図1は本発明による第1実施例の移動体の自動運転制御システムのブロック図を示している。移動体は車両や移動ロボットなどを含む。以下では、移動体が車両である場合を例にとって説明する。図1を参照すると、車両の自動運転制御システムは外部センサ1、GPS受信部2、内部センサ3、地図データベース4、記憶装置5、環境地図記憶装置6、ナビゲーションシステム7、HMI(Human Machine Interface)8、種々のアクチュエータ9、電子制御ユニット(ECU,Electronic Computer Unit)10、及びドライバ状態センサ21を備える。
外部センサ1は自車両の外部又は周囲の情報を検出するための検出機器である。外部センサ1はライダー(LIDAR:Laser Imaging Detection and Ranging)、レーダー(Radar)、及びカメラのうち少なくとも1つを備える。本発明による第1実施例では図2に示されるように、外部センサ1は、少なくとも1つのライダーSO1、少なくとも1つのレーダーSO2、及び少なくとも1つのカメラSO3を備える。
ライダーSO1はレーザー光を利用して自車両Vの外部の物体を検出する装置である。本発明による第1実施例では、物体は、移動不能な物体である静的物体(例えば、建物、道路など)、移動可能な物体である動的物体(例えば、他車両、歩行者など)、基本的には移動不能であるが容易に移動可能な物体である準静的物体(例えば、立て看板、ゴミ箱、樹木の枝など)を含む。図2に示される例では、単一のライダーSO1が車両Vの屋根上に設置される。別の実施例(図示しない)では、例えば4つのライダーが車両Vの四隅においてバンパーにそれぞれ取り付けられる。ライダーSO1は、自車両Vの全周囲に向けてレーザー光を順次照射し、その反射光から物体に関する情報を計測する。この物体情報はライダーSO1から物体までの距離及び向き、すなわちライダーSO1に対する物体の相対位置を含む。ライダーSO1により検出された物体情報は電子制御ユニット10へ送信される。一方、レーダーSO2は、電波を利用して自車両Vの外部の物体を検出する装置である。図2に示される例では、例えば4つのレーダーSO2が車両Vの四隅においてバンパーにそれぞれ取り付けられる。レーダーSO2は、レーダーSO2から自車両Vの周囲に電波を発射し、その反射波から自車両Vの周囲の物体に関する情報を計測する。レーダーSO2により検出された物体情報は電子制御ユニット10へ送信される。カメラSO3は図2に示される例では、車両Vのフロントガラスの内側に設けられた単一のステレオカメラを備える。ステレオカメラSO3は自車両Vの前方をカラー又はモノクロ撮影し、ステレオカメラSO3によるカラー又はモノクロ撮影情報は電子制御ユニット10へ送信される。
再び図1を参照すると、GPS受信部2は、3個以上のGPS衛星からの信号を受信し、それにより自車両又は外部センサ1の絶対位置(例えば自車両Vの緯度、経度及び高度)を表す情報を検出する。GPS受信部2により検出された自車両の絶対位置情報は電子制御ユニット10へ送信される。
内部センサ3は、自車両Vの走行状態を検出するための検出機器である。自車両Vの走行状態は、自車両の速度、加速度、及び姿勢のうち少なくとも1つにより表される。内部センサ3は、車速センサ及びIMU(Inertial Measurement Unit)の一方又は両方を備える。本発明による第1実施例では内部センサ3は車速センサ及びIMUを備える。車速センサは、自車両Vの速度を検出する。IMUは例えば3軸のジャイロ及び3方向の加速度センサを備え、自車両Vの3次元の角速度及び加速度を検出し、それらに基づいて自車両Vの加速度及び姿勢を検出する。内部センサ3により検出された自車両Vの走行状態情報は電子制御ユニット10へ送信される。
地図データベース4は、地図情報に関するデータベースである。この地図データベース4は例えば車両に搭載されたHDD(Hard disk drive)内に記憶されている。地図情報には、例えば道路の位置情報、道路形状の情報(例えば、カーブと直線部の種別、カーブの曲率、交差点、合流点及び分岐点の位置など)などが含まれる。
記憶装置5には、ライダーSO1により検出された物体の三次元画像及びライダーSO1の検出結果に基づき作成された自動運転専用の道路地図が記憶されている。これら物体の三次元画像及び道路地図は常時又は定期的に更新される。
環境地図記憶装置6には環境地図情報(後述する)が記憶されている。
ナビゲーションシステム7は、HMI8を介し自車両Vのドライバによって設定された目的地まで自車両Vを案内する装置である。このナビゲーションシステム7は、GPS受信部2により検出された自車両Vの現在の位置情報と地図データベース4の地図情報とに基づいて、目的地に至るまでの目標ルートを演算する。この自車両Vの目標ルートの情報は電子制御ユニット10へ送信される。
HMI8は、自車両Vの乗員と車両の自動運転制御システムとの間で情報の出力及び入力を行うためのインターフェイスである。本発明による第1実施例ではHMI8は、文字又は画像情報を表示するディスプレイ、音を発生するスピーカ、及び乗員が入力操作を行うための操作ボタン、タッチパネル、又は音声認識装置(マイク)を備える。
