WO2022244233A1 - 車両用操舵システム - Google Patents
車両用操舵システム Download PDFInfo
- Publication number
- WO2022244233A1 WO2022244233A1 PCT/JP2021/019360 JP2021019360W WO2022244233A1 WO 2022244233 A1 WO2022244233 A1 WO 2022244233A1 JP 2021019360 W JP2021019360 W JP 2021019360W WO 2022244233 A1 WO2022244233 A1 WO 2022244233A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- control amount
- steering
- steering control
- limit value
- vehicle
- Prior art date
Links
- 230000001133 acceleration Effects 0.000 claims abstract description 123
- 238000001514 detection method Methods 0.000 abstract description 8
- 238000010586 diagram Methods 0.000 description 9
- 238000000034 method Methods 0.000 description 7
- 230000006870 function Effects 0.000 description 5
- 208000019901 Anxiety disease Diseases 0.000 description 3
- 230000036506 anxiety Effects 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/008—Control of feed-back to the steering input member, e.g. simulating road feel in steer-by-wire applications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/025—Active steering aids, e.g. helping the driver by actively influencing the steering system after environment evaluation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/002—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits computing target steering angles for front or rear wheels
- B62D6/003—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits computing target steering angles for front or rear wheels in order to control vehicle yaw movement, i.e. around a vertical axis
Definitions
- the present application relates to a vehicle steering system, and more particularly to a vehicle steering system that assists a steering operation so that the vehicle follows a target travel line.
- Patent Document 1 there is a technology for controlling steering so that the vehicle runs in the center of the lane by recognizing white lines on the road using a camera attached to the front of the vehicle, as in Patent Document 1 (hereinafter referred to as a lane keeping system). ).
- Patent Document 2 a target trajectory is calculated by grasping the vehicle position, a target point preset by the driver, map data, etc. from satellite information, and steering control is performed so as to follow the target trajectory.
- a target trajectory is calculated by grasping the vehicle position, a target point preset by the driver, map data, etc. from satellite information, and steering control is performed so as to follow the target trajectory.
- the vehicle steering system performs abrupt steering depending on the target travel line in order to assist steering so as to follow the target travel line based on camera or satellite information.
- the lateral acceleration of the vehicle increases, giving the driver a feeling of uneasiness or discomfort.
- the driver feels remarkably uneasy and uncomfortable.
- the present invention has been made in order to solve the above problems, and aims to provide a vehicle steering system that reduces the burden on the driver caused by the driver's anxiety and discomfort. do.
- a vehicle steering system disclosed in the present application includes a steering control amount calculation unit that calculates a steering control amount for bringing the vehicle closer to a target travel line, a lateral acceleration detection unit that detects the lateral acceleration of the vehicle, and a steering control unit based on the lateral acceleration.
- a steering control amount limit value calculation unit that calculates a steering control amount limit value that limits the lateral acceleration to the lateral acceleration limit value, and a limit determination unit that determines whether the steering control amount limit is valid or invalid based on at least the lateral acceleration.
- a steering control amount limiting section that limits the steering control amount when the limitation determination section determines that the limitation is effective based on the steering control amount limit value.
- the steering control amount limit value that limits the lateral acceleration of the vehicle to the lateral acceleration limit value is calculated, and the steering control amount is limited based on the steering control amount limit value. Therefore, it is possible to uniformly limit the lateral angular velocity of the vehicle generated by the system without depending on the driving environment such as the variation of the vehicle or the cant of the driving road. can reduce the burden on
- FIG. 1 is a functional block diagram showing a vehicle steering system according to Embodiment 1;
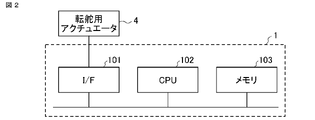
- FIG. 2 is a diagram showing a hardware configuration of a vehicle steering device in the vehicle steering system according to Embodiment 1;
- FIG. 4 is a flowchart for explaining the operation of a steering control amount limit value calculator in the vehicle steering system according to Embodiment 1;
- FIG. 2 is a functional block diagram showing a vehicle steering system that is a modification of Embodiment 1;
- FIG. FIG. 9 is a functional block diagram showing a vehicle steering system that is a modification of Embodiment 2;
- FIG. 1 is a functional block diagram showing the configuration of the vehicle steering system according to the first embodiment.
