WO2020230308A1 - 運転支援方法及び運転支援装置 - Google Patents
運転支援方法及び運転支援装置 Download PDFInfo
- Publication number
- WO2020230308A1 WO2020230308A1 PCT/JP2019/019398 JP2019019398W WO2020230308A1 WO 2020230308 A1 WO2020230308 A1 WO 2020230308A1 JP 2019019398 W JP2019019398 W JP 2019019398W WO 2020230308 A1 WO2020230308 A1 WO 2020230308A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- mode
- lane
- steering wheel
- vehicle
- hands
- Prior art date
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0053—Handover processes from vehicle to occupant
- B60W60/0055—Handover processes from vehicle to occupant only part of driving tasks shifted to occupants
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/161—Decentralised systems, e.g. inter-vehicle communication
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0053—Handover processes from vehicle to occupant
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0057—Estimation of the time available or required for the handover
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/05—Type of road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/30—Road curve radius
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/40—High definition maps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/12—Lateral speed
- B60W2720/125—Lateral acceleration
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
Abstract
運転支援レベルを上げたモードでの走行シーンにおいて、ハンドル支援解除が事前に把握されると運転支援レベルを段階的に下げることで、システムからドライバーへの委譲をより確実に行うこと。 ドライバーの運転操作を支援する運転支援機能として車速・車間制御機能とレーンキープ機能を有し、モード遷移コントローラ(47)を備える。「ハンズオフモードM1」が選択されているレーンキープ走行中、自車の走行ルートの延長上に自車線から連続する車線を認識できない車線消滅領域(S)を検出する。車線消滅領域(S)が検出されると車線消滅開始点(Ps1)の情報を取得し、自車位置と車線消滅開始点(Ps1)との間に第1位置(P1)と第2位置(P2)を設定する。そして、第1位置(P1)と第2位置(P2)と車線消滅開始点(Ps1)をモード遷移位置とし、「ハンズオフモードM1」→「ハンズオンモードM2」→「ハンドル操作モードM3」→「ハンドル支援解除モードM4」へと遷移する。
Description
本開示は、運転支援方法及び運転支援装置に関する。
従来、自動運転からドライバー運転への切換えに際し、スピーカから「自動操舵を解除します、準備して下さい」との音声情報を発し、自動操舵を解除してステアリングをドライバーに委ねる。自動操舵の解除を行うと、次に走行偏差が所定の許容範囲以下であるか否かを判定する。そして、この判定がYesであった場合にのみ、「自動アクセルと自動ブレーキを解除します、準備して下さい」との音声情報を発し、自動アクセルと自動ブレーキとを解除してアクセルとブレーキとをドライバーに委ねる。しかる後、表示装置の画面上での「自動運転中」の表示を中止する、自動運転装置が知られている(例えば、特許文献1参照)。
従来装置は、自動運転からドライバー運転への切換えの際、まず、自動操舵を解除し、対象区間通過後に自動アクセルと自動ブレーキを解除している。しかし、ドライバーの運転操作を支援する運転支援制御において、ドライバーによる運転操作の支援レベルを上げる運転支援高度化に伴い、システムからドライバーへの委譲をより確実に行うことが求められる、という課題があった。
本開示は、上記課題に着目してなされたもので、運転支援レベルを上げたモードでの走行シーンにおいて、ハンドル支援解除が事前に把握されると運転支援レベルを段階的に下げることで、システムからドライバーへの委譲をより確実に行うことを目的とする。
上記目的を達成するため、本開示は、ドライバーの運転操作を支援する運転支援機能として車速・車間制御機能とレーンキープ機能を有し、運転支援モードを遷移するモード遷移コントローラによる運転支援方法である。運転支援モードとして、ドライバーがハンドルから手を離すことを許可するハンズオフモードと、ドライバーがハンドルを手で握ることを条件とするハンドル把持モードと、レーンキープ機能を解除するハンドル支援解除モードと、を有する。ハンズオフモードが選択されているレーンキープ走行中、自車の走行ルートの延長上に自車線から連続する車線を認識できない車線消滅領域を検出する。車線消滅領域が検出されると車線消滅開始点の情報を取得し、自車位置と車線消滅開始点との間にモード遷移位置を設定する。自車がモード遷移位置に到達すると、ハンズオフモードからハンドル把持モードへのモード遷移を要求する。ドライバーによるハンドルの把持が確認された場合、自車が車線消滅開始点に到達するまでに、ハンドル把持モードからハンドル支援解除モードへモード遷移する。
上記課題解決手段を採用したため、運転支援レベルを上げたモードでの走行シーンにおいて、ハンドル支援解除が事前に把握されると運転支援レベルを段階的に下げることで、システムからドライバーへの委譲をより確実に行うことができる。
以下、本開示による運転支援方法及び運転支援装置を実施するための形態を、図面に示す実施例1に基づいて説明する。
実施例1における運転支援方法及び運転支援装置は、ドライバーの運転操作を支援する先進運転支援システムADAS(「Advanced Driver Assistance Systems」の略称)を搭載した運転支援車両に適用したものである。以下、実施例1の構成を、「全体システム構成」、「モード遷移コントローラの制御ブロック構成」、「運転支援モード切り替え制御処理構成」に分けて説明する。
[全体システム構成]
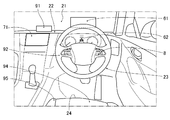
図1は、実施例1の運転支援方法及び運転支援装置が適用された先進運転支援システムを示す。図2は、運転支援車両のドライバーシート位置からフロントウィンドウを視たときの車室内構成を示す。図3は、運転支援車両のハンドルに設けられたドライバーによる操作スイッチを示す。以下、図1~図3に基づいて全体システム構成を説明する。
図1は、実施例1の運転支援方法及び運転支援装置が適用された先進運転支援システムを示す。図2は、運転支援車両のドライバーシート位置からフロントウィンドウを視たときの車室内構成を示す。図3は、運転支援車両のハンドルに設けられたドライバーによる操作スイッチを示す。以下、図1~図3に基づいて全体システム構成を説明する。
先進運転支援システムADASは、車速・車間制御機能、レーンキープ機能、ルート走行支援機能を持つシステムである。そして、図1に示すように、車載センサ1と、地図データ記憶部2と、外部データ通信器3と、ADAS制御ユニット4と、アクチュエータ5と、HMIデバイス6と、ナビゲーションシステム7と、操作スイッチ8と、制御情報センサ類9と、を備えている。なお、「HMI」は「Human Machine Interface」の略称である。
車載センサ1は、カメラ11と、レーダー12と、GPS13と、車載データ通信器14と、を有する。車載センサ1により取得したセンサ情報は、ADAS制御ユニット4へ出力される。
カメラ11は、自車線や隣接車線や自車周囲車両や自車周囲歩行者等の自車の周囲情報を画像データにより取得する機能を実現する自車周囲認識センサである。カメラ11としては、前方認識カメラ、後方認識カメラ、右方認識カメラ、左方認識カメラ等を組み合わせ、アラウンドビューモニタ機能を持たせた構成としている。このカメラ11では、自車走行路上物体・車線・自車走行路外物体(道路構造物、先行車、後続車、対向車、周囲車両、歩行者、自転車、二輪車)・自車走行路(道路白線、道路境界、停止線、横断歩道)・道路標識(制限速度)等が検知される。
レーダー12は、自車周囲の物体の存在を検知する機能と共に、自車周囲の物体までの距離を検知する機能を実現する測距センサである。ここで、「レーダー12」とは、電波を用いたレーダーと、光を用いたライダーと、超音波を用いたソナーと、を含む総称をいう。このレーダー12では、自車走行路上物体・自車走行路外物体(道路構造物、先行車、後続車、対向車、周囲車両、歩行者、自転車、二輪車)等の位置が検知されると共に、各物体までの距離が検知される。
GPS13は、GNSSアンテナ13aを有し、衛星通信を利用することで停車中/走行中の自車位置(緯度・経度)を検知する自車位置センサである。なお、「GNSS」は「Global Navigation Satellite System:全地球航法衛星システム」の略称であり、「GPS」は「Global Positioning System:グローバル・ポジショニング・システム」の略称である。
車載データ通信器14は、外部データ通信器3との間で送受信アンテナ3a,14aを介して無線通信を行うことで、車載センサ1や地図データで取得することができない情報を外部から取得する外部データセンサである。ここで、「外部データ通信器3」が、例えば、自車の周辺を走行する他車に搭載されたデータ通信器の場合、自車と他車の間で車車間通信を行い、他車が保有する様々な情報のうち、自車で必要な情報をリクエストにより取得することができる。また、「外部データ通信器3」が、例えば、インフラ設備に設けられたデータ通信器の場合、自車とインフラ設備の間でインフラ通信を行い、自車で必要な情報をリクエストにより取得することができる。例えば、地図データ記憶部2に保存されている地図データでは不足する情報や地図データから変更された情報がある場合、不足/変更情報を補うことができる。また、自車の走行経路上での渋滞情報や走行規制情報等の交通情報も取得できる。
地図データ記憶部2は、緯度経度と地図情報が対応づけられた、いわゆる電子地図データが格納された車載メモリにより構成される。地図データ記憶部2に格納される地図データは、高精度地図データを有さない地域を除いて、基本的に車線を認識することができるレベルの精度を持つ高精度地図データとする。そして、GPS13にて検知される自車位置がADAS制御ユニット4にて認識されると、自車位置を中心とする所定範囲の高精度地図データがADAS制御ユニット4やナビゲーションシステム7へと送られる。
ここで、「高精度地図データ」には、各地点に対応づけられた道路情報を有し、道路情報は、ノードと、ノード間を接続するリンクにより定義される。道路情報は、道路の位置/領域により道路を特定する情報と、道路ごとの道路種別、道路毎の車線幅、道路の形状情報とを含む。道路情報は、各道路リンクの識別情報毎に、交差点の位置、交差点の進入方向、交差点の種別その他の交差点に関する情報を対応づけて記憶されている。また、道路情報は、各道路リンクの識別情報ごとに、道路種別、車線幅、道路形状、直進の可否、進行の優先関係、追い越しの可否(隣接レーンへの進入の可否)、制限速度、標識、その他の道路に関する情報を対応づけて記憶されている。
