BR112019009917B1 - Dispositivo, meio de armazenamento e método para fornecer uma capacidade de foco automático com base em informações de distância de objetos - Google Patents
Dispositivo, meio de armazenamento e método para fornecer uma capacidade de foco automático com base em informações de distância de objetos Download PDFInfo
- Publication number
- BR112019009917B1 BR112019009917B1 BR112019009917-4A BR112019009917A BR112019009917B1 BR 112019009917 B1 BR112019009917 B1 BR 112019009917B1 BR 112019009917 A BR112019009917 A BR 112019009917A BR 112019009917 B1 BR112019009917 B1 BR 112019009917B1
- Authority
- BR
- Brazil
- Prior art keywords
- objects
- focal
- field
- focus
- lens system
- Prior art date
Links
Images



Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/54—Mounting of pick-up tubes, electronic image sensors, deviation or focusing coils
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/10—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification by relative axial movement of several lenses, e.g. of varifocal objective lens
- G02B7/102—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification by relative axial movement of several lenses, e.g. of varifocal objective lens controlled by a microcomputer
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/18—Focusing aids
- G03B13/30—Focusing aids indicating depth of field
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/32—Means for focusing
- G03B13/34—Power focusing
- G03B13/36—Autofocus systems
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/55—Optical parts specially adapted for electronic image sensors; Mounting thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/671—Focus control based on electronic image sensor signals in combination with active ranging signals, e.g. using light or sound signals emitted toward objects
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/61—Control of cameras or camera modules based on recognised objects
- H04N23/611—Control of cameras or camera modules based on recognised objects where the recognised objects include parts of the human body
-
- H04N5/2254—
-
- H04N5/232121—
-
- H04N5/23219—
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Studio Devices (AREA)
- Automatic Focus Adjustment (AREA)
- Focusing (AREA)
Abstract
técnicas e mecanismos para determinar uma configuração do sistema de lentes. numa modalidade, as distâncias respectivas de uma referência são determinadas para cada um de uma pluralidade de objetos que são observáveis através do sistema de lentes. com base nas distâncias do objeto, as contagens de objetos em foco são determinadas, cada uma para uma configuração focal correspondente do sistema de lentes. cada tal contagem de objetos em foco representa um número total de objetos que estão (ou estariam) em foco durante a configuração focal correspondente, em que um respectivo da pluralidade de objetos está em uma profundidade próxima do campo da configuração focal correspondente. noutra modalidade, uma preferência de uma configuração focal sobre outra configuração focal é determinada com base nas contagens de objetos em foco.
Description
[001] Esta divulgação refere-se geralmente ao campo da óptica e em particular, mas não exclusivamente, refere-se à operação de um sensor de imagem com um sistema de lentes de foco variável.
[002] Em óptica, a profundidade de campo ("DOF") é o intervalo de uma cena entre uma distância mais próxima e uma distância mais distante, entre as quais as distâncias dos objetos na imagem podem parecer aceitavelmente nítida. Uma lente de foco fixo pode apenas focalizar com precisão em uma única profundidade dentro de uma cena, já que essa nitidez diminui gradualmente em ambos os lados dessa distância de foco. Objetos que caem dentro da profundidade de campo são considerados como tendo nitidez aceitável.
[003] Dispositivos de imagem digital, como câmeras digitais, geralmente incluem um conjunto de lente que focaliza a luz de imagem em um sensor de imagem que mede a luz de imagem e gera uma imagem baseada nas medições. Uma lente de foco variável pode ajustar sua distância de foco, de modo que possa ser focada em distâncias diferentes em momentos diferentes. Isso permite que o dispositivo de imagem traduza a profundidade de campo para focar objetos em qualquer uma de várias distâncias. Dispositivos convencionais de geração de imagens geralmente suportam a funcionalidade de foco automático para facilitar a mudança da distância focal. Como o número e a variedade de fatores de forma dos dispositivos de imagem continuam a crescer com o tempo, espera-se que haja uma demanda crescente por soluções que forneçam uma funcionalidade de foco automático responsiva e/ou eficiente.
[004] O documento JP 2014 235224 A refere-se a um dispositivo de imagem que compreende uma parte de imagem que fotografa a profundidade de campo em séries temporais e consecutivamente e gera uma pluralidade de imagens; uma parte de ajuste de foco que ajusta um status de foco da profundidade de campo; uma parte de detecção de sujeitos que detecta uma pluralidade de sujeitos principais a partir da imagem: e uma parte de controle que adquire pelo menos uma quantidade de uma característica da pluralidade de sujeitos principais detectados ou uma quantidade de outra característica diferente da quantidade da característica, e faz com que a parte de ajuste de foco ajuste o status de foco da profundidade de campo de modo a fazer com que o número de objetos principais se estabeleça dentro da profundidade de campo máxima, com base na quantidade da característica e/ou na quantidade de outra característica.
[005] O documento WO 2009/007860 A1 divulga um dispositivo que inclui lógica para capturar uma imagem, lógica para detectar uma pluralidade de faces na imagem, lógica para calcular uma distância associada a cada face, lógica para calcular uma profundidade de campo com base na distância associada a cada face, e lógica para calcular as configurações de foco e exposição para capturar a imagem com base na profundidade de campo associada à pluralidade de faces.
[006] Documento US 8.655.162, B2 descreve a definição de uma posição da lente com base em pontuações de foco. Uma pluralidade de posições iniciais de uma lente é determinada. Cada uma das posições iniciais pode corresponder a uma posição da lente em que um de uma pluralidade de objetos tem uma qualidade mais alta. Uma pontuação de foco pode ser determinada em cada uma das posições iniciais para o objeto correspondente com a qualidade mais alta. Uma posição final da lente entre duas das posições iniciais pode ser calculada com base nas pontuações de foco.
[007] As várias formas de realização da presente invenção são ilustradas a título de exemplo, e não como limitação, nas figuras dos desenhos anexos e nas quais:
[008] A FIG. 1 é um diagrama de blocos funcional que ilustra elementos de um sistema para determinar uma configuração focal de acordo com uma forma de realização.
[009] A FIG. 2 é um fluxograma ilustrando elementos de um método para operar um dispositivo sensor de imagem de acordo com uma forma de realização.
[0010] A FIG. 3A é uma vista em planta de um ambiente, incluindo um dispositivo para fornecer capacidade de foco automático de acordo com uma forma de realização.
[0011] A FIG. 3B é um gráfico que ilustra processos realizados para determinar uma configuração focal de acordo com uma forma de realização.
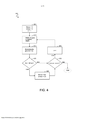
[0012] A FIG. 4 é um diagrama de fluxo que ilustra elementos de um processo para determinar uma configuração focal de acordo com uma forma de realização.
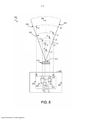
[0013] A FIG. 5 mostra várias vistas que ilustram características de um ambiente em que um dispositivo sensor de imagem é para fornecer capacidade de foco automático de acordo com uma forma de realização.
[0014] As formas de realização descritas aqui fornecem várias técnicas e mecanismos para determinar um tipo focado a ser fornecido com um sistema de lentes. Um tal sistema de lentes pode ser configurado, em algumas formas de realização, com base em uma avaliação de se os objetos observáveis através do sistema de lentes podem estar variadamente em foco ou fora de foco, por exemplo, dada uma abertura particular e/ou outra característica operacional de um sensor de imagem acoplado de forma óptica ao sistema de lentes. Onde é determinado que a configuração de um sistema de lente resulta em (ou resultaria em) mais objetos em foco, em comparação com outra configuração de sistema de lente, um sinal pode ser gerado, de acordo com uma forma de realização, para indicar uma preferência relativa da configuração do sistema de uma lente sobre a configuração do sistema de outras lentes.
[0015] Na descrição seguinte, numerosos detalhes específicos são estabelecidos para fornecer uma compreensão completa das formas de realização. Um técnico no assunto reconhecerá, no entanto, que as técnicas aqui descritas podem ser praticadas sem um ou mais dos detalhes específicos, ou com outros métodos, componentes, materiais, etc. Em outros casos, estruturas, materiais, ou operações não são mostradas ou descritas em detalhes para evitar obscurecer certos aspectos. A referência ao longo desta especificação a "uma forma de realização"ou "uma forma de realização"significa que uma característica particular, estrutura ou característica descrita em ligação com a forma de realização está incluída em pelo menos uma forma de realização da presente invenção. Assim, as aparências das expressões "em uma forma de realização"ou "em uma forma de realização"em vários locais ao longo desta especificação não são necessariamente todas referentes à mesma forma de realização. Além disso, os elementos, estruturas ou características particulares podem ser combinados de qualquer maneira adequada em uma ou mais formas de realização.
[0016] Em algumas imagens digitais convencionais, se houver apenas um assunto em uma cena, um algoritmo de foco automático (AF) normalmente ajusta a posição da lente para definir uma distância focal naquele assunto. Algumas formas de realização são baseadas em uma realização pelos inventores de que, em algumas circunstâncias, esta abordagem pode não ser ideal para cenas com vários objetos, tais como rostos humanos, localizados a várias distâncias. Tais formas de realização melhoram técnicas de foco automático convencionais, fornecendo mecanismos que reconhecem que um campo de foco, em comparação com outro campo de foco, pode resultar em um maior número e/ou melhor disposição dos objetos em foco.
[0017] Como usado aqui, "campo de visão"refere-se à porção de um ambiente que é observável através de um sistema de lentes. Um campo de visão pode se referir, por exemplo, àquela porção de um ambiente tridimensional, cuja imagem pode ser capturada como uma imagem bidimensional através de um sistema de lente particular direcionado à porção. O termo "campo de foco"(também "campo do foco" ou "campo focal") refere-se à porção do campo de visão na qual um objeto ou objetos, como observado através do sistema de lentes, estará suficientemente em foco, de acordo com alguns critérios pré-determinados. Um dado campo de foco - que pode depender em parte de uma dada abertura do sistema de imagem, por exemplo - compreende uma distância focal respectiva e uma profundidade de campo respectiva.
