WO2023084664A1 - 運転技能評価システム、情報処理装置、車両及びコンピュータプログラム並びにコンピュータプログラムを記録した記録媒体 - Google Patents
運転技能評価システム、情報処理装置、車両及びコンピュータプログラム並びにコンピュータプログラムを記録した記録媒体 Download PDFInfo
- Publication number
- WO2023084664A1 WO2023084664A1 PCT/JP2021/041457 JP2021041457W WO2023084664A1 WO 2023084664 A1 WO2023084664 A1 WO 2023084664A1 JP 2021041457 W JP2021041457 W JP 2021041457W WO 2023084664 A1 WO2023084664 A1 WO 2023084664A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- driving
- driver
- vehicle
- driving skill
- evaluation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W40/09—Driving style or behaviour
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/0098—Details of control systems ensuring comfort, safety or stability not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/59—Context or environment of the image inside of a vehicle, e.g. relating to seat occupancy, driver state or inner lighting conditions
- G06V20/597—Recognising the driver's state or behaviour, e.g. attention or drowsiness
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B19/00—Teaching not covered by other main groups of this subclass
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0062—Adapting control system settings
- B60W2050/0075—Automatic parameter input, automatic initialising or calibrating means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
- B60W2540/103—Accelerator thresholds, e.g. kickdown
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/221—Physiology, e.g. weight, heartbeat, health or special needs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/225—Direction of gaze
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/10—Historical data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
Definitions
- the present disclosure relates to a driving skill evaluation system that evaluates the driving skill of a driver, a computer program, and a recording medium that records the computer program.
- a system evaluates a driver's driving skills and feeds the evaluation results back to the driver. By feeding back the driving skill evaluation results to the driver, it is expected that the driver will be encouraged to improve his or her driving behavior.
- Patent Literature 1 discloses actual driving behavior data representing a driving situation when a vehicle actually travels a predetermined section to a desired destination, and data indicating that the vehicle actually traveled a predetermined section to a desired destination. Based on the estimated behavior data that estimates the ideal driving situation in the case of hypothesizing, the driving operation situation caused only by the operation of the driver of the vehicle is extracted, and the driving operation data is generated based on the extraction result. and a driving skill evaluation device for evaluating the driving skill of the driver is disclosed.
- the conventional devices for evaluating driving skills disclosed in Patent Document 1 etc. evaluate the driving skills of the driver without considering the situation in which the driver's driving operation is restricted.
- the driving skill evaluation device described in Patent Document 1 generates estimated behavior data by estimating an ideal driving situation based on road shape data representing a road shape of a predetermined section to a desired destination, and calculates actual driving behavior.
- a driver's driving skill is evaluated by comparing data with estimated behavior data. Therefore, even if other vehicles or road conditions impede normal driving operation, or if normal driving operation becomes difficult due to the driver's physical condition, etc., such situations will not be taken into consideration. Driving skills will be evaluated.
- An object of the present invention is to provide an evaluation system, an information processing device, a vehicle, a computer program, and a recording medium recording the computer program.
- a driving skill evaluation system that evaluates the driving skills of a vehicle driver based on vehicle driving state and behavior data, comprising one or more a processor, and one or more memories communicatively connected to the one or more processors, the processor determining at least one of the surrounding environment of the vehicle and the driving state of the driver as a predetermined criterion.
- a driving skill evaluation system is provided that determines whether or not a driver's driving operation is restricted by the comparison, adjusts the driving skill evaluation method based on the restricted situation, and evaluates the driving skill. be.
- an information processing device for evaluating the driving skill of a driver of the vehicle based on data on the driving state and behavior of the vehicle, comprising one or more and one or more memories communicatively connected to the one or more processors, wherein the processor determines at least one of the surrounding environment of the vehicle and the driving state of the driver. By comparing with the determination condition of, it is determined whether or not the driver's driving operation is restricted, the evaluation method of the driving skill is adjusted based on the restricted situation, and the evaluation of the driving skill is evaluated.
- an information processing apparatus for performing.
- an ambient environment detection unit that detects the ambient environment of the vehicle; a driver information acquisition unit that acquires information on the driving state of the driver of the vehicle; A vehicle state detection unit that detects the behavior and operation state of the vehicle, and a driving operation of the driver is restricted by comparing at least one of the surrounding environment of the vehicle and the driving state of the driver with a predetermined judgment condition.
- a driving operation restriction determination unit that determines whether or not a situation is restricted, a driving skill evaluation unit that adjusts the evaluation method of the driving skill based on the restricted situation, and evaluates the driving skill of the driver; is provided.
- a computer program applied to a driving skill evaluation system that evaluates the driving skill of a vehicle driver based on data on the driving state and behavior of the vehicle. and determining whether or not the driver's driving operation is restricted by comparing at least one of the surrounding environment of the vehicle and the driver's driving condition with a predetermined determination condition in one or more processors. adjusting the driving skill evaluation method based on the restricted situation; and evaluating the driving skill, and a recording medium recording the computer program. be done.
- FIG. 1 is a schematic diagram showing a configuration example of a vehicle equipped with a driving skill evaluation system according to the present disclosure
- FIG. 1 is a block diagram showing a configuration example of a driving skill evaluation system according to an embodiment of the present disclosure
- FIG. 4 is a flowchart showing a main routine of driving skill evaluation processing by the driving skill evaluation system according to the first embodiment
- FIG. 4 is an explanatory diagram showing an example of a situation in which a driver's driving operation is restricted
- FIG. 4 is an explanatory diagram showing conditions for determining a situation in which the speed of a preceding vehicle is slow
- FIG. 5 is an explanatory diagram showing conditions for determining a situation in which the vehicle is being pushed by a following vehicle
- FIG. 4 is an explanatory diagram showing conditions for determining a situation in which there is an obstacle on the road;
- FIG. 4 is an explanatory diagram showing conditions for determining a road surface condition is bad;
- FIG. 4 is an explanatory diagram showing conditions for determining a driver in a fatigued state;
- FIG. 4 is an explanatory diagram showing conditions for determining a situation in which the driver does not have enough time;
- 7 is a flowchart of adjustment processing of the driving skill evaluation method according to the first embodiment;
- 4 is a flowchart of adjustment processing of a driving skill evaluation method based on external factors;
- FIG. 10 is a flowchart of adjustment processing of a driving skill evaluation method based on internal factors;
- FIG. 10 is an explanatory diagram showing an example of a screen display that notifies the result of evaluation of driving skill
- FIG. 11 is an explanatory diagram showing a modification of the screen display for notifying the driving skill evaluation result
- 9 is a flow chart of adjustment processing of the driving skill evaluation method according to the second embodiment.
- FIG. 1 is a schematic diagram showing a vehicle 1 equipped with a driving skill evaluation system 10
- FIG. 2 is a block diagram showing an example configuration of the driving skill evaluation system 10. As shown in FIG.
- the driving skill evaluation system 10 includes an ambient environment sensor 11 , an in-vehicle camera 13 , a biosensor 15 , a vehicle state sensor 17 , a vehicle position detection sensor 19 , an input device 21 , an output device 23 and an information processing device 50 .
- These ambient environment sensor 11, in-vehicle camera 13, biosensor 15, vehicle state sensor 17, vehicle position detection sensor 19, input device 21 and output device 23 use a communication bus such as a dedicated line or CAN (Controller Area Network). It is communicably connected to the information processing device 50 via the network.
- CAN Controller Area Network
- the ambient environment sensor 11 consists of one or more sensors that detect information on the ambient environment of the vehicle 1 .
- the ambient environment sensor 11 is composed of front camera 11LF, 11RF, rear camera 11R and LiDAR 11S.
- the forward imaging cameras 11LF and 11RF and the rearward imaging camera 11R photograph the front or rear of the vehicle 1 and generate image data.
- the front cameras 11 LF and 11 RF and the rear camera 11 R are equipped with imaging devices such as CCD (Charged-Coupled Devices) or CMOS (Complementary Metal-Oxide-Semiconductor), and transmit generated image data to the information processing device 50 .
- CCD Charge-Coupled Devices
- CMOS Complementary Metal-Oxide-Semiconductor
- the front cameras 11LF and 11RF are configured as stereo cameras including a pair of left and right cameras, and the rear camera 11R is configured as a so-called monocular camera, but each may be either a stereo camera or a monocular camera.
- the vehicle 1 may be provided with, for example, a camera provided in the side mirror for photographing left rear or right rear, in addition to the forward photographing cameras 11LF and 11RF and the rearward photographing camera 11R.
- the LiDAR 11S transmits an optical wave, receives a reflected wave of the optical wave, and detects an object and the distance to the object based on the time from transmitting the optical wave to receiving the reflected wave.
- the LiDAR 11S transmits the detection data to the information processing device 50.
- the vehicle 1 includes one or more of a radar sensor such as a millimeter wave radar and an ultrasonic sensor instead of or in combination with the LiDAR 11S as a surrounding environment sensor for acquiring information on the surrounding environment.
- a sensor may be provided.
- the in-vehicle camera 13 consists of one or more sensors that detect information about the driver of the vehicle 1.
- the in-vehicle camera 13 has an imaging device such as a CCD or CMOS, takes an image of the inside of the vehicle, and generates image data.
- the in-vehicle photographing camera 13 is arranged so as to photograph the driver of the vehicle 1 .
- the in-vehicle camera 13 transmits the generated image data to the information processing device 50 . Only one in-vehicle camera 13 may be installed, or a plurality of cameras may be installed.
- the biosensor 15 detects the biometric information of the driver and transmits the detected data to the information processing device 50 .