アクチュエータ9は、電子制御ユニット10からの制御信号に応じて自車両Vの走行操作を制御するための装置である。車両Vの走行操作には車両Vの駆動、制動及び操舵が含まれる。アクチュエータ9は、駆動アクチュエータ、制動アクチュエータ、及び操舵アクチュエータのうちの少なくとも1つを備える。駆動アクチュエータは、車両Vの駆動力を提供するエンジン又は電気モータの出力を制御し、それにより車両Vの駆動操作を制御する。制動アクチュエータは、車両Vの制動装置を操作し、それにより車両Vの制動操作を制御する。操舵アクチュエータは、車両Vの操舵装置を操作し、それにより車両Vの操舵操作を制御する。
自動運転が可能な状態において、HMI8において乗員により自動運転を開始すべき入力操作がなされると、電子制御ユニット10に信号が送られて自動運転が開始される。すなわち、車両Vの走行操作である駆動、制動及び操舵がアクチュエータ9により制御される。一方、HMI8において乗員により自動運転を停止すべき入力操作がなされると、電子制御ユニット10に信号が送られて自動運転が停止され、車両Vの走行操作の少なくとも1つがドライバにより行われるマニュアル運転が開始される。言い換えると、自動運転からマニュアル運転に切り換えられる。なお、自動運転時にドライバにより車両Vの走行操作が行なわれたとき、すなわちドライバがステアリングをあらかじめ定められたしきい量以上操作したとき、アクセルペダルをあらかじめ定められたしきい量以上踏み込んだとき、又は、ブレーキペダルをあらかじめ定められたしきい量以上踏み込んだときにも、自動運転からマニュアル運転に切り換えられる。更に、自動運転中に自動運転が困難と判断されたときには、HMI7を介してドライバに対しマニュアル運転が要求される。
電子制御ユニット10は、双方向性バスによって相互に接続されたCPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)などを備えたコンピュータである。図1に示されるように、本発明による第1実施例の電子制御ユニット10は、ROM及びRAMを有する記憶部11、自動運転制御部12、停止要求判定部13、及び停止適合領域決定部14を備える。
自動運転制御部12は、車両Vの自動運転を制御するように構成されている。停止要求判定部13は、車両Vを停止すべきか否かを判定するように構成されている。停止適合領域決定部14は、環境地図記憶装置6内の環境地図情報に基づいて、車両Vが停止するのに適した停止適合領域を決定するように構成されている。
本発明による第1実施例では、自動運転制御部12は図3に示されるように、周辺認識部12a、自己位置決定部12b、進路生成部12c、及び移動制御部12dを備える。
周辺認識部12aは、外部センサ1を用いて、自車両Vの周辺の状況を認識するように構成されている。すなわち、周辺認識部12aは、外部センサ1の検出結果(例えば、ライダーSO1による物体の三次元画像情報、レーダーSO2による物体情報、カメラSO3による撮影情報など)に基づいて、自車両Vの周辺状況を認識する。この外部状況には、例えば、自車両Vに対する走行車線の白線の位置、車両Vに対する車線中心の位置、道路幅、道路の形状(例えば、走行車線の曲率、路面の勾配変化など)、車両Vの周辺の物体の状況(例えば、静的物体と動的物体を区別する情報、車両Vに対する物体の位置、車両Vに対する物体の移動方向、車両Vに対する物体の相対速度など)が含まれる。
自己位置決定部12bは、自車両Vの絶対位置を決定するように構成されている。すなわち、自己位置決定部12bは、GPS受信部2からの自車両Vのおおまかな位置と、周辺認識部12aにより認識された自車両Vの周辺状況と、記憶装置5内に記憶されている物体に関する情報及び自動運転専用の道路地図とに基づいて、自車両Vの正確な絶対位置を算出する。
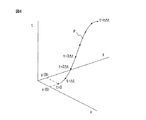
進路生成部12cは、車両Vの進路を生成するように構成されている。本発明による第1実施例では、進路は、時間tを表す情報と、当該時間tにおける車両の絶対位置(x(t),y(t))を表す情報と、当該時間tにおける車両の走行状態(例えば、速度v(t)及び進行方向θ(t))を表す情報との組合せ(t,x(t),y(t),v(t),θ(t))を含む。ここで、x(t)は例えば緯度により表され、y(t)は例えば経度により表される。例えば、まず、現在時刻(t=0)における組合せ(0,x(0),y(0),v(0),θ(0))を用いて、時間Δtが経過した後の組合せ(Δt,x(Δt),y(Δt),v(Δt),θ(Δt))が算出される。次いで、更に時間Δtが経過した後の組合せ(2Δt,x(2Δt),y(2Δt),v(2Δt),θ(2Δt))が算出される。次いで、更に時間nΔが経過した後の組合せ(nΔt,x(nΔt),y(nΔt),v(nΔt),θ(nΔt))が算出される。これらの組合せの一例が図4に示されている。すなわち図4は、時間t及び車両Vの絶対位置(x(t),y(t))により規定された三次元空間内に上述の組合せ(t,x(t),y(t),v(t),θ(t))の一例をプロットしたものである。図4に示されるように、複数の組合せ(t,x(t),y(t),v(t),θ(t))を順次結んで得られる曲線が進路Pとなる。