[0018] Uma "distância focal"é uma distância de algum ponto de referência (por exemplo, um centro de uma lente do sistema de lentes) para o centro do campo focal. Uma "profundidade de campo"é uma profundidade total do campo de foco (por exemplo, medida ao longo de uma linha de direção que se estende a partir de/para o ponto de referência). A profundidade de campo, também conhecida como "faixa de foco", se estende entre uma profundidade próxima de campo e uma profundidade afastada de campo. O termo "profundidade próxima de campo" refere-se a uma distância até uma borda mais próxima da profundidade de campo, medida a partir de um ponto de referência, como um centro de uma lente do sistema de lentes. Similarmente, "profundidade afastada de campo" refere-se a uma distância a partir do ponto de referência até uma borda mais distante da profundidade de campo.
[0019] Para muitos sistemas ópticos, a relação entre distância(s) focal e profundidade próxima de campo (Dn) pode, por exemplo, ser geralmente representada pela seguinte equação: onde a distância hiperfocal (H) é a distância mais próxima na qual um sistema de lente pode ser focalizado enquanto mantém os objetos no infinito aceitavelmente nítidos. Normalmente, quando a lente está focalizada na distância hiperfocal, todos os objetos em distâncias a partir da metade da distância hiperfocal até o infinito serão aceitavelmente nítidos. A distância hiperfocal de um sistema de imagem pode ser diferente para diferentes configurações (por exemplo, diferentes aberturas) desse sistema de imagem.
onde a distância hiperfocal (H) é a distância mais próxima na qual um sistema de lente pode ser focalizado enquanto mantém os objetos no infinito aceitavelmente nítidos. Normalmente, quando a lente está focalizada na distância hiperfocal, todos os objetos em distâncias a partir da metade da distância hiperfocal até o infinito serão aceitavelmente nítidos. A distância hiperfocal de um sistema de imagem pode ser diferente para diferentes configurações (por exemplo, diferentes aberturas) desse sistema de imagem.
[0020] A relação entre Dn, s e H também pode ser geralmente representada pelas seguintes equações: e a relação entre a profundidade de campo (Df), s e H pode ser geralmente representada pelas seguintes equações:
e a relação entre a profundidade de campo (Df), s e H pode ser geralmente representada pelas seguintes equações:
[0021] Entretanto, qualquer um de uma variedade de critérios adicionais ou alternativos, por exemplo, incluindo uma ou mais equações adaptadas a partir das técnicas de imagem convencionais, pode ser usado para identificar relações entre vários dentre Dn, Df, H e s.
[0022] A frase "configuração focal" refere-se aqui a uma dada configuração de um sistema de lentes, por exemplo, uma de múltiplas configurações possíveis, que é facilitar o fornecimento de um campo de foco correspondente. O campo de foco pode ser o do sistema de lentes sozinho. Alternativamente, o campo de foco pode ser um campo de foco geral fornecido pelo sistema de lentes em combinação com um ou mais outros dispositivos (por exemplo, incluindo uma ou mais lentes, uma estrutura de abertura específica, circuitos para executar software de foco de imagem e/ou semelhante).
[0023] As formas de realização descritas aqui determinam, por exemplo, automaticamente, uma preferência relativa de uma configuração focal sobre outra configuração focal, onde tal determinação é baseada na avaliação de um objeto ou objetos que possam estar em um campo de foco. Salvo indicação em contrário, "objeto identificado" ou "objetos identificados" referem-se aqui a um ou mais objetos que estão em um campo de visão de um sistema de lente e que foram identificados (por exemplo, incluindo ser distinguidos um do outro) como tendo uma distância respectiva a partir de alguma referência, como um ponto localizado em ou sobre um sistema de lentes. Tal um ou mais objetos podem incluir apenas um subconjunto de uma pluralidade maior de objetos observáveis através do sistema de lentes (por exemplo, onde o subconjunto inclui apenas objetos que ocupam pelo menos uma parte mínima do campo de visão).
[0024] Como usado aqui, um "conjunto de objetos em foco" refere-se a um conjunto daqueles um ou mais objetos identificados que estão, ou estariam, focado como observado com o sistema de lentes durante uma configuração focal particular dos mesmos. Várias configurações focais do sistema de lentes podem, portanto, corresponder a diferentes conjuntos de objetos em foco. De um ou mais objetos em um determinado conjunto de objetos em foco, um objeto que está mais próximo do sistema de lentes pode ser referido como um "objeto em foco mais próximo", ao passo que um objeto que está mais distante do sistema de lentes é referido como um "objeto focado mais distante". Assim, vários conjuntos de objetos em foco podem compreender diferentes objetos em foco mais próximos e/ou objetos em foco mais distantes. Uma "contagem de objetos em foco" (por brevidade, também referida aqui como "contagem de objetos") refere-se aqui a um número total do um ou mais objetos em um conjunto de objetos em foco.
[0025] A FIG. 1 ilustra elementos de um sistema 100, de acordo com uma forma de realização, para determinar uma configuração focal a ser implementada para uso em uma operação de captura de imagem. O sistema 100 é apenas um exemplo de uma forma de realização configurada para determinar, com base nas respectivas distâncias de objetos que estão dentro de um campo de visão, uma preferência de uma configuração focal sobre outra configuração focal. Tal preferência pode ser determinada, por exemplo, com base nas pontuações calculadas para cada uma das configurações focais. As pontuações podem ser iguais ou baseadas em uma contagem respectiva de objetos em foco associada a um campo de foco correspondente.
[0026] Na forma de realização ilustrativa mostrada, o sistema 100 inclui um sistema de lentes 110 compreendendo uma ou mais lentes, tal como a lente ilustrativa 112 mostrada, para receber luz 105 a partir de um ambiente externo. O sistema de lentes 110 pode incluir qualquer um de uma variedade de dispositivos ópticos que acomodam uma capacidade de foco ajustável. Um tal dispositivo óptico pode ser controlado, com base nas técnicas aqui descritas, utilizando um ou mais mecanismos de ajuste de foco adaptados a partir da tecnologia convencional de foco automática.
[0027] O sistema de lentes 110 pode ser acoplado opticamente à luz direta 105 a partir do ambiente externo em direção a um sensor de imagem 120 do sistema 100, por exemplo, onde a saída de luz pelo sistema de lentes 110 é focalizada através de uma abertura 122 em um arranjo de pixels 124. O arranjo de pixels de 124 pode incluir pixels de semicondutor de metal-óxido complementar (CMOS) e/ou qualquer um de uma variedade de outros pixels adaptados a partir das técnicas convencionais de detecção de imagem. Algumas formas de realização não limitadas a uma arquitetura de arranjo de pixels específica para uso na geração de dados de imagem com base na luz 105. Em algumas formas de realização, uma configuração do sistema de lentes 110 é para ser determinada dado um tamanho particular de abertura 122, por exemplo, em que o sensor de imagem 120 é um dispositivo de abertura fixa ou em que uma configuração focal é para ser selecionada a partir de uma pluralidade de possíveis configurações focais para uso em combinação com um tamanho particular de abertura 122.
[0028] Por exemplo, o sistema 100 pode ainda compreender um sensor de distância 140 configurado para operar como um telêmetro para detectar objetos em um campo de visão que é observável com o sistema de lentes 110. A detecção de distâncias de objeto com o sensor de distância 140 pode incluir uma ou mais operações adaptadas a partir das técnicas convencionais de telemetria, que não estão aqui detalhadas para evitar a obscurecimento de características de várias formas de realização. A título de ilustração e não de limitação, o sensor de distância 140 pode fornecer a funcionalidade de um telêmetro a laser, um telêmetro ultrassônico ou um telêmetro infravermelho. Outros meios para a detecção de alcance são possíveis, como detecção e telemetria por luz (LIDAR), detecção e telemetria por rádio (RADAR), telemetria por micro-ondas, etc.
[0029] O sensor de distância 140 pode ser acoplado para emitir sinais 142 para o circuito de avaliação de distância 150 do sistema 100. O circuito de avaliação de distância 150 pode compreender lógica, por exemplo, incluindo um circuito integrado específico de aplicação (ASIC), circuito de processador, máquina de estado e/ou outro hardware semicondutor, configurado para detectar, com base nos sinais 142, que múltiplos objetos estão em um campo de visão observável através do sistema de lentes 110. Alguns ou todos esses objetos podem ser distinguíveis uns dos outros por diferentes distâncias respectivas a partir do sistema 100.
[0030] A telemetria com o sensor de distância 140 e o circuito de avaliação de distância 150 pode incluir técnicas de detecção ativa, técnicas de detecção passiva (por exemplo, incluindo detecção de fase, medição de contraste e/ou similares) ou uma combinação das mesmas. Em uma forma de realização, o circuito de avaliação de distância 150 pode identificar, para cada objeto de uma pluralidade de objetos, uma distância respectiva a esse objeto em relação a alguma localização de referência dentro ou no sistema 100. Esta identificação pode basear-se, por exemplo, em uma resposta de limite a um laser e/ou outra saída de sinal de telemetria a partir do sensor de distância 140. Tal resposta de limite mínimo pode limitar a pluralidade de objetos identificados àqueles objetos que ocupam pelo menos alguma quantidade de limite mínimo do campo de visão. Alternativamente ou adicionalmente, tal resposta de limite mínimo pode limitar a pluralidade de objetos identificados àqueles objetos no campo de visão que estão dentro de alguma distância de limite máximo a partir do sistema 100.
[0031] Embora algumas formas de realização não sejam limitadas a este respeito, o sensor de distância 140 pode fornecer funcionalidade de telemetria direcional que identifica, para diferentes partes respectivas do campo de visão, uma distância para um respectivo objeto, pelo menos parte do qual ocupa essa porção do campo de visão. Por exemplo, o sensor de distância 140 pode ser operado para varrer sequencialmente (ou de outro modo) o campo de visão, onde os correspondentes sinais de resposta, recebidos pelo sensor de distância 140 em sequência, estão associados cada um com uma porção respectiva diferente do campo de visão. Em uma tal forma de realização, os circuitos de avaliação de distância 150 podem corresponder a várias distâncias de objeto, cada uma com uma porção respectiva diferente do campo de visão.
