WO2025120842A1 - 地図情報処理装置および地図情報処理方法 - Google Patents
地図情報処理装置および地図情報処理方法 Download PDFInfo
- Publication number
- WO2025120842A1 WO2025120842A1 PCT/JP2023/044012 JP2023044012W WO2025120842A1 WO 2025120842 A1 WO2025120842 A1 WO 2025120842A1 JP 2023044012 W JP2023044012 W JP 2023044012W WO 2025120842 A1 WO2025120842 A1 WO 2025120842A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- map
- mesh
- map data
- time
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/123—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams
- G08G1/133—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams within the vehicle ; Indicators inside the vehicles or at stops
- G08G1/137—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams within the vehicle ; Indicators inside the vehicles or at stops the indicator being in the form of a map
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
Definitions
- This disclosure relates to a map information processing device that generates map information for autonomous vehicle driving from map data, and in particular to updating the map data.
- HDLs high-precision locators
- Map databases store map data for each area (these areas are referred to as “meshes") obtained by dividing a map into a mesh shape.
- ADAS systems and autonomous driving systems are configured so that the high-precision locator can obtain the latest HD map data from the map distribution server and keep the HD map data stored in the map database up to date.
- the high-precision locator can obtain the latest HD map data from the map distribution server and keep the HD map data stored in the map database up to date.
- the HD map data updates may not be able to keep up with changes in the vehicle's position, and the HD map data may not be updated in time for the vehicle to reach a point where the HD map data update should be completed. In such cases, appropriate driving control is performed to the extent possible using older versions of HD map data.
- Patent Document 1 proposes a technology that prioritizes updating map data for meshes where map data cannot be updated in time, the next time the vehicle travels.
- the present disclosure has been made to solve the above problems, and aims to provide a map information processing device that can increase the probability that automatic vehicle driving control is performed using the latest HD map data.
- the map information processing device includes a local HD map database in which HD map data (high-precision map data) including road shape data for each lane is stored for each mesh obtained by dividing a map into meshes; a server HD map data acquisition unit that acquires server HD map data for each mesh from a map distribution server that distributes server HD map data, which is the latest HD map data; a map information output unit that generates map information for automatic driving including information on the lane shape of the road on which the vehicle is traveling, the position of the vehicle, and information on the lane on which the vehicle is traveling, based on positioning information of the vehicle and the local HD map data, which is the HD map data stored in the local HD map database, and outputs the map information for automatic driving to an automatic driving control device that performs automatic driving control of the vehicle; and a map information output unit that outputs the map information for automatic driving to an automatic driving control device that outputs the map information for automatic driving to a local HD map data acquisition unit that outputs the map information for automatic driving to an automatic driving control device that
- the system includes a map update processing unit that determines that a mesh in which the data version and the server HD map data version do not match is an update-required mesh that requires updating of the local HD map data, and updates the local HD map data of the update-required mesh with the server HD map data, and a driving plan change request unit that calculates an allowable time, which is the time it takes for the vehicle to reach an update completion point where updating of the local HD map data of the update-required mesh should be completed, and a required time, which is the time required to update the local HD map data of the update-required mesh, when the automatic driving control device is executing automatic driving control of the vehicle using map information for automatic driving, and requests the automatic driving control device to change the driving plan of the vehicle in automatic driving control so that the allowable time is equal to or greater than the required time if the allowable time is less than the required time.
- an allowable time which is the time it takes for the vehicle to reach an update completion point where updating of the local HD map data of the update-required
- the map information processing device disclosed herein can increase the probability that automatic vehicle driving control will be performed using the latest HD map data.
- FIG. 1 is a diagram showing an automatic driving control system for a vehicle including a map information processing device according to a first embodiment.
- 11 is a diagram for explaining points that need to be updated when only the local HD map data of one mesh in which the vehicle is located is used to generate map information for autonomous driving.
- FIG. 13 is a diagram showing changes in the relationship between the permissible time and the required time when the traveling speed of the host vehicle is changed.
- FIG. 13 is a diagram showing changes in the relationship between the permissible time and the required time when the traveling speed of the host vehicle is changed.
- FIG. 4 is a flowchart showing the operation of the map information processing device according to the first embodiment
- 11 is a diagram for explaining points that need to be updated when only local HD map data of a 3 ⁇ 3 mesh centered on the mesh in which the vehicle is located is used to generate map information for autonomous driving.
- FIG. 13 is a diagram showing changes in the relationship between the permissible time and the required time when the traveling speed of the host vehicle is changed.
- FIG. 13 is a diagram showing changes in the relationship between the permissible time and the required time when the traveling speed of the host vehicle is changed.
- FIG. 2 is a diagram illustrating an example of a hardware configuration of a map information processing device.
- FIG. 2 is a diagram illustrating an example of a hardware configuration of a map information processing device.
- ⁇ First embodiment> 1 is a diagram showing an automatic driving control system for a vehicle including a map information processing device 10 according to embodiment 1.
- the automatic driving control system includes a vehicle 20 equipped with the map information processing device 10, and a map distribution server 30 that distributes the latest HD map data.
- the vehicle 20 equipped with the map information processing device 10 will be referred to as the "own vehicle.”
- the map information processing device 10 is mounted on the vehicle 20.
- the map information processing device 10 does not necessarily have to be permanently installed in the vehicle 20, and may be, for example, a device that can be removed from the vehicle 20, or may be realized as an application that runs on a mobile terminal such as a mobile phone, smartphone, or PND (Personal Navigation Device).
