WO2024157664A1 - エンドエフェクタ及びロボットアーム - Google Patents
エンドエフェクタ及びロボットアーム Download PDFInfo
- Publication number
- WO2024157664A1 WO2024157664A1 PCT/JP2023/045545 JP2023045545W WO2024157664A1 WO 2024157664 A1 WO2024157664 A1 WO 2024157664A1 JP 2023045545 W JP2023045545 W JP 2023045545W WO 2024157664 A1 WO2024157664 A1 WO 2024157664A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- end effector
- resin
- pattern
- circuit
- straight line
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/081—Touching devices, e.g. pressure-sensitive
- B25J13/082—Grasping-force detectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/081—Touching devices, e.g. pressure-sensitive
- B25J13/084—Tactile sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/085—Force or torque sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/06—Safety devices
-
- C—CHEMISTRY; METALLURGY
- C08—ORGANIC MACROMOLECULAR COMPOUNDS; THEIR PREPARATION OR CHEMICAL WORKING-UP; COMPOSITIONS BASED THEREON
- C08G—MACROMOLECULAR COMPOUNDS OBTAINED OTHERWISE THAN BY REACTIONS ONLY INVOLVING UNSATURATED CARBON-TO-CARBON BONDS
- C08G75/00—Macromolecular compounds obtained by reactions forming a linkage containing sulfur with or without nitrogen, oxygen, or carbon in the main chain of the macromolecule
- C08G75/02—Polythioethers
-
- C—CHEMISTRY; METALLURGY
- C08—ORGANIC MACROMOLECULAR COMPOUNDS; THEIR PREPARATION OR CHEMICAL WORKING-UP; COMPOSITIONS BASED THEREON
- C08G—MACROMOLECULAR COMPOUNDS OBTAINED OTHERWISE THAN BY REACTIONS ONLY INVOLVING UNSATURATED CARBON-TO-CARBON BONDS
- C08G75/00—Macromolecular compounds obtained by reactions forming a linkage containing sulfur with or without nitrogen, oxygen, or carbon in the main chain of the macromolecule
- C08G75/02—Polythioethers
- C08G75/0204—Polyarylenethioethers
-
- C—CHEMISTRY; METALLURGY
- C08—ORGANIC MACROMOLECULAR COMPOUNDS; THEIR PREPARATION OR CHEMICAL WORKING-UP; COMPOSITIONS BASED THEREON
- C08G—MACROMOLECULAR COMPOUNDS OBTAINED OTHERWISE THAN BY REACTIONS ONLY INVOLVING UNSATURATED CARBON-TO-CARBON BONDS
- C08G75/00—Macromolecular compounds obtained by reactions forming a linkage containing sulfur with or without nitrogen, oxygen, or carbon in the main chain of the macromolecule
- C08G75/02—Polythioethers
- C08G75/0204—Polyarylenethioethers
- C08G75/0209—Polyarylenethioethers derived from monomers containing one aromatic ring
-
- C—CHEMISTRY; METALLURGY
- C08—ORGANIC MACROMOLECULAR COMPOUNDS; THEIR PREPARATION OR CHEMICAL WORKING-UP; COMPOSITIONS BASED THEREON
- C08K—Use of inorganic or non-macromolecular organic substances as compounding ingredients
- C08K3/00—Use of inorganic substances as compounding ingredients
- C08K3/18—Oxygen-containing compounds, e.g. metal carbonyls
- C08K3/20—Oxides; Hydroxides
- C08K3/22—Oxides; Hydroxides of metals
-
- C—CHEMISTRY; METALLURGY
- C08—ORGANIC MACROMOLECULAR COMPOUNDS; THEIR PREPARATION OR CHEMICAL WORKING-UP; COMPOSITIONS BASED THEREON
- C08L—COMPOSITIONS OF MACROMOLECULAR COMPOUNDS
- C08L81/00—Compositions of macromolecular compounds obtained by reactions forming in the main chain of the macromolecule a linkage containing sulfur with or without nitrogen, oxygen or carbon only; Compositions of polysulfones; Compositions of derivatives of such polymers
- C08L81/02—Polythioethers; Polythioether-ethers
-
- C—CHEMISTRY; METALLURGY
- C09—DYES; PAINTS; POLISHES; NATURAL RESINS; ADHESIVES; COMPOSITIONS NOT OTHERWISE PROVIDED FOR; APPLICATIONS OF MATERIALS NOT OTHERWISE PROVIDED FOR
- C09D—COATING COMPOSITIONS, e.g. PAINTS, VARNISHES OR LACQUERS; FILLING PASTES; CHEMICAL PAINT OR INK REMOVERS; INKS; CORRECTING FLUIDS; WOODSTAINS; PASTES OR SOLIDS FOR COLOURING OR PRINTING; USE OF MATERIALS THEREFOR
- C09D181/00—Coating compositions based on macromolecular compounds obtained by reactions forming in the main chain of the macromolecule a linkage containing sulfur, with or without nitrogen, oxygen, or carbon only; Coating compositions based on polysulfones; Coating compositions based on derivatives of such polymers
- C09D181/02—Polythioethers; Polythioether-ethers
-
- C—CHEMISTRY; METALLURGY
- C09—DYES; PAINTS; POLISHES; NATURAL RESINS; ADHESIVES; COMPOSITIONS NOT OTHERWISE PROVIDED FOR; APPLICATIONS OF MATERIALS NOT OTHERWISE PROVIDED FOR
- C09J—ADHESIVES; NON-MECHANICAL ASPECTS OF ADHESIVE PROCESSES IN GENERAL; ADHESIVE PROCESSES NOT PROVIDED FOR ELSEWHERE; USE OF MATERIALS AS ADHESIVES
- C09J181/00—Adhesives based on macromolecular compounds obtained by reactions forming in the main chain of the macromolecule a linkage containing sulfur, with or without nitrogen, oxygen, or carbon only; Adhesives based on polysulfones; Adhesives based on derivatives of such polymers
- C09J181/02—Polythioethers; Polythioether-ethers
-
- C—CHEMISTRY; METALLURGY
- C08—ORGANIC MACROMOLECULAR COMPOUNDS; THEIR PREPARATION OR CHEMICAL WORKING-UP; COMPOSITIONS BASED THEREON
- C08K—Use of inorganic or non-macromolecular organic substances as compounding ingredients
- C08K3/00—Use of inorganic substances as compounding ingredients
- C08K3/18—Oxygen-containing compounds, e.g. metal carbonyls
- C08K3/20—Oxides; Hydroxides
- C08K3/22—Oxides; Hydroxides of metals
- C08K2003/2248—Oxides; Hydroxides of metals of copper
-
- C—CHEMISTRY; METALLURGY
- C08—ORGANIC MACROMOLECULAR COMPOUNDS; THEIR PREPARATION OR CHEMICAL WORKING-UP; COMPOSITIONS BASED THEREON
- C08K—Use of inorganic or non-macromolecular organic substances as compounding ingredients
- C08K3/00—Use of inorganic substances as compounding ingredients
- C08K3/18—Oxygen-containing compounds, e.g. metal carbonyls
- C08K3/20—Oxides; Hydroxides
- C08K3/22—Oxides; Hydroxides of metals
- C08K2003/2251—Oxides; Hydroxides of metals of chromium
Definitions
- Patent Document 1 discloses a robot hand with tactile sensors that can reduce damage and malfunctions caused by contact of an object to be grasped with parts of the fingers other than the palm surface when using the robot hand with tactile sensors.
- end effectors Due to limitations on the weight that can be carried by a robot arm, there is a demand for such end effectors to have a reduced number of parts, be smaller, and be lighter. In addition, there is a demand for end effectors to be waterproof and water resistant so that they can be washed to prevent the spread of infectious diseases and for other hygienic purposes. Generally, end effectors are made of metal, are heavy, and have the problem of rusting when washed.
- End effectors generally have only one function: to grasp an object.
- the present disclosure aims to provide an end effector and robot arm that can contribute to more functions with a simpler configuration.
