WO2024071073A1 - 基板処理システム - Google Patents
基板処理システム Download PDFInfo
- Publication number
- WO2024071073A1 WO2024071073A1 PCT/JP2023/034825 JP2023034825W WO2024071073A1 WO 2024071073 A1 WO2024071073 A1 WO 2024071073A1 JP 2023034825 W JP2023034825 W JP 2023034825W WO 2024071073 A1 WO2024071073 A1 WO 2024071073A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- edge ring
- ring
- mounting surface
- gas
- processing system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images



















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/3244—Gas supply means
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32623—Mechanical discharge control means
- H01J37/32642—Focus rings
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32715—Workpiece holder
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32798—Further details of plasma apparatus not provided for in groups H01J37/3244 - H01J37/32788; special provisions for cleaning or maintenance of the apparatus
- H01J37/32816—Pressure
- H01J37/32834—Exhausting
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32798—Further details of plasma apparatus not provided for in groups H01J37/3244 - H01J37/32788; special provisions for cleaning or maintenance of the apparatus
- H01J37/32889—Connection or combination with other apparatus
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32798—Further details of plasma apparatus not provided for in groups H01J37/3244 - H01J37/32788; special provisions for cleaning or maintenance of the apparatus
- H01J37/32899—Multiple chambers, e.g. cluster tools
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P50/00—Etching of wafers, substrates or parts of devices
- H10P50/20—Dry etching; Plasma etching; Reactive-ion etching
- H10P50/24—Dry etching; Plasma etching; Reactive-ion etching of semiconductor materials
- H10P50/242—Dry etching; Plasma etching; Reactive-ion etching of semiconductor materials of Group IV materials
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/04—Apparatus for manufacture or treatment
- H10P72/0402—Apparatus for fluid treatment
- H10P72/0418—Apparatus for fluid treatment for etching
- H10P72/0421—Apparatus for fluid treatment for etching for drying etching
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/04—Apparatus for manufacture or treatment
- H10P72/0451—Apparatus for manufacturing or treating in a plurality of work-stations
- H10P72/0452—Apparatus for manufacturing or treating in a plurality of work-stations characterised by the layout of the process chambers
- H10P72/0454—Apparatus for manufacturing or treating in a plurality of work-stations characterised by the layout of the process chambers surrounding a central transfer chamber
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/06—Apparatus for monitoring, sorting, marking, testing or measuring
- H10P72/0606—Position monitoring, e.g. misposition detection or presence detection
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/33—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations into and out of processing chamber
- H10P72/3302—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/50—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for positioning, orientation or alignment
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
- H10P72/72—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using electrostatic chucks
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
- H10P72/72—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using electrostatic chucks
- H10P72/722—Details of electrostatic chucks
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
- H10P72/76—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches
- H10P72/7604—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches the wafers being placed on a susceptor, stage or support
- H10P72/7611—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches the wafers being placed on a susceptor, stage or support characterised by edge profile or support profile
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
- H10P72/76—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches
- H10P72/7604—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches the wafers being placed on a susceptor, stage or support
- H10P72/7612—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches the wafers being placed on a susceptor, stage or support characterised by lifting arrangements, e.g. lift pins
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
- H10P72/76—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches
- H10P72/7604—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches the wafers being placed on a susceptor, stage or support
- H10P72/7624—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches the wafers being placed on a susceptor, stage or support characterised by the mechanical construction of the susceptor, stage or support
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
- H10P72/78—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using vacuum or suction, e.g. Bernoulli chucks
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/32—Processing objects by plasma generation
- H01J2237/33—Processing objects by plasma generation characterised by the type of processing
- H01J2237/334—Etching
Definitions
- This disclosure relates to a substrate processing system.
- Patent Document 1 discloses a focus ring replacement method for replacing a focus ring placed on a mounting table so as to surround the periphery of a substrate, which is used in a plasma processing apparatus capable of performing plasma processing on a substrate placed on a mounting table provided inside a processing chamber.
- the replacement method includes a carry-out step of removing the focus ring from the processing chamber by a transport device that transports the focus ring without opening the processing chamber to the atmosphere, and a cleaning step of cleaning the surface of the mounting table on which the focus ring is placed after the carry-out step.
- the replacement method further includes a carry-in step of carrying the focus ring into the processing chamber by the transport device and placing it on the mounting table after the cleaning step, without opening the processing chamber to the atmosphere.
- Patent Document 1 also discloses that, if the focus ring is attached to the mounting table by an electrostatic chuck, a de-electrification process is performed before the carry-out step.
- the technology disclosed herein places the edge ring on the substrate support with high precision.
- One aspect of the present disclosure is a substrate processing system comprising a plasma processing apparatus, a reduced pressure transport apparatus connected to the plasma processing apparatus, and a control device, the plasma processing apparatus comprising a processing vessel configured to be depressurized, a substrate support table provided within the processing vessel and including a substrate mounting surface, a ring mounting surface on which an edge ring is mounted so as to surround the substrate mounting surface, and an electrostatic chuck that electrostatically attracts the edge ring to the ring mounting surface, a lifting mechanism that raises and lowers the edge ring relative to the ring mounting surface, a supply path that supplies gas between the back surface of the edge ring and the ring mounting surface, and a pressure sensor connected to the supply path, and the reduced pressure transport apparatus
- the apparatus has a transport robot that transports the edge ring, and the control device controls the steps of: lowering the edge ring, which has been transported into the processing vessel by the transport robot and handed over to the lifting mechanism, by the lifting mechanism to place it on the ring mounting surface; electrostatically
- the edge ring can be placed on the substrate support with high precision.
- FIG. 1 is a plan view showing an outline of a configuration of a plasma processing system as a substrate processing system according to an embodiment of the present invention.
- FIG. 2 is a diagram showing an outline of the configuration of a transport robot provided in a transfer module.
- FIG. 2 is a vertical cross-sectional view showing an outline of the configuration of a processing module.
- FIG. 4 is a partially enlarged view of FIG. 3 .
- 5 is an enlarged cross-sectional view of a portion different from FIG. 4 in the circumferential direction of the wafer support table.
- 11 is a flowchart showing an example 1 of an edge ring attachment sequence.
- 11A and 11B are diagrams illustrating the state of the processing module when an edge ring attachment sequence is executed.
- 11A and 11B are diagrams illustrating the state of the processing module when an edge ring attachment sequence is executed.
- 11A and 11B are diagrams illustrating the state of the processing module when an edge ring attachment sequence is executed.
- 11A and 11B are diagrams illustrating the state of the processing module when an edge ring attachment sequence is executed.
- 11A and 11B are diagrams illustrating the state of the processing module when an edge ring attachment sequence is executed.
- 11A and 11B are diagrams illustrating the state of the processing module when an edge ring attachment sequence is performed.
- 11A and 11B are diagrams illustrating the state of the processing module when an edge ring attachment sequence is executed.
- 11A and 11B are diagrams illustrating the state of the processing module when an edge ring attachment sequence is executed.
- 11 is a flowchart showing an example 3 of an edge ring attachment sequence.
- 10 is a flowchart showing an example 5 of an edge ring attachment sequence.
- 13 is a flowchart showing an example 7 of an edge ring attachment sequence.
- 13 is a flowchart showing an example 8 of an edge ring attachment sequence.
- 1 is a partial enlarged view for explaining an example of a wafer support stage configured to mount a cover ring in addition to an edge ring;
- 13 is a partial enlarged view for explaining another example of a wafer support table configured to mount a cover ring in addition to an edge ring.
- FIG. FIG. 13 is a partial enlarged view for explaining another example of the electrostatic chuck.
- substrate processing such as etching using plasma, i.e. plasma processing
- plasma processing is performed on substrates such as semiconductor wafers (hereafter referred to as "wafers").
- substrates such as semiconductor wafers (hereafter referred to as "wafers").
- Plasma processing is performed with the substrate placed on a substrate support table inside a reduced pressure processing chamber.
- a ring-shaped member in a planar view known as a focus ring, edge ring, etc. (hereinafter referred to as an "edge ring”) may be placed on the substrate support table so as to surround the periphery of the substrate on the substrate support table.
- the temperature of the substrate support table is adjusted, and the temperature of the substrate is adjusted via the substrate support table.
- the temperature of the edge ring is also important because the temperature of the edge ring affects the plasma processing result of the peripheral portion of the substrate. Therefore, the temperature of the edge ring is also adjusted via the substrate support table.
- an electrostatic chuck is provided on the substrate support stand, and the substrate and edge ring are electrostatically attracted to the electrostatic chuck.
- edge ring is etched and worn out by exposure to plasma, making it necessary to replace it.
- the edge ring becomes worn out, it is generally replaced by an operator with the processing vessel open to the atmosphere, but it is also being considered to replace the edge ring without opening the processing vessel to the atmosphere by using a transport device to transport the edge ring (see Patent Document 1).
- the edge ring When using an edge ring, the edge ring must be appropriately positioned relative to the substrate support table so that uniform processing results can be obtained around the edge of the substrate. Specifically, for example, the center of the electrostatic chuck and the center of the edge ring must be positioned approximately the same.
- the edge ring when the edge ring is placed on the electrostatic chuck of the substrate support stand using a transport device for transporting the edge ring, the position of the edge ring relative to the substrate support stand may become inappropriate. Even if the edge ring is appropriate when it is placed on the substrate, the position of the edge ring relative to the substrate support stand may shift and become inappropriate when electrostatically attracted.
- the technology disclosed herein places the edge ring on the substrate support with high precision.
- Fig. 1 is a plan view showing an outline of the configuration of a plasma processing system as a substrate processing system according to the present embodiment
- Fig. 2 is a view showing an outline of the configuration of a transfer robot provided in a transfer module described later.
- substrate processing such as an etching process using plasma, that is, plasma processing.
- the plasma processing system 1 has an atmospheric section 10 and a reduced pressure section 11, which are connected together via load lock modules 20, 21.
- the atmospheric section 10 includes an atmospheric module that performs a desired process on the wafer W in an atmospheric pressure environment.
- the reduced pressure section 11 includes a reduced pressure module that performs a desired process on the wafer W in a reduced pressure atmosphere (vacuum atmosphere).
- the load lock modules 20 and 21 are provided to connect the loader module 30 included in the atmospheric section 10 and the transfer module 50 included in the reduced pressure section 11 via a gate valve (not shown).
- the load lock modules 20 and 21 are configured to temporarily hold the wafer W.
- the load lock modules 20 and 21 are also configured so that their interiors can be switched between atmospheric pressure and reduced pressure atmospheres.
- the atmospheric section 10 has a loader module 30 equipped with a transport mechanism 40 described below, and a load port 32 on which a FOUP 31 is placed.
- the FOUP 31 is capable of storing multiple wafers W.
