WO2022013918A1 - 荷電粒子線装置、およびスキャン波形生成方法 - Google Patents
荷電粒子線装置、およびスキャン波形生成方法 Download PDFInfo
- Publication number
- WO2022013918A1 WO2022013918A1 PCT/JP2020/027252 JP2020027252W WO2022013918A1 WO 2022013918 A1 WO2022013918 A1 WO 2022013918A1 JP 2020027252 W JP2020027252 W JP 2020027252W WO 2022013918 A1 WO2022013918 A1 WO 2022013918A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- correction
- scan waveform
- distortion
- scan
- waveform
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images


















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/02—Details
- H01J37/04—Arrangements of electrodes and associated parts for generating or controlling the discharge, e.g. electron-optical arrangement or ion-optical arrangement
- H01J37/147—Arrangements for directing or deflecting the discharge along a desired path
- H01J37/1472—Deflecting along given lines
- H01J37/1474—Scanning means
- H01J37/1475—Scanning means magnetic
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/02—Details
- H01J37/04—Arrangements of electrodes and associated parts for generating or controlling the discharge, e.g. electron-optical arrangement or ion-optical arrangement
- H01J37/147—Arrangements for directing or deflecting the discharge along a desired path
- H01J37/1472—Deflecting along given lines
- H01J37/1474—Scanning means
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/02—Details
- H01J37/04—Arrangements of electrodes and associated parts for generating or controlling the discharge, e.g. electron-optical arrangement or ion-optical arrangement
- H01J37/153—Electron-optical or ion-optical arrangements for the correction of image defects, e.g. stigmators
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/26—Electron or ion microscopes; Electron or ion diffraction tubes
- H01J37/28—Electron or ion microscopes; Electron or ion diffraction tubes with scanning beams
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/153—Correcting image defects, e.g. stigmators
- H01J2237/1536—Image distortions due to scanning
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/26—Electron or ion microscopes
- H01J2237/28—Scanning microscopes
Definitions
- the present disclosure relates to a charged particle beam device and a scan waveform generation method.
- Patent Document 1 discloses a technique related to scan distortion correction.
- the geometric strain at the first magnification is measured as an absolute strain based on a standard sample having a periodic structure.
- the first magnification for which the geometric strain has been measured and the second for which the geometric strain has not been measured have not been measured.
- the microstructure sample is photographed at a magnification.
- An stretched image is generated in which the image at the first magnification is isotropically expanded and contracted up to the second magnification.
- the geometric distortion at the second magnification is the relative distortion based on the stretched image.
- the absolute strain at the second magnification is obtained from the absolute strain at the first magnification and the relative strain at the second magnification. After that, the second magnification is replaced with the first magnification and the relative strain measurement is repeated. Thereby, the geometric distortion at an arbitrary magnification is measured and corrected.
- Patent Document 1 measures the magnification image distortion from two images having different magnifications and corrects only the magnification distortion.
- a method of performing correction there is a method of storing the correction value in advance in a LUT (Look Up Table) and outputting the correction value according to the coordinate value of the scan.
- LUT Look Up Table
- the magnification distortion, the distortion of the current flowing through the deflection coil of the electron beam, the scanning speed, and the distortion due to the scanning direction (raster rotation) of the electron probe are corrected for each condition. It is necessary to store the value in the LUT or rewrite the LUT contents for each condition. If it is stored in advance, a huge memory capacity is required, and a huge memory write time is required to rewrite each condition.
- the scanning time is extended and the central portion of the waveform with relatively slight scan distortion is used for imaging. Therefore, the screen display time in sample observation increases, and the observation throughput decreases. In addition, there is a problem that the throughput of the image connecting function and the accuracy of the image connecting function are lowered.
- the present disclosure proposes a technique for appropriately correcting various types of distortion without reducing the observation throughput.
- the present disclosure is a charged particle beam apparatus for irradiating a sample with a charged particle beam to acquire an image, a deflection coil for scanning the charged particle beam on the sample, and a digital scan waveform.
- a D / A converter that converts
- the scan waveform generator proposes a charged particle beam apparatus that has a basic LUT that stores parameters for correcting digital scan waveforms and includes a correction circuit that corrects the distortion characteristics of the deflection coil.
- the present embodiment relates to a charged particle beam device for observing a sample in a wide range of fields such as semiconductor devices, electronics, advanced nanotechnology materials, biology, and pharmaceuticals, and particularly to scan control for scanning an electron beam to acquire an image.
- a charged particle beam device can be applied to, for example, a semiconductor inspection device and a length measuring device.
- a scan waveform (described later) that serves as a reference for correction using basic parameters stored in the basic LUT is used.
- the basic parameters are changed by the linear approximation waveform or the curve approximation waveform with respect to the change point of, the distortion amount corresponding to each condition is corrected by using the changed parameter, and the scan waveform which drives a deflection coil is output. ..
- FIG. 1 is a diagram showing a configuration example of a scanning electron microscope according to an embodiment.
- the scanning electron microscope 100 includes an electron source 101, a first condenser lens 102, a second condenser lens 103, a deflector 104, a housing 105, an objective lens 106, and a sample chamber. 107, a sample 108, an amplifier 109, a waveform acquisition unit 110, a D / A converter 111, a scan waveform generator 112, a computer with a display 113 (hereinafter, may be simply referred to as a “computer”), and the like.
- a computer with a display 113 hereinafter, may be simply referred to as a “computer”
- the electron source 101 is generally accelerated to 0.5 kV to 30 kV and emits an electron beam (primary electron beam).
- the multi-stage lens composed of the first condenser lens 102, the second condenser lens 103, and the like is controlled under conditions suitable for observation, and has an action of converging the primary electron beam. Further, the deflector 104 has an action of varying the scanning speed. Then, secondary electrons and backscattered electrons are emitted from the sample 108 with the irradiation of the primary electron beam.
- the scan waveform generator 112 outputs an analog waveform to the deflector 104 via the D / A converter 111.
- the deflector 104 is controlled by the input scan waveform to scan the irradiation position of the primary electron beam on the sample 108 according to a desired observation field range. Further, the scan waveform generation device 112 also supplies the same analog waveform as the output to the deflector 104 to the waveform acquisition unit 110.
- the waveform acquisition unit 110 takes the same waveform signal as that output to the deflector 104 as an input, and converts an analog signal into a digital signal by the A / D converter 114. Then, the waveform acquisition unit 110 stores the acquired digital waveform signal (waveform data) in the acquisition waveform storage memory, and outputs the stored waveform data to the scan waveform generation device 112. By comparing this waveform data with the reference waveform for distortion detection / correction (ideal waveform: scan waveform with the slowest scan speed), even before the sample 108 is actually irradiated with the primary electron beam. , It becomes possible to detect the presence or absence of scan distortion.
- the scan waveform generator 112 includes a scan generator 201 and a linear approximation correction unit 205, and includes magnification distortion, distortion of the current flowing through the deflection coil of the electron beam, scan speed, and electron probe. Distortion due to the scanning direction (raster rotation) can be corrected for all conditions.
- the image is displayed on the computer 113 with a display in synchronization with the scanning of the primary electron beam.
- the computer 113 with a display includes a display means for displaying the formed image, an information input means for inputting information necessary for operating the device to the GUI displayed on the display means, and the like.
- Each component of the electron optics system for example, the acceleration voltage of the primary electron beam, the probe current applied to the sample 108, and the like are adjusted automatically or by the user inputting a desired value on the computer 113 with a display.
- FIG. 2 is a diagram showing an example of the internal configuration of the scan waveform generation device 112 in the first mode (linear approximation described later).
- the scan waveform generation device 112 receives commands from the computer 113 (scan setting commands for instructing scan parameters and correction commands for acquiring distortion correction values) and outputs from the waveform acquisition unit 110 as inputs, and the scan generation unit 112.
- 201 a basic LUT correction unit 204-1 that corrects the X-direction scan signal 202, a basic LUT correction unit 204-2 that corrects the Y-direction scan signal 203, a linear approximation correction unit 205, and a time correction unit 206.
- the linear approximation correction unit 205 corrects the scan speed correction unit 207-1 for correcting the scan speed distortion in the X direction, the scan speed correction unit 207-2 for correcting the scan speed distortion in the Y direction, and the magnification distortion in the X direction.
- the scan speed correction units 207-1 and 207-2 respond to the conditions of each scan speed. Has a correction parameter to correct the distortion of the scan speed.
- the magnification correction units 208-1 and 208-2 respond to the conditions of each scan magnification. It has a correction parameter and corrects the distortion of the scan magnification.
- the rotation correction units 209-1 and 209-2 are respectively. It has a correction parameter according to the condition of the rotation angle in the scan direction, and corrects the distortion due to the scan rotation.
- the time correction units 206-1 and 206-2 correct (adjust) the delay time caused by the scan distortion correction processing. This makes it possible to prevent a time difference between scanning the sample 108 without correction and scanning the sample 108 with correction.
- FIG. 3 is a diagram showing a schematic internal configuration example of the basic LUT correction unit 204 and the linear approximation correction unit 205 in the first mode.
- the basic LUT correction unit 204 has a table for storing correction value data which is the reverse characteristic of distortion corresponding to a 16-bit input X coordinate value in advance, and outputs conversion data corresponding to the input X coordinate value. Correct the distortion. For example, when the data width of the X coordinate value is 16 bits, the memory capacity of the LUT is about 1 Mbit because the number of X coordinates is 65536. In this embodiment, only the basic LUT is prepared without preparing the LUT for distortion correction for each of the X scan and the Y scan for the scan speed, the observation magnification, and the rotation.
- the memory capacity of the basic LUT is, for example, about 1 Mbit when the coordinates are represented by 16 bit digital data, and about 2 Mbit when this is represented by two equations of the X coordinate and the Y coordinate. With this level of capacity, it can be built into an FPGA (Field-Programmable Gate Array), for example, and no external memory is required. Therefore, cost reduction can be realized.
- FPGA Field-Programmable Gate Array
- the total memory capacity is about 8.4 Mbit.
- the straight line approximation correction unit 205 does not correct all the X coordinate values, but approximates the curve with a straight line and approximates each (scan). Corrects distortion (speed, observation magnification, rotation).
- the linear approximation correction unit can be configured by, for example, a multiplier 301, an adder 302, a selector 303, a comparator 304, and a register.
- the register is necessary for setting the slope of the parameter used in the distortion correction, the offset, and the setting value of the change point. Since the parameters set in the register are provided for each change point, the number of parameters set in the register increases or decreases depending on the number of change points.
- the memory capacity can be reduced as compared with the method of correcting all by LUT (conventional example). That is, in the present embodiment, the LUT is provided only in the basic LUT correction unit 204, and the LUT is not provided in other parts (straight line approximation correction unit 205 or curve approximation correction unit 1001 described later). Therefore, the memory capacity can be reduced.
- FIG. 4 is a diagram showing a configuration example of a GUI (Graphical User Interface) according to the present embodiment.
- the GUI 401 displayed on the display of the computer 113 with a display includes, for example, an observation screen 402, a distortion correction mode switching unit 403, a correction value acquisition unit 404, a correction value setting unit 405, and an observation condition setting unit 406.
- the observation screen 402 is a display area for the user to visually confirm the observation sample.
- the observation condition setting unit 406 is an area for the user to set (set to an arbitrary value) a scan speed value, an observation magnification value, and a rotation value (angle value).
- the distortion correction mode switching unit 403 is an area for the user to set a desired distortion correction mode.
- the correction value acquisition unit 404 is an area used when acquiring a correction value.
- the correction value setting unit 405 is a region used when the correction value is set in the basic LUT correction units 204-1 and 204-2, the linear approximation correction unit 205, or the curve approximation correction unit 1001 (described later).
- the user sets the combination of the basic LUT correction and the linear approximation correction in the first mode, the combination of the basic LUT correction and the curve approximation correction (described later) in the second mode, and the rise of the scan waveform on the GUI 401. It is possible to arbitrarily select and switch between the third mode in which the portion and the falling portion are not used for imaging.
- FIG. 5 is a schematic view showing the state of the rising portion and the falling portion of the scan.
- the third mode in which the rising and falling parts of the scan are not used for imaging, when the screen size is 1280 x 960 in high-speed scanning, 200 ⁇ s is required per X scan.
- the first mode and the second mode it is 125 ⁇ s, which is reduced by about 70 ms per image.
- the third mode instead of performing the calculation by correction, only the central part of the scan waveform having a small distortion dependence and a relatively high linearity is used for imaging. Therefore, the rising and falling portions of the scan waveform are not used for imaging. Therefore, it is possible to selectively suppress the charge-up caused by the sample of the insulating material that occurs at the beginning of the scan.
- the third mode is used.
- the mode can be selectively switched and set.
- FIG. 6 is a flowchart for explaining the distortion correction process by linear approximation of the present embodiment.
- the distortion correction is performed independently in the X direction and the Y direction of the primary electron beam. Further, in the present embodiment, the processing is performed in the order of scan speed correction ⁇ magnification correction ⁇ rotation correction, but the order of these processing is arbitrary, and any correction processing may be executed first.
- Step 601 After starting the processing, the waveform acquisition unit 110 acquires the scan waveform and inputs it to the scan generation unit 201.
- Step 602 The scan generation unit 201 is acquired by the scan waveform acquired in step 601 and the reference waveform for calculating the amount of distortion (ideal waveform: for example, the slowest scan in the scanning electron microscope (charged particle beam device) 100). The waveform is compared with the scan waveform with the least distortion), and the difference between them is measured as the amount of distortion.
- ideal waveform for example, the slowest scan in the scanning electron microscope (charged particle beam device) 100.
- Step 603 The scan generation unit 201 calculates the inverse characteristic of the strain amount measured in step 602.
- Step 604 The scan generation unit 201 sets a correction value, which is an inverse characteristic calculated in step 603, for the LUTs of the basic LUT correction units 204-1 and 204-2.
- the scan generation unit 201 sets an arbitrary number of scan speed patterns, calculates a correction value (parameter) of the reverse characteristic from the strain amount for each setting, and is a straight line with respect to the scan speed correction units 207-1 and 207-2. Set the correction value for approximation correction.
- Step 606 Similar to the scan speed, the scan generation unit 201 sets an arbitrary number of patterns of magnification, calculates the correction value (parameter) of the inverse characteristic from the amount of distortion caused by the magnification, and causes the magnification correction units 208-1 and 208-2. Then, a correction value for linear approximation correction is set.
- Step 607 The scan generation unit 201 sets an arbitrary number of rotation (rotation angles) patterns, calculates correction values (parameters) for the amount of distortion of each pattern, and linearly approximates the rotation correction units 209-1 and 209-2. Set to the correction value for correction.
- the scan waveform output from the scan generation unit 201 is the basic LUT correction units 204-1 and 204-2, the scan speed correction units 207-1 and 207-2, the magnification correction units 208-1 and 208-2, and the rotation.
- the elements are corrected (distortion correction and delay time adjustment) by the correction units 209-1 and 209-2 and the time correction units 206-1 and 206-2, respectively, and output to the D / A converter 111.
- the D / A converter 111 converts the digital waveform into an analog waveform and outputs it to the deflector 104.
- Step 609 The deflector scans the primary electron beam with a highly linear scan waveform to display a distortion-free image.
- FIG. 7 is a diagram showing a specific example of correction processing of the X-direction scan waveform signal by linear approximation.
- the scan generation unit 201 acquires the amount of distortion, which is the difference between the reference waveform (ideal waveform of a straight line) and the distorted measurement waveform, and sets the reverse characteristic of the amount of distortion in the basic LUT correction unit 204-1. Then, the basic LUT correction unit 204-1 distorts the scan waveform signal in the opposite direction. As a result, the delay-dependent distortion amount of the responsiveness of the deflection coil 1401 is canceled by the distortion amount in the reverse direction due to the basic LUT, and is corrected to a scan waveform with high linearity.
- the number of change points of the linear approximation is 4 for each of the scan speed correction, the magnification correction, and the rotation correction. Therefore, for each of the change point a, the change point b, the change point c, the change point d, the slope 1 connecting each change point and the end point, the slope 2, the slope 3, the slope 4, and the slope 5. Offset 1, offset 2, offset 3, offset 4, and offset 5 corresponding to each inclination are stored in the acquisition waveform storage memory 115 in the waveform acquisition unit 110 as correction value parameters.
- FIG. 8 is a diagram showing an example of a calculation method and a calculation formula for the inclination value.
- the method for calculating the slope 2 is a value obtained by dividing the X coordinate value of the change point b and the value obtained by subtracting the offset 2 by the time value of the change point b.
- slope ⁇ 5 types horizontal axis value of the change point ⁇ 4 types; offset value ⁇ offset value
- the register setting accesses each correction unit from the computer, the number of accesses increases and the time required for correction increases as the number of parameters for register setting increases.
- the scan scan is delayed and the scan waveform is distorted.
- the amount of distortion at each scan speed is measured in advance, and the correction value, which is the opposite characteristic, is stored in the acquisition waveform storage memory 115 in the waveform acquisition unit 110. Then, the amount of distortion due to the influence of the scan speed is canceled by the linear approximation waveform drawn from the stored correction value parameters a and b, the slope 1 corresponding to each point and the end point, and the slope 2 and the slope 3. It becomes possible. By canceling the amount of strain, an ideal waveform with high linearity can be generated.
- the observation magnification condition is low, that is, when the scan scan is performed over a wide range, the range in which the beam is scanned to the end in the X direction and the beam is returned to the opposite end of the beam scan start is long, so the scan that scans the beam is performed.
- the waveform is distorted with a delay. In this case, the distortion of the waveform due to the magnification is measured, and the correction value which is the opposite characteristic is stored in the acquisition waveform storage memory 115 in the waveform acquisition unit 110.
- the distortion amount due to the influence of the magnification is canceled by the linear approximation waveform drawn from the change points a and b, which are the stored correction value parameters, and the slope 1, the slope 2, and the slope 3 corresponding to each point and the end point. Can be done. By canceling the amount of strain, an ideal waveform with high linearity can be generated.
- the scan waveform may be distorted.
- the amount of strain at each rotation angle is measured, and the correction value, which is the reverse characteristic of the measured amount of strain, is stored in the acquired waveform storage memory 115 in the waveform acquisition unit 110.
- a linear approximation waveform is drawn from the stored correction value parameters a and b, and the slope 1, the slope 2, and the slope 3 connecting each point and the end point. Then, by calculating the drawn linear approximation waveform and the distorted waveform, the distortion due to rotation can be canceled.
- the time correction unit 206 can adjust the time for correction by setting the register.
- FIG. 9 is a diagram showing a comparison of circuit scales between a method of correcting all by LUT (comparative example) and a method of correcting by basic LUT and linear approximation (this embodiment). According to this embodiment, it can be seen that the memory capacity can be reduced to about 25% of the comparative example. Further, it can be seen that the register setting time (the time for transmitting the parameter from the storage unit to the arithmetic unit inside the FPGA) is only 0.05% of the comparative example.
- the distortion amount of the deflection coil is corrected by the basic LUT correction unit, and the distortion depending on each observation condition is corrected in real time by the linear approximation correction.
- FIG. 10 is a diagram showing an example of the internal configuration of the scan waveform generation device 112 in the second mode.
- the scan waveform generation device 112 receives commands from the computer 113 (scan setting commands for instructing scan parameters and correction commands for acquiring distortion correction values) and outputs from the waveform acquisition unit 110 as inputs, and the scan generation unit 112.
- 201 a basic LUT correction unit 204-1 that corrects the X-direction scan signal 202, a basic LUT correction unit 204-2 that corrects the Y-direction scan signal 203, a curve approximation correction unit 1001, and a time correction unit 206.
- the curve approximation correction unit 1001 corrects the scan speed correction unit 1002-1 for correcting the scan speed distortion in the X direction, the scan speed correction unit 1002-2 for correcting the scan speed distortion in the Y direction, and the magnification distortion in the X direction.
- the basic LUT correction units 204-1 and 204-2 have and input a table for storing correction value data which is an inverse characteristic of distortion corresponding to a 16-bit input X coordinate value in advance.
- the conversion data corresponding to the X coordinate value is output to correct the distortion.
- the curve approximation correction unit 1001 uses a small-capacity LUT to approximate the vicinity of the conversion point (where the slope changes significantly) of the approximate straight line in the first mode with a smooth curve, respectively (scan speed, observation magnification, rotation). Correct the distortion of. In the straight line approximation correction, the slope near the change point becomes steep and the correction accuracy becomes coarse, but in the curve approximation correction, the correction accuracy is higher than the straight line approximation correction because the curve can be smoothly corrected by the small capacity LUT. In addition, by limiting the range of curve correction, the memory capacity and correction time can be reduced as compared with the above-mentioned comparative example.
- the small-capacity LUT is prepared for each of the scan speed correction unit, the magnification correction unit, and the rotation correction unit for the X scan and the Y scan.
- FIG. 11 is a flowchart for explaining the distortion correction process by curve approximation of the present embodiment (second mode).
- the slope near the change point changes greatly, so that the correction may be coarse.
- the correction by curve approximation by setting the correction value to a small capacity LUT (separate from the basic LUT), the vicinity of the change point becomes smooth. Therefore, it is possible to increase the accuracy of correction as compared with the first mode.
- Step 1101 The scan generation unit 201 acquires the scan waveform acquired by the waveform acquisition unit 110.
- Step 1102 The scan generation unit 201 compares the scan waveform acquired in step 1101 with the reference waveform for strain measurement (ideal waveform: for example, the waveform acquired by the slowest scan), and uses the difference as the strain amount. measure.
- the reference waveform for strain measurement ideal waveform: for example, the waveform acquired by the slowest scan
- Step 1103 The scan generation unit 201 calculates the inverse characteristic of the strain amount measured in step 1102.
- Step 1104 The scan generation unit 201 sets correction values having opposite characteristics in the basic LUT correction units 204-1 and 204-2.
- the scan generation unit 201 sets an arbitrary number of scan speed patterns, and calculates an inverse characteristic correction value (parameter) from the amount of distortion obtained near each change point (start point and end point are specified) of each pattern. , The correction value is set to the small capacity LUT (not shown) of the scan speed correction units 1002-1 and 1002-2.
- Step 1106 the scan generation unit 201 sets an arbitrary number of magnification patterns, calculates the correction value (parameter) of the inverse characteristic from the strain amount near each change point of each pattern (the start point and the end point are specified), and calculates the correction value (parameter). Correction values are set in the small-capacity LUTs (not shown) of the magnification correction units 1003-1 and 1003-2.
- Step 1107 the scan generation unit 201 sets an arbitrary number of rotation (angle) patterns, and corrects the inverse characteristic from the distortion amount near each change point (start point and end point are specified) of each pattern (parameter). Is calculated, and a correction value is set in the small capacity LUT (not shown) of the rotation correction units 1004-1 and 1004-2.
- the scan waveform output from the scan generation unit 201 is the basic LUT correction units 204-1 and 204-2, the scan speed correction units 1002-1 and 1002-2, the magnification correction units 1003-1 and 1003-2, and the rotation. It is corrected by the correction units 1004-1 and 1004-2 and output to the D / A converter 111.
- the D / A converter 111 converts the corrected digital waveform into an analog waveform, and sends the converted scan waveform (analog waveform) to the deflector 104.
- Step 1109 The deflector 104 displays a distortion-free image by scanning the primary electron beam. The correction is performed independently for the X direction and the Y direction of the primary electron beam.
- FIG. 12 is a diagram showing a configuration example of an arithmetic circuit for curve approximation correction (second mode).
- the calculation circuit for curve approximation correction can be configured by, for example, an adder 1203, a comparator 1204, a selector 1205, a data type conversion unit 1206, and a range selection unit 1207.
- the scan generation unit 201 determines from the calculation result of the small capacity LUT the start point 1201 and the end point 1202 (start point and end point of the point to be approximated by the curve (near the change point)): to which range the small capacity LUT is applied to approximate the curve.
- the information shown) is calculated and the register is set.
- the comparator 1204 compares the scan coordinates with the calculated start point 1201 and end point 1202.
- the range selection unit 1207 selects a range, and the selector 1205 corrects or controls the scan waveform. For example, the correction is performed by adding the scan coordinates 16 bits and the small capacity LUT data 9 bits, and the data type is converted into integer data and then output.
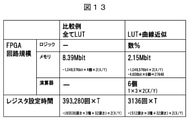
- FIG. 13 is a diagram showing the results of comparing the circuit scales of the method of correcting all by LUT (comparative example) and the method of basic LUT correction + curve approximation correction (second mode).
- the second mode is a calculation based on a LUT (small capacity LUT), so only one arithmetic unit is used for each correction unit. Therefore, the number of arithmetic units used is reduced as compared with the first mode. Further, it can be seen that the register setting time (the time for transmitting the parameter from the storage unit to the arithmetic unit inside the FPGA) is about 1% of the comparative example, and the distortion correction can be performed in real time.
- FIG. 14 is a diagram showing an example of the internal configuration of the waveform acquisition unit 110 according to the present embodiment.
- the waveform acquisition unit 110 includes an A / D converter 114, an acquisition waveform storage memory 115, a deflection coil 1401, a current sensor 1402, and a resistor 1403.
- the waveform acquisition unit 110 acquires the amount of distortion by measuring the current of the deflection coil 1401 with the current sensor 1402 and then comparing it with a reference waveform (ideal waveform: the waveform acquired by the slowest scan). Then, this strain amount is recorded in the acquired waveform storage memory 115, and is output as a scan waveform to the scan waveform generator 112.
- the current range can be adjusted by the resistor 1403, and a desired level of current waveform can be acquired.
- This makes it possible to acquire not only the distortion due to the delay in the response of the deflection coil 1401 but also the scan distortion due to each observation condition by using the apparatus. That is, it is possible to correct the distortion due to a slight difference in the device and the scan distortion due to the aged deterioration of the device as many times as necessary.
- FIG. 15 is a diagram showing an outline of an image connecting function according to the present embodiment.
- the image joining function is a function of capturing a plurality of images and joining them by software processing to generate one image.
- the image before joining is captured, the image without distortion is acquired by extending the scan time (the image of the rising portion and the falling portion is not used for image generation). ), As a result, the throughput of the image connection function was significantly reduced.
- the scan is magnified and the beam is irradiated, the sample damage is worsened.
- the scanning time is reduced and the throughput is improved accordingly. Further, since it is not necessary to irradiate the joint portion where the scan has been enlarged with a beam, it is possible to improve the accuracy of the image joint and reduce the damage to the sample.
- FIG. 16 is a flowchart for explaining the correction value calculation process by simulation evaluation.
- Step 1601 The computer 113 performs a simulation evaluation from the design value of the charged particle beam device, and calculates a correction value which is an inverse characteristic of the scan output waveform from the simulation result.
- Step 1602 The computer 113 calculates the discretized digital value of the inverse characteristic from the scan distortion analog waveform. The calculation of the discretized digital values of the inverse characteristics is performed for each of the X-direction scan and the Y-direction scan.
- Step 1603 The computer 113 sets the correction values calculated in step 1602 in the basic LUT correction units 204-1 and 204-2.
- the amount of distortion of the deflection coil 1401 can be evaluated at the design stage.
- FIG. 17 is a flowchart for explaining the correction value calculation process by the waveform acquisition unit 110.
- the correction value calculation process by the waveform acquisition unit 110 can be executed at a stage where only the FPGA circuit exists (a stage where the actual machine of the charged particle beam device does not yet exist).
- Step 1701 The waveform acquisition unit 110 measures the scan output waveform.
- Step 1702 The waveform acquisition unit 110 calculates a digital value of the inverse characteristic from the scan waveform measured in step 1701. When calculating the digital value of the inverse characteristic, the waveform acquisition unit 110 calculates each of the X-direction scan and the Y-direction scan. Further, the waveform acquisition unit 110 calculates correction values for each of the scan speed, the observation magnification, and the rotation.
- Step 1703 The waveform acquisition unit 110 sets values in the basic LUT correction units 204-1 and 204-2.
- Step 1704 The waveform acquisition unit 110 sets a correction value in the linear approximation correction unit 205 or the curve approximation correction unit 1001 for each of the X-direction scan and the Y-direction scan.
- the correction value calculation process by the waveform acquisition unit 110 is not a process of calculating the correction value using the actual machine of the charged particle beam device. Therefore, it is not possible to measure the amount of strain due to the difference between the devices. However, the strain caused by the deflection coil 1401 and each observation condition can be measured, and various strains can be corrected.
- FIG. 18 is a flowchart for explaining the correction value calculation process at the time of shipment of the device. That is, this correction value calculation process is related to the acquisition of the correction value using the actual machine.
- Step 1801 The scan generation unit 201 measures the scan output waveform from the device at the time of shipment.
- Step 1802 The scan generation unit 201 calculates a discretized digital value of the inverse characteristic from the analog value of the scan distortion waveform.
- Step 1803 The scan generation unit 201 sets the digital values calculated in step 1802 in the basic LUT correction units 204-1 and 204-2.
- Step 1804 The scan generation unit 201 calculates the inverse characteristics of the distortion due to the scan speed, the observation magnification, and the rotation for each of the X-direction scan and the Y-direction scan, and sets them in the linear approximation correction unit 205 or the curve approximation correction unit 1001.
- FIG. 19 is a flowchart for explaining the correction value calculation process at the time of user use.
- Step 1901 The scan generation unit 201 measures the scan output waveform from the post-shipment device (device in use: for example, a charged particle beam device that has been used for many years).
- Step 1902 The scan generation unit 201 calculates a digital value of the inverse characteristic from the scan waveform measured in step 1901. When calculating the digital value of the inverse characteristic, it is calculated for each X-direction scan and Y-direction scan. Further, the scan generation unit 201 calculates the scan speed, the observation magnification, and the correction value by rotation for each of the X-direction scan and the Y-direction scan.
- Step 1903 The scan generation unit 201 sets a correction value in the basic LUT correction unit 204.
- Step 1904 The scan generation unit 201 sets a correction value in the straight line approximation correction unit 205 or the curve approximation correction unit 1001.
- Step 1905 The scan generation unit 201 measures the scan waveform again in response to the user's instruction.
- Step 1906 The scan generation unit 201 acquires a correction value from the waveform measured in step 1905, and resets the correction value in the basic LUT correction units 204-1 and 204-2. Similarly, the scan generation unit 201 resets the correction value to the linear approximation correction unit 205 or the curve approximation correction unit 1001 for each scan speed, observation magnification, and rotation. That is, after shipment, the user can arbitrarily re-correct the scan distortion due to the aged deterioration of the device. Therefore, the maintenance of the device can be performed by the user himself / herself.
- the charged particle beam apparatus 100 may be provided with functions corresponding to the above-mentioned first mode, second mode, and third mode, and one of them may be selected so that the sample 08 can be scanned and observed. , The function corresponding to the first mode or the second mode and the third mode may be provided so that the sample 108 can be observed. Further, the charged particle beam apparatus 100 may be configured to have either the function of the first mode or the second mode.
- the distortion characteristic of the deflection coil is corrected by using the basic LUT that stores the parameter for correcting the scan waveform (digital scan waveform).
- the linear approximation correction unit 205 and the curve approximation correction unit 1001 change the correction parameters acquired from the basic LUT according to the conditions including at least one of the scan speed, the magnification, and the rotation.
- the correction parameters are (i) the first parameter set of the inverse characteristics of the distortion characteristics under predetermined conditions (parameters for correcting the distortion due to the delay in the response of the deflection coil) stored in the basic LUT.
- (ii) It is composed of a combination of a second parameter set (parameters generated by changing the correction parameters of the basic LUT according to each condition) according to each condition of scan speed, magnification, and rotation.
- the second parameter set is a parameter for distortion correction by linear approximation or a parameter for distortion correction by curve approximation that corrects distortion corresponding to a condition including at least one of scan speed, magnification, and rotation. ..
- the distortion characteristic is corrected by executing the second correction (correction according to each condition) by the second parameter set.
- magnification distortion, distortion of the current flowing through the deflection coil of the electron beam, scanning speed, and distortion due to the scanning direction (raster rotation) of the electron probe can be corrected for all conditions, linear approximation or curve.
- scan distortion correction can improve the throughput and connection accuracy of the image connection function. Further, since the scan waveform acquisition means can correct the scan distortion even after the device is shipped, the distortion due to aged deterioration can be re-corrected.
- the function of this embodiment can also be realized by a software program code.
- a storage medium in which the program code is recorded is provided to the system or the device, and the computer (or CPU or MPU) of the system or the device reads out the program code stored in the storage medium.
- the program code itself read from the storage medium realizes the function of the above-described embodiment, and the program code itself and the storage medium storing the program code itself constitute the present disclosure.
- Examples of the storage medium for supplying such a program code include a flexible disk, a CD-ROM, a DVD-ROM, a hard disk, an optical disk, a magneto-optical disk, a CD-R, a magnetic tape, a non-volatile memory card, and a ROM. Etc. are used.
- the OS operating system
- the processing enables the function of the above-described embodiment to be realized. You may. Further, after the program code read from the storage medium is written in the memory on the computer, the CPU of the computer or the like performs a part or all of the actual processing based on the instruction of the program code, and the processing is performed. May realize the function of the above-described embodiment.
- the program code is distributed as a storage means such as a hard disk or a memory of the system or an apparatus, or a storage medium such as a CD-RW or a CD-R.
- the computer (or CPU or MPU) of the system or device may read and execute the program code stored in the storage means or the storage medium at the time of use.
- control lines and information lines are shown as necessary for explanation, and the product does not necessarily show all the control lines and information lines. All configurations may be interconnected.
- Scan waveform generator 113 computer with display, 114 A / D converter, 115 acquisition waveform storage memory, 201 scan generator, 202 X-direction scan signal, 203 Y-direction scan signal, 204 basic LUT correction unit, 205 linear approximation correction unit , 206 time correction unit, 207 scan speed correction unit, 208 magnification correction unit, 209 rotation correction unit, 301 multiplier, 302 adder, 303 selector, 304 comparer, 401 GUI, 402 observation screen, 403 distortion correction mode switching unit , 404 correction value acquisition unit, 405 correction value setting unit, 406 observation condition setting unit, 1001 curve approximation correction unit, 1201 start point, 1202 end point, 1203 adder, 1204 comparer, 1205 selector, 1206 data type conversion unit, 1207 range Selector, 1401 deflection coil, 1402 current sensor, 1403 resistor
Landscapes
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Electron Sources, Ion Sources (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022535998A JP7392155B2 (ja) | 2020-07-13 | 2020-07-13 | 荷電粒子線装置、およびスキャン波形生成方法 |
| US18/012,478 US12476070B2 (en) | 2020-07-13 | 2020-07-13 | Charged particle beam device and scan waveform generation method |
| PCT/JP2020/027252 WO2022013918A1 (ja) | 2020-07-13 | 2020-07-13 | 荷電粒子線装置、およびスキャン波形生成方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/027252 WO2022013918A1 (ja) | 2020-07-13 | 2020-07-13 | 荷電粒子線装置、およびスキャン波形生成方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022013918A1 true WO2022013918A1 (ja) | 2022-01-20 |
Family
ID=79555267
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/027252 Ceased WO2022013918A1 (ja) | 2020-07-13 | 2020-07-13 | 荷電粒子線装置、およびスキャン波形生成方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12476070B2 (https=) |
| JP (1) | JP7392155B2 (https=) |
| WO (1) | WO2022013918A1 (https=) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01239742A (ja) * | 1988-03-17 | 1989-09-25 | Nichidenshi Tekunikusu:Kk | 走査電子顕微鏡の自動焦点制御装置 |
| JPH02236936A (ja) * | 1989-03-08 | 1990-09-19 | Mitsubishi Electric Corp | 荷電ビーム装置 |
| US20080315112A1 (en) * | 2007-06-25 | 2008-12-25 | Wiesner John C | Charged particle beam deflection method with separate stage tracking and stage positional error signals |
| JP2015133267A (ja) * | 2014-01-15 | 2015-07-23 | 株式会社日立ハイテクノロジーズ | 荷電粒子ビーム装置 |
| JP2018195545A (ja) * | 2017-05-22 | 2018-12-06 | 日本電子株式会社 | 荷電粒子線装置および走査像の歪み補正方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6703623B1 (en) * | 2000-09-27 | 2004-03-09 | Leepl Corporation | Electron beam proximity exposure apparatus |
| JP2003151484A (ja) * | 2001-11-15 | 2003-05-23 | Jeol Ltd | 走査型荷電粒子ビーム装置 |
| JP4801518B2 (ja) | 2006-07-07 | 2011-10-26 | 株式会社日立ハイテクノロジーズ | 荷電粒子線顕微方法および荷電粒子線装置 |
| US9793091B1 (en) * | 2016-06-28 | 2017-10-17 | Ngr Inc. | Image generation apparatus |
-
2020
- 2020-07-13 US US18/012,478 patent/US12476070B2/en active Active
- 2020-07-13 WO PCT/JP2020/027252 patent/WO2022013918A1/ja not_active Ceased
- 2020-07-13 JP JP2022535998A patent/JP7392155B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01239742A (ja) * | 1988-03-17 | 1989-09-25 | Nichidenshi Tekunikusu:Kk | 走査電子顕微鏡の自動焦点制御装置 |
| JPH02236936A (ja) * | 1989-03-08 | 1990-09-19 | Mitsubishi Electric Corp | 荷電ビーム装置 |
| US20080315112A1 (en) * | 2007-06-25 | 2008-12-25 | Wiesner John C | Charged particle beam deflection method with separate stage tracking and stage positional error signals |
| JP2015133267A (ja) * | 2014-01-15 | 2015-07-23 | 株式会社日立ハイテクノロジーズ | 荷電粒子ビーム装置 |
| JP2018195545A (ja) * | 2017-05-22 | 2018-12-06 | 日本電子株式会社 | 荷電粒子線装置および走査像の歪み補正方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230260739A1 (en) | 2023-08-17 |
| JPWO2022013918A1 (https=) | 2022-01-20 |
| JP7392155B2 (ja) | 2023-12-05 |
| US12476070B2 (en) | 2025-11-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8304722B2 (en) | Charged particle beam equipment and charged particle microscopy | |
| JP2010062106A (ja) | 走査型荷電粒子顕微鏡装置及び走査型荷電粒子顕微鏡装置で取得した画像の処理方法 | |
| JP5591617B2 (ja) | 荷電粒子線装置および該装置の制御方法 | |
| JP5798099B2 (ja) | 画質調整方法、プログラムおよび電子顕微鏡 | |
| JP7392155B2 (ja) | 荷電粒子線装置、およびスキャン波形生成方法 | |
| JP3524776B2 (ja) | 走査電子顕微鏡 | |
| JPH11296680A (ja) | コントラスト改善機能を有する画像処理装置及び荷電粒子線装置 | |
| JP2010272398A (ja) | 荷電粒子線応用装置 | |
| JP5248128B2 (ja) | 画像信号処理方法及び装置、並びに荷電粒子線装置 | |
| JP6162813B2 (ja) | 荷電粒子線装置及びその補正フィルタ設定方法 | |
| US12278084B2 (en) | Electron microscope and image generation method | |
| JP4431624B2 (ja) | 荷電粒子線調整方法、及び荷電粒子線装置 | |
| JP2000162286A (ja) | 電子ビームテスタ及び画像処理装置 | |
| JP2010015731A (ja) | 走査型電子顕微鏡、および走査型電子顕微鏡における画像の改良方法 | |
| JP2008300486A (ja) | 半導体装置の検査システム、検査方法、及び検査装置 | |
| US12463008B2 (en) | Charged particle beam scanning module, charged particle beam device, and computer | |
| WO2015156095A1 (ja) | 画像処理システム及び画像処理方法並びに画像処理システムを用いたsem装置 | |
| JP7290747B2 (ja) | 走査電子顕微鏡 | |
| JP5287135B2 (ja) | 画像形成方法及び荷電粒子線装置 | |
| JPH07240166A (ja) | 電子顕微鏡 | |
| WO2023095315A1 (ja) | 補正方法及び補正装置 | |
| WO2024262000A1 (ja) | 装置およびその制御方法ならびにプログラム | |
| JPH0329867A (ja) | 電子ビーム装置による電圧分布像の観測法 | |
| JP2013242994A (ja) | 画像処理システム、および画像処理方法 | |
| JP5039633B2 (ja) | 電子顕微鏡、及び非点収差評価方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20944843 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022535998 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20944843 Country of ref document: EP Kind code of ref document: A1 |
|
| WWG | Wipo information: grant in national office |
Ref document number: 18012478 Country of ref document: US |