WO2023189344A1 - 電動作業機 - Google Patents
電動作業機 Download PDFInfo
- Publication number
- WO2023189344A1 WO2023189344A1 PCT/JP2023/008995 JP2023008995W WO2023189344A1 WO 2023189344 A1 WO2023189344 A1 WO 2023189344A1 JP 2023008995 W JP2023008995 W JP 2023008995W WO 2023189344 A1 WO2023189344 A1 WO 2023189344A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- rotation speed
- electric motor
- temperature
- hydraulic oil
- hydraulic
- Prior art date
Links
- 239000010720 hydraulic oil Substances 0.000 claims abstract description 177
- 239000003921 oil Substances 0.000 claims abstract description 80
- 238000001514 detection method Methods 0.000 claims abstract description 39
- 238000001816 cooling Methods 0.000 claims description 21
- 239000012530 fluid Substances 0.000 claims description 15
- 238000000034 method Methods 0.000 description 15
- 239000007858 starting material Substances 0.000 description 7
- 238000003860 storage Methods 0.000 description 7
- 238000010586 diagram Methods 0.000 description 6
- 239000000498 cooling water Substances 0.000 description 5
- 230000007423 decrease Effects 0.000 description 4
- 230000008602 contraction Effects 0.000 description 3
- 230000007935 neutral effect Effects 0.000 description 3
- 238000010792 warming Methods 0.000 description 3
- 238000000691 measurement method Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000005096 rolling process Methods 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 240000007594 Oryza sativa Species 0.000 description 1
- 235000007164 Oryza sativa Nutrition 0.000 description 1
- 241001417527 Pempheridae Species 0.000 description 1
- 244000007853 Sarothamnus scoparius Species 0.000 description 1
- 238000009412 basement excavation Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000020169 heat generation Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 235000009566 rice Nutrition 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L9/00—Electric propulsion with power supply external to the vehicle
- B60L9/16—Electric propulsion with power supply external to the vehicle using ac induction motors
- B60L9/18—Electric propulsion with power supply external to the vehicle using ac induction motors fed from dc supply lines
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
Definitions
- the present invention relates to an electric working machine driven by the power of an electric motor.
- Patent Document 1 discloses an electric working machine driven by the power of an electric motor.
- the electric working machine disclosed in Patent Document 1 includes an electric motor driven by electric power output from a battery unit, a hydraulic pump driven by the electric motor to discharge hydraulic oil, and driven by the hydraulic oil discharged by the hydraulic pump.
- the vehicle is equipped with hydraulic equipment, a working device operated by the hydraulic equipment, an operating device that operates the hydraulic equipment, a control device that controls the rotational speed of the electric motor, and the like.
- the control device sets the rotation speed of the electric motor according to the operation of the operating device when the output current value from the battery unit is equal to or higher than a predetermined value, and when the output current value from the battery unit is less than the predetermined value. Then, the rotational speed of the electric motor is set to a predetermined idling rotational speed.
- the present invention was made to solve the problems of the above-mentioned prior art, and aims to reduce wasteful power consumption in electric working machines and improve work efficiency.
- An electric working machine includes a body, a battery unit mounted on the body, an electric motor driven by electric power from the battery unit, and a hydraulic device operated by the power from the electric motor.
- a working device operated by hydraulic pressure of hydraulic fluid supplied from the hydraulic equipment; a control device controlling drive of the electric motor; a first position for permitting operation of the working device; and a first position for permitting operation of the working device;
- the control device includes a switching member that can be switched to one of the second positions that does not permit, and an oil temperature detection device that detects the temperature of the hydraulic oil.
- the rotation speed of the electric motor is changed to a predetermined value corresponding to a stopped state of the electric motor. Control to the first rotation speed.
- the control device is configured to change the rotation speed of the electric motor to the second position when the switching member is switched to the second position and the temperature of the hydraulic oil is not within the permissible temperature range.
- the idling rotation speed may be controlled to a predetermined idling rotation speed that is greater than 1 rotation speed and less than or equal to the lower limit of the rotation speed when working with the working device.
- the control device controls the rotation speed of the electric motor to a predetermined value if the temperature of the hydraulic fluid is lower than the allowable temperature range. If the temperature of the hydraulic oil is higher than the allowable temperature range, the rotation speed of the electric motor is controlled to match the third rotation speed, and if the temperature of the hydraulic oil is higher than the allowable temperature range, the rotation speed of the electric motor is controlled to match the third rotation speed.
- the rotation speed may be controlled to the second rotation speed.
- the electric working machine includes a work detection device that detects whether or not the work device is in operation based on the hydraulic pressure of the hydraulic oil, and the second rotation speed is such that the work detection device can detect whether or not the work device is in operation.
- the rotation speed may be set to a value that can generate a hydraulic pressure of the hydraulic oil.
- the control device is configured to control whether the temperature of the hydraulic fluid is lower than the allowable temperature range when the switching member is in the first position and the working device is not operated for a predetermined time or more while the electric motor is being driven. For example, the number of revolutions of the electric motor is controlled to match the third number of revolutions, and if the temperature of the hydraulic oil is equal to or higher than the allowable temperature range, the number of revolutions of the electric motor is controlled to match the second number of revolutions. May be controlled.
- the electric working machine includes an instruction member that is operated to instruct the number of rotations of the electric motor, and the control device controls the number of rotations of the electric motor that can be instructed by operating the instruction member. It may be set according to the temperature.
- the electric working machine includes a selection member that selects either a first mode or a second mode that reduces power consumption more than the first mode, and the control device is configured such that the temperature of the hydraulic fluid is set to the allowable temperature. If it is within the range, when the second mode is selected by the selection member, the upper limit of the instruction range of the rotation speed of the electric motor by the operation of the instruction member is determined by the selection member when the first mode is selected. It may be set smaller than the upper limit of the specified range when selected.
- the control device controls whether the first mode or the second mode is selected by the selection member.
- An upper limit value of the instruction range of the rotation speed of the electric motor by the operation of a member is set to a value smaller than a predetermined maximum rotation speed, and the maximum rotation speed is set when the temperature of the hydraulic fluid is within the permissible temperature range and
- the rotation speed may be an upper limit value of the rotation speed that can be instructed by the instruction member when the first mode is selected.
- the control device is configured to control whether the first mode or the second mode is selected by the selection member when the temperature of the hydraulic oil is higher than a predetermined second temperature that is higher than the allowable temperature range.
- the rotation speed that can be specified by the instruction member may be set to the third rotation speed.
- the electric working machine includes a cooling device that cools the hydraulic fluid, and the control device drives the cooling device when the temperature of the hydraulic fluid detected by the oil temperature detection device is higher than the permissible temperature range.
- the hydraulic fluid may be cooled by doing so, and the cooling device may be stopped when the temperature of the hydraulic fluid is below the allowable temperature range.
- the electric working machine includes an inverter that adjusts the electric power supplied from the battery unit to the electric motor, a rotation speed detection device that detects the rotation speed of the electric motor, and a work operation member that operates the operation of the work device. and, the switching member includes an unloading operation member that can be operated to switch between a loading position that permits operation of the working device and an unloading position that does not permit operation of the working device, and The device may control the rotation speed of the electric motor by adjusting the power supplied from the inverter to the electric motor based on the rotation speed of the electric motor detected by the rotation speed detection device. .
- wasteful power consumption in the electric working machine can be reduced and work efficiency can be improved.
- FIG. 3 is a diagram showing an example of a control map for the rotation speed of an electric motor. It is a flowchart which shows the control operation of the rotation speed of an electric motor. It is a flowchart which shows the control operation of the rotation speed of an electric motor. It is a flowchart which shows the control operation of the rotation speed of an electric motor. It is a flowchart which shows the control operation of the rotation speed of an electric motor.
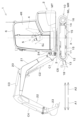
- FIG. 2 is an overall side view of the electric working machine.
- FIG. 5 is an overall side view of the electric working machine 1.
- the electric working machine 1 is an excavator called a backhoe.
- the electric working machine 1 includes a machine body (swivel base) 2, a traveling device 10, a working device 20, and the like. Further, the electric working machine 1 includes an electric motor 9 (FIG. 1) as a prime mover, and is operated by the power of the electric motor 9.
- a driver's seat 4 on which an operator (worker) is seated, and a protection mechanism 6 that protects the driver's seat 4 from the front, back, left and right, and above are provided on the body 2 of the electric working machine 1.
- the protection mechanism 6 is called a cabin.
- Each side of the protection mechanism 6 is provided with a transparent portion (so-called window) through which the surroundings can be viewed from the driver's seat 4.
- the protection mechanism 6 partitions the interior space where the driver's seat 4 is provided from the outside.
- An operating device 5 for operating the electric working machine 1 is provided around the driver's seat 4 inside the protection mechanism 6.
- the operator can operate the operating device 5 while seated in the driver's seat 4.
- the working device 20 side (direction of arrow A1 in FIG. 5) with respect to the protection mechanism 6 will be described as the front, and the opposite side (direction of arrow A2 in FIG. 5) will be described as the rear.
- the horizontal direction perpendicular to the front-rear direction will be referred to as the width direction.
- the left side will be described as the left side
- the right side will be referred to as the right side.
- the traveling device 10 supports the aircraft body 2 so that it can travel.
- the traveling device 10 includes a traveling frame (truck frame) 11 and a traveling mechanism 12.
- the traveling frame 11 is a structure around which the traveling mechanism 12 is attached and which supports the body 2 on the upper part.
- the traveling mechanism 12 is, for example, a crawler type traveling mechanism.
- the traveling mechanism 12 is provided on the left and right sides of the traveling frame 11, respectively.
- the traveling mechanism 12 includes an idler 13, a drive wheel 14, a plurality of rolling wheels 15, an endless crawler belt 16, and traveling motors ML and MR.
- the idler 13 is arranged at the front of the traveling frame 11.
- the drive wheels 14 are arranged at the rear of the traveling frame 11.
- the plurality of rolling wheels 15 are provided between the idler 13 and the drive wheel 14.
- the crawler belt 16 is wound around the idler 13, the drive wheel 14, and the wheel 15.
- the left travel motor ML is included in the travel mechanism 12 on the left side of the travel frame 11.
- the right travel motor MR is included in the travel mechanism 12 on the right side of the travel frame 11.
- These travel motors ML and MR are composed of hydraulic motors.
- the driving wheels 14 are rotationally driven by the power of the traveling motors ML and MR, and the crawler belt 16 is caused to circulate in the circumferential direction.
- a dozer device 18 is attached to the front of the traveling device 10.
- the dozer device 18 swings up and down by the expansion and contraction of the dozer cylinder C5.
- the dozer cylinder C5 is attached to the traveling frame 11.
- the dozer cylinder C5 is composed of a hydraulic cylinder.
- the body 2 is supported on a traveling frame 11 via a swing bearing 3 so as to be rotatable around a swing axis X.
- a swing motor MT is provided inside the fuselage 2.
- the swing motor MT is composed of a hydraulic motor (hydraulic actuator included in hydraulic equipment).
- the aircraft body 2 turns around the turning axis X by the power of the turning motor MT.
- the working device 20 is supported at the front of the machine body 2.
- the work device 20 includes a boom 21, an arm 22, a bucket (work tool) 23, and hydraulic cylinders C1 to C5.
- the base end side of the boom 21 is pivotally attached to a swing bracket 24 so as to be rotatable around a horizontal axis (an axis extending in the width direction of the body 2). Therefore, the boom 21 is able to swing vertically (vertically).
- the arm 22 is pivotally attached to the distal end side of the boom 21 so as to be rotatable about a horizontal axis. Therefore, the arm 22 can swing in the front-back direction or the up-down direction.
- the bucket 23 is provided on the tip side of the arm 22 so as to be capable of scooping and dumping operations.
- the swing bracket 24 swings left and right due to the expansion and contraction of the swing cylinder C1 provided inside the fuselage 2.
- the boom 21 swings up and down (back and forth) as the boom cylinder C2 expands and contracts.
- the arm 22 swings up and down (back and forth) due to the expansion and contraction of the arm cylinder C3.
- the bucket 23 performs a scooping operation and a dumping operation by expanding and contracting a bucket cylinder (work implement cylinder) C4.
- the swing cylinder C1, boom cylinder C2, arm cylinder C3, and bucket cylinder C4 are composed of hydraulic cylinders.
- the electric working machine 1 drives a traveling device 10 with traveling motors ML and MR, drives a working device 20 with hydraulic cylinders C1 to C5, and rotates the machine body 2 with a swing motor MT to perform work such as excavation.
- Hydraulic actuators such as travel motors ML and MR, swing motor MT, and hydraulic cylinders C1 to C5 are included in the hydraulic equipment.
- the traveling device 10 are working devices included in the electric working machine 1.
- the working device 20 and the traveling device 10 will be collectively referred to as "working devices 20, 10.”
- FIG. 1 is an electrical block diagram of the electric working machine 1.
- the control device 7 includes a CPU 7a and a storage section 7b.
- the CPU 7a controls the operation of each part included in the electric working machine 1 shown in FIG.
- the storage section 7b is composed of volatile memory, nonvolatile memory, and the like. Information, data, programs, etc. for the CPU 7a to control the operations of each section are stored in the storage section 7b in a readable and writable manner.
- the operating device 5 has operating members such as a work operating lever 5a, a traveling operating lever 5b, an unloading lever 5c, an accelerator dial 5d, and a mode selection SW (switch) 5e.
- the operating device 5 also includes a potentiometer, a switch, a sensor, or the like (not shown) for detecting whether or not each of the operating members 5a to 5e is operated, the operating position, or the operating amount.
- the work operation lever 5a is a member that operates the operation of the work device 20.
- the traveling operation lever 5b is a member that operates the traveling device 10.
- the work operation lever 5a and the traveling operation lever 5b are each shown as one block, but in reality, a plurality of each of the work operation lever 5a and the traveling operation lever 5b are provided. .
- the work operation lever 5a and the travel operation lever 5b are examples of the "work operation member" of the present invention.
- the unloading lever 5c can be switched between a loading position (first position) that allows the operation of the working device 20 and an unloading position (second position) that does not allow (prohibits) the operation of the working device 20. It is a great member.
- the unload lever 5c is installed, for example, on the side of the driver's seat 4 (FIG. 5) so as to be able to swing up and down.
- the unloading lever 5c is an example of the "unloading operation member" of the present invention. Further, the unload lever 5c is an example of a configuration included in the "switching member" of the present invention.
- the accelerator dial 5d is rotated to indicate the rotation speed of the electric motor 9.
- the angular range in which the accelerator dial 5d can be rotated corresponds to the instruction range in which the rotation speed of the electric motor 9 can be specified. Therefore, by changing the operation position of the accelerator dial 5d, the instruction value of the rotation speed of the electric motor 9 can also be changed.
- the control device 7 calculates the instruction value of the rotation speed of the electric motor 9 according to the operating state (whether or not the accelerator dial 5d is operated and the operating position) of the accelerator dial 5d.
- the accelerator dial 5d is an example of the "instruction member" of the present invention.
- the mode selection SW 5e selects either a normal mode (first mode) for controlling the drive of the electric motor 9 or an ECO mode (ecology mode, second mode) that reduces power consumption more than the normal mode. This is a switch operated to make a selection.
- the mode selection SW5e is an example of the "selection member" of the present invention.
- a starter SW (switch) 8 is provided inside the protection mechanism 6 and can be operated by an operator seated in the driver's seat 4. Starter SW8 is operated to start or stop electric working machine 1. Specifically, by turning on the starter SW8, the control device 7 starts each part of the electric working machine 1. Further, by turning off the starter SW8, the control device 7 stops each part of the electric working machine 1.
- the electric motor 9 is a drive source (an example of a prime mover) of the electric working machine 1, and is composed of, for example, a three-phase AC synchronous motor with an embedded permanent magnet.
- the inverter 38 is a motor drive device that drives the electric motor 9. Inverter 38 is connected to electric motor 9 and junction box 39.
- junction box 39 is connected to the battery unit 30, the DC-DC converter 40, and the charging port 41.
- Junction box 39 outputs the power output from battery unit 30 to inverter 38 and DC-DC converter 40.
- the inverter 38 converts the DC power input from the battery unit 30 via the junction box 39 into three-phase AC power, and supplies the three-phase AC power to the electric motor 9. As a result, the electric motor 9 is driven. Further, the inverter 38 can arbitrarily adjust the current and voltage of the electric power supplied to the electric motor 9.
- the control device 7 controls the operation of the inverter 38 to drive or stop the electric motor 9.
- the rotation speed detection device 42 includes a sensor, an encoder, a pulse generator, etc. that detects the rotation speed (actual rotation speed) of the electric motor 9.
- the control device 7 controls the driving of the electric motor 9 by the inverter 38 based on the rotation speed (actual rotation speed) of the electric motor 9 detected by the rotation speed detection device 42, for example. More specifically, the control device 7 determines whether the actual rotation speed of the electric motor 9 detected by the rotation speed detection device 42 matches the target rotation speed (a value indicated by the accelerator dial 5d or a predetermined rotation speed R1 to R3 described later). The drive of the electric motor 9 is controlled by the inverter 38 so as to do so.
