WO2024053242A1 - 血流測定用光プローブ、および内視鏡 - Google Patents
血流測定用光プローブ、および内視鏡 Download PDFInfo
- Publication number
- WO2024053242A1 WO2024053242A1 PCT/JP2023/025718 JP2023025718W WO2024053242A1 WO 2024053242 A1 WO2024053242 A1 WO 2024053242A1 JP 2023025718 W JP2023025718 W JP 2023025718W WO 2024053242 A1 WO2024053242 A1 WO 2024053242A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- optical fiber
- tube
- fixing member
- probe
- blood flow
- Prior art date
Links
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/012—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor
- A61B1/018—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor for receiving instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording for evaluating the cardiovascular system, e.g. pulse, heart rate, blood pressure or blood flow
- A61B5/026—Measuring blood flow
Definitions
- the present invention relates to an optical probe for measuring blood flow and an endoscope.
- Non-Patent Document 1 discloses an optical probe for measuring blood flow ( Hereinafter, a probe) is disclosed.
- the reflecting member reflects the light emitted from the first optical fiber toward the side of the probe, and irradiates the reflected light onto a tissue (target tissue) that is a target for blood flow measurement. Further, the reflecting member reflects the light returned from the target tissue due to scattering toward the second optical fiber.
- the amount of blood flow flowing inside the target tissue is determined. etc. can be measured.
- the positioning of the reflecting member with respect to the first optical fiber and the second optical fiber is performed by pasting the reflecting member (flat mirror) on the slope of the fixed member.
- the accuracy of the positioning depends on the accuracy of manufacturing the slope to which the reflective member is attached. Therefore, in order to perform highly accurate positioning, it is necessary to form slopes with high accuracy on the fixed member. This has increased the labor required to manufacture the probe.
- the present invention has been made in consideration of such circumstances, and an object of the present invention is to provide an optical probe for measuring blood flow and an endoscope that can easily position a reflecting member with respect to an optical fiber.
- an optical probe for blood flow measurement includes a tube, a fixing member inserted into the tube and fixed to the inner circumferential surface of the tube, and a fixing member attached to the fixing member.
- the reflecting member by fitting the reflecting member into the fitting recess, the reflecting member can be positioned with respect to the first optical fiber and the second optical fiber. Therefore, the reflecting member can be easily positioned with respect to the optical fiber.
- a second aspect of the present invention is the optical probe for blood flow measurement according to aspect 1, in which the fixing member communicates with the fitting recess, accommodates the first optical fiber, and fixes the first optical fiber. and a second housing groove communicating with the fitting recess, housing the second optical fiber, and fixing the second optical fiber.
- the reflecting member is a right-angled prism.
- the first optical fiber and the second optical fiber are arranged such that the first optical fiber and the second optical fiber are connected to the inner circumferential surface of the tube. They are arranged at intervals in a direction intersecting the longitudinal direction.
- a fifth aspect of the present invention is the optical probe for blood flow measurement according to any one of aspects 1 to 4, wherein the optical probe for blood flow measurement is inserted into the tube, fixed to the fixing member, and It further includes a longitudinally extending torque coil.
- the optical probe for blood flow measurement has an X-ray opacity higher than that of the fixing member.
- the marker member further includes an impermeable marker member.
- an endoscope according to aspect 7 of the present invention includes the optical probe for blood flow measurement according to any one of aspects 1 to 6, and a main body portion having a forceps port through which the optical probe for blood flow measurement is inserted. , is provided.
- an optical probe for measuring blood flow and an endoscope that allow easy positioning of a reflecting member with respect to an optical fiber.
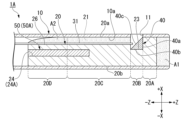
- FIG. 1 is a plan view showing a probe according to a first embodiment of the present invention.
- 2 is a sectional view taken along line II-II in FIG. 1.
- FIG. FIG. 1 is a perspective view showing a fixing member according to a first embodiment of the present invention.
- FIG. 7 is a diagram showing an example of an endoscope using a probe according to a second embodiment of the present invention. It is a top view which shows the probe based on 2nd Embodiment of this invention. 6 is a sectional view taken along line VV in FIG. 5.
- FIG. FIG. 7 is a perspective view showing a fixing member according to a second embodiment of the present invention. It is a figure showing other examples of the endoscope using the probe concerning a 2nd embodiment of the present invention.
- the blood flow measurement optical probe 1A includes a tube 10, a fixing member 20, a first optical fiber 31, a second optical fiber 32, a reflecting member 40, and a marker member 50. and.
- the tube 10 has a central axis O.
- the first optical fiber 31 and the second optical fiber 32 extend in a direction parallel to the central axis O of the tube 10.
- the first optical fiber 31 and the reflecting member 40 face each other in the direction in which the first optical fiber 31 extends (direction parallel to the central axis O of the tube 10).
- the blood flow measuring optical probe 1A may be simply referred to as "probe 1A".
- the direction from the first optical fiber 31 toward the reflecting member 40 in parallel with the central axis O of the tube 10 is referred to as the front side or the tip side, and is represented by the +Z direction in the drawings.
- the direction opposite to the front is called the rear or proximal side, and is represented by the ⁇ Z direction in the figures.
- the front (+Z direction) and the rear (-Z direction) are not particularly distinguished, they are referred to as the longitudinal direction Z or the axial direction Z.
- a cross section perpendicular to the longitudinal direction Z is referred to as a cross section.
- the direction perpendicular to the central axis O of the tube 10 when viewed from the longitudinal direction Z is referred to as the radial direction.
- the direction approaching the center axis O is called the radially inner side
- the direction away from the center axis O is called the radially outer side.
- the direction of rotation around the central axis O when viewed from the longitudinal direction Z is referred to as the circumferential direction.
- one direction perpendicular to the longitudinal direction Z is referred to as the left side, and is represented by a +Y direction in the figure.
- the direction opposite to the left is called the right and is represented by the -Y direction in the figure. If there is no particular distinction between the left side (+Y direction) and the right side (-Y direction), they will be referred to as a first direction Y.
- a cross section perpendicular to the first direction Y is referred to as a longitudinal cross section.
- One direction perpendicular to both the longitudinal direction Z and the first direction Y is referred to as upward, and is represented by the +X direction in the figure.
- the direction opposite to the upward direction is called the downward direction, and is indicated by the -X direction in the figure. If the upper direction (+X direction) and the lower direction ( ⁇ X direction) are not particularly distinguished, they will be referred to as the second direction X.
- the tube 10 is a cylindrical elastic member extending in the longitudinal direction Z.
- the material of the tube 10 is preferably a material with high biocompatibility.
- the tube 10 according to this embodiment is a so-called nasogastric tube.
- the tip (front end) of the tube 10 is chamfered. This makes it difficult for the tube 10 to damage tissue within the living body.
- the outer diameter of the tube 10 is, for example, about 14 to 18 Fr (4.7 to 6.0 mm).
- the inner diameter of the tube 10 is, for example, about 3.1 to 3.9 mm.
- a light-transmitting portion 11 is provided in a portion of the tube 10 that faces the reflecting member 40 in the radial direction (second direction X in this embodiment).
- the light transmitting portion 11 is configured to transmit both the light emitted from the first optical fiber 31 and the light entering the second optical fiber 32.
- the light-transmitting portion 11 is a through hole that opens in the outer circumferential surface of the tube 10 and extends to the inner circumferential surface 10a of the tube 10.
- the transparent portion 11 does not have to be a through hole.
- the light-transmitting portion 11 may be, for example, a portion formed of a transparent material (resin, etc.).
- the fixing member 20 is inserted into the tube 10 and fixed to the inner peripheral surface 10a of the fixing member 20. Specifically, the fixing member 20 is fixed to the inner circumferential surface 10a of the fixing member 20 by the elastic restoring force of the tube 10 directed inward in the radial direction and the adhesive force of the adhesive A1 (details will be described later). .
- the fixing member 20 has the role of holding the optical fibers 31 and 32 and the reflecting member 40 and positioning the reflecting member 40 with respect to the optical fibers 31 and 32.
