WO2021131520A1 - センサユニット - Google Patents
センサユニット Download PDFInfo
- Publication number
- WO2021131520A1 WO2021131520A1 PCT/JP2020/044548 JP2020044548W WO2021131520A1 WO 2021131520 A1 WO2021131520 A1 WO 2021131520A1 JP 2020044548 W JP2020044548 W JP 2020044548W WO 2021131520 A1 WO2021131520 A1 WO 2021131520A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- nozzle
- vehicle
- sensor unit
- lidar
- air
- Prior art date
Links
- 238000004140 cleaning Methods 0.000 claims abstract description 85
- 239000007788 liquid Substances 0.000 claims abstract description 84
- 230000005540 biological transmission Effects 0.000 claims description 39
- 238000002347 injection Methods 0.000 claims description 34
- 239000007924 injection Substances 0.000 claims description 34
- 238000013461 design Methods 0.000 claims description 6
- 238000010586 diagram Methods 0.000 description 5
- 238000004891 communication Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 230000002411 adverse Effects 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 238000001514 detection method Methods 0.000 description 2
- 239000012530 fluid Substances 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 229920003002 synthetic resin Polymers 0.000 description 2
- 239000000057 synthetic resin Substances 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 238000007664 blowing Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 239000003599 detergent Substances 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60S—SERVICING, CLEANING, REPAIRING, SUPPORTING, LIFTING, OR MANOEUVRING OF VEHICLES, NOT OTHERWISE PROVIDED FOR
- B60S1/00—Cleaning of vehicles
- B60S1/02—Cleaning windscreens, windows or optical devices
- B60S1/56—Cleaning windscreens, windows or optical devices specially adapted for cleaning other parts or devices than front windows or windscreens
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/86—Combinations of lidar systems with systems other than lidar, radar or sonar, e.g. with direction finders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4811—Constructional features, e.g. arrangements of optical elements common to transmitter and receiver
- G01S7/4813—Housing arrangements
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B17/00—Details of cameras or camera bodies; Accessories therefor
- G03B17/02—Bodies
- G03B17/08—Waterproof bodies or housings
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B30/00—Camera modules comprising integrated lens units and imaging units, specially adapted for being embedded in other devices, e.g. mobile phones or vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60S—SERVICING, CLEANING, REPAIRING, SUPPORTING, LIFTING, OR MANOEUVRING OF VEHICLES, NOT OTHERWISE PROVIDED FOR
- B60S1/00—Cleaning of vehicles
- B60S1/02—Cleaning windscreens, windows or optical devices
- B60S1/46—Cleaning windscreens, windows or optical devices using liquid; Windscreen washers
- B60S1/48—Liquid supply therefor
- B60S1/52—Arrangement of nozzles; Liquid spreading means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60S—SERVICING, CLEANING, REPAIRING, SUPPORTING, LIFTING, OR MANOEUVRING OF VEHICLES, NOT OTHERWISE PROVIDED FOR
- B60S1/00—Cleaning of vehicles
- B60S1/02—Cleaning windscreens, windows or optical devices
- B60S1/54—Cleaning windscreens, windows or optical devices using gas, e.g. hot air
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
- G01S2007/4975—Means for monitoring or calibrating of sensor obstruction by, e.g. dirt- or ice-coating, e.g. by reflection measurement on front-screen
- G01S2007/4977—Means for monitoring or calibrating of sensor obstruction by, e.g. dirt- or ice-coating, e.g. by reflection measurement on front-screen including means to prevent or remove the obstruction
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/09623—Systems involving the acquisition of information from passive traffic signs by means mounted on the vehicle
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/165—Anti-collision systems for passive traffic, e.g. including static obstacles, trees
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
Definitions
- the present invention relates to a sensor unit.
- Patent Document 1 discloses a sensor system mounted on a vehicle, in which a plurality of LiDARs are built in a lamp unit.
- an object of the present invention is to provide a sensor unit provided with a cleaner capable of efficiently cleaning the LiDAR mounted on the sensor unit.
- a cleaner provided with a nozzle for injecting a cleaning medium toward the sensor surface may be mounted on the unit in order to prevent or remove stains on the sensor surface. There is room for improvement in the nozzle mounting structure for the sensor unit.
- an object of the present invention is to provide a sensor unit capable of easily attaching and positioning a plurality of nozzles to a housing.
- a plurality of types of sensors may be integrated. If the light emitted from one of the plurality of types of sensors is received by the other sensor, the sensing of the other sensor may be adversely affected.
- an object of the present invention is to provide a sensor unit capable of suppressing the influence on the sensing of each sensor even when a plurality of types of sensors are mounted.
- the sensor unit is A sensor unit mounted on a vehicle With LiDAR
- a housing for accommodating the LiDAR and A cleaner attached to the housing and having a first nozzle for injecting air onto the first surface to be cleaned corresponding to the LiDAR and a second nozzle for injecting cleaning liquid onto the surface to be cleaned is provided.
- the first nozzle is arranged above the second nozzle.
- the direction of injection of the air from the first nozzle is a direction parallel to the horizontal direction or a direction downward from the horizontal direction.
- the injection direction of the cleaning liquid from the second nozzle is an upward direction from the horizontal direction.
- the sensor unit is A sensor unit mounted on a vehicle With LiDAR
- the sensor unit is A sensor unit mounted on a vehicle With LiDAR
- the present invention it is possible to provide a sensor unit provided with a cleaner capable of efficiently cleaning the LiDAR mounted on the sensor unit.
- a sensor unit capable of easily attaching and positioning a plurality of nozzles to a housing.
- the present invention it is possible to provide a sensor unit capable of suppressing the influence on the sensing of each sensor even when a plurality of types of sensors are mounted.
- the "horizontal direction”, the "front-back direction”, and the “vertical direction” are appropriately referred to for convenience of explanation. These directions are relative directions set for the vehicle 1 shown in FIG.
- the “vertical direction” is a direction including the “upward direction” and the “downward direction”.
- the “front-back direction” is a direction including the “forward direction” and the “rear direction”.
- the “left-right direction” is a direction including the "left direction” and the "right direction”.
- FIG. 1 is a top view of a vehicle 1 equipped with the sensor system 100 according to the present embodiment.
- FIG. 2 is a block diagram of the vehicle system 2 in which the sensor system 100 is incorporated.
- the vehicle 1 includes a sensor system 100.
- the vehicle 1 is a vehicle capable of traveling in the automatic driving mode.
- the vehicle system 2 of the vehicle 1 communicates wirelessly with the vehicle control unit 3, the internal sensor 5, the external sensor 6, the lamp 7, the HMI 8 (Human Machine Information), the GPS 9 (Global Positioning System), and the GPS 9.
- a unit 10 and a map information storage unit 11 are provided.
- the vehicle system 2 includes a steering actuator 12, a steering device 13, a brake actuator 14, a brake device 15, an accelerator actuator 16, and an accelerator device 17.
- a sensor system 100 having a cleaner control unit 113 and a sensor control unit 115 is communicably connected to the vehicle control unit 3 of the vehicle system 2.
- the vehicle control unit 3 is composed of an electronic control unit (ECU).
- the vehicle control unit 3 includes a processor such as a CPU (Central Processing Unit), a ROM (Read Only Memory) in which various vehicle control programs are stored, and a RAM (Random Access Memory) in which various vehicle control data are temporarily stored. It is composed of and.
- the processor is configured to develop a program designated from various vehicle control programs stored in the ROM on the RAM and execute various processes in cooperation with the RAM.
- the vehicle control unit 3 is configured to control the traveling of the vehicle 1.
- the internal sensor 5 is a sensor capable of acquiring information on the own vehicle.
- the internal sensor 5 is, for example, at least one of an acceleration sensor, a speed sensor, a wheel speed sensor, a gyro sensor, and the like.
- the internal sensor 5 is configured to acquire information on the own vehicle including the traveling state of the vehicle 1 and output the information to the vehicle control unit 3.
- the internal sensor 5 includes a seating sensor that detects whether the driver is sitting in the driver's seat, a face orientation sensor that detects the direction of the driver's face, a motion sensor that detects whether or not there is a person in the vehicle, and the like. You may.
- the external sensor 6 is a sensor capable of acquiring information outside the own vehicle.
- the external sensor is, for example, at least one such as a camera, radar, and LiDAR.
- the external sensor 6 acquires information on the outside of the own vehicle including the surrounding environment of the vehicle 1 (other vehicles, pedestrians, road shapes, traffic signs, obstacles, etc.), and uses the information in the vehicle control unit 3 and the sensor control unit. It is configured to output to 115.
- the external sensor 6 may include a weather sensor that detects the weather condition, an illuminance sensor that detects the illuminance of the surrounding environment of the vehicle 1, and the like.
- the camera is a camera including an image sensor such as a CCD (Charge-Coupled Device) or a CMOS (Complementary MOS).
- the camera is a camera that detects visible light or an infrared camera that detects infrared rays.
- the radar is a millimeter wave radar, a microwave radar, a laser radar, or the like.
- LiDAR is an abbreviation for Light Detection and Ringing or Laser Imaging Detection and Ranking. LiDAR generally emits invisible light in front of it, and acquires information such as the distance to the object, the direction of the object, the shape of the object, the material of the object, and the color of the object based on the emitted light and the return light. It is a sensor.
- the ramp 7 is a headlamp or position lamp provided at the front of the vehicle 1, a rear combination lamp provided at the rear of the vehicle 1, a turn signal lamp provided at the front or side of the vehicle, a pedestrian or a driver of another vehicle. It is at least one of various lamps that inform the situation of the own vehicle.
- the HMI 8 is composed of an input unit that receives an input operation from the driver and an output unit that outputs driving information and the like to the driver.
- the input unit includes a steering wheel, an accelerator pedal, a brake pedal, an operation mode changeover switch for switching the operation mode of the vehicle 1, and the like.
- the output unit is a display that displays various driving information.
- the GPS 9 is configured to acquire the current position information of the vehicle 1 and output the acquired current position information to the vehicle control unit 3.
- the wireless communication unit 10 is configured to receive the traveling information of another vehicle around the vehicle 1 from the other vehicle and transmit the traveling information of the vehicle 1 to the other vehicle (vehicle-to-vehicle communication). Further, the wireless communication unit 10 is configured to receive infrastructure information from infrastructure equipment such as traffic lights and indicator lights and to transmit traveling information of vehicle 1 to the infrastructure equipment (road-to-vehicle communication).
- the map information storage unit 11 is an external storage device such as a hard disk drive in which map information is stored, and is configured to output map information to the vehicle control unit 3.
- the vehicle control unit 3 determines at least one of the steering control signal, the accelerator control signal, and the brake control signal based on the traveling state information, the surrounding environment information, the current position information, the map information, and the like. Generate one automatically.
- the steering actuator 12 is configured to receive a steering control signal from the vehicle control unit 3 and control the steering device 13 based on the received steering control signal.
- the brake actuator 14 is configured to receive a brake control signal from the vehicle control unit 3 and control the brake device 15 based on the received brake control signal.
- the accelerator actuator 16 is configured to receive an accelerator control signal from the vehicle control unit 3 and control the accelerator device 17 based on the received accelerator control signal. As described above, in the automatic driving mode, the traveling of the vehicle 1 is automatically controlled by the vehicle system 2.
- the vehicle control unit 3 when the vehicle 1 travels in the manual driving mode, the vehicle control unit 3 generates a steering control signal, an accelerator control signal, and a brake control signal according to the manual operation of the driver on the accelerator pedal, the brake pedal, and the steering wheel.
- the steering control signal, the accelerator control signal, and the brake control signal are generated by the manual operation of the driver, so that the driving of the vehicle 1 is controlled by the driver.