- the DC-DC converter 40 is a voltage converter that converts the voltage of the direct current input from the battery unit 30 via the junction box 39 into a different voltage.
- the DC-DC converter 40 is a step-down converter that converts the high voltage of the battery unit 30 to a predetermined low voltage depending on the electrical components included in the electric working machine 1.
- the DC-DC converter 40 supplies power to the low voltage battery 33 after voltage conversion.
- Electrical components included in the electric working machine 1 include lighting, a heater, and the like in addition to the parts shown in FIG.
- the charging port 41 includes a connector (not shown) into which a charging cable (not shown) is fitted, and a connection detection device 41a.
- the charging port 41 is connected to an external power source (such as a commercial power source) via a charging cable.
- the connection detection device 41a includes a sensor and the like that detects that the charging cable is fitted into the charging port 41 and an external power source is connected.
- the junction box 39 outputs power input from the external power source through the charging port 41 via the charging cable to the battery unit 30.
- the battery unit 30 is charged with power input from the charging port 41 via the junction box 39 .
- the battery unit 30 has a plurality of battery packs 31 and 32.
- Each of the battery packs 31 and 32 is a secondary battery (storage battery) such as a lithium ion battery that includes at least one battery.
- the plurality of batteries are electrically connected in series and/or in parallel.
- the batteries constituting each of the battery packs 31 and 32 have a plurality of cells inside, and the plurality of cells are electrically connected in series and/or in parallel.
- Each of the battery packs 31 and 32 has an electrical capacity that allows each part of the electric working machine 1 to operate for a predetermined period of time.
- the battery packs 31 and 32 are connected in parallel.
- the battery unit 30 is provided with two battery packs 31 and 32, but the number of battery packs that the battery unit 30 has is not limited to two, and may be one or three or more. good.
- Each battery pack 31, 32 is provided with a connection switching section 31a, 32a.
- Each of the connection switching units 31a and 32a is composed of, for example, a relay or a switch, and can be switched between a connected state and a disconnected state.
- the control device 7 switches one of the connection switching units 31a and 32a to the connected state and the other connection switching unit to the disconnected state, thereby switching one of the plurality of battery packs 31 and 32. Power is output from one battery pack to the junction box 39, and power output from the other battery pack is stopped. That is, the control device 7 controls the output and stop of the power output of each battery pack 31, 32.
- control device 7 switches the connection state inside the junction box 39 to connect or disconnect the inverter 38, DC-DC converter 40, or charging port 41 to each battery pack 31, 32.
- Junction box 39 and connection switching units 31a and 32a are connection switching devices that switch connection and disconnection of inverter 38, DC-DC converter 40, and charging port 41 to each battery pack 31 and 32.
- each battery pack 31, 32 is provided with a BMU (battery management unit) 31b, 32b.
- BMU battery management unit
- the BMUs 31b and 32b are provided in the corresponding battery packs 31 and 32, but the BMUs 31b and 32b may be built in the corresponding battery packs 31 and 32, or It may be installed outside.
- the BMU 31b monitors and controls the corresponding battery pack 31.
- BMU 32b monitors and controls the corresponding battery pack 32.
- the BMUs 31b and 32b control opening and closing of relays provided inside the battery packs 31 and 32 to control start and stop of power supply from the battery packs 31 and 32.
- the BMUs 31b and 32b detect the temperature, voltage, and current of the battery packs 31 and 32, or the terminal voltages of internal cells.
- the BMUs 31b and 32b detect the remaining capacity (remaining power amount) of the battery packs 31 and 32 using a voltage measurement method, for example, based on the terminal voltage of the cells inside the battery packs 31 and 32.
- the method for detecting the remaining capacity of the battery packs 31 and 32 is not limited to the voltage measurement method, and may be other methods such as a coulomb counter method, a battery cell modeling method, an impedance track method, etc. .
- a capacity detection section for detecting the remaining capacity of the battery packs 31 and 32 may be provided separately from the BMUs 31b and 32b.
- the low voltage battery 33 is a storage battery with a lower voltage than the battery unit 30.
- the low voltage battery 33 is charged by power supplied from the DC-DC converter 40.
- the low-voltage battery 33 supplies power to electrical components included in the electric working machine 1 .
- the radiator 35 cools cooling water for cooling high heat generation electric devices such as the electric motor 9, the inverter 38, the DC-DC converter 40, and the battery unit 30.
- a high-heat-generating electrical device is an electrical device that generates higher heat than other electrical devices included in the electric working machine 1 by operating on electric power. Cooling water is not just water, but also a liquid that does not freeze, even in cold regions.
- the radiator 35 includes a fan motor 35a, and a radiator fan and a heat exchanger (not shown) that are rotationally driven by the power of the fan motor 35a.
- the fan motor 35a is driven by power from the low voltage battery 33.
- the cooling pump 36 is provided in a cooling water channel (not shown) disposed within the fuselage 2, together with the radiator 35 and the above-mentioned high heat generating electrical equipment.
- the cooling pump 36 discharges and circulates cooling water to the cooling water channel.
- the oil cooler 37 cools the hydraulic oil that has passed through hydraulic equipment such as the aforementioned hydraulic actuators ML, MR, MT, and C1 to C5, as well as hydraulic pumps P1, P2, and control valves CV (shown in FIG. 2, etc.) described later.
- the oil cooler 37 includes a fan motor 37a, and an oil cooler fan and a heat exchanger (not shown) that are rotationally driven by the power of the fan motor 37a.
- the fan motor 37a is driven by power from the low voltage battery 33.
- the oil cooler 37 is an example of the "cooling device" of the present invention.
- the display device 43 is composed of a liquid crystal display or a touch panel, and displays various information.
- the oil temperature detection device 44 includes a sensor that detects the temperature of hydraulic oil.
- hydraulic oil temperature the temperature of the hydraulic oil will be referred to as "hydraulic oil temperature.”
- the AI (auto idling)-SW (switch) 45 is composed of a pressure sensor that is activated by the hydraulic pressure of hydraulic oil.
- the AI-SW 45 is turned on when at least one of the working devices 20, 10 is operating, and is turned off when neither of the working devices 20, 10 is operating. That is, the AI-SW 45 detects whether the working devices 20, 10 are in operation.
- the AI-SW 45 is an example of the "work detection device" of the present invention.
- FIG. 2 is a diagram showing a hydraulic circuit K provided in the electric working machine 1.
- the hydraulic circuit K includes hydraulic actuators C1 to C5, ML, MR, MT, control valve CV, hydraulic pumps P1 and P2, hydraulic oil tank 48, oil cooler 37, operation valves PV1 to PV6, unload valve 58, and oil. Hydraulic equipment such as a passageway 50 is provided.
- These hydraulic pumps P1 and P2 are driven by the power of an electric motor 9.
- the hydraulic pump P1 for operation sucks the hydraulic oil stored in the hydraulic oil tank 48, and then discharges the hydraulic oil toward the control valve CV.
- one hydraulic pump P1 for operation is illustrated for convenience, but the hydraulic pump P1 for operation is not limited to this, and can supply hydraulic oil to each of the hydraulic actuators C1 to C5, ML, MR, and MT. An appropriate number may be provided.
- the control hydraulic pump P2 outputs hydraulic pressure for signals, control, etc. by suctioning and discharging hydraulic oil stored in the hydraulic oil tank 48. That is, the control hydraulic pump P2 supplies (discharges) pilot oil. An appropriate number of control hydraulic pumps P2 may also be provided.
- the control valve CV has a plurality of control valves V1 to V8.
- Each of the control valves V1 to V8 controls (adjusts) the flow rate of hydraulic oil output from the hydraulic pumps P1 and P2 to each of the hydraulic actuators C1 to C5, ML, MR, and MT.
- the swing control valve V1 controls the flow rate of hydraulic oil supplied to the swing cylinder C1.
- Boom control valve V2 controls the flow rate of hydraulic oil supplied to boom cylinder C2.
- Arm control valve V3 controls the flow rate of hydraulic oil supplied to arm cylinder C3.
- Bucket control valve V4 controls the flow rate of hydraulic oil supplied to bucket cylinder C4.
- Dozer control valve V5 controls the flow rate of hydraulic oil supplied to dozer cylinder C5.
- the left travel control valve V6 controls the flow rate of hydraulic oil supplied to the left travel motor ML.
- the right travel control valve V7 controls the flow rate of hydraulic oil supplied to the right travel motor MR.
- Swing control valve V8 controls the flow rate of hydraulic oil supplied to swing motor MT.
- the operation valves (remote control valves) PV1 to PV6 are operated in response to operation of operation levers 5a and 5b (FIG. 1) provided on the operation device 5.
- the pilot oil acts on each of the control valves V1 to V8 in proportion to the operating amount (operated amount) of each of the control valves PV1 to PV6, so that the spool of each of the control valves V1 to V8 moves straight.
- hydraulic oil at a flow rate proportional to the amount of movement of the spool of each control valve V1 to V8 is supplied to the hydraulic actuators C1 to C5, ML, MR, and MT to be controlled.
- each hydraulic actuator C1-C5, ML, MR, MT is driven according to the amount of hydraulic oil supplied from each control valve V1-V8.
- the oil passage 50 is composed of, for example, a hose or a pipe made of a material such as metal.
- the oil passage 50 is a flow passage that connects each part provided in the hydraulic circuit K and allows hydraulic oil or pilot oil to flow to each part.
- the oil passage 50 includes a first oil passage 51 , a second oil passage 52 , a first suction oil passage 54 , a second suction oil passage 55 , and a restriction oil passage 57 .
- the first suction oil passage 54 is a passage through which the hydraulic oil sucked from the hydraulic oil tank 48 by the hydraulic pump P1 for operation flows.
- the second suction oil passage 55 is a passage through which hydraulic oil sucked from the hydraulic oil tank 48 by the control hydraulic pump P2 flows.
- the first oil passage 51 is a flow passage through which hydraulic oil discharged by the hydraulic pump P1 for operation flows toward the control valves V1 to V8 of the control valve CV.
- the first oil passage 51 branches into a plurality of parts within the control valve CV and is connected to each of the control valves V1 to V8.
- the second oil passage 52 is a passage through which the hydraulic oil that has passed through the control valves V1 to V8 flows toward the hydraulic oil tank 48.
- the hydraulic oil tank 48 stores hydraulic oil.
- the second oil passage 52 includes a reciprocating oil passage 52a and a discharge oil passage 52b.
- a plurality of reciprocating oil passages 52a are provided so as to connect each control valve V1 to V8 and the hydraulic actuators C1 to C5, ML, MR, and MT to be controlled in pairs.
- the reciprocating oil passage 52a supplies hydraulic oil from the connected control valves V1 to V8 to the hydraulic actuators C1 to C5, ML, MR, and MT, and supplies hydraulic oil from the hydraulic actuators C1 to C5, ML, MR, and MT to the control valves V1 to V8.
- This is a flow path that returns hydraulic oil to the V8.
- One end of the discharge oil passage 52b branches into a plurality of branches and is connected to each of the control valves V1 to V8.
- the other end of the discharge oil path 52b is connected to the hydraulic oil tank 48.
- a part of the hydraulic oil that has flowed to any of the control valves V1 to V8 through the first oil passage 51 passes through the control valves V1 to V8, passes through one of the reciprocating oil passages 52a, and is directed to the hydraulic actuator to be controlled.
- Supplied to C1 to C5, ML, MR, and MT Supplied to C1 to C5, ML, MR, and MT.
- the hydraulic fluid discharged from the hydraulic actuators C1 to C5, ML, MR, and MT returns to the connected control valves V1 to V8 through the other side of the reciprocating oil passage 52a, and passes through the control valves V1 to V8.
- the discharge oil passage 52b flows.
- the other part of the hydraulic oil that has flowed to any of the control valves V1 to V8 through the first oil passage 51 is not supplied to the hydraulic actuators C1 to C5, ML, MR, and MT, and is not supplied to the control valve V1 to V8.
- ⁇ V8 and flows into the discharge oil path 52b.
- An oil cooler 37 is provided in the discharge oil path 52b. The oil cooler 37 cools the hydraulic oil flowing from any of the control valves V1 to V8 through the discharge oil path 52b.
- the hydraulic oil cooled by the oil cooler 37 returns to the hydraulic oil tank 48 through the discharge oil path 52b.
- the oil passages 54, 51, and 52 supply hydraulic oil to the hydraulic oil tank 48, the hydraulic pump P1, and the control valves V1 to V8 of the control valves CV (some of the hydraulic oil is supplied to the hydraulic actuators C1 to C5, ML). , MR, and MT).
- the restricted oil passage 57 is a passage through which the hydraulic oil discharged by the control hydraulic pump P2 flows to the operation valves PV1 to PV6.
- One end of the restriction oil passage 57 is connected to the control hydraulic pump P2, and the other end branches into a plurality of ports and is connected to the primary side ports (primary ports) of each of the operating valves PV1 to PV6.
- the restriction oil passage 57 is provided with an unload valve 58 consisting of a two-position switching valve.
- the unload valve 58 is switched to either the first position 58a or the second position 58b in conjunction with the operation of the unload lever 5c (FIG. 1).
- hydraulic oil is supplied from the operating hydraulic pump P1 to the hydraulic actuators C1 to C5, ML, MR, MT, and the hydraulic actuators C1 to C5, ML, MR, MT , the working device 20, and the traveling device 10 are permitted to operate.
- the unload valve 58 is switched to the first position (oil supply position, load position) 58a by the control device 7, and the control hydraulic pressure is
- the hydraulic oil discharged from the pump P2 to the restriction oil passage 57 is supplied to the control valves PV1 to PV6, and the control valves V1 to V8 become operable.
- the hydraulic actuators C1 to C5, ML, MR, MT, the working device 20, and the traveling device 10 can also be operated, and the operation of each of these parts C1 to C5, ML, MR, MT, 20, and 10 is permitted.
- the hydraulic oil discharged from the operation valves PV1 to PV6 returns to the hydraulic oil tank 48 through another discharge oil path (not shown).
- the unload valve 58 is switched to the second position (oil cutoff position, unload position) 58b by the control device 7, and the control
- the hydraulic oil discharged from the hydraulic pump P2 to the restricted oil passage 57 is no longer supplied to the control valves PV1 to PV6, and the control valves V1 to V8 become inoperable (operation prohibited state).
- the hydraulic actuators C1 to C5, ML, MR, MT, the working device 20, and the traveling device 10 are also rendered inoperable, and the operation of each of these parts C1 to C5, ML, MR, MT, 20, and 10 is permitted. It disappears.
- the unload lever 5c but also the unload valve 58 is an example of a configuration included in the "switching member" of the present invention.
- the hydraulic circuit K is provided with an operation detection oil passage (not shown) for detecting the operation state of the control valves V1 to V8.
- the operation detection oil path is an oil path that returns pilot oil discharged from the control hydraulic pump P2 to the hydraulic oil tank 48 through a plurality of switching valves for respectively switching the positions of the control valves V1 to V8. be.
- an AI-SW 45 (FIG. 1) is connected to the upstream side of the control valve V1 disposed closest to the control hydraulic pump P2 side.
- the AI-SW 45 When any of the control valves V1 to V8 is operated from the neutral position to the switching position, a part of the operation detection oil passage is shut off, and the pressure of the pilot oil in the operation detection oil passage increases to a certain degree ( (so-called pressurized state), the AI-SW 45 is turned on. That is, the AI-SW 45 detects that at least one of the working devices 20, 10 is in operation. In addition, when the control valves V1 to V8 are all in the neutral position, the operation detection oil passage is opened, so the pressure of the pilot oil in the operation detection oil passage does not rise to a certain level (so-called pressure rises). ), the AI-SW 45 is turned off. That is, the AI-SW 45 detects that the working devices 20 and 10 are not in operation.
- FIG. 3 is a diagram showing an example of a control map for the rotation speed of the electric motor 9.
- the control map in FIG. 3 graphically shows the correlation between the control value of the rotation speed of the electric motor 9 and the hydraulic oil temperature.
- the horizontal axis of the control map in FIG. 3 indicates the hydraulic oil temperature [° C.], and the vertical axis indicates the rotation speed [rpm] of the electric motor 9.
- Data representing the control map in FIG. 3 is stored in advance in the storage unit 7b (FIG. 1) of the control device 7.
- the control device 7 determines whether the hydraulic oil temperature T detected by the oil temperature detection device 44 is within one of the five predetermined temperature ranges IV shown in FIG. 3.
- the third temperature range III is an allowable temperature range, which is above a predetermined temperature T2 (for example, 30°C) and below a predetermined temperature T3 (for example, 87°C).
- the temperatures T2 and T3 and the allowable temperature range T2 to T3 are set, for example, to the hydraulic oil temperature and temperature range that allow each part of the electric working machine 1 to operate stably.
- the first temperature range I is set below a predetermined temperature T1 (for example, 2° C.).