- the vehicle steering system includes a vehicle steering device 1 (hereinafter sometimes referred to as "steering device 1"), a lateral acceleration detection section 2, a roadway recognition section 3, and a steering actuator 4. It has In the following description, the vehicle equipped with the steering device 1 will be referred to as "own vehicle”.
- the steering system 1 includes a steering control amount calculator 10, a limit determination unit 11, a steering control amount limit value calculator 12, and a steering control amount limiter 13.
- the lateral acceleration detected by the lateral acceleration detector 2 is 11.
- the travel road information detected by the travel road recognition unit 3 is inputted to the steering control amount limit value calculation unit 12 and the steering control amount calculation unit 10, respectively, and the steering control amount is output.
- the steering system 1 may have a control function of a general electric power steering system.
- the lateral acceleration detection unit 2 is, for example, a lateral G sensor, detects the lateral acceleration of the own vehicle, and outputs it to the steering device 1.
- the lateral acceleration detector 2 may detect the yaw rate and vehicle speed of the own vehicle and output the values of the yaw rate and vehicle speed as the lateral acceleration, and any detection method may be used.
- the traveling road recognition unit 3 is, for example, a camera that captures an image in front of the vehicle, and recognizes lane boundary lines such as a roadway outer line, a roadway boundary line, and a roadway center line on the road ahead based on the captured image. . Then, from the position of the lane boundary line in the host vehicle coordinate system, the lane in which the host vehicle travels is recognized, and output to the steering device 1 as travel road information.
- the ego vehicle coordinate system is a coordinate system centered on a base point taken on the ego vehicle.
- the steering actuator 4 generates steering power (driving torque), which is a target torque corresponding to the steering control amount input from the steering device 1, and steers the steered wheels of the vehicle.
- the steering actuator 4 can be, for example, an electric motor for electric power steering or a hydraulic motor, and the type of motor is not particularly limited, and a DC motor and an AC motor can be used.
- the steering control amount calculation unit 10 sets a target driving line within the driving road for causing the vehicle to follow the driving road based on the driving road information in the own vehicle coordinate system, and sets the own vehicle on the target driving line. Outputs a steering control amount for following.
- the target travel line is set, for example, at a position a predetermined distance (for example, 1/2 of the travel road width) from the right lane boundary line in the own vehicle coordinate system, that is, at the center of the travel lane.
- the predetermined distance may be appropriately changed according to the driver's preference, the surrounding environment, and the like.
- the method of calculating the steering control amount of the steering control amount calculation unit 10 is well known in the art of assisting or automatically steering the steered wheels so as to follow the desired target travel line.
- the steering control amount may be the target torque for driving the steering actuator disclosed in JP-A-2003-200021, and the method is not limited.
- the limit determination unit 11 determines whether or not the steering control amount is limited by comparing the lateral acceleration of the host vehicle with an arbitrary preset lateral acceleration limit value, and outputs a limit determination flag to the steering control amount limit value calculation unit 12. .
- the limit determination flag is set to be limited, and when the lateral acceleration of the own vehicle is smaller than the lateral acceleration limit value, the limit determination flag is set to no limit. and set.
- the lateral acceleration limit value used to determine whether or not there is a limit is the same as the lateral acceleration limit value used to calculate the steering control amount limit value in the steering control amount limit value calculating section 12, which will be described later. May be set.
- the lateral acceleration limit values for determining whether there is a limit or not may be set to different values to provide hysteresis. Further, the determination may be made according to the magnitude relationship between the steering control amount limit value and the steering control amount in the steering control amount limit value calculation section 12 instead of making the determination based only on the lateral acceleration of the own vehicle.
- the restriction determination unit may determine the restriction determination flag as follows.
- the steering control amount limit value calculation unit 12 Based on the input lateral acceleration, steering control amount, and restriction determination flag, the steering control amount limit value calculation unit 12 performs steering such that the lateral acceleration generated in the host vehicle is equal to or less than an arbitrary lateral acceleration limit value set in advance. A control amount limit value is calculated and output to the steering control amount limiter 13 .
- the steering control amount limiter 13 limits the steering control amount to be equal to or less than the steering control amount limit value based on the input steering control amount and the steering control amount limit value, and outputs the result to the steering actuator 4 .
- each block of the steering system 1 shown in FIG. Processing Unit), DSP (Digital Signal Processor), etc. are used to configure the hardware configuration.
- the function of each block of the steering device 1 is realized by a combination of software or the like (software, firmware, or software and firmware).
- Software or the like is written as a program and stored in the memory 103 (storage device).
- An interface (I/F) 101 performs input/output control of signals with an external device such as the traveling path recognition unit 3 .
- FIG. 2 only shows a configuration in which the steering actuator 4 is connected via the I/F 101 .
- the CPU 102 implements the function of each block of the steering device 1 by executing various processes according to the programs stored in the memory 103 .
- These I/F 101, CPU 102, and memory 103 are connected to each other via a bus.
- FIG. 3 is a flowchart for explaining the operation of the steering control amount limit value calculator 12.
- the steering control amount limit value calculation unit 12 calculates the lateral acceleration output by the lateral acceleration detection unit 2, the steering control amount output by the steering control amount calculation unit 10, and the limit determination output by the limit determination unit 11. read the flags.
- step S102 a conditional branch determination is made based on the restriction determination flag. If the restriction determination flag indicates that there is a restriction, proceed to step S103. Otherwise, proceed to step S104.
- step S103 conditional branch determination is further performed based on the control determination flag. If it reaches step S105, otherwise the process proceeds to step S106.
- steps S104 to S106 a steering control amount limit value corresponding to each limit determination flag is calculated.
- the limit determination flag indicates that there is no limit, that is, the lateral acceleration of the host vehicle is smaller than the lateral acceleration limit value, and it is not necessary to limit the steering control amount.
- the steering control amount limiter 13 clears the steering control amount to a value that does not limit the steering control amount, for example, a value larger than the steering control amount that the vehicle steering system can take. Any value may be used as long as the steering control amount is not limited by the steering control amount limiter 13 .
- step S105 when the limit determination flag changes from no limit to limit, i.e., when the lateral acceleration of the own vehicle reaches the lateral acceleration limit value from a value smaller than an arbitrary lateral acceleration limit value, the lateral acceleration of the own vehicle
- the steering control amount limit value is set to the steering control amount so as not to increase .
- the steering control amount limit value is set to a steering control amount such that the lateral acceleration of the host vehicle is equivalent to the lateral acceleration limit value.
- step S106 the limit determination flag is in the state of having a limit, and the lateral acceleration of the own vehicle is in a state in which it is desired to continue the limit. retains the value By holding the steering control amount at the time when the lateral acceleration of the vehicle reaches the lateral acceleration limit value in steps S105 and S106, it is possible to prevent the lateral acceleration of the vehicle from increasing further. Become.
- the steering control amount limit value that limits the lateral acceleration of the vehicle to the lateral acceleration limit value is calculated, and the steering control amount is limited based on the steering control amount limit value. It is possible to uniformly limit the lateral angular velocity of the vehicle generated by the system without depending on the driving environment such as, so that the driver's anxiety is suppressed regardless of the driving environment such as the variation of the vehicle or the cant of the driving road. , the burden on the driver caused by discomfort can be reduced.
- the steering control amount of the vehicle steering system is limited, it is easy to make the steering control amount behave continuously before and after the limitation, and the lateral acceleration does not become discontinuous, which makes the driver feel uneasy. , contributes to reducing the burden on the driver caused by discomfort.
- Embodiment 2 the steering control amount limit value at the time when the lateral acceleration of the own vehicle reaches the lateral acceleration limit value is held in the steering control amount limit value calculation unit 12, so that the own vehicle The lateral acceleration was limited to be below an arbitrary lateral acceleration limit value.
- the vehicle steering system 1a is provided with a steering control amount limit value calculator 12a that calculates the steering control amount limit value according to the deviation between the lateral acceleration limit value and the lateral acceleration of the host vehicle. The vehicle steering system used will be described.
- FIG. 4 is a functional block diagram showing the configuration of the vehicle steering system according to the second embodiment, where the same reference numerals as in the first embodiment are the same or correspond to them.
- the steering control amount limit value calculator 12a in the vehicle steering system 1a includes a deviation calculator 120, an integrator 121, and a gain multiplier 122.
