BR112016023035B1 - Óculos de compensação visual e método de refração subjetiva de um indivíduo portador desse óculos - Google Patents
Óculos de compensação visual e método de refração subjetiva de um indivíduo portador desse óculos Download PDFInfo
- Publication number
- BR112016023035B1 BR112016023035B1 BR112016023035-3A BR112016023035A BR112016023035B1 BR 112016023035 B1 BR112016023035 B1 BR 112016023035B1 BR 112016023035 A BR112016023035 A BR 112016023035A BR 112016023035 B1 BR112016023035 B1 BR 112016023035B1
- Authority
- BR
- Brazil
- Prior art keywords
- optical
- optical element
- power
- glasses
- axis
- Prior art date
Links
Images


Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/02—Subjective types, i.e. testing apparatus requiring the active assistance of the patient
- A61B3/028—Subjective types, i.e. testing apparatus requiring the active assistance of the patient for testing visual acuity; for determination of refraction, e.g. phoropters
- A61B3/04—Trial frames; Sets of lenses for use therewith
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/0016—Operational features thereof
- A61B3/0025—Operational features thereof characterised by electronic signal processing, e.g. eye models
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/0016—Operational features thereof
- A61B3/0033—Operational features thereof characterised by user input arrangements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/02—Subjective types, i.e. testing apparatus requiring the active assistance of the patient
- A61B3/028—Subjective types, i.e. testing apparatus requiring the active assistance of the patient for testing visual acuity; for determination of refraction, e.g. phoropters
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/02—Viewing or reading apparatus
- G02B27/022—Viewing apparatus
- G02B27/027—Viewing apparatus comprising magnifying means
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/023—Mountings, adjusting means, or light-tight connections, for optical elements for lenses permitting adjustment
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/12—Adjusting pupillary distance of binocular pairs
-
- G—PHYSICS
- G02—OPTICS
- G02C—SPECTACLES; SUNGLASSES OR GOGGLES INSOFAR AS THEY HAVE THE SAME FEATURES AS SPECTACLES; CONTACT LENSES
- G02C13/00—Assembling; Repairing; Cleaning
- G02C13/003—Measuring during assembly or fitting of spectacles
Abstract
ÓCULOS DE COMPENSAÇÃO VISUAL E MÉTODO DE REFRAÇÃO SUBJETIVA DE UM INDIVÍDUO PORTADOR DESSE ÓCULOS. A invenção refere-se a óculos de compensação visual compreendendo meios de suporte (130, 140, 152) em um rosto de um portador e pelo menos um subconjunto óptico (110, 120) montado nos meios de suporte (130, 140, 152) em frente de pelo menos um dos olhos do portador. O subconjunto óptico (110, 120) compreende três elementos ópticos montados nos meios de suporte em série seguindo um eixo óptico: um primeiro elemento óptico de potência cilíndrica para uma direção de olhar do portador seguindo o eixo óptico, um segundo elemento óptico de potência cilíndrica para a referida direção de olhar e um terceiro elemento óptico de potência esférica variável para a referida direção de olhar. O primeiro elemento óptico e o segundo elemento óptico são reguláveis em rotação em torno do eixo óptico independentemente um do outro.
Description
[0001] A presente invenção refere-se ao domínio da optometria.
[0002] Se refere mais particularmente a óculos de compensação visual, por exemplo, óculos de ensaio, assim como a um processo de refração subjetiva de um indivíduo portador desses óculos.
[0003] No quadro da medição da acuidade visual de um paciente, já foi proposto simular a compensação visual a ser fornecida, por exemplo, por meio de óculos de ensaio ou de um refrator, tal como uma cabeça de refração.
[0004] Na cabeça de refração, são colocadas lentes de ensaio em vários discos, acionados em rotação manualmente ou através de um mecanismo motorizado. Se compreende, todavia, que um tal objeto tem um volume e um peso significativos, ligados ao número de lentes colocadas em cada disco.
[0005] Os óculos de ensaios são menos volumosos. Se prevê com efeito que recebam sucessivamente lentes de ensaio com correções diferentes até encontrar a correção que convém ao paciente.
[0006] Essa solução é, no entanto, muito pouco prática, nomea damente porque necessita de armazenagem separada das lentes de ensaio em caixas dedicadas. Implica, além disso, mudanças de lentes que provocam transições de potência de correção não desejadas e não contínuas.
[0007] Nesse contexto, a presente invenção propõe óculos de compensação visual compreendendo meios de suporte em um rosto de um portador e pelo menos um subconjunto óptico montado sobre os meios de suporte em relação a pelo menos um dos olhos do portador, caracterizado pelo fato de o subconjunto óptico compreender três elementos ópticos montados sobre os meios de suporte em série seguindo um eixo óptico cujo primeiro elemento óptico de potência cilíndrica para uma direção de olhar do portador seguindo o eixo óptico, um segundo elemento óptico de potência cilíndrica para a referida direção de olhar e um terceiro elemento óptico de potência esférica variável para a referida direção de olhar, o primeiro elemento óptico e o segundo elemento óptico sendo reguláveis em rotação em torno do eixo óptico independentemente um do outro.
[0008] Se pode assim obter uma grande variedade de correções em óculos: com efeito, pela combinação proposta dos três elementos ópticos supracitados, se pode fazer variar a potência esférica, a potência cilíndrica e o ângulo de cilindro gerados pelo subconjunto óptico.
[0009] Na modalidade de realização descrita, o eixo óptico é per pendicular ao eixo de cilindro dos primeiro e segundo elementos ópticos e os primeiro e segundo elementos ópticos não exercem nenhuma potência esférica para a referida direção de olhar do portador.
[0010] Se prevê, por exemplo, que cada um dos primeiro, segundo e terceiro elementos ópticos seja uma lente de diâmetro superior ou igual a 20 mm, o que permite obter um subconjunto óptico com um tamanho suficiente para colocar um olho em observação.
[0011] O subconjunto óptico compreende, por exemplo, um cartão eletrônico projetado para controlar a potência esférica do terceiro elemento óptico, a posição do primeiro elemento óptico em torno do eixo óptico e a posição do segundo elemento óptico em rotação em torno do eixo óptico em função de informações de instrução.
[0012] Se pode prever por outro lado que o subconjunto óptico compreenda um inclinômetro e/ou um telêmetro; o cartão eletrônico pode então determinar as informações de instrução em função nomeadamente de uma informação de inclinação recebida do inclinômetro e/ou do telêmetro.
[0013] Se pode também considerar a utilização de um botão acio- nável pelo portador, de modo que o cartão eletrônico possa modificar a potência esférica do terceiro elemento óptico se pressionado o botão.
[0014] Se pode, além disso, prever um módulo de recepção projetado para receber as informações de instrução através de uma ligação sem fios. Se evita assim a presença de fios que iriam prejudicar o portador de óculos. Esse pode, portanto, ter uma postura natural quando usa os óculos de compensação visual.
[0015] Os meios de suporte compreendem, por exemplo, um suporte nasal. O subconjunto óptico pode por outro lado ser montado em um elemento de armação, eventualmente de modo regulável ao longo de um eixo horizontal.
[0016] O suporte nasal pode por sua vez ser montado regulável no elemento de armação.
[0017] Os meios de suporte podem, além disso, compreende pelo menos uma haste de comprimento regulável.
[0018] Os óculos podem também compreender um sistema de ar mazenagem de energia (por exemplo, elétrica) permitindo alimentar (eletricamente) meios projetados para regular a potência esférica do terceiro elemento óptico e/ou a posição do primeiro elemento óptico em torno do eixo óptico e/ou a posição do segundo elemento óptico em rotação em torno do eixo óptico, para tornar autônomo o aparelho.