- the second temperature range II is set to be above the temperature T1 and below the temperature T2.
- the fourth temperature range IV is set higher than the temperature T3 and below a predetermined temperature T4 (for example, 103° C.).
- Temperature T1 is an example of the "first temperature” of the present invention
- temperature T4 is an example of the "second temperature” of the present invention.
- the fourth temperature range IV is set higher than the temperature T4 (for example, 103° C.).
- the control device 7 controls the rotation speed R of the electric motor 9 within a predetermined range R1 to R5 according to the hydraulic oil temperature T, the unload lever 5c, and the state of the AI-SW 45 while the electric motor 9 is being driven. do.
- the first rotation speed R1 is a rotation speed (for example, 0 rpm) that corresponds to a stopped state of the electric motor 9.
- the second rotation speed R2 is the rotation speed (for example, 250 rpm) of the electric motor 9 at which the AI-SW 45 can generate hydraulic oil pressure that allows the AI-SW 45 to detect whether or not the working devices 20 and 10 are operated. More specifically, when at least one of the working devices 20 and 10 is activated, the AI-SW 45 is switched to the on state, and when the working devices 20 and 10 are not in operation, the AI-SW 45 is switched to the off state.
- the second rotation speed R2 is set to the rotation speed of the electric motor 9 to generate a hydraulic pressure higher than the minimum hydraulic oil pressure that can be changed.
- the third rotation speed R3 is the lower limit value (for example, 1,000 rpm) of the rotation speed of the electric motor 9 for performing work with the work devices 20 and 10. More specifically, the third rotation speed R3 is set to the rotation speed in a no-load state of the electric motor 9 that can immediately operate the working devices 20, 10 in response to the operation of the operating levers 5a, 5b. .
- the third rotation speed R3 is a rotation speed larger than the first rotation speed R1 and the second rotation speed R2, and is also an idling rotation speed.
- the second rotation speed R2 is higher than the first rotation speed R1 and smaller than the third rotation speed R3. Further, the second rotation speed R2 is also an idling rotation speed lower than the rotation speed of the electric motor 9 when working with the working devices 20, 10.
- the fifth rotation speed R5 is a predetermined maximum rotation speed (for example, 2,200 rpm) that can be set for the electric motor 9.
- the fourth rotation speed R4 is a rotation speed limited to be smaller than the fifth rotation speed R5, and is larger than the third rotation speed R3.
- the above-mentioned numerical values of temperatures T1 to T4 and rotational speeds R1 to R5 are merely examples, and are not limited to the above.
- the first rotation speed R1 corresponding to the stopped state of the electric motor 9 is not limited to 0 rpm, and may be an extremely small rotation speed, such as less than 1 rpm, for example.
- the control device 7 sets the rotation speed of the electric motor 9 to 0 rpm (first rotation speed)
- the control device 7 continues to supply power from the inverter 38 to the electric motor 9.
- the control device 7 may set the rotation speed of the electric motor 9 to 0 rpm by cutting off the power supply from the inverter 38 to the electric motor 9 and completely stopping the electric motor 9.
- FIGS. 4A to 4C are flowcharts showing the control operation of the rotation speed of the electric motor 9 in the electric working machine 1.
- a series of control operations shown in FIGS. 4A to 4C are executed by the CPU 7a (FIG. 1) of the control device 7 based on the software program stored in advance in the storage section 7b and the control map shown in FIG. 3.
- the rotation speed of the electric motor 9 will be referred to as "motor rotation speed.”
- the control device 7 When the starter SW 8 is turned on by the operator, the control device 7 starts the electric motor 9 using the inverter 38 . While the electric motor 9 is being driven, the control device 7 detects the hydraulic oil temperature T using the oil temperature detection device 44 (S1 in FIG. 4A).
- the control device 7 selects the mode using the mode selection SW5e (FIG. 1). Check the status. At this time, when the normal mode is selected by the mode selection SW 5e (S3 in FIG. 4A: NO), the control device 7 changes the instruction range Rrange of the motor rotation speed R by the accelerator dial 5d (FIG. 1) to the third The rotation speed is set to be at least R3 and not more than the fifth rotation speed R5 (S5 in FIG. 4A, circle S in allowable temperature range III in FIG. 3). That is, the control device 7 sets the third rotation speed R3 as the lower limit value of the instruction range Rrange of the motor rotation speed R by the accelerator dial 5d, and sets the fifth rotation speed R5 as the upper limit value.
- the control device 7 sets the instruction range Rrange of the motor rotation speed R by the accelerator dial 5d to a third rotation speed R3 or more. and the fourth rotation speed R4 or less (S4 in FIG. 4A, circle E in allowable temperature range III in FIG. 3). That is, the control device 7 sets the third rotation speed R3 as the lower limit value of the instruction range Rrange of the motor rotation speed R by the accelerator dial 5d, and sets the fourth rotation speed R4 as the upper limit value.
- the control device 7 when the AI-SW 45 is turned off for a predetermined period of time (for example, 4 seconds) or more because the working devices 20 and 10 have not operated for a predetermined period of time (for example, 4 seconds) or more (S6 in FIG. 4A: YES), the control device 7 , the motor rotation speed R is controlled to match the second rotation speed R2 (S7 in FIG. 4A, black circle mark of allowable temperature range III in FIG. 3). Processes S6 and S7 in FIG. 4A are so-called AI (auto idling) control.
- AI auto idling
- the control device 7 operates according to the operating position of the accelerator dial 5d.
- An instruction value of the motor rotation speed R is calculated, and the motor rotation speed R is changed to match the instruction value (S11 in FIG. 4A).
- the control device 7 calculates an instruction value of the motor rotation speed R according to the operation position of the accelerator dial 5d. Further, when the ECO mode is selected by the mode selection SW 5e, the control device 7 controls the operation position of the accelerator dial 5d within the instruction range Rrange (R3 to R4) set in step S4 of FIG. 4A. Calculate the indicated value of motor rotation speed R.
- the control device 7 determines that there is an instruction to stop the electric motor 9 (S12 in FIG. 4A: YES), and the inverter 38 starts supplying power to the electric motor 9. By stopping the electric motor 9, the drive of the electric motor 9 is stopped (S13 in FIG. 4A). As a result, the electric working machine 1 comes to a stopped state.
- the control device 7 determines that there is no instruction to stop the electric motor 9 (S12 in FIG. 4A: NO), and executes the process from step S1 again. In this case, the electric motor 9 is being driven.
- the control The device 7 further determines whether the hydraulic oil temperature T is in either temperature range I or II.
- the control device 7 checks the mode selection state by the mode selection SW5e. At this time, when the normal mode is selected by the mode selection SW5e (S16 in FIG. 4B: NO), the control device 7 sets the specified range Rrange of the motor rotation speed R by the accelerator dial 5d to a third rotation speed R3 or more. and the fifth rotation speed R5 or less (S18 in FIG. 4B, circle S in high temperature range II in FIG. 3).
- the control device 7 sets the specified range Rrange of the motor rotation speed R by the accelerator dial 5d to a third rotation speed R3 or more. and the fourth rotation speed R4 or less (S17 in FIG. 4B, circle E in high temperature range II in FIG. 3).
- the control device 7 controls the motor rotation speed R to match the third rotation speed R3 (S20 in FIG. 4B, (black circle mark in high temperature range II in Figure 3).
- the processes S19 and S20 in FIG. 4B are also AI controlled.
- the control device 7 controls the motor rotation speed R to match the third rotation speed R3. (S22 in FIG. 4B). That is, when the hydraulic oil temperature T is in the temperature range II lower than the allowable temperature range III, even if the operator switches the unload lever 5c to the unload position and indicates the intention not to operate the working devices 20, 10. , the control device 7 warms up the electric motor 9 by continuing to rotate the electric motor 9 at a third rotation speed R3 or higher and circulating the hydraulic oil without executing AS (auto stop) control. Processes S19 to S22 in FIG. 4B are so-called warm-up control.
- the control device 7 controls the motor rotation speed R according to the operating position of the accelerator dial 5d. An instruction value is calculated, and the motor rotation speed R is changed to match the instruction value (S11 in FIG. 4A).
- the control device 7 calculates an instruction value of the motor rotation speed R according to the operation position of the accelerator dial 5d. Furthermore, when the ECO mode is selected by the mode selection SW 5e, the control device 7 controls the operation position of the accelerator dial 5d within the instruction range Rrange (R3 to R4) set in step S17 of FIG. 4B. Calculate the indicated value of motor rotation speed R.
- the control device 7 selects between the normal mode and the ECO mode using the mode selection SW5e. Even if it is selected, the specified range Rrange of the motor rotation speed R by the accelerator dial 5d is set to the third rotation speed R3 or more and the fourth rotation speed R4 or less (S17 in FIG. 4B, extremely low temperature range in FIG. 3). S circle and E circle of I).
- the control device 7 controls the motor rotation speed R to match the third rotation speed R3 (S20 and S22 in FIG. 4B, black circles in the extremely low temperature range I in FIG. 3). That is, when the hydraulic oil temperature T is in the extremely low temperature range I, which is lower than the allowable temperature range III and the low temperature range II, the unload lever 5c is switched to the unload position, and the intention is not to operate the working devices 20 and 10. Even if this is indicated, the control device 7 does not perform AS (auto stop) control, but warms up the electric motor 9 by continuing to rotate the electric motor 9 at the third rotation speed R3 or higher and circulating the hydraulic oil. .
- the control device 7 controls the motor rotation speed R according to the operating position of the accelerator dial 5d.
- An instruction value is calculated, and the motor rotation speed R is changed to match the instruction value (S11 in FIG. 4A).
- the control device 7 calculates an instruction value of the motor rotation speed R according to the operation position of the accelerator dial 5d.
- the control The device 7 further determines whether the hydraulic oil temperature T is in either temperature range IV or V.
- the control device 7 confirms the mode selection state by the mode selection SW5e.
- the control device 7 sets the specified range Rrange of the motor rotation speed R by the accelerator dial 5d to a third rotation speed R3 or more. and the fifth rotation speed R5 or less (S26 in FIG. 4C, circle S in the high temperature range IV in FIG. 3).
- the control device 7 sets the specified range Rrange of the motor rotation speed R by the accelerator dial 5d to a third rotation speed R3 or higher. and the fourth rotation speed R4 or less (S25 in FIG. 4C, circle E in the high temperature range IV in FIG. 3).
- the control device 7 controls the motor rotation speed R to match the second rotation speed R2 (S28 in FIG. 4C, (black circle in high temperature range IV in Figure 3). Processes S27 and S28 in FIG. 4C are also controlled by AI.
- the control device 7 controls the motor rotation speed R to match the second rotation speed R2. (S30 in FIG. 4C, black circle in high temperature range IV in FIG. 3). That is, when the hydraulic oil temperature T is in the high temperature range IV which is higher than the allowable temperature range III, even if the unload lever 5c is switched to the unload position and the intention is not to operate the working devices 20, 10, The control device 7 does not perform AS (auto stop) control, continues to rotate the electric motor 9 at a second rotation speed R2 smaller than the third rotation speed R3, and circulates the hydraulic oil to cool the hydraulic oil. I do. Processes S27 to S30 in FIG. 4C are so-called cooling control.
- the control device 7 controls the motor rotation speed R according to the operating position of the accelerator dial 5d. An instruction value is calculated, and the motor rotation speed R is changed to match the instruction value (S11 in FIG. 4A).
- the control device 7 calculates an instruction value of the motor rotation speed R according to the operation position of the accelerator dial 5d. Further, when the ECO mode is selected by the mode selection SW 5e, the control device 7 controls the operation position of the accelerator dial 5d within the instruction range Rrange (R3 to R4) set in step S25 of FIG. 4C. Calculate the indicated value of motor rotation speed R.
- the control device 7 selects between the normal mode and the ECO mode using the mode selection SW5e. Even if it is selected, the upper and lower limits of the specified range Rrange of the motor rotation speed R by the accelerator dial 5d are set to the third rotation speed R3 (S31 in FIG. 4C, S of the extremely high temperature range V in FIG. 3). circle mark and E circle mark). That is, when the hydraulic oil temperature T is within the extremely high temperature range V, the designated range Rrange of the motor rotation speed R by the accelerator dial 5d is set to a constant third rotation speed R3. Therefore, even if the accelerator dial 5d is operated from the neutral position to any position, the indicated value of the motor rotation speed R becomes the third rotation speed R3, and the rotation speed R of the electric motor 9 is limited to the third rotation speed R3. be done.
- the control device 7 controls the motor rotation speed R to match the second rotation speed R2 (S30 in FIG. 4C, black circle mark in the extremely high temperature range V in FIG. 3). That is, when the hydraulic oil temperature T is in the extremely high temperature range V, even if the unload lever 5c is switched to the unload position and the intention is not to operate the working devices 20, 10, the control device 7 The hydraulic oil is cooled by continuing to rotate the electric motor 9 at the second rotation speed R2 and circulating the hydraulic oil without executing AS control.
- the control device 7 calculates the indicated value of the motor rotation speed R, and The motor rotation speed R is changed to match the value (S11 in FIG. 4A). At this time, since the hydraulic oil temperature T is in the extremely high temperature range V, the control device 7 selects the mode set in step S31 of FIG. A constant value R3 is determined as an instruction value of the motor rotation speed R.
- the control device 7 controls the fan of the oil cooler 37 when controlling the motor rotation speed R to match the second rotation speed R2.
- the hydraulic oil may be cooled by rotating the motor 37a at a predetermined rotation speed. That is, when the working devices 20, 10 are not operating, the oil cooler 37 is driven to cool the hydraulic oil while rotating the electric motor 9 at the second rotation speed R2.
- the control device 7 stops the oil cooler 37 and controls the power consumption when controlling the motor rotation speed R to match the third rotation speed R3. It may also be possible to reduce the temperature and promote the warm-up of the hydraulic oil. Furthermore, even when the hydraulic oil temperature T is within the allowable temperature range III, the control device 7 controls the oil temperature when controlling the motor rotation speed R to match the first rotation speed R1 or the second rotation speed R2. The cooler 37 may be stopped to reduce power consumption.
- the temperature range of the hydraulic oil temperature T was divided into five, first to fifth temperature ranges I to V, but the present invention is not limited to this.
- the temperature range of the hydraulic oil temperature T may be divided into two parts: within the permissible temperature range and outside the permissible temperature range.
- the temperature range of the hydraulic oil temperature T may be divided into three parts: within the permissible temperature range, a temperature range lower than the permissible temperature range, and a temperature range higher than the permissible temperature range.
- the temperature range of the hydraulic oil temperature T may be divided into four or six or more.
- the motor rotation speed R when performing AI control in each temperature range not only the second rotation speed R2 and the third rotation speed R3, but also three or more predetermined rotation speeds may be set. .
- the control device 7 may change the second to fourth rotation speeds R2 to R4 depending on the remaining capacity of the battery packs 31 and 32 provided in the battery unit 30. Specifically, the smaller the remaining capacity of the battery packs 31, 32, the smaller at least one of the second to fourth rotational speeds R2 to R4 may be changed.
- the work operation lever 5a and the traveling operation lever 5b are used as the work operation members
- the unload lever 5c is used as the switching member and the unload operation member
- the mode selection SW 5e is used as the selection member.
- the accelerator dial 5d is used as the instruction member
- various operating members such as levers, joysticks, slide switches, tumbler switches, push buttons, dials, or keys can be used as working operating members, switching members, unloading operating members, selection members, and instruction members.
- a mechanically operated valve or an electrically operated solenoid valve may be used as the unload valve 58.
- the AI-SW 45 consisting of a pressure switch was used as the work detection device, but the invention is not limited to this.
- a potentiometer, a sensor, a switch, or the like that detects whether or not the work operation lever 5a and the traveling operation lever 5b are operated may be used as the work detection device.
- the electric working machine 1 of this embodiment has the following configuration and produces effects.
- the electric working machine 1 of this embodiment includes a machine body 2, a battery unit 30 mounted on the machine body 2, an electric motor 9 driven by electric power from the battery unit 30, and a hydraulic pressure operated by the power from the electric motor 9.
- Equipment hydraulic motors ML, MR, MT, hydraulic cylinders C1 to C5, hydraulic pumps P1, P2, control valve CV
- work devices 20, 10 work device 20 operated by hydraulic pressure of hydraulic oil supplied from the hydraulic equipment.
- a traveling device 10 a control device 7 that controls the drive of the electric motor 9, and either a first position in which the operation of the working devices 20, 10 is permitted or a second position in which the operation of the working devices 20, 10 is not permitted.
- the control device 7 includes switching members 5c and 58 (unload lever 5c, unload valve 58) that can be switched to During operation, when the switching members 5c and 58 are switched to the second position and the temperature T of the hydraulic oil is within a predetermined allowable temperature range III (predetermined temperatures T2 to T3), which is neither a low temperature nor a high temperature, the electric The rotation speed R of the motor 9 is controlled to a predetermined first rotation speed R1 corresponding to the stopped state of the electric motor 9.
