WO2023054157A1 - 形状可変ミラーおよびx線装置 - Google Patents
形状可変ミラーおよびx線装置 Download PDFInfo
- Publication number
- WO2023054157A1 WO2023054157A1 PCT/JP2022/035337 JP2022035337W WO2023054157A1 WO 2023054157 A1 WO2023054157 A1 WO 2023054157A1 JP 2022035337 W JP2022035337 W JP 2022035337W WO 2023054157 A1 WO2023054157 A1 WO 2023054157A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- deformable mirror
- substrate
- mirror according
- ray
- mirror
- Prior art date
Links
Images








Classifications
-
- G—PHYSICS
- G21—NUCLEAR PHYSICS; NUCLEAR ENGINEERING
- G21K—TECHNIQUES FOR HANDLING PARTICLES OR IONISING RADIATION NOT OTHERWISE PROVIDED FOR; IRRADIATION DEVICES; GAMMA RAY OR X-RAY MICROSCOPES
- G21K1/00—Arrangements for handling particles or ionising radiation, e.g. focusing or moderating
- G21K1/06—Arrangements for handling particles or ionising radiation, e.g. focusing or moderating using diffraction, refraction or reflection, e.g. monochromators
- G21K1/067—Arrangements for handling particles or ionising radiation, e.g. focusing or moderating using diffraction, refraction or reflection, e.g. monochromators using surface reflection, e.g. grazing incidence mirrors, gratings
-
- G—PHYSICS
- G21—NUCLEAR PHYSICS; NUCLEAR ENGINEERING
- G21K—TECHNIQUES FOR HANDLING PARTICLES OR IONISING RADIATION NOT OTHERWISE PROVIDED FOR; IRRADIATION DEVICES; GAMMA RAY OR X-RAY MICROSCOPES
- G21K5/00—Irradiation devices
- G21K5/10—Irradiation devices with provision for relative movement of beam source and object to be irradiated
-
- G—PHYSICS
- G21—NUCLEAR PHYSICS; NUCLEAR ENGINEERING
- G21K—TECHNIQUES FOR HANDLING PARTICLES OR IONISING RADIATION NOT OTHERWISE PROVIDED FOR; IRRADIATION DEVICES; GAMMA RAY OR X-RAY MICROSCOPES
- G21K5/00—Irradiation devices
- G21K5/08—Holders for targets or for other objects to be irradiated
-
- G—PHYSICS
- G21—NUCLEAR PHYSICS; NUCLEAR ENGINEERING
- G21K—TECHNIQUES FOR HANDLING PARTICLES OR IONISING RADIATION NOT OTHERWISE PROVIDED FOR; IRRADIATION DEVICES; GAMMA RAY OR X-RAY MICROSCOPES
- G21K7/00—Gamma- or X-ray microscopes
-
- G—PHYSICS
- G21—NUCLEAR PHYSICS; NUCLEAR ENGINEERING
- G21K—TECHNIQUES FOR HANDLING PARTICLES OR IONISING RADIATION NOT OTHERWISE PROVIDED FOR; IRRADIATION DEVICES; GAMMA RAY OR X-RAY MICROSCOPES
- G21K2201/00—Arrangements for handling radiation or particles
- G21K2201/06—Arrangements for handling radiation or particles using diffractive, refractive or reflecting elements
- G21K2201/064—Arrangements for handling radiation or particles using diffractive, refractive or reflecting elements having a curved surface
-
- G—PHYSICS
- G21—NUCLEAR PHYSICS; NUCLEAR ENGINEERING
- G21K—TECHNIQUES FOR HANDLING PARTICLES OR IONISING RADIATION NOT OTHERWISE PROVIDED FOR; IRRADIATION DEVICES; GAMMA RAY OR X-RAY MICROSCOPES
- G21K2201/00—Arrangements for handling radiation or particles
- G21K2201/06—Arrangements for handling radiation or particles using diffractive, refractive or reflecting elements
- G21K2201/067—Construction details
Definitions
- the present disclosure relates to deformable mirrors and x-ray devices.
- X-ray analysis technology is widely used in academia and industry. In recent years, the development of X-ray microscopes has progressed rapidly, and a resolution of 50 nm or less has been reported. Since X-rays have extremely short wavelengths compared to visible light, they are expected to achieve a resolution of 1 nm or less in principle. In order to further improve the resolution of X-ray microscopes, it is essential to improve the performance of X-ray optical systems that focus or image X-rays.
- Optical elements used in X-ray optical systems include compound refraction lenses that use refraction, Fresnel zone plates that use diffraction, and grazing incidence total reflection mirrors that use reflection.
- the grazing-incidence total reflection mirror has the advantages of high utilization efficiency of X-rays and little chromatic aberration.
- AKB Advanced Kirkpatrick-Baez
- a shape-variable mirror in which a piezoelectric element is attached to the total reflection mirror and the shape of the reflecting surface is controlled by the amount of deformation of the piezoelectric element (for example, patent Reference 2).
- the shape accuracy required for the reflecting surface of the X-ray mirror is extremely strict. For example, a shape accuracy of about 1 nm is required for a mirror size of about 100 mm. This is because the wavelength of X-rays is much shorter than that of visible light. Achieving such shape accuracy is not easy even with the application of cutting-edge ultra-precision processing technology. The manufacture of mirrors is very time consuming and costly.
- the present disclosure has been made in view of these problems, and one of its exemplary purposes is to provide a technique for precisely adjusting the shape of the reflecting surface of an X-ray mirror.
- a deformable mirror has a first surface and a second surface opposite to the first surface, a first substrate made of a piezoelectric material, provided on the first surface, and receiving X-rays.
- a reflective electrode having a reflective surface on which light is obliquely incident; a plurality of control electrodes arranged at intervals in a predetermined direction on the second surface; and a power source for applying a voltage between the reflective electrode and the plurality of control electrodes.
- An X-ray apparatus includes an X-ray optical system including a deformable mirror according to one aspect of the present disclosure, and an X-ray detection unit that detects X-rays emitted from the X-ray optical system.
- An X-ray apparatus includes an X-ray optical system including a deformable mirror according to one aspect of the present disclosure, and a sample holder that holds a sample irradiated with X-rays emitted from the X-ray optical system.
- the reflecting surface of the X-ray mirror can be precisely adjusted.