[0019] A invenção propõe também um processo de refração subjetiva de um indivíduo portador dos óculos como propostos mais acima e compreendendo as etapas seguintes: - determinação de um tipo de visão (a visão de perto, visão intermediária ou visão de longe) por utilização de um inclinômetro ou de um telêmetro; - determinação, pelo cartão eletrônico, de pelo menos uma informação de instrução associada ao tipo de visão determinado; - ajustamento da potência óptica do terceiro elemento óptico, da posição do primeiro elemento óptico ou da posição do segundo elemento óptico em função da informação de instrução determinada. Para determinar o tipo de visão, se utiliza, por exemplo, a distância de mira (distância do objeto observado ao longo da linha de olhar) determinada graças ao inclinômetro ou graças ao telêmetro; gamas de valores da distância de mira estão associadas aos diferentes tipos de visão.
[0020] Um tal processo pode também compreender as etapas seguintes: - detecção de uma pressão no botão; - ajustamento da potência óptica em função dos dados recebidos do cartão de controle.
[0021] A descrição que se vai seguir em relação aos desenhos anexados, dados a título de exemplos não limitativos, fará compreender bem em que consiste a invenção e como pode ser realizada.
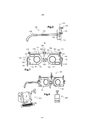
[0022] Nos desenhos anexados: - a figura 1 representa esquematicamente os elementos ópticos utilizados em um exemplo de implementação da invenção; - a figura 2 representa uma vista em corte de um exemplo de dispositivo de compensação visual que pode ser utilizado no quadro da invenção; - a figura 3 representa uma vista em corte do dispositivo de compensação visual da figura 2 do lado das lentes cilíndricas; - a figura 4 é uma vista em corte do dispositivo de compensação visual da figura 2 do lado da lente esférica variável; - a figura 5 representa esquematicamente um elemento de controle do dispositivo de compensação visual da figura 2; - a figura 6 representa em vista lateral um par de óculos de ensaio utilizando dois dispositivos de compensação visual do tipo do representado nas figuras de 2 a 4; - a figura 7 representa uma vista frontal do par de óculos de ensaio da figura 6; - a figura 8 mostra um exemplo convencional de utilização dos óculos de ensaio das figuras 6 e 7.
[0023] Na figura 1 são esquematicamente representados os ele mentos ópticos principais de um exemplo de dispositivo de compensação visual utilizado, como descrito mais tarde, em óculos de compensação visual de acordo com os ensinamentos da invenção.
[0024] Esses elementos ópticos compreendem uma lente plano-cilíndrica convexa 2, de potência cilíndrica C0, uma lente plano- cilíndrica côncava 4, de potência negativa -Co e uma lente 6 de potência esférica variável SV.
[0025] O valor absoluto (ou módulo), aqui C0, da potência cilíndrica (aqui -C0) da lente plano-cilíndrica côncava 4 é, portanto, igual ao valor absoluto (C0) (ou módulo) da potência cilíndrica (C0) da lente plano- cilíndrica convexa 2.
[0026] Se poderá prever em variante que as respectivas potências cilíndricas da lente plano-cilíndrica côncava 4 e da lente plano- cilíndrica convexa 2 sejam (ligeiramente) diferentes em valor absoluto, mas sejam em qualquer caso tais que a potência cilíndrica resultante, gerada pela combinação dessas duas lentes, tenha um valor insignificante (por exemplo inferior a 0,1 dioptria em valor absoluto) em pelo menos uma posição relativa dessas duas lentes.
[0027] As três lentes 2, 4, 6 são colocadas em um mesmo eixo óptico X. Precisamente, cada uma das três lentes 2, 4, 6 tem uma forma exterior geralmente cilíndrica, centrada no eixo óptico X. No exemplo descrito aqui, as lentes 2, 4, 6 têm respectivamente os diâmetros (medindo seu volume) seguintes: 25 mm, 25 mm, 20 mm.
[0028] Se nota assim que é preferível utilizar esse dispositivo de compensação visual 10 posicionando o olho do paciente do lado da lente de potência esférica variável 6 de modo que as lentes cilíndricas de potência 2, 4 com maior diâmetro, não venham limitar o campo de visão definido pela lente de potência esférica variável 6, que é ele próprio largo devido à proximidade do olho do paciente.
[0029] Cada uma das três lentes 2, 4, 6 compreende uma primeira face plana, perpendicular ao eixo óptico X, e uma segunda face, oposta à primeira face e oticamente ativa: - a face oticamente ativa da lente 2 é de forma cilíndrica convexa (o eixo Y1 do cilindro que define essa face sendo perpendicular ao eixo óptico X); - a face oticamente ativa da lente 4 é de forma cilíndrica côncava (o eixo Y2 do cilindro que define essa face sendo perpendicular ao eixo óptico X); - a face oticamente ativa da lente 6 de potência esférica variável SV é deformável e pode assim tomar uma forma esférica convexa (como ilustrado a pontilhado na figura 1), uma forma plana ou uma forma esférica côncava (como ilustrado em linhas cheias).
[0030] A lente 6 de potência esférica variável SV é por exemplo uma lente do tipo descrito no documento EP 2 034 338. Uma tal lente compreende uma cavidade fechada por uma membrana deformável transparente e uma parede plana transparente móvel; a cavidade contém um líquido transparente de volume constante que é mais ou menos forçado pela face móvel, para deformar a membrana que é assim uma superfície côncava esférica, ou uma superfície plana, ou uma superfície convexa esférica. Na lente utilizada, uma transformação de movimento realizada por um sistema de parafuso porca permite garan- tir a transformação de movimento de translação - rotação. No exemplo aqui descrito, a lente 6 tem uma focal variável entre -40 mm e 40 mm, ou seja, uma potência esférica SV variável entre -25D e 25D (D sendo a dioptria, unidade de medição da vergência, inversa da focal expressa em metros).
[0031] Por outro lado, as lentes plano-cilíndricas 2, 4 têm respectivamente como já indicado uma potência cilíndrica -C0 e C0, aqui com C0 = 5D.
[0032] Como explicado mais em detalhe a seguir, a lente plano-cilíndrica côncava 4 e a lente plano-cilíndrica convexa 2 são montadas em rotação em torno do eixo X (rotação centrada no eixo X).
[0033] O eixo Y1 do cilindro convexo formado na face oticamente ativada lente plano-cilíndrica convexa 2 pode assim formar um ângulo variável α1 com um eixo de referência Y0 (fixo e perpendicular ao eixo óptico X).
[0034] Do mesmo modo, o eixo Y2 do cilindro côncavo formado sobre a face oticamente ativa da lente plano-cilíndrica côncava 4 pode formar um ângulo variável α2 com o eixo de referência Y0.
[0035] Por cálculo da vergência nos diferentes meridianos, se obtêm as fórmulas seguintes para a potência esférica S, a potência cilíndrica C e o ângulo de astigmatismo α do subconjunto óptico formado por três elementos ópticos 2, 4, 6 que acaba de ser descrito:
[0036] Se nota que o termo (-C/2) na fórmula 3 corresponde a uma potência esférica gerada pela resultante das 2 lentes de potência cilíndrica.
[0037] Controlando a posição em rotação da lente plano-cilíndrica convexa 2 e a posição em rotação da lente plano-cilíndrica 4, indepen-dentemente uma da outra, como descrito mais adiante, se pode fazer variar independentemente cada um dos ângulos αi, α2 de 0° a 360° e assim obter uma potência cilíndrica C regulável entre -2.C0 e 2.C0 (ou seja, aqui entre -i0D e i0D), e em qualquer ângulo de astigmatismo regulável entre 0° e 360° obtida por um controle simultâneo das duas lentes. Como indica a fórmula número 3, a resultante de potência esférica induzida pela resultante da orientação das 2 lentes cilíndricas é compensada através da lente esférica de potência variável.
[0038] Por outro lado, fazendo variar a potência esférica SV da lente esférica 6, se pode regular a potência esférica S do subconjunto formado por três lentes 2, 4, 6.
[0039] De acordo com uma variante possível, as lentes de potência cilíndrica fixa poderiam ter a mesma potência cilíndrica C0 (positiva ou negativa): se poderia tratar de duas lentes plano-cilíndricas convexas, eventualmente idênticas, ou, em alternativa, de duas lentes plano- cilíndricas côncavas, eventualmente idênticas.