- the present disclosure relates to (1) An end effector for use in a robot, comprising: A body portion containing a resin; a circuit portion including a circuit formed integrally with the resin in the main body portion and contributing to a predetermined function; Equipped with End effector, It is.
- the circuit may have wiring formed in a predetermined pattern on the surface of the resin of the main body, and may contribute to the predetermined function based on the wiring itself.
- the circuit may have a substrate that is integrally molded with the resin of the main body, and wiring that is formed in a predetermined pattern on the substrate, and may contribute to the predetermined function based on the wiring itself.
- the functions include a first function of detecting that the main body portion has come into contact with a first object;
- the pattern corresponding to the first function may include a first pattern including at least one straight line connecting an input electrode and an output electrode formed integrally with the resin in the main body.
- the functions include a second function of detecting a height of a second object; the pattern corresponding to the second function includes a second pattern including a plurality of the first patterns; In the second pattern, one straight line included in each of the plurality of first patterns may be arranged along an extension direction of the main body portion.
- the first pattern may include a first straight line extending from the input electrode, a second straight line bent at 90 degrees from the first straight line, and a third straight line bent at a further 90 degrees from the second straight line and extending to the output electrode formed in parallel with the input electrode.
- the first pattern may include only a fourth straight line extending from the input electrode to the output electrode.
- the functions include a third function for detecting a magnitude of pressure generated when the end effector grasps a third object;
- the pattern corresponding to the third function may include a third pattern that functions as a strain gauge.
- the third pattern may be a pattern in which a straight line is folded back 180 degrees at one end, and the folded straight line is then folded back again 180 degrees at the other end, and the folded straight line is then repeatedly folded back 180 degrees at the other end.
- the functions include a fourth function of generating a magnetic field to transfer power to a fourth object;
- the pattern corresponding to the fourth function may include a spiral fourth pattern.
- the circuit section may have a sensor element mounted on the circuit and contributing to the predetermined function.
- the circuit section may have a control element that is implemented in the circuit and executes processes necessary to realize the predetermined function.
- the resin may include a thermoplastic resin.
- thermoplastic resin may include at least one selected from the group consisting of engineering plastics and super engineering plastics.
- thermoplastic resin may be a polyarylene sulfide resin.
- the resin may be formed by blending a metal oxide containing at least one of copper and chromium.
- the present disclosure relates to (17) A robot arm including the end effector according to any one of (1) to (16) above. It is.
- the present disclosure makes it possible to provide an end effector and robot arm that can contribute to more functions with a simpler configuration.
- FIG. 1 is a schematic diagram illustrating an appearance of a robot arm according to an embodiment of the present disclosure.
- FIG. 2 is a schematic diagram showing the appearance of an end effector of the robot arm of FIG. 1 .
- FIG. 2 is a block diagram showing a schematic configuration of the robot arm of FIG. 1 .
- 3 is a schematic diagram showing a first pattern of wiring of the first circuit of FIG. 2; 3 is a schematic diagram showing a second pattern of wiring of the second circuit of FIG. 2 .
- FIG. 3 is a schematic diagram showing a third pattern of wiring of the third circuit in FIG. 2 .
- FIG. 6B is a schematic diagram of each component shown in FIG. 6A viewed from the side;
- FIG. 4 is a schematic diagram showing a fourth pattern of wiring of the fourth circuit in FIG.
- FIG. 13 is a schematic diagram showing a first pattern of wiring of a first circuit according to a modified example of the present disclosure.
- FIG. 13 is a schematic diagram showing a second pattern of wiring of a second circuit according to a modified example of the present disclosure.
- 13 is a schematic diagram showing the appearance of an end effector according to a modified example of the present disclosure.
- FIG. 1 is a schematic diagram showing the appearance of a robot arm 1 according to one embodiment of the present disclosure.
- FIG. 2 is a schematic diagram showing the appearance of an end effector 10 of the robot arm 1 of FIG. 1.
- FIG. 3 is a block diagram showing a general configuration of the robot arm 1 of FIG. 1. The general configuration of the robot arm 1 including the end effector 10 will be mainly described with reference to FIGS. 1 to 3.
- the robot arm 1 has a housing 1a that constitutes the main body, and an end effector 10 that is attached to the housing 1a at the tip of the robot arm 1.
- the end of the end effector 10 opposite the part for gripping an object is attached to the housing 1a, so that the end effector 10 is supported by the housing 1a.
- the end effector 10 is driven while supported by the housing 1a, and grips the object.
- the end effector 10 is used in a robot.
- the end effector 10 functions as a part of a robot having a robot arm 1.
- robot includes, for example, an industrial robot, a nursing robot, a marine robot, a medical robot, and a mobile body such as a vehicle or a drone that moves by making autonomous decisions.
- industrial robot includes, for example, a collaborative robot that can work together with a worker in the same space, and other robots that work in isolation from the worker.
- the end effector 10 is configured as a robot hand or a robot gripper in such a robot.
- the end effector 10 has a main body portion 11 that contains resin, and a circuit portion 12 that includes a circuit that is formed integrally with the resin in the main body portion 11.
- the main body 11 constitutes the entire external shape of the end effector 10.
- the main body 11 has an attachment portion 11a that is attached to the housing 1a of the robot arm 1.
- the main body 11 has a pair of claws 11b that protrude from the end of the attachment portion 11a that is located on the opposite side to the housing 1a.
- the pair of claws 11b grasp an object, for example, by reducing the distance between them to be approximately the same as the width of the object.
- the entire main body 11 including the attachment portion 11a and the claws 11b is made of resin.
- thermoplastic resin includes, for example, a thermoplastic resin.
- Thermoplastic resin includes, for example, at least one selected from the group consisting of engineering plastics and super engineering plastics.
- the thermoplastic resin is, for example, a polyarylene sulfide resin. More specifically, the thermoplastic resin includes a polyarylene sulfide resin such as a polyphenylene sulfide resin.
- the robot arm 1 has an end effector 10 having a main body 11 and a circuit 12, as well as a memory 20, a drive 30, and a control unit 40.
- the memory 20, the drive 30, and the control unit 40 are housed in a housing 1a of the robot arm 1.
- the storage unit 20 includes, for example, a semiconductor memory, a magnetic memory, an optical memory, or any combination of these.
- the storage unit 20 functions, for example, as a main storage device, an auxiliary storage device, or a cache memory.
- the storage unit 20 stores information used in the operation of the robot arm 1 and information obtained by the operation of the robot arm 1.
- the storage unit 20 stores system programs, application programs, and various data acquired by any means such as communication.
- the drive unit 30 includes, for example, any drive mechanism for driving the end effector 10.
- the drive mechanism includes, for example, a plurality of gears and a motor for rotating the gears.
- the drive unit 30 drives the end effector 10 in accordance with a control signal from the control unit 40.
- the drive unit 30 drives the claw portion 11b of the main body portion 11 of the end effector 10 in accordance with a control signal from the control unit 40, for example, so that the claw portion 11b grips an object.
- the control unit 40 includes a microcontroller, a processor, a programmable circuit, a dedicated circuit, or any combination of these.
- the processor is a general-purpose processor such as a CPU or GPU, or a dedicated processor specialized for specific processing.
- CPU is an abbreviation for Central Processing Unit.
- GPU is an abbreviation for Graphics Processing Unit.
- An example of a programmable circuit is an FPGA.
- FPGA is an abbreviation for Field-Programmable Gate Array.
- An example of a dedicated circuit is an ASIC.
- ASIC Application Specific Integrated Circuit.
- the control unit 40 is communicatively connected to each component that constitutes the robot arm 1, and executes various processes related to the operation of the robot arm 1 while controlling each component.
- the circuit section 12 possessed by the end effector 10 contributes to a predetermined function.
- the "predetermined function" includes, for example, a first function, a second function, a third function, and a fourth function.
- the first function is a function of detecting that the main body section 11 has come into contact with a first object.
- the second function is a function of detecting the height of the second object.
- the third function is a function of detecting the magnitude of pressure generated when the end effector 10 grasps a third object.