移動制御部12dは、車両Vの移動制御を行うように構成されている。具体的には、移動制御部12dは、進路生成部12cにより生成された進路Pに沿って移動するように車両Vを制御するように構成されている。すなわち、移動制御部12dは、進路Pが有する組合せ(t,x(t),y(t),v(t),θ(t))が実現されるようにアクチュエータ9を制御して、車両Vの駆動、制動及び操舵を制御する。
ドライバ状態センサ21はドライバの状態を検出するための検出機器である。ドライバの状態は例えば、ドライバの外観及び内部状態の一方又は両方により表される。ドライバの外観は例えば、ドライバの視線、ドライバの瞼の状態、ドライバの顔の向き、ドライバの姿勢、のうちの少なくとも1つにより表される。ドライバの姿勢は、ドライバの身体の位置又は向き、ドライバの手の位置などによって表わされる。一方、ドライバの内部状態は例えば、ドライバの心拍数、血圧、皮膚電位のような生理的指標により表される。ドライバの状態がドライバの視線、ドライバの瞼の状態、ドライバの顔の向き、ドライバの姿勢、などにより表される場合には、ドライバ状態センサは、例えば車両Vの内部に取り付けられたドライバカメラを備える。このドライバカメラはドライバを撮影する。ドライバの状態がドライバの内部状態により表わされる場合には、ドライバ状態センサ21は、例えばステアリングに取り付けられた内部状態センサを備える。この内部状態センサは例えばドライバの生理的指標を検出する。ドライバ状態センサ21により検出されたドライバの状態情報は電子制御ユニット10へ送信される。
本発明による第1実施例では、停止要求判定部13は、ドライバ状態センサ21により検出されたドライバ状態に基づいて、車両Vを停止すべきか否かを判定するように構成されている。具体的には、ドライバがマニュアル運転を行うことができない状態にあるか否かが判定される。例えば、ドライバが死亡状態又は失神状態にあるときに、ドライバがマニュアル運転を行うことができない状態にあると判定される。ドライバがマニュアル運転を行うことができない状態にあると判定されたときには、車両Vを停止すべきと判定される。言い換えると、車両Vの停止要求が出力される。これに対し、ドライバがマニュアル運転を行うことができない状態にあると判定されないときには、車両Vの停止要求は出力されない。
停止要求判定部13から車両Vの停止要求が出力されると、停止適合領域決定部14は、環境地図記憶装置6内の環境地図情報に基づいて、停止適合領域を決定する。次いで、進路生成部12cは、車両Vが停止適合領域内に停止するように進路Pを生成する。次いで、移動制御部12dは、車両Vが進路Pに沿って移動するように車両Vを制御する。その結果、車両Vが停止適合領域内に自動的に停止される。このようにして緊急避難が行われる。
一方、停止要求判定部13から車両Vの停止要求が出力されないときには、進路生成部12cは、通常の進路Pを生成する。すなわち、車両Vが上述の目標ルートに従って移動するように、進路Pが生成される。この場合、進路Pは、法令を順守しつつ、安全にかつ最短時間で目的地に到達するように生成される。
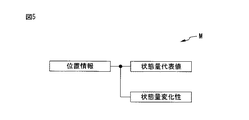
次に、本発明による第1実施例の環境地図情報を説明する。図5は本発明による第1実施例の環境地図情報Mを概略的に示している。本発明による第1実施例の環境地図情報Mは図5に示されるように、空間内の複数の位置をそれぞれ表す位置情報と、それぞれ対応する位置情報と関連付けられた状態量代表値と、それぞれ対応する位置情報と関連付けられた状態量変化性と、を有する。なお、本発明による第1実施例では、上述の空間は三次元空間である。別の実施例(図示しない)では、空間は二次元空間である。
或る位置の状態量代表値及び状態量変化性は、当該或る位置の状態量に基づいて算出されるものである。本発明による第1実施例では、或る位置の状態量は、当該或る位置に物体が存在する確率により表される。この場合、状態量は例えば、ゼロから1までの連続値の形で算出される。別の実施例(図示しない)では、状態量は離散値の形で算出される。
或る位置の状態量代表値は、当該或る位置の状態を適切に表す数値である。本発明による第1実施例では、状態量代表値は、例えば、ゼロから1までの連続値の形で算出される。別の実施例(図示しない)では、状態量代表値は離散値の形で算出される。
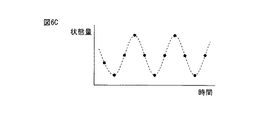
一方、或る位置の状態量変化性は、当該或る位置の状態量の時間に対する変化のしやすさを表す数値である。本発明による第1実施例では、状態量変化性は、連続値の形で算出される。別の実施例(図示しない)では、状態量変化性は離散値の形で算出される。次に、図6A、図6B、及び図6Cを参照して、状態量変化性を更に説明する。なお、図6A、図6B、及び図6Cにおいて、検出された状態量がプロットされている。