- FIG. 1 is a cross-sectional view schematically showing the configuration of a deformable mirror according to an embodiment
- FIG. 1 is a top view schematically showing the configuration of a deformable mirror according to an embodiment
- FIG. 4 is a graph showing an example of a deformation amount of a reflecting surface of a deformable mirror
- 7 is a graph showing an example of the relationship between the voltage applied to the deformable mirror and the amount of deformation
- FIG. 11 is a cross-sectional view schematically showing the configuration of a deformable mirror according to a modification
- FIG. 11 is a cross-sectional view schematically showing the configuration of a deformable mirror according to a modification
- FIG. 11 is a cross-sectional view schematically showing the configuration of a deformable mirror according to a modification
- 4 is a side view schematically showing a method of supporting a deformable mirror; 4 is a graph showing the temporal stability of the deformable mirror; 9A and 9B are graphs showing an example of the relationship between the voltage applied to the deformable mirror and the amount of deformation. 4 is a graph showing an example of shape error of a reflecting surface of a deformable mirror; 1 is a perspective view schematically showing the configuration of an X-ray microscope according to an embodiment; FIG.
- the present disclosure relates to an X-ray mirror that reflects X-rays, and to a deformable mirror that variably controls the shape of a reflecting surface using a piezoelectric material.
- An X-ray optical system for condensing or imaging X-rays uses a curved mirror having a concave or convex reflecting surface.
- the shape accuracy of the reflecting surface required for X-ray optical systems is about 1 nm (2 nm at PV (Peak-to-Valley)), which is not easy to achieve even with the application of cutting-edge ultra-precision processing technology. .
- the shape of the reflective surface finished with a shape accuracy of 2 nm to 5 nm (4 nm to 10 nm in PV) is variably controlled, and a combination of processing and deformation is performed.
- the purpose is to achieve a shape accuracy of 1 nm by According to the present disclosure, it is possible to reduce the processing accuracy of the reflecting surface, thereby reducing the period and cost required for manufacturing the curved mirror.
- the piezoelectric material for deforming the reflective surface is a piezoelectric unit such as lithium niobate (LN) or lithium tantalate (LT) instead of a piezoelectric ceramic material such as lead zirconate titanate (PZT).
- LN lithium niobate
- LT lithium tantalate
- PZT lead zirconate titanate
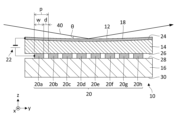
- FIG. 1 is a cross-sectional view schematically showing the configuration of a deformable mirror 10 according to an embodiment.
- the deformable mirror 10 has a reflecting surface 12 on which the X-rays 40 obliquely enter, and is configured such that the shape of the reflecting surface 12 is variable.
- the surface roughness (Rms) of the reflecting surface 12 is extremely small, for example 0.5 nm or less, preferably 0.2 nm or less.
- the angle ⁇ between the optical axis of the X-ray 40 and the reflecting surface 12 is very small, for example, about 1 to 10 milliradians (mrad).
- the deformable mirror 10 includes a first substrate 14, a second substrate 16, a reflective electrode 18, and a plurality of control electrodes 20a, 20b, 20c, 20d, 20e, 20f, 20g, and 20h (collectively called control electrodes 20). ) and a power source 22 .
- the direction orthogonal to both the incident optical axis and the reflected optical axis of the X-rays 40 incident and reflected by the deformable mirror 10 is defined as the x direction.
- the thickness direction of the first substrate 14 and the second substrate 16 is the z-direction, and the direction orthogonal to both the x-direction and the z-direction is the y-direction. Note that the illustrated coordinate axes are set to aid understanding of the description, and do not limit the orientation of the deformable mirror 10 during use.
- the first substrate 14 is made of a piezoelectric material, for example, a piezoelectric single crystal material such as lithium niobate (LN) or lithium tantalate (LT).
- the first substrate 14 has a first side 24 and a second side 26 opposite the first side 24 .
- a reflective electrode 18 is provided on the first surface 24, and a plurality of control electrodes 20a to 20h are provided on the second surface 26.
- the first substrate 14 deforms according to the voltage applied between the reflective electrode 18 and the plurality of control electrodes 20a-20h.
- the first substrate 14 expands and contracts in the thickness direction (z direction) according to the voltage applied in the thickness direction (z direction), and the thickness (height) from the second surface 26 to the first surface 24 changes.
- the thickness of the first substrate 14 is, for example, 0.1 mm or more and 10 mm or less, preferably 0.2 mm or more and 2 mm or less.
- the first surface 24 is configured to have shape accuracy and surface roughness equivalent to those of the reflecting surface 12 .
- the shape accuracy (PV) of the first surface 24 is, for example, 10 nm or less, preferably 2 nm or more and 5 nm or less.
- the surface roughness (Rms) of the first surface 24 is, for example, 0.5 nm or less, preferably 0.05 nm or more and 0.2 nm or less.
- the shape accuracy and surface roughness of the first surface 24 can be achieved by applying known precision processing such as EEM (Elastic Emission Machining) after rough processing such as cutting and mechanical polishing.
- the shape of the first surface 24 can be measured by a pencil beam method using X-rays, a visible light interferometer, an X-ray interferometer, an autocollimator, or the like.
- the first surface 24 is, for example, an arcuate, elliptical, hyperbolic, or parabolic convex or concave curved surface with curvature in only one direction (eg, the y direction).
- the first surface 24 is a concave curved surface.
- the first surface 24 may be a flat surface or a curved surface having curvatures in two directions (eg, x-direction and y-direction).
- the second surface 26 is, for example, a polished flat surface.
- the second substrate 16 is a member for supporting the first substrate 14.
- the second substrate 16 has a third surface 28 and a fourth surface 30 opposite the third surface 28 .
- the third surface 28 and the fourth surface 30 are, for example, polished flat surfaces.
- the third surface 28 is joined to the plurality of control electrodes 20a-20h and fixed to the first substrate 14 via the plurality of control electrodes 20a-20h.
- the fourth surface 30 is fixed to a jig or the like for positioning the deformable mirror 10 .
- the material of the second substrate 16 is not particularly limited, for example, single crystal materials such as silicon, crystal, and sapphire can be used.
- the material of the second substrate 16 may be the same piezoelectric material as the first substrate 14 or the same piezoelectric single crystal material as the first substrate 14 .
- the deformable mirror 10 does not need to include the second substrate 16 .
- the reflective electrode 18 is provided on the first surface 24 and has a reflective surface 12 on which the X-rays 40 obliquely enter.
- the reflective electrode 18 has a thickness of, for example, 10 nm or more and 100 nm or less, preferably 30 nm or more and 70 nm or less.
- the reflective electrode 18 is provided, for example, so as to cover the entire first surface 24 and have a uniform thickness over the entire first surface 24 . Since the reflective electrode 18 has a uniform thickness, the reflective surface 12 has a shape corresponding to the first surface 24 and has the same shape accuracy and surface roughness as the first surface 24 .
- the reflective electrode 18 may be composed of a metal thin film of a single material, or may be composed of a laminate of a plurality of metal thin films of different materials.
- the reflective electrode 18 may have, for example, an adhesive layer such as Cr or Ti in contact with the first surface 24 and a reflective layer such as Rh, Pt, Au formed on the adhesive layer.
- the reflective electrode 18 can be formed using a vapor deposition method or a sputtering method.
- the reflective surface 12 may be configured to function as a total reflection mirror based on the phenomenon of total reflection, or may be configured as a multilayer mirror utilizing Bragg reflection.
- the reflective electrode 18 includes a multilayer film in which a plurality of first layers made of a heavy element and a plurality of second layers made of a light element are alternately and periodically stacked. It's okay. Molybdenum (Mo), rhodium (Rh), tungsten (W), platinum (Pt) and the like can be used as heavy elements constituting the first layer, and beryllium (Be) and carbon as light elements constituting the second layer. (C), silicon (Si), or the like can be used.
- the number of laminated layers of the multilayer film is, for example, about 10 to 100.
- Each thickness of the first layer and the second layer is about 1 nm to 10 nm.
- the reflective electrode 18 may be configured as a so-called multilayer supermirror, and may be configured such that the periodic length of the multilayer film (total thickness of the first and second layers) varies in the depth direction. That is, at least one of the thickness of each of the plurality of first layers and the thickness of each of the plurality of second layers constituting the reflective layer of the multilayer film may differ depending on the position in the thickness direction.
- the reflective electrode 18 contains a conductive material, and preferably contains a highly conductive material.
- the metal material forming the reflective electrode 18 can impart electrical conductivity.
- the reflective electrode 18 is configured as a multilayer mirror, the multilayer mirror can have high conductivity by combining a conductive first layer (e.g., W) and a second layer (e.g., C). can be done.
- the multilayer mirror is made of a material with low conductivity
- the first layer is tungsten carbide (WC) and the second layer is boron carbide (B 4 C)
- the first substrate 14 By using a highly conductive metal material such as Cr as an adhesive layer between the first surface 24 of and the multilayer mirror, the reflective electrode 18 can be made conductive. That is, the conductivity of the adhesive layer may be higher than the conductivity of the reflective layer.
- the conductivity of the reflective layer is high, the conductivity of the adhesive layer may be lower than the conductivity of the reflective layer. That is, the conductivity of the reflective layer may be higher than the conductivity of the adhesive layer.
- the control electrode 20 is provided between the first substrate 14 and the second substrate 16 and joins the second surface 26 and the third surface 28 .
- a plurality of control electrodes 20a to 20h are arranged at intervals in a predetermined direction (eg, y direction).
- a width w of the plurality of control electrodes 20a to 20h in a predetermined direction (eg, y direction) is, for example, 0.5 mm or more and 10 mm or less, preferably 1 mm or more and 6 mm or less.
- a distance d between the plurality of control electrodes 20a to 20h in a predetermined direction (eg, y direction) is, for example, 0.1 mm or more and 5 mm or less, preferably 0.5 mm or more and 4 mm or less.
- a pitch p (sum of width w and interval d) of the plurality of control electrodes 20a to 20h in a predetermined direction is, for example, 1 mm or more and 15 mm or less, preferably 1.5 mm or more and 10 mm or less.
- the plurality of control electrodes 20a to 20h are configured, for example, so that the width w, spacing d, and pitch p in a predetermined direction (eg, y direction) are constant. At least one of the width w, spacing d and pitch p of each of the plurality of control electrodes 20a-20h may be configured to be different from each other. For example, when the angle ⁇ of the X-rays 40 obliquely incident on the reflecting surface 12 varies depending on the location in a predetermined direction (for example, the y direction), the effective pitch p ⁇ when viewed from the X-rays 40 is assumed to be constant. The pitch p of the plurality of control electrodes 20a to 20h may be made different from each other so that
- the control electrode 20 is made of a metal material, such as nickel (Ni), chromium (Cr), copper (Cu), silver (Ag), and gold (Au).
- the control electrode 20 is formed by forming a first metal film on the second surface 26 and forming a second metal film on the third surface 28 by, for example, a vapor deposition method or a sputtering method. It can be formed by joining metal films. Any method of bonding the first metal film and the second metal film can be used, and any metal bonding technique can be used. As an example, solid phase bonding techniques such as room temperature bonding and diffusion bonding can be used. Alternatively, a binder material such as a conductive adhesive or metal nanoparticles may be used to join the first metal film and the second metal film.
- the thickness of the control electrode 20 is not particularly limited, but is, for example, 100 nm or more and 1000 nm or less.
- a power supply 22 applies a DC voltage between the reflective electrode 18 and the control electrode 20 .
- the power supply 22 is connected to only one control electrode 20a in order to avoid complication of the drawing, but the power supply 22 is connected to each of the plurality of control electrodes 20a to 20h.
- the power supply 22 is configured to independently control the voltage applied to each of the plurality of control electrodes 20a-20h.
- the power supply 22 applies a variable DC voltage, for example, in the range of -1 kV to +1 kV.
- the power supply 22 individually variably controls the voltage applied to each of the plurality of control electrodes 20a to 20h, thereby controlling the amount of deformation of the first substrate 14 at the position corresponding to each of the plurality of control electrodes 20a to 20h,
- the shape of the reflecting surface 12 is variably controlled.
- FIG. 2 is a plan view schematically showing the configuration of the deformable mirror 10 according to the embodiment.
- FIG. 1 corresponds to the AA cross section of FIG.
- the first substrate 14 and the second substrate 16 have rectangular outlines that are long in the y direction and short in the x direction.
- the length Lx1 in the x direction of the first substrate 14 is larger than the beam size of the obliquely incident X-rays 40, and is, for example, 5 mm or more and 50 mm or less, for example, 10 mm or more and 30 mm or less.
- the length Ly of the first substrate 14 in the y direction is determined according to the beam size and angle ⁇ of the obliquely incident X-rays 40, and is, for example, 20 mm or more and 200 mm or less, for example, 50 mm or more and 150 mm or less.
- the x-direction length Lx2 of the second substrate 16 is greater than the x-direction length Lx1 of the first substrate 14, and is, for example, 10 mm or more and 100 mm or less.
- the y-direction length of the second substrate 16 is the same as the y-direction length Ly of the first substrate 14 .
- the length of the second substrate 16 in the y direction may be larger or smaller than the length Ly of the first substrate 14 in the y direction.
- Each of the plurality of control electrodes 20a to 20h is formed on the third surface 28 so as to extend in a strip shape in the x direction.
- the length in the x direction of the plurality of control electrodes 20a to 20h is longer than the length Lx1 in the x direction of the first substrate 14, and is the same as the length Lx2 in the x direction of the second substrate 16, for example.
- the length of the plurality of control electrodes 20a to 20h in the x direction may be smaller than the length Lx2 of the second substrate 16 in the x direction.
- Each of the plurality of control electrodes 20a to 20h is bonded to the first substrate 14 at a bonding region 32 indicated by a dashed line in the central portion of the first substrate 14 in FIG.
- the x-direction length Lx3 of the bonding region 32 is smaller than the x-direction length Lx1 of the first substrate 14 .
- the x-direction length Lx3 of the bonding region 32 is larger than the beam size of the obliquely incident X-rays 40 in the x direction, and is, for example, 3 mm or more and 30 mm or less, for example, 5 mm or more and 20 mm or less.
- the x-direction length Lx3 of the bonding region 32 may be the same as the x-direction length Lx1 of the first substrate 14 .
- FIG. 3 is a graph showing an example of the amount of deformation of the reflecting surface 12 of the deformable mirror 10.
- FIG. FIG. 3 is based on the height of the reflecting surface 12 when no voltage is applied to the plurality of control electrodes 20a to 20h, and the voltages applied to the plurality of control electrodes 20a to 20h are 100V, 200V, 300V, 400V and 500V.
- the amount of deformation of the reflective surface 12 is shown when .
- the voltages applied to the plurality of control electrodes 20a to 20h are alternately positive and negative in a predetermined direction (for example, the y direction). Negative voltages are applied to the control voltages 20b, 20d, 20f and 20h.
- the vertical axis of the graph is the deformation amount [nm] in the thickness direction (z direction), and the horizontal axis of the graph is the position [mm] in the predetermined direction (y direction).
- the width w of the plurality of control electrodes 20a to 20h in the y direction is set to 2 mm, and the interval d is set to 1 mm.
- the reflective surface 12 after deformation has convex portions and concave portions at intervals of about 3 mm, and the reflective surface 12 is formed so as to correspond to the positions of the plurality of control electrodes 20a to 20h arranged at a pitch of 3 mm. 12 can be transformed.
- the reflecting surface 12 can be deformed at a spatial frequency of 6 mm.
- the spatial frequency of 20 to 30 mm is the limit. Therefore, according to the present embodiment, shape control with a higher spatial frequency than in the conventional art is possible.
- the reflection surface 12 is formed at a spatial frequency of 3 mm. Can transform.
- the height difference between the convex portion and the concave portion is about 20 nm.
- the maximum value of deformation is small. However, the amount of deformation is sufficient to correct a shape error of about 5 nm (about 10 nm in PV).
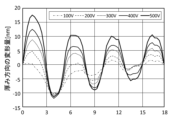
- FIG. 4 is a graph showing an example of the relationship between the voltage applied to the deformable mirror 10 and the amount of deformation. As shown in FIG. 4, there is a high degree of linearity between applied voltage and deformation. In addition, no hysteresis, which exists in piezoelectric ceramic materials such as PZT, is observed, and no drift is observed in which the amount of deformation changes over time even though the applied voltage is fixed. Therefore, according to the deformable mirror 10 of the present embodiment, the amount of deformation can be uniquely determined according to the applied voltage, and the shape of the reflecting surface 12 can be stably controlled with high reproducibility.
- the shape of the reflecting surface 12 can be variably controlled while the reflecting surface 12 is irradiated with the X-rays 40 . can be adjusted after the fact. For example, by measuring the shape of the reflecting surface 12 by a pencil beam method using X-rays, the shape of the reflecting surface 12 can be precisely measured and adjusted on the spot when the deformable mirror 10 is incorporated in the X-ray optical system. can run to
- FIG. 5 is a cross-sectional view schematically showing the configuration of a deformable mirror 10A according to a modification.
- This modification differs from the above-described embodiment in that the second substrate 16 is made of a piezoelectric material and a rear surface electrode 34 is provided on the fourth surface 30 of the second substrate 16 .
- the second substrate 16 is made deformable according to the applied voltage, and the second substrate 16 is deformed in the same manner as the first substrate 14, so that the difference in deformation amount between the first substrate 14 and the second substrate 16 is suppress unintended curvature of the reflecting surface 12 caused by
- This modified example will be described with a focus on differences from the above-described embodiment, and descriptions of common points will be omitted as appropriate.
- the deformable mirror 10A includes a first substrate 14, a second substrate 16, a reflective electrode 18, a plurality of control electrodes 20a-20h, a power source 22A, and a back surface electrode .
- the back electrode 34 is provided on the fourth surface 30 of the second substrate 16 .
- the back electrode 34 is provided, for example, so as to cover the entire fourth surface 30 .
- the back electrode 34 is made of a metal material such as nickel (Ni), chromium (Cr), copper (Cu), silver (Ag), and gold (Au).
- the back electrode 34 can be formed using a vapor deposition method or a sputtering method.
- the thickness of the back electrode 34 is not particularly limited, but is, for example, 10 nm or more and 1000 nm or less, preferably 30 nm or more and 200 nm or less.
- the power supply 22A applies a DC voltage between the reflective electrode 18 and the control electrode 20, and also applies a DC voltage between the back electrode 34 and the control electrode 20.
- the power supply 22A is connected so that the reflective electrode 18 and the back electrode 34 have a common potential.
- a second power supply that applies a DC voltage between the rear electrode 34 and the control electrode 20 is used separately from the first power supply that applies a DC voltage between the reflective electrode 18 and the control electrode 20. good too. That is, the first applied voltage between the reflective electrode 18 and the control electrode 20 and the second applied voltage between the back electrode 34 and the control electrode 20 may be individually controllable.
- the direction of the electric field applied to the first substrate 14 and the direction of the electric field applied to the second substrate 16 are upside down.
- a positive voltage is applied to the control electrode 20
- an electric field is applied to the first substrate 14 from the second surface 26 toward the first surface 24
- an electric field is applied to the second substrate 16 from the third surface 28 to the fourth surface 30 .
- the second substrate 16 is arranged such that the polarization direction is upside down with respect to the first substrate 14 .
- the deformation directions can be made the same when an electric field is applied to the first substrate 14 and the second substrate 16 in the upside down direction.
- the structure of the deformable mirror 10A can be made symmetrical in the thickness direction (for example, the z-direction) with respect to the control electrode 20, so that deformation of the reflection surface 12 due to temperature change can be more suitably suppressed.
- the amounts of deformation of the first substrate 14 and the second substrate 16 in the x-, y-, and z-directions can be made the same when the voltage is applied.
- the deformable mirror 10A from bending like a bimetal due to a difference between the amount of deformation of the first substrate 14 and the amount of deformation of the second substrate 16 .
- the shape of the reflecting surface 12 can be controlled more stably and with higher reproducibility.
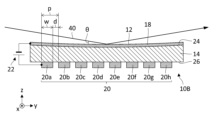
- FIG. 6 is a cross-sectional view schematically showing the configuration of a deformable mirror 10B according to a modification. This modification is obtained by removing the second substrate 16 from the deformable mirror 10 shown in FIG.
- the deformable mirror 10B includes a first substrate 14, a reflective electrode 18, a plurality of control electrodes 20a-20h, and a power source 22.
- FIG. The first substrate 14, the reflective electrode 18, the plurality of control electrodes 20a to 20h, and the power source 22 are configured in the same manner as in the above-described embodiments.
- FIG. 7 is a side view schematically showing a method of supporting the deformable mirror 10B.
- the deformable mirror 10B can be held by three-point support using three supports 50a, 50b, and 50c that are in point contact with the deformable mirror 10B.
- Support spheres 52a, 52b, and 52c are provided at the tips of the plurality of supports 50a to 50c, respectively, and each of the support spheres 52a to 52c makes point contact with the deformable mirror 10B.
- deformation of the deformable mirror 10B due to point contact can be predicted with high accuracy by simulation such as the finite element method.
- three points at which the plurality of supports 50a to 50c come into contact can be selected so that the shape-deformable mirror 10B deforms into a desired shape based on the simulation.
- the reflective surface 12 faces vertically upward, and the plurality of supports 50a to 50c contact the second surface 26 of the first substrate 14 or the control electrode 20 to form the deformable mirror 10B. support. Note that when the reflecting surface 12 faces downward in the vertical direction, that is, when the top and bottom of FIG. can do. Also, when the reflecting surface 12 faces laterally, the plurality of supports 50a to 50c can contact the side surfaces of the first substrate 14 to support the deformable mirror 10B.
- the support method using a plurality of supports 50a to 50c can also be applied to the deformable mirrors 10 and 10A shown in FIG. 1 or FIG.
- FIG. 8 is a graph showing the temporal stability of the deformable mirror 10B.
- FIG. 8 shows the wavefront shape of the X-ray 40 reflected by the deformable mirror 10B with a voltage of 500 V applied to any one of the plurality of control electrodes 20a to 20h.
- the energy of the obliquely incident X-ray 40 is 14.5 keV, and the deformable mirror 10B is used as the elliptical concave mirror in the Wolter type 3 mirror, which is a combination of an elliptical concave mirror and a hyperbolic convex mirror.
- Graph A shows 1 hour after voltage application
- graph B shows 4 hours after voltage application
- graph C shows 7 hours after voltage application. As shown in FIG.
- the temporal change in the shape of the reflecting surface of the deformable mirror 10B is extremely small, and the amount of temporal change in the wavefront during the measurement period is about 0.03 rad, which corresponds to a change in shape of 0.5 ⁇ . Equivalent to. Therefore, the shape of the deformable mirror 10B can be precisely and stably controlled over a long period of time when the deformable mirror 10B is used.
- FIG. 9(a) and (b) are graphs showing an example of the relationship between the voltage applied to the deformable mirror 10B and the amount of deformation.
- FIG. 9(a) shows the amount of deformation of the reflecting surface 12 with respect to the applied voltage, and it can be seen that the amount of deformation of the reflecting surface 12 changes linearly.
- FIG. 9(b) shows the hysteresis of the deformation amount of the reflecting surface 12 when the applied voltage is changed, and shows the difference between the plot of FIG. 9(a) and the approximate straight line.
- the hysteresis of the deformation amount of the reflecting surface 12 is extremely small, and is only about several percent of the deformation amount of the reflecting surface 12 . Therefore, the shape of the deformable mirror 10B can be precisely and simply controlled without worrying about hysteresis.
- FIG. 10 is a graph showing an example of the shape error of the reflecting surface of the deformable mirror 10B.
- Graph D shows shape errors before correction when no voltage is applied to the plurality of control electrodes 20a to 20h, and shows shape accuracy of about ⁇ 2 nm (about 4 nm in PV).
- Graph E shows shape errors after correction by applying voltages to a plurality of control electrodes 20a to 20h, and a shape accuracy of about ⁇ 0.5 nm (about 1 nm in PV) has been achieved.
- the energy of the X-rays 40 is 14.5 keV and the oblique incidence angle ⁇ of the X-rays 40 is about 4 mrad
- the shape accuracy required for the reflecting surface 12 is 0.76 nm or less in Rms.
- the post-correction shape accuracy shown by graph E is 0.24 nm in Rms, which is sufficient to achieve the required accuracy.
- wavefront correction can be achieved with accuracy exceeding the diffraction limit of the X-rays 40. For example, even if the energy of the X-rays 40 is 45 keV, the diffraction limit can be achieved.
- FIG. 11 is a perspective view schematically showing the configuration of the X-ray microscope 60 according to the embodiment.
- the X-ray microscope 60 is an example of an X-ray apparatus that uses X-rays, and has a so-called imaging type microscope configuration.
- the X-ray microscope 60 includes an illumination optical system 62 , a sample holder 64 , an imaging optical system 66 and an X-ray detector 68 .
- the X-ray microscope 60 is configured to irradiate a sample 88 with X-rays 92 generated by an X-ray source 90 and detect an enlarged image of the X-rays 96 transmitted through the sample 88 by an X-ray detector 68. .
- An X-ray source 90 generates X-rays 92 for observing the sample 88 .
- the type of the X-ray source 90 is not particularly limited, and an X-ray tube, a large synchrotron radiation facility such as Spring-8, an X-ray free electron laser, or the like can be used.
- the X-ray microscope 60 may include an X-ray source 90 if a compact device such as an X-ray tube is used as the X-ray source.
- the X-ray microscope 60 does not have to include the X-ray source 90 .
- the X-ray source 90 is configured to output hard X-rays of, for example, 2 keV or higher.
- the X-ray source 90 may generate monochromatic X-rays monochromatic to a specific wavelength, or may generate continuous X-rays (white X-rays) containing various wavelength components.
- the illumination optical system 62 is arranged between the X-ray source 90 and the sample holder 64 .
- Illumination optics 62 are configured to focus X-rays 92 from X-ray source 90 onto sample holder 64 .
- the illumination optical system 62 is composed of so-called KB (Kirkpatrick-Baez) mirrors and includes a horizontal concave mirror 70 and a vertical concave mirror 72 .
- the horizontal concave mirror 70 and the vertical concave mirror 72 are arranged so that the normal directions of their reflecting surfaces are orthogonal to each other.
- the reflecting surfaces of the horizontal concave mirror 70 and the vertical concave mirror 72 are, for example, elliptical concave curved surfaces having a focus at the position of the sample holder 64 .
- the illumination optical system 62 may be composed of four curved mirrors, similar to the imaging optical system 66, which will be described later.
- the sample holder 64 holds a sample 88 irradiated with the X-rays 94 emitted from the illumination optical system 62 .
- the sample holder 64 holds the sample 88 to be observed on the optical path of the X-rays 94 .
- the configuration of the sample holder 64 is not particularly limited, and any configuration for fixing the position of the sample 88 can be used according to the characteristics of the sample 88 .
- the sample holder 64 includes, for example, a stage device for adjusting the position of the sample 88 with respect to the optical path of the X-rays 94 .
- the imaging optical system 66 is arranged between the sample holder 64 and the X-ray detector 68 .
- the imaging optical system 66 is configured to image the X-rays 96 from the sample holder 64 onto the X-ray detector 68 .
- the imaging optical system 66 is a so-called AKB (Advanced Kirkpatrick-Baez) mirror optical system and includes four curved mirrors 74 , 76 , 78 and 80 .
- the imaging optical system 66 is configured to achieve an image magnification of, for example, about 100 times to 1,000 times.
- the imaging optical system 66 can be configured, for example, as a Wolter type 1 mirror combining a hyperbolic concave mirror and an elliptical concave mirror.
- the first curved mirror 74 is a horizontal hyperbolic concave mirror, and has, for example, a reflecting surface composed of a hyperbolic concave curved surface with a focal point at the position of the sample holder 64 .
- the second curved mirror 76 is a vertical hyperbolic concave mirror, and has a reflecting surface composed of, for example, a hyperbolic concave surface with a focal point at the position of the sample holder 64 .
- the third curved mirror 78 is a horizontal elliptical concave mirror, and is composed of, for example, an elliptical concave curved surface having a first focus at the position of the X-ray detector 68 and a second focus shared with the first curved mirror 74. It has a reflective surface that is
- the fourth curved mirror 80 is a vertical elliptical concave mirror, and is composed of, for example, an elliptical concave curved surface having a first focal point at the position of the X-ray detector 68 and a second focal point shared with the second curved mirror 76. It has a reflective surface that is
- curved mirrors 74 to 80 of a horizontal hyperbolic concave mirror, a vertical hyperbolic concave mirror, a horizontal elliptical concave mirror, and a vertical elliptical concave mirror are arranged from the sample holder 64 toward the X-ray detection unit 68 in this order.
- mirrors are arranged, the arrangement order is not limited to this.
- a horizontal hyperbolic concave mirror may be followed by a horizontal elliptical concave mirror, or a vertical hyperbolic concave mirror may be followed by a vertical elliptical concave mirror.
- the imaging optical system 66 can be configured as a Wolter type 3 mirror, which is a combination of an elliptical concave mirror and a hyperbolic convex mirror.
- the first curved mirror 74 is a horizontal elliptical concave mirror
- the second curved mirror 76 is a vertical elliptical concave mirror
- the third curved mirror 78 is a horizontal hyperbolic convex mirror
- the fourth curved mirror 80 is a vertical hyperbolic convex mirror.
- the X-ray detector 68 detects X-rays 98 emitted from the imaging optical system 66 .
- the X-ray detector 68 is, for example, an X-ray camera that detects a two-dimensional image of X-rays 98 .
- the configuration of the X-ray detection unit 68 is not particularly limited, for example, a direct conversion type or indirect conversion type image sensor (CCD or CMOS sensor) can be used.
- the X-ray detection unit 68 may include an optical element such as a lens for enlarging the visible light image converted by the scintillator and an image sensor for imaging the enlarged visible light image in order to further improve the resolution. good.
- At least one of the illumination optical system 62 and the imaging optical system 66 includes the deformable mirror 10, 10A or 10B according to the above embodiment or modification. At least one of the horizontal concave mirror 70 and the vertical concave mirror 72 that constitute the illumination optical system 62 may be configured by the deformable mirror 10, 10A or 10B.
- the deformable mirror 10, 10A or 10B may be applied only to the horizontal concave mirror 70, may be applied only to the vertical concave mirror 72, or may be applied to both the horizontal concave mirror 70 and the vertical concave mirror 72.
- At least one of the four curved mirrors 74 to 80 forming the imaging optical system 66 may be formed by the deformable mirror 10, 10A or 10B.
- the deformable mirror 10, 10A or 10B may be applied to any one, two or three of the four curved mirrors 74-80, or may be applied to all of them.
- the deformable mirror 10, 10A or 10B in at least one of the illumination optical system 62 and the imaging optical system 66, it is possible to improve the characteristics of the X-ray optical system while reducing the time and cost required for mirror manufacturing.
- the deformable mirror 10, 10A or 10B according to the present disclosure is preferably applied to the imaging optical system 66 that requires higher precision.
- FIG. The configuration of FIG. 11 is preferably applied to one or both of the first curved mirror 74, which is a horizontal hyperbolic concave mirror, and the second curved mirror 76, which is a vertical hyperbolic concave mirror.
- the performance of the X-ray microscope 60 can be improved more effectively.
- the X-ray microscope 60 may further include an X-ray spectrometer (not shown) arranged between the X-ray source 90 and the illumination optical system 62.
- the x-ray spectrograph is configured to monochromate x-rays 92 from x-ray source 90 .
- the X-ray spectrometer may be a crystal spectrometer such as a double crystal monochromator, and may be configured such that the X-ray wavelength is variable by changing the crystal angle.
- the X-ray microscope 60 can provide XAFS (X-ray Absorption Fine Structure) imaging by varying the X-ray wavelength. Since the X-ray microscope 60 is composed of an X-ray optical system with little chromatic aberration, it can provide a high-resolution (for example, 50 nm or less) XAFS image simply by changing the X-ray wavelength.
- the deformable mirror 10, 10A, or 10B according to the present disclosure can be applied to any X-ray apparatus, and is particularly applied to an X-ray optical system such as a condensing optical system or an imaging optical system included in the X-ray apparatus. be able to.
- X-ray apparatuses include the imaging X-ray microscope illustrated in FIG. 11, as well as a scanning X-ray microscope and an X-ray telescope.
- the scanning X-ray microscope includes a condensing optical system for condensing X-rays onto a sample holder, and at least one of the X-ray mirrors constituting the condensing optical system is the deformable mirror 10, 10A or 10B according to the present disclosure.
- the resolution is determined by the beam size of the X-rays collected by the collection optics.
- the deformable mirror 10, 10A, or 10B it is possible to improve the characteristics of the focusing optical system and improve the resolution of the scanning X-ray microscope.
- 11 can be used as a condensing optical system of the scanning X-ray microscope.
- 10A or 10B can be used.
- An AKB mirror optical system including four curved mirrors can also be used as the condensing optical system of the scanning X-ray microscope. can be used.
- the X-ray telescope includes an imaging optical system that forms an image of X-rays from a celestial body to be observed on an X-ray detection unit, and at least one of the X-ray mirrors that make up the imaging optical system has a variable shape according to the present disclosure. It may be mirror 10, 10A or 10B.
- the imaging optical system of the X-ray telescope for example, an AKB mirror optical system similar to the imaging optical system 66 of FIG. 11 can be used.
- the first curved mirror 74 and the second curved mirror 76 are parabolic concave mirrors
- the third curved mirror 78 and the fourth curved mirror 80 are hyperbolic concave mirrors.
- a Wolter 1 type imaging optical system can be used.
- a Wolter 3 imaging optical system may be used in which the first curved mirror 74 and the second curved mirror 76 are parabolic convex mirrors, and the third curved mirror 78 and the fourth curved mirror 80 are elliptical concave mirrors.
- the deformable mirror 10, 10A or 10B according to the present disclosure can be used for at least one of the four curved mirrors.
- the deformable mirror 10, 10A or 10B may be used as a wavefront compensating optical element in any X-ray apparatus.
- the reflecting surface 12 which is a substantially flat surface, is slightly deformed to, for example, have a shape opposite to the wavefront aberration of the obliquely incident X-rays 40, so that the incident X-rays 40 to compensate for the wavefront aberration of
- the X-rays whose wavefront aberration has been compensated by the deformable mirror 10, 10A or 10B may be further processed by X-ray optical elements such as lenses and mirrors, or may be irradiated onto the sample held by the sample holder. Alternatively, it may be detected by an X-ray detector.
- the reflecting surface of the X-ray mirror can be precisely adjusted.
- SYMBOLS 10 Deformable mirror, 12... Reflective surface, 14... First substrate, 16... Second substrate, 18... Reflective electrode, 20... Control electrode, 22... Power supply, 24... First surface, 26... Second surface, 28 ... 3rd surface, 30 ... 4th surface, 40 ... X-ray.
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- High Energy & Nuclear Physics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Optical Elements Other Than Lenses (AREA)
- Analysing Materials By The Use Of Radiation (AREA)
Abstract
Description
本出願は、2021年10月1日に出願された日本国特許出願2021-163085号の優先権を主張し、その全体が参照により本書に組み込まれる。
本開示は、形状可変ミラーおよびX線装置に関する。
Claims (20)
- 第1面と、前記第1面とは反対側の第2面とを有し、圧電材料からなる第1基板と、
前記第1面に設けられ、X線が斜入射する反射面を有する反射電極と、
前記第2面において所定方向に間隔をあけて並べられる複数の制御電極と、
前記反射電極と前記複数の制御電極の間に電圧を印加する電源と、を備える形状可変ミラー。 - 前記圧電材料は、圧電単結晶材料である、請求項1に記載の形状可変ミラー。
- 前記圧電単結晶材料は、ニオブ酸リチウム(LN)またはタンタル酸リチウム(LT)である、請求項2に記載の形状可変ミラー。
- 前記反射電極は、金属材料から構成される反射層を備える、請求項1から3のいずれか一項に記載の形状可変ミラー。
- 前記反射層は、ニッケル(Ni)、クロム(Cr)、ロジウム(Rh)、白金(Pt)および金(Au)を備える群から選択される少なくとも一つを含む、請求項4に記載の形状可変ミラー。
- 前記反射層は、10nm以上100nm以下の厚さを有する、請求項4または5のいずれか一項に記載の形状可変ミラー。
- 前記反射電極は、第1材料から構成される複数の第1層と、前記第1材料とは異なる第2材料から複数の第2層とを交互に積層させた多層膜から構成される反射層を備える、請求項1から3のいずれか一項に記載の形状可変ミラー。
- 前記第1材料は、モリブデン(Mo)、ロジウム(Rh)、タングステン(W)および白金(Pt)を備える群から選択される少なくとも一つを含み、
前記第2材料は、ベリリウム(Be)、炭素(C)およびシリコン(Si)を備える群から選択される少なくとも一つを含む、請求項7に記載の形状可変ミラー。 - 前記複数の第1層のそれぞれは、1nm以上10nm以下の厚さを有し、
前記複数の第2層のそれぞれは、1nm以上10nm以下の厚さを有する、請求項7または8に記載の形状可変ミラー。 - 前記複数の第1層のそれぞれの厚さおよび前記複数の第2層のそれぞれの厚さの少なくとも一方は、厚さ方向の位置に応じて異なる、請求項7から9のいずれか一項に記載の形状可変ミラー。
- 前記反射層は、前記第1面と接触する、請求項4から10のいずれか一項に記載の形状可変ミラー。
- 前記反射電極は、前記第1面と前記反射層の間に設けられる接着層をさらに備える、請求項4から10のいずれか一項に記載の形状可変ミラー。
- 前記接着層の導電性は、前記反射層の導電性よりも高い、請求項12に記載の形状可変ミラー。
- 前記反射層の導電性は、前記接着層の導電性よりも高い、請求項12に記載の形状可変ミラー。
- 前記複数の制御電極と接合する第3面を有する第2基板をさらに備える、請求項1から14のいずれか一項に記載の形状可変ミラー。
- 前記第2基板は、前記第1基板と同じ圧電材料からなる、請求項15に記載の形状可変ミラー。
- 前記第2基板は、前記第3面とは反対側の第4面を有し、
前記第4面に設けられる裏面電極をさらに備え、
前記電源は、前記裏面電極と前記複数の制御電極の間に電圧を印加する、請求項16に記載の形状可変ミラー。 - 前記反射面は、少なくとも前記所定方向に曲率を有する、請求項1から17のいずれか一項に記載の形状可変ミラー。
- 請求項1から18のいずれか一項に記載の形状可変ミラーを含むX線光学系と、
前記X線光学系から出射するX線を検出するX線検出部と、を備えるX線装置。 - 請求項1から18のいずれか一項に記載の形状可変ミラーを含むX線光学系と、
前記X線光学系から出射するX線が照射される試料を保持する試料保持部と、を備えるX線装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US18/693,026 US20250132065A1 (en) | 2021-10-01 | 2022-09-22 | Deformable mirror and x-ray device |
| EP22876024.5A EP4411754A1 (en) | 2021-10-01 | 2022-09-22 | Shape-variable mirror and x-ray device |
| CN202280062440.2A CN117941011A (zh) | 2021-10-01 | 2022-09-22 | 可变形镜以及x射线装置 |
| JP2023551410A JP7587318B2 (ja) | 2021-10-01 | 2022-09-22 | 形状可変ミラーおよびx線装置 |
| JP2024191535A JP2025020263A (ja) | 2021-10-01 | 2024-10-31 | 形状可変ミラー |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-163085 | 2021-10-01 | ||
| JP2021163085 | 2021-10-01 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023054157A1 true WO2023054157A1 (ja) | 2023-04-06 |
Family
ID=85782540
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/035337 WO2023054157A1 (ja) | 2021-10-01 | 2022-09-22 | 形状可変ミラーおよびx線装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20250132065A1 (ja) |
| EP (1) | EP4411754A1 (ja) |
| JP (2) | JP7587318B2 (ja) |
| CN (1) | CN117941011A (ja) |
| WO (1) | WO2023054157A1 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06163366A (ja) * | 1992-11-27 | 1994-06-10 | Hitachi Ltd | 露光方法及び露光装置 |
| JP2007527030A (ja) * | 2004-02-06 | 2007-09-20 | ソシエテ、ユーロペーヌ、ド、システム、オプティク | 半剛性材料からなる中央コアにより分離された2枚の圧電層を備えたバイモルフミラー |
| WO2008081873A1 (ja) * | 2006-12-28 | 2008-07-10 | Jtec Corporation | 位相回復法を用いたx線集光方法及びその装置 |
| JP2018522280A (ja) * | 2015-07-15 | 2018-08-09 | カール・ツァイス・エスエムティー・ゲーエムベーハー | リソグラフィ露光装置のミラー構成体及びミラー構成体を含む光学系 |
| JP6478433B2 (ja) | 2015-09-25 | 2019-03-06 | 国立大学法人大阪大学 | X線顕微鏡 |
| JP2021021897A (ja) | 2019-07-30 | 2021-02-18 | 株式会社ジェイテックコーポレーション | 形状可変ミラー |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06258498A (ja) * | 1993-03-08 | 1994-09-16 | Aloka Co Ltd | 結晶モノクロメータ |
| JP2002122719A (ja) * | 2000-08-08 | 2002-04-26 | Olympus Optical Co Ltd | 光学装置 |
-
2022
- 2022-09-22 CN CN202280062440.2A patent/CN117941011A/zh active Pending
- 2022-09-22 EP EP22876024.5A patent/EP4411754A1/en active Pending
- 2022-09-22 JP JP2023551410A patent/JP7587318B2/ja active Active
- 2022-09-22 WO PCT/JP2022/035337 patent/WO2023054157A1/ja active Application Filing
- 2022-09-22 US US18/693,026 patent/US20250132065A1/en active Pending
-
2024
- 2024-10-31 JP JP2024191535A patent/JP2025020263A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06163366A (ja) * | 1992-11-27 | 1994-06-10 | Hitachi Ltd | 露光方法及び露光装置 |
| JP2007527030A (ja) * | 2004-02-06 | 2007-09-20 | ソシエテ、ユーロペーヌ、ド、システム、オプティク | 半剛性材料からなる中央コアにより分離された2枚の圧電層を備えたバイモルフミラー |
| WO2008081873A1 (ja) * | 2006-12-28 | 2008-07-10 | Jtec Corporation | 位相回復法を用いたx線集光方法及びその装置 |
| JP2018522280A (ja) * | 2015-07-15 | 2018-08-09 | カール・ツァイス・エスエムティー・ゲーエムベーハー | リソグラフィ露光装置のミラー構成体及びミラー構成体を含む光学系 |
| JP6478433B2 (ja) | 2015-09-25 | 2019-03-06 | 国立大学法人大阪大学 | X線顕微鏡 |
| JP2021021897A (ja) | 2019-07-30 | 2021-02-18 | 株式会社ジェイテックコーポレーション | 形状可変ミラー |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023054157A1 (ja) | 2023-04-06 |
| JP7587318B2 (ja) | 2024-11-20 |
| JP2025020263A (ja) | 2025-02-12 |
| EP4411754A1 (en) | 2024-08-07 |
| CN117941011A (zh) | 2024-04-26 |
| US20250132065A1 (en) | 2025-04-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Matsuyama et al. | Nearly diffraction-limited X-ray focusing with variable-numerical-aperture focusing optical system based on four deformable mirrors | |
| JP5756982B2 (ja) | X線集光方法、反射面形状制御ミラー装置及び反射面形状制御ミラーの製造方法 | |
| JP4814782B2 (ja) | 位相回復法を用いたx線集光方法及びその装置 | |
| Barrett et al. | Dynamically-figured mirror system for high-energy nanofocusing at the ESRF | |
| JP2005534183A (ja) | 光学デバイス | |
| JP6048867B2 (ja) | X線光学システム | |
| WO2015155061A1 (en) | Mirror arrangement, projection lens and euv lithography apparatus | |
| Jiang et al. | A piezoelectric deformable X-ray mirror for phase compensation based on global optimization | |
| CN118103739A (zh) | Euv多反射镜布置 | |
| JP7587318B2 (ja) | 形状可変ミラーおよびx線装置 | |
| Lider | Kirkpatrick–Baez and Wolter X-ray focusing optics | |
| Sutter et al. | Automated in-situ optimization of bimorph mirrors at Diamond Light Source | |
| Signorato et al. | Performance of an adaptive u-focusing Kirkpatrick-Baez system for high-pressure studies at the Advanced Photon Source | |
| JP6051361B2 (ja) | 形状可変x線ミラーシステム | |
| CN113972023B (zh) | 一种复合面型的x射线压电变形镜 | |
| JP3010844B2 (ja) | X線反射鏡 | |
| Ice et al. | A simple cantilevered mirror for focusing synchrotron radiation | |
| JP7706207B2 (ja) | ミラー装置、光学装置およびレーザー核融合炉 | |
| Spiga et al. | Manufacturing an active X-ray mirror prototype in thin glass | |
| Padmore et al. | Sub-micron white-beam focusing using elliptically bent mirrors | |
| Signorato et al. | Performance of the SPring-8 modular piezoelectric bimorph mirror prototype | |
| WO2024185886A1 (ja) | ミラー装置、光学装置およびレーザー核融合炉 | |
| Peverini et al. | Reflective optics for EUV/x-ray sources at Thales SESO: possibilities and perspectives | |
| Hudec | Kirkpatrick-Baez x-ray optics: a review | |
| Tian et al. | An active piezoelectric plane X-ray focusing mirror with a linearly changing thickness |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22876024 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023551410 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202280062440.2 Country of ref document: CN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18693026 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2022876024 Country of ref document: EP Effective date: 20240502 |
|
| WWP | Wipo information: published in national office |
Ref document number: 18693026 Country of ref document: US |