- the biosensor 15 may be, for example, a radio Doppler sensor for detecting the driver's heartbeat, or a non-wearable pulse sensor for detecting the driver's pulse.
- the biosensor 15 may be an electrode set embedded in the steering wheel for measuring the driver's heartbeat or electrocardiogram.
- the biosensor 15 may be a pressure measuring instrument embedded in the driver's seat to measure the seat pressure distribution when the driver is seated on the seat.
- the biosensor 15 may be a displacement sensor that detects changes in the position of the seat belt in order to measure the driver's heart rate or respiration.
- the biosensor 15 may be a TOF (Time of Flight) sensor for detecting information on the position of the driver.
- the biosensor 15 may be a thermography for measuring the surface temperature of the driver's skin.
- the biosensor 15 may be a wearable sensor that is attached to the driver and detects the biometric information of the driver.
- the wearable biosensor 15 may be, for example, a wristwatch type or a wearable device that is worn on the head or arm. These wearable devices may have a function of detecting biological information such as the driver's heartbeat, pulse, blood pressure, and body temperature.
- the wearable biosensor 15 may be connected to the information processing device 50 directly or via communication means such as CAN (Controller Area Network) or LIN (Local Internet).
- the wearable biosensor 15 communicates with the information processing device 50 via wireless communication means such as Bluetooth (registered trademark), NFC (Near Field Communication), wifi (wireless fidelity), or wireless LAN (Local Area Network). It may be configured to be possible.
- the vehicle state sensor 17 is a device that measures information indicating the behavior and operation state of the vehicle 1 .
- Vehicle state sensor 17 includes, for example, at least one of a vehicle speed sensor, an acceleration sensor, and an angular velocity sensor.
- a vehicle speed sensor detects, for example, the rotation speed of the drive shaft of the vehicle 1 .
- the acceleration sensor detects at least longitudinal acceleration, which is acceleration in the longitudinal direction of the vehicle body, and lateral acceleration, which is acceleration in the lateral direction of the vehicle.
- the acceleration sensor may further detect vertical acceleration, which is acceleration in the height direction of the vehicle body.
- the angular velocity sensor measures the rate of change of the rotation angle around the axis in the longitudinal direction of the vehicle body (roll angle), the rotation angle around the axis in the vehicle width direction (pitch angle), and the rotation angle around the axis in the height direction of the vehicle body (yaw angle). To detect.
- the angular velocity sensor may be a yaw rate sensor that detects the rate of change of the yaw angle.
- the vehicle state sensor 17 includes a steering angle sensor, an accelerator pedal sensor and a brake pedal sensor.
- the steering angle sensor detects the rotation angle of the steering wheel or the steering angle of the steered wheels.
- An accelerator pedal sensor and a brake pedal sensor detect the amount of depression of an accelerator pedal or a brake pedal, respectively.
- the data measured by the vehicle state sensor 17 is transmitted to the information processing device 50.
- the vehicle state sensor 17 may include sensors capable of detecting the behavior or operation state of the vehicle 1 in addition to the vehicle speed sensor, acceleration sensor, angular velocity sensor, steering angle sensor, accelerator pedal sensor, and brake pedal sensor.
- the vehicle position detection sensor 19 is a sensor used in a GNSS (Global Navigation Satellite System) represented by a GPS (Global Positioning System), receives satellite signals transmitted from satellites, and detects the position of the vehicle 1 included in the satellite signals. The position information is transmitted to the information processing device 50 .
- the vehicle position detection sensor 19 may have an antenna for receiving satellite signals from other satellite systems for specifying the position of the vehicle 1 other than GPS.
- the input device 21 receives a user's operation input and transmits it to the information processing device 50 .
- the input device 21 may be, for example, a touch panel display or a dial operation device.
- the input device 21 may be a voice recognition device that receives input through the voice of the passenger, or an image recognition device that receives input through gestures.
- the output device 23 is an output device for feeding back the evaluation result of the driving skill of the driver.
- the output device 23 includes an image display device such as an optical panel.
- Output device 23 may include a speaker.
- the information processing device 50 includes, for example, one or more processors such as a CPU (Central Processing Unit), and one or more RAM (Random Access Memory) or ROM (Read Only Memory) communicatively connected to the processor. It is configured with multiple memories. A part or all of the information processing device 50 may be composed of an updateable device such as firmware, or may be a program module or the like that is executed by a command from a processor.
- processors such as a CPU (Central Processing Unit)
- RAM Random Access Memory
- ROM Read Only Memory
- the information processing device 50 functions as a device that evaluates the driving skill of the driver by one or more processors executing a computer program.
- the computer program is a computer program for causing the processor to execute an operation to be executed by the information processing apparatus 50, which will be described later.
- the computer program executed by the processor may be recorded in a recording medium functioning as a storage unit (memory) 53 provided in the information processing device 50, or may be recorded in a recording medium built in the information processing device 50 or in the information processing device. It may be recorded on any recording medium that can be externally attached to the device 50 .
- Recording media for recording computer programs include magnetic media such as hard disks, floppy disks and magnetic tapes, optical media such as CD-ROMs (Compact Disk Read Only Memory), DVDs (Digital Versatile Disks) and Blu-ray (registered trademark). It may be a recording medium, a magneto-optical medium such as a floptical disk, a storage element such as a RAM and a ROM, a flash memory such as a USB (Universal Serial Bus) memory, or any other medium capable of storing programs.
- magnetic media such as hard disks, floppy disks and magnetic tapes
- optical media such as CD-ROMs (Compact Disk Read Only Memory), DVDs (Digital Versatile Disks) and Blu-ray (registered trademark). It may be a recording medium, a magneto-optical medium such as a floptical disk, a storage element such as a RAM and a ROM, a flash memory such as a USB (Universal Serial Bus) memory, or any other
- the information processing device 50 may be a device installed in the vehicle 1, or may be configured by a portable device such as a smart phone.
- the information processing device 50 includes a processing section 51 and a storage section 53 .
- the processing unit 51 includes an ambient environment detection unit 61 , a driver information acquisition unit 63 , a vehicle state detection unit 65 , a driving operation restriction determination unit 67 , a driving skill evaluation unit 69 and a notification processing unit 71 .
- the processing unit 51 is composed of one or more processors such as a CPU, and includes an ambient environment detection unit 61, a driver information acquisition unit 63, a vehicle state detection unit 65, a driving operation restriction determination unit 67, a driving skill evaluation unit 69, and a notification
- Each part of the processing unit 71 is a function realized by execution of a program by a processor.
- the driver information acquisition unit 63 the vehicle state detection unit 65, the driving operation restriction determination unit 67, the driving skill evaluation unit 69, and the notification processing unit 71 are configured by analog circuits. good.
- the storage unit 53 includes one or more storage elements such as RAM or ROM.
- the storage unit 53 stores programs executed by the processing unit 51, various parameters used for executing the programs, acquired data, data of calculation results, and the like.
- a high-precision map database 41 and a driving record database 43 are also connected to the information processing device 50 .
- the high-definition map database 41 is a database that records map data including information on at least the shape of roads and the number of driving lanes.
- the driving record database 43 is a database that records past driving data of multiple drivers.
- the driving record database 43 contains data on the behavior and operation state of the vehicle 1 measured by the vehicle state sensor 17, information identifying individual drivers, data on driving points on map data, data on the surrounding environment of the vehicle 1, Detected data of the driver's biological information, information on the types of situations in which driving operation is restricted, information on vehicle types, and evaluation results of driving skills are recorded in association with each other.
- the high-precision map database 41 and the driving record database 43 may each be installed in the vehicle 1, or may be provided in an external server or the like that can communicate via mobile communication means.
- the surrounding environment detection unit 61 executes processing for detecting the surrounding environment of the vehicle 1 .
- the ambient environment detection unit 61 detects obstacles, road shapes, or driving lanes existing around the vehicle 1 based on the detection data transmitted from the ambient environment sensor 11 .
- the surrounding environment detection unit 61 obtains information about obstacles such as the type, size, position, speed of the detected obstacle, distance from the vehicle 1 to the obstacle, and relative speed between the vehicle 1 and the obstacle. Obstacles to be detected include other running vehicles, parked vehicles, pedestrians, bicycles, side walls, curbs, structures, utility poles, traffic signs, traffic lights, natural objects, and all other objects existing around the own vehicle 1. include.
- the surrounding environment detection unit 61 is recognized by, for example, white lines, side walls, curbs, and the like.
- the driver information acquisition unit 63 executes processing for identifying the driver of the vehicle 1 based on the image data transmitted from the in-vehicle camera 13 .
- the driver information acquisition unit 63 may specify the driver of the vehicle 1 based on information input by the driver or the passenger through an input device such as a touch panel.
- the driver information acquisition unit 63 also detects the direction of the driver's line of sight based on the image data transmitted from the in-vehicle camera 13 .
- the driver information acquisition unit 63 acquires the driver's biometric information based on the detection data transmitted from the biosensor 15 .
- the driver's line-of-sight direction and biometric information form part of the driver's driving state information.
- the vehicle state detection unit 65 executes processing for detecting the behavior and operation state of the vehicle 1 . Specifically, based on the detection data transmitted from the vehicle state sensor 17, the vehicle state detection unit 65 detects the behavior of the vehicle 1 such as the speed, acceleration, jerk or yaw rate of the vehicle 1, the steering wheel, the accelerator pedal and the Detects the operating state of the brake pedal.
