 excederem aqueles limiares, válvula de ventilação 62 pode ser seletivamente movida por uma quantidade predeterminada para reduzir a pressão de aspiração dentro de linha de aspiração 52. Isso é cumprido posicionando canal 66 em válvula de ventilação 62, em pelo menos comunicação parcial com linha de ventilação 460. Porque linha de ventilação 460 é operativamente conectada a reservatório de ventilação 456, a comunicação parcial do canal 66 com linha de ventilação 460 reduz eficazmente pressão de aspiração dentro de linha de aspiração 52. Movimento da válvula de ventilação 62 pode ser cumprido por motor 71 que é conectado a válvula de ventilação 62. Mais especificamente, motor 71 pode ser configurado para automaticamente mover válvula de ventilação 62 por uma quantidade predeterminada para controlar automaticamente o nível de pressão de aspiração/vácuo em linha de aspiração 52 com base em informação recebida de sensor 63. Entende-se que válvula de ventilação de 62 pode ser orientada para uma posição totalmente aberta para totalmente ventilar linha de aspiração para reservatório de ventilação 456 para efetivamente fechar porta de entrada 53 para bomba 420. Alternativamente, também se entende essa válvula de ventilação 62 pode ser totalmente fechada, ou seja, tal que canal 66 está fora de alinhamento com linha de ventilação 460, fechando assim, reservatório de ventilação 456 para linha de aspiração 52, efetivamente provendo pressão de aspiração/vácuo completa em linha de aspiração 52 de membro de ponta 46.
[0070] Como estabelecido acima, sistema de fluidos de faco 400 também provê uma válvula de irrigação de multiposição 464 que é posicionada em uma junção linha de alimentação de irrigação 473, linha de irrigação 50 e linha de desvio 476. Conforme explicado em detalhes adicionais abaixo, válvula de irrigação 464 é configurada como uma válvula rotativa que pode ser posicionada operativamente para controlar seletivamente irrigação em sistema de fluidos de faco 400. Conforme mostrado em Figura 9A, em uma disposição exemplar, válvula de irrigação de multiposição 464 inclui uma configuração de canal de interseção 474. Mais especificamente, canal 474 inclui uma primeira ramificação 474A, uma segunda ramificação 474B e uma terceira ramificação 474 C. Enquanto mostrado como tendo uma configuração em forma de T, entende-se que outras configurações que se cruzam podem ser utilizadas, dependendo da configuração das várias linhas de fluido em sistema de fluidos 400.
[0071] Em operação, como mostrado na Figura 8, quando válvula de irrigação 464 é orientada que primeira ramificação 474A está totalmente alinhada com linha de alimentação de irrigação 473 e terceira ramificação 474B está totalmente alinhada com produtos de ramificação 50, mas segunda ramificação 474C é orientada para fora de alinhamento com linha de desvio 476, normal, fluxo de irrigação completo é provido a linha de irrigação 50. Entretanto, para primordial fonte de irrigação 448 de sistema de fluidos de faco 400, válvula de irrigação 464 pode ser seletivamente rotacionada tal que primeira ramificação 474A está totalmente alinhada com linha de desvio 476 e terceira ramificação 474C está totalmente alinhada com linha de alimentação de irrigação 473. Nesse sentido, quando sistema de fluidos de faco 400 é operado, fluido de alimentação de irrigação 448 é direcionado para esvaziar saco de drenagem 58. Para sensor de pressão de irrigação primordial 475, válvula de irrigação 464 pode ser seletivamente rotacionada tal que segundo braço 474B está totalmente alinhado com linha de desvio 476 e terceiro braço 474C está totalmente alinhado com linha de irrigação 50.
[0072] Enquanto as várias ramificações de válvula de irrigação 464 mostradas em Figura 8 foi descrito como operando a fim de ser totalmente alinhado com qualquer linha de irrigação 50, linha de desvio 476 e linha de alimentação de irrigação 473, também subentende-se que ramificações 474a-474 c não precisam ser totalmente alinhadas com as respectivas linhas 50, 476 e 473. De fato, válvula de irrigação 464 pode ser configurada para ser posicionada seletivamente a fim de efetivamente controlar a quantidade de fluido a ser entregue a olho 47. De fato, em alguns pacientes, um fluxo de irrigação completo (tal como mostrado em Figura 8), pode levar a desconforto de paciente, enquanto uma abertura controlada por meio de que certas ramificações de válvula de irrigação 464 é posicionada em várias posições angulares em relação à linha de irrigação 50 pode ser desejável. Assim, semelhante a válvula de ventilação 62, válvula de irrigação 464 pode também ser configurada para entrega de irrigação variável.
[0073] Uma outra configuração alternativa para uma válvula de irrigação de multiposição é mostrada em Figura 9B. Na presente disposição, uma válvula de irrigação de multiposição 464' é provida tendo um caminho em formato de L formado nos mesmos. Válvula de irrigação de multiposição 464' inclui uma primeira ramificação 474A 'e uma segunda ramificação 474B'. Uso de válvula de irrigação de multiposição 464' será descrita abaixo em conexão com Figuras 10A- 10C.
[0074] Com referência as Figuras 10A- 10C, componentes de uma outra alternativa de sistema de fluidos de faco exemplar 400' para uso com um sistema de bombeamento de deslocamento positivo é mostrado. Sistema de fluidos de faco 400' inclui muitos dos mesmos componentes como mostrado e descrito acima em conexão com Figuras 3 e 5-8. Em algumas modalidades, os componentes dentro da caixa tracejada pelo menos parcialmente podem ser incluídos em um cassete de fluídica configurado para ser fixado a um console cirúrgico.
[0075] Sistema de fluidos de faco 400' inclui manga de infusão 44 de utensílio 42 que é conectado a uma fonte de irrigação 448 por linha de irrigação 50. Uma válvula de irrigação de multiposição 464' que é conectada fluidicamente e posicionada em uma junção de três vias entre uma linha de alimentação de irrigação 473, linha de irrigação 50 e uma linha de desvio 476. Um sensor de pressão de linha de irrigação 475 pode ser posicionado em linha de irrigação 50 entre alimentação de irrigação 448 e utensílio 42. Enquanto fonte de irrigação 448 pode ser qualquer fonte de irrigação adequada, em um arranjo exemplar, fonte de irrigação 448 inclui um recipiente de irrigação que utiliza gravidade para forçar fluido de infusão para fora do recipiente de irrigação e dentro de linha de alimentação de irrigação 473.
[0076] Válvula de irrigação de multiposição 464' pode ser configurada como uma válvula rotativa que pode ser posicionada operativamente para controlar seletivamente irrigação em sistema de fluidos de faco 400'. Portanto, em operação, como mostrado em Figura 10A, quando válvula de irrigação 464' é orientada tal que primeira ramificação 474A' está totalmente alinhada com linha de irrigação 50 e segunda ramificação 474B' é orientada a fim de estar fora de alinhamento com linha de alimentação de irrigação 473 e linha de desvio 476, nenhuma irrigação é alimentada a linha de irrigação 50.
[0077] Referindo-se agora a Figura 10B, aplicar irrigação para utensílio 42, válvula de irrigação 464' pode ser seletivamente rotacionada tal que primeira ramificação 474A' está totalmente alinhada com linha de alimentação de irrigação 473 e segunda ramificação 474B' está parcialmente alinhada com linha de irrigação 50. Nesse sentido, fluido de alimentação de irrigação 448 é dirigido através de linha de alimentação de irrigação 473, a linha de irrigação 50 através de válvula de irrigação 464' e para utensílio 42. Como com válvula de irrigação 464, pode ser desejável para seletivamente posicionar primeiras e segundas ramificações 474A' e 474B' a fim de efetivamente controlar a quantidade de fluido a ser entregue a olho 47.Assim, é contemplado que linha de irrigação 50 pode estar sujeita a uma abertura controlada com linha de alimentação de irrigação 473, dessa forma primeiras e segundas ramificações 474A' e 474B' de válvula de irrigação 464' está posicionada em várias posições angulares para prover menos que fluxo de irrigação completo através de linha de irrigação 50. Assim, semelhante à válvula de ventilação 62, válvula de irrigação 464' pode também ser configurada para entrega de irrigação variável.
[0078] Figura 10C ilustra uma operação de escorva para alimentação de irrigação 448 de sistema de fluidos de faco 400' por acionamento de válvula de irrigação 464'. Mais especificamente, válvula de irrigação 464' pode ser seletivamente rotacionada tal que primeira ramificação 474A' está pelo menos parcialmente alinhada com linha de desvio 476 e segunda ramificação 474B' está pelo menos parcialmente alinhada com linha de alimentação de irrigação 473. Nesse sentido, quando sistema de fluidos de faco 400 é operado, fluido de alimentação de irrigação 448 é direcionado para esvaziar saco de drenagem 58.
[0079] Enquanto válvulas de irrigação de multiposição 464 e 464' ambas foram descritas em conexão com um sistema de fluidos de faco 400 que também incorpora uma válvula de ventilação variável de 62, entende-se que o escopo da presente divulgação não é limitado a um sistema de fluidos de faco 400 que inclui tanto uma válvula de irrigação de multiposição 464/464' e uma válvula de ventilação variável 62. Adicionalmente, válvulas de irrigação de multiposição 464/464' são capazes de operar em um estilo de tipo "em/fora, ou, como descrito acima, válvulas de irrigação de multiposição 464/464 ' pode também ser configurado para prover um orifício variável a fim de controlar seletivamente a quantidade de irrigação, em um modo semelhante ao qual foi descrito anteriormente em conexão com válvula de ventilação variável 62. Por exemplo, a quantidade de irrigação a ser provida para utensílio 42 a partir de linha de alimentação de irrigação 473 pode ser seletivamente controlada por uma linha de irrigação de multiposição variável, tal que menos do que irrigação completa a partir de linha de alimentação de irrigação 473 pode ser alimentada para linha de irrigação 50 (e, portanto, utensílio 42). Em tal instância, válvula de irrigação variável de multiposição 464/464' é seletivamente rotacionada a fim de prover comente comunicação parcial com ambas linhas de alimentação de irrigação 473 e linhas de irrigação 50.
[0080] Referindo-se agora a Figura 11, componentes de ainda uma outra alternativa de sistema de fluidos de faco 500 para uso com um sistema de bombeamento de deslocamento positivo é mostrado. Sistema de fluidos de faco 500 inclui muitos dos mesmos componentes como mostrado e descrito acima em conexão com Figuras 3, e 5-10. Nesse sentido, como componentes foram dados os mesmos números de referência. Para uma discussão detalhada daqueles componentes, é feita referência à discussão acima com respeito a Figura 3.
[0081] Sistema de fluidos de faco 500 inclui manga de infusão 44 de utensílio 42 que é conectado a fonte de irrigação 48 por uma linha de alimentação de irrigação 549 que é fluidicamente conectada a uma linha de irrigação 50. Uma linha de escape de aspiração 54 estende-se a partir de bomba 20. Em uma disposição exemplar, linha de escape de aspiração 54 está fluidicamente conectada a um reservatório de linha de dreno 56. Reservatório 56 também pode drenar em um saco de drenagem opcional 58. Alternativamente, conforme mostrado no espectro, linha de escape 54' pode ser conectada fluidicamente diretamente para drenar saco 58.
