WO2022254996A1 - 処理装置 - Google Patents
処理装置 Download PDFInfo
- Publication number
- WO2022254996A1 WO2022254996A1 PCT/JP2022/018560 JP2022018560W WO2022254996A1 WO 2022254996 A1 WO2022254996 A1 WO 2022254996A1 JP 2022018560 W JP2022018560 W JP 2022018560W WO 2022254996 A1 WO2022254996 A1 WO 2022254996A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- time
- value
- processing device
- signal
- arithmetic circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images










Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B69/00—Training appliances or apparatus for special sports
- A63B69/36—Training appliances or apparatus for special sports for golf
- A63B69/3617—Striking surfaces with impact indicating means, e.g. markers
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B19/00—Teaching not covered by other main groups of this subclass
- G09B19/003—Repetitive work cycles; Sequence of movements
- G09B19/0038—Sports
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B69/00—Training appliances or apparatus for special sports
- A63B69/36—Training appliances or apparatus for special sports for golf
- A63B69/3614—Training appliances or apparatus for special sports for golf using electro-magnetic, magnetic or ultrasonic radiation emitted, reflected or interrupted by the golf club
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/80—Special sensors, transducers or devices therefor
- A63B2220/83—Special sensors, transducers or devices therefor characterised by the position of the sensor
- A63B2220/833—Sensors arranged on the exercise apparatus or sports implement
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B69/00—Training appliances or apparatus for special sports
- A63B69/36—Training appliances or apparatus for special sports for golf
Definitions
- the present invention relates to a processing device that detects the moment when a user starts swinging a hitting member such as a golf club.
- a swing analysis device described in Patent Document 1 is known as an invention for analyzing a swing of a golf club by a user.
- a sensor is attached to the shaft of the golf club.
- the swing analysis device analyzes the user's swing based on the signal acquired from the sensor.
- An object of the present invention is to provide a processing device that accurately identifies the moment when the user starts swinging the striking member.
- the inventor of the present application has studied a method of identifying the time when the acquired signal exceeds the judgment value as the swing start time as a method of accurately identifying the moment when the user starts swinging the striking member.
- the determination value is set based on the value of the signal generated by the swing.
- the processing device detects the time when the value of the signal obtained from the sensor exceeds the judgment value as the swing start time.
- the inventor of the present application has noticed that the impact may be applied to the striking member by actions other than swinging by the user. Actions other than swinging are, for example, actions in which the user erroneously knocks down the striking member. In this case, the inventor of the present application has noticed that there is a possibility that a force of the same degree as the force generated by the swing may be applied to the striking member. As a result, the inventor of the present application has noticed that the processing device may erroneously detect a motion other than the swing as the start of the swing.
- the inventor of the present application considered the usage of the striking member.
- the inventors of the present application have found that the moment when the striking member receives the strongest impact is the moment of impact when the striking member collides with the object to be struck. That is, the inventors of the present application have noticed that an impact greater than the impact at the moment of impact is not applied to the striking member.
- the inventors of the present application have found that when the first determination value is set based on the signal value at the moment of impact, the possibility of the processing device erroneously detecting the moment of impact is low.
- the inventor of the present application thought that a processing device with a low possibility of false detection could be provided by the following method.
- the processing device determines that the user has performed a swing motion. Then, the swing start time is specified from the times at which the signal was acquired before the impact time.
- the inventor of the present application re-examined a technique for accurately detecting the moment when a user starts swinging a hitting member such as a golf club.
- a hitting member such as a golf club.
- a processing apparatus includes: A calculation for determining a swing start time based on a first signal obtained from a sensor attached to a striking member for striking an object to be struck by swinging, the sensor detecting deformation of the striking member during swing. circuit, with defining the absolute value of the difference between the reference value and the value of the first signal as a first difference value;
- the arithmetic circuit is a first determination step of determining an impact time based on one or more times at which the first difference value becomes equal to or greater than a first determination value; The most recent period closest to the impact time from among one or more periods in which the first difference value is below the second judgment value over a reference time in the first signal acquired at a time before the impact time. a first identifying step of identifying a second identifying step of identifying a swing start time based on the latest period; to run.
- a processing apparatus includes: A calculation for determining a swing start time based on a first signal obtained from a sensor attached to a striking member for striking an object to be struck by swinging, the sensor detecting deformation of the striking member during swing. circuit, with The time at which the value of the first signal changes from being above the reference value to the state below it, or the time at which the value of the first signal changes from being below the reference value to being above the reference value.
- the arithmetic circuit is a first determination step of determining an impact time based on one or more times at which the first difference value becomes equal to or greater than a first determination value; a first identifying step of identifying one or more cross times in a first signal acquired at a time before the impact time; a second specifying step of specifying a swing start time based on the cross time closest to the impact time by a reference number among the one or more cross times; to run.
- shafts and members extending in the front-rear direction do not necessarily indicate only shafts and members parallel to the front-rear direction.
- a shaft or member extending in the front-rear direction is a shaft or member that is inclined within a range of ⁇ 45° with respect to the front-rear direction.
- the shafts and members that extend in the vertical direction are shafts and members that are inclined within a range of ⁇ 45° with respect to the vertical direction.
- An axis or member extending in the left-right direction is an axis or member that is inclined within a range of ⁇ 45° with respect to the left-right direction.
- the first member and the second member are structures provided in the sensor device.
- the first member being arranged on the second member refers to the following state. At least a portion of the first member is located directly above the second member. Therefore, when viewed in the vertical direction, the first member overlaps the second member. This definition also applies to directions other than the vertical direction.
- the first member is arranged above the second member means that at least part of the first member is positioned directly above the second member, and that the first member is positioned above the second member. This includes the case where the first member is positioned obliquely above the second member without being positioned directly above the member. In this case, the first member does not have to overlap the second member when viewed in the vertical direction. For example, diagonally upward means upper left and upper right. This definition also applies to directions other than the vertical direction.
- each part of the first member is defined as follows.
- front of the first member is meant the front half of the first member.
- a rear portion of the first member means the rear half of the first member.
- the left portion of the first member means the left half of the first member.
- the right portion of the first member means the right half of the first member.
- top of the first member is meant the top half of the first member.
- a lower portion of the first member means a lower half of the first member.
- the front end of the first member means the front end of the first member.
- the rear end of the first member means the rearward end of the first member.
- the left end of the first member means the left end of the first member.
- the right end of the first member means the right end of the first member.
- the upper end of the first member means the upper end of the first member.
- the lower end of the first member means the downward end of the first member.
- the front end of the first member means the front end of the first member and its vicinity.
- the rear end of the first member means the rear end of the first member and its vicinity.
- the left end of the first member means the left end of the first member and its vicinity.
- the right end of the first member means the right end of the first member and its vicinity.