[0032] O sistema 100 pode ainda compreender circuitos de seleção 160 acoplados para receber, a partir de circuito de avaliação de distância 150, informações que especificam ou de outro modo indicam as respectivas distâncias da pluralidade de objetos a partir do sistema 100. O circuito de seleção 160 pode compreender lógica, por exemplo, incluindo um ASIC, circuitos de processador e/ou semelhantes, para determinar, com base em tais distâncias de objetos, uma configuração focal para implementar com o sistema de lentes 110. Tal determinação pode incluir circuitos de seleção 160 identificando uma preferência relativa de alguma primeira configuração focal sobre uma segunda configuração focal. Essa preferência pode ser baseada, por exemplo, na determinação de que a primeira configuração focal, em comparação com a segunda configuração focal, resultaria em um maior número e/ou melhor disposição (indicada por alguma pontuação ou outra métrica) de objetos em foco.
[0033] Em uma forma de realização ilustrativa, o circuito de seleção 160 inclui ou tem acesso à informação de referência que descreve uma ou mais relações entre uma distância focal, profundidade próxima de campo (Dn), profundidade afastada de campo (Df), hiperfocal distância (H) e/ou qualquer uma das várias outras características ópticas a serem fornecidas com o sistema de lentes 100. A título ilustrativo e não limitativo, o circuito de seleção 160 pode compreender ou estar acoplado a uma memória 130 que é pré-programada com essa informação de referência, por exemplo, por um fabricante, varejista, serviço de rede de computadores ou outro agente. Com base nos dados de distância de objeto a partir dos circuitos de avaliação de distância 150, os circuitos de seleção 160 podem acessar informação de referência na memória 130 para selecionar, calcular e/ou de outra forma determinar, para uma dada distância de um objeto, um número total de objetos que estão (ou estariam) em foco durante uma configuração focal correspondente do sistema de lentes 110. Por exemplo, a configuração focal pode corresponder ao objeto em questão sendo localizado a uma profundidade próxima de campo a ser fornecida com o sistema de lentes 110.
[0034] Baseado em uma avaliação de múltiplas configurações focais possíveis, o circuito de seleção 160 pode emitir um sinal 162 que identifica ou indica uma configuração focal que foi determinada como preferida em pelo menos uma configuração focal alternativa. Em resposta ao sinal 162, um controlador de foco (FC) 170 do sistema 100 pode ajustar ou, de outro modo, configurar um campo de foco a ser implementado com o sistema de lentes 110. O FC 170 pode incluir qualquer um de uma variedade de um ou mais mecanismos de hardware e/ou software para alterar uma distância focal efetiva fornecida com o sistema de lentes 110. A título ilustrativo e não limitativo, o FC 170 pode incluir um motor para mover as lentes do sistema de lentes 110 em relação umas às outras e/ou em relação ao arranjo de pixels 124. Alternativamente ou adicionalmente, o FC 170 pode incluir lógica (por exemplo, incluindo um ASIC, processador, software de execução e/ou similar) que, por exemplo, é para implementar pelo menos em parte um campo de foco por meio de cálculos de processamento de imagem. Baseado no sinal 162, FC 170 pode implementar uma configuração focal que fornece uma profundidade de campo particular com o sistema de lentes 110. Durante tal configuração focal, o sensor de imagem 120 pode ser operado, por exemplo, responsivo aos circuitos de seleção 160 e/ou FC 170, para capturar uma imagem do ambiente externo.
[0035] Embora algumas formas de realização não sejam limitadas a este respeito, os circuitos de avaliação de distância 150 podem ainda incluir ou ser acoplados a circuitos de reconhecimento de imagem (não mostrados) que são configurados para receber e processar informação de imagem gerada pelo arranjo de pixels 124 com base na luz recebida via sistema de lentes 110. Tal circuito de reconhecimento de imagem pode, por exemplo, ser pré- programado com (ou ter acesso a) outras informações de referência que descrevem uma ou mais classes de objetos. Com base nessas outras informações de referência, o circuito de reconhecimento de imagem pode avaliar os sinais da matriz de pixels 124 para determinar se qualquer região do campo de visão inclui uma representação de algum objeto pertencente a uma classe de objeto predefinida. Alguns exemplos de classes de objetos incluem, mas não estão limitados a, uma classe de olho, classe de boca, classe de cabeça, classe de automóvel, classe de construção e/ou similares. A identificação de um ou mais objetos de uma classe de objeto pode incluir operações adaptadas a partir das técnicas convencionais de reconhecimento de imagem. Em uma forma de realização, uma ou mais distâncias do objeto variadamente indicadas por sinais 142 podem, cada uma, ser associadas a um respectivo objeto que é identificado como pertencente a uma classe de objeto correspondente.
[0036] Resumindo, o dispositivo (sistema 100) mostrado na FIG. 1 pode compreender uma combinação de pelo menos alguns dos seguintes elementos: um sistema de lentes 110 para receber luz a partir de um ambiente externo ao dispositivo; circuito de avaliação de distância 150 configurado para identificar respectivas distâncias para cada um de uma pluralidade de objetos incluindo pelo menos um primeiro objeto e um segundo objeto, em que o circuito de avaliação de distância 150 pode ser acoplado a um sensor de distância 140 para processar sinais de saída 142 do sensor de distância 140 e para determinar a distância de um respectivo objeto com base na avaliação dos sinais 142; circuito de seleção 160 acoplado ao circuito de avaliação de distância 150 para determinar um foco do sistema de lente 110, o circuito de seleção 160 incluindo uma lógica que, quando executada, faz com que o dispositivo (sistema 100) realize operações incluindo: determinar uma primeira contagem de qualquer um da pluralidade de objetos em foco, enquanto o primeiro objeto está em uma primeira profundidade próxima Dn de campo, devido a uma primeira configuração focal (por exemplo, uma determinada configuração do sistema de lentes 110) e devido a uma primeira abertura 122 (por exemplo, tamanho da primeira abertura 122 que focaliza a luz em um arranjo de pixels 124 de um sensor de imagem 120 acoplado opticamente ao sistema de lentes 110 para capturar uma imagem recebida com o sistema de lentes 110); determinar uma segunda contagem de qualquer um da pluralidade de objetos em foco, enquanto o segundo objeto está em uma segunda profundidade próxima Dn de campo, devido a uma segunda configuração focal e devido à primeira abertura; comparar uma primeira pontuação com base na primeira contagem e uma segunda pontuação com base na segunda contagem; e fornecer, com base na comparação, um sinal 162 que indica uma preferência entre a primeira configuração focal ou a segunda configuração focal.
[0037] Aqui, a primeira ou segunda pontuação de uma primeira/segunda contagem pode ser baseada em um valor da primeira contagem ou em um valor da segunda contagem, respectivamente. Por exemplo, uma pontuação respectiva pode ser derivada de uma contagem ponderada associada em que os objetos individuais incluídos na contagem podem receber pesos diferentes. Se tais pesos forem negligenciados, a primeira pontuação e a segunda pontuação podem ser iguais à primeira contagem e à segunda contagem, respectivamente. Caso contrário, uma pontuação pode ser baseada, pelo menos em parte, em um valor ponderado que tenha sido atribuído a um objeto no campo de visão.
[0038] Além disso, o dispositivo pode compreender um controlador de foco 170 acoplado para ajustar o sistema de lentes 110 com base no sinal 162.
[0039] As operações que podem ser realizadas pelo dispositivo (sistema 100) também definem um método para fornecer uma capacidade de foco automático com base na informação de distância de objeto que será descrita em mais detalhes abaixo para uma forma de realização e que pode ser implementada executando instruções correspondentes armazenadas em um meio de armazenamento não transitório legível por computador.
[0040] A FIG. 2 ilustra elementos de um método 200 para determinar uma configuração focal do sistema de lentes de acordo com uma forma de realização. Para ilustrar certas características de várias formas de realização, o método 200 é aqui descrito com referência a um exemplo de cenário ilustrado nas FIGs. 3A, 3B. FIG. 3A mostra uma vista lateral de topo de um ambiente 300 no qual um dispositivo sensor de imagem 310 deve operar de acordo com uma forma de realização. A FIG. 3B mostra uma vista 350 de várias distâncias, conforme projetada em uma única linha 360, do dispositivo sensor de imagem 310 para os respectivos objetos no ambiente 300. O método 200 pode ser executado com um ou mais componentes do dispositivo sensor de imagem 310, por exemplo, em que o dispositivo sensor de imagem 310 inclui algumas ou todas as características do sistema 100. No entanto, outras formas de realização incluem o método 200 a ser realizado por qualquer um de uma variedade de outros dispositivos sensor de imagem com as características aqui descritas.
[0041] Em uma forma de realização, o método 200 inclui, em 210, identificar distâncias respectivas para cada um de uma pluralidade de objetos em um campo de visão de um sistema de lente. Por exemplo, como mostrado na FIG. 3A, o dispositivo sensor de imagem 310 pode ser posicionado (localizado e orientado) de tal modo que alguns objetos múltiplos, tais como os seis objetos ilustrativos A a F mostrados, estão cada um no campo de visão 320 (por exemplo, entre linhas de visão 322, 324) que é observável através de um sistema de lentes 312 do dispositivo sensor de imagem 310. Os objetos de A a F não estão limitando a algumas formas de realização, e o dispositivo sensor de imagem 310 pode ser configurado para executar o método 200 com base em mais, menos objetos, e/ou objetos dispostos de modo diferente.