- the loader module 30 may also be connected to an orienter module (not shown) that adjusts the horizontal orientation of the wafer W, a buffer module (not shown) that temporarily stores multiple wafers W, and the like.
- the loader module 30 has a rectangular housing, and the interior of the housing is maintained at atmospheric pressure.
- Multiple load ports 32 for example five load ports 32, are arranged side by side on one side that constitutes the long side of the loader module 30 housing.
- Load lock modules 20 and 21 are arranged side by side on the other side that constitutes the long side of the loader module 30 housing.
- a transport mechanism 40 configured to hold and transport a wafer W is provided inside the housing of the loader module 30.
- the transport mechanism 40 has a transport arm 41 that supports the wafer W during transport, a rotating table 42 that rotatably supports the transport arm 41, and a base 43 on which the rotating table 42 is mounted.
- a guide rail 44 is provided inside the loader module 30, extending in the longitudinal direction of the loader module 30.
- the base 43 is provided on the guide rail 44, and the transport mechanism 40 is configured to be movable along the guide rail 44.
- the decompression section 11 has a transfer module 50 as a decompression transport device, a processing module 60 as a plasma processing device, and a storage module 61 as a storage section.
- the insides of the transfer module 50 and the processing module 60 (specifically, the insides of the decompression transport chamber 51 and the chamber 100 described below) are each maintained in a decompression atmosphere, and the inside of the storage module 61 is also maintained in a decompression atmosphere.
- multiple processing modules 60 for example six, are provided, and multiple storage modules 61, for example two, are also provided.
- the number and arrangement of the processing modules 60 are not limited to this embodiment and can be set arbitrarily, as long as at least one processing module equipped with a wafer support table described below is provided.
- the number and arrangement of the storage modules 61 are not limited to this embodiment and can be set arbitrarily, for example at least one is provided.
- the transfer module 50 is configured to transport therein a wafer W.
- the transfer module 50 is also configured to transport therein an edge ring E, which will be described later.
- the transfer module 50 includes a reduced pressure transfer chamber 51 having a housing having a polygonal shape when viewed from above (a rectangular shape when viewed from above in the illustrated example), and the reduced pressure transfer chamber 51 is connected to the load lock modules 20 and 21 .
- the transfer module 50 transfers the wafer W that has been loaded into the load lock module 20 to one of the processing modules 60 , and also unloads the wafer W that has been subjected to the desired plasma processing in the processing module 60 to the load lock module 21 .
- the transfer module 50 may transport the edge ring E in the storage module 61 to one of the processing modules 60 and may also unload the edge ring E in the processing module 60 to the storage module 61 .
- the processing module 60 performs a desired plasma process, such as an etching process, on the wafer W transferred from the transfer module 50.
- the processing module 60 is also connected to the transfer module 50 via a gate valve 62. The specific configuration of the processing module 60 will be described later.
- the storage module 61 stores the edge ring E.
- the storage module 61 is also connected to the transfer module 50 via a gate valve 63.
- a transfer robot 70 is provided inside the reduced pressure transfer chamber 51 of the transfer module 50.
- the transfer robot 70 is configured to be capable of holding and transferring a wafer W.
- the transfer robot 70 is also configured to be capable of holding and transferring an edge ring E.
- the transport robot 70 has a transport arm 71 that is configured to be able to rotate, extend, and move up and down freely while holding a wafer W.
- the tip of the transport arm 71 branches into forks 72, 72 that serve as two holding parts.
- Each of the forks 72, 72 is configured to be able to hold the wafer W and edge ring E to be transported.
- at least one of the forks 72, 72 may be provided with a measuring part 73.
- the measuring part 73 measures information regarding the amount of positional deviation of the edge ring E relative to an electrostatic chuck (described below) that is provided in the processing module 60.
- the measuring part 73 has, for example, a distance sensor (not shown).
- the transfer arm 71 receives the wafer W held in the load lock module 20 and transports it into the processing module 60.
- the transfer arm 71 also receives the wafer W that has been subjected to the desired processing in the processing module 60 and transports it to the load lock module 21.
- the transport arm 71 may receive the edge ring E in the storage module 61 and transport it into the processing module 60.Furthermore, in the transfer module 50, the transport arm 71 may receive the edge ring E in the processing module 60 and transport it out to the storage module 61.
- the plasma processing system 1 includes a controller 80.
- the controller 80 processes computer executable instructions that cause the plasma processing system 1 to perform the various steps described in this disclosure.
- the controller 80 may be configured to control each of the other elements of the plasma processing system 1 such that the plasma processing system 1 performs the various steps described herein.
- some or all of the controller 80 may be included in the other elements of the plasma processing system 1.
- the controller 80 may include, for example, a computer 90.
- the computer 90 may include, for example, a processing unit (CPU: Central Processing Unit) 91, a memory unit 92, and a communication interface 93.
- the processing unit 91 may be configured to perform various control operations and calculations based on programs stored in the memory unit 92.
- the memory unit 92 may include a random access memory (RAM), a read only memory (ROM), a hard disk drive (HDD), a solid state drive (SSD), or a combination thereof.
- the communication interface 93 may communicate with other elements of the plasma processing system 1 via a communication line such as a LAN (Local Area Network).
- LAN Local Area Network
- the transfer mechanism 40 removes the wafer W from the desired FOUP 31 and loads it into the load lock module 20.
- the inside of the load lock module 20 is sealed and depressurized. After that, the inside of the load lock module 20 and the inside of the transfer module 50 are connected to each other.
- the wafer W is then held by the transfer robot 70 and transported from the load lock module 20 to the transfer module 50.
- the gate valve 62 corresponding to the desired processing module 60 is opened, and the transfer robot 70 loads the wafer W into the desired processing module 60.
- the gate valve 62 is then closed, and the desired processing is performed on the wafer W in the processing module 60.
- the processing performed on the wafer W in this processing module 60 will be described later.
- the gate valve 62 is opened, and the wafer W is removed from the processing module 60 by the transfer robot 70. After that, the gate valve 62 is closed.
- the wafer W is loaded into the load lock module 21 by the transfer robot 70.
- the inside of the load lock module 21 is sealed and opened to the atmosphere. After that, the inside of the load lock module 21 and the inside of the loader module 30 are connected to each other.
- the wafer W is held by the transfer mechanism 40 and returned from the load lock module 21 via the loader module 30 to the desired FOUP 31 where it is stored. This completes the wafer processing using the plasma processing system 1.
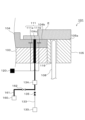
- Fig. 3 is a vertical cross-sectional view showing an outline of the configuration of the processing module 60.
- Fig. 4 is a partially enlarged view of Fig. 3.
- Fig. 5 is an enlarged cross-sectional view of a portion different from Fig. 4 in the circumferential direction of the wafer support table 101 described below.
- the processing module 60 includes a chamber 100 as a processing vessel, a gas supply unit 140, an RF (Radio Frequency) power supply unit 150, and an exhaust system 160.
- the processing module 60 also includes a voltage application unit 120 (see FIG. 4) and a gas supply unit 130 (see FIG. 5).
- the processing module 60 includes a wafer support table 101 as a substrate support table, and an upper electrode 102.
- the chamber 100 is configured so that its interior can be depressurized, and defines a processing space 100s in which plasma is generated.
- the chamber 100 also has a wafer support 101 and other components provided inside.
- the chamber 100 can be made of a material such as aluminum.
- the chamber 100 is also connected to a ground potential.
- the wafer support 101 is disposed, for example, in a lower region within the chamber 100.
- the upper electrode 102 is disposed above the wafer support 101 and can function as part of the ceiling of the chamber 100.
- the wafer support table 101 is configured to support a wafer W.
- the wafer support table 101 includes a lower electrode 103, an electrostatic chuck 104, a support 105, an insulator 106, a lifter 107, and a lifter 108.
- the wafer support table 101 is also configured to support an edge ring E.
- the wafer support table 101 may or may not include an edge ring E as a component thereof.
- the lower electrode 103 is formed of a conductive material such as aluminum.
- a flow path 109 for a temperature control fluid is formed inside the lower electrode 103.
- the temperature control fluid is supplied to the flow path 109 from a chiller unit (not shown) provided outside the chamber 100.
- the temperature control fluid supplied to the flow path 109 is returned to the chiller unit.
- the wafer support table 101 specifically, the electrostatic chuck 104
- the wafer W, or the edge ring E can be cooled to a predetermined temperature by circulating, for example, low-temperature brine as a temperature control fluid in the flow path 109.
- the wafer support table 101 (specifically, the electrostatic chuck 104), the wafer W, or the edge ring E can be heated to a predetermined temperature by circulating, for example, high-temperature brine as a temperature control fluid in the flow path 109.
- the form of the temperature control mechanism is not limited to the above-mentioned flow path 109, and may be another form, such as a resistance heating heater.
- the member on the wafer support table 101 on which the temperature control mechanism is provided is not limited to the lower electrode 103, and may be another member.
- the electrostatic chuck 104 is a member configured to be able to electrostatically attract at least the edge ring E, and is provided on the lower electrode 103.
- the electrostatic chuck 104 may also be configured to be able to electrostatically attract the wafer W.
- the center of the electrostatic chuck 104 constitutes a substrate mounting portion.
- the top surface of the central portion of the electrostatic chuck 104 is higher than the top surface of the peripheral portion.
- the wafer W is mounted on the top surface 104a of the central portion of the electrostatic chuck 104
- the edge ring E is mounted on the top surface 104b of the peripheral portion of the electrostatic chuck 104.
- the top surface 104a of the central portion of the electrostatic chuck 104 serves as a wafer mounting surface on which the wafer W is mounted
- the top surface 104b of the peripheral portion of the electrostatic chuck 104 serves as a ring mounting surface on which the edge ring E is mounted so as to surround the substrate mounting surface
- the edge ring E is a member arranged to surround the wafer W, specifically, a member arranged to surround the wafer W placed on the electrostatic chuck 104. In one embodiment, the edge ring E is arranged to surround a central portion of the electrostatic chuck 104, the upper surface of which is higher than the peripheral portion.
- the edge ring E is formed in a circular ring shape in a plan view.
- the edge ring E is made of a material such as Si, SiO2 , or the like.
- An electrode 110 for electrostatically attracting the wafer W to an upper surface 104a of the central portion may be provided in the electrostatic chuck 104.
- An electrode 111 for electrostatically attracting the edge ring E to an upper surface 104b of the peripheral portion is provided in the electrostatic chuck 104.
- the electrode 111 is, for example, a bipolar type including a pair of electrodes 111a, 111b formed at different positions from each other.
- the electrostatic chuck 104 has a configuration in which electrodes 110 and 111 are sandwiched between insulating materials made of, for example, an insulating material.
- a voltage application unit 120 is connected to the electrode 111 so as to generate an electrical force (specifically, for example, Coulomb force) for electrostatically adsorbing the edge ring E.