- the fourth function is a function of generating a magnetic field to transmit power to the fourth object.
- the first object, second object, third object, and fourth object may be the same as each other, or may be different from each other.
- the circuit of the circuit unit 12 is formed, for example, by drawing directly on the surface of the resin that forms the claw portion 11b of the main body portion 11.
- wiring and electrodes are formed in each area of the surface of the resin that forms the claw portion 11b.
- the circuit of the circuit unit 12 is formed, for example, as a molded circuit using LDS, a type of MID.
- MID is an abbreviation for Molded Interconnect Device.
- LDS is an abbreviation for Laser Direct Structuring.
- the circuit of the circuit unit 12 is formed by plating by directly irradiating a laser onto the surface of the main body portion 11 as a molded product.
- the circuit of the circuit unit 12 has wiring formed in a predetermined pattern on the resin surface of the main body 11, and contributes to a predetermined function based on the wiring itself.
- the circuit of the circuit unit 12 includes a first circuit 121, a second circuit 122, a third circuit 123, and a fourth circuit 124.
- the first circuit 121 is formed, for example, on each of the outer surfaces of the pair of claw portions 11b in the separation direction D1 in which the pair of claw portions 11b are separated from each other.
- the outer surface of the claw portion 11b is a surface located on the dorsal side opposite the ventral side of the claw portion 11b, which is the side on which the claw portion 11b grips an object.
- the first circuit 121 is formed on the entire outer surface of the claw portion 11b, except for the tip portion in the extension direction D2 of the main body portion 11 that is perpendicular to the separation direction D1.
- the first circuit 121 contributes to a first function.
- the second circuit 122 is formed, for example, on each of the inner surfaces of the pair of claw portions 11b in the separation direction D1.
- the inner surface of the claw portion 11b is a surface located on the ventral side of the claw portion 11b, which is the side of the claw portion 11b that grips an object.
- the second circuit 122 is located on the inner surface of the claw portion 11b, in the center of the extension direction D2 of the main body portion 11. The second circuit 122 contributes to a second function.
- the third circuit 123 is formed, for example, on each of the inner surfaces of the pair of claw portions 11b in the separation direction D1.
- the third circuit 123 is located on the inner surface of the claw portion 11b at the tip end of the body portion 11 in the extension direction D2.
- the third circuit 123 contributes to a third function.
- the fourth circuit 124 is formed, for example, on each of the outer surfaces of the pair of claws 11b in the separation direction D1.
- the fourth circuit 124 is located on the outer surface of the claws 11b at the tip end of the body 11 in the extension direction D2.
- the fourth circuit 124 contributes to a fourth function.
- FIG. 4 is a schematic diagram showing the first pattern P1 of the wiring W1 of the first circuit 121 in FIG. 2.
- the first region R1 in FIG. 2 is enlarged to show only the first circuit 121 of the circuit section 12.
- the first circuit 121 has an input electrode E1 and an output electrode E2 formed on the resin surface of the claw portion 11b.
- the input electrode E1 and the output electrode E2 are formed in parallel to each other.
- the first circuit 121 has wiring W1 formed in a first pattern P1 on the resin surface of the claw portion 11b, and contributes to a first function based on the wiring W1 itself.
- the first pattern P1 corresponding to the first function includes at least one straight line connecting the input electrode E1 and the output electrode E2 formed integrally with the resin in the main body portion 11.
- the first pattern P1 includes three straight lines.
- the first pattern P1 includes a first straight line L1 extending from the input electrode E1, a second straight line L2 bending at 90° from the first straight line L1, and a third straight line L3 bending at 90° from the second straight line L2 and extending to the output electrode E2.
- the first pattern P1 extends in an elongated manner along the extension direction D2 of the main body portion 11 across substantially the entire extension area of the claw portion 11b.
- the first pattern P1 corresponds to the shape of a "C" rotated 90° clockwise.
- FIG. 5 is a schematic diagram showing the second pattern P2 of the wiring W2 of the second circuit 122 in FIG. 2.
- the second region R2 in FIG. 2 is enlarged to show only the second circuit 122 of the circuit section 12.
- the second circuit 122 has four input electrodes E11, E12, E13, and E14 formed on the resin surface of the claw portion 11b.
- the second circuit 122 has four output electrodes E21, E22, E23, and E24 formed on the resin surface of the claw portion 11b.
- the input electrodes E11, E12, E13, and E14 and the output electrodes E21, E22, E23, and E24 are formed in parallel with each other.
- the second circuit 122 has wiring W2 formed in a second pattern P2 on the resin surface of the claw portion 11b, and contributes to a second function based on the wiring W2 itself.
- the second pattern P2 corresponding to the second function includes a plurality of first patterns P1.
- one straight line included in each of the plurality of first patterns P1 is arranged along the extension direction D2 of the main body portion 11. More specifically, a second straight line L2 included in each of the plurality of first patterns P1 is arranged along the extension direction D2 of the main body portion 11.
- the input electrode E11 and the output electrode E21 are connected by the first pattern P11.
- the input electrode E12 and the output electrode E22 are connected by the first pattern P12.
- the input electrode E13 and the output electrode E23 are connected by the first pattern P13.
- the input electrode E14 and the output electrode E24 are connected by the first pattern P14.
- the second straight line L21 of the first pattern P11, the second straight line L22 of the first pattern P12, the second straight line L23 of the first pattern P13, and the second straight line L24 of the first pattern P14 are arranged along the extension direction D2 of the main body 11.
- the first pattern P11 is located at the innermost position
- the first patterns P12, P13, and P14 are located on the outer sides of the first pattern P11, in that order.
- the second straight lines L21, L22, L23, and L24 are arranged discretely in order from the base of the claw portion 11b on the mounting portion 11a side to the tip along the extension direction D2 of the main body 11.
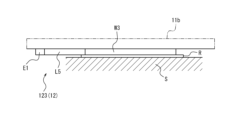
- FIG. 6A is a schematic diagram showing the third pattern P3 of the wiring W3 of the third circuit 123 in FIG. 2.
- the third region R3 in FIG. 2 is enlarged to show the third circuit 123 of the circuit unit 12 as well as the tip of the claw portion 11b.
- FIG. 6A additionally shows a resistor R and a third object S, which are not shown in FIG. 2.
- the third circuit 123 has an input electrode E1 and an output electrode E2 formed on the resin surface of the claw portion 11b.
- the input electrode E1 and the output electrode E2 are formed in parallel to each other.
- the third circuit 123 has wiring W3 formed in a third pattern P3 on the resin surface of the claw portion 11b, and contributes to a third function based on the wiring W3 itself.
- the third pattern P3 corresponding to the third function functions as a strain gauge. For example, the third pattern P3 repeats folding a straight line 180° at one end, and folding the folded straight line again 180° at the other end.
- the third circuit 123 has two gauge leads L5 that connect one end and the other end of the wiring W3 formed by the third pattern P3 to the input electrode E1 and the output electrode E2, respectively.
- the gauge leads L5 are also formed, for example, on the resin surface of the claw portion 11b, like the input electrode E1, the output electrode E2, and the wiring W3.
- FIG. 6B is a schematic diagram of each component shown in FIG. 6A when viewed from the side.
- a resistor R is attached to the wire W3 in the third circuit 123 by any method, such as gluing, on the surface opposite the claw portion 11b of the wire W3. Therefore, when the end effector 10 grasps the third object S, the third object S comes into direct contact with the resistor R, not with the wire W3.
- FIG. 7 is a schematic diagram showing the fourth pattern P4 of the wiring W4 of the fourth circuit 124 in FIG. 2.
- the fourth region R4 in FIG. 2 is enlarged to show only the fourth circuit 124 of the circuit section 12.
- the fourth circuit 124 has an input electrode E1 and an output electrode E2 formed on the resin surface of the claw portion 11b.
- the input electrode E1 and the output electrode E2 are formed in positions significantly different from each other.
- the fourth circuit 124 has a wiring W4 formed in a fourth pattern P4 on the resin surface of the claw portion 11b, and contributes to a fourth function based on the wiring W4 itself.