[0040] Com efeito, nesse caso, a potência esférica S, a potência cilíndrica C e o ângulo de astigmatismo α do subconjunto formado por essas duas lentes e por uma lente de potência esférica variável são dados pelas fórmulas seguintes:
[0041] O termo Co - C/2 corresponde à potência esférica induzida pela combinação das duas lentes de potência cilíndrica.
[0042] Também se pode, portanto, nesse caso regular a potência esférica S, a potência cilíndrica C e o ângulo de astigmatismo α, em particular de modo que a potência cilíndrica C seja nula, acionando em rotação as lentes de potência cilíndrica (independentemente uma da outra) e fazendo variar a potência esférica da lente de potência esférica variável.
[0043] Um exemplo de dispositivo de compensação visual 10 que utiliza os elementos ópticos que acabam de ser descritos está representado na figura 2.
[0044] Se irá utilizar por vezes na descrição que segue, para clarificar a explicação, termos como “superior” ou “inferior”, que definem uma orientação nas figuras 2, 3 e 4. Se compreende que essa orientação não é necessariamente aplicável na utilização que poderá ser feita a partir do dispositivo descrito, em particular a das figuras de 6 a 8.
[0045] O dispositivo de compensação visual 10 compreende uma caixa 12 formada por uma primeira parte 14, por uma segunda parte 16 e por uma terceira parte 18, que se estendem sucessivamente ao longo do eixo óptico X e são montadas duas a duas ao nível de planos perpendiculares ao eixo óptico X.
[0046] Uma primeira roda dentada 22 é montada em rotação cen trada no eixo óptico X na primeira parte 14 da caixa 12 e suporta no seu centro, em uma abertura prevista para esse fim, a lente plano- cilíndrica convexa 2. A primeira roda dentada 22 e a lente plano- cilíndrica 2 são coaxiais; em outras palavras, na secção em um plano perpendicular ao eixo óptico X, a circunferência exterior da primeira roda dentada 22 e a circunferência da lente plano-cilíndrica convexa 2 formam aros concêntricos centrados no eixo óptico X.
[0047] Do mesmo modo, uma segunda roda dentada 24 é montada em rotação centrada no eixo óptico X na segunda parte 16 da caixa 12 e suporta no seu centro, em uma abertura prevista para esse fim, a lente plano-cilíndrica côncava 4. A segunda roda dentada 24 e a lente plano-cilíndrica côncava 4 são coaxiais; em outras palavras, na secção em um plano perpendicular ao eixo óptico X, a circunferência exterior da segunda roda dentada 24 e a circunferência da lente plano-cilíndrica côncava 4 formam aros concêntricos centrados no eixo óptico X.
[0048] Uma terceira roda dentada 27 é montada em rotação centrada no eixo óptico X em uma terceira parte 18 da caixa 12. A terceira roda dentada 27 é fixada a um anel equipado na circunferência de uma caixa 26 que suporta a lente 6 de potência esférica variável e permitindo o controle da potência esférica SV. A caixa 26 da lente 6 de potência esférica variável é montada na terceira parte 18 da caixa 12.
[0049] Como bem visível na figura 3, a primeira roda dentada 22 é acionada em rotação (em torno do eixo óptico X) por meio de um primeiro motor 42 cujo eixo de acionamento suporta um primeiro parafuso sem fim 32 que engrena com a primeira roda dentada 22. O primeiro motor 42 é, por exemplo, montado na primeira parte 14 da caixa 12.
[0050] A posição corrente da primeira roda dentada 22 é vigiada por uma primeira célula óptica 52.
[0051] Do mesmo modo, a segunda roda dentada 24 é acionada em rotação em torno do eixo óptico X por meio de um segundo motor 44 cujo eixo de acionamento suporta um segundo parafuso sem fim 34 que engrena com a segunda roda dentada 24. O segundo motor 44 é por exemplo montado na segunda parte 16 da caixa 12.
[0052] A posição corrente da segunda roda dentada 24 é vigiada por uma segunda célula óptica 54.
[0053] Como representado na figura 4, a terceira roda dentada 27 é por sua vez acionada em rotação (em torno do eixo óptico X) por meio de um terceiro motor 46 que tem um eixo de acionamento em que é montado um terceiro parafuso sem fim 36 que engrena com a terceira roda dentada 27. O terceiro motor 46 é, por exemplo, montado na terceira parte 18 da caixa 12.
[0054] A posição corrente da terceira roda dentada 27 é vigiada por uma terceira célula óptica 56.
[0055] Os primeiro, segundo e terceiro motores 42, 44, 46 são, por exemplo, motores passo a passo, de uma resolução de 20 pas- sos/volta, pilotados aqui em 1/8 de passo (mais adiante micropassos). Em variante, esses motores poderiam ser pilotados em 1/16 de passo.
[0056] O volume interno da caixa 12 (como aliás o volume interno de cada uma das primeira, segunda e terceira partes 14, 16, 18 do mesmo modo) pode ser subdividido em um espaço de recepção dos motores 42, 44, 46 (zona superior da caixa 12 nas figuras 2, 3 e 4) e um espaço de recepção dos elementos ópticos 2, 4, 6 (zona inferior da caixa 12 nas figuras 2, 3 e 4).
[0057] O espaço de recepção dos motores 42, 44, 46 tem uma forma essencialmente paralelepipédica, aberta (para baixo nas figuras) na direção do espaço de recepção dos elementos ópticos 2, 4, 6 e fechado no oposto (para cima nas figuras) por uma face superior 19 da caixa 12 (a face superior 19 da caixa 12 sendo formada pela montagem de faces superiores respectivas das primeira, segunda e terceira partes 14, 16,18 da caixa 12).
[0058] A disposição dos motores 42, 44 e 46 é tal que permite beneficiar de uma geometria circular de 180° centrada no eixo óptico mais próximo do raio útil das lentes.
[0059] O espaço de recepção dos elementos ópticos 2, 4, 6 tem,ao contrário do espaço de recepção dos motores, uma forma cilíndrica (delimitada pelas paredes da caixa 12) que adapta a da terceira roda dentada 27 sobre a metade da circunferência dessa.
[0060] Em outras palavras, a caixa 12 (e consequentemente cada uma das primeira, segunda e terceira partes 14, 16, 18 da caixa 12) tem, ao nível do espaço de recepção dos elementos ópticos 2, 4, 6, uma forma cilíndrica de diâmetro (perpendicularmente ao eixo óptico X) da mesma ordem que, e ligeiramente superior ao da roda dentada 27.
[0061] Os respectivos diâmetros das rodas dentadas 22, 24, 27 estão adaptados para favorecer a conservação da área apesar da espessura do subconjunto óptico.
[0062] O primeiro motor 42 e o primeiro parafuso sem fim 32 se estendem na caixa 12 ao longo de uma direção Z perpendicular à face superior da caixa 12 (e, portanto, nomeadamente perpendicular ao eixo óptico X) de tal modo que o primeiro motor 42 é alojado no espaço de recepção dos motores enquanto o primeiro parafuso sem fim 32 se estende no espaço de recepção dos elementos ópticos.
[0063] O segundo motor 44 e o segundo parafuso sem fim 34 se estendem por sua vez na caixa 12 ao longo da mesma direção, mas ao contrário do primeiro motor 42 e do primeiro parafuso sem fim 34 em relação às lentes de potência cilíndrica 2, 4. O segundo motor 44 está alojado no espaço de recepção dos motores enquanto o segundo parafuso sem fim 34 se estende no espaço de recepção dos elementos ópticos.
[0064] Se nota que assim o primeiro parafuso sem fim 32 e o segundo parafuso sem fim 34 estão situados de ambos os lados do conjunto formado pela primeira roda dentada 22 e a segunda roda dentada 24, e que o volume lateral (ao longo de um eixo Y perpendicular aos eixos X e Z acima mencionados) dessas diferentes peças (primeiro parafuso sem fim 32, segundo parafuso sem fim 34, primeira ou segunda roda dentada 22, 24) é inferior ao diâmetro da terceira roda dentada 27 de modo que os primeiro e segundo parafusos sem fim 32, 34 contêm no espaço de recepção elementos ópticos sem necessitar de excrecência para os receber.