- an electrical force specifically, for example, Coulomb force
- the electrode 111 is a bipolar type, it is configured so that the voltage application unit 120 can selectively apply either voltages of opposite polarities or voltages of the same polarity to the pair of electrodes 111a, 111b.
- the voltage application unit 120 includes, for example, two DC power sources 121a and 121b and two switches 122a and 122b.
- the DC power supply 121a is connected to the electrode 111a via the switch 122a, and selectively applies a positive voltage or a negative voltage for electrostatically attracting the edge ring E to the electrode 111a.
- the DC power supply 121b is connected to the electrode 111b via a switch 122b, and selectively applies a positive voltage or a negative voltage for electrostatically attracting the edge ring E to the electrode 111b.
- the voltage application unit 120 may include a DC power supply 121c and a switch 122c.
- the DC power supply 121c is connected to the electrode 110 via a switch 122c, and applies a voltage to the electrode 110 for electrostatically attracting the wafer W thereto.
- the central portion of the electrostatic chuck 104 where the electrode 110 is provided and the peripheral portion where the electrode 111 is provided are integrated, but these central portion and peripheral portion may be separate.
- the electrode 111 for attracting and holding the edge ring E is a bipolar type, but it may be a unipolar type.
- the central portion of the electrostatic chuck 104 is formed, for example, with a diameter smaller than the diameter of the wafer W, so that when the wafer W is placed on the upper surface 104a of the central portion of the electrostatic chuck 104, the peripheral portion of the wafer W protrudes from the central portion of the electrostatic chuck 104.
- the edge ring E has a step formed on its upper portion, and the upper surface of the outer periphery is higher than the upper surface of the inner periphery.
- the inner periphery of the edge ring E is formed to be recessed under the peripheral edge of the wafer W that protrudes from the center of the electrostatic chuck 104. In other words, the inner diameter of the edge ring E is smaller than the outer diameter of the wafer W.
- the support 105 is a member formed in a ring shape in a plan view using an insulating material such as quartz, and is arranged to surround the lower electrode 103 and the electrostatic chuck 104.
- the electrostatic chuck 104 may have a gas discharge hole (not shown) formed in the central upper surface 104a for discharging a heat transfer gas into the gap between the back surface of the placed wafer W and the wafer W.
- a heat transfer gas is supplied from the gas discharge hole from a gas supply unit (not shown).
- the gas supply unit may include one or more gas sources and one or more pressure controllers. In one embodiment, the gas supply unit is configured to supply the heat transfer gas from the gas source to the gas supply hole via a pressure controller, for example.
- gas discharge holes 104c are formed in the upper surface 104b of the peripheral portion of the electrostatic chuck 104. Specifically, one end of the gas discharge hole 104c is open in the upper surface 104b of the peripheral portion of the electrostatic chuck 104. For example, a plurality of gas discharge holes 104c are provided along the circumferential direction of the electrostatic chuck 104. The gas discharge holes 104c supply a heat transfer gas such as helium gas to a gap between the back surface of the edge ring E placed on the upper surface 104b of the peripheral portion of the electrostatic chuck 104 and the upper surface 104b.
- a heat transfer gas such as helium gas
- the gas supply unit 130 may include one or more gas sources 131 and one or more flow rate controllers 132.
- the gas supply unit 130 is configured to supply, for example, a heat transfer gas from a gas source 131 through a flow rate controller 132 to the gas discharge holes 104c.
- Each flow rate controller 132 may include, for example, a mass flow controller or a pressure-controlled flow rate controller.
- the gas discharge holes 104c and the piping 1333 may function as at least a part of a supply path that supplies gas between the upper surface 104b of the peripheral portion of the electrostatic chuck 104, which is the ring mounting surface, and the back surface of the edge ring E.
- the end of the gas discharge hole 104c opposite the upper surface 104b of the peripheral portion is connected to the exhaust system 160 via the piping 161. This allows the periphery of the upper surface 104b of the peripheral portion of the electrostatic chuck 104 to be exhausted via the gas discharge hole 104c. That is, the gas discharge hole 104c can function as an exhaust hole that exhausts the periphery of the ring mounting surface including the upper surface 104b of the peripheral portion of the electrostatic chuck 104.
- the gas discharge hole 104c and the piping 161 can function as at least a part of an exhaust path that exhausts the space between the upper surface 104b of the peripheral portion of the electrostatic chuck 104, which is the ring mounting surface, and the back surface of the edge ring E.
- a pressure sensor 134 for measuring the pressure in the above-mentioned supply path is provided for the electrostatic chuck 104 in order to measure the pressure in the gap between the edge ring E electrostatically attracted to the upper surface 104b of the peripheral portion and the above-mentioned upper surface 104b.
- the pressure sensor 134 is provided in the pipe 133, for example.
- the pipe 133 may be provided with a switching valve 135 for switching between on and off the supply of the heat transfer gas by the gas supply unit 130.
- the pipe 161 may be provided with a switching valve 162 for switching between on and off the exhaust of the periphery of the upper surface 104b of the peripheral portion by the exhaust system 160.
- the insulator 106 in FIG. 3 is a cylindrical member made of ceramic or the like, and supports the support 105.
- the insulator 106 is formed, for example, to have an outer diameter equal to the outer diameter of the support 105, and supports the peripheral portion of the support 105.
- the lifter 107 is a member that moves up and down relative to the upper surface 104a at the center of the electrostatic chuck 104, and is formed, for example, in a columnar shape using a ceramic material. When the lifter 107 moves up, its upper end protrudes from the upper surface 104a, and the lifter 107 is capable of supporting the wafer W.
- the lifter 107 allows the wafer W to be transferred between the wafer support table 101 and the transfer arm 71 of the transfer robot 70.
- Three or more lifters 107 are provided at intervals from one another and extend in the vertical direction.
- the lifters 107 are raised and lowered by an actuator 112.
- the actuator 112 has, for example, a support member 113 that supports the multiple lifters 107, and a drive unit 114 that generates a driving force to raise and lower the support member 113 and raise and lower the multiple lifters 107.
- the drive unit 114 has, for example, a motor (not shown) as a driving source that generates the driving force.
- the lifter 107 is inserted into an insertion hole 115 whose upper end opens into the upper surface 104a of the central portion of the electrostatic chuck 104.
- the insertion hole 115 is formed, for example, to extend downward from the upper surface 104a of the central portion of the electrostatic chuck 104 to the bottom surface of the lower electrode 103.
- the lifter 108 is a lifting member that moves up and down relative to the upper surface 104b of the peripheral portion of the electrostatic chuck 104, and is made of, for example, ceramic.
- the lifter 108 is formed, for example, in a columnar shape except for the upper end (i.e., the tip), which is formed in a hemispherical shape.
- the lifter 108 is configured so that the upper end thereof can protrude from the upper surface 105a of the support 105 when raised.
- Three or more lifters 108 are provided at intervals along the circumferential direction of the electrostatic chuck 104, and extend in the vertical direction.
- the lifter 108 is raised and lowered by an actuator 116.
- the actuator 116 has, for example, a support member 117 provided for each lifter 108, which supports the lifter 108 so that it can move horizontally.
- the support member 117 has, for example, a thrust bearing, to support the lifter 108 so that it can move horizontally.
- the actuator 116 also has a drive unit 118 that generates a driving force to raise and lower the support member 117 and raise and lower the lifter 108.
- the drive unit 118 has, for example, a motor (not shown) as a driving source that generates the driving force.
- the lifter 108 is inserted into an insertion hole 119 whose upper end opens into the upper surface 105a of the support 105.
- the insertion hole 119 is formed, for example, to penetrate the support 105 in the vertical direction.
- the edge ring E can be transferred between the wafer support table 101 and the transfer arm 71 of the transfer robot 70 by the lifter 108 as described above.
- the lifter 108 and the actuator 116 form a lifting mechanism that raises and lowers the edge ring E relative to the ring mounting surface.
- the upper electrode 102 also functions as a gas supply or showerhead that delivers one or more gases from the gas supply 140 into the chamber 100.
- the upper electrode 102 has a gas inlet 102a, a gas diffusion chamber 102b, and a number of gas outlets 102c.
- the gas inlet 102a is, for example, in fluid communication with the gas supply 140 and the gas diffusion chamber 102b.
- the number of gas outlets 102c are in fluid communication with the gas diffusion chamber 102b and the interior of the chamber 100.
- the upper electrode 102 is configured to deliver a gas, such as one or more process gases, from the gas inlet 102a through the gas diffusion chamber 102b and the number of gas outlets 102c into the chamber 100.
- the gas supply 140 may include one or more gas sources 141 and one or more flow controllers 142.
- the gas supply 140 is configured to supply, for example, one or more gases from a respective gas source 141 to the gas inlet 102a via a respective flow controller 142.
- Each flow controller 142 may include, for example, a mass flow controller or a pressure-controlled flow controller.
- the gas supply 140 may include one or more flow modulation devices to modulate or pulse the flow rate of one or more gases.
- the RF power supply 150 is configured to supply RF power, e.g., one or more RF signals, to one or more electrodes, such as the lower electrode 103, the upper electrode 102, or both the lower electrode 103 and the upper electrode 102. This generates a plasma from one or more process gases supplied in the chamber 100, i.e., the processing space 100s.
- the RF power supply 150 can function as at least a part of a plasma generating unit that generates plasma in the chamber 100.
- the plasma generating unit is specifically configured to generate plasma from one or more gases in the chamber 100.
- the RF power supply 150 includes, for example, two RF generating units 151a, 151b and two matching circuits 152a, 152b.
- the RF power supply 150 is configured to supply a first RF signal from the first RF generating unit 151a to the lower electrode 103 via the first matching circuit 152a.
- the first RF signal may have a frequency in the range of 27 MHz to 100 MHz.
- the RF power supply unit 150 is configured to supply a second RF signal from the second RF generating unit 151b to the lower electrode 103 via the second matching circuit 152b.
- the second RF signal may have a frequency in the range of 400 kHz to 13.56 MHz.
- a DC (Direct Current) pulse generating unit may be used in place of the second RF generating unit 151b.
- the RF power supply 150 may be configured to supply a first RF signal from an RF generator to the lower electrode 103, a second RF signal from another RF generator to the lower electrode 103, and a third RF signal from yet another RF generator to the lower electrode 103.
- a DC voltage may be applied to the upper electrode 102.
- one or more RF signals may be pulsed or modulated in amplitude.
- Amplitude modulation may include pulsing the RF signal amplitude between an on state and an off state, or between two or more different on states.
- the exhaust system 160 may be connected to an exhaust port 100e provided at the bottom of the chamber 100, for example.
- the exhaust system 160 may include a pressure valve and a vacuum pump.
- the vacuum pump may include a turbomolecular pump, a roughing pump, or a combination thereof.
- ⁇ Wafer Processing in Processing Module 60 Next, a description will be given of an example of wafer processing performed using the processing module 60.
- a plasma processing such as an etching process is performed on the wafer W.
- the wafer W is loaded into the chamber 100 by the transfer robot 70, and the lifter 107 is raised and lowered to place the wafer W on the electrostatic chuck 104.
- a DC voltage is then applied from the DC power supply 121c to the electrode 110 of the electrostatic chuck 104, so that the wafer W is electrostatically attracted to and held on the electrostatic chuck 104.
- the exhaust system 160 reduces the pressure inside the chamber 100 to a predetermined vacuum level.
- a processing gas is supplied from the gas supply unit 140 to the processing space 100s via the upper electrode 102.
- high frequency power HF for plasma generation is supplied from the RF power supply unit 150 to the lower electrode 103, which excites the processing gas and generates plasma.
- high frequency power LF for ion attraction may also be supplied from the RF power supply unit 150. Then, plasma processing is performed on the wafer W by the action of the generated plasma.
- a DC voltage is applied from DC power sources 121a and 121b to electrode 111 of electrostatic chuck 104, whereby edge ring E is electrostatically attracted and held on electrostatic chuck 104.
- a heat transfer gas is discharged via gas supply unit 130 or the like toward the bottom surfaces of wafer W and edge ring E attracted and held on electrostatic chuck 104.
- the supply of high frequency power HF from the RF power supply unit 150 and the supply of processing gas from the gas supply unit 140 are stopped. If high frequency power LF was being supplied during plasma processing, the supply of the high frequency power LF is also stopped. Next, the adsorption and holding of the wafer W by the electrostatic chuck 104 is stopped. In addition, the supply of heat transfer gas to the bottom surface of the wafer W may be stopped.
- the wafer W is raised by the lifter 107 and detached from the electrostatic chuck 104.
- a de-electrification process may be performed on the wafer W.
- the transfer robot 70 removes the wafer W from the chamber 100, completing the series of wafer processing steps.
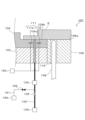
- FIG. 6 is a flow chart showing an example 1 of the sequence for attaching the edge ring E.
- FIGS. 7 to 14 are schematic diagrams showing the state of the processing module 60 when the sequence for attaching the edge ring E is executed.
- the valve in the open state and the voltage application unit 120 in the ON state are painted white
- the valve in the closed state and the voltage application unit 120 in the OFF state are painted black
- the pipe through which the gas flows is shown in thick lines.
- the gas discharge hole 104c in a state in which exhaust is performed through the gas discharge hole 104c is shown in black
- the gas discharge hole 104c in a state in which the heat transfer gas exists therein is shown in gray
- the gas discharge hole 104c in other states is shown in white. Note that the following steps are executed by the plasma processing system 1 according to the control and calculation of the control device 80 (specifically, the processing unit 91) based on the program stored in the storage unit 92.
- step S1 the edge ring E is transported into the chamber 100 by the transport robot 70 and handed over to the lifting mechanism including the lifter 108, and is then lowered by the lifting mechanism and placed on the ring placement surface (step S1).
- This step S1 is performed in a state where no wafer W is present in the chamber 100.
- step S1 for example, the edge ring E in the storage module 61 is first transferred by the transfer robot 70 into the chamber 100 of the processing module 60 to which the edge ring E is to be attached.
- the edge ring E in the storage module 61 is held by the fork 72 of the transfer arm 71 of the transfer robot 70.
- the chamber 100 is evacuated by the exhaust system 160 without gas being discharged through the upper electrode 102, and the chamber 100 is made into a high vacuum.
- the corresponding gate valve 62 is opened, and the fork 72 holding the edge ring E is inserted into the chamber 100 through a loading/unloading port (not shown).
- the edge ring E is transferred by the fork 72 above the upper surface 104b of the peripheral portion of the electrostatic chuck 104 and the upper surface 105a of the support 105.
- the wafer W is not placed on the upper surface 104a of the central portion of the electrostatic chuck 104.
- the edge ring E is transferred from the transfer robot 70 to the lifter 108 . Specifically, all the lifters 108 are raised, and the edge ring E is transferred from the forks 72 to the lifters 108, as shown in Fig. 8. Thereafter, the forks 72 are removed from the chamber 100, and the gate valve 62 is closed.
- the edge ring E is lowered by a lifting mechanism including a lifter 108 and placed on the upper surface 104b of the peripheral portion of the electrostatic chuck 104, which is the ring mounting surface. Specifically, the lifter 108 is lowered until the upper end of the lifter 108 fits into the insertion hole 119. As a result, the edge ring E is placed on the upper surface 104b of the peripheral portion of the electrostatic chuck 104, which is the ring placement surface, as shown in FIG.
- the edge ring E is vacuum-adsorbed onto the ring mounting surface (step S2). Specifically, in a state in which no wafer W is present in the chamber 100, the periphery of the ring mounting surface is evacuated via the gas ejection holes 104c, which also function as exhaust holes. 10, the switching valve 162 is opened, and the exhaust system 160 exhausts air from the periphery of the upper surface 104b of the electrostatic chuck 104 and the periphery of the upper surface 105a of the support 105 through the gas discharge holes 104c. In particular, the vicinity of the upper surface 104b of the peripheral portion of the electrostatic chuck 104 is exhausted through the gas discharge holes 104c. As a result, the edge ring E is vacuum-attached to the upper surface 104b of the peripheral portion of the electrostatic chuck 104, which is the ring mounting surface.
- the placed edge ring E is electrostatically attracted to the ring mounting surface (step S3). Specifically, in a state where no wafer W is present in the chamber 100, the edge ring E is placed on the ring mounting surface, and exhaust is being performed via the gas ejection holes 104c, a voltage is applied to the electrode 111 of the electrostatic chuck 104. 11 , in a state where an edge ring E is placed on an upper surface 104b of the peripheral portion of the electrostatic chuck 104, which is a ring mounting surface, and exhaust is being performed via the gas discharge holes 104c, the voltage application unit 120 is turned on, specifically, the DC power supplies 121a and 121b are turned on.
- a DC voltage is applied to the electrode 111 of the electrostatic chuck 104.
- DC voltages having mutually opposite polarities are applied to the electrodes 111a and 111b.
- a voltage may be applied to the electrode 111 of the electrostatic chuck 104 while the exhaust is stopped.
- step S4 gas is supplied to the supply passage including the gas ejection holes 104c so that the pressure in the supply passage is maintained higher than the pressure in the chamber 100 (step S4). Specifically, when no wafer W is present in the chamber 100, exhaust through the gas discharge holes 104c is stopped, and a predetermined gas is discharged through the gas discharge holes 104c into the gap between the ring mounting surface and the edge ring E, so that the pressure in the gap is made higher than the pressure in the chamber 100. At the end of step S4, the supply of gas to the supply path, that is, the discharge of the predetermined gas from the gas discharge hole 104c, is stopped.
- step S4 the switching valve 162 is closed and exhaust through the gas discharge hole 104c by the exhaust system 160 is stopped.
- the switching valve 135 is opened and the heat transfer gas supplied from the gas supply unit 130 is discharged into the gap through the gas discharge hole 104c.
- the target pressure is, for example, the pressure in the gap during plasma processing.
- step S5 After the gas is supplied in step S4, the pressure in the supply path including the gas ejection holes 104c is measured (step S5).
- step S5 specifically, after a predetermined time has elapsed since the gas supply was stopped in step S4, the pressure in pipe 133 (more specifically, the pressure downstream of switching valve 135 of pipe 133) is measured by pressure sensor 134.
- the predetermined time is, for example, 10 to 100 seconds, and this information is stored in memory unit 92 in advance.
- the pressure downstream of the switching valve 135 of the pipe 133 is approximately equal to the pressure in the gap between the ring mounting surface and the edge ring E. Therefore, step S5 can be rephrased as a process of measuring the pressure in the gap between the ring mounting surface and the edge ring E.
- the control device 80 judges the mounting state of the edge ring E on the ring mounting surface based on the measurement result in step S5, that is, judges whether the mounting state is proper or not (step S6). Specifically, the control device 80 determines whether or not the predetermined gas is leaking from the gap based on the measurement result in step S5. More specifically, the control device 80 determines whether or not the pressure measured in step S5 is less than a threshold value in order to determine whether or not the predetermined gas is leaking from the gap. This threshold value is set to, for example, 90% to 98% of the target pressure, and the information on this is stored in advance in the storage unit 92.
- step S6 if it is determined that the mounting condition of the edge ring E on the ring mounting surface is not appropriate, i.e., if it is determined that a specified gas is leaking from the above-mentioned gap (NO), information regarding the amount of positional deviation of the edge ring E relative to the electrostatic chuck 104 is measured by the measuring unit 73 of the transport robot 70. Specifically, when it is determined that a predetermined gas is leaking from the gap, that is, when the pressure measured in step S5 is less than the threshold value, first, the gate valve 62 is opened, and the fork 72 not holding the wafer W and the edge ring E is inserted into the chamber 100.
- the distance sensor included in the measuring unit 73 measures the distance from the distance sensor to the wafer support table 101 at predetermined intervals in the circumferential direction of the electrostatic chuck 104 and at predetermined minute intervals in the radial direction of the electrostatic chuck 104.
- the control device 80 calculates the amount of positional deviation of the edge ring E with respect to the electrostatic chuck 104 based on the measurement result by the measuring unit 73 (step S8). Specifically, the control device 80 identifies the peripheral edge of the central portion of the electrostatic chuck 104 and the inner peripheral edge of the edge ring E at predetermined intervals in the circumferential direction of the electrostatic chuck 104 from the measurement result in step S7, and calculates the distance from the peripheral edge of the central portion of the electrostatic chuck 104 to the inner peripheral edge of the edge ring E.
- control device 80 calculates the amount of positional deviation of the edge ring E relative to the electrostatic chuck 104 (specifically, the distance from the center of the central portion of the electrostatic chuck 104 to the center of the edge ring E) based on the calculation results at the predetermined intervals.
- the amount of positional deviation calculated here also includes the direction of the positional deviation.
- control device 80 determines whether the amount of positional deviation calculated in step S8 exceeds a threshold value (step S9).
- This threshold value is, for example, 200 ⁇ m, and this information is stored in advance in the storage unit 92.
- step S9 If it is determined in step S9 that the amount of positional deviation exceeds the threshold (YES), the position of the edge ring E on the ring mounting surface is adjusted (step S10).
- the application of voltage to the electrode 111 of the electrostatic chuck 104 is stopped, and the edge ring E is raised by the lifting mechanism including the lifter 108, and then the edge ring E is transferred to the transfer robot 70. More specifically, the application of DC voltage from the voltage application unit 120 to the electrode 111 is stopped, and the fork 72 of the transfer robot 70 is retracted from above the wafer support table 101. Next, the edge ring E is de-electrified, and then all the lifters 108 are raised, and the edge ring E is transferred from the wafer support table 101 to the lifters 108. Next, the fork 72 of the transfer arm 71 is moved between the wafer support table 101 and the edge ring E supported by the lifters 108. Next, all the lifters 108 are lowered, and the edge ring E is transferred from the lifters 108 to the forks 72.