- the outer circumferential surface (the surface facing outward in the radial direction) of the fixing member 20 includes a first curved surface 20a, a second curved surface 20b, a first flat surface 20c, and a second flat surface. 20d (see also FIGS. 1 and 2).
- the first curved surface 20a, the first flat surface 20c, the second curved surface 20b, and the second flat surface 20d are arranged in this order in the circumferential direction.
- the first curved surface 20a and the second curved surface 20b have an arcuate shape when viewed in cross section.
- the first curved surface 20a faces upward.
- the second curved surface 20b faces downward.
- the first flat surface 20c and the second flat surface 20d have a linear shape extending in the second direction X when viewed in cross section.
- the first flat surface 20c faces leftward.
- the second flat surface 20d faces to the right.
- the fixing member 20 includes a distal end portion 20A, a fitting portion 20B, a housing portion 20C, and a rear end portion 20D.
- the distal end portion 20A, the fitting portion 20B, the accommodating portion 20C, and the rear end portion 20D are lined up in this order from the front to the rear ( ⁇ Z direction) and are adjacent to each other.
- the tip portion 20A, the fitting portion 20B, the housing portion 20C, and the rear end portion 20D are integrally formed of the same material.
- the material of the fixing member 20 (the distal end portion 20A, the fitting portion 20B, the accommodating portion 20C, and the rear end portion 20D) is preferably a material with high biocompatibility.
- medical PEEK polyetheretherketone
- the fitting portion 20B is a portion of the fixing member 20 in which the fitting recess 23 is formed.
- the fitting recess 23 according to this embodiment has a rectangular shape in a longitudinal cross-sectional view.
- the reflective member 40 is fitted into the fitting recess 23 .
- the fitting recess 23 according to this embodiment is open to a first curved surface 20a, a first flat surface 20c, and a second flat surface 20d.
- the accommodating portion 20C is a portion of the fixing member 20 in which the first accommodating groove 21 and the second accommodating groove 22 are formed.
- the first optical fiber 31 is accommodated in the first accommodation groove 21.
- the second optical fiber 32 is accommodated in the second accommodation groove 22 .
- each of the first accommodation groove 21 and the second accommodation groove 22 is a groove that opens in the first curved surface 20a and extends in the longitudinal direction Z.
- the first housing groove 21 and the second housing groove 22 are spaced apart from each other in the first direction Y.
- the first housing groove 21 is located to the left (+Y side) of the second housing groove 22 . Further, the front end of the first housing groove 21 and the front end of the second housing groove 22 communicate with the fitting recess 23 .
- the rear end portion 20D is a portion of the fixing member 20 that is located rearward of the accommodating portion 20C (the first accommodating groove 21 and the second accommodating groove 22).
- a first curved surface 20a, a first flat surface 20c, a second flat surface 20d, and a cut-off recess 26 that opens to the rear surface of the fixing member 20 are formed in the rear end portion 20D according to the present embodiment.
- the cut recess 26 communicates with the rear end of the first housing groove 21 and the rear end of the second housing groove 22 .
- the tip portion 20A is a portion of the fixing member 20 that is located forward of the fitting portion 20B (fitting recess 23).
- the tip portion 20A according to this embodiment does not have the above-mentioned recesses or grooves.
- the front surface of the fixing member 20 (distal end portion 20A) is located behind the distal end of the tube 10.
- a space surrounded by the inner circumferential surface 10a of the tube 10 and the front surface of the fixing member 20 (tip portion 20A) is filled with adhesive A1.
- Adhesive A1 adheres the fixing member 20 (tip portion 20A) to the inner circumferential surface 10a of the tube 10.
- the adhesive A1 it is preferable to use an adhesive with high biocompatibility.
- a pair of marker recesses 24 including a first marker recess 24A and a second marker recess 24B are formed in the fixing member 20 according to the present embodiment (first marker recess 24A (only shown).
- first marker recess 24A is open to the rear surface of the fixing member 20 and the first flat surface 20c.
- the second marker recess 24B according to this embodiment is open to the rear surface of the fixing member 20 and the second flat surface 20d.
- a marker member 50 is accommodated in each marker recess 24A, 24B (see FIG. 2).
- each marker recess 24A, 24B extends forward from the rear end of the fixing member 20 (rear end 20D), and the tip of each marker recess 24A, 24B is connected to the accommodating part 20C. (see Figures 2 and 3).
- the first optical fiber 31 has a core (not shown) and a cladding (not shown) that covers the core.
- the second optical fiber 32 also has a core and a cladding.
- a laser blood flow meter is connected to the base end of each optical fiber 31, 32 according to this embodiment.
- the first optical fiber 31 propagates the light input from the laser blood flow meter to the tip of the first optical fiber 31, and emits it forward from the tip of the first optical fiber 31.
- the second optical fiber 32 propagates the light input from the tip of the second optical fiber 32 to the base end of the second optical fiber 32, and inputs the light into the laser blood flow meter.
- the first optical fiber 31 is accommodated in the first accommodation groove 21 of the fixing member 20 (see FIG. 1).
- the second optical fiber 32 is accommodated in the second accommodation groove 22 of the fixing member 20 (see FIG. 1).
- the first optical fiber 31 is fixed to the first housing groove 21 by adhesive A2 filled in the first housing groove 21.
- the second optical fiber 32 is fixed to the second accommodation groove 22 by the adhesive A2 filled in the second accommodation groove 22.
- the adhesive A2 it is preferable to use an adhesive with high biocompatibility.
- the first optical fibers 31 are arranged at intervals from the inner circumferential surface 10a of the tube 10 in a direction (radial direction) intersecting the longitudinal direction Z. In other words, there is a gap between the first optical fiber 31 and the inner circumferential surface 10a of the tube 10 in the direction (radial direction) intersecting the longitudinal direction Z. In other words, the first optical fiber 31 is not in contact with the inner peripheral surface 10a of the tube 10.
- the second optical fibers 32 are also arranged at intervals in the direction (radial direction) intersecting the longitudinal direction Z with respect to the inner peripheral surface 10a of the tube 10.
- the second optical fiber 32 there is a gap between the second optical fiber 32 and the inner circumferential surface 10a of the tube 10 in the direction (radial direction) intersecting the longitudinal direction Z.
- the second optical fiber 32 is not in contact with the inner peripheral surface 10a of the tube 10.
- the first optical fiber 31 according to the present embodiment protrudes forward from the first accommodation groove 21, and the tip of the first optical fiber 31 is located within the fitting recess 23. do.
- the second optical fiber 32 according to the present embodiment protrudes forward from the second accommodation groove 22 , and the tip of the second optical fiber 32 is located within the fitting recess 23 .
- the reflecting member 40 according to this embodiment is a right-angled prism made of quartz glass. That is, as shown in FIG. 2, the reflecting member 40 has a triangular prism shape that is a right isosceles triangle when viewed in longitudinal section. Specifically, the reflecting member 40 according to this embodiment has a first surface 40a, a second surface 40b, and a third surface (slope) 40c.
- the first surface 40a is a surface extending in the second direction X when viewed in longitudinal section.
- the second surface 40b is a surface extending rearward from the lower end of the first surface 40a when viewed in longitudinal section. Further, the dimension of the first surface 40a in the second direction X and the dimension of the second surface 40b in the longitudinal direction Z are substantially equal to each other.
- the third surface 40c is a surface connecting the upper end of the first surface 40a and the rear end of the second surface 40b. In a longitudinal cross-sectional view, the angle between the third surface 40c and the first surface 40a and the angle between the third surface 40c and the second surface 40b are both approximately 45 degrees. Note that in this specification, the expression “approximately 45°” includes cases where the angles can be considered to be equal if manufacturing errors are removed.
- the third surface 40c according to this embodiment is coated with metal. The third surface 40c functions as a reflective surface that reflects light.
- the reflective member 40 is arranged in the fitting recess such that the first surface 40a is in contact with the front surface of the fitting recess 23, and the second surface 40b is in contact with the lower surface of the fitting recess 23. 23 is fitted.