- the map distribution server 30 is a communication server that distributes the latest HD map data.
- server HD map data the latest HD map data distributed by the map distribution server 30.
- the map distribution server 30 has a server HD map database 31 that stores server HD map data for each mesh, and in response to a request from the map information processing device 10, transmits the server HD map data of the requested mesh to the map information processing device 10.
- the map information processing device 10 is connected to a positioning device 21, an automatic driving control device 22, and a communication terminal 23 mounted on the vehicle 20.
- the positioning device 21 measures the position of the vehicle 20 using a positioning signal received from the Global Navigation Satellite System (GNSS) and outputs positioning information that is the positioning result.
- GNSS Global Navigation Satellite System
- the positioning device 21 may have a function of correcting the positioning result of the vehicle 20 using information obtained from the vehicle speed sensor, direction sensor, surrounding sensors, etc. of the vehicle 20.
- the automatic driving control device 22 has a function of controlling the automatic driving of the vehicle 20 based on the map information for automatic driving provided by the map information processing device 10.
- the map information for automatic driving is created from HD map data, and it is desirable to create it using the latest HD map data possible.
- the autonomous driving control performed by the autonomous driving control device 22 may include controls that do not use map information for autonomous driving.
- adaptive cruise control which adjusts the driving speed of the vehicle 20 to match the vehicle ahead
- lane keep assist which controls the steering of the vehicle 20 to match lane markings, do not require map information for autonomous driving.
- the communication terminal 23 is a means for communicating with the map distribution server 30.
- the communication terminal 23 may be a communication device dedicated to communication with the map distribution server 30, or may be a general-purpose communication device such as a mobile phone or smartphone.
- the map information processing device 10 includes a local HD map database 11, a server HD map data acquisition unit 12, a map information output unit 13, a map update processing unit 14, and a driving plan change request unit 15.
- the local HD map database 11 stores HD map data for each mesh.
- the HD map data stored in the local HD map database 11 will be referred to as "local HD map data.”
- the server HD map data acquisition unit 12 acquires the latest HD map data, that is, the server HD map data, from the map distribution server 30 via the automatic driving control device 22.
- the map information output unit 13 generates map information for automatic driving to control the automatic driving of the vehicle 20 based on the positioning information of the vehicle 20 acquired from the positioning device 21 and the local HD map data stored in the local HD map database 11, and outputs the generated map information for automatic driving to the automatic driving control device 22.
- the map information for automatic driving includes information on the lane shape of the road on which the vehicle 20 is traveling, the position of the vehicle 20, and the lane on which the vehicle 20 is traveling.
- the lane on which the vehicle 20 is traveling can be determined from the time series information on the position of the vehicle 20 and the lane position information included in the local HD map data.
- the map information for automatic driving may further include various information included in the HD map data, such as the attributes of each lane, information on surrounding facilities, and information on road branching and merging points.
- the map update processing unit 14 performs update processing of the local HD map data stored in the local HD map database 11.
- the update processing of the local HD map data may be simply referred to as the "map update processing.”
- the map update processing by the map update processing unit 14 is performed in the following procedure.
- the map update processing unit 14 acquires the planned driving route of the vehicle 20 from the automatic driving control device 22, and identifies meshes related to the planned driving route of the vehicle 20.
- “Meshes related to the planned driving route” refers to meshes involved in the creation of map information for automatic driving when the vehicle 20 drives the planned driving route in automatic driving. For example, if only the local HD map data of one mesh in which the vehicle 20 is located is used to generate map information for automatic driving, the meshes related to the planned driving route are only the meshes including the planned driving route (meshes through which the planned driving route passes). However, if local HD map data of a 3x3 mesh centered on the mesh in which the vehicle 20 is located is used to generate map information for automatic driving, the meshes related to the planned driving route are the mesh including the planned driving route and its adjacent meshes.
- the map update processing unit 14 accesses the local HD map database 11 and the map distribution server 30, and compares the version of the local HD map data of each mesh related to the planned driving route of the vehicle 20 with the version of the server HD map data.
- the version of the local HD map data different from the server HD map data is an old version of the HD map data. Therefore, the map update processing unit 14 determines that, among the meshes related to the planned driving route of the vehicle 20, the meshes whose local HD map data version does not match the server HD map data version are meshes whose local HD map data needs to be updated.
- the map update processing unit 14 acquires the server HD map data of the meshes that need to be updated from the map distribution server 30 via the server HD map data acquisition unit 12, and updates the local HD map data of the meshes that need to be updated with the server HD map data.
- the server HD map data for one mesh is stored in one file in the server HD map database 31 of the map distribution server 30, and the map information output unit 13 downloads the server HD map data in file units.
- the server HD map data for one mesh is composed of one file, and one file may contain server HD map data for multiple meshes.
- the server HD map data for one mesh may be composed of multiple files.
- the determination of whether a mesh needs to be updated does not need to be performed for all meshes related to the planned travel route of the vehicle 20, but may be performed only for meshes within a predetermined distance (or route distance) from the position of the vehicle 20.
- the above “predetermined distance” may be, for example, the length of one side of the mesh (5 km if one mesh is 5 km x 5 km in size) or three times that length (15 km). This "predetermined distance” may also be a variable distance that becomes longer the faster the vehicle 20 is traveling.