- the operation mode includes an automatic operation mode and a manual operation mode.
- the automatic driving mode includes a fully automatic driving mode, an advanced driving support mode, and a driving support mode.
- the vehicle system 2 automatically performs all driving controls such as steering control, brake control, and accelerator control, and the driver is not in a state where the vehicle 1 can be driven.
- the vehicle system 2 automatically performs all driving control of steering control, brake control, and accelerator control, and the driver does not drive the vehicle 1 although he / she is in a state where he / she can drive the vehicle 1.
- the vehicle system 2 In the driving support mode, the vehicle system 2 automatically performs some driving control of steering control, brake control, and accelerator control, and the driver drives the vehicle 1 under the driving support of the vehicle system 2.
- the vehicle system 2 In the manual driving mode, the vehicle system 2 does not automatically control the driving, and the driver drives the vehicle 1 without the driving support of the vehicle system 2.
- the driving mode of the vehicle 1 may be switched by operating the driving mode changeover switch.
- the vehicle control unit 3 sets the driving mode of the vehicle 1 into four driving modes (fully automatic driving mode, advanced driving support mode, driving support mode, manual driving mode) according to the driver's operation on the driving mode changeover switch. ).
- the driving mode of the vehicle 1 is automatically set based on the information on the travelable section in which the autonomous vehicle can travel, the travel prohibited section in which the autonomous vehicle is prohibited, or the information on the external weather condition. It may be switched.
- the vehicle control unit 3 switches the driving mode of the vehicle 1 based on this information.
- the driving mode of the vehicle 1 may be automatically switched by using a seating sensor, a face orientation sensor, or the like. In this case, the vehicle control unit 3 switches the driving mode of the vehicle 1 based on the output signals from the seating sensor and the face orientation sensor.
- the vehicle 1 has right front LiDAR6fr, left front LiDAR6fl, right rear LiDAR6br, left rear LiDAR6bl, right front camera 6gr, left front camera 6gl, right rear camera 6cr, and left rear camera 6cl as external sensors 6. ..
- the front right LiDAR 6fr, the front right camera 6gr, the front left LiDAR 6fl, and the front left camera 6gl are configured to acquire information in front of the vehicle 1.
- the right rear LiDAR 6br, the right rear camera 6cr, the left rear LiDAR 6bl, and the left rear camera 6cl are configured to acquire information behind the vehicle 1.
- two sets of LiDAR and two cameras are provided in the front part and the rear part of the vehicle 1, for example, in the central part of the front part and the central part of the rear part of the vehicle 1, respectively. It may be provided one set at a time. Further, although the external sensors 6 are provided at the front portion and the rear portion of the vehicle 1, for example, they may be provided at the left and right side portions of the vehicle 1.
- the front right LiDAR6fr, the front right camera 6gr, the front left LiDAR6fl, and the front left camera 6gl are provided at the front of the vehicle 1
- the rear right LiDAR6br, the rear right camera 6cr, the rear left LiDAR6bl, and the rear left camera 6cl are provided at the rear of the vehicle 1.
- the present invention is not limited to this.
- the right front LiDAR6fr, the right front camera 6gr, the left front LiDAR6fl, the left front camera 6gl, the right rear LiDAR6br, the right rear camera 6cr, the left rear LiDAR6bl, and the left rear camera 6cl may be arranged together on the ceiling of the vehicle 1.
- the vehicle 1 has a right headlamp 7r and a left headlamp 7l as the lamp 7.
- the right headlamp 7r is provided on the right side of the front portion of the vehicle 1
- the left headlamp 7l is provided on the left portion of the front portion of the vehicle 1.
- Vehicle 1 has a front window 1f and a rear window 1b.
- the sensor system 100 mounted on the vehicle 1 removes foreign matter such as water droplets, mud, and dust adhering to the object, or prevents the foreign matter from adhering to the object.
- the cleaner unit 110 (described in detail with reference to FIG. 3). ) Is provided.
- the cleaner unit 110 has a front window washer (hereinafter referred to as a front WW) 101 capable of cleaning the front window 1f and a rear window washer (hereinafter referred to as a rear WW) capable of cleaning the rear window 1b. ) 102.
- the cleaner unit 110 includes a right front sensor cleaner (hereinafter referred to as right front SC) 103 capable of cleaning the right front LiDAR 6fr and the right front camera 6gr, and a left front sensor cleaner (hereinafter referred to as left front SC) capable of cleaning the left front LiDAR 6fl and the left front camera 6gr.
- the cleaner unit 110 includes a right rear sensor cleaner (hereinafter referred to as a right rear SC) 105 capable of cleaning the right rear LiDAR 6br and a right rear camera 6cr, and a left rear sensor cleaner (hereinafter referred to as a right rear SC) 105 capable of cleaning the left rear LiDAR 6bl and the left rear camera 6cl.
- the cleaner unit 110 includes a right headlamp cleaner (hereinafter referred to as right HC) 107 capable of cleaning the right headlamp 7r and a left headlamp cleaner (hereinafter referred to as left HC) 108 capable of cleaning the left headlamp 7l.
- right HC right headlamp cleaner
- left HC left headlamp cleaner
- Each of the cleaners 101 to 108 has one or more nozzles, and ejects a cleaning medium such as a cleaning liquid or air from the nozzles toward the object.
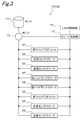
- FIG. 3 is a block diagram of the cleaner unit 110 included in the sensor system 100.
- the cleaner unit 110 includes a tank 111, a pump 112, and a cleaner control unit 113 in addition to the cleaners 101 to 108.
- the front WW101, rear WW102, right front SC103, left front SC104, right rear SC105, left rear SC106, right HC107, and left HC108 are connected to the tank 111 via the pump 112.
- the pump 112 sucks the cleaning liquid stored in the tank 111 and transfers it to the front WW101, the rear WW102, the right front SC103, the left front SC104, the right rear SC105, the left rear SC106, the right HC107, and the left HC108.
- Each of the cleaners 101 to 108 is provided with an actuator (not shown) that opens the nozzle and injects the cleaning liquid onto the object to be cleaned.
- the actuators provided on the cleaners 101 to 108 are electrically connected to the cleaner control unit 113.
- the pump 112 is also electrically connected to the cleaner control unit 113.
- the operations of the cleaners 101 to 108, the pump 112, and the like are controlled by the cleaner control unit 113.
- the cleaner control unit 113 is electrically connected to the vehicle control unit 3.
- the information acquired by the cleaner control unit 113 and the information acquired by the vehicle control unit 3 are transmitted and received between each other.
- the vehicle control unit 3 and the cleaner control unit 113 are provided as separate configurations, but the vehicle control unit 3 and the cleaner control unit 113 may be integrally configured.
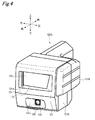
- FIG. 4 is a perspective view showing the sensor unit according to the present embodiment.
- FIG. 5 is an exploded perspective view of the sensor unit observed from the front.
- FIG. 6 is an exploded perspective view of a storage member housed in the housing of the sensor unit.
- FIG. 7 is an exploded perspective view of the sensor unit observed from behind.
- FIG. 8 is a diagram showing a state in which the members shown in FIG. 7 are combined.
- the sensor unit according to this embodiment is configured as a unit in which a sensor such as a LiDAR or a camera and a cleaner for cleaning the sensor are integrated.
- the left front sensor unit 120fl provided in the left front portion of the vehicle 1 will be described.
- the vehicle 1 in addition to the left front sensor unit 120fl provided in the left front portion of the vehicle 1, the vehicle 1 has a right front sensor unit 120fr provided in the right front portion of the vehicle 1 and a right rear sensor provided in the right rear portion. It has a unit 120 br and a left rear sensor unit 120 bl provided at the left rear portion.
- the right front sensor unit 120fr, the right rear sensor unit 120br, and the left rear sensor unit 120bl have the same configurations as the left front sensor unit 120fl, and thus the description thereof will be omitted.
- the left front sensor unit 120fl includes a housing 121, a left front LiDAR 6fl, a left front camera 6 gl, a left front LiDAR cleaner 104A, and a left front camera cleaner 104B.
- the left front LiDAR cleaner 104A and the left front camera cleaner 104B are cleaners constituting the left front SC104.
- the housing 121 is made of, for example, synthetic resin and is formed in a substantially box shape.
- the housing 121 has a front case 121A, a rear case 121B attached to the rear of the front case 121A, and a plate 121C attached to the left side of the front case 121A.
- An upper opening 122 and a lower opening 123 are formed on the front surface 124 (design surface forming the appearance of the vehicle) of the front case 121A.
- the upper opening 122 is formed in a recess 124a provided on the front surface 124.
- the lower opening 123 is formed in a recess 124b provided on the front surface 124.
- the upper opening 122 is formed above the lower opening 123.
- a side opening 127 is formed on the left side of the front case 121A.
- the plate 121C is attached to the front case 121A so as to cover the side opening 127.
- the upper opening 122 is formed in a size including the front region of the left front LiDAR 6fl housed in the housing 121.
- the upper opening 122 is formed in a horizontally long rectangular shape that is long in the left-right direction.
- the upper opening 122 is formed in a horizontally long trapezoidal shape in which the width in the left-right direction becomes narrower from the upper side to the lower side.
- the lower opening 123 is formed in a size including the front region of the left front camera 6 gl housed in the housing 121.
- the lower opening 123 is formed in a circular shape, for example.
- the left front LiDAR 6fl and the left front camera 6gl are housed in the space formed by combining the front case 121A, the rear case 121B, and the plate 121C. In the space, the left front LiDAR 6fl is arranged above the left front camera 6 gl.
- a transmission cover 125 is attached to the upper opening 122 formed in the recess 124a of the front case 121A so as to cover the upper opening 122 without a gap.
- the transparent cover 125 is made of, for example, a transparent or translucent synthetic resin.
- the transparent cover 125 is formed in a horizontally long rectangular shape that is long in the left-right direction.
- the transparent cover 125 is formed in a horizontally long trapezoidal shape in which the width in the left-right direction becomes narrower from the upper side to the lower side.
- the transmission cover 125 is attached so as to extend in a direction inclined with respect to a plane orthogonal to the optical axis of the left front LiDAR 6fl housed in the housing 121.
- the transmission cover 125 is attached so as to be inclined so as to enter the back side (rear side) of the housing 121 from the upper side to the lower side.
- the transmission cover 125 is attached so as to cover the front region of the left front LiDAR 6fl by covering the upper opening 122.
- the transmission cover 125 is attached so as to cover the front area of the left front LiDAR6fl, and is configured as an example of the surface to be cleaned corresponding to the left front LiDAR6fl of the left front sensor unit 120fl.
- a transmission cover 126 is attached to the lower opening 123 formed in the recess 124b of the front case 121A so as to cover the lower opening 123 without a gap.
- the transmission cover 126 has an infrared light cut filter function that cuts infrared light.
- the transmission cover 126 is formed in a circular shape, for example.
- the transmission cover 126 is attached so as to cover the front area of the left front camera 6 gl housed in the housing 121 by covering the lower opening 123.
- the transmission cover 126 is arranged between the front surface 124 of the front case 121A, which constitutes the vehicle appearance of the housing 121, and the light receiving portion of the left front camera 6 gl.
- the transmission cover 126 is attached so as to cover the front area of the left front camera 6 gl, and is configured as a surface to be cleaned corresponding to the left front camera 6 gl of the left front sensor unit 120 fl.
- the left front LiDAR cleaner 104A is a cleaner capable of cleaning the surface to be cleaned corresponding to the left front LiDAR 6fl, that is, the transparent cover 125 covering the front area of the left front LiDAR 6fl with a cleaning medium.