[0065] Por outro lado, os primeiro e segundo motores 42, 44 têm cada um o volume ao longo do eixo óptico X superior ao de cada uma das primeira e segunda rodas dentadas 22, 24, e mesmo superior ao de cada uma das primeira e segunda partes 14, 16 da caixa 12. No en- tanto, visto que esse primeiro e segundo motores 42, 44 estão colocados como acaba de ser indicado de cada lado da caixa 12 (em relação ao eixo Z), podem cada um ocupar um espaço que se estende ao longo do eixo óptico X para a direita da primeira parte 14 e para a segunda parte 16 da caixa 12.
[0066] Por exemplo, cada um dos primeiro e segundo motores 42,44 tem um volume lateral (diâmetro externo do motor) compreendido entre 6 e 12, por exemplo 10 mm, enquanto as primeira e segunda rodas dentadas 22, 24 têm cada uma espessura (volume ao longo do eixo X) compreendido entre 1 e 4, por exemplo 2,5 mm.
[0067] O terceiro motor 46 e o terceiro parafuso sem fim 36 estão pelo contrário situados no espaço de recepção dos motores, na zona que se estende ao longo do eixo X para a direita da terceira parte 18 da caixa 12. Assim, o terceiro parafuso sem fim 36 engrena na terceira roda dentada 27 em uma parte superior dessa, o que permite à caixa 12 adaptar a forma da caixa 12 na parte inferior da terceira roda dentada 27, como já indicado.
[0068] No exemplo descrito, como visível na figura 4, o eixo do terceiro motor 46 do terceiro parafuso sem fim 36 é ligeiramente inclinado em relação à face superior da caixa 12 (precisamente em relação ao eixo Y supracitado).
[0069] Se prevê, por exemplo, que a espessura da terceira roda dentada 27 está compreendida entre 0,3 mm e 2 mm.
[0070] Essa disposição dos diferentes elementos permite obter uma caixa relativamente fina, tipicamente com uma espessura compreendida entre 15 e 20 mm.
[0071] A caixa 12 compreende também, por exemplo na zona superior do espaço de recepção dos motores, um elemento de controle 50, formado aqui por vários circuitos integrados suportados por um circuito comum impresso.
[0072] Por outro lado, um dispositivo de armazenagem de energia elétrica de tipo bateria 58 (ou, em variante, uma supercapacidade) é previsto para tornar autônomo o aparelho. Se preveem, por exemplo, também elementos de recarga sem contato do dispositivo de armazenagem de energia 58. A bateria 58 permite nomeadamente a alimentação elétrica dos motores 42, 44, 46 e do elemento de controle 50.
[0073] A esse título, os elementos de comando e de controle serão selecionados preferencialmente pelo seu baixo consumo.
[0074] Os elementos principais de um tal elemento de controle 50, assim como sua conexão com os motores 42, 44, 46 e com as células ópticas 52, 54, 56 supracitados, são representados esquematicamente na figura 5.
[0075] O elemento de controle 50 compreende um módulo de recepção 60 projetado para receber, aqui através de uma ligação sem fios, as informações de instrução, isto é, informações indicativas dos valores desejados pelo usuário para a potência esférica S, a potência cilíndrica C e o ângulo de astigmatismo α que definem a compensação gerada pelo subconjunto óptico formado por elementos ópticos 2, 4, 6.
[0076] O módulo de recepção 60 é, por exemplo, um módulo de recepção infravermelho que recebe essas informações de instrução de um controle remoto com emissão infravermelha manipulada pelo usuário. Em variante, se poderia prever que essas informações de instrução sejam recebidas de um computador através de uma ligação sem fios, por exemplo uma rede local sem fios; o usuário poderia nesse caso escolher valores de potência esférica S, de potência cilíndrica C e de ângulo de astigmatismo α para o dispositivo de compensação visual por seleção interativa no computador.
[0077] O módulo de recepção 60 transmite as informações de instrução S, C, α recebidas para um computador 66 (constituído por exemplo por um processador executando um programa de computador para implementar as funções do computador descritas mais adiante), precisamente a um módulo de cálculo 68 implementado por esse computador 66.
[0078] O módulo de cálculo 68 determina os valores dos ângulos α1, α2 e o valor de potência esférica SV necessários para obter os valores de instrução S, C, α recebidos na entrada, na base das fórmulas acima expostas. Se as lentes plano-cilíndricas 2 e 4 têm respectivamente uma potência cilíndrica -CO e CO, se utilizam por exemplo as fórmulas seguintes:
[0079] O computador 66 implementa também um módulo de controle 70 que recebe na entrada os valores de ângulo α1, α2 e de potência esférica SV determinados pelo módulo de cálculo 68 e emite sinais de controle para motores 42, 44, 46 a fim de controlar cada um dos motores 42, 44, 46 independentemente dos outros de modo a obter posicionamentos respectivos das rodas dentadas 22, 24, 27 que permitem obter os valores desejados: - o módulo de controle 7o controla o primeiro motor 42 para fazer girar a primeira roda dentada 22 em torno do eixo óptico X até à posição onde o eixo Y1 da superfície cilíndrica oticamente ativa da lente plano-cilíndrica convexa 2 (suportada pela primeira roda dentada 22) forma um ângulo α1 com a direção de referência Yo; - o módulo de controle 7o controla o segundo motor 44 para fazer girar a segunda roda dentada 24 em torno do eixo óptico X até à posição onde o eixo Y2 da superfície cilíndrica oticamente ativa da lente plano-cilíndrica côncava 4 (suportada pela segunda roda dentada 24) forma um ângulo α2 com a direção de referência Y0; - o módulo de controle 70 controla o terceiro motor 46 para fazer girar a terceira roda dentada 27 em torno do eixo óptico X até à posição onde o anel de controle da potência esférica variável controla a potência esférica SV determinada pelo módulo de cálculo 68.
[0080] A posição de cada roda dentada 22, 24, 27 é conhecida a cada momento respectivamente graças às células ópticas 52, 54, 56 que medem cada uma, na roda dentada a que cada uma está associada, o número de dentes que atravessam a célula óptica em relação a um ponto de referência na circunferência da roda referida (por exemplo, desprovida de dente).
[0081 No exemplo descrito aqui, o conjunto do primeiro motor 42 -primeiro parafuso sem fim 32 - primeira roda dentada 22, como o conjunto do segundo motor 44 - segundo parafuso sem fim 34 - segunda roda dentada 24, gera uma desmultiplicação tal que uma volta de roda dentada 22, 24 corresponde a 15040 micropassos do motor associado 42, 44. A resolução (ângulo de rotação das rodas dentadas 22, 24 para um mi- cropasso) é, portanto, de 0,024° para os ângulos αi, α2.
[0082] O conjunto do terceiro motor 46 - terceiro parafuso sem fim 36 - terceira roda dentada 46 gera por sua vez uma desmultiplicação de 16640 micropassos por volta. O anel de controle da potência esférica variável é regulável em um gama angular de 120° (o que corresponde, portanto a 5547 micropassos) para obter a variação de potência esférica de -25D até 25D (ou seja, uma gama de variação de 50D). A resolução (variação de potência esférica SV para um micropasso) é, portanto, de 0,009D.
[0083] Se pode prever que, no momento da passagem de valores de instrução iniciais α1, α2, SV para novos valores de instrução α’1, α’2, S’V, cada um do primeiro, do segundo e do terceiro motores 42, 44, 46 sejam acionados durante um mesmo período T (em segundos), que pode depender eventualmente da amplitude de uma das mudanças de instrução (por exemplo da variação, em valor absoluto, de potência esférica |S’v - SV |, onde | x| é o valor absoluto de x).