- the fourth pattern P4 corresponding to the fourth function is spiral.
- the wiring W4 is configured as a spiral coil.
- the input electrode E1 is directly connected to one end of the wire W4 on the surface of the resin of the claw portion 11b.
- the output electrode E2 is indirectly connected to the other end of the wire W4 via a connection line, shown by a dotted line, that is disposed inside the resin of the claw portion 11b.
- the resin used in one embodiment is preferably a thermoplastic resin.
- the thermoplastic resin is not particularly limited, but examples thereof include polyolefin resins such as polypropylene, polyethylene, and polybutene; polyester resins such as polyethylene terephthalate and polybutylene terephthalate; polyamide resins such as nylon-6 and nylon 6,6, or aromatic polyamide resins; thermoplastic polyimide resins; polyamideimide resins; polystyrene resins such as polystyrene, syndiotactic polystyrene, acrylonitrile-styrene copolymer resin, and acrylonitrile-butadiene-styrene copolymer resin; polyarylene sulfide resins such as polyphenylene sulfide; polyphenylene ether resins; polyurethane resins; polylactic acid; polyether ether ketone resins; polyetherimide resins; polyketone resins; polyarylate resins such as
- thermoplastic resins used in one embodiment are preferably so-called engineering plastics or super engineering plastics that have excellent heat resistance and mechanical properties, such as thermoplastic polyimide resins, polyamideimide resins, polyarylene sulfide resins, polyphenylene ether resins, polyether ether ketone resins, polyetherimide resins, polyketone resins, polyarylate resins, and liquid crystal polyester resins.
- engineering plastics or super engineering plastics that have excellent heat resistance and mechanical properties, such as thermoplastic polyimide resins, polyamideimide resins, polyarylene sulfide resins, polyphenylene ether resins, polyether ether ketone resins, polyetherimide resins, polyketone resins, polyarylate resins, and liquid crystal polyester resins.
- polyarylene sulfide resins are more preferable, and among polyarylene sulfide resins (hereinafter also referred to as "PAS resins”), polyphenylene sulfide resins (hereinafter also referred to as “PPS resins”) are particularly preferable.
- PAS resins polyarylene sulfide resins
- PPS resins polyphenylene sulfide resins
- the above resins may be used alone or in the form of a polymer alloy in which a plurality of the above resins are mixed.
- the resin according to one embodiment may contain a filler.
- the resin containing a filler may contain the filler described below and the above resin, and may be in the form of a composition containing any of the additive components described below (colorant, antistatic agent, antioxidant, heat stabilizer, UV stabilizer, UV absorber, foaming agent, flame retardant, flame retardant assistant, rust inhibitor, coupling agent, silane coupling agent, thermoplastic elastomer, or synthetic resin) as necessary.
- Polyarylene sulfide resin has a resin structure in which a repeating unit is a structure in which an aromatic ring and a sulfur atom are bonded, and specifically, it is a resin in which the repeating unit is a structural portion represented by the following general formula (1) and, if necessary, a trifunctional structural portion represented by the following general formula (2).
- R 1 and R 2 each independently represent a hydrogen atom, an alkyl group having 1 to 4 carbon atoms, a nitro group, an amino group, a phenyl group, a methoxy group, or an ethoxy group.
- the trifunctional structural portion represented by formula (2) is preferably present in an amount of 0.001 to 3 mol %, particularly preferably 0.01 to 1 mol %, based on the total number of moles of the trifunctional structural portion and the other structural portions.
- the structural portion represented by the above general formula (1) are preferably hydrogen atoms from the viewpoint of the mechanical strength of the PAS resin.
- examples of the structural portion include those bonded at the para position represented by the following formula (3) and those bonded at the meta position represented by the following formula (4).
- a structure in which the bond of the sulfur atom to the aromatic ring in the repeating unit is bonded at the para position represented by the above general formula (3) is particularly preferred in terms of the heat resistance and crystallinity of the PAS resin.
- the PAS resin may contain not only the structural moieties represented by the above general formula (1) or (2), but also the structural moieties represented by the following structural formulae (5) to (8), in an amount of 30 mol % or less of the total of the structural moieties represented by the above general formula (1) and general formula (2).
- the structural moieties represented by the general formulae (5) to (8) are preferably 10 mol % or less in terms of heat resistance and mechanical strength of the PAS resin.
- the bonding mode thereof may be either a random copolymer or a block copolymer.
- the above PAS resin may have naphthyl sulfide bonds in its molecular structure, but this is preferably 3 mol % or less, and more preferably 1 mol % or less, relative to the total number of moles including other structural parts.
- the physical properties of the PAS resin are not particularly limited as long as they do not impair the effects of one embodiment, but are as follows:
- the melt viscosity of the PAS resin is not particularly limited, but in order to obtain a good balance between fluidity and mechanical strength, the melt viscosity (V6) measured at 300°C is preferably in the range of 2 Pa ⁇ s or more, preferably in the range of 1000 Pa ⁇ s or less, more preferably in the range of 500 Pa ⁇ s or less, and even more preferably in the range of 200 Pa ⁇ s or less.
- the non-Newtonian index of the PAS resin is not particularly limited, but is preferably in the range of 0.90 or more to 2.00 or less.
- the non-Newtonian index is preferably in the range of 0.90 or more, more preferably in the range of 0.95 or more to preferably in the range of 1.50 or less, more preferably in the range of 1.20 or less.
- Such a polyarylene sulfide resin is excellent in mechanical properties, fluidity, and abrasion resistance.
- SR is the shear rate (sec -1 )
- SS is the shear stress (dyne/ cm2 )
- K is a constant.
- the resin used in one embodiment is blended with a metal oxide containing at least one of copper and chromium for the purpose of forming a molded circuit using LDS.
- the metal oxide generates heat when irradiated with a laser in the resulting molded product, melting the resin and roughening the surface of the molded product, and is activated by laser irradiation to selectively form a plating layer.
- the metal oxide contains at least one of copper and chromium.
- the metal oxide may further contain other metals such as iron, aluminum, gallium, boron, molybdenum, tungsten, and selenium.
- the metal oxide include, but are not limited to, CuFe0.5B0.5O2.5 , CuAl0.5B0.5O2.5 , CuGa0.5B0.5O2.5 , CuB2O4 , CuB0.7O2 , CuMo0.7O3 , CuMo0.5O2.5 , CuMoO4 , CuWO4 , CuSeO4 , and CuCr2O4 .
- the metal oxide is preferably CuCr2O4 , CuFe0.5B0.5O2.5 , or CuAl0.5B0.5O2.5 , and more preferably CuCr2O4 or CuFe0.5B0.5O2.5 .
- These metal oxides may be used alone or in combination of two or more.
- the average particle size of the metal oxide is preferably in the range of 0.01 ⁇ m or more, more preferably 0.05 ⁇ m or more, to preferably 50 ⁇ m or less, more preferably 30 ⁇ m or less.
- the average particle size of the metal oxide is 0.01 ⁇ m or more, efficient and stable production is possible, which is preferable.
- the average particle size of the metal oxide is 50 ⁇ m or less, it is preferable because material strength can be maintained.
- "average particle size of the metal oxide” means the number average particle size, and the value measured by electron microscopy photography is adopted. Specifically, the particle sizes of 100 arbitrarily selected metal oxide particles in one field of view of the electron microscope are measured, and the average value is calculated.
- the Mohs hardness of the metal oxide is preferably in the range of 4.0 or more, preferably 6.5 or less, more preferably 6.0 or less.
- the amount of the metal oxide is preferably 15 parts by mass or more, more preferably 20 parts by mass or more, and even more preferably 25 parts by mass or more, and preferably 90 parts by mass or less, relative to 100 parts by mass of the PAS resin.
- the amount of the metal oxide is 15 parts by mass or more relative to 100 parts by mass of the PAS resin, it is preferable from the viewpoints that the surface roughening and activation of the metal oxide due to laser irradiation can be highly generated in the obtained molded product, and that plating properties are excellent.