[0082] Uma linha de ventilação de aspiração 560 está fluidicamente conectada entre uma linha de aspiração 52 e linha de irrigação 50. Uma válvula proporcional de multipropósito 562 é fluidicamente conectada entre linha de ventilação de aspiração 560 e linha de irrigação 50 a fim de controlar seletivamente a pressão de aspiração dentro de linha de aspiração 52 e fluxo de irrigação dentro de linha de irrigação 50. Sensor de pressão 63 está também em comunicação fluida com linha de aspiração 52.
[0083] Válvula de multipropósito 562 é configurada para prover um tamanho de orifício variável para modular seletivamente vácuo, permitindo dessa forma rotação unidirecional da bomba 20 em uma primeira direção para gerar fluxo/vácuo, enquanto permitindo controle seletivo de aspiração/vácuo para utensílio 42 com base na posição angular de válvula de multipropósito 62. Mais especificamente, em uma configuração exemplar, referindo-se a Figuras 12A-12B, o corpo de válvula multipropósito 562 é definida por uma periferia 570. O corpo tem um primeiro caminho de fluxo 563A formado em uma porção da periferia 570 e um segundo caminho de fluxo 563B formado em uma outra porção da periferia 570.
[0084] Referindo-se de volta a Figura 12A, em operação, a válvula de multipropósito 562 é seletivamente rotacionável dentro de um sulco 600 formado em cassete 28. Mais especificamente, operativamente conectadas a sulco 600 estão uma pluralidade de linhas fluidas que são seletivamente conectáveis uma para outra por meio da posição angular de válvula multipropósito 562. Por exemplo, em sistema de fluidos de faco 500 mostrado em Figura 11, válvula de multipropósito 562 serve para operativamente conectar linha de alimentação de irrigação 549, linha de irrigação 50, linha de aspiração 52, linha de escape de aspiração 54/54 ' por meio de primeiros e segundos caminhos de fluxo 563A, 563B. Válvula de multipropósito 562 é móvel dentro de sulco 600 a fim de prover uma variedade de disposições de conexão com respeito a linha de aspiração 52, linha de irrigação 50, linha de alimentação de irrigação 549 e linha de escape de aspiração 54/54' pode ser alcançado, bem como será explicado em mais detalhes abaixo.
[0085] Sensor de pressão 63 é operativamente ligado a um sistema de controle montado em console 40 e é configurado para detectar e comunicar mudanças de pressão em linha de aspiração 52 durante operação da máquina de facoemulsificação. Em uma configuração exemplar, limiares predeterminados de pressão são definidos dentro do sistema de controle tal que quando leituras de pressão de sensor de pressão 63 excederem aqueles limiares, o sistema de controle pode seletivamente mover válvula de multipropósito 562 por uma quantidade predeterminada para reduzir a pressão de aspiração dentro de linha de aspiração 52. Mais especificamente, segundo caminho de fluxo 563B em válvula de multipropósito 562 é móvel em relação à linha de ventilação de aspiração 560.
[0086] Por exemplo, válvula de multipropósito 562 pode ser posicionada dentro de sulco 600 e seletivamente rotacionado tal que segundo caminho de fluxo 563B totalmente fecha linha de ventilação de aspiração 560 fora de linha de aspiração 52, tal que vácuo total, conforme indicado pelas definições de pressão do usuário pré- selecionadas, é provido. Entretanto, se pressão aumentou dentro de linha de aspiração 52 por uma quantidade indesejável (tais como, por exemplo, por causa de um surto de pausa de oclusão), válvula multipropósito 562 pode ser, seletivamente, movida por uma quantidade predeterminada tal que segundo caminho de fluxo 563B operativamente conecta linha de aspiração 54/54 ' diretamente para linha de aspiração 52, por meio de linha de ventilação de aspiração 560, evitando assim, bomba 20. Esta ação rápida e eficazmente restaura a pressão de aspiração dentro da linha de aspiração 52 para a quantidade predeterminada aceitável, sem requerer reversão de bomba.
[0087] Em uma disposição exemplar, válvula de multipropósito 562 pode ser operativamente conectada a um pedal de interruptor de pé. Nesse sentido, o usuário pode operar o pedal de interruptor de pé para rotacionar válvula multipropósito 562 para seletivamente ventilar (por exemplo, levantando o pé dele/dela do pedal) linha de aspiração 52. O pedal de interruptor de pé pode ser configurado para rotacionar válvula de multipropósito 562 por uma quantidade predeterminada e em uma direção predeterminada, com base nas configurações de sistema de controle, com base em entrada do usuário. Devido à configuração de caminho de fluxo secundário 563B, uma variedade de pressões de aspiração pode ser alcançada pelo movimento seletivo de válvula multipropósito 562. Em algumas situações exemplares, pode ser desejável abrir completamente linha de escape 54/54', dessa forma linha de aspiração de ventilação 52.
[0088] Em outra disposição exemplar, válvula de multipropósito 562 está operativamente conectada a um motor 71, tais como um motor de passo, tendo um codificador de posição angular (tal como codificador 36). Quando sensor de pressão 63 detecta que pressão de aspiração excedeu um limiar predeterminado, o controlador automaticamente opera motor 71 para rotacionar válvula multipropósito 562 para uma posição predeterminada, mudando rapidamente, assim, pressão de aspiração dentro de linha de aspiração 52. Como o controlador, em cooperação com sensor de pressão 63, pode ser configurado para detectar um início de quebra de oclusão, válvula de multipropósito 562 pode ser rotacionada automaticamente pelo motor 71 a pressão de aspiração reduzida dentro de linha de aspiração 52 abaixo de definições predeterminadas. Esta função operaria para diminuir o surto oclusão secundário. Porque válvula multipropósito 562 permite controle seletivo e dinâmico de níveis de aspiração dentro de linha de aspiração 52, taxas mais elevadas de vácuo podem ser selecionadas e empregadas pelo usuário para o usuário e remoção de lente mais rápida e mais eficiente.
[0089] Além de controlar seletivamente os níveis de aspiração dentro do sistema 500, válvula de multipropósito 562 também serve um propósito adicional, ou seja, controlando irrigação através de linha de irrigação 50. Mais especificamente, primeiro caminho de fluxo 563A é configurado para seletivamente conectar mangueira de irrigação 549 a linha irrigação 50 quando o primeiro caminho de fluxo 563A está em comunicação com linha de alimentação de irrigação 549 e linha de irrigação 50. Entretanto, válvula multipropósito 562 pode ser rotacionada seletivamente tal que primeiro caminho de fluxo 563A é colocado sem comunicação com a linha de alimentação de irrigação 549, dessa forma, efetivamente fechando irrigação.
[0090] Além disso, a configuração de válvula multipropósito 562 também permite o controle seletivo do nível de aspiração, enquanto simultaneamente controlando irrigação. Por exemplo, linhas fluidas 549, 50, 54/54' e 52, e válvula de multipropósito 562 são configuradas de tal forma que quando primeiro caminho de fluxo 563A está em comunicação com ambas linhas de irrigação 50 e linha de alimentação de irrigação 549, segundo caminho de fluxo 563B está só em comunicação com linha de escape 54/54', deixando linha de aspiração 52 fechada para linha de escape 54/54'. Nessa disposição, irrigação é alimentada para utensílio 42 e linha de ventilação 560 é fechada. Alternativamente, válvula de multipropósito 562 podem ser rotacionadas a partir de posição de "linha de irrigação aberta, linha de ventilação fechada" tal que segundo caminho de fluxo 563B está aberto para ambas linhas de aspiração 52 e linha de escape 54/54', enquanto primeiro caminho de fluxo 563A está em comunicação com ambas linhas de irrigação 50 e linha de alimentação de irrigação 549. Nesta configuração, irrigação está sendo alimentada para utensílio 42 e linha de aspiração 52 está operativamente conectada para linha de escape 54/54' reduzindo assim, se não eliminar pressão de aspiração dentro de linha de aspiração 52. Este projeto elimina eficazmente um elemento de válvula do sistema 500, enquanto continua provendo para seletivamente variar pressão de aspiração e seletivamente controlar irrigação.
[0091] Referindo-se agora a Figura 13, um esquema parcial de um circuito de aspiração alternativo 700 para uso em um sistema de fluidos de faco é mostrado. Circuito de aspiração 700 emprega ambos modos de aspiração baseada em deslocamento e/ou baseados em vácuo. Circuito de aspiração 700 inclui uma linha de aspiração 752 que conecta-se fluidicamente a utensílio 742 ou a uma porta de entrada 753 de bomba peristáltica 720 ou a uma porta de entrada 731 de um reservatório venturi 760. Linhas de escape de aspiração 754/754' se estendem de porta de entrada 731 do reservatório venturi 760 e porta de entrada 753 de bomba peristáltica 720, respectivamente. Enquanto estado da técnica configura válvulas separadas usadas para fechar e abrir a porta de entrada 731 de reservatório venturi 760 e para prover ventilação seletiva de linha de aspiração 752 para um saco de drenagem 758, circuito de aspiração 700 emprega uma válvula de multipropósito 732 que é disposta dentro de um sulco selado de uma cassete (semelhante ao mostrado em Figura 12A acima) que provê ambas funções.
[0092] Mais especificamente, referindo-se a Figuras 14A - 14C, em uma válvula de multipropósito de disposição exemplar 732 é configurada com um canal 763 que é definido por uma primeira abertura 765 e uma segunda abertura 767. Em uma disposição exemplar, segunda abertura 767 pode ser configurada com um alargamento exteriormente estendendo. Alternativamente, canal 763 pode ser configurado com uma forma triangular que exteriormente se alarga em direção a uma periferia 770 de válvula de multipropósito 732. Primeira abertura 765 é posicionada transversal a canal 763. Segunda abertura é formada através de uma periferia 770 de válvula de multipropósito 732.
[0093] Referindo-se a Fig. 14A, durante operação, válvula de multipropósito 732 pode ser posicionada tal que aspiração é entregue para linha de aspiração 752 por bomba 720. Nesta configuração, válvula de multipropósito 732 é seletivamente girada tal que linha de entrada 731 para reservatório venturi é fechada e linha de escape de aspiração 754 é fechada fora de linha de aspiração 752. Nesta configuração, aspiração completa é provida pela bomba 720.
[0094] Um sensor de pressão 769 pode ser posicionado em linha de entrada 753 para detectar e monitorar a pressão em linha de aspiração 752. Sensor de pressão 769 operativamente está conectado a um sistema de controle montado em um console. Sensor de pressão 769 detecta e comunica mudanças de pressão em linha de aspiração 752 durante operação da máquina de facoemulsificação. Em uma configuração exemplar, limiares predeterminados de pressão podem ser definidos dentro do sistema de controle tal que quando leituras de pressão de sensor de pressão 769 excederem aqueles limiares, o sistema impele movimento de válvula de multipropósito 732 por uma quantidade predeterminada para reduzir a pressão de aspiração dentro de linha de aspiração 52. Mais especificamente, referindo-se a Figura 14B, válvula de multipropósito 732 pode ser rotacionada tais que segunda abertura 767 de canal 763 está em, pelo menos comunicação fluida parcial com linha de aspiração de aspiração 754. Assim, se pressão aumentou dentro de linha de aspiração 752 por uma quantidade indesejável (tais como, por exemplo, por causa de um surto de pausa de oclusão), válvula de multipropósito 732 pode ser seletivamente movida por uma quantidade predeterminada a fim de abrir parcialmente linha de escape de aspiração 754, conforme indicado em Figura 14B. Esta ação rápida e eficazmente restaura a pressão de aspiração dentro de linha de aspiração 752 para a quantidade predeterminada aceitável, sem requerer reversão de bomba. Entende-se, no entanto, que esse canal 763 pode ser rotacionado tal que linha de aspiração 752 é totalmente aberta para linha de escape de aspiração 754, se necessário for.