ADAS制御ユニット4は、運転支援制御を統合するユニットであり、車速・車間制御機能を分担するコントローラとして、アクセル/ブレーキ支援コントローラ41と、走行駆動源コントローラ42と、ブレーキコントローラ43と、を有する。そして、レーンキープ機能を分担するコントローラとして、ハンドル支援コントローラ44と、ステアリングコントローラ45と、を有する。さらに、先進運転支援システムADASの場合、ドライバーとシステムとのコミュニケーションをとる機能を分担するコントローラとして、HMIコントローラ46を有する。加えて、先進運転支援システムADASの場合、ドライバーのハンドル手離しによる運転支援モードまで運転支援レベルを上げたことに伴い、運転支援モードの切り替え制御を行うモード遷移コントローラ47を有する。
アクセル/ブレーキ支援コントローラ41は、ドライバーによるアクセル操作とブレーキ操作を支援する下記の制御を行う。
(a) 先行車を検出しているときは、ドライバーがセットした車速を上限とし、車速に応じた車間距離を保つように車間制御を行う。
(b) 先行車を検出していない場合は、設定車速で定速走行する。
(c) 先行車が停止したとき、先行車に続いて自車も停止する。
(d) 先行車が発進したとき、リジューム・アクセラレートスイッチ82(図3参照)を押すか、アクセルペダルを踏むと停止状態を解除し、再び追従走行を開始する。
(e) 車速・車間制御機能により自車が停止しているとき、システム解除操作を行うと、電動パーキングブレーキアクチュエータ53への指令により電動パーキングブレーキを作動させる。
(a) 先行車を検出しているときは、ドライバーがセットした車速を上限とし、車速に応じた車間距離を保つように車間制御を行う。
(b) 先行車を検出していない場合は、設定車速で定速走行する。
(c) 先行車が停止したとき、先行車に続いて自車も停止する。
(d) 先行車が発進したとき、リジューム・アクセラレートスイッチ82(図3参照)を押すか、アクセルペダルを踏むと停止状態を解除し、再び追従走行を開始する。
(e) 車速・車間制御機能により自車が停止しているとき、システム解除操作を行うと、電動パーキングブレーキアクチュエータ53への指令により電動パーキングブレーキを作動させる。
一般に“クルーズコントロール”と呼ばれる上記(a)~(e)による車速・車間制御以外にアクセル/ブレーキ支援コントローラ41は下記の制御を行う。
(f) 車速・車間制御機能により自車が走行しているとき、ドライバーのスイッチ操作による設定車速の変更(上下)を許容する。
(g) 制限速度標識検知機能により、新しい制限速度を検出した場合、制限速度アシスト表示が点灯するとともに、ディスプレイ上に“設定車速が変更されました”が表示され、検出した制限速度を反映して設定車速にする。但し、ドライバーのスイッチ操作により、設定車速を制限速度よりも高い速度に設定した後、制限速度が上がっても設定車速を超えない場合は制限速度を設定車速に反映しない(制限速度アシスト)。
(h) 車速・車間制御機能により自車が走行しているとき、一時的に加速したいときはアクセルペダルを踏むと加速を許容する。アクセルペダルを操作して加速しているときは、ブレーキ制御、接近警報、カーブ警報を行わない。アクセルペダルを離すと、それまでの車速・車間制御に復帰する。
(i) 車速・車間制御機能により自車が走行しているとき、一時的に減速したいときはブレーキペダルを踏むと減速を許容する。なお、減速前の設定車速で再びセットしたいときは、リジューム・アクセラレートスイッチ82(図3参照)を押す。
(j) カーブ路を走行するときは、地図情報に基づいて前方のカーブの大きさに応じた車速で走行できるように車速制御を行う(カーブ連動減速)。このカーブ連動減速機能は、高精度地図データ又はナビゲーションシステムから取得した曲率情報を用い、横加速度が所定の値以下になるように目標速度の上限を定める機能である。つまり、カーブ連動減速機能は、横加速度が所定の値以下になるようにカーブ路の曲率と位置から逆算してカーブ路より手前から減速を開始し、各道路における減速を完了した状態で走行する。このとき、「ハンドル操作モード」でのカーブ連動減速の目標加速度を、「ハンズオンモード」、「ハンズオフモード」、「ハンドル線解除モード」でのカーブ連動減速の目標加速度の値よりも低くしている。
(f) 車速・車間制御機能により自車が走行しているとき、ドライバーのスイッチ操作による設定車速の変更(上下)を許容する。
(g) 制限速度標識検知機能により、新しい制限速度を検出した場合、制限速度アシスト表示が点灯するとともに、ディスプレイ上に“設定車速が変更されました”が表示され、検出した制限速度を反映して設定車速にする。但し、ドライバーのスイッチ操作により、設定車速を制限速度よりも高い速度に設定した後、制限速度が上がっても設定車速を超えない場合は制限速度を設定車速に反映しない(制限速度アシスト)。
(h) 車速・車間制御機能により自車が走行しているとき、一時的に加速したいときはアクセルペダルを踏むと加速を許容する。アクセルペダルを操作して加速しているときは、ブレーキ制御、接近警報、カーブ警報を行わない。アクセルペダルを離すと、それまでの車速・車間制御に復帰する。
(i) 車速・車間制御機能により自車が走行しているとき、一時的に減速したいときはブレーキペダルを踏むと減速を許容する。なお、減速前の設定車速で再びセットしたいときは、リジューム・アクセラレートスイッチ82(図3参照)を押す。
(j) カーブ路を走行するときは、地図情報に基づいて前方のカーブの大きさに応じた車速で走行できるように車速制御を行う(カーブ連動減速)。このカーブ連動減速機能は、高精度地図データ又はナビゲーションシステムから取得した曲率情報を用い、横加速度が所定の値以下になるように目標速度の上限を定める機能である。つまり、カーブ連動減速機能は、横加速度が所定の値以下になるようにカーブ路の曲率と位置から逆算してカーブ路より手前から減速を開始し、各道路における減速を完了した状態で走行する。このとき、「ハンドル操作モード」でのカーブ連動減速の目標加速度を、「ハンズオンモード」、「ハンズオフモード」、「ハンドル線解除モード」でのカーブ連動減速の目標加速度の値よりも低くしている。
走行駆動源コントローラ42は、アクセル/ブレーキ支援コントローラ41によって目標車速が生成されると、自車の実車速が目標車速になるように駆動指令値を演算し、駆動アクチュエータ51へ出力する縦制御を行う。
ブレーキコントローラ43は、アクセル/ブレーキ支援コントローラ41によって目標制動減速度が生成されると、自車の実制動減速度が目標制動減速度になるように制動指令値を演算し、制動アクチュエータ52へ出力する縦制御を行う。
ハンドル支援コントローラ44は、前方認識カメラによる車線両側のレーンマーカーの検出に基づいて、車線の中央部を自車が走行するようにステアリング制御(横制御)し、ドライバーのステアリング操作を支援するレーンキープ機能を発揮する。このハンドル支援コントローラ44には、レーンキープ機能以外に、ナビゲーションシステム7との連動により、ドライバーが目的地を設定している場合、予め生成された走行ルートに沿ってレーンキープ走行していることを条件とするルート走行支援機能を有する。ルート走行支援機能は、走行ルートに沿って走行するために必要な車線変更開始点に到達すると、表示によりドライバーに車線変更を行うか否かを確認し、ドライバーがスイッチ操作した場合、ステアリング制御により車線変更を支援する。
ステアリングコントローラ45は、ハンドル支援コントローラ44によって車線の中央部を自車が走行する目標舵角が生成されると、自車の実舵角が目標舵角になるように舵角指令値を演算し、舵角アクチュエータ54へ出力する横制御を行う。
HMIコントローラ46は、車速・車間制御機能とレーンキープ機能の作動状態や作動状態変化を視覚により認識できるように、ヘッドアップディスプレイ61とメータディスプレイ62への表示指令を生成する。例えば、「ハンズオフモード」、「ハンズオンモード」、「ハンドル操作モード」、「ハンドル支援解除モード」を表示するとき、モード別色分け表示やアイコン表示やメッセージ表示を活用し、ドライバーが一見するだけで作動状態を理解できるように表示する。また、ドライバーに対して聴覚に訴えるアナウンスを必要とするとき、スピーカ63への音声信号を生成し、ドライバーに対して聴覚に訴える警報を必要とするとき、警報器64の作動/停止指令を生成する。
ここで、HMIデバイス6に有するヘッドアップディスプレイ61は、図2に示すように、フロントウィンドウ21の下部位置に設定され、灯光器でウィンドシールドにシステム状態等を表示する。メータディスプレイ62は、インストルメントパネル22の計器表示部に設定され、システム作動状態や周辺車両の状態等を表示する。スピーカ63及び警報器64は、インストルメントパネル22のパネル内側の所定位置に設定される。
モード遷移コントローラ47は、ハンズオフモードが選択されているレーンキープ走行中、自車の走行ルートの延長上に自車線から連続する車線を認識できない車線消滅領域を検出する。車線消滅領域が検出されると車線消滅開始点の情報を取得し、自車位置と車線消滅開始点との間に第1位置と第2位置を設定する。自車が第1位置に到達すると、ハンズオフモードからハンズオンモードへのモード遷移を要求する。自車が第2位置に到達すると、ハンズオンモードからハンドル操作モードへのモード遷移を要求する。ドライバーによるハンドルの把持が確認された場合、自車が車線消滅開始点に到達するまでに、ハンドル操作モードからハンドル支援解除モードへモード遷移する。
ここで、「ハンズオフモード」とは、ドライバーがハンドル23から手を離すことを許可する運転支援モードをいう。「ハンズオンモード」とは、ドライバーがハンドル23に手を添えることを条件とする運転支援モードをいう。「ハンドル操作モード」とは、ハンドル操作をドライバーに促す運転支援モードをいう。「ハンドル支援解除モード」とは、レーンキープ機能を解除する運転支援モードをいう。即ち、「ハンズオフモード」と「ハンズオンモード」と「ハンドル操作モード」は、ドライバーがハンドル23から手を離すことを許可するモードか、手を添えることを要求するモードか、手で操作することを要求するモードかという点でのみ相違するモードであり、運転支援制御を変えるモードではない。一方、「ハンドル支援解除モード」は、ハンドル支援コントローラ44によるレーンキープ機能を解除し、アクセル/ブレーキ支援コントローラ41による車速・車間制御機能は残すモードである。つまり、「ハンドル支援解除モード」は、ハンドル操作をシステムからドライバーへ委譲するモードである。
ナビゲーションシステム7は、地図データ記憶部2に格納している地図データと衛星通信を利用したGPS13を組み合わせ、目的地を設定すると、現在の自車位置から目的地までの走行ルートを生成し、目的地まで自車を道案内するシステムである。そして、走行ルートが生成されると、走行ルートと自車アイコンとともに道路地図画面をナビディスプレイ71に表示する。ナビディスプレイ71は、図2に示すように、インストルメントパネル22の中央上部位置に配置され、ドライバーによるタッチ操作等により目的地を設定する機能を有する。
操作スイッチ8は、図2に示すように、ハンドル23のうち、ステアリングホイールとステアリングシャフトを繋ぐステアリングハブであって、ドライバーがステアリングホイールを持ったままで指により操作可能な位置に設定される。操作スイッチ8としては、メインスイッチ81とリジューム・アクセラレートスイッチ82とセット・コーストスイッチ83とキャンセルスイッチ84と車間調整スイッチ85と車線変更支援スイッチ86とを有する。メインスイッチ81は、システムの電源オン・オフスイッチである。リジューム・アクセラレートスイッチ82は、作動解除後に解除前の設定車速で作動を再開する機能、設定車速を上げる機能、先行車に追従して停止した後に再発進する機能を有する。セット・コーストスイッチ83は、走行時の車速で作動を開始する機能、設定車速を下げる機能を有する。キャンセルスイッチ84は、作動を解除するスイッチである。車間調整スイッチ85は、設定車間を切り替えるスイッチである。車線変更支援スイッチ86は、システムが車線変更の開始をドライバーに確認したとき、車線変更の開始を指示するスイッチである。
ここで、メインスイッチ81を押した後、設定したい車速まで加速又は減速し、セット・コーストスイッチ83を押すと、走行している道路の制限速度が設定車速になり、ADAS制御ユニット4による運転支援制御の作動を開始する。なお、走行している道路の制限速度を検出していない場合、又は、制限速度アシストをオフにしている場合は、セット・コーストスイッチ83を押したときの速度が設定車速になり、ADAS制御ユニット4による運転支援制御の作動を開始する。
ADAS制御ユニット4による運転支援制御の作動を解除するときは、キャンセルスイッチ84を押す、又は、メインスイッチ81を押す、又は、ブレーキペダルを踏む(但し、車速・車間制御機能により、自車が停止しているときを除く。)の何れかの操作を行う。
制御情報センサ類9は、ADAS制御ユニット4による運転支援制御を実行する際に必要な情報を取得する。制御情報センサ類9としては、図2に示すように、ドライバーモニタカメラ91、タッチセンサ92、着座センサ94、シートベルトバックルスイッチ95を有する。その他、図1に示すように、トルクセンサ93、車速センサ96、アクセル開度センサ97を有する。