[0042] Posições de objetos no campo de visão 320 podem ser identificadas pelo menos em parte com referência, por exemplo, a um sistema de coordenadas polares (por exemplo, parte de um sistema de coordenadas cilíndricas ou esféricas) compreendendo uma dimensão de distância x e uma dimensão radial θ. No cenário ilustrativo mostrado, o campo de visão 320 localizou o objeto A no local (x1, θ4), objeto B no local (x2, θ3), objeto C no local (x3, θ2), objeto D no local (x4, θ5), objeto E no local (x5, θ6) e objeto F no local (x6, θ1). No cenário de exemplo mostrado na FIG. 3 A, objetos A a F estão cada um em um plano bidimensional. No entanto, será apreciado que alguns ou todos esses objetos podem estar localizados em diferentes alturas verticais em um espaço tridimensional, por exemplo, onde o componente de altura vertical da localização de um objeto pode resultar em alguma distância adicional entre o objeto e o sensor de imagem. 310. A determinação em 210 pode incluir, por exemplo, identificar as distâncias xl, x2, x3, x4, x5, x6, por exemplo, onde tal identificação é realizada com circuitos de avaliação de distância 150 com base nos sinais 142.
[0043] O método 200 pode ainda compreender a realização de uma primeira determinação de uma configuração focal a ser implementada (com o sistema de lentes 312, no exemplo da figura 3A). Tal determinação, também referida aqui como uma "primeira determinação de foco" por brevidade, pode determinar um foco do sistema de lentes, por exemplo, incluindo operações para fornecer uma avaliação comparativa de pelo menos duas configurações focais baseadas nas respectivas contagens de objetos em foco. Por exemplo, a primeira determinação de foco pode incluir, em 220, determinar uma primeira contagem de qualquer um dos vários objetos em foco, enquanto um primeiro objeto da pluralidade de objetos está em uma primeira profundidade próxima de campo, devido a uma primeira configuração focal do sistema de lentes e a uma primeira abertura (isto é, um tamanho de abertura particular que pode ser fixo ou, alternativamente, ajustável). A primeira contagem pode representar um primeiro número total de qualquer um da pluralidade de objetos que apareceria em foco se observado com o sistema de lentes, enquanto o primeiro campo de foco é implementado com a primeira configuração focal e a primeira abertura.
[0044] A primeira determinação de foco pode ainda compreender, em 230, a determinação de uma segunda contagem de qualquer um da pluralidade de objetos em foco, enquanto um segundo objeto da pluralidade de objetos está em uma segunda profundidade próxima de campo, devido a uma segunda configuração focal e a primeira abertura. A segunda contagem pode representar um segundo número total de qualquer um da pluralidade de objetos que apareceriam em foco se observados com o sistema de lentes, enquanto o segundo campo de foco é implementado com uma segunda configuração focal do sistema de lentes e com a primeira abertura. A determinação em 230 pode incluir a contagem de um número total de objetos de um segundo conjunto de objetos em foco que corresponde à segunda configuração focal.
[0045] A FIG. 3B ilustra um exemplo de uma determinação de configuração focal (tal como a que inclui a determinação em 220 e 230) que compreende contagem, para cada uma de uma pluralidade de configurações focais, uma contagem respectiva de objetos de um conjunto de objetos em foco que corresponde a essa configuração focal. Essa contagem (referida aqui como uma "contagem de objetos em foco") pode incluir a definição de uma variável de profundidade próxima do campo como igual a uma distância de um objeto específico, e calcular ou determinar um valor de profundidade de campo maior corresponde a, por exemplo, deve ser concorrente com, profundidade próxima de valor do campo. As distâncias identificadas em 210 podem então ser avaliadas para determinar quais objetos estão entre a profundidade próxima de campo e a profundidade afastada de campo correspondente.
[0046] Por exemplo, como mostrado na vista 350, uma determinação de configuração focal pode executar uma primeira contagem de objetos em foco para um campo de foco D1, em que uma profundidade próxima de campo de D1 deve estar na mesma distância (x1-x0) do sensor de imagem 310 como está o objeto A. A primeira contagem de objetos em foco pode determinar que apenas um dos objetos de A a F, isto é, o objeto A, está (ou estaria) em foco quando o sistema de lentes 312 tem uma primeira configuração focal para facilitar o D1. Uma segunda contagem de objetos em foco pode ser realizada para um campo de foco D2 em que uma profundidade próxima de campo de D2 deve estar na mesma distância (x2-x0) do sensor de imagem 310 como está o objeto B. A segunda contagem de objetos em foco pode determinar que um total de três dos objetos, isto é, objetos B, C e D, estão ou estariam em foco quando o sistema de lentes 312 tiver uma segunda configuração focal para facilitar D2.
[0047] A determinação da configuração focal pode ainda realizar uma terceira contagem de objetos em foco para um campo de foco D3 em que uma profundidade próxima de campo de D3 deve estar na mesma distância (x3-x0) do sensor de imagem 310 como está o objeto C. A terceira contagem de objetos em foco pode determinar que um total de dois dos objetos, isto é, objetos C e D, estão ou estariam em foco quando o sistema de lentes 312 tiver uma terceira configuração focal para facilitar D3. Uma quarta contagem de objetos em foco pode ser realizada para um campo de foco D4 em que uma profundidade próxima de campo de D4 deve estar na mesma distância (x4-x0) do sensor de imagem 310 como está o objeto D. A quarta contagem de objetos em foco pode determinar que um total de dois dos objetos, isto é, objetos D e E, estão ou estariam em foco quando o sistema de lentes 312 tiver uma quarta configuração focal para facilitar D4.
[0048] A determinação de configuração focal pode ainda realizar uma quinta contagem de objetos em foco para um campo de foco D5 em que uma profundidade próxima de campo de D5 deve estar na mesma distância (x5-x0) do sensor de imagem 310 como está o objeto E. A quinta contagem de objetos em foco pode determinar que apenas um objeto, objeto E, está ou estaria em foco quando o sistema de lentes 312 tiver uma quinta configuração focal para facilitar D5. Uma sexta contagem de objetos em foco pode ser realizada para um campo de foco D6, em que uma profundidade próxima de campo de D6 deve estar na mesma distância (x6-x0) do sensor de imagem 310, como está o objeto F. A sexta contagem de objetos em foco pode determinar que apenas um objeto, isto é, objeto F, está ou estaria em foco quando o sistema de lentes 312 tiver uma sexta configuração focal para facilitar D6. As respectivas profundidades de campo de D1-D6 podem ser substancialmente iguais, por exemplo, dentro de 10% um do outro e, em algumas formas de realização, dentro de 5% um do outro.
[0049] A determinação da configuração focal realizada pelo modo 200 pode ainda compreender, em 240, realizar uma comparação de uma primeira pontuação baseada na primeira contagem determinada em 220 e uma segunda pontuação baseada na segunda contagem determinada em 230. Por exemplo, a primeira pontuação e a segunda pontuação podem ser iguais à primeira contagem e à segunda contagem, respectivamente. Em outra forma de realização, uma pontuação pode ser baseada, pelo menos em parte, em um valor ponderado que tenha sido atribuído a um objeto no campo de visão. A atribuição de tal valor ponderado pode ser baseada, por exemplo, em uma localização do objeto em questão no campo de visão. A título ilustrativo e não limitativo, um valor de ponderação pode ser atribuído a um objeto baseado, pelo menos em parte, em uma localização do objeto em relação a um ponto de referência ou uma linha de referência (por exemplo, um centro, uma linha média, uma borda e/ou um canto) do campo de visão.
[0050] Alternativamente ou adicionalmente, tal valor de ponderação pode ser atribuído ao objeto baseado, pelo menos em parte, na sua posição no campo de visão em relação a um ou mais outros objetos que também estão no campo de visão. Tal valor de ponderação pode adicionalmente ou alternativamente ser atribuído com base, pelo menos em parte, em um tipo de classe de objeto que tenha sido identificado, por processamento de reconhecimento de imagem, como correspondente ao objeto.
[0051] Com base em um resultado da comparação realizada em 240, o método 200 pode ainda compreender, em 250, fornecer um sinal indicando uma preferência entre a primeira configuração focal ou a segunda configuração focal. Por exemplo, o sinal pode especificar ou indicar de outro modo que a primeira configuração focal deve ser preferida à segunda configuração focal. O sinal fornecido em 250 pode indicar que o primeiro campo de foco, a ser fornecido com a primeira configuração focal, resultará em um número maior de, e/ou uma pontuação ponderada melhor para, objetos em foco, em comparação a um segundo campo de foco que poderia ser fornecido pela segunda configuração focal.
[0052] Referindo-se novamente ao cenário de exemplo mostrado na FIG. 3B, o sinal em 250 pode indicar uma preferência pela configuração focal que facilita D2 em relação ao à configuração focal que facilita o D1. Tal sinal pode identificar a configuração focal que, de uma pluralidade de tais configurações, resultará no maior número de objetos em foco. Em algumas formas de realização, o sinal fornecido em 250 pode ser gerado independentemente de qualquer contagem de objetos que devem estar em foco enquanto cada um da pluralidade de objetos é deslocado a partir de uma profundidade próxima de campo, por exemplo, independente de qualquer determinação de uma contagem de objeto em foco que corresponde a uma configuração focal diferente de uma que é para colocar um da pluralidade de objetos em uma profundidade próxima de campo. Por exemplo, uma determinação de configuração focal realizada para os objetos A a F no campo de visão 320 pode incluir a execução de apenas seis contagens de objetos em foco, isto é, cada um para um respectivo dos campos de foco D1 a D6 mostrados.
[0053] Técnicas convencionais para determinar a focagem da lente varre de forma variada através de uma gama de distâncias focais, realizando cálculos respectivos para cada um de um grande conjunto de campos de foco. Esse conjunto maior normalmente inclui muitos campos de foco para os quais nenhum objeto identificado está (ou estaria) localizado na profundidade próxima de campo. Pelo contrário, algumas formas de realização calculam as pontuações para um conjunto relativamente menor e mais particular de campos de foco, por exemplo, o número total dos quais pode não ser mais do que um número total da pluralidade de objetos. A avaliação comparativa de apenas D1 a D6, por exemplo, sem também avaliar muitos outros campos intermediários de foco, cada um entre os respectivos de D1 a D6, ilustra uma eficiência obtida por muitas dessas formas de realização. Em comparação com técnicas convencionais, tais formas de realização são mais eficientes fornecendo processamento relativamente mais simples e, assim, mais rápido, para avaliar campos de foco.