[0095] Como discutido acima, válvula de multipropósito 732 pode também ser utilizada para alternar fonte de aspiração a partir de bomba 720 para reservatório venturi 760. Referindo-se a Figura 14C, nesta configuração, canal 763 é posicionado tal que segunda abertura 767 está em comunicação com entrada 731 de reservatório de venturi 760, desse modo conectado a linha de aspiração 752 para reservatório venturi 760. Entretanto, linha de escape de aspiração 754 é isolada a partir de linha de aspiração 752.
[0096] Em algumas modalidades, um sistema de fluidos para uso em um sistema cirúrgico pode incluir um circuito de aspiração (compreendendo por uma linha de aspiração operativamente conectada a um instrumento cirúrgico, uma linha de escape de aspiração operativamente conectada a um receptáculo de resíduos, uma linha de aspiração conectada a uma primeira extremidade para a linha de aspiração, e uma válvula seletivamente variável operativamente conectado à linha de ventilação de aspiração (em que a válvula variável pode ser seletivamente acionada para seletivamente mudar pressão de aspiração dentro da linha de aspiração)) e um circuito de irrigação (compreendendo uma fonte de irrigação, uma linha de alimentação de irrigação conectado à fonte de irrigação e uma linha de irrigação, tendo uma primeira extremidade operativamente conectada à linha de alimentação de irrigação e uma segunda extremidade operativamente conectada ao dispositivo cirúrgico). O sistema de fluidos pode adicionalmente incluir um caminho de desvio, em que uma primeira extremidade do caminho de desvio é operativamente conectada à linha de alimentação de irrigação e uma segunda extremidade do caminho de desvio está conectada ao receptáculo de resíduos. O sistema de fluidos adicionalmente inclui uma válvula de irrigação seletivamente posicionável que operativamente conecta a linha de alimentação de irrigação, a linha de irrigação e o caminho de desvio tal que a válvula de irrigação seletivamente posicionável pode ser movida para direcionar irrigação a partir da linha de alimentação de irrigação. Em algumas modalidades, a válvula de irrigação pode ser uma válvula rotativa e inclui um canal de interseção formado na mesma, o canal definindo uma primeira ramificação, uma segunda ramificação e uma terceira ramificação. Em algumas modalidades a válvula de irrigação inclui primeira, segunda e terceira ramificações e é seletivamente móvel entre uma primeira posição, uma segunda posição e uma terceira posição; em que na primeira posição, a primeira ramificação é posicionada em comunicação com a da linha de alimentação de irrigação e a segunda ramificação é posicionada em comunicação com a linha de irrigação em que na segunda posição, a primeira ramificação está posicionada em comunicação com o caminho de desvio e a terceira ramificação está em comunicação com a linha de alimentação de irrigação; e em que, na terceira posição, a primeira ramificação está posicionada em comunicação com a linha de irrigação, a segunda ramificação está posicionada em comunicação com linha de alimentação de irrigação e a terceira ramificação está posicionada em comunicação com o caminho de desvio. Em algumas modalidades, a válvula de ventilação variável pode estar conectada à linha de irrigação tal que a válvula de ventilação variável pode ser seletivamente movida a fim de interromper seletivamente fluxo de fluido na linha de irrigação e seletivamente variar pressão de aspiração dentro da linha de aspiração. Em algumas modalidades, a válvula de ventilação variável pode ser configurada com primeiros e segundos caminhos de fluxo formados no mesmo, em que o primeiro caminho de fluxo pode ser seletivamente alinhado com a linha de alimentação de irrigação e a linha de irrigação para abrir a linha de irrigação para a fonte de alimentação de irrigação, e em que o segundo caminho de fluxo pode ser seletivamente alinhado com a linha de aspiração e linha de escape de aspiração para seletivamente variar a pressão de aspiração dentro da linha de aspiração.
[0097] Em algumas modalidades, um circuito de aspiração para um sistema de fluidos para controlar seletivamente aspiração pode incluir uma linha de aspiração operativamente conectada a um instrumento cirúrgico, uma primeira linha de escape de aspiração operativamente conectada a um receptáculo de resíduos, uma segunda linha de escape de aspiração operativamente conectada a um receptáculo de resíduos, uma fonte de aspiração baseada em deslocamento operativamente conectada à primeira linha de escape de aspiração, uma fonte de aspiração baseada em vácuo operativamente conectada à segunda linha de escape de aspiração, e uma válvula variável seletivamente operativamente conectada a ambas a fonte de aspiração baseada em deslocamento e a fonte de aspiração baseada em vácuo; em que a válvula variável pode ser acionada para seletivamente mudar pressão de aspiração dentro da linha de aspiração quando a fonte de aspiração baseada em deslocamento é empregada. Em algumas modalidades, a válvula variável pode ser acionada seletivamente para prover pressão de aspiração para a linha de aspiração da fonte de aspiração baseada em vácuo. Em algumas modalidades, a fonte de aspiração baseada em deslocamento é uma bomba peristáltica e fonte de aspiração baseada em vácuo inclui um reservatório venturi. Em algumas modalidades, a válvula variável adicionalmente compreende um corpo de válvula que inclui um canal que é definido por uma primeira abertura e uma segunda abertura, em que a primeira abertura é posicionada transversal ao comprimento do canal e em que a segunda abertura é formada através de uma periferia do corpo da válvula.
[0098] Será apreciado que os dispositivos e métodos aqui descritos têm amplas aplicações. As modalidades anteriores foram escolhidas e descritas no intuito de ilustrar princípios dos métodos e aparelhos, bem como algumas aplicações práticas. A descrição anterior permite que outros versados na técnica de utilizar métodos e aparelhos em várias modalidades e com várias modificações como são adequados ao uso específico contemplado. Em conformidade com as provisões dos estatutos de patentes, os princípios e modos de operação dessa invenção foram explicados e ilustrados em modalidades exemplares.
[0099] Pretende-se que o escopo dos métodos presentes e aparelhos sejam definidos pelas seguintes reivindicações. Entretanto, deve ser entendido que esta invenção pode ser praticada de outra maneira que é especificamente explicada e ilustrada sem partir de seu espírito ou escopo. Deve ser entendido por aqueles versados na técnica que várias alternativas para as modalidades neste documento descritas podem ser empregada6s em praticar as reivindicações sem partir do espírito e o escopo como definido nas seguintes reivindicações. O escopo da invenção deve ser determinado não com referência a descrição acima, mas, em vez disso, deve ser determinado com referência às reivindicações anexas, juntamente com o escopo completo de equivalentes as quais tais reivindicações são intituladas. É antecipado e se pretende que desenvolvimentos futuros ocorrerão nas técnicas discutidas neste documento, e que os métodos e sistemas divulgados serão incorporados em tais exemplos de futuros. Além disso, todos termos usados nas reivindicações são designados para serem dados suas mais amplas construções razoáveis e seus significados comuns como entendido por aqueles versados na técnica, a menos que uma indicação explícita ao contrário seja descrita neste documento. Em particular, uso dos artigos singulares tais como "o", "a" "um" "uma" etc. devem ser lidos para recitar um ou mais dos elementos indicados, a menos que uma reivindicação recite uma limitação explícita ao contrário. Pretende-se que as seguintes reivindicações definam o escopo da invenção e que os métodos e aparelhos dentro do escopo destas reivindicações e seus equivalentes sejam abrangidos. Em suma, deve ser entendido que a invenção é capaz de modificação e variação e é limitada somente pelas seguintes reivindicações.
Claims (18)
1. Circuito de aspiração para um sistema de fluidos (11) para controlar seletivamente aspiração, caracterizado pelo fato de que compreende: uma linha de aspiração (52) operativamente conectada a um instrumento cirúrgico (42), uma bomba de aspiração (20) para criar um fluxo de aspiração na linha de aspiração (52), uma linha de escape de aspiração (54) operativamente conectada à bomba de aspiração (20) em uma extremidade e a um receptáculo de resíduos (58) na extremidade oposta; uma linha de ventilação de aspiração (60) conectada em uma primeira extremidade a uma linha de aspiração (52), entre a bomba de aspiração (20) e o instrumento cirúrgico (42); e uma válvula de ventilação (62) seletivamente variável operativamente conectada à linha de ventilação de aspiração (60), em que a válvula de ventilação (62) variável pode ser seletivamente movida para seletivamente mudar a pressão de aspiração dentro da linha de aspiração (52); uma linha de irrigação (50) operativamente conectada ao instrumento cirúrgico (42); um sensor de pressão de irrigação (475) e um atuador, o sensor de pressão de irrigação (475) sendo posicionado para detectar a pressão de irrigação na linha de irrigação (50) e o atuador sendo operativamente conectado à válvula de ventilação (62); em que o sensor de pressão de irrigação (475) e o atuador são conectados a um controlador (40); e em que o controlador (40) é operativo para iniciar o atuador para mover a válvula de ventilação (62) em resposta à pressão detectada pelo sensor de pressão de irrigação (475) para variar a pressão de aspiração dentro da linha de aspiração (52).
2. Circuito de aspiração, de acordo com reivindicação 1, caracterizado pelo fato de que a linha de ventilação de aspiração (60) é conectada em uma segunda extremidade a uma linha de escape de aspiração (54) para formar um desvio (476) em torno da bomba de aspiração (20).
3. Circuito de aspiração, de acordo com reivindicação 1, caracterizado pelo fato de que a linha de ventilação de aspiração (60) é conectada em uma segunda extremidade a atmosfera.
4. Circuito de aspiração, de acordo com reivindicação 1, caracterizado pelo fato de que a linha de ventilação de aspiração (60) é conectada em uma segunda extremidade a uma fonte de pressão de ventilação de fluido ou solução salina pressurizada.
5. Circuito de aspiração, de acordo com reivindicação 1, caracterizado pelo fato de que a linha de ventilação de aspiração (60) é conectada em uma segunda extremidade a uma linha de irrigação (50).
6. Circuito de aspiração, de acordo com reivindicação 1, caracterizado pelo fato de que ainda compreende: um sensor de pressão de aspiração (63) e um atuador, o sensor de pressão de aspiração (63) sendo operativamente conectado à linha de aspiração (52) e o atuador sendo operativamente conectado à válvula de ventilação (62), em que o sensor de pressão de aspiração (63) e o atuador são conectados a um controlador (40), e em que o controlador (40) é operativo para iniciar o atuador para mover a válvula de ventilação (62) em resposta aos valores de pressão predeterminados detectados pelo sensor de pressão de aspiração (63) para variar a pressão de aspiração dentro da linha de aspiração (52).
7. Circuito de aspiração, de acordo com a reivindicação 6, caracterizado pelo fato de que o atuador é um motor (71).
8. Circuito de aspiração, de acordo com reivindicação 1, caracterizado pelo fato de que a válvula de ventilação (62) variável é operativamente conectada a uma linha de irrigação (50) de modo que a válvula de ventilação (62) variável pode ser seletivamente movida a fim de interromper seletivamente fluxo de fluido na linha de irrigação (50) e seletivamente variar pressão de aspiração dentro da linha de aspiração (52).