状態量変化性は、例えば、時間に対する状態量の変化の頻度や変化の程度などによって表される。すなわち、図6Bに示される例の状態量は、図6Aに示される例の状態量に比べて、変化の頻度が高く、時間に対し変化しやすい。したがって、図6Bに示される例の状態量変化性は、図6Aに示される例の状態量変化性よりも高い。一方、図6Cに示される例の状態量は、図6Aに示される例の状態量に比べて、変化の程度が大きく、時間に対し変化しやすい。したがって、図6Cに示される例の状態量変化性は、図6Aに示される例の状態量変化性よりも高い。
次に、環境地図情報Mの作成例を説明する。この作成例では、空間内の位置を表す位置情報と位置の状態量とを検出する環境検出装置と、環境地図用の記憶装置と、環境地図作成用の電子制御ユニットと、を備え、環境地図作成用の電子制御ユニットは、空間内の複数の位置のそれぞれについて、前記位置を表す位置情報と、互いに異なる時刻における前記位置の状態量とを前記環境検出装置により検出するように構成されている環境検出部と、前記複数の位置のそれぞれについて、検出された前記状態量を用いて前記状態量代表値を算出する状態量算出部と、前記複数の位置のそれぞれについて、検出された前記状態量を用いて前記状態量変化性を算出するように構成されている変化性算出部と、前記状態量代表値及び前記状態量変化性をそれぞれ対応する前記位置情報と関連付けて環境地図用の記憶装置に記憶する記憶部と、を備えた環境地図作成システムを用いて、環境地図情報Mが作成される。環境地図作成システムは車両のような移動体に搭載される。環境検出装置は、例えば、環境地図作成システムの周囲の物体を検出する外部センサ(例えば、ライダー)と、内部センサと、環境地図作成システムの絶対位置を検出するGPS受信部と、を備える。
図7は、環境地図作成システムのライダーLから照射されたレーザー光が物体OBJで反射した場合を示している。この場合、図7に黒丸で示されるように、位置PXに反射点が形成される。ライダーLは、反射光から、反射点の位置PXの相対位置情報を計測する。この計測結果から、位置PXに物体OBJが存在するということがわかり、したがって位置PXの状態量、すなわち物体存在確率は1となる。また、ライダー1からの位置PXの相対位置情報と、環境地図作成システムのGPS受信部からの環境地図作成システムの絶対位置情報とから、位置PXの絶対位置情報がわかる。更に、図7に白丸で示される反射点でない位置PYに物体が存在しないということがわかり、したがって位置PYの状態量すなわち物体存在確率はゼロとなる。また、ライダーLからの位置PXの相対位置情報と、環境地図作成システムのGPS受信部からの環境地図作成システムの絶対位置情報とから、位置PYの絶対位置情報がわかる。このようにして、位置PX,PYの絶対位置情報及び状態量が算出される。
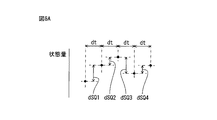
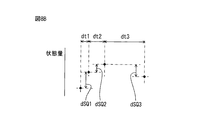
環境地図情報Mの作成例では、環境地図作成システムのライダーLは物体情報を例えば数十msのインターバルで繰り返し検出する。言い換えると、環境地図作成システムのライダーLは、互いに異なる複数の時刻における物体情報を検出する。したがって、互いに異なる複数の時刻における物体情報から、互いに異なる複数の時刻における状態量が算出される。あるいは、環境地図作成システムを搭載した移動体が一定の場所を複数回移動した場合にも、互いに異なる複数の時刻における物体情報が検出され、したがって互いに異なる複数の時刻における状態量が算出される。図8A、図8B、及び図8Cには、互いに異なる複数の時刻における、或る位置の状態量の種々の例が示されている。
環境地図情報Mの作成例では、状態量の単位時間当たりの変化量が算出され、状態量の単位時間当たりの変化量に基づいて状態量変化性が算出される。すなわち、図8Aに示される例では、同一の時間幅dtにおける状態量の変化量(絶対値)dSQ1,dSQ2,…が算出される。この場合の時間幅dtは、例えば、状態量の検出間隔に等しい。なお、図8Aに示される例では、連続した時間幅dtにおいて状態量の変化量dSQ1,dSQ2,…がそれぞれ算出されるけれども、別の例では、不連続の時間幅dtにおいて状態量の変化量がそれぞれ算出される。あるいは、図8Bに示される例では、互いに異なる複数の時間幅dt1,dt2,…における状態量の変化量(絶対値)dSQ1,dSQ2,…がそれぞれ算出される。異なる時間幅は例えば、秒、分、日、年といったオーダーである。次いで、状態量の単位時間当たりの変化量dSQ1/dt1,dSQ2/dt2,…が順次算出される。なお、図8Bに示される例では、連続した時間幅dt1,dt2,…において状態量の変化量dSQ1,dSQ2,…がそれぞれ算出されるけれども、別の例では、不連続の時間幅において状態量の変化量がそれぞれ算出される。次いで、状態量の単位時間当たりの変化量dSQ1/dt1,dSQ2/dt2,…を単純平均又は加重平均することにより、状態量変化性が算出される。加重平均が用いられる場合、一例では、検出時期がより新しい状態量の単位時間当たりの変化量dSQ/dtがより大きく重み付けされ、検出時期がより古い状態量の単位時間当たりの変化量dSQ/dtがより小さく重み付けされる。別の例では、検出時期がより新しい状態量の単位時間当たりの変化量dSQ/dtがより小さく重み付けされ、検出時期がより古い状態量の単位時間当たりの変化量dSQ/dtがより大きく重み付けされる。このような状態量変化性の算出が複数の位置についてそれぞれ行われる。