ドライバーモニタカメラ91は、カメラレンズをドライバーに向けて設定され、ドライバーの前方注視(顔の向き、開眼/閉眼)を監視する。タッチセンサ92(静電容量センサ)は、ハンドル23のうちドライバーが手を添えるステアリングホイールに設定され、ドライバーがハンドル23に手を添えていることを検出する。トルクセンサ93は、ステアリング機構の操舵力伝達部に設置され、ドライバーが操舵トルクを加えてハンドル操作していることを検出する。着座センサ94(重量センサ)は、ドライバーシートのシートクッション24に設定され、ドライバーが着座していることを検出する。シートベルトバックルスイッチ95は、シートベルトがロックされていることを検出する。車速センサ96は、自車の実車速を検出する。アクセル開度センサ97は、ドライバーによりアクセル操作が行われたときにアクセル操作量を検出する。
[モード遷移コントローラの制御ブロック構成]
以下、ADAS制御ユニット4に有するモード遷移コントローラ47を示す図4に基づいて、モード遷移コントローラ47の制御ブロック構成を説明する。
以下、ADAS制御ユニット4に有するモード遷移コントローラ47を示す図4に基づいて、モード遷移コントローラ47の制御ブロック構成を説明する。
モード遷移コントローラ47は、図4に示すように、車線消滅領域検出部471と、位置設定部472と、ハンズオンモード遷移要求部473と、ハンドル操作モード遷移要求部474と、ハンドル支援解除モード遷移部475と、を有する。さらに、ハンズオンモード遷移要求部476と、ハンズオフモード遷移部477と、を有する。
車線消滅領域検出部471は、「ハンズオフモードM1」が選択されているレーンキープ走行中、自車の走行ルートの延長上に自車線から連続する車線を認識できない車線消滅領域を検出する。ここで、「車線消滅領域」とは、下記の箇所等をいう。
(a) 出口:車線の属性や中心線等の情報による地図データがない箇所。具体的には、高速道路の出口やサービスエリアやパーキングエリア等をいう。
(b) 料金所:地図データはあり、車線がないという情報がある箇所。
(c) 無車線区間(無車線増加、無車線減少):地図データはあり、車線がないという情報がある箇所。
(d) 合流:地図データあり、合流により自車線が消滅するという情報がある箇所。
(e) 車線減少:地図データあり、車線減少により自車線が消滅するという情報がある箇所。
(a) 出口:車線の属性や中心線等の情報による地図データがない箇所。具体的には、高速道路の出口やサービスエリアやパーキングエリア等をいう。
(b) 料金所:地図データはあり、車線がないという情報がある箇所。
(c) 無車線区間(無車線増加、無車線減少):地図データはあり、車線がないという情報がある箇所。
(d) 合流:地図データあり、合流により自車線が消滅するという情報がある箇所。
(e) 車線減少:地図データあり、車線減少により自車線が消滅するという情報がある箇所。
位置設定部472は、車線消滅領域が検出されると車線消滅開始点の情報を取得し、自車位置と車線消滅開始点との間に第1位置(自車に近い位置)と第2位置(自車から遠い位置)を設定する。
ハンズオンモード遷移要求部473は、自車が第1位置に到達すると、「ハンズオフモードM1」から「ハンズオンモードM2」へのモード遷移を要求する。ここで、第1位置の設定は、自車の車線変更を要しない道路であるのか、車線変更を要する道路であるのかにより異ならせている。
なお、「ハンズオンモードM2」へのモード遷移の要求は、ディスプレイ61,62への色分け・アイコン・メッセージの表示を変更すると共に“ハンドルを持って下さい。”とアナウンスすることで行う。そして、「ハンズオンモードM2」へのモード遷移の確認は、タッチセンサ92からのセンサ信号を監視することで行う。さらに、「ハンズオンモードM2」へのモード遷移要求にもかかわらず、所定時間以内にドライバーがハンドルを持ったことが検出できないと、自車を減速・停止させた後、運転支援制御の作動(縦制御+横制御)そのものを解除する。
ハンドル操作モード遷移要求部474は、自車が第2位置に到達すると、「ハンズオンモードM2」から「ハンドル操作モードM3」へのモード遷移を要求する。ここで、第2位置の設定は、車線消滅領域の手前に旋回半径が所定以下のカーブ路が存在しないのか存在するのかにより位置決め距離の起点を異ならせている。
なお、「ハンドル操作モードM3」へのモード遷移の要求は、ディスプレイ61,62への色分け・アイコン・メッセージの表示を変更すると共に“操作して下さい。”とアナウンスすることで行う。そして、「ハンドル操作モードM3」へのモード遷移の確認は、トルクセンサ93からのセンサ信号を監視することで行う。さらに、「ハンドル操作モードM3」へのモード遷移要求にもかかわらず、所定時間待ってもドライバーのハンドル操作が検出できないと、自車を減速・停止させた後、運転支援制御の作動(縦制御+横制御)そのものを解除する。
ハンドル支援解除モード遷移部475は、自車が車線消滅開始点に到達すると、「ハンドル操作モードM3」から「ハンドル支援解除モードM4」へモード遷移する。なお、「ハンドル支援解除モードM4」へモード遷移すると、ディスプレイ61,62への色分け・アイコン・メッセージの表示を変更する。「ハンドル支援解除モードM4」へのモード遷移条件は、第1位置や第2位置の設定にかかわらず、車線消滅開始点への到達という同じ条件で与えている。
ハンズオンモード遷移要求部476は、「ハンドル支援解除モードM4」が選択されている自車が車線消滅領域を通過して車線消滅終了点に到達し、かつ、車線の認識が再開される。車線の認識再開によりドライバーのハンドル操作を支援する横制御を開始することが可能になったことで、「ハンドル支援解除モードM4」から「ハンズオンモードM2」へモード遷移する。ここで、「ハンズオンモードM2」へのモード遷移は、横制御の開始とともに、ディスプレイ61,62への色分け・アイコン・メッセージの表示を変更することで行われる。なお、「ハンドル支援解除モードM4」が選択されているときは、ドライバーはハンドルを持ってステアリング操作を行っている。このため、「ハンドル支援解除モードM4」から「ハンドル操作モードM3」へのモード遷移は省略している。
ハンズオフモード遷移部477は、「ハンズオンモードM2」でのレーンキープ走行中、ハンズオフモード選択条件が成立すると、「ハンズオンモードM2」から「ハンズオフモードM1」へモード遷移する。ここで、手離し可能な「ハンズオフモードM1」へのモード遷移は、ディスプレイ61,62への色分け・アイコン・メッセージの表示を変更することで行われる。なお、「ハンズオフモードM1」を選択するハンズオフ条件は、例えば、“制限速度以下の車速で走行している”、“ドライバーがハンドル23を持っている”、“アクセルペダルが踏まれていない”、等の複数の条件で与えられる。
[運転支援モード切り替え制御処理構成]
以下、ADAS制御ユニット4に備えるモード遷移コントローラ47にて実行される運転支援モード切り替え制御処理の流れを示す図5に基づいて、各ステップによる運転支援モード切り替え制御構成を説明する。なお、この処理は、運転支援制御の作動開始によりスタートし、運転支援制御の作動を解除すると終了する。
以下、ADAS制御ユニット4に備えるモード遷移コントローラ47にて実行される運転支援モード切り替え制御処理の流れを示す図5に基づいて、各ステップによる運転支援モード切り替え制御構成を説明する。なお、この処理は、運転支援制御の作動開始によりスタートし、運転支援制御の作動を解除すると終了する。
ステップS1では、スタート、或いは、S6での運転支援制御の作動解除条件不成立との判断に続き、運転支援モードが「ハンドル支援解除モードM4」であるか否かを判断する。YES(「ハンドル支援解除モードM4」である)の場合はステップS32へ進み、NO(「ハンドル支援解除モードM4」以外である)の場合はステップS2へ進む。
ステップS2では、S1での「ハンドル支援解除モードM4」以外であるとの判断に続き、運転支援モードが「ハンズオフモードM1」であるか否かを判断する。YES(「ハンズオフモードM1」である)の場合はステップS7へ進み、NO(「ハンズオフモードM1」以外である)の場合はステップS3へ進む。
ステップS3では、S2での「ハンズオフモードM1」以外であるとの判断に続き、運転支援モードが「ハンズオンモードM2」であるか否かを判断する。YES(「ハンズオンモードM2」である)の場合はステップS4へ進み、NO(「ハンズオンモードM2」以外である)の場合はステップS6へ進む。
ステップS4では、S3での「ハンズオンモードM2」であるとの判断に続き、「ハンズオンモードM2」から「ハンズオフモードM1」へ切り替えるハンズオフ条件が成立しているか否かを判断する。YES(ハンズオフ条件成立)の場合はステップS5へ進み、NO(ハンズオフ条件不成立)の場合はステップS6へ進む。
ステップS5では、S4でのハンズオフ条件成立との判断に続き、「ハンズオンモードM2」から「ハンズオフモードM1」へモード遷移し、ステップS6へ進む。
ステップS6では、S5での「ハンズオフモードM1」へのモード遷移、或いは、S34での「ハンズオンモードM2」へのモード遷移、S21での「ハンドル支援解除モードM4」へのモード遷移、或いは、S3、S7、S32でのNOの判断に続き、運転支援制御の作動解除条件成立か否かを判断する。YES(解除条件成立)の場合はエンドへ進み、NO(解除条件不成立)の場合はステップS1へ戻る。
ステップS7では、S2での「ハンズオフモードM1」であるとの判断に続き、自車の走行ルートの延長上に自車線から連続する車線を認識できない車線消滅領域Sを検出したか否かを判断する。YES(車線消滅領域Sを検出した)の場合はステップS8へ進み、NO(車線消滅領域Sを検出しない)の場合はステップS6へ進む。
ステップS8では、S7での車線消滅領域Sを検出したとの判断に続き、自車が車線消滅領域Sに向かって走行ルートに沿って走行することを想定したとき、車線変更を要しないか否かを判断する。YES(車線変更を要しない)の場合はステップS9へ進み、NO(車線変更を要する)の場合はステップS10へ進む。
ステップS9では、S8での車線変更を要しないとの判断に続き、車線消滅開始点Ps1から第1距離X1の位置を第1位置P1に設定し、ステップS11へ進む。
ステップS10では、S8での車線変更を要するとの判断に続き、車線変更開始点Pe1を第1位置P1に設定し、ステップS11へ進む。つまり、車線変更を要するか否かにより第1位置P1の設定を異ならせている。
ステップS11では、S9又はS10での第1位置P1の設定に続き、車線消滅領域Sの手前に旋回半径が所定値以下のカーブ路Cが無いか否かを判断する。YES(カーブ路Cが無い)の場合はステップS12へ進み、NO(カーブ路Cが有る)の場合はステップS13へ進む。
ステップS12では、S11でのカーブ路Cが無いとの判断に続き、車線消滅開始点Ps1から第1距離X1より短い第2距離X2の位置を第2位置P2に設定し、ステップS14へ進む。
ステップS13では、S11でのカーブ路Cが有るとの判断に続き、カーブ路開始点Pc1から第1距離X1より短い第2距離X2の位置を第2位置P2に設定し、ステップS14へ進む。即ち、カーブ路Cの有無により、第2距離X2の設定を異ならせている。
ステップS14では、S12又はS13での第2位置P2の設定に続き、自車が第1位置P1に到達したか否かを判断する。YES(第1位置P1に到達した)の場合はステップS15へ進み、NO(第1位置P1に到達していない)の場合はステップS14の判断を繰り返す。
ステップS15では、S14での第1位置P1に到達したとの判断に続き、「ハンズオフモードM1」から「ハンズオンモードM2」へのモード遷移を要求し、ステップS16へ進む。
ステップS16では、S15での「ハンズオンモードM2」へのモード遷移に続き、「ハンズオンモードM2」へのモード遷移要求から所定時間以内にドライバーがハンドル23を握ったか否かを判断する。YES(所定時間以内にハンドルを握った)の場合はステップS17へ進み、NO(所定時間以内にハンドルを握っていない)の場合はステップS23へ進む。
ステップS17では、S16での所定時間以内にハンドルを握ったとの判断に続き、自車が第2位置P2に到達したか否かを判断する。YES(第2位置P2に到達した)の場合はステップS18へ進み、NO(第2位置P2に到達していない)の場合はステップS17の判断を繰り返す。
ステップS18では、S17での第2位置P2に到達したとの判断に続き、「ハンズオンモードM2」から「ハンドル操作モードM3」へのモード遷移を要求し、ステップS19へ進む。