9. Circuito de aspiração, de acordo com a reivindicação 8, caracterizado pelo fato de que a válvula de ventilação (62) variável é configurada com primeiros e segundos caminhos de fluxo formados na mesma, em que o primeiro caminho de fluxo pode ser seletivamente e pelo menos parcialmente, alinhado com uma linha de alimentação de irrigação e a linha de irrigação (50) para abrir a linha de irrigação (50) para uma fonte de alimentação de irrigação, e em que o segundo caminho de fluxo pode ser seletivamente e pelo menos parcialmente, alinhado com a linha de aspiração (52) e linha de escape de aspiração (54) para seletivamente variar a pressão de aspiração dentro da linha de aspiração (52).
10. Circuito de aspiração, de acordo com a reivindicação 1, caracterizado pelo fato de que a válvula de ventilação (62) é um válvula rotatória que ainda compreende uma abertura de entrada (68), uma abertura de saída (69) e um canal (66) que conecta a abertura de entrada (68) à abertura de saída (69); em que a válvula de ventilação (62) pode ser seletivamente rotacionada para seletivamente posicional o canal (66) em pelo menos comunicação parcial com a linha de aspiração (52); e em que a válvula de ventilação (62) é operativamente conectada a um atuador tendo um codificador de posição angular (36).
11. Circuito de aspiração, de acordo com a reivindicação 10, caracterizado pelo fato de que o atuador é configurado para mover a válvula de ventilação (62) para fornecer um tamanho de orifício variável para modular seletivamente aspiração dentro da linha de aspiração (52).
12. Circuito de aspiração, de acordo com a reivindicação 6, caracterizado pelo fato de que o controlador (40) é operativo para mover a válvula de ventilação (62) por uma quantidade predeterminado para reduzir a pressão de aspiração na linha de aspiração (52), em que o valor de pressão predeterminado é detectado.
13. Circuito de aspiração, de acordo com a reivindicação 1, caracterizado pelo fato de que a bomba de aspiração (20) compreende uma série de rolos (26) que agem em uma folha elastomérica definindo parte da linha de aspiração (52).
14. Circuito de aspiração, de acordo com a reivindicação 1, caracterizado pelo fato de que o sensor de pressão de irrigação (475) é localizado no instrumento cirúrgico (42).
15. Circuito de aspiração, de acordo com a reivindicação 14, caracterizado pelo fato de que o instrumento cirúrgico (42) é uma peça de mão cirúrgica.
16. Circuito de aspiração, de acordo com a reivindicação 1, caracterizado pelo fato de que a linha de irrigação (50) fornece fluido de irrigação para o instrumento cirúrgico (42) a partir de uma fonte de irrigação (48); e em que o sensor de pressão de irrigação (475) é localizado na linha de irrigação (50) entre a fonte de irrigação (48) e o instrumento cirúrgico (42).
17. Circuito de aspiração, de acordo com a reivindicação 1, caracterizado pelo fato de que o controlador (40), usando informações do sensor de pressão de irrigação (475), é configurado para detectar um início de quebra de oclusão, e em que o controlador (40) é configurado para minimizar o início da quebra de oclusão pela iniciação do atuador para mover a válvula de ventilação (62).
18. Circuito de aspiração, de acordo com a reivindicação 6, caracterizado pelo fato de que o controlador (40), usando informações do sensor de pressão de irrigação (475), é configurado para detectar um início de quebra de oclusão, e em que o controlador (40) é configurado para minimizar o início da quebra de oclusão pela iniciação do atuador para mover a válvula de ventilação (62).
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161568220P | 2011-12-08 | 2011-12-08 | |
| US61/568,220 | 2011-12-08 | ||
| BR112014013812-5A BR112014013812B1 (pt) | 2011-12-08 | 2012-11-27 | Circuito de aspiraqao para um sistema de fluidos |
| PCT/US2012/066594 WO2013085745A1 (en) | 2011-12-08 | 2012-11-27 | Selectively moveable valve elements for aspiration and irrigation circuits |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| BR122019028274B1 true BR122019028274B1 (pt) | 2021-01-19 |
Family
ID=48572664
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112014013812-5A BR112014013812B1 (pt) | 2011-12-08 | 2012-11-27 | Circuito de aspiraqao para um sistema de fluidos |
| BR122019028291-9A BR122019028291B1 (pt) | 2011-12-08 | 2012-11-27 | Circuito de aspiração para um sistema de fluidos |
| BR122019028274-9A BR122019028274B1 (pt) | 2011-12-08 | 2012-11-27 | circuito de aspiração para um sistema de fluidos |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112014013812-5A BR112014013812B1 (pt) | 2011-12-08 | 2012-11-27 | Circuito de aspiraqao para um sistema de fluidos |
| BR122019028291-9A BR122019028291B1 (pt) | 2011-12-08 | 2012-11-27 | Circuito de aspiração para um sistema de fluidos |
Country Status (19)
| Country | Link |
|---|---|
| US (5) | US9561321B2 (pt) |
| EP (3) | EP3081239B8 (pt) |
| JP (4) | JP2015500698A (pt) |
| KR (3) | KR102079355B1 (pt) |
| CN (2) | CN108309558B (pt) |
| AR (1) | AR089585A1 (pt) |
| AU (3) | AU2012348191C1 (pt) |
| BR (3) | BR112014013812B1 (pt) |
| CA (3) | CA3057779C (pt) |
| DK (1) | DK2766064T3 (pt) |
| ES (2) | ES2595211T3 (pt) |
| IN (1) | IN2014CN04341A (pt) |
| MX (1) | MX346230B (pt) |
| PH (1) | PH12014501196A1 (pt) |
| PL (1) | PL2766064T3 (pt) |
| PT (1) | PT2766064T (pt) |
| RU (2) | RU2731477C2 (pt) |
| TW (3) | TWI580446B (pt) |
| WO (1) | WO2013085745A1 (pt) |
Families Citing this family (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| PL2766064T3 (pl) | 2011-12-08 | 2017-08-31 | Alcon Research, Ltd. | Selektywnie przemieszczalne elementy zaworowe dla obwodów zasysania i irygacji |
| US9549850B2 (en) | 2013-04-26 | 2017-01-24 | Novartis Ag | Partial venting system for occlusion surge mitigation |
| US10137034B2 (en) | 2013-11-26 | 2018-11-27 | Novartis Ag | Pressure-sensing vitrectomy surgical systems and methods |
| US10537471B2 (en) * | 2014-04-17 | 2020-01-21 | Novartis Ag | Hydraulic pump for ophthalmic surgery |
| ES2870660T3 (es) | 2014-10-24 | 2021-10-27 | Integrated Surgical LLC | Dispositivo de succión para instrumental quirúrgico |
| US9931447B2 (en) * | 2014-12-16 | 2018-04-03 | Novartis Ag | Quick-opening vent valve for phaco fluidics aspiration system |
| US9549851B2 (en) * | 2015-01-28 | 2017-01-24 | Novartis Ag | Surgical hand piece with integrated pressure sensor |
| US10926007B2 (en) | 2015-07-13 | 2021-02-23 | Conmed Corporation | Surgical suction device that uses positive pressure gas |
| US10821212B2 (en) | 2015-07-13 | 2020-11-03 | Conmed Corporation | Surgical suction device that uses positive pressure gas |
| US11051978B2 (en) | 2016-05-10 | 2021-07-06 | Alcon Inc. | Automated aspiration throttling in vitreoretinal surgery |
| WO2017199135A1 (en) | 2016-05-17 | 2017-11-23 | Novartis Ag | Automated viscous fluid control in vitreoretinal surgery |
| US10702415B2 (en) | 2016-08-18 | 2020-07-07 | Alcon Inc. | Surgical apparatus including aspiration device sensors |
| CN109789251B (zh) * | 2016-09-20 | 2021-12-28 | 美德乐控股公司 | 用于抽吸体液和用于输送物质的装置 |
| JP6812721B2 (ja) * | 2016-09-29 | 2021-01-13 | 株式会社ニデック | 眼科装置 |
| CN106730072B (zh) * | 2017-03-15 | 2023-08-11 | 四川大学 | 骨内泄压钉 |
| EP3691585B1 (en) | 2017-10-04 | 2023-09-27 | Johnson & Johnson Surgical Vision, Inc. | Systems for measuring fluid flow in a venturi based system |
| US11071816B2 (en) | 2017-10-04 | 2021-07-27 | Johnson & Johnson Surgical Vision, Inc. | System, apparatus and method for monitoring anterior chamber intraoperative intraocular pressure |
| EP3691708B1 (en) * | 2017-10-04 | 2021-07-21 | Johnson & Johnson Surgical Vision, Inc. | Phacoemulsification system with advanced occlusion management methods |
| EP3691707B1 (en) | 2017-10-04 | 2021-11-17 | Johnson & Johnson Surgical Vision, Inc. | A system to augment irrigation pressure and to maintain iop during post occlusion surge |
| US11116878B2 (en) | 2017-11-16 | 2021-09-14 | Alcon Inc. | Fluidics aspiration system |
| US11065371B2 (en) | 2017-12-14 | 2021-07-20 | Johnson & Johnson Surgical Vision, Inc. | Flow restrictor for surgical device |
| CN108670547B (zh) * | 2018-06-07 | 2020-12-04 | 河源光明眼科医院有限公司 | 白内障手术装置 |
| WO2020068823A1 (en) * | 2018-09-24 | 2020-04-02 | Stryker Corporation | Systems and methods for improving control responsiveness during aspiration |
| US11754196B2 (en) | 2018-10-22 | 2023-09-12 | Johnson & Johnson Surgical Vision, Inc. | Electromagnetic actuation of elastomeric valve for fluid flow control |
| CN109602963B (zh) * | 2018-12-29 | 2021-04-13 | 捷锐企业(上海)有限公司 | 吸氧与负压吸引集成模块 |
| US11779694B2 (en) | 2019-04-24 | 2023-10-10 | Johnson & Johnson Surgical Vision, Inc. | Systems and methods for proportional pressure and vacuum control in surgical system |
| JP2022532255A (ja) | 2019-05-17 | 2022-07-13 | カール・ツァイス・メディテック・キャタラクト・テクノロジー・インコーポレイテッド | 一体化吸引ポンプを有する眼科用切削器具 |
| RU2720821C1 (ru) * | 2019-05-21 | 2020-05-13 | Александр Николаевич Епихин | Системы ирригации и аспирации офтальмологического аппарата для катарактальной и витреальной хирургии |
| KR20220032046A (ko) | 2019-06-07 | 2022-03-15 | 칼 짜이스 메디텍 캐터랙트 테크놀로지 인크. | 안과 절단 도구용 다중 스테이지 트리거 |