- a predetermined allowable temperature range III predetermined temperatures T2 to T3
- the temperature T of the hydraulic fluid is within the allowable range. If the temperature is within the temperature range III, the rotation speed R of the electric motor 9 decreases to the first rotation speed R1 corresponding to the stopped state. Therefore, it is possible to suppress the electric power of the battery unit 30 from being wasted by the electric motor 9, and it is possible to reduce wasted power consumption in the electric working machine 1 and improve work efficiency.
- the rotation speed R of the electric motor 9 is set to the first rotation speed R1. If the electric motor 9 is not controlled, the electric motor 9 will not come to a complete stop and will continue to rotate, so the hydraulic oil will be circulated by hydraulic equipment such as hydraulic pumps P1 and P2 to warm up or cool the hydraulic oil. This makes it possible to improve work efficiency.
- the rotation speed R of the electric motor 9 is changed. Control is performed to predetermined idling rotation speeds R2 and R3 that are larger than the first rotation speed R1 and less than or equal to the lower limit value of the rotation speed when working with the working devices 20 and 10.
- the rotation speed R of the electric motor 9 changes to the first rotation depending on whether the temperature T of the hydraulic oil is within the allowable temperature range III. Since the rotational speed is reduced to the number R1 or the idling rotational speed R2, R3, unnecessary power consumption can be reduced. Further, by reducing unnecessary power consumption, the operating time of the working devices 20 and 10 can be extended, and working efficiency can be improved.
- the control device 7 controls the The rotational speed R of the motor 9 is controlled to match the predetermined third rotational speed R3 at which the working devices 20 and 10 are in an idling state, and if the temperature T of the hydraulic oil is higher than the allowable temperature range III, the electric motor 9 is controlled to match a predetermined second rotation speed R2 which is larger than the first rotation speed R1 and smaller than the third rotation speed R3.
- the rotation speed R of the electric motor 9 decreases to the third rotation speed R3. Warm-up can be achieved by reducing wasteful power consumption, operating hydraulic equipment such as hydraulic pumps P1 and P2, and circulating hydraulic oil, and also shortening the time required for warm-up. Further, when the switching members 5c and 58 are switched to the second position and the temperature T of the hydraulic oil is higher than the allowable temperature range III, the rotation speed R of the electric motor 9 is set to a second rotation speed smaller than the third rotation speed R3. Since the temperature decreases to R2, wasteful power consumption can be reduced and cooling can be achieved by circulating the hydraulic oil.
- the electric working machine 1 includes a work detection device (AI-SW) 45 that is operated by hydraulic pressure of hydraulic oil to detect whether or not the work devices 20 and 10 are operated, and has a second rotation speed.
- R2 is set to the rotational speed R of the electric motor 9 at which the work detecting device 45 can generate hydraulic oil pressure that allows the work detection device 45 to detect whether or not the work device is in operation. Thereby, even if the rotational speed R of the electric motor 9 is lowered to the second rotational speed R2, the work detection device 45 can detect whether or not the working devices 20 and 10 are in operation.
- the control device 7 controls the operation of the hydraulic oil when the switching members 5c, 58 are in the first position while the electric motor 9 is being driven, and the working devices 20, 10 are not operated for a predetermined period of time or more. If the temperature T of the hydraulic fluid is lower than the allowable temperature range III, the rotation speed R of the electric motor 9 is controlled to match the third rotation speed R3, and if the temperature T of the hydraulic oil is higher than the allowable temperature range III, the electric motor 9 is controlled to match the third rotation speed R3. 9 is controlled to match the second rotation speed R2.
- the rotation speed R of the electric motor 9 is changed to the third rotation speed R3 or the third rotation speed R3 depending on the level of the temperature T of the hydraulic oil with respect to the allowable temperature range III. Warming up or cooling can be performed by lowering the rotation speed to 2 R2 to reduce wasteful power consumption and circulating the hydraulic oil.
- the electric working machine 1 includes an instruction member (accelerator dial) 5d that is operated to instruct the rotation speed R of the electric motor 9, and the control device 7 instructs the rotation speed R by operating the instruction member 5d.
- a possible rotational speed R of the electric motor 9 is set according to the temperature T of the hydraulic oil.
- the control device 7 calculates an instruction value for the rotation speed R of the electric motor 9 according to the operating state of the instruction member 5d, and controls the electric motor so that it matches the instruction value. The rotation speed R of the motor 9 is controlled.
- the rotation speed R of the electric motor 9 can be controlled according to the operation state of the instruction member 5d and the temperature T of the hydraulic oil, and the hydraulic oil can be circulated at an appropriate flow rate and pressure, and the working device 20 , 10 can be operated stably.
- the control device 7 also controls the maximum rotation speed, which is the upper limit of the settable rotation speed of the electric motor 9, from the third rotation speed R3 of the electric motor 9 at which the working devices 20, 10 are in an idling state.
- An instruction range Rrange of the rotation speed R of the electric motor 9 that can be specified by operating the instruction member 5d within a range up to the rotation speed (fifth rotation speed) R5 is set according to the temperature T of the hydraulic oil. Thereby, the rotation speed R of the electric motor 9 can be changed within an appropriate range depending on the operating state of the instruction member 5d and the temperature T of the hydraulic oil.
- the electric working machine 1 also includes a selection member (mode When the temperature T of the hydraulic oil is within the allowable temperature range III, the control device 7 controls the operation of the electric motor 9 by operating the instruction member 5d when the second mode is selected by the selection member 5e.
- the upper limit value of the instruction range Rrange of the rotation speed R is set smaller than the upper limit value of the instruction range Rrange when the first mode is selected by the selection member 5e.
- the control device 7 selects either the first mode or the second mode using the selection member 5e.
- the upper limit value of the instruction range Rrange of the rotation speed R of the electric motor 9 is set to a value smaller than the maximum rotation speed R5.
- the maximum rotation speed R5 is, for example, the rotation speed of the electric motor 9 that can be specified by the instruction member 5d when the temperature T of the hydraulic oil is within the allowable temperature range III and the first mode is selected by the selection member 5e.
- the control device 7 selects which of the first mode and the second mode is selected by the selection member 5e. Even if it is selected, the rotation speed R of the electric motor 9 that can be instructed by the instruction member 5d (the upper limit value and the lower limit value of the instruction range Rrange) is set to the third rotation speed R3.
- the temperature T of the hydraulic oil is in the extremely high temperature range V, it is possible to prevent the hydraulic oil in a high temperature state from flowing and causing wear or damage to the hydraulic equipment or the oil passage.
- the electric working machine 1 includes a cooling device (oil cooler) 37 that cools the hydraulic oil, and the control device 7 determines that the temperature T of the hydraulic oil detected by the oil temperature detection device 44 is an allowable temperature.
- the cooling device 37 is driven to cool the hydraulic oil, and when the temperature T of the hydraulic oil is below the allowable temperature range III, the cooling device 37 is stopped.
- the electric motor 9 is switched to a low speed.
- the electric working machine 1 includes an inverter 38 that adjusts the power supplied from the battery unit 30 to the electric motor 9, a rotation speed detection device 42 that detects the rotation speed R of the electric motor 9, and a working device. 20, 10, and the switching members 5c, 58 permit the operation of the working devices 20, 10.
- the control device 7 includes an unloading operation member 5c that can be operated to switch between a loading position and an unloading position that does not permit operation of the working devices 20 and 10.