[0084] Para isso, o computador 66 determina, por exemplo, o número p1 de micropassos do motor 42 permitindo a passagem do ângulo α1 para o ângulo α’1, o número p2 de micropassos do motor 44 permitindo a passagem do ângulo α2 para o ângulo α’2 e o número p3 de micropassos do motor 46 permitindo a passagem da potência esférica SV para a potência esférica S’V. O computador 66 comanda então a rotação do motor 42 a uma velocidade de p1/T micropassos por segundo, a rotação do motor 44 a uma velocidade de p2/T micropassos por segundo e a rotação do motor 46 a uma velocidade de p3/T micropas- sos por segundo.
[0085] O elemento de controle 50 compreende também um sensor de temperatura 62, que fornece uma informação de temperatura ambiente medida, e um inclinômetro 64, por exemplo, realizado na forma de um acelerômetro e que fornece uma informação de orientação do dispositivo de compensação visual 10, por exemplo, em relação à vertical. Na aplicação descrita mais adiante com referência às figuras de 6 a 8, a informação de orientação pode ser utilizada para determinar a posição do dispositivo de compensação visual, e, por conseguinte, que olho é corrigido por esse dispositivo de compensação visual, e/ou a inclinação do dispositivo de compensação visual em relação à vertical a fim de determinar se o usuário olha na visão de longe, na visão intermediária ou na visão de perto.
[0086] O computador 66 recebe a informação de temperatura a partir do sensor de temperatura 62 e a informação de orientação a partir do inclinômetro 64 e utiliza pelo menos uma dessas informações no quadro da determinação dos comandos a serem enviados para os motores 42, 44, 46.
[0087] No exemplo descrito, o módulo de controle 70 utiliza a informação de temperatura para compensar as variações de potência esférica da lente 6 devido à temperatura (que são da ordem de 0,06D/°C no exemplo descrito) e a informação de orientação para compensar as perturbações eventuais do sistema de acionamento (motores, parafusos sem fim, rodas dentadas) devidas a mudanças de orientação do dispositivo de compensação visual 10.
[0088] Ao contrário do caso da descrição das figuras de 2 a 4 mais acima, a descrição que se segue das figuras 6 e 7 faz referência a direções (horizontal e vertical especialmente) e a posicionamentos relativos (“inferior” ou “superior”) que correspondem à utilização dos óculos de compensação visual (aqui óculos de ensaio) para a medição de acuidade visual do portador.
[0089] As figuras 6 e 7 representam, respectivamente em vista lateral e em vista frontal, um par de óculos de ensaio utilizando dois dispositivos de compensação visual 110, 120 do tipo que acaba de ser descrito com referência às figuras de 1 a 5.
[0090] Os dois dispositivos de compensação visual 110, 120 são aqui idênticos, mas montados sobre meios de suporte no rosto de um portador, como explicado mais em detalhe abaixo, de modo a serem dispostos de modo simétrico em relação a um plano vertical médio M que corresponde ao plano sagital do portador.
[0091] Precisamente, o dispositivo de compensação visual 110 pa ra o olho direito do portador é disposto de tal modo que seu espaço (aqui paralelepipédico) de recepção dos motores 112 está localizado lateralmente e para o exterior (isto é, à direita visto do portador) do seu espaço (aqui cilíndrico) de recepção dos elementos ópticos 114 (isto é, do ocular 111 do dispositivo de compensação visual 110).
[0092] Em outras palavras, o eixo Z1 do dispositivo de compensação visual 110 (que corresponde ao eixo Z das figuras de 2 a 4 para o dispositivo de compensação visual 110) é perpendicular ao plano médio M (plano sagital do portador) e o espaço de recepção dos elementos ópticos 114 (ou o ocular 111) está localizado entre o espaço de recepção dos motores 112 e o plano médio M.
[0093] Do mesmo modo, o dispositivo de compensação visual 120 para o olho direito do portador é disposto de tal modo que seu espaço (aqui paralelepipédico) de recepção dos motores 122 está localizado lateralmente e para o exterior (isto é, à esquerda visto do portador) de seu espaço (aqui cilíndrico) de recepção dos elementos ópticos 124 (isto é, do ocular 121 do dispositivo de compensação visual 120).
[0094] Em outras palavras, o eixo Z2 do dispositivo de compensação visual 120 (que corresponde ao eixo Z das figuras de 2 a 4 para o dispositivo de compensação 120) é perpendicular ao plano médio M (plano sagital do portador) e o espaço de recepção dos elementos ópticos 124 (ou o ocular 121) está localizado entre o espaço de recepção dos motores 122 e o plano médio M.
[0095] O par de óculos de ensaio 100 compreende duas hastes 130, 140 montadas respectivamente no dispositivo de compensação visual 110 e no dispositivo de compensação visual 120, de cada vez em uma face de extremidade lateral do dispositivo de compensação visual 110, 120 referido e por meio de uma argola de fixação lateral 132, 142.
[0096] Cada haste 130, 140 compreende uma parte codificada (de posicionamento da orelha do portador) na sua extremidade oposta ao dispositivo de compensação visual 110, 120 referido. Cada haste 130, 140 é, além disso, regulável em comprimento por meio de um sistema de regulação adaptado 131 (por exemplo uma possibilidade de deslizamento entre duas semi-hastes que formam a haste 130, 140 referida) para poder ajustar a distância entre os olhos do paciente e os dispositivos de compensação visual 110, 120.
[0097] Cada haste 130, 140 é montada sobre a argola de fixação lateral correspondente 132, 142 com uma possibilidade de regulação em rotação em torno de um eixo horizontal (paralelo ao eixo Z1, Z2 definido mais acima), por exemplo, por meio de uma recartilha 133, 143 para poder ajustar o ângulo pantoscópico.
[0098] Como já indicado, a argola de fixação lateral 132, 142 é fixada na parede de extremidade lateral (referência 19 nas figuras 3 e 4) do dispositivo de compensação visual referido 110, 120 (isto é para a argola de fixação lateral 132, à direita do dispositivo de compensação visual 110 para o olho direito do portador e, para a argola de fixação lateral 142, à esquerda do dispositivo de compensação visual 120 para o olho esquerdo do portador). De cada lado, o espaço de recepção dos motores 112, 122 está, portanto, localizado entre a argola de fixação lateral 132, 142 e o espaço de recepção dos elementos ópticos 114, 124 (ou o ocular 111, 121).
[0099] Os dispositivos de compensação visual 110, 120 são os dois montados em uma peça transversal 150 formando elemento de armação, de ambos os lados do plano médio M, respectivamente por meio de uma primeira corrediça 136 e de uma segunda corrediça 146.
[0100] A posição de cada uma da primeira e segunda corrediças 136, 146 é regulável em translação ao longo da direção de extensão da peça transversal 150 (por exemplo, por meio de uma recartilha 137, 147 prevista para esse fim), o que permite uma regulação ao longo de uma direção horizontal perpendicular ao plano médio M (isto é, ao plano sagital do portador) da posição de cada dispositivo de compensação visual 110, 120. Se podem assim adaptar (independentemente uma da outra) as respectivas posições dos dispositivos de compensação visual 110, 120 para as meias-distâncias pupilares do lado direito e do lado esquerdo do portador.
[0101] Um suporte nasal 152 (projetado para se apoiar na parte superior do nariz do portador) é montado na peça transversal 150, no meio desse (isto é ao nível do plano médio M), por intermédio de uma argola de fixação 154 equipada com uma abertura oblonga que recebe um pino solidário da peça transversal 150 para permitir uma regulação ao longo de uma direção vertical da posição relativa do suporte nasal 152 e da peça transversal 150. Essa regulação é efetuada, por exemplo, por meio de uma recartilha 156 prevista para esse fim.
[0102] Se pode prever, além disso, uma possibilidade de rotação da argola de fixação central 154 em torno do eixo horizontal de extensão da peça transversal 150 para regular a posição do suporte nasal 152 em profundidade (isto é ao longo do eixo óptico dos dispositivos de compensação visual 110, 120).
[0103] Se descreve presentemente com referência à figura 8 um exemplo convencional de utilização dos óculos de ensaio 100 que acabam de ser descritos.