| AU2020405535A1 (en) * | 2019-12-17 | 2022-08-11 | Johnson & Johnson Surgical Vision, Inc. | Rotary valve configuration for a surgical cassette |
| EP4090299A1 (en) * | 2020-01-14 | 2022-11-23 | Alcon Inc. | Vacuum oscillation prevention in a venturi surgical system |
| CN113730090A (zh) * | 2020-05-27 | 2021-12-03 | 深圳市钛金时代科技开发有限公司 | 一种整体管道超声乳化套件 |
| US20220008251A1 (en) * | 2020-07-13 | 2022-01-13 | Johnson & Johnson Surgical Vision, Inc. | Aspiration bypass control in a phacoemulsification probe |
| GB2597925A (en) * | 2020-08-03 | 2022-02-16 | Gyrus Medical Ltd | A flow valve position sensor for an electrosurgical device |
| CA3185398A1 (en) | 2020-08-14 | 2022-02-17 | Vincent A. Baxter | System and method for post-occlusion surge mitigation |
| US20220133537A1 (en) * | 2020-11-05 | 2022-05-05 | Johnson & Johnson Surgical Vision, Inc. | Controlling intraocular pressure during phacoemulsification procedures |
| US20220192876A1 (en) | 2020-12-22 | 2022-06-23 | Johnson & Johnson Surgical Vision, Inc. | Module for aspiration and irrigation control |
| US20220339032A1 (en) * | 2021-04-21 | 2022-10-27 | Johnson & Johnson Surgical Vision, Inc. | Evaluation of phacoemulsification devices |
| US11679194B2 (en) | 2021-04-27 | 2023-06-20 | Contego Medical, Inc. | Thrombus aspiration system and methods for controlling blood loss |
| US11944340B2 (en) | 2021-06-11 | 2024-04-02 | Cilag Gmbh International | Suction and irrigation valve and method of priming same in a robotic surgical system |
| WO2023130134A2 (en) * | 2022-01-03 | 2023-07-06 | The General Hospital Corporation | Systems and methods for irrigating an anatomic space |
| KR102491812B1 (ko) * | 2022-09-28 | 2023-01-27 | 운스메디칼 주식회사 | 미세 조정용 압력 조절 장치 |
Family Cites Families (254)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3515155A (en) | 1967-02-24 | 1970-06-02 | Air Reduction | Gas mixture proportioner |
| NL145136C (pt) | 1967-07-25 | 1900-01-01 | ||
| US3558100A (en) | 1968-01-23 | 1971-01-26 | Eldon E Hulsey | Multiple orifice rotary control valve |
| US3732858A (en) | 1968-09-16 | 1973-05-15 | Surgical Design Corp | Apparatus for removing blood clots, cataracts and other objects from the eye |
| US3996935A (en) | 1969-02-14 | 1976-12-14 | Surgical Design Corporation | Surgical-type method for removing material |
| US3844272A (en) | 1969-02-14 | 1974-10-29 | A Banko | Surgical instruments |
| US3693613A (en) | 1970-12-09 | 1972-09-26 | Cavitron Corp | Surgical handpiece and flow control system for use therewith |
| US4370983A (en) | 1971-01-20 | 1983-02-01 | Lichtenstein Eric Stefan | Computer-control medical care system |
| US3812855A (en) | 1971-12-15 | 1974-05-28 | Surgical Design Corp | System for controlling fluid and suction pressure |
| US3920014A (en) | 1971-12-15 | 1975-11-18 | Anton Banko | Surgical system for controlling the infusion of fluid to and the evacuation of fluid and material from an operating field |
| US3805787A (en) | 1972-06-16 | 1974-04-23 | Surgical Design Corp | Ultrasonic surgical instrument |
| US3815604A (en) | 1972-06-19 | 1974-06-11 | Malley C O | Apparatus for intraocular surgery |
| US3884238A (en) | 1972-06-19 | 1975-05-20 | Malley Conor C O | Apparatus for intraocular surgery |
| US3937222A (en) | 1973-11-09 | 1976-02-10 | Surgical Design Corporation | Surgical instrument employing cutter means |
| US4041947A (en) | 1974-01-28 | 1977-08-16 | Cavitron Corporation | Flow control system |
| US3902495A (en) | 1974-01-28 | 1975-09-02 | Cavitron Corp | Flow control system |
| US4007742A (en) | 1974-06-03 | 1977-02-15 | Surgical Design Corporation. | Surgical system for controlling the infusion of fluid to and the evacuation of fluid and material from an operating field |
| US3990452A (en) | 1975-06-13 | 1976-11-09 | Fibra-Sonics, Inc. | Medical machine for performing surgery and treating using ultrasonic energy |
| US4184510A (en) | 1977-03-15 | 1980-01-22 | Fibra-Sonics, Inc. | Valued device for controlling vacuum in surgery |
| US4180074A (en) | 1977-03-15 | 1979-12-25 | Fibra-Sonics, Inc. | Device and method for applying precise irrigation, aspiration, medication, ultrasonic power and dwell time to biotissue for surgery and treatment |
| US4117843A (en) | 1977-05-12 | 1978-10-03 | Surgical Design Corp. | Surgical operating system with upper pressure limit |
| US4274411A (en) | 1979-03-30 | 1981-06-23 | Dotson Robert S Jun | Fluid operated ophthalmic irrigation and aspiration device |
| US4261360A (en) | 1979-11-05 | 1981-04-14 | Urethral Devices Research, Inc. | Transurethral irrigation pressure controller |
| US4369785A (en) | 1980-02-21 | 1983-01-25 | Contemporary Ocu-Flo, Inc. | Surgical fluid flow system |
| US4395258A (en) | 1980-11-03 | 1983-07-26 | Cooper Medical Devices | Linear intra-ocular suction device |
| US4493698A (en) | 1980-11-03 | 1985-01-15 | Cooper Medical Devices | Method of performing opthalmic surgery utilizing a linear intra-ocular suction device |
| US4496342A (en) | 1981-03-20 | 1985-01-29 | Surgical Design Corporation | Surge prevention system for an ophthalmic instrument |
| JPS5831556Y2 (ja) | 1981-10-06 | 1983-07-13 | 株式会社 モリタ製作所 | 医療用バキユ−ム装置の調圧弁 |
| US4548205A (en) | 1982-10-27 | 1985-10-22 | Armeniades C D | Ophthalmic instrument for measuring intraocular fluid pressure |
| DE3317970A1 (de) | 1983-05-13 | 1984-11-15 | Schering AG, 1000 Berlin und 4709 Bergkamen | Vorrichtung und verfahren zur galvanischen abscheidung von metallen |
| US4722350A (en) | 1984-09-21 | 1988-02-02 | Armeniades C D | Ophthalmic instrument for measuring intraocular fluid pressure |
| US4670006A (en) | 1984-10-16 | 1987-06-02 | Sinnett Kevin B | Fluid and air infusion device |
| US4935005A (en) | 1985-06-05 | 1990-06-19 | Nestle, S.A. | Opthalmic fluid flow control system |
| US4841984A (en) | 1985-09-16 | 1989-06-27 | Armoor Ophthalmics, Inc. | Fluid-carrying components of apparatus for automatic control of intraocular pressure |
| US4764165A (en) | 1986-07-17 | 1988-08-16 | Mentor O & O, Inc. | Ophthalmic aspirator-irrigator with valve |
| DE3669032D1 (de) | 1986-11-05 | 1990-03-22 | Bosch & Sohn Med App | Okulopressionsgeraet. |
| US4882575A (en) | 1987-01-28 | 1989-11-21 | Sharp Kabushiki Kaisha | Monitor for blocked condition in tube for fluid infusion pump |
| US5195960A (en) | 1987-04-27 | 1993-03-23 | Site Microsurgical Systems, Inc. | Disposable vacuum/peristaltic pump cassette system |
| US5047009A (en) | 1987-09-22 | 1991-09-10 | Vitreoretinal Development, Inc. | Method and apparatus for ocular perfusion |
| US5032111A (en) | 1987-09-22 | 1991-07-16 | Vitreoretinal Development, Inc. | Method and apparatus for ocular perfusion |
| US4900301A (en) | 1987-09-22 | 1990-02-13 | Vitreoretinal Development, Inc. | Method for ocular perfusion |
| CA1321522C (en) | 1987-10-14 | 1993-08-24 | Rickey Paul Davis | Surgical irrigation and aspiration system |
| DE3805368C1 (pt) | 1988-02-17 | 1989-08-24 | Peter P. Dipl.-Ing. Wiest | |
| US4869715A (en) | 1988-04-21 | 1989-09-26 | Sherburne Fred S | Ultrasonic cone and method of construction |
| US5024652A (en) | 1988-09-23 | 1991-06-18 | Dumenek Vladimir A | Ophthalmological device |
| US5649904A (en) | 1988-10-07 | 1997-07-22 | Sandoz Ltd. | Method of treating cancer with a fully myeloablative regimen of chemotherapy, radiation or both |
| DE3843138A1 (de) | 1988-12-22 | 1990-06-28 | Bosch Gmbh Robert | Verfahren zur steuerung und erfassung der bewegung eines ankers eines elektromagnetischen schaltorgans |
| US4983401A (en) | 1989-05-22 | 1991-01-08 | Kinaform Technology, Inc. | Sustained release pharmaceutical preparations having pH controlled membrane coatings |
| US5154694A (en) | 1989-06-06 | 1992-10-13 | Kelman Charles D | Tissue scraper device for medical use |
| DE3933856A1 (de) | 1989-10-07 | 1991-04-18 | Wiest Peter P | Vorrichtung zum spuelen und absaugen von koerperhoehlen |
| US4944261A (en) | 1989-10-16 | 1990-07-31 | Coates George J | Spherical rotary valve assembly for an internal combustion engine |
| EP0424686A1 (en) | 1989-10-27 | 1991-05-02 | Storz Instrument Company | Control system for ophthalmic surgical instruments |
| US5417246A (en) | 1989-10-27 | 1995-05-23 | American Cyanamid Company | Pneumatic controls for ophthalmic surgical system |
| US5306237A (en) | 1989-11-06 | 1994-04-26 | Mectra Labs, Inc. | Disposable lavage |
| EP0482858A3 (en) | 1990-10-26 | 1992-07-08 | Alcon Surgical, Inc., | Surgical infusion control system |
| JP3123750B2 (ja) | 1990-11-13 | 2001-01-15 | 株式会社ニデック | 灌流吸引装置 |
| US5279547A (en) | 1991-01-03 | 1994-01-18 | Alcon Surgical Inc. | Computer controlled smart phacoemulsification method and apparatus |
| US5160317A (en) | 1991-01-03 | 1992-11-03 | Costin John A | Computer controlled smart phacoemulsification method and apparatus |
| US5586973A (en) | 1991-04-22 | 1996-12-24 | C & D Biomedical S.A. | Method and device for controlled irrigation and suctioning of a liquid clarificant during endoscopic surgery |
| FR2675367A1 (fr) | 1991-04-22 | 1992-10-23 | C D Biomedical Sa | Appareil d'irrigation controlee des cavites naturelles du corps. |
| AU2366092A (en) | 1991-07-31 | 1993-03-02 | Mentor O&O, Inc. | Controlling operation of handpieces during ophthalmic surgery |
| ES2146709T3 (es) | 1991-08-21 | 2000-08-16 | Smith & Nephew Inc | Sistema de control de fluidos. |