- the amount of the metal oxide is 90 parts by mass or less relative to 100 parts by mass of the PAS resin, it is preferable because the material strength can be maintained.
- fillers may be any known or commonly used material that does not impair the effect of one embodiment, and examples of such fillers include fillers of various shapes, such as fibrous fillers and non-fibrous fillers such as granular or plate-shaped fillers.
- fibrous fillers such as glass fiber, carbon fiber, silane glass fiber, ceramic fiber, aramid fiber, metal fiber, potassium titanate, silicon carbide, calcium silicate, wollastonite, and natural fibers
- non-fibrous fillers such as glass beads, glass flakes, barium sulfate, clay, pyrophyllite, bentonite, sericite, mica, talc, kerolite, pimelite, pyrophyllite, hydrotalcite, kaolinite, attapulgite, ferrite, calcium silicate, calcium carbonate, glass beads, zeolite, milled fiber, and calcium sulfate may also be used.
- the amount of filler is not particularly limited as long as it does not impair the effect of the embodiment.
- the amount of filler to be mixed is, for example, preferably 1 part by mass or more, more preferably 10 parts by mass or more, and preferably 600 parts by mass or less, more preferably 200 parts by mass or less, per 100 parts by mass of resin. This range is preferable because the resin exhibits good mechanical strength and moldability.
- the resin used in one embodiment can be blended with a silane coupling agent as an optional component, if necessary.
- the silane coupling agent is not particularly limited as long as it does not impair the effects of one embodiment, but preferred examples include silane coupling agents having a functional group that reacts with a carboxy group, such as an epoxy group, an isocyanato group, an amino group, or a hydroxyl group.
- silane coupling agents include epoxy group-containing alkoxysilane compounds such as ⁇ -glycidoxypropyltrimethoxysilane, ⁇ -glycidoxypropyltriethoxysilane, and ⁇ -(3,4-epoxycyclohexyl)ethyltrimethoxysilane; isocyanato group-containing alkoxysilane compounds such as ⁇ -isocyanatopropyltrimethoxysilane, ⁇ -isocyanatopropyltriethoxysilane, ⁇ -isocyanatopropylmethyldimethoxysilane, ⁇ -isocyanatopropylmethyldiethoxysilane, ⁇ -isocyanatopropylethyldimethoxysilane, ⁇ -isocyanatopropylethyldiethoxysilane, and ⁇ -isocyanatopropyltrichlorosilane; amino group-containing alkoxysilane compounds such
- the silane coupling agent is not an essential component, but if it is used, the amount of the silane coupling agent is not particularly limited as long as it does not impair the effect of the embodiment, but is preferably in the range of 0.01 parts by mass or more, more preferably 0.1 parts by mass or more, to preferably 10 parts by mass or less, more preferably 5 parts by mass or less, relative to 100 parts by mass of the resin. In such a range, the resin has good corona resistance and moldability, especially releasability, and the molded product exhibits excellent adhesion to the epoxy resin while also improving mechanical strength, which is preferable.
- the resin used in one embodiment may contain a thermoplastic elastomer as an optional component, if necessary.
- thermoplastic elastomers include polyolefin-based elastomers, fluorine-based elastomers, and silicone-based elastomers, of which polyolefin-based elastomers are preferred.
- their amount is not particularly limited as long as it does not impair the effects of one embodiment, but is preferably in the range of 0.01 parts by mass or more, more preferably 0.1 parts by mass or more, to preferably 10 parts by mass or less, more preferably 5 parts by mass or less, per 100 parts by mass of resin (A). This range is preferable because it improves the impact resistance of the resulting resin.
- the polyolefin-based elastomer may be a homopolymer of an ⁇ -olefin, a copolymer of two or more ⁇ -olefins, or a copolymer of one or more ⁇ -olefins and a vinyl polymerizable compound having a functional group.
- examples of the ⁇ -olefin include ⁇ -olefins having 2 or more to 8 or less carbon atoms, such as ethylene, propylene, and 1-butene.
- Examples of the vinyl polymerizable compound having the functional group include one or more of vinyl acetate; ⁇ , ⁇ -unsaturated carboxylic acids such as (meth)acrylic acid; alkyl esters of ⁇ , ⁇ -unsaturated carboxylic acids such as methyl acrylate, ethyl acrylate, and butyl acrylate; metal salts of ⁇ , ⁇ -unsaturated carboxylic acids such as ionomers (metals include alkali metals such as sodium, alkaline earth metals such as calcium, and zinc); glycidyl esters of ⁇ , ⁇ -unsaturated carboxylic acids such as glycidyl methacrylate; ⁇ , ⁇ -unsaturated dicarboxylic acids such as maleic acid, fumaric acid, and itaconic acid; and derivatives of the above ⁇ , ⁇ -unsaturated dicarboxylic acids (monoesters, diesters, and acid anhydrides).
- the resin used in one embodiment may further contain synthetic resins such as polyester resin, polyamide resin, polyimide resin, polyetherimide resin, polycarbonate resin, polyphenylene ether resin, polysulfone resin, polyethersulfone resin, polyetheretherketone resin, polyetherketone resin, polyarylene resin, polyethylene resin, polypropylene resin, polytetrafluoroethylene resin, polydifluoroethylene resin, polystyrene resin, ABS resin, phenolic resin, urethane resin, and liquid crystal polymer (hereinafter simply referred to as synthetic resin) as optional components depending on the application.
- synthetic resins such as polyester resin, polyamide resin, polyimide resin, polyetherimide resin, polycarbonate resin, polyphenylene ether resin, polysulfone resin, polyethersulfone resin, polyetheretherketone resin, polyetherketone resin, polyarylene resin, polyethylene resin, polypropylene resin, polytetrafluoroethylene resin, polydifluoroethylene resin,
- the ratio of the synthetic resins to be added is not particularly limited as long as it does not impair the effects of one embodiment, and also varies depending on each purpose and cannot be generally defined, but the ratio of the synthetic resin to be added to the resin according to one embodiment is, for example, in the range of 5 parts by mass or more and 15 parts by mass or less per 100 parts by mass of resin.
- the ratio of resin (A) to the total of resin (A) and synthetic resin is preferably in the range of (100/115) or more, and more preferably in the range of (100/105) or more, based on mass.
- the resin used in one embodiment may contain other known and commonly used additives as optional components, such as colorants, antistatic agents, antioxidants, heat stabilizers, UV stabilizers, UV absorbers, foaming agents, flame retardants, flame retardant assistants, rust inhibitors, and coupling agents, as necessary.
- additives are not essential components, and may be used in an amount, for example, preferably 0.01 parts by mass or more and preferably 1000 parts by mass or less per 100 parts by mass of resin, adjusted appropriately according to the purpose and application so as not to impair the effect of one embodiment.
- the resin used in one embodiment is a blend of each essential component and, if necessary, other optional components.
- the method for producing the resin used in one embodiment is not particularly limited, but includes a method in which the essential components and, if necessary, the optional components are blended and melt-kneaded, or, more specifically, a method in which, if necessary, the components are dry-mixed uniformly in a tumbler or Henschel mixer, and then the mixture is fed into a twin-screw extruder and melt-kneaded.
- the melt kneading can be carried out by heating the resin to a temperature range in which the resin temperature is equal to or higher than the melting point of the resin, preferably equal to or higher than the melting point + 10°C, more preferably equal to or higher than the melting point + 10°C, even more preferably equal to or higher than the melting point + 20°C, preferably equal to or lower than the melting point + 100°C, more preferably equal to or lower than the melting point + 50°C.
- the melt kneader is preferably a twin-screw kneading extruder from the viewpoint of dispersibility and productivity.
- the melt kneader is preferably a twin-screw kneading extruder from the viewpoint of dispersibility and productivity.
- the components may be added and mixed simultaneously or in portions to the melt kneader.
- the position of the side feeder is preferably such that the ratio of the distance from the extruder resin input section (top feeder) to the side feeder to the total screw length of the twin-screw kneading extruder is 0.1 or more, and more preferably 0.3 or more. This ratio is preferably 0.9 or less, and more preferably 0.7 or less.
