WO2021002286A1 - 分光測定器 - Google Patents
分光測定器 Download PDFInfo
- Publication number
- WO2021002286A1 WO2021002286A1 PCT/JP2020/025177 JP2020025177W WO2021002286A1 WO 2021002286 A1 WO2021002286 A1 WO 2021002286A1 JP 2020025177 W JP2020025177 W JP 2020025177W WO 2021002286 A1 WO2021002286 A1 WO 2021002286A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- sensor
- light
- auxiliary sensor
- auxiliary
- output value
- Prior art date
Links
- 230000003287 optical effect Effects 0.000 claims abstract description 118
- 230000004907 flux Effects 0.000 claims abstract description 24
- 230000035945 sensitivity Effects 0.000 claims description 28
- 230000002123 temporal effect Effects 0.000 claims description 6
- 230000000007 visual effect Effects 0.000 claims description 2
- 238000005259 measurement Methods 0.000 description 125
- 238000002834 transmittance Methods 0.000 description 47
- 238000000034 method Methods 0.000 description 44
- 230000003595 spectral effect Effects 0.000 description 29
- 230000006866 deterioration Effects 0.000 description 15
- 230000007613 environmental effect Effects 0.000 description 14
- 239000000835 fiber Substances 0.000 description 10
- 238000009825 accumulation Methods 0.000 description 8
- 238000006243 chemical reaction Methods 0.000 description 4
- 239000004973 liquid crystal related substance Substances 0.000 description 3
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 2
- 230000001276 controlling effect Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 229910052710 silicon Inorganic materials 0.000 description 2
- 239000010703 silicon Substances 0.000 description 2
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 1
- 238000010521 absorption reaction Methods 0.000 description 1
- 230000032683 aging Effects 0.000 description 1
- 229910052804 chromium Inorganic materials 0.000 description 1
- 239000011651 chromium Substances 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000003647 oxidation Effects 0.000 description 1
- 238000007254 oxidation reaction Methods 0.000 description 1
- 210000001747 pupil Anatomy 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 238000004611 spectroscopical analysis Methods 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 238000007740 vapor deposition Methods 0.000 description 1
Images


















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/17—Systems in which incident light is modified in accordance with the properties of the material investigated
- G01N21/25—Colour; Spectral properties, i.e. comparison of effect of material on the light at two or more different wavelengths or wavelength bands
- G01N21/31—Investigating relative effect of material at wavelengths characteristic of specific elements or molecules, e.g. atomic absorption spectrometry
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J3/00—Spectrometry; Spectrophotometry; Monochromators; Measuring colours
- G01J3/02—Details
- G01J3/027—Control of working procedures of a spectrometer; Failure detection; Bandwidth calculation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J3/00—Spectrometry; Spectrophotometry; Monochromators; Measuring colours
- G01J3/02—Details
- G01J3/0205—Optical elements not provided otherwise, e.g. optical manifolds, diffusers, windows
- G01J3/0213—Optical elements not provided otherwise, e.g. optical manifolds, diffusers, windows using attenuators
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J3/00—Spectrometry; Spectrophotometry; Monochromators; Measuring colours
- G01J3/02—Details
- G01J3/0205—Optical elements not provided otherwise, e.g. optical manifolds, diffusers, windows
- G01J3/0229—Optical elements not provided otherwise, e.g. optical manifolds, diffusers, windows using masks, aperture plates, spatial light modulators or spatial filters, e.g. reflective filters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J3/00—Spectrometry; Spectrophotometry; Monochromators; Measuring colours
- G01J3/02—Details
- G01J3/0205—Optical elements not provided otherwise, e.g. optical manifolds, diffusers, windows
- G01J3/0248—Optical elements not provided otherwise, e.g. optical manifolds, diffusers, windows using a sighting port, e.g. camera or human eye
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J3/00—Spectrometry; Spectrophotometry; Monochromators; Measuring colours
- G01J3/02—Details
- G01J3/0297—Constructional arrangements for removing other types of optical noise or for performing calibration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J3/00—Spectrometry; Spectrophotometry; Monochromators; Measuring colours
- G01J3/12—Generating the spectrum; Monochromators
- G01J3/18—Generating the spectrum; Monochromators using diffraction elements, e.g. grating
Definitions
- the present invention relates to a spectroscopic measuring instrument used for measuring the brightness and chromaticity of a light source, the spectral reflectance of an object, the color value, and the like.
- the light to be measured from the measurement area such as a light source is guided to the incident slit as the incident portion through the optical system such as the objective lens, the aperture aperture, and the condenser relay lens, and is guided from the incident slit.
- the optical system such as the objective lens, the aperture aperture, and the condenser relay lens
- a device having a configuration in which an incident light to be measured is diffracted and separated by a diffraction means such as a diffraction grating and the diffracted light is received by a light receiving sensor to obtain a measured value has been conventionally known.
- the accuracy of the light receiving sensor itself may change due to changes in the measurement environment or deterioration over time.
- optical system components may be placed in the path from the incident part such as the incident slit or bundle fiber until the light to be measured received by the light receiving sensor is received by the light receiving sensor.
- the optical system components will be described as follows.
- Optical system components include dimming members such as ND filters, liquid crystal shutters, and diffusers, and optics such as infrared light cut filters and ultraviolet light cut filters that cut wavelength bands other than the measurement wavelength range (for example, 380 to 780 nm).
- the filter can be mentioned.
- the ND filter includes an ND filter in which a metal film (for example, chromium) is vapor-deposited on a glass substrate, an ND filter having an interference film, a color absorption filter, and the like.
- the above-mentioned dimming member is used to enable measurement with a wide dynamic range. That is, when the spectroscopic measuring instrument is a luminance meter and the dynamic range of the light receiving sensor is narrower than the measured luminance range of the luminance meter, the dimming member is automatically or manually inserted into the optical path or the optical path according to the brightness of the object to be measured. By retracting from the light receiving intensity, the light receiving intensity is controlled, which enables measurement with a wide dynamic range.
- the dynamic range is about 5 million times, so without a neutral density member.
- 0.0005 ⁇ 250cd / m 2 of performed measurements of brightness range was measured in place one by dimming member e.g. transmittance of 5% ND filter in the light path ⁇ 5000 cd / m 2, the transmittance 5%
- the dimming member may not be able to perform highly accurate measurements due to changes in transmittance due to the operating environment temperature and deterioration over time due to storage in a high temperature / high humidity environment or light exposure. For example, if the dimming member having a transmittance of 5% changes by 0.1% in the absolute value of the transmittance, the light receiving data will have an error of 2% in the relative value.
- the ND filter of the metal vapor deposition film has the characteristic that the transmittance increases over time due to the oxidation of the film.
- the ND filter of the interference film has a transmittance dependence on the optical path due to the inclination, and the filter inclination changes depending on the reproducibility of the advance / retreat drive to the optical path and the attitude direction of the measuring instrument, and therefore the transmittance fluctuation is large.
- Absorption-type color filters, liquid crystal shutters, diffusers, etc. have a large change in transmittance depending on the ambient temperature, and further, the change in transmittance differs for each wavelength, which also affects the chromaticity value.
- the dimming member but also the optical filter is likely to change the transmittance due to the environmental temperature, and it may not be possible to perform highly accurate measurement.
- the optical system component when the accuracy of the light receiving sensor itself changes due to changes in the measurement environment or deterioration over time, there is a problem that highly accurate measurement cannot be performed.
- the optical system component when the optical system component is interposed in the path from the incident part such as the incident slit or the bundle fiber until the light to be measured received by the light receiving sensor is received by the light receiving sensor, the optical system component may be affected by environmental conditions or deterioration over time. If the transmittance changes, there is also a problem that highly accurate measurement cannot be performed.
- Patent Document 2 as a spectroscopic measuring instrument that effectively utilizes the 0th-order diffracted light, a diffracting means for dispersing the light to be measured, a first photoelectric conversion element for receiving the 0th-order diffracted light from the diffracting means, and a diffracting means
- a spectroscopic measuring instrument that controls the integration time at the second photoelectric conversion element based on the light receiving output of the second photoelectric conversion element that receives the higher-order diffracted light and the 0th-order diffracted light photoelectrically converted by the first photoelectric conversion element. It is disclosed.
- the spectroscopic measuring instrument described in Patent Document 2 controls the integration time in the light receiving sensor based on the light receiving output of the 0th-order diffracted light, and does not correct the output value of the light receiving sensor. Therefore, when the accuracy of the light receiving sensor itself changes, or when the light to be measured incident from an incident part such as an incident slit or bundle fiber is received by the light receiving sensor, the transmittance of the optical system component interposed in the path until the light is received by the light receiving sensor.
- the present invention has been made in view of such a technical background, and when the accuracy of the light receiving sensor itself changes, or when the light to be measured incident from an incident portion such as an incident slit or a bundle fiber is received by the light receiving sensor.
- An object of the present invention is to provide a spectroscopic measuring instrument capable of performing highly accurate measurement even when the transmittance of an optical system component interposed in a path until light is received changes due to environmental conditions, deterioration over time, or the like. To do.
- a diffusing means that diffracts the light to be measured incident from the incident portion, a main sensor that receives the light to be measured diffracted by the diffracting means, and a light beam incident from the incident portion that reaches the main sensor.
- Spectral measurement including one or more auxiliary sensors arranged in an optical path of a light beam that does not receive the light beam, and a correction means for correcting the output value of the main sensor based on the output value of the auxiliary sensor. vessel.
- the correction means corrects the output value of the main sensor so that the light receiving intensity value calculated from the output value of the main sensor becomes the same as the light receiving intensity value calculated from the output value of the auxiliary sensor.
- the spectroscopic measuring instrument according to item 1 or 2 above which includes a light receiving light amount adjusting member for adjusting the light receiving light amount of the main sensor.
- the received light amount adjusting member is a dimming member that is arranged so as to be inserted and retracted with respect to the optical path of the light to be measured.
- the auxiliary sensor is arranged in front of the received light amount adjusting member, and the correction means simultaneously acquires the output values of the main sensor and the auxiliary sensor and corrects the output value of the main sensor. Or the spectroscopic measuring instrument according to 4.
- a first auxiliary sensor is arranged behind the dimming member, and the correction means acquires the output value of the main sensor in the state where the dimming member is inserted into the optical path, and is in a retracted state from the optical path.
- the spectroscopic measuring instrument according to item 4 above wherein the output value of the first auxiliary sensor is acquired and the output value of the main sensor is corrected.
- a second auxiliary sensor is arranged in front of the dimming member, and the correction means performs timings when acquiring the output value of the main sensor and when acquiring the output value of the first auxiliary sensor.
- a first auxiliary sensor is arranged in front of the received light amount adjusting member, and a second auxiliary sensor is arranged in the rear, and the correction means includes the main sensor, the first auxiliary sensor, and the second auxiliary sensor.
- the output value of the first auxiliary sensor and the second auxiliary sensor are simultaneously acquired, and the output value of the main sensor is corrected based on the rate of change from the reference value of the output value ratio of the first auxiliary sensor and the second auxiliary sensor.
- a first auxiliary sensor is arranged behind the dimming member, and the correction means receives the output value of the main sensor and the output of the first auxiliary sensor in a state where the dimming member is inserted into the optical path.
- the values are acquired at the same time, the output values of the first auxiliary sensor are acquired in the retracted state of the dimming member from the optical path, and based on the ratio of the acquired output values of the first auxiliary sensors,
- the spectroscopic measuring instrument according to item 4 above which corrects the output value of the main sensor.
- a second auxiliary sensor is arranged in front of the dimming member, and the correction means obtains the output value of the second auxiliary sensor at the same timing as the acquisition timing of the output value of the first auxiliary sensor. It is acquired twice, the temporal light intensity change rate is calculated from the ratio of the two output values of the acquired second auxiliary sensor, and the temporal light intensity change is corrected based on the calculated light intensity change rate.
- the spectroscopic measuring instrument according to item 9 above.
- (11) The spectrophotometer according to any one of items 1 to 10 above, wherein the auxiliary sensor receives a light flux that is not applied to the diffraction grating among the light flux incident from the incident portion.
- the auxiliary sensor is a plurality of auxiliary sensors having different light intensity ranges that can be received.
- the auxiliary sensor includes an optical filter having a light receiving sensitivity of standard visual sensitivity.
- the main sensor receives the light to be measured that is incident from the incident portion and diffracted by the diffracting means.
- the main sensor is provided based on the output value of the auxiliary sensor. The output value is corrected. Therefore, when the accuracy of the main sensor itself, which is the light receiving sensor, changes, or when the optical system component is interposed in the path of the light to be measured from the incident part such as the incident slit or the bundle fiber to the light received by the light receiving sensor.
- the transmittance changes due to environmental conditions, deterioration over time, etc., it is possible to compensate for changes in the accuracy of the main sensor and changes in the transmittance of optical system components, and it is possible to perform highly accurate measurements. .. Moreover, since the auxiliary sensor is arranged in the optical path of the luminous flux that does not reach the main sensor, the output value of the main sensor can be corrected without affecting the measurement by the main sensor.
- the output value of the main sensor is corrected so that the light receiving intensity value calculated from the output value of the main sensor becomes the same as the light receiving intensity value calculated from the output value of the auxiliary sensor. Therefore, it is possible to reliably compensate for changes in the accuracy of the main sensor and changes in the transmittance of the optical system components.
- the output value of the main sensor is based on the output value of the main sensor. Since the output value is corrected, highly accurate measurement can be performed.
- the timing of acquiring the output value of the main sensor and the timing of acquiring the output value of the first auxiliary sensor are different. It is possible to correct the change in the amount of light over time to perform more accurate measurement.
- the timing of acquiring the output value of the main sensor and the timing of acquiring the output value of the first auxiliary sensor are different. It is possible to correct the change in the amount of light over time to perform more accurate measurement.
- the output value of the main sensor can be corrected by the auxiliary sensor at the position where the light flux that is not applied to the diffraction grating is received among the light flux passing through the incident slit.
- the output value of the main sensor can be corrected based on the output of the auxiliary sensor that has received the 0th diffraction order light.
- auxiliary sensors are a plurality of auxiliary sensors having different light intensity ranges that can be received, a dynamic range can be secured with respect to the measuring instrument degree range. ..
- the amount of light received by the auxiliary sensor can be controlled by the aperture diaphragm.
- the amount of light received by the auxiliary sensor can be controlled by an optical filter.
- the calculation for calculating the brightness of the object to be measured based on the output value of the auxiliary sensor becomes simple.
- FIG. 1 It is a figure which shows an example of the basic structure of the spectroscopic measuring instrument which concerns on one Embodiment of this invention. It is a figure which shows the detailed structure of the spectroscopic part in the spectroscopic measuring instrument of FIG. It is a schematic view when the diffraction grating is seen from the front side of the diaphragm in the spectroscopic part of FIG. It is a top view of the spectroscopic part of FIG. It is a figure which shows the arrangement example of the auxiliary sensor at the time of the correction processing which concerns on 1st Embodiment. It is a figure which shows the flowchart of the correction process which concerns on 1st Embodiment.
- FIG. 1 is a diagram showing a basic configuration of a spectroluminometer, which is a spectrophotometer according to an embodiment of the present invention.
- the spectroscopic measuring instrument 1 includes a light receiving optical system 100, an observation optical system 200, a measurement optical system 300, a processing circuit 600, and a correction unit 700, and the measurement optical system 300 further includes a correction unit 700. It includes a light guide unit 400 and a spectroscopic unit 500.
- the light receiving optical system 100 receives the light beam 3 from the object 2 to be measured, which is a light source, and guides the light beam 3 to the light guide unit 400 and the observation optical system 200 of the measurement optical system 300, and the light beam from the object 2 to be measured.
- An objective lens 101 that collects light 3 an aperture diaphragm 102 for regulating the amount of measured light arranged behind the objective lens 101 (front in the traveling direction of the light beam 3), and an aperture mirror further arranged behind the aperture diaphragm 102. It is equipped with 103.