- the map update processing unit 14 may also be provided with a dedicated memory that stores information about the version of the local HD map data for each mesh. In this case, the map update processing unit 14 can check the version of the local HD map data without accessing the local HD map database 11, and can quickly determine whether each mesh needs to be updated.
- the map update processing unit 14 does not necessarily need to obtain the planned driving route of the vehicle 20 from the automatic driving control device 22, but may obtain it from another in-vehicle information system, such as a navigation system.
- the map update processing unit 14 may also regard the route along the road on which the vehicle 20 is traveling as the planned driving route of the vehicle 20, or may estimate the planned driving route from the driving history of the vehicle 20.
- the driving plan change request unit 15 requests the automatic driving control device 22 to change the driving plan of the vehicle 20 in the automatic driving control so that the map update process will be completed in time.
- the point where the update of the local HD map data should be completed is referred to as the "update completion point”.
- the driving plan change request unit 15 calculates the allowable time, which is the time it takes for the host vehicle 20 to reach the update completion point, and the required time, which is the time required for the map update process of the update-required mesh, and compares the allowable time with the required time. At this time, if the allowable time is shorter than the required time, it is expected that the map update process will not be completed in time. Therefore, if the allowable time is shorter than the required time, the driving plan change request unit 15 requests the automatic driving control device 22 to change the driving plan of the host vehicle 20 so that the allowable time is equal to or greater than the required time.
- the driving plan change request unit 15 changes the driving plan so that the driving speed of the host vehicle 20 decreases, it will take the host vehicle 20 to reach the update completion point later, and the allowable time will be longer, so the allowable time can be made greater than the required time.
- the map update process is prevented from being completed in time. This increases the probability that the autonomous driving control of the vehicle 20 will be performed using the latest HD map data (i.e., local HD map data of the same version as the server HD map data).
- the point requiring update completion is a point where the map update process should be completed before the vehicle 20 reaches that point.
- a typical example of a point requiring update completion is the boundary of a mesh.
- the point requiring update completion may be a fixed distance before the boundary of the mesh.
- the "fixed distance” here is, for example, 1/10 of the distance of one side of the mesh. This "fixed distance” may also be a variable distance that becomes longer the faster the vehicle 20 is traveling. For example, when only the local HD map data of one mesh in which the vehicle 20 is located is used to generate map information for autonomous driving, the point requiring update completion is the point where the planned travel route of the vehicle 20 enters the mesh requiring update.
- FIG. 2 is a diagram for explaining points that need to be updated when only the local HD map data of one mesh in which the vehicle 20 is located is used to generate map information for autonomous driving.
- FIG. 2 shows a 6x6 mesh.
- Each mesh is assigned a mesh number Mnm (n is the row number, m is the column number).
- a mesh related to a planned driving route is a mesh through which the planned driving route passes.
- meshes M23 and M33 are assumed to be meshes that require update.
- the map update process for mesh M23 that requires update must be completed by the time the vehicle 20 reaches mesh M23 that requires update. Therefore, the point that requires update completion for mesh M23 that requires update is point P2 where the planned travel route enters mesh M23 that requires update.
- the point that requires update completion for mesh M33 that requires update is point P3 where the planned travel route enters mesh M33 that requires update.
- Whether the map update process for the mesh M23 that needs to be updated can be completed in time before the vehicle 20 reaches the point P2 that needs to be updated can be determined by whether the allowable time, which is the time it takes for the vehicle 20 to reach the point P2 that needs to be updated from the current position P, is longer than the required time, which is the time it takes to complete the map update process for the mesh M23 that needs to be updated.
- the required time Tn(M23) can be calculated by dividing the size of the server HD map data for mesh M23 by the communication speed.
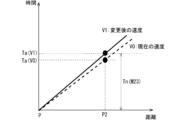
- Figure 3 is a diagram showing the relationship between the allowable time and the required time.
- the dashed line graph in Figure 3 indicates that if the traveling speed of the vehicle 20 is V0, then the allowable time Ta (V0) ⁇ the required time Tn (M23), and the map update process for the mesh M23 that needs to be updated will not be completed in time by the time the vehicle 20 reaches the update completion point P2.
- the allowable time Ta (V0) ⁇ the required time Tn (M23) + ⁇ ( ⁇ is the margin) it may be determined that the map update process for the mesh M23 that needs to be updated will not be completed in time.
- the change in the driving plan of the vehicle 20 requested by the driving plan change request unit 15 to the automatic driving control device 22 is for the purpose of making the allowable time Ta ⁇ the required time Tn, for example, a request to reduce the average driving speed of the vehicle 20.
- the average driving speed of the vehicle 20 requested by the driving plan change request unit 15 is V1
- V1 ⁇ (P2-P)/Tn (M23) it is sufficient that the relationship V1 ⁇ (P2-P)/Tn (M23) is satisfied.
- a margin may be taken and V1 ⁇ (P2-P)/Tn (M23) - ⁇ ( ⁇ is a margin).
- the driving plan change request unit 15 makes a request to change the driving plan (driving speed) of the vehicle 20 up to the update completion point P2 for the update-required mesh M23 and a request to change the driving plan of the vehicle 20 up to the update completion point P2 for the update-required mesh M33, independently of each other.
- the request to change the driving plan may be made by regarding the multiple update-required meshes as a group (a single group) of update-required meshes so that the driving speed of the vehicle 20 does not change significantly at the update completion points corresponding to each update-required mesh. This will be described in detail in Modification Example 8 below.