- the rotation speed R of the electric motor 9 is controlled by adjusting the electric power supplied from the inverter 38 to the electric motor 9 based on the rotation speed R of the electric motor 9 .
- the rotation speed R of the electric motor 9 can be reliably set to a value indicated by the instruction member 5d or to a predetermined rotation speed R1 to R3.
- the AI-SW 45 can detect whether or not the work operation members 5a, 5b are operated, which corresponds to the operation or absence of the work devices 20, 10.
- the rotation speed R of the electric motor 9 is controlled to the first rotation speed R1, so that the electric power is supplied from the battery unit 30 to the electric motor 9.
- the rotational speed R of the electric motor 9 is subsequently increased, the power consumption can be reduced and the responsiveness of the electric motor 9 can be improved, compared to when the power supply to the electric motor 9 is cut off.
- an electric working machine 1 such as a backhoe
- the present invention is not limited to this, and for example, a wheel loader, a compact track loader, a skid steer loader, etc. It may also be applied to other construction machines such as tractors, combines, rice transplanters, lawn mowers, and other agricultural machines.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Operation Control Of Excavators (AREA)
Abstract
電動作業機(1)は、機体(2)と、前記機体に搭載されたバッテリユニット(30)と、前記バッテリユニットからの電力により駆動される電動モータ(9)と、前記電動モータからの動力により作動する油圧機器と、前記油圧機器から供給された作動油の油圧により作動する作業装置(20、10)と、前記電動モータの駆動を制御する制御装置(7)と、前記作業装置の作動を許可する第1位置と前記作業装置の作動を許可しない第2位置のいずれかに切り換え可能な切換部材(5c、58)と、前記作動油の温度(T)を検出する油温検出装置(44)と、を備え、前記制御装置(7)は、前記電動モータの駆動中に、前記切換部材が前記第2位置に切り換えられ、且つ前記作動油の温度が低温状態でも高温状態でもない所定の許容温度範囲内にある場合、前記電動モータの回転数(R)を前記電動モータの停止状態に相当する所定の第1回転数(R1)に制御する。
Description
本発明は、電動モータの動力により駆動する電動作業機に関する。
例えば特許文献1には、電動モータの動力により駆動する電動作業機が開示されている。特許文献1に開示された電動作業機は、バッテリユニットが出力する電力によって駆動される電動モータと、電動モータによって駆動されて作動油を吐出する油圧ポンプと、油圧ポンプが吐出した作動油によって駆動される油圧機器と、油圧機器によって動作する作業装置と、油圧機器を操作する操作装置と、電動モータの回転数を制御する制御装置などを備えている。制御装置は、バッテリユニットからの出力電流値が所定値以上である場合に、操作装置の操作に応じて電動モータの回転数を設定し、バッテリユニットからの出力電流値が所定値未満である場合に、電動モータの回転数を所定のアイドリング回転数に設定する。
オペレータが電動作業機を操作しないときに、電動モータが回転駆動していると、電力が無駄に消費されて、電動作業機の作業効率が低下してしまう。
本発明は、上記従来技術の問題点を解決すべくなされたものであって、電動作業機において無駄な消費電力を低減し、作業効率を向上させることを目的とする。
本発明の一態様に係る電動作業機は、機体と、前記機体に搭載されたバッテリユニットと、前記バッテリユニットからの電力により駆動される電動モータと、前記電動モータからの動力により作動する油圧機器と、前記油圧機器から供給された作動油の油圧により作動する作業装置と、前記電動モータの駆動を制御する制御装置と、前記作業装置の作動を許可する第1位置と前記作業装置の作動を許可しない第2位置のいずれかに切り換え可能な切換部材と、前記作動油の温度を検出する油温検出装置と、を備え、前記制御装置は、前記電動モータの駆動中に、前記切換部材が前記第2位置に切り換えられ、且つ前記作動油の温度が低温状態でも高温状態でもない所定の許容温度範囲内に有る場合、前記電動モータの回転数を前記電動モータの停止状態に相当する所定の第1回転数に制御する。
前記制御装置は、前記電動モータの駆動中に、前記切換部材が前記第2位置に切り換えられ、且つ前記作動油の温度が前記許容温度範囲内にない場合、前記電動モータの回転数を前記第1回転数より大きく、且つ前記作業装置により作業を行うときの回転数の下限値以下である所定のアイドリング回転数に制御してもよい。
前記制御装置は、前記電動モータの駆動中に、前記切換部材が前記第2位置に切り換えられた場合、前記作動油の温度が前記許容温度範囲より低ければ、前記電動モータの回転数を所定の第3回転数に一致するように制御し、前記作動油の温度が前記許容温度範囲より高ければ、前記電動モータの回転数を前記第1回転数より大きくて前記第3回転数より小さい所定の第2回転数に制御してもよい。
前記電動作業機は、前記作動油の油圧により前記作業装置の作動の有無を検出する作業検出装置を備え、前記第2回転数は、前記作業検出装置が前記作業装置の作動の有無を検出可能な前記作動油の油圧を生じさせることができる回転数に設定されていてもよい。
前記制御装置は、前記電動モータの駆動中に、前記切換部材が前記第1位置に有り、且つ前記作業装置が所定時間以上作動しなかった場合、前記作動油の温度が前記許容温度範囲より低ければ、前記電動モータの回転数を前記第3回転数に一致するように制御し、前記作動油の温度が前記許容温度範囲以上であれば、前記電動モータの回転数を前記第2回転数に制御してもよい。
前記電動作業機は、前記電動モータの回転数を指示するために操作される指示部材を備え、前記制御装置は、前記指示部材の操作により指示可能な前記電動モータの回転数を前記作動油の温度に応じて設定してもよい。
前記電動作業機は、第1モードと当該第1モードよりも消費電力を低減する第2モードとのいずれかを選択する選択部材を備え、前記制御装置は、前記作動油の温度が前記許容温度範囲内にある場合、前記第2モードが前記選択部材により選択されたときの前記指示部材の操作による前記電動モータの回転数の前記指示範囲の上限値を、前記第1モードが前記選択部材により選択されたときの前記指示範囲の上限値より小さく設定してもよい。
前記制御装置は、前記作動油の温度が前記許容温度範囲より低い所定の第1温度未満である場合、前記第1モードと前記第2モードのいずれが前記選択部材により選択されても、前記指示部材の操作による前記電動モータの回転数の前記指示範囲の上限値を所定の最大回転数より小さい値に設定し、前記最大回転数は、前記作動油の温度が前記許容温度範囲内にあり且つ前記第1モードが選択されている場合に、前記指示部材により指示可能な回転数の上限値であってもよい。
前記制御装置は、前記作動油の温度が前記許容温度範囲より高い所定の第2温度よりも高いときに、前記第1モードと前記第2モードのいずれが前記選択部材により選択されても、前記指示部材により指示可能な回転数を前記第3回転数に設定してもよい。
前記電動作業機は、前記作動油を冷却する冷却装置を備え、前記制御装置は、油温検出装置により検出された前記作動油の温度が前記許容温度範囲より高いときに、前記冷却装置を駆動することにより前記作動油を冷却し、前記作動油の温度が前記許容温度範囲以下のときに、前記冷却装置を停止してもよい。
前記電動作業機は、前記バッテリユニットから前記電動モータに供給する電力を調整するインバータと、前記電動モータの回転数を検出する回転数検出装置と、前記作業装置の作動を操作する作業用操作部材と、を備え、前記切換部材は、前記作業装置の作動を許可するロード位置と前記作業装置の作動を許可しないアンロード位置のいずれかに切り換え操作可能なアンロード用操作部材を含み、前記制御装置は、前記回転数検出装置により検出された前記電動モータの回転数に基づいて、前記インバータから前記電動モータに供給する電力を調整することで、前記電動モータの回転数を制御してもよい。
上記構成によれば、電動作業機において無駄な消費電力を低減し、作業効率を向上させることができる。
以下、本発明の一実施形態について、図面を参照しながら説明する。
先ず、本実施形態の電動作業機1の全体構成について説明する。図5は、電動作業機1の全体側面図である。電動作業機1は、バックホーと呼ばれる掘削機である。電動作業機1は、機体(旋回台)2、走行装置10、作業装置20などを備えている。また、電動作業機1は、原動機として電動モータ9(図1)を備え、当該電動モータ9の動力により動作する。
電動作業機1の機体2の上には、オペレータ(作業者)が着座する運転席4と、運転席4を前後、左右、及び上から保護する保護機構6が設けられている。保護機構6は、キャビンと呼ばれている。保護機構6の各側面には、運転席4から周囲を目視可能な透明部分(いわゆる窓)が設けられている。保護機構6は、運転席4が設けられた内部空間と外部とを仕切っている。
保護機構6の内部の運転席4の周囲には、電動作業機1を操作するための操作装置5が設けられている。オペレータは、運転席4に着座した状態で、操作装置5を操作可能である。本実施形態では、保護機構6に対して作業装置20側(図5の矢印A1方向)を前方、この反対側(図5の矢印A2方向)を後方として説明する。また、その前後方向に直交する水平方向を幅方向として説明する。さらに、前方A1に向いた状態で、左側を左方、右側を右方として説明する。
走行装置10は、機体2を走行可能に支持している。走行装置10は、走行フレーム(トラックフレーム)11と走行機構12とを有している。走行フレーム11は、周囲に走行機構12を取り付け、且つ上部に機体2を支持する構造体である。走行機構12は、例えばクローラ式の走行機構である。走行機構12は、走行フレーム11の左側と右側にそれぞれ設けられている。走行機構12は、アイドラ13と、駆動輪14と、複数の転輪15と、無端状のクローラベルト16と、走行モータML、MRとを有している。
アイドラ13は、走行フレーム11の前部に配置されている。駆動輪14は、走行フレーム11の後部に配置されている。複数の転輪15は、アイドラ13と駆動輪14との間に設けられている。クローラベルト16は、アイドラ13、駆動輪14、及び転輪15に亘って巻掛けられている。
左用走行モータMLは、走行フレーム11の左側にある走行機構12に含まれている。右用走行モータMRは、走行フレーム11の右側にある走行機構12に含まれている。これら走行モータML、MRは、油圧モータから構成されている。各走行機構12では、走行モータML、MRの動力により、駆動輪14が回転駆動して、クローラベルト16を周方向に循環回走させる。
走行装置10の前部には、ドーザ装置18が装着されている。ドーザ装置18は、ドーザシリンダC5の伸縮によって上下に揺動する。ドーザシリンダC5は、走行フレーム11に取り付けられている。ドーザシリンダC5は、油圧シリンダから構成されている。
機体2は、走行フレーム11上に旋回ベアリング3を介して、旋回軸心X回りに回転可能に支持されている。機体2の内部には、旋回モータMTが設けられている。旋回モータMTは、油圧モータ(油圧機器に含まれる油圧アクチュエータ)から構成されている。機体2は、旋回モータMTの動力により旋回軸心X回りに旋回する。
作業装置20は、機体2の前部に支持されている。作業装置20は、ブーム21と、アーム22と、バケット(作業具)23と、油圧シリンダC1~C5を有する。ブーム21の基端側は、スイングブラケット24に横軸(機体2の幅方向に延伸する軸心)廻りに回動可能に枢着されている。このため、ブーム21は上下方向(鉛直方向)に揺動可能になっている。アーム22は、ブーム21の先端側に横軸廻りに回動可能に枢着されている。このため、アーム22は、前後方向或いは上下方向に揺動可能になっている。バケット23は、アーム22の先端側にスクイ動作及びダンプ動作が可能に設けられている。
バケット23に代えて、或いはバケット23に加えて、油圧アクチュエータにより駆動可能な他の作業具(油圧アタッチメント)をアーム22の先端部に装着することが可能である。他の作業具として、油圧ブレーカ、油圧圧砕機、アングルブルーム、アースオーガ、パレットフォーク、スイーパー、モア、スノーブロアなどを例示することができる。
スイングブラケット24は、機体2内に備えられたスイングシリンダC1の伸縮によって左右に揺動する。ブーム21は、ブームシリンダC2の伸縮によって上下(前後)に揺動する。アーム22は、アームシリンダC3の伸縮によって上下(前後)に揺動する。バケット23は、バケットシリンダ(作業具シリンダ)C4の伸縮によってスクイ動作及びダンプ動作を行う。スイングシリンダC1、ブームシリンダC2、アームシリンダC3、及びバケットシリンダC4は、油圧シリンダから構成されている。
電動作業機1は、走行モータML、MRにより走行装置10を駆動し、油圧シリンダC1~C5により作業装置20を駆動し、旋回モータMTにより機体2を旋回させて、掘削などの作業を行う。走行モータML、MR、旋回モータMT、及び油圧シリンダC1~C5といった油圧アクチュエータは、油圧機器に含まれる。作業装置20だけでなく走行装置10も、電動作業機1に備わる作業装置である。以下、便宜上、作業装置20及び走行装置10を、まとめて「作業装置20、10」と言う。
次に、電動作業機1の電気的構成について説明する。図1は、電動作業機1の電気ブロック図である。図1において、制御装置7は、CPU7aと記憶部7bとを有している。CPU7aは、図1に示す電動作業機1に備わる各部の動作を制御する。記憶部7bは揮発性メモリ及び不揮発性メモリなどから構成されている。CPU7aが各部の動作を制御するための情報、データ、及びプログラムなどは、記憶部7bに読み書き可能に記憶されている。
操作装置5は、作業用操作レバー5a、走行用操作レバー5b、アンロードレバー5c、アクセルダイヤル5d、及びモード選択SW(スイッチ)5eなどの操作部材を有している。また、操作装置5は、各操作部材5a~5eの操作の有無、操作位置、若しくは操作量を検出するための、ポテンションメータ、スイッチ、又はセンサなど(図示省略)も有している。
作業用操作レバー5aは、作業装置20の作動を操作する部材である。走行用操作レバー5bは、走行装置10の作動を操作する部材である。図1では、便宜上、作業用操作レバー5aと走行用操作レバー5bをそれぞれ1つのブロックで示しているが、実際には、作業用操作レバー5aと走行用操作レバー5bはそれぞれ複数設けられている。作業用操作レバー5a及び走行用操作レバー5bは、本発明の「作業用操作部材」の一例である。
アンロードレバー5cは、作業装置20の作動を許可するロード位置(第1位置)と、作業装置20の作動を許可しない(禁止する)アンロード位置(第2位置)のいずれかに切り換え操作可能な部材である。アンロードレバー5cは、例えば運転席4(図5)の側方に、上下へ揺動可能に設置されている。
アンロードレバー5cを下方へ揺動させて、ロード位置(第1位置、下降位置)に位置させることで、オペレータが運転室4Rに対して乗降する通路が閉鎖される。アンロードレバー5cを上方へ揺動させて、アンロード位置(第2位置、上昇位置)に位置させることで、上記通路が開放される。アンロードレバー5cは、本発明の「アンロード用操作部材」の一例である。また、アンロードレバー5cは、本発明の「切換部材」に含まれる構成の一例である。
アクセルダイヤル5dは、電動モータ9の回転数を指示するために回転操作される。アクセルダイヤル5dを回転操作可能な角度範囲が電動モータ9の回転数を指示可能な指示範囲に対応している。このため、アクセルダイヤル5dの操作位置を変更することで、電動モータ9の回転数の指示値も変更することができる。詳しくは、制御装置7が、アクセルダイヤル5dの操作状態(操作の有無と操作位置)に応じて、電動モータ9の回転数の指示値を演算する。アクセルダイヤル5dは、本発明の「指示部材」の一例である。
モード選択SW5eは、電動モータ9の駆動を制御するための、通常モード(第1モード)と、当該通常モードよりも消費電力を低減するECOモード(エコロジーモード、第2モード)とのいずれかを選択するために操作されるスイッチである。モード選択SW5eは、本発明の「選択部材」の一例である。
スタータSW(スイッチ)8は、保護機構6の内部に設けられ、運転席4に着座したオペレータが操作可能になっている。スタータSW8は、電動作業機1を始動させたり停止させたりするために操作される。詳しくは、スタータSW8をオン操作することで、制御装置7が電動作業機1に備わる各部を始動させる。また、スタータSW8をオフ操作することで、制御装置7が電動作業機1に備わる各部を停止させる。
電動モータ9は、電動作業機1の駆動源(原動機の一例)であって、例えば永久磁石埋込式の三相交流同期モータから構成されている。インバータ38は、電動モータ9を駆動させるモータ駆動装置である。インバータ38は、電動モータ9及びジャンクションボックス39と接続されている。
ジャンクションボックス39は、インバータ38の他に、バッテリユニット30とDC-DCコンバータ40と充電口41とに接続されている。ジャンクションボックス39は、バッテリユニット30から出力された電力をインバータ38やDC-DCコンバータ40に出力する。
インバータ38は、バッテリユニット30からジャンクションボックス39を経由して入力された直流電力を三相交流電力に変換し、当該三相交流電力を電動モータ9に供給する。これにより、電動モータ9が駆動する。また、インバータ38は、電動モータ9に供給する電力の電流や電圧を任意に調整可能である。制御装置7は、インバータ38の動作を制御して、電動モータ9を駆動させたり停止させたりする。
回転数検出装置42は、電動モータ9の回転数(実回転数)を検出するセンサ、エンコーダ、又はパルス発生器などから構成されている。制御装置7は、例えば回転数検出装置42により検出された電動モータ9の回転数(実回転数)に基づいて、インバータ38により電動モータ9の駆動を制御する。より詳しくは、制御装置7は、回転数検出装置42により検出された電動モータ9の実回転数が、目標回転数(アクセルダイヤル5dによる指示値又は後述する所定の回転数R1~R3)に一致するように、インバータ38により電動モータ9の駆動を制御する。
DC-DCコンバータ40は、バッテリユニット30からジャンクションボックス39を経由して入力された直流電流の電圧を、異なる電圧に変換する電圧変換装置である。本実施形態では、DC-DCコンバータ40は、バッテリユニット30の高電圧を、電動作業機1に備わる電装品に応じた所定の低電圧に変換する降圧コンバータである。DC-DCコンバータ40は、電圧変換後に低圧バッテリ33へ電力を供給する。電動作業機1に備わる電装品には、図1に示す各部以外に、照明及びヒータなどが含まれている。