[0054] Embora algumas formas de realização não sejam limitadas a este respeito, o método 200 pode compreender uma ou mais operações adicionais (não mostradas) para operar um dispositivo sensor de imagem com base no sinal fornecido em 250. Por exemplo, o método 200 pode ainda compreender a configuração do sistema de lentes com base no sinal fornecido em 250, por exemplo, em que o sistema de lentes implementa a primeira configuração para localizar em uma profundidade próxima de campo o primeiro objeto. Em tal forma de realização, um objeto diferente do primeiro objeto pode ser um objeto mais próximo (de toda a pluralidade de objetos) ao conjunto de lentes. Depois de configurar o sistema de lentes, o método 200 pode ainda operar um arranjo de pixels para capturar uma imagem recebida com o sistema de lentes. Embora algumas formas de realização não sejam limitadas a este respeito, o método 200 pode ser repetido uma ou mais vezes, por exemplo, incluindo circuitos de seleção 160 (por exemplo) realizando uma ou mais determinações de foco adicionais de uma pluralidade de determinações de foco incluindo a primeira determinação de foco. Por exemplo, algumas ou todas essas pluralidades de determinações de foco podem, cada uma, corresponder a uma abertura respectiva diferente que é para operar com o sistema de lentes.
[0055] A FIG. 4 ilustra elementos de um método 400 para determinar uma configuração focal de acordo com uma forma de realização. O método 200 pode ser executado com o sistema 100 ou com o dispositivo sensor de imagem 310, por exemplo. Em uma forma de realização, o método 200 inclui algumas ou todas as características do método 200.
[0056] Na forma de realização ilustrativa mostrada, o método 400 inclui operações para inicializar variáveis usadas na determinação de uma configuração focal preferida. A título de ilustração e não de limitação, tais operações podem incluir, em 405, definir como zero cada uma de uma variável Dmax representando um campo próximo de foco atualmente preferido e outra variável Nmax representando uma contagem de objetos em foco correspondente a Dmax. As operações em 405 podem adicionalmente ou alternativamente incluir a configuração de uma variável de contador x para um valor inicial, por exemplo, um (1).
[0057] O método 400 pode ainda compreender, em 410, a determinação de uma distância dx do x-ésimo objeto (onde x- ésimo é um ordinal correspondente a um valor atual da variável x) de uma pluralidade de objetos que foram determinados dentro de um campo de visão que é observável através de um sistema de lentes. A distância dx pode ser determinada em relação a um local de referência, tal como um ponto central dentro ou sobre uma lente do sistema de lentes. No 415, o método 400 pode determinar um valor Nx representando uma contagem de objetos em foco, isto é, uma contagem de objetos que estão (ou estariam) em foco enquanto o sistema de lentes tem uma configuração focal que coloca o x-ésimo objeto em um campo próximo de foco. A determinação em 415 pode incluir uma ou mais operações tais como as da determinação em 220 ou a determinação em 230, por exemplo.
[0058] O método 400 pode ainda incluir determinar, em 420, se o valor Nx mais recentemente determinado em 415 é maior do que um valor atual de Nmax. Onde é determinado em 420 que Nmax é maior que o valor atual de Nmax, o método 400 pode executar operações, em 425, incluindo o ajuste de Nmax para ser igual ao valor mais recentemente determinado de Nx. As operações em 425 podem ainda compreender o ajuste de Dmax para ser igual ao valor mais recentemente determinado de Dn. Subsequentemente, uma determinação pode ser feita, em 430, quanto a se qualquer outro objeto da pluralidade de objetos permanece para ser endereçado pelo método 400. Onde, em vez disso, é determinado em 420 que Nmax é menor que (ou igual a, em algumas formas de realização) o valor atual de Nmax, o método 400 pode abrir uma instância das operações em 425 e prosseguir para a determinação em 430.
[0059] Em resposta a uma determinação em 430 de que cada um da pluralidade de objetos foi endereçada, o método 400 pode prosseguir, ou ser seguido por, operações subsequentes (não mostradas) para implementar no sistema de lentes uma configuração focal que fornece uma profundidade próxima de campo igual ao valor mais recente de Dmax. Onde, em vez disso, é determinado em 430 que pelo menos um dentre a pluralidade de objetos não foi endereçado, o método 400 pode incrementar o contador x, em 435, e prosseguir para executar (para o valor recém incrementado de x) outra instância da determinação em 410.
[0060] Em uma forma de realização, o x-ésimo objeto inicial, isto é, um primeiro objeto, da pluralidade de objetos a serem endereçados pelo método 400 é um objeto mais próximo da pluralidade de objetos para o sistema de lentes. Cada próximo x-ésimo objeto a ser endereçado pelo método 400 pode, por exemplo, ser um próximo objeto mais distante do sistema de lentes. Em tal forma de realização, uma ou mais condições de teste adicionais (não mostradas) podem ser avaliadas para determinar se uma saída do método 400 deve ser executada.
[0061] A título de ilustração e não de limitação, uma saída antecipada do método 400 pode ser executada em resposta a uma determinação, por exemplo, em 420, que Nx representa o x-ésimo objeto e todos os outros objetos (da pluralidade de objetos) que são mais longe do sistema de lentes do que o x-ésimo objeto. Alternativamente ou adicionalmente, uma saída antecipada do método 400 pode ser executada em resposta a uma determinação, por exemplo, em 420, de que qualquer avaliação subsequente de Nx não poderia ser maior que o valor atual de Nmax (por exemplo, objetos sucessivamente de acordo com a ordem crescente de suas respectivas distâncias do sistema de lentes).
[0062] A FIG. 5 ilustra características de uma forma de realização em que uma configuração focal de um sistema de lentes é determinada com base nas pontuações respectivas para objetos em um campo de visão, em que as pontuações são por sua vez determinadas com base em diferentes valores de peso atribuídos a vários dos objetos. Tal determinação pode ser realizada, por exemplo, por um sistema 100 ou dispositivo sensor de imagem 310, por exemplo, de acordo com um dos métodos 200, 400.
[0063] A FIG. 5 mostra uma vista lateral superior de um ambiente 500 no qual um dispositivo sensor de imagem 510 deve operar de acordo com uma forma de realização. Como mostrado na FIG. 5, o dispositivo sensor de imagem 510 pode ser posicionado (localizado e orientado) de modo que objetos, por exemplo, a pluralidade ilustrativa dos objetos A até F mostrados, estão cada um no campo de visão 520, entre as linhas de visão 522, 524, que é observável através de um sistema de lentes 512 do dispositivo sensor de imagem 510. O dispositivo sensor de imagem 510 pode ser posicionado para, adicionalmente ou alternativamente, criar imagens em mais, menos objetos e/ou objetos dispostos de maneira diferente, em várias formas de realização.
[0064] A inserção da FIG. 5 mostra um exemplo da vista 550 dos objetos A a F (sendo pessoas, no cenário ilustrativo) que estão dentro do campo de visão 520, a vista 550 como vista através do sistema de lentes 512. Uma configuração focal para o sistema de lentes 512 pode ser determinada, por exemplo, com base em parte das respectivas distâncias x1 até x6, dos objetos A a F do sistema de lentes 512. Em algumas formas de realização, tal determinação de uma configuração focal pode ser adicionalmente baseada nas localizações respectivas de alguns ou todos os objetos A a F na vista 550.
[0065] Por exemplo, informações de referência pré- programadas, por exemplo, armazenadas na memória 130, podem corresponder a diferentes regiões de visão 550, cada uma com um valor respectivo indicando um grau de valor colocado em objetos naquela região. Na forma de realização ilustrativa mostrada, essas regiões incluem uma região 554 na qual está localizado um centro de visão 550 (o centro alinhado com a linha central 526 do campo de visão 520). As regiões podem ainda incluir uma região 556 adjacente e estendendo-se em torno da região 554, bem como outra região 558 adjacente e estendendo-se em torno da região 556. Ainda outra região em torno de 558 pode se estender para uma borda 552 da vista 550.
[0066] Para uma dada dessas regiões, um objeto identificado como estando na região pode receber um peso que seja igual ou de outro modo baseado no valor de preferência predefinido associado a essa região. Na forma de realização ilustrativa mostrada, pode ser atribuído ao objeto A um primeiro peso correspondente à região 554, e cada objeto B, C e D pode receber um segundo peso correspondente à região 558. Os objetos E e F podem receber, cada um, um terceiro peso correspondente à região que une e circunda a região 558.