- the edge ring E is moved to a position based on the amount of positional deviation calculated in step S8.
- the fork 72 is moved to a corrected position based on the amount of positional deviation calculated in step S8.
- the corrected position is calculated in advance by the control device 80 from the amount of positional deviation calculated in step S8 so that the amount of positional deviation approaches zero.
- edge ring E is returned to the lifting mechanism including the lifter 108, and the edge ring E is lowered by the lifting mechanism and placed again on the ring placement surface.
- the edge ring E is transferred from the forks 72 to the lifters 108.
- the forks 72 are removed from the chamber 100, and the gate valve 62 is closed.
- the edge ring E is lowered by a lifting mechanism including a lifter 108 and placed on the upper surface 104b of the peripheral portion of the electrostatic chuck 104, which is the ring mounting surface.
- the lifter 108 is lowered until the upper end of the lifter 108 fits into the insertion hole 119.
- the edge ring E is placed on the upper surface 104b of the peripheral portion of the electrostatic chuck 104, which is the ring placement surface.
- step S10 the sequence returns to step S2, where the edge ring E is vacuum-adsorbed, etc.
- step S6 if it is determined that the mounting state of the edge ring E on the edge ring mounting surface is appropriate, that is, if it is determined that no leakage of a predetermined gas is occurring from the gap (specifically, if the pressure in the gap measured in step S5 is equal to or greater than a threshold value) (YES), step S11, which is similar to step S7, is performed. As a result, information regarding the amount of positional deviation of the edge ring E relative to the electrostatic chuck 104 is measured by the measurement unit 73.
- control device 80 calculates the amount of positional deviation of the edge ring E relative to the electrostatic chuck 104 based on the measurement results from the measurement unit 73 (step S12).
- control device 80 determines whether the position deviation amount calculated in step S13 is equal to or less than a threshold value (step S13).
- step S14 a process for stabilizing the electrostatic attraction of the edge ring E is performed (step S14). Specifically, for example, plasma of the processing gas is generated in the chamber 100, and the charged state of the edge ring E is changed by the plasma, thereby strengthening the electrostatic adsorption force of the edge ring E. This completes the sequence.
- step S13 determines whether the amount of positional deviation exceeds the threshold value (NO)
- step S16 the position of the edge ring E on the ring mounting surface is adjusted (step S16) in the same manner as in step S10, with no wafer W present in the chamber 100.
- step S16 the sequence returns to step S2, and the edge ring E is vacuum-adsorbed, etc.
- step S9 if it is determined in step S9 that the amount of positional deviation does not exceed the threshold (if NO), damage to at least one of the edge ring E and the electrostatic chuck 104, adhesion of foreign matter to the upper surface 104b of the peripheral portion of the electrostatic chuck 104, etc. are expected. Therefore, the operation of the whole or part of the plasma processing system 1 (for example, only the corresponding processing module 60) is stopped (step S17). Thereafter, the sequence is terminated. At the time of termination, an alarm may be issued or an operator may be notified.
- step S9 If it is determined in step S9 that the amount of positional deviation does not exceed the threshold value (NO), the edge ring E may be temporarily removed from the wafer support table 101 and then placed on the wafer support table 101 again, and then the steps from step S2 onwards may be repeated. Alternatively, after the edge ring E is unloaded from the chamber 100, the steps from step S1 onwards may be performed on a new edge ring E.
- step S2 is performed after step S1, but step S2 may be performed in parallel with step S1. Specifically, after the edge ring E is handed over to the lifter 108 in step S1, and before the edge ring E is placed on the lowered ring mounting surface, exhaust of the air around the ring mounting surface may be performed in step S2 via the gas discharge hole 104c, which also functions as an exhaust hole.
- FIG. 15 is a flowchart showing a third example of the attachment sequence of the edge ring E.
- the exhaust system 160 evacuates the chamber 100 without any gas being ejected through the upper electrode 102, and the edge ring E is transported into the chamber 100 and the ring mounting surface of the edge ring E is placed in a state where the chamber 100 is at a high vacuum.
- step S21 gas is discharged into the processing space 100s via the upper electrode 102, and the exhaust system 160 exhausts the chamber 100 to a quasi-high vacuum (e.g., several hundred mTorr) inside the chamber 100.
- a quasi-high vacuum e.g., several hundred mTorr
- Gas may be discharged into the processing space 100s via the upper electrode 102 as described above, or may be discharged from a gas introduction port (not shown) without passing through the upper electrode 102.
- step S21 for example, first, for the processing module 60 to which the edge ring E is to be attached, an inert gas such as nitrogen gas is supplied from the gas supply unit 140 to the processing space 100s via the upper electrode 102, and the chamber 100 is evacuated by the exhaust system 160. As a result, the pressure in the chamber 100 is adjusted to a quasi-high vacuum, which is a higher vacuum level than that in the transfer module 50. Then, the corresponding gate valve 62 is opened, and the fork 72 holding the edge ring E is inserted into the chamber 100 through the loading/unloading port (not shown).
- an inert gas such as nitrogen gas is supplied from the gas supply unit 140 to the processing space 100s via the upper electrode 102
- the chamber 100 is evacuated by the exhaust system 160.
- the pressure in the chamber 100 is adjusted to a quasi-high vacuum, which is a higher vacuum level than that in the transfer module 50.
- the corresponding gate valve 62 is opened, and the fork 72 holding the edge ring E is inserted into the chamber
- step S21 is the same as in step S2.
- step S21 the pressure inside the chamber 100 is adjusted to a quasi-high vacuum, which is higher than the vacuum inside the transfer module 50, and the above-mentioned steps S2 and S3 are carried out.
- steps S2 and S3 gas discharge into the processing space 100s via the upper electrode 102 is stopped, and the pressure in the chamber 100 is set to a high vacuum, and the supply path including the gas discharge holes 104c is pressurized (step S22) in the same manner as in step S4. Note that the supply path including the gas discharge holes 104c may be pressurized without stopping the gas discharge into the processing space 100s and with the pressure in the chamber 100 at a quasi-high vacuum.
- step S22 the steps from step S5 onwards in the mounting sequence example 1 are carried out.
- step S2 is performed in a state in which the pressure in chamber 100 is adjusted to a quasi-high vacuum, which is a higher degree of vacuum than that in transfer module 50.
- step S2 may be performed in parallel with step S21.
- FIG. 16 is a flowchart showing Example 5 of the attachment sequence of the edge ring E.
- the edge ring E is electrostatically attracted without plasma being generated in the chamber 100.
- steps S1 and S2 of the mounting sequence example 1 are performed in order, and then step S3 is replaced with step S31.
- step S31 gas for generating plasma is discharged into the processing space 100s through the upper electrode 102, and the exhaust system 160 exhausts the chamber 100.
- high frequency power HF for generating plasma is supplied from the RF power supply unit 150 to, for example, the lower electrode 103. This excites the gas in the processing space 100s to generate plasma.
- the present invention is not limited to this, and the high frequency power HF may be supplied to the upper electrode 102.
- step S31 the steps from step S4 onward in the mounting sequence example 1 are carried out.
- step S2 is performed after step S1.
- step S2 may be performed in parallel with step S1.
- step S21 in mounting sequence example 3 may be performed, and after step S21, the pressure in chamber 100 may be adjusted to a quasi-high vacuum, which is a higher vacuum level than that in transfer module 50, and then the aforementioned step S2 may be performed.
- FIG. 17 is a flowchart showing Example 7 of the attachment sequence of the edge ring E.
- step S6 determines that the placement state of the edge ring E is appropriate (YES)
- step S11 similar to step S7 is performed, and information regarding the amount of positional deviation of the edge ring E relative to the electrostatic chuck 104 is measured by the measurement unit 73.
- step S11 is not performed and a process of stabilizing the electrostatic adsorption of the edge ring E in step S14 is performed.
- the edge ring E which is transported into the chamber 100 by the transport robot 70 and handed over to a lifting mechanism including the lifter 108, is lowered by the lifting mechanism to be mounted on a ring mounting surface; and the mounted edge ring E is electrostatically attracted to the ring mounting surface.
- the following steps are performed: supplying gas to the supply path including the gas ejection holes 104c so that the pressure of the supply path is kept higher than the pressure in the chamber 100; measuring the pressure of the supply path; and determining the mounting state of the edge ring E based on the measured pressure.
- the edge ring E since the mounting state of the edge ring E is determined in this manner, when the mounting state of the edge ring E is not appropriate, the edge ring E can be mounted on the electrostatic chuck 104 with high accuracy by adjusting the position of the edge ring E on the ring mounting surface.
- a process of vacuum adsorbing the edge ring E to the ring mounting surface is performed before electrostatic adsorption of the edge ring E placed on the ring mounting surface. Therefore, when the edge ring E is electrostatically adsorbed to the ring mounting surface, the gas present in the gap between the ring mounting surface and the edge ring E can be reduced. Therefore, when the edge ring E is electrostatically adsorbed to the ring mounting surface, the gas present in the gap can be prevented from interfering with the position of the edge ring E relative to the electrostatic chuck 104.
- mounting sequence example 1-7 when determining the misalignment of the edge ring E, it is possible to check before plasma processing whether there will be any leakage of heat transfer gas when the heat transfer gas is supplied to the gap during plasma processing. If heat transfer gas leaks during plasma processing, it becomes difficult to appropriately adjust the temperature of the edge ring E via the electrostatic chuck 104 and the heat transfer gas. In contrast, in mounting sequence example 1-7, as described above, it is possible to check in advance whether there will be any leakage of heat transfer gas during plasma processing, thereby preventing the above-mentioned difficulty in appropriately adjusting the temperature of the edge ring E.
- FIG. 18 is a flowchart showing an eighth example of the attachment sequence of the edge ring E.
- a heat transfer gas is supplied to the supply path including the gas ejection holes 104c, i.e., between the ring mounting surface and the edge ring E in step S4, and then steps S5 and S6 are performed to determine the mounting state of the edge ring E.
- step S7 or step S11 information regarding the amount of positional deviation of the edge ring E with respect to the electrostatic chuck 104 is measured by the measuring unit 73 of the transfer robot 70.
- step S11 is performed, and information regarding the amount of positional deviation of the edge ring E relative to the electrostatic chuck 104 is measured by the measurement unit 73.
- step S12 the control device 80 calculates the amount of positional deviation of the edge ring E with respect to the electrostatic chuck 104 based on the measurement result by the measuring unit 73.
- step S13 the control device 80 determines whether the amount of positional deviation calculated in step S12 is equal to or smaller than a threshold value (step S13). If it is determined in step S13 that the amount of positional deviation is equal to or smaller than the threshold value (YES), a process of stabilizing the electrostatic attraction of the edge ring E is performed (step S14).
