WO2023084778A1 - 画像処理装置、画像処理方法、およびプログラム - Google Patents
画像処理装置、画像処理方法、およびプログラム Download PDFInfo
- Publication number
- WO2023084778A1 WO2023084778A1 PCT/JP2021/041924 JP2021041924W WO2023084778A1 WO 2023084778 A1 WO2023084778 A1 WO 2023084778A1 JP 2021041924 W JP2021041924 W JP 2021041924W WO 2023084778 A1 WO2023084778 A1 WO 2023084778A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- detected
- feature amount
- human bodies
- image
- keypoint
- Prior art date
Links
Images


























Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
Abstract
本発明の画像処理装置(100)は、画像に含まれる人体の複数の部位各々に対応する複数のキーポイントを検出する処理を行う骨格構造検出部(101)と、検出されたキーポイント各々の特徴量を算出する特徴量算出部(102)と、部位ごとに複数の人体各々から検出された特徴量を統合して、部位ごとの統合特徴量を算出し、統合特徴量に基づき画像検索又は画像分類を行う処理部(103)と、を有する。処理部(103)は、複数の人体の中の一部から複数の部位のうち第1の部位に対応するキーポイントが検出されておらず、複数の人体の中の他の一部から第1の部位に対応するキーポイントが検出されている場合、他の一部から検出された第1の部位に対応するキーポイントの特徴量に基づき、第1の部位の統合特徴量を算出する。
Description
本発明は、画像処理装置、画像処理方法、およびプログラムに関する。
本発明に関連する技術が特許文献1及び非特許文献1に開示されている。特許文献1には、画像に含まれる人体の複数のキーポイント各々の特徴量を算出し、算出した特徴量に基づき姿勢が似た人体や動きが似た人体を含む画像を検索したり、当該姿勢や動きが似たもの同士でまとめて分類したりする技術が開示されている。また、非特許文献1には、人物の骨格推定に関連する技術が開示されている。
Zhe Cao, Tomas Simon, Shih-En Wei, Yaser Sheikh, "Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields", The IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017, P. 7291-7299
人体の一部が他の物体や自身の他の部分により隠れて見えない画像を用いて特許文献1に開示の検索や分類を行った場合、その精度が悪くなる。人体の一部が隠れておらず、全てのキーポイントを検出可能な画像を用いることで、当該不都合を軽減できる。しかし、そのような画像を準備することが難しい場合がある。
本発明は、姿勢や動きが似た人体を含む画像を検索したり、姿勢や動きが似た人体を含む画像同士でまとめて分類したりする技術において、その精度を向上させることを課題とする。
本発明によれば、
画像に含まれる人体の複数の部位各々に対応する複数のキーポイントを検出する処理を行う骨格構造検出手段と、
検出された前記キーポイント各々の特徴量を算出する特徴量算出手段と、
前記部位ごとに複数の人体各々から検出された前記特徴量を統合して、前記部位ごとの統合特徴量を算出し、前記統合特徴量に基づき画像検索又は画像分類を行う処理手段と、
を有し、
前記処理手段は、
複数の前記人体の中の一部から前記複数の部位のうち第1の部位に対応する前記キーポイントが検出されておらず、複数の前記人体の中の他の一部から前記第1の部位に対応する前記キーポイントが検出されている場合、前記他の一部から検出された前記第1の部位に対応する前記キーポイントの前記特徴量に基づき、前記第1の部位の前記統合特徴量を算出する画像処理装置が提供される。
画像に含まれる人体の複数の部位各々に対応する複数のキーポイントを検出する処理を行う骨格構造検出手段と、
検出された前記キーポイント各々の特徴量を算出する特徴量算出手段と、
前記部位ごとに複数の人体各々から検出された前記特徴量を統合して、前記部位ごとの統合特徴量を算出し、前記統合特徴量に基づき画像検索又は画像分類を行う処理手段と、
を有し、
前記処理手段は、
複数の前記人体の中の一部から前記複数の部位のうち第1の部位に対応する前記キーポイントが検出されておらず、複数の前記人体の中の他の一部から前記第1の部位に対応する前記キーポイントが検出されている場合、前記他の一部から検出された前記第1の部位に対応する前記キーポイントの前記特徴量に基づき、前記第1の部位の前記統合特徴量を算出する画像処理装置が提供される。
また、本発明によれば、
コンピュータが、
画像に含まれる人体の複数の部位各々に対応する複数のキーポイントを検出する処理を行う骨格構造検出工程と、
検出された前記キーポイント各々の特徴量を算出する特徴量算出工程と、
前記部位ごとに複数の人体各々から検出された前記特徴量を統合して、前記部位ごとの統合特徴量を算出し、前記統合特徴量に基づき画像検索又は画像分類を行う処理工程と、
を実行し、
前記処理工程では、
複数の前記人体の中の一部から前記複数の部位のうち第1の部位に対応する前記キーポイントが検出されておらず、複数の前記人体の中の他の一部から前記第1の部位に対応する前記キーポイントが検出されている場合、前記他の一部から検出された前記第1の部位に対応する前記キーポイントの前記特徴量に基づき、前記第1の部位の前記統合特徴量を算出する画像処理方法が提供される。
コンピュータが、
画像に含まれる人体の複数の部位各々に対応する複数のキーポイントを検出する処理を行う骨格構造検出工程と、
検出された前記キーポイント各々の特徴量を算出する特徴量算出工程と、
前記部位ごとに複数の人体各々から検出された前記特徴量を統合して、前記部位ごとの統合特徴量を算出し、前記統合特徴量に基づき画像検索又は画像分類を行う処理工程と、
を実行し、
前記処理工程では、
複数の前記人体の中の一部から前記複数の部位のうち第1の部位に対応する前記キーポイントが検出されておらず、複数の前記人体の中の他の一部から前記第1の部位に対応する前記キーポイントが検出されている場合、前記他の一部から検出された前記第1の部位に対応する前記キーポイントの前記特徴量に基づき、前記第1の部位の前記統合特徴量を算出する画像処理方法が提供される。
また、本発明によれば、
コンピュータを、
画像に含まれる人体の複数の部位各々に対応する複数のキーポイントを検出する処理を行う骨格構造検出手段、
検出された前記キーポイント各々の特徴量を算出する特徴量算出手段、
前記部位ごとに複数の人体各々から検出された前記特徴量を統合して、前記部位ごとの統合特徴量を算出し、前記統合特徴量に基づき画像検索又は画像分類を行う処理手段、
として機能させ、
前記処理手段は、
複数の前記人体の中の一部から前記複数の部位のうち第1の部位に対応する前記キーポイントが検出されておらず、複数の前記人体の中の他の一部から前記第1の部位に対応する前記キーポイントが検出されている場合、前記他の一部から検出された前記第1の部位に対応する前記キーポイントの前記特徴量に基づき、前記第1の部位の前記統合特徴量を算出するプログラムが提供される。
コンピュータを、
画像に含まれる人体の複数の部位各々に対応する複数のキーポイントを検出する処理を行う骨格構造検出手段、
検出された前記キーポイント各々の特徴量を算出する特徴量算出手段、
前記部位ごとに複数の人体各々から検出された前記特徴量を統合して、前記部位ごとの統合特徴量を算出し、前記統合特徴量に基づき画像検索又は画像分類を行う処理手段、
として機能させ、
前記処理手段は、
複数の前記人体の中の一部から前記複数の部位のうち第1の部位に対応する前記キーポイントが検出されておらず、複数の前記人体の中の他の一部から前記第1の部位に対応する前記キーポイントが検出されている場合、前記他の一部から検出された前記第1の部位に対応する前記キーポイントの前記特徴量に基づき、前記第1の部位の前記統合特徴量を算出するプログラムが提供される。
本発明によれば、姿勢や動きが似た人体を含む画像を検索したり、姿勢や動きが似た人体を含む画像同士でまとめて分類したりする技術において、その精度を向上させることができる。
上述した目的、およびその他の目的、特徴および利点は、以下に述べる公的な実施の形態、およびそれに付随する以下の図面によってさらに明らかになる。
以下、本発明の実施の形態について、図面を用いて説明する。尚、すべての図面において、同様な構成要素には同様の符号を付し、適宜説明を省略する。
<第1の実施形態>
「概要」
本実施形態の画像処理装置は、複数の人体各々から人体の各部位(以下、「人体の部位」を単に「部位」という場合がある)に対応するキーポイントを検出し、キーポイントの特徴量を部位ごとに統合して、部位ごとの統合特徴量を算出する。そして、画像処理装置は、算出した部位ごとの統合特徴量に基づき、画像検索や画像分類を行う。このような画像処理装置によれば、1つの人体からあるキーポイントが検出されなかった場合に、他の人体から検出されたそのキーポイントの特徴量で補完することができる。このため、全ての部位各々に対応した統合特徴量を算出することができる。
「概要」
本実施形態の画像処理装置は、複数の人体各々から人体の各部位(以下、「人体の部位」を単に「部位」という場合がある)に対応するキーポイントを検出し、キーポイントの特徴量を部位ごとに統合して、部位ごとの統合特徴量を算出する。そして、画像処理装置は、算出した部位ごとの統合特徴量に基づき、画像検索や画像分類を行う。このような画像処理装置によれば、1つの人体からあるキーポイントが検出されなかった場合に、他の人体から検出されたそのキーポイントの特徴量で補完することができる。このため、全ての部位各々に対応した統合特徴量を算出することができる。