[0067] Uma pontuação Sx pode ser calculada para uma dada configuração focal Cx do sistema de lentes 512, por exemplo, onde Cx fornece uma profundidade próxima de campo que é igual à distância do x-ésimo objeto da pluralidade de objetos do sistema de lentes 512. Em uma forma de realização, um valor Sx pode ser calculado de acordo com o seguinte: em que I é um número inteiro igual a um número total da pluralidade de objetos, Bix é um valor Boolean que é igual a "1" se o z-ésimo objeto está ou estaria em foco durante Cx (e igual a "0" caso contrário) e Wi é um valor de ponderação associado à região de visualização 550 na qual o z-ésimo objeto está localizado. Em algumas outras formas de realização, um dado valor de ponderação Wi pode ser adicional ou alternativamente determinado com base em um tipo de objeto ao qual pertence um objeto z-ésimo correspondente. A título de ilustração e não de limitação, um valor de ponderação Wi pode ser relativamente mais significativo quando o processamento de reconhecimento de imagem identificou o z-ésimo objeto correspondente como sendo uma instância de um tipo de objeto de face humana (ou parte dele). A atribuição de pesos específicos aos respectivos objetos pode ser baseada em qualquer uma de uma ampla variedade de preferências de tipo de objeto possíveis que são pré-programadas ou determinadas previamente, por exemplo, por um fabricante, varejista, usuário ou outro agente. Em uma forma de realização ilustrativa, um peso relativamente mais significativo (por exemplo, maior valor) pode ser atribuído a objetos de um tipo de objeto de face humana, em comparação com um ou mais tipos de objetos alternativos. No entanto, as técnicas pelas quais tais preferências devem ser determinadas podem depender de detalhes específicos da implementação, e podem não ser limitantes em algumas formas de realização. Em contraste com uma contagem de objetos em foco, um valor Sx (ou um valor Wi) pode ser um número diferente de qualquer número inteiro, por exemplo. A equação (6) é apenas um exemplo de cálculo para determinar Sx para um dado x-ésimo objeto. Qualquer um de uma variedade de outros cálculos para determinar um valor de Sx pode ser realizada, de acordo com diferentes formas de realização.
em que I é um número inteiro igual a um número total da pluralidade de objetos, Bix é um valor Boolean que é igual a "1" se o z-ésimo objeto está ou estaria em foco durante Cx (e igual a "0" caso contrário) e Wi é um valor de ponderação associado à região de visualização 550 na qual o z-ésimo objeto está localizado. Em algumas outras formas de realização, um dado valor de ponderação Wi pode ser adicional ou alternativamente determinado com base em um tipo de objeto ao qual pertence um objeto z-ésimo correspondente. A título de ilustração e não de limitação, um valor de ponderação Wi pode ser relativamente mais significativo quando o processamento de reconhecimento de imagem identificou o z-ésimo objeto correspondente como sendo uma instância de um tipo de objeto de face humana (ou parte dele). A atribuição de pesos específicos aos respectivos objetos pode ser baseada em qualquer uma de uma ampla variedade de preferências de tipo de objeto possíveis que são pré-programadas ou determinadas previamente, por exemplo, por um fabricante, varejista, usuário ou outro agente. Em uma forma de realização ilustrativa, um peso relativamente mais significativo (por exemplo, maior valor) pode ser atribuído a objetos de um tipo de objeto de face humana, em comparação com um ou mais tipos de objetos alternativos. No entanto, as técnicas pelas quais tais preferências devem ser determinadas podem depender de detalhes específicos da implementação, e podem não ser limitantes em algumas formas de realização. Em contraste com uma contagem de objetos em foco, um valor Sx (ou um valor Wi) pode ser um número diferente de qualquer número inteiro, por exemplo. A equação (6) é apenas um exemplo de cálculo para determinar Sx para um dado x-ésimo objeto. Qualquer um de uma variedade de outros cálculos para determinar um valor de Sx pode ser realizada, de acordo com diferentes formas de realização.
[0068] Algumas formas de realização podem calcular os respectivos valores de Sx para dois ou mais de, por exemplo, cada um dos, objetos que são identificados como localizados no campo de visão. O sistema de lentes 512 pode ser subsequentemente configurado com base em tal avaliação de tais pontuações. Por exemplo, uma configuração focal do sistema de lentes 512 pode ser implementado com base nessa configuração focal tendo um maior valor de Sx. Em alguns cenários, duas ou mais configurações focais podem ter o mesmo valor de Sx, por exemplo, onde esse valor de Sx é maior que quaisquer outros valores de Sx calculados. Em uma tal forma de realização, uma das duas ou mais configurações focais pode ser selecionada para implementação com base nessa configuração focal tendo uma distância focal mais curta, em comparação com as outras das duas ou mais configurações focais.
[0069] As técnicas e arquiteturas para operar um dispositivo óptico são aqui descritas. Algumas porções da descrição detalhada aqui apresentada são apresentadas em termos de algoritmos e representações simbólicas de operações em bits de dados dentro de uma memória de computador. Estas descrições e representações algorítmicas são os meios utilizados pelos técnicos no assunto da computação para transmitir de forma mais eficaz a substância do seu trabalho a outros técnicos no assunto. Um algoritmo é aqui e, em geral, concebido para ser uma sequência de etapas auto consistente que leva a um resultado desejado. As etapas são aquelas que exigem manipulações físicas de quantidades físicas. Normalmente, embora não necessariamente, essas quantidades assumem a forma de sinais elétricos ou magnéticos capazes de serem armazenados, transferidos, combinados, comparados e manipulados de qualquer outra forma. Tem-se mostrado conveniente às vezes, principalmente por motivos de uso comum, referir-se a esses sinais como bits, valores, elementos, símbolos, caracteres, termos, números ou similares.
[0070] Deve-se ter em mente, entretanto, que todos esses termos e similares devem ser associados às quantidades físicas apropriadas e são meramente rótulos convenientes aplicados a essas quantidades. A menos que especificamente indicado de outro modo como aparente da discussão aqui, é apreciado que ao longo da descrição, discussões utilizando termos tais como "processamento" ou "computação"ou "cálculo"ou "determinação"ou "exibição"ou similares, referem-se à ações e processos de um sistema de computador, ou dispositivo de computação eletrônica semelhante, que manipule e transforme dados representados como quantidades físicas (eletrônicas) nos registros e memórias do sistema de computador em outros dados representados de forma similar como quantidades físicas dentro de memórias ou registros do sistema de computador ou outros tais dispositivos de armazenamento, transmissão ou exibição de informações.
[0071] Certas formas de realização também se relacionam com aparelhos para realizar as operações aqui descritas. Este aparelho pode ser especialmente construído para os fins requeridos, ou pode compreender um computador de uso geral seletivamente ativado ou reconfigurado por um programa de computador armazenado no computador. Tal programa de computador pode ser armazenado em um meio de armazenamento legível por computador, tal como, mas não limitado a, qualquer tipo de disco incluindo disquetes, discos ópticos, CD-ROMs e discos magneto-ópticos, memórias somente de leitura (ROMs), memórias de acesso aleatório (RAMs), como RAM dinâmica (DRAM), EPROMs, EEPROMs, cartões magnéticos ou ópticos, ou qualquer tipo de mídia adequada para armazenar instruções eletrônicas e acopladas a um barramento de sistema de computador.
[0072] Os algoritmos e exibições aqui apresentados não estão inerentemente relacionados com qualquer computador particular ou outro aparelho. Vários sistemas de uso geral podem ser usados com programas de acordo com os ensinamentos aqui, ou pode ser conveniente construir aparelhos mais especializados para executar as etapas do método requeridas. A estrutura necessária para uma variedade destes sistemas aparecerá a partir da descrição aqui. Além disso, certas formas de realização não são descritas com referência a qualquer linguagem de programação particular. Será apreciado que uma variedade de linguagens de programação pode ser usada para implementar os ensinamentos de tais formas de realização como aqui descrito.
[0073] Além do que é aqui descrito, várias modificações podem ser feitas para as formas de realização divulgadas e implementações dos mesmos sem sair do seu escopo. Portanto, as ilustrações e exemplos aqui contidos devem ser interpretados de forma ilustrativa e não restritiva. O escopo da invenção deve ser medido unicamente por referência às reivindicações que se seguem.
Claims (22)
1. Dispositivo (100), caracterizadopelo fato de que compreende: um sistema de lentes (110) para receber luz (105) a partir de um ambiente externo ao dispositivo; circuito de avaliação de distância (150) configurado para identificar as respectivas distâncias para cada um de uma pluralidade de objetos incluindo um primeiro objeto e um segundo objeto; circuito de seleção (160) acoplado ao circuito de avaliação de distância (150) para determinar um foco do sistema de lente (110), o circuito de seleção (160) incluindo a lógica que, quando executada, faz com que o dispositivo (100) realize operações incluindo: ajustar o sistema de lentes para ter uma primeira configuração focal e uma primeira abertura na qual o primeiro objeto está em uma primeira profundidade próxima de campo; determinar uma primeira contagem de quaisquer da pluralidade de objetos que está em foco, enquanto o primeiro objeto está na primeira profundidade próxima de campo, devido à primeira configuração focal e à primeira abertura, em que a primeira contagem representa um número de objetos em foco, enquanto o primeiro objeto está na primeira profundidade próxima de campo; ajustar o sistema de lentes para ter uma segunda configuração focal e a primeira abertura na qual o segundo objeto está em uma segunda profundidade próxima de campo; determinar uma segunda contagem onde quaisquer da pluralidade de objetos está em foco, enquanto o segundo objeto está na segunda profundidade próxima de campo, devido à segunda configuração focal e à primeira abertura, em que a segunda contagem representa um número de objetos em foco enquanto o segundo objeto está na segunda profundidade próxima de campo; comparar uma primeira pontuação com base na primeira contagem que resulta da primeira configuração focal e uma segunda pontuação com base na segunda contagem que resulta da segunda configuração focal, para identificar uma preferência entre a primeira configuração focal e a segunda configuração focal com base em qual configuração focal fornece um número maior de objetos em foco; e fornecer, com base na comparação da primeira pontuação com a segunda pontuação, um sinal (162) que indica a preferência entre a primeira configuração focal e a segunda configuração focal com base em qual configuração focal fornece um número maior de objetos em foco; um controlador de foco (170) acoplado para ajustar o sistema de lentes (110) com base no sinal (162); e um sensor de imagem (310) opticamente acoplado para capturar uma imagem recebida com o sistema de lentes (110) após o sistema de lentes ter sido ajustado com base no sinal.
2. Dispositivo, de acordo com a reivindicação 1, caracterizado pelo fato de que o circuito de seleção (160) é configurado para fazer o dispositivo gerar o sinal (162) que indica a preferência entre a primeira configuração focal e a segunda configuração focal independentemente do dispositivo realizar qualquer contagem de objetos em foco enquanto toda a pluralidade de objetos é deslocada de uma profundidade de campo próxima para uma configuração focal presente.
