WO2022064952A1 - 静電アクチュエータ - Google Patents
静電アクチュエータ Download PDFInfo
- Publication number
- WO2022064952A1 WO2022064952A1 PCT/JP2021/031413 JP2021031413W WO2022064952A1 WO 2022064952 A1 WO2022064952 A1 WO 2022064952A1 JP 2021031413 W JP2021031413 W JP 2021031413W WO 2022064952 A1 WO2022064952 A1 WO 2022064952A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- stator
- counter electrode
- mover
- electrostatic actuator
- electrode
- Prior art date
Links
- 239000003990 capacitor Substances 0.000 claims abstract description 89
- 230000005684 electric field Effects 0.000 claims abstract description 13
- 239000010410 layer Substances 0.000 description 29
- 230000004048 modification Effects 0.000 description 22
- 238000012986 modification Methods 0.000 description 22
- 239000000463 material Substances 0.000 description 11
- 239000011241 protective layer Substances 0.000 description 8
- 239000002184 metal Substances 0.000 description 6
- 239000011347 resin Substances 0.000 description 6
- 229920005989 resin Polymers 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 230000002093 peripheral effect Effects 0.000 description 4
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 3
- 229910052799 carbon Inorganic materials 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 229920001971 elastomer Polymers 0.000 description 2
- 239000000806 elastomer Substances 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000011810 insulating material Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
Images









Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N1/00—Electrostatic generators or motors using a solid moving electrostatic charge carrier
- H02N1/002—Electrostatic motors
- H02N1/004—Electrostatic motors in which a body is moved along a path due to interaction with an electric field travelling along the path
Definitions
- the present invention relates to an electrostatic actuator.
- Patent Document 1 discloses an electrostatic motor as an example of an actuator.
- the electrostatic motor shown in the figure includes a stator and a rotor.
- the stator and rotor each have a plurality of counter electrodes.
- the stator and the rotor are installed separately, and each has a plurality of electrodes.
- One electrode of the stator and one electrode of the rotor form a pair of electrodes, and the electrodes are separated from each other to form a capacitor structure. In this structure, it is difficult to make a pair of electrodes of the same electrode, and it is difficult to utilize repulsive force.
- the present invention was conceived under the above circumstances, and it is an object of the present invention to provide an electrostatic actuator with higher speed and higher output.
- the electrostatic actuator provided by the present invention is an electrostatic actuator including a stator and a mover, which is driven by generating an attractive force and a repulsive force due to an electric field between the stator and the mover.
- One of the stator and the mover comprises a plurality of first capacitor structures each having a first counter electrode and a first non-opposed electrode, and the stator and the other of the mover have a plurality of second. It is provided with a counter electrode and is driven by an attractive force and a repulsive force generated between the first counter electrode and the second counter electrode.
- the other of the stator and the mover comprises a plurality of second capacitor structures each having the second counter electrode and the second non-opposed electrode.
- a rotating shaft for outputting a driving force is provided, and the mover is circular when viewed along the axial direction of the rotating shaft, and is fixed to the rotating shaft.
- the stator has a cylindrical shape with the rotation axis as the central axis, and is provided at a position surrounding the mover.
- the plurality of first capacitor structures and the plurality of second counter electrodes are the first.
- the circular arrangement is centered on the rotation axis so that the 1 facing electrode and the 2nd facing electrode face each other.
- the stator has a shape that extends long in the first direction
- the mover has a smaller dimension in the first direction than the stator and with respect to the stator.
- the plurality of first capacitor structures and the plurality of second counter electrodes are arranged so as to face the second direction perpendicular to the first direction, and the first counter electrode and the second counter electrode are the same. Are arranged along the first direction so that they face each other.
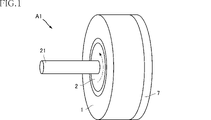
- the electrostatic actuator A1 of the present embodiment includes a stator 1, a mover 2, and a power receiving unit 7.
- the electrostatic actuator A1 is a motor type actuator that is an example of an actuator, and is an actuator that generates a rotational force.
- the stator 1 is a schematic perspective view showing the electrostatic actuator A1.
- FIG. 2 is a cross-sectional view of a cross section perpendicular to the axial direction of the rotating shaft 21, which will be described later. In FIG.
- FIG. 4 is a system configuration diagram of an actuator system using the electrostatic actuator A1.
- the stator 1 is a portion fixed to a peripheral portion where, for example, the electrostatic actuator A1 is installed.
- the stator 1 includes a support 3 and a plurality of capacitor structures 5.
- the support 3 is a member that forms most of the appearance of the stator 1 and supports a plurality of capacitor structures 5.
- the material constituting the support 3 is not limited in any way, and for example, a metal, a resin, or the like is appropriately used.
- the support 3 has a cylindrical shape.
- each capacitor structure 5 has a counter electrode 51, a non-counter electrode 52, and a dielectric layer 53.
- the counter electrode 51 is an electrode arranged inside in the radial direction and faces the mover 2.
- the non-opposed electrode 52 is arranged on the outer side in the radial direction, and is arranged on the side opposite to the mover 2 with the facing electrode 51 interposed therebetween.
- the dielectric layer 53 is sandwiched between the counter electrode 51 and the non-opposite electrode 52, and is a layer made of a dielectric.
- the material of the counter electrode 51 and the non-counter electrode 52 is not limited in any way, and a metal layer or a layer containing carbon is appropriately adopted.
- the material of the dielectric layer 53 is not limited in any way, and is made of a resin, an elastomer, or the like.
- the capacitor structure 5 is not limited as long as it can be in a charged state in which the counter electrode 51 and the non-opposite electrode 52 are intended in the operation of the electrostatic actuator A1 described later.
- FIG. 3 shows an enlarged detailed structure of the stator 1 and the mover 2, and the reference numerals corresponding to the stator 1 and the mover 2 are also shown. Further, in each figure, the stator 1 and the mover 2 have different radial directions in the figure. In the description of the stator 1, the upper side in the figure of FIGS. 3A, 3B and 3C is the inner side in the radial direction, and the left-right direction in the figure is the circumferential direction.
- the insulating layer 31 is provided on the inner peripheral surface of the support 3.
- the insulating layer 31 is for insulating the support 3 and the capacitor structure 5.
- the insulating layer 31 may not be provided.
- the material of the insulating layer 31 is not limited in any way, and is made of, for example, resin.
- the capacitor structure 5 is laminated on the insulating layer 31 in the order of the non-opposed electrode 52, the dielectric layer 53, and the counter electrode 51 from the outside in the radial direction. In the illustrated example, the capacitor structure 5 is covered by a protective layer 32.
- the protective layer 32 is a layer for insulating and protecting the capacitor structure 5 in addition to being charged between the capacitor structure 5 and the capacitor structure 6.
- the material of the protective layer 32 is not limited in any way, and is made of, for example, resin or the like. Further, the protective layer 32 is preferably made of a material having a dielectric constant equal to or higher than that of the dielectric layers 53 and 63, and is made of a material having an insulating property equal to or higher than that of the insulating layers 31 and 41. preferable.
- the recess 3a is provided inside the support 3 in the radial direction.
- the recess 3a is recessed from the inner peripheral surface of the support 3.
- a capacitor structure 5 is housed inside the recess 3a via an insulating layer 31.
- the stacking order of the capacitor structure 5 is the same as in FIG.
- a protective layer 32 is provided so as to cover the inner peripheral surface of the support 3 and the counter electrode 51.
- the support 3 has an electric field shielding portion 35.
- the electric field shielding portion 35 is made of a material capable of shielding an electric field such as metal.
- the electric field shielding portion 35 has a bottom portion 351 and a plurality of wall portions 352.
- the bottom portion 351 is provided at the back of the capacitor structure 5 (lower part in the figure), and extends in the direction in which the plurality of capacitor structures 5 are arranged.
- the plurality of wall portions 352 are provided between the adjacent capacitor structures 5, and the lower end in the figure is connected to the bottom portion 351.
- the capacitor structure 5 is arranged between the two wall portions 352.
- the support 4 has an electric field shielding portion 45 having the same configuration as the electric field shielding portion 35.
- the electric field shielding portion 45 has a bottom portion 451 and a plurality of wall portions 452 having the same configuration as the bottom portion 351 and the plurality of wall portions 352. According to such a configuration, it is possible to suppress leakage of electric field noise that may occur from the capacitor structure 5 and the capacitor structure 6 to the surroundings.
- the electric field shielding unit 35 and the electric field shielding unit 45 may be connected to the ground, or may not be connected to the ground or the power supply.
- the mover 2 is a part that rotates with respect to the stator 1.
- the mover 2 of the present embodiment includes a rotating shaft 21, a support 4, and a plurality of capacitor structures 6.
- the mover 2 is rotatable inward in the radial direction of the stator 1.
- the stator 1 and the mover 2 may be configured to be separated from each other with a gap, for example, or an insulating fluid such as oil may be placed between them. It may be an intervening configuration.
- the support 4 is a member that forms most of the appearance of the mover 2, and supports a plurality of capacitor structures 6.
- the material constituting the support 4 is not limited in any way, and for example, a metal, a resin, or the like is appropriately used.
- the support 3 has a cylindrical shape.
- the rotating shaft 21 is attached to the center of the support 4, and is a shaft that outputs the rotational force of the electrostatic actuator A1.
- the rotating shaft 21 is, for example, a round bar made of metal.
- each capacitor structure 6 has a counter electrode 61, a non-counter electrode 62, and a dielectric layer 63.
- the counter electrode 61 is an electrode arranged on the outer side in the radial direction and faces the counter electrode 51 of the stator 1.
- the non-opposed electrode 62 is arranged on the outer side in the radial direction, and is arranged on the side opposite to the stator 1 with the facing electrode 61 interposed therebetween.
- the dielectric layer 63 is sandwiched between the counter electrode 61 and the non-opposite electrode 62, and is a layer made of a dielectric.
- the material of the counter electrode 61 and the non-counter electrode 62 is not limited in any way, and a metal layer or a layer containing carbon is appropriately adopted.
- the material of the dielectric layer 63 is not limited in any way, and is made of a resin, an elastomer, or the like.
- the capacitor structure 6 is not limited as long as it can be in a charged state in which the counter electrode 61 and the non-opposite electrode 62 are in the intended state in the operation of the electrostatic actuator A1 described later. It is preferable that the thickness of the counter electrode 61 and the non-counter electrode 62 and the thickness of the dielectric layer 63 be thin as long as the normal withstand voltage can be maintained.
- the upper side in the figure of FIGS. 3 (a), (b) and (c) is the radial outside, and the left and right direction in the figure is the circumferential direction.
- the specific example of the mover 2 shown in FIGS. (A), (b) and (c) is the same as the specific example of the stator 1 described above.
- the insulating layer 41 is a layer corresponding to the insulating layer 31, and the protective layer 42 is a layer corresponding to the protective layer 32, and has the same configuration as the protective layer 32.
- the recess 4a is a recess similar to the recess 3a and accommodates the capacitor structure 6.
- the stator 1 has a plurality of capacitor structures 5, and the mover 2 has a plurality of capacitor structures 6. Therefore, one of the capacitor structure 5 and the capacitor structure 6 corresponds to the first capacitor structure of the present invention, and the other corresponds to the second capacitor structure.
- the power receiving unit 7 is for applying a voltage from the outside to the plurality of capacitor structures 6 of the mover 2.
- the power receiving unit 7 has a plurality of sliding terminals 71.
- the plurality of sliding terminals 71 are for maintaining individual continuity while sliding with each other, for example, with the plurality of sliding terminals 22 provided on the mover 2 in a state where the mover 2 is rotated with respect to the stator 1. belongs to.
- the plurality of power receiving units 77 and the plurality of sliding terminals 22 various conventionally known configurations can be appropriately adopted, and an example thereof includes a carbon brush.
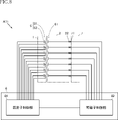
- the control unit 8 is used in the actuator system using the electrostatic actuator A1.
- the control unit 8 has, for example, a stator control unit 81 and a mover control unit 82. Further, a rotary encoder (rotary encoder) that detects the rotation angle of the mover 2 for polarity switching control (switchability control) of the plurality of capacitor structures 5 and the plurality of capacitor structures 6 by the stator control unit 81 and the mover control unit 82.
- a detection device such as (not shown) may be appropriately provided.
- the stator control unit 81 and the mover control unit 82 may be configured as separate control modules from each other, or may be configured as separate control modules from each other, or may be configured in one control unit 8 by a circuit portion having a function to be exhibited by each other. May be configured. Regardless of the configuration, it is preferable that the stator control unit 81 and the mover control unit 82 are grounded to a common ground line so that the potential standards of each other are matched.
- the stator control unit 81 is individually connected to each of the counter electrode 51 and the non-opposed electrode 52 of the plurality of capacitor structures 5.
- the stator control unit 81 can appropriately change and set the charging states of the counter electrode 51 and the non-opposite electrode 52 of each capacitor structure 5, for example, a power supply unit, a transformer unit, a switching unit, a control unit (CPU, microcomputer, etc.). ), A memory, etc. are appropriately provided.
- the mover control unit 82 is individually connected to each of the counter electrode 61 and the non-opposite electrode 62 of the plurality of capacitor structures 6 via the power receiving unit 7 (plural sliding terminals 71) and the plurality of sliding terminals 22. There is.
- the mover control unit 82 can appropriately change and set the charging states of the counter electrode 61 and the non-opposite electrode 62 of each capacitor structure 6, for example, a power supply unit, a transformer unit, a switching unit, a control unit (CPU, microcomputer, etc.). ), A memory, etc. are appropriately provided.
- stator control unit 81 and the mover control unit 82 in addition to the configuration in which the individual polarities of the plurality of capacitor structures 5 and the plurality of capacitor structures 6 can be freely set, a plurality of capacitor structures can be freely set. The individual polarities of only one of 5 and the plurality of capacitor structures 6 may be freely set.
- the above-mentioned stator control unit 81 sets the polarities of the plurality of capacitor structures 5 of the stator 1 to be opposite to each other. That is, a certain counter electrode 51 is a positive electrode, and the counter electrode 51 adjacent to the positive electrode is set to a negative electrode.
- the polarities of the plurality of capacitor structures 6 of the mover 2 are set to be opposite to each other by the mover control unit 82. That is, a certain counter electrode 61 is a positive electrode, and the counter electrode 61 adjacent to the positive electrode is set to a negative electrode.
- the counter electrode 61 facing the counter electrode 51 set to the + pole in the radial direction is set to the ⁇ pole
- the counter electrode 61 facing the counter electrode 51 set to the ⁇ pole in the radial direction is set to the + pole. Is set to.
- the movable element 2 is slightly moved counterclockwise in the figure with respect to the stator 1. Then, the repulsive force and the attractive force of the plurality of facing electrodes 51 and the plurality of facing electrodes 61 described above generate a driving force for rotating the mover 2 counterclockwise. As a result, the mover 2 rotates counterclockwise to the state shown in FIG. When this rotation further progresses, the counter electrode 51 and the counter electrode 61, which are adjacent to each other in the circumferential direction in FIG. 5, are closest to each other and face each other.
- the mover 2 can be rotated and the rotational force can be output from the rotating shaft 21.
- the polarity switching control by the stator control unit 81 and the mover control unit 82 may be stopped.
- the plurality of capacitor structures 5 have a structure in which the counter electrode 51 and the non-opposite electrode 52 are arranged so as to separate the dielectric layer 53. Therefore, if the counter electrode 51 and the non-opposite electrode 52 have opposite polarities to each other, the charged states of each other are maintained. Therefore, in the rotation control shown in FIGS. 5 and 6, any counter electrode 51 has an arbitrary polarity. Therefore, it is not necessary to continuously apply the voltage from the stator control unit 81. Further, the charging process in which the counter electrode 51 and the non-opposed electrode 52 forming the capacitor structure 5 have opposite polarities to each other can be performed more smoothly than charging a single counter electrode 51 to either polarity.
- the counter electrode 51 when the counter electrode 61 having the same electrode approaches the counter electrode 51, and if the counter electrode 51 is a simple electrode having no capacitor structure, the counter electrode 51 becomes a counter electrode due to the charging action from the counter electrode 61. Charging that becomes a different electrode of 61 acts.
- the counter electrode 51 is paired with the non-opposite electrode 52 with the dielectric layer 53 interposed therebetween, forming the capacitor structure 5. Therefore, it is possible to effectively suppress the charging action of the counter electrode 61 facing the counter electrode 51. Therefore, according to the electrostatic actuator A1, it is possible to provide an actuator having a higher speed and a higher output.
- the mover 2 has a plurality of capacitor structures 6, and both the stator 1 and the mover 2 are provided with a capacitor structure.
- Embodiment 1st modification> 7 and 8 show a first modification of the electrostatic actuator A1.
- the stator 1 has a plurality of capacitor structures 5
- the mover 2 has a plurality of counter electrodes 61.
- the mover 2 has a plurality of counter electrodes 61 arranged along the circumferential direction, it does not have an electrode having a capacitor structure (non-counter electrode 62 in the above-mentioned example). Therefore, in this variation example, the capacitor structure 5 corresponds to the first capacitor structure of the present invention, the counter electrode 51 corresponds to the first counter electrode of the present invention, and the non-opposite electrode 52 corresponds to the first non-opposite electrode of the present invention. It corresponds to an electrode, and the counter electrode 61 corresponds to the second counter electrode of the present invention.
- stator 1 is provided with a plurality of capacitor structures 5, so that the above-mentioned high speed and high output can be achieved. Further, as can be understood from the present modification, the present invention is not limited to the configuration including both the capacitor structure 5 and the capacitor structure 6.
- the stator 1 has a plurality of counter electrodes 51 arranged along the circumferential direction, it does not have an electrode having a capacitor structure (non-counter electrode 52 in the above-mentioned example). Therefore, in this variation example, the capacitor structure 6 corresponds to the first capacitor structure of the present invention, the counter electrode 61 corresponds to the first counter electrode of the present invention, and the non-opposite electrode 62 corresponds to the first non-opposite electrode of the present invention. It corresponds to the electrode, and the counter electrode 51 corresponds to the second counter electrode of the present invention.
- the stator 1 is provided with a plurality of capacitor structures 5, so that the above-mentioned high speed and high output can be achieved. Further, as can be understood from the present modification, in the present invention, either the stator 1 or the mover 2 may have a capacitor structure.
- FIG. 11 shows a third modification example of the electrostatic actuator A1.
- the electrostatic actuator A13 of this modification has, for example, the cross-sectional structure shown in FIG. 2, the polarities of the plurality of capacitor structures 6 are collectively set. That is, in the mover 2, the opposed electrodes 61 of the plurality of capacitor structures 6 are connected to each other, and the non-opposed electrodes 62 of the plurality of capacitor structures 6 are connected to each other. Therefore, two sliding terminals 22 and two sliding terminals 71 are provided.
- the electrostatic actuator A13 is detected by detecting the relative rotation angles of the stator 1 and the mover 2 and controlling the polarities of the plurality of capacitor structures 5 according to the rotation angles. Can be driven and controlled. Further, by setting the polarities of the plurality of capacitor structures 6 at once, it is possible to reduce the number of the sliding terminals 22 and the sliding terminals 71. Instead of this modification, the configuration may be such that the polarities of the plurality of capacitor structures 5 are set collectively.
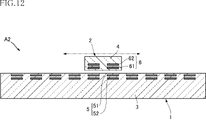
- FIG. 12 shows a second embodiment of the present invention.
- the electrostatic actuator A2 of the present embodiment is configured as a so-called linear actuator.
- the support 3 of the stator 1 has a shape that extends long in the left-right direction in the figure.
- the plurality of capacitor structures 5 are arranged in the left-right direction in the figure along the upper surface of the support 3 in the figure.
- the mover 2 is slidably supported by, for example, a rail member (not shown) and is movable in the left-right direction in the figure with respect to the stator 1.
- the support 4 of the mover 2 has a smaller lateral dimension than the support 3.
- the number of the capacitor structures 6 is smaller than the number of the plurality of capacitor structures 5. In the illustrated example, the number of the capacitor structures 6 is two, but may be one or three or more.
- the electrostatic actuator A2 the polarities of the plurality of capacitor structures 5 and the plurality of capacitor structures 6 are switched and controlled with respect to the stator 1 by, for example, the stator control unit 81 and the mover control unit 82 described above. It is possible to move the child 2 in the left-right direction in the figure. As a result, the electrostatic actuator A2 can output a driving force along the left-right direction in the figure from the mover 2.
- the electrostatic actuator A2 also has a configuration without the non-opposed electrode 62 exemplified in FIGS. 7 and 8, a configuration without the non-opposed electrode 52 exemplified with FIGS. 9 and 10, and further shown in FIG.
- the configuration may be appropriately adopted as a modification of the electrostatic actuator A2.
- the electrostatic actuator according to the present invention is not limited to the above-described embodiment.
- the specific configuration of each part of the electrostatic actuator according to the present invention can be freely redesigned.
Landscapes
- Micromachines (AREA)
Abstract
固定子1および可動子2を備え、固定子1と可動子2との間に電場による引力と斥力とを生じさせることにより駆動する静電アクチュエータA1であって、固定子1および可動子2の一方は、各々が対向電極51および非対向電極52を有する複数のコンデンサ構造5を具備し、固定子1および可動子2の他方は、複数の対向電極61を具備し、対向電極51と対向電極61との間に生じる引力と斥力とによって駆動する。このような構成によれば、より高速でより高出力の静電アクチュエータを提供することができる。
Description
本発明は、静電アクチュエータに関する。
駆動力を生じさせる駆動源として、電動モータや油圧シリンダ等の種々のアクチュエータが提案されている。特許文献1には、アクチュエータの一例である静電モータが開示されている。同図に示された静電モータは、固定子および回転子を備えている。固定子および回転子は、それぞれが複数の対向電極を有する。固定子の複数の対向電極の極性と回転子の複数の電極の極性とを個別に順次切り替えることにより、電極間に生じる引力および斥力を利用して回転子を回転させ、駆動力である回転力を生じさせる。
しかしながら、静電モータから得られる回転力の回転数を高めるには、複数の対向電極の極性の切り替えをより高速に行う必要がある。また、静電モータから得られる回転力の出力を高めるためには、複数の対向電極の帯電量をより大きくすることが必要である。従来の静電モータは、固定子と回転子を離して設置し、それぞれが複数の電極を有している。固定子の1つの電極と回転子の一つの電極とが一対の電極となり、それらの電極を離して設置することで、コンデンサ構造を構成している。この構造では、一対の電極を同極同士にすることは難しく、斥力を利用することは難しい。これを解決する手段として、抵抗などにより極性変化を遅延させることが考案されているが、極性変化が遅延するため高速な駆動の妨げになり、損失も増える。さらに、コンデンサを構成する一対の電極の位置関係は、常に変化するため、電極が全て重なる帯電量が一番大きい状態は、一瞬しか得られないことから、大きな力を得ることが難しい。
本発明は、上記した事情のもとで考え出されたものであって、より高速でより高出力の静電アクチュエータを提供することをその課題とする。
本発明によって提供される静電アクチュエータは、固定子および可動子を備え、前記固定子と前記可動子との間に電場による引力と斥力とを生じさせることにより駆動する静電アクチュエータであって、前記固定子および前記可動子の一方は、各々が第1対向電極および第1非対向電極を有する複数の第1コンデンサ構造を具備し、前記固定子および前記可動子の他方は、複数の第2対向電極を具備し、前記第1対向電極と前記第2対向電極との間に生じる引力と斥力とによって駆動する。
本発明の好ましい実施の形態においては、前記固定子および前記可動子の他方は、各々が前記第2対向電極および第2非対向電極を有する複数の第2コンデンサ構造を具備する。
本発明の好ましい実施の形態においては、駆動力を出力する回転軸を備え、前記可動子は、前記回転軸の軸方向に沿って視て円形とされ、且つ前記回転軸に固定されており、前記固定子は、前記回転軸を中心軸とした円筒形状とされ、且つ前記可動子を囲む位置に設けられており、前記複数の第1コンデンサ構造および前記複数の第2対向電極は、前記第1対向電極と前記第2対向電極とが互いに対向するように、前記回転軸を中心とした円形配置とされている。
本発明の好ましい実施の形態においては、前記固定子は、第1方向に長く延びる形状であり、前記可動子は、前記第1方向における寸法が前記固定子よりも小さく、且つ前記固定子に対して前記第1方向と直角である第2方向に対向して配置されており、前記複数の第1コンデンサ構造および前記複数の第2対向電極は、前記第1対向電極と前記第2対向電極とが互いに対向するように、前記第1方向に沿って配列されている。
本発明によれば、より高速でより高出力の静電アクチュエータが得られる。
本発明のその他の特徴および利点は、添付図面を参照して以下に行う詳細な説明によって、より明らかとなろう。
以下、本発明の好ましい実施の形態につき、図面を参照して具体的に説明する。
本開示における「第1」、「第2」、「第3」等の用語は、単にラベルとして用いたものであり、それらの対象物に順列を付することを意図していない。
<第1実施形態>
図1~図4は、本発明の第1実施形態に係る静電アクチュエータを示している。本実施形態の静電アクチュエータA1は、固定子1、可動子2および受電部7を備えている。静電アクチュエータA1は、アクチュエータの一例であるモータタイプのアクチュエータであり、回転力を生じるアクチュエータである。固定子1は、静電アクチュエータA1を示す概略斜視図である。図2は、後述の回転軸21の軸方向と直角である断面における断面図である。図3は、静電アクチュエータA1の(a)は、一例の要部拡大断面図であり、(b)は、他の例の要部拡大断面図であり、(c)は、さらに他の例の要部拡大断面図である。図4は、静電アクチュエータA1を用いたアクチュエータシステムのシステム構成図である。
図1~図4は、本発明の第1実施形態に係る静電アクチュエータを示している。本実施形態の静電アクチュエータA1は、固定子1、可動子2および受電部7を備えている。静電アクチュエータA1は、アクチュエータの一例であるモータタイプのアクチュエータであり、回転力を生じるアクチュエータである。固定子1は、静電アクチュエータA1を示す概略斜視図である。図2は、後述の回転軸21の軸方向と直角である断面における断面図である。図3は、静電アクチュエータA1の(a)は、一例の要部拡大断面図であり、(b)は、他の例の要部拡大断面図であり、(c)は、さらに他の例の要部拡大断面図である。図4は、静電アクチュエータA1を用いたアクチュエータシステムのシステム構成図である。
固定子1は、たとえば静電アクチュエータA1が設置される周囲部分に固定される部位である。本実施形態においては、固定子1は、支持体3および複数のコンデンサ構造5を備えている。
支持体3は、固定子1の殆どの外観をなす部材であり、複数のコンデンサ構造5を支持している。支持体3を構成する材料は何ら限定されず、たとえば金属や樹脂等が適宜用いられる。本実施形態においては、支持体3は、円筒形状である。
複数のコンデンサ構造5は、互いに並んで配置されており、本実施形態においては、支持体3の径方向内側において周方向に並んで配置されている。図2および図3に示すように、各コンデンサ構造5は、対向電極51、非対向電極52および誘電体層53を有する。対向電極51は、径方向内側に配置された電極であり、可動子2と対向している。非対向電極52は、径方向外側に配置されており、対向電極51を挟んで可動子2とは反対側に配置されている。誘電体層53は、対向電極51と非対向電極52とに挟まれており、誘電体からなる層である。
対向電極51および非対向電極52の材質は何ら限定されず、金属層やカーボンを含有する層が適宜採用される。誘電体層53の材質は何ら限定されず、樹脂やエラストマー等からなる。コンデンサ構造5は、後述の静電アクチュエータA1の動作において、対向電極51および非対向電極52が意図した状態の帯電状態となりうる構成であれば、なんら限定されない。
図3は、固定子1および可動子2の詳細構造を拡大して示しており、固定子1および可動子2に対応する符号をそれぞれ併記している。また、それぞれの図において、固定子1と可動子2とでは、図中における径方向の向きが異なっている。固定子1の説明においては、図3(a)(b)(c)の図中上側が径方向内側であり、図中左右方向が周方向である。
図3(a)に示す例においては、支持体3の内周面に絶縁層31が設けられている。絶縁層31は、支持体3とコンデンサ構造5とを絶縁するためのものである。なお、支持体3が絶縁性材料からなる場合、絶縁層31を設けない構成であってもよい。絶縁層31の材質は何ら限定されず、たとえば樹脂からなる。コンデンサ構造5は、径方向外側から非対向電極52、誘電体層53および対向電極51の順で、絶縁層31上に積層されている。図示された例においては、コンデンサ構造5は、保護層32によって覆われている。保護層32は、コンデンサ構造5とコンデンサ構造6との間で帯電状態となる他、コンデンサ構造5の絶縁および保護を図るための層である。保護層32の材質は何ら限定されず、たとえば樹脂等からなる。また、保護層32は、誘電体層53,63と同等かそれ以上の誘電率を有する材質からなるものが好ましく、絶縁層31,41と同等かそれ以上の絶縁性を有する材質からなるものが好ましい。
図3(b)に示す例においては、支持体3の径方向内側に凹部3aが設けられている。凹部3aは、支持体3の内周面から凹んでいる。凹部3aの内側には、絶縁層31を介してコンデンサ構造5が収容されている。コンデンサ構造5の積層順は、同図(a)と同様である。また、支持体3の内周面および対向電極51を覆うように、保護層32が設けられている。
図3(c)に示す例においては、支持体3が電界遮蔽部35を有する。電界遮蔽部35は、金属等の電界を遮蔽可能な材質からなる。図示された例においては、電界遮蔽部35は、底部351および複数の壁部352を有する。底部351は、コンデンサ構造5の奥方(図中下方)に設けられており、複数のコンデンサ構造5が並べられた方向に広がっている。複数の壁部352は、隣り合うコンデンサ構造5の間に設けられており、図中下端が底部351に繋がっている。言い換えると、コンデンサ構造5は、2つの壁部352の間に配置されている。また、支持体4は、電界遮蔽部35と同様の構成である電界遮蔽部45を有する。電界遮蔽部45は、底部351および複数の壁部352と同様の構成である底部451および複数の壁部452を有する。このような構成によれば、コンデンサ構造5およびコンデンサ構造6から生じうる電界ノイズが周囲に漏れることを抑制することができる。なお、電界遮蔽部35および電界遮蔽部45は、グランド接続されていてもよいし、グランド接続や電源接続がされていないものであってもよい。
可動子2は、固定子1に対して回転する部位である。本実施形態の可動子2は、回転軸21、支持体4および複数のコンデンサ構造6を備えている。可動子2は、固定子1の径方向内方において回転自在である。このような構成を実現する具体的構成として、固定子1と可動子2とは、たとえば隙間を隔てて互いに離間した構成であってもよいし、互いの間にオイル等の絶縁性の流体が介在した構成であってもよい。
支持体4は、可動子2の殆どの外観なす部材であり、複数のコンデンサ構造6を支持している。支持体4を構成する材料は何ら限定されず、たとえば金属や樹脂等が適宜用いられる。本実施形態においては、支持体3は、円筒形状である。回転軸21は、支持体4の中心に取付けられており、静電アクチュエータA1の回転力を出力する軸である。回転軸21は、たとえば金属からなる丸棒である。
複数のコンデンサ構造6は、互いに並んで配置されており、本実施形態においては、支持体4の径方向内側において周方向に並んで配置されている。図2および図3に示すように、各コンデンサ構造6は、対向電極61、非対向電極62および誘電体層63を有する。対向電極61は、径方向外側に配置された電極であり、固定子1の対向電極51と対向している。非対向電極62は、径方向外側に配置されており、対向電極61を挟んで固定子1とは反対側に配置されている。誘電体層63は、対向電極61と非対向電極62とに挟まれており、誘電体からなる層である。
対向電極61および非対向電極62の材質は何ら限定されず、金属層やカーボンを含有する層が適宜採用される。誘電体層63の材質は何ら限定されず、樹脂やエラストマー等からなる。コンデンサ構造6は、後述の静電アクチュエータA1の動作において、対向電極61および非対向電極62が意図した状態の帯電状態となりうる構成であれば、なんら限定されない。対向電極61および非対向電極62の厚さや誘電体層63の厚さは、通常の耐圧を維持しうる範囲で、薄くすることが好ましい。
可動子2の説明においては、図3(a)(b)(c)の図中上側が径方向外側であり、図中左右方向が周方向である。同図(a)(b)(c)に示す可動子2の具体例は、上述した固定子1の具体例と同様である。絶縁層41は、絶縁層31に対応する層であり、保護層42は、保護層32に対応する層であり、保護層32と同様の構成である。凹部4aは、凹部3aと同様の凹部であり、コンデンサ構造6を収容している。
なお、本実施形態においては、固定子1が複数のコンデンサ構造5を備えており、可動子2が複数のコンデンサ構造6を備えている。このため、コンデンサ構造5およびコンデンサ構造6の一方が本発明の第1コンデンサ構造に相当し、他方が第2コンデンサ構造に相当する。
図2および図4に示すように、受電部7は、可動子2の複数のコンデンサ構造6に外部から電圧を印加するためのものである。受電部7は、複数の摺動端子71を有する。複数の摺動端子71は、可動子2が固定子1に対して回転した状態において、たとえば可動子2に設けられた複数の摺動端子22と互いに摺動しつつ個別に導通を維持するためのものである。このような複数の受電部77および複数の摺動端子22としては、従来公知の種々の構成が適宜採用可能であり、その一例としてカーボンブラシが挙げられる。
図4に示すように、静電アクチュエータA1を用いたアクチュエータシステムにおいては、制御部8が用いられる。制御部8は、たとえば固定子制御部81および可動子制御部82を有する。また、固定子制御部81および可動子制御部82による複数のコンデンサ構造5および複数のコンデンサ構造6の極性切替制御(スイッチング性制御)のために、可動子2の回転角を検出するロータリーエンコーダ(図示略)等の検出デバイスを適宜備えていてもよい。なお、固定子制御部81および可動子制御部82は、互いに別体の制御モジュールとして構成されていてもよいし、1つの制御部8内において、互いの発揮すべき機能を担う回路部分によってそれぞれが構成されていてもよい。いずれの構成であっても、固定子制御部81と可動子制御部82とは、共通のグランドラインに接地される等により、互いの電位の基準が併せられていることが好ましい。
固定子制御部81は、複数のコンデンサ構造5の対向電極51および非対向電極52のそれぞれと個別に接続されている。固定子制御部81は、各コンデンサ構造5の対向電極51および非対向電極52の帯電状態を適宜変更設定可能なものであり、たとえば電源部、変圧部、スイッチング部、制御部(CPUやマイコン等)、メモリ等を適宜有して構成されている。
可動子制御部82は、受電部7(複数の摺動端子71)および複数の摺動端子22を介して複数のコンデンサ構造6の対向電極61および非対向電極62のそれぞれと個別に接続されている。可動子制御部82は、各コンデンサ構造6の対向電極61および非対向電極62の帯電状態を適宜変更設定可能なものであり、たとえば電源部、変圧部、スイッチング部、制御部(CPUやマイコン等)、メモリ等を適宜有して構成されている。
なお、固定子制御部81および可動子制御部82を備えることにより、複数のコンデンサ構造5および複数のコンデンサ構造6のそれぞれの個々の極性を自在に設定可能な構成の他に、複数のコンデンサ構造5および複数のコンデンサ構造6のいずれかのみの個々の極性を自在に設定可能な構成であってもよい。
次に、図5および図6を参照して、静電アクチュエータA1の動作例について説明する。
図5においては、上述した固定子制御部81により、固定子1の複数のコンデンサ構造5の隣り合うもの同士の極性が互いに逆に設定されている。すなわち、ある対向電極51が+極であり、これと隣り合う対向電極51が-極に設定されている。一方、可動子制御部82により、可動子2の複数のコンデンサ構造6の隣り合うもの同士の極性が互いに逆に設定されている。すなわち、ある対向電極61が+極であり、これと隣り合う対向電極61が-極に設定されている。そして、+極に設定された対向電極51と径方向において向かい合う対向電極61は、-極に設定されており、-極に設定された対向電極51と径方向において向かい合う対向電極61は、+極に設定されている。これにより、互いに向かい合う複数の5の対向電極51と複数のコンデンサ構造6の対向電極61との間には、斥力が生じている。また、周方向に隣り合う対向電極51と対向電極61との間には、引力が生じている。
たとえば、図5において、可動子2が固定子1に対して図中反時計回りに若干移動した状態を生じさせる。すると、上述した複数の対向電極51と複数の対向電極61との斥力および引力により、可動子2を反時計回りに回転させる駆動力が生じる。これにより、可動子2が反時計回りに回転し、図6に示す状態となる。この回転がさらに進行すると、図5において周方向に隣り合っていた対向電極51と対向電極61とが最接近して互いに向かい合う位置関係となる。たとえば、対向電極51が異なる極性の対向電極61(引力で引き合う対向電極61)を周方向に若干通過したときに、複数のコンデンサ構造5および複数のコンデンサ構造6のいずれか一方の極性を反転させる。これにより、互いに向かい合う対向電極51と対向電極61との間に斥力が生じ、図5と類似の状態となる。この後は、上述の制御を繰り返すことにより、可動子2を回転させ、回転軸21から回転力を出力することができる。一方、回転した可動子2を停止させる場合は、たとえば、固定子制御部81および可動子制御部82による極性切替制御を停止させればよい。
次に、静電アクチュエータA1の作用について説明する。
本実施形態によれば、複数のコンデンサ構造5は、対向電極51および非対向電極52が誘電体層53を隔てて配置された構造とされている。このため、対向電極51と非対向電極52とを互いに逆極性とすれば、互いの帯電状態を維持するしたがって、図5や図6に示した回転制御において、任意の対向電極51を任意の極性とするために、固定子制御部81から電圧を印加し続ける等の処理が不要である。また、コンデンサ構造5をなす対向電極51および非対向電極52を互いに逆極性とする帯電処理は、単一の対向電極51をいずれかの極性に帯電させるよりも、よりスムーズに行うことができる。また、対向電極51に対して同極の対向電極61が接近した場合、仮に対向電極51がコンデンサ構造をなさない単なる電極である場合、対向電極61からの帯電作用により、対向電極51が対向電極61の異極となるような帯電が作用してしまう。本実施形態においては、対向電極51は誘電体層53を挟んで非対向電極52と対となっており、コンデンサ構造5を構成している。このため、対向電極51に向かい合う対向電極61による帯電作用を効果的に抑制することが可能である。したがって、静電アクチュエータA1によれば、より高速でより高出力のアクチュエータを提供することができる。
また、本実施形態においては、可動子2が複数のコンデンサ構造6を有しており、固定子1および可動子2の双方にコンデンサ構造が設けられている。これにより、対向電極61を意図した極性に帯電させる際に、上述したようによりスムーズに帯電させることが可能である。また、対向電極61の帯電状態をより強い状態で維持することが可能である。したがって、アクチュエータの高速化および高出力化をさらに促進することができる。
図6~図9は、本発明の変形例および他の実施形態を示している。なお、これらの図において、上記実施形態と同一または類似の要素には、上記実施形態と同一の符号を付している。
<第1実施形態 第1変形例>
図7および図8は、静電アクチュエータA1の第1変形例を示している。本変形例の静電アクチュエータA11は、固定子1が複数のコンデンサ構造5を有しており、可動子2は、複数の対向電極61を有する。
図7および図8は、静電アクチュエータA1の第1変形例を示している。本変形例の静電アクチュエータA11は、固定子1が複数のコンデンサ構造5を有しており、可動子2は、複数の対向電極61を有する。
可動子2は、周方向に沿って配列された複数の対向電極61を有するものの、コンデンサ構造をなす電極(上述した例の非対向電極62)を有していない。このため、本変化例では、コンデンサ構造5が本発明の第1コンデンサ構造に相当し、対向電極51が本発明の第1対向電極に相当し、非対向電極52が本発明の第1非対向電極に相当し、対向電極61が本発明の第2対向電極に相当する。
本変形例によっても、固定子1が複数のコンデンサ構造5を備えることにより、上述した高速化および高出力化を図ることができる。また、本変形例から理解されるように、本発明は、コンデンサ構造5およびコンデンサ構造6の双方を備える構成に限定されない。
<第1実施形態 第2変形例>
図9および図10は、静電アクチュエータA1の第2変形例を示している。本変形例の静電アクチュエータA12は、可動子2が複数のコンデンサ構造6を有しており、固定子1は、複数の対向電極51を有する。
図9および図10は、静電アクチュエータA1の第2変形例を示している。本変形例の静電アクチュエータA12は、可動子2が複数のコンデンサ構造6を有しており、固定子1は、複数の対向電極51を有する。
固定子1は、周方向に沿って配列された複数の対向電極51を有するものの、コンデンサ構造をなす電極(上述した例の非対向電極52)を有していない。このため、本変化例では、コンデンサ構造6が本発明の第1コンデンサ構造に相当し、対向電極61が本発明の第1対向電極に相当し、非対向電極62が本発明の第1非対向電極に相当し、対向電極51が本発明の第2対向電極に相当する。
本変形例によっても、固定子1が複数のコンデンサ構造5を備えることにより、上述した高速化および高出力化を図ることができる。また、本変形例から理解されるように、本発明は、固定子1および可動子2のいずれがコンデンサ構造を備えていてもよい。
<第1実施形態 第3変形例>
図11は、静電アクチュエータA1の第3変形例を示している。本変形例の静電アクチュエータA13は、たとえば図2に示す断面構造を有するものの、複数のコンデンサ構造6の極性が、一括して設定される。すなわち、可動子2において、複数のコンデンサ構造6の対向電極61同士が互いに接続され、複数のコンデンサ構造6の非対向電極62同士が互いに接続されている。このため、摺動端子22および摺動端子71は、2つずつが設けられている。
図11は、静電アクチュエータA1の第3変形例を示している。本変形例の静電アクチュエータA13は、たとえば図2に示す断面構造を有するものの、複数のコンデンサ構造6の極性が、一括して設定される。すなわち、可動子2において、複数のコンデンサ構造6の対向電極61同士が互いに接続され、複数のコンデンサ構造6の非対向電極62同士が互いに接続されている。このため、摺動端子22および摺動端子71は、2つずつが設けられている。
このような変形例であっても、固定子1および可動子2の相対的な回転角度を検出し、この回転角度に応じて複数のコンデンサ構造5の極性を制御することにより、静電アクチュエータA13を駆動制御することができる。また、複数のコンデンサ構造6の極性を一括して設定することにより、摺動端子22および摺動端子71の個数を削減することが可能である。なお、本変形例に代えて、複数のコンデンサ構造5の極性を一括して設定する構成であってもよい。
<第2実施形態>
図12は、本発明の第2実施形態を示している。本実施形態の静電アクチュエータA2は、いわゆるリニアアクチュエータとして構成されている。
図12は、本発明の第2実施形態を示している。本実施形態の静電アクチュエータA2は、いわゆるリニアアクチュエータとして構成されている。
固定子1の支持体3は、図中左右方向に長く延びた形状である。複数のコンデンサ構造5は、支持体3の図中上面に沿って、図中左右方向に配列されている。
可動子2は、たとえば図示しないレール部材等に摺動可能に支持されて、固定子1に対して図中左右方向に移動自在である。可動子2の支持体4は、支持体3よりも左右方向寸法が小さい。また、コンデンサ構造6の個数は、複数のコンデンサ構造5の個数よりも小さい。図示された例においては、コンデンサ構造6の個数は、2つであるが、1つでもよいし、3つ以上でもよい。
静電アクチュエータA2においては、複数のコンデンサ構造5および複数のコンデンサ構造6の極性を、たとえば上述した固定子制御部81および可動子制御部82によって切替制御することにより、固定子1に対して可動子2を図中左右方向に移動させることが可能である。これにより、静電アクチュエータA2は、可動子2から図中左右方向に沿った駆動力を出力可能である。
なお、静電アクチュエータA2においても、図7および図8に例示した非対向電極62を備えない構成や、図9および図10に例示した非対向電極52を備えない構成、さらに図11に示した構成を、静電アクチュエータA2の変形例として適宜採用してもよい。
本実施形態によっても、静電アクチュエータA2の高速化および高出力化を図ることができる。また、本実施形態から理解されるように、本発明に係る静電アクチュエータの具体的な形態は、何ら限定されない。
本発明に係る静電アクチュエータは、上述した実施形態に限定されるものではない。本発明に係る静電アクチュエータの各部の具体的な構成は、種々に設計変更自在である。
Claims (4)
- 固定子および可動子を備え、
前記固定子と前記可動子との間に電場による引力と斥力とを生じさせることにより駆動する静電アクチュエータであって、
前記固定子および前記可動子の一方は、各々が第1対向電極および第1非対向電極を有する複数の第1コンデンサ構造を具備し、
前記固定子および前記可動子の他方は、複数の第2対向電極を具備し、
前記第1対向電極と前記第2対向電極との間に生じる引力と斥力とによって駆動する、静電アクチュエータ。 - 前記固定子および前記可動子の他方は、各々が前記第2対向電極および第2非対向電極を有する複数の第2コンデンサ構造を具備する、請求項1に記載の静電アクチュエータ。
- 駆動力を出力する回転軸を備え、
前記可動子は、前記回転軸の軸方向に沿って視て円形とされ、且つ前記回転軸に固定されており、
前記固定子は、前記回転軸を中心軸とした円筒形状とされ、且つ前記可動子を囲む位置に設けられており、
前記複数の第1コンデンサ構造および前記複数の第2対向電極は、前記第1対向電極と前記第2対向電極とが互いに対向するように、前記回転軸を中心とした円形配置とされている、請求項1または2に記載の静電アクチュエータ。 - 前記固定子は、第1方向に長く延びる形状であり、
前記可動子は、前記第1方向における寸法が前記固定子よりも小さく、且つ前記固定子に対して前記第1方向と直角である第2方向に対向して配置されており、
前記複数の第1コンデンサ構造および前記複数の第2対向電極は、前記第1対向電極と前記第2対向電極とが互いに対向するように、前記第1方向に沿って配列されている、請求項1または2に記載の静電アクチュエータ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022551220A JPWO2022064952A1 (ja) | 2020-09-28 | 2021-08-26 | |
| US18/245,160 US20230369992A1 (en) | 2020-09-28 | 2021-08-26 | Electrostatic actuator |
| CN202180062986.3A CN116134720A (zh) | 2020-09-28 | 2021-08-26 | 静电致动器 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020161620 | 2020-09-28 | ||
| JP2020-161620 | 2020-09-28 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022064952A1 true WO2022064952A1 (ja) | 2022-03-31 |
Family
ID=80845158
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/031413 WO2022064952A1 (ja) | 2020-09-28 | 2021-08-26 | 静電アクチュエータ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20230369992A1 (ja) |
| JP (1) | JPWO2022064952A1 (ja) |
| CN (1) | CN116134720A (ja) |
| WO (1) | WO2022064952A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02114871A (ja) * | 1988-10-21 | 1990-04-26 | Olympus Optical Co Ltd | 焦電アクチュエータ |
| JPH10155285A (ja) * | 1996-11-25 | 1998-06-09 | Asmo Co Ltd | 静電アクチュエータ |
| JP2003319666A (ja) * | 2002-04-24 | 2003-11-07 | Japan Science & Technology Corp | 静電浮上モータ |
-
2021
- 2021-08-26 CN CN202180062986.3A patent/CN116134720A/zh not_active Withdrawn
- 2021-08-26 US US18/245,160 patent/US20230369992A1/en active Pending
- 2021-08-26 JP JP2022551220A patent/JPWO2022064952A1/ja active Pending
- 2021-08-26 WO PCT/JP2021/031413 patent/WO2022064952A1/ja active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02114871A (ja) * | 1988-10-21 | 1990-04-26 | Olympus Optical Co Ltd | 焦電アクチュエータ |
| JPH10155285A (ja) * | 1996-11-25 | 1998-06-09 | Asmo Co Ltd | 静電アクチュエータ |
| JP2003319666A (ja) * | 2002-04-24 | 2003-11-07 | Japan Science & Technology Corp | 静電浮上モータ |
Also Published As
| Publication number | Publication date |
|---|---|
| CN116134720A (zh) | 2023-05-16 |
| JPWO2022064952A1 (ja) | 2022-03-31 |
| US20230369992A1 (en) | 2023-11-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4837449B2 (ja) | 静電モータ | |
| JP5141030B2 (ja) | 回転電機 | |
| US7750527B2 (en) | Motor/generator | |
| JP2010517498A (ja) | 直線形一次側部品セグメントを備えた回転駆動装置 | |
| JP2009539336A (ja) | 電気的同期機械 | |
| WO2022064952A1 (ja) | 静電アクチュエータ | |
| WO2017195263A1 (ja) | 永久磁石型モータ | |
| EP3378146B1 (en) | An electric machine | |
| KR100353457B1 (ko) | 압전형스텝모터 | |
| US4626722A (en) | Geared motor | |
| JP6020730B2 (ja) | 動力伝達装置 | |
| JP4464638B2 (ja) | 静電アクチュエータ | |
| JP2020097973A (ja) | ディスクブレーキ装置 | |
| WO2015186442A1 (ja) | 磁石励磁回転電機システム | |
| EP3189584B1 (en) | Synchronous rotation motor or generator provided with diverse rotors and/or stators | |
| JP5085875B2 (ja) | 電動機 | |
| KR100353451B1 (ko) | 압전형스텝모터 | |
| JP2013005491A (ja) | リニアアクチュエータ | |
| JP2011223745A (ja) | 静電モータ | |
| JP6318097B2 (ja) | 回転電機 | |
| WO2008001841A1 (fr) | Mécanisme de transmission de puissance et dispositif d'actionnement | |
| JP2024019974A (ja) | 電動モータ | |
| US20200076285A1 (en) | Multi-rotor electric machine | |
| JP2007143299A (ja) | 静電モータ | |
| JP2012100431A (ja) | 電動機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21872084 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022551220 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21872084 Country of ref document: EP Kind code of ref document: A1 |