- the upper end of the first member means the upper end of the first member and its vicinity.
- the lower end of the first member means the lower end of the first member and its vicinity.
- the processing device can accurately identify the moment when the user starts swinging the striking member.
- FIG. 1 is a diagram showing an example of a striking member 1 to which a sensor 10, an AD converter 20 and a processing device 30 are attached.
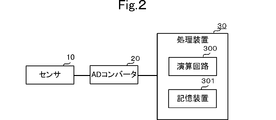
- FIG. 2 is a block diagram of the sensor 10, AD converter 20 and processor 30.
- FIG. 3A and 3B are rear and left side views of the sensor 10.
- FIG. 4 is a diagram showing an example of the first signal DSig1 output from the sensor 10 to the processing device 30.
- FIG. 5 is a flow chart showing the processing executed by the processing device 30.
- FIG. 6 is a flow chart showing the processing executed by the processing device 30a.
- FIG. 7 is a diagram showing an example of the third specifying step executed by the arithmetic circuit 300a.
- FIG. 8 is a flow chart showing the processing executed by the processing device 30b.
- FIG. 9 is a graph showing an example of the swing start time specified by the processing of the arithmetic circuit 300c.
- FIG. 10 is a flow chart showing the processing executed by the processing device 30c.
- FIG. 11 is a diagram showing an example of communication between the processing device 30d and the second processing device 40.
- FIG. 12 is a diagram showing an example of a deletion step executed by the processing device 30e.
- FIG. 1 is a diagram showing an example of a striking member 1 to which a sensor 10, an AD converter 20 and a processing device 30 are attached.
- FIG. 2 is a block diagram of the sensor 10, AD converter 20 and processor 30.
- FIG. 3A and 3B are rear and left side views of the sensor 10.
- FIG. 4 is a diagram showing an example of the first signal DSig1 output from the sensor 10 to the processing device 30.
- the vertical axis indicates signal output.
- the horizontal axis indicates time.
- FIG. 5 is a flow chart showing the processing executed by the processing device 30. As shown in FIG.
- the up-down direction, the left-right direction, and the front-rear direction are defined.
- the direction in which the shaft of the striking member 1 extends is defined as the vertical direction.
- the direction in which the face of the head of the striking member 1 faces is defined as the left direction.
- a direction orthogonal to the up-down direction and the left-right direction is defined as the front-rear direction.
- the up-down direction, the left-right direction, and the front-rear direction are directions defined for explanation. Therefore, the up-down direction, left-right direction and front-back direction of the striking member 1 during actual use need not coincide with the up-down direction, left-right direction and front-back direction shown in FIG.
- the hitting member 1 is a member for hitting an object to be hit.
- the striking member 1 is a golf club. Therefore, in this embodiment, the striking member 1 has a bar shape extending in the vertical direction.
- a user hits an object to be hit by swinging the hitting member 1 .
- the striking member 1 deforms. Specifically, when the user swings the hitting member 1, the hitting member 1 is deformed by inertial force and external force. The striking member 1 deforms in the left-right direction during a swing, for example.
- the sensor 10, the AD converter 20 and the processing device 30 are attached to the striking member 1 for striking the object by swinging. As shown in FIG. 1, in this embodiment, a sensor 10, an AD converter 20 and a processor 30 are fixed to the striking member 1. As shown in FIG. 1, in this embodiment, a sensor 10, an AD converter 20 and a processor 30 are fixed to the striking member 1. As shown in FIG.
- the sensor 10 detects deformation of the striking member 1 during swing. Specifically, the sensor 10 generates an electric charge according to the deformation of the striking member 1 .
- the sensor 10 converts the charge into a first signal Sig1, which is a voltage signal. Therefore, in this embodiment, the value of the first signal Sig1 is a value corresponding to the deformation amount of the striking member 1 in the left-right direction.
- the striking member 1 is elastically deformed. Therefore, the deformation amount of the hitting member 1 in the left-right direction is proportional to the force applied to the hitting member 1 when the user swings. In other words, the value of the first signal Sig1 indirectly indicates the force applied when the user swings the striking member 1 .
- the time at which the user started swinging the striking member 1 can be estimated from the value of the first signal Sig1.
- the value of the first signal Sig1 detected by the sensor 10 is small before and after the start of the swing.
- the period when the value of the first signal Sig1 is small includes the time when the user starts swinging.
- swing start time SwT the time when the user starts swinging the striking member 1 is referred to as swing start time SwT.
- the time at which the striking member 1 impacts the object to be struck is estimated from the value of the first signal Sig1. For example, at the moment when the user hits an object to be hit with the hitting member 1, the amount of deformation of the hitting member 1 is large. Therefore, the value of the first signal Sig1 detected by the sensor 10 is large. In other words, it can be inferred that the period when the value of the first signal Sig1 detected by the sensor 10 is large includes the time when the striking member 1 impacts the object to be struck.
- the time at which the hitting member 1 hits the object to be hit will be referred to as impact time InT.
- the sensor 10 is a piezoelectric sensor that detects pressure.
- the sensor 10 includes a piezoelectric film 100, a first electrode 101F, a second electrode 101B, a charge amplifier 102 and a voltage amplifier circuit 103, as shown in FIG.
- the piezoelectric film 100 has a sheet shape. Therefore, the piezoelectric film 100 has a first main surface F1 and a second main surface F2, as shown in FIG.
- the vertical length of the piezoelectric film 100 is longer than the horizontal length of the piezoelectric film 100 .
- the piezoelectric film 100 has a rectangular shape with long sides extending in the vertical direction when viewed in the front-rear direction.
- the piezoelectric film 100 generates electric charges according to the amount of deformation of the piezoelectric film 100 .
- the piezoelectric film 100 is a PLA film. The piezoelectric film 100 will be described in more detail below.
- piezoelectric film 100 is a film formed from a chiral polymer.
- a chiral polymer is, for example, polylactic acid (PLA), particularly L-type polylactic acid (PLLA).
- PLA polylactic acid
- PLLA L-type polylactic acid
- a PLLA composed of a chiral polymer has a helical structure in its main chain.
- PLLA is uniaxially stretched and has piezoelectricity in which the molecules are oriented.
- the piezoelectric film 100 has a piezoelectric constant of d14.
- the uniaxial stretching direction (orientation direction) of the piezoelectric film 100 forms an angle of 45 degrees with respect to each of the vertical direction and the horizontal direction. This 45 degrees includes angles including, for example, about 45 degrees ⁇ 10 degrees. Accordingly, the piezoelectric film 100 generates an electric charge by being deformed such that the piezoelectric film 100 is stretched in the vertical direction or deformed by being stretched in the vertical direction. The piezoelectric film 100 generates a positive electric charge when it is deformed, for example, by being elongated in the vertical direction. For example, the piezoelectric film 100 generates negative charges when deformed so as to be elongated in the left-right direction. The magnitude of the charge depends on the amount of deformation of the piezoelectric film 100 due to stretching or compression. The magnitude of the charge is proportional to the differential value of the amount of deformation of the piezoelectric film 100 due to extension or compression.