- the left front camera cleaner 104B is a cleaner capable of cleaning the surface to be cleaned corresponding to the left front camera 6 gl, that is, the transparent cover 126 covering the front region of the left front camera 6 gl with a cleaning medium.
- the storage member 150 housed in the housing 121 includes a nozzle holding member 151, a LiDAR holding member 152, and a camera holding member in addition to the left front LiDAR cleaner 104A and the left front camera cleaner 104B.
- the member 153 and the like are included.
- the left front LiDAR cleaner 104A includes air nozzles 131 and 132 (an example of the first nozzle) capable of injecting air toward the transmission cover 125, which is a surface to be cleaned corresponding to the left front LiDAR 6fl, and a liquid nozzle 133 (third) capable of injecting cleaning liquid.
- air nozzles 131 and 132 an example of the first nozzle
- a liquid nozzle 133 third
- the air nozzle 131 has an injection opening 131a for injecting air.
- An air tip 134 for diffusing the air injected from the air nozzle 131 is attached to the injection opening 131a.
- the air nozzle 132 has an injection opening 132a for injecting air.
- An air tip 135 for diffusing the air injected from the air nozzle 132 is attached to the injection opening 132a.
- the liquid nozzle 133 has an injection opening 133a for injecting a cleaning liquid.
- a connecting portion 136 for feeding the cleaning liquid to the liquid nozzle 133 is connected to the liquid nozzle 133.
- An opening 136a is formed in the connecting portion 136.
- a liquid tip 137 for diffusing the cleaning liquid ejected from the liquid nozzle 133 is attached to the opening 136a.
- the liquid tip 137 is attached to the opening 136a of the connecting portion 136, and the connecting portion 136 is connected to the liquid nozzle 133, so that the liquid tip 137 is housed in the injection opening 133a of the liquid nozzle 133.
- the liquid nozzle 133 may be a fluidized nozzle (oscillating injection nozzle) that changes the injection direction of the fluid by interfering the fluids flowing inside the nozzle with each other.
- the nozzle holding member 151 is a member that holds the air nozzles 131 and 132 and the liquid nozzle 133.
- the nozzle holding member 151 is formed with a holding hole 151a for holding the air nozzle 131, a holding hole 151b for holding the air nozzle 132, and a holding hole 151c for holding the liquid nozzle 133.
- the nozzle holding member 151 is fixed to the front case 121A by, for example, screwing.
- the front case 121A is formed with a holding groove 161 for holding the air nozzle 131, a holding groove 162 for holding the air nozzle 132, and a holding groove 163 for holding the liquid nozzle 133 (FIG. 7). reference).
- the air nozzles 131, 132 and the liquid nozzle 133 are held in the holding holes 151a, 151b, 151c and the holding grooves 161, 162, 163, respectively, so that the injection openings 131a, 132a, 133a of each nozzle are oriented in a predetermined direction. It is positioned so that In the positioned air nozzles 131 and 132 and the liquid nozzle 133, the nozzle holding member 151 is fixed to the front case 121A, so that the air injection direction from the air nozzles 131 and 132 to the transmission cover 125 which is the surface to be cleaned and the liquid are injected. The injection direction of the cleaning liquid from the nozzle 133 is determined.
- the left front camera cleaner 104B has an air nozzle 141 (an example of a third nozzle) capable of injecting air toward the transmission cover 126, which is a surface to be cleaned corresponding to the left front camera 6 gl.
- the air nozzle 141 has an injection opening 141a for injecting air.
- An air tip 142 for diffusing the air injected from the air nozzle 141 is attached to the injection opening 141a.
- an air nozzle capable of injecting air is provided as a nozzle for injecting the cleaning medium on the transmission cover 126, which is the surface to be cleaned corresponding to the left front camera 6 gl, but the present invention is not limited to this.
- a liquid nozzle capable of injecting a cleaning liquid or a gas-liquid nozzle capable of selectively injecting a cleaning liquid and air may be provided.
- the LiDAR holding member 152 is a member that holds the left front LiDAR 6fl.
- the LiDAR holding member 152 is attached to the front case 121A, for example, by screwing. By attaching the LiDAR holding member 152 to the front case 121A, the left front LiDAR6fl is held by the LiDAR holding member 152 from the rear side and is fixed to the front case 121A.
- the camera holding member 153 is a member that holds the left front camera 6 gl, and has an upper holding member 153a and a lower holding member 153b.
- the upper holding member 153a holds the left front camera 6gl from the upper side by being screwed to the lower holding member 153b, for example.
- the lower holding member 153b holds the left front camera 6gl from the lower side by screwing the upper holding member 153a to the lower holding member 153b.
- the lower holding member 153b is attached to the front case 121A by, for example, screwing. By attaching the lower holding member 153b to the front case 121A, the left front camera 6gl is fixed to the front case 121A.
- the left front LiDAR cleaner 104A and the left front camera cleaner 104B are electrically connected to the cleaner control unit 113. Further, the air nozzles 131 and 132 of the left front LiDAR cleaner 104A are connected to a high pressure air supply device capable of delivering high pressure air or an air blower capable of continuously blowing air via a hose. .. The liquid nozzle 133 of the left front LiDAR cleaner 104A is connected to a pump 112 capable of transferring the cleaning liquid in the tank 111 via a hose.
- the air nozzle 141 of the left front camera cleaner 104B is connected to the high pressure air supply device or the air blower via a hose like the air nozzles 131 and 132 of the left front LiDAR cleaner 104A.
- the operation of the left front LiDAR cleaner 104A and the left front camera cleaner 104B is controlled by the cleaner control unit 113.
- the cleaner control unit 113 operates the left front LiDAR cleaner 104A and the left front camera cleaner 104B based on the dirt state information of the cleaning target surface (transmission covers 125, 126) determined by the sensor control unit 115, and the cleaning target. Clean the surface.
- the left front LiDAR 6fl and the left front camera 6gl are electrically connected to the sensor control unit 115.
- the operation of the left front LiDAR 6fl and the left front camera 6gl is controlled by the sensor control unit 115.
- the sensor control unit 115 receives distance information, direction information, and the like regarding an object around the vehicle acquired by the left front LiDAR6fl from the left front LiDAR6fl. Further, the sensor control unit 115 receives image information, distance information, and the like regarding an object around the vehicle acquired by the left front camera 6 gl from the left front camera 6 gl.
- the sensor control unit 115 is a transmission cover 125 which is a cleaning target surface corresponding to the left front LiDAR 6fl and a cleaning target 126 which is a cleaning target surface corresponding to the left front camera 6gl based on each information received from the left front LiDAR 6fl and the left front camera 6gl. Determine the dirt state.
- the sensor control unit 115 may be provided outside the housing 121, or may be provided inside the housing 121.
- the sensor control unit 115 is electrically connected to the cleaner control unit 113.
- the information acquired by the sensor control unit 115 and the information acquired by the cleaner control unit 113 are transmitted and received between each other.
- the sensor control unit 115 is electrically connected to the vehicle control unit 3.
- the information acquired by the sensor control unit 115 and the information acquired by the vehicle control unit 3 are transmitted and received between each other.
- the cleaner control unit 113, the sensor control unit 115, and the vehicle control unit 3 are provided as separate configurations, but the cleaner control unit 113, the sensor control unit 115, and the vehicle control unit 3 are integrally provided. It may be configured. Further, some of these control units may be integrally configured.
- FIG. 9 is a front view of the left front sensor unit 120fl.
- air nozzles 131 and 132 and a liquid nozzle 133 for cleaning the transmission cover 125 which is a surface to be cleaned corresponding to the left front LiDAR 6fl, are provided in the upper right side portion of the front case 121A.
- the air nozzles 131 and 132 and the liquid nozzle 133 are arranged in parallel in the vertical direction along the right short side 125a of the transparent cover 125 having a horizontally long rectangular shape.
- the air nozzles 131 and 132 are arranged above the liquid nozzle 133. In the example shown in FIG.
- the air nozzle 131 is arranged at the uppermost portion, the air nozzle 132 is arranged below the air nozzle 131, and the liquid nozzle 133 is arranged at the lowermost portion which is the lower side of the air nozzle 132.
- two air nozzles 131 and 132 are provided as air nozzles, but the number of air nozzles is not limited to this.
- the number of air nozzles may be, for example, one or three or more.
- the number of liquid nozzles 133 may be two or more.
- the air nozzles 131 and 132 and the liquid nozzle 133 are provided so as to inject the cleaning medium (air and cleaning liquid) from the right side to the left side of the left front sensor unit 120fl. That is, the air nozzles 131 and 132 and the liquid nozzle 133 are provided so as to inject the cleaning medium from the inside (center side) to the outside (side side) of the vehicle 1.
- the air nozzle 131 is provided so that the injection direction of the air injected from the air nozzle 131 is slightly downward from the horizontal direction as indicated by the arrow A.
- the air nozzle 132 is provided so that the injection direction of the air injected from the air nozzle 132 is parallel to the horizontal direction as indicated by the arrow B.
- the liquid nozzle 133 is provided so that the injection direction of the cleaning liquid ejected from the liquid nozzle 133 is upward from the horizontal direction as indicated by the arrow C.
- an air nozzle 141 for cleaning the transmission cover 126 which is the surface to be cleaned corresponding to the left front camera 6 gl.
- the air nozzle 141 is arranged above the circular transmission cover 126.
- the air nozzle 141 is provided so that the injection direction of the air injected from the air nozzle 141 is substantially the central portion of the transmission cover 126 as indicated by the arrow D.
- the location where the air nozzle 141 is arranged is not limited to the upper side of the transmission cover 126, and may be, for example, the side portion of the transmission cover 126 (on the right side in the case of the left front camera 6 gl).
- the left front sensor unit 120fl of the present embodiment is attached to the left front LiDAR6fl, the housing 121 accommodating the left front LiDAR6fl, and the housing 121, and is attached to the housing 121 to correspond to the left front LiDAR6fl (the first cleaning target surface). It is provided with a left front LiDAR cleaner 104A having an air nozzles 131 and 132 for injecting air into the transmission cover 125, which is an example), and a liquid nozzle 133 for injecting cleaning liquid onto the transmission cover 125.
- the air nozzles 131 and 132 are arranged above the liquid nozzle 133, and the air injection direction from the air nozzles 131 and 132 is parallel to the horizontal direction or downward from the horizontal direction, and is from the liquid nozzle 133.
- the injection direction of the cleaning liquid is an upward direction rather than a horizontal direction.
- the cleaning medium ejected from the nozzle is air or a cleaning liquid
- the air is more susceptible to the influence of running wind and gravity than the cleaning liquid. Therefore, for example, when the cleaning medium is to be injected at a predetermined point, it is more accurate to inject the cleaning liquid from the lower side to the upper side against the running wind or gravity than to inject the air from the lower side to the upper side. Can be sprayed on.
- the air nozzles 131 and 132 for injecting air are arranged above the liquid nozzle 133 for injecting the cleaning liquid, and the injection direction of the air injected from the air nozzles 131 and 132 is horizontal or horizontal.
- the downward direction by setting the injection direction of the cleaning liquid ejected from the liquid nozzle 133 to be upward from the horizontal, air can be appropriately injected to the permeation cover 125. Therefore, according to the left front sensor unit 120fl, efficient cleaning is possible for the left front LiDAR 6fl mounted on the left front sensor unit 120fl.
- the left front sensor unit 120fl is further provided with a nozzle holding member 151 attached to the housing 121 to hold the air nozzles 131 and 132 and the liquid nozzle 133.
- the nozzle holding member 151 is configured to position the air injection direction from the air nozzles 131 and 132 and the cleaning liquid injection direction from the liquid nozzle 133, respectively.