- step S2 is performed after step S1, but step S2 may be performed in parallel with step S1.
- step S21 in mounting sequence example 3 may be performed, and after step S21, the pressure in chamber 100 may be adjusted to a quasi-high vacuum, which is a higher vacuum level than that in transfer module 50, and the above-mentioned steps S2 and S3 may be performed.
- step S31 of mounting sequence example 5 may be performed instead of step S3, and electrostatic adsorption of the edge ring E may be performed while plasma is being generated in the chamber 100.
- the edge ring E since the positional deviation amount of the edge ring E is acquired in this manner, when the positional deviation amount of the edge ring E relative to the electrostatic chuck 104 is large, the edge ring E can be mounted with high accuracy by adjusting the position of the edge ring E on the ring mounting surface. In addition, it is possible to suppress the plasma processing from being performed while the positional deviation amount is large.
- mounting sequence example 8-12 similar to mounting sequence example 1-7, when the edge ring E is electrostatically attracted to the ring mounting surface, the gas present in the gap between the ring mounting surface and the edge ring E can be reduced. Therefore, when the edge ring E is electrostatically attracted to the ring mounting surface, the gas present in the gap can be prevented from interfering with the position of the edge ring E relative to the electrostatic chuck 104.
- the predetermined gas supplied to the gap between the ring mounting surface and the edge ring E is a heat transfer gas, but it may be a gas other than a heat transfer gas, for example, nitrogen gas. Furthermore, if it is determined in step S6 that the placement state of the edge ring E is not appropriate (if NO), steps S7 to S10 are not performed, and step S17 is performed, and operation of the entire or partial plasma processing system 1 may be stopped.
- step S13 if it is determined that the amount of positional deviation is equal to or less than the threshold value (if YES), steps S4 to S6 of the mounting sequence example 1 may be performed before step S14 is performed. In this case, if it is determined that the edge ring E is not properly placed in step S6 (if NO), the edge ring E may be temporarily removed from the wafer support table 101 and then placed on the wafer support table 101 again, and then the steps from step S2 onwards may be repeated. In addition, if it is determined that the edge ring E is not properly placed in step S6 (if NO), instead, step S17 may be performed and the operation of the entire or part of the plasma processing system 1 may be stopped.
- step S13 Before electrostatic attraction of the edge ring E in step S3 or the like and after steps S11 and S12, step S13 may be performed, i.e., it may be determined whether the positional deviation amount calculated in step S12 is equal to or less than a threshold value. If it is determined that the positional deviation amount is equal to or less than the threshold value, steps subsequent to the electrostatic attraction step of the edge ring E in step S3 or the like may be performed. On the other hand, if it is determined that the positional deviation amount exceeds the threshold value, for example, the position of the edge ring E in step S16 may be adjusted and then the sequence may be returned to step S2.
- mounting sequence examples 3, 4, and 10 an inert gas such as nitrogen gas is supplied into the processing space 100s, and the chamber 100 is evacuated by the exhaust system 160, and the pressure in the chamber 100 is adjusted to a quasi-high vacuum.
- the gate valve 62 is opened, and the edge ring E is loaded into the chamber 100.
- the edge ring E may be loaded into the chamber 100, the gate valve 62 may be closed, and then the pressure in the chamber 100 may be adjusted to a quasi-high vacuum.
- step S2 the vacuum suction process of edge ring E in step S2 may be omitted.
- the mounting sequence examples 8 to 12 do not use the pressure sensor 134. Therefore, when the mounting sequence examples 8 to 12 are adopted, the pressure sensor 134 may be omitted.
- the measuring unit 73 may have a camera instead of the distance sensor as long as information regarding the amount of positional deviation of the edge ring E relative to the electrostatic chuck 104 can be measured.
- exhaust through the gas ejection holes 104c which also function as exhaust holes, and exhaust from within the chamber 100, that is, the processing space 100s, are performed by the common exhaust system 160. However, these may be performed by different exhaust systems.
- the exhaust hole and the gas discharge hole 104c may be provided separately. That is, an exhaust path including the exhaust hole, which exhausts the space between the back surface of the edge ring E and the ring mounting surface, and a supply path including the gas discharge hole 104c may be provided separately.
- a cover ring may be placed on the wafer support table used in the plasma processing apparatus to cover the outer surface of the edge ring.
- the technology disclosed herein can also be applied in this case.
- FIG. 19 is a partial enlarged view for explaining an example of a wafer support stage configured to mount a cover ring CA in addition to an edge ring EA.
- the following describes the wafer support table 101A in FIG. 19, focusing on the differences from the wafer support table 101 shown in FIG. 3 and the like.
- the wafer support table 101A in FIG. 19 includes an electrostatic chuck 104, an insulator 106, and a lifter 107, similar to the wafer support table 101 shown in FIG. 3, etc., as well as a lower electrode 103A, a support 105A, and a lifter 108A.
- the wafer support table 101A is configured to support both the edge ring EA and the cover ring CA.
- the lower outer periphery of the lower electrode 103A and the upper inner periphery of the support 105A are formed to overlap in a plan view.
- the lower electrode 103A and the support 105A are also provided with an insertion hole 119A through which the lifter 108A is inserted.
- the insertion hole 119A is formed to extend downward from the upper surface 105Aa of the inner periphery of the support 105A to the bottom surface of the lower outer periphery of the lower electrode 103A.
- the electrostatic chuck 104 is placed on the lower electrode 103A.
- the edge ring EA is placed on the upper surface 104b of the peripheral portion of the electrostatic chuck 104, and the cover ring CA is placed on the upper surface 105Aa of the support 105A.
- the upper surface 105Aa of the support 105A and the upper surface of the lower electrode 103A are approximately the same height.
- the edge ring EA is formed with an outer diameter larger than that of the electrostatic chuck 104. Therefore, when the edge ring EA is placed on the upper surface 104b of the peripheral portion of the electrostatic chuck 104, the peripheral portion of the edge ring EA protrudes beyond the peripheral portion of the electrostatic chuck 104.
- the covering ring CA is a member arranged to cover the outer surface of the edge ring EA. Like the edge ring EA, the covering ring CA is also formed in a ring shape when viewed from above. In one embodiment, the covering ring CA has a protrusion CA1 at its bottom that protrudes radially inward.
- the covering ring CA also has through holes CA2 through which the lifters 108A are inserted at positions corresponding to the respective lifters 108A.
- the through holes CA2 penetrate from the bottom surface of the covering ring CA to the edge ring EA.
- the through holes CA2 are provided in a portion (specifically, for example, the convex portion CA1) that overlaps with the inner periphery of the covering ring CA, which overlaps with the peripheral portion of the edge ring EA in a plan view.
- the lifter 108A is configured to be able to protrude from the upper surface 105Aa of the inner periphery of the support 105A, and is raised and lowered so that the amount of protrusion from the upper surface 105Aa can be adjusted freely. Specifically, the lifter 108A is configured to be able to protrude from a position on the upper surface 105Aa of the inner periphery of the support 105A that overlaps with the edge ring EA and the covering ring CA in a planar view.
- the insertion hole 119A through which the lifter 108A is inserted is formed at a position that overlaps with the edge ring EA and the covering ring CA in a planar view.
- the lifter 108A Similar to the lifter 108 in FIG. 3 and the like, three or more lifters 108A are provided at intervals along the circumferential direction of the electrostatic chuck 104.
- the lifter 108A also has a first engagement portion 108Aa and a second engagement portion 108Ab.
- the first engagement portion 108Aa is formed by the upper part of the lifter 108A.
- the first engagement portion 108Aa is formed, for example, in a columnar shape except for the upper end (i.e., the tip), which is formed in a hemispherical shape.
- This first engagement portion 108Aa protrudes upward from the through hole CA2 of the cover ring CA and engages with the edge ring E.
- the first engagement portion 108Aa passes through the through hole CA2 of the cover ring CA and abuts against the bottom surface of the edge ring EA, thereby supporting the edge ring EA from the bottom surface.
- the second engagement portion 108Ab is located below the first engagement portion 108Aa and engages with the covering CA.
- the second engagement portion 108Ab does not pass through the through hole CA2 of the covering CA, but abuts on the bottom surface of the covering CA, thereby supporting the covering CA from the bottom surface.
- the second engaging portion 108Ab is connected to the base end side of the first engaging portion 108Aa along the axial direction of the lifter 108A.
- the second engaging portion 108Ab has a protruding portion 108Ac that protrudes outward from the outer periphery of the first engaging portion 108Aa at a position where the second engaging portion 108Ab is connected to the first engaging portion 108Aa.
- first engaging portion 108Aa, the second engaging portion 108Ab, and the protruding portion 108Ac are not particularly limited.
- first engaging portion 108Aa, the second engaging portion 108Ab, and the protruding portion 108Ac may each be a cylindrical member and may be coaxial with each other.
- the actuator 116 described above raises and lowers the lifter 108A, with the covering CA engaged with the second engagement portion 108b, thereby raising and lowering the covering CA.
- the actuator 116 raises and lowers the lifter 108, with the edge ring E engaged with the first engagement portion 108Aa, thereby raising and lowering the edge ring E.
- the second engagement portion 108Ab when the lifter 108 is in its lowered position, the second engagement portion 108Ab is not positioned within the insertion hole 119A, but it may be positioned therein.
- a sleeve (not shown) may be provided within the hole of the lower electrode 103A that constitutes the insertion hole 119A.
- the lifter 108 is inserted into this sleeve, which positions the lifter 108 relative to the lower electrode 103A by fitting, thereby positioning the lifter 108 relative to the electrostatic chuck 104.
- the edge ring EA and cover ring CA supported by the lifter 108 are also positioned by this positioning.
- the edge ring EA may be attached by itself or simultaneously with the attachment of the cover ring CA.
- the process of placing the edge ring EA on the wafer support table 101 is performed, for example, as follows.
- the edge ring E in the storage module 61 is carried by the transfer robot 70 into the chamber 100 of the processing module 60 to which the edge ring EA is to be attached. Specifically, the edge ring EA in the storage module 61 is held by the forks 72 of the transfer robot 70. Next, the forks 72 holding the edge ring E are inserted into the chamber 100 of the processing module 60, which is the attachment target, through a load/unload port (not shown). Then, the edge ring EA is transferred by the forks 72 above the upper surface 104b of the peripheral portion of the electrostatic chuck 104. At this time, the cover ring CA is placed on the upper surface 105a of the support 105.
- the edge ring E is placed on the electrostatic chuck 104 by the transfer robot 70 . Specifically, all the lifters 108A are raised, and the edge ring EA is transferred from the forks 72 to the first engagement parts 108Aa of the lifters 108A that have passed through the through holes CA2 of the covering ring CA. At this time, the lifters 108A are raised until the tops of the first engagement parts 108Aa reach a predetermined height.