- the first electrode 101F is a signal electrode.
- the first electrode 101F is provided on the first main surface F1.
- the first electrode 101F covers the first main surface F1.
- the first electrode 101F is, for example, an organic electrode such as ITO (indium tin oxide) or ZnO (zinc oxide), a metal film by vapor deposition or plating, or a printed electrode film by silver paste.
- the second electrode 101B is a ground electrode.
- the second electrode 101B is connected to ground potential.
- the second electrode 101B is provided on the second main surface F2. Thereby, the piezoelectric film 100 is positioned between the first electrode 101F and the second electrode 101B.
- the second electrode 101B covers the second main surface F2.
- the second electrode 101B is, for example, an organic electrode such as ITO (indium tin oxide) or ZnO (zinc oxide), a metal film by vapor deposition or plating, or a printed electrode film by silver paste.
- Such a sensor 10 is fixed to the striking member 1 via an adhesive layer (not shown). Specifically, the adhesive layer fixes the striking member 1 and the first electrode 101F.
- the adhesive layer fixes the striking member 1 and the first electrode 101F.
- the piezoelectric film 100 expands and contracts in the vertical direction.
- the piezoelectric film 100 generates an electric charge. That is, in this embodiment, the piezoelectric film 100 generates a negative charge when the striking member 1 is bent rightward.
- the piezoelectric film 100 when the striking member 1 is bent leftward, the piezoelectric film 100 generates a positive charge.
- the charge amplifier 102 converts the charge generated by the piezoelectric film 100 into a first signal Sig1, which is a voltage signal. For example, charge amplifier 102 converts the charge to a voltage value in the range of 0.0V to 3.0V. After conversion, the charge amplifier 102 outputs the first signal Sig1 to the voltage amplifier circuit 103 .
- the voltage amplification circuit 103 amplifies the first signal Sig1 and outputs it to the AD converter 20 .
- the processing device 30 determines the swing start time SwT of the hitting member 1 by the user based on the first signal DSig1.
- the processing device 30 includes an arithmetic circuit 300 and a storage device 301, as shown in FIG.
- the storage device 301 stores a program for determining the swing start time SwT.
- the storage device 301 includes, for example, ROM (Read Only Memory) and RAM (Random Access Memory).
- the arithmetic circuit 300 reads the program stored in the ROM to the RAM. Accordingly, the arithmetic circuit 300 performs processing for determining the swing start time SwT.
- Such an arithmetic circuit 300 is, for example, a CPU (Central Processing Unit).
- This process starts when the processing device 30 acquires the first signal DSig1 from the sensor 10 . Specifically, first, the arithmetic circuit 300 acquires the first signal DSig1 from the sensor 10 ( FIG. 5 : step S10).
- the arithmetic circuit 300 determines whether or not there is one or more times when the absolute value of the difference between the reference value SiV and the value of the first signal DSig1 is equal to or greater than the first determination value 1stTh ( FIG. 5 : step S11).
- the arithmetic circuit 300 calculates the absolute value of the difference between the reference value SiV and the value of the first signal DSig1.
- the value of the first signal DSig1 is "3" and the reference value SiV is "2048" will be described below as an example.
- the value obtained by subtracting the reference value SiV from the first signal DSig1 is "-2045". Therefore, the arithmetic circuit 300 calculates the absolute value of the difference as "2045".
- the absolute value of the difference between the reference value SiV and the value of the first signal DSig1 is defined as a first difference value DV1.
- the arithmetic circuit 300 determines whether the first difference value DV1 is greater than or equal to the first determination value 1stTh.
- the first determination value 1stTh is a value stored in the processing device 30 .
- FIG. 4 An example of FIG. 4 will be described below.
- the first signal DSig1 is "3" or less.
- the reference value SiV is "2048”. Therefore, the first difference value DV1 is "2045".
- the first determination value 1stTh is "2045". Therefore, at time TT, the first difference value DV1 is greater than or equal to the first determination value 1stTh.
- the arithmetic circuit 300 determines the time TT as the time when the absolute value of the difference between the reference value SiV and the value of the first signal DSig1 becomes equal to or greater than the first determination value 1stTh.
- the time when the first difference value DV1 becomes equal to or greater than the first determination value 1stTh will be referred to as the first time.
- step S11 No When the arithmetic circuit 300 determines that there is no time at which the first difference value DV1 is equal to or greater than the first determination value 1stTh at one time or more ( FIG. 5 : step S11 No), the processing device 30 performs step S10. Return processing to before .
- the arithmetic circuit 300 determines that there is one or more times at which the first difference value DV1 is equal to or greater than the first judgment value 1stTh (FIG. 5: step S11 Yes)
- the arithmetic circuit 300 performs the first A first determination step of determining the time at which the first difference value DV1 becomes the largest among the one or more times at which the difference value DV1 becomes equal to or greater than the first determination value 1stTh as the impact time InT is executed (FIG. 5: step S12).
- the arithmetic circuit 300 determines the time TT as the first time.
- the arithmetic circuit 300 does not determine a time other than the time TT as the first time. Therefore, the time at which the first difference value DV1 becomes the largest among the one or more times is the time TT.
- the arithmetic circuit 300 determines the time TT as the impact time InT.
- the arithmetic circuit 300 identifies the swing start time SwT by examining the first signal DSig1 acquired at the time BeTime before the impact time InT. Specifically, in the first signal DSig1 acquired at the time BeTime prior to the impact time InT, the arithmetic circuit 300 detects one or more periods in which the first difference value DV1 is below the second determination value 2ndTh over the reference time. A first identification step is executed to identify the most recent period MPE closest to the impact time InT from among the PEs (step S13 in FIG. 5). The first identifying step will be described in detail below.
- the arithmetic circuit 300 identifies one or more periods PE in which the first difference value DV1 is below the second determination value 2ndTh over the reference time at the time BeTime before the impact time InT.
- the value of the second determination value 2ndTh is smaller than the value of the first determination value 1stTh.
- the processing device 30 stores the second determination value 2ndTh as "200". In this case, if the first difference value DV1 is "200" or less, the arithmetic circuit 300 determines that the first difference value DV1 is less than the second determination value 2ndTh.
- the reference time is set to 0.2 seconds, 0.3 seconds, or the like, for example.