- the air nozzles 131 and 132 and the liquid nozzle 133 are inserted into the holding holes 151a, 151b and 151c of the nozzle holding member 151, respectively, and the nozzle holding member 151 is fixed to the front case 121A to determine each nozzle.
- the air injected from the air nozzles 131 and 132 and the cleaning liquid injected from the liquid nozzle 133 flow from the inside (center side) to the outside (side side) of the vehicle 1. As described above, it is attached to the housing 121. According to this configuration, air or cleaning liquid can be injected in an injection direction that does not oppose the running wind, so that the cleaning effect can be improved.
- the transmission cover 125 which is the surface to be cleaned corresponding to the left front LiDAR6fl, is formed in a horizontally long rectangular shape, and the nozzle holding member 151 is the air nozzles 131, 132 and the liquid nozzle along the right short side 125a of the transmission cover 125. It is attached to the housing 121 so that 133 is arranged.
- the cleaning medium is ejected from one nozzle, it is usually possible to inject the cleaning medium into a wider area in the front direction than in the vertical direction.
- a plurality of air nozzles (for example, two air nozzles 131 and 132) are arranged in parallel along the right short side 125a of the transmission cover 125.
- the transmission cover 125 can be cleaned by a plurality of air nozzles, so that the cleaning effect by air can be enhanced. Therefore, dirt that cannot be completely cleaned by the air ejected from a single air nozzle can be cleaned by the air ejected from a plurality of air nozzles, and the number of cleanings by the liquid nozzle 133 can be reduced. , It is possible to save water in the cleaning liquid.
- the left front camera 6 gl arranged below the left front LiDAR 6fl is further provided, and the left front camera cleaner 104B is a transmission cover 126 which is a cleaning target surface (an example of a second cleaning target surface) corresponding to the left front camera 6 gl. It has an air nozzle 141 capable of injecting air into the air nozzle 141. According to this configuration, efficient cleaning can be performed on the left front sensor unit 120fl in which the left front LiDAR 6fl and the left front camera 6gl are integrated. That is, by providing the function of cleaning the transmission cover 126 of the left front camera 6 gl, it is possible to remove the dirt adhering to the transmission cover 126 or prevent the dirt from adhering to the transmission cover 126. As a result, it is possible to suppress the adverse effect of dirt on the captured image acquired by the left front camera 6 gl.
- the left front camera 6 gl is arranged between the design surface (front surface 124) forming the vehicle appearance of the housing 121 and the light receiving portion of the left front camera 6 gl, and has an infrared light cut filter function for cutting infrared light. It has a transparent cover 126 having the above. According to this configuration, even when the left front LiDAR 6fl and the left front camera 6gl are arranged close to each other in one housing 121, the reflected light of the infrared light emitted from the left front LiDAR 6fl is the light receiving portion of the left front camera 6gl. It can be prevented from entering by the transparent cover 126. As a result, it is possible to suppress the adverse effect of the infrared light from the left front LiDAR 6fl on the captured image acquired by the left front camera 6 gl.
- the transmission cover 126 is arranged in the recess 124b formed on the design surface (front surface 124). According to this configuration, since the transparent cover 126 covering the front area of the left front camera 6 gl is provided in a retracted state, the left front camera 6 gl and the left front LiDAR 6fl are arranged close to each other in the same housing 121. Also, it is possible to prevent the infrared light emitted from the left front LiDAR 6fl from directly incident on the light receiving portion of the left front camera 6 gl.
- the left front sensor unit 120fl is mounted on a vehicle capable of automatic driving has been described, but the left front sensor unit 120fl may be mounted on a vehicle that cannot be automatically driven.
- the left front LiDAR6fl is arranged above and the left front camera 6gl is arranged below the left front LiDAR6fl in the left front sensor unit 120fl, but the present invention is not limited to this example.
- the left front camera 6 gl may be arranged above, and the left front LiDAR 6fl may be arranged below the left front camera 6 gl.
- the cleaning liquid sprayed from the liquid nozzle 133 of the left front LiDAR 6fl contains water or detergent.
- the cleaning media sprayed on the front and rear windows 1f, 1b, headlamps 7l, 7r, LiDAR6fl, 6fr, 6bl, 6br, and cameras 6gl, 6gr, 6cl, 6cr may be different or the same. Good.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Electromagnetism (AREA)
- Mechanical Engineering (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Traffic Control Systems (AREA)
Abstract
車両に搭載されるセンサユニットは、左前LiDARと、左前LiDARを収容するハウジング(121)と、ハウジング(121)に取り付けられる左前センサクリーナと、を備える。左前センサクリーナは、左前LiDARに対応する透過カバー(125)(洗浄対象面)へ空気を噴射するエアノズル(131,132)と、透過カバー(125)へ洗浄液を噴射する液ノズル(133)と、を有する。エアノズル(131,132)は、液ノズル(133)よりも上方に配置されている。エアノズル(131,132)からの空気の噴射方向は水平方向に平行な方向または水平方向よりも下向きの方向であり、液ノズル(133)からの洗浄液の噴射方向は水平方向よりも上向きの方向である。
Description
本発明は、センサユニットに関する。
近年は自動運転可能な車両の開発が試みられている。自動運転を実現するにあたっては、例えば、LiDARやカメラなどのセンサを利用して車両外部の情報を取得することが求められる。特許文献1には、車両に搭載されるセンサシステムであって、複数のLiDARがランプユニットに内蔵されている構成が開示されている。
特許文献1に記載のようなセンサシステムにおいて、センサへの汚れ防止又は汚れ除去のためのクリーナからの洗浄媒体の噴射方向については改善の余地がある。
そこで、本発明は、センサユニットに搭載されるLiDARに対して効率的な洗浄が可能なクリーナを備えたセンサユニットを提供することを目的とする。
また、特許文献1に記載のようなユニットにおいて、センサ面への汚れ防止又は汚れ除去のために洗浄媒体をセンサ面へ対して噴射するノズルを備えたクリーナがユニットに搭載される場合がある。センサユニットに対するノズルの取り付け構造については改善の余地がある。
そこで、本発明は、ハウジングに対する複数のノズルの容易な取り付けと位置決めが可能なセンサユニットを提供することを目的とする。
さらに、特許文献1に記載のようなユニットにおいて、複数種のセンサが一体化される場合がある。複数種のセンサのうち、一のセンサから出射される光が他のセンサにより受光されると、当該他のセンサのセンシングに悪影響を及ぼす可能性がある。
そこで、本発明は、複数種のセンサが搭載された場合でも各センサのセンシングに及ぼす影響を抑制可能なセンサユニットを提供することを目的とする。
上記目的を達成するために、本発明の一側面に係るセンサユニットは、
車両に搭載されるセンサユニットであって、
LiDARと、
前記LiDARを収容するハウジングと、
前記ハウジングに取り付けられて、前記LiDARに対応する第一洗浄対象面へ空気を噴射する第一ノズルと、前記第一洗浄対象面へ洗浄液を噴射する第二ノズルと、を有するクリーナと、を備え、
前記第一ノズルは前記第二ノズルよりも上方に配置され、
前記第一ノズルからの前記空気の噴射方向は水平方向に平行な方向または前記水平方向よりも下向きの方向であり、
前記第二ノズルからの前記洗浄液の噴射方向は前記水平方向よりも上向きの方向である。
車両に搭載されるセンサユニットであって、
LiDARと、
前記LiDARを収容するハウジングと、
前記ハウジングに取り付けられて、前記LiDARに対応する第一洗浄対象面へ空気を噴射する第一ノズルと、前記第一洗浄対象面へ洗浄液を噴射する第二ノズルと、を有するクリーナと、を備え、