図1を用いて、統合特徴量を算出する処理の一例を説明する。図示する第1の静止画は、手を洗っている人物を当該人物の左側から撮影した画像である。第1の静止画では、当該人物の身体の右側の一部は隠れて見えていない。このような第1の静止画に対して人体のN個のキーポイントを検出する処理を行った場合、N個のキーポイントの中の一部、すなわち隠れていない部分に含まれるキーポイントは検出されるが、N個のキーポイントの中の他の一部、すなわち隠れている部分に含まれるキーポイントは検出されない。結果、いくつかのキーポイントの特徴量は欠損した状態となる。
同様に、第2の静止画は、手を洗っている人物を当該人物の右側から撮影した画像である。第2の静止画では、当該人物の身体の左側の一部は隠れて見えていない。このような第2の静止画に対して人体のN個のキーポイントを検出する処理を行った場合、N個のキーポイントの中の一部、すなわち隠れていない部分に含まれるキーポイントは検出されるが、N個のキーポイントの中の他の一部、すなわち隠れている部分に含まれるキーポイントは検出されない。結果、いくつかのキーポイントの特徴量は欠損した状態となる。
本実施形態の画像処理装置がこのような第1の静止画に含まれる人体から検出されたキーポイントの特徴量と、第2の静止画に含まれる人体から検出されたキーポイントの特徴量を統合した場合、第1の静止画に含まれる人体から検出されなかったキーポイントの特徴量を、第2の静止画に含まれる人体から検出されたキーポイントの特徴量で補完することができる。同様に、第2の静止画に含まれる人体から検出されなかったキーポイントの特徴量を、第1の静止画に含まれる人体から検出されたキーポイントの特徴量で補完することができる。結果、N個の部位全てに対応した統合特徴量を算出することができる。そして、N個の部位全てに対応した統合特徴量を用いて、姿勢や動きが似た人体を含む画像を検索したり、姿勢や動きが似た人体を含む画像同士でまとめて分類したりすることで、その精度を向上する。
「ハードウエア構成」
次に、画像処理装置のハードウエア構成の一例を説明する。画像処理装置の各機能部は、任意のコンピュータのCPU(Central Processing Unit)、メモリ、メモリにロードされるプログラム、そのプログラムを格納するハードディスク等の記憶ユニット(あらかじめ装置を出荷する段階から格納されているプログラムのほか、CD(Compact Disc)等の記憶媒体やインターネット上のサーバ等からダウンロードされたプログラムをも格納できる)、ネットワーク接続用インターフェイスを中心にハードウエアとソフトウエアの任意の組合せによって実現される。そして、その実現方法、装置にはいろいろな変形例があることは、当業者には理解されるところである。
次に、画像処理装置のハードウエア構成の一例を説明する。画像処理装置の各機能部は、任意のコンピュータのCPU(Central Processing Unit)、メモリ、メモリにロードされるプログラム、そのプログラムを格納するハードディスク等の記憶ユニット(あらかじめ装置を出荷する段階から格納されているプログラムのほか、CD(Compact Disc)等の記憶媒体やインターネット上のサーバ等からダウンロードされたプログラムをも格納できる)、ネットワーク接続用インターフェイスを中心にハードウエアとソフトウエアの任意の組合せによって実現される。そして、その実現方法、装置にはいろいろな変形例があることは、当業者には理解されるところである。
図2は、画像処理装置のハードウエア構成を例示するブロック図である。図2に示すように、画像処理装置は、プロセッサ1A、メモリ2A、入出力インターフェイス3A、周辺回路4A、バス5Aを有する。周辺回路4Aには、様々なモジュールが含まれる。画像処理装置は周辺回路4Aを有さなくてもよい。なお、画像処理装置は物理的及び/又は論理的に分かれた複数の装置で構成されてもよい。この場合、複数の装置各々が上記ハードウエア構成を備えることができる。
バス5Aは、プロセッサ1A、メモリ2A、周辺回路4A及び入出力インターフェイス3Aが相互にデータを送受信するためのデータ伝送路である。プロセッサ1Aは、例えばCPU、GPU(Graphics Processing Unit)などの演算処理装置である。メモリ2Aは、例えばRAM(Random Access Memory)やROM(Read Only Memory)などのメモリである。入出力インターフェイス3Aは、入力装置、外部装置、外部サーバ、外部センサ、カメラ等から情報を取得するためのインターフェイスや、出力装置、外部装置、外部サーバ等に情報を出力するためのインターフェイスなどを含む。入力装置は、例えばキーボード、マウス、マイク、物理ボタン、タッチパネル等である。出力装置は、例えばディスプレイ、スピーカ、プリンター、メーラ等である。プロセッサ1Aは、各モジュールに指令を出し、それらの演算結果をもとに演算を行うことができる。
「機能構成」
図3に、本実施形態の画像処理装置100の機能ブロック図の一例を示す。図示する画像処理装置100は、骨格構造検出部101と、特徴量算出部102と、処理部103と、記憶部104とを有する。なお、画像処理装置100は、記憶部104を有さなくてもよい。この場合、外部装置が記憶部104を備える。そして、記憶部104は、画像処理装置100からアクセス可能に構成される。
図3に、本実施形態の画像処理装置100の機能ブロック図の一例を示す。図示する画像処理装置100は、骨格構造検出部101と、特徴量算出部102と、処理部103と、記憶部104とを有する。なお、画像処理装置100は、記憶部104を有さなくてもよい。この場合、外部装置が記憶部104を備える。そして、記憶部104は、画像処理装置100からアクセス可能に構成される。
骨格構造検出部101は、画像に含まれる人体の複数の部位各々に対応するN(Nは2以上の整数)個のキーポイントを検出する処理を行う。画像は、静止画及び動画を含む概念である。動画が処理対象の場合、骨格構造検出部101は、フレーム画像毎にキーポイントを検出する処理を行う。骨格構造検出部101による当該処理は、特許文献1に開示されている技術を用いて実現される。詳細は省略するが、特許文献1に開示されている技術では、非特許文献1に開示されたOpenPose等の骨格推定技術を利用して骨格構造の検出を行う。当該技術で検出される骨格構造は、関節等の特徴的な点である「キーポイント」と、キーポイント間のリンクを示す「ボーン(ボーンリンク)」とから構成される。
図4は、骨格構造検出部101により検出される人体モデル300の骨格構造を示しており、図5及び図6は、骨格構造の検出例を示している。骨格構造検出部101は、OpenPose等の骨格推定技術を用いて、2次元の画像から図4のような人体モデル(2次元骨格モデル)300の骨格構造を検出する。人体モデル300は、人物の関節等のキーポイントと、各キーポイントを結ぶボーンから構成された2次元モデルである。
骨格構造検出部101は、例えば、画像の中からキーポイントとなり得る特徴点を抽出し、キーポイントの画像を機械学習した情報を参照して、人体のN個のキーポイントを検出する。検出するN個のキーポイントは予め定められる。検出するキーポイントの数(すなわち、Nの数)や、人体のどの部分を検出するキーポイントとするかは様々であり、あらゆるバリエーションを採用できる。
以下では、図4に示すように、頭A1、首A2、右肩A31、左肩A32、右肘A41、左肘A42、右手A51、左手A52、右腰A61、左腰A62、右膝A71、左膝A72、右足A81、左足A82が、検出対象のN個のキーポイント(N=14)として定められているものとする。なお、図4に示す人体モデル300では、これらのキーポイントを連結した人物の骨として、頭A1と首A2を結ぶボーンB1、首A2と右肩A31及び左肩A32をそれぞれ結ぶボーンB21及びボーンB22、右肩A31及び左肩A32と右肘A41及び左肘A42をそれぞれ結ぶボーンB31及びボーンB32、右肘A41及び左肘A42と右手A51及び左手A52をそれぞれ結ぶボーンB41及びボーンB42、首A2と右腰A61及び左腰A62をそれぞれ結ぶボーンB51及びボーンB52、右腰A61及び左腰A62と右膝A71及び左膝A72をそれぞれ結ぶボーンB61及びボーンB62、右膝A71及び左膝A72と右足A81及び左足A82をそれぞれ結ぶボーンB71及びボーンB72がさらに定められている。
図5は、直立した状態の人体からキーポイントを検出した例である。図5では、直立した人体が正面から撮像されており、14個のキーポイントすべてが検出されている。図6は、しゃがみ込んでいる状態の人体からキーポイントを検出した例である。図6では、しゃがみ込んでいる人体が右側から撮像されており、14個のキーポイントの中の一部のみが検出されている。具体的には、図6では、頭A1、首A2、右肩A31、右肘A41、右手A51、右腰A61、右膝A71及び右足A81が検出されており、左肩A32、左肘A42、左手A52、左腰A62、左膝A72及び左足A82が検出されていない。
図3に戻り、特徴量算出部102は、検出された2次元の骨格構造の特徴量を算出する。例えば、特徴量算出部102は、検出されたキーポイント各々の特徴量を算出する。
骨格構造の特徴量は、人物の骨格の特徴を示しており、人物の骨格に基づいて人物の状態(姿勢や動き)を分類や検索するための要素となる。通常、この特徴量は、複数のパラメータを含んでいる。そして特徴量は、骨格構造の全体の特徴量でもよいし、骨格構造の一部の特徴量でもよく、骨格構造の各部のように複数の特徴量を含んでもよい。特徴量の算出方法は、機械学習や正規化等の任意の方法でよく、正規化として最小値や最大値を求めてもよい。一例として、特徴量は、骨格構造を機械学習することで得られた特徴量や、骨格構造の頭部から足部までの画像上の大きさ、画像上の骨格構造を含む骨格領域の上下方向における複数のキーポイントの相対的な位置関係、当該骨格領域の左右方向における複数のキーポイントの相対的な位置関係等である。骨格構造の大きさは、画像上の骨格構造を含む骨格領域の上下方向の高さや面積等である。上下方向(高さ方向または縦方向)は、画像における上下の方向(Y軸方向)であり、例えば、地面(基準面)に対し垂直な方向である。また、左右方向(横方向)は、画像における左右の方向(X軸方向)であり、例えば、地面に対し平行な方向である。