- the driving operation restriction determination unit 67 determines whether the vehicle 1 is operated by the driver based on the information on the surrounding environment of the vehicle 1 detected by the surrounding environment detection unit 61 and the information on the driving state of the driver acquired by the driver information acquisition unit 63. of the vehicle is restricted. Specifically, the driving operation restriction determination unit 67 compares at least one of the surrounding environment of the vehicle 1 and the driving state of the driver with a predetermined determination condition to determine whether the driving operation of the driver is restricted. judge. When the driver's driving operation is restricted due to the surrounding environment of the vehicle 1, the situation can be said to be a situation in which the driving operation is restricted due to an external factor that does not depend on the driver's driving state.
- the driving operation restriction determination unit 67 may use information other than the surrounding environment of the vehicle 1 and the driving state of the driver to determine whether or not the driver's driving operation is restricted.
- the driving skill evaluation unit 69 executes a process of evaluating the driving skill of the driver.
- the driving skill evaluation unit 69 evaluates the driving skill by adjusting the driving skill evaluation method based on the situation in which the driver's driving operation is restricted as determined by the driving operation restriction determination unit 67 .
- the driving skill evaluation unit 69 evaluates the driving skill using a preset evaluation method.
- the driving skill evaluation unit 69 calculates the driving skill score according to the basic evaluation method for sections in which the driver's driving operation is not restricted, while the driver's driving operation is restricted. The evaluation method will be adjusted according to the situation where driving operations are restricted. As a result, it is possible to obtain an appropriate driving skill evaluation result by reducing the influence of driving operations that do not depend on the driver's driving skill.
- the notification processing unit 71 executes a process of feeding back the driving skill evaluation result. For example, the notification processing unit 71 drives the output device 23 to display the driving skill evaluation results on the screen. The notification processing unit 71 may notify the driver of the driving skill evaluation result by voice or sound. The notification processing unit 71 also notifies the cause of the adjustment when the evaluation method is adjusted when the driving skill evaluation result is fed back. In this embodiment, when the evaluation method is adjusted, the notification processing unit 71 also notifies the adjustment method of the evaluation method, the accuracy of the driving skill evaluation result, and the adjustment section.
- FIG. 3 is a flowchart showing the main routine of the driving skill evaluation process by the processing unit 51 of the information processing device 50. As shown in FIG.
- the driver information acquisition section 63 of the processing section 51 executes processing to identify the driver of the vehicle 1 (step S11). For example, the driver information acquisition unit 63 executes processing for recognizing the face of the driver sitting in the driver's seat based on the image data transmitted from the in-vehicle camera 13 .
- the driver information acquisition unit 63 records identification information of the identified driver in the storage unit 53 .
- the driver information acquisition unit 63 may identify the driver based on the driver information input to the input device 21 .
- the processing unit 51 determines whether or not to start executing the process of evaluating the driving skill of the driver (hereinafter also referred to as “driving skill evaluation process”) (step S13).
- Driving skill evaluation process the process of evaluating the driving skill of the driver
- the processing unit 51 may determine to start the driving skill evaluation process when the driving system is activated.
- the processing unit 51 determines to start executing the driving skill evaluation process when it detects that the driver is seated in the driver's seat based on the output signal of the in-vehicle camera 13 or the load sensor installed in the driver's seat. You may
- the processing unit 51 identifies the position of the vehicle 1 transmitted from the vehicle position detection sensor 19. It may be determined to start the driving skill evaluation process when approaching the section of . Further, in the case where an occupant such as a driver can arbitrarily set the start and end timings of the driving skill evaluation process, the processing unit 51 causes the driver to drive when the set start timing of the driving skill evaluation process arrives. It may be determined to start execution of the skill evaluation process.
- the processing unit 51 repeats the determination process of step S13. If it is determined to start executing the driving skill evaluation process (S13/Yes), the driver information acquisition unit 63 starts recording the driving state of the driver (step S15). Specifically, the driver information acquisition unit 63 starts processing for detecting the driver's line of sight direction based on the image data transmitted from the in-vehicle camera 13 . In addition, the driver information acquisition unit 63 starts processing for acquiring the biometric information of the driver based on the detection data transmitted from the biosensor 15 . The driver information acquiring unit 63 records the detected driving state information of the driver in the storage unit 53 as time-series data.
- the ambient environment detection unit 61 of the processing unit 51 starts recording the ambient environment of the vehicle 1 (step S17). Specifically, the surrounding environment detection unit 61 starts a process of detecting obstacles, road shapes, or driving lanes existing around the vehicle 1 based on the detection data transmitted from the surrounding environment sensor 11 . In addition, the surrounding environment detection unit 61 acquires the position information of the vehicle 1 transmitted from the vehicle position detection sensor 19, and records it in the storage unit 53 as time-series data together with the surrounding environment information.
- the vehicle state detection unit 65 of the processing unit 51 starts recording the behavior and operation state of the vehicle 1 (step S19). Specifically, based on the detection data transmitted from the vehicle state sensor 17, the vehicle state detection unit 65 detects the behavior of the vehicle 1 such as the speed, acceleration, jerk, or yaw rate of the vehicle 1, and the steering wheel, accelerator pedal, and Detects the operating state of the brake pedal.
- the longitudinal jerk (jerk) and yaw angular acceleration of the vehicle 1 are recorded as the behavior information of the vehicle 1 .
- the longitudinal jerk is obtained by time-differentiating the acceleration detected by the acceleration sensor. Acceleration can also be obtained by time-differentiating the speed of the vehicle 1 detected by the vehicle speed sensor.
- the yaw angular acceleration is obtained by time differentiating the yaw rate.
- the vehicle state detection unit 65 records information on the behavior and operation state of the vehicle 1 in the storage unit 53 as time-series data.
- the driving skill evaluation unit 69 of the processing unit 51 evaluates the driving skill of the driver based on the recorded time-series data of the behavior of the vehicle 1 (step S21). For example, the driving skill evaluation unit 69 evaluates the driver's driving skill based on the time-series data of the behavior of the vehicle 1 recorded in the arbitrarily set travel section after the end of the travel section.
- the travel section is set, for example, as a section from the start of operation of the vehicle 1 to the end of operation. However, the travel section may be set as the travel duration, the travel distance, or the section between specific positions.
- step S21 the driving skill score y is calculated using the recorded time-series data of the behavior of the vehicle 1 without considering the situation in which the driving operation of the driver is restricted.
- formula (1) an example of the formula for calculating the driving skill score y used in the basic evaluation method is shown in formula (1) below.
- y a*x1 + b*x2
- driving skill score x1 Average value of yaw angular acceleration per fixed distance
- x2 Average value of front and rear jerk (jerk) per fixed distance
- the "a*x1" term in the above formula (1) corresponds to an evaluation item that mainly reflects the driving skill of the driver's steering operation.
- the term “b*x2" corresponds to an evaluation item that mainly reflects the driver's driving skill of operating the accelerator pedal and the brake pedal.
- the coefficients a and b of each term are set so that the value of the driving skill score y increases as the values of the yaw angular acceleration and the longitudinal jerk decrease. In other words, the calculation results are set such that the more stable the behavior of the vehicle 1 is, the higher the driving skill is evaluated.
- the driving skill score y calculated using the driving data recorded in a situation where the driving operation is not restricted is approximately between 0 and 100 points.
- the coefficients a and b may be set so as to have the following values.
- the driving skill evaluation unit 69 divides the traveling section to be evaluated by a certain distance, by straight sections and curved sections, and by stopping at intersections, and divides the driving skill scores y1, y2, y1, y2, . . . , yn. Then, the driving skill evaluation unit 69 calculates the driving skill scores y1, y2, . . . , yn is the total score Y.
- the driving operation restriction determination unit 67 of the processing unit 51 determines a situation in which the driver's driving operation of the vehicle 1 is restricted (step S23). Based on time-series data of recorded information on the surrounding environment of the vehicle 1 and information on the driving state of the driver, the driving operation restriction determination unit 67 determines whether or not the driving operation is restricted due to external factors independent of the driving state of the driver and driving state of the driver. A situation in which a driver's driving operation is restricted is determined from the viewpoint of internal factors.
- FIG. 4 is an explanatory diagram showing an example of a situation in which the driver's driving operation is restricted.
- Examples of situations in which the driver's driving operations are restricted by external factors include situations in which the vehicle ahead is slow, the vehicle is being pushed by the following vehicle, there are obstacles on the road, or the road surface is in poor condition. ing.
- the driving operation restriction determination unit 67 determines whether or not the driver's driving operation is restricted due to an external factor, mainly based on the information on the surrounding environment of the vehicle 1 and the driving state of the driver. In addition, a situation in which the driver is in a fatigued state or a situation in which there is no time to spare is exemplified as a situation in which the driver's driving operation is restricted due to internal factors.
- the driving operation restriction determination unit 67 determines whether or not the driving operation of the driver is restricted due to an internal factor, mainly based on the information on the driving state of the driver.
- FIG. 5 to 10 show determination conditions for each situation in which the driver's driving operation is restricted.
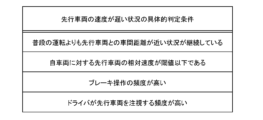
- FIG. 5 shows determination conditions for a situation in which the speed of the preceding vehicle is slow.
- the driving operation restriction determination unit 67 determines that the distance between the vehicle 1 and the preceding vehicle is shorter than the distance between the vehicles during normal driving recorded in the driving record database 43, and the distance continues for a predetermined time or longer. is determined to be in a situation where the speed of the preceding vehicle is slow.
- the inter-vehicle distance during normal driving may be, for example, an average value of inter-vehicle distances recorded in past driving data of the same driver in a situation where the driving operation is not restricted.
- the following distance during normal driving is the average value of the following distances recorded in the past driving data of other drivers when the driving operation is not restricted. There may be.