- the resin according to one embodiment obtained by melt kneading in this manner is a molten mixture containing the above essential components, optional components added as necessary, and components derived therefrom.
- the molded product is made by molding a resin.
- the manufacturing method of the molded product in one embodiment includes a step of melt molding the resin. This is described in detail below.
- the resin used in one embodiment is subjected to injection molding.
- the resin is melted in an injection molding machine at a temperature range above the melting point of the resin, preferably above the melting point + 10°C, more preferably from the melting point + 10°C to the melting point + 100°C, and even more preferably from the melting point + 20°C to the melting point + 50°C, after which the resin is injected into a mold from a resin outlet and molded.
- the mold temperature may be set to a known temperature range, for example, room temperature (23°C) to 300°C, preferably 120 to 180°C.
- the end effector 10 can contribute to more functions with a simpler configuration.
- the end effector 10 has a circuit section 12 that includes a circuit formed integrally with resin in the main body section 11 and contributes to a predetermined function.
- the end effector 10 is capable of contributing not only to the basic function of grasping an object, but also to the various functions described above.
- the end effector 10 does not need to separately arrange, for example, a sheet or film for a sensor and a substrate that forms an electrical circuit, as in conventional technology.
- the end effector 10 does not need to separately provide a joint or bonding section for the sheet, film, substrate, etc.
- the end effector 10 can be made smaller and lighter, with fewer parts, and can satisfy the weight capacity limit of the robot arm 1.
- the end effector 10 also allows for greater freedom in its shape design.
- the end effector 10 has improved waterproofing and water resistance because the main body 11 contains resin, and can be washed to prevent the spread of infectious diseases and for other hygienic purposes.
- the end effector 10 is light and rust-resistant when washed.
- the circuit of the circuit section 12 has wiring formed in a predetermined pattern on the resin surface of the main body section 11, and contributes to a predetermined function based on the wiring itself.
- the end effector 10 does not require a shape and space to accommodate a wired harness and a board on which a circuit is formed, and it is possible to simplify its configuration while avoiding a complex shape.
- the end effector 10 tends to become electrically charged because the main body 11 contains resin, but even in such cases, the charge can be easily removed by the plated wiring in the metal circuit formed on the surface.
- the end effector 10 can effectively remove static electricity due to the shape of the wiring path drawn directly on its surface.
- the end effector 10 can contribute to the first function by the first pattern P1 including at least one straight line connecting the input electrode E1 and the output electrode E2. More specifically, when the first object comes into contact with the wiring W1 formed as at least one straight line connecting the input electrode E1 and the output electrode E2, a current leak occurs at the contact point, and the resistance of the wiring W1 changes. This causes a change in voltage between the input electrode E1 and the output electrode E2. For example, the control unit 40 of the robot arm 1 detects this voltage change and determines that the main body 11 of the end effector 10 has come into contact with the first object. Therefore, the end effector 10 contributes to the first function by outputting this voltage change as information to the control unit 40 of the robot arm 1.
- the robot arm 1 can stop the movement of the end effector 10 when the end effector 10 comes into contact with the first object through contact detection by the control unit 40, and prevent the end effector 10 from moving further toward the first object. Therefore, the robot arm 1 can prevent the end effector 10 itself from breaking down or the first object from being damaged due to a violent collision between the end effector 10 and the first object. The end effector 10 can improve the safety of the operation of the robot arm 1.
- the end effector 10 is able to contribute to the second function by arranging one straight line included in each of the multiple first patterns P1 in the second pattern P2 along the extension direction D2 of the main body 11. More specifically, according to the same principle regarding contact detection as described above, the control unit 40 of the robot arm 1 can determine in which of the first patterns P11, P12, P13, and P14 the claw portion 11b of the end effector 10 is in contact with the second object.
- the control unit 40 can therefore measure the distance from the tip of the claw portion 11b to the upper end of the contact point with the second object in a height direction parallel to the extension direction D2 within a predetermined numerical range. At this time, the control unit 40 may use, for example, the distance from the tip of the claw portion 11b to each of the second straight lines L21, L22, L23, and L24 as information. Such information may be stored in advance in the memory unit 20, for example.
- the control unit 40 can determine the above-mentioned predetermined numerical range based on the range between the second straight line L23 and the second straight line L24. For example, when the control unit 40 determines that the claw portion 11b is in contact with the second object in the first pattern P14 and the first pattern P13, the control unit 40 can determine the above-mentioned predetermined numerical range based on the range between the second straight line L22 and the second straight line L23.
- the control unit 40 determines that the claw portion 11b is in contact with the second object in the first pattern P14, the first pattern P13, and the first pattern P12
- the control unit 40 can determine the above-mentioned predetermined numerical range based on the range between the second straight line L21 and the second straight line L22.
- the control unit 40 determines that the claw portion 11b is in contact with the second object in all the first patterns P1
- the control unit 40 can determine the above-mentioned predetermined numerical range based on the range above the second straight line L21.
- control unit 40 can obtain information on the current height position of the tip of the claw portion 11b measured from a reference plane such as the ground or floor surface using any method, it can calculate the height from the reference plane to the top of the contact point with the second object as a numerical range.
- control unit 40 can measure the water level or the height of the top surface of the contents contained in the container.
- the control unit 40 controls the operation of the end effector 10 via the drive unit 30 so that the tip of the claw portion 11b of the end effector 10 contacts the bottom surface of the container.
- the control unit 40 aligns the tip position of the claw portion 11b of the end effector 10 with the bottom surface.
- the control unit 40 determines with which of the first patterns P11, P12, P13, and P14 the contents are in contact. Based on the determination result, the control unit 40 can measure the water level or the height of the top surface of the contents within a predetermined numerical range.
- the first pattern P1 includes a first straight line L1 extending from the input electrode E1, a second straight line L2 bending at 90° from the first straight line L1, and a third straight line L3 bending at 90° from the second straight line L2 and extending to the output electrode E2 formed in parallel with the input electrode E1.
- this first pattern P1 makes it easier for the wiring W1 of the claw portion 11b to come into contact with the first object. For example, as shown in FIG. 2, this effect becomes more pronounced when the wiring W1 is formed over the entire outer surface of the claw portion 11b except for the tip in the extension direction D2.
- the second pattern P2 including a plurality of first patterns P1.
- the end effector 10 can contribute to the third function by the third pattern P3 functioning as a strain gauge. More specifically, the third pattern P3 is a brush-like pattern in which a straight line is folded back 180° at one end, and the folded straight line is folded back 180° at the other end.
- the third pattern P3 is a brush-like pattern in which a straight line is folded back 180° at one end, and the folded straight line is folded back 180° at the other end.
- the third object S contacts the wiring W3 formed by such a third pattern P3 through the resistor R
- the amount of strain in the wiring W3 changes depending on the pressure at the contact point.
- the resistance of the wiring W3 also changes. This causes a change in voltage between the input electrode E1 and the output electrode E2.
- the control unit 40 of the robot arm 1 can calculate the pressure applied to the wiring W3 by measuring the amount of change in such voltage change.
- the control unit 40 may use, for example, data that associates the pressure generated when the end effector 10 grasps the third object S with
- the robot arm 1 can measure the pressure applied to the tip of the claw portion 11b when gripping the third object S using the third circuit 123 of the end effector 10. By detecting the magnitude of the pressure applied to the tip of the claw portion 11b, the robot arm 1 can appropriately adjust the load applied to the third object S when gripping the third object S. When gripping the third object S, the robot arm 1 can prevent a large load from being applied to the third object S, thereby preventing damage to the third object S and failure of the end effector 10 itself.
- the end effector 10 can contribute to a fourth function because the fourth pattern P4 is spiral.
- the wiring W4 formed by the spiral fourth pattern P4 can function as a coil. Therefore, when a current flows through the wiring W4, a magnetic field is generated, and it becomes possible to transmit power to a fourth object close to the tip of the claw portion 11b on which the wiring W4 is formed, for example, by the principle of electromagnetic induction.