3. Dispositivo, de acordo com a reivindicação 1, caracterizado pelo fato de que o circuito de seleção (160) é configurado para fazer com que o dispositivo determine um ou mais outros focos do sistema de lentes (110) cada um do um ou mais dos outros focos devido em parte a uma abertura respectiva diferente da primeira abertura.
4. Dispositivo, de acordo com a reivindicação 1, caracterizado pelo fato de que o sinal indica a preferência pela primeira configuração focal, e um objeto diferente do primeiro objeto, da pluralidade de objetos, é um objeto mais próximo do conjunto de lentes enquanto o sistema de lentes tem a primeira configuração focal.
5. Dispositivo, de acordo com a reivindicação 1, caracterizado pelo fato de que o circuito de seleção está configurado para fazer com que o dispositivo calcule a primeira pontuação com base em um primeiro valor de ponderação atribuído a um objeto com base em uma localização do objeto no campo de visão (320).
6. Dispositivo, de acordo com a reivindicação 5, caracterizado pelo fato de que a localização do objeto no campo de visão (320) é relativa a um ponto de referência ou a uma linha de referência do campo de visão.
7. Dispositivo, de acordo com a reivindicação 6, caracterizado pelo fato de que o ponto de referência é um centro do campo de visão (320).
8. Dispositivo, de acordo com a reivindicação 5, caracterizado pelo fato de que a localização do objeto no campo de visão (320) é relativa a outro objeto da pluralidade de objetos.
9. Dispositivo, de acordo com a reivindicação 5, caracterizado pelo fato de que a primeira pontuação inclui um número diferente de qualquer número inteiro.
10. Dispositivo, de acordo com a reivindicação 1, caracterizado pelo fato de que o circuito de seleção é configurado para fazer com que o dispositivo calcule a primeira pontuação com base em um primeiro valor de ponderação atribuído a um objeto com base em um tipo de objeto do objeto.
11. Dispositivo, de acordo com a reivindicação 10, caracterizado pelo fato de que o tipo de objeto inclui um tipo de objeto de face humana.
12. Meio de armazenamento não transitório legível por computador caracterizado pelo fato de que compreende armazenado nele instruções que, quando executadas por uma ou mais unidades de processamento, fazem com que a uma ou mais unidades de processamento executem um método compreendendo: identificar respectivas distâncias para cada um de uma pluralidade de objetos em um campo de visão (320) de um sistema de lentes (110), a pluralidade de objetos incluindo um primeiro objeto e um segundo objeto; determinar um foco do sistema de lentes (110), incluindo: ajustar o sistema de lentes para ter uma primeira configuração focal e uma primeira abertura na qual o primeiro objeto está em uma primeira profundidade próxima de campo; determinar uma primeira contagem de quaisquer da pluralidade de objetos que está em foco, enquanto o primeiro objeto está na primeira profundidade próxima de campo, devido à primeira configuração focal e à primeira abertura, em que a primeira contagem representa um número de objetos em foco, enquanto o primeiro objeto está na primeira profundidade próxima de campo; ajustar o sistema de lentes para ter uma segunda configuração focal e a primeira abertura na qual o segundo objeto está em uma segunda profundidade próxima de campo; determinar uma segunda contagem de quaisquer da pluralidade de objetos que está em foco, enquanto o segundo objeto está na segunda profundidade próxima de campo, devido à segunda configuração focal e à primeira abertura, em que a segunda contagem representa um número de objetos em foco enquanto o segundo objeto está na segunda profundidade próxima de campo; comparar uma primeira pontuação com base na primeira contagem que resulta da primeira configuração focal e uma segunda pontuação com base na segunda contagem que resulta da segunda configuração focal, para identificar uma preferência entre a primeira configuração focal e a segunda configuração focal com base em qual configuração focal fornece um número maior de objetos em foco; e fornecer, com base na comparação da primeira pontuação com a segunda pontuação, um sinal (162) que indica a preferência entre a primeira configuração focal e a segunda configuração focal com base em qual configuração focal fornece um número maior de objetos em foco; ajustar o sistema de lentes (110) com base no sinal (162); e capturar uma imagem recebida com o sistema de lentes (110) após o sistema de lentes ter sido ajustado com base no sinal.
13. Meio de armazenamento não transitório legível por computador, de acordo com a reivindicação 12, caracterizado pelo fato de que o sinal (162) que indica a preferência entre a primeira configuração focal e a segunda configuração focal é gerado independentemente da realização de qualquer contagem de objetos em foco, enquanto toda a pluralidade de objetos é deslocada de uma profundidade de campo próxima para uma configuração focal presente.
14. Meio de armazenamento não transitório legível por computador, de acordo com a reivindicação 12, caracterizado pelo fato de que o método compreende ainda a determinação do um ou mais outros focos do sistema de lentes (110), cada um do um ou mais dos outros focos devido em parte a uma abertura respectiva diferente da primeira abertura.
15. Meio de armazenamento não transitório legível por computador, de acordo com a reivindicação 12, caracterizado pelo fato de que o sinal indica a preferência pela primeira configuração focal, e um objeto diferente do primeiro objeto, da pluralidade de objetos, é um objeto mais próximo do conjunto de lentes enquanto o sistema de lentes tem a primeira configuração focal.
16. Meio de armazenamento não transitório legível por computador, de acordo com a reivindicação 12, caracterizado pelo fato de que o método inclui ainda calcular a primeira pontuação com base em um primeiro valor de ponderação atribuído a um objeto com base em uma localização do objeto no campo de visão (320).
17. Meio de armazenamento não transitório legível por computador, de acordo com a reivindicação 16, caracterizado pelo fato de que a localização do objeto no campo de visão (320) é relativa a um ponto de referência ou a uma linha de referência do campo de visão.
18. Meio de armazenamento não transitório legível por computador, de acordo com a reivindicação 16, caracterizado pelo fato de que a localização do objeto no campo de visão (320) é relativa a outro objeto da pluralidade de objetos.
19. Método, caracterizado pelo fato de que compreende: identificar respectivas distâncias para cada um de uma pluralidade de objetos em um campo de visão (320) de um sistema de lentes (110), a pluralidade de objetos incluindo um primeiro objeto e um segundo objeto; determinar um foco do sistema de lentes (110), incluindo: ajustar o sistema de lentes para ter uma primeira configuração focal e uma primeira abertura na qual o primeiro objeto está em uma primeira profundidade próxima de campo; determinar uma primeira contagem de quaisquer da pluralidade de objetos que está em foco, enquanto o primeiro objeto está em uma primeira profundidade próxima de campo, devido à primeira configuração focal e à primeira abertura, em que a primeira contagem representa um número de objetos em foco, enquanto o primeiro objeto está na primeira profundidade próxima de campo; ajustar o sistema de lentes para ter uma segunda configuração focal e a primeira abertura na qual o segundo objeto está em uma segunda profundidade próxima de campo; determinar uma segunda contagem de quaisquer da pluralidade de objetos que está em foco, enquanto o segundo objeto está na segunda profundidade próxima de campo, devido à segunda configuração focal e à primeira abertura, em que a segunda contagem representa um número de objetos em foco, enquanto o segundo objeto está na segunda profundidade próxima de campo; comparar uma primeira pontuação com base na primeira contagem que resulta da primeira configuração focal e uma segunda pontuação com base na segunda contagem que resulta da segunda configuração focal, para identificar uma preferência entre a primeira configuração focal e a segunda configuração focal com base em qual configuração focal fornece um número maior de objetos em foco; e fornecer, com base na comparação entre a primeira pontuação e a segunda pontuação, um sinal (162) que indica a preferência entre a primeira configuração focal e a segunda configuração focal com base em qual configuração focal fornece um número maior de objetos em foco; ajustar o sistema de lentes (110) com base no sinal (162); e capturar uma imagem recebida com o sistema de lentes (110) após o sistema de lentes ter sido ajustado com base no sinal.
20. Método, de acordo com a reivindicação 19, caracterizado pelo fato de que o sinal (162) que indica a preferência entre a primeira configuração focal e a segunda configuração focal é gerado independentemente da realização de qualquer contagem de objetos em foco enquanto toda a pluralidade de objetos é deslocada de uma profundidade próxima de campo para uma configuração focal presente.
21. Método, de acordo com a reivindicação 19, caracterizado pelo fato de que o sinal indica a preferência pela primeira configuração focal, e um objeto diferente do primeiro objeto, da pluralidade de objetos, é um objeto mais próximo do conjunto de lentes enquanto o sistema de lentes tem a primeira configuração focal.
22. Método, de acordo com a reivindicação 19, caracterizado pelo fato de que inclui ainda calcular a primeira pontuação com base em um primeiro valor de ponderação atribuído a um objeto com base em uma localização do objeto no campo de visão (320).