前記第一ノズルは前記第二ノズルよりも上方に配置され、
前記第一ノズルからの前記空気の噴射方向は水平方向に平行な方向または前記水平方向よりも下向きの方向であり、
前記第二ノズルからの前記洗浄液の噴射方向は前記水平方向よりも上向きの方向である。
上記目的を達成するために、本発明の一側面に係るセンサユニットは、
車両に搭載されるセンサユニットであって、
LiDARと、
前記LiDARを収容するハウジングと、
前記ハウジングに取り付けられて、前記LiDARに対応する第一洗浄対象面へ空気を噴射する第一ノズルと、前記第一洗浄対象面へ洗浄液を噴射する第二ノズルと、を有するクリーナと、
前記ハウジングに取り付けられて、前記第一ノズルおよび前記第二ノズルを保持する保持部材と、
を備え、
前記保持部材は、前記第一ノズルからの前記空気の噴射方向と前記第二ノズルからの前記洗浄液の噴射方向とをそれぞれ位置決めするように構成されている。
車両に搭載されるセンサユニットであって、
LiDARと、
前記LiDARを収容するハウジングと、
前記ハウジングに取り付けられて、前記LiDARに対応する第一洗浄対象面へ空気を噴射する第一ノズルと、前記第一洗浄対象面へ洗浄液を噴射する第二ノズルと、を有するクリーナと、
前記ハウジングに取り付けられて、前記第一ノズルおよび前記第二ノズルを保持する保持部材と、
を備え、
前記保持部材は、前記第一ノズルからの前記空気の噴射方向と前記第二ノズルからの前記洗浄液の噴射方向とをそれぞれ位置決めするように構成されている。
上記目的を達成するために、本発明の一側面に係るセンサユニットは、
車両に搭載されるセンサユニットであって、
LiDARと、
受光部を備えたカメラと、
前記LiDARおよび前記カメラを収容するハウジングと、
を備え、
前記カメラは、前記ハウジングの車両外観をなす意匠面の外部と前記受光部との間に配置されて、赤外光をカットする赤外光カットフィルタ機能を有する透過カバーを有している。
車両に搭載されるセンサユニットであって、
LiDARと、
受光部を備えたカメラと、
前記LiDARおよび前記カメラを収容するハウジングと、
を備え、
前記カメラは、前記ハウジングの車両外観をなす意匠面の外部と前記受光部との間に配置されて、赤外光をカットする赤外光カットフィルタ機能を有する透過カバーを有している。
本発明によれば、センサユニットに搭載されるLiDARに対して効率的な洗浄が可能なクリーナを備えたセンサユニットを提供することができる。
また、本発明によれば、ハウジングに対する複数のノズルの容易な取り付けと位置決めが可能なセンサユニットを提供することができる。
さらに、本発明によれば、複数種のセンサが搭載された場合でも各センサのセンシングに及ぼす影響を抑制可能なセンサユニットを提供することができる。
以下、本発明の実施形態について図面を参照しながら説明する。尚、実施形態の説明において既に説明された部材と同一の参照番号を有する部材については、説明の便宜上、その説明は省略する。また、本図面に示された各部材の寸法は、説明の便宜上、実際の各部材の寸法とは異なる場合がある。
また、本発明の実施形態(以下、本実施形態と称す)の説明では、説明の便宜上、「左右方向」、「前後方向」、「上下方向」について適宜言及する。これらの方向は、図1に示す車両1について設定された相対的な方向である。ここで、「上下方向」は、「上方向」及び「下方向」を含む方向である。「前後方向」は、「前方向」及び「後方向」を含む方向である。「左右方向」は、「左方向」及び「右方向」を含む方向である。
図1は、本実施形態に係るセンサシステム100が搭載された車両1の上面図である。図2は、センサシステム100が組み込まれる車両システム2のブロック図である。車両1は、センサシステム100を備えている。本実施形態において、車両1は自動運転モードで走行可能な自動車である。
まず、図2を参照して車両1の車両システム2について説明する。
図2に示すように、車両システム2は、車両制御部3と、内部センサ5と、外部センサ6と、ランプ7と、HMI8(Human Machine Interface)と、GPS9(Global Positioning System)と、無線通信部10と、地図情報記憶部11とを備えている。さらに、車両システム2は、ステアリングアクチュエータ12と、ステアリング装置13と、ブレーキアクチュエータ14と、ブレーキ装置15と、アクセルアクチュエータ16と、アクセル装置17とを備えている。また、車両システム2の車両制御部3には、クリーナ制御部113とセンサ制御部115とを有するセンサシステム100が通信可能に接続されている。
図2に示すように、車両システム2は、車両制御部3と、内部センサ5と、外部センサ6と、ランプ7と、HMI8(Human Machine Interface)と、GPS9(Global Positioning System)と、無線通信部10と、地図情報記憶部11とを備えている。さらに、車両システム2は、ステアリングアクチュエータ12と、ステアリング装置13と、ブレーキアクチュエータ14と、ブレーキ装置15と、アクセルアクチュエータ16と、アクセル装置17とを備えている。また、車両システム2の車両制御部3には、クリーナ制御部113とセンサ制御部115とを有するセンサシステム100が通信可能に接続されている。
車両制御部3は、電子制御ユニット(ECU)により構成されている。車両制御部3は、CPU(Central Processing Unit)等のプロセッサと、各種車両制御プログラムが記憶されたROM(Read Only Memory)と、各種車両制御データが一時的に記憶されるRAM(Random Access Memory)とにより構成されている。プロセッサは、ROMに記憶された各種車両制御プログラムから指定されるプログラムをRAM上に展開し、RAMとの協働で各種処理を実行するように構成されている。車両制御部3は、車両1の走行を制御するように構成されている。
内部センサ5は、自車両の情報を取得可能なセンサである。内部センサ5は、例えば、加速度センサ、速度センサ、車輪速センサ及びジャイロセンサ等の少なくとも一つである。内部センサ5は、車両1の走行状態を含む自車両の情報を取得し、該情報を車両制御部3に出力するように構成されている。内部センサ5は、運転者が運転席に座っているかどうかを検出する着座センサ、運転者の顔の方向を検出する顔向きセンサ、車内に人がいるかどうかを検出する人感センサなどを備えていてもよい。
外部センサ6は、自車両の外部の情報を取得可能なセンサである。外部センサは、例えば、カメラ、レーダ、LiDAR等の少なくとも一つである。外部センサ6は、車両1の周辺環境(他車、歩行者、道路形状、交通標識、障害物等)を含む自車両の外部の情報を取得し、該情報を車両制御部3及びセンサ制御部115に出力するように構成されている。あるいは、外部センサ6は、天候状態を検出する天候センサや車両1の周辺環境の照度を検出する照度センサなどを備えていてもよい。例えば、カメラは、 CCD(Charge-Coupled Device)やCMOS(相補型MOS)等の撮像素子を含むカメラである。カメラは、可視光を検出するカメラや、赤外線を検出する赤外カメラである。レーダは、ミリ波レーダ、マイクロ波レーダ又はレーザーレーダ等である。LiDARとは、Light Detection and RangingまたはLaser Imaging Detection and Rangingの略語である。LiDARは、一般にその前方に非可視光を出射し、出射光と戻り光とに基づいて、物体までの距離、物体の方向、物体の形状、物体の材質、物体の色などの情報を取得するセンサである。
ランプ7は、車両1の前部に設けられるヘッドランプやポジションランプ、車両1の後部に設けられるリヤコンビネーションランプ、車両の前部または側部に設けられるターンシグナルランプ、歩行者や他車両のドライバーに自車両の状況を知らせる各種ランプなどの少なくとも一つである。
HMI8は、運転者からの入力操作を受付ける入力部と、走行情報等を運転者に向けて出力する出力部とから構成される。入力部は、ステアリングホイール、アクセルペダル、ブレーキペダル、車両1の運転モードを切替える運転モード切替スイッチ等を含む。出力部は、各種走行情報を表示するディスプレイである。
GPS9は、車両1の現在位置情報を取得し、当該取得された現在位置情報を車両制御部3に出力するように構成されている。無線通信部10は、車両1の周囲にいる他車の走行情報を他車から受信すると共に、車両1の走行情報を他車に送信するように構成されている(車車間通信)。また、無線通信部10は、信号機や標識灯等のインフラ設備からインフラ情報を受信すると共に、車両1の走行情報をインフラ設備に送信するように構成されている(路車間通信)。地図情報記憶部11は、地図情報が記憶されたハードディスクドライブ等の外部記憶装置であって、地図情報を車両制御部3に出力するように構成されている。
車両1が自動運転モードで走行する場合、車両制御部3は、走行状態情報、周辺環境情報、現在位置情報、地図情報等に基づいて、ステアリング制御信号、アクセル制御信号及びブレーキ制御信号のうち少なくとも一つを自動的に生成する。ステアリングアクチュエータ12は、ステアリング制御信号を車両制御部3から受信して、受信したステアリング制御信号に基づいてステアリング装置13を制御するように構成されている。ブレーキアクチュエータ14は、ブレーキ制御信号を車両制御部3から受信して、受信したブレーキ制御信号に基づいてブレーキ装置15を制御するように構成されている。アクセルアクチュエータ16は、アクセル制御信号を車両制御部3から受信して、受信したアクセル制御信号に基づいてアクセル装置17を制御するように構成されている。このように、自動運転モードでは、車両1の走行は車両システム2により自動制御される。
一方、車両1が手動運転モードで走行する場合、車両制御部3は、アクセルペダル、ブレーキペダル及びステアリングホイールに対する運転者の手動操作に従って、ステアリング制御信号、アクセル制御信号及びブレーキ制御信号を生成する。このように、手動運転モードでは、ステアリング制御信号、アクセル制御信号及びブレーキ制御信号が運転者の手動操作によって生成されるので、車両1の走行は運転者により制御される。
次に、車両1の運転モードについて説明する。運転モードは、自動運転モードと手動運転モードとからなる。自動運転モードは、完全自動運転モードと、高度運転支援モードと、運転支援モードとからなる。完全自動運転モードでは、車両システム2がステアリング制御、ブレーキ制御及びアクセル制御の全ての走行制御を自動的に行うと共に、運転者は車両1を運転できる状態にはない。高度運転支援モードでは、車両システム2がステアリング制御、ブレーキ制御及びアクセル制御の全ての走行制御を自動的に行うと共に、運転者は車両1を運転できる状態にはあるものの車両1を運転しない。運転支援モードでは、車両システム2がステアリング制御、ブレーキ制御及びアクセル制御のうち一部の走行制御を自動的に行うと共に、車両システム2の運転支援の下で運転者が車両1を運転する。一方、手動運転モードでは、車両システム2が走行制御を自動的に行わないと共に、車両システム2の運転支援なしに運転者が車両1を運転する。
また、車両1の運転モードは、運転モード切替スイッチを操作することで切り替えられてもよい。この場合、車両制御部3は、運転モード切替スイッチに対する運転者の操作に応じて、車両1の運転モードを4つの運転モード(完全自動運転モード、高度運転支援モード、運転支援モード、手動運転モード)の間で切り替える。また、車両1の運転モードは、自動運転車が走行可能である走行可能区間や自動運転車の走行が禁止されている走行禁止区間についての情報または外部天候状態についての情報に基づいて自動的に切り替えられてもよい。この場合、車両制御部3は、これらの情報に基づいて車両1の運転モードを切り替える。さらに、車両1の運転モードは、着座センサや顔向きセンサ等を用いることで自動的に切り替えられてもよい。この場合、車両制御部3は、着座センサや顔向きセンサからの出力信号に基づいて、車両1の運転モードを切り替える。
図1に戻り、車両1は、外部センサ6として、右前LiDAR6fr、左前LiDAR6fl、右後LiDAR6br、左後LiDAR6bl、右前カメラ6gr、左前カメラ6gl、右後カメラ6cr、左後カメラ6clを有している。右前LiDAR6fr、右前カメラ6gr、左前LiDAR6fl、および左前カメラ6glは、車両1の前方の情報を取得するように構成されている。右後LiDAR6br、右後カメラ6cr、左後LiDAR6bl、および左後カメラ6clは、車両1の後方の情報を取得するように構成されている。
なお、図1に示す例では、LiDARとカメラは、車両1の前部と後部にそれぞれ2組ずつ設けられているが、例えば、車両1の前部の中央部と後部の中央部とにそれぞれ1組ずつ設けられるようにしてもよい。また、外部センサ6は、車両1の前部と後部に設けられているが、例えば、車両1の左右側部に設けられていてもよい。また、右前LiDAR6frと右前カメラ6grと左前LiDAR6flと左前カメラ6glは車両1の前部に設けられ、右後LiDAR6brと右後カメラ6crと左後LiDAR6blと左後カメラ6clは車両1の後部に設けられているが、本発明はこれに限られない。例えば、車両1の天井部に右前LiDAR6fr、右前カメラ6gr、左前LiDAR6fl、左前カメラ6gl、右後LiDAR6br、右後カメラ6cr、左後LiDAR6bl、および左後カメラ6clがまとめて配置されていてもよい。
車両1は、ランプ7として、右ヘッドランプ7rと左ヘッドランプ7lを有している。右ヘッドランプ7rは車両1の前部のうちの右部に設けられ、左ヘッドランプ7lは車両1の前部のうちの左部に設けられている。
車両1は、フロントウィンドウ1fと、リヤウィンドウ1bを有している。
車両1に搭載されたセンサシステム100は、対象物に付着する水滴や泥や塵埃等の異物を除去、あるいは、対象物へ異物が付着することを防止するクリーナユニット110(図3で詳述する)を備えている。例えば、本実施形態において、クリーナユニット110は、フロントウィンドウ1fを洗浄可能な前ウィンドウウォッシャ(以降、前WWと称す)101と、リヤウィンドウ1bを洗浄可能な後ウィンドウウォッシャ(以降、後WWと称す)102を有する。クリーナユニット110は、右前LiDAR6frおよび右前カメラ6grを洗浄可能な右前センサクリーナ(以降、右前SCと称す)103と、左前LiDAR6flおよび左前カメラ6glを洗浄可能な左前センサクリーナ(以降、左前SCと称す)104を有する。クリーナユニット110は、右後LiDAR6brおよび右後カメラ6crを洗浄可能な右後センサクリーナ(以降、右後SCと称す)105と、左後LiDAR6blおよび左後カメラ6clを洗浄可能な左後センサクリーナ(以降、左後SCと称す)106を有する。クリーナユニット110は、右ヘッドランプ7rを洗浄可能な右ヘッドランプクリーナ(以降、右HCと称す)107と、左ヘッドランプ7lを洗浄可能な左ヘッドランプクリーナ(以降、左HCと称す)108を有する。各々のクリーナ101~108は一つ以上のノズルを有し、ノズルから洗浄液や空気等の洗浄媒体を対象物に向けて噴射する。