- FIG. 5 is a flowchart showing the operation of the map information processing device 10 according to the first embodiment. The operation of the map information processing device 10 will be described below based on the flowchart in FIG. 5.
- the map information processing device 10 checks whether the automatic driving control device 22 is performing automatic driving control of the vehicle 20 using map information for automatic driving (step S101).
- step S101 If automatic driving control using map information for automatic driving is not being executed (NO in step S101), the map information processing device 10 checks whether the driving of the vehicle 20 has ended (step S111). If the driving of the vehicle 20 has not ended (NO in step S111), the process returns to step S101, and if the driving of the vehicle 20 has ended (YES in step S111), the process in FIG. 5 ends.
- the map information output unit 13 acquires positioning information of the host vehicle 20 from the positioning device 21 (step S102), and acquires local HD map data of the vicinity of the host vehicle 20 from the local HD map database 11 (step S103). The map information output unit 13 then generates map information for automatic driving from the information (step S104), and transmits the generated map information for automatic driving to the automatic driving control device 22 (step S105). The automatic driving control device 22 continues automatic driving control of the host vehicle 20 based on this map information for automatic driving.
- the map update processing unit 14 acquires the planned driving route of the vehicle 20 from the automatic driving control device 22 (step S106), and checks whether there is a mesh that needs to be updated on the planned driving route within a predetermined distance from the vehicle 20 (step S107). If there is no mesh that needs to be updated on the planned driving route within a predetermined distance from the vehicle 200 (NO in step S107), the process proceeds to step S111.
- the driving plan change request unit 15 determines whether or not the map update process for the mesh that needs to be updated can be completed before the vehicle 20 reaches the point where the update needs to be completed (step S108). That is, the driving plan change request unit 15 calculates the allowable time, which is the time it takes for the vehicle 20 to reach the point where the update needs to be completed, and the required time, which is the time required to update the local HD map data of the mesh that needs to be updated, and determines whether the allowable time is longer than the required time.
- step S108 If it is determined that the map update process of the mesh that needs to be updated cannot be completed before the host vehicle 20 reaches the point that needs to be updated (i.e., the allowable time ⁇ the required time) (NO in step S108), the driving plan change request unit 15 requests the automatic driving control device 22 to change the driving plan of the host vehicle 20 so that the map update process of the mesh that needs to be updated can be completed before the host vehicle 20 reaches the point that needs to be updated (step S109). If it is determined that the map update process of the mesh that needs to be updated can be completed before the host vehicle 20 reaches the point that needs to be updated (i.e., the allowable time ⁇ the required time) (YES in step S108), step S109 is skipped.
- the map update processing unit 14 acquires the server HD map data of the mesh that needs to be updated from the map distribution server 30, and executes the map update processing of the mesh that needs to be updated (step S110). After that, the process proceeds to step S111, and the above operations are repeated until the vehicle 20 stops traveling.
- the map information processing device 10 of this embodiment when it is determined that the automatic map update of a mesh that needs to be updated will not be completed in time, the driving plan of the vehicle 20 is changed so that it will be completed in time, thereby increasing the probability that the automatic driving control of the vehicle 20 will be performed using the latest HD map data.
- the driving plan change request unit 15 if a mesh requiring update is found on the planned driving route within a predetermined distance from the vehicle 200, the driving plan change request unit 15 immediately calculates the allowable time and required time and determines whether they are longer than the allowable time and the required time, but this determination may be made at a specific timing. For example, the driving plan change request unit 15 may calculate the allowable time and required time when the route distance from the vehicle 20 to the update completion point reaches a predetermined value.
- FIG. 6 is a diagram for explaining points that require update completion when local HD map data of a 3 ⁇ 3 mesh centered on the mesh where the vehicle 20 is located is used to generate map information for autonomous driving.
- the vehicle 20 is currently traveling in mesh M14, and will travel along the planned travel route from mesh M14 to mesh M24 to mesh M23 to mesh M33, etc.
- the meshes related to the planned driving route are the mesh that contains the planned driving route and its adjacent meshes.
- meshes M12, M22, M32, M42, M43, and M44 are assumed to be meshes that need to be updated.
- the map information output unit 13 When the vehicle 20 is located in mesh M14, the map information output unit 13 generates map information for autonomous driving using local HD map data for nine meshes centered on mesh M14: meshes M03, M04, M05, M13, M14, M15, M23, M24, and M25.
- the map information output unit 13 When the vehicle 20 moves from mesh M14 to mesh M24, the map information output unit 13 generates map information for autonomous driving using the local HD map data of nine meshes with mesh M24 at the center, namely meshes M13, M14, M15, M23, M24, M25, M33, M34, and M35.
- the local HD map data of M13, M14, M15, M23, M24, and M25 is stored in the cache memory when the vehicle 20 is located at mesh M14
- the meshes for which the map information output unit 13 needs to acquire new local HD map data are meshes M33, M34, and M35.
- Meshes M33, M34, and M35 are not meshes that require updating.
- the map information output unit 13 When the vehicle 20 moves from mesh M24 to mesh M23, the map information output unit 13 generates map information for autonomous driving using the local HD map data of nine meshes with mesh M23 at the center, namely meshes M12, M13, M14, M22, M23, M24, M32, M33, and M34.