ステップS19では、S18での「ハンドル操作モードM3」へのモード遷移、或いは、S22でのM3で所定時間経過していないとの判断に続き、自車が車線消滅開始点Ps1に到達したか否かを判断する。YES(車線消滅開始点Ps1に到達した)の場合はステップS21へ進み、NO(車線消滅開始点Ps1に到達していない)の場合はステップS20へ進む。
ステップS20では、S19での車線消滅開始点Ps1に到達していないとの判断に続き、ハンドル23を持ったドライバーがハンドル操作をしたか否かを判断する。YES(ハンドル操作をした)の場合はステップS21へ進み、NO(ハンドル操作をしていない)の場合はステップS22へ進む。
ステップS21では、S19での車線消滅開始点Ps1に到達したとの判断、或いは、S20でのハンドル操作をしたとの判断に続き、「ハンドル操作モードM3」から「ハンドル支援解除モードM4」へモード遷移を行い、ステップS6へ進む。
ステップS22では、S20でのハンドル操作をしていないとの判断に続き、「ハンドル操作モードM3」で所定時間が経過したか否かを判断する。YES(M3で所定時間が経過した)の場合はステップS23へ進み、NO(M3で所定時間が経過していない)の場合はステップS19へ戻る。
ステップS23では、S16での所定時間以内にハンドルを握っていないとの判断、或いは、S22でのM3で所定時間が経過したとの判断に続き、自車を減速・停止させ、ステップS24へ進む。なお、このときディスプレイ61,62上に“減速します”と表示し、自車を減速停止させる。
ステップS24では、S23での自車の減速・停止に続き、運転支援制御(縦制御+横制御)を解除し、エンドへ進む。
ステップS32では、S1での「ハンドル支援解除モードM4」であるとの判断に続き、自車が車線消滅領域Sを通過して車線消滅終了点Ps2に到達したか否かを判断する。YES(車線消滅終了点Ps2に到達した)の場合はステップS33へ進み、NO(車線消滅終了点Ps2に到達していない)の場合はステップS6へ進む。
ステップS33では、S32での車線消滅終了点Ps2に到達したとの判断に続き、前方認識カメラにより車線認識が再開されたか否かを判断する。YES(車線認識が再開された)の場合はステップS34へ進み、NO(車線認識が再開されていない)の場合はステップS6へ進む。
ステップS34では、S33での車線認識が再開されたとの判断に続き、「ハンドル支援解除モードM4」から「ハンズオンモードM2」へモード遷移し、ステップS6へ進む。
次に、「背景技術と課題解決対策」を説明する。そして、実施例1の作用を、「運転支援モード切り替え制御処理作用」、「運転支援モード切り替え制御作用」に分けて説明する。
[背景技術と課題解決対策]
ドライバーの運転操作を支援する運転支援機能として車速・車間制御機能とレーンキープ機能を有し、ドライバーがハンドルに手を添えることを条件とし、単一車線をレーンキープ走行する運転支援車両が知られている。
ドライバーの運転操作を支援する運転支援機能として車速・車間制御機能とレーンキープ機能を有し、ドライバーがハンドルに手を添えることを条件とし、単一車線をレーンキープ走行する運転支援車両が知られている。
この運転支援車両は、ドライバーがハンドルに手を添えることを条件とする以上、あくまで運転の主体をドライバーとするものである。そこで、運転支援レベルをさらに上げ、運転の主体をドライバーからシステムへ委譲し、ドライバーがハンドルから手を離す自動運転走行を可能にしたいという要求がある。
しかし、レーンキープ機能は、自車の車線を前方認識カメラにより認識していることを前提とし、自車を車線中央部に維持する機能である。このため、高速道路の料金所等のように、自車の走行ルートの延長上に自車線から連続する車線を認識できない車線消滅領域が存在すると、レーンキープ機能(=システムによるハンドル操作の支援機能)を解除せざるを得ない。
よって、ドライバーのハンドル手離し走行が可能なように運転支援レベルを高度化した場合、運転支援レベルを上げたモードからのハンドル支援解除モードへの移行しようとすると、運転支援レベルの落差が大きくなる。これに対し、特許文献1(特開平9-86223号公報)では、自動運転からドライバー運転への切換えに際し、スピーカから「自動操舵を解除します、準備して下さい」との音声情報を発し、自動操舵を解除してステアリングをドライバーに委ねるようにしている。
このため、ドライバーへ音声情報を発して報知するだけで、ドライバーがハンドルに手を添えていること、或いは、ハンドルを手で持って操作する態勢が整っていることを確認することができない。よって、例えば、ドライバーがハンドルから手離しの状態のままであるときに自動操舵が解除されてしまうおそれがある。即ち、自動運転からドライバー運転への切換えに際し、ハンドル操作の主体をシステムからドライバーへ委譲するとき、報知するだけで一気に委譲させるため、ドライバーへの委譲がうまくいかない、という課題があった。
本発明者等は、上記課題に対して、自車の走行ルートの延長上に自車線から連続する車線を認識できないことでハンドル支援が解除される領域が存在するとの情報は、地図データ等により取得可能である。そして、ハンドル支援が解除される領域を事前に把握することで、自車がハンドル支援解除地点まで到達するまでの余裕走行区間が生じ、この余裕走行区間でドライバーによるハンドル把持を確認することができる点に着目した。
上記着目点に基づいて本開示の運転支援方法は、「ハンズオフモードM1」が選択されているレーンキープ走行中、自車の走行ルートの延長上に自車線から連続する車線を認識できない車線消滅領域Sを検出する。車線消滅領域Sが検出されると車線消滅開始点Ps1の情報を取得し、自車位置と車線消滅開始点Ps1との間にモード遷移位置(第1位置P1、第2位置P2)を設定する。自車がモード遷移位置に到達すると、「ハンズオフモードM1」からハンドル把持モード(「ハンズオンモードM2」、「ハンドル操作モードM3」)へのモード遷移を要求する。ドライバーによるハンドル23の把持が確認された場合、自車が車線消滅開始点Ps1に到達するまでに、ハンドル把持モードから「ハンドル支援解除モードM4」へモード遷移する、という解決手段を採用した。
即ち、運転支援レベルを上げた「ハンズオフモードM1」でのレーンキープ走行シーンにおいて、システムによるハンドル支援が解除される車線消滅領域Sを事前に把握する。そして、車線消滅領域Sが事前に把握されると、モード遷移点を決め、「ハンズオフモードM1」→「ハンドル把持モードM2、M3」→「ハンドル支援解除モードM4」へと遷移するシーケンス制御を行う。つまり、運転支援レベルを段階的に下げてゆき、ドライバーによるハンドル23への把持を「ハンドル把持モードM2、M3」にて確認する。そして、最終的にハンドル操作をシステム(ハンドル支援制御)からドライバーによるマニュアル操作に委譲するものになる。
このため、運転支援レベルを上げた「ハンズオフモードM1」でのレーンキープ走行シーンにおいて、ハンドル支援解除が事前に把握されると運転支援レベルを段階的に下げることで、システムからドライバーへの委譲をより確実に行うことができる。
なお、モード遷移を行う場合、運転支援レベルを段階的に下げるだけでなく、同時にヘッドアップディスプレイ61及びメータディスプレイ62による表示を段階的に変更し、ドライバーの視覚やアナウンスによる聴覚に訴えて告知するようにしている。以下、図6に基づいて説明する。
まず、ヘッドアップディスプレイ61及びメータディスプレイ62は、ハンドルアイコン表示部、制限車速表示部、設定車速表示部、メッセージ表示部、車線/自車表示部、等を有する。そして、「ハンズオフモードM1」の選択中は、図6の表示D1に示すように、ハンドルアイコン表示部を例えば青色表示とし、ハンドルのみのアイコンを表示する。
次に、「ハンズオフモードM1」から「ハンズオンモードM2」へとモード遷移されると、図6の表示D2に示すように、ハンドルアイコン表示部を例えば緑色表示とし、ハンドルを手で持っているアイコンを表示する。そして、メッセージ表示部に“ハンドルを持って下さい。この先、料金所です。”と表示すると共にアナウンスする。
次に、「ハンズオンモードM2」から「ハンドル操作モードM3」へとモード遷移されると、図6の表示D3に示すように、ハンドルアイコン表示部を例えば赤色表示とし、ハンドルを手で持っているアイコンを表示する。そして、メッセージ表示部に“操作してください。この先、料金所です。”と表示すると共にアナウンスする。
最後に、「ハンドル操作モードM3」から「ハンドル支援解除モードM4」へとモード遷移されると、図6の表示D4に示すように、ハンドルアイコン表示部を例えば白色表示とし、ハンドルと手のアイコン表示を消す。
よって、「ハンズオフモードM1」から「ハンドル支援解除モードM4」へ段階的にモード遷移する場合、ヘッドアップディスプレイ61及びメータディスプレイ62の表示変更により、運転支援モードの遷移をドライバーに報知することができる。
[運転支援モード切り替え制御処理作用]
以下、モード遷移コントローラ47にて実行される運転支援モード切り替え制御処理作用を、図5に示すフローチャートに基づいて説明する。
以下、モード遷移コントローラ47にて実行される運転支援モード切り替え制御処理作用を、図5に示すフローチャートに基づいて説明する。
まず、運転支援制御の作動が開始されると、「ハンズオンモードM2」が選択されるため、S1→S2→S3→S4へと進む。S4では、「ハンズオンモードM2」から「ハンズオフモードM1」へ切り替えるハンズオフ条件が成立しているか否かが判断される。そして、ハンズオフ条件が不成立と判断されている間は、S1→S2→S3→S4→S6へと進む流れが繰り返される。その後、S4にてハンズオフ条件が成立と判断されると、S4からS5へと進み、S5では、「ハンズオンモードM2」から「ハンズオフモードM1」へとモード遷移される。
「ハンズオフモードM1」が選択されてのレーンキープ走行中は、S1→S2→S7へと進む。S7では、自車の走行ルートの延長上に自車線から連続する車線を認識できない車線消滅領域Sを検出したか否かが判断される。車線消滅領域Sが検出されない間は、S1→S2→S7→S6へと進む流れが繰り返される。その後、S7にて車線消滅領域Sが検出されたと判断されると、S7からS8へと進み、S8では、自車が車線消滅領域Sに向かって走行ルートに沿って走行することを想定したとき、車線変更を要しないか否かが判断される。S8にて車線変更を要しないと判断されるとS9へ進み、S8にて車線変更を要すると判断されるとS10へ進む。S9では、車線消滅開始点Ps1から第1距離X1の位置が第1位置P1に設定され、S10では、車線変更開始点Pe1が第1位置P1に設定される。
次のS11では、車線消滅領域Sの手前に旋回半径が所定値以下のカーブ路Cが無いか否かが判断され、カーブ路Cが無い場合はS11からS12へ進み、カーブ路Cが有る場合はS11からS13へ進む。S12では、車線消滅開始点Ps1から第1距離X1より短い第2距離X2の位置が第2位置P2に設定される。ステップS13では、カーブ路開始点Pc1から第1距離X1より短い第2距離X2の位置が第2位置P2に設定される。
次のS14では、自車が第1位置P1に到達したか否かが判断され、第1位置P1に到達するとS15へ進む。S15では、「ハンズオフモードM1」から「ハンズオンモードM2」へのモード遷移が要求される。そして、S16では、所定時間以内にハンドルを握ったか否かが判断され、所定時間以内にハンドルを握った場合はS17へ進み、所定時間以内にハンドルを握っていない場合はS23へ進む。
次のS17では、自車が第2位置P2に到達したか否かが判断され、第2位置P2に到達するとS18へ進む。S18では、「ハンズオンモードM2」から「ハンドル操作モードM3」へのモード遷移が要求される。次のS19では、自車が車線消滅開始点Ps1に到達したか否かが判断される。S19にて車線消滅開始点Ps1に到達したと判断されるとS21へ進み、S21では、「ハンドル操作モードM3」から「ハンドル支援解除モードM4」へモード遷移され、S6へ進む。
次のS20では、ハンドル操作をしたか否かが判断され、ハンドル操作したと判断されるとS21へ進み、S21では、「ハンドル操作モードM3」から「ハンドル支援解除モードM4」へモード遷移され、S6へ進む。
一方、S20にてハンドル操作をしていないと判断されるとS22へ進み、S22では、M3で所定時間経過したか否かが判断される。「ハンドル操作モードM3」で所定時間経過していないと判断されると、S19→S20→S22へと進む流れが繰り返される。そして、車線消滅開始点Ps1に到達していなく、かつ、ハンドル操作をしていない状態で所定時間を経過すると、S23へ進む。S23では自車を減速・停止させ、S24では運転支援制御(縦制御+横制御)が解除されて運転支援制御が終了する。