- the reflective member 40 may be adhesively fixed to the fitting recess 23 .
- the third surface 40c of the reflecting member 40 faces the first optical fiber 31 and the second optical fiber 32 in the longitudinal direction Z. .
- the reflecting member 40 (third surface 40c) reflects the light emitted from the first optical fiber 31 in a direction intersecting the longitudinal direction Z (for example, in the radial direction).
- the reflecting member 40 (third surface 40c) reflects light incident from a direction intersecting the longitudinal direction Z (for example, the radial direction) toward the second optical fiber 32. That is, by fitting the fitting recess 23 into the reflecting member 40, the reflecting member 40 can be positioned with respect to the optical fibers 31 and 32.
- the marker member 50 is a member having higher X-ray opacity than that of the fixing member 20. Thereby, when the probe 1A is inserted into the living body, the position and orientation of the probe 1A in the living body can be confirmed by performing X-ray fluoroscopy.
- the material of the marker member 50 platinum, gold, etc. can be used, for example.
- the probe 1A according to the present embodiment includes a first marker member 50A accommodated in the first marker recess 24A and a second marker member 50B accommodated in the second marker recess 24B. Be prepared.
- the first marker member 50A is adhesively fixed to the first marker recess 24A.
- the second marker member 50B is adhesively fixed to the second marker recess 24B.
- the probe 1A may include one or more marker members 50. Alternatively, the probe 1A may not include the marker member 50.
- the laser blood flow meter described above transmits a predetermined light to the first optical fiber 31. Output.
- the output light propagates through the first optical fiber 31 and is emitted forward from the tip of the first optical fiber 31. Then, the emitted light is reflected radially outward by the third surface 40c of the reflecting member 40, passes through the light-transmitting portion 11, and is irradiated onto the target tissue outside the probe 1A. The irradiated light is then scattered within the target tissue and returns to the probe 1A.
- the laser blood flow meter can measure the amount of blood flow flowing through the target tissue by analyzing the light output to the first optical fiber 31 and the light input from the second optical fiber 32. Specifically, the laser blood flow meter measures the blood flow in the target tissue using the frequency difference and intensity difference between the light output to the first optical fiber 31 and the light input to the second optical fiber 32. It may be configured as follows.
- the reflecting member 40 can be positioned with respect to each optical fiber 31, 32. Therefore, compared to a configuration in which the reflective member is attached to the slope of the fixing member, as described in Non-Patent Document 1, for example, the positioning of the reflective member 40 with respect to each optical fiber 31, 32 is easier. It can be carried out.
- the optical fibers 31 and 32, the reflective member 40, and the marker member 50 are fixed to the fixing member 20, and then the fixing member 20 is inserted into the tube 10. do it. Therefore, compared to, for example, the probe described in Non-Patent Document 1, the labor required to assemble the probe 1A can be reduced.
- the reason why the outer circumferential surface of the fixing member 20 is not circular in cross-sectional view and is provided with the first flat surface 20c and the second flat surface 20d is to reduce the contact area between the fixing member 20 and the tube 10. This is to suppress frictional resistance. This makes it easier to insert the fixing member 20 into the tube 10.
- the probe 1A includes the tube 10, the fixing member 20 inserted into the tube 10 and fixed to the inner peripheral surface 10a of the tube 10, and the first probe 1A fixed to the fixing member 20.
- the optical fiber 31, the second optical fiber 32 fixed to the fixing member 20, and the light emitted from the first optical fiber 31 are reflected in a direction intersecting the longitudinal direction Z, and the light emitted from the first optical fiber 31 is reflected in a direction intersecting the longitudinal direction Z.
- the fixing member 20 includes a reflecting member 40 that reflects light incident from the direction toward the second optical fiber 32, and the fixing member 20 has a fitting recess 23 into which the reflecting member 40 is fitted.
- the reflecting member 40 can be positioned with respect to the first optical fiber 31 and the second optical fiber 32. Therefore, the reflecting member 40 can be easily positioned with respect to the optical fibers 31 and 32.
- the fixing member 20 communicates with the fitting recess 23, the first optical fiber 31 is accommodated, and the first accommodation groove 21, to which the first optical fiber 31 is fixed, communicates with the fitting recess 23, and the second It has a second accommodation groove 22 in which the optical fiber 32 is accommodated and to which the second optical fiber 32 is fixed.
- the reflecting member 40 is a right angle prism. With this configuration, the angle of the reflective surface (third surface 40c) that reflects light is greater than the configuration in which the reflective member is attached to the slope of the fixed member as described in Non-Patent Document 1, for example. decisions can be made more easily.
- first optical fiber 31 and the second optical fiber 32 are arranged with an interval between them in the direction intersecting the longitudinal direction Z with respect to the inner circumferential surface 10a of the tube 10.
- light emitted from an optical fiber diffuses radially outward in the radial direction as it moves away from the optical fiber.
- the distance in the radial direction between the optical fibers 31 and 32 and the outer peripheral surface of the tube 10 is set to 2.5 mm or more.
- the diameter of the blood flow measurement range in the target tissue that comes into contact with the outer peripheral surface of the tube 10 can be set to 1.63 mm or more.
- the probe 1A according to the present embodiment further includes a marker member 50 having higher X-ray opacity than that of the fixing member 20.
- the probe (optical probe for blood flow measurement) 1B is used as a component constituting the endoscope 3.
- the endoscope 3 includes a main body portion 2 having a forceps port 2a, and a probe 1B inserted through the forceps port 2a.
- the probe 1B protrudes from the tip of the main body 2 and measures blood flow in the target tissue T (for example, the gastrointestinal tract, etc.).
- the endoscope 3 may include components (for example, a camera, etc.) other than the main body 2 and the probe 1B.
- the outer diameter of the tube 10 according to this embodiment is smaller than the outer diameter of the tube 10 according to the first embodiment.
- the outer diameter of the tube 10 according to this embodiment is, for example, about 1.854 to 2.489 mm.
- the inner diameter of the tube 10 according to this embodiment is, for example, about 1.930 to 2.591 mm.
- the inner diameter of the forceps mouth 2a is, for example, about 2.2 to 2.8 mm.
- the material of the tube 10 is preferably a material with high biocompatibility.
- the material of the tube 10 for example, PI (polyimide), PTFE (polytetrafluoroethylene), etc. can be used.
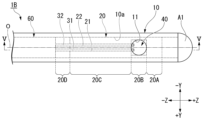
- the adhesive A1 for bonding the fixing member 20 and the tube 10 projects semispherically from the tip of the tube 10. This makes it difficult for the tip of the tube 10 (the tip of the probe 1B) to damage tissue within the living body.
- the probe 1B according to the present embodiment does not include the marker member 50 but includes a torque coil 60 inserted into the tube 10.
- the shape of the fixing member 20 is different between the probe 1B according to this embodiment and the probe 1A according to the first embodiment.
- the outer circumferential surface of the fixing member 20 according to this embodiment does not include a flat surface as in the first embodiment, but is circular in cross-sectional view.
- the fixing member 20 according to the present embodiment has an extending portion 25 extending rearward from the rear surface of the fixing member 20. As shown in FIG. 6, the extending portion 25 is inserted into the torque coil 60.
- the torque coil 60 is fixed to the rear end portion 20D of the fixing member 20 by the clamping force of the inner circumferential surface 10a of the tube 10 and the extension portion 25, and the adhesive force of the adhesive A2.
- the torque coil 60 is a cylindrical member extending in the longitudinal direction Z.
- the torque coil 60 is a member that has higher rigidity than the tube 10 and has better torque transmission force and rotational synchronization than the tube 10.
- the "torque transmission force” is an index representing the difficulty of attenuating the torque when transmitting the torque around the central axis O applied to the proximal end of the probe 1B to the distal end of the probe 1B.
- rotation synchronism is an index representing the degree of coincidence between the rotation angle of the base end of the probe 1B and the rotation angle of the tip end of the probe 1B.