- the vehicle 1 can be obtained. Even when the driver is driving the own vehicle 1 for the first time, it is possible to determine with high accuracy the situation in which the driver's driving operation of the own vehicle 1 is restricted.
- the driving operation restriction determination unit 67 determines that the speed of the preceding vehicle is low in a section in which the relative speed of the preceding vehicle with respect to the own vehicle 1 is equal to or less than the threshold.
- the relative velocity threshold may be set to any value.
- the driving operation restriction determination unit 67 determines that the speed of the preceding vehicle is slow in a section in which the frequency of brake operation is high. For example, when the number of brake pedal depressions per unit time or unit distance set arbitrarily is equal to or greater than a predetermined threshold value, it can be determined that the frequency of brake operation is high.
- the threshold for the number of times the brake pedal is depressed may be set arbitrarily. It may be set on the basis of the frequency of brake operation that is not caused by the shape.
- the driving operation restriction determination unit 67 determines that the speed of the preceding vehicle is slow in a section in which the driver frequently watches the preceding vehicle. For example, it can be determined that the frequency of brake operation is high when the number of times the vehicle gazes at the preceding vehicle per arbitrarily set predetermined unit time or unit distance is equal to or greater than a predetermined threshold value.
- the threshold for the number of gazes of the preceding vehicle may be set arbitrarily. It may be set based on the number of times the vehicle is gazed at. Whether the driver is gazing at the preceding vehicle can be determined by, for example, whether the driver's line of sight is directed toward the preceding vehicle.
- determination condition for the situation in which the speed of the preceding vehicle is slow shown in FIG. 5 is an example, and the specific contents of the determination condition may be changed as appropriate, and other determination conditions may be set. .
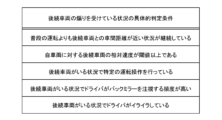
- Fig. 6 shows the conditions for judging a situation in which the vehicle is being pushed by a following vehicle.
- the driving operation restriction determination unit 67 determines that the distance between the vehicle 1 and the following vehicle is shorter than the distance between the vehicles during normal driving recorded in the driving record database 43, and the distance between the vehicles continues for a predetermined time or longer. is determined to be in a situation of being hit by a following vehicle.
- the inter-vehicle distance during normal driving similar to the above-described inter-vehicle distance between the own vehicle 1 and the preceding vehicle, is recorded in the past driving data of the same driver or other drivers in a situation where the driving operation is not restricted. It may be an average value of inter-vehicle distances.
- the driving operation restriction determination unit 67 determines that the section in which the relative speed of the following vehicle with respect to the host vehicle 1 is equal to or greater than the threshold is in a state of being hit by the following vehicle.
- the relative velocity threshold may be set to any value.
- the driving operation restriction determination unit 67 determines that the section in which the driver was performing a specific driving operation in the presence of a following vehicle was in a situation where the following vehicle was pushing the vehicle. For example, the driving operation restriction determination unit 67 determines that the speed of the own vehicle 1 is being hit by a following vehicle in a section in which the speed of the own vehicle 1 is faster than the vehicle speed during normal driving recorded in the driving record database 43. do.
- the vehicle speed during normal driving may be, for example, the average value of vehicle speeds recorded in the past driving data of the same driver when driving on the road with the same speed limit when the driving operation is not restricted. In the absence of past driving data for the same driver, the following distance during normal driving is the road with the same speed limit recorded in the past driving data for other drivers when the driving maneuver is not restricted. It may be the average value of the vehicle speed when traveling.
- the driving operation restriction determination unit 67 determines that the driver is being harassed by a following vehicle in a section in which the driver frequently switches the direction of rotation of the steering wheel and is performing meandering driving, or in a section in which the driver repeats rapid acceleration and deceleration. It may be determined that it was in For example, when the time interval for switching the direction of rotation of the steering wheel is less than a predetermined time and the direction of rotation is switched a predetermined number of times or more, it can be determined that the driver is meandering.
- each threshold may be set arbitrarily.
- the driving operation restriction determination unit 67 determines that the section in which the driver frequently gazes at the rearview mirror in the presence of a following vehicle is in a situation where the following vehicle is swaying. For example, when the number of times the driver gazes at the rearview mirror per unit time or unit distance, which is arbitrarily set, is greater than or equal to a predetermined threshold value, it can be determined that the rearview mirror is frequently gazed at.
- the threshold for the number of times the rearview mirror is gazed may be set arbitrarily. It may be set based on the number of times the mirror is gazed at. Whether the driver is gazing at the rear-view mirror can be determined, for example, by checking whether the driver's line of sight is directed toward the rear-view mirror. Instead of the rearview mirror, or together with the rearview mirror, the number of times the driver gazes at the side mirror may be counted.
- the driving operation restriction determination unit 67 determines that the driver of the own vehicle 1 is in a situation where the driver of the own vehicle 1 is irritated in the presence of the following vehicle, and is in a state of being hit by the following vehicle. For example, based on the image data transmitted from the in-vehicle camera 13, when the driver clicks his tongue or shows an irritated expression, it can be determined that the driver is irritated. Further, it may be determined that the driver is irritated when the voice uttered by the driver is acquired by a microphone and the driver is uttering an irritated state.
- the driver it is possible to determine whether the driver is irritated based on the detection data transmitted from the biosensor 15. Specifically, the driver becomes irritated when at least one condition of the driver's heart rate is rising, blood pressure is rising, or body temperature is rising. It can be determined that Alternatively, based on the image data transmitted from the in-vehicle camera 13, it may be determined that the driver is irritated by determining whether the driver's body temperature has increased or the amount of perspiration has increased.
- Fig. 7 shows the determination conditions for the situation where there are obstacles on the road.
- the driving operation restriction determination unit 67 detects an obstacle on the road ahead in the traveling direction by the surrounding environment sensor 11 until the own vehicle 1 passes through the point where the obstacle exists. It is determined that the object was in a certain state. Obstacles include fallen objects, parked vehicles, pedestrians, bicycles, etc. other than preceding vehicles traveling ahead in the direction of travel, and are recognized by the surrounding environment sensor 11 as objects whose speed is less than a predetermined threshold, for example.
- the driving operation restriction determination unit 67 determines that there is an obstacle on the road in a section in which the driver performs a steering operation that does not match the road shape.
- the road shape may be specified based on the detection data detected by the surrounding environment sensor 11, and specified based on the current position and traveling direction of the vehicle 1 on the map recorded in the high-definition map database 41. good too.
- the driving operation restriction determination unit 67 compares the change in the rotation angle of the steering wheel assumed based on the specified radius of curvature of the road shape with the change in the actually operated steering angle, and determines the rotation angle. A section in which the difference exceeds a predetermined threshold is determined to be an obstacle on the road.
- the driving operation restriction determination unit 67 may set a predetermined section in front of and behind the obstacle on the road. It is determined that there is an obstacle.
- the driving operation restriction determination unit 67 includes information on obstacles in the traveling direction of the vehicle 1 as obstacle information provided from an external device via road-to-vehicle communication or mobile communication means. or when information about an obstacle in the traveling direction of the own vehicle 1 is obtained through inter-vehicle communication with a preceding vehicle or an oncoming vehicle, a predetermined section in front of or behind the obstacle is detected as an obstacle on the road. A certain situation is determined.
- Fig. 8 shows the determination conditions for a situation in which the road surface condition is poor.
- the driving operation restriction determination unit 67 receives information indicating that the road surface condition is bad from the preceding vehicle through inter-vehicle communication
- the driving operation restriction determination unit 67 determines that the road surface condition of the section receiving the information is bad.
- the preceding vehicle determines that the road surface is in a slippery state or the road surface is in a state of severe unevenness based on the wheel slip ratio and the variation in acceleration in the vertical direction of the vehicle body, the subject vehicle 1 is prevented from moving from the preceding vehicle. Get the information.
- the driving operation restriction determination unit 67 determines that the vehicle speed of the own vehicle 1 is slower than the vehicle speed during normal driving recorded in the driving record database 43, even though the distance to the preceding vehicle is large.
- the section is determined to be in a state of poor road surface condition.
- the vehicle speed during normal driving is, for example, the average value of the vehicle speed when driving on the road with the same speed limit recorded in the past driving data of the same driver or other drivers when driving operation is not restricted. It's okay.
- the driving operation restriction determination unit 67 determines that the road surface condition is bad in a section in which the brake operation timing is earlier than the brake operation timing during normal driving recorded in the driving record database 43. .
- the timing of braking operation is evaluated by comparing the starting point of braking operation in a traffic scene where braking operation is performed, for example, when entering a curve or entering an intersection.
- determination condition for the poor road surface condition shown in FIG. 8 is an example, and the specific content of the determination condition may be changed as appropriate, and other determination conditions may be set.
- Fig. 9 shows the conditions for judging a situation in which the driver is in a state of fatigue.
- the driving operation restriction determination unit 67 determines that the driver is in a state of fatigue when the driver is drowsy. Whether the driver is drowsy can be determined by measuring the number of times the driver blinks, the number of times he yawns, the shaking of the head, etc. based on the image data transmitted from the in-vehicle camera 13, for example. Further, it may be determined that the driver is drowsy based on biological information such as the driver's heart rate and the amount of mental muscle activity transmitted from the biological sensor 15 . Furthermore, it may be determined that the driver is drowsy when the steering operation is performed at about 11 Hz based on the change in the rotation angle of the steering wheel.
- the driving operation restriction determination unit 67 determines that the driver is in a state of fatigue in a section in which the continuous driving time, which is the time during which the driver continues driving without taking a break, is equal to or greater than a predetermined threshold. do.