| US5287851A (en) | 1991-09-11 | 1994-02-22 | Beran Anthony V | Endotracheal tube connector with integral pneumotach transducer |
| US5160367A (en) | 1991-10-03 | 1992-11-03 | The United States Of America As Represented By The United States Department Of Energy | Salt transport extraction of transuranium elements from lwr fuel |
| US5755683A (en) | 1995-06-07 | 1998-05-26 | Deka Products Limited Partnership | Stopcock valve |
| US5267956A (en) * | 1992-02-05 | 1993-12-07 | Alcon Surgical, Inc. | Surgical cassette |
| US5242404A (en) | 1992-02-12 | 1993-09-07 | American Cyanamid Company | Aspiration control system |
| WO1993017729A1 (en) | 1992-03-03 | 1993-09-16 | Alcon Surgical, Inc. | System and apparatus for controlling fluid flow from a surgical handpiece |
| US5556378A (en) | 1992-06-17 | 1996-09-17 | Storz; Karl | Device for irrigation of body cavities |
| US5354268A (en) | 1992-11-04 | 1994-10-11 | Medical Instrument Development Laboratories, Inc. | Methods and apparatus for control of vacuum and pressure for surgical procedures |
| US5292306A (en) | 1993-01-29 | 1994-03-08 | Abbott Laboratories | Method of detecting occlusions in a solution pumping system |
| US5643304A (en) | 1993-02-16 | 1997-07-01 | Danek Medical, Inc. | Method and apparatus for minimally invasive tissue removal |
| US5403276A (en) | 1993-02-16 | 1995-04-04 | Danek Medical, Inc. | Apparatus for minimally invasive tissue removal |
| US5342293A (en) | 1993-06-22 | 1994-08-30 | Allergan, Inc. | Variable vacuum/variable flow phacoemulsification method |
| US5380280A (en) | 1993-11-12 | 1995-01-10 | Peterson; Erik W. | Aspiration system having pressure-controlled and flow-controlled modes |
| US5429143A (en) | 1993-11-22 | 1995-07-04 | Marzluff; Joseph | Device and method for determining hole integrity in surgical applications |
| US5591127A (en) | 1994-01-28 | 1997-01-07 | Barwick, Jr.; Billie J. | Phacoemulsification method and apparatus |
| DE4417189A1 (de) | 1994-05-17 | 1995-11-23 | Hippokratec Gmbh | Apparat zur Perfusion und Aspiration von (Spül-) Flüssigkeit in und aus Körperhöhlen |
| US5584824A (en) | 1994-06-08 | 1996-12-17 | Syntec, Inc. | Controlled vacuum cassette in ophthalmic retinal surgery |
| JP3679143B2 (ja) | 1994-06-30 | 2005-08-03 | 株式会社ニデック | 灌流吸引装置 |
| US5695473A (en) | 1994-07-27 | 1997-12-09 | Sims Deltec, Inc. | Occlusion detection system for an infusion pump |
| US5476448A (en) | 1994-10-19 | 1995-12-19 | Urich; Alex | Apparatus for suppressing a vacuum surge in eye surgery |
| WO1996013216A1 (en) | 1994-10-28 | 1996-05-09 | Chiron Vision Corporation | Control system for opthalmic surgery |
| EP0717970A1 (de) | 1994-12-20 | 1996-06-26 | GRIESHABER & CO. AG SCHAFFHAUSEN | Opthalmologische Aspirations- und Irrigationseinrichtung sowie Verfahren zum Betreiben derselben |
| DE19502305C2 (de) | 1995-01-26 | 2002-01-17 | Geuder Hans Gmbh | Apparatur zum Absaugen von Linsentrümmern bei augenchirurgischen Kataraktoperationen |
| US5562612A (en) | 1995-02-02 | 1996-10-08 | Charles D. Kelman | Apparatus and method for reverse flow irrigation and aspiration of interior regions of the human eye |
| US5569188A (en) | 1995-04-11 | 1996-10-29 | Mackool; Richard J. | Apparatus for controlling fluid flow through a surgical instrument and the temperature of an ultrasonic instrument |
| DE19514638C2 (de) | 1995-04-20 | 1998-06-04 | Peter Dr Med Boekstegers | Vorrichtung zur venendruckgesteuerten selektiven Absaugung und Retroinfusion eines Fluids aus bzw. in Körpervenen |
| WO1996038091A1 (en) | 1995-06-02 | 1996-12-05 | Surgical Design Corporation | Phacoemulsification handpiece, sleeve, and tip |
| US6165154A (en) | 1995-06-07 | 2000-12-26 | Deka Products Limited Partnership | Cassette for intravenous-line flow-control system |
| US5827223A (en) | 1995-08-31 | 1998-10-27 | Alaris Medical Systems, Inc. | Upstream occulsion detection system |
| DE19541633A1 (de) | 1995-11-08 | 1997-05-15 | Storz Endoskop Gmbh | Vorrichtung zum Spülen von Körperhöhlen |
| US5899674A (en) | 1995-12-01 | 1999-05-04 | Alcon Laboratories, Inc. | Indentification system for a surgical cassette |
| US5723795A (en) | 1995-12-14 | 1998-03-03 | Abbott Laboratories | Fluid handler and method of handling a fluid |
| US5965828A (en) | 1995-12-14 | 1999-10-12 | Abbott Laboratories | Fluid handler and method of handling a fluid |
| US5915282A (en) | 1995-12-14 | 1999-06-22 | Abbott Laboratories | Fluid handler and method of handling a fluid |
| US5766146A (en) | 1996-04-04 | 1998-06-16 | Allergan | Method of infusion control during phacoemulsification surgery |
| US5697898A (en) * | 1996-05-31 | 1997-12-16 | Surgical Design Corporation | Automated free flow mechanism for use in phacoemulsification, irrigation and aspiration of the eye |
| US6258111B1 (en) | 1997-10-03 | 2001-07-10 | Scieran Technologies, Inc. | Apparatus and method for performing ophthalmic procedures |
| US5836909A (en) | 1996-09-13 | 1998-11-17 | Cosmescu; Ioan | Automatic fluid control system for use in open and laparoscopic laser surgery and electrosurgery and method therefor |
| US5733256A (en) | 1996-09-26 | 1998-03-31 | Micro Medical Devices | Integrated phacoemulsification system |
| US5897524A (en) * | 1997-03-24 | 1999-04-27 | Wortrich; Theodore S. | Compact cassette for ophthalmic surgery |
| AU9028498A (en) | 1997-08-22 | 1999-03-16 | Deka Products Limited Partnership | System, method and cassette for mixing and delivering intravenous drugs |
| US6083193A (en) | 1998-03-10 | 2000-07-04 | Allergan Sales, Inc. | Thermal mode phaco apparatus and method |
| US6200289B1 (en) | 1998-04-10 | 2001-03-13 | Milestone Scientific, Inc. | Pressure/force computer controlled drug delivery system and the like |
| US6425883B1 (en) | 1998-05-08 | 2002-07-30 | Circuit Tree Medical, Inc. | Method and apparatus for controlling vacuum as a function of ultrasonic power in an ophthalmic phaco aspirator |
| DE19828677A1 (de) | 1998-05-20 | 2000-04-20 | Hans Reinhard Koch | Operationssystem, insbesondere ophthalmologisches Operationssystem |
| US6986753B2 (en) | 1998-05-21 | 2006-01-17 | Buivision | Constant ocular pressure active infusion system |
| US6010461A (en) | 1998-09-01 | 2000-01-04 | Sitek, Inc. | Monolithic silicon intra-ocular pressure sensor and method therefor |
| US6083195A (en) | 1998-10-15 | 2000-07-04 | Bausch & Lomb Surgical, Inc. | Ophthalmic aspiration system with selectable vent method |
| US6224583B1 (en) | 1998-10-15 | 2001-05-01 | Bausch & Lomb Surgical, Inc. | Air venting in ophthalmic irrigation/aspiration system via closed bag system |
| US6013049A (en) | 1998-10-29 | 2000-01-11 | Allergan Sales, Inc. | Controlled outflow sleeve |
| US6283719B1 (en) | 1998-11-05 | 2001-09-04 | Frantz Medical Development Ltd | Detecting obstructions in enteral/parenteral feeding tubes and automatic removal of clogs therefrom |
| DE19852574A1 (de) | 1998-11-06 | 2000-05-11 | Aesculap Meditec Gmbh | Medizinisches Instrument zur Phakoemulsifikation |
| US6241700B1 (en) | 1999-03-08 | 2001-06-05 | Alcon Laboratories, Inc. | Surgical handpiece |
| US6599271B1 (en) | 1999-04-13 | 2003-07-29 | Syntec, Inc. | Ophthalmic flow converter |
| US6465467B1 (en) | 1999-05-21 | 2002-10-15 | Biovitrum Ab | Certain aryl-aliphatic and heteroaryl-aliphatic piperazinyl pyrazines and their use in the treatment of serotonin-related diseases |
| US6179808B1 (en) | 1999-06-18 | 2001-01-30 | Alcon Laboratories, Inc. | Method of controlling the operating parameters of a surgical system |
| MXPA01011676A (es) | 1999-06-18 | 2003-09-10 | Alcon Mfg Ltd | Sistema de control de infusion. |
| US6162187A (en) | 1999-08-02 | 2000-12-19 | Ethicon Endo-Surgery, Inc. | Fluid collection apparatus for a surgical device |
| US6962488B2 (en) | 1999-11-10 | 2005-11-08 | Alcon, Inc. | Surgical cassette having an aspiration pressure sensor |
| US6293926B1 (en) | 1999-11-10 | 2001-09-25 | Alcon Universal Ltd. | Peristaltic pump and cassette |
| US6740074B2 (en) | 1999-08-31 | 2004-05-25 | Alcon, Inc. | Liquid venting surgical cassette |
| US6261283B1 (en) | 1999-08-31 | 2001-07-17 | Alcon Universal Ltd. | Liquid venting surgical system and cassette |
| US20040253129A1 (en) | 1999-08-31 | 2004-12-16 | Sorensen Gary P. | Liquid venting surgical cassette |
| AU5493000A (en) | 1999-10-01 | 2001-05-10 | Alcon Universal Limited | Sleeve for microsurgical instrument |
| US6585679B1 (en) | 1999-10-21 | 2003-07-01 | Retinalabs.Com | System and method for enhancing oxygen content of infusion/irrigation fluid for ophthalmic surgery |
| US6575990B1 (en) | 1999-10-21 | 2003-06-10 | Medical Instrument Development Laboratories, Inc. | High speed vitreous cutting system |
| DE60037747T2 (de) | 1999-11-10 | 2008-12-11 | Cytyc Surgical Products, Palo Alto | System zum feststellen von perforationen in einem körperhohlraum |
| JP3935653B2 (ja) | 2000-02-04 | 2007-06-27 | 株式会社ニデック | 灌流吸引装置 |
| US6626827B1 (en) | 2000-09-01 | 2003-09-30 | C. R. Bard, Inc. | Fluid management assembly for use in endoscopic procedures |
| US6699184B2 (en) | 2000-03-10 | 2004-03-02 | C.R. Bard, Inc. | Fluid management assembly having a vented outlet line for use in endoscopic procedures |