- the predetermined height here is a height at which the forks 72 do not interfere with the edge ring EA, covering ring CA, etc. when the forks 72 are inserted or removed between the covering ring CA placed on the support 105A and the edge ring EA supported by the first engagement parts 108Aa.
- the fork 72 is removed from the chamber 100. Also, the lifter 108A is lowered. As a result, the edge ring EA is placed on the upper surface 104b of the peripheral portion of the electrostatic chuck 104.
- the process of placing the edge ring EA on the wafer support table 101 is performed, for example, as follows.
- the covering ring CA supporting the edge ring EA in the storage module 61 is carried by the transport robot 70 into the chamber 100 of the processing module 60 to which the edge ring EA and the covering ring CA are to be attached.
- the covering ring CA supporting the edge ring EA in the storage module 61 is held by the fork 72 of the transport robot 70.
- the fork 72 holding the covering ring CA is inserted into the chamber 100 of the processing module 60 to be attached through a loading/unloading port (not shown).
- the covering ring CA supporting the edge ring EA is transported by the transport arm 71 above the upper surface 104b of the peripheral portion of the electrostatic chuck 104 and the upper surface 105Aa of the support 105A.
- edge ring EA and cover ring are then placed on the electrostatic chuck 104 and support 105A from the transfer robot 70.
- all lifters 108 are raised, and the edge ring E is transferred from the covering CA held by the fork 72 to the first engagement portion 108Aa of the lifter 108A that has passed through the through hole CA2 of the covering CA. After that, all lifters 108A continue to rise, and the covering CA is transferred from the fork 72 to the second engagement portion 108Ab of the lifter 108A. At this time, the lifter 108A is raised until the top of the second engagement portion 108Ab reaches a predetermined height.
- the predetermined height here is a height at which the fork 72 does not interfere with the covering CA when the fork 72 is inserted or removed between the upper surface 104a of the center of the electrostatic chuck 104 and the covering CA supported by the second engagement portion 108Ab.
- the fork 72 is then removed from the chamber 100.
- the lifter 108 is then lowered.
- the edge ring EA and the cover ring CA are placed on the upper surface 104b of the peripheral portion of the electrostatic chuck 104 and the upper surface 105Aa of the support 105A.
- the cover ring CA is first placed on the upper surface 105Aa of the support 105A, and then the edge ring EA is placed on the upper surface 104b of the peripheral portion of the electrostatic chuck 104.
- the edge ring may be configured as follows. That is, even if the edge ring is misaligned with respect to the lifter immediately after it is handed over to the lifter, it may be configured so that it moves (specifically, slides on the lifter) due to its own weight or the like and is positioned with respect to the lifter.
- the edge ring EB in FIG. 20 has recesses EB1 on its underside at positions corresponding to the lifters 108A, for positioning relative to the lifters 108A as described above.
- the recesses EB1 have a flared shape that widens downward. If the edge ring EB is misaligned relative to the lifters 108A immediately after being handed over to the lifters 108A, the edge ring EB moves relative to the lifters 108A so that the upper ends of the lifters 108A slide relatively along the concave surfaces that form the recesses EB1. This allows the edge ring EB to be positioned relative to the lifters 108A.
- the wafer support table 101B in FIG. 20 is used.
- the technology disclosed herein can also be applied when the wafer support table 101B in FIG. 20 is used.
- wafer support table 101B includes electrostatic chuck 104, lifter 107, and lifter 108A, as well as lower electrode 103B, support 105B, insulator 106B, and low thermal expansion material 170.
- the low thermal expansion material 170 is a plate-shaped member with a lower thermal expansion coefficient than the lower electrode 103B, and is made of, for example, ceramic.
- the lower electrode 103B is placed on the low thermal expansion material 170.
- the lower electrode 103 has a larger diameter than the electrostatic chuck 104 in a plan view.
- the lower electrode 103B has substantially the same diameter as the electrostatic chuck 104 in a plan view.
- the low thermal expansion material 170 is formed to have a larger diameter than the electrostatic chuck 104 in a plan view. That is, the low thermal expansion material 170 has an outer periphery 171 that does not overlap with the lower electrode 103B in a plan view.
- the support 105B formed in an annular shape in a plan view is placed on the outer periphery 171 of the low thermal expansion material 170. Further, an outer periphery 171 of the low thermal expansion material 170 is provided with a through hole 172 through which the lifter 108A is inserted. Furthermore, a sleeve member 180 is placed on the outer circumferential portion 171 of the low thermal expansion material 170 in correspondence with the through hole 172. The sleeve member 180 has a thermal expansion coefficient lower than that of the lower electrode 103B, similar to the low thermal expansion material 170. The sleeve member 180 has a fixing portion 181 and a sleeve body 182.
- the fixing portion 181 is fixed to the low thermal expansion material 170.
- the fixing portion 181 is formed to extend outward from the sleeve body 182, and is fixed to the low thermal expansion material 170 by a screw 190.
- the sleeve member 180 is fixed to the low thermal expansion material 170.
- the sleeve member 180 is fixed with a gap between it and the lower electrode 103B so that the thermally expanded lower electrode 103b does not come into contact with it.
- the sleeve body 182 has a through hole 182a into which the lifter 108A is inserted.
- the through hole 182a is connected to the through hole 172 of the low thermal expansion material 170.
- the engagement between the sleeve body 182 and the inserted lifter 108A positions the lifter 108A relative to the low thermal expansion material 170 to which the sleeve member 180 is fixed.
- a recess 105Bb is provided at a position corresponding to the through hole 172 in the support 105B.
- a sleeve member 180 and a screw 190 are housed in the recess 105Bb.
- the recess 105Bb is provided so that the lifter 108A inserted through the sleeve member 180 in the recess 105Bb can protrude above the support 105B.
- the recess 105Bb has an opening to the space above the support 105B, and the upper end of the sleeve member 180 is inserted into the opening.
- the insertion hole 119B through which the lifter 108A is inserted is formed by the through hole 172 in the low thermal expansion material 170, the through hole 182a in the sleeve member 180, and the recess 105Bb in the support 105B.
- the cover ring CA is placed on the upper surface 105Ba of the support 105B.
- the upper surface 105Ba of the support 105B and the upper surface of the lower electrode 103B are approximately the same height.
- the insulator 106B is a cylindrical member made of ceramic or the like, and supports the support 105B and the like by supporting the low thermal expansion material 170.
- the insulator 106B is formed, for example, to have an outer diameter equal to the outer diameter of the low thermal expansion material 170, and supports the peripheral portion of the low thermal expansion material 170.
- the sleeve member 180 is positioned relative to the electrostatic chuck 104 and fixed to the low thermal expansion material 170.
- the thermal expansion coefficients of the low thermal expansion material 170 and the sleeve member 180 are lower than that of the lower electrode 103B, and the sleeve member 180 is fixed to the lower electrode 103B with a gap therebetween as described above. Therefore, even at high temperatures, the positional relationship between the lifter 108 positioned on the sleeve member 180 and the electrostatic chuck 104 is not easily affected by the thermal expansion of the lower electrode 103B, etc. Therefore, the edge ring EB positioned relative to the lifter 108A can be accurately installed via the lifter 108A at an appropriate position based on the electrostatic chuck 104, even at high temperatures.
- the diameter of the lower electrode 103B in a plan view can be made smaller to a range larger than the diameter of the wafer W. This makes it possible to make the state of the plasma generated when a voltage is applied to the lower electrode 103B more uniform within the surface of the wafer W. Therefore, it is possible to obtain uniform plasma processing results within the surface of the wafer W.
- a recess similar to the recess EB1 of the edge ring EB may be provided on the underside of the edge ring.
- a downwardly recessed groove 104Cd may be formed in the upper surface 104Cb of the peripheral portion of the electrostatic chuck 104C in a ring shape in a plan view.
- Gas discharge holes 104c may be formed in the groove 104Cd. Specifically, one end of the gas discharge hole 104c may open into the groove 104Cd.
- a groove similar to the groove 104Cd may be provided on the upper surface of the peripheral portion of the electrostatic chuck.
- a substrate processing system comprising: A plasma processing apparatus, a reduced pressure transport apparatus connected to the plasma processing apparatus, and a control apparatus
- the plasma processing apparatus includes: A processing vessel configured to be decompressible; a substrate support table provided within the processing chamber, the substrate support table including a substrate mounting surface, a ring mounting surface on which an edge ring is mounted so as to surround the substrate mounting surface, and an electrostatic chuck that electrostatically attracts the edge ring to the ring mounting surface; a lifting mechanism for lifting and lowering the edge ring relative to the ring mounting surface; a supply path for supplying a gas between a rear surface of the edge ring and the ring mounting surface; a pressure sensor connected to the supply path; the reduced pressure transport device has a transport robot that transports the edge ring,
- the control device includes: lowering the edge ring, which has been transferred into the processing vessel by the transfer robot and handed over to the lifting mechanism, by the lifting mechanism to place the edge ring on the
- the electrostatic chuck includes a first electrode and a second electrode formed at different positions from each other, The substrate processing system according to (1), wherein the first electrode and the second electrode are configured to be applied with either voltages of different polarities or voltages of the same polarity.
- the plasma processing apparatus further includes a gas supply unit that discharges another gas into the processing chamber; The substrate processing system according to (1) or (2), wherein the step of placing the edge ring includes placing the edge ring on the ring placement surface while discharging the other gas into the processing vessel.
- the plasma processing apparatus further includes a plasma generating unit that generates plasma in the processing chamber, The substrate processing system according to any one of (1) to (3), wherein the electrostatic attraction step electrostatically attracts the edge ring while plasma is being generated in the processing chamber.
- the step of measuring the pressure includes measuring the pressure in the supply path after a predetermined time has elapsed since the supply of the gas in the step of supplying the gas is stopped;
- the substrate processing system of any one of (1) to (4), wherein the determining step determines the mounting state of the edge ring on the ring mounting surface based on whether the pressure of the supply path measured in the pressure measuring step is less than a threshold value.
- the transport robot includes: a holder configured to hold a substrate to be transported; a measuring unit provided to the holding unit and configured to measure information regarding an amount of misalignment of the edge ring with respect to the electrostatic chuck, When it is determined that the mounting state of the edge ring on the ring mounting surface is not appropriate, the control device A step of performing a measurement by the measurement unit; The substrate processing system according to any one of (1) to (5), further comprising: a step of calculating the amount of positional deviation of the edge ring based on a measurement result by the measurement unit.
- the adjusting step includes: releasing the electrostatic adsorption of the edge ring, raising the edge ring by the lifting mechanism, and then transferring the edge ring to the transfer robot; thereafter, moving the edge ring to a position based on the calculated amount of positional deviation;
- the substrate processing system described in (7) further includes a process of returning the edge ring to the lifting mechanism, and then lowering the edge ring by the lifting mechanism to place it on the ring mounting surface again.