- the arithmetic circuit 300 sets the period in which the first difference value DV1 is lower than the second determination value 2ndTh for 0.2 seconds as the period PE Identify as The arithmetic circuit 300 identifies one or more periods PE. Specifically, after identifying the first period PE, the arithmetic circuit 300 identifies whether the period PE exists at a time after the first identified period PE. For example, as shown in FIG. 4, the arithmetic circuit 300 identifies the period PE1 as the period PE. In the example shown in FIG. 4, the period PE exists at a time later than the period PE1. In this case, the arithmetic circuit 300 identifies the period PE that occurred after the period PE1 as the period PE2.
- the arithmetic circuit 300 identifies the most recent period MPE closest to the impact time InT from among one or more periods PE. For example, in the example shown in FIG. 4, the arithmetic circuit 300 identifies periods PE1 and PE2. As shown in FIG. 4, the period PE2 is closer to the impact time InT than the period PE1. Therefore, the arithmetic circuit 300 identifies the period PE2 as the latest period MPE.
- the arithmetic circuit 300 executes a second identification step of identifying the swing start time SwT based on the latest period MPE (step S14 in FIG. 5). For example, the arithmetic circuit 300 identifies the time from the earliest time to the latest time in the latest period MPE as the swing start time SwT. Specifically, when the earliest time in the latest period MPE is 5.0 seconds and the latest time is 5.2 seconds, the arithmetic circuit 300 sets the swing start time SwT to 5.0 seconds. Specify between seconds and 5.2 seconds.
- the processing device 30 identifies the swing start time SwT.
- the arithmetic circuit 300 repeats the processing from step S10 to step S14.
- the processing device 30 inputs a second signal that simulates the first signal DSig1.
- the second signal has an impact period and a preliminary operation period.
- the impact period is a period located after the preliminary operation period.
- the value of the second signal in the preliminary operation period is set to the reference value SiV. Specifically, as in the example shown in FIG. 4, the value of the second signal is set to "2048" or the like, which is the reference value SiV. Next, the value of the second signal is gradually increased during the impact period. Then, when the value of the second signal reaches or exceeds a predetermined value, the processing device 30 specifies the swing start time SwT. Specifically, when the value of the second signal is increased during the impact period, the first difference value DV1 becomes greater than or equal to the first determination value 1stTh. At this time, the value of the second signal in the preliminary operation period is the reference value SiV.
- the processing device 30 satisfies the conditions for executing the first identifying step and the second identifying step. As a result, the processing device 30 identifies the swing start time SwT. That is, the first determination value 1stTh is specified by specifying the value of the second signal when the processing device 30 specifies the swing start time SwT.
- the second determination value 2ndTh is specified after the first determination value 1stTh is specified. Specifically, after specifying the first determination value 1stTh, the magnitude of the value of the second signal in the preliminary operation period is gradually increased. Then, when the value of the second signal reaches or exceeds a predetermined value, the processing device 30 stops specifying the swing start time SwT. Specifically, when the value of the second signal is decreased during the preliminary operation period, the first difference value DV1 becomes equal to or greater than the second determination value 2ndTh. Therefore, the processing device 30 no longer satisfies the conditions for executing the first specific step. As a result, the processing device 30 no longer specifies the swing start time SwT. That is, the second determination value 2ndTh is specified by specifying the value of the second signal when the processing device 30 no longer specifies the swing start time SwT.
- the reference time is specified after the second determination value 2ndTh is specified. Specifically, the time during which the second signal is output during the preliminary operation period is gradually shortened while the value of the second signal during the preliminary operation period is made smaller than the second determination value 2ndTh.
- the time during which the second signal is output during the preliminary operation period will be referred to as the second time.
- the processing device 30 stops specifying the swing start time SwT. Specifically, when the second time is shortened, the second time becomes shorter than the reference time.
- the condition that the first difference value DV1 is equal to or less than the second determination value 2ndTh over the reference time is no longer satisfied. That is, the processing device 30 no longer satisfies the conditions for executing the first specific step. As a result, the processing device 30 no longer specifies the swing start time SwT. That is, the reference time is specified by specifying the length of the second time when the processing device 30 no longer specifies the swing start time SwT.
- the first judgment value 1stTh, the second judgment value 2ndTh, and the reference time can be specified.
- the first determination value 1stTh, the second determination value 2ndTh, and the reference time it can be considered that the processing shown in this embodiment has been executed.
- the processing device 30 includes an arithmetic circuit 300 .
- the arithmetic circuit 300 determines the swing start time based on the first signal Sig1 acquired from the sensor 10 that detects the deformation of the striking member 1 during the swing. More specifically, the arithmetic circuit 300 executes the first determination step of determining the time when the value of the first signal DSig1 becomes equal to or greater than the first determination value 1stTh as the impact time InT.
- the arithmetic circuit 300 determines that the value of the first signal DSig1 is less than the second determination value 2ndTh for one or more periods PE. Among them, a first identification step is performed to identify the most recent period MPE closest to the impact time InT. Finally, arithmetic circuit 300 executes a second identification step of identifying swing start time SwT based on latest period MPE.
- the processing device 30 will be compared with the processing device (hereinafter referred to as Comparative Example 1) that specifies the time when the acquired signal exceeds the determination value as the swing start time.
- the determination value is set based on the magnitude of the signal generated at the start of the swing. Thereby, the time when the value of the signal obtained from the sensor exceeds the judgment value is detected as the swing start time.
- the user may give an impact to the striking member by actions other than the swing. For example, an impact is applied to the striking member by an action of the user accidentally knocking down the striking member. In this case, there is a possibility that a force of the same degree as the force generated by the swing will be applied to the striking member.
- Comparative Example 1 there is a possibility that a motion other than the swing is erroneously determined as the start of the swing. Therefore, Comparative Example 1 cannot accurately detect the moment when the user starts swinging the striking member.
- the processing device 30 identifies the swing start time SwT after identifying the impact time InT.
- the time when the greatest force is applied to the striking member 1 is the moment of impact. Therefore, when the first determination value 1stTh is set according to the magnitude of the impact, there is a low possibility that the impact time InT will be erroneously determined.
- the processing device 30 specifies the swing start time SwT. Therefore, even if a force is applied to the striking member 1 by an action other than swing, the possibility of the processing device 30 erroneously judging the swing action is low. Therefore, the processing device 30 can accurately detect the moment when the user starts swinging the striking member 1 .
- the processing device 30 can accurately detect the moment when the user starts swinging the striking member 1. More specifically, in the first signal DSig1 acquired at the time BeTime before the impact time InT, the arithmetic circuit 300 determines that the first difference value DV1 is less than the second determination value 2ndTh for one or more periods PE , a first identification step of identifying the most recent period MPE closest to the impact time InT. Further, the arithmetic circuit 300 executes a second identifying step of identifying the swing start time SwT based on the most recent period MPE. The swing start time SwT is located before the impact time InT. No large force is applied to the striking member 1 at the swing start time SwT.
- the swing start time SwT can be specified by specifying a period in which the first difference value DV1 is small at a time before the impact time InT.
- the arithmetic circuit 300 may identify one or more periods PE at a time before the impact time InT.
- the period PE before the swing start time SwT is a period in which the first difference value DV1 is small because the striking member 1 is stationary. That is, there is a high possibility that the period PE far from the impact time InT is not the swing start time SwT. Therefore, the arithmetic circuit 300 performs processing to identify the most recent period MPE closest to the impact time InT.
- the processing device 30 can accurately detect the moment when the user starts swinging the striking member 1 .
- the processing device 30 it is possible to accurately detect the moment when the user starts swinging the striking member 1.
- the processing device 30 specifies the swing start time SwT according to the deformation of the striking member 1 . That is, when the striking member 1 is likely to deform, the processing device 30 is likely to identify the swing start time SwT.
- a golf club is a hitting member 1 that is easily deformed during a swing. That is, the processing device 30 in which the hitting member 1 is a golf club can detect the moment when the user starts swinging the hitting member 1 with particularly high accuracy.
- FIG. 6 is a flow chart showing the processing executed by the processing device 30a.
- FIG. 7 is a diagram showing an example of the third specifying step executed by the arithmetic circuit 300a.
- the processing device 30a differs from the processing device 30 in that it executes the third identifying step after the second identifying step.
- the processing device 30a includes an arithmetic circuit 300a. After executing the second identifying step (FIG. 6: after step S14), the arithmetic circuit 300a further executes the third identifying step (FIG. 6: step S21).
- the third identification step is a step of identifying the time MTT furthest from the impact time InT in the most recent period MPE closest to the impact time InT as the swing start time SwT.
- the arithmetic circuit 300a acquires the value of the first signal DSig1 at each of times T1 to T6 in the latest period MPE.
- the arithmetic circuit 300a acquires the value of the first signal DSig1 in order of times T1, T2, T3, T4, T5, and T6.
- the time T1 is the farthest from the impact time InT among the times T1 to T6.
- the time T1 is the furthest from the impact time InT in the latest period MPE.
- the arithmetic circuit 300a specifies the time T1 as the swing start time SwT.
- a program for executing the third specifying step is stored in a storage device 301a (not shown) included in the processing device 30a.
- the processing device 30a According to the processing device 30a, the moment when the user starts swinging the striking member 1 can be detected with even higher accuracy. More specifically, the arithmetic circuit 300a further executes a third identification step of identifying the time MTT furthest from the impact time InT in the most recent period MPE closest to the impact time InT as the swing start time SwT. Thereby, the swing start time SwT can be narrowed down to one time. Therefore, the moment when the user starts swinging the striking member 1 can be detected with higher accuracy.
- the processing device 30a can accurately analyze the user's swing. More specifically, the arithmetic circuit 300a further executes a third identification step of identifying the time MTT furthest from the impact time InT in the most recent period MPE closest to the impact time InT as the swing start time SwT. This makes it possible to accurately identify the time from the swing start time SwT to the impact time InT. Therefore, it is possible to accurately identify the first signal DSig1 generated from the time the user starts swinging until the time the user hits the object. As a result, the arithmetic circuit 300a can accurately analyze the user's swing by using the accurately identified first signal DSig1 for analysis of the user's swing.
- FIG. 8 is a flow chart showing the processing executed by the processing device 30b.
- the processing device 30b differs from the processing device 30 in that processing is added between the first determination step and the first identification step. Specifically, the processing device 30b includes an arithmetic circuit 300b (not shown). If the value of the first signal DSig1 acquired at the time BeTime before the impact time InT does not fall below the second determination value 2ndTh for the reference time, the arithmetic circuit 300b identifies the most recent period MPE closest to the impact time InT. do not do.
- the arithmetic circuit 300b determines whether the value of the first signal DSig1 is lower than the second determination value 2ndTh for the reference time ( FIG. 8: step S31). If the value of the first signal DSig1 is lower than the second determination value 2ndTh for the reference time (FIG. 8: step S31 Yes), the arithmetic circuit 300b executes the first specific step (FIG. 8: step S13). If the value of the first signal DSig1 is not less than the second determination value 2ndTh for the reference time ( FIG. 8 : step S31 No), the arithmetic circuit 300b returns the processing to before step S10.
- the processing device 30b can improve the processing speed of the processing device 30b. More specifically, if the value of the first signal DSig1 acquired at the time BeTime before the impact time InT does not fall below the second determination value 2ndTh for the reference time, the calculation circuit 300b determines the value closest to the impact time InT. Do not specify the recent period MPE. If the value of the first signal DSig1 has not fallen below the second determination value 2ndTh for the reference time, there is a possibility that the processing device 30b has erroneously detected the impact time InT. In this case, the processing device 30b does not execute the second identifying step. Therefore, the processing device 30b can quickly terminate the processing caused by the erroneous detection. That is, the processing speed of the processing device 30b is improved.
- FIG. 9 is a graph showing an example of the swing start time SwT specified by the processing of the arithmetic circuit 300c.
- the vertical axis indicates signal output.
- the horizontal axis indicates time.
- FIG. 10 is a flow chart showing the processing executed by the processing device 30c.
- the processing device 30c differs from the processing device 30 in that the method of specifying the swing start time SwT is different.
- the processing device 30c includes an arithmetic circuit 300c.
- the arithmetic circuit 300c specifies the swing start time SwT by a method different from that of the arithmetic circuit 300.
- FIG. hereinafter, in the configuration of the processing device 30c, the same configurations as those of the processing device 30 are denoted by the same reference numerals, and descriptions thereof are omitted.
- the arithmetic circuit 300c identifies the swing start time SwT by identifying the time when the first signal DSig1 crosses the reference value SiV.
- the crossing of the first signal DSig1 with the reference value SiV specifically means that the value of the first signal DSig1 changes from being above the reference value SiV to being below the reference value SiV, or is changed from being below the reference value SiV to being above the reference value SiV.
- the time when the value of the first signal DSig1 changes from being above the reference value SiV to being below the reference value SiV, or when the value of the first signal DSig1 changes from being below the reference value SiV to being above the reference value SiV. Define the time as cross time XT.
- the arithmetic circuit 300c After the first determination step (after step S12 in FIG. 10), the arithmetic circuit 300c identifies one or more cross times XT in the first signal DSig1 acquired in the period BeTime before the impact time InT. A specific step is executed (Fig. 10 step S43). In the example shown in FIG. 9, the first signal DSig1 crosses the reference value SiV at times X1 to X6. In this case, arithmetic circuit 300c specifies times X1 to X6 as cross times XT. The times X6 to X1 are close to the impact time InT in this order.
- the arithmetic circuit 300c executes a second identification step of identifying the swing start time SwT based on the cross time XT closest to the impact time InT by the reference number among the one or more cross times XT.
- the fourth closest cross time XT to the impact time InT is time X3. Therefore, the arithmetic circuit 300c specifies the time X3 as the swing start time SwT.
- the arithmetic circuit 300c repeats the processes of steps S10 to S12, S43, and S44, as shown in FIG.
- the processing device 30c includes an arithmetic circuit 300c.
- the arithmetic circuit 300c determines the swing start time based on the first signal DSig1 acquired from the sensor 10 that detects the deformation of the striking member 1 during the swing. More specifically, the arithmetic circuit 300c executes the first determination step of determining the impact time InT when the value of the first signal DSig1 becomes equal to or greater than the first determination value 1stTh.
- the arithmetic circuit 300c executes a first identification step of identifying one or more cross times XT in the first signal DSig1 acquired in the period BeTime before the impact time InT.
- the arithmetic circuit 300c executes a second identification step of identifying the swing start time SwT based on the cross time XT that is closest to the impact time InT by the reference number among the one or more cross times XT.
- the processing device 30c identifies the swing start time SwT after identifying the impact time InT. The time when the greatest force is applied to the striking member 1 is the moment of impact.
- the processing device 30c specifies the swing start time SwT. Therefore, even if force is applied to the striking member 1 by an action other than swing, the possibility of the processing device 30c erroneously judging the swing action is low. Therefore, the processing device 30c can accurately detect the moment when the user starts swinging the striking member 1 .
- the processing device 30c includes an arithmetic circuit 300c.
- the arithmetic circuit 300c determines the swing start time based on the first signal DSig1 acquired from the sensor 10 that detects the deformation of the striking member 1 during the swing. More specifically, the arithmetic circuit 300c performs a first identification step of identifying one or more cross times XT in the first signal DSig1 acquired in the period BeTime before the impact time InT.
- the arithmetic circuit 300c executes a second identification step of identifying the swing start time SwT based on the cross time XT that is closest to the impact time InT by the reference number among the one or more cross times XT.
- the reference number is set as follows. The number of cross times XT that occur from the start of the swing until the user hits the object is set as the reference number.
- the swing start time SwT can be easily identified by back-calculating the cross time XT closest to the reference number from the impact time InT. Therefore, the processing device 30c can easily detect the moment when the user starts swinging the striking member 1 .
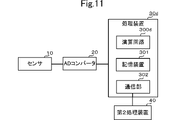
- FIG. 11 is a diagram showing an example of communication between the processing device 30d and the second processing device 40. As shown in FIG.
- the processing device 30d differs from the processing devices 30 and 30b in that it includes a communication unit 302 .
- the second processing device 40 is, for example, a swing analysis device.
- the swing analysis device analyzes the user's swing based on the first signal DSig1, for example.
- the processing device 30d is attached to the striking member 1 .
- the second processing device 40 is not attached to the striking member 1 . That is, the communication unit 302 performs communication between the processing device 30 d attached to the striking member 1 and the second processing device 40 not attached to the striking member 1 .
- Communication by the communication unit 302 is, for example, wireless communication.
- Wireless communication is, for example, communication using Bluetooth (registered trademark).
- the processing device 30d can accurately analyze the swing of the user. More specifically, the processing device 30 d has a communication unit 302 .
- the processing device 30d is attached to the striking member 1.
- the communication unit 302 transmits the swing start time SwT to the second processing device 40 different from the processing device 30d.
- the second processing device 40 can acquire the accurately specified swing start time SwT and impact time InT.
- the second processing device 40 can infer that the first signal DSig1 positioned between the swing start time SwT and the impact time InT is the first signal DSig1 generated when the user swings.
- the second processing device 40 is less likely to analyze the user's swing based on the first signal DSig1 generated by an action other than the swing.
- the processing device 30d allows the second processing device 40 to accurately analyze the user's swing.
- FIG. 12 is a diagram showing an example of a deletion step executed by the processing device 30e.
- the dot pattern indicates the period during which the first signal DSig1 is deleted.
- the processing device 30e differs from the processing devices 30 and 30b in that unnecessary signals are deleted from the acquired first signal DSig1. Specifically, the processing device 30e executes a deletion step of deleting the first signal DSig1 acquired at a time before the swing start time SwT.
- a storage device 301e (not shown) of the processing device 30e stores a program for executing the deletion step.
- the processing device 30e identifies the most recent period MPE that includes the swing start time SwT.
- the first signal DSig1 obtained at a time before the swing start time SwT is obtained at a time before the latest period MPE. Therefore, as shown in FIG. 12, the processing device 30e deletes the first signal DSig1 acquired in the period DeA earlier than the latest period MPE.
- the processing speed of the processing device 30e is improved. Specifically, the processing device 30e executes a deletion step of deleting the first signal DSig1 acquired at a time before the swing start time SwT. In this case, the first signal DSig1 other than the signal necessary for analyzing the user's swing is deleted. A case where the processing device 30e transmits the first signal DSig1 to the swing analysis device will be described below as an example. In this case, the processing device 30e converts the first signal DSig1 into data that can be transmitted to the swing analysis device. At this time, by executing the deletion step, the size of the data to be transmitted to the swing analysis device can be reduced. Therefore, it is possible to shorten the time until the data transmission to the swing analysis device in the processing device 30e is completed. That is, the processing speed of the processing device 30e is improved.
- the processing apparatuses 30 to 30e according to the present invention are not limited to the processing apparatuses 30 to 30e, and can be modified within the scope of the subject matter. Note that the configurations of the processing devices 30 to 30e may be combined arbitrarily.
- the processing devices 30 to 30c and 30e do not necessarily have to be attached to the striking member 1.
- a striking member communication section is attached to the striking member 1 .
- the striking member communication section may transmit the first signal DSig1 acquired from the sensor 10 to the processing devices 30 to 30c and 30e.
- the processing devices 30 to 30c and 30e may be terminals such as servers and smart phones. If the processing devices 30 to 30c, 30e are, for example, servers, smart phones, etc., the servers, smart phones, etc. execute the first determining step, the first identifying step, and the second identifying step.
- the hitting member 1 does not necessarily have to be a golf club.
- the striking member 1 may be a rod-shaped member such as a baseball bat, tennis racket, badminton racket, or the like.
- the striking member 1 may include at least one of a golf club, bat and racket.
- bats and rackets are striking members 1 that are easily deformed during a swing. That is, when the hitting member 1 is a bat or a racket, the processing device 30 can detect the moment when the user starts swinging the hitting member 1 with particularly high accuracy.
- the processing devices 30 to 30e determine the impact time InT based on the first difference value DV1 in the first determination step.
- the first difference value DV1 is the absolute value of the difference between the value of the first signal DSig1 and the reference value SiV. That is, the processing devices 30 to 30e can determine the swing start time SwT even when the waveform of the first signal DSig1 is inverted with respect to the reference value SiV. Therefore, the processing devices 30 to 30e can determine the swing start time SwT even when the user reverses the striking member 1 for each swing. For example, if the hitting member 1 is a bat, a racket, or the like, the user may invert the hitting member 1 with each swing.
- the processing devices 30 to 30e can accurately detect the swing start time SwT of each swing. Similarly, the processing devices 30 to 30e can accurately determine the swing start time SwT even when the user changes the direction in which the striking member 1 is swung for each swing.
- the processing device 30 identifies one or more periods PE in which the first difference value DV1 is less than the second determination value 2ndTh over the reference time.
- the processing device 30 may specify the period PE using the reference number of sampling instead of the reference time.
- the arithmetic circuit 300 identifies the number of times the first difference value DV1 has continuously fallen below the second determination value 2ndTh in the first identification step. Then, the arithmetic circuit 300 identifies a period during which the number of times the first difference value DV1 has been consecutively less than the second determination value 2ndTh exceeds the reference sampling number as the period PE.
- the reference sampling number is set in the processing device 30 .
- the reference sampling number is set to 5 times, 6 times, or the like in the processing device 30, for example. For example, when the processing device 30 sets the number of samplings to 5, the processing device 30 identifies a period during which the first difference value DV1 is less than the second determination value 2ndTh five consecutive times as the period PE.
- the hitting member 1 in the first embodiment or the second embodiment is a golf club. Therefore, the hit object in the first embodiment or the second embodiment is, for example, a golf ball.
- the communication by the communication unit 302 may be wired communication.
- the processing device 30d does not necessarily have to execute the deletion step based on the latest period MPE. For example, when the processing device 30d executes the third identifying step, the processing device 30d may delete the first signal DSig1 acquired at a time before the swing start time SwT identified by the third identifying step. good.
- the processing devices 30 to 30e do not necessarily have to input the signal AD-converted by the AD converter 20.
- the processing devices 30 to 30e may perform AD conversion processing.
- the processing units 30 to 30e receive analog signals from the sensor 10.
- FIG. The processors 30 to 30e AD-convert analog signals.
- the processing devices 30 to 30e specify the impact time InT and the swing start time SwT based on the first signal DSig1 obtained by AD conversion.
- the deformation direction of the striking member 1 is not limited to the vertical direction only.
- the striking member 1 may be deformed in a rotational direction around the center of the striking member 1 when viewed in the vertical direction. That is, the striking member 1 may be twisted in the direction of rotation.
- the sensor 10 may detect twist in the rotational direction.
- the value of the first signal DSig1 does not necessarily have to be the differential value of the deformation amount of the striking member 1.
- the value of the first signal DSig1 may be the amount of deformation of the striking member 1 .
- sensor 10 comprises a strain sensor.
- the value of the first signal DSig1 is the amount of deformation of the striking member 1
- the value of the first signal DSig1 may be the amount of deformation in a direction other than the lateral direction.
- the number of period PEs specified by the arithmetic circuit 300 is not limited to the two examples shown in FIG.
- the period PE specified by the arithmetic circuit 300 may be one. In this case, one period PE is the most recent period MPE. Also, the period PE specified by the arithmetic circuit 300 may be 3 or more. In this case, the arithmetic circuit 300 identifies the most recent period MPE closest to the impact time InT from among the three or more periods PE.
- the first determination value 1stTh does not necessarily have to be "2045".
- the arithmetic circuit 300 does not have to specify the swing start time SwT based on the first signal DSig1 converted into a bit value.
- the arithmetic circuit 300 may specify the swing start time SwT based on the first signal DSig1 converted to a voltage value of 0-3V.
- the first determination value 1stTh and the second determination value 2ndTh are set in the range of 0-3V.
- the arithmetic circuit 300 may identify the periods PE in order of proximity from the impact time InT. For example, after identifying the first period PE, the arithmetic circuit 300 may identify whether the period PE exists at a time before the first identified period PE. In this case, for example, the arithmetic circuit 300 identifies the period PE1 as the period PE. Then, when the period PE exists at the time before the period PE1, the arithmetic circuit 300 may specify the period PE that exists at the time before the period PE1 as the period PE2.
- the processing devices 30 to 30c and 30e do not necessarily have to include the communication unit 302.
- the communication unit 302 may transmit the swing start time SwT to a plurality of second processing devices 40 .
- the communication unit 302 does not necessarily have to transmit the swing start time SwT to the second processing device 40 .
- the arithmetic circuits 300 to 300e do not necessarily have to be CPUs.
- the arithmetic circuits 300 to 300e may be MPUs (Micro Processing Units), for example.
- the storage device 301 does not necessarily have to include a ROM.
- the storage device 301 may include, for example, flash memory instead of ROM.
- the charge amplifier 102 does not necessarily convert the charge into a voltage value within the range of 0.0V to 3.0V.
- Charge amplifier 102 may convert the charge to a voltage value in a range other than 0.0V to 3.0V.
- the charge amplifier 102 may, for example, convert the charge to a range of 0.0V to 1.5V, a range of 0.0V to 5.0V, or the like.
- the resolution of the AD converter 20 is not limited to only 12 bits.
- the resolution of the AD converter 20 may be a bit value other than 12 bits.
- the resolution of the AD converter 20 may be, for example, 10-bit value, 16-bit value, or the like.
- the processing devices 30 to 30e may execute the first determination step of determining the impact time InT based on one or more times when the first difference value DV1 becomes equal to or greater than the first determination value 1stTh.
- the processing devices 30e to 30e necessarily determine that the first difference value DV1 is the largest among one or more times when the first difference value DV1 becomes equal to or greater than the first determination value 1stTh. It is not necessary to determine the time when it becomes the impact time InT.
- the processing devices 30e to 30e may determine, for example, the time when the first difference value DV1 becomes equal to or greater than the first determination value 1stTh as the impact time InT.
- the processing devices 30e to 30e identify the time when the first difference value DV1 becomes equal to or greater than the first determination value 1stTh, the processing devices 30e to 30e determine that the first difference value DV1 is equal to or greater than the first determination value.
- the time at which it becomes 1stTh or more may be determined as the impact time InT. Also in this case, the processing devices 30 to 30e can accurately detect the moment when the user starts swinging the striking member 1.
- Striking member 10 Sensor 100: Piezoelectric film 101F: First electrode 101B: Second electrode 102: Charge amplifier 103: Voltage amplification circuit 20: AD converters 30 to 30e: Processing devices 300 to 300e: Arithmetic circuit 301: Storage device Sig1, DSig1: first signals PE, PE1, PE2: period MPE: latest period InT: impact time SwT: swing start time 1stTh: first judgment value 2ndTh: second judgment value DV1: first difference value XT: cross time
Landscapes
- Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- General Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Business, Economics & Management (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- Entrepreneurship & Innovation (AREA)
- Electrophonic Musical Instruments (AREA)
- Investigating Strength Of Materials By Application Of Mechanical Stress (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023525659A JP7401026B2 (ja) | 2021-05-31 | 2022-04-22 | 処理装置 |
| US18/522,834 US20240091620A1 (en) | 2021-05-31 | 2023-11-29 | Processing device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021090926 | 2021-05-31 | ||
| JP2021-090926 | 2021-05-31 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/522,834 Continuation US20240091620A1 (en) | 2021-05-31 | 2023-11-29 | Processing device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022254996A1 true WO2022254996A1 (ja) | 2022-12-08 |
Family
ID=84323163
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/018560 Ceased WO2022254996A1 (ja) | 2021-05-31 | 2022-04-22 | 処理装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20240091620A1 (https=) |
| JP (1) | JP7401026B2 (https=) |
| WO (1) | WO2022254996A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7553914B1 (ja) | 2024-05-28 | 2024-09-19 | 株式会社Gpro | 打球パラメータ測定装置及び打球パラメータ測定方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022239433A1 (ja) * | 2021-05-11 | 2022-11-17 | 株式会社村田製作所 | センサユニット |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012254206A (ja) * | 2011-06-09 | 2012-12-27 | Seiko Epson Corp | スイング分析装置、スイング分析プログラム、および記録媒体 |
| JP2013208362A (ja) * | 2012-03-30 | 2013-10-10 | Dunlop Sports Co Ltd | ゴルフスイングにおけるインパクト時間の抽出方法 |
| US20160084869A1 (en) * | 2014-09-23 | 2016-03-24 | Fitbit, Inc. | Hybrid angular motion sensors |
| JP2016066127A (ja) * | 2014-09-22 | 2016-04-28 | カシオ計算機株式会社 | 画像処理装置、画像処理方法及びプログラム |
| US20180021653A1 (en) * | 2016-07-19 | 2018-01-25 | Blast Motion Inc. | Swing analysis method using a sweet spot trajectory |
| JP2018175496A (ja) * | 2017-04-14 | 2018-11-15 | 美津濃株式会社 | スイング解析装置、スイング解析方法、およびスイング解析システム |
| US20200193864A1 (en) * | 2017-09-08 | 2020-06-18 | Intel Corporation | Sensor-derived swing hit and direction detection |
-
2022
- 2022-04-22 WO PCT/JP2022/018560 patent/WO2022254996A1/ja not_active Ceased
- 2022-04-22 JP JP2023525659A patent/JP7401026B2/ja active Active
-
2023
- 2023-11-29 US US18/522,834 patent/US20240091620A1/en active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012254206A (ja) * | 2011-06-09 | 2012-12-27 | Seiko Epson Corp | スイング分析装置、スイング分析プログラム、および記録媒体 |
| JP2013208362A (ja) * | 2012-03-30 | 2013-10-10 | Dunlop Sports Co Ltd | ゴルフスイングにおけるインパクト時間の抽出方法 |
| JP2016066127A (ja) * | 2014-09-22 | 2016-04-28 | カシオ計算機株式会社 | 画像処理装置、画像処理方法及びプログラム |
| US20160084869A1 (en) * | 2014-09-23 | 2016-03-24 | Fitbit, Inc. | Hybrid angular motion sensors |
| US20180021653A1 (en) * | 2016-07-19 | 2018-01-25 | Blast Motion Inc. | Swing analysis method using a sweet spot trajectory |
| JP2018175496A (ja) * | 2017-04-14 | 2018-11-15 | 美津濃株式会社 | スイング解析装置、スイング解析方法、およびスイング解析システム |
| US20200193864A1 (en) * | 2017-09-08 | 2020-06-18 | Intel Corporation | Sensor-derived swing hit and direction detection |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7553914B1 (ja) | 2024-05-28 | 2024-09-19 | 株式会社Gpro | 打球パラメータ測定装置及び打球パラメータ測定方法 |
| WO2025249339A1 (ja) * | 2024-05-28 | 2025-12-04 | 株式会社Gpro | 打球パラメータ測定装置及び打球パラメータ測定方法 |
| JP2025179703A (ja) * | 2024-05-28 | 2025-12-10 | 株式会社Gpro | 打球パラメータ測定装置及び打球パラメータ測定方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2022254996A1 (https=) | 2022-12-08 |
| JP7401026B2 (ja) | 2023-12-19 |
| US20240091620A1 (en) | 2024-03-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7401026B2 (ja) | 処理装置 | |
| TW201500090A (zh) | 運動解析方法及運動解析裝置 | |
| US20140100050A1 (en) | Golf swing analyzing apparatus and method of analyzing golf swing | |
| JP5773144B2 (ja) | 運動解析装置、運動解析システム、運動解析プログラム、および、記録媒体 | |
| JP5773122B2 (ja) | スイング分析装置及びスイング分析プログラム | |
| CN104645585A (zh) | 运动分析方法以及运动分析装置 | |
| JP2016067410A (ja) | 運動解析装置、運動解析システム、運動解析方法及びプログラム | |
| JP2013244405A (ja) | テニスラケットを使用するときの再現性指標を計算するための方法 | |
| JP7473086B2 (ja) | データ処理装置及びプログラム | |
| JP2018171244A (ja) | ゴルフクラブシャフトフィッティングシステム、情報処理装置及び方法 | |
| JPWO2022254996A5 (https=) | ||
| JP7448096B2 (ja) | センサユニット | |
| JP6300196B2 (ja) | 運動具挙動解析装置、運動具挙動解析方法および運動具挙動解析プログラム | |
| US20230381615A1 (en) | Hit position estimation device and hit position estimation method | |
| CN103657052B (zh) | 状态确定装置及状态确定方法 | |
| JP7582347B2 (ja) | インパクト検出装置、インパクト検出方法 | |
| TWI788226B (zh) | 擊球運動器材擊球點位置偵測方法及裝置 | |
| JP2017108871A (ja) | 身体情報生成装置 | |
| JP7459980B2 (ja) | グリップ力推定装置、グリップ力推定方法 | |
| JP7582552B2 (ja) | 演算回路及び演算プログラム | |
| TWI541050B (zh) | 矯正打擊姿勢之裝置及方法 | |
| JP6881319B2 (ja) | 情報処理装置、情報処理方法および記憶媒体 | |
| CN201210107Y (zh) | 高尔夫球杆特性测量装置 | |
| JP2016209122A (ja) | 打撃解析装置、打撃解析システム、打撃解析方法、及びプログラム | |
| JP2018027188A (ja) | スポーツ打具判定システム及びスポーツ打具判定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22815752 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023525659 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 22815752 Country of ref document: EP Kind code of ref document: A1 |