- the aperture mirror 103 is a mirror that is arranged in the incident optical path of the light flux 3 to the light guide unit 400 and has an aperture through which the light flux 3 focused by the objective lens 101 passes.
- the light beam from the objective lens 101 passes through the aperture of the aperture mirror 103 and goes straight to the light guide portion 400 in the subsequent stage, but the light beam outside the light measurement area is the aperture. It is reflected by the mirror 103 and guided to the pupil of the user through a lens group including the reflection mirror 201 and the observation relay lens 202 in the observation optical system 200.
- the user visually recognizes the object 2 to be measured and the index circle (the area that is not reflected by the aperture mirror and appears to be black to the user) from the observation optical system 200, and performs measurement positioning and focusing. Focusing focuses on the aperture mirror position by moving all or part of the lens group of the objective lens 101.
- the aperture angle (F number) of the measurement light does not change even if the aperture diaphragm 102 is focused.
- the hole size of the aperture mirror 103 may be changed manually or automatically.
- the measurement angle (measurement size) can be changed by changing the hole size.
- the light guide unit 400 in the measurement optical system 300 guides the light beam passing through the aperture of the aperture mirror 103 to the condensing lens 401 and the light beam passing through the condensing lens 401 to the incident slit 501 of the spectroscopic unit 500.
- a shining bundle fiber 402 is provided, and in this embodiment, the outlet of the bundle fiber 402 and the incident slit 501 are shared as an incident portion.
- the bundle fiber 402 and the incident slit 501 may be at least one of them.
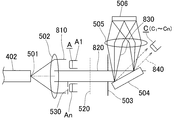
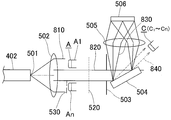
- the spectroscopic unit 500 in the measurement optical system 300 has a collimator lens 502 that makes the light beam incident from the incident slit 501 substantially parallel light, and a rectangular opening 503a arranged behind the parallel light from the collimator lens 502.
- the aperture 503 regulates the amount of parallel light from the collimator lens 502 according to the size of the diffraction grating 504, and the imaging lens 505 images the light rays dispersed in wavelength by the diffraction grating 504 on the main sensor 506. It is what makes you.
- the diaphragm 503 is highly reliable because it is resistant to changes in the environment and changes over time, and is not dependent on the wavelength of light or the inclination (angle of light incident).
- the main sensor 506 includes, but is not limited to, a line sensor, and can receive light in a wavelength range of, for example, 380 to 780 nm.
- an optical filter which is one of the received light amount adjusting members as an optical system component, for example, an infrared light cut filter 510 for cutting infrared light and an infrared light cut filter 510 behind the infrared light cut filter 510 are also received light.
- a dimming member 520 which is one of the light amount adjusting members, is arranged. Only one of the infrared light cut filter 510 and the dimming member 520 may be arranged, or both may not be arranged. Further, the number of dimming members 520 may be one, or a plurality of dimming members 520 may be arranged in the optical path at the same time.
- the dimming member 520 is used to enable measurement with a wide dynamic range, as described in the background technology, and is composed of an ND filter, a liquid crystal shutter, a diffuser, and the like.
- the dimming member 520 is driven by the drive unit 521 so as to be insertable and retractable into the optical path, and is inserted into the optical path only when necessary to allow the light to be measured from the collimator lens 502 to pass through. It has become.
- the spectroscopic unit 500 is provided with one or a plurality of auxiliary sensors A, B, and C composed of light receiving sensors.
- one or a plurality of sensors are collectively referred to as an auxiliary sensor A, an auxiliary sensor B, and an auxiliary sensor C according to the arrangement position of the auxiliary sensors.
- auxiliary sensors A1 to An When it is necessary to refer to a plurality of auxiliary sensors, they are described as auxiliary sensors A1 to An, auxiliary sensors B1 to Bn, and auxiliary sensors C1 to Cn.
- auxiliary sensors A, B, and C highly reliable sensors such as silicon photodiodes (SPDs) that are resistant to changes in environmental temperature and aging are used.
- SPDs silicon photodiodes
- the auxiliary sensors A, B, and C are for correcting the output value of the main sensor 506 based on the output value of the auxiliary sensor, and are incident on the spectroscopic unit 500 from the light guide unit 400 and received by the main sensor 506.
- the light has the same conditions as the light to be measured, but is arranged in the optical path of the luminous flux that does not reach the main sensor 506.
- one or a plurality of auxiliary sensors A are arranged between the collimator lens 502 and the infrared light cut filter 510, and one or a plurality of auxiliary sensors A are arranged between the dimming member 520 and the aperture 503.
- Auxiliary sensor B is arranged.
- the light beam incident on the spectroscopic unit 500 is parallel to the collimator lens 502 and irradiates the diffraction grating 504.
- the diffraction grating 504 is tilted with respect to the optical axis of the collimator lens 502, the light passing through the collimator lens 502.
- auxiliary sensors A and B are arranged at positions where the light flux shaded by the diaphragm 503, that is, the light flux that is not used for the measurement by the main sensor 506 and is wasted can be received. Further, as shown in FIGS.
- one or a plurality of auxiliary sensors C may be arranged at positions where the 0th order light 840 diffracted by the diffraction grating 504 can be received.
- the received light data (diffraction-1st order light 830) and the diffraction 0th order light 840 by the main sensor 506 are ordered divided by the diffraction grating 504, and have the same luminous flux under the same conditions (the characteristics depending on the object 2 to be measured are the same). is there.
- Diffraction-1st order light 830 is acquired as spectroscopic data, but other orders are not used for measurement.
- the auxiliary sensor C receives the light flux that is shielded and is wasted.
- the diffraction 0th order light 840 has information on all wavelengths in the measurement wavelength range of 380 to 780 nm, and has a strong light intensity.
- auxiliary sensors A, B, and C are illustrated at three locations as shown in FIGS. 2 and 4, it is not necessary to arrange them at all positions, and the correction processing is performed as in the embodiment described later. You can place it in the required position.
- auxiliary sensors A1 to An, B1 to Bn, and C1 to Cn are used. It may be used to share the range range with each auxiliary sensor.
- a plurality of each is located between the collimator lens 502 and the infrared light cut filter 510, and between the dimming member 520 and the aperture 503, around the optical path of the light to be measured 820.
- Auxiliary sensors A1 to An and B1 to Bn are arranged respectively.
- auxiliary sensors A1 to An and B1 to Bn may be combined with auxiliary sensors C1 to Cn at a position where the 0th order light of diffraction 840 can be received.
- auxiliary sensors A, B, and C in order to control the amount of light received by each of the auxiliary sensors A, B, and C, as shown in FIG. 2, a mechanical diaphragm member 530 and an optical filter (not shown) are arranged in front of the auxiliary sensors A, B, and C. You may.
- the processing circuit 600 shown in FIG. 1 is a circuit that AD-converts the light-receiving data by the main sensor 506 and the light-receiving data by the auxiliary sensors A, B, and C, and the correction unit 700 outputs the auxiliary sensors A, B, and C.
- the output value of the main sensor 506 is corrected based on the value. The correction is performed so that the light receiving intensity value calculated from the output value of the main sensor 506 is the same as the light receiving intensity value calculated from the output values of the auxiliary sensors A, B, and C.
- the auxiliary sensor A is arranged in front of the infrared light cut filter 510, in other words, between the collimator lens 502 and the infrared light cut filter 510.
- the presence or absence of the dimming member 520 does not matter, but it is not considered to be this embodiment.
- One auxiliary sensor A may be used, or a plurality of auxiliary sensors A1 to An corresponding to the dynamic range may be used as in this embodiment.
- Auxiliary sensors A1 to An are equipped with an optical filter, and the light receiving sensitivity is set to the standard luminosity factor (V ⁇ ) in order to facilitate the calculation.
- the sensitivity may be other than the standard luminosity factor (V ⁇ ), or the optical filter may not be provided. It also has a table of the light receiving value and the brightness value (Lv) of the auxiliary sensor A.
- the auxiliary sensor Ax which is one of the auxiliary sensors A1 to An, acquires the absolute value of the brightness and corrects the level of the output value of the main sensor 506.
- the auxiliary sensor Ax and the main sensor 506 simultaneously receive and measure the luminous flux.
- FIG. 6 shows a flowchart of the measurement procedure.
- step S101 the light receiving data of the plurality of auxiliary sensors A1 to An is AD-converted by the processing circuit 600 to acquire the measurement data (light receiving data).
- step S102 the auxiliary sensor Ax having the optimum sensitivity is selected from the plurality of auxiliary sensors A1 to An, and the approximate brightness value (Lv0) of the object 2 to be measured is calculated from the output value of the auxiliary sensor Ax.
- the approximate brightness value (Lv0) is calculated by obtaining the brightness value corresponding to the output value of the auxiliary sensor Ax from the table of the output value of the auxiliary sensor Ax and the brightness value (Lv).
- the auxiliary sensor Ax to be used in this measurement is determined from the auxiliary sensors A1 to An. Normally, the selected auxiliary sensor Ax is also used in this measurement. Further, the measurement time (accumulation time) of the main sensor 506 and the auxiliary sensor Ax in this measurement is determined.
- step S103 the main measurement is performed in step S103. Specifically, the output value of the main sensor 506 and the output value of the auxiliary sensor Ax are acquired at the same time.
- step S104 the brightness (Lv1) of the object to be measured is calculated from the output value of the auxiliary sensor Ax. The calculation is performed based on the table of the output value and the brightness value of the auxiliary sensor Ax.
- step S105 spectral radiance data is calculated from the output value of the main sensor 506.
- the horizontal axis of the spectral radiance data is calculated from the pixel and wavelength table, and the vertical axis is calculated from the output value and spectral radiance table.
- the brightness (Lv2) is calculated from the calculated spectral radiance data.
- the output value of the main sensor 506 is corrected based on the output value of the auxiliary sensor Ax arranged in front of the infrared light cut filter 510, it exists behind the auxiliary sensor 506. Even if the transmittance of the infrared light cut filter 510 is changed due to environmental conditions, deterioration over time, etc., or even if the accuracy of the main sensor 506 is changed, it is properly corrected and the accuracy is high. Measurements can be made. Moreover, since the auxiliary sensor A is arranged in the optical path of the light flux that does not reach the main sensor 506, the output value of the main sensor 506 can be corrected without affecting the measurement by the main sensor 506.
- the first embodiment may be applied. If the dimming member 520 is present, the transmittance of the dimming member 520 is also compensated.
- the auxiliary sensor A is arranged in front of the dimming member 520 that is driven so as to be inserted and retracted with respect to the optical path of the light to be measured 820.
- the number of auxiliary sensors A may be one, or a plurality of auxiliary sensors A1 to An corresponding to the dynamic range may be used as in this embodiment.
- the presence or absence of the infrared light cut filter 510 does not matter, but it is not considered to be this embodiment.
- the auxiliary sensor A is equipped with an optical filter, and the light receiving sensitivity is set to the standard luminosity factor (V ⁇ ) in order to facilitate the calculation.
- the sensitivity may be other than the standard luminosity factor (V ⁇ ), or the optical filter may not be provided. It also has a table of the light receiving value and the brightness value (Lv) of the auxiliary sensor A.
- the auxiliary sensor A acquires the absolute value of the brightness and corrects the level of the output value of the main sensor.
- the auxiliary sensor A and the main sensor 506 simultaneously receive and measure the luminous flux.
- FIG. 8 shows a flowchart of the measurement procedure.
- the pre-measurement is performed with the dimming member 520 retracted from the optical path of the light to be measured 820. That is, in step S201, the light receiving data of the plurality of auxiliary sensors A1 to An is AD-converted by the processing circuit 600 to acquire the measurement data.
- step S202 the auxiliary sensor Ax having the optimum sensitivity is selected from the plurality of auxiliary sensors A1 to An, and the approximate brightness value (Lv0) of the object 2 to be measured is calculated from the output value of the auxiliary sensor Ax.
- the approximate brightness value (Lv0) is calculated by obtaining the brightness value corresponding to the output value of the auxiliary sensor Ax from the table of the output value of the auxiliary sensor Ax and the brightness value (Lv). Further, from the calculated approximate brightness value (Lv0), whether or not the dimming member 520 is used in the main measurement and the number of the dimming members 520 to be used are determined, and the auxiliary sensors A1 to An are used in the main measurement. Auxiliary sensor Ax to be used is determined. Normally, the selected auxiliary sensor Ax is also used in this measurement. Further, the measurement time (accumulation time) of the main sensor 506 and the auxiliary sensor Ax in this measurement is determined.
- step S204 the process proceeds to step S204 after inserting the determined number of dimming members 520 into the optical path in step S203.
- step S204 the output value of the main sensor 506 and the output value of the auxiliary sensor Ax are acquired at the same time.
- steps S205 to S208 and the result output processing of step S209 are performed. These processes are the correction calculation processing of steps S104 to S107 of FIG. 6 and the result output processing of step S108 described in the first embodiment. Since it is the same as, the description is omitted.
- the accuracy change of the main sensor 506 can be compensated and the dimming member 520 is inserted in the optical path.
- the infrared cut filter 510 is present behind the auxiliary sensor Ax, it is possible to compensate for the change in the transmittance of the infrared cut filter 510 and the change in the transmittance of the dimming member 520.
- an auxiliary sensor is located behind the dimming member 520 that is driven so as to be inserted and retracted with respect to the optical path of the light to be measured 820, in other words, between the dimming member 520 and the aperture 503.
- B is arranged or an auxiliary sensor C for receiving the diffraction 0th order light 840 is arranged, but in this example, the auxiliary sensor B is used.
- the number of auxiliary sensors B may be one, or a plurality of auxiliary sensors B1 to Bn corresponding to the dynamic range may be used as in this embodiment.
- the presence or absence of the infrared light cut filter 510 does not matter, but it is not considered to be this embodiment.
- the auxiliary sensor B is equipped with an optical filter, and the light receiving sensitivity is set to the standard luminosity factor (V ⁇ ) in order to facilitate the calculation.
- the sensitivity may be other than the standard luminosity factor (V ⁇ ), or the optical filter may not be provided. It also has a table of the light receiving value and the brightness value (Lv) of the auxiliary sensor B.
- the auxiliary sensor B acquires the absolute value of the brightness and corrects the level of the output value of the main sensor 506.
- the output value of the main sensor 506 is acquired with the dimming member 520 inserted in the optical path of the light to be measured 820, and the output value of the auxiliary sensor B is obtained with the dimming member 520 retracted from the optical path. get.
- FIG. 10 shows a flowchart of the measurement procedure.
- the pre-measurement is performed with the dimming member 520 retracted from the optical path of the light to be measured 820. That is, in step S301, the light receiving data of the plurality of auxiliary sensors B1 to Bn is AD-converted by the processing circuit 600 to acquire the measurement data. Next, in step S302, the auxiliary sensor Bx having the optimum sensitivity is selected from the plurality of auxiliary sensors B1 to Bn, and the approximate brightness value (Lv0) of the object 2 to be measured is calculated from the output value of the auxiliary sensor Bx.
- the approximate brightness value (Lv0) is calculated by obtaining the brightness value corresponding to the output value of the auxiliary sensor Bx from the table of the output value of the auxiliary sensor Bx and the brightness value (Lv). Further, from the calculated approximate brightness value (Lv0), whether or not the dimming member 520 is used in the main measurement and the number of the dimming members 520 to be used are determined, and the auxiliary sensors B1 to Bn are used in the main measurement. Auxiliary sensor Bx to be used is determined. Normally, the selected auxiliary sensor Bx is also used in this measurement. Further, the measurement time (accumulation time) of the main sensor 506 and the auxiliary sensor Bx in this measurement is determined.
- step S308 the output value of the main sensor 506 and the output value of the auxiliary sensor Bx are simultaneously acquired in step S303 while the dimming member 520 is retracted from the optical path, and then the step Proceed to S308.