なお、ユーザが望む分類や検索を行うためには、分類や検索処理に対しロバスト性を有する特徴量を用いることが好ましい。例えば、ユーザが、人物の向きや体型に依存しない分類や検索を望む場合、人物の向きや体型にロバストな特徴量を使用してもよい。同じ姿勢で様々な方向に向いている人物の骨格や同じ姿勢で様々な体型の人物の骨格を学習することや、骨格の上下方向のみの特徴を抽出することで、人物の向きや体型に依存しない特徴量を得ることができる。
特徴量算出部102による上記処理は、特許文献1に開示されている技術を用いて実現される。
図7は、特徴量算出部102が求めた複数のキーポイント各々の特徴量の例を示している。なお、ここで例示するキーポイントの特徴量はあくまで一例であり、これに限定されない。
この例では、キーポイントの特徴量は、画像上の骨格構造を含む骨格領域の上下方向における複数のキーポイントの相対的な位置関係を示す。首のキーポイントA2を基準点とするため、キーポイントA2の特徴量は0.0となり、首と同じ高さの右肩のキーポイントA31及び左肩のキーポイントA32の特徴量も0.0である。首よりも高い頭のキーポイントA1の特徴量は-0.2である。首よりも低い右手のキーポイントA51及び左手のキーポイントA52の特徴量は0.4であり、右足のキーポイントA81及び左足のキーポイントA82の特徴量は0.9である。この状態から人物が左手を挙げると、図8のように左手が基準点よりも高くなるため、左手のキーポイントA52の特徴量は-0.4となる。一方で、Y軸の座標のみを用いて正規化を行っているため、図9のように、図7に比べて骨格構造の幅が変わっても特徴量は変わらない。すなわち、当該例の特徴量(正規化値)は、骨格構造(キーポイント)の高さ方向(Y方向)の特徴を示しており、骨格構造の横方向(X方向)の変化に影響を受けない。
図3に戻り、処理部103は、部位ごとにM(Mは2以上の整数)個の人体各々から検出されたキーポイントの特徴量を統合して、部位ごとの統合特徴量を算出する。そして、処理部103は、部位ごとの統合特徴量に基づき画像検索又は画像分類を行う。なお、上述の通り、複数のキーポイントは、複数の部位各々に対応する。このため、「部位ごと」に処理を行うことは「キーポイントごと」に処理を行うことと同じ意味である。例えば、部位ごとに算出することで得られる「部位ごとの統合特徴量」は、キーポイントごとに算出することで得られる「N個のキーポイント各々の統合特徴量」と同じ意味である。
-統合特徴量を算出する処理-
〇静止画を処理対象とする場合
まず、ユーザが、統合特徴量を算出する処理の対象とするM個の人体を指定する。例えば、ユーザは、各々が1つの人体を含むM個の静止画を指定(M個の静止画ファイルの指定)することで、M個の人体を指定してもよい。M個の静止画の指定は、例えばM個の静止画を画像処理装置100に入力する操作や、画像処理装置100に記憶されている複数の静止画の中からM個の静止画を選択する操作等である。この場合、上述した骨格構造検出部101は、指定されたM個の静止画各々に対し、N個のキーポイントを検出する処理を行う。なお、N個すべてのキーポイントが検出される場合もあれば、N個のキーポイントの一部のみが検出される場合もある。特徴量算出部102は、検出されたキーポイント各々の特徴量を算出する。
〇静止画を処理対象とする場合
まず、ユーザが、統合特徴量を算出する処理の対象とするM個の人体を指定する。例えば、ユーザは、各々が1つの人体を含むM個の静止画を指定(M個の静止画ファイルの指定)することで、M個の人体を指定してもよい。M個の静止画の指定は、例えばM個の静止画を画像処理装置100に入力する操作や、画像処理装置100に記憶されている複数の静止画の中からM個の静止画を選択する操作等である。この場合、上述した骨格構造検出部101は、指定されたM個の静止画各々に対し、N個のキーポイントを検出する処理を行う。なお、N個すべてのキーポイントが検出される場合もあれば、N個のキーポイントの一部のみが検出される場合もある。特徴量算出部102は、検出されたキーポイント各々の特徴量を算出する。
その他、ユーザは、少なくとも1つの静止画を指定(少なくとも1つの静止画ファイルの指定)するとともに、指定した少なくとも1つの静止画内で各々が1つの人体を含むM個の領域を指定することで、M個の人体を指定してもよい。なお、1つの静止画の中から複数の領域(すなわち、複数の人体)を指定してもよい。静止画の中の一部の領域を指定する処理は、従来のあらゆる技術を利用して実現できる。この場合、上述した骨格構造検出部101は、指定されたM個の領域各々に対し、N個のキーポイントを検出する処理を行う。なお、N個すべてのキーポイントが検出される場合もあれば、N個のキーポイントの一部のみが検出される場合もある。特徴量算出部102は、検出されたキーポイント各々の特徴量を算出する。
ユーザが指定したM個の人体各々のキーポイントの特徴量が算出された後、処理部103は、キーポイント毎にそれらを統合して統合特徴量を算出する。処理部103は、例えばN個のキーポイントの中から順に1つを選択し、統合特徴量を算出する処理を行う。以下では、N個のキーポイントの中の1つであって、処理の対象として選択されているキーポイントを「第1のキーポイント」と呼ぶ。
処理部103は、M個の人体の中の一部から第1のキーポイントが検出されておらず、M個の人体の中の他の一部から第1のキーポイントが検出されている場合、他の一部から検出された第1のキーポイントの特徴量に基づき、第1のキーポイントの統合特徴量(「第1の部位の統合特徴量」と同義)を算出する。当該処理により、複数の人体各々から算出されたキーポイントの特徴量を、互いに欠けている部分を補完し合って統合することが可能となる。
なお、第1のキーポイントの検出状態は、(1)M個の人体の中の1つのみから検出、(2)M個の人体の中の複数から検出、(3)M個の人体の中のいずれからも検出されない、の中のいずれかとなる。処理部103は、各検出状態に応じた処理で、統合特徴量を算出することができる。以下、詳細に説明する。
(1)M個の人体の中の1つのみから検出
M個の人体の中の1つのみから第1のキーポイントが検出されている場合、処理部103は、その1つの人体から検出された第1のキーポイントの特徴量を、第1のキーポイントの統合特徴量とする。
M個の人体の中の1つのみから第1のキーポイントが検出されている場合、処理部103は、その1つの人体から検出された第1のキーポイントの特徴量を、第1のキーポイントの統合特徴量とする。
(2)M個の人体の中の複数の人体から検出
M個の人体の中の複数から第1のキーポイントが検出されている場合、処理部103は、以下の算出例1乃至4のいずれかにより、第1のキーポイントの統合特徴量を算出する。
M個の人体の中の複数から第1のキーポイントが検出されている場合、処理部103は、以下の算出例1乃至4のいずれかにより、第1のキーポイントの統合特徴量を算出する。
・算出例1
M個の人体の中の複数から第1のキーポイントが検出されている場合、処理部103は、複数の人体から検出された第1のキーポイントの特徴量の統計値を、第1のキーポイントの統合特徴量として算出する。統計値は、平均値、中央値、最頻値、最大値、又は最小値である。
M個の人体の中の複数から第1のキーポイントが検出されている場合、処理部103は、複数の人体から検出された第1のキーポイントの特徴量の統計値を、第1のキーポイントの統合特徴量として算出する。統計値は、平均値、中央値、最頻値、最大値、又は最小値である。
・算出例2
M個の人体の中の複数から第1のキーポイントが検出されている場合、処理部103は、複数の人体から検出された第1のキーポイントの特徴量の中の確信度が最も高い特徴量を、第1のキーポイントの統合特徴量とする。確信度の算出方法は特段制限されない。例えば、OpenPose等の骨格推定技術において、検出された各キーポイントに紐付けて出力されるスコアを、各キーポイントの確信度としてもよい。
M個の人体の中の複数から第1のキーポイントが検出されている場合、処理部103は、複数の人体から検出された第1のキーポイントの特徴量の中の確信度が最も高い特徴量を、第1のキーポイントの統合特徴量とする。確信度の算出方法は特段制限されない。例えば、OpenPose等の骨格推定技術において、検出された各キーポイントに紐付けて出力されるスコアを、各キーポイントの確信度としてもよい。
・算出例3
M個の人体の中の複数から第1のキーポイントが検出されている場合、処理部103は、複数の人体各々から検出された第1のキーポイントの特徴量の確信度に応じた第1のキーポイントの特徴量の重み付け平均値を、第1のキーポイントの統合特徴量として算出する。確信度の算出方法は特段制限されない。例えば、OpenPose等の骨格推定技術において、検出された各キーポイントに紐付けて出力されるスコアを、各キーポイントの確信度としてもよい。
M個の人体の中の複数から第1のキーポイントが検出されている場合、処理部103は、複数の人体各々から検出された第1のキーポイントの特徴量の確信度に応じた第1のキーポイントの特徴量の重み付け平均値を、第1のキーポイントの統合特徴量として算出する。確信度の算出方法は特段制限されない。例えば、OpenPose等の骨格推定技術において、検出された各キーポイントに紐付けて出力されるスコアを、各キーポイントの確信度としてもよい。
・算出例4