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/352,503 US10027879B2 (en) | 2016-11-15 | 2016-11-15 | Device, system and method to provide an auto-focus capability based on object distance information |
| US15/352,503 | 2016-11-15 | ||
| PCT/US2017/043017 WO2018093423A1 (en) | 2016-11-15 | 2017-07-20 | Device, system and method to provide an auto-focus capability based on object distance information |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BR112019009917A2 BR112019009917A2 (pt) | 2020-01-14 |
| BR112019009917B1 true BR112019009917B1 (pt) | 2021-08-31 |
Family
ID=59700161
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112019009917-4A BR112019009917B1 (pt) | 2016-11-15 | 2017-07-20 | Dispositivo, meio de armazenamento e método para fornecer uma capacidade de foco automático com base em informações de distância de objetos |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US10027879B2 (pt) |
| JP (1) | JP6960455B2 (pt) |
| KR (1) | KR102138845B1 (pt) |
| CN (1) | CN108076268B (pt) |
| BR (1) | BR112019009917B1 (pt) |
| DE (2) | DE102017121395A1 (pt) |
| GB (1) | GB2555942B (pt) |
| WO (1) | WO2018093423A1 (pt) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108663803B (zh) * | 2017-03-30 | 2021-03-26 | 腾讯科技(深圳)有限公司 | 虚拟现实眼镜、镜筒调节方法及装置 |
| CN112291469A (zh) * | 2018-07-23 | 2021-01-29 | 深圳市真迈生物科技有限公司 | 成像方法、装置及系统 |
| CN118158524A (zh) * | 2018-07-23 | 2024-06-07 | 深圳市真迈生物科技有限公司 | 成像方法、装置及系统 |
| WO2020041734A1 (en) * | 2018-08-24 | 2020-02-27 | Bossa Nova Robotics Ip, Inc. | Shelf-viewing camera with multiple focus depths |
| US10554918B1 (en) * | 2018-12-06 | 2020-02-04 | Alibaba Group Holding Limited | High definition, large capture volume, camera array system |
| CN110225244B (zh) * | 2019-05-15 | 2021-02-09 | 华为技术有限公司 | 一种图像拍摄方法与电子设备 |
| CN112073601B (zh) * | 2019-06-11 | 2022-02-01 | 杭州海康微影传感科技有限公司 | 一种聚焦方法、装置、成像设备及计算机可读存储介质 |
| JP2023502792A (ja) * | 2019-11-25 | 2023-01-25 | ホロジック インコーポレイティド | デジタル撮像システム及び方法 |
| CN114667457A (zh) * | 2019-12-11 | 2022-06-24 | 三星电子株式会社 | 电子设备及其控制方法 |
| US20210326064A1 (en) * | 2020-04-15 | 2021-10-21 | Micron Technology, Inc. | Media type selection based on object distance |
| CN111521119B (zh) * | 2020-04-24 | 2021-07-23 | 北京科技大学 | 一种铸坯厚度自适应在线图像采集方法 |
| CN114079726B (zh) * | 2020-08-13 | 2023-05-02 | 华为技术有限公司 | 一种拍摄方法及设备 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3437145C2 (de) | 1984-10-10 | 1996-03-28 | Ricoh Kk | Automatische Scharfeinstellvorrichtung für photographische Kameras |
| GB2196134B (en) | 1986-09-30 | 1990-12-19 | Canon Kk | Camera having auto focus apparatus |
| JPH02254432A (ja) | 1989-03-29 | 1990-10-15 | Canon Inc | オートフオーカスカメラ |
| DE4104113C2 (de) | 1990-02-14 | 1996-05-23 | Asahi Optical Co Ltd | Kamera mit motorbetriebenem Zoomobjektiv |
| US5532782A (en) | 1994-02-17 | 1996-07-02 | Nikon Corporation | Camera having a depth priority operation mode |
| JPH085915A (ja) | 1994-06-15 | 1996-01-12 | Minolta Co Ltd | 固定焦点式ズームレンズ |
| US7099575B2 (en) * | 2002-07-08 | 2006-08-29 | Fuji Photo Film Co., Ltd. | Manual focus device and autofocus camera |
| JP4794963B2 (ja) * | 2005-06-28 | 2011-10-19 | キヤノン株式会社 | 撮像装置および撮像プログラム |
| CN101713904B (zh) * | 2005-12-06 | 2012-08-29 | 松下电器产业株式会社 | 数字相机、相机机身、相机系统及该数字相机的控制方法 |
| US7646977B2 (en) * | 2007-01-17 | 2010-01-12 | Gateway, Inc. | Depth of field bracketing |
| US20090015681A1 (en) | 2007-07-12 | 2009-01-15 | Sony Ericsson Mobile Communications Ab | Multipoint autofocus for adjusting depth of field |
| US20110002680A1 (en) * | 2009-07-02 | 2011-01-06 | Texas Instruments Incorporated | Method and apparatus for focusing an image of an imaging device |
| US8229172B2 (en) * | 2009-12-16 | 2012-07-24 | Sony Corporation | Algorithms for estimating precise and relative object distances in a scene |
| KR20110104748A (ko) * | 2010-03-17 | 2011-09-23 | 삼성테크윈 주식회사 | 디지털 촬영장치 및 그 제어방법 |
| JP5899629B2 (ja) * | 2011-03-01 | 2016-04-06 | 株式会社ニコン | 撮像装置 |
| US8655162B2 (en) | 2012-03-30 | 2014-02-18 | Hewlett-Packard Development Company, L.P. | Lens position based on focus scores of objects |
| US9065993B1 (en) | 2012-07-31 | 2015-06-23 | Google Inc. | Fixed focus camera with lateral sharpness transfer |
| JP2014235224A (ja) | 2013-05-31 | 2014-12-15 | 株式会社ニコン | 撮像装置および制御プログラム |
| US9477138B2 (en) * | 2013-06-10 | 2016-10-25 | Apple Inc. | Autofocus |
| JP6018029B2 (ja) * | 2013-09-26 | 2016-11-02 | 富士フイルム株式会社 | 撮像画像の主要顔画像決定装置ならびにその制御方法およびその制御プログラム |
| TWI522720B (zh) | 2013-10-29 | 2016-02-21 | Nat Univ Chung Cheng | Adjust the focus method |
| TWI518305B (zh) * | 2014-04-21 | 2016-01-21 | 齊發光電股份有限公司 | 影像擷取方法 |
| CN105827928A (zh) * | 2015-01-05 | 2016-08-03 | 中兴通讯股份有限公司 | 一种选择对焦区域的方法及装置 |
-
2016
- 2016-11-15 US US15/352,503 patent/US10027879B2/en active Active
-
2017
- 2017-07-20 WO PCT/US2017/043017 patent/WO2018093423A1/en active Application Filing
- 2017-07-20 KR KR1020197016909A patent/KR102138845B1/ko active IP Right Grant
- 2017-07-20 JP JP2019525784A patent/JP6960455B2/ja active Active
- 2017-07-20 BR BR112019009917-4A patent/BR112019009917B1/pt active IP Right Grant
- 2017-09-14 DE DE102017121395.3A patent/DE102017121395A1/de active Pending
- 2017-09-14 DE DE202017105587.6U patent/DE202017105587U1/de active Active
- 2017-09-20 GB GB1715163.0A patent/GB2555942B/en active Active
- 2017-09-29 CN CN201710907341.0A patent/CN108076268B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| GB2555942B (en) | 2020-01-15 |
| US20180139376A1 (en) | 2018-05-17 |
| KR20190085964A (ko) | 2019-07-19 |
| DE202017105587U1 (de) | 2018-03-19 |
| CN108076268B (zh) | 2020-04-10 |
| JP2020502559A (ja) | 2020-01-23 |
| CN108076268A (zh) | 2018-05-25 |
| KR102138845B1 (ko) | 2020-07-28 |
| BR112019009917A2 (pt) | 2020-01-14 |
| GB201715163D0 (en) | 2017-11-01 |
| GB2555942A (en) | 2018-05-16 |
| JP6960455B2 (ja) | 2021-11-05 |
| US10027879B2 (en) | 2018-07-17 |
| WO2018093423A1 (en) | 2018-05-24 |
| DE102017121395A1 (de) | 2018-05-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR112019009917B1 (pt) | Dispositivo, meio de armazenamento e método para fornecer uma capacidade de foco automático com base em informações de distância de objetos | |
| US11461930B2 (en) | Camera calibration plate, camera calibration method and device, and image acquisition system | |
| US11830216B2 (en) | Information processing apparatus, information processing method, and storage medium | |
| CN105659580B (zh) | 一种自动对焦方法、装置及电子设备 | |
| CN108401457A (zh) | 一种曝光的控制方法、装置以及无人机 | |
| US9990710B2 (en) | Apparatus and method for supporting computer aided diagnosis | |
| WO2021114916A1 (zh) | 风险检测方法、装置及设备 | |
| BR102012020775B1 (pt) | aparelho de captura de imagem, aparelho de processamento de imagem e método para processamento de imagem para geração de informação auxiliar para a imagem capturada | |
| JP5776323B2 (ja) | 角膜反射判定プログラム、角膜反射判定装置および角膜反射判定方法 | |
| TWI687689B (zh) | 球狀體之旋轉之測定裝置、測定方法以及非暫時性資訊記錄媒體 | |
| US9082000B2 (en) | Image processing device and image processing method | |
| JP2014057303A (ja) | 深度推定手順において改善されたシーン検出を利用するためのシステム及び方法 | |
| US10692225B2 (en) | System and method for detecting moving object in an image | |
| US20160350615A1 (en) | Image processing apparatus, image processing method, and storage medium storing program for executing image processing method | |
| US10121067B2 (en) | Image processing apparatus that determines processing target area of an image based on degree of saliency, image processing method, and storage medium | |
| JP2017049426A (ja) | 位相差推定装置、位相差推定方法及び位相差推定プログラム | |
| US8655162B2 (en) | Lens position based on focus scores of objects | |
| KR20190079503A (ko) | 얼굴 인식을 위한 얼굴 자세 등록 장치 및 방법 | |
| KR20220044156A (ko) | 골프공 오버헤드 검출방법, 시스템 및 저장매체 | |
| Tordoff | Active control of zoom for computer vision | |
| CN116439652A (zh) | 一种屈光度检测方法、装置、上位机及系统 | |
| CN105763805B (zh) | 控制方法、控制装置及电子装置 | |
| US8611599B2 (en) | Information processing apparatus, information processing method, and storage medium | |
| JP2009059165A (ja) | 輪郭検出装置、それを用いた視線検出装置、偽の輪郭データの除去をコンピュータに実行させるためのプログラム、視線方向の検出をコンピュータに実行させるためのプログラムおよびそのプログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| US20180137384A1 (en) | Method for detecting glint |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B15K | Others concerning applications: alteration of classification |
Free format text: A CLASSIFICACAO ANTERIOR ERA: H04N 5/232 Ipc: H04N 5/232 (2006.01), G02B 7/28 (2021.01), G03B 13 |
|
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 20/07/2017, OBSERVADAS AS CONDICOES LEGAIS. |