- the determined number of dimming members 520 are inserted into the optical path of the light to be measured 820 in step S304, and then the output value of the main sensor 506 is set in step S305. get.
- the output value of the auxiliary sensor Bx is acquired in step S307, and the process proceeds to step S308.
- step S311 the correction calculation process of steps S308 to S311 and the result output process of step S312 are performed.
- the output value of the auxiliary sensor Bx is used to calculate the brightness (Lv1) of the object 2 to be measured in step S308. Since it is the same as the correction calculation process of steps S104 to S107 and the result output process of step S108 described in the first embodiment, the description thereof will be omitted.
- the auxiliary sensor B is arranged behind the dimming member 520, and the output value of the auxiliary sensor B acquired in a state where the dimming member 520 is retracted from the optical path of the light to be measured 820 is used. Since the output value of the main sensor 506 acquired while the dimming member 520 is inserted in the optical path is corrected, it is possible to compensate for the change in the transmittance of the dimming member 520 and the change in the accuracy of the main sensor 506, and the accuracy is high. Measurements can be made. If the infrared light cut filter 510 is present, it can be compensated for by including a change in the transmittance of the infrared light cut filter 510.
- the auxiliary sensor B is located behind the dimming member 520 driven so as to be able to advance and retreat with respect to the optical path of the light to be measured 820, in other words, between the dimming member 520 and the aperture 503.
- an auxiliary sensor C that receives the 0th-order diffraction light 840 is placed, but in this example, the auxiliary sensor C that receives the 0th-order diffraction light is used.
- the number of auxiliary sensors C may be one, or a plurality of auxiliary sensors C1 to Cn corresponding to the dynamic range may be used as in this embodiment.
- auxiliary sensors A arranged in front of the dimming member 520 are also used.
- the presence or absence of the infrared light cut filter 510 does not matter, but it is not considered to be this embodiment.
- Each of the auxiliary sensors C1 to Cn and A is equipped with an optical filter, and the light receiving sensitivity is set to the standard luminosity factor (V ⁇ ) in order to facilitate the calculation.
- the sensitivity may be other than the standard luminosity factor (V ⁇ ), or the optical filter may not be provided. It also has a table of the light receiving value and the brightness value (Lv) of the auxiliary sensor C.
- the auxiliary sensor C acquires the absolute value of the brightness and corrects the level of the output value of the main sensor 506. In addition, the auxiliary sensor A corrects the time change.
- FIG. 12 shows a flowchart of the measurement procedure.
- the pre-measurement is performed with the dimming member 520 retracted from the optical path of the light to be measured 820. That is, in step S401, the light receiving data of the plurality of auxiliary sensors C1 to Cn are AD-converted by the processing circuit 600 to acquire the measurement data.
- the auxiliary sensor Cx having the optimum sensitivity is selected from the plurality of auxiliary sensors C1 to Cn, and the approximate brightness value (Lv0) of the object 2 to be measured is calculated from the output value of the auxiliary sensor Cx.
- the approximate brightness value (Lv0) is calculated by obtaining the brightness value corresponding to the output value of the auxiliary sensor Cx from the table of the output value of the auxiliary sensor Cx and the brightness value (Lv). Further, from the calculated approximate brightness value (Lv0), whether or not the dimming member 520 is used in the main measurement and the number of the dimming members 520 to be used are determined, and the auxiliary sensors A1 to An are used in the main measurement. The auxiliary sensor Ax to be used is determined, and the auxiliary sensor Cx is determined from the auxiliary sensors C1 to Cn. Normally, the selected auxiliary sensor Cx is also used in this measurement. Further, the measurement time (accumulation time) of the main sensor 506, the auxiliary sensor Ax, and the auxiliary sensor Cx in this measurement is determined.
- step S403 the output value of the main sensor 506 and the output value of the auxiliary sensor Cx are simultaneously set in step S403 while keeping the dimming member 520 retracted from the optical path of the light to be measured 820.
- step S408 the determined number of dimming members 520 are inserted into the optical path in step S404, and then the output value of the main sensor 506 and the output of the auxiliary sensor Ax are output in step S405.
- the value a1 is acquired at the same time.
- step S406 After the dimming member 520 is retracted from the optical path in step S406, the output value a2 of the auxiliary sensor Ax and the output value b of the auxiliary sensor Cx are simultaneously acquired in step S407, and the process proceeds to step S408.
- step S408 the brightness (Lv1) of the object to be measured is calculated from the output value of the auxiliary sensor Cx. The calculation is performed based on the table of the output value and the brightness value of the auxiliary sensor Cx.
- step S411 the spectral radiance data is calculated from the output value of the main sensor 506, and the brightness (Lv2) is calculated from the calculated spectral radiance data.
- step S414 the spectral radiance data is corrected by each correction coefficient over all wavelengths. Then, in step S415, the corrected spectral radiance data is output.
- the dimming member 520 is acquired in the state of being inserted into the optical path by the output value of the auxiliary sensor Cx acquired in the state of being retracted from the optical path of the light to be measured 820.
- the output value of the auxiliary sensor 506 is corrected, and the change in the amount of light over time due to the difference between the acquisition timing of the auxiliary sensor Cx and the acquisition timing of the output value of the main sensor 506 is measured at each timing. Since it is corrected by the time difference count (temporal change rate of light amount) which is the ratio of the values a1 and a2, more accurate measurement can be performed.
- the infrared cut filter 510 is present behind the auxiliary sensor Ax, it is possible to compensate for the change in the transmittance of the infrared cut filter 510 and the change in the transmittance of the dimming member 520.
- an auxiliary sensor A is arranged between the collimator lens 502 and the infrared light cut filter 510, and one auxiliary sensor B is arranged behind the infrared light cut filter 510. ..
- the presence or absence of the dimming member 520 does not matter, but it is not considered to be this embodiment.
- the number of auxiliary sensors A may be one, or a plurality of auxiliary sensors A1 to An corresponding to the dynamic range may be used as in this embodiment. Since the rear auxiliary sensor B has passed through the dimming member 520, the one set to an appropriate amount of light is used.
- auxiliary sensor B instead of the auxiliary sensor B, one auxiliary sensor C that receives the diffraction 0th order light may be used.
- Auxiliary sensors A1 to An are equipped with an optical filter, and the light receiving sensitivity is set to the standard luminosity factor (V ⁇ ) in order to facilitate the calculation.
- the sensitivity may be other than the standard luminosity factor (V ⁇ ), or the optical filter may not be provided. It also has a table of the light receiving value and the brightness value (Lv) of the auxiliary sensor A. Further, at the time of shipment from the factory, a reference value (referred to as a reference auxiliary sensor ratio) of the output value ratio of the auxiliary sensor A and the auxiliary sensor B (when the auxiliary sensor C is used, the auxiliary sensor C) is stored.
- V ⁇ standard luminosity factor
- Lv brightness value
- the transmittance of the infrared light cut filter 510 is set from the factory default based on the reference auxiliary sensor ratio of the auxiliary sensors A1 to An in front of the infrared light cut filter 510 and the auxiliary sensor B in the rear. It compensates for change.
- FIG. 14 shows a flowchart of the measurement procedure.
- step S501 the received light data of the plurality of auxiliary sensors A1 to An is AD-converted by the processing circuit 600 to acquire the measurement data.
- step S502 the auxiliary sensor Ax having the optimum sensitivity is selected from the plurality of auxiliary sensors A1 to An, and the approximate brightness value (Lv0) of the object 2 to be measured is calculated from the output value of the auxiliary sensor Ax.
- the approximate brightness value (Lv0) is calculated by obtaining the brightness value corresponding to the output value of the auxiliary sensor Ax from the table of the output value of the auxiliary sensor Ax and the brightness value (Lv).
- the auxiliary sensor Ax to be used in this measurement is determined from the auxiliary sensors A1 to An. Normally, the selected auxiliary sensor Ax is also used in this measurement. Further, the measurement time (accumulation time) of the main sensor 506, the auxiliary sensor Ax, and the auxiliary sensor B in this measurement is determined.
- step S503 the main measurement is performed in step S503. Specifically, the output values of the main sensor 506, the auxiliary sensor Ax, and the auxiliary sensor B are acquired at the same time.
- spectral radiance data is calculated from the output value of the main sensor 506.
- the horizontal axis of the spectral radiance data is calculated from the pixel and wavelength table, and the other and axes are calculated from the output value and spectral radiance table.
- the brightness (Lv2) is calculated from the calculated spectral radiance data.
- step S507 the spectral radiance data is corrected with the rate of change calculated in step S505 over all wavelengths. Then, in step S108, the corrected spectral radiance data is output.
- the transmittance of the infrared light cut filter 510 and the like from the factory shipment are based on the output values of the auxiliary sensor Ax in front of the infrared light cut filter 510 and the auxiliary sensor B in the rear. Since the change is corrected by the rate of change and the output value of the main sensor 506 is corrected by this rate of change, the transmittance of the infrared light cut filter 510 and the like are changed due to environmental conditions, deterioration over time, and the like. However, it is possible to perform highly accurate measurement. When the infrared light cut filter 510 does not exist and the fixed dimming member 520 is provided, the change in the transmittance of the dimming member 520 can be compensated.
- both the infrared light cut filter 510 and the dimming member 520 are present between the auxiliary sensors A1 to An and the auxiliary sensor B, the entire infrared light cut filter 510 and the dimming member 520 are combined. It is possible to compensate for changes in transmittance and the like.
- the auxiliary sensor A is arranged in front of the dimming member 520 that is driven so as to advance and retreat with respect to the optical path of the light to be measured 820 of the light to be measured 820, and further, the diffraction 0th order One auxiliary sensor C that receives light 840 is arranged.
- the number of auxiliary sensors A may be one, or a plurality of auxiliary sensors A1 to An corresponding to the dynamic range may be used as in this embodiment. Since the auxiliary sensor C has passed through the dimming member 520, the one set to an appropriate amount of light is used.
- the auxiliary sensor B arranged between the dimming member 520 and the aperture 503 may be used.
- the presence or absence of the infrared light cut filter 510 does not matter, but it is not considered to be this embodiment.
- the auxiliary sensor A is equipped with an optical filter, and the light receiving sensitivity is set to the standard luminosity factor (V ⁇ ) in order to facilitate the calculation.
- the sensitivity may be other than the standard luminosity factor (V ⁇ ), or the optical filter may not be provided. It also has a table of the light receiving value and the brightness value (Lv) of the auxiliary sensor A. Further, at the time of shipment from the factory, a reference value (reference auxiliary sensor ratio) of the output value ratio of the auxiliary sensors A and C is stored.
- the change in the transmittance of the dimming member 520 from the factory is compensated based on the reference auxiliary sensor ratio of the auxiliary sensors A1 to An in front of the dimming member 520 and the auxiliary sensor C in the rear. It is a thing.
- FIG. 16 shows a flowchart of the measurement procedure.
- step S601 the light receiving data of the plurality of auxiliary sensors A1 to An is AD-converted by the processing circuit 600 to acquire the measurement data.
- step S602 the auxiliary sensor Ax having the optimum sensitivity is selected from the plurality of auxiliary sensors A1 to An, and the approximate brightness value (Lv0) of the object 2 to be measured is calculated from the output value of the auxiliary sensor Ax.
- the approximate brightness value (Lv0) is calculated by obtaining the brightness value corresponding to the output value of the auxiliary sensor Ax from the table of the output value of the auxiliary sensor Ax and the brightness value (Lv).
- the auxiliary sensors A1 to An are used in the main measurement.
- Auxiliary sensor Ax to be used is determined. Normally, the selected auxiliary sensor Ax is also used in this measurement. Further, the measurement time (accumulation time) of the main sensor 506, the auxiliary sensor Ax, and the auxiliary sensor C in this measurement is determined.
- step S604 After inserting the determined number of dimming members 520 into the optical path in step S603.
- step S604 the output values of the main sensor 506, the auxiliary sensor Ax, and the auxiliary sensor C are acquired at the same time.
- step S605 to S608 the correction calculation process of steps S605 to S608 and the result output process of step S609 are performed.
- the output value of the auxiliary sensor C is used instead of the auxiliary sensor B to calculate the auxiliary sensor ratio in step S605. Since it is the same as the correction calculation process of steps S504 to S507 of FIG. 11 and the result output process of step S508 described in the fifth embodiment, the description thereof will be omitted.
- the transmittance of the dimming member 520 and the like are changed from the factory default based on the output values of the auxiliary sensor Ax arranged in front of the dimming member 520 and the auxiliary sensor C in the rear. Is corrected by the rate of change, and the output value of the main sensor 506 is corrected by this rate of change. Therefore, even if the transmittance of the dimming member 520 changes due to environmental conditions, deterioration over time, etc., the accuracy is correct. High measurement can be performed.
- the change in the transmittance of the infrared light cut filter 510 and the dimming member 520 combined is compensated. Can be done.
- the auxiliary sensor B is arranged behind the dimming member 520 that is driven so as to advance and retreat with respect to the optical path of the light to be measured 820.
- the number of auxiliary sensors B may be one, or a plurality of auxiliary sensors B1 to Bn corresponding to the dynamic range may be used as in this embodiment.
- the auxiliary sensor C that receives the diffraction 0th order light 840 may be used.
- the presence or absence of the infrared light cut filter 510 does not matter, but it is not considered to be this embodiment.
- the auxiliary sensor B is equipped with an optical filter, and the light receiving sensitivity is set to the standard luminosity factor (V ⁇ ) in order to facilitate the calculation.
- the sensitivity may be other than the standard luminosity factor (V ⁇ ), or the optical filter may not be provided. It also has a table of the light receiving value and the brightness value (Lv) of the auxiliary sensor B.
- the dimming rate of the dimming member 520 is obtained and corrected from the output value ratio of the auxiliary sensor B when the dimming member 520 is inserted into the optical path and when it is retracted.
- FIG. 18 shows a flowchart of the measurement procedure.
- step S701 the light receiving data of the plurality of auxiliary sensors B1 to Bn is AD-converted by the processing circuit 600 to acquire the measurement data.
- step S702 the auxiliary sensor Bx having the optimum sensitivity is selected from the plurality of auxiliary sensors B1 to Bn. Further, from the output value of the auxiliary sensor Bx, whether or not the dimming member 520 is used in the main measurement and the number of the dimming members to be used are determined, and the dimming member used in the main measurement from the auxiliary sensors B1 to Bn.
- the auxiliary sensor Bx when there is and the auxiliary sensor By when there is no dimming member are determined.
- the auxiliary sensor Bx and the auxiliary sensor By may be the same. Further, the measurement time (accumulation time) of the main sensor 506, the auxiliary sensor Bx, and the auxiliary sensor By in this measurement is determined.
- steps S103 to S108 of FIG. 6 are performed while keeping the dimming member 520 retracted from the optical path of the light to be measured 820.
- the "auxiliary sensor Ax" in steps S103 and S104 is replaced with the "auxiliary sensor Bx”.
- step S704 the determined number of dimming members 520 are inserted into the optical path in step S704, and then the output value of the main sensor 506 and the output of the auxiliary sensor Bx in step S705. Get the value ⁇ at the same time.
- step S706 the dimming member 520 is retracted from the optical path in step S706, the output value ⁇ of the auxiliary sensor By is acquired in step S707.
- step S709 spectral radiance data is calculated from the output value of the main sensor 506. Then, the brightness (Lv2) is calculated from the calculated spectral radiance data.
- step S710 the spectral radiance data is corrected over all wavelengths with the dimming rate calculated in step S708. Then, in step S711, the corrected spectral radiance data is output.
- the dimming rate of the dimming member 520 is obtained based on the output values of the auxiliary sensors Bx and By arranged behind the dimming member 520, and the change in the transmittance and the like is reduced. It is corrected by the light rate, and the output value of the main sensor is corrected by this dimming rate. Therefore, even if the transmittance of the dimming member 520 changes due to environmental conditions, deterioration over time, etc. High measurements can be made.