- the torque coil 60 according to this embodiment has a structure in which three stainless steel coils are laminated in three concentric layers. In the torque coil 60, the winding direction of the coil in the innermost layer and the outermost layer and the winding direction of the coil in the middle layer are opposite to each other.
- the movement of the probe 1B can be easily controlled even if the tube 10 is thin (thin) and soft. can.
- the operation performed by a human such as a doctor (or a machine such as a medical robot) on the proximal end of the probe 1B is accurately transmitted to the tip of the probe 1B, making it easy to cause the tip of the probe 1B to perform the desired operation.
- the reflection member 40 in the probe 1B according to the present embodiment as well, similarly to the probe 1A according to the first embodiment, by fitting the reflection member 40 into the fitting recess 23, the first optical fiber 31 and the second optical fiber 32 The reflecting member 40 can be positioned with respect to. Therefore, also in the probe 1B according to this embodiment, the reflecting member 40 can be easily positioned with respect to the optical fibers 31 and 32.
- the probe 1B according to the present embodiment further includes a torque coil 60 that is inserted into the tube 10, fixed to the fixing member 20, and extends in the longitudinal direction Z.
- the reflecting member 40 is a right-angled prism made of quartz glass, but the reflecting member 40 may be made of transparent resin or the like. Further, the entire reflecting member 40 may be formed of a metal material. In this case, the third surface 40c does not need to be coated with metal. Further, the shape of the reflecting member 40 is not limited to a triangular prism. If the reflective member 40 can reflect light and the reflective member 40 can be positioned with respect to the optical fibers 31 and 32 by fitting the reflective member 40 into the fitting recess 23, the material of the reflective member 40 and The shape or the shape of the fitting recess 23 can be changed as appropriate. Similarly, the shapes of the first housing groove 21 and the second housing groove 22 can be changed as appropriate.
- first optical fiber 31 or the second optical fiber 32 may be in contact with the inner peripheral surface 10a of the tube 10.
- the tip of the probe 1B may be configured to be bendable in the longitudinal direction of the endoscope 3. In this case, the probe 1B can be brought closer to the target tissue T and blood flow can be measured with higher accuracy.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Veterinary Medicine (AREA)
- Pathology (AREA)
- Public Health (AREA)
- Biophysics (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Optics & Photonics (AREA)
- Hematology (AREA)
- Cardiology (AREA)
- Physiology (AREA)
- Endoscopes (AREA)
Abstract
血流測定用光プローブは、チューブと、固定部材と、第1光ファイバと、第2光ファイバと、反射部材と、を備える。前記固定部材は、前記チューブに挿入され、前記チューブの内周面に固定される。前記第1光ファイバは、前記固定部材に固定される。前記第2光ファイバは、前記固定部材に固定される。前記反射部材は、前記第1光ファイバから出射された光を前記チューブの長手方向と交差する方向に向けて反射するとともに、前記チューブの長手方向と交差する方向から入射してきた光を前記第2光ファイバに向けて反射する。前記固定部材は、前記反射部材が嵌合される嵌合凹部を有する。
Description
本発明は、血流測定用光プローブ、および内視鏡に関する。
本願は、2022年9月7日に、日本に出願された特願2022-141902号に基づき優先権を主張し、その内容をここに援用する。
本願は、2022年9月7日に、日本に出願された特願2022-141902号に基づき優先権を主張し、その内容をここに援用する。
非特許文献1には、チューブと、チューブに固定される固定部材と、当該固定部材に固定された第1光ファイバおよび第2光ファイバと、反射部材と、を備える血流測定用光プローブ(以下、プローブ)が開示されている。反射部材は、第1光ファイバから出射された光をプローブの側方に向けて反射し、当該反射光を血流測定の対象となる組織(対象組織)に照射する。また、反射部材は、散乱により対象組織から返ってきた光を第2光ファイバに向けて反射する。第1光ファイバから出射された光と、対象組織に散乱されて第2光ファイバに戻ってきた光とをレーザー血流計を用いて分析することで、対象組織の内部を流れる血流の量等を測定することができる。
Shintaro Katahira, Shunsuke Kawamoto, Naoki Masaki, Yukihiro Hayatsu, Tadao Matsunaga, Yoichi Haga, Yoshikatsu Saiki, Oesophageal mucosal blood flow changes after thoracic endovascular stent graft implantation using a novel sensor probe, Interactive CardioVascular and Thoracic Surgery, Volume 26, Issue 3, March 2018, Pages 487-493, https://doi.org/10.1093/icvts/ivx351
ところで、例えば非特許文献1に記載のプローブにおいては、固定部材が有する斜面に反射部材(平板状のミラー)を貼り付けることにより、第1光ファイバおよび第2光ファイバに対する反射部材の位置決めが行われていた。ここで、当該位置決めの精度は、反射部材が貼り付けられる斜面の製造の精度に依存する。このため、精度の高い位置決めを行うためには、固定部材上に精度よく斜面を形成する必要がある。これにより、プローブの製造にかかる労力が増大していた。
本発明は、このような事情を考慮してなされ、光ファイバに対する反射部材の位置決めを容易に行うことができる血流測定用光プローブ、および内視鏡を提供することを目的とする。