| AUPQ644400A0 (en) | 2000-03-23 | 2000-04-20 | Oversby Pty Ltd | An aspiration flow modulation device |
| AU766716B2 (en) | 2000-08-29 | 2003-10-23 | Alcon Manufacturing Limited | Method of controlling intraocular pressure and temperature |
| US6572604B1 (en) | 2000-11-07 | 2003-06-03 | Baxter International Inc. | Occlusion detection method and system for ambulatory drug infusion pump |
| US6579255B2 (en) | 2001-07-31 | 2003-06-17 | Advanced Medical Optics, Inc. | Pressurized flow of fluid into the eye using pump and pressure measurement system |
| US6599277B2 (en) | 2001-11-30 | 2003-07-29 | Bausch & Lomb Incorporated | Aspiration flow meter and control |
| US6875221B2 (en) | 2001-12-14 | 2005-04-05 | Bausch & Lomb Incorporated | Turbine driven vitrectomy cutter |
| US20030204166A1 (en) | 2002-04-25 | 2003-10-30 | Sorensen Gary P. | Liquid venting surgical cassette |
| US6908451B2 (en) | 2002-04-25 | 2005-06-21 | Alcon, Inc. | Liquid venting surgical system |
| US7070578B2 (en) | 2002-04-25 | 2006-07-04 | Alcon, Inc. | Surgical cassette latching mechanism |
| US20030225363A1 (en) | 2002-05-28 | 2003-12-04 | Raphael Gordon | Surgical cassette |
| TW200403408A (en) * | 2002-08-01 | 2004-03-01 | Baxter Int | Vacuum demand flow valve |
| US20040036386A1 (en) | 2002-08-26 | 2004-02-26 | Olivera Argelio M. | Surgical console |
| FR2845452B1 (fr) | 2002-10-04 | 2005-09-23 | Vygon | Robinet a cle tournante indexable. |
| US7175612B2 (en) | 2003-02-26 | 2007-02-13 | C.R. Bard, Inc. | Suction limiting device with variable control |
| GB2403413A (en) | 2003-07-02 | 2005-01-05 | Univ Sheffield | Measurement during surgery, especially eye surgery |
| US7168930B2 (en) | 2003-09-29 | 2007-01-30 | Bausch & Lomb Incorporated | Peristaltic pump with air venting via the movement of a pump head or a backing plate during surgery |
| US20050070871A1 (en) | 2003-09-29 | 2005-03-31 | Lawton Bruce Edward | Peristaltic pump cartridge including an aspirant collection bag for use in ophthalmic surgery |
| US7604607B2 (en) | 2003-09-29 | 2009-10-20 | Bausch & Lomb Incorporated | Peristaltic pump fitment for attachment to an aspirant collection bag |
| US20080221521A1 (en) | 2003-12-29 | 2008-09-11 | Getz Steven P | Methods and Systems For Detecting an Occlusion |
| US7297137B2 (en) | 2004-03-22 | 2007-11-20 | Alcon, Inc. | Method of detecting surgical events |
| US7645255B2 (en) | 2004-03-22 | 2010-01-12 | Alcon, Inc. | Method of controlling a surgical system based on irrigation flow |
| JP4617356B2 (ja) | 2004-05-24 | 2011-01-26 | ホスピラ・インコーポレイテツド | 組み合わされた流量、気泡、および閉塞の検出器 |
| US7092797B2 (en) | 2004-05-25 | 2006-08-15 | Sherwood Services Ag | Flow monitoring system for a flow control apparatus |
| US20050285025A1 (en) | 2004-06-29 | 2005-12-29 | Mikhail Boukhny | Optical noninvasive pressure sensor |
| US7704244B2 (en) | 2004-09-09 | 2010-04-27 | Alcon, Inc. | Surgical method |
| US7063680B2 (en) | 2004-09-09 | 2006-06-20 | Alcon, Inc. | Surgical apparatus |
| US20060078448A1 (en) | 2004-10-11 | 2006-04-13 | Holden Hugo R | Phacoemulsification machine with post-occlusion surge control system and related method |
| US7331462B2 (en) | 2004-10-26 | 2008-02-19 | Alcon, Inc. | Kit management system |
| US7758546B2 (en) | 2005-01-28 | 2010-07-20 | Alcon, Inc. | Variable flow device |
| US7785316B2 (en) | 2005-03-21 | 2010-08-31 | Abbott Medical Optics Inc. | Application of a system parameter as a method and mechanism for controlling eye chamber stability |
| US7670330B2 (en) | 2005-03-21 | 2010-03-02 | Abbott Medical Optics Inc. | Application of vacuum as a method and mechanism for controlling eye chamber stability |
| AU2011253755B8 (en) | 2005-03-21 | 2013-08-15 | Johnson & Johnson Surgical Vision, Inc. | The application of vacuum as a method and mechanism for controlling eye chamber stability |
| US8241242B2 (en) | 2005-03-30 | 2012-08-14 | Abbott Medical Optics Inc. | Phacoaspiration flow restrictor with bypass tube |
| US7524299B2 (en) | 2005-06-21 | 2009-04-28 | Alcon, Inc. | Aspiration control |
| US7648465B2 (en) | 2005-06-28 | 2010-01-19 | Alcon, Inc. | Method of testing a surgical system |
| US20070005002A1 (en) * | 2005-06-30 | 2007-01-04 | Intuitive Surgical Inc. | Robotic surgical instruments for irrigation, aspiration, and blowing |
| WO2007008437A1 (en) | 2005-07-07 | 2007-01-18 | Alcon, Inc. | Surgical system |
| US7326183B2 (en) | 2005-09-28 | 2008-02-05 | Alcon, Inc. | Intraocular pressure control |
| US7713237B2 (en) | 2005-09-28 | 2010-05-11 | Alcon, Inc. | Surgical cassette for intraocular pressure control |
| US8011905B2 (en) | 2005-11-17 | 2011-09-06 | Novartis Ag | Surgical cassette |
| US20070129732A1 (en) | 2005-11-28 | 2007-06-07 | Jaime Zacharias | Spring-Mass Surgical System |
| US20070135760A1 (en) | 2005-12-14 | 2007-06-14 | Williams David L | Occlusion clearance in microsurgical system |
| US7559914B2 (en) | 2005-12-14 | 2009-07-14 | Alcon, Inc. | Priming a microsurgical system |
| US20070185514A1 (en) | 2006-02-06 | 2007-08-09 | Kirchhevel G L | Microsurgical instrument |
| US8079836B2 (en) | 2006-03-01 | 2011-12-20 | Novartis Ag | Method of operating a peristaltic pump |
| US7887521B2 (en) * | 2006-05-17 | 2011-02-15 | Alcon Research, Ltd. | Ophthalmic injection system |
| US8303542B2 (en) | 2006-06-10 | 2012-11-06 | Bausch & Lomb Incorporated | Ophthalmic surgical cassette and system |
| EP2034936A4 (en) | 2006-06-16 | 2012-01-25 | Holden Jeannette | DEVICE FOR REGULATING FLOW |
| US20080125695A1 (en) | 2006-06-23 | 2008-05-29 | Hopkins Mark A | Reflux control in microsurgical system |
| US20080018488A1 (en) * | 2006-07-19 | 2008-01-24 | Siemens Vdo Automotive Corporation | Enhanced gauge tracking system |
| US7921017B2 (en) | 2006-07-20 | 2011-04-05 | Abbott Medical Optics Inc | Systems and methods for voice control of a medical device |
| JP4749969B2 (ja) | 2006-08-01 | 2011-08-17 | 株式会社ニデック | 灌流吸引装置 |
| CN200998362Y (zh) * | 2006-08-30 | 2008-01-02 | 周克俭 | 白内障手术吸引流量调节阀 |
| EP1897568B1 (de) | 2006-09-08 | 2010-06-23 | Carl Zeiss Surgical GmbH | Chirurgisches System |
| US8652086B2 (en) | 2006-09-08 | 2014-02-18 | Abbott Medical Optics Inc. | Systems and methods for power and flow rate control |
| US20080086093A1 (en) | 2006-09-18 | 2008-04-10 | Steppe Dennis L | Automatic stop cock valve |
| US9121509B2 (en) | 2006-09-26 | 2015-09-01 | Novartis Ag | Valve that is normally closed in the free state |
| US20080082077A1 (en) | 2006-09-29 | 2008-04-03 | David Lloyd Williams | System and method for flow rate control |
| RU2333011C1 (ru) * | 2006-10-26 | 2008-09-10 | Государственное образовательное учреждение высшего профессионального образования "Северный государственный медицинский университет" (г. Архангельск) Федерального агентства по здравоохранению и социальному развитию" (ГОУ ВПО СГМУ Росздрава) | Устройство для измельчения и аспирации сгустков крови из полости |
| US7981074B2 (en) | 2006-11-02 | 2011-07-19 | Novartis Ag | Irrigation/aspiration system |
| US10959881B2 (en) | 2006-11-09 | 2021-03-30 | Johnson & Johnson Surgical Vision, Inc. | Fluidics cassette for ocular surgical system |
| CA2669299C (en) | 2006-11-09 | 2016-01-05 | Advanced Medical Optics, Inc. | Reversible peristaltic pump and other structures for reflux in eye surgery |
| US9522221B2 (en) | 2006-11-09 | 2016-12-20 | Abbott Medical Optics Inc. | Fluidics cassette for ocular surgical system |
| US8491528B2 (en) | 2006-11-09 | 2013-07-23 | Abbott Medical Optics Inc. | Critical alignment of fluidics cassettes |
| CN200980878Y (zh) * | 2006-11-24 | 2007-11-28 | 贺定辉 | 手脚双控的人工呼吸装置 |
| US20080208110A1 (en) | 2007-02-26 | 2008-08-28 | Sanchez Robert J | Infusion system with injection site |
| US8323271B2 (en) | 2007-04-20 | 2012-12-04 | Doheny Eye Institute | Sterile surgical tray |
| TWM322494U (en) * | 2007-05-30 | 2007-11-21 | Topmast Entpr Co Ltd | Structure of rapid-releasing valve |
| US20080319451A1 (en) | 2007-06-21 | 2008-12-25 | Jaime Zacharias | Post-occlusion chamber collapse suppressing system for a surgical apparatus and method of use |
| US8721594B2 (en) | 2007-06-19 | 2014-05-13 | Alcon Research, Ltd. | Post-occlusion chamber collapse canceling system for a surgical apparatus and method of use |
| WO2008157674A1 (en) | 2007-06-19 | 2008-12-24 | Yablon, Jay, R. | Post-occlusion chamber collapse canceling system for a surgical apparatus and method of use |
| DE102007031722B4 (de) | 2007-07-06 | 2011-06-16 | Carl Zeiss Surgical Gmbh | Vorrichtung zur Reduzierung von Druckschwankungen in einem Aspirationszweig und chirurgisches System |
| US20090018488A1 (en) * | 2007-07-09 | 2009-01-15 | Davis Sherman G | Method of Priming a Surgical System |
| US10342701B2 (en) | 2007-08-13 | 2019-07-09 | Johnson & Johnson Surgical Vision, Inc. | Systems and methods for phacoemulsification with vacuum based pumps |
| DE102007044790A1 (de) | 2007-09-19 | 2009-04-02 | Dieter Mann | Einhandgerät für die Augenchirurgie |
| DE102007053370B3 (de) | 2007-11-09 | 2009-02-26 | Carl Zeiss Surgical Gmbh | Chirurgisches System zur Steuerung von Fluid |
| US9452288B2 (en) | 2007-12-06 | 2016-09-27 | Boston Scientific Neuromodulation Corporation | Multimodal neurostimulation systems and methods |