- the auxiliary sensor B is arranged between the dimming member 520 and the diaphragm 503, which are driven so as to advance and retreat with respect to the optical path of the light to be measured 820, or the diffraction 0th order light 840.
- the auxiliary sensor C that receives light is arranged, in this example, it is assumed that the auxiliary sensor C that receives the diffraction 0th order light 840 is used.
- the number of auxiliary sensors C may be one, or a plurality of auxiliary sensors C1 to Cn corresponding to the dynamic range may be used as in this embodiment.
- auxiliary sensors A1 to An arranged in front of the dimming member 520 are also used.
- the presence or absence of the infrared light cut filter 510 does not matter, but it is not considered to be this embodiment.
- the auxiliary sensor C is equipped with an optical filter, and the light receiving sensitivity is set to the standard luminosity factor (V ⁇ ) in order to facilitate the calculation.
- the sensitivity may be other than the standard luminosity factor (V ⁇ ), or the optical filter may not be provided. It also has a table of the light receiving value and the brightness value (Lv) of the auxiliary sensor C.
- the dimming rate of the dimming member 520 is obtained and corrected from the output value ratio of the auxiliary sensor C when the light to be measured 820 is inserted into the optical path and when the light is retracted. ..
- the auxiliary sensor A corrects the time change.
- FIG. 20 shows a flowchart of the measurement procedure.
- the pre-measurement is performed with the dimming member 520 retracted from the optical path of the light to be measured 820. That is, in step S801, the light receiving data of the plurality of auxiliary sensors C1 to Cn is AD-converted by the processing circuit 600 to acquire the measurement data.
- the auxiliary sensor Cx having the optimum sensitivity is selected from the plurality of auxiliary sensors C1 to Cn. Further, from the output value of the auxiliary sensor Cx, whether or not the dimming member 520 is used in the main measurement and the number of the dimming members 520 are used, and the auxiliary sensor Ax used in the main measurement is selected from the auxiliary sensors A1 to An.
- the auxiliary sensor Cx when the dimming member is present and the auxiliary sensor Cy when the dimming member is not used are determined.
- the auxiliary sensor Cx and the auxiliary sensor Cy may be the same. Further, the measurement time (accumulation time) of the main sensor 506, the auxiliary sensor Ax, the auxiliary sensor Cx, and the auxiliary sensor Cy in this measurement is determined.
- the main measurement is performed.
- the processes of steps S103 to S108 of FIG. 6 are performed while keeping the dimming member 520 retracted from the optical path of the light to be measured 820.
- the "auxiliary sensor Ax" in steps S103 and S104 is replaced with the "auxiliary sensor Cx".
- the output value of the main sensor 506 and the auxiliary sensor Ax in step S805 are acquired at the same time.
- the output value b of the auxiliary sensor Ax and the output value ⁇ of the auxiliary sensor Cy are simultaneously acquired in step S807.
- step S810 spectral radiance data is calculated from the output value of the main sensor 506. Then, the brightness (Lv2) is calculated from the calculated spectral radiance data.
- step S811 the spectral radiance data is corrected over all wavelengths with the dimming rate calculated in step S809. Then, in step S812, the corrected spectral radiance data is output.
- the dimming rate of the dimming member 520 is obtained based on the output values of the auxiliary sensors Cx and Cy arranged behind the dimming member 520, and the change in the transmittance and the like is reduced. It is corrected by the light rate, and the output value of the main sensor 506 is corrected by this dimming rate. Therefore, even if the transmittance of the dimming member 520 changes due to environmental conditions, deterioration over time, etc., the accuracy is correct. High measurement can be performed. Moreover, since the time difference coefficient, which is the ratio of the output values a and b of the auxiliary sensor Ax measured at different timings, corrects the change in the amount of light with time, the dimming rate can be measured with higher accuracy.
- the present invention can be used when measuring the brightness and chromaticity of a light source, the spectral reflectance of an object, the color value, and the like.
- Spectral measuring instrument 1 Spectral measuring instrument 2 Object to be measured 3 Light to be measured 100 Light receiving optical system 200 Observation optical system 300 Measuring optical system 400 Light guide part 402 Bundle fiber 500 Spectral part 501 Incident slit 502 Collimeter lens 503 Aperture 503a Opening 504 Diffraction lattice 506 Sensor 510 Infrared light cut filter 520 Dimming member 600 Processing circuit 700 Correction unit 810 Corimeter lens passing light 820 Measured light 840 Diffraction 0th order light A to C, A1 to An, B1 to Bn, C1 to Cn Auxiliary sensor
Landscapes
- Physics & Mathematics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- General Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Spectrometry And Color Measurement (AREA)
Abstract
入射部(401)、(501)から入射した被測定光(820)を回折させる回折手段(504)と、回折手段(504)で回折された被測定光を受光する主センサ(506)と、入射部から入射した光束のうち、主センサ(506)に到達しない光束の光路に配置されて該光を受光する1個又は複数個の補助センサ(A)~(C)と、補助センサの出力値に基づいて主センサの出力値を補正する補正手段(700)を備えている。
Description
この発明は、光源の輝度や色度、物体の分光反射率や色彩値等の測定に用いられる分光測定器に関する。
上記のような分光測定器として、光源等の測定エリアからの被測定光を対物レンズ、開口絞り、集光リレーレンズ等の光学系を介して入射部としての入射スリットへと導き、入射スリットから入射した被測定光を回折格子等の回折手段で回折分光させ、回折された光を受光センサで受光して測定値を得る構成の装置が、従来から知られている。また、入射スリットに代え或いは入射スリットと共に、集光リレーレンズで集光された被測定光を入射位置まで導くバンドルファイバーを備えた構成の装置も知られている(例えば特許文献1及び2参照)。
このような分光測定器では、測定環境の変化や経時劣化によって受光センサ自体の精度が変化することがある。また、入射スリットやバンドルファイバー等の入射部から入射された被測定光が受光センサで受光されるまでの経路に、光学系部品が配置される場合があるが、環境条件や経時劣化等によって光学系部品の透過率に変化が発生した場合も、精度の高い測定を行うことができない。光学系部品について説明すると、次の通りである。
光学系部品としては、NDフィルター、液晶シャッター、拡散板等の減光部材や、測定波長範囲(例えば380~780nm)以外の波長帯をカットする赤外光カットフィルターや紫外光カットフィルター等の光学フィルターを挙げることができる。なお、NDフィルターには、ガラス基板に金属膜(例えばクロム)を蒸着したNDフィルターや、干渉膜のNDフィルター、色吸収フィルター等がある。
上述した減光部材は、ダイナミックレンジの広い測定を可能にするために使用される。即ち、分光測定器が輝度計であり、輝度計の測定輝度範囲よりも受光センサのダイナミックレンジが狭い場合、被測定物の輝度に応じ、減光部材を自動又は手動で光路に挿入し或いは光路から退避させることにより受光強度を制御し、これによりダイナミックレンジの広い測定が可能となる。
具体的には、輝度範囲が0.0005~100000cd/m2の測定を行う場合、受光センサが一般的なシリコンセンサであれば、ダイナミックレンジは500万倍程度であるため、減光部材なしで0.0005~250cd/m2の輝度範囲の測定を行い、減光部材して例えば透過率5%のNDフィルターを光路に1枚配置し~5000cd/m2の測定を行い、透過率5%のNDフィルターを光路に2枚配置し(5%×5%=0.25%の透過率となる)、~100000cd/m2の測定を行うことができる。
しかしながら、減光部材は、使用環境温度による透過率の変化や、高温・高湿環境下の保管や光暴露等による経年劣化が生じて、精度の高い測定を行うことができなくなる場合がある。例えば、透過率5%の減光部材が、透過率の絶対値で0.1%変化しただけで、受光データは相対値で2%の誤差が生じることになる。
また、金属蒸着膜のNDフィルターは膜の酸化により経年的に透過率が高くなる特徴がある。干渉膜のNDフィルターは、光路に対して傾きによる透過率依存があり、光路への進退駆動の再現性や測定器の姿勢方向によってフィルター傾斜が変化し、このため透過率変動が大きい。吸収型の色フィルター、液晶シャッター、拡散板等は、環境温度による透過率の変化が大きく、さらには波長毎に透過率変化が違うので、色度値にも影響する。
減光部材だけでなく、光学フィルターも環境温度による透過率の変化が発生しやすく、やはり精度の高い測定を行うことができなくなる場合がある。
このように、測定環境の変化や経時劣化によって受光センサ自体の精度が変化した場合、精度の高い測定を行うことができないという課題がある。あるいはまた、入射スリットやバンドルファイバー等の入射部から入射された被測定光が受光センサで受光されるまでの経路に、光学系部品が介在する場合、環境条件や経時劣化等によって光学系部品の透過率に変化が発生すると、精度の高い測定を行うことができないという課題もある。
なお、特許文献2には、0次回折光を有効活用する分光測定器として、被測定光を分光する回折手段と、回折手段からの0次回折光を受光する第一光電変換素子と、回折手段からの高次回折光を受光する第二光電変換素子と、第一光電変換素子で光電変換された0次回折光の受光出力に基づいて、第二光電変換素子での積分時間を制御する分光測定器が開示されている。
しかしながら、特許文献2に記載の分光測定器は、0次回折光の受光出力に基づいて、受光センサでの積分時間を制御するものであって、受光センサの出力値を補正するものではない。このため、受光センサ自体の精度が変化した場合や、入射スリットやバンドルファイバー等の入射部から入射された被測定光が受光センサで受光されるまでの経路に介在される光学系部品の透過率が、環境条件や経時劣化等によって変化した場合に、精度の高い測定を行うことができないという課題に対して、解決策を提供しうるものではなかった。
この発明はこのような技術的背景に鑑みてなされたものであって、受光センサ自体の精度が変化した場合や、入射スリットやバンドルファイバー等の入射部から入射された被測定光が受光センサで受光されるまでの経路に介在される光学系部品の透過率が、環境条件や経時劣化等によって変化した場合においても、精度の高い測定を行うことができる分光測定器を提供することを目的とする。
上記目的は以下の手段によって達成される。
(1)入射部から入射した被測定光を回折させる回折手段と、前記回折手段で回折された被測定光を受光する主センサと、前記入射部から入射した光束のうち、前記主センサに到達しない光束の光路に配置されて該光束を受光する1個又は複数個の補助センサと、前記補助センサの出力値に基づいて前記主センサの出力値を補正する補正手段と、を備えた分光測定器。
(2)前記補正手段は、前記主センサの出力値から演算した受光強度値が、前記補助センサの出力値から演算した受光強度値と同じになるように、前記主センサの出力値を補正する前項1に記載の分光測定器。
(3)前記主センサの受光光量を調整するための受光光量調整部材を備えている前項1又は2に記載の分光測定器。
(4)前記受光光量調整部材は、前記被測定光の光路に対して挿入退避可能に配置される減光部材である前項3に記載の分光測定器。
(5)前記受光光量調整部材の前方に前記補助センサが配置され、前記補正手段は、前記主センサと前記補助センサの出力値を同時に取得して、前記主センサの出力値を補正する前項3又は4に記載の分光測定器。
(6)前記減光部材の後方に第1の補助センサが配置され、前記補正手段は、前記減光部材の光路への挿入状態で前記主センサの出力値を取得し、光路からの退避状態で前記第1の補助センサの出力値を取得して、前記主センサの出力値を補正する前項4に記載の分光測定器。
(7)前記減光部材の前方に第2の補助センサが配置され、前記補正手段は、前記主センサの出力値の取得時と前記第1の補助センサの出力値の取得時のそれぞれのタイミングで前記第2の補助センサの出力値を取得し、取得した前記第2の補助センサの出力値の比から時間的な光量変化率を算出し、算出された前記光量変化率に基づいて時間的な光量変化を補正する前項6に記載の分光測定器。
(8)前記受光光量調整部材の前方に第1の補助センサが、後方に第2の補助センサがそれぞれ配置され、前記補正手段は、前記主センサ、第1の補助センサ及び第2の補助センサの出力値を同時に取得し、取得された前記第1の補助センサ及び第2の補助センサの出力値比の基準値からの変化率に基づいて、前記主センサの出力値を補正する前項3または4に記載の分光測定器。
(9)前記減光部材の後方に第1の補助センサが配置され、前記補正手段は、前記減光部材の光路への挿入状態で前記主センサの出力値と前記第1の補助センサの出力値を同時に取得し、前記減光部材の光路からの退避状態で前記第1の補助センサの出力値を取得し、取得された前記第1の補助センサのそれぞれの出力値の比に基づいて、前記主センサの出力値を補正する前項4に記載の分光測定器。
(10)前記減光部材の前方に第2の補助センサが配置され、前記補正手段は、前記第1の補助センサの出力値の取得タイミングと同じタイミングで前記第2の補助センサの出力値を2回取得し、取得された前記第2の補助センサの2回の出力値の比から時間的な光量変化率を算出し、算出された前記光量変化率に基づいて時間的な光量変化を補正する前項9に記載の分光測定器。
(11)前記補助センサは、前記入射部から入射した光束のうち、前記回折格子へ照射されない光束を受光する前項1~10のいずれかに記載の分光測定器。
(12)前記補助センサは回折0次光を受光する前項1~10のいずれかに記載の分光測定器。
(13)前記補助センサは、それぞれ受光可能な光量範囲が異なっている複数個の補助センサである前項1~12のいずれかに記載の分光測定器。
(14)前記補助センサの受光光量を制御する開口絞りを備えている前項1~13のいずれかに記載の分光測定器。
(15)前記補助センサの受光光量を制御する光学フィルターを備えている前項1~13のいずれかに記載の分光測定器。
(16)前記補助センサは、受光感度が標準視感度となる光学フィルターを備えている前項1~15のいずれかに記載の分光測定器。
(1)入射部から入射した被測定光を回折させる回折手段と、前記回折手段で回折された被測定光を受光する主センサと、前記入射部から入射した光束のうち、前記主センサに到達しない光束の光路に配置されて該光束を受光する1個又は複数個の補助センサと、前記補助センサの出力値に基づいて前記主センサの出力値を補正する補正手段と、を備えた分光測定器。
(2)前記補正手段は、前記主センサの出力値から演算した受光強度値が、前記補助センサの出力値から演算した受光強度値と同じになるように、前記主センサの出力値を補正する前項1に記載の分光測定器。
(3)前記主センサの受光光量を調整するための受光光量調整部材を備えている前項1又は2に記載の分光測定器。
(4)前記受光光量調整部材は、前記被測定光の光路に対して挿入退避可能に配置される減光部材である前項3に記載の分光測定器。
(5)前記受光光量調整部材の前方に前記補助センサが配置され、前記補正手段は、前記主センサと前記補助センサの出力値を同時に取得して、前記主センサの出力値を補正する前項3又は4に記載の分光測定器。
(6)前記減光部材の後方に第1の補助センサが配置され、前記補正手段は、前記減光部材の光路への挿入状態で前記主センサの出力値を取得し、光路からの退避状態で前記第1の補助センサの出力値を取得して、前記主センサの出力値を補正する前項4に記載の分光測定器。
(7)前記減光部材の前方に第2の補助センサが配置され、前記補正手段は、前記主センサの出力値の取得時と前記第1の補助センサの出力値の取得時のそれぞれのタイミングで前記第2の補助センサの出力値を取得し、取得した前記第2の補助センサの出力値の比から時間的な光量変化率を算出し、算出された前記光量変化率に基づいて時間的な光量変化を補正する前項6に記載の分光測定器。
(8)前記受光光量調整部材の前方に第1の補助センサが、後方に第2の補助センサがそれぞれ配置され、前記補正手段は、前記主センサ、第1の補助センサ及び第2の補助センサの出力値を同時に取得し、取得された前記第1の補助センサ及び第2の補助センサの出力値比の基準値からの変化率に基づいて、前記主センサの出力値を補正する前項3または4に記載の分光測定器。
(9)前記減光部材の後方に第1の補助センサが配置され、前記補正手段は、前記減光部材の光路への挿入状態で前記主センサの出力値と前記第1の補助センサの出力値を同時に取得し、前記減光部材の光路からの退避状態で前記第1の補助センサの出力値を取得し、取得された前記第1の補助センサのそれぞれの出力値の比に基づいて、前記主センサの出力値を補正する前項4に記載の分光測定器。
(10)前記減光部材の前方に第2の補助センサが配置され、前記補正手段は、前記第1の補助センサの出力値の取得タイミングと同じタイミングで前記第2の補助センサの出力値を2回取得し、取得された前記第2の補助センサの2回の出力値の比から時間的な光量変化率を算出し、算出された前記光量変化率に基づいて時間的な光量変化を補正する前項9に記載の分光測定器。
(11)前記補助センサは、前記入射部から入射した光束のうち、前記回折格子へ照射されない光束を受光する前項1~10のいずれかに記載の分光測定器。
(12)前記補助センサは回折0次光を受光する前項1~10のいずれかに記載の分光測定器。
(13)前記補助センサは、それぞれ受光可能な光量範囲が異なっている複数個の補助センサである前項1~12のいずれかに記載の分光測定器。
(14)前記補助センサの受光光量を制御する開口絞りを備えている前項1~13のいずれかに記載の分光測定器。
(15)前記補助センサの受光光量を制御する光学フィルターを備えている前項1~13のいずれかに記載の分光測定器。
(16)前記補助センサは、受光感度が標準視感度となる光学フィルターを備えている前項1~15のいずれかに記載の分光測定器。
前項(1)に記載の発明によれば、主センサは、入射部から入射し回折手段で回折された被測定光を受光する。入射部から入射した光束のうち、前記主センサに到達しない光束の光路に配置されて該光を受光する1個又は複数個の補助センサが備えられ、補助センサの出力値に基づいて主センサの出力値が補正される。従って、受光センサである主センサ自体の精度が変化した場合や、入射スリットやバンドルファイバー等の入射部から入射され受光センサで受光されるまでの被測定光の経路に介在される光学系部品の透過率が、環境条件や経時劣化等によって変化した場合であっても、主センサの精度変化や、光学系部品の透過率の変化を補償することができ、精度の高い測定を行うことができる。しかも、補助センサは、主センサに到達しない光束の光路に配置されているから、主センサによる測定に影響を及ぼすことなく、主センサの出力値を補正することができる。
前項(2)に記載の発明によれば、主センサの出力値から演算した受光強度値が、補助センサの出力値から演算した受光強度値と同じになるように、主センサの出力値が補正されるから、主センサの精度変化や、光学系部品の透過率の変化を確実に補償することができる。
前項(3)に記載の発明によれば、主センサの受光光量を調整するための受光光量調整部材の透過率等が変化した場合であっても、補助センサの出力値に基づいて主センサの出力値が補正されるから、精度の高い測定を行うことができる。
前項(4)に記載の発明によれば、被測定光の光路に対して挿入退避可能に配置される減光部材の透過率等が変化した場合であっても、補助センサの出力値に基づいて主センサの出力値が補正されるから、精度の高い測定を行うことができる。
前項(5)に記載の発明によれば、受光光量調整部材の透過率変化や主センサの精度変化を一括して補正することができる。
前項(6)に記載の発明によれば、減光部材の透過率変化や主センサの精度変化を一括して補正することができる。特に、減光部材の前方に補助センサの配置スペースを確保できない場合に有効である。
前項(7)に記載の発明によれば、前項(6)の効果に加えて、主センサの出力値の取得時と第1の補助センサの出力値の取得時のタイミングが異なることに起因する時間的な光量変化を補正して、より精度の高い測定を行うことができる。
前項(8)に記載の発明によれば、受光光量調整部材の環境条件や経時劣化等による透過率変化を補償でき、精度の高い測定が可能となる。
前項(9)に記載の発明によれば、受光光量調整部材の環境条件や経時劣化等による透過率変化を補償でき、精度の高い測定が可能となる。特に、減光部材の前方に補助センサの配置スペースを確保できない場合に有効である。
前項(10)に記載の発明によれば、前項(9)の効果に加えて、主センサの出力値の取得時と第1の補助センサの出力値の取得時のタイミングが異なることに起因する時間的な光量変化を補正して、より精度の高い測定を行うことができる。
前項(11)に記載の発明によれば、入射スリットの通過光束のうち、回折格子へ照射されない光束を受光する位置の補助センサによって、主センサの出力値を補正することができる。
前項(12)に記載の発明によれば、回折0次光を受光した補助センサの出力に基づいて、主センサの出力値を補正することができる。
前項(13)に記載の発明によれば、補助センサは、それぞれ受光可能な光量範囲が異なっている複数個の補助センサであるから、測定器度範囲に対してダイナミックレンジを確保することができる。
前項(14)に記載の発明によれば、開口絞りにより補助センサの受光光量を制御することができる。
前項(15)に記載の発明によれば、光学フィルターにより補助センサの受光光量を制御することができる。
前項(16)に記載の発明によれば、補助センサの出力値による被測定物の輝度の算出のための計算が簡単になる。
以下、この発明の実施形態を図面に基づいて説明する。
図1は、本発明の一実施形態に係る分光測定器である分光輝度計の基本構成を示す図である。図1に示すように、分光測定器1は、受光光学系100と、観察光学系200と、測定光学系300と、処理回路600と、補正部700を備えており、測定光学系300はさらに導光部400と分光部500を備えている。
受光光学系100は、光源からなる被測定物2からの光束3を受光して、測定光学系300の導光部400及び観察光学系200へと導くものであり、被測定物2からの光束3を集光する対物レンズ101と、対物レンズ101の後方(光束3の進行方向の前方)に配置された測定光量規制用の開口絞り102と、さらに開口絞り102の後方に配置されたアパーチャーミラー103を備えている。
アパーチャーミラー103は、光束3の導光部400への入射光路中に配置され、対物レンズ101で集光された光束3を通過させる開口を備えるミラーである。対物レンズ101からの光束のうち、被測定物2の測光エリアからの光束はアパーチャーミラー103の前記開口を通過して後段の導光部400へ直進されるが、測光エリア外の光束についてはアパーチャーミラー103によって反射され、観察光学系200内の反射ミラー201及び観察リレーレンズ202を含むレンズ群を経て、使用者の瞳へ導かれる。使用者は、観察光学系200から、被測定物2と指標円(アパーチャーミラーで反射されない領域であり、使用者は黒色と見える)を視認し、測定位置合わせとピント合わせを行う。ピント合わせは対物レンズ101の全群または一部のレンズ群を移動させることで、アパーチャーミラー位置に焦点を合わせる。開口絞り102はピント合わせを行っても測定光の開口角(Fナンバー)は変化しない。なお、アパーチャーミラー103の穴サイズは手動又は自動で変更可能に構成されても良い。穴サイズを変更することで測定角(測定サイズ)の変更ができる。
アパーチャーミラー103は、光束3の導光部400への入射光路中に配置され、対物レンズ101で集光された光束3を通過させる開口を備えるミラーである。対物レンズ101からの光束のうち、被測定物2の測光エリアからの光束はアパーチャーミラー103の前記開口を通過して後段の導光部400へ直進されるが、測光エリア外の光束についてはアパーチャーミラー103によって反射され、観察光学系200内の反射ミラー201及び観察リレーレンズ202を含むレンズ群を経て、使用者の瞳へ導かれる。使用者は、観察光学系200から、被測定物2と指標円(アパーチャーミラーで反射されない領域であり、使用者は黒色と見える)を視認し、測定位置合わせとピント合わせを行う。ピント合わせは対物レンズ101の全群または一部のレンズ群を移動させることで、アパーチャーミラー位置に焦点を合わせる。開口絞り102はピント合わせを行っても測定光の開口角(Fナンバー)は変化しない。なお、アパーチャーミラー103の穴サイズは手動又は自動で変更可能に構成されても良い。穴サイズを変更することで測定角(測定サイズ)の変更ができる。
測定光学系300における導光部400は、アパーチャーミラー103の開口部を通過した光束を集光する集光レンズ401と、集光レンズ401を通過した光束を分光部500の入射スリット501へと導光するバンドルファイバー402を備えており、この実施形態ではバンドルファイバー402の出口と入射スリット501が入射部として共用されている。なお、バンドルファイバー402と入射スリット501は少なくとも一方のみであっても良い。
測定光学系300における分光部500は、入射スリット501から入射された光束を概ね平行光にするコリメータレンズ502と、コリメータレンズ502からの平行光の後方に配置された、矩形の開口部503aを有する絞り(図2~図4に示す)503と、絞り503の開口部503aを通過した平行光を回折させる回折格子504と、結像レンズ505と、受光センサである主センサ506と、主センサ506の一部前方に配置された2次光カットフィルター507等を備えている。
絞り503は、コリメータレンズ502からの平行光の光量を回折格子504の大きさに合わせて規制するものであり、結像レンズ505は回折格子504で波長分散された光線を主センサ506に結像させるものである。絞り503は、環境変化や経時変化に強いため信頼性が高く、光の波長依存、傾き(光線入射角度)依存等も受けない。
主センサ506は、限定はされないがラインセンサからなり、例えば380~780nmの波長範囲での受光が可能である。
絞り503は、コリメータレンズ502からの平行光の光量を回折格子504の大きさに合わせて規制するものであり、結像レンズ505は回折格子504で波長分散された光線を主センサ506に結像させるものである。絞り503は、環境変化や経時変化に強いため信頼性が高く、光の波長依存、傾き(光線入射角度)依存等も受けない。
主センサ506は、限定はされないがラインセンサからなり、例えば380~780nmの波長範囲での受光が可能である。
この実施形態では、コリメータレンズ502と絞り503の間の光路上に、他の光学系部品が介在配置されている。この実施形態では、光学系部品として受光光量調整部材の一つである光学フィルター、例えば赤外光をカットするための赤外光カットフィルター510と、赤外光カットフィルター510の後方に、同じく受光光量調整部材の一つである減光部材520が配置されている。なお、赤外光カットフィルター510と減光部材520はいずれか一方のみが配置されても良いし、両方共になくてもよい。また、減光部材520は1個であっても良いし複数個が同時に光路に配置されても良い。
減光部材520は、背景技術で説明したのと同様に、ダイナミックレンジの広い測定を可能にするために使用されるものであり、NDフィルター、液晶シャッター、拡散板等から構成される。減光部材520は駆動部521により光路に対して挿入可能でかつ退避可能に駆動されるようになっており、必要時のみに光路に挿入させてコリメータレンズ502からの被測定光を通過させるようになっている。
一方、赤外光カットフィルター510が用いられる場合は、定位置に固定され減光部材520のように挿入退避駆動されない。このため、減光部材520で生じることがある傾き再現性についての問題は生じない。なお、固定式の減光部材520を用いても良い。
さらにこの実施形態では、図2に示すように、分光部500には、受光センサからなる1個又は複数個の補助センサA、B、Cが設けられている。なお、以下の説明では、補助センサの配置位置に応じて、1個又は複数個のセンサをまとめて補助センサA、補助センサB、補助センサCと記す。また、複数の補助センサについて言及が必要なときは、補助センサA1~An、補助センサB1~Bn、補助センサC1~Cnと記す。
これらの補助センサA、B、Cには、シリコンフォトダイオード(SPD)等の環境温度や経時変化に強い信頼性の高いセンサが使用されている。この補助センサA、B、Cは、補助センサの出力値に基づいて主センサ506の出力値を補正するためのものであり、導光部400から分光部500に入射し主センサ506が受光する被測定光と同じ条件の光であるが、主センサ506に到達しない光束の光路に配置されている。
さらにこの実施形態では、図2に示すように、分光部500には、受光センサからなる1個又は複数個の補助センサA、B、Cが設けられている。なお、以下の説明では、補助センサの配置位置に応じて、1個又は複数個のセンサをまとめて補助センサA、補助センサB、補助センサCと記す。また、複数の補助センサについて言及が必要なときは、補助センサA1~An、補助センサB1~Bn、補助センサC1~Cnと記す。
これらの補助センサA、B、Cには、シリコンフォトダイオード(SPD)等の環境温度や経時変化に強い信頼性の高いセンサが使用されている。この補助センサA、B、Cは、補助センサの出力値に基づいて主センサ506の出力値を補正するためのものであり、導光部400から分光部500に入射し主センサ506が受光する被測定光と同じ条件の光であるが、主センサ506に到達しない光束の光路に配置されている。
例えば、図2に示す例では、コリメータレンズ502と赤外光カットフィルター510の間に1個又は複数個の補助センサAが配置され、減光部材520と絞り503の間に1個又は複数個の補助センサBが配置されている。分光部500へ入射された光束はコリメータレンズ502により平行とされ、回折格子504に照射されるが、コリメータレンズ502の光軸に対し回折格子504が傾斜しているため、コリメータレンズ502の通過光810のうち、絞り503の開口部503aを通過した一部の光束だけが被測定光820として絞り回折格子504に照射され、回折格子面を外れる光束は、図3及び図4に示すように絞り503で遮光され、主センサ506に到達しない。補助センサA、Bは、絞り503で遮光される光束、つまり主センサ506による測定に使用されておらず無駄となっている光束を受光可能な位置に配置される。
また、図2及び図4に示すように、回折格子504による回折0次光840を受光可能な位置に、1個又は複数個の補助センサCが配置されても良い。主センサ506による受光データ(回折-1次光830)と回折0次光840は、回折格子504で次数分割されたもので、同じ条件(被測定物2に依存する特徴が同じ)の光束である。回折-1次光830は分光データとして取得されるが、他の次数は測定に利用されない。換言すれば、遮光されており無駄となっている光束を補助センサCで受光する。回折0次光840は測定波長範囲380~780nmの全波長の情報を有し、光強度も強い。
また、図2及び図4に示すように、回折格子504による回折0次光840を受光可能な位置に、1個又は複数個の補助センサCが配置されても良い。主センサ506による受光データ(回折-1次光830)と回折0次光840は、回折格子504で次数分割されたもので、同じ条件(被測定物2に依存する特徴が同じ)の光束である。回折-1次光830は分光データとして取得されるが、他の次数は測定に利用されない。換言すれば、遮光されており無駄となっている光束を補助センサCで受光する。回折0次光840は測定波長範囲380~780nmの全波長の情報を有し、光強度も強い。
なお、補助センサA、B、Cの配置位置を図2及び図4のように3箇所例示したが、全ての位置に配置される必要はなく、後述する実施形態のように、補正処理に応じて必要な位置に配置すれば良い。
補助センサA、B、Cが1つでは、主センサ506による測定輝度範囲に対してダイナミックレンジが不足している場合等には、複数の補助センサA1~An、B1~Bn、C1~Cnを用いて、各補助センサでレンジ範囲を分担しても良い。図2に示す例では、コリメータレンズ502と赤外光カットフィルター510の間と、減光部材520と絞り503の間の各位置において、被測定光820の光路の周囲に、それぞれ複数個ずつの補助センサA1~An、B1~Bnがそれぞれ配置されている。また、これらの補助センサA1~An、B1~Bnのうちの少なくとも1個と、回折0次光840を受光可能な位置の補助センサC1~Cnの組み合わせであっても良い。
また、各補助センサA、B、Cによる受光量を制御するため、図2に示したように、補助センサA、B、Cの前段にメカ絞り部材530や光学フィルター(図示せず)を配置しても良い。
また、各補助センサA、B、Cによる受光量を制御するため、図2に示したように、補助センサA、B、Cの前段にメカ絞り部材530や光学フィルター(図示せず)を配置しても良い。
図1に示す処理回路600は、主センサ506による受光データや、補助センサA、B、Cによる受光データをAD変換等する回路であり、補正部700は、補助センサA、B、Cの出力値に基づいて、主センサ506の出力値を補正するものである。補正は、主センサ506の出力値から演算した受光強度値が、補助センサA、B、Cの出力値から演算した受光強度値と同じになるように行われる。
次に、補正部700において実行される、補助センサA、B、Cの出力値に基づく主センサ506の出力値の具体的な補正処理について説明する。
[実施形態1]
この実施形態では、図5に示すように、赤外光カットフィルター510の前方、換言すればコリメータレンズ502と赤外光カットフィルター510の間に補助センサAを配置する。減光部材520の有無は問わないが、この実施形態ではないものとする。補助センサAは1個でも良いし、この実施形態のようにダイナミックレンジに対応する複数個の補助センサA1~Anを使用しても良い。補助センサA1~Anには光学フィルターを装備し、計算を容易にするため、受光感度を標準視感度(Vλ)とする。なお、標準視感度(Vλ)以外の感度であっても良いし、光学フィルターが装備されていなくても良い。また、補助センサAの受光値と輝度値(Lv)のテーブルを有している。
この実施形態では、図5に示すように、赤外光カットフィルター510の前方、換言すればコリメータレンズ502と赤外光カットフィルター510の間に補助センサAを配置する。減光部材520の有無は問わないが、この実施形態ではないものとする。補助センサAは1個でも良いし、この実施形態のようにダイナミックレンジに対応する複数個の補助センサA1~Anを使用しても良い。補助センサA1~Anには光学フィルターを装備し、計算を容易にするため、受光感度を標準視感度(Vλ)とする。なお、標準視感度(Vλ)以外の感度であっても良いし、光学フィルターが装備されていなくても良い。また、補助センサAの受光値と輝度値(Lv)のテーブルを有している。
この実施形態では、補助センサA1~Anのいずれかである補助センサAxで輝度の絶対値を取得し、主センサ506の出力値のレベルを補正する。補助センサAxと主センサ506により光束を同時に受光して測定する。
図6に測定手順のフローチャートを示す。
測定が開始されると、事前測定として、ステップS101で、複数の補助センサA1~Anの受光データを処理回路600でAD変換して測定データ(受光データ)を取得する。次にステップS102で、複数の補助センサA1~Anの中から感度の最適な補助センサAxを選択し、補助センサAxの出力値から、被測定物2の輝度概算値(Lv0)を算出する。輝度概算値(Lv0)の算出は補助センサAxの出力値と輝度値(Lv)のテーブルから、補助センサAxの出力値に対応する輝度値を求めることにより行われる。さらに、算出された輝度概算値(Lv0)の値から、補助センサA1~Anの中から本測定で使用する補助センサAxを決定する。通常は、選択された補助センサAxが本測定でも使用される。さらに、本測定での主センサ506及び補助センサAxの測定時間(蓄積時間)を決定する。
次に、ステップS103で本測定を行う。具体的には、主センサ506の出力値と補助センサAxの出力値を同時に取得する。
次いで、以下の補正演算処理を行う。先ずステップS104で、補助センサAxの出力値から、被測定物の輝度(Lv1)を算出する。算出は、補助センサAxの、出力値と輝度値のテーブルを基に行う。
次にステップS105で、主センサ506の出力値から分光放射輝度データを算出する。分光放射輝度データの横軸は画素と波長のテーブルから、縦軸は出力値と分光放射輝度のテーブルから算出する。そして、算出した分光放射輝度データから、輝度(Lv2)を算出する。
ステップS106では、ステップS104で算出した輝度(Lv1)とステップS105で算出した輝度(Lv2)から、補正係数=Lv1÷Lv2を算出したのち、ステップS107で、分光放射輝度データを全波長に亘って補正係数で補正(補正係数を乗算)する。そして、ステップS108で、補正後の分光放射輝度データを表示装置等に出力する。
このように、この実施形態では、赤外光カットフィルター510の前方に配置された補助センサAxの出力値に基づいて、主センサ506の出力値が補正されるから、補助センサ506の後方に存在する赤外光カットフィルター510の透過率が環境条件や経時劣化等によって変化していた場合や、或いは主センサ506の精度が変化していた場合であっても、適正に補正されて精度の高い測定を行うことができる。しかも、補助センサAは、主センサ506に到達しない光束の光路に配置されているから、主センサ506による測定に影響を及ぼすことなく、主センサ506の出力値を補正することができる。
なお、赤外光カットフィルター510が存在せず、固定の減光部材520が備えられている場合や、赤外光カットフィルター510の後方に固定の減光部材520が配置されている場合に、実施形態1を適用しても良い。減光部材520が存在している場合は、減光部材520の透過率も合わせて補償される。
[実施形態2]
この実施形態では、図7に示すように、被測定光820の光路に対して挿入退避可能に駆動される減光部材520の前方に補助センサAを配置する。補助センサAは1個でも良いし、この実施形態のように、ダイナミックレンジに対応する複数個の補助センサA1~Anを使用しても良い。赤外光カットフィルター510の有無は問わないが、この実施形態ではないものとする。補助センサAには光学フィルターを装備し、計算を容易にするため、受光感度を標準視感度(Vλ)とする。なお、標準視感度(Vλ)以外の感度であっても良いし、光学フィルターが装備されていなくても良い。また、補助センサAの受光値と輝度値(Lv)のテーブルを有している。
この実施形態では、図7に示すように、被測定光820の光路に対して挿入退避可能に駆動される減光部材520の前方に補助センサAを配置する。補助センサAは1個でも良いし、この実施形態のように、ダイナミックレンジに対応する複数個の補助センサA1~Anを使用しても良い。赤外光カットフィルター510の有無は問わないが、この実施形態ではないものとする。補助センサAには光学フィルターを装備し、計算を容易にするため、受光感度を標準視感度(Vλ)とする。なお、標準視感度(Vλ)以外の感度であっても良いし、光学フィルターが装備されていなくても良い。また、補助センサAの受光値と輝度値(Lv)のテーブルを有している。
この実施形態では、実施形態1と同様に、補助センサAで輝度の絶対値を取得し、主センサの出力値のレベルを補正する。補助センサAと主センサ506により光束を同時に受光して測定する。
図8に測定手順のフローチャートを示す。
測定が開始されると、減光部材520を被測定光820の光路から退避させた状態で、事前測定を行う。即ち、ステップS201で、複数の補助センサA1~Anの受光データを処理回路600でAD変換して測定データを取得する。次にステップS202で、複数の補助センサA1~Anの中から感度の最適な補助センサAxを選択し、補助センサAxの出力値から、被測定物2の輝度概算値(Lv0)を算出する。輝度概算値(Lv0)の算出は補助センサAxの出力値と輝度値(Lv)のテーブルから、補助センサAxの出力値に対応する輝度値を求めることにより行われる。さらに、算出された輝度概算値(Lv0)の値から、本測定での減光部材520の使用の有無、使用する場合の個数を決定するとともに、補助センサA1~Anの中から本測定で使用する補助センサAxを決定する。通常は、選択された補助センサAxが本測定でも使用される。さらに、本測定での主センサ506及び補助センサAxの測定時間(蓄積時間)を決定する。
次に、本測定を行う。減光部材520を使用しないことが決定された場合、減光部材520を光路から退避させたまま、ステップS204に進む。減光部材520を使用することが決定された場合、ステップS203で、決定された個数の減光部材520を光路に挿入したのち、ステップS204に進む。
ステップS204では、主センサ506の出力値と補助センサAxの出力値を同時に取得する。
ステップS204では、主センサ506の出力値と補助センサAxの出力値を同時に取得する。
次いで、ステップS205~S208の補正演算処理、ステップS209の結果出力処理を行うが、これらの処理は、実施形態1で説明した図6のステップS104~S107の補正演算処理、ステップS108の結果出力処理と同じであるので、説明は省略する。
このように、この実施形態では、減光部材520が被測定光820の光路に挿入されていない場合は、主センサ506の精度変化等を補償でき、減光部材520が光路に挿入されている場合は、主センサ506の精度変化に加えて減光部材520の透過率変化等を補償でき、精度の高い測定を行うことができる。なお、補助センサAxの後方に赤外カットフィルター510が存在している場合は、赤外カットフィルター510の透過率変化等と減光部材520の透過率変化等を合わせて補償できる。
[実施形態3]
この実施形態では、図9に示すように、被測定光820の光路に対して挿入退避可能に駆動される減光部材520の後方、換言すれば減光部材520と絞り503の間に補助センサBを配置するか、回折0次光840を受光する補助センサCを配置するが、この例では補助センサBを使用する。補助センサBは1個でも良いし、この実施形態のように、ダイナミックレンジに対応する複数個の補助センサB1~Bnを使用しても良い。赤外光カットフィルター510の有無は問わないが、この実施形態ではないものとする。補助センサBには光学フィルターを装備し、計算を容易にするため、受光感度を標準視感度(Vλ)とする。なお、標準視感度(Vλ)以外の感度であっても良いし、光学フィルターが装備されていなくても良い。また、補助センサBの受光値と輝度値(Lv)のテーブルを有している。
この実施形態では、図9に示すように、被測定光820の光路に対して挿入退避可能に駆動される減光部材520の後方、換言すれば減光部材520と絞り503の間に補助センサBを配置するか、回折0次光840を受光する補助センサCを配置するが、この例では補助センサBを使用する。補助センサBは1個でも良いし、この実施形態のように、ダイナミックレンジに対応する複数個の補助センサB1~Bnを使用しても良い。赤外光カットフィルター510の有無は問わないが、この実施形態ではないものとする。補助センサBには光学フィルターを装備し、計算を容易にするため、受光感度を標準視感度(Vλ)とする。なお、標準視感度(Vλ)以外の感度であっても良いし、光学フィルターが装備されていなくても良い。また、補助センサBの受光値と輝度値(Lv)のテーブルを有している。
この実施形態では、実施形態1と同様に、補助センサBで輝度の絶対値を取得し、主センサ506の出力値のレベルを補正する。減光部材520が使用される場合、減光部材520を被測定光820の光路に挿入した状態で主センサ506の出力値を取得し、光路から退避させた状態で補助センサBの出力値を取得する。
図10に測定手順のフローチャートを示す。
測定が開始されると、減光部材520を被測定光820の光路から退避させた状態で事前測定を行う。即ち、ステップS301で、複数の補助センサB1~Bnの受光データを処理回路600でAD変換して測定データを取得する。次にステップS302で、複数の補助センサB1~Bnの中から感度の最適な補助センサBxを選択し、補助センサBxの出力値から、被測定物2の輝度概算値(Lv0)を算出する。輝度概算値(Lv0)の算出は補助センサBxの出力値と輝度値(Lv)のテーブルから、補助センサBxの出力値に対応する輝度値を求めることにより行われる。さらに、算出された輝度概算値(Lv0)の値から、本測定での減光部材520の使用の有無、使用する場合の個数を決定するとともに、補助センサB1~Bnの中から本測定で使用する補助センサBxを決定する。通常は、選択された補助センサBxが本測定でも使用される。さらに、本測定での主センサ506及び補助センサBxの測定時間(蓄積時間)を決定する。
次に、本測定を行う。減光部材520を使用しないことが決定された場合、減光部材520を光路から退避させたまま、ステップS303で、主センサ506の出力値と補助センサBxの出力値を同時に取得した後、ステップS308に進む。減光部材520を使用することが決定された場合、ステップS304で、決定された個数の減光部材520を被測定光820の光路に挿入したのち、ステップS305で、主センサ506の出力値を取得する。次にステップS306で減光部材520を光路から退避させた後、ステップS307で補助センサBxの出力値を取得し、ステップS308に進む。
次いで、ステップS308~S311の補正演算処理、ステップS312の結果出力処理を行うが、これらの処理は、ステップS308での被測定物2の輝度(Lv1)の算出を補助センサBxの出力値を用いて行う点を除いて、実施形態1で説明した図7のステップS104~S107の補正演算処理、ステップS108の結果出力処理と同じであるので、説明は省略する。
このように、この実施形態では、補助センサBを減光部材520の後方に配置し、減光部材520が被測定光820の光路から退避した状態で取得された補助センサBの出力値により、減光部材520が光路に挿入されている状態で取得された主センサ506の出力値を補正するから、減光部材520の透過率変化や主センサ506の精度変化等を補償でき、精度の高い測定を行うことができる。なお、赤外光カットフィルター510が存在している場合は、赤外光カットフィルター510の透過率変化等を含めて補償することができる。
[実施形態4]
この実施形態では、図11に示すように、被測定光820の光路に対して進退可能に駆動される減光部材520の後方、換言すれば減光部材520と絞り503の間に補助センサBを配置するか、回折0次光840を受光する補助センサCを配置するが、この例では回折0次光を受光する補助センサCを使用するものとする。補助センサCは1個でも良いし、この実施形態のように、ダイナミックレンジに対応する複数個の補助センサC1~Cnを使用しても良い。また、減光部材520の前方に配置された1個または複数個の補助センサAも使用する。赤外光カットフィルター510の有無は問わないが、この実施形態ではないものとする。各補助センサC1~Cn、Aには光学フィルターを装備し、計算を容易にするため、受光感度を標準視感度(Vλ)とする。なお、標準視感度(Vλ)以外の感度であっても良いし、光学フィルターが装備されていなくても良い。また、補助センサCの受光値と輝度値(Lv)のテーブルを有している。
この実施形態では、図11に示すように、被測定光820の光路に対して進退可能に駆動される減光部材520の後方、換言すれば減光部材520と絞り503の間に補助センサBを配置するか、回折0次光840を受光する補助センサCを配置するが、この例では回折0次光を受光する補助センサCを使用するものとする。補助センサCは1個でも良いし、この実施形態のように、ダイナミックレンジに対応する複数個の補助センサC1~Cnを使用しても良い。また、減光部材520の前方に配置された1個または複数個の補助センサAも使用する。赤外光カットフィルター510の有無は問わないが、この実施形態ではないものとする。各補助センサC1~Cn、Aには光学フィルターを装備し、計算を容易にするため、受光感度を標準視感度(Vλ)とする。なお、標準視感度(Vλ)以外の感度であっても良いし、光学フィルターが装備されていなくても良い。また、補助センサCの受光値と輝度値(Lv)のテーブルを有している。
この実施形態では、実施形態1と同様に、補助センサCで輝度の絶対値を取得し、主センサ506の出力値のレベルを補正する。また、補助センサAにより時間変化を補正する。
図12に測定手順のフローチャートを示す。
測定が開始されると、減光部材520を被測定光820の光路から退避させた状態で、事前測定を行う。即ち、ステップS401で、複数の補助センサC1~Cnの受光データを処理回路600でAD変換して測定データを取得する。次にステップS402で、複数の補助センサC1~Cnの中から感度の最適な補助センサCxを選択し、補助センサCxの出力値から、被測定物2の輝度概算値(Lv0)を算出する。輝度概算値(Lv0)の算出は補助センサCxの出力値と輝度値(Lv)のテーブルから、補助センサCxの出力値に対応する輝度値を求めることにより行われる。さらに、算出された輝度概算値(Lv0)の値から、本測定での減光部材520の使用の有無、使用する場合の個数を決定するとともに、補助センサA1~Anの中から本測定で使用する補助センサAxを決定し、補助センサC1~Cnの中から補助センサCxを決定する。通常は、選択された補助センサCxが本測定でも使用される。さらに、本測定での主センサ506、補助センサAx及び補助センサCxの測定時間(蓄積時間)を決定する。
次に、本測定を行う。減光部材520を使用しないことが決定された場合、減光部材520を被測定光820の光路から退避させたまま、ステップS403で、主センサ506の出力値と補助センサCxの出力値を同時に取得した後、ステップS408に進む。減光部材520を使用することが決定された場合、ステップS404で、決定された個数の減光部材520を光路に挿入したのち、ステップS405で、主センサ506の出力値と補助センサAxの出力値a1を同時に取得する。次にステップS406で減光部材520を光路から退避させた後、ステップS407で、補助センサAxの出力値a2と補助センサCxの出力値bを同時に取得し、ステップS408に進む。
次いで、以下の補正演算処理を行う。先ずステップS408で、補助センサCxの出力値から、被測定物の輝度(Lv1)を算出する。算出は、補助センサCxの、出力値と輝度値のテーブルを基に行う。
次に、減光部材520を使用しない場合はステップS411に進む。一方、減光部材520を使用する場合は、ステップS409で、補助センサAxの出力値a1およびa2から、出力値a1とa2の比である時間差計数を算出し、ステップS410で、Lv1’=Lv1×時間差計数、を演算した後、ステップS411に進む。
ステップS411では、主センサ506の出力値から分光放射輝度データを算出するとともに、算出した分光放射輝度データから輝度(Lv2)を算出する。
次に、減光部材520を使用しない場合は、ステップS412で、補正係数=Lv1÷Lv2を算出したのち、ステップS414に進む。一方、減光部材520を使用する場合は、ステップS413で、補正係数=Lv1’÷Lv2を算出したのち、ステップS414に進む。
ステップS414では、分光放射輝度データを全波長に亘って、各補正係数で補正する。そして、ステップS415で、補正後の分光放射輝度データを出力する。
このように、この実施形態では、減光部材520が被測定光820の光路から退避した状態で取得された補助センサCxの出力値により、減光部材520が光路に挿入されている状態で取得された主センサ506の出力値を補正するとともに、補助センサCxの取得タイミングと主センサ506の出力値の取得タイミングの相違による時間的な光量変化を、それぞれのタイミングで測定した補助センサAxの出力値a1とびa2の比である時間差計数(時間的な光量変化率)により補正するから、より精度の高い測定を行うことができる。なお、補助センサAxの後方に赤外カットフィルター510が存在している場合は、赤外カットフィルター510の透過率変化等と減光部材520の透過率変化等を合わせて補償できる。
[実施形態5]
この実施形態では、図13に示すように、コリメータレンズ502と赤外光カットフィルター510の間に補助センサAを配置し、赤外光カットフィルター510の後方に1個の補助センサBを配置する。減光部材520の有無は問わないが、この実施形態ではないものとする。補助センサAは1個でも良いし、この実施形態のように、ダイナミックレンジに対応する複数個の補助センサA1~Anを使用しても良い。後方の補助センサBは、減光部材520の通過後なので、適正光量に設定されたものを使用する。なお、補助センサBの代わりに、回折0次光を受光する1個の補助センサCを使用しても良い。
補助センサA1~Anには光学フィルターを装備し、計算を容易にするため、受光感度を標準視感度(Vλ)とする。なお、標準視感度(Vλ)以外の感度であっても良いし、光学フィルターが装備されていなくても良い。また、補助センサAの受光値と輝度値(Lv)のテーブルを有している。さらに、工場出荷時に、補助センサAと補助センサB(補助センサCを用いる場合は補助センサC)の出力値比の基準値(基準の補助センサ比という)が記憶されている。
この実施形態では、図13に示すように、コリメータレンズ502と赤外光カットフィルター510の間に補助センサAを配置し、赤外光カットフィルター510の後方に1個の補助センサBを配置する。減光部材520の有無は問わないが、この実施形態ではないものとする。補助センサAは1個でも良いし、この実施形態のように、ダイナミックレンジに対応する複数個の補助センサA1~Anを使用しても良い。後方の補助センサBは、減光部材520の通過後なので、適正光量に設定されたものを使用する。なお、補助センサBの代わりに、回折0次光を受光する1個の補助センサCを使用しても良い。
補助センサA1~Anには光学フィルターを装備し、計算を容易にするため、受光感度を標準視感度(Vλ)とする。なお、標準視感度(Vλ)以外の感度であっても良いし、光学フィルターが装備されていなくても良い。また、補助センサAの受光値と輝度値(Lv)のテーブルを有している。さらに、工場出荷時に、補助センサAと補助センサB(補助センサCを用いる場合は補助センサC)の出力値比の基準値(基準の補助センサ比という)が記憶されている。
この実施形態では、赤外光カットフィルター510の前方の補助センサA1~Anと後方の補助センサBの基準の補助センサ比に基づいて、赤外光カットフィルター510の透過率の工場出荷時からの変化を補償するものである。
図14に測定手順のフローチャートを示す。
測定が開始されると、事前測定として、ステップS501で、複数の補助センサA1~Anの受光データを処理回路600でAD変換して測定データを取得する。次にステップS502で、複数の補助センサA1~Anの中から感度の最適な補助センサAxを選択し、補助センサAxの出力値から、被測定物2の輝度概算値(Lv0)を算出する。輝度概算値(Lv0)の算出は補助センサAxの出力値と輝度値(Lv)のテーブルから、補助センサAxの出力値に対応する輝度値を求めることにより行われる。さらに、算出された輝度概算値(Lv0)の値から、補助センサA1~Anの中から本測定で使用する補助センサAxを決定する。通常は、選択された補助センサAxが本測定でも使用される。さらに、本測定での主センサ506、補助センサAx及び補助センサBの測定時間(蓄積時間)を決定する。
次に、ステップS503で本測定を行う。具体的には、主センサ506、補助センサAx及び補助センサBの各出力値を同時に取得する。
次いで、以下の補正演算処理を行う。先ずステップS504で、補助センサ比=補助センサBの出力値÷補助センサAxの出力値、を算出したのち、ステップS505で、変化率=演算した補助センサ比÷工場出荷時の基準の補助センサ比、を算出する。
次いで、ステップS506で、主センサ506の出力値から分光放射輝度データを算出する。分光放射輝度データの横軸は画素と波長のテーブルから、他と軸は出力値と分光放射輝度のテーブルから算出する。そして、算出した分光放射輝度データから、輝度(Lv2)を算出する。
ステップS507では、分光放射輝度データを全波長に亘って、ステップS505で算出した変化率で補正する。そして、ステップS108で、補正後の分光放射輝度データを出力する。
このように、この実施形態では、赤外光カットフィルター510の前方の補助センサAxと後方の補助センサBの出力値に基づいて、赤外光カットフィルター510の透過率等の工場出荷時からの変化が変化率によって是正され、この変化率で主センサ506の出力値が補正されるから、赤外光カットフィルター510の透過率等が環境条件や経時劣化等によって変化していた場合であっても、精度の高い測定を行うことができる。なお、赤外光カットフィルター510が存在せず、固定の減光部材520が備えられている場合は、減光部材520の透過率の変化を補償することができる。また、補助センサA1~Anと補助センサBの間に、赤外光カットフィルター510と減光部材520の両方が存在する場合は、赤外光カットフィルター510と減光部材520を合わせた全体の透過率等の変化を補償することができる。
[実施形態6]
この実施形態では、図15に示すように、被測定光820の被測定光820の光路に対して進退可能に駆動される減光部材520の前方に補助センサAを配置し、さらに回折0次光840を受光する1個の補助センサCを配置する。補助センサAは1個でも良いし、この実施形態のように、ダイナミックレンジに対応する複数個の補助センサA1~Anを使用しても良い。補助センサCは、減光部材520の通過後なので、適正光量に設定されたものを使用する。なお、補助センサCの代わりに、減光部材520と絞り503の間に配置された補助センサBを使用しても良い。なお、赤外光カットフィルター510の有無は問わないが、この実施形態ではないものとする。
補助センサAには光学フィルターを装備し、計算を容易にするため、受光感度を標準視感度(Vλ)とする。なお、標準視感度(Vλ)以外の感度であっても良いし、光学フィルターが装備されていなくても良い。また、補助センサAの受光値と輝度値(Lv)のテーブルを有している。さらに、工場出荷時に、補助センサA及びCの出力値比の基準値(基準の補助センサ比)が記憶されている。
この実施形態では、図15に示すように、被測定光820の被測定光820の光路に対して進退可能に駆動される減光部材520の前方に補助センサAを配置し、さらに回折0次光840を受光する1個の補助センサCを配置する。補助センサAは1個でも良いし、この実施形態のように、ダイナミックレンジに対応する複数個の補助センサA1~Anを使用しても良い。補助センサCは、減光部材520の通過後なので、適正光量に設定されたものを使用する。なお、補助センサCの代わりに、減光部材520と絞り503の間に配置された補助センサBを使用しても良い。なお、赤外光カットフィルター510の有無は問わないが、この実施形態ではないものとする。
補助センサAには光学フィルターを装備し、計算を容易にするため、受光感度を標準視感度(Vλ)とする。なお、標準視感度(Vλ)以外の感度であっても良いし、光学フィルターが装備されていなくても良い。また、補助センサAの受光値と輝度値(Lv)のテーブルを有している。さらに、工場出荷時に、補助センサA及びCの出力値比の基準値(基準の補助センサ比)が記憶されている。
この実施形態では、減光部材520の前方の補助センサA1~Anと後方の補助センサCの基準の補助センサ比に基づいて、減光部材520の透過率の工場出荷時からの変化を補償するものである。
図16に測定手順のフローチャートを示す。
測定が開始されると、事前測定として、ステップS601で、複数の補助センサA1~Anの受光データを処理回路600でAD変換して測定データを取得する。次にステップS602で、複数の補助センサA1~Anの中から感度の最適な補助センサAxを選択し、補助センサAxの出力値から、被測定物2の輝度概算値(Lv0)を算出する。輝度概算値(Lv0)の算出は補助センサAxの出力値と輝度値(Lv)のテーブルから、補助センサAxの出力値に対応する輝度値を求めることにより行われる。さらに、算出された輝度概算値(Lv0)の値から、本測定での減光部材520の使用の有無、使用する場合の個数を決定するとともに、補助センサA1~Anの中から本測定で使用する補助センサAxを決定する。通常は、選択された補助センサAxが本測定でも使用される。さらに、本測定での主センサ506、補助センサAx及び補助センサCの測定時間(蓄積時間)を決定する。
次に、本測定を行う。減光部材520を使用しないことが決定された場合、減光部材520を被測定光820の光路から退避させたまま、図6のステップS103~S108の処理を行う。減光部材520を使用することが決定された場合、ステップS603で、決定された個数の減光部材520を光路に挿入したのち、ステップS604に進む。
ステップS604では、主センサ506、補助センサAx及び補助センサCの各出力値を同時に取得する。
次いで、ステップS605~S608の補正演算処理、ステップS609の結果出力処理を行うが、これらの処理は、ステップS605での補助センサ比の算出を補助センサBに代えて補助センサCの出力値を用いて行う点を除いて、実施形態5で説明した図11のステップS504~S507の補正演算処理、ステップS508の結果出力処理と同じであるので、説明は省略する。
このように、この実施形態では、減光部材520の前方に配置された補助センサAxと後方の補助センサCの出力値に基づいて、減光部材520の透過率等の工場出荷時からの変化が変化率によって是正され、この変化率で主センサ506の出力値が補正されるから、減光部材520の透過率等が環境条件や経時劣化等によって変化していた場合であっても、精度の高い測定を行うことができる。なお、補助センサAxと減光部材520の間に赤外光カットフィルター510が存在している場合は、赤外光カットフィルター510と減光部材520を合わせた透過率等の変化を補償することができる。
[実施形態7]
この実施形態では、図17に示すように、被測定光820の光路に対して進退可能に駆動される減光部材520の後方に補助センサBを配置する。補助センサBは1個でも良いし、この実施形態のように、ダイナミックレンジに対応する複数個の補助センサB1~Bnを使用しても良い。なお、補助センサBの代わりに、回折0次光840を受光する補助センサCを使用しても良い。なお、赤外光カットフィルター510の有無は問わないが、この実施形態ではないものとする。
補助センサBには光学フィルターを装備し、計算を容易にするため、受光感度を標準視感度(Vλ)とする。なお、標準視感度(Vλ)以外の感度であっても良いし、光学フィルターが装備されていなくても良い。また、補助センサBの受光値と輝度値(Lv)のテーブルを有している。
この実施形態では、図17に示すように、被測定光820の光路に対して進退可能に駆動される減光部材520の後方に補助センサBを配置する。補助センサBは1個でも良いし、この実施形態のように、ダイナミックレンジに対応する複数個の補助センサB1~Bnを使用しても良い。なお、補助センサBの代わりに、回折0次光840を受光する補助センサCを使用しても良い。なお、赤外光カットフィルター510の有無は問わないが、この実施形態ではないものとする。
補助センサBには光学フィルターを装備し、計算を容易にするため、受光感度を標準視感度(Vλ)とする。なお、標準視感度(Vλ)以外の感度であっても良いし、光学フィルターが装備されていなくても良い。また、補助センサBの受光値と輝度値(Lv)のテーブルを有している。
この実施形態では、減光部材520の光路への挿入時と退避時の補助センサBの出力値比から、減光部材520の減光率を求めて補正を行うものである。
図18に測定手順のフローチャートを示す。
測定が開始されると、減光部材520を被測定光820の光路から退避させた状態で、事前測定を行う。即ち、ステップS701で、複数の補助センサB1~Bnの受光データを処理回路600でAD変換して測定データを取得する。次にステップS702で、複数の補助センサB1~Bnの中から感度の最適な補助センサBxを選択する。さらに、補助センサBxの出力値から、本測定での減光部材520の使用の有無、使用する場合の個数を決定するとともに、補助センサB1~Bnの中から本測定で使用する、減光部材ありの時の補助センサBxと、減光部材なしの時の補助センサByとを決定する。補助センサBxと補助センサByは同じであっても良い。さらに、本測定での主センサ506、補助センサBx及び補助センサByの測定時間(蓄積時間)を決定する。
次に、本測定を行う。減光部材520を使用しないことが決定された場合、減光部材520を被測定光820の光路から退避させたまま、図6のステップS103~S108の処理を行う。ただし、ステップS103及びS104の「補助センサAx」は「補助センサBx」と置き換える。
減光部材520を使用することが決定された場合、ステップS704で、決定された個数の減光部材520を光路に挿入したのち、ステップS705で、主センサ506の出力値と補助センサBxの出力値αを同時に取得する。次にステップS706で減光部材520を光路から退避させた後、ステップS707で、補助センサByの出力値βを取得する。
次いで、以下の補正演算処理を行う。まずステップS708で、減光率=出力値α÷βを算出した後、ステップS709に進む。ステップS709では、主センサ506の出力値から分光放射輝度データを算出する。そして、算出した分光放射輝度データから、輝度(Lv2)を算出する。
次いで、以下の補正演算処理を行う。まずステップS708で、減光率=出力値α÷βを算出した後、ステップS709に進む。ステップS709では、主センサ506の出力値から分光放射輝度データを算出する。そして、算出した分光放射輝度データから、輝度(Lv2)を算出する。
ステップS710では、分光放射輝度データを全波長に亘って、ステップS708で算出した減光率で補正する。そして、ステップS711で、補正後の分光放射輝度データを出力する。
このように、この実施形態では、減光部材520の後方に配置された補助センサBx、Byの出力値に基づいて、減光部材520の減光率が求められ、透過率等の変化が減光率によって是正され、この減光率で主センサの出力値が補正されるから、減光部材520の透過率等が環境条件や経時劣化等によって変化していた場合であっても、精度の高い測定を行うことができる。
[実施形態8]
この実施形態では、図19に示すように、被測定光820の光路に対して進退可能に駆動される減光部材520と絞り503の間に補助センサBを配置するか、回折0次光840を受光する補助センサCを配置するが、この例では回折0次光840を受光する補助センサCを使用するものとする。補助センサCは1個でも良いし、この実施形態のように、ダイナミックレンジに対応する複数個の補助センサC1~Cnを使用しても良い。また、減光部材520の前方に配置された1個または複数個の補助センサA1~Anも使用する。赤外光カットフィルター510の有無は問わないが、この実施形態ではないものとする。
補助センサCには光学フィルターを装備し、計算を容易にするため、受光感度を標準視感度(Vλ)とする。なお、標準視感度(Vλ)以外の感度であっても良いし、光学フィルターが装備されていなくても良い。また、補助センサCの受光値と輝度値(Lv)のテーブルを有している。
この実施形態では、図19に示すように、被測定光820の光路に対して進退可能に駆動される減光部材520と絞り503の間に補助センサBを配置するか、回折0次光840を受光する補助センサCを配置するが、この例では回折0次光840を受光する補助センサCを使用するものとする。補助センサCは1個でも良いし、この実施形態のように、ダイナミックレンジに対応する複数個の補助センサC1~Cnを使用しても良い。また、減光部材520の前方に配置された1個または複数個の補助センサA1~Anも使用する。赤外光カットフィルター510の有無は問わないが、この実施形態ではないものとする。
補助センサCには光学フィルターを装備し、計算を容易にするため、受光感度を標準視感度(Vλ)とする。なお、標準視感度(Vλ)以外の感度であっても良いし、光学フィルターが装備されていなくても良い。また、補助センサCの受光値と輝度値(Lv)のテーブルを有している。
この実施形態では、減光部材520の被測定光820の光路への挿入時と退避時の補助センサCの出力値比から、減光部材520の減光率を求めて補正を行うものである。また、補助センサAにより時間変化を補正する。
図20に測定手順のフローチャートを示す。
測定が開始されると、減光部材520を被測定光820の光路から退避させた状態で、事前測定を行う。即ち、ステップS801で、複数の補助センサC1~Cnの受光データを処理回路600でAD変換して測定データを取得する。次にステップS802で、複数の補助センサC1~Cnの中から感度の最適な補助センサCxを選択する。さらに、補助センサCxの出力値から、本測定での減光部材520の使用の有無、使用する場合の個数を決定するとともに、補助センサA1~Anの中から本測定で使用する補助センサAxを決定し、補助センサC1~Cnの中から本測定で使用する、減光部材ありの時の補助センサCxと、減光部材なしの時の補助センサCyとを決定する。補助センサCxと補助センサCyは同じであっても良い。さらに、本測定での主センサ506、補助センサAx、補助センサCx及び補助センサCyの測定時間(蓄積時間)を決定する。
次に、本測定を行う。減光部材520を使用しないことが決定された場合、減光部材520を被測定光820の光路から退避させたまま、図6のステップS103~S108の処理を行う。ただし、ステップS103及びS104の「補助センサAx」は「補助センサCx」と置き換える。
減光部材520を使用することが決定された場合、ステップS804で、決定された個数の減光部材520を光路に挿入したのち、ステップS805で、主センサ506の出力値と、補助センサAxの出力値aと、補助センサCxの出力値αを同時に取得する。次にステップS806で減光部材520を光路から退避させた後、ステップS807で、補助センサAxの出力値bと、補助センサCyの出力値βを同時に取得する。
減光部材520を使用することが決定された場合、ステップS804で、決定された個数の減光部材520を光路に挿入したのち、ステップS805で、主センサ506の出力値と、補助センサAxの出力値aと、補助センサCxの出力値αを同時に取得する。次にステップS806で減光部材520を光路から退避させた後、ステップS807で、補助センサAxの出力値bと、補助センサCyの出力値βを同時に取得する。
次いで、以下の補正演算処理を行う。まずステップS808で、補助センサAxの出力値aとbから、これらの比である時間差計数を算出し、ステップS809で、減光率=出力値α÷β×時間差係数、を算出した後、ステップS810に進む。
ステップS810では、主センサ506の出力値から分光放射輝度データを算出する。そして、算出した分光放射輝度データから、輝度(Lv2)を算出する。
ステップS810では、主センサ506の出力値から分光放射輝度データを算出する。そして、算出した分光放射輝度データから、輝度(Lv2)を算出する。
ステップS811では、分光放射輝度データを全波長に亘って、ステップS809で算出した減光率で補正する。そして、ステップS812で、補正後の分光放射輝度データを出力する。
このように、この実施形態では、減光部材520の後方に配置された補助センサCx、Cyの出力値に基づいて、減光部材520の減光率が求められ、透過率等の変化が減光率によって是正され、この減光率で主センサ506の出力値が補正されるから、減光部材520の透過率等が環境条件や経時劣化等によって変化していた場合であっても、精度の高い測定を行うことができる。しかも、減光率は、異なるタイミングで測定した補助センサAxの出力値aとbの比である時間差係数により時間的な光量変化が補正されるから、より精度の高い測定を行うことができる。
本発明は、光源の輝度や色度、物体の分光反射率や色彩値等を測定する際に利用可能である。
1 分光測定器
2 測定対象物
3 被測定光
100 受光光学系
200 観察光学系
300 測定光学系
400 導光部
402 バンドルファイバー
500 分光部
501 入射スリット
502 コリメータレンズ
503 絞り
503a開口部
504 回折格子
506 主センサ
510 赤外光カットフィルター
520 減光部材
600 処理回路
700 補正部
810 コリメータレンズの通過光
820 被測定光
840 回折0次光
A~C、A1~An、B1~Bn、C1~Cn 補助センサ
2 測定対象物
3 被測定光
100 受光光学系
200 観察光学系
300 測定光学系
400 導光部
402 バンドルファイバー
500 分光部
501 入射スリット
502 コリメータレンズ
503 絞り
503a開口部
504 回折格子
506 主センサ
510 赤外光カットフィルター
520 減光部材
600 処理回路
700 補正部
810 コリメータレンズの通過光
820 被測定光
840 回折0次光
A~C、A1~An、B1~Bn、C1~Cn 補助センサ
Claims (16)
- 入射部から入射した被測定光を回折させる回折手段と、
前記回折手段で回折された被測定光を受光する主センサと、
前記入射部から入射した光束のうち、前記主センサに到達しない光束の光路に配置されて該光束を受光する1個又は複数個の補助センサと、
前記補助センサの出力値に基づいて前記主センサの出力値を補正する補正手段と、
を備えた分光測定器。 - 前記補正手段は、前記主センサの出力値から演算した受光強度値が、前記補助センサの出力値から演算した受光強度値と同じになるように、前記主センサの出力値を補正する請求項1に記載の分光測定器。
- 前記主センサの受光光量を調整するための受光光量調整部材を備えている請求項1又は2に記載の分光測定器。
- 前記受光光量調整部材は、前記被測定光の光路に対して挿入退避可能に配置される減光部材である請求項3に記載の分光測定器。
- 前記受光光量調整部材の前方に前記補助センサが配置され、前記補正手段は、前記主センサと前記補助センサの出力値を同時に取得して、前記主センサの出力値を補正する請求項3又は4に記載の分光測定器。
- 前記減光部材の後方に第1の補助センサが配置され、
前記補正手段は、前記減光部材の光路への挿入状態で前記主センサの出力値を取得し、光路からの退避状態で前記第1の補助センサの出力値を取得して、前記主センサの出力値を補正する請求項4に記載の分光測定器。 - 前記減光部材の前方に第2の補助センサが配置され、
前記補正手段は、前記主センサの出力値の取得時と前記第1の補助センサの出力値の取得時のそれぞれのタイミングで前記第2の補助センサの出力値を取得し、取得した前記第2の補助センサの出力値の比から時間的な光量変化率を算出し、算出された前記光量変化率に基づいて時間的な光量変化を補正する請求項6に記載の分光測定器。 - 前記受光光量調整部材の前方に第1の補助センサが、後方に第2の補助センサがそれぞれ配置され、
前記補正手段は、前記主センサ、第1の補助センサ及び第2の補助センサの出力値を同時に取得し、取得された前記第1の補助センサ及び第2の補助センサの出力値比の基準値からの変化率に基づいて、前記主センサの出力値を補正する請求項3または4に記載の分光測定器。 - 前記減光部材の後方に第1の補助センサが配置され、
前記補正手段は、前記減光部材の光路への挿入状態で前記主センサの出力値と前記第1の補助センサの出力値を同時に取得し、前記減光部材の光路からの退避状態で前記第1の補助センサの出力値を取得し、取得された前記第1の補助センサのそれぞれの出力値の比に基づいて、前記主センサの出力値を補正する請求項4に記載の分光測定器。 - 前記減光部材の前方に第2の補助センサが配置され、
前記補正手段は、前記第1の補助センサの出力値の取得タイミングと同じタイミングで前記第2の補助センサの出力値を2回取得し、取得された前記第2の補助センサの2回の出力値の比から時間的な光量変化率を算出し、算出された前記光量変化率に基づいて時間的な光量変化を補正する請求項9に記載の分光測定器。 - 前記補助センサは、前記入射部から入射した光束のうち、前記回折格子へ照射されない光束を受光する請求項1~10のいずれかに記載の分光測定器。
- 前記補助センサは回折0次光を受光する請求項1~10のいずれかに記載の分光測定器。
- 前記補助センサは、それぞれ受光可能な光量範囲が異なっている複数個の補助センサである請求項1~12のいずれかに記載の分光測定器。
- 前記補助センサの受光光量を制御する開口絞りを備えている請求項1~13のいずれかに記載の分光測定器。
- 前記補助センサの受光光量を制御する光学フィルターを備えている請求項1~13のいずれかに記載の分光測定器。
- 前記補助センサは、受光感度が標準視感度となる光学フィルターを備えている請求項1~15のいずれかに記載の分光測定器。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202080046919.8A CN114026407A (zh) | 2019-07-04 | 2020-06-26 | 分光测定器 |
| US17/620,978 US12104953B2 (en) | 2019-07-04 | 2020-06-26 | Spectrometer |
| JP2021529994A JP7494851B2 (ja) | 2019-07-04 | 2020-06-26 | 分光測定器 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019125273 | 2019-07-04 | ||
| JP2019-125273 | 2019-07-04 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021002286A1 true WO2021002286A1 (ja) | 2021-01-07 |
Family
ID=74100276
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/025177 WO2021002286A1 (ja) | 2019-07-04 | 2020-06-26 | 分光測定器 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12104953B2 (ja) |
| JP (1) | JP7494851B2 (ja) |
| CN (1) | CN114026407A (ja) |
| WO (1) | WO2021002286A1 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6250641A (ja) * | 1985-08-30 | 1987-03-05 | Hitachi Ltd | 吸光光度計を備えた分析装置 |
| JPS63117234A (ja) * | 1986-11-04 | 1988-05-21 | Canon Inc | 光学測定装置 |
| JP2002206967A (ja) * | 2001-01-11 | 2002-07-26 | Minolta Co Ltd | 測光装置および測色装置 |
| JP2013168512A (ja) * | 2012-02-15 | 2013-08-29 | Seiko Instruments Inc | 光検出デバイス及び光検出デバイスの製造方法 |
| JP2016114544A (ja) * | 2014-12-17 | 2016-06-23 | 三井金属計測機工株式会社 | 青果物非破壊糖酸度計及びその使用方法 |
| CN109187369A (zh) * | 2018-08-02 | 2019-01-11 | 佛山市方垣机仪设备有限公司 | 一种应用了联合检测技术的油料检测装置及检测方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4454098B2 (ja) | 2000-03-21 | 2010-04-21 | 株式会社トプコン | 測光装置 |
| JP4089314B2 (ja) | 2002-07-04 | 2008-05-28 | コニカミノルタセンシング株式会社 | 回折手段の0次回折光を利用した分光測定器 |
| JP4642627B2 (ja) | 2005-10-12 | 2011-03-02 | キヤノン株式会社 | 走査光学装置及びそれを用いた画像形成装置 |
| US8735803B2 (en) * | 2009-11-06 | 2014-05-27 | Precision Energy Services, Inc | Multi-channel detector assembly for downhole spectroscopy |
| US8901513B2 (en) * | 2011-03-08 | 2014-12-02 | Horiba Instruments, Incorporated | System and method for fluorescence and absorbance analysis |
| EP3032277B1 (de) * | 2014-12-12 | 2021-04-07 | Leica Geosystems AG | Lasertracker |
| EP3470924A1 (en) * | 2017-10-11 | 2019-04-17 | ASML Netherlands B.V. | Method of optimizing the position and/or size of a measurement illumination spot relative to a target on a substrate, and associated apparatus |
-
2020
- 2020-06-26 JP JP2021529994A patent/JP7494851B2/ja active Active
- 2020-06-26 WO PCT/JP2020/025177 patent/WO2021002286A1/ja active Application Filing
- 2020-06-26 US US17/620,978 patent/US12104953B2/en active Active
- 2020-06-26 CN CN202080046919.8A patent/CN114026407A/zh active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6250641A (ja) * | 1985-08-30 | 1987-03-05 | Hitachi Ltd | 吸光光度計を備えた分析装置 |
| JPS63117234A (ja) * | 1986-11-04 | 1988-05-21 | Canon Inc | 光学測定装置 |
| JP2002206967A (ja) * | 2001-01-11 | 2002-07-26 | Minolta Co Ltd | 測光装置および測色装置 |
| JP2013168512A (ja) * | 2012-02-15 | 2013-08-29 | Seiko Instruments Inc | 光検出デバイス及び光検出デバイスの製造方法 |
| JP2016114544A (ja) * | 2014-12-17 | 2016-06-23 | 三井金属計測機工株式会社 | 青果物非破壊糖酸度計及びその使用方法 |
| CN109187369A (zh) * | 2018-08-02 | 2019-01-11 | 佛山市方垣机仪设备有限公司 | 一种应用了联合检测技术的油料检测装置及检测方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2021002286A1 (ja) | 2021-01-07 |
| JP7494851B2 (ja) | 2024-06-04 |
| CN114026407A (zh) | 2022-02-08 |
| US12104953B2 (en) | 2024-10-01 |
| US20220357199A1 (en) | 2022-11-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7315371B2 (en) | Multi-channel spectrum analyzer | |
| JP2011089961A (ja) | 分光器およびそれを備えた測光装置 | |
| US6459485B1 (en) | Optical system | |
| US7911607B2 (en) | Light measuring device and scanning optical system | |
| CN101922968B (zh) | 一种距离误差自动校正亮度计 | |
| US20120105847A1 (en) | Spectrometric measurement system and method for compensating for veiling glare | |
| WO2021002286A1 (ja) | 分光測定器 | |
| US20150247798A1 (en) | Optical system and optical quality measuring apparatus | |
| KR101239573B1 (ko) | 측광 장치 | |
| US20240264454A1 (en) | Imager and spot sampler with translatable stage | |
| US20240393178A1 (en) | Method for calibrating a spectrometer device | |
| KR20100031933A (ko) | 단순 구조의 분광기 및 그 보정방법 | |
| Breare et al. | The faint object spectrograph for the 2.5-m Isaac Newton Telescope | |
| US8416404B2 (en) | Method and system for measurement and correction of thermally induced changes of boresight, effective focal length, and focus | |
| JP7616218B2 (ja) | 変倍対物レンズおよびそれを備える測光測色計 | |
| Plaipichit et al. | Spectroscopy system using digital camera as two dimensional detectors for undergraduate student laboratory | |
| CN201748974U (zh) | 一种距离误差自动校正亮度计 | |
| CN212459386U (zh) | 一种光学测量仪器 | |
| RU2025657C1 (ru) | Устройство для контроля толщины пленок многослойного оптического покрытия в процессе его нанесения осаждением в вакуумной камере | |
| KR20240011694A (ko) | 막 두께 측정 장치 및 막 두께 측정 방법 | |
| JP6331986B2 (ja) | 光学特性測定装置 | |
| JPS5839915A (ja) | 光センサ分光感度測定装置 | |
| CN108291839B (zh) | 测定用光学装置 | |
| US20200018649A1 (en) | Imaging Spectrograph Utilizing the Zero Order of the Diffraction Grating | |
| Zhang et al. | Miniature spectrometer based on linear variable interference filters |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20834951 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021529994 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20834951 Country of ref document: EP Kind code of ref document: A1 |