S21での「ハンドル支援解除モードM4」へのモード遷移により、「ハンドル支援解除モードM4」が選択されると、S21からS6→S1→S32へと進み、S32では、自車が車線消滅領域Sを通過して車線消滅終了点Ps2に到達したか否かが判断される。車線消滅終了点Ps2に到達していない間は、S6→S1→S32へと進む流れが繰り返され、「ハンドル支援解除モードM4」の選択が維持される。S32にて車線消滅終了点Ps2に到達したと判断されるとS33へ進む。
S33では、前方認識カメラにより車線認識が再開されたか否かが判断される。その後、車線認識が再開された場合は、S33からS34へ進み、S34では、「ハンドル支援解除モードM4」から「ハンズオンモードM2」へモード遷移され、S6へ進む。その後、S1→S2→S3→S4へと進み、S4にてハンズオフ条件が成立と判断されると、S4からS5へと進み、S5では、「ハンズオンモードM2」から「ハンズオフモードM1」へとモード遷移され、「ハンズオフモードM1」へモード復帰する。
このように、「ハンズオフモードM1」→「ハンズオンモードM2」→「ハンドル操作モードM3」→「ハンドル支援解除モードM4」へと進むモード遷移制御処理は、第1位置P1と第2位置P2の設定が相違する下記の(a)~(d)に分けられる。
(a) 車線変更が不要で、かつ、カーブ路Cが無いときは、第1位置P1を車線消滅開始点Ps1から第1距離X1の位置に設定し、第2位置P2を車線消滅開始点Ps1から第1距離X1より短い第2距離X2の位置に設定する。
(b) 車線変更が不要で、かつ、カーブ路Cが有るときは、第1位置P1をカーブ路開始点Pc1から第1距離X1の位置に設定し、第2位置P2をカーブ路開始点Pc1から第1距離X1より短い第2距離X2の位置に設定する。
(c) 車線変更が必要で、かつ、カーブ路Cが無いときは、第1位置P1を車線変更開始点Pe1に設定し、第2位置P2を車線消滅開始点Ps1から第2距離X2の位置に設定する。
(d) 車線変更が必要で、かつ、カーブ路Cが有るときは、第1位置P1を車線変更開始点Pe1に設定し、第2位置P2をカーブ路開始点Pc1から第2距離X2の位置に設定する。
(a) 車線変更が不要で、かつ、カーブ路Cが無いときは、第1位置P1を車線消滅開始点Ps1から第1距離X1の位置に設定し、第2位置P2を車線消滅開始点Ps1から第1距離X1より短い第2距離X2の位置に設定する。
(b) 車線変更が不要で、かつ、カーブ路Cが有るときは、第1位置P1をカーブ路開始点Pc1から第1距離X1の位置に設定し、第2位置P2をカーブ路開始点Pc1から第1距離X1より短い第2距離X2の位置に設定する。
(c) 車線変更が必要で、かつ、カーブ路Cが無いときは、第1位置P1を車線変更開始点Pe1に設定し、第2位置P2を車線消滅開始点Ps1から第2距離X2の位置に設定する。
(d) 車線変更が必要で、かつ、カーブ路Cが有るときは、第1位置P1を車線変更開始点Pe1に設定し、第2位置P2をカーブ路開始点Pc1から第2距離X2の位置に設定する。
[運転支援モード切り替え制御作用]
以下、「ハンズオフモードM1」によるレーンキープ走行において車線消滅領域Sへ向かうときの運転支援モード切り替え制御作用を、上記(a)~(d)に対応する異なる4つの走行シーンに分けて説明する。
以下、「ハンズオフモードM1」によるレーンキープ走行において車線消滅領域Sへ向かうときの運転支援モード切り替え制御作用を、上記(a)~(d)に対応する異なる4つの走行シーンに分けて説明する。
(車線変更不要・カーブ路無し走行シーン:図7)
車線変更が不要で、かつ、カーブ路Cが無いとき、図7に示すように、第1位置P1は車線消滅開始点Ps1から第1距離X1(道路の制限速度等により異なるが、例えば、800m程度)の位置に設定される。第2位置P2は車線消滅開始点Ps1から第1距離X1より短い第2距離X2(道路の制限速度等により異なるが、例えば、150m程度)の位置に設定される。
車線変更が不要で、かつ、カーブ路Cが無いとき、図7に示すように、第1位置P1は車線消滅開始点Ps1から第1距離X1(道路の制限速度等により異なるが、例えば、800m程度)の位置に設定される。第2位置P2は車線消滅開始点Ps1から第1距離X1より短い第2距離X2(道路の制限速度等により異なるが、例えば、150m程度)の位置に設定される。
本線上の料金所へ「ハンズオフモードM1」で向かうレーンキープ走行中、高精度地図データに基づいて、自車の走行ルートの延長上に自車線から連続する車線を認識できない料金所(車線消滅領域S)を検出したとする。この場合、料金所が検出されると車線消滅開始点Ps1及び車線消滅終了点Ps2の情報が取得される。そして、自車位置と車線消滅開始点Ps1との間に、車線消滅開始点Ps1を起点とする第1位置P1と第2位置P2が設定される。
「ハンズオフモードM1」を選択してレーンキープ走行している自車が検出位置P0から第1位置P1に到達すると、「ハンズオフモードM1」から「ハンズオンモードM2」へのモード遷移が要求される。その後、自車が第2位置P2に到達すると、「ハンズオンモードM2」から「ハンドル操作モードM3」へのモード遷移が要求される。その後、自車が車線消滅開始点Ps1に到達すると、「ハンドル操作モードM3」から「ハンドル支援解除モードM4」へモード遷移される。
「ハンドル支援解除モードM4」が選択されている自車が料金所に入ると、ドライバーはハンドル操作をしながら料金所を通過し、車線消滅終了点Ps2に到達する。そして、車線消滅終了点Ps2に到達への直後、位置P3にて車線の認識が再開されると、「ハンドル支援解除モードM4」から「ハンズオンモードM2」へのモード遷移が要求される。さらに、「ハンズオンモードM2」でのレーンキープ走行中、位置P4にてハンズオフ条件が成立すると、「ハンズオンモードM2」から「ハンズオフモードM1」へとモード遷移される。
(車線変更不要・カーブ路有り走行シーン:図8)
車線変更が不要で、かつ、カーブ路Cが有るとき、図8に示すように、第1位置P1はカーブ路開始点Pc1から第1距離X1の位置に設定される。第2位置P2はカーブ路開始点Pc1から第1距離X1より短い第2距離X2の位置に設定される。
車線変更が不要で、かつ、カーブ路Cが有るとき、図8に示すように、第1位置P1はカーブ路開始点Pc1から第1距離X1の位置に設定される。第2位置P2はカーブ路開始点Pc1から第1距離X1より短い第2距離X2の位置に設定される。
本線上のカーブ路C及び料金所へ「ハンズオフモードM1」で向かうレーンキープ走行中、高精度地図データに基づいて、自車の走行ルートの延長上にカーブ路C及び自車線から連続する車線を認識できない料金所(車線消滅領域S)を検出したとする。この場合、カーブ路Cが検出されるとカーブ路開始点Pc1及びカーブ路終了点Pc2の情報が取得され、料金所が検出されると車線消滅開始点Ps1及び車線消滅終了点Ps2の情報が取得される。そして、自車位置と車線消滅開始点Ps1との間に、カーブ路開始点Pc1を起点とする第1位置P1と第2位置P2が設定される。
「ハンズオフモードM1」を選択してレーンキープ走行している自車が検出位置P0から第1位置P1に到達すると、「ハンズオフモードM1」から「ハンズオンモードM2」へのモード遷移が要求される。そして、自車が第2位置P2に到達すると、「ハンズオンモードM2」から「ハンドル操作モードM3」へのモード遷移が要求される。
その後、自車がカーブ路開始点Pc1に入ると、カーブ路終了点Pc2までのカーブ路Cを「ハンドル操作モードM3」による旋回走行により抜ける。そして、車線消滅開始点Ps1へ到達すると、「ハンドル操作モードM3」から「ハンドル支援解除モードM4」へモード遷移される。
「ハンドル支援解除モードM4」が選択されている自車が料金所に入ると、ドライバーはハンドル操作をしながら料金所を通過し、車線消滅終了点Ps2に到達する。そして、車線消滅終了点Ps2に到達すると、高速道路が終了したため、その後も「ハンドル支援解除モードM4」が維持される。
(車線変更必要・カーブ路無し走行シーン:図9)
車線変更が必要で、かつ、カーブ路Cが無いとき、図9に示すように、第1位置P1は車線変更開始点Pe1の位置に設定される。第2位置P2は車線消滅開始点Ps1から第2距離X2の位置に設定される。
車線変更が必要で、かつ、カーブ路Cが無いとき、図9に示すように、第1位置P1は車線変更開始点Pe1の位置に設定される。第2位置P2は車線消滅開始点Ps1から第2距離X2の位置に設定される。
分岐先の料金所へ「ハンズオフモードM1」で向かうレーンキープ走行中、高精度地図データに基づいて、自車の走行ルートの延長上に分岐路Y及び自車線から連続する車線を認識できない料金所(車線消滅領域S)を検出したとする。この場合、分岐路Yが検出されるとルート走行支援機能による車線変更開始点Pe1及び車線変更完了点Pe2の情報が取得される。料金所が検出されると車線消滅開始点Ps1及び車線消滅終了点Ps2の情報が取得される。そして、自車位置と車線消滅開始点Ps1との間に、第1位置P1(=車線変更開始点Pe1)と車線消滅開始点Ps1を起点とする第2位置P2が設定される。
「ハンズオフモードM1」を選択してレーンキープ走行している自車が第1位置P1(=Pe1)に到達すると、「ハンズオフモードM1」から「ハンズオンモードM2」へのモード遷移が要求され、ルート走行支援機能による車線変更が開始される。そして、自車が分岐路Yに入って車線変更し、車線変更完了点Pe2まで進むことにより車線変更が終了する。
車線変更が終了した後、自車が第2位置P2に到達すると、「ハンズオンモードM2」から「ハンドル操作モードM3」へのモード遷移が要求される。その後、車線消滅開始点Ps1へ到達すると、「ハンドル操作モードM3」から「ハンドル支援解除モードM4」へモード遷移される。
「ハンドル支援解除モードM4」が選択されている自車が料金所に入ると、ドライバーはハンドル操作をしながら料金所を通過し、車線消滅終了点Ps2に到達する。そして、車線消滅終了点Ps2に到達すると、高速道路が終了したため、その後も「ハンドル支援解除モードM4」が維持される。
(車線変更必要・カーブ路有り走行シーン:図10)
車線変更が必要で、かつ、カーブ路Cが有るとき、図10に示すように、第1位置P1は車線変更開始点Pe1の位置に設定される。第2位置P2はカーブ路開始点Pc1から第2距離X2の位置に設定される。
車線変更が必要で、かつ、カーブ路Cが有るとき、図10に示すように、第1位置P1は車線変更開始点Pe1の位置に設定される。第2位置P2はカーブ路開始点Pc1から第2距離X2の位置に設定される。
分岐先のカーブ路C及び料金所へ「ハンズオフモードM1」で向かうレーンキープ走行中、高精度地図データに基づいて、自車の走行ルートの延長上に分岐路Y、カーブ路C及び自車線から連続する車線を認識できない料金所(車線消滅領域S)を検出したとする。この場合、分岐路Yが検出されるとルート走行支援機能による車線変更開始点Pe1及び車線変更完了点Pe2の情報が取得される。カーブ路Cが検出されるとカーブ路開始点Pc1及びカーブ路終了点Pc2の情報が取得される。料金所が検出されると車線消滅開始点Ps1及び車線消滅終了点Ps2の情報が取得される。そして、自車位置と車線消滅開始点Ps1との間に、第1位置P1(=車線変更開始点Pe1)と車線消滅開始点Ps1を起点とする第2位置P2が設定される。
「ハンズオフモードM1」を選択してレーンキープ走行している自車が第1位置P1(=Pe1)に到達すると、「ハンズオフモードM1」から「ハンズオンモードM2」へのモード遷移が要求され、ルート走行支援機能による車線変更が開始される。そして、自車が分岐路Yに入って車線変更し、車線変更完了点Pe2まで進むことにより車線変更が終了する。そして、自車が第2位置P2に到達すると、「ハンズオンモードM2」から「ハンドル操作モードM3」へのモード遷移が要求される。
その後、自車がカーブ路開始点Pc1に入ると、カーブ路終了点Pc2までのカーブ路Cを「ハンドル操作モードM3」による旋回走行により抜ける。そして、車線消滅開始点Ps1へ到達すると、「ハンドル操作モードM3」から「ハンドル支援解除モードM4」へモード遷移される。
なお、「ハンドル支援解除モードM4」が選択されている自車が料金所に入ると、ドライバーはハンドル操作をしながら料金所を通過し、車線消滅終了点Ps2に到達する。そして、車線消滅終了点Ps2に到達すると、高速道路が終了したため、その後も「ハンドル支援解除モードM4」が維持される。
以上説明したように、実施例1の運転支援方法及び運転支援装置にあっては、下記に列挙する効果を奏する。