充電口41は、充電ケーブル(図示省略)が嵌合されるコネクタ(図示省略)と、接続検出装置41aとを有している。充電口41には、充電ケーブルを経由して外部電源(商用電源等)に接続される。接続検出装置41aは、充電口41に充電ケーブルが嵌合されて、外部電源が接続されたことを検出するセンサ等から成る。
ジャンクションボックス39は、外部電源から充電ケーブルを経由して充電口41より入力された電力を、バッテリユニット30に出力する。バッテリユニット30は、充電口41からジャンクションボックス39を経由して入力された電力で充電される。
バッテリユニット30は、複数のバッテリパック31、32を有している。各バッテリパック31、32は、少なくとも1つのバッテリから構成されたリチウムイオン電池等の二次電池(蓄電池)である。各バッテリパック31、32を複数のバッテリから構成した場合、当該複数のバッテリは電気的に直列及び/又は並列に接続される。また、各バッテリパック31、32を構成するバッテリは、内部に複数のセルを有しており、当該複数のセルが電気的に直列及び/又は並列に接続されて構成されている。各バッテリパック31、32は、電動作業機1の各部を所定時間稼働可能な電気容量を有している。バッテリパック31、32同士は、並列に接続されている。
本実施形態では、バッテリユニット30に2つのバッテリパック31、32を設けているが、バッテリユニット30が有するバッテリパックの数は2つに限定されず、1つでもよいし、又は3つ以上でもよい。
各バッテリパック31、32には、接続切替部31a、32aが設けられている。各接続切替部31a、32aは、例えばリレー又はスイッチ等から構成されていて、接続状態と遮断状態とに切替可能である。
制御装置7は、接続切替部31a、32aのうち、一方の接続切替部を接続状態に切り替えて、他方の接続切替部を遮断状態に切り替えることにより、複数のバッテリパック31、32のうち、一方のバッテリパックからジャンクションボックス39に電力を出力し、他方のバッテリパックからの電力の出力を停止する。つまり、制御装置7は、各バッテリパック31、32の電力の出力と出力停止とを制御する。
また、制御装置7は、ジャンクションボックス39の内部の接続状態を切り替えて、各バッテリパック31、32に対してインバータ38、DC-DCコンバータ40、又は充電口41を接続したり切断したりする。ジャンクションボックス39と接続切替部31a、32aとは、各バッテリパック31、32に対するインバータ38、DC-DCコンバータ40、及び充電口41の接続と切断とを切り替える接続切替装置である。
また、各バッテリパック31、32には、BMU(battery management unit;バッテリ監視装置)31b、32bが設けられている。図1では、BMU31b、32bは対応するバッテリパック31、32内に設けられているが、BMU31b、32bは対応するバッテリパック31、32に内蔵されていてもよいし、又はバッテリパック31、32の外側に設置されていてもよい。
BMU31bは、対応するバッテリパック31を監視及び制御する。BMU32bは、対応するバッテリパック32を監視及び制御する。具体的には、BMU31b、32bは、バッテリパック31、32の内部に備わるリレーの開閉を制御して、バッテリパック31、32からの電力供給の開始及び停止を制御する。また、BMU31b、32bは、バッテリパック31、32の温度、電圧、電流、又は内部のセルの端子電圧等を検出する。
さらに、BMU31b、32bは、例えばバッテリパック31、32の内部のセルの端子電圧に基づいて、電圧測定方式によりバッテリパック31、32の残容量(残電力量)を検出する。なお、バッテリパック31、32の残容量の検出方法は、電圧測定方式に限定されず、クーロン・カウンタ方式、電池セル・モデリング方式、インピーダンス・トラック方式などのような他の方式であってもよい。また、バッテリパック31、32の残容量を検出する容量検出部を、BMU31b、32bとは別に設けてもよい。
低圧バッテリ33は、バッテリユニット30より低電圧の蓄電池である。低圧バッテリ33は、DC-DCコンバータ40から供給される電力により充電される。低圧バッテリ33は、電動作業機1に備わる電装品に電力を供給する。
ラジエータ35は、電動モータ9、インバータ38、DC-DCコンバータ40、及びバッテリユニット30等の高発熱型の電気機器を冷却するための冷却水を冷却する。高発熱型の電気機器とは、電力で動作することにより、電動作業機1に備わる他の電気機器より高い熱を発する電気機器のことである。冷却水は、単なる水ではなく、例えば寒冷地でも凍らないような液体から構成されている。
ラジエータ35は、ファンモータ35aと、当該ファンモータ35aの動力により回転駆動するラジエータファン及び熱交換部(図示省略)を有している。ファンモータ35aは、低圧バッテリ33の電力で駆動する。
冷却用ポンプ36は、ラジエータ35及び上記の高発熱型の電気機器と共に、機体2内に配設された冷却水路(図示省略)に設けられている。冷却用ポンプ36は、その冷却水路に対して冷却水を吐出及び循環させる。
オイルクーラ37は、前述した油圧アクチュエータML、MR、MT、C1~C5や、後述する油圧ポンプP1、P2及びコントロールバルブCV(図2等に図示)といった油圧機器を通過した作動油を冷却する。オイルクーラ37は、ファンモータ37aと、当該ファンモータ37aの動力により回転駆動するオイルクーラファン及び熱交換部(図示省略)を有している。ファンモータ37aは、低圧バッテリ33の電力で駆動する。オイルクーラ37は、本発明の「冷却装置」の一例である。
表示装置43は、液晶ディスプレイ又はタッチパネルなどから構成されていて、各種の情報を表示する。油温検出装置44は、作動油の温度を検出するセンサから構成されている。以下、作動油の温度を「作動油温」と言う。
AI(オートアイドリング)-SW(スイッチ)45は、作動油の油圧により作動する圧力センサから構成されている。AI-SW45は、作業装置20、10の少なくともいずれかが作動しているときにオン状態になり、作業装置20、10がいずれも作動していないときにオフ状態になる。即ち、AI-SW45は、作業装置20、10の作動の有無を検出する。AI-SW45は、本発明の「作業検出装置」の一例である。
次に、電動作業機1に備わる油圧回路について説明する。図2は、電動作業機1に備わる油圧回路Kを示した図である。油圧回路Kには、油圧アクチュエータC1~C5、ML、MR、MT、コントロールバルブCV、油圧ポンプP1、P2、作動油タンク48、オイルクーラ37、操作弁PV1~PV6、アンロード弁58、及び油路50などの油圧機器が設けられている。
複数設けられた油圧ポンプP1、P2のうち、一方は作動用油圧ポンプP1であり、他方はコントロール用油圧ポンプP2である。これらの油圧ポンプP1、P2は、電動モータ9の動力により駆動する。
作動用油圧ポンプP1は、作動油タンク48に貯留された作動油を吸引した後、コントロールバルブCVに向かって作動油を吐出する。図2では、便宜上、作動用油圧ポンプP1を1つ図示しているが、これに限らず、各油圧アクチュエータC1~C5、ML、MR、MTへ作動油を供給可能に、作動用油圧ポンプP1を適宜数設ければよい。
コントロール用油圧ポンプP2は、作動油タンク48に貯留された作動油を吸引した後吐出することにより、信号用又は制御用等の油圧を出力する。即ち、コントロール用油圧ポンプP2はパイロット油を供給(吐出)する。コントロール用油圧ポンプP2も適宜数設ければよい。
コントロールバルブCVは、複数の制御弁V1~V8を有している。各制御弁V1~V8は、油圧ポンプP1、P2から各油圧アクチュエータC1~C5、ML、MR、MTに出力する作動油の流量の制御(調整)を調整する。
具体的には、スイング制御弁V1は、スイングシリンダC1に供給する作動油の流量を制御する。ブーム制御弁V2は、ブームシリンダC2に供給する作動油の流量を制御する。アーム制御弁V3は、アームシリンダC3に供給する作動油の流量を制御する。バケット制御弁V4は、バケットシリンダC4に供給する作動油の流量を制御する。ドーザ制御弁V5は、ドーザシリンダC5に供給する作動油の流量を制御する。左用走行制御弁V6は、左側の走行モータMLに供給する作動油の流量を制御する。右用走行制御弁V7は、右側の走行モータMRに供給する作動油の流量を制御する。旋回制御弁V8は、旋回モータMTに供給する作動油の流量を制御する。
操作弁(リモコン弁)PV1~PV6は、操作装置5に備わる操作レバー5a、5b(図1)の操作に応じて作動する。各操作弁PV1~PV6の作動量(操作量)に比例して、パイロット油が各制御弁V1~V8に作用することで、各制御弁V1~V8のスプールが直進移動する。そして、各制御弁V1~V8のスプールの移動量に比例する流量の作動油が、制御対象の油圧アクチュエータC1~C5、ML、MR、MTに供給される。さらに、各油圧アクチュエータC1~C5、ML、MR、MTが、各制御弁V1~V8からの作動油の供給量に応じて駆動する。
言い換えれば、操作レバー5a、5bが操作されることで、制御弁V1~V8に作用する作動油(パイロット油)が調整されて、制御弁V1~V8が制御される。そして、制御弁V1~V8から油圧アクチュエータC1~C5、ML、MR、MTに供給される作動油の流量が調整されて、油圧アクチュエータC1~C5、ML、MR、MTの駆動と停止とが制御される。
油路50は、例えばホース又は金属等の材料で形成された管から構成されている。油路50は、油圧回路Kに設けられた各部を接続し、各部に対して作動油又はパイロット油を流す流路である。油路50には、第1油路51、第2油路52、第1吸引油路54、第2吸引油路55、及び制限油路57が含まれている。
第1吸引油路54は、作動用油圧ポンプP1が作動油タンク48から吸引した作動油を流す流路である。第2吸引油路55は、コントロール用油圧ポンプP2が作動油タンク48から吸引した作動油を流す流路である。第1油路51は、作動用油圧ポンプP1が吐出した作動油をコントロールバルブCVの制御弁V1~V8に向かって流す流路である。第1油路51は、コントロールバルブCV内で複数に分岐して、各制御弁V1~V8に接続されている。第2油路52は、制御弁V1~V8を通過した作動油を作動油タンク48に向かって流す流路である。作動油タンク48は作動油を貯留する。第2油路52には、往復油路52aと排出油路52bとが含まれている。
往復油路52aは、各制御弁V1~V8と制御対象の油圧アクチュエータC1~C5、ML、MR、MTとを2本1対で接続するように複数設けられている。往復油路52aは、接続された制御弁V1~V8から油圧アクチュエータC1~C5、ML、MR、MTに作動油を供給したり、油圧アクチュエータC1~C5、ML、MR、MTから制御弁V1~V8に作動油を戻したりする流路である。排出油路52bの一端側は複数に分岐して、各制御弁V1~V8に接続されている。排出油路52bの他端部は、作動油タンク48に接続されている。
第1油路51を通っていずれかの制御弁V1~V8に流れた作動油の一部は、当該制御弁V1~V8を通過して往復油路52aの一方を通り、制御対象の油圧アクチュエータC1~C5、ML、MR、MTに供給される。そして、その油圧アクチュエータC1~C5、ML、MR、MTから排出された作動油は、往復油路52aの他方を通って接続された制御弁V1~V8に戻り、当該制御弁V1~V8を通過して、排出油路52b流れる。
また、第1油路51を通っていずれかの制御弁V1~V8に流れた作動油の他部は、油圧アクチュエータC1~C5、ML、MR、MTへ供給されることなく、当該制御弁V1~V8を通過して排出油路52bに流れる。排出油路52bには、オイルクーラ37が設けられている。オイルクーラ37は、いずれかの制御弁V1~V8から排出油路52bを通って流れて来た作動油を冷却する。
オイルクーラ37で冷却された作動油は、排出油路52bを通って作動油タンク48に戻る。上述したように、油路54、51、52は、作動油を作動油タンク48と油圧ポンプP1とコントロールバルブCVの制御弁V1~V8と(一部の作動油は油圧アクチュエータC1~C5、ML、MR、MTも)に対して循環させるように配設されている。
制限油路57は、コントロール用油圧ポンプP2が吐出した作動油を操作弁PV1~PV6に流す流路である。制限油路57の一端部は、コントロール用油圧ポンプP2に接続され、他端側は複数に分岐して、各操作弁PV1~PV6の一次側のポート(一次ポート)に接続されている。
制限油路57には、2位置切換弁から成るアンロード弁58が設けられている。アンロード弁58は、アンロードレバー5c(図1)の操作に連動して、第1位置58aと第2位置58bのいずれかに切り替わる。アンロード弁58が第1位置58aに切り換わることで、作動用油圧ポンプP1から油圧アクチュエータC1~C5、ML、MR、MTへ作動油が供給され、油圧アクチュエータC1~C5、ML、MR、MT、作業装置20、及び走行装置10の作動が許可される。また、アンロード弁58が第2位置58bに切り換わることで、作動用油圧ポンプP1から油圧アクチュエータC1~C5、ML、MR、MTへの作動油の供給が遮断され、油圧アクチュエータC1~C5、ML、MR、MT、作業装置20、及び走行装置10の作動が許可されなくなる(作動禁止状態)。
詳しくは、アンロードレバー5cがロード位置(第1位置)に操作されることで、アンロード弁58が制御装置7により第1位置(油供給位置、ロード位置)58aに切り換えられ、コントロール用油圧ポンプP2から制限油路57に吐出された作動油が操作弁PV1~PV6に供給されて、制御弁V1~V8が操作可能になる。これにより、油圧アクチュエータC1~C5、ML、MR、MT、作業装置20、及び走行装置10も操作可能になり、これら各部C1~C5、ML、MR、MT、20、10の作動が許可される。操作弁PV1~PV6から排出された作動油は、別の排出油路(図示省略)を通って作動油タンク48に戻る。
また、アンロードレバー5cがアンロード位置(第2位置)に操作されることで、アンロード弁58が制御装置7により第2位置(油遮断位置、アンロード位置)58bに切り換えられ、コントロール用油圧ポンプP2から制限油路57に吐出された作動油が操作弁PV1~PV6に供給されなくなり、制御弁V1~V8が操作不可能になる(操作禁止状態)。これにより、油圧アクチュエータC1~C5、ML、MR、MT、作業装置20、及び走行装置10も操作不可能になり、これら各部C1~C5、ML、MR、MT、20、10の作動が許可されなくなる。アンロードレバー5cだけでなくアンロード弁58も、本発明の「切換部材」に含まれる構成の一例である。
油圧回路Kには、上記以外にも、制御弁V1~V8の操作状態を検知するための操作検知油路(図示省略)が設けられている。操作検知油路は、コントロール用油圧ポンプP2から吐出されたパイロット油を、制御弁V1~V8の位置をそれぞれ切り換えるための複数の切換弁を順次経由させて、作動油タンク48に戻す油路である。操作検知油路において、最もコントロール用油圧ポンプP2側に配置された制御弁V1の上流側には、AI-SW45(図1)が接続されている。
制御弁V1~V8のいずれかが中立位置から切換位置に操作されることで、上記操作検知油路の一部が遮断されて、当該操作検知油路内のパイロット油の圧力がある程度高くなり(いわゆる圧が立った状態)、AI-SW45がオン状態になる。即ち、少なくともいずれかの作業装置20、10の作動が有ることが、AI-SW45により検出される。また、制御弁V1~V8がいずれも中立位置にあるときは、上記操作検知油路が開通するため、当該操作検知油路内のパイロット油の圧力がある程度まで高くならず(いわゆる圧が立っていない状態)、AI-SW45がオフ状態になる。即ち、作業装置20、10の作動が無いことが、AI-SW45により検出される。
次に、電動作業機1の動作を説明する。図3は、電動モータ9の回転数の制御マップの一例を示す図である。詳しくは、図3の制御マップは、電動モータ9の回転数の制御値と作動油温との相関関係をグラフで示している。図3の制御マップの横軸は、作動油温[℃]を示し、縦軸は、電動モータ9の回転数[rpm]を示している。図3の制御マップを表すデータは、制御装置7の記憶部7b(図1)に予め記憶されている。
制御装置7は、油温検出装置44により検出された作動油温Tが、図3に示す5つの所定の温度範囲I~Vのいずれかにあるかを判別する。第3温度範囲IIIは、許容温度範囲であり、所定の温度T2(例えば30℃)以上で且つ所定の温度T3(例えば87℃)以下である。当該温度T2、T3及び許容温度範囲T2~T3は、例えば電動作業機1の各部を安定に動作させることが可能な作動油温及び温度範囲に設定されている。
許容温度範囲IIIより低い温度範囲I、IIのうち、第1温度範囲Iは、所定の温度T1(例えば2℃)未満に設定されている。第2温度範囲IIは、温度T1以上で且つ温度T2未満に設定されている。許容温度範囲IIIより高い温度範囲IV、Vのうち、第4温度範囲IVは、温度T3より高くて所定の温度T4(例えば103℃)以下に設定されている。温度T1は、本発明の「第1温度」の一例であり、温度T4は、本発明の「第2温度」の一例である。第4温度範囲IVは、温度T4(例えば103℃)より高く設定されている。
制御装置7は、電動モータ9の駆動中に、作動油温T、アンロードレバー5c、及びAI-SW45の状態に応じて、電動モータ9の回転数Rを所定の範囲R1~R5内で制御する。第1回転数R1は、電動モータ9の停止状態に相当する回転数(例えば0rpm)である。
第2回転数R2は、AI-SW45が作業装置20、10の作動の有無を検出可能な作動油の油圧を生じさせることができる電動モータ9の回転数(例えば250rpm)である。より詳しくは、作業装置20、10の少なくともいずれかが作動したときに、AI-SW45がオン状態に切り換わり、作業装置20、10が作動していないときに、AI-SW45がオフ状態に切り換わることが可能な、作動油の最小油圧以上の油圧を生じさせるための電動モータ9の回転数に、第2回転数R2は設定されている。
第3回転数R3は、作業装置20、10により作業を行うための電動モータ9の回転数の下限値(例えば1,000rpm)である。より詳しくは、操作レバー5a、5bの操作に応じて作業装置20、10を即座に作動させることが可能な電動モータ9の無負荷状態の回転数に、第3回転数R3は設定されている。第3回転数R3は、第1回転数R1及び第2回転数R2より大きい回転数であり、アイドリング回転数でもある。第2回転数R2は、第1回転数R1より大きくて第3回転数R3より小さい回転数である。また、第2回転数R2は、作業装置20、10による作業を行うときの電動モータ9の回転数よりも低いアイドリング回転数でもある。
第5回転数R5は、電動モータ9に対して設定可能な所定の最大回転数(例えば2,200rpm)である。第4回転数R4は、第5回転数R5より小さく制限された回転数であって、第3回転数R3より大きい回転数である。
なお、上述した温度T1~T4及び回転数R1~R5の数値は一例であって、上記に限定するわけではない。また、電動モータ9の停止状態に対応する第1回転数R1は、0rpmに限定せず、例えば1rpm未満などの極微小な回転数であってもよい。また、本例では、制御装置7が、電動モータ9の回転数を0rpm(第1回転数)に設定する際に、インバータ38から電動モータ9への電力供給を継続する。然るに、例えば制御装置7が、インバータ38から電動モータ9への電力供給を遮断して、電動モータ9を完全に停止させることにより、電動モータ9の回転数を0rpmに設定してもよい。
図4A~図4Cは、電動作業機1における電動モータ9の回転数の制御動作を示すフローチャートである。図4A~図4C示す一連の制御動作は、制御装置7のCPU7a(図1)が、記憶部7bに予め記憶されたソフトウェアプログラムと図3の制御マップに基づいて実行する。以下、便宜上、電動モータ9の回転数を「モータ回転数」と言う。
オペレータによりスタータSW8がオン操作されると、制御装置7は、インバータ38により電動モータ9を始動する。電動モータ9の駆動中に、制御装置7は、油温検出装置44により作動油温Tを検出する(図4AのS1)。
作動油温Tが所定の許容温度範囲III内(温度T2以上で且つ温度T3以下)にある場合(図4AのS2:YES)、制御装置7は、モード選択SW5e(図1)によるモードの選択状態を確認する。このとき、通常モードがモード選択SW5eにより選択されているときは(図4AのS3:NO)、制御装置7が、アクセルダイヤル5d(図1)によるモータ回転数Rの指示範囲Rrangeを、第3回転数R3以上で且つ第5回転数R5以下に設定する(図4AのS5、図3の許容温度範囲IIIのS丸印)。即ち、制御装置7は、アクセルダイヤル5dによるモータ回転数Rの指示範囲Rrangeの下限値に第3回転数R3を設定し、上限値に第5回転数R5を設定する。