- the end effector 10 can also be used for contactless charging of the fourth object.
- the resin contains a thermoplastic resin, and the thermoplastic resin is a polyarylene sulfide resin, which allows the end effector 10 to have improved waterproof and water resistance.
- the end effector 10 can also have improved chemical resistance and heat resistance. This allows the end effector 10 to be used in chemicals and to grip high-temperature materials.
- the end effector 10 is made of resin containing at least one of copper and chromium, which makes it easy to form molded circuits using LDS.
- the end effector 10 generates heat when irradiated with a laser due to the metal oxide containing at least one of copper and chromium, and can provide functions such as melting the resin and roughening its surface, and being activated by laser irradiation to selectively form a plating layer.
- the shape, pattern, size, arrangement, orientation, type, and number of each of the above-mentioned components are not limited to the above description and the contents illustrated in the drawings.
- the shape, pattern, size, arrangement, orientation, type, and number of each of the components may be configured arbitrarily as long as the function can be realized.
- Each of the components of the end effector 10 and robot arm 1 illustrated is a functional concept, and the specific form of each component is not limited to that illustrated.
- the first function, the second function, the third function, and the fourth function are exemplified as the predetermined function, but the type and number of functions are not limited to these.
- the predetermined function may include only a portion of the first function, the second function, the third function, and the fourth function.
- the predetermined function may include at least one other type of function instead of or in addition to at least a portion of the first function, the second function, the third function, and the fourth function.
- the circuit of the circuit unit 12 has wiring formed in a predetermined pattern on the surface of the resin of the main body unit 11, and is described as contributing to a predetermined function based on the wiring itself, but this is not limited to the above.
- the circuit of the circuit unit 12 may have a substrate that is integrally molded with the resin of the main body unit 11, and wiring formed in a predetermined pattern on the substrate, and may contribute to a predetermined function based on the wiring itself.
- the circuit of the circuit section 12 may be configured based on a substrate that is molded integrally with resin by insert molding, for example.
- the wiring and electrodes may be formed on the substrate.
- the circuit of the circuit section 12 may be configured as a molded circuit using an IME, for example, which is one of the MIDs. "IME" is an abbreviation for In-Mold Electronics.
- the circuit of the circuit section 12 may be formed by inserting a flexible substrate or the like during injection molding. In this way, the end effector 10 becomes an integrated molded product in which the substrate is molded integrally with resin and contributes to a specified function.
- the first pattern P1 is described as including three straight lines: a first straight line L1, a second straight line L2, and a third straight line L3, but is not limited to this.
- the first pattern P1 may be any other pattern that can contribute to the first function.
- FIG. 8 is a schematic diagram showing the first pattern P1 of the wiring W1 of the first circuit 121 according to a modified example of the present disclosure.
- the first region R1 of FIG. 2 is enlarged to show only the first circuit 121 of the circuit portion 12.
- the first pattern P1 may include only a fourth straight line L4 extending from the input electrode E1 to the output electrode E2.
- the input electrode E1 and the output electrode E2 do not have to be formed in parallel with each other, and may be formed on one end side and the other end side of the fourth straight line L4, respectively.
- the second pattern P2 is described as including four first patterns P11, P12, P13, and P14, but is not limited to this.
- the second pattern P2 may be any other pattern that can contribute to the second function.
- the second pattern P2 may include more first patterns P1 and be formed at finer intervals along the extension direction D2. This enables the end effector 10 to further narrow the above-mentioned predetermined numerical range for height measurement and improve the resolution.
- FIG. 9 is a schematic diagram showing the second pattern P2 of the wiring W2 of the second circuit 122 according to a modified example of the present disclosure.
- the second region R2 of FIG. 2 is enlarged to show only the second circuit 122 of the circuit portion 12.
- the second pattern P2 may be configured as shown in FIG. 9 to match the first pattern P1 shown in FIG. 8.
- one fourth straight line L4 included in each of the multiple first patterns P1 may be arranged along the extension direction D2 of the main body portion 11.
- the fourth straight line L41 of the first pattern P11, the fourth straight line L42 of the first pattern P12, the fourth straight line L43 of the first pattern P13, and the fourth straight line L44 of the first pattern P14 are arranged along the extension direction D2 of the main body 11.
- the first pattern P11 is located on the opposite side to the tip of the claw portion 11b, and the first patterns P12, P13, and P14 are located closer to the tip of the claw portion 11b in this order.
- the fourth straight lines L41, L42, L43, and L44 are arranged discretely in order from the base of the claw portion 11b on the mounting portion 11a side toward the tip along the extension direction D2 of the main body 11.
- the second pattern P2 has been described as contributing to the second function of detecting the height of the second object, but this is not limited to the above.
- the second pattern P2 may contribute to the function of detecting the position of the second object along the horizontal direction by the robot arm 1 moving the end effector 10 in the horizontal direction instead of the height direction.
- the third pattern P3 is described as a straight line that is folded 180 degrees at one end and then folded again 180 degrees at the other end, but is not limited to this.
- the third pattern P3 may be any other pattern that can contribute to the third function.
- the fourth pattern P4 is described as being spiral, but is not limited to this.
- the fourth pattern P4 may be any other pattern that can contribute to the fourth function.
- the circuit of the circuit unit 12 has been described as contributing to a predetermined function based on the wiring itself, but this is not limited to the above.
- the circuit unit 12 may have a sensor element that is mounted on the circuit of the circuit unit 12 by soldering or the like and contributes to the predetermined function.
- the "sensor element” may include, for example, a microphone, a proximity sensor, a vibration sensor, a PH sensor, a LiDAR (Light Detection And Ranging) sensor, and an imaging element.
- the end effector 10 can contribute to even more functions.
- the circuit unit 12 may have a control element that is mounted on the circuit of the circuit unit 12 by soldering or the like and executes the processes required to realize a predetermined function.
- the "control element” may include, for example, a microcontroller, a processor, a programmable circuit, a dedicated circuit, or any combination of these. This enables the end effector 10 to execute the various processes described above performed by the control unit 40 of the robot arm 1 by itself. The end effector 10 can also execute the judgment process, learning process, and any other process by itself.
- the entire body 11, including the mounting portion 11a and the claw portion 11b, is described as being made of resin, but this is not limited thereto. It is sufficient that at least the portion of the body 11 in which the circuit is formed is made of resin, and other parts of the body 11 may be made of any material other than resin.
- the circuits of the circuit unit 12 are described as including the first circuit 121, the second circuit 122, the third circuit 123, and the fourth circuit 124, but are not limited to this.
- the number, type, and arrangement of the circuits included in the circuit unit 12 in the main body unit 11 may be determined in any configuration that can contribute to each function.
- the circuits of the circuit unit 12 may include only those corresponding to that portion.
- the specified function includes at least one other type of function instead of or in addition to at least a portion of the first function, the second function, the third function, and the fourth function
- the circuits of the circuit unit 12 may include those corresponding to these functions.
- each of the circuits of the circuit unit 12 is formed on the surface of the claw portion 11b and configured to be exposed to the outside in its entirety, but this is not limited to this.
- Each of the circuits of the circuit unit 12 may be sealed with a highly waterproof and water-resistant resin such as PPS resin, except for the parts that contribute to a predetermined function. This can further improve the waterproof and water-resistant properties of the end effector 10.
- FIG. 10 is a schematic diagram showing the appearance of an end effector 10 according to a modified example of the present disclosure.
- the end effector 10 has been described as having a pair of claw portions 11b, i.e., two claw portions 11b, but this is not limited thereto.
- the end effector 10 may have three or more claw portions 11b.