図3は、センサシステム100が備えるクリーナユニット110のブロック図である。クリーナユニット110は、クリーナ101~108の他に、タンク111、ポンプ112、クリーナ制御部113を有している。
前WW101、後WW102、右前SC103、左前SC104、右後SC105、左後SC106、右HC107、左HC108は、ポンプ112を介してタンク111に接続されている。ポンプ112はタンク111に貯留されている洗浄液を吸い込み、前WW101、後WW102、右前SC103、左前SC104、右後SC105、左後SC106、右HC107、左HC108に移送する。
各々のクリーナ101~108には、ノズルを開状態にさせて洗浄液を洗浄対象物に噴射させるアクチュエータ(図示省略)が設けられている。各々のクリーナ101~108に設けられたアクチュエータは、クリーナ制御部113に電気的に接続されている。また、ポンプ112もクリーナ制御部113に電気的に接続されている。クリーナ101~108、ポンプ112等の動作は、クリーナ制御部113によって制御される。また、クリーナ制御部113は、車両制御部3に電気的に接続されている。クリーナ制御部113で取得された情報と車両制御部3で取得された情報とは相互間で送受信される。なお、本実施形態では、車両制御部3とクリーナ制御部113は、別個の構成として設けられているが、車両制御部3とクリーナ制御部113は一体的に構成されてもよい。
図4は、本実施形態に係るセンサユニットを示す斜視図である。図5は、センサユニットを前方から観察した分解斜視図である。図6は、センサユニットのハウジング内に収納される収納部材の分解斜視図である。図7は、センサユニットを後方から観察した分解斜視図である。図8は、図7に示す各部材が組み合わされた状態を示す図である。
本実施形態に係るセンサユニットは、LiDARやカメラ等のセンサと、センサを洗浄するクリーナとが一体化されたユニットとして構成されている。以下に示す例では、センサシステム100に含まれる複数のセンサユニットのうち、車両1の左前部に設けられる左前センサユニット120flについて説明する。なお、図1に示すように、車両1は、車両1の左前部に設けられる左前センサユニット120flのほかに、車両1の右前部に設けられる右前センサユニット120fr、右後部に設けられる右後センサユニット120br、左後部に設けられる左後センサユニット120blを有している。右前センサユニット120fr、右後センサユニット120br、左後センサユニット120blについては、左前センサユニット120flと同様の構成であるため説明を省略する。
図4および図5に示すように、左前センサユニット120flは、ハウジング121と、左前LiDAR6flと、左前カメラ6glと、左前LiDARクリーナ104Aと、左前カメラクリーナ104Bと、を備えている。左前LiDARクリーナ104Aと左前カメラクリーナ104Bは、左前SC104を構成するクリーナである。
ハウジング121は、例えば、合成樹脂製であり、略箱型形状に形成されている。ハウジング121は、前ケース121Aと、前ケース121Aの後部に取り付けられる後ケース121Bと、前ケース121Aの左側部に取り付けられるプレート121Cと、を有している。
前ケース121Aの前面124(車両外観をなす意匠面)には上部開口部122と下部開口部123とが形成されている。上部開口部122は、前面124に設けられた凹部124aに形成されている。下部開口部123は、前面124に設けられた凹部124bに形成されている。上部開口部122は、下部開口部123よりも上方に形成されている。また、前ケース121Aの左側部には側部開口部127が形成されている。プレート121Cは、当該側部開口部127を覆うように前ケース121Aに取り付けられている。
上部開口部122は、ハウジング121内に収容される左前LiDAR6flの前面領域が含まれる大きさに形成されている。上部開口部122は、左右方向に長い横長の矩形状に形成されている。例えば、上部開口部122は、上方から下方に向かうにつれて左右方向の幅が狭くなる横長の台形状に形成されている。下部開口部123は、ハウジング121内に収容される左前カメラ6glの前面領域が含まれる大きさに形成されている。下部開口部123は、例えば円形状に形成されている。
前ケース121Aと後ケース121Bとプレート121Cとが組み合わされることで形成される空間内に左前LiDAR6flと左前カメラ6glとが収容されている。空間内において左前LiDAR6flは左前カメラ6glよりも上方に配置されている。
前ケース121Aの凹部124aに形成されている上部開口部122には、当該上部開口部122を隙間なく覆うように、透過カバー125が取り付けられている。透過カバー125は、例えば、透明または半透明の合成樹脂で形成されている。透過カバー125は、左右方向に長い横長の矩形状に形成されている。例えば、透過カバー125は、上方から下方に向かうにつれて左右方向の幅が狭くなる横長の台形状に形成されている。また、透過カバー125は、ハウジング121内に収容されている左前LiDAR6flの光軸に直交する面に対して傾斜する方向へ延びるように取り付けられている。透過カバー125は、上方から下方に向かうにつれてハウジング121の奥側(後側)に向かって入り込むように傾斜して取り付けられている。透過カバー125は、上部開口部122を覆うことによって、左前LiDAR6flの前面領域も覆うように取り付けられている。透過カバー125は、左前LiDAR6flの前面領域を覆うように取り付けられることで、左前センサユニット120flの左前LiDAR6flに対応する洗浄対象面の一例として構成されている。
前ケース121Aの凹部124bに形成されている下部開口部123には、当該下部開口部123を隙間なく覆うように、透過カバー126が取り付けられている。透過カバー126は、赤外光をカットする赤外光カットフィルタ機能を有している。透過カバー126は、例えば円形状に形成されている。透過カバー126は、下部開口部123を覆うことによって、ハウジング121内に収容されている左前カメラ6glの前面領域も覆うように取り付けられている。透過カバー126は、ハウジング121の車両外観を構成する前ケース121Aの前面124と左前カメラ6glの受光部との間に配置されている。透過カバー126は、左前カメラ6glの前面領域を覆うように取り付けられることで、左前センサユニット120flの左前カメラ6glに対応する洗浄対象面として構成されている。
左前LiDARクリーナ104Aは、左前LiDAR6flに対応する洗浄対象面、すなわち左前LiDAR6flの前面領域を覆う透過カバー125を洗浄媒体により洗浄可能なクリーナである。左前カメラクリーナ104Bは、左前カメラ6glに対応する洗浄対象面、すなわち左前カメラ6glの前面領域を覆う透過カバー126を洗浄媒体により洗浄可能なクリーナである。
図6から図8に示すように、ハウジング121内に収容される収納部材150には、左前LiDARクリーナ104Aと左前カメラクリーナ104Bの他に、ノズル保持部材151と、LiDAR保持部材152と、カメラ保持部材153などが含まれている。
左前LiDARクリーナ104Aは、左前LiDAR6flに対応する洗浄対象面である透過カバー125へ向けて空気を噴射可能なエアノズル131,132(第一ノズルの一例)と、洗浄液を噴射可能な液ノズル133(第二ノズルの一例)と、を有している。
エアノズル131は、空気を噴射するための噴射開口131aを有している。噴射開口131aには、エアノズル131から噴射される空気を拡散させるためのエアチップ134が取り付けられる。エアノズル132は、空気を噴射するための噴射開口132aを有している。噴射開口132aには、エアノズル132から噴射される空気を拡散させるためのエアチップ135が取り付けられる。
液ノズル133は、洗浄液を噴射するための噴射開口133aを有している。液ノズル133には、洗浄液を液ノズル133へ送り込むための連結部136が連結される。連結部136には、開口部136aが形成されている。開口部136aには、液ノズル133から噴射される洗浄液を拡散させるための液チップ137が取り付けられる。液チップ137は、連結部136の開口部136aに取り付けられ、当該連結部136が液ノズル133に連結されることにより、液ノズル133の噴射開口133a内に収納される。例えば、液ノズル133は、ノズル内部を流れる流体を互いに干渉させることにより流体の噴射方向を変化させるフルイディクス式ノズル(揺動噴射ノズル)であってもよい。
ノズル保持部材151は、エアノズル131,132および液ノズル133を保持する部材である。ノズル保持部材151には、エアノズル131を保持するための保持孔151aと、エアノズル132を保持するための保持孔151bと、液ノズル133を保持するための保持孔151cとが形成されている。ノズル保持部材151は、例えばビス止めによって前ケース121Aに固定される。前ケース121Aには、エアノズル131を保持するための保持溝161と、エアノズル132を保持するための保持溝162と、液ノズル133を保持するための保持溝163とが形成されている(図7参照)。
エアノズル131,132および液ノズル133は、保持孔151a,151b,151cと、保持溝161,162,163とにそれぞれ保持されることにより、各ノズルの噴射開口131a,132a,133aが所定の方向となるように位置決めされる。位置決めされたエアノズル131,132および液ノズル133は、ノズル保持部材151が前ケース121Aに固定されることにより、洗浄対象面である透過カバー125に対するエアノズル131,132からの空気の噴射方向と、液ノズル133からの洗浄液の噴射方向とが決定される。
左前カメラクリーナ104Bは、左前カメラ6glに対応する洗浄対象面である透過カバー126へ向けて空気を噴射可能なエアノズル141(第三ノズルの一例)を有している。エアノズル141は、空気を噴射するための噴射開口141aを有している。噴射開口141aには、エアノズル141から噴射される空気を拡散させるためのエアチップ142が取り付けられる。
なお、本実施形態では、左前カメラ6glに対応する洗浄対象面である透過カバー126に洗浄媒体を噴射するノズルとして、空気を噴射可能なエアノズルを設けているが、これに限られない。例えば、当該ノズルとして、洗浄液を噴射可能な液ノズル、あるいは洗浄液と空気とを選択的に噴射可能な気液ノズルを設けるようにしてもよい。
LiDAR保持部材152は、左前LiDAR6flを保持する部材である。LiDAR保持部材152は、例えばビス止めによって前ケース121Aに取り付けられる。LiDAR保持部材152が前ケース121Aに取り付けられることにより、左前LiDAR6flが後側からLiDAR保持部材152によって保持されるとともに、前ケース121Aに対して固定される。
カメラ保持部材153は、左前カメラ6glを保持する部材であり、上側保持部材153aと下側保持部材153bを有している。上側保持部材153aは、下側保持部材153bに例えばビス止めされることによって、左前カメラ6glを上側から保持する。下側保持部材153bは、上側保持部材153aが下側保持部材153bにビス止めされることによって、左前カメラ6glを下側から保持する。下側保持部材153bは、例えばビス止めによって前ケース121Aに取り付けられる。下側保持部材153bが前ケース121Aに取り付けられることにより、左前カメラ6glが前ケース121Aに対して固定される。
なお、図示を省略するが、左前LiDARクリーナ104Aと左前カメラクリーナ104Bは、クリーナ制御部113に電気的に接続されている。また、左前LiDARクリーナ104Aのエアノズル131,132は、ホースを介して、高圧空気を送出することが可能な高圧空気供給装置、あるいは空気を連続的に送風することが可能なエアブロアに接続されている。左前LiDARクリーナ104Aの液ノズル133は、ホースを介して、タンク111内の洗浄液を移送することが可能なポンプ112に接続されている。左前カメラクリーナ104Bのエアノズル141は、左前LiDARクリーナ104Aのエアノズル131,132と同様に、ホースを介して高圧空気供給装置あるいはエアブロアに接続されている。左前LiDARクリーナ104Aおよび左前カメラクリーナ104Bの動作は、クリーナ制御部113によって制御される。クリーナ制御部113は、例えば、センサ制御部115によって判定される洗浄対象面(透過カバー125,126)の汚れ状態情報に基づいて、左前LiDARクリーナ104Aと左前カメラクリーナ104Bを作動させ、当該洗浄対象面を洗浄する。
また、左前LiDAR6flと左前カメラ6glはセンサ制御部115に電気的に接続されている。左前LiDAR6flおよび左前カメラ6glの動作は、センサ制御部115によって制御される。センサ制御部115は、左前LiDAR6flによって取得される車両周囲の対象物に関する距離情報や方向情報等を左前LiDAR6flから受信する。また、センサ制御部115は、左前カメラ6glによって取得される車両周囲の対象物に関する画像情報や距離情報等を左前カメラ6glから受信する。センサ制御部115は、左前LiDAR6flおよび左前カメラ6glから受信した各情報に基づいて、左前LiDAR6flに対応する洗浄対象面である透過カバー125および左前カメラ6glに対応する洗浄対象面である透過カバー126の汚れ状態を判定する。センサ制御部115は、ハウジング121の外部に設けられてもよいし、あるいはハウジング121内部に設けられてもよい。
また、センサ制御部115はクリーナ制御部113に電気的に接続されている。センサ制御部115で取得された情報とクリーナ制御部113で取得された情報とは相互間で送受信される。また、センサ制御部115は車両制御部3に電気的に接続されている。センサ制御部115で取得された情報と車両制御部3で取得された情報とは相互間で送受信される。本実施形態では、クリーナ制御部113とセンサ制御部115と車両制御部3とは、別個の構成として設けられているが、クリーナ制御部113とセンサ制御部115と車両制御部3は一体的に構成されてもよい。また、これらの制御部のうち一部の制御部が一体的に構成されてもよい。
図9は、左前センサユニット120flの正面図である。図9に示すように、前ケース121Aの右上側部内には、左前LiDAR6flに対応する洗浄対象面である透過カバー125を洗浄するためのエアノズル131,132と液ノズル133とが設けられている。エアノズル131,132と液ノズル133は、横長矩形状である透過カバー125の右側短辺125aに沿って上下方向に並列されている。エアノズル131,132は、液ノズル133よりも上方に配置されている。図9に示す例では、エアノズル131が最上部に配置され、エアノズル132がエアノズル131の下側に配置され、液ノズル133がエアノズル132の下側である最下部に配置されている。なお、本実施形態では、エアノズルとして2個のエアノズル131と132を設けているが、エアノズルの数はこれに限られない。エアノズルの数は、例えば1個であってもよいし、3個以上であってもよい。また、液ノズル133の数は2個以上であってもよい。
エアノズル131,132と液ノズル133は、洗浄媒体(空気と洗浄液)を左前センサユニット120flの右側から左側へ向けて噴射するように設けられている。すなわち、エアノズル131,132と液ノズル133は、洗浄媒体を車両1の内側(中央側)から外側(側部側)へ向けて噴射するように設けられている。
エアノズル131は、エアノズル131から噴射される空気の噴射方向が、矢印Aで示されるような水平方向よりもやや下向きの方向となるように設けられている。エアノズル132は、エアノズル132から噴射される空気の噴射方向が、矢印Bで示されるような水平方向に平行な方向となるように設けられている。液ノズル133は、液ノズル133から噴射される洗浄液の噴射方向が、矢印Cで示されるような水平方向よりも上向きの方向となるように設けられている。
また、前ケース121Aの中央下部内には、左前カメラ6glに対応する洗浄対象面である透過カバー126を洗浄するためのエアノズル141が設けられている。エアノズル141は、円形状である透過カバー126の上側に配置されている。エアノズル141は、エアノズル141から噴射される空気の噴射方向が、矢印Dで示されるように、透過カバー126の略中央部となるように設けられている。なお、エアノズル141が配置される箇所は、透過カバー126の上側に限定されず、例えば透過カバー126の側部(左前カメラ6glの場合は右側)であってもよい。
以上説明したように本実施形態の左前センサユニット120flは、左前LiDAR6flと、左前LiDAR6flを収容するハウジング121と、ハウジング121に取り付けられて、左前LiDAR6flに対応する洗浄対象面(第一洗浄対象面の一例)である透過カバー125へ空気を噴射するエアノズル131,132と、透過カバー125へ洗浄液を噴射する液ノズル133と、を有する左前LiDARクリーナ104Aとを備えている。そして、エアノズル131,132は液ノズル133よりも上方に配置され、エアノズル131,132からの空気の噴射方向は水平方向に平行な方向または水平方向よりも下向きの方向であり、液ノズル133からの洗浄液の噴射方向は水平方向よりも上向きの方向である。ノズルから噴射される洗浄媒体が空気の場合と洗浄液の場合とでは、空気の場合の方が洗浄液の場合よりも走行風や重力などの影響を受けやすい。このため、例えば、洗浄媒体を所定のポイントに噴射させようとする場合、走行風や重力に反して洗浄液を下方から上方向に噴射させる方が、空気を下方から上方向に噴射させるよりも正確に噴射させることができる。したがって、上記構成のように、空気を噴射するエアノズル131,132を、洗浄液を噴射する液ノズル133よりも上方に配置し、エアノズル131,132から噴射される空気の噴射方向を水平または水平よりも下向きの方向として、液ノズル133から噴射される洗浄液の噴射方向を水平よりも上向きの方向とすることで、透過カバー125に対して空気を適切に噴射させることができる。よって、左前センサユニット120flによれば、左前センサユニット120flに搭載されている左前LiDAR6flに対して効率的な洗浄が可能である。
本実施形態において、左前センサユニット120flは、ハウジング121に取り付けられて、エアノズル131,132および液ノズル133を保持するノズル保持部材151をさらに備えている。そして、ノズル保持部材151は、エアノズル131,132からの空気の噴射方向と液ノズル133からの洗浄液の噴射方向とをそれぞれ位置決めするように構成されている。この構成によれば、エアノズル131,132および液ノズル133をノズル保持部材151の保持孔151a,151b,151cにそれぞれ挿通させ、当該ノズル保持部材151を前ケース121Aに固定することにより各ノズルを所定の向きに取り付けることができる。よって、ハウジング121に対する複数のノズルの容易な取り付けと容易な位置決めが可能である。
本実施形態において、ノズル保持部材151は、エアノズル131,132から噴射される空気と液ノズル133から噴射される洗浄液とが車両1の内側(中央側)から外側(側部側)へ向かって流れるように、ハウジング121に取り付けられている。この構成によれば、走行風に逆らわないような噴射方向に空気や洗浄液を噴射できるため、洗浄効果を向上させることができる。
本実施形態において、左前LiDAR6flに対応する洗浄対象面である透過カバー125は、横長矩形状に形成され、ノズル保持部材151は透過カバー125の右側短辺125aに沿ってエアノズル131,132および液ノズル133が配置されるようにハウジング121に取り付けられている。1つのノズルから洗浄媒体を噴射する場合、通常、上下方向よりも前方向の方が広い領域に洗浄媒体を噴射することが可能である。したがって、上記構成のように、横長矩形状の透過カバー125に対してエアノズル131,132および液ノズル133を短辺に沿って配置させることにより、これらのノズルを透過カバー125の長辺に沿って配置させる場合よりも、左前センサユニット120flに搭載するノズルの数を削減させることができる。
本実施形態においては、透過カバー125の右側短辺125aに沿って複数のエアノズル(例えばエアノズル131と132の2個)が並列されている。この構成によれば、複数のエアノズルによって透過カバー125を洗浄することができるので、空気による洗浄効果を高めることができる。このため、単数のエアノズルから噴射される空気だけでは洗浄しきれない汚れを複数のエアノズルから噴射される空気によって洗浄することが可能であり、且つ、液ノズル133による洗浄回数を低減することができ、洗浄液の節水を図ることができる。
本実施形態においては、左前LiDAR6flの下方に配置された左前カメラ6glをさらに備え、左前カメラクリーナ104Bは、左前カメラ6glに対応する洗浄対象面(第二洗浄対象面の一例)である透過カバー126に対して空気を噴射可能なエアノズル141を有している。この構成によれば、左前LiDAR6flと左前カメラ6glとが一体化された左前センサユニット120flに対して、効率的な洗浄を行うことができる。すなわち、左前カメラ6glの透過カバー126を洗浄する機能を備えることで、透過カバー126に付着した汚れを除去または透過カバー126への汚れの付着を防止することができる。これにより、左前カメラ6glによって取得される撮像画像へ及ぼす汚れの悪影響を抑制することができる。
本実施形態において、左前カメラ6glは、ハウジング121の車両外観をなす意匠面(前面124)と左前カメラ6glの受光部との間に配置されて、赤外光をカットする赤外光カットフィルタ機能を有する透過カバー126を有している。この構成によれば、一つのハウジング121内に左前LiDAR6flと左前カメラ6glとを近接して配置した場合であっても、左前LiDAR6flから出射された赤外光の反射光が左前カメラ6glの受光部に入ることを透過カバー126によって防止することができる。これにより、左前カメラ6glによって取得される撮像画像へ左前LiDAR6flからの赤外光の悪影響が及ぶのを抑制することができる。
本実施形態において、透過カバー126は、意匠面(前面124)に形成された凹部124bに配置されている。この構成によれば、左前カメラ6glの前面領域を覆う透過カバー126が奥に引っ込んだ状態で設けられているので、左前カメラ6glと左前LiDAR6flとが同じハウジング121内に近接して配置されていても、左前LiDAR6flから出射された赤外光が左前カメラ6glの受光部に直接入射することを防止することができる。
以上、本発明の実施形態について説明をしたが、本発明の技術的範囲が本実施形態の説明によって限定的に解釈されるべきではないのは言うまでもない。本実施形態は単なる一例であって、請求の範囲に記載された発明の範囲内において、様々な実施形態の変更が可能であることが当業者によって理解されるところである。本発明の技術的範囲は請求の範囲に記載された発明の範囲及びその均等の範囲に基づいて定められるべきである。
上述した実施形態では、左前センサユニット120flを自動運転可能な車両に搭載した例を説明したが、左前センサユニット120flは自動運転不可能な車両に搭載してもよい。
また、上述した実施形態では、左前センサユニット120flにおいて左前LiDAR6flを上方に配置させ、左前カメラ6glを左前LiDAR6flの下方に配置させているが、この例に限られない。例えば、左前カメラ6glを上方に配置させ、左前LiDAR6flを左前カメラ6glの下方に配置させるようにしてもよい。
また、左前LiDAR6flの液ノズル133から噴射される洗浄液は、水、あるいは洗剤を含む。フロント・リヤウィンドウ1f,1b、ヘッドランプ7l,7r、LiDAR6fl,6fr,6bl,6br、カメラ6gl,6gr,6cl,6crのそれぞれに噴射される洗浄媒体は、相異なっていてもよいし、同じでもよい。
本出願は、2019年12月27日出願の日本特許出願2019-238962号、2019年12月27日出願の日本特許出願2019-238963号及び2019年12月27日出願の日本特許出願2019-238964号に基づくものであり、その内容はここに参照として取り込まれる。
Claims (13)
- 車両に搭載されるセンサユニットであって、
LiDARと、
前記LiDARを収容するハウジングと、
前記ハウジングに取り付けられて、前記LiDARに対応する第一洗浄対象面へ空気を噴射する第一ノズルと、前記第一洗浄対象面へ洗浄液を噴射する第二ノズルと、を有するクリーナと、を備え、
前記第一ノズルは前記第二ノズルよりも上方に配置され、
前記第一ノズルからの前記空気の噴射方向は水平方向に平行な方向または前記水平方向よりも下向きの方向であり、
前記第二ノズルからの前記洗浄液の噴射方向は前記水平方向よりも上向きの方向である、センサユニット。 - 前記第一ノズルおよび前記第二ノズルは、前記車両の内側から外側へ向かって前記空気および前記洗浄液を噴射するように、配置されている、請求項1に記載のセンサユニット。
- 前記第一洗浄対象面は、横長矩形であって、前記第一洗浄対象面の短辺に沿って前記第一ノズルおよび前記第二ノズルが配置されている、請求項1または2に記載のセンサユニット。
- 車両に搭載されるセンサユニットであって、
LiDARと、
前記LiDARを収容するハウジングと、
前記ハウジングに取り付けられて、前記LiDARに対応する第一洗浄対象面へ空気を噴射する第一ノズルと、前記第一洗浄対象面へ洗浄液を噴射する第二ノズルと、を有するクリーナと、
前記ハウジングに取り付けられて、前記第一ノズルおよび前記第二ノズルを保持する保持部材と、
を備え、
前記保持部材は、前記第一ノズルからの前記空気の噴射方向と前記第二ノズルからの前記洗浄液の噴射方向とをそれぞれ位置決めするように構成されている、センサユニット。 - 前記第一ノズルは、前記第二ノズルよりも上方に配置されるように、前記保持部材に取り付けられている、請求項4に記載のセンサユニット。
- 前記第一ノズルは、前記空気の噴射方向が水平方向に平行な方向または前記水平方向よりも下向きの方向となるように、前記保持部材に取り付けられており、
前記第二ノズルは、前記洗浄液の噴射方向が前記水平方向よりも上向きの方向となるように、前記保持部材に取り付けられている、請求項5に記載のセンサユニット。 - 前記保持部材は、前記第一ノズルから噴射される前記空気と前記第二ノズルから噴射される前記洗浄液とが前記車両の内側から外側へ向かって流れるように、前記ハウジングに取り付けられている、請求項4から6のいずれか一項に記載のセンサユニット。
- 前記第一洗浄対象面は、横長矩形であって、
前記保持部材は、前記第一洗浄対象面の短辺に沿って前記第一ノズルおよび前記第二ノズルが配置されるように、前記ハウジングに取り付けられている、請求項4から7のいずれか一項に記載のセンサユニット。 - 前記クリーナは、前記短辺に沿って並列された複数の前記第一ノズルを含む、請求項3または8に記載のセンサユニット。
- 前記LiDARの下方に配置されたカメラをさらに備え、
前記クリーナは、前記カメラに対応する第二洗浄対象面に対して前記空気および前記洗浄液の少なくとも一方を噴射可能な第三ノズルをさらに有している、請求項1から9のいずれか一項に記載のセンサユニット。 - 車両に搭載されるセンサユニットであって、
LiDARと、
受光部を備えたカメラと、
前記LiDARおよび前記カメラを収容するハウジングと、
を備え、
前記カメラは、前記ハウジングの車両外観をなす意匠面と前記受光部との間に配置されて、赤外光をカットする赤外光カットフィルタ機能を有する透過カバーを有している、センサユニット。 - 前記透過カバーは、前記意匠面に形成された凹部に配置されている、請求項11に記載のセンサユニット。
- 前記透過カバーに洗浄媒体を噴射するノズルを有するクリーナをさらに備えている、請求項11または12に記載のセンサユニット。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP20906313.0A EP4082840A4 (en) | 2019-12-27 | 2020-11-30 | SENSOR UNIT |
| CN202080090606.2A CN114901525A (zh) | 2019-12-27 | 2020-11-30 | 传感器单元 |
| US17/788,435 US20230031726A1 (en) | 2019-12-27 | 2020-11-30 | Sensor unit |
| JP2021567107A JP7486525B2 (ja) | 2019-12-27 | 2020-11-30 | センサユニット |
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019-238963 | 2019-12-27 | ||
| JP2019-238964 | 2019-12-27 | ||
| JP2019238963 | 2019-12-27 | ||
| JP2019-238962 | 2019-12-27 | ||
| JP2019238964 | 2019-12-27 | ||
| JP2019238962 | 2019-12-27 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021131520A1 true WO2021131520A1 (ja) | 2021-07-01 |
Family
ID=76573890
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/044548 WO2021131520A1 (ja) | 2019-12-27 | 2020-11-30 | センサユニット |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20230031726A1 (ja) |
| EP (1) | EP4082840A4 (ja) |
| JP (1) | JP7486525B2 (ja) |
| CN (1) | CN114901525A (ja) |
| WO (1) | WO2021131520A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20230135961A1 (en) * | 2021-11-03 | 2023-05-04 | Ford Global Technologies, Llc | Sensor assembly for a vehicle |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11921208B2 (en) * | 2020-08-27 | 2024-03-05 | Ford Global Technologies, Llc | Sensor apparatus with cleaning |
| KR20220030013A (ko) * | 2020-09-02 | 2022-03-10 | 현대모비스 주식회사 | 차량용 후방카메라 및 그 제어방법 |
| US20220135005A1 (en) * | 2020-10-29 | 2022-05-05 | Argo AI, LLC | Method and system for diverting ram air to vehicle sensors |
| US12099147B2 (en) * | 2022-05-12 | 2024-09-24 | GM Global Technology Operations LLC | Surface cleaning system to clean lidar sensor of an autonomous vehicle |
Citations (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030155001A1 (en) * | 2000-03-11 | 2003-08-21 | Dieter Hoetzer | Device for keeping clean optical elements on motor vehicle clean, in particular covers for sensors or cameras |
| JP2004182080A (ja) * | 2002-12-03 | 2004-07-02 | Mitsubishi Electric Corp | 赤外線カメラ搭載車両および赤外線カメラシステム |
| JP2010258636A (ja) * | 2009-04-23 | 2010-11-11 | Alps Electric Co Ltd | 撮像素子ユニット |
| US20120026325A1 (en) * | 2010-07-29 | 2012-02-02 | Logitech Europe S.A. | Optimized movable ir filter in cameras |
| WO2018051909A1 (ja) | 2016-09-15 | 2018-03-22 | 株式会社小糸製作所 | センサシステム |
| WO2019044399A1 (ja) * | 2017-08-30 | 2019-03-07 | 株式会社小糸製作所 | 車両用エアクリーナ |
| WO2019059083A1 (ja) * | 2017-09-20 | 2019-03-28 | 株式会社小糸製作所 | 車両用センサシステム、当該車両用センサシステムを備えた車両、および車両 |
| WO2019073975A1 (ja) * | 2017-10-10 | 2019-04-18 | 株式会社デンソー | 車両用洗浄システム |
| CN208834323U (zh) * | 2018-09-30 | 2019-05-07 | 南昌欧菲生物识别技术有限公司 | 3d识别模组、3d识别装置及智能终端 |
| WO2019116607A1 (ja) * | 2017-12-12 | 2019-06-20 | 株式会社デンソー | 車両用清掃システム |
| US20190202411A1 (en) * | 2017-12-30 | 2019-07-04 | Dlhbowles, Inc. | Automotive image sensor surface washing and drying system and method |
| US20190202410A1 (en) * | 2017-12-30 | 2019-07-04 | Dlhbowles, Inc. | Automotive image sensor surface washing and drying system |
| WO2019176607A1 (ja) * | 2018-03-12 | 2019-09-19 | 株式会社小糸製作所 | 車両用クリーナシステムおよび車両用システム |
| WO2019189072A1 (ja) * | 2018-03-26 | 2019-10-03 | Jsr株式会社 | 光学フィルターおよびその用途 |
| WO2019187241A1 (ja) * | 2018-03-28 | 2019-10-03 | 株式会社デンソー | 車載センサ洗浄装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5056919B2 (ja) * | 2009-09-29 | 2012-10-24 | 株式会社デンソー | 車載光学センサカバー及び車載光学センサ装置 |
| US10703342B2 (en) * | 2017-09-14 | 2020-07-07 | Ford Global Technologies, Llc | Sensor cleaning |
| US10549723B2 (en) * | 2018-05-04 | 2020-02-04 | Ford Global Technologies, Llc | Vehicle object-detection sensor assembly |
-
2020
- 2020-11-30 US US17/788,435 patent/US20230031726A1/en active Pending
- 2020-11-30 EP EP20906313.0A patent/EP4082840A4/en active Pending
- 2020-11-30 WO PCT/JP2020/044548 patent/WO2021131520A1/ja unknown
- 2020-11-30 JP JP2021567107A patent/JP7486525B2/ja active Active
- 2020-11-30 CN CN202080090606.2A patent/CN114901525A/zh active Pending
Patent Citations (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030155001A1 (en) * | 2000-03-11 | 2003-08-21 | Dieter Hoetzer | Device for keeping clean optical elements on motor vehicle clean, in particular covers for sensors or cameras |
| JP2004182080A (ja) * | 2002-12-03 | 2004-07-02 | Mitsubishi Electric Corp | 赤外線カメラ搭載車両および赤外線カメラシステム |
| JP2010258636A (ja) * | 2009-04-23 | 2010-11-11 | Alps Electric Co Ltd | 撮像素子ユニット |
| US20120026325A1 (en) * | 2010-07-29 | 2012-02-02 | Logitech Europe S.A. | Optimized movable ir filter in cameras |
| WO2018051909A1 (ja) | 2016-09-15 | 2018-03-22 | 株式会社小糸製作所 | センサシステム |
| WO2019044399A1 (ja) * | 2017-08-30 | 2019-03-07 | 株式会社小糸製作所 | 車両用エアクリーナ |
| WO2019059083A1 (ja) * | 2017-09-20 | 2019-03-28 | 株式会社小糸製作所 | 車両用センサシステム、当該車両用センサシステムを備えた車両、および車両 |
| WO2019073975A1 (ja) * | 2017-10-10 | 2019-04-18 | 株式会社デンソー | 車両用洗浄システム |
| WO2019116607A1 (ja) * | 2017-12-12 | 2019-06-20 | 株式会社デンソー | 車両用清掃システム |
| US20190202411A1 (en) * | 2017-12-30 | 2019-07-04 | Dlhbowles, Inc. | Automotive image sensor surface washing and drying system and method |
| US20190202410A1 (en) * | 2017-12-30 | 2019-07-04 | Dlhbowles, Inc. | Automotive image sensor surface washing and drying system |
| WO2019176607A1 (ja) * | 2018-03-12 | 2019-09-19 | 株式会社小糸製作所 | 車両用クリーナシステムおよび車両用システム |
| WO2019189072A1 (ja) * | 2018-03-26 | 2019-10-03 | Jsr株式会社 | 光学フィルターおよびその用途 |
| WO2019187241A1 (ja) * | 2018-03-28 | 2019-10-03 | 株式会社デンソー | 車載センサ洗浄装置 |
| CN208834323U (zh) * | 2018-09-30 | 2019-05-07 | 南昌欧菲生物识别技术有限公司 | 3d识别模组、3d识别装置及智能终端 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4082840A4 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20230135961A1 (en) * | 2021-11-03 | 2023-05-04 | Ford Global Technologies, Llc | Sensor assembly for a vehicle |
| US11827189B2 (en) | 2021-11-03 | 2023-11-28 | Ford Global Technologies, Llc | Sensor assembly for a vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2021131520A1 (ja) | 2021-07-01 |
| US20230031726A1 (en) | 2023-02-02 |
| EP4082840A1 (en) | 2022-11-02 |
| CN114901525A (zh) | 2022-08-12 |
| JP7486525B2 (ja) | 2024-05-17 |
| EP4082840A4 (en) | 2023-09-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2021131520A1 (ja) | センサユニット | |
| JP7438173B2 (ja) | 車両用クリーナシステムおよび車両用クリーナシステムを備える車両 | |
| JP7273711B2 (ja) | 車両用クリーナシステムおよび車両用クリーナシステムを備える車両 | |
| JP7165659B2 (ja) | 車両用クリーナシステムおよび車両用クリーナ制御装置 | |
| JP7223697B2 (ja) | 車両用センサシステム、当該車両用センサシステムを備えた車両、および車両 | |
| WO2021079911A1 (ja) | センサシステム及びセンサユニット | |
| WO2020255781A1 (ja) | 車両用クリーナシステム及び車両用クリーナ付きセンサシステム | |
| WO2020255780A1 (ja) | 車両用エアカーテン装置、車両用クリーナシステム、車両用エアカーテンシステム | |
| US11899201B2 (en) | Head-up display for vehicles and head-up display system for vehicles | |
| JPWO2019176607A1 (ja) | 車両用クリーナシステムおよび車両用システム | |
| JP2020094624A (ja) | 流路切替ボックスおよび車両用クリーナシステム | |
| JP7125849B2 (ja) | 車両システム | |
| JP2020078998A (ja) | 車両用クリーナシステム | |
| WO2023048129A1 (ja) | センサシステム及びクリーナ | |
| WO2023074614A1 (ja) | クリーナ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20906313 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021567107 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2020906313 Country of ref document: EP Effective date: 20220727 |