- the local HD map data of M13, M14, M23, M24, M33, and M34 is stored in the cache memory when the vehicle 20 is located in mesh M24
- the meshes from which the map information output unit 13 needs to acquire new local HD map data are meshes M12, M22, and M32.
- Meshes M12, M22, and M32 are meshes that need to be updated.
- the update completion point for meshes M12, M22, and M32 that require updating is point P2 where the planned driving route of the host vehicle 20 enters mesh M23.
- the update completion point is a point where the mesh that requires updating will be included in the mesh group when the host vehicle 20 travels along the planned driving route.
- the time it takes for the vehicle 20 to reach point P2 from point P0 is calculated as the allowable time
- the time required for the map update process of the update-required meshes M12, M22, and M32 is calculated as the required time, and it may be determined whether the map update process of the update-required meshes M12, M22, and M32 will be completed in time.
- the nine meshes centered on the mesh where the vehicle 20 is located include meshes M42, M43, and M44 that require updating. Therefore, the update completion point for meshes M42, M43, and M44 that require updating is point P3 where the planned driving route of the vehicle 20 enters mesh M33. Therefore, the driving plan change request unit 15 calculates the time it takes for the vehicle 20 to reach point P3 from point P2 as the allowable time, and calculates the time required for the map update processing of meshes M42, M43, and M4 that require updating as the required time, and determines whether the map update processing of meshes M42, M43, and M4 that require updating will be completed in time.
- the point where update completion is required is not the point where the planned driving route of the vehicle 200 enters the mesh that needs to be updated, but the point where the planned driving route of the vehicle 200 enters a mesh that is closer to the mesh that needs to be updated.
- the range of the mesh in which the local HD map data is used to generate the map information for autonomous driving such as a configuration in which local HD map data of a 5x5 mesh centered on the mesh in which the vehicle 20 is located is used to generate the map information for autonomous driving, or a configuration in which the range of the mesh in which the local HD map data is used to generate the map information for autonomous driving changes depending on the traveling direction of the vehicle 20.
- the point requiring update completion changes depending on the range of the mesh in which the local HD map data is used to generate the map information for autonomous driving.
- the HD map data for such meshes does not contain high-precision road data, so the amount of data is not large. However, it does contain information to determine whether the road on which the vehicle 20 is traveling is a road represented in the HD map data (e.g., a highway) or a road not represented in the HD map data (e.g., a general road), as well as information on the attributes of the mesh.
- a road represented in the HD map data e.g., a highway
- a road not represented in the HD map data e.g., a general road
- the driving plan change request unit 15 may determine whether the map update process of the update-required mesh will be in time when the route distance from the vehicle 20 to the update-required point becomes a predetermined value. Also, when the route distance from the vehicle 20 to the update-required point becomes shorter than a predetermined value, the driving plan change request unit 15 may periodically calculate the allowable time and the required time, and repeat the process of re-determining whether the map update process of the update-required mesh will be in time, and request the automatic driving control device 22 to change the driving plan so that the allowable time is maintained equal to or longer than the required time.
- the timing for re-determining whether the map update process for the mesh that needs to be updated will be completed in time may be specified in any way, and may be, for example, every fixed time (e.g., one minute) or every time the vehicle 200 travels a fixed distance (e.g., one kilometer).
- the map update processing unit 14 may re-determine whether the map update process for the mesh that needs to be updated will be completed in time.
- a difference between the driving plan and the actual driving of the vehicle 20 means that there is a change in the time at which the vehicle 20 reaches the point where the update needs to be completed. For example, a difference occurs between the driving plan and the actual driving of the vehicle 20 when the vehicle 20 cannot drive according to the driving plan because the actual traffic conditions are different from those predicted.
- This modification prevents unnecessary execution of the process of determining whether the map update process for the mesh that needs to be updated will be completed in time (S108 in FIG. 5).
- the driving plan change request unit 15 may request that the vehicle 20 drive the section from the current position of the vehicle 20 to the point where the update completion is required while gradually changing the driving speed.
- the driving plan change request unit 15 may request the automatic driving control device 22 to change the driving plan by reducing the driving speed of the vehicle 20 to sufficiently extend the allowable time, and then gradually increasing the driving speed as the vehicle approaches the update completion point.
- the driving plan change request unit 15 makes an unnatural request to the automatic driving control device 22, such as drastically reducing the driving speed of the vehicle 20.
- the driving plan change request unit 15 may request the host vehicle 20 to change lanes to a lane in which vehicles move slower than the lane in which the host vehicle 20 is currently traveling. By doing so, the traveling speed of the host vehicle 20 naturally decreases. In addition, if the traveling speed of the host vehicle 20 is reduced without changing lanes, there is a risk of impeding the flow of vehicles on the road in which the host vehicle 20 is currently traveling, but this can be prevented by changing lanes to a lane in which vehicles move slower than the lane in which the host vehicle 20 is currently traveling.
- the driving plan change request unit 15 may notify the driver of the vehicle 20 that the map update process for the mesh that needs to be updated will not be completed in time.
- whether or not the driving plan change request unit 15 notifies the driver that the map update process for the mesh that needs to be updated will not be completed in time, and whether or not to request the autonomous driving control device 22 to change the driving plan of the vehicle 20, may be switched depending on the level of autonomous driving currently being performed.
- Fig. 7 An example of such switching is shown in Fig. 7.