環境地図情報Mの別の作成例(図示しない)では、時間の関数としての複数の状態量がフーリエ変換され、その結果から状態量変化性が算出される。具体的には、一例では、あらかじめ定められたスペクトル(周波数)の強度が状態量変化性として算出される。別の例では、種々のスペクトルの強度を単純平均又は加重平均することにより状態量変化性が算出される。
一方、環境地図情報Mの作成例では、状態量代表値は、互いに異なる複数の時刻において検出された当該或る位置の状態量に基づいて算出される。一例では、或る位置の状態量代表値は、互いに異なる複数の時刻における当該或る位置の状態量のうち、最新のものに設定される。このようにすると、或る位置の状態量代表値は、当該或る位置の最新の状態を表すことになる。別の例では、或る位置の状態量代表値は、互いに異なる複数の時刻における当該或る位置の状態量を単純平均又は加重平均することにより算出される。このようにすると、或る位置の状態量が一時的に変わったとしても、状態量代表値により、当該位置の状態を正確に表すことができる。
次いで、状態量代表値がそれぞれ対応する位置情報と関連付けられて環境地図用の記憶装置内に記憶される。また、状態量変化性がそれぞれ対応する位置情報と関連付けられて環境地図用の記憶装置内に記憶される。このようにして環境地図情報Mが作成される。
このように状態量代表値及び状態量変化性が位置情報と関連付けられているので、位置情報を指定すると、環境地図情報Mから、対応する位置の状態量代表値及び状態量変化性がわかる。なお、本発明による第1実施例では、環境地図情報Mは、三次元空間内の位置の位置情報、状態量代表値、及び状態量変化性を有するので、三次元地図である。また、本発明による第1実施例では、位置情報は絶対位置情報である。別の実施例(図示しない)では、位置情報はあらかじめ定められた特定の位置に対する相対位置情報である。
このようにして作成された環境地図情報Mから、次のことがわかる。すなわち、或る位置の、物体存在確率により表される状態量が大きく、状態量変化性が低い場合には、当該位置は、静的物体(例えば、建物、道路面など)、又は、静止している動的物体(例えば、他車両、歩行者など)もしくは準静的物体(例えば、立て看板、ゴミ箱、樹木の枝など)により占有されている。あるいは、当該位置が動的物体又は準静的物体により占有されている占有状態と、当該位置が動的物体又は準静的物体により占有されていない非占有状態とが比較的低い頻度で切り換わると共に、占有状態の時間が比較的長い。一方、或る位置の状態量が小さく状態量変化性が低い場合には、当該位置には、何も存在していない。そのような位置の具体例は、池の上方空間などである。或る位置の状態量が大きく状態量変化性が高い場合には、当該位置では占有状態と非占有状態とが比較的高い頻度で切り換わると共に、占有状態の時間が比較的長い。そのような位置の具体例は、交通量が比較的多い道路などである。或る位置の状態量が小さく状態量変化性が高い場合には、当該位置では占有状態と非占有状態とが比較的高い頻度で切り換わると共に、非占有状態の時間が比較的長い。そのような位置の具体例は、交通量が比較的少ない(ゼロではない)道路などである。
すなわち、本発明による第1実施例の環境地図情報Mには、或る位置における物体又は物体の存在の有無に関する情報だけでなく、当該位置がどのような状況にあるかの情報も含まれている。したがって、空間内の状況をより正確に表すことができる。
なお、本発明による第1実施例では、環境地図作成システムを搭載した移動体は、車両Vとは別の移動体である。別の実施例(図示しない)では、環境地図作成システムを搭載した移動体は、車両Vである。すなわち、車両Vにおいて環境地図情報Mが作成され、環境地図記憶装置6内に記憶される。この場合、車両Vの外部センサ1及びGPS受信部2は、環境地図作成システムの環境検出装置を構成する。
また、上述した本発明による第1実施例では、或る位置の状態量は当該或る位置に物体が存在する確率により表される。別の実施例(図示しない)では、或る位置の状態量は、或る位置に存在する物体の色又は輝度値により表される。この場合、例えば、信号機のランプのうちどのランプが点灯しているかを把握することができる。この別の実施例では、状態量が物体の色により表わされる場合には、物体の色は、外部センサ1のカメラSO3としてのカラーカメラにより検出される。一方、状態量が物体の輝度値により表わされる場合には、物体の輝度値は、外部センサ1のライダーSO1、レーダーSO2、又は、カラーもしくはモノクロカメラSO3により検出される。すなわち、ライダーSO1から発射されたレーザー光が物体に反射したときに得られる反射光の強度は当該物体の輝度値を表している。同様に、レーダーSO2の反射波強度は物体の輝度値を表している。したがって、反射光強度又は反射波強度を検出することにより、物体の輝度値が検出される。なお、状態量が物体の色により表される場合、状態量は、例えばRGBモデルを用いて数値化される。