[0104] Os óculos de ensaio 100 são colocados no rosto do paciente, ajustando as diferentes regulagens descritas mais acima à morfologia do paciente, dentro das boas práticas.
[0105] Pode então começar o exame visual.
[0106] O praticante envia instruções (informações indicativas dos valores desejados pelo usuário para a potência esférica S, a potência cilíndrica C e o ângulo de astigmatismo α) para o olho direito e para o olho esquerdo por meio da ligação sem fios mencionada mais acima.
[0107] Para isso utiliza, por exemplo, como já indicado um controle remoto infravermelho 200 projetado para enviar dados representativos das instruções aos elementos de controle 50 através dos módulos de recepção 60 implantados respectivamente no dispositivo de compensação visual 110 e no dispositivo de compensação visual 120. Como já indicado, o praticante poderia utilizar em variante um computador 300, projetado, por exemplo, para estabelecer uma rede local sem fios (ou “Wireless Local Area Network”) com os módulos de recepção 60 (que são nessa variante módulos de recepção de rádio).
[0108] Se pode também prever que os dados representativos das instruções sejam emitidos por um aparelho eletrônico que efetuou uma medição de ametropia do paciente. Os óculos de ensaio 100 serão utilizados nesse caso para validar a refração resultante das medições de ametropia.
[0109] Se propõe, por exemplo, com já indicado que o dispositivo eletrônico do praticante (controle remoto, computador ou aparelho de medição de ametropia nos exemplos que acabam de ser evocados) emitem dados representativos das instruções para os dois olhos e que o elemento de controle 50 integrado em cada dispositivo de compensação visual 110, 120 determina que instruções lhe estão destinadas.
[0110] Para isso, se prevê aqui que o elemento de controle 50 determine, na base das informações de orientação recebidas do acele- rômetro 64, qual é a orientação do dispositivo de compensação visual 110, 120 referido e, por conseguinte, a que olho esse dispositivo de compensação visual 110, 120 está associado. Com efeito, no exemplo descrito, os dispositivos de compensação visual 110, 120 são idênticos e são montados de modo simétrico em relação ao plano médio M, como já indicado.
[0111] Em variante, se poderia prever que o elemento de controle 50 armazene um item de informação indicativa da posição (à direita ou à esquerda) do dispositivo de compensação visual 110, 120 referido no par de óculos de ensaio 100.
[0112] Se pode prever, além disso, que, para cada olho e para cada parâmetro (potência esférica S, potência cilíndrica C e ângulo de astigmatismo α), vários valores de instrução sejam transmitidos ao dispositivo de compensação visual 110, 120 referido, os diferentes valores estando associados a diferentes ângulos de inclinação do dispo- sitivo referido em relação à vertical, ou a diferentes gamas angulares de inclinação do dispositivo referido em relação à vertical, ou ainda a diferentes tipos de visão (a visão de longe, visão intermediária, visão de perto).
[0113] Para um dispositivo de compensação visual, se entende por inclinação em relação à vertical (no quadro dos óculos de compensação visual como os das figuras 6 e 7) o ângulo formado pelo eixo Y das figuras 3 e 4 com a vertical, que corresponde à inclinação em relação à horizontal do eixo óptico X do dispositivo de compensação visual.
[0114] Quando o portador mantém a cabeça direita e olha ao longe (visão de longe) esse ângulo é nulo ou baixo (inferior a 10°); pelo contrário, na visão de perto, esse ângulo é convencionalmente de 30°.
[0115] Quando um dispositivo de compensação visual 110, 120 (e precisamente seu elemento de controle 50) recebe diferentes valores de instrução (associados a diferentes valores de inclinação) para um parâmetro, determina por meio das informações de orientação recebidas do acelerômetro 64 a inclinação corrente em relação à vertical e controla os elementos ópticos (como explicado mais acima com referência à figura 5) utilizando os valores dos parâmetros associados à inclinação assim determinada.
[0116] Referindo-se à visão intermediária, se pode prever que o dispositivo eletrônico do paciente (controle remoto, computador) emite valores específicos dos diferentes parâmetros para uma gama de inclinação compreendendo a inclinação de 20° (convencionalmente associada à visão intermediária), por exemplo, a gama de valores compreendidos entre 15° e 25°. Em variante, o elemento de controle 50 poderia calcular valores dos diferentes parâmetros para a visão intermediária a partir de valores correspondentes recebidos para a visão de longe e para a visão de perto, e aplicar esses valores calculados quando determina, na base das informações de orientação recebidas do acele- rômetro 64, que a inclinação corrente está compreendida na gama acima mencionada.
[0117] De acordo com uma possibilidade de realização, se pode prever, por exemplo, em cada dispositivo de compensação visual 110, 120, um telêmetro projetado para medir a distância do objeto observado na direção de olhar (por exemplo por meio de um sistema de ultrassons ou por triangulação). O elemento de controle 50 pode então adaptar a potência esférica em função da distância do objeto observado, por exemplo aumentando a potência esférica quando o objeto está perto para compensar uma falha de adaptação visual.
[0118] O produto é um equipamento óptico, sem fragilidade particular, mas dada sua portabilidade, se pode prever uma base para garantir a recarga sem contato dos dois dispositivos de compensação visual 110, 120 e/ou verificar sua calibração utilizando um instrumento de tipo frontofocômetro, para garantir o nível do resultado pretendido.
[0119] Se compreende da descrição que precede que os óculos de ensaio descritos acima poderão ser utilizados para fins de refração subjetiva, quer seja na visão de longe, na visão intermediária ou na visão de perto.
[0120] Esses óculos de ensaio têm em relação aos óculos de ensaio tradicionais o benefício de uma reatividade muito grande, de não ter que retirar os óculos da cabeça do portador para modificar a correção, e de oferecer um valor de correção evolutiva em função da inclinação da cabeça.
[0121] Se pode também prever a utilização de tais óculos em condições de campo de visão dominadas, a partir de uma tela tendo estímulos móveis; os acelerômetros equipando os dispositivos de compensação visual vão então permitir gravar os movimentos da cabeça do paciente necessários ao acompanhamento do alvo.
[0122] Se poderá, portanto, por subtração dos movimentos da ca- beça em relação ao movimento teórico que deveria ter provocado o alvo deduzir o movimento intrínseco dos olhos.
[0123] Para realizar uma refração monocular, um dispositivo de ocultação não representado poderá ser colocado na janela óptica de um dos oculares 111, 121. Em alternativa, a automatização do dispositivo permitirá realizar esta separação direita/esquerda permitindo a re- fração monocular por meio de uma interferência no olho a ser ocultado por adição de uma potência óptica predeterminada (por exemplo de um valor de uma dioptria aproximadamente).
[0124] De acordo com uma outra utilização possível, os óculos de compensação visual propostos mais acima poderão ser utilizados como montagem teste permitindo por exemplo reproduzir a futura correção nas condições de utilizações reais, por exemplo para uma demonstração de utilização de lentes progressivas a meia distância.
[0125] Nesse contexto, se pode prever, além disso, um botão suplementar em uma face exterior dos dispositivos de compensação visual 110, 120 que permite, quando é introduzido, uma modificação predeterminada do valor de um parâmetro de correção (potência esférica S, potência cilíndrica C ou ângulo de astigmatismo α).
[0126] O portador dos óculos de ensaio pode assim obter (por exemplo, por meio de várias pressões no botão) uma regulação que melhor lhe convém.
Claims (17)
1. Óculos de compensação visual compreendendo meios de suporte (130, 140, 152) em um rosto de um portador e pelo menos um subconjunto óptico (110, 120) montado nos meios de suporte (130, 140, 152) em frente a pelo menos um dos olhos do portador, caracterizado pelo fato de o subconjunto óptico (110, 120) compreender três elementos ópticos montados nos meios de suporte em série seguindo um eixo óptico (X), incluindo um primeiro elemento óptico (2) de potência cilíndrica para uma direção de olhar do portador seguindo o eixo óptico (X), um segundo elemento óptico (4) de potência cilíndrica para a referida direção de olhar e um terceiro elemento óptico (6) de potência esférica variável para a referida direção de olhar, o primeiro elemento óptico (2) e o segundo elemento óptico (4) sendo reguláveis em rotação em torno do eixo óptico (X) independentemente um do outro, sendo que o subconjunto óptico (110, 120) compreende uma roda dentada (27) em rotação ao redor do eixo óptico (X) por meio de um motor (46) e presa a um anel permitindo controle da referida potência esférica variável.