| WO2009076717A1 (en) | 2007-12-19 | 2009-06-25 | Opto Global Holdings Pty. Ltd. | Control flow devices, methods, and systems |
| US8246579B2 (en) * | 2007-12-20 | 2012-08-21 | Bausch & Lomb Incorporated | Surgical system having means for pressurizing venting valve |
| US8579851B2 (en) | 2007-12-20 | 2013-11-12 | Bausch & Lomb Incorporated | Surgical system having means for isolating vacuum pump |
| US9314553B2 (en) | 2008-01-10 | 2016-04-19 | Alcon Research, Ltd. | Surgical system |
| US20090247938A1 (en) | 2008-03-28 | 2009-10-01 | Buboltz David C | Intraoperative hypotony mitigation |
| US8460324B2 (en) | 2008-04-15 | 2013-06-11 | Abbott Medical Optics Inc. | High speed pneumatic vitrectomy control |
| US7811318B2 (en) | 2008-04-23 | 2010-10-12 | Syncardia Systems, Inc. | Apparatus and method for pneumatically driving an implantable medical device |
| DE102008025159A1 (de) | 2008-05-26 | 2009-12-10 | Osram Opto Semiconductors Gmbh | Halbleiterbauelement, Reflexlichtschranke und Verfahren zur Herstellung eines Gehäuses |
| DE102008026014B4 (de) | 2008-05-30 | 2019-03-21 | Carl Zeiss Meditec Ag | Chirurgisches System |
| US9005157B2 (en) * | 2008-11-07 | 2015-04-14 | Abbott Medical Optics Inc. | Surgical cassette apparatus |
| CA3017476A1 (en) * | 2008-11-07 | 2010-05-14 | Johnson & Johnson Surgical Vision, Inc. | Automatically pulsing different aspiration levels to an ocular probe |
| US8439874B2 (en) | 2008-11-21 | 2013-05-14 | Bausch & Lomb Incorporated | Apparatus and method for controlling a vacuum source to establish fluid flow |
| US8162919B2 (en) | 2008-12-08 | 2012-04-24 | Bausch & Lomb Incorporated | Flow control system based on leakage |
| US8854221B2 (en) | 2008-12-19 | 2014-10-07 | Bausch & Lomb Incorporated | System to identify viscosity of aspirated material during ophthalmic surgery |
| US8287485B2 (en) | 2009-01-28 | 2012-10-16 | Olympus Medical Systems Corp. | Treatment system for surgery and control method of treatment system for surgery |
| EP2393437B1 (en) | 2009-01-30 | 2017-04-19 | Cook Medical Technologies LLC | Medical device |
| US8052656B2 (en) * | 2009-02-10 | 2011-11-08 | Tyco Healthcare Group Lp | Enteral feeding system |
| DE102009009231B9 (de) | 2009-02-17 | 2013-06-27 | Human Med Ag | Einrichtung und Verfahren zum Zuführen einer Flüssigkeit zu medizinischen Zwecken an einen Operationsort |
| US8378837B2 (en) | 2009-02-20 | 2013-02-19 | Hospira, Inc. | Occlusion detection system |
| US8790303B2 (en) | 2009-03-09 | 2014-07-29 | Thermedx, Llc | Fluid management system heater assembly and cartridge |
| ES2582030T3 (es) | 2009-04-23 | 2016-09-08 | Fresenius Medical Care Deutschland Gmbh | Separador de aire, dispositivo funcional externo, sistema circulatorio y dispositivo de tratamiento |
| EA022698B1 (ru) | 2009-04-23 | 2016-02-29 | Фрезениус Медикел Кеэ Дойчланд Гмбх | Кассета для обработки крови |
| JP5806208B2 (ja) | 2009-05-06 | 2015-11-10 | アルコン リサーチ, リミテッド | 複数のセグメントを有する蠕動ポンプおよびカセット |
| WO2010129916A2 (en) | 2009-05-08 | 2010-11-11 | Abbott Medical Optics Inc. | Self-learning engine for the refinement and optimization of surgical settings |
| US7806865B1 (en) | 2009-05-20 | 2010-10-05 | Alcon Research, Ltd. | Pressurized irrigation squeeze band |
| RU2012104810A (ru) | 2009-07-13 | 2013-08-20 | Нестек С.А. | Кассеты и способ их использования |
| US8876751B2 (en) | 2009-08-06 | 2014-11-04 | Alcon Research, Ltd. | Phacoemulsification handpiece pressure booster |
| DE102009055709A1 (de) | 2009-11-26 | 2011-06-01 | Geuder Ag | Vorrichtung zum Absaugen von Flüssigkeit aus dem menschlichen oder tierischen Körper |
| US20110144567A1 (en) * | 2009-12-15 | 2011-06-16 | Alcon Research, Ltd. | Phacoemulsification Hand Piece With Integrated Aspiration Pump and Cartridge |
| NL2004308C2 (en) | 2010-02-26 | 2011-08-30 | D O R C Dutch Ophthalmic Res Ct International B V | An ophthalmic system, a method and a computer program product. |
| US8905930B2 (en) | 2010-05-20 | 2014-12-09 | Alcon Research, Ltd. | Infusion pressure control using blood pressure |
| US8287486B2 (en) | 2010-05-25 | 2012-10-16 | Alcon Research, Ltd. | Infusion pressure monitoring system |
| US20110313343A1 (en) | 2010-06-18 | 2011-12-22 | Alcon Research, Ltd. | Phacoemulsification Fluidics System Having a Single Pump Head |
| US8136779B2 (en) | 2010-07-27 | 2012-03-20 | Alcon Research, Ltd. | Mounting arrangement for a pressurized irrigation system |
| DE102010047010B4 (de) | 2010-09-30 | 2017-03-09 | Carl Zeiss Meditec Ag | Steuerungsvorrichtung für ein ophthalmochirurgisches System |
| US20120215160A1 (en) | 2010-12-31 | 2012-08-23 | Valenti Michael J | Ophthalmic surgical systems having intraocular pressure stabilizing apparatus |
| WO2012109198A1 (en) | 2011-02-07 | 2012-08-16 | Brigham And Women's Hospital, Inc. | Medical aspiration apparatus |
| EP2486883B1 (de) | 2011-02-14 | 2014-04-23 | Erbe Elektromedizin GmbH | Versorgungseinrichtung |
| DE102011052196B4 (de) | 2011-07-27 | 2017-06-08 | MAQUET GmbH | Vorrichtung zum Absaugen von Flüssigkeiten und/oder Partikeln aus Körperöffnungen |
| US9393152B2 (en) | 2011-09-19 | 2016-07-19 | Abbott Medical Optics Inc. | Systems and methods for controlling vacuum within phacoemulsification systems |
| PL2766064T3 (pl) | 2011-12-08 | 2017-08-31 | Alcon Research, Ltd. | Selektywnie przemieszczalne elementy zaworowe dla obwodów zasysania i irygacji |
| EP2892438B1 (en) | 2012-09-04 | 2018-10-10 | Med-Logics, Inc. | Tissue removal devices and systems |
| US9597229B2 (en) | 2013-03-15 | 2017-03-21 | Abbott Medical Optics Inc. | Phacoemulsification flow rate detection system and method |
| US9549850B2 (en) | 2013-04-26 | 2017-01-24 | Novartis Ag | Partial venting system for occlusion surge mitigation |
| CN203861644U (zh) * | 2014-06-05 | 2014-10-08 | 秦皇岛市妇幼保健院 | 三通吸引器 |
-
2012
- 2012-11-27 PL PL12855496T patent/PL2766064T3/pl unknown
- 2012-11-27 CA CA3057779A patent/CA3057779C/en active Active
- 2012-11-27 MX MX2014006712A patent/MX346230B/es active IP Right Grant
- 2012-11-27 EP EP16171180.9A patent/EP3081239B8/en active Active
- 2012-11-27 ES ES12855496.1T patent/ES2595211T3/es active Active
- 2012-11-27 BR BR112014013812-5A patent/BR112014013812B1/pt active IP Right Grant
- 2012-11-27 PT PT128554961T patent/PT2766064T/pt unknown
- 2012-11-27 US US13/685,860 patent/US9561321B2/en active Active
- 2012-11-27 CN CN201810356729.0A patent/CN108309558B/zh active Active
- 2012-11-27 BR BR122019028291-9A patent/BR122019028291B1/pt active IP Right Grant
- 2012-11-27 RU RU2017114183A patent/RU2731477C2/ru active
- 2012-11-27 DK DK12855496.1T patent/DK2766064T3/en active
- 2012-11-27 IN IN4341CHN2014 patent/IN2014CN04341A/en unknown
- 2012-11-27 KR KR1020147017544A patent/KR102079355B1/ko active IP Right Grant
- 2012-11-27 CA CA2855744A patent/CA2855744C/en active Active
- 2012-11-27 KR KR1020207004350A patent/KR102170110B1/ko active IP Right Grant
- 2012-11-27 CA CA3057786A patent/CA3057786C/en active Active
- 2012-11-27 RU RU2014127687A patent/RU2618902C2/ru active
- 2012-11-27 WO PCT/US2012/066594 patent/WO2013085745A1/en active Application Filing
- 2012-11-27 EP EP19204998.9A patent/EP3620189A1/en active Pending
- 2012-11-27 EP EP12855496.1A patent/EP2766064B1/en active Active
- 2012-11-27 CN CN201280060059.9A patent/CN103987411B/zh active Active
- 2012-11-27 ES ES16171180T patent/ES2770712T3/es active Active
- 2012-11-27 AU AU2012348191A patent/AU2012348191C1/en active Active
- 2012-11-27 JP JP2014545936A patent/JP2015500698A/ja active Pending
- 2012-11-27 BR BR122019028274-9A patent/BR122019028274B1/pt active IP Right Grant
- 2012-11-27 KR KR1020207004349A patent/KR102170102B1/ko active IP Right Grant
- 2012-12-05 TW TW101145658A patent/TWI580446B/zh not_active IP Right Cessation
- 2012-12-05 TW TW106107970A patent/TWI646985B/zh not_active IP Right Cessation
- 2012-12-05 TW TW107141902A patent/TW201907963A/zh unknown
- 2012-12-07 AR ARP120104610A patent/AR089585A1/es unknown
-
2014
- 2014-05-27 PH PH12014501196A patent/PH12014501196A1/en unknown
-
2016
- 2016-10-26 US US15/334,662 patent/US10314741B2/en active Active
- 2016-12-13 JP JP2016241152A patent/JP6530364B2/ja active Active
- 2016-12-22 AU AU2016277692A patent/AU2016277692B2/en active Active
-
2018
- 2018-05-29 JP JP2018102502A patent/JP6863929B2/ja active Active
-
2019
- 2019-03-08 AU AU2019201617A patent/AU2019201617B2/en active Active
- 2019-05-31 US US16/428,116 patent/US11045354B2/en active Active
-
2020
- 2020-04-13 JP JP2020071426A patent/JP6912624B2/ja active Active
-
2021
- 2021-05-26 US US17/330,571 patent/US11877952B2/en active Active
-
2023
- 2023-12-18 US US18/543,581 patent/US20240115420A1/en active Pending
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11877952B2 (en) | Selectively moveable valve elements for aspiration and irrigation circuits | |
| RU2773370C2 (ru) | Селективно перемещаемые клапаны для контуров аспирации и ирригации |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B25A | Requested transfer of rights approved |
Owner name: ALCON RESEARCH, LLC (US) |
|
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 27/11/2012, OBSERVADAS AS CONDICOES LEGAIS. |
|
| B25A | Requested transfer of rights approved |
Owner name: ALCON INC. (CH) |