一方、上述した本発明による第1実施例では、1つの位置情報に1つの状態量変化性が関連付けられる。別の実施例(図示しない)では、1つの位置情報に複数の状態量変化性が関連付けられ、したがって環境地図情報Mは複数の状態量変化性を有する。この場合、一例では、図8Bに示されるような、互いに異なる複数の時間幅における状態量の変化量に基づいて、複数の状態量変化性がそれぞれ算出される。別の例では、状態量をフーリエ変換することにより得られる複数のスペクトルの強度に基づいて、複数の状態量変化性が算出される。
上述したように、停止適合領域決定部14は、環境地図情報Mに基づいて、停止適合領域を決定する。本発明による第1実施例では、状態量代表値があらかじめ定められた設定代表値よりも小さくかつ状態量変化性があらかじめ定められた設定変化性よりも低い第1の領域のうち、状態量代表値が設定代表値よりも大きくかつ状態量変化性が設定変化性よりも低い第2の領域に隣接する領域が、停止適合領域に決定される。
上述の説明からわかるように、状態量代表値が小さくかつ状態量変化性が低い第1の領域には、物体が存在していない。したがって、第1の領域に車両Vを停止させることができる。一方、状態量代表値が大きくかつ状態量変化性が低い第2の領域には、例えば建物が存在している。このため、第2の領域の状況は安定している。これに対して、状態量変化性が高い領域及びその周辺では、状況が不安定であるおそれがある。
そうすると、第2の領域に隣接する第1の領域は、車両Vの停止のために比較的安全な場所であると考えられる。そこで、本発明による第1実施例では、第2の領域に隣接する第1の領域が停止適合領域に決定される。その結果、停止適合領域をより正確に決定することができる。
なお、当然のことながら、停止適合領域は、車両Vの道路面への投影面積よりも大きな面積を有する必要がある。
次に、図9A及び図9Bを参照して、停止適合領域の決定方法を更に説明する。図9Aは、或る場所の平面地図を示している。図9Aにおいて、PLは植栽、BLは建物、PKは駐車場、RWは車道、RSは路肩、LMは車線、及びEMは車道外側線、をそれぞれ示している。
図9Bは、図9Aに示される場所の種々の領域における状態量代表値及び状態量変化性の傾向を表している。すなわち、植栽PLの領域では、状態量代表値は設定代表値よりも大きく、状態量変化性は設定変化性よりも高い。図9Bではこの領域が「LL」でもって示される。一方、建物BLの領域では、状態量代表値は設定代表値よりも大きく、状態量変化性は設定変化性よりも低い。図9Bではこの領域が「LS」でもって示される。駐車場PKの領域では、状態量代表値は設定代表値よりも小さく、状態量変化性は設定変化性よりも高い。図9Bではこの領域が「SL」でもって示される。車道RWの領域では、状態量代表値は設定代表値よりも小さく、状態量変化性は設定変化性よりも高い。図9Bではこの領域が「SL」でもって示される。
更に、路肩RSの領域のうち植栽PLに隣接する部分では、状態量代表値は設定代表値よりも小さく、状態量変化性は設定変化性よりも高い。図9Bではこの領域が「SL」でもって示される。路肩RSの領域のうち建物BLに隣接する部分では、状態量代表値は設定代表値よりも小さく、状態量変化性は設定変化性よりも低い。図9Bではこの領域が「SS」でもって示される。路肩RSの領域のうち駐車場に隣接する部分では、状態量代表値は設定代表値よりも小さく、状態量変化性は設定変化性よりも高い。駐車場PKと車道RWとの間で車両の往来があるからである。図9Bではこの領域が「SL」でもって示される。
したがって、図9Bに示される例では、SSで示される領域が上述の第1の領域R1であり、LSで示される領域が上述の第2の領域R2である。このため、第2の領域R2に隣接する第1の領域R1が停止適合領域STに決定される。
上述したように、本発明による第1実施例では、停止要求判定部13から車両Vの停止要求が出力されたときには、進路生成部12cは、停止適合領域決定部14が決定した停止適合領域ST内に車両Vが停止するように、進路Pを生成する。
停止適合領域決定部14が1つの停止適合領域STを決定したときには、決定された停止適合領域ST内に車両Vが停止するように進路Pが生成される。一方、停止適合領域決定部14が複数の停止適合領域STを決定したときには、複数の停止適合領域STから1つの停止適合領域が選択され、選択された停止適合領域ST内に車両が停止するように進路Pが生成される。
この場合の停止適合領域STの選択は、本発明による第1実施例では、車両Vの現在位置から停止適合領域STまでの距離に基づいて行われる。例えば、車両Vの現在位置から最も近い停止適合領域STが選択される。
図10には、停止適合領域決定部14により決定された複数の停止適合領域STX,STY,STZの一例が示されている。図10に示される例では、停止適合領域STX,STY,STZは、車両Vの現在位置からの距離が互いに異なっている。具体的には、停止適合領域STXは車両Vの現在位置から最も近く、停止適合領域STYは2番目に近く、停止適合領域STZは車両Vの現在位置から最も遠い。
したがって、本発明による第1実施例では、車両Vの現在位置から最も近い停止適合領域STXが選択される。次いで、車両Vが停止適合領域STXに停止するように進路PXが生成される。なお、車両Vの現在位置から最も近い停止適合領域STXが車両Vの走行方向に対し後方に位置する場合には、車両VはUターンする場合もある。
ただし、車両Vを安全にかつ確実に停止するには、車両Vの前後方向の加速度又は減速度が一定の範囲内に維持され、車両Vの横方向の加速度又は減速度が一定の範囲内に維持されることが必要である。すなわち、車両Vの前後方向の加速度又は減速度が一定の範囲内に維持され、車両Vの横方向の加速度又は減速度が一定の範囲内に維持されるように、停止適合領域が選択される。したがって、本発明による第1実施例では、車両Vの安全で確実な停止を確保しつつ、車両Vの現在位置から最も近い停止適合領域STXが選択される。すなわち、図10の例において、車両Vを最も近い停止適合領域STXに安全にかつ確実に停止させることが困難な場合には、2番目に近い停止適合領域STYが選択され、車両Vが停止適合領域STYに停止するように進路PYが生成される。
なお、進路Pは、車両Vが周辺認識部12aにより認識された障害物や避けて移動するように、また、車両Vが他車両の走行の障害とならないように、生成される。
図11は、本発明による第1実施例の自動運転制御を実行するためのルーチンを示している。このルーチンは自動運転制御を行うべきときに繰り返し行われる。図11を参照すると、ステップ101では車両Vの停止要求が出力されているか否かが判別される。停止要求が出力されているときにはステップ102に進み、停止適合領域STが決定される。続くステップ103では、車両Vが停止適合領域STに停止するように進路Pが生成される。次いで、ステップ105に進む。これに対し、車両Vの停止要求が出力されていないときにはステップ101からステップ104に進み、通常の進路Pが生成される。次いでステップ105に進む。ステップ105では車両Vの移動制御が実行される。
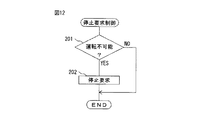
図12は、本発明による第1実施例の停止要求制御を実行するためのルーチンを示している。このルーチンは自動運転制御を行うべきときに繰り返し行われる。図12を参照すると、ステップ201では、ドライバがマニュアル運転を行うことができない状態にあるか否かが判別される。ドライバがマニュアル運転を行うことができない状態にあるときには次いでステップ202に進み、車両Vの停止要求が出力される。これに対し、ドライバがマニュアル運転を行うことができない状態にないときには、車両Vの停止要求を出力することなく、処理サイクルを終了する。
次に、本発明による第2実施例を説明する。以下では、主として、本発明による第1実施例との相違点について説明する。
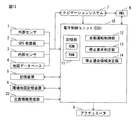
図13は本発明による第2実施例の移動体の自動運転制御システムのブロック図を示している。図13を参照すると、本発明による第2実施例の電子制御ユニット10は、災害情報受信部22を備える。災害情報受信部22は、例えばインターネットのような通信網を介して、災害情報を受信するように構成されている。災害情報は、火災、地震、津波等の災害が発生したときに、当該災害の発生地を表す情報と共に、出力される。
本発明による第2実施例では、停止要求判定部13は、車両Vの現在位置から一定距離以内で発生した災害に関する災害情報を受信したときに、車両Vの停止要求を出力する。これに対し、災害情報を受信しないとき、又は、災害情報を受信したとしても災害の発生地が車両Vの現在位置から遠いときには、車両Vの停止要求は出力されない。
本発明による第2実施例でも、停止要求判定部13から車両Vの停止要求が出力されると、停止適合領域決定部14は、環境地図記憶装置6内の環境地図情報に基づいて、停止適合領域を決定する。次いで、進路生成部12cは、車両Vが停止適合領域内に停止するように進路Pを生成する。次いで、移動制御部12dは、車両Vが進路Pに沿って移動するように車両Vを制御する。
本発明による第2実施例でも、車両Vの安全でかつ確実な停止を確保しつつ、車両Vの現在位置から最も近い停止適合領域STに車両Vが停止するように進路Pが生成される。
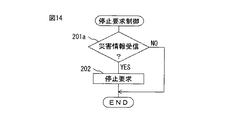
図14は、本発明による第2実施例の停止要求制御を実行するためのルーチンを示している。このルーチンは自動運転制御を行うべきときに繰り返し行われる。図14を参照すると、ステップ201aでは、車両Vの現在位置から一定距離以内で発生した災害に関する災害情報を受信したか否かが判別される。当該災害情報を受信したときには次いでステップ202に進み、車両Vの停止要求が出力される。これに対し、当該災害情報を受信していないときには、車両Vの停止要求を出力することなく、処理サイクルを終了する。
