JP7435781B2 - 画像選択装置、画像選択方法、及びプログラム - Google Patents
画像選択装置、画像選択方法、及びプログラム Download PDFInfo
- Publication number
- JP7435781B2 JP7435781B2 JP2022534551A JP2022534551A JP7435781B2 JP 7435781 B2 JP7435781 B2 JP 7435781B2 JP 2022534551 A JP2022534551 A JP 2022534551A JP 2022534551 A JP2022534551 A JP 2022534551A JP 7435781 B2 JP7435781 B2 JP 7435781B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- person
- image selection
- key points
- missing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000010187 selection method Methods 0.000 title claims description 18
- 238000000034 method Methods 0.000 claims description 105
- 238000012545 processing Methods 0.000 claims description 102
- 238000004364 calculation method Methods 0.000 claims description 72
- 238000012937 correction Methods 0.000 claims description 52
- 230000008569 process Effects 0.000 claims description 48
- 210000000988 bone and bone Anatomy 0.000 description 157
- 230000036544 posture Effects 0.000 description 125
- 238000010586 diagram Methods 0.000 description 44
- 238000001514 detection method Methods 0.000 description 29
- 230000006870 function Effects 0.000 description 17
- 238000010606 normalization Methods 0.000 description 15
- 210000002414 leg Anatomy 0.000 description 14
- 238000010801 machine learning Methods 0.000 description 11
- 238000005516 engineering process Methods 0.000 description 9
- 230000006399 behavior Effects 0.000 description 7
- 230000008859 change Effects 0.000 description 7
- 230000004048 modification Effects 0.000 description 7
- 238000012986 modification Methods 0.000 description 7
- 210000003127 knee Anatomy 0.000 description 6
- 230000037237 body shape Effects 0.000 description 5
- 239000000284 extract Substances 0.000 description 4
- 238000003384 imaging method Methods 0.000 description 4
- 238000012544 monitoring process Methods 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 230000001186 cumulative effect Effects 0.000 description 2
- 238000005401 electroluminescence Methods 0.000 description 2
- 238000003672 processing method Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 235000000332 black box Nutrition 0.000 description 1
- 238000007621 cluster analysis Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000013135 deep learning Methods 0.000 description 1
- 238000012217 deletion Methods 0.000 description 1
- 230000037430 deletion Effects 0.000 description 1
- 210000003414 extremity Anatomy 0.000 description 1
- 230000001815 facial effect Effects 0.000 description 1
- 230000014509 gene expression Effects 0.000 description 1
- 210000002411 hand bone Anatomy 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 210000001930 leg bone Anatomy 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000003909 pattern recognition Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images
















































Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/50—Information retrieval; Database structures therefor; File system structures therefor of still image data
- G06F16/53—Querying
- G06F16/532—Query formulation, e.g. graphical querying
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/50—Information retrieval; Database structures therefor; File system structures therefor of still image data
- G06F16/58—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually
- G06F16/583—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually using metadata automatically derived from the content
- G06F16/5854—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually using metadata automatically derived from the content using shape and object relationship
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
- G06T7/74—Determining position or orientation of objects or cameras using feature-based methods involving reference images or patches
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/20—Movements or behaviour, e.g. gesture recognition
- G06V40/23—Recognition of whole body movements, e.g. for sport training
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30196—Human being; Person
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Library & Information Science (AREA)
- Data Mining & Analysis (AREA)
- Databases & Information Systems (AREA)
- General Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Mathematical Physics (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Psychiatry (AREA)
- Social Psychology (AREA)
- Human Computer Interaction (AREA)
- Multimedia (AREA)
- Image Analysis (AREA)
Description
前記クエリ情報を用いて、複数の選択対象画像から少なくとも一つの目的画像を選択する画像選択手段と、
を備え、
前記クエリ情報は、人の身体の互いに異なる部分を示す複数のキーポイントの相対位置を含んでおり、
前記画像選択手段は、
前記選択対象画像に含まれている人の前記キーポイントの相対位置、当該人において欠損している前記キーポイントである欠損キーポイントの種類及び数の少なくとも一方、並びに、前記クエリ情報を用いて、前記少なくとも一つの目的画像を選択する、画像選択装置が提供される。
人の姿勢を示すクエリ情報を取得するクエリ取得処理と、
前記クエリ情報を用いて、複数の選択対象画像から少なくとも一つの目的画像を選択する画像選択処理と、
を行い、
前記クエリ情報は、人の身体の互いに異なる部分を示す複数のキーポイントの相対位置を含んでおり、
前記画像選択処理において、前記コンピュータが、
前記選択対象画像に含まれている人の前記キーポイントの相対位置、当該人において欠損している前記キーポイントである欠損キーポイントの種類及び数の少なくとも一方、並びに、前記クエリ情報を用いて、前記少なくとも一つの目的画像を選択する、画像選択方法が提供される。
前記クエリ情報を用いて、複数の選択対象画像から少なくとも一つの目的画像を選択する画像選択機能と、
を持たせ、
前記クエリ情報は、人の身体の互いに異なる部分を示す複数のキーポイントの相対位置を含んでおり、
前記画像選択機能は、
前記選択対象画像に含まれている人の前記キーポイントの相対位置、当該人において欠損している前記キーポイントである欠損キーポイントの種類及び数の少なくとも一方、並びに、前記クエリ情報を用いて、前記少なくとも一つの目的画像を選択する、プログラムが提供される。
近年、ディープラーニング等の機械学習を活用した画像認識技術が様々なシステムに応用されている。例えば、監視カメラの画像により監視を行う監視システムへの適用が進められている。監視システムに機械学習を活用することで、画像から人物の姿勢や行動等の状態をある程度把握することが可能とされつつある。
図1は、実施の形態に係る画像処理装置10の概要を示している。図1に示すように、画像処理装置10は、骨格検出部11、特徴量算出部12、及び認識部13を備えている。骨格検出部11は、カメラ等から取得される2次元画像に基づいて、複数の人物の2次元骨格構造を検出する。特徴量算出部12は、骨格検出部11により検出された複数の2次元骨格構造の特徴量を算出する。認識部13は、特徴量算出部12により算出された複数の特徴量の類似度に基づいて、複数の人物の状態の認識処理を行う。認識処理は、人物の状態の分類処理や検索処理(選択処理)等である。このため、画像処理装置10は画像選択装置としても機能する。
全身の骨格構造による分類や、上半身や下半身の骨格構造による分類、腕や脚の骨格構造による分類等を階層的に組み合わせて分類する。すなわち、骨格構造の第1の部分や第2の部分の特徴量に基づいて分類し、さらに、第1の部分や第2の部分の特徴量に重みづけを行って分類してもよい。
時系列に連続する複数の画像における骨格構造の特徴量に基づいて分類する。例えば、時系列方向に特徴量を積み重ねて、累積値に基づいて分類してもよい。さらに、連続する複数の画像における骨格構造の特徴量の変化(変化量)に基づいて分類してもよい。
人物の右側と左側が反対の骨格構造を同じ骨格構造として分類する。
人物の高さ方向の特徴量のみを用いて検索することで、人物の横方向の変化の影響を抑えることができ、人物の向きや人物の体型の変化に対しロバスト性が向上する。例えば、図13の骨格構造501~503のように、人物の向きや体型が異なる場合でも、高さ方向の特徴量は大きく変化しない。このため、骨格構造501~503では、検索時(分類時)に同じ姿勢であると判断することができる。
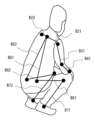
人物の右側と左側が反対の骨格構造を同じ骨格構造として検索する。例えば、図16の骨格構造531及び532のように、右手を挙げている姿勢と、左手を挙げている姿勢を同じ姿勢として検索(分類)できる。図16の例では、骨格構造531と骨格構造532は、右手のキーポイントA51、右肘のキーポイントA41、左手のキーポイントA52、左肘のキーポイントA42の位置が異なるものの、その他のキーポイントの位置は同じである。骨格構造531の右手のキーポイントA51及び右肘のキーポイントA41と骨格構造532の左手のキーポイントA52及び左肘のキーポイントA42のうち、一方の骨格構造のキーポイントを左右反転させると、他方の骨格構造のキーポイントと同じ位置となり、また、骨格構造531の左手のキーポイントA52及び左肘のキーポイントA42と骨格構造532の右手のキーポイントA51及び右肘のキーポイントA41のうち、一方の骨格構造のキーポイントを左右反転させると、他方の骨格構造のキーポイントと同じ位置となるため、同じ姿勢と判断する。
人物の縦方向(Y軸方向)の特徴量のみで検索を行った後、得られた結果をさらに人物の横方向(X軸方向)の特徴量を用いて検索する。
時系列に連続する複数の画像における骨格構造の特徴量に基づいて検索する。例えば、時系列方向に特徴量を積み重ねて、累積値に基づいて検索してもよい。さらに、連続する複数の画像における骨格構造の特徴量の変化(変化量)に基づいて検索してもよい。

1.人の姿勢を示すクエリ情報を取得するクエリ取得手段と、
前記クエリ情報を用いて、複数の選択対象画像から少なくとも一つの目的画像を選択する画像選択手段と、
を備え、
前記クエリ情報は、人の身体の互いに異なる部分を示す複数のキーポイントの相対位置を含んでおり、
前記画像選択手段は、
前記選択対象画像に含まれている人の前記キーポイントの相対位置、当該人において欠損している前記キーポイントである欠損キーポイントの種類及び数の少なくとも一方、並びに、前記クエリ情報を用いて、前記少なくとも一つの目的画像を選択する、画像選択装置。
2.上記1に記載の画像選択装置において、
前記画像選択手段は、
前記選択対象画像の前記キーポイントの相対位置と、前記クエリ情報の前記キーポイントの相対位置と、を用いて前記クエリ情報に対する前記選択対象画像のスコアを算出し、
前記欠損キーポイントの種類及び数の少なくとも一方を用いて、前記スコアを変更し、
変更後の前記スコアを用いて、前記目的画像を選択する画像選択装置。
3.上記2に記載の画像選択装置において、
前記画像選択手段は、
前記欠損キーポイントの数及び前記欠損キーポイントに対して定められた値である基準値を用いて修正量を算出し、当該修正量を用いて前記スコアを変更する、画像選択装置。
4.上記3に記載の画像選択装置において、
前記画像選択手段は、
外部又はユーザからの入力に従って、前記基準値又は前記修正量に加える演算処理の内容を決定し、
前記演算処理が前記基準値に対して行われる場合は、前記演算処理後の前記基準値を用いて前記修正量を算出し、
前記演算処理が前記修正量に対して行われる場合は、前記演算処理後の前記修正量を用いて前記スコアを変更する、画像選択装置。
5.上記3又は4に記載の画像選択装置において、
前記画像選択手段は、
前記複数のキーポイントの基準相対位置を含む基準姿勢情報と、前記クエリ情報との差分を用いて、少なくとも一つの前記キーポイントの重み付けを決定し、
前記欠損キーポイントのそれぞれに対応する前記基準値を、当該欠損キーポイントに対応する前記重み付けを用いて変更する、画像選択装置。
6.上記5に記載の画像選択装置において、
前記基準姿勢情報は、人が直立し、かつ両手を体に沿って下げたときの前記複数のキーポイントの相対位置を示す画像選択装置。
7.上記5に記載の画像選択装置において、
前記画像選択手段は、複数の選択対象画像を処理することにより、前記基準姿勢情報を生成する画像選択装置。
8.上記3又は4に記載の画像選択装置において、
前記画像選択手段は、
外部又はユーザからの入力に基づいて、少なくとも一つの前記キーポイントの重み付けを示す重み付け情報を取得し、
前記欠損キーポイントのそれぞれに対応する前記基準値を、当該欠損キーポイントに対応する前記重み付けを用いて変更する、画像選択装置。
9.コンピュータが、
人の姿勢を示すクエリ情報を取得するクエリ取得処理と、
前記クエリ情報を用いて、複数の選択対象画像から少なくとも一つの目的画像を選択する画像選択処理と、
を行い、
前記クエリ情報は、人の身体の互いに異なる部分を示す複数のキーポイントの相対位置を含んでおり、
前記画像選択処理において、前記コンピュータが、
前記選択対象画像に含まれている人の前記キーポイントの相対位置、当該人において欠損している前記キーポイントである欠損キーポイントの種類及び数の少なくとも一方、並びに、前記クエリ情報を用いて、前記少なくとも一つの目的画像を選択する、画像選択方法。
10.上記8に記載の画像選択方法において、
前記画像選択処理において、前記コンピュータは、
前記選択対象画像の前記キーポイントの相対位置と、前記クエリ情報の前記キーポイントの相対位置と、を用いて前記クエリ情報に対する前記選択対象画像のスコアを算出し、
前記欠損キーポイントの種類及び数の少なくとも一方を用いて、前記スコアを変更し、
変更後の前記スコアを用いて、前記目的画像を選択する画像選択方法。
11.上記10に記載の画像選択方法において、
前記画像選択処理において、前記コンピュータは、
前記欠損キーポイントの数及び前記欠損キーポイントに対して定められた値である基準値を用いて修正量を算出し、当該修正量を用いて前記スコアを変更する、画像選択方法。
12.上記11に記載の画像選択方法において、
前記画像選択処理において、前記コンピュータは、
外部又はユーザからの入力に従って、前記基準値又は前記修正量に加える演算処理の内容を決定し、
前記演算処理が前記基準値に対して行われる場合は、前記演算処理後の前記基準値を用いて前記修正量を算出し、
前記演算処理が前記修正量に対して行われる場合は、前記演算処理後の前記修正量を用いて前記スコアを変更する、画像選択方法。
13.上記11又は12に記載の画像選択方法において、
前記画像選択処理において、前記コンピュータは、
前記複数のキーポイントの基準相対位置を含む基準姿勢情報と、前記クエリ情報との差分を用いて、少なくとも一つの前記キーポイントの重み付けを決定し、
前記欠損キーポイントのそれぞれに対応する前記基準値を、当該欠損キーポイントに対応する前記重み付けを用いて変更する、画像選択方法。
14.上記13に記載の画像選択方法において、
前記基準姿勢情報は、人が直立し、かつ両手を体に沿って下げたときの前記複数のキーポイントの相対位置を示す画像選択方法。
15.上記13に記載の画像選択方法において、
前記画像選択処理において、前記コンピュータは、複数の選択対象画像を処理することにより、前記基準姿勢情報を生成する画像選択方法。
16.上記11又は12に記載の画像選択方法において、
前記画像選択処理において、前記コンピュータは、
外部又はユーザからの入力に基づいて、少なくとも一つの前記キーポイントの重み付けを示す重み付け情報を取得し、
前記欠損キーポイントのそれぞれに対応する前記基準値を、当該欠損キーポイントに対応する前記重み付けを用いて変更する、画像選択方法。
17.コンピュータに、
人の姿勢を示すクエリ情報を取得するクエリ取得機能と、
前記クエリ情報を用いて、複数の選択対象画像から少なくとも一つの目的画像を選択する画像選択機能と、
を持たせ、
前記クエリ情報は、人の身体の互いに異なる部分を示す複数のキーポイントの相対位置を含んでおり、
前記画像選択機能は、
前記選択対象画像に含まれている人の前記キーポイントの相対位置、当該人において欠損している前記キーポイントである欠損キーポイントの種類及び数の少なくとも一方、並びに、前記クエリ情報を用いて、前記少なくとも一つの目的画像を選択する、プログラム。
18.上記17に記載のプログラムにおいて、
前記画像選択機能は、
前記選択対象画像の前記キーポイントの相対位置と、前記クエリ情報の前記キーポイントの相対位置と、を用いて前記クエリ情報に対する前記選択対象画像のスコアを算出し、
前記欠損キーポイントの種類及び数の少なくとも一方を用いて、前記スコアを変更し、
変更後の前記スコアを用いて、前記目的画像を選択するプログラム。
19.上記18に記載のプログラムにおいて、
前記画像選択機能は、
前記欠損キーポイントの数及び前記欠損キーポイントに対して定められた値である基準値を用いて修正量を算出し、当該修正量を用いて前記スコアを変更する、プログラム。
20.上記19に記載のプログラムにおいて、
前記画像選択機能は、
外部又はユーザからの入力に従って、前記基準値又は前記修正量に加える演算処理の内容を決定し、
前記演算処理が前記基準値に対して行われる場合は、前記演算処理後の前記基準値を用いて前記修正量を算出し、
前記演算処理が前記修正量に対して行われる場合は、前記演算処理後の前記修正量を用いて前記スコアを変更する、プログラム。
21.上記19又は20に記載のプログラムにおいて、
前記画像選択機能は、
前記複数のキーポイントの基準相対位置を含む基準姿勢情報と、前記クエリ情報との差分を用いて、少なくとも一つの前記キーポイントの重み付けを決定し、
前記欠損キーポイントのそれぞれに対応する前記基準値を、当該欠損キーポイントに対応する前記重み付けを用いて変更する、プログラム。
22.上記21に記載のプログラムにおいて、
前記基準姿勢情報は、人が直立し、かつ両手を体に沿って下げたときの前記複数のキーポイントの相対位置を示すプログラム。
23.上記21に記載のプログラムにおいて、
前記画像選択機能は、複数の選択対象画像を処理することにより、前記基準姿勢情報を生成するプログラム。
24.上記19又は20に記載のプログラムにおいて、
前記画像選択機能は、
外部又はユーザからの入力に基づいて、少なくとも一つの前記キーポイントの重み付けを示す重み付け情報を取得し、
前記欠損キーポイントのそれぞれに対応する前記基準値を、当該欠損キーポイントに対応する前記重み付けを用いて変更する、プログラム。
10 画像処理装置(画像選択装置)
11 骨格検出部
12 特徴量算出部
13 認識部
100 画像処理装置(画像選択装置)
101 画像取得部
102 骨格構造検出部
103 特徴量算出部
104 分類部
105 検索部
106 入力部
107 表示部
108 身長算出部
110 データベース
200 カメラ
300、301 人体モデル
401 2次元骨格構造
402 3次元人体モデル
610 クエリ取得部
620 画像選択部
630 画像記憶部
Claims (10)
- 人の姿勢を示すクエリ情報を取得するクエリ取得手段と、
前記クエリ情報を用いて、複数の選択対象画像から少なくとも一つの目的画像を選択する画像選択手段と、
を備え、
前記クエリ情報は、人の身体の互いに異なる部分を示す複数のキーポイントの相対位置を含んでおり、
前記画像選択手段は、
前記選択対象画像に含まれている人の前記キーポイントの相対位置、当該人において欠損している前記キーポイントである欠損キーポイントの種類及び数の少なくとも一方、並びに、前記クエリ情報を用いて、前記少なくとも一つの目的画像を選択する、画像選択装置。 - 請求項1に記載の画像選択装置において、
前記画像選択手段は、
前記選択対象画像の前記キーポイントの相対位置と、前記クエリ情報の前記キーポイントの相対位置と、を用いて前記クエリ情報に対する前記選択対象画像のスコアを算出し、
前記欠損キーポイントの種類及び数の少なくとも一方を用いて、前記スコアを変更し、
変更後の前記スコアを用いて、前記目的画像を選択する画像選択装置。 - 請求項2に記載の画像選択装置において、
前記画像選択手段は、
前記欠損キーポイントの数及び前記欠損キーポイントに対して定められた値である基準値を用いて修正量を算出し、当該修正量を用いて前記スコアを変更する、画像選択装置。 - 請求項3に記載の画像選択装置において、
前記画像選択手段は、
外部又はユーザからの入力に従って、前記基準値又は前記修正量に加える演算処理の内容を決定し、
前記演算処理が前記基準値に対して行われる場合は、前記演算処理後の前記基準値を用いて前記修正量を算出し、
前記演算処理が前記修正量に対して行われる場合は、前記演算処理後の前記修正量を用いて前記スコアを変更する、画像選択装置。 - 請求項3又は4に記載の画像選択装置において、
前記画像選択手段は、
前記複数のキーポイントの基準相対位置を含む基準姿勢情報と、前記クエリ情報との差分を用いて、少なくとも一つの前記キーポイントの重み付けを決定し、
前記欠損キーポイントのそれぞれに対応する前記基準値を、当該欠損キーポイントに対応する前記重み付けを用いて変更する、画像選択装置。 - 請求項5に記載の画像選択装置において、
前記基準姿勢情報は、人が直立し、かつ両手を体に沿って下げたときの前記複数のキーポイントの相対位置を示す画像選択装置。 - 請求項5に記載の画像選択装置において、
前記画像選択手段は、複数の選択対象画像を処理することにより、前記基準姿勢情報を生成する画像選択装置。 - 請求項3又は4に記載の画像選択装置において、
前記画像選択手段は、
外部又はユーザからの入力に基づいて、少なくとも一つの前記キーポイントの重み付けを示す重み付け情報を取得し、
前記欠損キーポイントのそれぞれに対応する前記基準値を、当該欠損キーポイントに対応する前記重み付けを用いて変更する、画像選択装置。 - コンピュータが、
人の姿勢を示すクエリ情報を取得するクエリ取得処理と、
前記クエリ情報を用いて、複数の選択対象画像から少なくとも一つの目的画像を選択する画像選択処理と、
を行い、
前記クエリ情報は、人の身体の互いに異なる部分を示す複数のキーポイントの相対位置を含んでおり、
前記画像選択処理において、前記コンピュータが、
前記選択対象画像に含まれている人の前記キーポイントの相対位置、当該人において欠損している前記キーポイントである欠損キーポイントの種類及び数の少なくとも一方、並びに、前記クエリ情報を用いて、前記少なくとも一つの目的画像を選択する、画像選択方法。 - コンピュータに、
人の姿勢を示すクエリ情報を取得するクエリ取得機能と、
前記クエリ情報を用いて、複数の選択対象画像から少なくとも一つの目的画像を選択する画像選択機能と、
を持たせ、
前記クエリ情報は、人の身体の互いに異なる部分を示す複数のキーポイントの相対位置を含んでおり、
前記画像選択機能は、
前記選択対象画像に含まれている人の前記キーポイントの相対位置、当該人において欠損している前記キーポイントである欠損キーポイントの種類及び数の少なくとも一方、並びに、前記クエリ情報を用いて、前記少なくとも一つの目的画像を選択する、プログラム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/026663 WO2022009327A1 (ja) | 2020-07-08 | 2020-07-08 | 画像選択装置、画像選択方法、及びプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2022009327A1 JPWO2022009327A1 (ja) | 2022-01-13 |
| JPWO2022009327A5 JPWO2022009327A5 (ja) | 2023-03-10 |
| JP7435781B2 true JP7435781B2 (ja) | 2024-02-21 |
Family
ID=79552439
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022534551A Active JP7435781B2 (ja) | 2020-07-08 | 2020-07-08 | 画像選択装置、画像選択方法、及びプログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20230306054A1 (ja) |
| JP (1) | JP7435781B2 (ja) |
| WO (1) | WO2022009327A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20230101617A1 (en) * | 2021-09-24 | 2023-03-30 | Apple Inc. | Full body pose estimation through feature extraction from multiple wearable devices |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019091138A (ja) | 2017-11-13 | 2019-06-13 | 株式会社日立製作所 | 画像検索装置、画像検索方法、及び、それに用いる設定画面 |
-
2020
- 2020-07-08 US US18/014,408 patent/US20230306054A1/en active Pending
- 2020-07-08 WO PCT/JP2020/026663 patent/WO2022009327A1/ja active Application Filing
- 2020-07-08 JP JP2022534551A patent/JP7435781B2/ja active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019091138A (ja) | 2017-11-13 | 2019-06-13 | 株式会社日立製作所 | 画像検索装置、画像検索方法、及び、それに用いる設定画面 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2022009327A1 (ja) | 2022-01-13 |
| JPWO2022009327A1 (ja) | 2022-01-13 |
| US20230306054A1 (en) | 2023-09-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7556556B2 (ja) | 画像処理装置、画像処理方法及び画像処理プログラム | |
| JP7409499B2 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| JP7416252B2 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| JP2024103572A (ja) | 情報処理装置、情報処理方法、およびプログラム | |
| JP7364077B2 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| JP7435781B2 (ja) | 画像選択装置、画像選択方法、及びプログラム | |
| WO2022079794A1 (ja) | 画像選択装置、画像選択方法、及びプログラム | |
| WO2022009279A1 (ja) | 画像選択装置、画像選択方法、及びプログラム | |
| JP7396364B2 (ja) | 画像処理装置、画像処理方法及び画像処理プログラム | |
| JP7375921B2 (ja) | 画像分類装置、画像分類方法、およびプログラム | |
| JP7435754B2 (ja) | 画像選択装置、画像選択方法、及びプログラム | |
| JP7302741B2 (ja) | 画像選択装置、画像選択方法、およびプログラム | |
| WO2022249278A1 (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| JP7501621B2 (ja) | 画像選択装置、画像選択方法、およびプログラム | |
| WO2022079795A1 (ja) | 画像選択装置、画像選択方法、及びプログラム | |
| JP7485040B2 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| WO2022249331A1 (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| JP7468642B2 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| WO2023152977A1 (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| WO2023152974A1 (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| WO2023112321A1 (ja) | 画像処理システム、画像処理方法及び非一時的なコンピュータ可読媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221228 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240109 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240122 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7435781 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |