WO2023053670A1 - 情報処理方法、プログラム、及び情報処理装置 - Google Patents
情報処理方法、プログラム、及び情報処理装置 Download PDFInfo
- Publication number
- WO2023053670A1 WO2023053670A1 PCT/JP2022/027600 JP2022027600W WO2023053670A1 WO 2023053670 A1 WO2023053670 A1 WO 2023053670A1 JP 2022027600 W JP2022027600 W JP 2022027600W WO 2023053670 A1 WO2023053670 A1 WO 2023053670A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- information
- map data
- dimensional space
- dimensional
- predetermined
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





Classifications
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/003—Maps
- G09B29/006—Representation of non-cartographic information on maps, e.g. population distribution, wind direction, radiation levels, air and sea routes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
- G06T17/05—Geographic models
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3863—Structures of map data
- G01C21/3867—Geometry of map features, e.g. shape points, polygons or for simplified maps
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3863—Structures of map data
- G01C21/387—Organisation of map data, e.g. version management or database structures
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/20—Information retrieval; Database structures therefor; File system structures therefor of structured data, e.g. relational data
- G06F16/29—Geographical information databases
Definitions
- the present invention relates to an information processing method, a program, and an information processing apparatus.
- 3D map data has been researched and developed, and the use of this 3D map data is being considered.
- 3D map data there are issues regarding how to use 3D map data, such as how to route drones that come and go to prevent them from colliding when flying objects such as drones navigate in the airspace beyond the pilot's line of sight.
- an object of the present invention is to provide user-friendly 3D map data by focusing on the height direction of 3D map data.
- An information processing method is an information processing method executed by an information processing apparatus including a processor, wherein the processor acquires three-dimensional map data, and converts the three-dimensional map data into predetermined three It divides into dimensional spaces and assigns identification information to each divided three-dimensional space.
- FIG. 4 is a diagram showing an example of a three-dimensional space division process and an ID assignment process according to an embodiment of the present invention; It is a figure which shows an example of wide-area identification information and narrow-area identification information which concern on one Embodiment of this invention.
- FIG. 4 is a diagram showing an example of a feature code according to one embodiment of the present invention; FIG. FIG.
- FIG. 4 is a diagram showing an example of common information of feature data according to one embodiment of the present invention.
- FIG. 4 is a diagram showing an example of associating identified lanes with buildings and facilities according to an embodiment of the present invention;
- 6 is a flow chart showing an example of processing related to ID assignment according to an embodiment of the present invention.
- map data used in this embodiment is, for example, highly accurate three-dimensional map data used for automatic driving or the like.
- this map data is map data called a dynamic map provided in real time to which more dynamic information such as information on surrounding vehicles and traffic information is added.
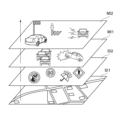
- the map data used in this embodiment are classified into, for example, four hierarchies.
- FIGS. 1 and 2 are diagrams showing an example of the hierarchical structure of map data according to one embodiment of the present invention.
- the map data are classified into static information SI1, semi-static information SI2, semi-dynamic information MI1 and dynamic information MI2.
- the static information SI1 is three-dimensional high-precision fundamental map data (high-precision three-dimensional map data), including road surface information, lane information, three-dimensional structures, etc., and three-dimensional position coordinates indicating features. and linear vector data.
- the semi-static information SI2, the semi-dynamic information MI1, and the dynamic information MI2 are dynamic data that change from moment to moment, and are data superimposed on the static information based on the position information.
- the semi-static information SI2 includes traffic regulation information, road construction information, wide-area weather information, and the like.
- the semi-dynamic information MI1 includes accident information, traffic congestion information, narrow area weather information, and the like.
- the dynamic information MI2 includes ITS (Intelligent Transport System) information, including surrounding vehicles, pedestrians, signal information, and the like.
- the 3D map data in this embodiment may include 3D map data generated from satellite images.
- satellite images are corrected to generate high-precision map data, and this embodiment can also be applied to this three-dimensional map data.
- the three-dimensional map data is divided into predetermined three-dimensional spaces, and identification information is assigned to each three-dimensional space. This makes it possible to select the ID of each 3D space as appropriate when setting the routing of the aircraft or using it with other applications, eliminating the need to set the coordinate values and area of the desired area each time. . Therefore, according to the present embodiment, it is possible to set the flight route of the drone by dividing the space into sizes that are easy to manage, and to associate peripheral information such as weather information for each space.
- User-friendly 3D map data can be provided to the user.
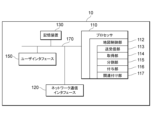
- FIG. 3 is a diagram showing an example of the configuration of the information processing device 10 according to one embodiment of the present invention.
- the information processing apparatus 10 includes one or more processors (CPUs: Central Processing Units) 110, one or more network communication interfaces 120, a storage device 130, a user interface 150, and 1 for interconnecting these components. It includes one or more communication buses 170 . Note that the user interface 150 may be connected via a network.
- the storage device 130 is, for example, high-speed random access memory such as DRAM, SRAM, or other random access solid-state memory devices.
- Storage 130 may also be non-volatile memory, such as one or more magnetic disk storage devices, optical disk storage devices, flash memory devices, or other non-volatile solid-state storage devices.
- the storage device 130 may be a non-temporary computer-readable recording medium.
- storage device 130 may be one or more storage devices installed remotely from the processor 110 .
- storage device 130 stores programs, modules, and data structures executed by processor 110, or a subset thereof.
- the storage device 130 stores data used by the information processing system 1 .
- the storage device 130 stores 3D map data and data relating to generation of this 3D map data.
- the storage device 130 stores 3D map data, feature data, and the like.
- an example of the three-dimensional map data includes static information SI1, semi-static information SI2, semi-dynamic information MI1, and dynamic information MI2, as described above with reference to FIG. information is associated with
- the static information SI1 includes high-precision 3D map data, and the high-precision 3D map data includes feature data.
- This feature data is basic information when an application uses this high-precision three-dimensional map data.
- the processor 110 that executes processing related to generation of 3D map data according to this embodiment will be described.
- the processor 110 configures the map control unit 212 , the transmission/reception unit 113 , the acquisition unit 114 , the division unit 115 , the addition unit 116 , and the association unit 117 by executing programs stored in the storage device 130 .
- the processor 110 controls the processing of each unit, which will be described later, and executes processing related to map data generation.
- the map control unit 112 uses various data to control the generation of 3D map data. For example, the map control unit 112 controls the generation of high-precision three-dimensional map data, divides the high-precision three-dimensional map data into predetermined three-dimensional spaces, and also controls the process of assigning identification information to each three-dimensional space. do.
- the transmission/reception unit 113 transmits/receives data to/from an external device via the network communication interface 120 .
- the transmitting/receiving unit 113 receives three-dimensional map data from an external device, or receives a satellite image including a predetermined position from an observation satellite.
- the transmission/reception unit 113 transmits the processed three-dimensional map data to an external device via the network communication interface 120 .
- the acquisition unit 114 acquires 3D map data.
- the acquisition unit 114 may acquire 3D map data stored in the storage device 130, or may acquire 3D map data received via the network communication interface 120 via the transmission/reception unit 113.
- the 3D map data may be 3D map data measured and generated by MMS (Mobile Mapping System), or may be 3D map data generated from satellite images. do not have.
- MMS Mobile Mapping System
- the division unit 115 divides the three-dimensional map data acquired by the acquisition unit 114 into predetermined three-dimensional spaces. For example, the dividing unit 115 divides the 3D map data into predetermined 3D spaces according to a predetermined standard to generate a plurality of 3D spaces.
- the shape of the three-dimensional space is not particularly limited, but the shape of the three-dimensional space may be specified according to the model of the three-dimensional map data. A rectangular parallelepiped shape is also included), and a cubic shape (including a substantially cubic shape) is more preferable.
- the three-dimensional space to be divided may be divided not only on the surface of the earth or on the sea, but also on the ground or in the sea.
- the assigning unit 116 assigns identification information to each divided three-dimensional space.
- the identification information may be information that can identify each three-dimensional space, and may be given according to a predetermined rule. From the viewpoint of data management, the assigning unit 116 preferably assigns identification information according to a rule that allows easy derivation of the surrounding three-dimensional space or the three-dimensional space within the same area.
- the identification information assigned to each three-dimensional space of the three-dimensional map data can be appropriately selected and extracted according to a predetermined purpose, thereby expanding the range of use. For example, in vehicle routing, this identification information can be selected and combined to allow the vehicle corridors to be set accordingly. In addition, it becomes possible to easily form a geofence or the like up to a predetermined height simply by selecting the identification information of the three-dimensional space.
- the dividing unit 115 divides the horizontal two-dimensional map data included in the three-dimensional map data into predetermined two-dimensional regions by dividing the two-dimensional region into predetermined heights. and generating a predetermined three-dimensional space.
- the dividing unit 115 uses UTM (Universal Transverse Mercator) grid-divided map data, divides each divided area into predetermined heights in the height direction, and generates each three-dimensional space. good. If the predetermined height is the same as the grid-divided longitude-latitude distance, a cubic three-dimensional space is generated, and if it is different from the grid-divided latitude-longitude distance, a rectangular parallelepiped three-dimensional space is generated. . This makes it possible to easily divide a three-dimensional space using existing map data.
- the dividing unit 115 divides the two-dimensional map data included in the three-dimensional map data into predetermined two-dimensional areas according to predetermined criteria, divides each two-dimensional area into predetermined heights, and divides each two-dimensional area into predetermined three-dimensional areas.
- a dimensional space may be generated. This allows the cartographer to freely determine the size of the three-dimensional space according to the purpose.
- the division unit 115 may also change the unit of the predetermined three-dimensional space according to the position within the three-dimensional map data. For example, the dividing unit 115 may appropriately change the size of the three-dimensional space based on the altitude or the position on the map in the horizontal direction. good too. This makes it possible to generate a flexible three-dimensional space according to the position of the three-dimensional map data.
- the dividing unit 115 may include changing at least the units in the height direction of the predetermined three-dimensional space based on the altitude. For example, the dividing unit 115 may increase the unit of division height as it goes higher in the sky. This is because it is considered that the higher the sky, the less the need for segmentation. Moreover, the dividing unit 115 may change not only the unit in the height direction of the three-dimensional space but also the size in the horizontal direction according to the altitude. For example, the dividing unit 115 may increase the horizontal size of the division as it goes higher in the sky.
- the dividing unit 115 may also include changing at least the horizontal unit of the predetermined three-dimensional space based on the feature data or area information included in the three-dimensional map data. For example, the division unit 115 may change at least the units in the horizontal direction of the three-dimensional space depending on whether the region to be divided is a mountainous area or an urban area. More specifically, if the region to be divided is a mountainous area, the division unit 115 may make the unit of the horizontal direction of the three-dimensional space larger than the unit of the urban area. Further, if the region to be divided is a mountainous area, the dividing unit 115 may make the unit in the height direction of the three-dimensional space larger than the unit of the urban area.
- the division unit 115 changes at least the horizontal unit of the predetermined three-dimensional space based on the type of feature data included in the three-dimensional map data (for example, highways, general roads, traffic lights, number of lanes). may include For example, the division unit 115 may increase the unit of the horizontal direction of the three-dimensional space for regions other than highways, highways with many lanes, and areas around traffic lights. In addition, the dividing unit 115 may increase the unit in the height direction of the three-dimensional space for regions other than expressways, arterial roads with many lanes, and areas around traffic lights.
- the horizontal size of the three-dimensional space it is possible to determine the horizontal size of the three-dimensional space according to the characteristics of the area based on the feature data or area information included in the three-dimensional map data. For example, by enlarging the unit in the horizontal direction of the three-dimensional space in the mountainous area, it is possible to reduce the load of the division processing and the processing of adding the identification information, and it is possible to perform the processing efficiently.
- the adding unit 116 may also add identification information based on coordinate values at predetermined positions in each three-dimensional space. For example, based on the coordinate values (longitude, latitude, altitude) of the central position in the three-dimensional space, the assigning unit 116 may combine the respective coordinate values to generate the identification information. Further, the granting unit 116 may grant identification information using a UTM zone number. For example, the identification number is a number of several digits indicating UTM zone number + latitude/longitude/altitude.
- the association unit 117 associates identification information corresponding to a predetermined position in the three-dimensional space with feature data in the three-dimensional space. For example, the associating unit 117 associates the center position in the three-dimensional space with feature data existing in the three-dimensional space.
- the feature data may already be included in the three-dimensional map data, or may be generated by extracting the data by image recognition or the like using an image in the three-dimensional space.
- the predetermined position in the three-dimensional space is not limited to the central position, and may be one of the vertices or a characteristic position in the three-dimensional space.
- FIG. 4 is a diagram showing an example of a three-dimensional space division process and an ID assignment process according to an embodiment of the present invention.
- the example shown in FIG. 4 shows an example in which a three-dimensional space area of Japan is divided into predetermined three-dimensional spaces.
- the dividing unit 115 divides the three-dimensional map data into the area of Japan (approximately 380,000 km 2 ) up to an altitude of 3000 m.
- Altitude 3000 is the maximum flight altitude of the helicopter without oxygen supply, although other altitude values may be used.
- the granting unit 116 grants identification information to each three-dimensional space.
- the granting unit 116 may grant two types of IDs, wide-range identification information ID1 and narrow-range identification information ID2.
- the wide-area identification information ID1 is, for example, an ID that identifies each three-dimensional space, and is also a management ID for managing each three-dimensional space.
- the narrow-area information ID2 included in each three-dimensional space the number of digits of the narrow-area information ID2 can be reduced, and the communication capacity when distributing the narrow-area information ID2 can be reduced. becomes possible.
- the narrow-area identification information ID2 is, for example, an ID that targets a predetermined area and is associated with the wide-area identification information ID1 and managed for each predetermined application. Also, narrow-range information ID2 is information for identifying an object, and its persistence may be guaranteed. Basically, one ID is assigned to one object, but if the same object has different acquisition criteria, it may be managed as a different ID.
- the predetermined district may be, for example, a densely inhabited district.
- the narrow-range identification information ID2 may be used for the purpose of managing necessary information, for example, in automated mobility operations.
- the predetermined application is AD (Autonomous Driving) / ADAS (advanced driver assistance system), PMV (Personal Mobility Vehicle), as an object of narrow-range identification information, roads, lanes, sidewalks, signs, road markings, Buildings and the like are used, and IDs (identification information) are assigned to them.
- the predetermined application is a flying object such as a drone, air routes, emergency evacuation areas, restricted flight areas, etc. are used as objects of narrow-area identification information, and IDs are assigned to these.
- the predetermined application is snow removal, lanes, sidewalks, manholes, bridge joints, etc. are used as narrow-area identification information objects, and identification information is assigned to these.
- the narrow-area identification information ID2 is an ID given to a predetermined position of a corridor used for routing of an aircraft, an ID of feature data used for automatic operation, and the like.
- the feature data shown in FIG. 4 are lanes.
- the association unit 117 associates the ID given to the lane and the ID of the corridor with the wide area ID.
- FIG. 5 is a diagram showing an example of wide-area identification information and narrow-area identification information according to one embodiment of the present invention.
- the wide-area identification information for the three-dimensional space is "54N35123456". This is an example of information combining UTM zone "54”, north latitude "N35", and a 6-digit number (a number indicating longitude and altitude).
- the number of lanes in the roadway is 3, and the number of links connecting each lane is 7.
- the narrow-area identification information of the lane is first represented by the wide-area identification information "54N35123456", and is generated by linking the ID of the feature data to it. Note that the ID portion of the feature data linked to the wide-area identification information may be called narrow-area identification information.
- the 9-digit information of "ABCDEFGHI” includes common feature data information (described later with reference to FIGS. 6 and 7) and lane In the information "10001", the tenth digit "1" indicates lane 1, and the eleventh to fourteenth digits "0001" indicate the link number. This makes it possible to reduce the number of digits of the ID (narrow area identification information) of the feature data rather than assigning the ID to the feature data without distinguishing the three-dimensional space.
- the information given to the connection No in FIG. 5 indicates the lane link ID (narrow-range identification information of this lane link).
- FIG. 6 is a diagram showing an example of a feature code according to one embodiment of the present invention.
- a feature code is data relating to identification of a feature, and is, for example, data included in common information of feature data.
- Feature codes are associated with feature names.
- the feature code "01” indicates the feature name “lane link (lane link outside the intersection)"
- the feature code "02” indicates the feature name “lane link (lane link inside the intersection)”. )”.
- a lane link may also be written as a "lane centerline” and includes a plurality of constituent points.
- the type of feature can be identified by the first single digit of the feature code. For example, if the first digit of the feature code is "0", the feature is related to the lane link. If the first digit is "2", it is a feature painted on the road (division line, multi-division line, shoulder edge, tunnel boundary edge, etc.). If the first digit is "3", the features are intersections and road markings (regulatory markings, direction markings, other markings, etc.). If the first digit is "4", the feature is a road sign (guidance sign, warning sign, regulatory sign, instruction sign, other sign, unidentifiable sign, etc.). If the first digit is "5", the feature is a traffic signal (main body, auxiliary signal, arrow, etc.).
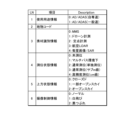
- FIG. 7 is a diagram showing an example of common information of feature data according to one embodiment of the present invention.
- the common information of feature data includes usage purpose information, feature code, material identification information, positioning state information, upward state information, imaging control information, and the like.
- Purpose of use information includes information specifying whether the AD/ADAS is to be used on private roads or on general roads.
- a private road refers to a road on which a vehicle moves in the lateral direction as it runs side by side at a branch, a merging section, or the like.
- the feature code includes any of the codes shown in FIG.
- the material identification information, positioning state information, and upward state information are information specified by the specifying unit 216 as described above. At least one piece of information specified by the specifying unit 216 is included in a predetermined field (LN (Line Number) field shown in FIG. 7) of the feature data shown in FIG. 7 by the generating unit 217 .
- FIG. 7 shows an example in which all of the material identification information, the positioning state information, and the upward state information are included in the feature data.
- the material identification information shown in FIG. 7 includes information for specifying any of measurement by MMS, drone measurement, fixed point measurement, measurement by air LiDAR, and measurement by satellite image/SAR image.
- the positioning state identification information includes information for specifying any of non-positioning, multipath environment, normal positioning (single positioning), normal positioning (sub-m class), and high-precision positioning (cm class).
- the upper state information includes information for specifying closed, partially open skies, or open skies.
- the imaging control information is information specified by the specifying unit 216 .
- the imaging control information may include an aperture value, an ISO value, a shutter speed, and the like.
- the identification information of the feature data should be linked to the common information shown in FIG. 7 and the information specific to the feature data should be added after the seventh digit.
- FIG. 8 is a diagram showing an example of associating identified lanes with buildings and facilities according to an embodiment of the present invention.
- the location information of Building 1 which is a predetermined building and facility, is the difference (X1, Y1, Z1).
- the building facility data of the first building as the feature data is generated by adding the difference (X1, Y1, Z1) to the lane link ID "XXXXX123456ABCDEFGHI1002" as relative position information to generate the ID "XXXXX123456ABCDEFGHI1002X1Y1Z1".
- the building facility data of the first building may include all kinds of information related to the first building, such as the type, shape and size of the building of the first building, as data associated with the ID.
- the building facility data is generated by newly generating the ID "XXXXX123456ABCDEFGHI1002X1Y1Z1" of the building facility data of the first building and linking the building facility information of the first building to the ID. It may be handled as extended data of the lane link ID "XXXXX123456ABCDEFGHI1002".
- the building facility data may be included in the feature data of the lane link ID by associating with the lane link ID "XXXX123456ABCDEFGHI1002" of the configuration point of the lane link.
- the relative position information is converted to (x1, y1, z1) by reducing the amount of information (number of digits) in consideration of a predetermined resolution, etc., within a range where the effect is small as data that is
- the data may be "XXXXXX123456ABCDEFGHI1002x1y1z1".
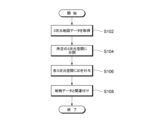
- FIG. 9 is a flow chart showing an example of processing related to ID assignment according to one embodiment of the present invention.
- step S102 the acquisition unit 114 of the information processing device 10 acquires 3D map data.
- the acquisition source of the 3D map data may be the storage device 130 or an external device on the network.
- step S104 the dividing unit 115 of the information processing device 10 divides the acquired three-dimensional map data into predetermined three-dimensional spaces according to predetermined criteria.
- Divider 115 preferably divides into cubes of a predetermined size.
- step S106 the assigning unit 116 of the information processing apparatus 10 assigns identification information to each divided three-dimensional space according to a predetermined rule.
- the predetermined rule is preferably a rule commonly used in the world, for example, a rule using position information.
- step S108 the association unit 117 of the information processing device 10 associates the identification information of the three-dimensional space with the feature data in this three-dimensional space. Note that the process of step S108 is not necessarily required.
- the identification information assigned to each three-dimensional space of the three-dimensional map data can be appropriately selected and extracted according to a predetermined purpose, thereby expanding the range of use. For example, in vehicle routing, this identification information can be selected and combined to allow the vehicle corridors to be set accordingly. In addition, it becomes possible to easily form a geofence or the like up to a predetermined height simply by selecting the identification information of the three-dimensional space.
- part of the processing executed by the information processing device 20 may be transferred to another information processing device, or a plurality of information processing devices may be appropriately integrated.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Geometry (AREA)
- Software Systems (AREA)
- Databases & Information Systems (AREA)
- Computer Graphics (AREA)
- Automation & Control Theory (AREA)
- Data Mining & Analysis (AREA)
- General Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Ecology (AREA)
- Mathematical Physics (AREA)
- Business, Economics & Management (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- Instructional Devices (AREA)
- Processing Or Creating Images (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP22875548.4A EP4411697A4 (en) | 2021-09-28 | 2022-07-13 | INFORMATION PROCESSING METHOD, PROGRAM AND INFORMATION PROCESSING DEVICE |
| US18/689,663 US20250278893A1 (en) | 2021-09-28 | 2022-07-13 | Information processing method, program, and information processing apparatus |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-158001 | 2021-09-28 | ||
| JP2021158001A JP7329208B2 (ja) | 2021-09-28 | 2021-09-28 | 情報処理方法、プログラム、及び情報処理装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023053670A1 true WO2023053670A1 (ja) | 2023-04-06 |
Family
ID=85779756
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/027600 Ceased WO2023053670A1 (ja) | 2021-09-28 | 2022-07-13 | 情報処理方法、プログラム、及び情報処理装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20250278893A1 (enExample) |
| EP (1) | EP4411697A4 (enExample) |
| JP (2) | JP7329208B2 (enExample) |
| WO (1) | WO2023053670A1 (enExample) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025028361A1 (ja) * | 2023-08-01 | 2025-02-06 | ダイナミックマッププラットフォーム株式会社 | 情報処理方法、プログラム、及び情報処理装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006253888A (ja) * | 2005-03-09 | 2006-09-21 | Mitsubishi Electric Corp | 位置情報管理装置及び位置情報管理方法 |
| JP2011197064A (ja) | 2010-03-17 | 2011-10-06 | Mitsubishi Electric Corp | 3次元地図表示装置 |
| JP2012243226A (ja) * | 2011-05-23 | 2012-12-10 | Nec System Technologies Ltd | 地盤高データ生成装置、地盤高データ生成方法、及びプログラム |
| JP2016051050A (ja) * | 2014-08-29 | 2016-04-11 | アイシン・エィ・ダブリュ株式会社 | 地図表示システム、地図表示方法、及び地図表示プログラム |
| JP2020038362A (ja) * | 2018-08-31 | 2020-03-12 | 株式会社デンソー | 車両側装置、サーバ、方法および記憶媒体 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6790381B2 (ja) * | 2016-03-03 | 2020-11-25 | 株式会社リコー | 情報処理装置、端末装置、情報処理システム、情報処理方法、及びプログラム |
| JP6846253B2 (ja) * | 2017-03-28 | 2021-03-24 | 株式会社ゼンリンデータコム | ドローン用緊急事態対応指示装置、ドローン用緊急事態対応指示方法及びドローン用緊急事態対応指示プログラム |
| JP2021018085A (ja) * | 2019-07-18 | 2021-02-15 | 株式会社ゼンリンデータコム | 経路作成装置、方法およびプログラム |
| JP2021100234A (ja) * | 2019-12-20 | 2021-07-01 | 株式会社センシンロボティクス | 飛行体の撮像方法及び情報処理装置 |
-
2021
- 2021-09-28 JP JP2021158001A patent/JP7329208B2/ja active Active
-
2022
- 2022-07-13 WO PCT/JP2022/027600 patent/WO2023053670A1/ja not_active Ceased
- 2022-07-13 EP EP22875548.4A patent/EP4411697A4/en active Pending
- 2022-07-13 US US18/689,663 patent/US20250278893A1/en active Pending
-
2023
- 2023-07-27 JP JP2023122348A patent/JP2023129658A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006253888A (ja) * | 2005-03-09 | 2006-09-21 | Mitsubishi Electric Corp | 位置情報管理装置及び位置情報管理方法 |
| JP2011197064A (ja) | 2010-03-17 | 2011-10-06 | Mitsubishi Electric Corp | 3次元地図表示装置 |
| JP2012243226A (ja) * | 2011-05-23 | 2012-12-10 | Nec System Technologies Ltd | 地盤高データ生成装置、地盤高データ生成方法、及びプログラム |
| JP2016051050A (ja) * | 2014-08-29 | 2016-04-11 | アイシン・エィ・ダブリュ株式会社 | 地図表示システム、地図表示方法、及び地図表示プログラム |
| JP2020038362A (ja) * | 2018-08-31 | 2020-03-12 | 株式会社デンソー | 車両側装置、サーバ、方法および記憶媒体 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4411697A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20250278893A1 (en) | 2025-09-04 |
| JP2023048587A (ja) | 2023-04-07 |
| JP7329208B2 (ja) | 2023-08-18 |
| JP2023129658A (ja) | 2023-09-14 |
| EP4411697A1 (en) | 2024-08-07 |
| EP4411697A4 (en) | 2025-10-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3290952B1 (en) | Automatic localization geometry detection | |
| US10885795B2 (en) | Air space maps | |
| CN108763287B (zh) | 大规模可通行区域驾驶地图的构建方法及其无人驾驶应用方法 | |
| EP3660737B1 (en) | Method, apparatus, and system for providing image labeling for cross view alignment | |
| CN111542860B (zh) | 用于自主车辆的高清地图的标志和车道创建 | |
| CN109643367B (zh) | 用于自主车辆导航的众包和分发稀疏地图以及车道测量的方法、系统和可读介质 | |
| Brenner | Extraction of features from mobile laser scanning data for future driver assistance systems | |
| CN115516277A (zh) | 使用电子地平线导航交通工具 | |
| EP3644013B1 (en) | Method, apparatus, and system for location correction based on feature point correspondence | |
| CN110118564B (zh) | 一种高精度地图的数据管理系统、管理方法、终端和存储介质 | |
| WO2018113451A1 (zh) | 一种地图数据系统、其生成和使用方法及应用 | |
| JP2018165930A (ja) | ドローンナビゲーション装置、ドローンナビゲーション方法及びドローンナビゲーションプログラム | |
| KR101756946B1 (ko) | 경도선/위도선을 기반으로 교통로를 구성하고, 지도 검색을 수행하는 방법 및 장치 | |
| US10699571B2 (en) | High definition 3D mapping | |
| US11055862B2 (en) | Method, apparatus, and system for generating feature correspondence between image views | |
| JP7068756B2 (ja) | 地図データ生成プログラム、コンピュータ読取可能な記録媒体および地図データ生成装置 | |
| JP7329208B2 (ja) | 情報処理方法、プログラム、及び情報処理装置 | |
| CN112945248A (zh) | 用于创建数字地图的方法、控制设备、计算机程序和机器可读的存储介质 | |
| KR20190004983A (ko) | 무인비행체의 안전 운항을 위한 디지털 무빙 맵 서비스 제공 방법 및 장치 | |
| JP7138290B1 (ja) | 情報処理方法、プログラム及び情報処理装置 | |
| JP2022059827A (ja) | 情報処理方法、プログラム及び情報処理装置 | |
| JP7353951B2 (ja) | コンピュータシステムおよびプログラム | |
| KR20190004976A (ko) | 무인비행체의 안전 운항을 위한 디지털 무빙 맵 생성 방법 및 장치 | |
| WO2025028361A1 (ja) | 情報処理方法、プログラム、及び情報処理装置 | |
| JP7323146B2 (ja) | 情報処理方法、プログラム、及び情報処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22875548 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2022875548 Country of ref document: EP Effective date: 20240429 |
|
| WWP | Wipo information: published in national office |
Ref document number: 18689663 Country of ref document: US |