- the continuous driving time may be, for example, the time that has elapsed since the system of the vehicle 1 was activated, or the time during which the same driver is specified by the driver information acquisition unit 63 .
- the predetermined threshold value may be a constant value set in advance. It may be a value set for each driver based on.
- the driving operation restriction determination unit 67 determines that the driver is in a state of fatigue in a section in which the driver is estimated to be in a state of fatigue based on the activity content and activity time of the driver.
- the activity content and activity time of the driver are acquired from schedule information recorded in a smart phone connected to the information processing device 50 via communication means such as Bluetooth (registered trademark).
- the driving operation restriction determination unit 67 estimates the degree of fatigue based on the content of the activity and the duration of the activity. For example, the driving operation limit determination unit 67 obtains a value representing the degree of fatigue by adding a value calculated by multiplying each activity time to the coefficient of the degree of fatigue set according to the content of the activity such as sports or work. , it is estimated that the driver is in a fatigued state when the value representing the degree of fatigue exceeds a predetermined threshold.
- the driving operation restriction determination unit 67 determines that the driver is in a state of fatigue in a section in which there is little conversation between the driver and fellow passengers. Whether or not the driver and fellow passenger are having a conversation is determined based on, for example, mouth movements of the driver and fellow passenger detected based on image data transmitted from the in-vehicle camera 13, and voice data input from a microphone. can judge. In addition, the driving operation restriction determination unit 67 measures the number and duration of conversations between the driver and fellow passengers, and determines that the number of conversations per unit time has decreased or that the duration of conversation has shortened. If so, it is determined that the driver is in a fatigued state. The specific method of determining that the number of conversations has decreased or the duration of conversation has decreased is not particularly limited. You can compare and evaluate.
- the conditions for determining the condition in which the driver is in a fatigued state shown in FIG. 9 are merely examples, and the specific contents of the determination conditions may be changed as appropriate, and further other determination conditions may be set. .
- Fig. 10 shows the determination conditions for situations where the driver does not have enough time.
- the driving operation restriction determination unit 67 determines that the driver is in a situation where there is no time to spare when there is no time to spare until the latest schedule.
- the latest schedule is acquired from schedule information recorded in a smart phone connected to the information processing device 50 via communication means such as Bluetooth (registered trademark), for example.
- the driving operation restriction determination unit 67 can determine whether the driver has time to spare, for example, based on the acquired scheduled start time and distance to the scheduled venue.
- the driving operation restriction determination unit 67 determines that the driver is in a situation where there is no time to spare. determine that there was For example, when there is no following vehicle and the vehicle speed continues to be faster than usual driving, it is determined that the driver is in a situation where there is no time to spare.
- determination conditions for determining situations in which driving operations are restricted may be set. For example, a situation in which many of the drivers with high evaluations of driving skills (comprehensive score Y) have low evaluation results even though the situation is not recorded as a situation in which driving operation is restricted is a situation in which driving operation is restricted.
- Information may be shared among a plurality of vehicles 1 via the driving record database 43 so as to be determined as a situation in which the vehicle is in a state where the vehicle is in a state where the vehicle is in a state where the vehicle is in a state where the vehicle is in a state where the vehicle is in a state where the vehicle is in a state where the vehicle is in a state where the vehicle is in a state where the vehicle is in a state where the vehicle is in a state where the vehicle is in a state where the vehicle is in a state where the vehicle is in a state where the vehicle is in a state where the vehicle is in a state where the vehicle is in a state where the vehicle is in a state where the vehicle is being driven.
- the driving operation restriction determination unit 67 compares the surrounding environment and vehicle state information in a situation where the evaluation results of many drivers are low with the surrounding environment and vehicle state information in a situation where driving operation is not restricted. By doing so, a condition for determining that the situation is a situation in which the driving operation is restricted is extracted. In this way, by adding a new situation in which the driving operation is restricted, it is possible to detect an unexpected situation in which the driving operation is restricted and obtain an appropriate driving skill evaluation result.
- the driving operation restriction determination unit 67 refers to the determination conditions illustrated in FIGS. 5 to 10, and the driver's driving operation is restricted in the travel section in which the driving skill is evaluated after the driving skill enhancement process is started. Determine the appropriate section.
- the driving operation restriction determination unit 67 records information about specific conditions in association with each section in which it is determined that the driving operation is restricted.
- the driving skill evaluation unit 69 adjusts the driving skill evaluation method based on the situation in which the driver's driving operation is restricted, and adjusts the evaluation results calculated in step S21 (step S25).
- the driving skill evaluation unit 69 uses the first adjustment method for adjusting the driving skill evaluation criteria based on the total score Y according to each situation in which the driver's driving operation is restricted. ) to adjust the evaluation items of the basic evaluation method, or the third adjustment method to evaluate by an individual evaluation method different from the basic evaluation method. adjust the method.
- FIG. 11 is a flow chart showing adjustment processing of the driving skill evaluation method.
- the driving skill evaluation unit 69 determines whether there is a section in which the driving operation is restricted due to an external factor shown in FIGS. 5 to 8 among the sections in which the driving operation is restricted (step S31). If there is no travel section in which the driving operation is restricted due to external factors (S31/No), the process proceeds to step S35.
- the skill evaluation unit 69 executes a routine for adjusting the evaluation method based on external factors (step S33).
- FIG. 12 is a flowchart showing a routine for adjusting evaluation methods based on external factors.
- the driving skill evaluation unit 69 adjusts a predetermined reference score (evaluation criterion) Y0 according to the ratio R1 of the travel section in which the driving operation is restricted due to an external factor to the entire evaluation target travel section (first adjustment method) (step S41).
- the reference score Y0 is used as a threshold value for notifying the driver of caution or warning when the total score Y calculated by the above formula (1) is equal to or less than the reference score (evaluation criterion) Y0. It is a setting value. Specifically, when the driving operation of the driver is restricted by external factors caused by other vehicles or the shape of the road shown in FIGS. Make it difficult to be notified of cautions and warnings. For example, if there is no situation where the driver's driving operation is restricted, and the setting is such that a caution or warning is notified when the total score Y is 50 points (reference score Y0) or less, the driving skill evaluation unit 69 lowers the reference score Y0 according to the ratio R1.
- the driving skill evaluation unit 69 subtracts the value obtained by multiplying the ratio R1 by 5 from 50 to obtain the adjusted reference score Y0. This reduces the possibility that the total score Y will become equal to or lower than the reference score Y0 when the driving operation is restricted due to an external factor, making it difficult to notify cautions and warnings. Therefore, it is possible to prevent a decrease in the driver's confidence in the driving skill evaluation result.
- the driving skill evaluation unit 69 determines whether or not there is a travel section in which the acceleration/deceleration operation is restricted among the travel sections in which the driving operation is restricted (step S43). For example, when the driving skill evaluation unit 69 satisfies a predetermined determination condition, such as the preceding vehicle repeatedly decelerating and accelerating rapidly, the driving skill evaluation unit 69 determines that the acceleration/deceleration operation is restricted. determine that there was
- a predetermined determination condition for determining whether or not the acceleration/deceleration operation is restricted is not limited to the above example, and may be set as appropriate.
- step S43/No If there is no travel section in which the acceleration/deceleration operation is restricted (S43/No), the process proceeds to step S47.
- the equation (1) is adjusted so that the weight of the evaluation item "b*x2" relating to the front and rear jerk is reduced (second adjustment method) (step S45). More specifically, when the weight ratio of each evaluation item "a*x1" and "b*x2" in the basic evaluation method is 5:5, the weight ratio of each evaluation item is 5:4 or Adjust the weighting by changing it to 5:3 or the like, or set it to 5:0 so that the evaluation item "b*x2" of the front and rear jerk is not reflected in the driving skill score y.
- the driving skill evaluation unit 69 determines whether or not there is a travel section in which the steering operation is restricted among the travel sections in which the driving operation is restricted (step S47). For example, the driving skill evaluation unit 69 determines that the steering operation is restricted when a preset determination condition is satisfied, such as steering operation to avoid falling objects. do.
- a preset determination condition such as steering operation to avoid falling objects. do.
- the condition for determining whether or not the steering operation is restricted is not limited to the above example, and may be set as appropriate.
- step S51 If there is no travel section in which the steering operation is restricted (S47/No), the process proceeds to step S51. is limited, equation (1) is adjusted so that the weight of the evaluation item "a*x1" relating to the yaw angular velocity is reduced (second adjustment method) (step S49). More specifically, when the weight ratio of each evaluation item "a*x1" and "b*x2" in the basic evaluation method is 5:5, the weight ratio of each evaluation item is 4:5 or The weighting is adjusted by changing it to 3:5, etc., or setting it to 0:5 so that the evaluation item "a*x1" of the yaw angular velocity is not reflected in the driving skill score y.
- the driving skill evaluation unit 69 determines whether or not there is a driving section whose driving skill is to be evaluated by a preset individual evaluation method among the driving sections in which driving operations are restricted (step S51). For example, when traveling on a congested expressway, it is desirable to continue traveling at low speed without repeating stopping and starting as much as possible in order to alleviate traffic congestion. In this case, rather than using the yaw angular velocity evaluation item "a*x1" in the above formula (1), evaluation of the relative speed with respect to the preceding vehicle yields an evaluation result of driving skill that is more suitable for the driving scene. be done. Therefore, the driving skill evaluation unit 69, when there is a section where the speed of the preceding vehicle is slow as shown in FIG. Determine that there is.
- the routine for adjusting the evaluation method based on external factors is terminated.
- the driving skill evaluation unit 69 sets the formula used for evaluating the driving skill of the section in advance. (third adjustment method) (step S53), and the routine for adjusting the evaluation method based on external factors ends.