次に、本発明による第3実施例を説明する。以下では、主として、本発明による第1実施例との相違点について説明する。
図16は本発明による第3実施例の移動体の自動運転制御システムのブロック図を示している。図16を参照すると、本発明による第3実施例の電子制御ユニット10は、ドライバ指示入力部23を備える。ドライバ指示入力部23は、ドライバからの車両停止指示と、車両停止の緊急度とが入力されるように構成されている。すなわち、ドライバが車両Vの自動停止を希望するときには、ドライバはドライバ指示入力部23により、車両停止指示を入力すると共に、車両停止の緊急度を入力する。このために、ドライバ指示入力部23は、例えば、ボタン、ダイヤル、タッチパネル、音声認識装置(マイク)などを備える。なお、本発明による第3実施例では、車両停止の緊急度は、連続的又は段階的に変化する形で入力される。
本発明による第3実施例でも、状態量代表値があらかじめ定められた設定代表値よりも小さくかつ状態量変化性があらかじめ定められた設定変化性よりも低い第1の領域のうち、状態量代表値が設定代表値よりも大きくかつ状態量変化性が設定変化性よりも低い第2の領域に隣接する領域が、停止適合領域に決定される。本発明による第3実施例では更に、車両停止の緊急度に基づいて設定変化性が設定される。具体的には、車両停止の緊急度が高いときには、車両停止の緊急度が低いときに比べて、設定変化性が高く設定される。このようにすると、車両停止の緊急度が高いときに、車両停止の緊急度が低いときに比べて、上述の第1の領域となる領域の数が増加しうるので、決定される停止適合領域の数が増加しうる。したがって、車両停止の緊急度が高いときに、停止適合領域を比較的容易に見付けることができ、したがって車両Vを比較的速やかに停止させることができる。
すなわち、図16に示される例において、ドライバから車両停止指示及び車両停止の緊急度が入力されると共に、入力された車両停止の緊急度が低いときに、決定された停止適合領域は領域STZのみであるとすると、車両Vが停止適合領域STZに停止するように進路PZが生成される。ドライバから車両停止指示及び車両停止の緊急度が入力されると共に、入力された車両停止の緊急度が中程度のときに、決定された停止適合領域が領域STZ,STYであるとすると、この場合には、車両Vの現在位置から最もに近い停止適合領域STYが選択され、車両Vが停止適合領域STYに停止するように進路PYが生成される。ドライバから車両停止指示及び車両停止の緊急度が入力されると共に、入力された車両停止の緊急度が高いときに、決定された停止適合領域は領域STZ,STY,STXであるとすると、この場合には、車両Vの現在位置から最も近い停止適合領域STXが選択され、車両Vが停止適合領域STXに停止するように進路PXが生成される。このように、ドライバの希望に沿った場所に車両Vが自動的に停止される。
別の実施例(図示しない)では、車両停止の緊急度が低いときには、状態量代表値が設定代表値よりも小さくかつ状態量変化性が比較的低い第1の設定変化性よりも低い領域が第1の領域に設定され、車両停止の緊急度が高いときには、状態量代表値が設定代表値よりも小さくかつ状態量変化性が比較的高い第2の設定変化性よりも低い領域が第1の領域に設定される。
図17は、本発明による第3実施例の停止要求制御を実行するためのルーチンを示している。このルーチンは自動運転制御を行うべきときに繰り返し行われる。図17を参照すると、ステップ201bでは、ドライバから車両停止指示が入力されたか否かが判別される。車両停止指示が入力されたときには次いでステップ202に進み、車両Vの停止要求が出力される。これに対し、車両停止指示が入力されていないときには、車両Vの停止要求を出力することなく、処理サイクルを終了する。
これまで述べてきた本発明による実施例を互いに組み合せることもできる。一例では、電子制御ユニット10は、ドライバ状態センサ21、災害情報受信部22、及びドライバ指示入力部23のうちの少なくとも2つを備える。
また、本発明による別の実施例(図示しない)では、本発明による第1実施例又は第2実施例において、車両停止の緊急度に基づいて設定変化性が設定される。具体的には、車両停止の緊急度が高いときには、車両停止の緊急度が低いときに比べて、設定変化性が高く設定される。このようにすると、車両停止の緊急度が高いときに、車両Vを速やかに停止させることができる。
これまで述べてきた本発明による実施例では、上述したように、車両Vの前後方向の加速度又は減速度が一定の範囲内に維持され、車両Vの横方向の加速度又は減速度が一定の範囲内に維持されるように、停止適合領域が選択される。本発明による別の実施例(図示しない)では、車両停止の緊急度が高いときには、車両停止の緊急度が低いときに比べて、これらの加減速範囲が拡大される。その結果、車両停止の緊急度が高いときには、車両Vをより近い停止適合領域に停止させることが可能となる。