- the relationship between the autonomous driving level and whether or not to issue a notification and a request to change the driving plan is as follows. If the autonomous driving level is 0 (no autonomous driving control), neither a notification nor a request to change the driving plan is implemented. If the autonomous driving level is 1 or 2, only a notification is implemented, and a request to change the driving plan is not implemented (the driver decides whether or not to adjust the speed of the vehicle 20 in response to the notification). In the case of autonomous driving level 3, both the notification and the request to change the driving plan are executed (the driver may adjust the speed of the vehicle 20, or the speed is adjusted by the autonomous driving control even if the driver does not adjust the speed). ⁇ For autonomous driving levels 4 or 5, no notification is issued and a request to change the driving plan is made
- the relationship between the autonomous driving level and whether or not to issue notifications and requests to change the driving plan is not limited to the example in FIG. 7 and may be specified in any manner.
- the relationship between the autonomous driving level and whether or not to issue notifications and requests to change the driving plan may be changed by the driver according to his or her preferences.
- the driving plan change request unit 15 may use the communication terminal 23 to obtain road traffic information for the section from the position of the vehicle 20 to the point where the update needs to be completed, estimate the allowable traveling speed of the vehicle 20 for that section from the obtained road traffic information, and calculate the allowable time based on the estimated allowable traveling speed.
- the driving plan change request unit 15 can estimate the allowable time to be longer. This can prevent the driving plan change request unit 15 from requesting the automatic driving control device 22 to unnecessarily decelerate the vehicle 20.
- the driving plan change request unit 15 may obtain information about the communication environment in the section from the position of the vehicle 20 to the point where the update needs to be completed, in particular information about the possible communication speed, estimate the possible communication speed with the map distribution server 30 from that information, and calculate the required time based on the estimated result of the possible communication speed.
- the driving plan change request unit 15 can estimate the required time to be longer. This prevents the required time from being undercalculated, and reduces the possibility that the map update process for the mesh that needs to be updated will not be completed in time.
- the driving plan change request unit 15 may also predict the number of other vehicles traveling near the vehicle 20 from road traffic information, and estimate that the communication speed will be lower when the number is large than when the number is small.
- the driving plan change request unit 15 may calculate a certain driving speed at which the map update process for all of the multiple update-required meshes constituting the group of update-required meshes is completed in time, and may make a request to change the driving plan of the vehicle 20.
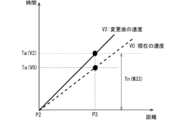
- the driving plan change request unit 15 independently performs a process of determining whether the map update process of the update-required meshes M23 and M33 will be in time when the vehicle 20 reaches the point P0. As a result, it is determined that the map update process will be in time if the driving speed in the section from point P0 to point P2 is reduced from the current V0 to V1, and the driving speed in the section from point P2 to point P3 is further reduced to V2, as shown in FIG. 8.
- the driving plan change request unit 15 regards the update-required meshes M23 and M33 as a group of update-required meshes, calculates a constant driving speed V3 at which the map update process of both the update-required meshes M23 and M33 will be in time, as shown in FIG. 9, and requests the automatic driving control device 22 to set the driving speed of the vehicle 20 to V3.
- V3 satisfies the condition V3 ⁇ (P3-P0)/(Tn(M23)+Tn(M23)).
- the required time can be shortened and the frequency with which the driving plan change request unit 15 requests the automatic driving control device 22 to change the driving plan of the vehicle 20 can be reduced.
- the driving plan change request unit 15 may calculate the required time after restricting the execution of updating the SD map data.
- the consumption of communication resources by in-vehicle systems with low importance is limited, and the communication resources secured thereby can be allocated to the map update process, thereby shortening the required time and reducing the frequency with which the driving plan change request unit 15 requests the automatic driving control device 22 to change the driving plan of the vehicle 20.
- the driving plan change request unit 15 does not need to request a change to the driving plan to the automatic driving control device 22 even if reducing the driving speed of the vehicle 20 in order to make the allowable time longer than the required time would delay the arrival time at the destination (including stopover points) by more than a certain amount.
- the map update process for the mesh that needs to be updated will not be completed in time, and automatic driving control will be performed based on map information for automatic driving that was generated using an old version of local HD map data, so the driver of the vehicle 20 may be notified of this.
- the driver can choose to continue driving the vehicle 20 as is, or to enter a service area (SA) or parking area (PA) and wait for the map update process to be completed.
- SA service area
- PA parking area
- the driving plan change request unit 15 when a mesh requiring update for which the map update process cannot be completed in time is found, the driving plan change request unit 15 always requests the automatic driving control device 22 to change the driving plan of the vehicle 20. However, the driving plan change request unit 15 may request the automatic driving control device 22 to change the driving plan of the vehicle 20 only when the mesh requiring update for which the map update process cannot be completed in time is a specific mesh that requires advanced automatic driving control.
- Specific meshes that require advanced automated driving control include meshes that include points where lane changes are required, and meshes that include junctions (JCTs) or interchanges (ICs) where different roads connect.
- the driving plan change request unit 15 requests the automated driving control device 22 to change the driving plan only when the allowable time is less than the required time and the mesh that needs to be updated includes a point where the vehicle 20 needs to change lanes or a junction or interchange where different roads connect.
- points where lane changes are required also include points of entry to service areas and parking areas.
- a mesh that includes an interchange may be treated as a specific mesh only when the vehicle 20 uses the interchange to exit the expressway.
- FIG. 10 and 11 are diagrams showing examples of the hardware configuration of the map information processing device 10.