2. Óculos de acordo com a reivindicação 1, caracterizado pelo fato de que o eixo óptico (X) é perpendicular ao eixo de cilindro do primeiro e do segundo elementos ópticos.
3. Óculos de acordo com qualquer uma das reivindicações 1 ou 2, caracterizado pelo fato de que o primeiro e o segundo elementos ópticos não exercem nenhuma potência esférica para a referida direção de olhar do portador.
4. Óculos de acordo com qualquer uma das reivindicações 1 a 3, caracterizado pelo fato de que cada um dos primeiro, segundo e terceiro elementos ópticos (2, 4, 6) é uma lente com diâmetro superior ou igual a 20 mm.
5. Óculos de acordo com qualquer uma das reivindicações 1 a 4, caracterizado pelo fato de que o subconjunto óptico (110, 120) compreende um cartão eletrônico (50) projetado para controlar a potência esférica do terceiro elemento óptico (6), a posição do primeiro elemento óptico (2) em torno do eixo óptico (X) e a posição do segundo elemento óptico (4) em rotação em torno do eixo óptico (X) em função de informações de instrução.
6. Óculos de acordo com a reivindicação 5, caracterizado pelo fato de que o subconjunto óptico compreende um clinômetro (64) e em que o cartão eletrônico (50) é projetado para determinar as informações de instrução em função de um item de informação de inclinação recebido do clinômetro (64).
7. Óculos de acordo com a reivindicação 5, caracterizado pelo fato de que o subconjunto óptico compreende um telêmetro e em que o cartão eletrônico (50) é projetado para determinar as informações de instrução em função de um item de informação remota recebido do telêmetro.
8. Óculos de acordo com qualquer uma das reivindicações 5 a 7, caracterizado pelo fato de compreender um botão acionável pelo portador, em que o cartão eletrônico é projetado para modificar a potência esférica do terceiro elemento óptico se o botão for pressionado.
9. Óculos de acordo com a reivindicação 5, caracterizado pelo fato de compreender um módulo de recepção projetado para receber as informações de instrução através de uma ligação sem fios.
10. Óculos de acordo com qualquer uma das reivindicações 1 a 9, caracterizado pelo fato de que os meios de suporte compreendem um suporte nasal (152).
11. Óculos de acordo com qualquer uma das reivindicações 1 a 10, caracterizado pelo fato de que o subconjunto óptico (110, 120) é montado em um elemento de armação (150).
12. Óculos de acordo com a reivindicação 11, caracterizado pelo fato de que o subconjunto óptico (110, 120) é montado regulável ao longo de um eixo horizontal no elemento de armação (150).
13. Óculos de acordo com qualquer uma das reivindicações 11 ou 12, a reivindicação 11 sendo tomada na dependência da reivindicação 10, caracterizado pelo fato de que o suporte nasal (152) é montado regulável no elemento de armação (150).
14. Óculos de acordo com qualquer uma das reivindicações 1 a 13, caracterizado pelo fato deque os meios de suporte compreendem uma haste (130, 140) de comprimento regulável.
15. Óculos de acordo com qualquer uma das reivindicações 1 a 14, caracterizado pelo fato de dispor de um sistema de armazenagem de energia permitindo alimentar meios projetados para regular a potência esférica do terceiro elemento óptico (6), a posição do primeiro elemento óptico (2) em torno do eixo óptico (X) e a posição do segundo elemento óptico (4) em rotação em torno do eixo óptico (X).
16. Método de refração subjetiva de um indivíduo portador do óculos como definido qualquer uma das reivindicações 6 ou 7, caracterizado pelo fato de compreender as etapas seguintes: - determinação de um tipo de visão por utilização do clinô- metro ou do telêmetro; - determinação pelo cartão eletrônico (50), de pelo menos um item de informação de instrução associada ao tipo de visão determinado; - ajuste da potência óptica do terceiro elemento óptico (6), da posição do primeiro elemento óptico (2) ou da posição do segundo elemento óptico (4) em função do item de informação de instrução determinado.
17. Método de refração subjetiva de um indivíduo portador do óculos como definido na reivindicação 8, caracterizado pelo fato de compreender as etapas seguintes: - detecção da pressão do botão; - ajuste da potência óptica em função dos dados recebidos do cartão de controle.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1453130A FR3019459B1 (fr) | 2014-04-08 | 2014-04-08 | Lunettes de compensation visuelle et procede de refraction subjective d'un individu portant ces lunettes |
| FR1453130 | 2014-04-08 | ||
| PCT/FR2015/050890 WO2015155456A1 (fr) | 2014-04-08 | 2015-04-07 | Lunettes de compensation visuelle et procede de refraction subjective d'un individu portant ces lunettes |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| BR112016023035A2 BR112016023035A2 (pt) | 2017-08-15 |
| BR112016023035A8 BR112016023035A8 (pt) | 2018-08-14 |
| BR112016023035B1 true BR112016023035B1 (pt) | 2022-09-13 |
Family
ID=51726592
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112016023035-3A BR112016023035B1 (pt) | 2014-04-08 | 2015-04-07 | Óculos de compensação visual e método de refração subjetiva de um indivíduo portador desse óculos |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US10278573B2 (pt) |
| EP (1) | EP3128895B1 (pt) |
| JP (1) | JP6588464B2 (pt) |
| KR (1) | KR102388278B1 (pt) |
| CN (2) | CN104970764B (pt) |
| BR (1) | BR112016023035B1 (pt) |
| CA (1) | CA2946643C (pt) |
| FR (1) | FR3019459B1 (pt) |
| WO (1) | WO2015155456A1 (pt) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3019459B1 (fr) * | 2014-04-08 | 2016-04-22 | Essilor Int | Lunettes de compensation visuelle et procede de refraction subjective d'un individu portant ces lunettes |
| FR3038823B1 (fr) * | 2015-07-17 | 2022-03-04 | Essilor Int | Dispositif de compensation visuelle, procede de commande d'un dispositif de compensation visuelle et dispositif binoculaire d'optometrie |
| CN105496351B (zh) * | 2015-12-30 | 2017-11-14 | 深圳市莫廷影像技术有限公司 | 一种双目验光装置 |
| EP3257434A1 (en) * | 2016-06-17 | 2017-12-20 | ESSILOR INTERNATIONAL (Compagnie Générale d'Optique) | Subjective refraction apparatus |
| KR101673466B1 (ko) * | 2016-08-24 | 2016-11-07 | 김용만 | 검안기의 동공 간 거리 조절장치 |
| ES2862141T3 (es) | 2016-09-22 | 2021-10-07 | Essilor Int | Dispositivo de optometría y procedimiento para realizar una prueba utilizando tal dispositivo de optometría |
| EP3309603B1 (en) | 2016-10-11 | 2019-01-02 | Essilor International | Method for determining a parameter of an optical equipment |
| CN106491070B (zh) * | 2016-11-02 | 2018-04-06 | 肖吉业 | 眼科用自主调节视力检查装置 |