(1) ドライバーの運転操作を支援する運転支援機能として車速・車間制御機能とレーンキープ機能を有し、運転支援モードを遷移するモード遷移コントローラ47による運転支援方法であって、運転支援モードとして、ドライバーがハンドル23から手を離すことを許可する「ハンズオフモードM1」と、ドライバーがハンドル23を手で握ることを条件とする「ハンドル把持モードM2、M3」と、レーンキープ機能を解除する「ハンドル支援解除モードM4」と、を有し、「ハンズオフモードM1」が選択されているレーンキープ走行中、自車の走行ルートの延長上に自車線から連続する車線を認識できない車線消滅領域Sを検出し、車線消滅領域Sが検出されると車線消滅開始点Ps1の情報を取得し、自車位置と車線消滅開始点Ps1との間にモード遷移位置(第1位置P1、第2位置P2)を設定し、自車がモード遷移位置に到達すると、「ハンズオフモードM1」から「ハンドル把持モードM2、M3」へのモード遷移を要求し、ドライバーによるハンドル23の把持が確認された場合、自車が車線消滅開始点Ps1に到達するまでに、「ハンドル把持モードM2、M3」から「ハンドル支援解除モードM4」へモード遷移する(図4)。
このため、運転支援レベルを上げた運転支援モードでの走行シーンにおいて、ハンドル支援解除が事前に把握されると運転支援レベルを段階的に下げることで、システムからドライバーへの委譲をより確実に行う運転支援方法を提供することができる。
このため、運転支援レベルを上げた運転支援モードでの走行シーンにおいて、ハンドル支援解除が事前に把握されると運転支援レベルを段階的に下げることで、システムからドライバーへの委譲をより確実に行う運転支援方法を提供することができる。
(2) 「ハンドル把持モードM2,M3」へのモード遷移を要求した後、車線消滅開始点Ps1に到達するまでにドライバーによるハンドル把持を確認できなかった場合、自車を減速・停止させた後、運転支援機能である車速・車間制御機能とレーンキープ機能を解除する(図5のS23、S24)。
このため、車線消滅開始点Ps1に到達するまでにドライバーによるハンドル把持を確認できなかった場合、減速・停止を経由して制御解除することでフェールセーフ機能を達成することができる。
このため、車線消滅開始点Ps1に到達するまでにドライバーによるハンドル把持を確認できなかった場合、減速・停止を経由して制御解除することでフェールセーフ機能を達成することができる。
(3) モード遷移位置(第1位置P1、第2位置P2)は、「ハンズオフモードM1」が選択されているレーンキープ走行中、自車の走行ルートの延長上に車線消滅領域Sが検出されると、その後、車線消滅開始点Ps1に到達したときに自車を減速・停止できるように逆算して設定する(図5のS9、S10,S12、S13)。
このため、モード遷移位置(第1位置P1、第2位置P2)を、車線消滅開始点Ps1に到達したときに自車を減速・停止できる適切な位置に設定することができる。
このため、モード遷移位置(第1位置P1、第2位置P2)を、車線消滅開始点Ps1に到達したときに自車を減速・停止できる適切な位置に設定することができる。
(4) ハンドル把持モードとして、ドライバーがハンドルに手を添えることを条件とする「ハンズオンモードM2」と、ハンドル操作をドライバーに促す「ハンドル操作モードM3」と、を有し、車線消滅開始点Ps1の情報が取得されると、自車位置と車線消滅開始点Ps1との間に第1位置P1と第2位置P2を設定し、自車が第1位置P1に到達すると、「ハンズオフモードM1」から「ハンズオンモードM2」へのモード遷移を要求し、自車が第2位置P2に到達すると、「ハンズオンモードM2」から「ハンドル操作モードM3」へのモード遷移を要求し、ドライバーによるハンドル23を握ったことが確認されている状態で自車が車線消滅開始点Ps1に到達するまでに、「ハンドル操作モードM3」から「ハンドル支援解除モードM4」へモード遷移する(図5のS16→S17→S18→S19→S21)。
このため、「ハンズオフモードM1」でのレーンキープ走行シーンにおいて、ドライバーによるハンドル23を握ったことが確認されている状態で自車が車線消滅開始点Ps1に到達するまでに、システムからドライバーへの委譲を違和感なく確保することができる。
このため、「ハンズオフモードM1」でのレーンキープ走行シーンにおいて、ドライバーによるハンドル23を握ったことが確認されている状態で自車が車線消滅開始点Ps1に到達するまでに、システムからドライバーへの委譲を違和感なく確保することができる。
(5) 「ハンズオンモードM2」から「ハンドル操作モードM3」へのモード遷移を要求した後、自車が車線消滅開始点Ps1に到達する前にハンドル操作をしたことが検出されると、「ハンドル操作モードM3」から「ハンドル支援解除モードM4」へモード遷移する(図5のS19→S20→S21)。
このため、「ハンズオフモードM1」でのレーンキープ走行シーンにおいて、自車が車線消滅開始点Ps1に到達する前にハンドル操作をしたことが検出されると、システムからドライバーへの委譲を違和感なく確保することができる。
このため、「ハンズオフモードM1」でのレーンキープ走行シーンにおいて、自車が車線消滅開始点Ps1に到達する前にハンドル操作をしたことが検出されると、システムからドライバーへの委譲を違和感なく確保することができる。
(6) 「ハンズオフモードM1」から「ハンズオンモードM2」へのモード遷移を要求した後、ドライバーがハンドル23に手を添えたか否かをタッチセンサ92により監視し、「ハンズオンモードM2」から「ハンドル操作モードM3」へのモード遷移を要求した後、ドライバーがハンドル操作したか否かをトルクセンサ93により監視する(図5のS16、S20)。
このため、ハンドル把持モードとして「ハンズオンモードM2」と「ハンドル操作モードM3」を有するとき、ドライバーのハンドル23に対する行動形態を2つのモードのそれぞれに分け、精度よく監視することができる。
このため、ハンドル把持モードとして「ハンズオンモードM2」と「ハンドル操作モードM3」を有するとき、ドライバーのハンドル23に対する行動形態を2つのモードのそれぞれに分け、精度よく監視することができる。
(7) 「ハンズオフモードM1」によるレーンキープ走行路が自車の車線変更を要しない道路である場合、第1位置P1を車線消滅開始点Ps1から第1距離X1の位置に設定し、第2位置P2を車線消滅開始点Ps1から第1距離X1より短い第2距離X2の位置に設定する(図5のS9、S12)。
このため、「ハンズオフモードM1」によるレーンキープ走行路が自車の車線変更を要しない道路である場合、第1位置P1と第2位置P2を、車線消滅開始点Ps1を起点として設定することができる。
このため、「ハンズオフモードM1」によるレーンキープ走行路が自車の車線変更を要しない道路である場合、第1位置P1と第2位置P2を、車線消滅開始点Ps1を起点として設定することができる。
(8) ドライバーが目的地を設定している場合、走行ルートに沿って走行するために必要な車線変更開始点Pe1に到達し、ドライバー操作により車線変更を行う意思が確認されると、ステアリング制御により車線変更を支援するルート走行支援機能を有し、「ハンズオフモードM1」によるレーンキープ走行路が自車の車線変更を要する道路である場合、第1位置P1を車線変更開始点Pe1に設定し、第2位置P2を車線消滅開始点Ps1から所定距離(第2距離X2)だけ離れた位置に設定する(図5のS10)。
このため、「ハンズオフモードM1」によるレーンキープ走行路が自車の車線変更を要する道路である場合、第1位置P1を、車線変更開始点Pe1に設定することができ、第2位置P2を、車線消滅開始点Ps1を起点として設定することができる。加えて、車線変更を要する道路である場合、ドライバーによる目的地の設定に基づいて走行ルートが生成されていることを条件とし(ナビゲーションシステム7との連動)、ルート走行支援機能を利用して車線変更を行うことができる。
このため、「ハンズオフモードM1」によるレーンキープ走行路が自車の車線変更を要する道路である場合、第1位置P1を、車線変更開始点Pe1に設定することができ、第2位置P2を、車線消滅開始点Ps1を起点として設定することができる。加えて、車線変更を要する道路である場合、ドライバーによる目的地の設定に基づいて走行ルートが生成されていることを条件とし(ナビゲーションシステム7との連動)、ルート走行支援機能を利用して車線変更を行うことができる。
(9) 第1位置P1又は第2位置P2を設定する際、車線消滅領域Sの手前側に旋回半径が所定値以下のカーブ路Cが有る場合、位置を設定する起点を車線消滅開始点Ps1からカーブ路Cのカーブ路開始点Pc1に変更する(図5のS13)。
このため、車線消滅領域Sの手前側に旋回半径が所定値以下のカーブ路Cが有る場合、カーブ路Cの途中位置にモード遷移位置が設定されるのが回避され、安定したレーンキープ走行によりカーブ路Cを抜けることができる。
このため、車線消滅領域Sの手前側に旋回半径が所定値以下のカーブ路Cが有る場合、カーブ路Cの途中位置にモード遷移位置が設定されるのが回避され、安定したレーンキープ走行によりカーブ路Cを抜けることができる。
(10) 車線消滅領域Sの手前側に旋回半径が所定値以下のカーブ路Cが有る場合、「ハンドル操作モードM3」でのカーブ連動減速の目標横加速度を、「ハンズオンモードM2」、「ハンズオフモードM1」、「ハンドル支援解除モードM4」でのカーブ連動減速の目標横加速度の値よりも低くする。
このため、カーブ路Cでドライバーにハンドル操作を受け渡す際の車速を他のモードに比べて低くことによって、ドライバーに安心感を与えることができる。また、受け渡し後にドライバーが操作感を調整する時間を長く確保することができる。
このため、カーブ路Cでドライバーにハンドル操作を受け渡す際の車速を他のモードに比べて低くことによって、ドライバーに安心感を与えることができる。また、受け渡し後にドライバーが操作感を調整する時間を長く確保することができる。
(11) 「ハンドル支援解除モードM4」が選択されている自車が車線消滅領域Sを通過して車線消滅終了点Ps2に到達し、かつ、車線の認識が再開されると、「ハンドル支援解除モードM4」から「ハンズオンモードM2」へモード遷移し(図5のS32→S33→S34)、「ハンズオンモードM2」でのレーンキープ走行中、ハンズオフ条件が成立すると、「ハンズオンモードM2」から「ハンズオフモードM1」へモード遷移する(図5のS3→S4→S5)。
このため、ハンドル支援制御が解除された場合であっても、「ハンズオフモードM1」への復帰の途を開いておくことで、「ハンズオフモードM1」を選択してのレーンキープ走行区間を長く確保することができる。即ち、車線の認識が再開されたことを条件として「ハンドル支援解除モードM4」から「ハンズオンモードM2」へ復帰できるし、さらに、「ハンズオンモードM2」の選択中にハンズオフ条件が成立すると「ハンズオフモードM1」へ復帰できる。
このため、ハンドル支援制御が解除された場合であっても、「ハンズオフモードM1」への復帰の途を開いておくことで、「ハンズオフモードM1」を選択してのレーンキープ走行区間を長く確保することができる。即ち、車線の認識が再開されたことを条件として「ハンドル支援解除モードM4」から「ハンズオンモードM2」へ復帰できるし、さらに、「ハンズオンモードM2」の選択中にハンズオフ条件が成立すると「ハンズオフモードM1」へ復帰できる。
(12) ドライバーの運転操作を支援する運転支援機能として車速・車間制御機能とレーンキープ機能を有し、運転支援モードを遷移するモード遷移コントローラ47を備える運転支援装置であって、運転支援モードとして、ドライバーがハンドルから手を離すことを許可する「ハンズオフモードM1」と、ドライバーがハンドル23を手で握ることを条件とする「ハンドル把持モードM2、M3」と、レーンキープ機能を解除する「ハンドル支援解除モードM4」と、を有し、モード遷移コントローラ47は、「ハンズオフモードM1」が選択されているレーンキープ走行中、自車の走行ルートの延長上に自車線から連続する車線を認識できない車線消滅領域Sを検出する車線消滅領域検出部471と、車線消滅領域Sが検出されると車線消滅開始点Ps1の情報を取得し、自車位置と車線消滅開始点Ps1との間にモード遷移位置(第1位置P1、第2位置P2)を設定する位置設定部472と、自車がモード遷移位置に到達すると、「ハンズオフモードM1」から「ハンドル把持モードM2、M3」へのモード遷移を要求するモード遷移要求部(ハンズオンモード遷移要求部473、ハンドル操作モード遷移要求部474)と、ドライバーによるハンドル23の把持が確認された場合、自車が車線消滅開始点Ps1に到達するまでに、「ハンドル把持モードM2、M3」から「ハンドル支援解除モードM4」へモード遷移するハンドル支援解除モード遷移部475と、を有する(図4)。
このため、運転支援レベルを上げたモードでの走行シーンにおいて、ハンドル支援解除が事前に把握されると運転支援レベルを段階的に下げることで、システムからドライバーへの委譲をより確実に行う運転支援装置を提供することができる。
このため、運転支援レベルを上げたモードでの走行シーンにおいて、ハンドル支援解除が事前に把握されると運転支援レベルを段階的に下げることで、システムからドライバーへの委譲をより確実に行う運転支援装置を提供することができる。
以上、本開示の運転支援方法及び運転支援装置を実施例1に基づき説明してきた。しかし、具体的な構成については、この実施例1に限られるものではなく、請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
実施例1では、モード遷移コントローラ47として、「ハンズオフモードM1」→「ハンズオンモードM2」→「ハンドル操作モードM3」→「ハンドル支援解除モードM4」へモード遷移する例を示した。しかし、モード遷移コントローラとしては、「ハンズオフモード」と「ハンドル支援解除モード」との間に、ドライバーがハンドルを持っていることが確認できるモードを、少なくとも1以上有するものであれば良い。例えば、「ハンズオフモード」→「ハンドル把持モード」→「ハンドル支援解除モード」へモード遷移する例としても良い。さらに、「ハンズオフモード」→「ハンズオンモード」→「ハンドル把持モード」→「ハンドル操作モード」→「ハンドル支援解除モード」へモード遷移する例としても良い。
実施例1では、本開示の運転支援方法及び運転支援装置を、ドライバーの運転操作を支援する先進運転支援システムADASを搭載した運転支援車両に適用する例を示した。しかし、本開示の運転支援方法及び運転支援装置は、自動運転モードを選択すると、目標走行軌跡にしたがって駆動/制動/舵角の操作支援制御を行い、自動運転(AD)にて走行する自動運転車両に適用することができる。
Claims (17)
- ドライバーの運転操作を支援する運転支援機能として車速・車間制御機能とレーンキープ機能を有し、運転支援モードを遷移するモード遷移コントローラによる運転支援方法であって、
前記運転支援モードとして、ドライバーがハンドルから手を離すことを許可するハンズオフモードと、ドライバーがハンドルを手で握ることを条件とするハンドル把持モードと、前記レーンキープ機能を解除するハンドル支援解除モードと、を有し、
前記ハンズオフモードが選択されているレーンキープ走行中、自車の走行ルートの延長上に自車線から連続する車線を認識できない車線消滅領域を検出し、
前記車線消滅領域が検出されると車線消滅開始点の情報を取得し、自車位置と前記車線消滅開始点との間にモード遷移位置を設定し、
自車が前記モード遷移位置に到達すると、前記ハンズオフモードから前記ハンドル把持モードへのモード遷移を要求し、
ドライバーによるハンドルの把持が確認された場合、自車が前記車線消滅開始点に到達するまでに、前記ハンドル把持モードから前記ハンドル支援解除モードへモード遷移する
ことを特徴とする運転支援方法。 - 請求項1に記載された運転支援方法において、
前記ハンドル把持モードへのモード遷移を要求した後、前記車線消滅開始点に到達するまでにドライバーによるハンドル把持を確認できなかった場合、自車を減速・停止させた後、運転支援機能である車速・車間制御機能とレーンキープ機能を解除する
ことを特徴とする運転支援方法。 - 請求項2に記載された運転支援方法において、
前記モード遷移位置は、前記ハンズオフモードが選択されているレーンキープ走行中、自車の走行ルートの延長上に前記車線消滅領域が検出されると、その後、前記車線消滅開始点に到達したときに自車を減速・停止できるように逆算して設定する
ことを特徴とする運転支援方法。 - 請求項1から3までの何れか一項に記載された運転支援方法において、
前記ハンドル把持モードとして、ドライバーがハンドルに手を添えることを条件とするハンズオンモードと、ハンドル操作をドライバーに促すハンドル操作モードと、を有し、
前記車線消滅開始点の情報が取得されると、自車位置と前記車線消滅開始点との間に第1位置と第2位置を設定し、
自車が前記第1位置に到達すると、前記ハンズオフモードから前記ハンズオンモードへのモード遷移を要求し、
自車が前記第2位置に到達すると、前記ハンズオンモードから前記ハンドル操作モードへのモード遷移を要求し、
ドライバーによるハンドルを握ったことが確認されている状態で自車が前記車線消滅開始点に到達するまでに、前記ハンドル操作モードから前記ハンドル支援解除モードへモード遷移する
ことを特徴とする運転支援方法。 - 請求項4に記載された運転支援方法において、
前記ハンズオンモードから前記ハンドル操作モードへのモード遷移を要求した後、自車が前記車線消滅開始点に到達する前にハンドル操作をしたことが検出されると、前記ハンドル操作モードから前記ハンドル支援解除モードへモード遷移する
ことを特徴とする運転支援方法。 - 請求項4又は5に記載された運転支援方法において、
前記ハンズオフモードから前記ハンズオンモードへのモード遷移を要求した後、ドライバーがハンドルに手を添えたか否かをタッチセンサにより監視し、
前記ハンズオンモードから前記ハンドル操作モードへのモード遷移を要求した後、ドライバーがハンドル操作したか否かをトルクセンサにより監視する
ことを特徴とする運転支援方法。 - 請求項4又は5に記載された運転支援方法において、
前記ハンズオフモードによるレーンキープ走行路が自車の車線変更を要しない道路である場合、前記第1位置を前記車線消滅開始点から第1距離の位置に設定し、前記第2位置を前記車線消滅開始点から前記第1距離より短い第2距離の位置に設定する
ことを特徴とする運転支援方法。 - 請求項4から7までの何れか一項に記載された運転支援方法において、
ドライバーが目的地を設定している場合、走行ルートに沿って走行するために必要な車線変更開始点に到達し、ドライバー操作により車線変更を行う意思が確認されると、ステアリング制御により車線変更を支援するルート走行支援機能を有し、
前記ハンズオフモードによるレーンキープ走行路が自車の車線変更を要する道路である場合、前記第1位置を前記車線変更開始点に設定し、前記第2位置を前記車線消滅開始点から所定距離だけ離れた位置に設定する
ことを特徴とする運転支援方法。 - 請求項4から8までの何れか一項に記載された運転支援方法において、
前記第1位置又は第2位置を設定する際、前記車線消滅領域の手前側に旋回半径が所定値以下のカーブ路が有る場合、位置を設定する起点を前記車線消滅開始点から前記カーブ路のカーブ路開始点に変更する
ことを特徴とする運転支援方法。 - 請求項9に記載された運転支援方法において、
前記車線消滅領域の手前側に旋回半径が所定値以下のカーブ路が有る場合、前記ハンドル操作モードでのカーブ連動減速の目標横加速度を、前記ハンズオンモード、前記ハンズオフモード、前記ハンドル支援解除モードでのカーブ連動減速の目標横加速度の値よりも低くする
ことを特徴とする運転支援方法。 - 請求項4から10までの何れか一項に記載された運転支援方法において、
前記ハンドル支援解除モードが選択されている自車が前記車線消滅領域を通過して車線消滅終了点に到達し、かつ、車線の認識が再開されると、前記ハンドル支援解除モードから前記ハンズオンモードへモード遷移し、
前記ハンズオンモードでのレーンキープ走行中、ハンズオフ条件が成立すると、前記ハンズオンモードから前記ハンズオフモードへモード遷移する
ことを特徴とする運転支援方法。 - 請求項1から11までの何れか一項に記載された運転支援方法において、
前記車線消滅領域は、地図データに車線情報がない出口箇所である
ことを特徴とする運転支援方法。 - 請求項1から11までの何れか一項に記載された運転支援方法において、
前記車線消滅領域は、地図データに車線がないという情報がある料金所である
ことを特徴とする運転支援方法。 - 請求項1から11までの何れか一項に記載された運転支援方法において、
前記車線消滅領域は、地図データに車線がないという情報がある無車線区間である
ことを特徴とする運転支援方法。 - 請求項1から11までの何れか一項に記載された運転支援方法において、
前記車線消滅領域は、地図データに合流により自車線が消滅するという情報がある合流箇所である
ことを特徴とする運転支援方法。 - 請求項1から11までの何れか一項に記載された運転支援方法において、
前記車線消滅領域は、地図データに車線減少により自車線が消滅するという情報がある車線減少箇所である
ことを特徴とする運転支援方法。 - ドライバーの運転操作を支援する運転支援機能として車速・車間制御機能とレーンキープ機能を有し、運転支援モードを遷移するモード遷移コントローラを備える運転支援装置であって、
前記運転支援モードとして、ドライバーがハンドルから手を離すことを許可するハンズオフモードと、ドライバーがハンドルを手で握ることを条件とするハンドル把持モードと、前記レーンキープ機能を解除するハンドル支援解除モードと、を有し、
前記モード遷移コントローラは、
前記ハンズオフモードが選択されているレーンキープ走行中、自車の走行ルートの延長上に自車線から連続する車線を認識できない車線消滅領域を検出する車線消滅領域検出部と、
前記車線消滅領域が検出されると車線消滅開始点の情報を取得し、自車位置と前記車線消滅開始点との間にモード遷移位置を設定する位置設定部と、
自車が前記モード遷移位置に到達すると、前記ハンズオフモードから前記ハンドル把持モードへのモード遷移を要求するモード遷移要求部と、
ドライバーによるハンドルの把持が確認された場合、自車が前記車線消滅開始点に到達するまでに、前記ハンドル把持モードから前記ハンドル支援解除モードへモード遷移するハンドル支援解除モード遷移部と、を有する
ことを特徴とする運転支援装置。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23208267.7A EP4336475A1 (en) | 2019-05-15 | 2019-05-15 | Driving assistance method and driving assistance device |
| RU2021134012A RU2767830C1 (ru) | 2019-05-15 | 2019-05-15 | Способ помощи при вождении и устройство помощи при вождении |
| US17/605,592 US11492015B2 (en) | 2019-05-15 | 2019-05-15 | Driving assist method and driving assist device |
| JP2021519218A JP7124963B2 (ja) | 2019-05-15 | 2019-05-15 | 運転支援方法及び運転支援装置 |
| CN201980096112.2A CN113785342B (zh) | 2019-05-15 | 2019-05-15 | 驾驶辅助方法及驾驶辅助装置 |
| PCT/JP2019/019398 WO2020230308A1 (ja) | 2019-05-15 | 2019-05-15 | 運転支援方法及び運転支援装置 |
| EP19928311.0A EP3971859B1 (en) | 2019-05-15 | 2019-05-15 | Driving assistance method and driving assistance device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/019398 WO2020230308A1 (ja) | 2019-05-15 | 2019-05-15 | 運転支援方法及び運転支援装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020230308A1 true WO2020230308A1 (ja) | 2020-11-19 |
Family
ID=73289554
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/019398 WO2020230308A1 (ja) | 2019-05-15 | 2019-05-15 | 運転支援方法及び運転支援装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11492015B2 (ja) |
| EP (2) | EP4336475A1 (ja) |
| JP (1) | JP7124963B2 (ja) |
| CN (1) | CN113785342B (ja) |
| RU (1) | RU2767830C1 (ja) |
| WO (1) | WO2020230308A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114261403A (zh) * | 2022-03-03 | 2022-04-01 | 宁波均联智行科技股份有限公司 | 退出自动驾驶时的方向盘信息预警方法及系统 |
| JP7075550B1 (ja) * | 2020-12-10 | 2022-05-25 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| WO2023032123A1 (ja) * | 2021-09-02 | 2023-03-09 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102018216364B4 (de) * | 2018-09-25 | 2020-07-09 | Volkswagen Aktiengesellschaft | Verfahren und Vorrichtung zum Unterstützen eines Spurwechselvorgangs für ein Fahrzeug |
| US11884291B2 (en) * | 2020-08-03 | 2024-01-30 | Waymo Llc | Assigning vehicles for transportation services |
| EP4052983B1 (en) * | 2021-03-04 | 2023-08-16 | Volvo Car Corporation | Method for transitioning a drive mode of a vehicle, drive control system for vehice and vehicle |
| US20230127515A1 (en) * | 2021-10-27 | 2023-04-27 | Ford Global Technologies, Llc | Methods and systems to control driver assist systems |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0986223A (ja) | 1995-09-22 | 1997-03-31 | Mitsubishi Motors Corp | 自動運転装置 |
| JP2017159723A (ja) * | 2016-03-08 | 2017-09-14 | アイシン・エィ・ダブリュ株式会社 | 自動運転支援装置及びコンピュータプログラム |
| JP2018203013A (ja) * | 2017-06-02 | 2018-12-27 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| JP2019010929A (ja) * | 2017-06-29 | 2019-01-24 | 株式会社デンソーテン | 運転支援装置および運転支援方法 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2119617A1 (en) * | 2008-05-12 | 2009-11-18 | IVECO S.p.A. | Vehicle driving aid system for lane changing assistance |
| JP5167051B2 (ja) * | 2008-09-30 | 2013-03-21 | 富士重工業株式会社 | 車両の運転支援装置 |
| DE102011077592A1 (de) * | 2010-12-30 | 2012-07-19 | Hochschule für Technik und Wirtschaft Dresden | Verfahren und Anordnung zur Fahrzeugführung, mittels eines Fahrzeugführungssystems |
| JP5281664B2 (ja) * | 2011-02-23 | 2013-09-04 | クラリオン株式会社 | 車線逸脱警報装置および車線逸脱警報システム |
| KR20140024930A (ko) * | 2011-07-26 | 2014-03-03 | 도요타 지도샤(주) | 차량 특정 시스템 및 차량 특정 장치 |
| US9031729B2 (en) * | 2012-11-29 | 2015-05-12 | Volkswagen Ag | Method and system for controlling a vehicle |
| DE102015004550A1 (de) * | 2015-04-08 | 2016-10-13 | Audi Ag | Verfahren zum Betreiben eines Kraftfahrzeugs und Kraftfahrzeug |
| FR3038280B1 (fr) * | 2015-07-03 | 2019-05-10 | Psa Automobiles Sa. | Dispositif et procede d’aide a la conduite |
| JP2017207885A (ja) | 2016-05-18 | 2017-11-24 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| US11148683B2 (en) * | 2017-06-02 | 2021-10-19 | Honda Motor Co., Ltd. | Vehicle control system, vehicle control method, and program |
| JP7074432B2 (ja) | 2017-06-26 | 2022-05-24 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| CN108327717B (zh) * | 2018-02-06 | 2019-07-02 | 合肥工业大学 | 一种人机共驾的车道偏离辅助系统及其车道偏离辅助方法 |
| JP7055759B2 (ja) * | 2019-01-24 | 2022-04-18 | 本田技研工業株式会社 | 車両制御装置 |
| JP7307550B2 (ja) * | 2019-02-15 | 2023-07-12 | 株式会社Subaru | 車両の運転制御システム |
-
2019
- 2019-05-15 EP EP23208267.7A patent/EP4336475A1/en active Pending
- 2019-05-15 RU RU2021134012A patent/RU2767830C1/ru active
- 2019-05-15 JP JP2021519218A patent/JP7124963B2/ja active Active
- 2019-05-15 EP EP19928311.0A patent/EP3971859B1/en active Active
- 2019-05-15 WO PCT/JP2019/019398 patent/WO2020230308A1/ja unknown
- 2019-05-15 CN CN201980096112.2A patent/CN113785342B/zh active Active
- 2019-05-15 US US17/605,592 patent/US11492015B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0986223A (ja) | 1995-09-22 | 1997-03-31 | Mitsubishi Motors Corp | 自動運転装置 |
| JP2017159723A (ja) * | 2016-03-08 | 2017-09-14 | アイシン・エィ・ダブリュ株式会社 | 自動運転支援装置及びコンピュータプログラム |
| JP2018203013A (ja) * | 2017-06-02 | 2018-12-27 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| JP2019010929A (ja) * | 2017-06-29 | 2019-01-24 | 株式会社デンソーテン | 運転支援装置および運転支援方法 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7075550B1 (ja) * | 2020-12-10 | 2022-05-25 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| WO2023032123A1 (ja) * | 2021-09-02 | 2023-03-09 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP7282280B1 (ja) * | 2021-09-02 | 2023-05-26 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| CN117241973A (zh) * | 2021-09-02 | 2023-12-15 | 本田技研工业株式会社 | 车辆控制装置、车辆控制方法及程序 |
| CN117241973B (zh) * | 2021-09-02 | 2024-03-19 | 本田技研工业株式会社 | 车辆控制装置、车辆控制方法 |
| CN114261403A (zh) * | 2022-03-03 | 2022-04-01 | 宁波均联智行科技股份有限公司 | 退出自动驾驶时的方向盘信息预警方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4336475A1 (en) | 2024-03-13 |
| US11492015B2 (en) | 2022-11-08 |
| EP3971859A1 (en) | 2022-03-23 |
| CN113785342B (zh) | 2024-03-12 |
| CN113785342A (zh) | 2021-12-10 |
| JPWO2020230308A1 (ja) | 2020-11-19 |
| JP7124963B2 (ja) | 2022-08-24 |
| RU2767830C1 (ru) | 2022-03-22 |
| EP3971859B1 (en) | 2023-12-13 |
| EP3971859A4 (en) | 2022-09-14 |
| US20220266869A1 (en) | 2022-08-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2020230308A1 (ja) | 運転支援方法及び運転支援装置 | |
| JP7253840B2 (ja) | 自動運転制御装置及び車両 | |
| CN112638749B (zh) | 车辆的行驶控制方法及行驶控制装置 | |
| JP7004077B2 (ja) | 車両の走行制御方法及び走行制御装置 | |
| WO2020230467A1 (ja) | 運転支援方法及び運転支援装置 | |
| WO2020230312A1 (ja) | 運転支援方法及び運転支援システム | |
| JP7143946B2 (ja) | 車両の走行制御方法及び走行制御装置 | |
| WO2020230306A1 (ja) | 車両の走行制御方法及び走行制御装置 | |
| RU2768687C1 (ru) | Способ управления движением и устройство управления движением для транспортного средства | |
| JP7164030B2 (ja) | 車両の走行制御方法及び走行制御装置 | |
| WO2020230304A1 (ja) | 車両の走行制御方法及び走行制御装置 | |
| JP7268433B2 (ja) | 車両用制御装置 | |
| JP7287498B2 (ja) | 運転制御方法及び運転制御装置 | |
| WO2020230301A1 (ja) | 車両の走行制御方法及び走行制御装置 | |
| RU2798793C2 (ru) | Способ и устройство помощи при вождении | |
| RU2792474C1 (ru) | Способ управления вождением и устройство управления вождением | |
| WO2023002543A1 (ja) | 車両の運転モード切り替え制御方法及び運転モード切り替え制御装置 | |
| WO2022107277A1 (ja) | 車両の走行制御方法及び走行制御装置 | |
| WO2021106146A1 (ja) | 車両の走行制御方法および走行制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19928311 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021519218 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2019928311 Country of ref document: EP Effective date: 20211215 |