- the functions of the components of the map information processing device 10 shown in FIG. 1 are realized, for example, by a processing circuit 50 shown in FIG. 10. That is, the map information processing device 10 stores HD map data (high-precision map data) including road shape data for each lane in a local HD map database 11 for each mesh obtained by dividing a map into meshes, generates map information for automatic driving including information on the lane shape of the road on which the host vehicle 20 is traveling, the position of the host vehicle 20, and the lane on which the host vehicle 20 is traveling based on the positioning information of the host vehicle 20 and the local HD map data, which is the HD map data stored in the local HD map database 11, outputs the map information for automatic driving to an automatic driving control device 22 that performs automatic driving control of the host vehicle 20, obtains server HD map data for each mesh from a map distribution server 30 that distributes server HD map data, which is the latest HD map data, and outputs the map information for automatic
- the automatic driving control device 22 determines a mesh in which the version of the server HD map data does not match as a mesh requiring update of the local HD map data, and calculates an allowable time, which is the time required for the vehicle 20 to reach an update completion point where the update of the local HD map data of the mesh requiring update should be completed, and a required time, which is the time required to update the local HD map data of the mesh requiring update, when the automatic driving control device 22 is executing automatic driving control of the vehicle 20 using the map information for automatic driving, and requests the automatic driving control device 22 to change the driving plan of the vehicle 20 in the automatic driving control so that the allowable time is equal to or greater than the required time, and updates the local HD map data of the mesh requiring update with the server HD map data.
- the processing circuit 50 may be dedicated hardware, or may be configured using a processor (also called a central processing unit (CPU), processing device, arithmetic device, microprocessor, microcomputer, or DSP (Digital Signal Processor)) that executes a program stored in a memory.
- a processor also called a central processing unit (CPU), processing device, arithmetic device, microprocessor, microcomputer, or DSP (Digital Signal Processor)
- CPU central processing unit
- DSP Digital Signal Processor
- the processing circuit 50 may be, for example, a single circuit, a composite circuit, a programmed processor, a parallel programmed processor, an ASIC (Application Specific Integrated Circuit), an FPGA (Field-Programmable Gate Array), or a combination of these.
- Each function of the components of the map information processing device 10 may be realized by a separate processing circuit, or these functions may be realized together by a single processing circuit.
- Figure 11 shows an example of the hardware configuration of the map information processing device 10 when the processing circuit 50 is configured using a processor 51 that executes a program.
- the functions of the components of the map information processing device 10 are realized by software, etc. (software, firmware, or a combination of software and firmware).
- the software, etc. is written as a program and stored in memory 52.
- the processor 51 realizes the functions of each part by reading and executing the program stored in memory 52.
- the map information processing device 10 when executed by the processor 51, performs the following processes: a process of storing, in the local HD map database 11, HD map data (high-precision map data) including road shape data for each lane, for each mesh obtained by dividing a map into meshes; a process of generating map information for automatic driving including information on the lane shape of the road on which the host vehicle 20 is traveling, the position of the host vehicle 20, and information on the lane on which the host vehicle 20 is traveling, based on the positioning information of the host vehicle 20 and the local HD map data, which is the HD map data stored in the local HD map database 11, and outputting the map information for automatic driving to the automatic driving control device 22 that performs automatic driving control of the host vehicle 20; a process of acquiring server HD map data for each mesh from the map distribution server 30, which distributes server HD map data, which is the latest HD map data; and a process of extracting data from the local HD map data among the meshes related to the planned driving route of the host vehicle 20.
- HD map data high-pre
- the memory 52 is provided for storing a program that ultimately executes the following: a process for determining that a mesh whose version does not match the version of the server HD map data is a mesh that requires updating of the local HD map data; a process for calculating an allowable time, which is the time it takes for the vehicle 20 to reach an update completion point where the update of the local HD map data of the mesh that requires updating should be completed, and a required time, which is the time required to update the local HD map data of the mesh that requires updating, when the automatic driving control device 22 is executing automatic driving control of the vehicle 20 using map information for automatic driving, and a process for requesting the automatic driving control device 22 to change the driving plan of the vehicle 20 in the automatic driving control so that the allowable time is equal to or greater than the required time; and a process for updating the local HD map data of the mesh that requires updating with the server HD map data.
- this program can be said to cause a computer to execute the procedure and method of the operation of the components of the map information processing device 10.
- memory 52 may be, for example, non-volatile or volatile semiconductor memory such as RAM (Random Access Memory), ROM (Read Only Memory), flash memory, EPROM (Erasable Programmable Read Only Memory), EEPROM (Electrically Erasable Programmable Read Only Memory), HDD (Hard Disk Drive), magnetic disk, flexible disk, optical disk, compact disk, mini disk, DVD (Digital Versatile Disc) and their drive devices, or any other storage medium that will be used in the future.
- RAM Random Access Memory
- ROM Read Only Memory
- flash memory EPROM (Erasable Programmable Read Only Memory), EEPROM (Electrically Erasable Programmable Read Only Memory), HDD (Hard Disk Drive), magnetic disk, flexible disk, optical disk, compact disk, mini disk, DVD (Digital Versatile Disc) and their drive devices, or any other storage medium that will be used in the future.
- EPROM Erasable Programmable Read Only Memory
- EEPROM Electrically Erasable Programmable Read Only Memory
- HDD Hard Disk Drive
- the above describes a configuration in which the functions of the components of the map information processing device 10 are realized by either hardware or software, etc.