- the transport robot includes: a holder configured to be able to hold an edge ring to be transported; a measuring unit provided to the holding unit and configured to measure information regarding an amount of misalignment of the edge ring with respect to the electrostatic chuck, When the control device determines that the mounting state of the edge ring on the ring mounting surface is appropriate, A step of performing a measurement by the measurement unit;
- the substrate processing system according to any one of (1) to (8), further comprising: a step of calculating the amount of positional deviation of the edge ring based on a measurement result by the measurement unit.
- control device further controls a process of adjusting the position of the edge ring on the ring mounting surface when the calculated positional deviation amount exceeds a threshold value.
- control device further controls a process of performing a process to stabilize electrostatic adsorption of the edge ring when the calculated positional deviation amount is equal to or less than a threshold value.
- control device further controls a process of performing a process to stabilize electrostatic adsorption of the edge ring when the mounting state of the edge ring on the ring mounting surface is determined to be appropriate.
- the plasma processing apparatus further includes an exhaust path for exhausting air between a rear surface of the edge ring and the ring mounting surface, The substrate processing system of any one of (1) to (13), wherein the control device further controls a process of vacuum-adsorbing the edge ring placed on the ring mounting surface before electrostatically adsorbing the edge ring placed on the ring mounting surface to the ring mounting surface.
- a substrate processing system comprising: A plasma processing apparatus, a reduced pressure transport apparatus connected to the plasma processing apparatus, and a control apparatus
- the plasma processing apparatus includes: A processing vessel configured to be decompressible; a substrate support table provided within the processing chamber, the substrate support table including a substrate mounting surface, a ring mounting surface on which an edge ring is mounted so as to surround the substrate mounting surface, and an electrostatic chuck that electrostatically attracts the edge ring to the ring mounting surface; a lifting mechanism for lifting and lowering the edge ring relative to the ring mounting surface; a supply path for supplying a gas between the rear surface of the edge ring and the ring mounting surface, the reduced pressure transport device has a transport robot that transports the edge ring, the transfer robot includes a holder configured to hold the edge ring to be transferred; a measuring unit provided to the holding unit and configured to measure information regarding an amount of misalignment of the edge ring with respect to the electrostatic chuck,
- the control device includes: lowering the edge ring, which has been
- the control device before the electrostatic attraction step, A step of performing a measurement by the measurement unit;
- the electrostatic chuck has a first electrode and a second electrode formed at different positions from each other, The substrate processing system according to (15) or (16), wherein the first electrode and the second electrode are configured to be supplied with voltages of opposite polarities and a voltage of the same polarity, respectively.
- the plasma processing apparatus further includes a gas supply unit that discharges another gas into the processing chamber, The substrate processing system according to any one of (15) to (17), wherein the placing step places the edge ring on the ring placement surface while discharging the other gas into the processing vessel.
- the plasma processing apparatus further includes a plasma generating unit that generates plasma in the processing chamber, The substrate processing system according to any one of (15) to (18), wherein the electrostatic attraction step electrostatically attracts the edge ring while plasma is being generated in the processing chamber.
- the substrate processing system according to any one of (15) to (20), wherein the control device further controls a process of performing a process to stabilize electrostatic adsorption of the edge ring when the calculated positional deviation amount is equal to or less than a threshold value.
- the plasma processing apparatus further includes an exhaust path for exhausting air between a rear surface of the edge ring and the ring mounting surface,
- Plasma processing system 50 Transfer module 60 Processing module 70 Transport robot 72 Fork 73 Measurement unit 80 Control device 100 Chamber 101, 101A, 101B, 101C Wafer support table 104 Electrostatic chuck 104a Central upper surface 104b Peripheral upper surface 104c Gas discharge holes 105a Upper surface 108, 108A Lifter 111 Electrode 111a Electrode 111b Electrode 134 Pressure sensor E, EA, EB Edge ring W Wafer
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Plasma & Fusion (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Drying Of Semiconductors (AREA)
- Robotics (AREA)
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2024549393A JPWO2024071073A1 (https=) | 2022-09-30 | 2023-09-26 | |
| CN202380044131.7A CN119325646A (zh) | 2022-09-30 | 2023-09-26 | 基片处理系统 |
| KR1020247039828A KR20250080840A (ko) | 2022-09-30 | 2023-09-26 | 기판 처리 시스템 |
| TW112137332A TW202431344A (zh) | 2022-09-30 | 2023-09-28 | 基板處理系統 |
| US18/976,345 US20250104979A1 (en) | 2022-09-30 | 2024-12-11 | Substrate processing system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022157625 | 2022-09-30 | ||
| JP2022-157625 | 2022-09-30 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/976,345 Continuation US20250104979A1 (en) | 2022-09-30 | 2024-12-11 | Substrate processing system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024071073A1 true WO2024071073A1 (ja) | 2024-04-04 |
Family
ID=90478007
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/034825 Ceased WO2024071073A1 (ja) | 2022-09-30 | 2023-09-26 | 基板処理システム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20250104979A1 (https=) |
| JP (1) | JPWO2024071073A1 (https=) |
| KR (1) | KR20250080840A (https=) |
| CN (1) | CN119325646A (https=) |
| TW (1) | TW202431344A (https=) |
| WO (1) | WO2024071073A1 (https=) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7719781B2 (ja) * | 2020-01-23 | 2025-08-06 | ラム リサーチ コーポレーション | 自動回転プリアライメントを用いたエッジリング搬送 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010183074A (ja) * | 2003-04-24 | 2010-08-19 | Tokyo Electron Ltd | プラズマ処理装置、フォーカスリング及び被処理体の載置装置 |
| JP2019534571A (ja) * | 2016-11-03 | 2019-11-28 | ラム リサーチ コーポレーションLam Research Corporation | 静電気的にクランプされたエッジリング |
| US20200013657A1 (en) * | 2018-07-04 | 2020-01-09 | Samsung Electronics Co., Ltd. | Apparatus and methods for edge ring replacement, inspection and alignment using image sensors |
| JP2021010026A (ja) * | 2020-10-15 | 2021-01-28 | 東京エレクトロン株式会社 | 基板処理装置及び基板処理方法 |
| JP2022069274A (ja) * | 2020-10-23 | 2022-05-11 | 東京エレクトロン株式会社 | 処理システム及び処理方法 |
| WO2022138847A1 (ja) * | 2020-12-25 | 2022-06-30 | 東京エレクトロン株式会社 | メンテナンス装置、真空処理システム及びメンテナンス方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020144786A1 (en) * | 2001-04-05 | 2002-10-10 | Angstron Systems, Inc. | Substrate temperature control in an ALD reactor |
| US20040261946A1 (en) * | 2003-04-24 | 2004-12-30 | Tokyo Electron Limited | Plasma processing apparatus, focus ring, and susceptor |
| JP6635888B2 (ja) | 2016-07-14 | 2020-01-29 | 東京エレクトロン株式会社 | プラズマ処理システム |
| US10923385B2 (en) * | 2016-11-03 | 2021-02-16 | Lam Research Corporation | Carrier plate for use in plasma processing systems |
| TWM588883U (zh) * | 2019-05-10 | 2020-01-01 | 美商蘭姆研究公司 | 半導體製程模組的中環 |
-
2023
- 2023-09-26 JP JP2024549393A patent/JPWO2024071073A1/ja active Pending
- 2023-09-26 WO PCT/JP2023/034825 patent/WO2024071073A1/ja not_active Ceased
- 2023-09-26 KR KR1020247039828A patent/KR20250080840A/ko active Pending
- 2023-09-26 CN CN202380044131.7A patent/CN119325646A/zh active Pending
- 2023-09-28 TW TW112137332A patent/TW202431344A/zh unknown
-
2024
- 2024-12-11 US US18/976,345 patent/US20250104979A1/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010183074A (ja) * | 2003-04-24 | 2010-08-19 | Tokyo Electron Ltd | プラズマ処理装置、フォーカスリング及び被処理体の載置装置 |
| JP2019534571A (ja) * | 2016-11-03 | 2019-11-28 | ラム リサーチ コーポレーションLam Research Corporation | 静電気的にクランプされたエッジリング |
| US20200013657A1 (en) * | 2018-07-04 | 2020-01-09 | Samsung Electronics Co., Ltd. | Apparatus and methods for edge ring replacement, inspection and alignment using image sensors |
| JP2021010026A (ja) * | 2020-10-15 | 2021-01-28 | 東京エレクトロン株式会社 | 基板処理装置及び基板処理方法 |
| JP2022069274A (ja) * | 2020-10-23 | 2022-05-11 | 東京エレクトロン株式会社 | 処理システム及び処理方法 |
| WO2022138847A1 (ja) * | 2020-12-25 | 2022-06-30 | 東京エレクトロン株式会社 | メンテナンス装置、真空処理システム及びメンテナンス方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20250080840A (ko) | 2025-06-05 |
| TW202431344A (zh) | 2024-08-01 |
| US20250104979A1 (en) | 2025-03-27 |
| JPWO2024071073A1 (https=) | 2024-04-04 |
| CN119325646A (zh) | 2025-01-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12094696B2 (en) | Focus ring replacement method and plasma processing system | |
| JP7454976B2 (ja) | 基板支持台、プラズマ処理システム及びエッジリングの交換方法 | |
| JP7534249B2 (ja) | プラズマ処理システム及び環状部材の取り付け方法 | |
| JP7550603B2 (ja) | プラズマ処理システム及びエッジリングの交換方法 | |
| US12394605B2 (en) | Plasma processing system and edge ring replacement method | |
| KR102554014B1 (ko) | 저온 식각 방법 및 플라즈마 식각 장치 | |
| JP7534048B2 (ja) | プラズマ処理システム及びプラズマ処理方法 | |
| US20210319988A1 (en) | Substrate support stage, plasma processing system, and method of mounting edge ring | |
| US20250336656A1 (en) | Plasma processing system, plasma processing apparatus, and method for replacing edge ring | |
| JP2024111104A (ja) | 基板処理システム | |
| WO2022163408A1 (ja) | 基板処理システム及び状態監視方法 | |
| JP7769538B2 (ja) | 基板支持台及びリングの交換方法 | |
| US20250104979A1 (en) | Substrate processing system | |
| US20250226189A1 (en) | Substrate treatment system | |
| JP7585560B2 (ja) | 基板処理システム及びエッジリングの取り付け方法 | |
| JP7804830B2 (ja) | プラズマ処理システム及び環状部材の高さの推定方法 | |
| JP2022135646A (ja) | 基板支持台及びプラズマ処理装置 | |
| CN121439659A (zh) | 衬底处理设备和调整环构件高度的方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23872296 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024549393 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202380044131.7 Country of ref document: CN |
|
| WWP | Wipo information: published in national office |
Ref document number: 202380044131.7 Country of ref document: CN |
|
| WWP | Wipo information: published in national office |
Ref document number: 1020247039828 Country of ref document: KR |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 23872296 Country of ref document: EP Kind code of ref document: A1 |