上記課題を解決するために、本発明の態様1に係る血流測定用光プローブは、チューブと、前記チューブに挿入され、前記チューブの内周面に固定される固定部材と、前記固定部材に固定された第1光ファイバと、前記固定部材に固定された第2光ファイバと、前記第1光ファイバから出射された光を前記チューブの長手方向と交差する方向に向けて反射するとともに、前記チューブの長手方向と交差する方向から入射してきた光を前記第2光ファイバに向けて反射する反射部材と、を備え、前記固定部材は、前記反射部材が嵌合される嵌合凹部を有する。
本発明の態様1によれば、反射部材を嵌合凹部に嵌め合わせることにより、第1光ファイバおよび第2光ファイバに対する反射部材の位置決めを行うことができる。したがって、光ファイバに対する反射部材の位置決めを容易に行うことができる。
また、本発明の態様2は、態様1の血流測定用光プローブにおいて、前記固定部材は、前記嵌合凹部に連通し、前記第1光ファイバが収容され、前記第1光ファイバが固定される第1収容溝と、前記嵌合凹部に連通し、前記第2光ファイバが収容され、前記第2光ファイバが固定される第2収容溝と、を有する。
また、本発明の態様3は、態様1または態様2の血流測定用光プローブにおいて、前記反射部材は、直角プリズムである。
また、本発明の態様4は、態様1から態様3のいずれか一つの血流測定用光プローブにおいて、前記第1光ファイバおよび前記第2光ファイバは、前記チューブの内周面に対して、前記長手方向と交差する方向において間隔を空けて配されている。
また、本発明の態様5は、態様1から態様4のいずれか一つの血流測定用光プローブにおいて、前記血流測定用光プローブは、前記チューブに挿入され、前記固定部材に固定され、前記長手方向に延びるトルクコイルをさらに備える。
また、本発明の態様6は、態様1から態様5のいずれか一つの血流測定用光プローブにおいて、前記血流測定用光プローブは、前記固定部材のX線不透過性よりも高いX線不透過性を有するマーカー部材をさらに備える。
また、本発明の態様7に係る内視鏡は、態様1から態様6のいずれか一つの血流測定用光プローブと、前記血流測定用光プローブが挿通された鉗子口を有する本体部と、を備える。
本発明の上記態様によれば、光ファイバに対する反射部材の位置決めを容易に行うことが可能な血流測定用光プローブ、および内視鏡を提供することができる。
(第1実施形態)
以下、第1実施形態に係る血流測定用光プローブについて図面に基づいて説明する。
図1および図2に示すように、血流測定用光プローブ1Aは、チューブ10と、固定部材20と、第1光ファイバ31と、第2光ファイバ32と、反射部材40と、マーカー部材50と、を備える。図1に示すように、チューブ10は、中心軸線Oを有する。第1光ファイバ31および第2光ファイバ32は、チューブ10の中心軸線Oと平行な方向に延びている。図2に示すように、第1光ファイバ31および反射部材40は、第1光ファイバ31が延びる方向(チューブ10の中心軸線Oと平行な方向)において互いに対向している。以下、血流測定用光プローブ1Aを、単に「プローブ1A」と称する場合がある。
以下、第1実施形態に係る血流測定用光プローブについて図面に基づいて説明する。
図1および図2に示すように、血流測定用光プローブ1Aは、チューブ10と、固定部材20と、第1光ファイバ31と、第2光ファイバ32と、反射部材40と、マーカー部材50と、を備える。図1に示すように、チューブ10は、中心軸線Oを有する。第1光ファイバ31および第2光ファイバ32は、チューブ10の中心軸線Oと平行な方向に延びている。図2に示すように、第1光ファイバ31および反射部材40は、第1光ファイバ31が延びる方向(チューブ10の中心軸線Oと平行な方向)において互いに対向している。以下、血流測定用光プローブ1Aを、単に「プローブ1A」と称する場合がある。
<方向定義>
ここで、本実施形態では、チューブ10の中心軸線Oと平行に第1光ファイバ31から反射部材40に向かう向きを、前方または先端側と称し、図において+Zの向きで表す。前方とは反対の向きを、後方または基端側と称し、図において-Zの向きで表す。前方(+Zの向き)と後方(-Zの向き)とを特に区別しない場合、長手方向Zまたは軸方向Zと称する。長手方向Zに垂直な断面を、横断面と称する。長手方向Zから見て、チューブ10の中心軸線Oに直交する方向を、径方向と称する。径方向に沿って、中心軸線Oに接近する向きを、径方向内側と称し、中心軸線Oから離反する向きを、径方向外側と称する。長手方向Zから見て、中心軸線Oまわりに周回する方向を、周方向と称する。また、長手方向Zに直交する一つの向きを、左方と称し、図において+Yの向きで表す。左方とは反対の向きを、右方と称し、図において-Yの向きで表す。左方(+Yの向き)と右方(-Yの向き)とを特に区別しない場合、第1方向Yと称する。第1方向Yに垂直な断面を、縦断面と称する。長手方向Zおよび第1方向Yの双方に直交する一つの向きを、上方と称し、図において+Xの向きで表す。上方とは反対の向きを、下方と称し、図において-Xの向きで表す。上方(+Xの向き)と下方(-Xの向き)とを特に区別しない場合、第2方向Xと称する。
ここで、本実施形態では、チューブ10の中心軸線Oと平行に第1光ファイバ31から反射部材40に向かう向きを、前方または先端側と称し、図において+Zの向きで表す。前方とは反対の向きを、後方または基端側と称し、図において-Zの向きで表す。前方(+Zの向き)と後方(-Zの向き)とを特に区別しない場合、長手方向Zまたは軸方向Zと称する。長手方向Zに垂直な断面を、横断面と称する。長手方向Zから見て、チューブ10の中心軸線Oに直交する方向を、径方向と称する。径方向に沿って、中心軸線Oに接近する向きを、径方向内側と称し、中心軸線Oから離反する向きを、径方向外側と称する。長手方向Zから見て、中心軸線Oまわりに周回する方向を、周方向と称する。また、長手方向Zに直交する一つの向きを、左方と称し、図において+Yの向きで表す。左方とは反対の向きを、右方と称し、図において-Yの向きで表す。左方(+Yの向き)と右方(-Yの向き)とを特に区別しない場合、第1方向Yと称する。第1方向Yに垂直な断面を、縦断面と称する。長手方向Zおよび第1方向Yの双方に直交する一つの向きを、上方と称し、図において+Xの向きで表す。上方とは反対の向きを、下方と称し、図において-Xの向きで表す。上方(+Xの向き)と下方(-Xの向き)とを特に区別しない場合、第2方向Xと称する。
チューブ10は、長手方向Zに延びる筒状の弾性部材である。チューブ10の材質は、生体適合性の高い材質であることが好ましい。具体的に、本実施形態に係るチューブ10は、いわゆる経鼻胃管である。図1および図2に示すように、チューブ10の先端(前端)には、面取り加工が施されている。これにより、チューブ10が生体内の組織を傷つけにくくなる。チューブ10の外径は、例えば14~18Fr(4.7~6.0mm)程度である。チューブ10の内径は、例えば3.1~3.9mm程度である。
図1および図2に示すように、チューブ10のうち、径方向(本実施形態では第2方向X)において反射部材40と対向する部位には、透光部11が設けられている。透光部11は、第1光ファイバ31から出射される光および第2光ファイバ32に入射する光の双方を透過するように構成されている。本実施形態において、透光部11は、チューブ10の外周面に開口してチューブ10の内周面10aまで延びる貫通孔である。ただし、透光部11は貫通孔でなくてもよい。透光部11は、例えば、透明な素材(樹脂等)によって形成された部位であってもよい。
図2に示すように、固定部材20は、チューブ10に挿入され、固定部材20の内周面10aに固定されている。具体的に、固定部材20は、径方向内側に向けたチューブ10の弾性復元力と、接着剤A1の接着力(詳細は後述)と、によって固定部材20の内周面10aに固定されている。固定部材20は、光ファイバ31、32および反射部材40を保持するとともに、光ファイバ31、32に対する反射部材40の位置決めを行う役割を有する。
図3に示すように、本実施形態に係る固定部材20の外周面(径方向外側を向く面)は、第1曲面20aと、第2曲面20bと、第1平坦面20cと、第2平坦面20dと、を含む(図1および図2も参照)。図3に示すように、第1曲面20a、第1平坦面20c、第2曲面20b、および第2平坦面20dは、周方向においてこの順に並んでいる。第1曲面20aおよび第2曲面20bは、横断面視において円弧状の形状を有する。第1曲面20aは、上方を向いている。第2曲面20bは、下方を向いている。第1平坦面20cおよび第2平坦面20dは、横断面視において、第2方向Xに延びる直線状の形状を有する。第1平坦面20cは、左方を向いている。第2平坦面20dは、右方を向いている。
図2および図3に示すように、本実施形態に係る固定部材20は、先端部20Aと、嵌合部20Bと、収容部20Cと、後端部20Dと、を含む。先端部20A、嵌合部20B、収容部20C、および後端部20Dは、前方から後方に向かう向き(-Zの向き)においてこの順に並んでおり、互いに隣接している。なお、本実施形態において、先端部20A、嵌合部20B、収容部20C、および後端部20Dは同一の素材によって一体に形成されている。固定部材20(先端部20A、嵌合部20B、収容部20C、および後端部20D)の材質は、生体適合性の高い材質であることが望ましい。固定部材20の材質としては、例えば、医療用のPEEK(ポリエーテルエーテルケトン)樹脂等を用いることができる。