- the limit determination flag calculated by the steering control amount calculation unit 11 and the steering control amount calculated by the steering control amount calculation unit 10 are input to the integrator 121, respectively, and the lateral acceleration generated in the host vehicle is arbitrarily set as a lateral acceleration limit value.
- a steering control amount limit value such as the following is calculated and output to the steering control amount limiter 13 .
- the deviation computing unit 15 Based on the lateral acceleration, the deviation computing unit 15 computes the deviation between an arbitrary lateral acceleration limit value and the absolute value of the lateral acceleration, and outputs it to the integrator 121 as a lateral acceleration deviation.
- the integrator 121 calculates and outputs a lateral acceleration integral value corresponding to the limit determination flag based on the limit determination flag, the steering control amount, and the lateral acceleration deviation.
- a gain multiplier 122 multiplies the lateral acceleration integral value by a preset arbitrary gain, and outputs it as a steering control amount limit value.
- the gain to be multiplied may be a value that can be changed according to the vehicle speed of the vehicle. In this case, for example, the gain may be obtained by referring to a map corresponding to the detected vehicle speed. good.
- the integrator 121 and gain multiplier 122 function as a deviation amplifier 123 that amplifies the output of the deviation calculator 120 .
- FIG. 5 shows a flowchart for explaining the operation of the steering control amount limit value calculator 12a.
- the steering control amount limit value calculation unit 12a calculates the lateral acceleration output by the lateral acceleration detection unit 2, the steering control amount output by the steering control amount calculation unit, and the limit determination flag output by the limit determination unit 11. load.
- step S202 the deviation computing unit 15 performs computation, and the deviation between the lateral acceleration limit value and the absolute value of the lateral acceleration is computed as the lateral acceleration deviation as shown in the following equation (1).
- dGy Gy_limit -
- Gy_limit Lateral acceleration limit value
- Gy Lateral acceleration
- step S203 the calculation in the integrator 121 is performed.
- step S203 conditional branch determination is performed based on the limit determination flag.
- step S205 the lateral acceleration integral value is calculated by lateral acceleration integral value calculation (A) according to the following equation (2).
- I_Gy I_Gy previous value + dGy ⁇ dT (2) however, I_Gy: Lateral acceleration integral value dT: Integration calculation cycle
- Gy_limit Lateral acceleration limit value
- Gy Lateral acceleration
- the lateral acceleration integral value is calculated by lateral acceleration integral value calculation (B) according to the following equation (3). That is, by setting the lateral acceleration integral value to a value such that the steering control amount limit value is equivalent to the steering control amount, the steering control amount limiter 13 limits the steering control amount when the control determination flag indicates no limit. Also, when the control determination flag changes from unrestricted to restricted and starting to limit the steering control amount, the steering control amount limit value becomes discontinuous with respect to the steering control amount, and the steering control amount becomes discontinuous. can prevent it from happening.
- I_Gy Q_ctr / KI (3) however, I_Gy: Lateral acceleration integral value Q_ctr: Steering control amount KI: Gain
- step S206 gain multiplier 122 performs calculation according to the following equation (4), multiplies the lateral acceleration integral value by a preset arbitrary gain, and calculates the steering control amount limit value.
- Q_limit KI ⁇ I_Gy (4) however, Q_limit: Steering control amount limit value
- the steering control amount limit value is adjusted based on the deviation between the lateral acceleration limit value and the lateral acceleration. In comparison with the case of holding It is possible to improve the effect of reducing the burden on the driver caused by the driver's anxiety and discomfort without depending on the driving environment such as cant.
- the steering control amount limit value calculator 12a calculates the steering control amount limit value based only on the integral element of the lateral acceleration deviation, which is the deviation between the lateral acceleration limit value and the absolute value of the lateral acceleration.
- a proportional element and a differential element of the lateral acceleration deviation For example, when the proportional element is added, the ability to follow the lateral acceleration limit value can be improved.
- the reset processing of the lateral acceleration integral value of equation (3) in step S205 is replaced with the following equation (5), and the gain multiplication processing of equation (4) in step S206 is replaced with the following equation (6).
- a camera is used as the travel path recognition unit 3, and the camera recognizes the travel path ahead.
- the travel path may be recognized by means other than the camera.
- the same effects as those of the vehicle steering system shown in the present embodiment can be obtained.
- the vehicle may be configured to recognize the road ahead of the vehicle, or may be configured to recognize the road ahead of the vehicle obtained by radar, camera, etc. It may be configured to recognize the traveling road ahead based on the trajectory of the vehicle, and any means may be used.
- the steering control amount is, for example, the target torque (driving torque) for driving the steering actuator 4.
- the target steering angle is used to steer the vehicle so that the vehicle follows the target travel line. may be
- a functional block diagram showing the configuration of the vehicle steering system according to the first embodiment in this case is, for example, as shown in FIG.
- the steering control amount and the steering control amount limit value are also the target steering angle and the target steering angle limit value, respectively.
- the steering angle detection unit 5 and the steering angle control unit 14 are included. Then, based on the steering control amount input from the steering control amount limiting section 13, that is, the target steering angle and the steering angle input from the steering angle detecting section 5, a target steering angle of the own vehicle follows the target steering angle.
- a torque (driving torque) is calculated and output to the steering actuator 4 .
- the calculation of the target torque (driving torque) in the steering angle control section 14 may be performed by a known control method based on the proportional element, the integral element, etc. of the deviation between the target steering angle and the steering angle, and any calculation means may be used.
- the steering control amount limit value calculator 12 holds the steering angle, which is the steering control amount at the time when the lateral acceleration of the host vehicle reaches the lateral acceleration limit value. It is possible to prevent the lateral acceleration of the own vehicle from increasing further, that is, limit the lateral acceleration of the own vehicle to the lateral acceleration limit value.
- a functional block diagram showing the configuration of the vehicle steering system according to the second embodiment in this case is, for example, as shown in FIG. 14.
- the steering control amount limit value calculator 12a calculates the steering angle, which is the steering control amount, based on the deviation between the lateral acceleration limit value and the lateral acceleration.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
Description
以下、本願に開示される車両用操舵システムを実施の形態に従って図面を用いて説明する。
図1は、本実施の形態1の車両用操舵システムの構成を示す機能ブロック図である。図1に示すように車両用操舵システムは、車両用操舵装置1(以下「操舵装置1」と呼称する場合あり)と、横加速度検出部2、走行路認識部3、および転舵用アクチュエータ4を備えている。なお、以下の説明では、操舵装置1を搭載した車両を「自車両」と呼称する。
操舵制御量演算部10は自車両座標系における走行路情報に基づき、車両を走行路に追従して走行させるための目標となる目標走行ラインを走行路内に設定し、自車両を目標走行ラインに追従させるための操舵制御量を出力する。
また、自車両の横加速度のみに基づいて判定するのではなく、操舵制御量制限値演算部12における操舵制御量制限値と操舵制御量の大小関係に応じて判定するようにしてもよい。この場合、例えば制限判定部は制限判定フラグを以下のように判定すればよい。
(a)自車両の横加速度が横加速度制限値以上、かつ操舵制御量制限値が操舵制御量より大きい場合は、制限判定フラグは制限有を出力する。
(b)操舵制御量制限値が操舵制御量より小さい場合は、制限判定フラグは制限無を出力する。
(c)上記以外の場合は、制限判定フラグは前回の出力値を保持する。
以上のような判定をすることによって、自車両の横加速度が横加速度制限値以下となった場合においても、操舵制御量制限値が減少し、操舵制御量の値に一致するまでは制限有を出力しつづけるため、制限有から制限無に切り替わった際の操舵制御量制限値と操舵制御量の差異に相当する操舵制御量の変動を抑制することができ、運転者の不安感、不快感に起因する運転者に対する負担の軽減に寄与する。
CPU102はメモリ103に格納されたプログラムに従って各種処理を実行することで、操舵装置1の各ブロックの機能を実現する。これらのI/F101、CPU102、メモリ103は互いにバス接続されている。
まず、ステップS101において、操舵制御量制限値演算部12は、横加速度検出部2が出力する横加速度、操舵制御量演算部10が出力する操舵制御量、及び制限判定部11が出力する制限判定フラグを読み込む。
実施の形態1では、操舵制御量制限値演算部12において操舵制御量制限値を自車両の横加速度が横加速度制限値に到達した時点の操舵制御量を保持したものとすることにより、自車両の横加速度を任意の横加速度制限値以下となるよう制限した。
これに対し、本実施の形態2では横加速度制限値と自車両の横加速度の偏差に応じて操舵制御量制限値を演算する操舵制御量制限値演算部12aを備えた車両用操舵装置1aを用いた車両用操舵システムについて説明する。
偏差演算器15は横加速度に基づいて、任意の横加速度制限値と横加速度の絶対値の偏差を演算し、横加速度偏差として積分器121に出力する。
まず、ステップS201において、操舵制御量制限値演算部12aは、横加速度検出部2が出力する横加速度、操舵制御量演算部が出力する操舵制御量、及び制限判定部11が出力する制限判定フラグを読み込む。
dGy = Gy_limit - |Gy| ・・・・・(1)
但し、
dGy:横加速度偏差
Gy_limit:横加速度制限値
Gy:横加速度
まず、ステップS203において、制限判定フラグに基づく条件分岐判定を行い、制限判定フラグが制限有の場合、すなわち自車両の横加速度が横加速度制限値以上の場合はステップS204に、それ以外の場合はステップS205に進む。
ステップS204では下記の式(2)による横加速度積分値演算(A)にて横加速度積分値を演算する。
I_Gy = I_Gy前回値 + dGy × dT ・・・・・(2)
但し、
I_Gy:横加速度積分値
dT:積分演算周期
Gy_limit:横加速度制限値
Gy:横加速度
I_Gy = Q_ctr / KI ・・・・・(3)
但し、
I_Gy:横加速度積分値
Q_ctr:操舵制御量
KI:利得
Q_limit = KI ×I_Gy ・・・・・(4)
但し、
Q_limit: 操舵制御量制限値
I_Gy = Q_ctr / KI - KP × dGy ・・・・・(5)
但し、
KP:比例要素利得
Q_limit = KI ×I_Gy + KP ×dGy ・・・・・(6)
また、操舵制御量は転舵用アクチュエータ4を駆動するための、例えば目標トルク(駆動トルク)としたが、車両が目標走行ラインに追従して走行するような車両を操舵するための目標舵角としてもよい。
従って、例示されていない無数の変形例が、本願明細書に開示される技術の範囲内において想定される。例えば、少なくとも1つの構成要素を変形する場合、追加する場合または省略する場合、さらには、少なくとも1つの構成要素を抽出し、他の実施の形態の構成要素と組み合わせる場合が含まれるものとする。
Claims (8)
- 車両が目標走行ラインに追従して走行するように操舵操作を補助する車両用操舵システムであって、前記車両を前記目標走行ラインに近づけるための操舵制御量を演算する操舵制御量演算部と、車両の横加速度を検出する横加速度検出部と、前記横加速度に基づいて横加速度を横加速度制限値に制限するような操舵制御量制限値を演算する操舵制御量制限値演算部と、少なくとも前記横加速度に基づいて操舵制御量制限の有効、無効を判定する制限判定部と、前記操舵制御量制限値に基づいて前記制限判定部が制限有効と判定する場合に操舵制御量を制限する操舵制御量制限部を備えたことを特徴とする車両用操舵システム。
- 前記制限判定部は少なくとも前記横加速度、前記操舵制御量制限値に基づいて操舵制御量制限の有効、無効を判定することを特徴とする請求項1に記載の車両用操舵システム。
- 前記操舵制御量制限値演算部は前記横加速度が前記横加速度制限値に到達した時点の操舵制御量を操舵制御量制限値とすることを特徴とする請求項1に記載の車両用操舵システム。
- 前記操舵制御量制限値演算部は前記横加速度制限値と前記横加速度との偏差を演算する偏差演算器と、前記偏差演算器の出力を増幅する偏差増幅器を具備し、前記偏差増幅器の出力に基づいて前記操舵制御量制限値を演算することを特徴とする請求項1から請求項3のいずれか1項に記載の車両用操舵システム。
- 前記偏差増幅器は、少なくとも前記偏差演算器の出力を積分する積分器を含むことを特徴とする請求項4に記載の車両用操舵システム。
- 前記偏差増幅器は前記制限判定部が制限無効と判定した場合に前記積分器の積分要素を操舵制御量制限値が操舵制御量と一致する値に設定することを特徴とする請求項5に記載の車両用操舵システム。
- 車両の転舵輪を転舵する転舵用アクチュエータを備え、前記操舵制御量は前記転舵用アクチュエータの駆動トルクであって、 前記操舵制御量制限値演算部が演算する操舵制御量制限値は駆動トルク制限値であり、前記操舵制御量制限部は前記転舵用アクチュエータの前記駆動トルクを前記駆動トルク制限値に制限することを特徴とする請求項1から請求項6のいずれか1項に記載の車両用操舵システム。
- 車両の転舵輪の舵角を検出する舵角検出部と、車両の転舵輪を転舵する転舵用アクチュエータと、前記操舵制御量は前記車両の目標舵角であって、前記舵角が前記目標舵角に追従するように転舵用アクチュエータを駆動する舵角制御部を備え、前記操舵制御量制限値演算部が演算する操舵制御量制限値は目標舵角制限値であり、前記操舵制御量制限部は前記目標舵角を目標舵角制限値に制限することを特徴とする請求項1から請求項6のいずれか1項に記載の車両用操舵システム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202180098243.1A CN117320948A (zh) | 2021-05-21 | 2021-05-21 | 车辆用转向系统 |
| JP2023522158A JP7668872B2 (ja) | 2021-05-21 | 2021-05-21 | 車両用操舵システム |
| PCT/JP2021/019360 WO2022244233A1 (ja) | 2021-05-21 | 2021-05-21 | 車両用操舵システム |
| EP21940847.3A EP4342770A4 (en) | 2021-05-21 | 2021-05-21 | VEHICLE STEERING SYSTEM |
| US18/283,976 US20240166258A1 (en) | 2021-05-21 | 2021-05-21 | Vehicle steering system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/019360 WO2022244233A1 (ja) | 2021-05-21 | 2021-05-21 | 車両用操舵システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022244233A1 true WO2022244233A1 (ja) | 2022-11-24 |
Family
ID=84140343
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/019360 WO2022244233A1 (ja) | 2021-05-21 | 2021-05-21 | 車両用操舵システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20240166258A1 (ja) |
| EP (1) | EP4342770A4 (ja) |
| JP (1) | JP7668872B2 (ja) |
| CN (1) | CN117320948A (ja) |
| WO (1) | WO2022244233A1 (ja) |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005067484A (ja) | 2003-08-26 | 2005-03-17 | Fuji Heavy Ind Ltd | 車両の誘導制御装置 |
| JP2007030851A (ja) * | 2005-07-29 | 2007-02-08 | Nissan Motor Co Ltd | 車線逸脱防止装置 |
| JP2014073742A (ja) * | 2012-10-04 | 2014-04-24 | Nissan Motor Co Ltd | 操舵制御装置 |
| JP2015013545A (ja) | 2013-07-04 | 2015-01-22 | 富士重工業株式会社 | 車両の運転支援制御装置 |
| JP2016147590A (ja) * | 2015-02-12 | 2016-08-18 | 株式会社ジェイテクト | 運転支援制御装置 |
| JP6012824B1 (ja) | 2015-08-10 | 2016-10-25 | 三菱電機株式会社 | 車両用操舵装置および車両操舵制御方法 |
| JP2018012473A (ja) * | 2016-07-22 | 2018-01-25 | 株式会社ジェイテクト | 操舵支援装置 |
| JP2018114806A (ja) * | 2017-01-17 | 2018-07-26 | トヨタ自動車株式会社 | 車線内走行支援装置 |
| EP3611078A1 (en) * | 2018-08-17 | 2020-02-19 | Zenuity AB | Method and arrangement for ensuring road tracking up to a predefined lateral acceleration limit in a road vehicle |
| JP2020040524A (ja) * | 2018-09-11 | 2020-03-19 | トヨタ自動車株式会社 | 車両用操舵支援装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6690506B2 (ja) * | 2016-11-17 | 2020-04-28 | トヨタ自動車株式会社 | 車両の車線内走行支援装置 |
| KR101987713B1 (ko) * | 2017-09-29 | 2019-06-11 | 주식회사 만도 | 횡가속도를 이용한 차량 조향 제어 장치 및 방법 |
| US20200189591A1 (en) * | 2018-12-18 | 2020-06-18 | Qualcomm Incorporated | Steering Command Limiting For Safe Autonomous Automobile Operation |
-
2021
- 2021-05-21 JP JP2023522158A patent/JP7668872B2/ja active Active
- 2021-05-21 US US18/283,976 patent/US20240166258A1/en active Pending
- 2021-05-21 EP EP21940847.3A patent/EP4342770A4/en active Pending
- 2021-05-21 WO PCT/JP2021/019360 patent/WO2022244233A1/ja active Application Filing
- 2021-05-21 CN CN202180098243.1A patent/CN117320948A/zh active Pending
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005067484A (ja) | 2003-08-26 | 2005-03-17 | Fuji Heavy Ind Ltd | 車両の誘導制御装置 |
| JP2007030851A (ja) * | 2005-07-29 | 2007-02-08 | Nissan Motor Co Ltd | 車線逸脱防止装置 |
| JP2014073742A (ja) * | 2012-10-04 | 2014-04-24 | Nissan Motor Co Ltd | 操舵制御装置 |
| JP2015013545A (ja) | 2013-07-04 | 2015-01-22 | 富士重工業株式会社 | 車両の運転支援制御装置 |
| JP2016147590A (ja) * | 2015-02-12 | 2016-08-18 | 株式会社ジェイテクト | 運転支援制御装置 |
| JP6012824B1 (ja) | 2015-08-10 | 2016-10-25 | 三菱電機株式会社 | 車両用操舵装置および車両操舵制御方法 |
| JP2018012473A (ja) * | 2016-07-22 | 2018-01-25 | 株式会社ジェイテクト | 操舵支援装置 |
| JP2018114806A (ja) * | 2017-01-17 | 2018-07-26 | トヨタ自動車株式会社 | 車線内走行支援装置 |
| EP3611078A1 (en) * | 2018-08-17 | 2020-02-19 | Zenuity AB | Method and arrangement for ensuring road tracking up to a predefined lateral acceleration limit in a road vehicle |
| JP2020040524A (ja) * | 2018-09-11 | 2020-03-19 | トヨタ自動車株式会社 | 車両用操舵支援装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4342770A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN117320948A (zh) | 2023-12-29 |
| US20240166258A1 (en) | 2024-05-23 |
| EP4342770A1 (en) | 2024-03-27 |
| EP4342770A4 (en) | 2024-07-31 |
| JP7668872B2 (ja) | 2025-04-25 |
| JPWO2022244233A1 (ja) | 2022-11-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108297936B (zh) | 车辆的驾驶辅助装置 | |
| US11718341B2 (en) | Vehicle driver assistance system | |
| US6886656B2 (en) | Electric power steering apparatus | |
| JP4684698B2 (ja) | 車両の操舵制御装置 | |
| CN105980238B (zh) | 车辆转向控制装置 | |
| US20050004731A1 (en) | Drive-assist system | |
| US10532769B2 (en) | Vehicle steering system and lane keeping system | |
| US10377411B2 (en) | Steering control apparatus | |
| CN107776656B (zh) | 车辆用控制装置 | |
| US9731756B2 (en) | Drive assist control apparatus | |
| EP3808621B1 (en) | Actuator control device used in steering of vehicle | |
| EP3009332B1 (en) | Electric power steering device | |
| JP2018047827A (ja) | 操舵制御装置 | |
| CN113260553A (zh) | 转向控制装置和转向控制方法 | |
| JP6274367B2 (ja) | 電動パワーステアリング装置 | |
| WO2019130997A1 (ja) | 車両用制御装置 | |
| WO2022244233A1 (ja) | 車両用操舵システム | |
| US8086372B2 (en) | Steering support device | |
| JP6098545B2 (ja) | 車両制御装置 | |
| WO2020021817A1 (ja) | 車両の操舵制御装置 | |
| KR101194807B1 (ko) | 차량의 감속도를 이용한 비대칭 노면에서의 협조제어제어량 결정 방법 | |
| JP2002019631A (ja) | 操舵装置および操舵反力設定方法 | |
| KR102020752B1 (ko) | 전동식 파워 스티어링 시스템의 토크 보상 장치 및 방법 | |
| JP5298802B2 (ja) | 操舵支援装置 | |
| JP7177931B2 (ja) | 操舵制御装置、操舵制御方法、及び操舵制御システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21940847 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18283976 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023522158 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202180098243.1 Country of ref document: CN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2021940847 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2021940847 Country of ref document: EP Effective date: 20231221 |