対して、ECOモードがモード選択SW5eにより選択されているときは(図4AのS3:YES)、制御装置7が、アクセルダイヤル5dによるモータ回転数Rの指示範囲Rrangeを、第3回転数R3以上で且つ第4回転数R4以下に設定する(図4AのS4、図3の許容温度範囲IIIのE丸印)。即ち、制御装置7は、アクセルダイヤル5dによるモータ回転数Rの指示範囲Rrangeの下限値に第3回転数R3を設定し、上限値に第4回転数R4を設定する。
また、作業装置20、10が所定時間(例えば4秒)以上作動しなかったため、AI-SW45が所定時間(例えば4秒)以上オフ状態になると(図4AのS6:YES)、制御装置7は、モータ回転数Rを第2回転数R2に一致するように制御する(図4AのS7、図3の許容温度範囲IIIの黒丸印)。この図4Aの処理S6、S7は、いわゆるAI(オートアイドリング)制御である。
また、アンロードレバー5c(図1)及びアンロード弁58(図2)がアンロード位置に切り換わると(図4AのS8:YES)、制御装置7は、モータ回転数Rを第1回転数R1に一致するように制御する(図4AのS9、図3の許容温度範囲IIIの黒四角印)。これにより、電動モータ9が回転停止状態になる。この図4Aの処理S8、S9は、いわゆるAS(オートストップ)制御である。
また、アンロードレバー5c及びアンロード弁58がロード位置に有る状態で、アクセルダイヤル5dが操作されると(図4AのS10:YES)、制御装置7は、アクセルダイヤル5dの操作位置に応じてモータ回転数Rの指示値を演算し、当該指示値に一致するようにモータ回転数Rを変更する(図4AのS11)。
このとき、作動油温Tが許容温度範囲IIIにあるため、モード選択SW5eにより通常モードが選択されているときは、図4Aの処理S5で設定された指示範囲Rrange内(R3~R5)で、制御装置7が、アクセルダイヤル5dの操作位置に応じてモータ回転数Rの指示値を演算する。また、モード選択SW5eによりECOモードが選択されているときは、図4Aの処理S4で設定された指示範囲Rrange内(R3~R4)で、制御装置7が、アクセルダイヤル5dの操作位置に応じてモータ回転数Rの指示値を演算する。
その後、オペレータによりスタータSW8がオフ操作されると、制御装置7は、電動モータ9の停止指示が有ったと判断して(図4AのS12:YES)、インバータ38により電動モータ9への電力供給を停止することにより、電動モータ9の駆動を停止する(図4AのS13)。これにより、電動作業機1が停止状態となる。
一方、オペレータによりスタータSW8がオフ操作されなければ、制御装置7は、電動モータ9の停止指示が無いと判断して(図4AのS12:NO)、再度処理S1から以降の処理を実行する。この場合、電動モータ9は駆動中である。
また、作動油温Tが許容温度範囲III(T2~T3)外にあり(図4AのS2:NO)且つ作動油温Tが許容温度範囲IIIより低い(図4AのS14:YES)場合、制御装置7は、さらに作動油温Tが温度範囲I、IIのいずれかにあるかを判別する。
例えば、作動油温Tが温度T1以上で且つ温度T2未満の低温度範囲II内にある場合(図4BのS15:YES)、制御装置7は、モード選択SW5eによるモードの選択状態を確認する。このとき、通常モードがモード選択SW5eにより選択されているときは(図4BのS16:NO)、制御装置7が、アクセルダイヤル5dによるモータ回転数Rの指示範囲Rrangeを、第3回転数R3以上で且つ第5回転数R5以下に設定する(図4BのS18、図3の高温度範囲IIのS丸印)。
対して、ECOモードがモード選択SW5eにより選択されているときは(図4BのS16:YES)、制御装置7が、アクセルダイヤル5dによるモータ回転数Rの指示範囲Rrangeを、第3回転数R3以上で且つ第4回転数R4以下に設定する(図4BのS17、図3の高温度範囲IIのE丸印)。
また、AI-SW45が所定時間以上オフ状態になると(図4BのS19:YES)、制御装置7は、モータ回転数Rを第3回転数R3に一致するように制御する(図4BのS20、図3の高温度範囲IIの黒丸印)。この図4Bの処理S19、S20もAI制御である。
また、アンロードレバー5c及びアンロード弁58がアンロード位置に切り換わっても(図4BのS21:YES)、制御装置7は、モータ回転数Rを第3回転数R3に一致するように制御する(図4BのS22)。即ち、作動油温Tが許容温度範囲IIIより低い温度範囲IIに有るときは、オペレータによりアンロードレバー5cがアンロード位置に切り換えられて、作業装置20、10を作動させない意図が示されても、制御装置7は、AS(オートストップ)制御を実行せず、電動モータ9を第3回転数R3以上で回転駆動させ続けて、作動油を循環させることにより暖機を行う。図4Bの処理S19~S22は、いわゆる暖機制御である。
また、アンロードレバー5cなどがロード位置に有る状態で、アクセルダイヤル5dが操作されると(図4AのS10:YES)、制御装置7は、アクセルダイヤル5dの操作位置に応じてモータ回転数Rの指示値を演算し、当該指示値に一致するようにモータ回転数Rを変更する(図4AのS11)。
このとき、作動油温Tが低温度範囲IIにあるため、モード選択SW5eにより通常モードが選択されているときは、図4Bの処理S18で設定された指示範囲Rrange内(R3~R5)で、制御装置7が、アクセルダイヤル5dの操作位置に応じてモータ回転数Rの指示値を演算する。また、モード選択SW5eによりECOモードが選択されているときは、図4Bの処理S17で設定された指示範囲Rrange内(R3~R4)で、制御装置7が、アクセルダイヤル5dの操作位置に応じてモータ回転数Rの指示値を演算する。
また、作動油温Tが温度T1未満の極低温度範囲I内にある場合(図4BのS15:NO、T<T1)、制御装置7は、モード選択SW5eにより通常モードとECOモードのいずれが選択されていても、アクセルダイヤル5dによるモータ回転数Rの指示範囲Rrangeを、第3回転数R3以上で且つ第4回転数R4以下に設定する(図4BのS17、図3の極低温度範囲IのS丸印とE丸印)。
また、AI-SW45が所定時間以上オフ状態になったり(図4BのS19:YES)、アンロードレバー5cなどがアンロード位置に切り換わったり(図4BのS21:YES)しても、制御装置7は、モータ回転数Rを第3回転数R3に一致するように制御する(図4BのS20、S22、図3の極低温度範囲Iの黒丸印)。即ち、作動油温Tが許容温度範囲III及び低温度範囲IIより低い極低温度範囲Iに有るときは、アンロードレバー5cがアンロード位置に切り換えられて、作業装置20、10を作動させない意図が示されても、制御装置7は、AS(オートストップ)制御を実行せず、電動モータ9を第3回転数R3以上で回転駆動させ続けて、作動油を循環させることにより、暖機を行う。
また、アンロードレバー5cなどがロード位置に有る状態で、アクセルダイヤル5dが操作されると(図4AのS10:YES)、制御装置7は、アクセルダイヤル5dの操作位置に応じてモータ回転数Rの指示値を演算し、当該指示値に一致するようにモータ回転数Rを変更する(図4AのS11)。このとき、作動油温Tが極低温度範囲Iにあるため、モード選択SW5eにより通常モードとECOモードのいずれが選択されていても、図4Bの処理S17で設定された指示範囲Rrange内(R3~R4)で、制御装置7が、アクセルダイヤル5dの操作位置に応じてモータ回転数Rの指示値を演算する。
また、作動油温Tが許容温度範囲III(T2~T3)外にあり(図4AのS2:NO)且つ作動油温Tが許容温度範囲IIIより高い(図4AのS14:NO)場合、制御装置7は、さらに作動油温Tが温度範囲IV、Vのいずれかにあるかを判別する。
例えば、作動油温Tが温度T3より高くて温度T4以下の高温度範囲IV内にある場合(図4CのS23:YES)、制御装置7は、モード選択SW5eによるモードの選択状態を確認する。このとき、通常モードがモード選択SW5eにより選択されているときは(図4CのS24:NO)、制御装置7が、アクセルダイヤル5dによるモータ回転数Rの指示範囲Rrangeを、第3回転数R3以上で且つ第5回転数R5以下に設定する(図4CのS26、図3の高温度範囲IVのS丸印)。
対して、ECOモードがモード選択SW5eにより選択されているときは(図4CのS24:YES)、制御装置7は、アクセルダイヤル5dによるモータ回転数Rの指示範囲Rrangeを、第3回転数R3以上で且つ第4回転数R4以下に設定する(図4CのS25、図3の高温度範囲IVのE丸印)。
また、AI-SW45が所定時間以上オフ状態になると(図4CのS27:YES)、制御装置7は、モータ回転数Rを第2回転数R2に一致するように制御する(図4CのS28、図3の高温度範囲IVの黒丸印)。この図4Cの処理S27、S28もAI制御である。
また、アンロードレバー5c及びアンロード弁58がアンロード位置に切り換わっても(図4CのS29:YES)、制御装置7は、モータ回転数Rを第2回転数R2に一致するように制御する(図4CのS30、図3の高温度範囲IVの黒丸印)。即ち、作動油温Tが許容温度範囲IIIより高い高温度範囲IVに有るときは、アンロードレバー5cがアンロード位置に切り換えられて、作業装置20、10を作動させない意図が示されても、制御装置7は、AS(オートストップ)制御を実行せず、電動モータ9を第3回転数R3より小さい第2回転数R2で回転駆動させ続けて、作動油を循環させることにより、作動油の冷却を行う。図4Cの処理S27~S30は、いわゆる冷却制御である。
また、アンロードレバー5cなどがロード位置に有る状態で、アクセルダイヤル5dが操作されると(図4AのS10:YES)、制御装置7は、アクセルダイヤル5dの操作位置に応じてモータ回転数Rの指示値を演算し、当該指示値に一致するようにモータ回転数Rを変更する(図4AのS11)。
このとき、作動油温Tが高温度範囲IVにあるため、モード選択SW5eにより通常モードが選択されているときは、図4Cの処理S26で設定された指示範囲Rrange内(R3~R5)で、制御装置7が、アクセルダイヤル5dの操作位置に応じてモータ回転数Rの指示値を演算する。また、モード選択SW5eによりECOモードが選択されているときは、図4Cの処理S25で設定された指示範囲Rrange内(R3~R4)で、制御装置7が、アクセルダイヤル5dの操作位置に応じてモータ回転数Rの指示値を演算する。
また、作動油温Tが温度T4より高い極高温度範囲V内にある場合(図4CのS23:NO、T>T4)、制御装置7は、モード選択SW5eにより通常モードとECOモードのいずれが選択されていても、アクセルダイヤル5dによるモータ回転数Rの指示範囲Rrangeの上限値と下限値を、第3回転数R3に設定する(図4CのS31、図3の極高温度範囲VのS丸印とE丸印)。即ち、作動油温Tが極高温度範囲V内にあるときには、アクセルダイヤル5dによるモータ回転数Rの指示範囲Rrangeが、一定の第3回転数R3に設定される。このため、アクセルダイヤル5dを中立位置からいずれの位置へ操作しても、モータ回転数Rの指示値が第3回転数R3になり、電動モータ9の回転数Rが第3回転数R3に制限される。
また、AI-SW45が所定時間以上オフ状態になったり(図4CのS27:YES)、アンロードレバー5cなどがアンロード位置に切り換わったり(図4CのS29:YES)しても、制御装置7は、モータ回転数Rを第2回転数R2に一致するように制御する(図4CのS30、図3の極高温度範囲Vの黒丸印)。即ち、作動油温Tが極高温度範囲Vに有るときは、アンロードレバー5cがアンロード位置に切り換えられて、作業装置20、10を作動させない意図が示されても、制御装置7は、AS制御を実行せず、電動モータ9を第2回転数R2で回転駆動させ続けて、作動油を循環させることにより、作動油の冷却を行う。
また、アンロードレバー5cなどがロード位置に有る状態で、アクセルダイヤル5dが操作されると(図4AのS10:YES)、制御装置7は、モータ回転数Rの指示値を演算し、当該指示値に一致するようにモータ回転数Rを変更する(図4AのS11)。このとき作動油温Tが極高温度範囲Vにあるため、モード選択SW5eによるモードの選択状態とアクセルダイヤル5dの操作位置とにかかわらず、制御装置7は、図4Cの処理S31で設定された一定値R3を、モータ回転数Rの指示値として決定する。
作動油温Tが許容温度範囲IIIより高い温度範囲IV、Vにある場合、制御装置7は、モータ回転数Rを第2回転数R2に一致するように制御したときに、オイルクーラ37のファンモータ37aを所定の回転数で回転駆動させて、作動油を冷却してもよい。即ち、作業装置20、10が作動しないときに、電動モータ9を第2回転数R2で回転させつつ、オイルクーラ37を駆動して、作動油を冷却する。
また、作動油温Tが許容温度範囲IIIより低い場合、制御装置7は、モータ回転数Rを第3回転数R3に一致するように制御したときに、オイルクーラ37を停止して、消費電力を低減し、作動油の暖機を促進してもよい。さらに、作動油温Tが許容温度範囲III内にある場合にも、制御装置7は、モータ回転数Rを第1回転数R1又は第2回転数R2に一致するように制御したときに、オイルクーラ37を停止して、消費電力を低減してもよい。
以上の実施形態では、作動油温Tの温度範囲を第1~第5温度範囲I~Vの5つに区分した例を示したが、これに限定するわけではない。例えば、許容温度範囲内と許容温度範囲外の2つに、作動油温Tの温度範囲を区分してもよい。また、許容温度範囲内と、許容温度範囲より低い温度範囲と、許容温度範囲より高い温度範囲の3つに、作動油温Tの温度範囲を区分してもよい。さらに、作動油温Tの温度範囲を4つ或いは6つ以上に区分してもよい。また、各温度範囲でAI制御を行う際のモータ回転数Rとして、第2回転数R2と第3回転数R3の2つだけでなく、3つ以上の所定の回転数を設定してもよい。
以上の実施形態では、電動モータ9の第2~第4回転数R2~R4を一定値にした例を示したが、これに限定するわけではない。例えば制御装置7が、バッテリユニット30に設けられたバッテリパック31、32の残容量に応じて、第2~第4回転数R2~R4を変更してもよい。具体的には、バッテリパック31、32の残容量が少ない程、第2~第4回転数R2~R4の少なくとも1つを小さく変更してもよい。
以上の実施形態では、作業用操作部材として作業用操作レバー5aと走行用操作レバー5bを用い、切換部材及びアンロード用操作部材としてアンロードレバー5cを用い、選択部材としてモード選択SW5eを用い、指示部材としてアクセルダイヤル5dを用いた例を示したが、これらに限定するわけではない。例えば、レバー、ジョイスティック、スライドスイッチ、タンブラスイッチ、押しボタン、ダイヤル、又はキーなどの各種の操作部材を、作業用操作部材、切換部材、アンロード用操作部材、選択部材、及び指示部材として用いてもよい。また、例えばアンロード弁58として、機械的に作動する作動弁或いは電気的に作動する電磁弁を用いてもよい。
以上の実施形態では、作業検出装置として、圧力スイッチから成るAI-SW45を用いた例を示したが、これに限定するわけではない。例えば、作業用操作レバー5a及び走行用操作レバー5bの操作の有無を検出するポテンションメータ、センサ、又はスイッチなどを、作業検出装置として用いてもよい。
本実施形態の電動作業機1は、以下の構成を備え、効果を奏する。
本実施形態の電動作業機1は、機体2と、機体2に搭載されたバッテリユニット30と、バッテリユニット30からの電力により駆動される電動モータ9と、電動モータ9からの動力により作動する油圧機器(油圧モータML、MR、MT、油圧シリンダC1~C5、油圧ポンプP1、P2、コントロールバルブCV)と、油圧機器から供給された作動油の油圧により作動する作業装置20、10(作業装置20、走行装置10)と、電動モータ9の駆動を制御する制御装置7と、作業装置20、10の作動を許可する第1位置と作業装置20、10の作動を許可しない第2位置のいずれかに切り換え可能な切換部材5c、58(アンロードレバー5c、アンロード弁58)と、作動油の温度Tを検出する油温検出装置44と、を備え、制御装置7は、電動モータ9の駆動中に、切換部材5c、58が第2位置に切り換えられ、且つ作動油の温度Tが低温状態でも高温状態でもない所定の許容温度範囲III(所定の温度T2~T3)内にある場合、電動モータ9の回転数Rを電動モータ9の停止状態に相当する所定の第1回転数R1に制御する。
上記の構成によれば、オペレータが電動作業機1を操作しないため、切換部材5c、58を作業装置20、10の作動を許可しない第2位置に切り換えたときに、作動油の温度Tが許容温度範囲III内にあれば、電動モータ9の回転数Rが停止状態に相当する第1回転数R1に低下する。このため、バッテリユニット30の電力が電動モータ9で無駄に消費されるのを抑制することができ、電動作業機1において無駄な消費電力を低減し、作業効率を向上させることが可能となる。また、作動油の温度Tが許容温度範囲III外に有る場合、即ち作動油の温度Tが低温状態と高温状態のいずれかに有る場合に、電動モータ9の回転数Rを第1回転数R1に制御しないことで、電動モータ9が完全に停止状態にならずに回転し続けるので、油圧ポンプP1、P2などの油圧機器により作動油を循環させて、作動油を暖機したり冷却したりすることができ、作業効率を向上させることが可能となる。
本実施形態では、電動モータ9の駆動中に、切換部材5c、58が第2位置に切り換えられ、且つ作動油の温度Tが許容温度範囲III内に無い場合、電動モータ9の回転数Rを第1回転数R1より大きく、且つ作業装置20、10により作業を行うときの回転数の下限値以下である所定のアイドリング回転数R2、R3に制御する。
上記により、切換部材5c、58が第2位置に切り換えられたときに、作動油の温度Tが許容温度範囲III内に有るか否かに応じて、電動モータ9の回転数Rが第1回転数R1或いはアイドリング回転数R2、R3に低下するので、無駄な消費電力を低減することができる。また、無駄な消費電力を低減した分、作業装置20、10の稼働時間を延ばして、作業効率を向上させることができる。
また、本実施形態では、制御装置7は、電動モータ9の駆動中に、切換部材5c、58が第2位置に切り換えられた場合、作動油の温度Tが許容温度範囲IIIより低ければ、電動モータ9の回転数Rを作業装置20、10がアイドリング状態になるための所定の第3回転数R3に一致するように制御し、作動油の温度Tが許容温度範囲IIIより高ければ、電動モータ9の回転数Rを第1回転数R1より大きくて第3回転数R3より小さい所定の第2回転数R2に一致するように制御する。
上記により、切換部材5c、58が第2位置に切り換えられ、且つ作動油の温度Tが許容温度範囲IIIより低い場合に、電動モータ9の回転数Rが第3回転数R3に低下するので、無駄な消費電力を低減し、且つ油圧ポンプP1、P2などの油圧機器を作動させて、作動油を循環させることにより暖機することができ、暖機にかかる時間を短縮することもできる。また、切換部材5c、58が第2位置に切り換えられ、且つ作動油の温度Tが許容温度範囲IIIより高い場合に、電動モータ9の回転数Rが第3回転数R3より小さい第2回転数R2に低下するので、無駄な消費電力を低減し、且つ作動油を循環させることにより冷却することができる。さらに、上記のように、切換部材5c、58が第2位置に切り換えられたときに、作動油の温度Tに応じて電動モータ9の回転数Rを第1~第3回転数R1~R3に制御することで、作動油の暖機と冷却のバランスを保ちながら、無駄な消費電力を低減することが可能になる。
また、本実施形態では、電動作業機1は、作動油の油圧により作動して、作業装置20、10の作動の有無を検出する作業検出装置(AI-SW)45を備え、第2回転数R2は、作業検出装置45が作業装置の作動の有無を検出可能な作動油の油圧を生じさせることができる電動モータ9の回転数Rに設定されている。これにより、電動モータ9の回転数Rを第2回転数R2に低下させても、作業検出装置45によって作業装置20、10の作動の有無を検出することができる。
また、本実施形態では、制御装置7は、電動モータ9の駆動中に、切換部材5c、58が第1位置に有り、且つ作業装置20、10が所定時間以上作動しなかった場合、作動油の温度Tが許容温度範囲IIIより低ければ、電動モータ9の回転数Rを第3回転数R3に一致するように制御し、作動油の温度Tが許容温度範囲III以上であれば、電動モータ9の回転数Rを第2回転数R2に一致するように制御する。これにより、作業装置20、10が所定時間以上作動しなかった場合に、許容温度範囲IIIに対する作動油の温度Tの高低に応じて、電動モータ9の回転数Rを第3回転数R3或いは第2回転数R2に低下させて、無駄な消費電力を低減し、且つ作動油を循環させることにより暖機或いは冷却を行うことができる。