図2および図3に示すように、嵌合部20Bは、固定部材20のうち嵌合凹部23が形成された部位である。図2に示すように、本実施形態に係る嵌合凹部23は、縦断面視において矩形の形状を有する。嵌合凹部23には、反射部材40が嵌合される。図3に示すように、本実施形態に係る嵌合凹部23は、第1曲面20a、第1平坦面20c、および第2平坦面20dに開口している。
図2および図3に示すように、収容部20Cは、固定部材20のうち第1収容溝21および第2収容溝22が形成された部位である。図1および図2に示すように、第1収容溝21には第1光ファイバ31が収容される。同様に、第2収容溝22には第2光ファイバ32が収容される。図1および図3に示すように、第1収容溝21および第2収容溝22の各々は、第1曲面20aに開口して長手方向Zに延びる溝である。第1収容溝21および第2収容溝22は、第1方向Yにおいて間隔を空けて配されている。第1収容溝21は、第2収容溝22よりも左方(+Y側)に位置する。また、第1収容溝21の前端および第2収容溝22の前端は、嵌合凹部23に連通している。
図2および図3に示すように、後端部20Dは、固定部材20のうち収容部20C(第1収容溝21および第2収容溝22)よりも後方に位置する部位である。本実施形態に係る後端部20Dには、第1曲面20a、第1平坦面20c、第2平坦面20d、および固定部材20の後面に開口する切片凹部26が形成されている。切片凹部26は、第1収容溝21の後端および第2収容溝22の後端に連通している。
図2および図3に示すように、先端部20Aは、固定部材20のうち嵌合部20B(嵌合凹部23)よりも前方に位置する部位である。本実施形態に係る先端部20Aには、上述した凹部や溝が形成されていない。固定部材20(先端部20A)の前面は、チューブ10の先端よりも後方に位置する。チューブ10の内周面10aと、固定部材20(先端部20A)の前面と、によって囲まれる空間には、接着剤A1が充填されている。接着剤A1は、固定部材20(先端部20A)をチューブ10の内周面10aに接着する。接着剤A1としては、生体適合性の高い接着剤を用いることが好ましい。
図2および図3に示すように、本実施形態に係る固定部材20には、第1マーカー凹部24Aおよび第2マーカー凹部24Bを含む一対のマーカー凹部24が形成されている(第1マーカー凹部24Aのみ図示)。図3に示すように、本実施形態に係る第1マーカー凹部24Aは、固定部材20の後面および第1平坦面20cに開口している。詳細な図示は省略するが、本実施形態に係る第2マーカー凹部24Bは、固定部材20の後面および第2平坦面20dに開口している。各マーカー凹部24A、24Bには、マーカー部材50が収容される(図2参照)。また、本実施形態において、各マーカー凹部24A、24Bは、固定部材20(後端部20D)の後端から前方に向けて延びており、各マーカー凹部24A、24Bの先端は、収容部20Cに位置する(図2および図3参照)。
第1光ファイバ31は、コア(不図示)と、当該コアを覆うクラッド(不図示)と、を有する。同様に、第2光ファイバ32も、コアおよびクラッドを有する。図示は省略するが、本実施形態に係る各光ファイバ31、32の基端には、レーザー血流計が接続される。第1光ファイバ31は、レーザー血流計から入力された光を、第1光ファイバ31の先端まで伝播させ、第1光ファイバ31の先端から前方に向けて出射する。また、第2光ファイバ32は、第2光ファイバ32の先端から入力された光を、第2光ファイバ32の基端まで伝播させ、レーザー血流計に入力する。
前述したように、第1光ファイバ31は、固定部材20の第1収容溝21に収容される(図1参照)。第2光ファイバ32は、固定部材20の第2収容溝22に収容される(図1参照)。図2に示すように、第1光ファイバ31は、第1収容溝21に充填された接着剤A2によって第1収容溝21に固定される。同様に、第2光ファイバ32は、第2収容溝22に充填された接着剤A2によって第2収容溝22に固定される。接着剤A2としては、生体適合性の高い接着剤を用いることが好ましい。
また、図2に示すように、第1光ファイバ31は、チューブ10の内周面10aに対して、長手方向Zと交差する方向(径方向)において間隔を空けて配されている。言い換えれば、長手方向Zと交差する方向(径方向)において、第1光ファイバ31とチューブ10の内周面10aとの間には、間隔が存在する。さらに言い換えれば、第1光ファイバ31は、チューブ10の内周面10aに接していない。詳細な図示は省略するが、第2光ファイバ32も、チューブ10の内周面10aに対して、長手方向Zと交差する方向(径方向)において間隔を空けて配されている。言い換えれば、長手方向Zと交差する方向(径方向)において、第2光ファイバ32とチューブ10の内周面10aとの間には、間隔が存在する。さらに言い換えれば、第2光ファイバ32は、チューブ10の内周面10aに接していない。また、図1および図2に示すように、本実施形態に係る第1光ファイバ31は第1収容溝21から前方に突出しており、第1光ファイバ31の先端は嵌合凹部23内に位置する。同様に、本実施形態に係る第2光ファイバ32は第2収容溝22から前方に突出しており、第2光ファイバ32の先端は嵌合凹部23内に位置する。
本実施形態に係る反射部材40は、石英ガラス製の直角プリズムである。つまり、図2に示すように、反射部材40は、縦断面視において直角二等辺三角形となる三角柱状の形状を有する。具体的に、本実施形態に係る反射部材40は、第1面40aと、第2面40bと、第3面(斜面)40cと、を有する。第1面40aは、縦断面視において第2方向Xに延びる面である。第2面40bは、縦断面視において第1面40aの下端から後方に向けて延びる面である。また、第1面40aの第2方向Xにおける寸法と、第2面40bの長手方向Zにおける寸法とは、互いに略等しい。なお、本明細書において文言「略等しい」には、製造誤差を取り除けば等しいとみなせる場合も含まれる。第3面40cは、第1面40aの上端と第2面40bの後端とを接続する面である。縦断面視において、第3面40cと第1面40aとがなす角、および、第3面40cと第2面40bとがなす角は、ともに略45°である。なお、本明細書において文言「略45°」には、製造誤差を取り除けば等しいとみなせる場合も含まれる。本実施形態に係る第3面40cは、金属によってコーティングされている。第3面40cは、光を反射する反射面として機能する。
図2に示すように、本実施形態に係る反射部材40は、第1面40aが嵌合凹部23の前面に接し、第2面40bが嵌合凹部23の下面に接するように、嵌合凹部23に嵌合される。反射部材40は、嵌合凹部23に対し接着固定されていてもよい。また、反射部材40がこのように嵌合凹部23に嵌合された状態において、反射部材40の第3面40cは、長手方向Zにおいて、第1光ファイバ31および第2光ファイバ32と対向する。これにより、反射部材40(第3面40c)は、第1光ファイバ31から出射された光を、長手方向Zと交差する方向(例えば、径方向)に向けて反射する。また、反射部材40(第3面40c)は、長手方向Zと交差する方向(例えば、径方向)から入射してきた光を、第2光ファイバ32に向けて反射する。つまり、嵌合凹部23を反射部材40に嵌合することにより、光ファイバ31、32に対する反射部材40の位置決めを行うことができる。
マーカー部材50は、固定部材20のX線不透過性よりも高いX線不透過性を有する部材である。これにより、プローブ1Aを生体内に挿入した際に、X線透視をすることで生体内におけるプローブ1Aの位置および向きを確認することができる。マーカー部材50の材質としては、例えば白金、金等を採用することができる。詳細な図示は省略するが、本実施形態に係るプローブ1Aは、第1マーカー凹部24Aに収容された第1マーカー部材50Aと、第2マーカー凹部24Bに収容された第2マーカー部材50Bと、を備える。第1マーカー部材50Aは、第1マーカー凹部24Aに接着固定されている。第2マーカー部材50Bは、第2マーカー凹部24Bに接着固定されている。なお、プローブ1Aは1つまたは3つ以上のマーカー部材50を備えていてもよい。あるいは、プローブ1Aはマーカー部材50を備えていなくてもよい。
次に、以上のように構成されたプローブ1Aの作用について説明する。
本実施形態に係るプローブ1Aを用いて生体内の対象組織(例えば、消化管等)中における血流の量を計測する場合、上述したレーザー血流計は、第1光ファイバ31に所定の光を出力する。当該出力光は、第1光ファイバ31の中を伝播し、第1光ファイバ31の先端から前方に向けて出射される。すると、当該出射光は、反射部材40の第3面40cによって径方向外側に向けて反射され、透光部11を透過してプローブ1A外の対象組織に照射される。そして、当該照射光は、対象組織内で散乱され、プローブ1Aに戻る。対象組織内で散乱された光は、透光部11を透過してプローブ1A内に進入した後、反射部材40の第3面40cによって反射され、第2光ファイバ32に入力される。そして、第2光ファイバ32の先端に入力された光は、第2光ファイバ32の中を伝播し、レーザー血流計に入力される。レーザー血流計は、第1光ファイバ31に出力した光および第2光ファイバ32から入力された光を分析することで、対象組織を流れる血流の量等を測定することができる。具体的に、レーザー血流計は、第1光ファイバ31に出力した光と第2光ファイバ32に入力された光との周波数差や強度差を用いて、対象組織中の血流量を測定するように構成されていてもよい。
また、本実施形態に係るプローブ1Aにおいては、反射部材40を嵌合凹部23に嵌合することにより、各光ファイバ31、32に対する反射部材40の位置決めを行うことができる。したがって、例えば非特許文献1に記載されているような、固定部材が有する斜面に対して反射部材を貼り付ける構成と比較して、各光ファイバ31、32に対する反射部材40との位置決めを容易に行うことができる。