予め、ユーザは、指定したM個の人体各々の優先順位を指定しておく。指定した内容は画像処理装置100に入力される。そして、M個の人体の中の複数から第1のキーポイントが検出されている場合、処理部103は、第1のキーポイントが検出された複数の人体の中の最も優先順位が高い人体から検出された第1のキーポイントの特徴量を、第1のキーポイントの統合特徴量とする。
予め、ユーザは、指定したM個の人体各々の優先順位を指定しておく。指定した内容は画像処理装置100に入力される。そして、M個の人体の中の複数から第1のキーポイントが検出されている場合、処理部103は、第1のキーポイントが検出された複数の人体の中の最も優先順位が高い人体から検出された第1のキーポイントの特徴量を、第1のキーポイントの統合特徴量とする。
(3)M個の人体の中のいずれからも検出されない
M個の人体の中のいずれからも第1のキーポイントが検出されていない場合、処理部103は、第1のキーポイントの統合特徴量を算出しない。
M個の人体の中のいずれからも第1のキーポイントが検出されていない場合、処理部103は、第1のキーポイントの統合特徴量を算出しない。
〇動画を処理対象とする場合
まず、ユーザが、統合特徴量を算出する処理の対象とするM個の人体を指定する。例えば、ユーザは、各々が1つの人体を含むM個の動画を指定(M個の動画ファイルの指定)することで、M個の人体を指定してもよい。M個の動画の指定は、例えばM個の動画を画像処理装置100に入力する操作や、画像処理装置100に記憶されている複数の動画の中からM個の動画を選択する操作等である。この場合、上述した骨格構造検出部101は、指定されたM個の動画各々のフレーム画像に対し、N個のキーポイントを検出する処理を行う。なお、N個すべてのキーポイントが検出される場合もあれば、N個のキーポイントの一部のみが検出される場合もある。特徴量算出部102は、検出されたキーポイント各々の特徴量を算出する。
まず、ユーザが、統合特徴量を算出する処理の対象とするM個の人体を指定する。例えば、ユーザは、各々が1つの人体を含むM個の動画を指定(M個の動画ファイルの指定)することで、M個の人体を指定してもよい。M個の動画の指定は、例えばM個の動画を画像処理装置100に入力する操作や、画像処理装置100に記憶されている複数の動画の中からM個の動画を選択する操作等である。この場合、上述した骨格構造検出部101は、指定されたM個の動画各々のフレーム画像に対し、N個のキーポイントを検出する処理を行う。なお、N個すべてのキーポイントが検出される場合もあれば、N個のキーポイントの一部のみが検出される場合もある。特徴量算出部102は、検出されたキーポイント各々の特徴量を算出する。
その他、ユーザは、少なくとも1つの動画を指定(少なくとも1つの動画ファイルの指定)するとともに、指定した少なくとも1つの動画内で各々が1つの人体を含むM個のシーン(動画の中の一部のシーン、動画が含む複数のフレーム画像の中の一部のフレーム画像で構成されるシーン)やM個の領域を指定することで、M個の人体を指定してもよい。なお、1つの動画の中から複数のシーンや複数の領域(すなわち、複数の人体)を指定してもよい。動画の中の一部のシーンや一部の領域を指定する処理は、従来のあらゆる技術を利用して実現できる。この場合、上述した骨格構造検出部101は、指定されたM個のシーン各々のフレーム画像(又は、フレーム画像の中のユーザが指定した一部領域)に対し、N個のキーポイントを検出する処理を行う。なお、N個すべてのキーポイントが検出される場合もあれば、N個のキーポイントの一部のみが検出される場合もある。特徴量算出部102は、検出されたキーポイント各々の特徴量を算出する。
ユーザが指定したM個の人体各々のキーポイントの特徴量が算出された後、処理部103は、キーポイント毎にそれらを統合して統合特徴量を算出する。処理部103は、M個の動画やM個のシーンにおけるフレーム画像の対応関係を特定し、互いに対応する複数のフレーム画像各々から検出されたキーポイントの特徴量を、キーポイント毎に統合する。以下、図10乃至図12を用いてより詳細に説明する。
図10には、2個(M=2)の動画(シーン)が示されている。各々、1つの人体を含む。また、各々、複数のフレーム画像を含む。
処理部103は、図11に示すように、第1の動画内で所定の動きを行う人体と、第2の動画内で所定の動きを行う人体とが同様の姿勢をとるフレーム画像同士を対応付ける。図11では、互いに対応するフレーム画像を線で結んでいる。なお、図示するように、第1の動画の1つのフレーム画像が第2の動画の複数のフレーム画像に対応付けられてもよい。また、第2の動画の1つのフレーム画像が第1の動画の複数のフレーム画像に対応付けられてもよい。上記対応関係の特定は、例えば、DTW(Dinamic Time Warping)等の技術を利用して実現することができる。この時、対応関係の特定に必要な距離スコアとしては、特徴量間の距離(マンハッタン距離やユークリッド距離)などを用いることができる。当該技術によれば、図10に示すように、第1の動画と第2の動画の時間長が互いに異なる(すなわち、互いのフレーム画像の数が異なる)場合でも、上記対応関係を特定することができる。
この場合、図12に示すように、対応する複数のフレーム画像の組み合わせ毎にN個のキーポイントの特徴量を算出することで、N個のキーポイントの統合特徴量の時系列データが得られる。図12のF11+F21は、図10の第1の動画のフレーム画像F11から検出された人体のキーポイントの特徴量と、第2の動画のフレーム画像F21から検出された人体のキーポイントの特徴量とを統合して得られたN個のキーポイントの統合特徴量である。対応するフレーム画像から検出された人体のキーポイントの特徴量を統合する手段は、上述した静止画から検出された人体のキーポイントの特徴量を統合する手段と同様である。
-画像検索処理-
画像検索処理においては、処理部103は、上述のようにユーザが指定したM個の人体に基づき算出した統合特徴量をクエリとして、統合特徴量で示される姿勢と類似する姿勢の人体を含む静止画や、統合特徴量の時系列データで示される動きと類似する動きをする人体を含む動画等を検索する。検索の仕方は、特許文献1に開示の技術を利用して実現できる。
画像検索処理においては、処理部103は、上述のようにユーザが指定したM個の人体に基づき算出した統合特徴量をクエリとして、統合特徴量で示される姿勢と類似する姿勢の人体を含む静止画や、統合特徴量の時系列データで示される動きと類似する動きをする人体を含む動画等を検索する。検索の仕方は、特許文献1に開示の技術を利用して実現できる。
-画像分類処理-
画像分類処理においては、処理部103は、上述のようにユーザが指定したM個の人体に基づき算出した統合特徴量で示される姿勢や動きを、分類処理の1つの対象として扱い、姿勢や動き似たもの同士でまとめて分類する。分類の仕方は、特許文献1に開示の技術を利用して実現できる。
画像分類処理においては、処理部103は、上述のようにユーザが指定したM個の人体に基づき算出した統合特徴量で示される姿勢や動きを、分類処理の1つの対象として扱い、姿勢や動き似たもの同士でまとめて分類する。分類の仕方は、特許文献1に開示の技術を利用して実現できる。
-その他の処理-
処理部103は、上述のようにユーザが指定したM個の人体に基づき算出した統合特徴量で示される姿勢や動きを、1つの処理対象としてデータベース(記憶部104)に登録してもよい。データベースに登録された複数の姿勢や動きは、例えば上記画像検索処理においてクエリと照合される対象となってもよいし、上記画像分類処理において分類処理の対象となってもよい。例えば、複数のカメラで同一人物を複数の角度から撮影し、この複数のカメラで撮影された複数の画像に含まれる同一人物の複数の人体を上記M個の人体として指定することで、その人体の姿勢や動きをよく示した統合特徴量が算出され、データベースに登録される。
処理部103は、上述のようにユーザが指定したM個の人体に基づき算出した統合特徴量で示される姿勢や動きを、1つの処理対象としてデータベース(記憶部104)に登録してもよい。データベースに登録された複数の姿勢や動きは、例えば上記画像検索処理においてクエリと照合される対象となってもよいし、上記画像分類処理において分類処理の対象となってもよい。例えば、複数のカメラで同一人物を複数の角度から撮影し、この複数のカメラで撮影された複数の画像に含まれる同一人物の複数の人体を上記M個の人体として指定することで、その人体の姿勢や動きをよく示した統合特徴量が算出され、データベースに登録される。
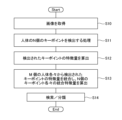
次に、図13のフローチャートを用いて、画像処理装置100の処理の流れの一例を説明する。
まず、画像処理装置100は、少なくとも1つの画像を取得する(S10)。次いで、画像処理装置100は、取得した少なく1つの画像に含まれるM個の人体各々からN個のキーポイントを検出する処理を行う(S11)。各人体からは、N個すべてのキーポイントが検出される場合もあれば、N個のキーポイントの一部のみが検出される場合もある。
次いで、画像処理装置100は、人体毎に、検出されたキーポイントの特徴量を算出する(S12)。次いで、画像処理装置100は、M個の人体各々から検出されたキーポイントの特徴量を統合して、N個のキーポイント各々の統合特徴量を算出する(S13)。次いで、画像処理装置100は、S13で算出された統合特徴量に基づき画像検索又は画像分類を行う(S14)。
ここで、図14のフローチャートを用いて、S13の処理の一例を詳細に説明する。
画像処理装置100は、N個のキーポイントの中の1つを処理対象として選択する(S20)。以下、選択されたキーポイントを第1のキーポイントと呼ぶ。
その後、画像処理装置100は、第1のキーポイントが検出された人体の数に応じた処理を行う。M個の人体の中の1つのみから第1のキーポイントが検出されている場合(S21の「1個」)、画像処理装置100は、その1つの人体から検出された第1のキーポイントの特徴量を、第1のキーポイントの統合特徴量として出力する(S23)。
M個の人体の中の複数から第1のキーポイントが検出されている場合(S21の「複数」)、画像処理装置100は、その複数の人体から検出された第1のキーポイントの特徴量に基づく演算処理で算出した値を、第1のキーポイントの統合特徴量として出力する(S24)。演算処理の詳細は上述の通りである。
M個の人体の中のいずれからも第1のキーポイントが検出されていない場合(S21の「0個」)、処理部103は、第1のキーポイントの統合特徴量を算出せず、結合特徴量がない旨を出力する(S22)。
「作用効果」
画像において、人体の一部が他の物体や自身の他の部分により隠れて見えない場合がある。このような画像を特許文献1に開示の技術で処理した場合、隠れている部分のキーポイントは検出されず、その特徴量も算出されない。そして、検出された一部のキーポイントの特徴量のみに基づき検索/分類した場合、身体の少なくとも一部分の姿勢が似た人体や身体の少なくとも一部分の動きが似た人体を含む画像が検索されたり、身体の少なくとも一部分の姿勢や動きが似たもの同士でまとめて分類されたりする。結果、検索や分類の精度が低下する。
画像において、人体の一部が他の物体や自身の他の部分により隠れて見えない場合がある。このような画像を特許文献1に開示の技術で処理した場合、隠れている部分のキーポイントは検出されず、その特徴量も算出されない。そして、検出された一部のキーポイントの特徴量のみに基づき検索/分類した場合、身体の少なくとも一部分の姿勢が似た人体や身体の少なくとも一部分の動きが似た人体を含む画像が検索されたり、身体の少なくとも一部分の姿勢や動きが似たもの同士でまとめて分類されたりする。結果、検索や分類の精度が低下する。
本実施形態の画像処理装置100は、複数の人体各々から検出されたキーポイントの特徴量を統合して、複数のキーポイント各々の統合特徴量を算出する。そして、画像処理装置は、算出した統合特徴量に基づき、画像検索や画像分類を行う。このような画像処理装置によればある人体から検出されなかったキーポイントの特徴量を、他の人体から検出されたキーポイントの特徴量で補完することができる。このため、全てのキーポイント各々に対応した統合特徴量を算出することができる。そして、全てのキーポイント各々に対応した統合特徴量に基づき画像検索や画像分類を行うことで、その精度が向上する。
本実施形態では、例えば、図15及び図16に示すような複数の人体PのN個のキーポイントを統合することができる。図15の静止画は、手を洗っている人物を当該人物の左側から撮影した画像である。第1の静止画では、当該人物の身体の左側は見えているが、身体の右側は隠れて見えていない。結果、当該人物の身体の左側部分に含まれるキーポイントは検出されているが、右側部分に含まれるキーポイントは検出されていない。図16の静止画は、手を洗っている人物を当該人物の右側から撮影した画像である。第2の静止画では、当該人物の身体の右側は見えているが、身体の左側は隠れて見えていない。結果、当該人物の身体の右側部分に含まれるキーポイントは検出されているが、左側部分に含まれるキーポイントは検出されていない。このような2つの静止画から検出された人体のキーポイントの特徴量を統合することで、互いの欠けている部分を互いに補完し合い、N個の全てのキーポイント各々に対応した統合特徴量を算出することができる。
また、本実施形態では、例えば、図17及び図18に示すような複数の人体PのN個のキーポイントを統合することができる。図17の静止画は、左手を腰に当てて立っている人物を当該人物の正面から撮影した画像である。第1の静止画では、当該人物の身体において隠れている部分はない。結果、当該人体PからはN個全てのキーポイントが検出されている。図18の静止画は、右手を挙げて立っている人物を当該人物の正面から撮影した画像である。第2の静止画では、当該人物の左半身の一部が車両Qで隠れている。結果、当該人物の身体の隠れていない部分に含まれるキーポイントは検出されているが、隠れている部分に含まれるキーポイントは検出されていない。このような2つの静止画から検出された人体のキーポイントの特徴量を統合することで、第2の静止画で欠けている部分を第1の静止画で補完し、N個の全てのキーポイント各々に対応した統合特徴量を算出することができる。この例の場合、例えば、上述した例4の手法、すなわちM個の人体各々の優先順位に基づく統合特徴量の算出を行ってもよい。例えば、ユーザは、第2の静止画に含まれる人体を第1の静止画に含まれる人体よりも優先順位を高く指定する。このようにした場合、第1の静止画及び第2の静止画両方に現れている部分の特徴は、第2の静止画に現れている部分が採用されることとなる。結果、算出されたN個の統合特徴量は、第1の静止画のように左手を腰に当て、第2の静止画のように右手を挙げて立っている姿勢を示すこととなる。
また、本実施形態では、例えば、図19及び図20に示すような複数の人体PのN個のキーポイントを統合することができる。図19の動画は、立った状態で右手を挙げる動きをする人物を当該人物の正面から撮影した画像である。第2の動画では、当該人物の左半身の一部が車両Qで隠れている。結果、当該人物の身体の隠れていない部分に含まれるキーポイントは検出されているが、隠れている部分に含まれるキーポイントは検出されていない。図20の動画は、腰に手を当てて立った状態の人物を当該人物の正面から撮影した画像である。第2の動画では、当該人物の身体において隠れている部分はない。結果、当該人体PからはN個全てのキーポイントが検出されている。このような2つの動画から検出された人体のキーポイントの特徴量を統合することで、第1の動画で欠けている部分を第2の動画で補完し、N個の全てのキーポイント各々に対応した統合特徴量を算出することができる。この例の場合、例えば、上述した例4の手法、すなわちM個の人体各々の優先順位に基づく統合特徴量の算出を行ってもよい。例えば、ユーザは、第1の動画に含まれる人体を第2の動画に含まれる人体よりも優先順位を高く指定する。このようにした場合、第1の動画及び第2の動画両方に現れている部分の特徴は、第1の動画に現れている部分が採用されることとなる。このようにした場合、算出されたN個の統合特徴量の時系列データは、第2の動画のように左手を腰に当て、第1の動画に示すように立った状態で右手を挙げる動きを示すこととなる。
なお、M個の人体は、同一人物の人体であってもよいし、異なる人物の人体であってもよい。
<第2の実施形態>
本実施形態の画像処理装置100は、M個の人体各々から検出されたキーポイントを統合して統合特徴量を算出する処理の詳細が、第1の実施形態と異なる。第1の実施形態では、例えば図14に示すようなフローで、統合特徴量を算出した。本実施形態では、画像処理装置100は、ユーザ入力で指定された手法で、M個の人体各々から検出されたキーポイントを統合して統合特徴量を算出する。以下、詳細に説明する。
本実施形態の画像処理装置100は、M個の人体各々から検出されたキーポイントを統合して統合特徴量を算出する処理の詳細が、第1の実施形態と異なる。第1の実施形態では、例えば図14に示すようなフローで、統合特徴量を算出した。本実施形態では、画像処理装置100は、ユーザ入力で指定された手法で、M個の人体各々から検出されたキーポイントを統合して統合特徴量を算出する。以下、詳細に説明する。
図21に、本実施形態の画像処理装置100の機能ブロック図の一例を示す。図示する画像処理装置100は、骨格構造検出部101と、特徴量算出部102と、処理部103と、記憶部104と、入力部106とを有する。なお、画像処理装置100は、記憶部104を有さなくてもよい。この場合、外部装置が記憶部104を備える。そして、記憶部104は、画像処理装置100からアクセス可能に構成される。
入力部106は、M個の人体各々から検出されたキーポイントの特徴量を統合する手法を指定するユーザ入力を受付ける。入力部106は、タッチパネル、キーボード、マウス、物理ボタン、マイク、ジェスチャー入力装置等のあらゆる入力装置を介して、上記ユーザ入力を受付けることができる。
処理部103は、ユーザ入力で指定された手法で、キーポイント毎にM個の人体各々から検出された特徴量を統合して、N個のキーポイント各々の統合特徴量を算出する。
入力部106及び処理部103は、以下の処理例1及び2のいずれかを実行することができる。
-処理例1-
当該例では、入力部106は、M個の人体の各々に対して、特徴量を採用するキーポイントを指定する入力を行う。これは、キーポイント毎に、いずれの人体から検出されたキーポイントの特徴量を採用するかを指定する入力と同義である。そして、処理部103は、第1のキーポイントの統合特徴量として、ユーザ入力で指定された人体から検出された第1のキーポイントの特徴量を決定する。
当該例では、入力部106は、M個の人体の各々に対して、特徴量を採用するキーポイントを指定する入力を行う。これは、キーポイント毎に、いずれの人体から検出されたキーポイントの特徴量を採用するかを指定する入力と同義である。そして、処理部103は、第1のキーポイントの統合特徴量として、ユーザ入力で指定された人体から検出された第1のキーポイントの特徴量を決定する。
当該ユーザ入力を受付ける手段は様々である。例えば、入力部106は、図22に示すように、N個のキーポイント各々に対応するN個のオブジェクトRを人体の対応する骨格位置に配置した人体モデルを表示し、算出された特徴量を採用するキーポイントに対応するオブジェクト、又は採用しないキーポイントに対応するオブジェクトを選択するユーザ入力を、M個の人体各々に対応して受付けてもよい。
その他、入力部106は、頭、首、右肩1、左肩、右肘、左肘、右手、左手、右腰、左腰、右膝、左膝、右足、左足等の複数のキーポイント各々に対応する身体の部位の名称を表示し、その中から、算出された特徴量を採用するキーポイント、又は採用しないキーポイントを選択するユーザ入力を、M個の人体各々に対応して受付けてもよい。この場合、チェックボックス等のUI(user interface)部品を使用してもよい。
その他、入力部106は、図23に示すように、N個のキーポイント各々に対応するN個のオブジェクトRを人体の対応する骨格位置に配置した人体モデルを表示し、当該人体モデルにおいて身体の少なくとも一部分を選択するユーザ入力を受付けてもよい。そして、入力部106は、ユーザ入力で選択された身体の部分に存在するキーポイントを、算出された特徴量を採用するキーポイント又は算出された特徴量を採用しないキーポイントとして決定してもよい。図23に示す例では、枠Wにより、身体の少なくとも一部分が選択されている。ユーザは、枠Wの位置や大きさを変更し、所望のキーポイントが枠Wの中に含まれるように調整する。
その他、入力部106は、上半身、下半身、右半身、左半身等の身体の一部分の名称を表示し、その中から少なくとも1つを選択するユーザ入力を受付けてもよい。そして、入力部106は、ユーザ入力で選択された身体の部分に存在するキーポイントを、算出された特徴量を採用するキーポイント又は算出された特徴量を採用しないキーポイントとして決定してもよい。この場合、チェックボックス等のUI(user interface)部品を使用してもよい。
-処理例2-
当該例では、入力部106は、M個の人体の各々に対して、キーポイント毎に、M個の人体各々から算出された特徴量の重みを指定するユーザ入力を受付ける。そして、処理部103は、キーポイント各々の統合特徴量として、M個の人体各々から算出された特徴量の上記ユーザが指定した重みに応じた重み付け平均値を算出する。
当該例では、入力部106は、M個の人体の各々に対して、キーポイント毎に、M個の人体各々から算出された特徴量の重みを指定するユーザ入力を受付ける。そして、処理部103は、キーポイント各々の統合特徴量として、M個の人体各々から算出された特徴量の上記ユーザが指定した重みに応じた重み付け平均値を算出する。
キーポイント毎に重みを指定する手法は様々である。例えば、入力部106は、処理例1で説明した手法でキーポイントを個別に指定する入力を受付けた後、指定したキーポイントの重みを指定する入力をさらに受付けてもよい。その他、入力部106は、処理例1で説明した手法で身体の一部を指定する入力を受付けた後、指定した身体の一部に含まれるすべてのキーポイントに共通する重みを指定する入力をさらに受付けてもよい。
次に、図24のフローチャートを用いて、画像処理装置100の処理の流れの一例を説明する。なお、各ステップの処理順は、適宜変更可能である。
まず、画像処理装置100は、少なくとも1つの画像を取得する(S30)。次いで、画像処理装置100は、M(Mは2以上の整数)個の人体各々から検出されたキーポイントの特徴量を統合する手法を指定するユーザ入力を受付ける(S31)。
次いで、画像処理装置100は、取得した少なく1つの画像に含まれるM個の人体各々からN個のキーポイントを検出する処理を行う(S32)。各人体からは、N個すべてのキーポイントが検出される場合もあれば、N個のキーポイントの一部のみが検出される場合もある。
次いで、画像処理装置100は、人体毎に、検出されたキーポイントの特徴量を算出する(S33)。次いで、画像処理装置100は、S31で指定された手法で、M個の人体各々から検出されたキーポイントの特徴量を統合して、N個のキーポイント各々の統合特徴量を算出する(S34)。次いで、画像処理装置100は、S34で算出された統合特徴量に基づき画像検索又は画像分類を行う(S35)。
本実施形態の画像処理装置100のその他の構成は、第1の実施形態と同様である。
本実施形態の画像処理装置100によれば、第1の実施形態と同様の作用効果が実現される。また、ユーザが統合の仕方を指定できるので、ユーザが望む統合特徴量を算出できるようになる。
<第3の実施形態>
本実施形態の画像処理装置100は、統合特徴量が算出されているキーポイントと、統合特徴量が算出されてないキーポイントとを識別する情報を出力する機能を有する。以下、詳細に説明する。
本実施形態の画像処理装置100は、統合特徴量が算出されているキーポイントと、統合特徴量が算出されてないキーポイントとを識別する情報を出力する機能を有する。以下、詳細に説明する。
図25に、本実施形態の画像処理装置100の機能ブロック図の一例を示す。図示する画像処理装置100は、骨格構造検出部101と、特徴量算出部102と、処理部103と、記憶部104と、表示部105とを有する。
図26に、本実施形態の画像処理装置100の機能ブロック図の他の一例を示す。図示する画像処理装置100は、骨格構造検出部101と、特徴量算出部102と、処理部103と、記憶部104と、表示部105と、入力部106とを有する。
なお、画像処理装置100は、記憶部104を有さなくてもよい。この場合、外部装置が記憶部104を備える。そして、記憶部104は、画像処理装置100からアクセス可能に構成される。
表示部105は、ユーザが指定したM個の人体のいずれからも検出されず、統合特徴量が算出されていないキーポイントと、M個の人体の少なくとも1つから検出され、統合特徴量が算出されたキーポイントとを識別する情報を表示する。
例えば、表示部105は、図27に示すように、N個のキーポイント各々に対応するN個のオブジェクトRを人体の対応する骨格位置に配置した人体モデルを表示し、統合特徴量が算出されていないキーポイントに対応するオブジェクトと、M個の人体の少なくとも1つから検出され、統合特徴量が算出されたキーポイントに対応するオブジェクトを識別可能に表示してもよい。識別可能に表示する手法は、図27に示すようにオブジェクトを塗りつぶすか否かで実現してもよいが、これに限定されない。その他の手法として、例えば、オブジェクトの色を異ならせる、オブジェクトの形を異ならせる、統合特徴量が算出されているキーポイント又は統合特徴量が算出されていないキーポイントに対応するオブジェクトを点滅等で強調表示する等が例示される。
なお、表示部105は、ユーザが指定したM個の人体各々に紐付けて、各々から検出されたキーポイントと、検出されなかったキーポイントとを識別する情報をさらに表示してもよい。すなわち、表示部105は、キーポイントが検出された部位と、キーポイントが検出されなかった部位とを識別する情報をさらに表示してもよい。当該表示は、図27を用いて説明した手法と同様の手法で実現できる。
本実施形態の画像処理装置100のその他の構成は、第1及び第2の実施形態と同様である。
本実施形態の画像処理装置100によれば、第1及び第2の実施形態と同様の作用効果が実現される。また、本実施形態の画像処理装置100によれば、ユーザは、表示部105により表示された情報に基づき、指定したM個の人体でN個のキーポイントの中のいずれがカバーされているかを、容易に把握できる。また、図27のような画像を用いることで、ユーザは直感的に上記内容を把握できる。結果、ユーザは、N個全てのキーポイントの統合特徴量を生成するためにどのような人体を追加すべきかを把握できる。
以上、図面を参照して本発明の実施形態について述べたが、これらは本発明の例示であり、上記以外の様々な構成を採用することもできる。上述した実施形態の構成は、互いに組み合わせたり、一部の構成を他の構成に入れ替えたりしてもよい。また、上述した実施形態の構成は、趣旨を逸脱しない範囲内において種々の変更を加えてもよい。また、上述した各実施形態や変形例に開示される構成や処理を互いに組み合わせてもよい。
また、上述の説明で用いた複数のフローチャートでは、複数の工程(処理)が順番に記載されているが、各実施の形態で実行される工程の実行順序は、その記載の順番に制限されない。各実施の形態では、図示される工程の順番を内容的に支障のない範囲で変更することができる。また、上述の各実施の形態は、内容が相反しない範囲で組み合わせることができる。
上記の実施の形態の一部または全部は、以下の付記のようにも記載されうるが、以下に限られない。
1. 画像に含まれる人体の複数の部位各々に対応する複数のキーポイントを検出する処理を行う骨格構造検出手段と、
検出された前記キーポイント各々の特徴量を算出する特徴量算出手段と、
前記部位ごとに複数の人体各々から検出された前記特徴量を統合して、前記部位ごとの統合特徴量を算出し、前記統合特徴量に基づき画像検索又は画像分類を行う処理手段と、
を有し、
前記処理手段は、
複数の前記人体の中の一部から前記複数の部位のうち第1の部位に対応する前記キーポイントが検出されておらず、複数の前記人体の中の他の一部から前記第1の部位に対応する前記キーポイントが検出されている場合、前記他の一部から検出された前記第1の部位に対応する前記キーポイントの前記特徴量に基づき、前記第1の部位の前記統合特徴量を算出する画像処理装置。
2. 前記処理手段は、
複数の前記人体の中の1つから前記第1の部位に対応する前記キーポイントが検出されている場合、前記1つの人体から検出された前記第1の部位に対応する前記キーポイントの前記特徴量を、前記第1の部位の前記統合特徴量とする1に記載の画像処理装置。
3. 前記処理手段は、
複数の前記人体の中の複数から前記第1の部位に対応する前記キーポイントが検出されている場合、複数の前記人体から検出された前記第1の部位に対応する前記キーポイントの前記特徴量の統計値を、前記第1の部位の前記統合特徴量とする1又は2に記載の画像処理装置。
4. 前記処理手段は、
複数の前記人体の中の複数から前記第1の部位に対応する前記キーポイントが検出されている場合、複数の前記人体から検出された前記第1の部位に対応する前記キーポイントの前記特徴量の中の確信度が最も高い前記特徴量を、前記第1の部位の前記統合特徴量とする1又は2に記載の画像処理装置。
5. 前記処理手段は、
複数の前記人体の中の複数から前記第1の部位に対応する前記キーポイントが検出されている場合、複数の前記人体各々から検出された前記第1の部位に対応する前記キーポイントの前記特徴量の確信度に応じた前記第1の部位に対応する前記キーポイントの前記特徴量の重み付け平均値を、前記第1の部位の前記統合特徴量とする1又は2に記載の画像処理装置。
6. 複数の前記人体のいずれからも前記キーポイントが検出されず、前記統合特徴量が算出されていない前記部位と、複数の前記人体の少なくとも1つから前記キーポイントが検出され、前記統合特徴量が算出された前記部位とを識別する情報を表示する表示手段をさらに有する1から5のいずれかに記載の画像処理装置。
7. 前記表示手段は、
複数のオブジェクトを人体の前記部位に配置した人体モデルを表示するとともに、前記統合特徴量が算出された前記部位に対応する前記オブジェクトと、前記統合特徴量が算出されていない前記部位に対応する前記オブジェクトとを互いに識別可能に表示する6に記載の画像処理装置。
8. 前記表示手段は、
複数の前記人体各々に紐付けて、前記キーポイントが検出された前記部位と、前記キーポイントが検出されなかった前記部位とを識別する情報をさらに表示する6又は7に記載の画像処理装置。
9. コンピュータが、
画像に含まれる人体の複数の部位各々に対応する複数のキーポイントを検出する処理を行う骨格構造検出工程と、
検出された前記キーポイント各々の特徴量を算出する特徴量算出工程と、
前記部位ごとに複数の人体各々から検出された前記特徴量を統合して、前記部位ごとの統合特徴量を算出し、前記統合特徴量に基づき画像検索又は画像分類を行う処理工程と、
を実行し、
前記処理工程では、
複数の前記人体の中の一部から前記複数の部位のうち第1の部位に対応する前記キーポイントが検出されておらず、複数の前記人体の中の他の一部から前記第1の部位に対応する前記キーポイントが検出されている場合、前記他の一部から検出された前記第1の部位に対応する前記キーポイントの前記特徴量に基づき、前記第1の部位の前記統合特徴量を算出する画像処理方法。
10. コンピュータを、
画像に含まれる人体の複数の部位各々に対応する複数のキーポイントを検出する処理を行う骨格構造検出手段、
検出された前記キーポイント各々の特徴量を算出する特徴量算出手段、
前記部位ごとに複数の人体各々から検出された前記特徴量を統合して、前記部位ごとの統合特徴量を算出し、前記統合特徴量に基づき画像検索又は画像分類を行う処理手段、
として機能させ、
前記処理手段は、
複数の前記人体の中の一部から前記複数の部位のうち第1の部位に対応する前記キーポイントが検出されておらず、複数の前記人体の中の他の一部から前記第1の部位に対応する前記キーポイントが検出されている場合、前記他の一部から検出された前記第1の部位に対応する前記キーポイントの前記特徴量に基づき、前記第1の部位の前記統合特徴量を算出するプログラム。
1. 画像に含まれる人体の複数の部位各々に対応する複数のキーポイントを検出する処理を行う骨格構造検出手段と、
検出された前記キーポイント各々の特徴量を算出する特徴量算出手段と、
前記部位ごとに複数の人体各々から検出された前記特徴量を統合して、前記部位ごとの統合特徴量を算出し、前記統合特徴量に基づき画像検索又は画像分類を行う処理手段と、
を有し、
前記処理手段は、
複数の前記人体の中の一部から前記複数の部位のうち第1の部位に対応する前記キーポイントが検出されておらず、複数の前記人体の中の他の一部から前記第1の部位に対応する前記キーポイントが検出されている場合、前記他の一部から検出された前記第1の部位に対応する前記キーポイントの前記特徴量に基づき、前記第1の部位の前記統合特徴量を算出する画像処理装置。
2. 前記処理手段は、
複数の前記人体の中の1つから前記第1の部位に対応する前記キーポイントが検出されている場合、前記1つの人体から検出された前記第1の部位に対応する前記キーポイントの前記特徴量を、前記第1の部位の前記統合特徴量とする1に記載の画像処理装置。
3. 前記処理手段は、
複数の前記人体の中の複数から前記第1の部位に対応する前記キーポイントが検出されている場合、複数の前記人体から検出された前記第1の部位に対応する前記キーポイントの前記特徴量の統計値を、前記第1の部位の前記統合特徴量とする1又は2に記載の画像処理装置。
4. 前記処理手段は、
複数の前記人体の中の複数から前記第1の部位に対応する前記キーポイントが検出されている場合、複数の前記人体から検出された前記第1の部位に対応する前記キーポイントの前記特徴量の中の確信度が最も高い前記特徴量を、前記第1の部位の前記統合特徴量とする1又は2に記載の画像処理装置。
5. 前記処理手段は、
複数の前記人体の中の複数から前記第1の部位に対応する前記キーポイントが検出されている場合、複数の前記人体各々から検出された前記第1の部位に対応する前記キーポイントの前記特徴量の確信度に応じた前記第1の部位に対応する前記キーポイントの前記特徴量の重み付け平均値を、前記第1の部位の前記統合特徴量とする1又は2に記載の画像処理装置。
6. 複数の前記人体のいずれからも前記キーポイントが検出されず、前記統合特徴量が算出されていない前記部位と、複数の前記人体の少なくとも1つから前記キーポイントが検出され、前記統合特徴量が算出された前記部位とを識別する情報を表示する表示手段をさらに有する1から5のいずれかに記載の画像処理装置。
7. 前記表示手段は、
複数のオブジェクトを人体の前記部位に配置した人体モデルを表示するとともに、前記統合特徴量が算出された前記部位に対応する前記オブジェクトと、前記統合特徴量が算出されていない前記部位に対応する前記オブジェクトとを互いに識別可能に表示する6に記載の画像処理装置。
8. 前記表示手段は、
複数の前記人体各々に紐付けて、前記キーポイントが検出された前記部位と、前記キーポイントが検出されなかった前記部位とを識別する情報をさらに表示する6又は7に記載の画像処理装置。
9. コンピュータが、
画像に含まれる人体の複数の部位各々に対応する複数のキーポイントを検出する処理を行う骨格構造検出工程と、
検出された前記キーポイント各々の特徴量を算出する特徴量算出工程と、
前記部位ごとに複数の人体各々から検出された前記特徴量を統合して、前記部位ごとの統合特徴量を算出し、前記統合特徴量に基づき画像検索又は画像分類を行う処理工程と、
を実行し、
前記処理工程では、
複数の前記人体の中の一部から前記複数の部位のうち第1の部位に対応する前記キーポイントが検出されておらず、複数の前記人体の中の他の一部から前記第1の部位に対応する前記キーポイントが検出されている場合、前記他の一部から検出された前記第1の部位に対応する前記キーポイントの前記特徴量に基づき、前記第1の部位の前記統合特徴量を算出する画像処理方法。
10. コンピュータを、
画像に含まれる人体の複数の部位各々に対応する複数のキーポイントを検出する処理を行う骨格構造検出手段、
検出された前記キーポイント各々の特徴量を算出する特徴量算出手段、
前記部位ごとに複数の人体各々から検出された前記特徴量を統合して、前記部位ごとの統合特徴量を算出し、前記統合特徴量に基づき画像検索又は画像分類を行う処理手段、
として機能させ、
前記処理手段は、
複数の前記人体の中の一部から前記複数の部位のうち第1の部位に対応する前記キーポイントが検出されておらず、複数の前記人体の中の他の一部から前記第1の部位に対応する前記キーポイントが検出されている場合、前記他の一部から検出された前記第1の部位に対応する前記キーポイントの前記特徴量に基づき、前記第1の部位の前記統合特徴量を算出するプログラム。
100 画像処理装置
101 骨格構造検出部
102 特徴量算出部
103 処理部
104 記憶部
105 表示部
106 入力部
1A プロセッサ
2A メモリ
3A 入出力I/F
4A 周辺回路
5A バス
101 骨格構造検出部
102 特徴量算出部
103 処理部
104 記憶部
105 表示部
106 入力部
1A プロセッサ
2A メモリ
3A 入出力I/F
4A 周辺回路
5A バス
Claims (10)
- 画像に含まれる人体の複数の部位各々に対応する複数のキーポイントを検出する処理を行う骨格構造検出手段と、
検出された前記キーポイント各々の特徴量を算出する特徴量算出手段と、
前記部位ごとに複数の人体各々から検出された前記特徴量を統合して、前記部位ごとの統合特徴量を算出し、前記統合特徴量に基づき画像検索又は画像分類を行う処理手段と、
を有し、
前記処理手段は、
複数の前記人体の中の一部から前記複数の部位のうち第1の部位に対応する前記キーポイントが検出されておらず、複数の前記人体の中の他の一部から前記第1の部位に対応する前記キーポイントが検出されている場合、前記他の一部から検出された前記第1の部位に対応する前記キーポイントの前記特徴量に基づき、前記第1の部位の前記統合特徴量を算出する画像処理装置。 - 前記処理手段は、
複数の前記人体の中の1つから前記第1の部位に対応する前記キーポイントが検出されている場合、前記1つの人体から検出された前記第1の部位に対応する前記キーポイントの前記特徴量を、前記第1の部位の前記統合特徴量とする請求項1に記載の画像処理装置。 - 前記処理手段は、
複数の前記人体の中の複数から前記第1の部位に対応する前記キーポイントが検出されている場合、複数の前記人体から検出された前記第1の部位に対応する前記キーポイントの前記特徴量の統計値を、前記第1の部位の前記統合特徴量とする請求項1又は2に記載の画像処理装置。 - 前記処理手段は、
複数の前記人体の中の複数から前記第1の部位に対応する前記キーポイントが検出されている場合、複数の前記人体から検出された前記第1の部位に対応する前記キーポイントの前記特徴量の中の確信度が最も高い前記特徴量を、前記第1の部位の前記統合特徴量とする請求項1又は2に記載の画像処理装置。 - 前記処理手段は、
複数の前記人体の中の複数から前記第1の部位に対応する前記キーポイントが検出されている場合、複数の前記人体各々から検出された前記第1の部位に対応する前記キーポイントの前記特徴量の確信度に応じた前記第1の部位に対応する前記キーポイントの前記特徴量の重み付け平均値を、前記第1の部位の前記統合特徴量とする請求項1又は2に記載の画像処理装置。 - 複数の前記人体のいずれからも前記キーポイントが検出されず、前記統合特徴量が算出されていない前記部位と、複数の前記人体の少なくとも1つから前記キーポイントが検出され、前記統合特徴量が算出された前記部位とを識別する情報を表示する表示手段をさらに有する請求項1から5のいずれか1項に記載の画像処理装置。
- 前記表示手段は、
複数のオブジェクトを人体の前記部位に配置した人体モデルを表示するとともに、前記統合特徴量が算出された前記部位に対応する前記オブジェクトと、前記統合特徴量が算出されていない前記部位に対応する前記オブジェクトとを互いに識別可能に表示する請求項6に記載の画像処理装置。 - 前記表示手段は、
複数の前記人体各々に紐付けて、前記キーポイントが検出された前記部位と、前記キーポイントが検出されなかった前記部位とを識別する情報をさらに表示する請求項6又は7に記載の画像処理装置。 - コンピュータが、
画像に含まれる人体の複数の部位各々に対応する複数のキーポイントを検出する処理を行う骨格構造検出工程と、
検出された前記キーポイント各々の特徴量を算出する特徴量算出工程と、
前記部位ごとに複数の人体各々から検出された前記特徴量を統合して、前記部位ごとの統合特徴量を算出し、前記統合特徴量に基づき画像検索又は画像分類を行う処理工程と、
を実行し、
前記処理工程では、
複数の前記人体の中の一部から前記複数の部位のうち第1の部位に対応する前記キーポイントが検出されておらず、複数の前記人体の中の他の一部から前記第1の部位に対応する前記キーポイントが検出されている場合、前記他の一部から検出された前記第1の部位に対応する前記キーポイントの前記特徴量に基づき、前記第1の部位の前記統合特徴量を算出する画像処理方法。 - コンピュータを、
画像に含まれる人体の複数の部位各々に対応する複数のキーポイントを検出する処理を行う骨格構造検出手段、
検出された前記キーポイント各々の特徴量を算出する特徴量算出手段、
前記部位ごとに複数の人体各々から検出された前記特徴量を統合して、前記部位ごとの統合特徴量を算出し、前記統合特徴量に基づき画像検索又は画像分類を行う処理手段、
として機能させ、
前記処理手段は、
複数の前記人体の中の一部から前記複数の部位のうち第1の部位に対応する前記キーポイントが検出されておらず、複数の前記人体の中の他の一部から前記第1の部位に対応する前記キーポイントが検出されている場合、前記他の一部から検出された前記第1の部位に対応する前記キーポイントの前記特徴量に基づき、前記第1の部位の前記統合特徴量を算出するプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/041924 WO2023084778A1 (ja) | 2021-11-15 | 2021-11-15 | 画像処理装置、画像処理方法、およびプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/041924 WO2023084778A1 (ja) | 2021-11-15 | 2021-11-15 | 画像処理装置、画像処理方法、およびプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023084778A1 true WO2023084778A1 (ja) | 2023-05-19 |
Family
ID=86335469
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/041924 WO2023084778A1 (ja) | 2021-11-15 | 2021-11-15 | 画像処理装置、画像処理方法、およびプログラム |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2023084778A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016058078A (ja) * | 2014-09-05 | 2016-04-21 | ザ・ボーイング・カンパニーThe Boeing Company | 連想メモリによって分類されたフレームを使用して位置に対する計量値を取得すること |
| CN109308438A (zh) * | 2017-07-28 | 2019-02-05 | 上海形趣信息科技有限公司 | 动作识别库的建立方法、电子设备、存储介质 |
| JP2019091138A (ja) * | 2017-11-13 | 2019-06-13 | 株式会社日立製作所 | 画像検索装置、画像検索方法、及び、それに用いる設定画面 |
| JP2020135747A (ja) * | 2019-02-25 | 2020-08-31 | 株式会社日立ソリューションズ | 行動分析装置および行動分析方法 |
| JP2020135551A (ja) * | 2019-02-21 | 2020-08-31 | セコム株式会社 | 対象物認識装置、対象物認識方法、及び対象物認識プログラム |
-
2021
- 2021-11-15 WO PCT/JP2021/041924 patent/WO2023084778A1/ja unknown
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016058078A (ja) * | 2014-09-05 | 2016-04-21 | ザ・ボーイング・カンパニーThe Boeing Company | 連想メモリによって分類されたフレームを使用して位置に対する計量値を取得すること |
| CN109308438A (zh) * | 2017-07-28 | 2019-02-05 | 上海形趣信息科技有限公司 | 动作识别库的建立方法、电子设备、存储介质 |
| JP2019091138A (ja) * | 2017-11-13 | 2019-06-13 | 株式会社日立製作所 | 画像検索装置、画像検索方法、及び、それに用いる設定画面 |
| JP2020135551A (ja) * | 2019-02-21 | 2020-08-31 | セコム株式会社 | 対象物認識装置、対象物認識方法、及び対象物認識プログラム |
| JP2020135747A (ja) * | 2019-02-25 | 2020-08-31 | 株式会社日立ソリューションズ | 行動分析装置および行動分析方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7416252B2 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| CN114616588A (zh) | 图像处理装置、图像处理方法以及存储图像处理程序的非暂时性计算机可读介质 | |
| CN106030610A (zh) | 移动设备的实时3d姿势识别和跟踪系统 | |
| JP7409499B2 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| US20230410361A1 (en) | Image processing system, processing method, and non-transitory storage medium | |
| WO2021229751A1 (ja) | 画像選択装置、画像選択方法、およびプログラム | |
| WO2023084778A1 (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| WO2023084780A1 (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| JP7435781B2 (ja) | 画像選択装置、画像選択方法、及びプログラム | |
| WO2022079794A1 (ja) | 画像選択装置、画像選択方法、及びプログラム | |
| Gallo et al. | View-independent hand posture recognition from single depth images using PCA and Flusser moments | |
| WO2022009279A1 (ja) | 画像選択装置、画像選択方法、及びプログラム | |
| JP7364077B2 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| WO2023152977A1 (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| JP7468642B2 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| WO2023089690A1 (ja) | 検索装置、検索方法、およびプログラム | |
| WO2023152971A1 (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| WO2022003854A1 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| WO2023152974A1 (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| JP7485040B2 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| WO2023152973A1 (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| WO2023089691A1 (ja) | 行動分類装置、行動分類方法、およびプログラム | |
| WO2022249278A1 (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| JP7375921B2 (ja) | 画像分類装置、画像分類方法、およびプログラム | |
| JP7302741B2 (ja) | 画像選択装置、画像選択方法、およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21964131 Country of ref document: EP Kind code of ref document: A1 |