- x3 Average relative speed to preceding vehicle per fixed distance
- the terms "b*x2" and “c*x3" in the above formula (2) are both evaluation items that reflect the driver's driving skill in operating the accelerator and brake pedals.
- the "b*x2” term is a value that reflects the frequency of stopping and starting operations
- the "c*x3" term is a value that reflects the extent to which the vehicle can maintain the same speed as the preceding vehicle. Become.
- the coefficients b and c of each term are set such that the value of the driving skill score y increases as the value of the longitudinal jerk and the value of the relative speed decrease.
- the driving skill score y calculated using the driving data in which the driving operation is not restricted among the driving data recorded in the driving record database 43 is approximately 0 to 100 points.
- the coefficients b and c may be set to values between
- the driving section for which the driving skill is evaluated by the individual evaluation method is not limited to the above example, and may be set arbitrarily.
- an individual evaluation method set for parking operation and obstacle avoidance operation may be used in addition to traffic congestion.
- the formulas used in each individual evaluation method are appropriately set so that the required driving skill is appropriately evaluated according to each driving scene.
- the driving skill evaluation unit 69 determines whether there is a section in which the driving operation is restricted due to internal factors shown in FIGS. (step S35). If there is no travel section in which the driving operation is restricted due to internal factors (S35/No), the process proceeds to step S39.
- the skill evaluation unit 69 executes a routine for adjusting the evaluation method based on internal factors (step S37).
- FIG. 13 is a flow chart showing a routine for adjusting the evaluation method based on internal factors.
- the driving skill evaluation unit 69 determines whether or not there is a travel section in which the driver is in a fatigued state that satisfies the determination conditions shown in FIG. S61). If there is no driving section in which the driver is in a fatigued state (S61/No), the process proceeds to step S65. On the other hand, if there is a driving section in which the driver is in a state of fatigue (S61/Yes), the driving skill evaluation unit 69 refers to the driving data recorded in the driving record database 43, and restricts driving in a state where the driver is in a state of fatigue. The driving operation to be performed is specified, and the formula (1) is adjusted so that the weight of the evaluation item corresponding to the driving operation is reduced (second adjustment method) (step S63).
- the driving skill evaluation unit 69 compares the driving operation when the driver is in a fatigued state with the driving operation when the driver is not in a fatigued state, based on the driving data recorded in the driving record database 43. To determine the trend of changes in driving maneuvers when the driver is in a fatigued state. Then, the driving skill evaluation unit 69 identifies the driving operation that is restricted when the driver is in a fatigued state, and if the driving operation is a deceleration operation, the weight of the evaluation item "b*x2" of the front-rear jerk is reduced. If the driving operation is a steering operation, the weight of the yaw angular velocity evaluation item "a*x1" is reduced.
- the driving skill evaluation unit 69 determines whether or not there is a travel section in which the driver was in a state of being short on time and which satisfies the determination conditions shown in FIG. Determine (step S65). If there is no driving section in which the driver has no time to spare (S65/No), the routine for adjusting the evaluation method based on internal factors is terminated. On the other hand, if there is a driving section in which the driver does not have enough time (S65/Yes), the driving skill evaluation unit 69 cancels all evaluation method adjustment settings for that driving section, The evaluation method is not adjusted (step S67), and the routine for adjusting the evaluation method based on internal factors is terminated.
- the driving skill evaluation unit 69 may evaluate the driving skill by excluding the driving section determined that the driver was in a situation where there was no time to spare from all the driving sections to be evaluated.
- the composition ratio of the driving skill score y of the driving section is set to zero, and the composition ratio of the driving skill score y of the other driving section is summed. is maintained at 100 (%).
- the evaluation of the section in which the driving operation is restricted is excluded from the calculated driving skill evaluation result, and the accuracy of the driving skill evaluation result can be increased.
- the driving skill evaluation unit 69 calculates an evaluation result after adjustment using an evaluation method that reflects the adjustment results in steps S33 and S37 (step S39). Specifically, for each driving section where driving operation is restricted, the driving skill score y is calculated by adjusting the evaluation method according to the situation at that time, and the driving skill score y for the driving section where driving operation is not restricted is also calculated. Driving skill scores y1, y2, . . . , yn is taken as the total score Y′ after adjustment. As a result, it is possible to obtain an evaluation result of the driving skill in which the influence of the driver's driving operation is reduced in a situation where the driver's driving operation is restricted.
- the notification processing unit 71 of the processing unit 51 executes processing for feeding back the calculated evaluation result to the driver (step S27).
- the notification processing unit 71 drives the output device 23 to display the driving skill evaluation results on the screen.
- Fig. 14 shows an example of a screen display that notifies the driving skill evaluation results.
- the example of the screen display shown in FIG. 14 includes information on the overall score (Y), all travel sections, travel sections for which the evaluation method has been adjusted, the cause of the adjustment of the evaluation method, and the adjustment method of the evaluation method.
- Y the overall score
- part or all of the information to be notified may be output by voice.
- the driver can know the reason why the driving operation was restricted and that the evaluation result of the driving skill was obtained when the driving operation was restricted for that reason. you can know what is going on.
- image data of the travel section being traveled may be displayed together, or a reproduction operation may be made possible.
- the example of the screen display illustrated in FIG. 14 includes information representing the accuracy of the driving skill evaluation result (total score).
- the accuracy may be, for example, information representing the accuracy of determination as to whether or not the driving operation is restricted.
- the accuracy is the data of the surrounding environment when it is determined in step S23 that the driving operation is restricted, the data of the driving state of the driver, and the driving data recorded in the driving record database 43.
- information indicating the degree of similarity with the driving data determined to be in a situation in which the driving operation is restricted similarly, information indicating the degree of similarity with the driving data determined to be in a situation in which the driving operation is restricted.
- the degree of similarity of data may be obtained as the degree of matching of multiple data items such as road shape, number of lanes, road surface conditions, relative positions and relative velocities of other vehicles, presence or absence of obstacles, driver's physical condition. calculation method may be set. By notifying the accuracy of the evaluation result of the driving skill, the driver can know that the evaluation of the driving skill is properly performed, and the reliability of the driving skill evaluation system 10 can be increased.
- the notification processing unit 71 notifies the driver of caution or warning when the total score Y is less than or equal to the standard score Y0 (evaluation standard) adjusted according to the situation in which the driving operation is restricted. Notification of caution or warning may be provided by means of at least one of screen display and audio output. In addition, instead of the total score Y, the notification processing unit 71 may notify caution or warning along with the corresponding driving section when the driving skill score y of each driving section is equal to or less than the reference score Y0 (evaluation standard). .
- the notification processing unit 71 may change the tone and volume according to the contents of the evaluation result such as the value of the total score Y and the accuracy of the evaluation result. For example, the notification processing unit 71 generates a sound with a more pleasant timbre as the value of the total score Y increases. A chord having a greater number of types of musical tones may be generated as the value of the total score Y increases. Further, the notification processing unit 71 may increase the volume as the accuracy of the evaluation result is higher. As a result, when giving feedback on the evaluation results of driving skills to the driver while driving, it is possible to have them intuitively recognize the results through hearing, rather than through visual recognition, thereby providing feedback on driving skills without compromising safe driving. be able to.
- the notification processing unit 71 when notifying the evaluation result of the driving skill, the notification processing unit 71, if it is evaluated that a specific driving operation was appropriately performed in a situation where the driving operation was restricted, the evaluation result of the driving operation You may notify that is highly rated. Specifically, the notification processing unit 71 determines that the evaluation item "a*x1 ' or 'b*x2' values are compared with the evaluation item 'a*x1' or 'b*x2' values under conditions where driving maneuvers are not restricted. Then, the notification processing unit 71 compares the value of the evaluation item "a*x1" or "b*x2" with the value of the evaluation item "a*x1" or "b*x2" in the situation where the driving operation is not restricted.
- the driver can know that the driving operation was properly performed even in a situation where the driving operation was restricted, and can increase the motivation to improve the driving skill.
- FIG. 15 shows a modification of the screen display that notifies the driving skill evaluation results.
- the notification processing unit 71 compares the driving skill evaluation result with the driving skill evaluation result obtained in the past when the vehicle 1 of the same type was driven in the same driving scene and the driving operation was restricted. The comparison result may be notified together.
- the notification processing unit 71 refers to the driving data recorded in the driving record database 43, and selects the same surrounding environment information as the surrounding environment information of the traveling section where the driving operation is restricted among all the traveling sections to be evaluated. It is determined whether or not there is a record of driving data in which the driving operation is restricted in the driving section of the environment.
- the notification processing unit 71 obtains the evaluation result (driving skill score y) in the situation where the current driving operation was restricted and the evaluation result in the situation where the driving operation was restricted in the past. (driving skill score y). Then, the notification processing unit 71 displays the past evaluation result together with the current evaluation result, and also displays whether the evaluation of the driving skill has increased or decreased.
- the notification processing unit 71 may notify that the evaluation result of the driving operation in the section for which the evaluation method is adjusted is highly evaluated.
- the driver can know the progress of the driving operation in the situation where the specific driving operation is restricted, and can increase the motivation to improve the driving skill.
- the text is displayed as "My driving skill score in the driving section with the same adjustment cause has improved from the previous time! Or you may notify by a sound effect.
- the evaluation result may be compared with the evaluation result in a situation where the driving operation is restricted in the driving scene.