また、本実施形態では、電動作業機1は、電動モータ9の回転数Rを指示するために操作される指示部材(アクセルダイヤル)5dを備え、制御装置7は、指示部材5dの操作により指示可能な電動モータ9の回転数Rを作動油の温度Tに応じて設定する。また、制御装置7は、電動モータ9の駆動中に、指示部材5dの操作状態に応じて、電動モータ9の回転数Rの指示値を演算して、当該指示値に一致するように、電動モータ9の回転数Rを制御する。これにより、指示部材5dの操作状態と作動油の温度Tとに応じて、電動モータ9の回転数Rを制御して、作動油を適切な流速及び圧力で循環させることができ、作業装置20、10を安定に作動させることが可能となる。
また、本実施形態では、制御装置7は、作業装置20、10がアイドリング状態になるための電動モータ9の第3回転数R3から、設定可能な電動モータ9の回転数の上限値である最大回転数(第5回転数)R5までの範囲内で、指示部材5dの操作により指示可能な電動モータ9の回転数Rの指示範囲Rrangeを作動油の温度Tに応じて設定する。これにより、指示部材5dの操作状態と作動油の温度Tとに応じて、電動モータ9の回転数Rを適切な範囲で変更することができる。
また、本実施形態では、電動作業機1は、第1モード(通常モード)と当該第1モードよりも消費電力を低減する第2モード(ECOモード)とのいずれかを選択する選択部材(モード選択SW)5eを備え、制御装置7は、作動油の温度Tが許容温度範囲III内にある場合、第2モードが選択部材5eにより選択されたときの指示部材5dの操作による電動モータ9の回転数Rの指示範囲Rrangeの上限値を、第1モードが選択部材5eにより選択されたときの指示範囲Rrangeの上限値より小さく設定する。これにより、作動油の温度Tが極低温度範囲I及び極高温度範囲Vのいずれにもない場合に、第2モードが選択されたときに、電動モータ9の回転数Rの上限値を、第1モードが選択されたときの回転数Rの上限値より小さく抑えて、消費電力を低減することができる。
また、本実施形態では、制御装置7は、作動油の温度Tが許容温度範囲IIIより低い所定の第1温度T1未満である場合、第1モードと第2モードのいずれが選択部材5eにより選択されても、指示部材5dの操作による電動モータ9の回転数Rの指示範囲Rrangeの上限値を最大回転数R5より小さい値に設定する。最大回転数R5は、例えば、作動油の温度Tが許容温度範囲III内にあり且つ第1モードが選択部材5eにより選択されている場合に、指示部材5dにより指示可能な電動モータ9の回転数の上限値である。上記により、作動油の温度Tが極低温度範囲Vにあって、作動油の動粘度が高いときに、指示部材5dが最大限操作されても、電動モータ9の回転数Rを最大回転数R5より小さく抑えて、作動油が流れる油圧機器又は油路でキャビテーションが発生するのを防ぎ、且つ消費電力を低減することができる。
また、本実施形態では、制御装置7は、作動油の温度Tが許容温度範囲IIIより高い所定の第2温度T4よりも高いときに、第1モードと第2モードのいずれが選択部材5eにより選択されても、指示部材5dにより指示可能な電動モータ9の回転数R(指示範囲Rrangeの上限値及び下限値)を第3回転数R3に設定する。これにより、作動油の温度Tが極高温度範囲Vにあるときに、高温状態の作動油が流れて、油圧機器又は油路が摩耗したり損傷したりするのを防ぐことができる。
また、本実施形態では、電動作業機1は、作動油を冷却する冷却装置(オイルクーラ)37を備え、制御装置7は、油温検出装置44により検出された作動油の温度Tが許容温度範囲IIIより高いときに、冷却装置37を駆動することにより作動油を冷却し、作動油の温度Tが許容温度範囲III以下のときに、冷却装置37を停止する。これにより、作動油の温度Tが高い場合に、切換部材5c、58が第2位置に切り換えられたり、作業装置20、10が所定時間以上作動しなかったりしたときに、電動モータ9を低速な第2回転数R2で回転させて、無駄な消費電力を低減し、且つ冷却装置37を併用して、作動油を許容温度範囲IIIまで冷却するのにかかる時間を短縮することができる。また、作動油の温度Tが低い場合に、冷却装置37を停止して、無駄な消費電力を低減し、且つ電動モータ9を回転させて、作動油を循環させることにより暖機することができる。
さらに、本実施形態では、電動作業機1は、バッテリユニット30から電動モータ9に供給する電力を調整するインバータ38と、電動モータ9の回転数Rを検出する回転数検出装置42と、作業装置20、10の作動を操作する作業用操作部材5a、5b(作業用操作レバー5a、走行用操作レバー5b)と、を備え、切換部材5c、58は、作業装置20、10の作動を許可するロード位置と作業装置20、10の作動を許可しないアンロード位置のいずれかに切り換え操作可能なアンロード用操作部材5cを含み、制御装置7は、回転数検出装置42により検出された電動モータ9の回転数Rに基づいて、インバータ38から電動モータ9に供給する電力を調整することで、電動モータ9の回転数Rを制御する。
上記により、アンロード用操作部材5cをロード位置とアンロード位置のいずれかに切り換え操作することで、作業装置20、10の作動を許可し又は許可しないようにすることができる。また、電動モータ9の回転数Rを指示部材5dによる指示値又は所定の回転数R1~R3に確実に設定することができる。また、作業装置20、10の作動の有無に対応する作業用操作部材5a、5bの操作の有無を、AI-SW45により検出することができる。さらに、インバータ38によりバッテリユニット30から電動モータ9への電力供給を続けた状態で、電動モータ9の回転数Rを第1回転数R1に制御することで、バッテリユニットか30から電動モータ9への電力供給を遮断する場合よりも、その後電動モータ9の回転数Rを上昇させる際に消費電力を低減することができ、また電動モータ9の即応性を向上させることができる。
以上の実施形態では、本発明をバックホー等の電動作業機1に適用する場合の例について説明したが、本発明の適用対象はこれに限らず、例えば、ホイールローダ、コンパクトトラックローダ、スキッドステアローダ等の他の建設機械に適用してもよく、トラクター、コンバイン、田植機、芝刈機等の農業機械に適用してもよい。
1 電動作業機
2 機体
5a 作業用操作レバー(作業用操作部材)
5b 走行用操作レバー(作業用操作部材)
5c アンロードレバー(切換部材、アンロード用操作部材)
5d アクセルダイヤル(指示部材)
5e モード選択SW(モード選択スイッチ、選択部材)
7 制御装置
9 電動モータ
10 走行装置(作業装置)
20 作業装置
30 バッテリユニット
37 オイルクーラ(冷却装置)
38 インバータ
42 回転数検出装置
44 油温検出装置
45 AI-SW(アイドリングスイッチ、作業検出装置)
58 アンロード弁(切換部材)
C1~C5 油圧シリンダ
CV コントロールバルブ
ML、MR、MT 油圧モータ
P1、P2 油圧ポンプ
R 回転数
R1 第1回転数
R2 第2回転数
R3 第3回転数
R5 最大回転数、第5回転数
Rrange 指示範囲
T 作動油の温度
T1 第1温度
T4 第2温度
III(T2~T3) 許容温度範囲
2 機体
5a 作業用操作レバー(作業用操作部材)
5b 走行用操作レバー(作業用操作部材)
5c アンロードレバー(切換部材、アンロード用操作部材)
5d アクセルダイヤル(指示部材)
5e モード選択SW(モード選択スイッチ、選択部材)
7 制御装置
9 電動モータ
10 走行装置(作業装置)
20 作業装置
30 バッテリユニット
37 オイルクーラ(冷却装置)
38 インバータ
42 回転数検出装置
44 油温検出装置
45 AI-SW(アイドリングスイッチ、作業検出装置)
58 アンロード弁(切換部材)
C1~C5 油圧シリンダ
CV コントロールバルブ
ML、MR、MT 油圧モータ
P1、P2 油圧ポンプ
R 回転数
R1 第1回転数
R2 第2回転数
R3 第3回転数
R5 最大回転数、第5回転数
Rrange 指示範囲
T 作動油の温度
T1 第1温度
T4 第2温度
III(T2~T3) 許容温度範囲
Claims (11)
- 機体と、
前記機体に搭載されたバッテリユニットと、
前記バッテリユニットからの電力により駆動される電動モータと、
前記電動モータからの動力により作動する油圧機器と、
前記油圧機器から供給された作動油の油圧により作動する作業装置と、
前記電動モータの駆動を制御する制御装置と、
前記作業装置の作動を許可する第1位置と前記作業装置の作動を許可しない第2位置のいずれかに切り換え可能な切換部材と、
前記作動油の温度を検出する油温検出装置と、を備え、
前記制御装置は、前記電動モータの駆動中に、前記切換部材が前記第2位置に切り換えられ、且つ前記作動油の温度が低温状態でも高温状態でもない所定の許容温度範囲内にある場合、前記電動モータの回転数を前記電動モータの停止状態に相当する所定の第1回転数に制御する電動作業機。 - 前記制御装置は、
前記電動モータの駆動中に、前記切換部材が前記第2位置に切り換えられ、且つ前記作動油の温度が前記許容温度範囲内にない場合、前記電動モータの回転数を前記第1回転数より大きく、且つ前記作業装置により作業を行うときの回転数の下限値以下である所定のアイドリング回転数に制御する請求項1に記載の電動作業機。 - 前記制御装置は、
前記電動モータの駆動中に、前記切換部材が前記第2位置に切り換えられた場合、
前記作動油の温度が前記許容温度範囲より低ければ、前記電動モータの回転数を所定の第3回転数に一致するように制御し、
前記作動油の温度が前記許容温度範囲より高ければ、前記電動モータの回転数を前記第1回転数より大きくて前記第3回転数より小さい所定の第2回転数に制御する請求項2に記載の電動作業機。 - 前記作動油の油圧により前記作業装置の作動の有無を検出する作業検出装置を備え、
前記第2回転数は、前記作業検出装置が前記作業装置の作動の有無を検出可能な前記作動油の油圧を生じさせることができる回転数に設定されている請求項3に記載の電動作業機。 - 前記制御装置は、
前記電動モータの駆動中に、前記切換部材が前記第1位置に有り、且つ前記作業装置が所定時間以上作動しなかった場合、
前記作動油の温度が前記許容温度範囲より低いければ、前記電動モータの回転数を前記第3回転数に一致するように制御し、
前記作動油の温度が前記許容温度範囲以上であれば、前記電動モータの回転数を前記第2回転数に制御する請求項4に記載の電動作業機。 - 前記電動モータの回転数を指示するために操作される指示部材を備え、
前記制御装置は、
前記指示部材の操作により指示可能な前記電動モータの回転数を前記作動油の温度に応じて設定する請求項1~5のいずれか1項に記載の電動作業機。 - 第1モードと当該第1モードよりも消費電力を低減する第2モードとのいずれかを選択する選択部材を備え、
前記制御装置は、前記作動油の温度が前記許容温度範囲内にある場合、前記第2モードが前記選択部材により選択されたときの前記指示部材の操作による前記電動モータの回転数の前記指示範囲の上限値を、前記第1モードが前記選択部材により選択されたときの前記指示範囲の上限値より小さく設定する請求項6に記載の電動作業機。 - 前記制御装置は、前記作動油の温度が前記許容温度範囲より低い所定の第1温度未満である場合、前記第1モードと前記第2モードのいずれが前記選択部材により選択されても、前記指示部材の操作による前記電動モータの回転数の前記指示範囲の上限値を所定の最大回転数より小さい値に設定し、
前記最大回転数は、前記作動油の温度が前記許容温度範囲内にあり且つ前記第1モードが選択されている場合に、前記指示部材により指示可能な回転数の上限値である請求項7に記載の電動作業機。 - 前記制御装置は、前記作動油の温度が前記許容温度範囲より高い所定の第2温度よりも高いときに、前記第1モードと前記第2モードのいずれが前記選択部材により選択されても、前記指示部材により指示可能な回転数を前記第3回転数に設定する請求項7又は8に記載の電動作業機。
- 前記作動油を冷却する冷却装置を備え、
前記制御装置は、
油温検出装置により検出された前記作動油の温度が前記許容温度範囲より高いときに、前記冷却装置を駆動することにより前記作動油を冷却し、
前記作動油の温度が前記許容温度範囲以下のときに、前記冷却装置を停止する請求項1~9のいずれか1項に記載の電動作業機。 - 前記バッテリユニットから前記電動モータに供給する電力を調整するインバータと、
前記電動モータの回転数を検出する回転数検出装置と、
前記作業装置の作動を操作する作業用操作部材と、を備え、
前記切換部材は、前記作業装置の作動を許可するロード位置と前記作業装置の作動を許可しないアンロード位置のいずれかに切り換え操作可能なアンロード用操作部材を含み、
前記制御装置は、
前記回転数検出装置により検出された前記電動モータの回転数に基づいて、前記インバータから前記電動モータに供給する電力を調整することで、前記電動モータの回転数を制御する請求項1~10のいずれか1項に記載の電動作業機。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022060020 | 2022-03-31 | ||
| JP2022-060020 | 2022-03-31 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023189344A1 true WO2023189344A1 (ja) | 2023-10-05 |
Family
ID=88200682
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/008995 WO2023189344A1 (ja) | 2022-03-31 | 2023-03-09 | 電動作業機 |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2023189344A1 (ja) |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06346488A (ja) * | 1993-06-07 | 1994-12-20 | Yutani Heavy Ind Ltd | デセル付レバーロック装置 |
| JPH09158255A (ja) * | 1995-12-01 | 1997-06-17 | Shin Caterpillar Mitsubishi Ltd | 車両における電気機器制御方法 |
| JP2000314333A (ja) * | 1999-04-30 | 2000-11-14 | Toyota Motor Corp | 車両の制御装置 |
| JP2012041716A (ja) * | 2010-08-18 | 2012-03-01 | Hitachi Constr Mach Co Ltd | 電動式建設機械 |
| WO2015011832A1 (ja) * | 2013-07-26 | 2015-01-29 | 株式会社小松製作所 | 作業車両及び作業車両の制御方法 |
| JP2016061016A (ja) * | 2014-09-12 | 2016-04-25 | 日立建機株式会社 | ハイブリッド式建設機械 |
| JP2016132967A (ja) * | 2015-01-22 | 2016-07-25 | 日立建機株式会社 | 建設機械 |
| JP2020039239A (ja) * | 2018-09-05 | 2020-03-12 | 株式会社日立建機ティエラ | 電動式建設機械 |
| JP2021080707A (ja) * | 2019-11-18 | 2021-05-27 | 株式会社クボタ | 作業機 |
-
2023
- 2023-03-09 WO PCT/JP2023/008995 patent/WO2023189344A1/ja unknown
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06346488A (ja) * | 1993-06-07 | 1994-12-20 | Yutani Heavy Ind Ltd | デセル付レバーロック装置 |
| JPH09158255A (ja) * | 1995-12-01 | 1997-06-17 | Shin Caterpillar Mitsubishi Ltd | 車両における電気機器制御方法 |
| JP2000314333A (ja) * | 1999-04-30 | 2000-11-14 | Toyota Motor Corp | 車両の制御装置 |
| JP2012041716A (ja) * | 2010-08-18 | 2012-03-01 | Hitachi Constr Mach Co Ltd | 電動式建設機械 |
| WO2015011832A1 (ja) * | 2013-07-26 | 2015-01-29 | 株式会社小松製作所 | 作業車両及び作業車両の制御方法 |
| JP2016061016A (ja) * | 2014-09-12 | 2016-04-25 | 日立建機株式会社 | ハイブリッド式建設機械 |
| JP2016132967A (ja) * | 2015-01-22 | 2016-07-25 | 日立建機株式会社 | 建設機械 |
| JP2020039239A (ja) * | 2018-09-05 | 2020-03-12 | 株式会社日立建機ティエラ | 電動式建設機械 |
| JP2021080707A (ja) * | 2019-11-18 | 2021-05-27 | 株式会社クボタ | 作業機 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20070214782A1 (en) | Hybrid construction machine | |
| JP6944426B2 (ja) | 電動式建設機械 | |
| WO2012033064A1 (ja) | 建設機械のハイブリッドシステム | |
| JP7293093B2 (ja) | 旋回作業機 | |
| WO2019208370A1 (ja) | 電動式作業機械 | |
| JP2021080709A (ja) | 旋回作業機 | |
| JP2020051065A (ja) | 電動式建設機械 | |
| WO2021100663A1 (ja) | 旋回作業機 | |
| JP2019190105A (ja) | 電動式作業機械 | |
| US12031289B2 (en) | Working machine | |
| JP7321897B2 (ja) | 電動作業機 | |
| US20240083265A1 (en) | Electric working machine and charging system for electric working machine | |
| JP6023391B2 (ja) | 建設機械の駆動装置 | |
| WO2023189344A1 (ja) | 電動作業機 | |
| JP7321898B2 (ja) | 旋回作業機 | |
| JP7379319B2 (ja) | 作業機 | |
| JP5596583B2 (ja) | 作業機械の駆動制御装置 | |
| WO2023189343A1 (ja) | 電動作業機 | |
| JP2021080706A (ja) | 旋回作業機 | |
| US20210310214A1 (en) | Working machine | |
| WO2023189992A1 (ja) | 作業機 | |
| JP7321899B2 (ja) | 作業機 | |
| JP7242512B2 (ja) | 旋回作業機 | |
| WO2022130936A1 (ja) | 電動作業機 | |
| US20240223116A1 (en) | Electric working machine and method of controlling electric working machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23779371 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2024511629 Country of ref document: JP Kind code of ref document: A |