| FR3059538B1 (fr) | 2016-12-07 | 2023-10-27 | Essilor Int | Procede de mesure de la refraction, procede de conception optique d'une lentille ophtalmique, lentille ophtalmique, procede d'aide a la selection d'une monture et paire de lunettes |
| JP7145708B2 (ja) * | 2018-09-20 | 2022-10-03 | 株式会社トプコン | 検眼装置 |
| CN109480764A (zh) * | 2018-09-27 | 2019-03-19 | 深圳市莫廷影像技术有限公司 | 手持验光仪及验光方法 |
| AU2020202945B1 (en) * | 2020-05-04 | 2020-08-20 | OES Limited | Optical Trial Frame |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3880502A (en) * | 1972-06-15 | 1975-04-29 | Humphrey Instruments Inc | Ophthalmological apparatus and process having independent astigmatic and spherical inputs |
| CA1126555A (en) * | 1978-03-30 | 1982-06-29 | Donald B. Whitney | Ophthalmic refracting device |
| US5104214A (en) * | 1984-11-09 | 1992-04-14 | Sims Clinton N | Trial frames, adjustable spectacles and associated lens systems |
| JP2000002857A (ja) * | 1998-06-15 | 2000-01-07 | Eriko Shimizu | 可変屈折角立体視眼鏡 |
| NO311825B1 (no) * | 1999-02-09 | 2002-02-04 | Rolf Stangeland | Anordning for bruk ved testing av synet |
| US7023594B2 (en) * | 2000-06-23 | 2006-04-04 | E-Vision, Llc | Electro-optic lens with integrated components |
| JP4783546B2 (ja) * | 2000-03-30 | 2011-09-28 | 株式会社トプコン | メガネフレーム及びこれを用いた検眼システム |
| JP2001340296A (ja) | 2000-03-30 | 2001-12-11 | Topcon Corp | 検眼システム |
| JP2002315724A (ja) * | 2001-04-20 | 2002-10-29 | Topcon Corp | 検眼装置及びそれに用いる回折格子板 |
| JP3773832B2 (ja) | 2001-10-31 | 2006-05-10 | 株式会社ニデック | 検眼装置 |
| US6923541B2 (en) * | 2001-10-31 | 2005-08-02 | Nidek Co., Ltd. | Optometric apparatus |
| US7118219B2 (en) | 2002-03-18 | 2006-10-10 | Hoya Corporation | Test tool for optometry |
| JP3836057B2 (ja) | 2002-08-21 | 2006-10-18 | 株式会社トプコン | 自覚式検眼器 |
| US20040032568A1 (en) | 2002-08-14 | 2004-02-19 | Kabushiki Kaisha Topcon | Subjective optometric apparatus |
| US7413306B2 (en) | 2004-11-18 | 2008-08-19 | Amo Manufacturing Usa, Llc | Sphero cylindrical eye refraction system using fluid focus electrostatically variable lenses |
| JP4837968B2 (ja) * | 2005-09-30 | 2011-12-14 | 株式会社ニデック | 近用視標呈示装置 |
| JP4801967B2 (ja) * | 2005-11-01 | 2011-10-26 | 株式会社ニデック | 検眼装置 |
| EP2034338A1 (en) | 2007-08-11 | 2009-03-11 | ETH Zurich | Liquid Lens System |
| US7959287B1 (en) * | 2010-05-05 | 2011-06-14 | Norman Saffra | Eyeglass frame sizing systems and methods |
| CN101966074B (zh) * | 2010-10-08 | 2012-10-03 | 黄涨国 | 自动综合验光仪 |
| US9033497B2 (en) | 2011-12-29 | 2015-05-19 | Elwha Llc | Optical device with interchangeable corrective elements |
| KR102099473B1 (ko) * | 2012-07-31 | 2020-04-09 | 가부시키가이샤 니데크 | 검안 장치 |
| FR3019459B1 (fr) * | 2014-04-08 | 2016-04-22 | Essilor Int | Lunettes de compensation visuelle et procede de refraction subjective d'un individu portant ces lunettes |
-
2014
- 2014-04-08 FR FR1453130A patent/FR3019459B1/fr not_active Expired - Fee Related
-
2015
- 2015-04-07 US US15/302,669 patent/US10278573B2/en active Active
- 2015-04-07 WO PCT/FR2015/050890 patent/WO2015155456A1/fr active Application Filing
- 2015-04-07 CN CN201510161980.8A patent/CN104970764B/zh active Active
- 2015-04-07 CN CN201520204373.0U patent/CN204683563U/zh not_active Withdrawn - After Issue
- 2015-04-07 JP JP2016561818A patent/JP6588464B2/ja active Active
- 2015-04-07 EP EP15718543.0A patent/EP3128895B1/fr active Active
- 2015-04-07 BR BR112016023035-3A patent/BR112016023035B1/pt active IP Right Grant
- 2015-04-07 KR KR1020167027953A patent/KR102388278B1/ko active IP Right Grant
- 2015-04-07 CA CA2946643A patent/CA2946643C/fr active Active
Also Published As
| Publication number | Publication date |
|---|---|
| KR20160140710A (ko) | 2016-12-07 |
| KR102388278B1 (ko) | 2022-04-19 |
| JP6588464B2 (ja) | 2019-10-09 |
| WO2015155456A1 (fr) | 2015-10-15 |
| FR3019459A1 (fr) | 2015-10-09 |
| EP3128895A1 (fr) | 2017-02-15 |
| CN104970764A (zh) | 2015-10-14 |
| EP3128895B1 (fr) | 2021-06-30 |
| CN104970764B (zh) | 2017-11-14 |
| FR3019459B1 (fr) | 2016-04-22 |
| JP2017513584A (ja) | 2017-06-01 |
| CN204683563U (zh) | 2015-10-07 |
| CA2946643A1 (fr) | 2015-10-15 |
| BR112016023035A2 (pt) | 2017-08-15 |
| BR112016023035A8 (pt) | 2018-08-14 |
| US20170035289A1 (en) | 2017-02-09 |
| US10278573B2 (en) | 2019-05-07 |
| CA2946643C (fr) | 2023-08-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR112016023035B1 (pt) | Óculos de compensação visual e método de refração subjetiva de um indivíduo portador desse óculos | |
| ES2869390T3 (es) | Refractor y procedimiento para medir la refracción utilizando tal refractor | |
| BR112016016689B1 (pt) | Sistema de compensação visual e dispositivo binocular de optometria | |
| ES2651022T3 (es) | Procedimiento de medición de al menos un parámetro geométrico-fisonómico de implantación de una montura de gafas de corrección visual sobre la cara de un usuario | |
| BR112014033098B1 (pt) | Dispositivo e processo de medição binocular de pelo menos uma característica da refração ocular objetiva de um sujeito | |
| BR112014033110B1 (pt) | Dispositivo e processo de medição de refração ocular objetiva e pelo menos um parâmetro geométrico-morfológico de um indivíduo | |
| ES2544554T3 (es) | Procedimiento de estimación de una postura de referencia | |
| JP7050199B2 (ja) | 視力測定装置、かかる装置を含むアセンブリ及びシステム | |
| CN104010561B (zh) | 用于根据多个凝视方向来确定受试者的至少一个客观眼睛折射参数的装置和方法 | |
| BR112016012721B1 (pt) | Dispositivo e processo de medição da refração subjetiva | |
| ES2899859T3 (es) | Dispositivo de compensación visual, procedimiento de control de un dispositivo de compensación visual y dispositivo binocular de optometría | |
| ES2793504T3 (es) | Dispositivos, procedimientos y programas informáticos para determinar la refracción del ojo | |
| ES2718501T3 (es) | Instrumento para la medida rápida de las propiedades ópticas del ojo en todo el campo visual | |
| CN210384359U (zh) | 一种具有增强视功能的训练仪器 | |
| ES2862141T3 (es) | Dispositivo de optometría y procedimiento para realizar una prueba utilizando tal dispositivo de optometría | |
| CN215584101U (zh) | 具有双眼自动定位跟踪机构的主客观一体式精准验光装置 | |
| CN219895703U (zh) | 连续变焦验光光学系统和便携式主观验光仪 | |
| WO2020240052A1 (es) | Sistema de medición de parámetros clínicos de la función visual | |
| ES2536259B2 (es) | Procedimiento para la medición de la longitud de progresión real de un paciente para la fabricación de una lente progresiva | |
| CZ25479U1 (cs) | Haploskop |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B25A | Requested transfer of rights approved |
Owner name: ESSILOR INTERNATIONAL (FR) |
|
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B350 | Update of information on the portal [chapter 15.35 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 07/04/2015, OBSERVADAS AS CONDICOES LEGAIS |