- the processing unit 51 determines whether or not to stop the driving skill evaluation process (step S29). For example, when the driving skill evaluation process is executed from when the driver starts driving the vehicle 1 to when the driving is finished, the processing unit 51 stops the execution of the driving skill evaluation process when the feedback of the driving skill evaluation result is completed. Then you can judge. Alternatively, when the processing unit 51 detects that the driver has left the driver's seat based on an output signal from the in-vehicle camera 13 or a load sensor installed in the driver's seat, the processing unit 51 stops executing the driving skill evaluation process. You can judge. When determining to stop the driving skill evaluation process (S29/Yes), the processing unit 51 stops the driving skill evaluation process.
- the processing unit 51 returns to step S13, waits until it is determined to start the driving skill evaluation process, and if it is determined to start the driving skill evaluation process (S13/Yes), The processing of each step described above is repeatedly executed.
- the driving skill evaluation system 10 compares at least one of the surrounding environment of the vehicle 1 and the driving state of the driver with a predetermined determination condition. It is determined whether or not the driving operation of the driver is restricted, and if the driving operation is restricted, the evaluation method of the driving skill is adjusted based on the situation. Therefore, when the driving operation is restricted by an external factor independent of the driver's driving state or an internal factor caused by the driver's driving state, the influence on the driving skill evaluation result is reduced, and the appropriate driving skill evaluation is performed. You can get results.
- the driving skill evaluation system 10 adjusts the driving skill evaluation criteria (reference score) based on the situation in which the driving operation is restricted (first adjustment method). This reduces the possibility that the total score Y will become equal to or lower than the reference score Y0 when the driving operation is restricted due to an external factor, making it difficult to notify cautions and warnings. Therefore, it is possible to prevent a decrease in the driver's confidence in the driving skill evaluation result.
- the driving skill evaluation system 10 adjusts the weighting of the evaluation items of the steering operation or the acceleration/deceleration operation by the driver, or adjusts any of the evaluation items according to the situation in which the driving operation is restricted.
- Evaluate driving skills by exclusion second adjustment method.
- the extent to which driving maneuvers restricted by external factors are reflected in the driving skill score y is reduced, making it easier to obtain driving skill evaluation results based on driving maneuvers that are not restricted. Therefore, it is possible to prevent a decrease in the driver's confidence in the driving skill evaluation result.
- the driving skill evaluation system 10 evaluates the driving skill by an individual evaluation method different from the basic evaluation method (third adjustment method), depending on the situation in which the driving operation is restricted. As a result, evaluation results of driving skills can be obtained using an evaluation method suitable for each driving scene.
- the driving skill evaluation system 10 notifies information indicating the accuracy of the evaluation result when notifying the driving skill evaluation result.
- the driver can know that the evaluation of the driving skill is appropriately performed, and the reliability of the driving skill evaluation system 10 can be increased.
- the driving skill evaluation system 10 notifies information regarding the cause or content of adjustment of the driving skill evaluation method when notifying the driving skill evaluation result.
- the driver can know the reason why the driving operation was restricted and that the evaluation result of the driving skill was obtained when the driving operation was restricted for that reason. you can know what is going on.
- the driving skill evaluation system 10 when the driving skill evaluation system 10 according to the present embodiment notifies the driving skill evaluation result, the driving skill evaluation result is compared with the driving skill evaluation result in the same driving scene in which the driving operation was restricted in the past. will be notified together.
- the driving skill evaluation system 10 according to the present embodiment notifies the driving skill evaluation result, if it is evaluated that a specific driving operation was appropriately performed in a situation where the driving operation was restricted. , to notify that the evaluation result of the driving operation is highly evaluated. As a result, the driver can know the progress of the driving operation in the situation where the specific driving operation is restricted, and can increase the motivation to improve the driving skill.
- the driving skill evaluation system 10 among the driving data recorded in the driving record database 43, is a vehicle of the same type as the own vehicle 1, when another driver with the same level of driving skill drives. At least one of determining a situation in which driving operation is restricted or evaluating driving skill is performed with reference to the driving data. As a result, even when the driver drives the vehicle 1 of a different model than the vehicle the driver usually drives, the driving skill can be evaluated based on the same criteria as for the vehicle the driver usually drives.
- the driving skill evaluation unit 69 adjusts the evaluation method based on the ratio of travel sections in which driving operations are restricted to all travel sections to be evaluated.
- the basic configuration of the driving skill evaluation system 10 according to this embodiment may be the same as the configuration of the driving skill evaluation system 10 described in the first embodiment.
- the evaluation method adjustment processing by the driving skill evaluation unit 69 of the information processing device 50 is performed by the driving skill evaluation unit 69 of the information processing device 50 according to the first embodiment. It is different from the adjustment processing of the evaluation method by Differences of the driving skill evaluation system 10 according to the present embodiment from the driving skill evaluation system 10 according to the first embodiment will be described below.
- FIG. 16 shows a flowchart of processing for adjusting the driving skill evaluation method in this embodiment.
- the flowchart shown in FIG. 16 shows the routine of step S25 for adjusting the evaluation method in the flowchart shown in FIG.
- the driving skill evaluation unit 69 calculates the sum of the distances of the travel sections in which it was determined that the driving operation was restricted in step S23 of the flowchart shown in FIG. 3 (step S71). Next, the driving skill evaluation unit 69 calculates the ratio R of the distance of the traveling section where the driving operation is restricted to the distance of all the traveling sections to be evaluated (step S73).
- the driving skill evaluation unit 69 determines whether or not the calculated ratio R is greater than or equal to a predetermined threshold value R0 (step S75). If the percentage of driving sections with restricted driving operations is too large, the accuracy of the evaluation results of driving skills will be low and the reliability of the evaluation results will decrease.
- a threshold value R0 of the ratio R is set to an arbitrary value as a range in which this is permitted. For example, the threshold value R0 may be a value within the range of 20-30%, but is not limited to this range.
- the driving skill evaluation unit 69 sets to evaluate the driving skill while excluding the traveling section where the driving operation is restricted (step S77).
- driving skill scores y1, y2, . . . , yn is the total score Y, and if there is no driving section where driving operation is restricted, the composition ratio is set so that the sum of the composition ratios of the driving skill score y for each section is 100 (%) equally divided.
- the composition ratio of the driving skill score y of the driving section is set to zero, and the sum of the composition ratio of the driving skill score y of the other driving sections is set to 100 (%). to maintain.
- the evaluation of the section in which the driving operation is restricted is excluded from the calculated driving skill evaluation result, and the accuracy of the driving skill evaluation result can be increased.
- the driving skill evaluation unit 69 lowers the evaluation contribution ratio of the travel section in which the driving operation is restricted so as to evaluate the driving skill.
- Set (step S79) For example, driving skill scores y1, y2, . . . , yn as the total score Y, the driving operation is restricted by reducing the composition ratio of the corresponding section while maintaining the sum of the composition ratio of the driving skill score y in each section at 100(%). Reduce the contribution rate of the evaluation of the traveled section. As a result, while the contribution rate of the evaluation of the section where driving operation is restricted to the calculated evaluation result of driving skill decreases, the evaluation result including the evaluation of driving skill in the situation where driving operation is restricted can be obtained.
- the degree to which the composition ratio is reduced may be set, for example, such that the greater the ratio r of the distance of each travel section where driving operation is restricted to the distance of all travel sections, the greater the degree to which the composition ratio is reduced.
- the driving skill evaluation unit 69 calculates an evaluation result after adjustment using an evaluation method that reflects the adjustment results in steps S77 and S79 (step S81). Specifically, the driving skill evaluation unit 69 evaluates the driving skill scores y1, y2, . . . , yn, and reduce or exclude the contribution rate of the driving skill score y in the driving section where the driving operation is restricted, and calculate the driving skill score y1, y2, . . . , yn to be the total score Y′ after adjustment. As a result, it is possible to obtain an evaluation result of the driving skill in which the influence of the driver's driving operation is reduced in a situation where the driver's driving operation is restricted.
- the evaluation when calculating the driving skill score y for each travel section of all travel sections to be evaluated, the evaluation is performed according to the situation in which the driving operation is restricted as described in the first embodiment. You can adjust the method.
- the driving skill evaluation system 10 according to the second embodiment uses the driving skill evaluation method according to the ratio R of the travel section where the driving operation is restricted to the distance of all the travel sections to be evaluated. to adjust. Even with the driving skill evaluation system 10 according to the second embodiment, effects similar to those of the driving skill evaluation system 10 according to the first embodiment can be obtained.
- the driving skill evaluation system 10 obtains the driving skill evaluation result by excluding the evaluation of the section where the driving operation is restricted when the ratio R is equal to or less than the predetermined threshold value R0. As a result, it is possible to improve the accuracy of the driving skill evaluation result. Further, when the ratio R exceeds the predetermined threshold value R0, the driving skill evaluation system 10 lowers the contribution rate of the evaluation of the driving section in which the driving operation is restricted, and evaluates the driving skill. As a result, it is possible to obtain an evaluation result of the driving skill in which the influence of the driver's driving operation is reduced in a situation where the driver's driving operation is restricted.
- the adjustment method of the evaluation method of this embodiment is not limited to the above example.
- the driving skill score y in the section where the driving operation is restricted with the driving skill score y in the section where the driving operation is not restricted, the driving skill score assuming that the driving operation is not restricted is estimated. You may At that time, from the driving skill score y of the section similar to the road shape of the section where the driving operation was not restricted among the sections where the driving operation was not restricted, the driving when it was assumed that the driving operation was not restricted A skill score may be estimated.