また、本実施形態に係るプローブ1Aを組み立てるにあたっては、まず、固定部材20に対して光ファイバ31、32、反射部材40、およびマーカー部材50を固定したのちに、固定部材20をチューブ10に挿入すればよい。したがって、例えば非特許文献1に記載されているプローブと比較して、プローブ1Aの組み立てに要する労力を削減することができる。なお、固定部材20の外周面が横断面視において円形状でなく、第1平坦面20cおよび第2平坦面20dが設けられているのは、固定部材20とチューブ10との接触面積を減らして摩擦抵抗を抑制するためである。これにより、チューブ10内に固定部材20を挿入しやすくなる。
以上説明したように、本実施形態に係るプローブ1Aは、チューブ10と、チューブ10に挿入され、チューブ10の内周面10aに固定される固定部材20と、固定部材20に固定された第1光ファイバ31と、固定部材20に固定された第2光ファイバ32と、第1光ファイバ31から出射された光を長手方向Zと交差する方向に向けて反射するとともに、長手方向Zと交差する方向から入射してきた光を第2光ファイバ32に向けて反射する反射部材40と、を備え、固定部材20は、反射部材40が嵌合される嵌合凹部23を有する。
この構成により、反射部材40を嵌合凹部23に嵌め合わせることで、第1光ファイバ31および第2光ファイバ32に対する反射部材40の位置決めを行うことができる。したがって、光ファイバ31、32に対する反射部材40の位置決めを容易に行うことができる。
また、固定部材20は、嵌合凹部23に連通し、第1光ファイバ31が収容され、第1光ファイバ31が固定される第1収容溝21と、嵌合凹部23に連通し、第2光ファイバ32が収容され、第2光ファイバ32が固定される第2収容溝22と、を有する。この構成により、反射部材40を嵌合凹部23に嵌め合わせることで光ファイバ31、32に対する反射部材40の位置決めがなされる構成を容易に実現することができる。
また、反射部材40は、直角プリズムである。この構成により、例えば非特許文献1に記載されているような、固定部材が有する斜面に対して反射部材を貼り付ける構成と比較して、光を反射する反射面(第3面40c)の角度の決定をより容易に行うことができる。
また、第1光ファイバ31および第2光ファイバ32は、チューブ10の内周面10aに対して、長手方向Zと交差する方向において間隔を空けて配されている。一般に、光ファイバから出射された光は、光ファイバから離れるにしたがって、径方向外側に向けて放射状に拡散する。光ファイバ31、32をチューブ10の内周面10aから遠ざけることにより、例えば光ファイバ31、32がチューブ10の内周面10aに接している場合と比較して、プローブ1Aが光を照射する範囲、すなわち、血流の測定の対象となる範囲を広げることができる。例えば、光ファイバ31、32として開口数0.27~0.29程度の光ファイバを用いた場合、光ファイバ31、32とチューブ10の外周面との径方向における距離を2.5mm以上とすることで、チューブ10の外周面と接触する対象組織における血流測定範囲の直径を1.63mm以上とすることができる。
また、本実施形態に係るプローブ1Aは、固定部材20のX線不透過性よりも高いX線不透過性を有するマーカー部材50をさらに備える。この構成により、プローブ1Aを生体内に挿入した際に、X線透視をすることで生体内におけるプローブ1Aの位置および向きを確認することができる。
(第2実施形態)
次に、第2実施形態について説明するが、第1実施形態と基本的な構成は同様である。このため、同様の構成には同一の符号を付してその説明は省略し、異なる点についてのみ説明する。
次に、第2実施形態について説明するが、第1実施形態と基本的な構成は同様である。このため、同様の構成には同一の符号を付してその説明は省略し、異なる点についてのみ説明する。
図4に示すように、本実施形態に係るプローブ(血流測定用光プローブ)1Bは、内視鏡3を構成する部品として用いられる。内視鏡3は、鉗子口2aを有する本体部2と、鉗子口2aに挿通されたプローブ1Bと、を備える。プローブ1Bは、本体部2の先端から突出して、対象組織T(例えば、消化管等)中における血流を測定する。なお、内視鏡3は本体部2およびプローブ1B以外の構成部品(例えば、カメラ等)を備えていてもよい。
プローブ1Bを本体部2の鉗子口2aに挿入するために、本実施形態に係るチューブ10の外径は、第1実施形態に係るチューブ10の外径よりも小さい。本実施形態に係るチューブ10の外径は、例えば1.854~2.489mm程度である。本実施形態に係るチューブ10の内径は、例えば1.930~2.591mm程度である。鉗子口2aの内径は、例えば2.2~2.8mm程度である。
第1実施形態と同様に、チューブ10の材質は、生体適合性の高い材質であることが好ましい。チューブ10の材質としては、例えば、PI(ポリイミド)やPTFE(ポリテトラフルオロエチレン)等を用いることができる。また、本実施形態においては、図5および図6に示すように、固定部材20とチューブ10とを接着する接着剤A1が、チューブ10の先端から半球状に突出している。これにより、チューブ10の先端(プローブ1Bの先端)が生体内の組織を傷つけにくくなる。
図5および図6に示すように、本実施形態に係るプローブ1Bは、マーカー部材50を備えず、チューブ10に挿入されたトルクコイル60を備える。また、本実施形態に係るプローブ1Bと第1実施形態に係るプローブ1Aとでは、固定部材20の形状が異なる。具体的には、図7に示すように、本実施形態に係る固定部材20の外周面は、第1実施形態のように平坦面を含んでおらず、横断面視において円形状である。また、本実施形態に係る固定部材20は、固定部材20の後面から後方に向けて延出する延出部25を有する。図6に示すように、延出部25は、トルクコイル60の内部に挿入される。トルクコイル60は、チューブ10の内周面10aおよび延出部25の挟持力と、接着剤A2の接着力とにより、固定部材20の後端部20Dに固定されている。
トルクコイル60は、長手方向Zに延びる筒状の部材である。トルクコイル60は、チューブ10の剛性よりも高い剛性を有し、チューブ10よりもトルク伝達力および回転同期性に優れる部材である。ここで、「トルク伝達力」は、プローブ1Bの基端に加えられた中心軸線Oまわりのトルクをプローブ1Bの先端まで伝達する際の、トルクの減衰のしにくさを表す指標である。また、「回転同期性」は、プローブ1Bの基端の回転角とプローブ1Bの先端の回転角との一致の程度を表す指標である。詳細な図示は省略するが、本実施形態に係るトルクコイル60は、3つのステンレス製のコイルを同心円状に3層積層させた構造を有する。トルクコイル60においては、最も内側の層および最も外側の層におけるコイルの巻きの向きと、中間の層におけるコイルの巻きの向きとが、互いに逆向きとなっている。
トルク伝達力および回転同期性に優れるトルクコイル60を固定部材20の後端に接続させることにより、チューブ10が細く(薄く)柔らかい場合であっても、プローブ1Bの動きを容易に制御することができる。つまり、医師等の人間(または医療用ロボット等の機械)がプローブ1Bの基端に加えた操作がプローブ1Bの先端まで精度よく伝達されるため、プローブ1Bの先端に所望の動作を行わせやすくなる。
ここで、本実施形態に係るプローブ1Bにおいても、第1実施形態に係るプローブ1Aと同様に、反射部材40を嵌合凹部23に嵌め合わせることで、第1光ファイバ31および第2光ファイバ32に対する反射部材40の位置決めを行うことができる。したがって、本実施形態に係るプローブ1Bにおいても、光ファイバ31、32に対する反射部材40の位置決めを容易に行うことができる。
また、上述したように、本実施形態に係るプローブ1Bは、チューブ10に挿入され、固定部材20に固定され、長手方向Zに延びるトルクコイル60をさらに備える。この構成により、チューブ10が細く(薄く)柔らかい場合であっても、プローブ1Bの動きを容易に制御することができる。
なお、本発明の技術的範囲は前記実施形態に限定されず、本発明の趣旨を逸脱しない範囲において種々の変更を加えることが可能である。
例えば、前記実施形態では、反射部材40は石英ガラス製の直角プリズムであると説明したが、反射部材40は透明樹脂製等であってもよい。また、反射部材40の全体が金属の素材によって形成されていてもよい。この場合、第3面40cは金属でコーティングされていなくてもよい。また、反射部材40の形状は三角柱に限られない。反射部材40が光を反射可能であり、かつ、嵌合凹部23に反射部材40を嵌合することで光ファイバ31、32に対する反射部材40の位置決めが可能であれば、反射部材40の材質および形状、または嵌合凹部23の形状は適宜変更可能である。同様に、第1収容溝21および第2収容溝22の形状は適宜変更可能である。
また、第1光ファイバ31または第2光ファイバ32が、チューブ10の内周面10aと接していてもよい。
また、図8に示すように、プローブ1Bの先端部は、内視鏡3の長手方向に対して屈曲可能に構成されていてもよい。この場合、プローブ1Bを対象組織Tに近づけ、より高い精度で血流の測定を行うことができる。
その他、本発明の趣旨を逸脱しない範囲で、上記した実施形態における構成要素を周知の構成要素に置き換えることは適宜可能であり、また、上記した実施形態や変形例を適宜組み合わせてもよい。
1A、1B…プローブ(血流測定用光プローブ) 2…本体部 2a…鉗子口 3…内視鏡 10…チューブ 10a…内周面 20…固定部材 21…第1収容溝 22…第2収容溝 23…嵌合凹部 31…第1光ファイバ 32…第2光ファイバ 40…反射部材 50…マーカー部材 60…トルクコイル