- this is not limited to the above, and the configuration may be such that some of the components of the map information processing device 10 are realized by dedicated hardware, and other components are realized by software, etc.
- the functions of some components may be realized by the processing circuit 50 as dedicated hardware, and for the functions of other components to be realized by the processing circuit 50 as the processor 51 reading and executing a program stored in the memory 52.
- the map information processing device 10 can realize each of the above-mentioned functions through hardware, software, etc., or a combination of these.
- map information processing device 11 local HD map database, 12 server HD map data acquisition unit, 13 map information output unit, 14 map update processing unit, 15 driving plan change request unit, 20 vehicle, 21 positioning device, 22 automatic driving control device, 23 communication terminal, 30 map distribution server, 31 server HD map database, 50 processing circuit, 51 processor, 52 memory.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Mathematical Physics (AREA)
- Automation & Control Theory (AREA)
- Business, Economics & Management (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2025561645A JPWO2025120842A1 (https=) | 2023-12-08 | 2023-12-08 | |
| PCT/JP2023/044012 WO2025120842A1 (ja) | 2023-12-08 | 2023-12-08 | 地図情報処理装置および地図情報処理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/044012 WO2025120842A1 (ja) | 2023-12-08 | 2023-12-08 | 地図情報処理装置および地図情報処理方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2025120842A1 true WO2025120842A1 (ja) | 2025-06-12 |
Family
ID=95979775
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/044012 Pending WO2025120842A1 (ja) | 2023-12-08 | 2023-12-08 | 地図情報処理装置および地図情報処理方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2025120842A1 (https=) |
| WO (1) | WO2025120842A1 (https=) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022085173A1 (ja) * | 2020-10-23 | 2022-04-28 | 三菱電機株式会社 | 地図データ管理装置および地図データ管理方法 |
| JP2023031225A (ja) * | 2021-08-23 | 2023-03-08 | 株式会社デンソー | 提示制御装置、提示制御プログラム、自動運転制御装置、及び自動運転制御プログラム |
| JP2023081581A (ja) * | 2021-12-01 | 2023-06-13 | トヨタ自動車株式会社 | 給電システム、サーバ、及び給電方法 |
-
2023
- 2023-12-08 WO PCT/JP2023/044012 patent/WO2025120842A1/ja active Pending
- 2023-12-08 JP JP2025561645A patent/JPWO2025120842A1/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022085173A1 (ja) * | 2020-10-23 | 2022-04-28 | 三菱電機株式会社 | 地図データ管理装置および地図データ管理方法 |
| JP2023031225A (ja) * | 2021-08-23 | 2023-03-08 | 株式会社デンソー | 提示制御装置、提示制御プログラム、自動運転制御装置、及び自動運転制御プログラム |
| JP2023081581A (ja) * | 2021-12-01 | 2023-06-13 | トヨタ自動車株式会社 | 給電システム、サーバ、及び給電方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2025120842A1 (https=) | 2025-06-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7043466B2 (ja) | 自動運転車両のための以前の運転軌跡に基づくリアルタイムマップ生成方法 | |
| CN110361021B (zh) | 车道线拟合方法及系统 | |
| CN109387207B (zh) | 经由基于云的系统向自主车辆提供地图的系统和方法 | |
| US20150300825A1 (en) | Methods and systems for generating a horizon for use in an advanced driver assistance system (adas) | |
| JP4910510B2 (ja) | 制御用情報記憶装置及びプログラム | |
| CN108603763A (zh) | 行驶计划生成装置、行驶计划生成方法和行驶计划生成程序 | |
| JP6419666B2 (ja) | 自動運転装置 | |
| JP7238138B2 (ja) | 車両制御装置 | |
| CN114802234B (zh) | 一种智能巡航中道路边缘避让方法及系统 | |
| KR102575727B1 (ko) | 차량의 군집 주행 제어 장치, 그를 포함한 시스템 및 그 방법 | |
| CN116324892B (zh) | 地图数据管理装置和地图数据管理方法 | |
| US20220340142A1 (en) | Preceding vehicle identification apparatus and preceding vehicle identification method | |
| CN117146844A (zh) | 路径规划中参考线平滑优化方法、装置、设备及介质 | |
| JP2021196874A (ja) | 走行支援方法及び走行支援装置 | |
| CN110770542B (zh) | 信息管理装置 | |
| JP7378633B2 (ja) | 地図データ更新装置及び地図データ更新方法 | |
| WO2025120842A1 (ja) | 地図情報処理装置および地図情報処理方法 | |
| CN113815651B (zh) | 一种无人设备控制方法、装置、设备及存储介质 | |
| CN114877912A (zh) | 一种车辆导航信息生成方法、装置及设备 | |
| KR20230124815A (ko) | 자율 주행 제어 장치, 그를 포함하는 차량 시스템, 및 그 방법 | |
| US20250123109A1 (en) | Controlled-Access Highway Egress Route Determination | |
| US12522245B2 (en) | Computer-implemented method for managing an operational design domain's expansion for an automated driving system | |
| CN107531246B (zh) | 规划的路线的周围环境数据的提供 | |
| JP7624878B2 (ja) | 車両運動制御装置、および、車両運動制御方法 | |
| JP2024046060A (ja) | 車両制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23960853 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2025561645 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2025561645 Country of ref document: JP |