- 1 vehicle (own vehicle), 10: driving skill evaluation system, 11: ambient environment sensor, 13: in-vehicle camera, 15: biological sensor, 17: vehicle state sensor, 19: vehicle position detection sensor, 21: input device, 23: Output device, 41: High definition map database, 43: Driving record database, 50: Information processing device, 51: Processing unit, 53: Storage unit, 61: Surrounding environment detection unit, 63: Driver information acquisition unit, 65: Vehicle state detection unit 67: driving operation restriction determination unit 69: driving skill evaluation unit 71: notification processing unit Y: total score Y0: reference score y: driving skill score
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Mathematical Physics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Human Computer Interaction (AREA)
- Business, Economics & Management (AREA)
- Educational Technology (AREA)
- Educational Administration (AREA)
- Entrepreneurship & Innovation (AREA)
- Traffic Control Systems (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/041457 WO2023084664A1 (ja) | 2021-11-11 | 2021-11-11 | 運転技能評価システム、情報処理装置、車両及びコンピュータプログラム並びにコンピュータプログラムを記録した記録媒体 |
| JP2023559280A JP7564383B2 (ja) | 2021-11-11 | 2021-11-11 | 運転技能評価システム、情報処理装置、車両及びコンピュータプログラム並びにコンピュータプログラムを記録した記録媒体 |
| US18/469,629 US12365346B2 (en) | 2021-11-11 | 2023-09-19 | Driving skill evaluation system, information processing device, vehicle, and non-transitory computer-readable storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/041457 WO2023084664A1 (ja) | 2021-11-11 | 2021-11-11 | 運転技能評価システム、情報処理装置、車両及びコンピュータプログラム並びにコンピュータプログラムを記録した記録媒体 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/469,629 Continuation US12365346B2 (en) | 2021-11-11 | 2023-09-19 | Driving skill evaluation system, information processing device, vehicle, and non-transitory computer-readable storage medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023084664A1 true WO2023084664A1 (ja) | 2023-05-19 |
Family
ID=86335375
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/041457 Ceased WO2023084664A1 (ja) | 2021-11-11 | 2021-11-11 | 運転技能評価システム、情報処理装置、車両及びコンピュータプログラム並びにコンピュータプログラムを記録した記録媒体 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12365346B2 (https=) |
| JP (1) | JP7564383B2 (https=) |
| WO (1) | WO2023084664A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116894501A (zh) * | 2023-09-05 | 2023-10-17 | 深圳友浩车联网股份有限公司 | 一种基于车联网的网约车管理系统及方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010285954A (ja) * | 2009-06-12 | 2010-12-24 | Fujitsu Ten Ltd | 車載装置及び運転評価システム |
| JP2015143936A (ja) * | 2014-01-31 | 2015-08-06 | 三菱電機株式会社 | 車両用運転支援装置、サーバ、車両運転支援システム、および、車両用運転支援プログラム |
| JP2017191133A (ja) * | 2016-04-11 | 2017-10-19 | 株式会社デンソー | 運転支援装置及び運転支援プログラム |
| WO2018096688A1 (ja) * | 2016-11-28 | 2018-05-31 | 本田技研工業株式会社 | 運転支援装置、運転支援システム、プログラム及び運転支援装置の制御方法 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1997705B1 (en) * | 2005-12-28 | 2012-06-13 | National University Corporation Nagoya University | Drive behavior estimating device, drive supporting device, vehicle evaluating system, driver model making device, and drive behavior judging device |
| DE102006011481A1 (de) * | 2006-03-13 | 2007-09-20 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Unterstützen eines Führens eines Fahrzeugs |
| US7548805B2 (en) * | 2006-03-27 | 2009-06-16 | Fujitsu Ten Limited | Vehicle control apparatus, vehicle control method and vehicle slip suppressing apparatus |
| JP2008298979A (ja) | 2007-05-30 | 2008-12-11 | Pioneer Electronic Corp | 運転技量評価装置、運転技量評価方法及び運転技量評価プログラム |
| JP2010287162A (ja) * | 2009-06-15 | 2010-12-24 | Aisin Aw Co Ltd | 運転支援装置及びプログラム |
| JP5742341B2 (ja) * | 2011-03-18 | 2015-07-01 | マツダ株式会社 | 車両用運転支援装置 |
| JP5856387B2 (ja) * | 2011-05-16 | 2016-02-09 | トヨタ自動車株式会社 | 車両データの解析方法及び車両データの解析システム |
| US20110307188A1 (en) * | 2011-06-29 | 2011-12-15 | State Farm Insurance | Systems and methods for providing driver feedback using a handheld mobile device |
| US20130052614A1 (en) * | 2011-08-31 | 2013-02-28 | Pulsar Informatics, Inc. | Driver Performance Metric |
| CN110178104A (zh) * | 2016-11-07 | 2019-08-27 | 新自动公司 | 用于确定驾驶员分心的系统和方法 |
| US10745030B2 (en) * | 2017-12-30 | 2020-08-18 | The Hi-Tech Robotic Systemz Ltd | Providing location and driving behavior based alerts |
| JP7226938B2 (ja) * | 2018-07-30 | 2023-02-21 | 本田技研工業株式会社 | 運転評価システム、運転評価方法、プログラム、及び媒体 |
| JP7233299B2 (ja) * | 2019-05-24 | 2023-03-06 | 日産自動車株式会社 | 運転挙動制御方法及び運転挙動制御装置 |
| JP7402001B2 (ja) * | 2019-09-18 | 2023-12-20 | 株式会社Subaru | 車両の自動運転制御装置 |
| JP2021156601A (ja) * | 2020-03-25 | 2021-10-07 | 株式会社Jvcケンウッド | ナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラム |
| JP7544502B2 (ja) * | 2020-04-02 | 2024-09-03 | 株式会社Subaru | 運転支援装置及びデータ収集システム |
| KR20210143376A (ko) * | 2020-05-19 | 2021-11-29 | 현대두산인프라코어(주) | 건설장비의 운행가이드 정보 제공 장치 및 방법 |
-
2021
- 2021-11-11 JP JP2023559280A patent/JP7564383B2/ja active Active
- 2021-11-11 WO PCT/JP2021/041457 patent/WO2023084664A1/ja not_active Ceased
-
2023
- 2023-09-19 US US18/469,629 patent/US12365346B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010285954A (ja) * | 2009-06-12 | 2010-12-24 | Fujitsu Ten Ltd | 車載装置及び運転評価システム |
| JP2015143936A (ja) * | 2014-01-31 | 2015-08-06 | 三菱電機株式会社 | 車両用運転支援装置、サーバ、車両運転支援システム、および、車両用運転支援プログラム |
| JP2017191133A (ja) * | 2016-04-11 | 2017-10-19 | 株式会社デンソー | 運転支援装置及び運転支援プログラム |
| WO2018096688A1 (ja) * | 2016-11-28 | 2018-05-31 | 本田技研工業株式会社 | 運転支援装置、運転支援システム、プログラム及び運転支援装置の制御方法 |
Non-Patent Citations (1)
| Title |
|---|
| ANONYMOUS: "Smart Insurance 'Driving Skill' Test", APP INSTRUCTION MANUAL, VERSION 3.0.0., 1 October 2014 (2014-10-01), pages 1 - 55, XP093065996 * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116894501A (zh) * | 2023-09-05 | 2023-10-17 | 深圳友浩车联网股份有限公司 | 一种基于车联网的网约车管理系统及方法 |
| CN116894501B (zh) * | 2023-09-05 | 2023-11-28 | 深圳友浩车联网股份有限公司 | 一种基于车联网的网约车管理系统及方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US12365346B2 (en) | 2025-07-22 |
| JP7564383B2 (ja) | 2024-10-08 |
| US20240001935A1 (en) | 2024-01-04 |
| JPWO2023084664A1 (https=) | 2023-05-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6237685B2 (ja) | 車両制御装置 | |
| JP5854133B2 (ja) | 運転特性推定装置及び運転支援システム | |
| JP6201927B2 (ja) | 車両制御装置 | |
| JP6269360B2 (ja) | 運転支援システム及び運転支援方法 | |
| US20170313319A1 (en) | Driving consciousness estimation device | |
| CN107757615A (zh) | 自动驾驶车辆的控制系统及控制方法 | |
| JP6555646B2 (ja) | 車両運転支援システム | |
| JP2015219830A (ja) | 運転支援装置 | |
| JP6509940B2 (ja) | 運転支援装置および運転支援方法 | |
| JP7656676B2 (ja) | 交通安全支援システム及びコンピュータプログラム | |
| JP7590109B2 (ja) | 情報処理装置、データ収集システム及びサーバ | |
| JP2019088522A (ja) | 情報処理装置、運転者モニタリングシステム、情報処理方法、及び情報処理プログラム | |
| JP2022047580A (ja) | 情報処理装置 | |
| CN115257813B (zh) | 通过施工障碍物的智能驾驶控制方法及车辆 | |
| JP2010067164A (ja) | 緊急車両認知支援装置 | |
| US12365346B2 (en) | Driving skill evaluation system, information processing device, vehicle, and non-transitory computer-readable storage medium | |
| JP6648551B2 (ja) | 自動運転装置 | |
| JP7610039B2 (ja) | 運転支援装置及びコンピュータプログラム並びにコンピュータプログラムを記録した記録媒体 | |
| JP2017193210A (ja) | 車両の制御装置 | |
| JP7750701B2 (ja) | 運転支援装置及びコンピュータプログラム | |
| JP2007161056A (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP2017194930A (ja) | 移動体の自動運転制御システム | |
| JP7767220B2 (ja) | 交通安全支援システム | |
| US12583460B2 (en) | Driving support device, method, and computer program for supporting driving | |
| US20250128725A1 (en) | Driving assistance apparatus and recording medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21964019 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023559280 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21964019 Country of ref document: EP Kind code of ref document: A1 |