- the end effector 10 may have three claw portions 11b.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Organic Chemistry (AREA)
- Health & Medical Sciences (AREA)
- Medicinal Chemistry (AREA)
- Polymers & Plastics (AREA)
- Human Computer Interaction (AREA)
- Life Sciences & Earth Sciences (AREA)
- Materials Engineering (AREA)
- Wood Science & Technology (AREA)
- Injection Moulding Of Plastics Or The Like (AREA)
- Manipulator (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23918618.2A EP4656336A1 (en) | 2023-01-23 | 2023-12-19 | End effector and robot arm |
| KR1020257020251A KR20250110331A (ko) | 2023-01-23 | 2023-12-19 | 엔드 이펙터 및 로봇 아암 |
| JP2024547165A JP7754338B2 (ja) | 2023-01-23 | 2023-12-19 | エンドエフェクタ及びロボットアーム |
| CN202380090564.6A CN120513154A (zh) | 2023-01-23 | 2023-12-19 | 末端执行器及机械臂 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023008380 | 2023-01-23 | ||
| JP2023-008380 | 2023-01-23 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024157664A1 true WO2024157664A1 (ja) | 2024-08-02 |
Family
ID=91970540
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/045545 Ceased WO2024157664A1 (ja) | 2023-01-23 | 2023-12-19 | エンドエフェクタ及びロボットアーム |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP4656336A1 (https=) |
| JP (1) | JP7754338B2 (https=) |
| KR (1) | KR20250110331A (https=) |
| CN (1) | CN120513154A (https=) |
| TW (1) | TW202430343A (https=) |
| WO (1) | WO2024157664A1 (https=) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01110561A (ja) * | 1987-10-24 | 1989-04-27 | Calp Corp | モーターローター用複合樹脂組成物 |
| JP2005349492A (ja) * | 2004-06-08 | 2005-12-22 | Sharp Corp | ロボットハンド |
| JP2018163047A (ja) * | 2017-03-27 | 2018-10-18 | 学校法人 龍谷大学 | 触覚検知装置 |
| JP2018185346A (ja) * | 2018-08-27 | 2018-11-22 | ミネベアミツミ株式会社 | ひずみゲージ |
| JP2020023045A (ja) * | 2018-07-26 | 2020-02-13 | 東レ株式会社 | アーム部材用繊維強化複合材料、アーム部材およびアーム部材の製造方法 |
| JP2021006359A (ja) * | 2020-03-03 | 2021-01-21 | Dmg森精機株式会社 | 工作機械のための処理支援装置および処理支援方法 |
| JP2022184009A (ja) | 2021-05-31 | 2022-12-13 | Nissha株式会社 | ロボットハンドの触覚センサ付き指およびこれを用いた触覚センサ付きロボットハンド |
| JP2023008380A (ja) | 2021-07-06 | 2023-01-19 | 株式会社日立製作所 | 割当計画作成システム、方法およびプログラム |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6111589B2 (ja) | 2012-10-11 | 2017-04-12 | セイコーエプソン株式会社 | ロボットハンド、ロボット装置及びロボットハンドの製造方法 |
| JP6360695B2 (ja) | 2014-03-17 | 2018-07-18 | 吉田テクノワークス株式会社 | 樹脂成形品への金属メッキ方法 |
-
2023
- 2023-10-20 TW TW112140157A patent/TW202430343A/zh unknown
- 2023-12-19 EP EP23918618.2A patent/EP4656336A1/en active Pending
- 2023-12-19 CN CN202380090564.6A patent/CN120513154A/zh active Pending
- 2023-12-19 KR KR1020257020251A patent/KR20250110331A/ko active Pending
- 2023-12-19 JP JP2024547165A patent/JP7754338B2/ja active Active
- 2023-12-19 WO PCT/JP2023/045545 patent/WO2024157664A1/ja not_active Ceased
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01110561A (ja) * | 1987-10-24 | 1989-04-27 | Calp Corp | モーターローター用複合樹脂組成物 |
| JP2005349492A (ja) * | 2004-06-08 | 2005-12-22 | Sharp Corp | ロボットハンド |
| JP2018163047A (ja) * | 2017-03-27 | 2018-10-18 | 学校法人 龍谷大学 | 触覚検知装置 |
| JP2020023045A (ja) * | 2018-07-26 | 2020-02-13 | 東レ株式会社 | アーム部材用繊維強化複合材料、アーム部材およびアーム部材の製造方法 |
| JP2018185346A (ja) * | 2018-08-27 | 2018-11-22 | ミネベアミツミ株式会社 | ひずみゲージ |
| JP2021006359A (ja) * | 2020-03-03 | 2021-01-21 | Dmg森精機株式会社 | 工作機械のための処理支援装置および処理支援方法 |
| JP2022184009A (ja) | 2021-05-31 | 2022-12-13 | Nissha株式会社 | ロボットハンドの触覚センサ付き指およびこれを用いた触覚センサ付きロボットハンド |
| JP2023008380A (ja) | 2021-07-06 | 2023-01-19 | 株式会社日立製作所 | 割当計画作成システム、方法およびプログラム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4656336A1 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2024157664A1 (https=) | 2024-08-02 |
| EP4656336A1 (en) | 2025-12-03 |
| CN120513154A (zh) | 2025-08-19 |
| JP7754338B2 (ja) | 2025-10-15 |
| TW202430343A (zh) | 2024-08-01 |
| KR20250110331A (ko) | 2025-07-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5292828B2 (ja) | 熱可塑性樹脂成形品と金属の複合体の製造方法 | |
| JP2020515659A (ja) | 繊維強化ポリマー組成物 | |
| JP6701610B2 (ja) | ポリアリーレンスルフィド樹脂組成物、成形品及び製造方法 | |
| JP7754338B2 (ja) | エンドエフェクタ及びロボットアーム | |
| JP2025030853A (ja) | ギヤ、エンドエフェクタ、及びロボットアーム | |
| JP7821563B2 (ja) | ポリアリーレンサルファイド系樹脂組成物及びその成形品 | |
| JP2008174657A (ja) | ポリフェニレンスルフィド樹脂組成物、その製造方法、それからなる成形体ならびに複合成形体およびその製造方法 | |
| JP2003103562A (ja) | 金属インサート樹脂接合成形品の製造方法及び金属インサート樹脂接合成形品を有する圧力計の製造方法 | |
| JP7608684B1 (ja) | エンドエフェクタ及びロボットアーム | |
| JP2026011442A (ja) | エンドエフェクタ、ロボットアーム、及び製造システム | |
| CN112041395A (zh) | 聚芳硫醚系树脂组合物和嵌入成型品 | |
| JP5029311B2 (ja) | ポリアリーレンスルフィド組成物 | |
| WO2025100182A1 (ja) | 測定装置の製造方法及びロボットアーム | |
| JPWO2020246459A1 (ja) | ポリアリーレンスルフィド樹脂組成物、これを成形してなる成形品、積層体、およびそれらの製造方法 | |
| JP2026011443A (ja) | エンドエフェクタ、ロボットアーム、及び製造システム | |
| JP2025035001A (ja) | 測定モジュール及びロボットアーム | |
| JP2021024883A (ja) | ポリアリーレンサルファイド樹脂成形品 | |
| KR102488363B1 (ko) | 폴리아릴렌설피드 수지 조성물, 성형품, 복합 성형품 및 그들의 제조 방법 | |
| JP2008069274A (ja) | ポリアリーレンスルフィド組成物 | |
| JP5029506B2 (ja) | ポリアリーレンスルフィド組成物 | |
| JP2006104222A (ja) | ポリフェニレンスルフィド樹脂組成物 | |
| JP5040630B2 (ja) | ポリアリーレンスルフィド組成物 | |
| JP2025045907A (ja) | 測定装置 | |
| WO2023008417A1 (ja) | ポリアリーレンサルファイド樹脂組成物及びインサート成形品 | |
| JP2016037598A (ja) | 繊維強化熱可塑性樹脂組成物およびその成形体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024547165 Country of ref document: JP |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23918618 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 1020257020251 Country of ref document: KR |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202380090564.6 Country of ref document: CN |
|
| WWP | Wipo information: published in national office |
Ref document number: 1020257020251 Country of ref document: KR |
|
| WWP | Wipo information: published in national office |
Ref document number: 202380090564.6 Country of ref document: CN |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWP | Wipo information: published in national office |
Ref document number: 2023918618 Country of ref document: EP |