Claims (7)
- チューブと、
前記チューブに挿入され、前記チューブの内周面に固定される固定部材と、
前記固定部材に固定された第1光ファイバと、
前記固定部材に固定された第2光ファイバと、
前記第1光ファイバから出射された光を前記チューブの長手方向と交差する方向に向けて反射するとともに、前記チューブの長手方向と交差する方向から入射してきた光を前記第2光ファイバに向けて反射する反射部材と、を備え、
前記固定部材は、前記反射部材が嵌合される嵌合凹部を有する、血流測定用光プローブ。 - 前記固定部材は、
前記嵌合凹部に連通し、前記第1光ファイバが収容され、前記第1光ファイバが固定される第1収容溝と、
前記嵌合凹部に連通し、前記第2光ファイバが収容され、前記第2光ファイバが固定される第2収容溝と、を有する、請求項1に記載の血流測定用光プローブ。 - 前記反射部材は、直角プリズムである、請求項1または2に記載の血流測定用光プローブ。
- 前記第1光ファイバおよび前記第2光ファイバは、前記チューブの内周面に対して、前記長手方向と交差する方向において間隔を空けて配されている、請求項1から3のいずれか一項に記載の血流測定用光プローブ。
- 前記チューブに挿入され、前記固定部材に固定され、前記長手方向に延びるトルクコイルをさらに備える、請求項1から4のいずれか一項に記載の血流測定用光プローブ。
- 前記固定部材のX線不透過性よりも高いX線不透過性を有するマーカー部材をさらに備える、請求項1から5のいずれか一項に記載の血流測定用光プローブ。
- 請求項1から6のいずれか一項に記載の血流測定用光プローブと、
前記血流測定用光プローブが挿通された鉗子口を有する本体部と、を備える、内視鏡。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2024545470A JPWO2024053242A1 (ja) | 2022-09-07 | 2023-07-12 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022141902 | 2022-09-07 | ||
| JP2022-141902 | 2022-09-07 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024053242A1 true WO2024053242A1 (ja) | 2024-03-14 |
Family
ID=90192367
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/025718 WO2024053242A1 (ja) | 2022-09-07 | 2023-07-12 | 血流測定用光プローブ、および内視鏡 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2024053242A1 (ja) |
| WO (1) | WO2024053242A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02203838A (ja) * | 1989-02-03 | 1990-08-13 | Canon Inc | 血流計用測定プローブ |
| WO2012098999A1 (ja) * | 2011-01-19 | 2012-07-26 | Hoya株式会社 | Octプローブ |
| CN103385758A (zh) * | 2013-07-22 | 2013-11-13 | 深圳先进技术研究院 | 一种血管内光声超声双模成像系统及其成像方法 |
| WO2015019660A1 (ja) * | 2013-08-09 | 2015-02-12 | 国立大学法人東北大学 | 脊髄腔内血流測定装置 |
| US20150099984A1 (en) * | 2012-05-14 | 2015-04-09 | Avinger, Inc. | Optical coherence tomography with graded index fiber for biological imaging |
-
2023
- 2023-07-12 JP JP2024545470A patent/JPWO2024053242A1/ja active Pending
- 2023-07-12 WO PCT/JP2023/025718 patent/WO2024053242A1/ja active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02203838A (ja) * | 1989-02-03 | 1990-08-13 | Canon Inc | 血流計用測定プローブ |
| WO2012098999A1 (ja) * | 2011-01-19 | 2012-07-26 | Hoya株式会社 | Octプローブ |
| US20150099984A1 (en) * | 2012-05-14 | 2015-04-09 | Avinger, Inc. | Optical coherence tomography with graded index fiber for biological imaging |
| CN103385758A (zh) * | 2013-07-22 | 2013-11-13 | 深圳先进技术研究院 | 一种血管内光声超声双模成像系统及其成像方法 |
| WO2015019660A1 (ja) * | 2013-08-09 | 2015-02-12 | 国立大学法人東北大学 | 脊髄腔内血流測定装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2024053242A1 (ja) | 2024-03-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7269272B2 (ja) | 画像誘導治療/診断カテーテル用マイクロ成形アナモフィック反射器レンズ | |
| JP7202341B2 (ja) | 光コヒーレンス断層撮影システム | |
| US6445939B1 (en) | Ultra-small optical probes, imaging optics, and methods for using same | |
| US20110137124A1 (en) | Optical imaging catheter for aberration balancing | |
| EP2972535B1 (en) | Optical fiber beam directing systems and apparatuses | |
| US10234676B1 (en) | Optical probes with reflecting components for astigmatism correction | |
| CN219846780U (zh) | 医疗设备和医疗设备系统 | |
| JPWO2008081653A1 (ja) | 光プローブ | |
| US7029436B2 (en) | Optical probe for producing tomogram of specimen by the use of low-coherence light | |
| JP6499375B2 (ja) | 放射状照明システム | |
| CN219963105U (zh) | 医疗设备系统和医疗设备 | |
| WO2009137704A1 (en) | Optical imaging catheter for aberration balancing | |
| CN116763434A (zh) | 具有无损伤尖端的医疗系统 | |
| US11874455B2 (en) | Light irradiation device and light irradiation system | |
| JP2018198929A (ja) | 非点収差の光ファイバ補正 | |
| WO2024053242A1 (ja) | 血流測定用光プローブ、および内視鏡 | |
| JP2016202281A (ja) | 光プローブ | |
| JP6024151B2 (ja) | 光プローブ | |
| Bartnik et al. | Thin-film-based optical fiber interferometric sensor on the fiber tip for endovascular surgical procedures | |
| CN220608404U (zh) | 具有无损伤尖端的医疗系统 | |
| JP7466653B2 (ja) | 光照射デバイス、及び、光照射システム | |
| CN111419187B (zh) | 光学相干断层成像内窥探头及成像系统 | |
| JP3710861B2 (ja) | 体内挿入式医療器具用のセンサ及びそれを用いたセンシング方法 | |
| JP2009297456A (ja) | 血流測定補助具 | |
| WO2025047858A1 (ja) | 光学式検査装置および光ファイバ構造体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23862786 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024545470 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |