WO2020184516A1 - 光走査装置、光走査方法、及びリチウムイオン電池の製造方法 - Google Patents
光走査装置、光走査方法、及びリチウムイオン電池の製造方法 Download PDFInfo
- Publication number
- WO2020184516A1 WO2020184516A1 PCT/JP2020/010036 JP2020010036W WO2020184516A1 WO 2020184516 A1 WO2020184516 A1 WO 2020184516A1 JP 2020010036 W JP2020010036 W JP 2020010036W WO 2020184516 A1 WO2020184516 A1 WO 2020184516A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- optical scanning
- rotating
- mirror
- reflecting surface
- optical
- Prior art date
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/08—Devices involving relative movement between laser beam and workpiece
- B23K26/082—Scanning systems, i.e. devices involving movement of the laser beam relative to the laser head
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
Landscapes
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Plasma & Fusion (AREA)
- Mechanical Engineering (AREA)
- Laser Beam Processing (AREA)
Abstract
回転シャフトを備える第一回転機と、前記回転シャフトの先端に取り付けられた回転ミラーと、を備える光走査装置を提供する。前記回転ミラーの反射面の法線は、前記反射面に入射する入射光の光軸に対して第1角度で傾いており、前記回転シャフトの回転軸は、前記反射面の法線に対して第2角度で傾いており、前記第1角度は、前記第2角度よりも大きい。
Description
本発明は、光走査装置、光走査方法、及びリチウムイオン電池の製造方法に関するものである。
本願は、2019年3月8日に、日本に出願された特願2019-042639号に基づき優先権を主張し、その内容をここに援用する。
本願は、2019年3月8日に、日本に出願された特願2019-042639号に基づき優先権を主張し、その内容をここに援用する。
下記特許文献1には、複数の金属製のワーク同士を重ね合わせた状態又は突き合わせた状態でこれらを接合するレーザー溶接装置が開示されている。このレーザー溶接装置は、二枚の駆動ミラーでレーザー光を反射し、ワークにレーザー光を照射している。このような二枚の駆動ミラーを使った装置は、ガルバノスキャナとも称される。二枚の駆動ミラーそれぞれをモータで適切な角度に回転させることで、レーザー光を狙った位置に照射することができる。たとえば、レーザー光を予め設定された軌跡(たとえば円状又は螺旋状)に沿って走査することも可能である。
レーザー溶接において、ウォブリングと称される円運動と直線運動を組み合わせたような軌跡(螺旋運動のような軌跡)で、溶接対象であるワーク同士の界面に対し、ある程度の幅を持った溶接を行う場合がある。このような場合、スパッタと呼ばれる飛散物を抑制したり、溶接部位の強度を高めるために、極短時間で高い熱量を局所的に与える必要がある。上記軌跡に沿って高速で描画(走査)することが望ましい。
上記ガルバノスキャナ方式では、レーザー光を円運動させるために二枚の駆動ミラーを高速で細かく回転(振動)させる。この方式においてレーザー光の照射範囲をできるだけ大きくとるためには、二枚の駆動ミラーのいずれか一方の面積を大きくしなければならない。この場合、二枚の駆動ミラーの少なくとも一方の重量が重くなり、上記のような微細な高速振動を正確に行うことが極めて困難である。
本発明は、上記問題点に鑑みてなされたものであり、円運動を含む軌跡の高速走査が可能な光走査装置、光走査方法、及びリチウムイオン電池の製造方法の提供を目的とする。
(1)本発明の一態様に係る光走査装置は、回転シャフトを備える第一回転機と、前記回転シャフトの先端に取り付けられた回転ミラーと、を備え、前記回転ミラーの反射面の法線は、前記反射面に入射する入射光の光軸に対して第1角度で傾いており、前記回転シャフトの回転軸は、前記反射面の法線に対して第2角度で傾いており、前記第1角度は、前記第2角度よりも大きい。
(2)上記(1)に記載された光走査装置であって、前記入射光の光軸と前記回転シャフトの回転軸が一致していなくてもよい。
(3)上記(1)又は(2)に記載された光走査装置であって、前記回転ミラーの反射面における前記入射光の入射位置Pは、前記回転シャフトの回転軸が通る中心位置と一致していてもよい。
(4)上記(1)又は(2)に記載された光走査装置であって、前記回転ミラーの反射面における前記入射光の入射位置Pは、前記回転シャフトの回転軸が通る中心位置からずれていてもよい。
(5)上記(1)~(3)に記載された光走査装置であって、前記回転軸に垂直な平面に沿って前記第一回転機を移動させる第一移動ステージと、前記第一移動ステージの移動を制御する第一制御装置と、をさらに備え、前記第一制御装置は、前記回転ミラーの反射面における前記入射光の入射位置Pが、前記回転シャフトの回転軸が通る中心位置と、前記中心位置からずれた位置との間で移動するように、前記第一移動ステージの移動を制御してもよい。
(6)上記(1)~(3)に記載された光走査装置であって、前記入射光の光軸上に配置される透過板と、前記透過板を回転させて前記光軸を平行移動させる第二回転機と、を備える透過板回転装置と、前記第二回転機の回転を制御する回転制御装置と、をさらに備え、前記回転制御装置は、前記回転ミラーの反射面における前記入射光の入射位置Pが、前記回転シャフトの回転軸が通る中心位置と、前記中心位置からずれた位置との間で移動するように、前記第二回転機の回転を制御してもよい。
(7)上記(1)~(3)に記載された光走査装置であって、前記入射光を発する光源と、前記回転軸に垂直な平面に沿って前記光源を移動させる第二移動ステージと、前記第二移動ステージの移動を制御する第二制御装置と、をさらに備え、前記第二制御装置は、前記回転ミラーの反射面における前記入射光の入射位置Pが、前記回転シャフトの回転軸が通る中心位置と、前記中心位置からずれた位置との間で移動するように、前記第二移動ステージの移動を制御してもよい。
(8)上記(1)~(7)に記載された光走査装置であって、前記回転ミラーの反射面で反射した光を反射する光路調整ミラーと、前記回転軸に対して平行に前記光路調整ミラーを移動させる第三移動ステージと、前記第三移動ステージの移動を制御する第三制御装置と、をさらに備えていてもよい。
(9)上記(1)~(7)に記載された光走査装置であって、前記回転ミラーの反射面で反射した光を反射する光路調整ミラーと、前記回転軸に対して平行に前記第一回転機及び前記光路調整ミラーを一体として移動させる第四移動ステージと、前記第四移動ステージの移動を制御する第四制御装置と、をさらに備えていてもよい。
(10)上記(1)~(9)に記載された光走査装置であって、前記回転ミラーの前記反射面と反対側の回転シャフト取付け面は、前記回転シャフトの回転軸に対して直交した平坦面であってもよい。
(11)上記(1)~(9)に記載された光走査装置であって、前記回転ミラーの前記反射面と反対側の回転シャフト取付け面は、前記反射面と平行且つ前記回転シャフトの回転軸に対して傾いた傾斜面であってもよい。
(12)本発明の一態様に係る光走査方法は、上記(1)~(11)のいずれかの光走査装置を用いて第一ワーク及び第二ワークの界面に沿ってレーザー光を走査する際に、前記回転ミラーの反射面における前記入射光の入射位置Pを移動させる。
(13)本発明の一態様に係る光走査方法は、上記(8)又は(9)光走査装置を用いて第一ワーク及び第二ワークの界面に沿ってレーザー光を走査する光走査方法であって、前記回転軸に対して平行に前記光路調整ミラーを移動することにより、前記界面における光の走査幅を変える。
(14)上記(12)~(13)に記載された光走査方法であって、前記第一ワーク及び前記第二ワークの少なくとも一方がアルミであってもよい。
(15)本発明の一態様に係るリチウムイオン電池の製造方法は、缶パッケージの注液口に金属蓋を重ね、上記(1)~(11)の光走査装置を用いて、前記注液口と前記金属蓋との界面に沿ってレーザー光を走査する。
(16)上記(15)に記載されたリチウムイオン電池の製造方法であって、前記金属蓋を前記電解液が注入された缶パッケージの注液口に重ねる前に、前記光走査装置を用いて前記注液口周縁に沿ってレーザー光を走査してもよい。
(17)上記(15)又は(16)に記載されたリチウムイオン電池の製造方法であって、開口を有する金属缶に、前記開口を閉塞するように前記注液口を有するキャップ体を重ね、前記光走査装置を用いて、前記金属缶と前記キャップ体との界面に沿ってレーザー光を走査して前記缶パッケージを得てもよい。
(18)上記(15)~(17)に記載されたリチウムイオン電池の製造方法であって、前記金属缶、前記キャップ体、及び前記金属蓋の材質は、アルミ、ステンレス、鉄のいずれかであってもよい。
(3)上記(1)又は(2)に記載された光走査装置であって、前記回転ミラーの反射面における前記入射光の入射位置Pは、前記回転シャフトの回転軸が通る中心位置と一致していてもよい。
(4)上記(1)又は(2)に記載された光走査装置であって、前記回転ミラーの反射面における前記入射光の入射位置Pは、前記回転シャフトの回転軸が通る中心位置からずれていてもよい。
(5)上記(1)~(3)に記載された光走査装置であって、前記回転軸に垂直な平面に沿って前記第一回転機を移動させる第一移動ステージと、前記第一移動ステージの移動を制御する第一制御装置と、をさらに備え、前記第一制御装置は、前記回転ミラーの反射面における前記入射光の入射位置Pが、前記回転シャフトの回転軸が通る中心位置と、前記中心位置からずれた位置との間で移動するように、前記第一移動ステージの移動を制御してもよい。
(6)上記(1)~(3)に記載された光走査装置であって、前記入射光の光軸上に配置される透過板と、前記透過板を回転させて前記光軸を平行移動させる第二回転機と、を備える透過板回転装置と、前記第二回転機の回転を制御する回転制御装置と、をさらに備え、前記回転制御装置は、前記回転ミラーの反射面における前記入射光の入射位置Pが、前記回転シャフトの回転軸が通る中心位置と、前記中心位置からずれた位置との間で移動するように、前記第二回転機の回転を制御してもよい。
(7)上記(1)~(3)に記載された光走査装置であって、前記入射光を発する光源と、前記回転軸に垂直な平面に沿って前記光源を移動させる第二移動ステージと、前記第二移動ステージの移動を制御する第二制御装置と、をさらに備え、前記第二制御装置は、前記回転ミラーの反射面における前記入射光の入射位置Pが、前記回転シャフトの回転軸が通る中心位置と、前記中心位置からずれた位置との間で移動するように、前記第二移動ステージの移動を制御してもよい。
(8)上記(1)~(7)に記載された光走査装置であって、前記回転ミラーの反射面で反射した光を反射する光路調整ミラーと、前記回転軸に対して平行に前記光路調整ミラーを移動させる第三移動ステージと、前記第三移動ステージの移動を制御する第三制御装置と、をさらに備えていてもよい。
(9)上記(1)~(7)に記載された光走査装置であって、前記回転ミラーの反射面で反射した光を反射する光路調整ミラーと、前記回転軸に対して平行に前記第一回転機及び前記光路調整ミラーを一体として移動させる第四移動ステージと、前記第四移動ステージの移動を制御する第四制御装置と、をさらに備えていてもよい。
(10)上記(1)~(9)に記載された光走査装置であって、前記回転ミラーの前記反射面と反対側の回転シャフト取付け面は、前記回転シャフトの回転軸に対して直交した平坦面であってもよい。
(11)上記(1)~(9)に記載された光走査装置であって、前記回転ミラーの前記反射面と反対側の回転シャフト取付け面は、前記反射面と平行且つ前記回転シャフトの回転軸に対して傾いた傾斜面であってもよい。
(12)本発明の一態様に係る光走査方法は、上記(1)~(11)のいずれかの光走査装置を用いて第一ワーク及び第二ワークの界面に沿ってレーザー光を走査する際に、前記回転ミラーの反射面における前記入射光の入射位置Pを移動させる。
(13)本発明の一態様に係る光走査方法は、上記(8)又は(9)光走査装置を用いて第一ワーク及び第二ワークの界面に沿ってレーザー光を走査する光走査方法であって、前記回転軸に対して平行に前記光路調整ミラーを移動することにより、前記界面における光の走査幅を変える。
(14)上記(12)~(13)に記載された光走査方法であって、前記第一ワーク及び前記第二ワークの少なくとも一方がアルミであってもよい。
(15)本発明の一態様に係るリチウムイオン電池の製造方法は、缶パッケージの注液口に金属蓋を重ね、上記(1)~(11)の光走査装置を用いて、前記注液口と前記金属蓋との界面に沿ってレーザー光を走査する。
(16)上記(15)に記載されたリチウムイオン電池の製造方法であって、前記金属蓋を前記電解液が注入された缶パッケージの注液口に重ねる前に、前記光走査装置を用いて前記注液口周縁に沿ってレーザー光を走査してもよい。
(17)上記(15)又は(16)に記載されたリチウムイオン電池の製造方法であって、開口を有する金属缶に、前記開口を閉塞するように前記注液口を有するキャップ体を重ね、前記光走査装置を用いて、前記金属缶と前記キャップ体との界面に沿ってレーザー光を走査して前記缶パッケージを得てもよい。
(18)上記(15)~(17)に記載されたリチウムイオン電池の製造方法であって、前記金属缶、前記キャップ体、及び前記金属蓋の材質は、アルミ、ステンレス、鉄のいずれかであってもよい。
上記本発明のいくつかの態様によれば、円運動を含む軌跡の高速走査が可能な光走査装置、光走査方法、及びリチウムイオン電池の製造方法を提供できる。
以下、本発明の実施形態について図面を参照して説明する。なお、以下の説明では、実施形態に係る光走査装置をレーザー溶接装置に適用した例を示す。
(第1実施形態)
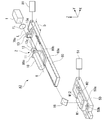
図1Aは、第1実施形態に係る光走査装置2を備えるレーザー溶接装置Aの構成図である。図2は、光走査装置2によるレーザー光Lの軌跡を示す平面図である。
本実施形態のレーザー溶接装置Aは、図1Aに例示すように、金属製の2つのワークW1,W2を突き合わせた状態でこれらをレーザー溶接する。溶接装置Aは、レーザー光Lを照射するレーザー光照射装置1(発振機等)(光源)と、ワークW1,W2の界面W12に沿ってレーザー光Lを走査する光走査装置2と、を備えている。また、図1Aにおいて不図示であるが、レーザー溶接装置Aは、レーザー光Lの集光レンズとして、レンズ周辺部と中心部で走査速度が一定になるように設計されたfθレンズを備えていてもよい。
図1Aは、第1実施形態に係る光走査装置2を備えるレーザー溶接装置Aの構成図である。図2は、光走査装置2によるレーザー光Lの軌跡を示す平面図である。
本実施形態のレーザー溶接装置Aは、図1Aに例示すように、金属製の2つのワークW1,W2を突き合わせた状態でこれらをレーザー溶接する。溶接装置Aは、レーザー光Lを照射するレーザー光照射装置1(発振機等)(光源)と、ワークW1,W2の界面W12に沿ってレーザー光Lを走査する光走査装置2と、を備えている。また、図1Aにおいて不図示であるが、レーザー溶接装置Aは、レーザー光Lの集光レンズとして、レンズ周辺部と中心部で走査速度が一定になるように設計されたfθレンズを備えていてもよい。
本実施形態のレーザー溶接装置Aでは、図2に例示すように、界面W12に沿ってレーザー光Lをウォブリングさせる。つまり、レーザー光Lは、円運動と直線運動を組み合わせた軌跡で描画(走査)される。図1Aに例示す光走査装置2は、上記円運動を担う回転機10(第一回転機)及び回転ミラー12と、上記直線運動を担う2枚のガルバノミラー14,15と、を有している。レーザー光Lの照射面において、ガルバノミラー14,15のうちの一方がX軸方向の走査を担い、他方がY軸方向の走査を担う。
回転機10は、回転軸R周りに回転する回転シャフト11を備えている。この回転機10は、回転シャフト11を高速回転させることが可能なスピンドルモーターあるいはエアタービンなどであるとよい。回転機10は、たとえば、100000[rpm]以上の高速回転が可能であるとよい。
いくつかの図に示されているX,Y,Z軸は説明の便宜のために付されている。Y軸は回転軸Rに平行な方向を示し、X軸及びZ軸は互いに垂直であって且つY軸に垂直な方向を示している。典型的には、XY平面が水平面に対応し、Z軸が鉛直方向に対応する。
いくつかの図に示されているX,Y,Z軸は説明の便宜のために付されている。Y軸は回転軸Rに平行な方向を示し、X軸及びZ軸は互いに垂直であって且つY軸に垂直な方向を示している。典型的には、XY平面が水平面に対応し、Z軸が鉛直方向に対応する。
回転ミラー12は、回転シャフト11の先端に取り付けられている。回転ミラー12は、小型の円形ミラーであるとよい。回転ミラー12の反射面12aの法線は、回転シャフト11の回転軸Rに対して傾いている(詳しくは後述)。回転している回転ミラー12の反射面12aに入射したレーザー光Lは、ある角度を持って反射され、円状の軌跡を描画する。つまり、回転ミラー12の反射面12aで反射したレーザー光Lは、円運動する。
ガルバノミラー14,15は、この円運動するレーザー光Lを、ワークW1,W2上に設定したX-Y平面において移動させる。つまり、ガルバノミラー14,15は、円運動するレーザー光Lを、界面W12に沿って平面上に直線運動させる役割を担う。仮に、ガルバノミラー14,15のみで、レーザー光Lの円運動を行う場合、ガルバノミラー14,15を高速で細かく回転(振動)させる必要があるが、その振動は1000[Hz]程度が限界である。
回転ミラー12で反射したレーザー光Lは、一度、光路調整ミラー13の反射面13aで反射した後、ガルバノミラー14に入射する。光路調整ミラー13の反射面13aと回転ミラー12の反射面12aとの間の距離Dが可変である構成を採用してもよい。回転ミラー12の反射面12aの法線と、回転シャフト11の回転軸Rとの間の角度をθ[rad]、反射面12aからワークW1,W2までの光路長をS[mm]とすると、ワークW1,W2の対象面に、半径θ×S[mm]の円を描画することができる。距離Dを調整することにより、Sを調整し、描画する円の半径を変えることができる。
図1Bは、図1Aに示すレーザー溶接装置Aの変形例である。図1Bに例示するように、レーザー溶接装置Aにおいて、光路調整ミラー13及び光走査装置2(回転機10,回転シャフト11,回転ミラー12)の位置を相互に入れ替えてもよい。この場合、光走査装置2をレーザー光照射装置1により近づけるように配置できるため、光走査装置2の剛性をより確保しやすくできる。その結果、上述した効果に加えて、回転ミラー12の反射面12aで反射された光の光軸より安定させることができるという効果も得られる。
図1Bは、図1Aに示すレーザー溶接装置Aの変形例である。図1Bに例示するように、レーザー溶接装置Aにおいて、光路調整ミラー13及び光走査装置2(回転機10,回転シャフト11,回転ミラー12)の位置を相互に入れ替えてもよい。この場合、光走査装置2をレーザー光照射装置1により近づけるように配置できるため、光走査装置2の剛性をより確保しやすくできる。その結果、上述した効果に加えて、回転ミラー12の反射面12aで反射された光の光軸より安定させることができるという効果も得られる。
この円の軌跡は、本来は完全な円であることが望ましい。しかしながら、レーザー光照射装置1から照射されたレーザー光Lを同じ方向に反射することはできないため、微小ではあるが、レーザー光Lの光軸に対して反射面12aの法線を、傾ける必要がある。このため、レーザー光Lの軌跡は、微妙に楕円状となる。レーザー溶接の場合、この程度の楕円であっても溶接性能には影響しないため、無視してよい程度の形状の崩れと言える。
このように、上述した本実施形態によれば、回転機10の回転シャフト11の先端に取り付けた回転ミラー12によって、レーザー光Lの円を高速に描画できるため、ガルバノミラー14,15との組み合わせることで、図2に例示すようなウォブリング軌跡を高速で描画でき、ワークW1,W2を短時間で良好にレーザー溶接することができる。
なお、本実施形態では、ガルバノミラー14,15がウォブリングの直線運動を担っているが、ガルバノミラー14,15の代わりに、たとえば、ワークW1,W2を平面移動させる移動装置を採用してもよい。
なお、本実施形態では、ガルバノミラー14,15がウォブリングの直線運動を担っているが、ガルバノミラー14,15の代わりに、たとえば、ワークW1,W2を平面移動させる移動装置を採用してもよい。
図1Cは、光路調整ミラー13の反射面13aと回転ミラー12の反射面12aとの間の距離D、及び反射面12aからワークW1,W2までの光路長Sが可変である構成を採用したレーザー溶接装置の一例A2を示す構成図である。
図1Cに例示すレーザー溶接装置A2は、上述した溶接装置Aとは異なり、ワークW1,W2がワーク移動装置50の上に配置されている。また、レーザー溶接装置A2は、光路調整ミラー13の反射面13aで反射したレーザー光LがワークW1,W2の界面W12に沿って走査されるように、レーザー光Lの光路を折り返す折返しミラー16を備えている。
図1Cに例示すレーザー溶接装置A2は、上述した溶接装置Aとは異なり、ワークW1,W2がワーク移動装置50の上に配置されている。また、レーザー溶接装置A2は、光路調整ミラー13の反射面13aで反射したレーザー光LがワークW1,W2の界面W12に沿って走査されるように、レーザー光Lの光路を折り返す折返しミラー16を備えている。
ワーク移動装置50は、ワークW1,W2が載置される可動テーブル50aと、可動テーブル50aを貫通しY軸方向に延びるシャフト50bと、を備える。可動テーブル50aは、制御装置51により、シャフト50bに沿って移動可能である。
レーザー光Lを照射中にワーク移動装置50(可動テーブル50a)を移動させることにより、ワークW1,W2の界面W12において、レーザー光LをY方向に沿って走査することができる。
レーザー光Lを照射中にワーク移動装置50(可動テーブル50a)を移動させることにより、ワークW1,W2の界面W12において、レーザー光LをY方向に沿って走査することができる。
図1Cのレーザー溶接装置A2において、光走査装置2は、回転ミラー12の反射面12aで反射した光を反射する光路調整ミラー13と、回転軸Rに対して平行に(Y軸方向に沿って)光路調整ミラー13を移動させる移動ステージ70(第三移動ステージ)と、移動ステージ70の移動を制御する制御装置71(第三制御装置)と、をさらに備えている。
移動ステージ70は、ベース70aと、ベース70aに対して水平移動可能な可動テーブル70bと、可動テーブル70bに固定され光路調整ミラー13を保持するミラーホルダー70cと、を備える。可動テーブル70bは、制御装置71により、ベース70a上で回転軸Rに対して平行に(Y軸方向に沿って)移動可能である。
移動ステージ70は、ベース70aと、ベース70aに対して水平移動可能な可動テーブル70bと、可動テーブル70bに固定され光路調整ミラー13を保持するミラーホルダー70cと、を備える。可動テーブル70bは、制御装置71により、ベース70a上で回転軸Rに対して平行に(Y軸方向に沿って)移動可能である。
光路調整ミラー13の反射面13aと回転ミラー12の反射面12aとの間の距離Dを移動ステージ70の移動により調整し、光路長Sを調整することによって、ワーク界面W12に描画される円の半径を変えることができる。これと同時に、制御装置51によりワーク移動装置50の位置を制御することによって、ワーク界面W12におけるY軸方向の走査もできる。
よって、ワーク界面W12に図2に例示するようなウォブリング溶接を高速に施すことができる。また、レーザー光Lの照射中に光路長Sを調整することで、ワーク界面W12における走査幅(溶接幅)を変えることもできる。
また、図1Cの光走査装置2によれば、回転機10(回転ミラー12)の位置を固定したまま距離Dを調整できるため、回転シャフト11の回転軸Rの方向をより維持しやすい。
よって、ワーク界面W12に図2に例示するようなウォブリング溶接を高速に施すことができる。また、レーザー光Lの照射中に光路長Sを調整することで、ワーク界面W12における走査幅(溶接幅)を変えることもできる。
また、図1Cの光走査装置2によれば、回転機10(回転ミラー12)の位置を固定したまま距離Dを調整できるため、回転シャフト11の回転軸Rの方向をより維持しやすい。
現実問題として、回転シャフト11に対して精度よく回転ミラー12を取り付けることが難しい。上述した光走査装置2によれば、光路長Sの調整によりワーク界面W12に描画される円の半径を変えることができるため、回転シャフト11に対する回転ミラー12の取付け精度が充分でない場合にも、ワーク界面W12におけるレーザー光Lの照射位置を適宜に調整することができる。結果的に、回転シャフト11に対して回転ミラー12を取り付ける工程を容易にできる。
さらに、光路長Sの調整により、ワークの材質や溶接形態に合わせた最適な溶接幅(スポット径やウォブル幅)や溶け込み深さを得ることができる。
なお、回転機10、ワーク移動装置50、及び、移動ステージ70を一つの制御装置で制御してもよい。この場合、ウォブリングの円運動及び並進運動の速度、並びに幅を総合的に一つの制御装置で調整できるため、ウォブリングのより細かい制御が可能になる。
さらに、光路長Sの調整により、ワークの材質や溶接形態に合わせた最適な溶接幅(スポット径やウォブル幅)や溶け込み深さを得ることができる。
なお、回転機10、ワーク移動装置50、及び、移動ステージ70を一つの制御装置で制御してもよい。この場合、ウォブリングの円運動及び並進運動の速度、並びに幅を総合的に一つの制御装置で調整できるため、ウォブリングのより細かい制御が可能になる。
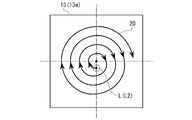
レーザー溶接装置A2により、渦巻き状の軌跡を描画することも可能である。図7は、光路調整ミラー13の反射面13aにおけるレーザー光L(反射光L2)の渦巻き状の軌跡を示している。レーザー溶接装置A2を使って、レーザー光Lの照射中に、ワークW1,W2の位置を固定したまま回転ミラー12の反射面12aと光路調整ミラー13の反射面13aとの間の距離Dを徐々に離間させることにより、図7に例示したような渦巻き状の軌跡を描画できる。
図1Dは、反射面12aからワークW1,W2までの光路長Sが可変である構成を採用したレーザー溶接装置の一例A3を示す構成図である。
図1D示すレーザー溶接装置A3は、上述した溶接装置A2とは異なり、反射面12aと反射面13aとの間の相対的位置関係が固定されており、距離Dは不変である。折返しミラー16及びワーク移動装置50の構成は、溶接装置A2のものと同様であるため、説明を省略する。
図1D示すレーザー溶接装置A3は、上述した溶接装置A2とは異なり、反射面12aと反射面13aとの間の相対的位置関係が固定されており、距離Dは不変である。折返しミラー16及びワーク移動装置50の構成は、溶接装置A2のものと同様であるため、説明を省略する。
図1Dのレーザー溶接装置A3において、光走査装置2は、回転ミラー12の反射面12aで反射した光を反射する光路調整ミラー13と、回転軸Rに対して平行に(Y軸方向に沿って)第一回転機10及び光路調整ミラー13を一体として移動させる移動ステージ80(第四移動ステージ)と、移動ステージ80の移動を制御する制御装置81(第四制御装置)と、をさらに備えている。
移動ステージ80は、ベース80aと、ベース80aに対して水平移動可能な可動テーブル80bと、可動テーブル80bに固定され光路調整ミラー13を保持するミラーホルダー70cと、可動テーブル80bに固定され回転機10を保持するブラケット80cと、を備える。
可動テーブル80b上において、回転機10と光路調整ミラー13との間(反射面12aと反射面13aとの間)の相対的位置関係は固定されている。可動テーブル80bは、制御装置81により、ベース80a上で回転軸Rに対して平行に(Y軸方向に沿って)移動可能である。
移動ステージ80は、ベース80aと、ベース80aに対して水平移動可能な可動テーブル80bと、可動テーブル80bに固定され光路調整ミラー13を保持するミラーホルダー70cと、可動テーブル80bに固定され回転機10を保持するブラケット80cと、を備える。
可動テーブル80b上において、回転機10と光路調整ミラー13との間(反射面12aと反射面13aとの間)の相対的位置関係は固定されている。可動テーブル80bは、制御装置81により、ベース80a上で回転軸Rに対して平行に(Y軸方向に沿って)移動可能である。
反射面12aからワークW1,W2までの光路長S(より直接的には、反射面13aからワークW1,W2までの光路長)を移動ステージ80の移動により調整することによって、ワーク界面W12に描画される円の半径を変えることができる。これと同時に、制御装置51によりワーク移動装置50の位置を制御することによって、ワーク界面W12におけるY軸方向の走査もできる。
よって、ワーク界面W12に図2に例示するようなウォブリング溶接を高速に施すことができる。また、レーザー光Lの照射中に光路長Sを調整することで、ワーク界面W12における走査幅(溶接幅)を変えることもできる。
よって、ワーク界面W12に図2に例示するようなウォブリング溶接を高速に施すことができる。また、レーザー光Lの照射中に光路長Sを調整することで、ワーク界面W12における走査幅(溶接幅)を変えることもできる。
また、上述したレーザー溶接装置A2の光走査装置2と同様に、光路長Sの調整によりワーク界面W12に描画される円の半径を変えることができるため、回転シャフト11に対する回転ミラー12の取付け精度が充分でない場合にも、ワーク界面W12におけるレーザー光Lの照射位置を適宜に調整することができる。結果的に、回転シャフト11に対して回転ミラー12を取り付ける工程を簡素化できる。
さらに、光路長Sの調整により、ワークの材質や溶接形態に合わせた最適な溶接幅(スポット径やウォブル幅)や溶け込み深さを得ることができる。
なお、回転機10、ワーク移動装置50、及び、移動ステージ80を一つの制御装置で制御してもよい。この場合、ウォブリングの円運動及び並進運動の速度、並びに幅を総合的に一つの制御装置で調整できるため、ウォブリングのより細かい制御が可能になる。
さらに、光路長Sの調整により、ワークの材質や溶接形態に合わせた最適な溶接幅(スポット径やウォブル幅)や溶け込み深さを得ることができる。
なお、回転機10、ワーク移動装置50、及び、移動ステージ80を一つの制御装置で制御してもよい。この場合、ウォブリングの円運動及び並進運動の速度、並びに幅を総合的に一つの制御装置で調整できるため、ウォブリングのより細かい制御が可能になる。
上述したレーザー溶接装置A2と同様に、レーザー溶接装置A3により、渦巻き状の軌跡を描画することも可能である。レーザー溶接装置A3を使って、レーザー光Lの照射中に、ワークW1,W2の位置を固定したまま回転ミラー12の反射面12aと折返しミラー16との間の距離を徐々に離間させることにより、図7に例示したような渦巻き状の軌跡を描画できる。
上述した構成によれば、移動ステージ80の可動テーブル80bによって回転機10と光路調整ミラー13との間の相対的位置関係が固定されているため、外乱(振動等)に強い光走査装置及び溶接装置を提供できる。
また、移動ステージ80の移動により光路長Sを調整している最中も回転ミラー12の反射面12aと光路調整ミラー13の反射面13aとの距離Dが不変であるため、反射面13aにおけるレーザー光Lの軌跡の大きさは一定である。よって、光路調整ミラー13の大きさを必要最小限に抑えることができ、光走査装置2を軽量化できる。
また、移動ステージ80の移動により光路長Sを調整している最中も回転ミラー12の反射面12aと光路調整ミラー13の反射面13aとの距離Dが不変であるため、反射面13aにおけるレーザー光Lの軌跡の大きさは一定である。よって、光路調整ミラー13の大きさを必要最小限に抑えることができ、光走査装置2を軽量化できる。
レーザー溶接装置A3は、図1Dに例示されるように、レーザー光照射装置1と回転ミラー12との間に集光レンズFLを備えていてもよい。レーザー溶接装置A3の構成では、移動ステージ80の移動により光路長Sを調整している最中もレーザー光照射装置1からワークW1,W2までの光路長が不変であるため、界面W12に集光レンズFLの焦点を合わせた状態を保つことができる。すなわち、光路長Sの調整動作にかかわらず、界面W12に安定してエネルギー密度の高いレーザー光を照射することができる。
図3は、第1実施形態に係る回転機10、回転ミラー12、及びレーザー光Lの位置関係を示す図である。
図3に例示すように、回転ミラー12の反射面12aの法線Nは、反射面12aに入射する入射光L1の光軸に対して第1角度θ1で傾いている。また、回転シャフト11の回転軸Rは、反射面12aの法線Nに対して第2角度θ2で傾いている。
図3に例示すように、回転ミラー12の反射面12aの法線Nは、反射面12aに入射する入射光L1の光軸に対して第1角度θ1で傾いている。また、回転シャフト11の回転軸Rは、反射面12aの法線Nに対して第2角度θ2で傾いている。
第1角度θ1と第2角度θ2は、大きさ(絶対値)が異なっている。図3に示す例では、第1角度θ1の方が、第2角度θ2よりも大きい。また、図3に示す例では、入射光L1の光軸が、回転シャフト11の回転軸Rに対して傾いている。つまり、入射光L1の光軸と回転シャフト11の回転軸Rは、一致していない。また、図3に示す例では、回転ミラー12の反射面12aにおける入射光L1の入射位置Pは、回転シャフト11の回転軸Rが通る中心位置Cと一致している。
入射位置Pを通る反射面12aの法線Nに対して、入射光L1の入射角度(第1角度θ1)と反射光L2の反射角度は、同じである。反射面12aが回転軸R周りに回転しているとき、反射面12aの法線Nは回転シャフト11の回転軸Rに対し第2角度θ2の傾斜を持って回転する。この結果、反射光L2は、入射位置Pにおいて、第2角度θ2の4倍の角度を頂角とする円錐状の反射領域20を形成する。つまり、この反射領域20(円錐)の底面の軌跡が、上述した円の軌跡となる。なお、図4は、光路調整ミラー13の反射面13aにおけるレーザー光L(反射光L2)の円の軌跡を示している。
上述した本実施形態に係る光走査装置2は、回転シャフト11を備える回転機10と、回転シャフト11の先端に取り付けられた回転ミラー12と、を有し、回転ミラー12の反射面12aの法線Nは、反射面12aに入射する入射光L1の光軸に対して第1角度θ1で傾いており、回転シャフト11の回転軸Rは、反射面12aの法線Nに対して第2角度θ2で傾いているため、回転機10を用いた円軌跡の高速描画(走査)を可能としている。
図3に例示すように、第1角度θ1と第2角度θ2とは異なっていてもよい。図5は、第1角度θ1と第2角度θ2が等しい場合の反射光L2の反射領域20を示している。図5に示す例では、第1角度θ1と第2角度θ2とが等しく、且つ、入射光L1の光軸と回転シャフト11の回転軸Rが一致している。この場合、入射光L1の光軸回りに反射光L2の反射領域20が形成されるため、図1A~1Cに例示する光路調整ミラー13などを入射光L1の周囲(つまり、レーザー光照射装置1の周囲)に環状に配置するなどの工夫が必要になる。すなわち、回転ミラー12よりも下流側の光学素子について、より複雑な構造が必要になる。
上記複雑化を避けるために、図3に例示すように、入射光L1(つまりレーザー光照射装置1)が反射光L2の反射領域20に重ならないように第1角度θ1と第2角度θ2とを設定するとよい。
なお、入射光L1の光軸に対して回転シャフト11の回転軸Rを平行移動した場合(偏心)した場合も、第1角度θ1と第2角度θ2が等しい限り、入射光L1の光軸回りに、反射光L2の反射領域20が形成される。上記複雑化を避けるために、入射光L1の光軸と回転シャフト11の回転軸Rの一致、不一致にかかわらず、第1角度θ1と第2角度θ2とが異なっているとよい。
なお、入射光L1の光軸に対して回転シャフト11の回転軸Rを平行移動した場合(偏心)した場合も、第1角度θ1と第2角度θ2が等しい限り、入射光L1の光軸回りに、反射光L2の反射領域20が形成される。上記複雑化を避けるために、入射光L1の光軸と回転シャフト11の回転軸Rの一致、不一致にかかわらず、第1角度θ1と第2角度θ2とが異なっているとよい。
図3に例示すように、回転ミラー12の反射面12aにおける入射光L1の入射位置Pは、回転シャフト11の回転軸Rが通る中心位置Cに一致していてもよい。
図3に例示すように、回転ミラー12の反射面12aと反対側の回転シャフト取付け面12bは、回転シャフト11の回転軸Rに対して直交した平坦面であってもよい。この構成によれば、回転シャフト11の先端に対して回転ミラー12が取り付けやすくなり、光走査装置2の組み立て性が向上する。
また、上述した各光走査装置2は、回転ミラー12の反射面12aにおける入射光L1の入射位置Pを移動させるように構成されていてもよい。各光走査装置2を用いて第一ワークW1及び第二ワークW2の界面W12に沿ってレーザー光Lを走査する際に、回転ミラー12の反射面12aにおける入射光L1の入射位置Pを移動させることにより、入射光L1が反射面12a上の特定の点に長時間連続して照射されることを回避できる。
また、上述した各光走査装置2は、回転ミラー12の反射面12aにおける入射光L1の入射位置Pを移動させるように構成されていてもよい。各光走査装置2を用いて第一ワークW1及び第二ワークW2の界面W12に沿ってレーザー光Lを走査する際に、回転ミラー12の反射面12aにおける入射光L1の入射位置Pを移動させることにより、入射光L1が反射面12a上の特定の点に長時間連続して照射されることを回避できる。
(第2実施形態)
次に、本発明の第2実施形態について説明する。以下の説明において、上述の実施形態と同一又は同等の構成については同一の符号を付し、その説明を簡略若しくは省略する。
次に、本発明の第2実施形態について説明する。以下の説明において、上述の実施形態と同一又は同等の構成については同一の符号を付し、その説明を簡略若しくは省略する。
図6Aは、第2実施形態に係る光走査装置2の構成図である。
図6Aに例示する光走査装置2は、回転機10が移動装置30に搭載されている点で、上記第一実施形態と異なる。回転軸Rに垂直な平面における移動装置30の移動により、回転ミラー12の反射面12aにおいて、入射光L1の入射位置Pと回転シャフト11の回転軸Rが通る中心位置Cとの間の距離が可変である。
なお、図6Aにおいて、説明の便宜上、移動後の回転ミラー12(二点鎖線)の厚みは移動前の回転ミラー12(実線)の厚みよりも薄く表示されている。
図6Aに例示する光走査装置2は、回転機10が移動装置30に搭載されている点で、上記第一実施形態と異なる。回転軸Rに垂直な平面における移動装置30の移動により、回転ミラー12の反射面12aにおいて、入射光L1の入射位置Pと回転シャフト11の回転軸Rが通る中心位置Cとの間の距離が可変である。
なお、図6Aにおいて、説明の便宜上、移動後の回転ミラー12(二点鎖線)の厚みは移動前の回転ミラー12(実線)の厚みよりも薄く表示されている。
移動装置30は、たとえば、一方向(直線、曲線は問わない)に移動可能なガイド装置、又は、二方向以上に移動が可能な移動装置などを例示することができる。移動装置30は、制御装置31の制御の下に駆動し、レーザー光Lが回転ミラー12に照射されている間に、入射位置Pを中心位置Cに対して移動させることも可能である。
図3に例示したように、入射位置Pが中心位置Cに一致している場合、長時間、反射面12a上の特定の点にレーザー光Lが照射され続けることになる。この結果、反射面12aが熱により歪む可能性がある。
これを避けるために、光走査装置2を用いて第一ワークW1及び第二ワークW2の界面W12に沿ってレーザー光Lを走査する際に、回転ミラー12の反射面12aにおける入射光L1の入射位置Pを移動させてもよい。たとえば、図6Aにおいて二点鎖線で示すように、回転ミラー12の反射面12aにおける入射光L1の入射位置Pを、回転シャフト11の回転軸Rが通る中心位置Cからずらすように制御してもよい。この場合、反射面12aの熱による歪みが抑制され、その結果、長時間の光走査が可能となる。
これを避けるために、光走査装置2を用いて第一ワークW1及び第二ワークW2の界面W12に沿ってレーザー光Lを走査する際に、回転ミラー12の反射面12aにおける入射光L1の入射位置Pを移動させてもよい。たとえば、図6Aにおいて二点鎖線で示すように、回転ミラー12の反射面12aにおける入射光L1の入射位置Pを、回転シャフト11の回転軸Rが通る中心位置Cからずらすように制御してもよい。この場合、反射面12aの熱による歪みが抑制され、その結果、長時間の光走査が可能となる。
回転ミラー12の反射面12aにおける入射光L1の入射位置Pは、回転シャフト11の回転軸Rが通る中心位置Cと、中心位置Cからずれた位置との間で移動するように、制御装置31にプログラムを組み込んでもよい。
この場合、たとえば中心位置Cの温度測定の結果に基づいて入射位置Pを中心位置Cからずらすという制御を制御装置31によって行うことにより、中心位置Cを適切な温度範囲に保つことができる。中心位置Cの温度測定は、たとえば、図示しない温度センサ(非接触式が好ましい)により行うことができる。
この場合、たとえば中心位置Cの温度測定の結果に基づいて入射位置Pを中心位置Cからずらすという制御を制御装置31によって行うことにより、中心位置Cを適切な温度範囲に保つことができる。中心位置Cの温度測定は、たとえば、図示しない温度センサ(非接触式が好ましい)により行うことができる。
なお、図6Aに例示した光走査装置2は、移動装置30によって回転機10を移動可能に構成されているが、レーザー光Lの入射光L1の光軸を移動可能に構成されてもよい。入射光L1の光軸を移動させるために、たとえば、レーザー光照射装置1と回転ミラー12との間に、ミラーやレンズなどを配置してもよい。
図6Bは、第2実施形態に係る光走査装置2の変形例、及びこれを備えるレーザー溶接装置A4の構成図である。
図6Bに例示するレーザー溶接装置A4において、回転ミラー12及びレーザー光照射装置1は、回転軸Rに垂直な2方向(X軸及びZ軸方向)に移動可能に構成されている。
折返しミラー16及びワーク移動装置50の構成は、溶接装置A2及びA3のものと同様であるため、説明を省略する。
図6Bに例示するレーザー溶接装置A4において、回転ミラー12及びレーザー光照射装置1は、回転軸Rに垂直な2方向(X軸及びZ軸方向)に移動可能に構成されている。
折返しミラー16及びワーク移動装置50の構成は、溶接装置A2及びA3のものと同様であるため、説明を省略する。
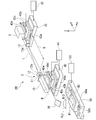
図6Bに例示するレーザー溶接装置A4において、光走査装置2は、回転軸Rに垂直な平面(XZ平面)に沿って回転機10(回転ミラー12)を移動させる移動ステージ40(第一移動ステージ)と、移動ステージ40の移動を制御する制御装置41(第一制御装置)と、を備えている。
制御装置41は、回転ミラー12の反射面12aにおける入射光L1の入射位置Pが、回転シャフト11の回転軸Rが通る中心位置Cと、中心位置Cからずれた位置との間で移動するように、移動ステージ40の移動を制御できる。
制御装置41は、回転ミラー12の反射面12aにおける入射光L1の入射位置Pが、回転シャフト11の回転軸Rが通る中心位置Cと、中心位置Cからずれた位置との間で移動するように、移動ステージ40の移動を制御できる。
図6Bに例示するレーザー溶接装置A4において、光走査装置2は、入射光L1を発するレーザー光照射装置1(光源)と、回転軸Rに垂直な平面(XZ平面)に沿ってレーザー光照射装置1を移動させる移動ステージ42(第二移動ステージ)と、移動ステージ42の移動を制御する制御装置43(第二制御装置)と、をさらに備えている。制御装置43は、回転ミラー12の反射面12aにおける入射光L1の入射位置Pが、回転シャフト11の回転軸Rが通る中心位置Cと、中心位置Cからずれた位置との間で移動するように、移動ステージ42の移動を制御できる。
図6Bに例示する光走査装置2において、移動ステージ40及び42は、後述するブラケットを除き、同様の構造を有している。
移動ステージ40(42)は、第一ベース40a(42a)と、ベース40a(42a)に対して水平移動可能な可動テーブル40b(42b)と、可動テーブル40b(42b)に固定された第二ベース40c(42c)と、第二ベース40c(42c)に対して垂直移動可能な可動テーブル40d(42d)と、を備えている。
移動ステージ40は、可動テーブル40dに固定され回転機10を保持するブラケット40eをさらに備えている。レーザー光照射装置1は、可動テーブル42dに固定されている。
移動ステージ40(42)は、第一ベース40a(42a)と、ベース40a(42a)に対して水平移動可能な可動テーブル40b(42b)と、可動テーブル40b(42b)に固定された第二ベース40c(42c)と、第二ベース40c(42c)に対して垂直移動可能な可動テーブル40d(42d)と、を備えている。
移動ステージ40は、可動テーブル40dに固定され回転機10を保持するブラケット40eをさらに備えている。レーザー光照射装置1は、可動テーブル42dに固定されている。
図6Bに例示した光走査装置2において、制御装置41(43)は、第一ベース40a(42a)に対する可動テーブル40b(42b)のX軸方向の移動を制御できる。また、制御装置41(43)は、第二ベース40c(42c)に対する可動テーブル40d(42d)のZ軸方向の移動を制御できる。
移動ステージ40による回転機10の移動、及び移動ステージ42によるレーザー光照射装置1の移動は、回転シャフト11の回転軸Rを傾けることなく行われる。したがって、回転機10及びレーザー光照射装置1の移動にかかわらず、回転シャフト11の先端に取り付けられた回転ミラー12を安定的に回転し続けることができる。
移動ステージ40による回転機10の移動、及び移動ステージ42によるレーザー光照射装置1の移動は、回転シャフト11の回転軸Rを傾けることなく行われる。したがって、回転機10及びレーザー光照射装置1の移動にかかわらず、回転シャフト11の先端に取り付けられた回転ミラー12を安定的に回転し続けることができる。
制御装置41によって移動ステージ40に固定された回転機10を、回転軸Rに垂直な平面(XZ平面)に沿って移動させることにより、回転ミラー12の反射面12aにおける入射光L1の入射位置Pを調整することができる。
同様に、制御装置43によって移動ステージ42に固定されたレーザー光照射装置1を、回転軸Rに垂直な平面(XZ平面)に沿って移動させることにより、回転ミラー12の反射面12aにおける入射光L1の入射位置Pを調整することができる。
同様に、制御装置43によって移動ステージ42に固定されたレーザー光照射装置1を、回転軸Rに垂直な平面(XZ平面)に沿って移動させることにより、回転ミラー12の反射面12aにおける入射光L1の入射位置Pを調整することができる。
上述した光走査装置2によれば、制御装置51によりワーク移動装置50の位置を制御することによって、ワーク界面W12に図2に例示するようなウォブリング溶接を高速に施すことができる。
また、反射面12aにおける入射光L1の入射位置Pを調整できるため、レーザー光Lの照射中に反射面12aの特定の点(たとえば、上述した中心位置C)に入射光L1が照射され続けることによる反射面12aの熱歪みを抑制することが可能となる。
また、図6Aに例示した光走査装置2と同様に、中心位置Cの温度測定の結果に基づいて入射位置Pを中心位置Cからずらすという制御を制御装置41(43)によって行うことにより、中心位置Cを適切な温度範囲に保つことができる。
また、反射面12aにおける入射光L1の入射位置Pを調整できるため、レーザー光Lの照射中に反射面12aの特定の点(たとえば、上述した中心位置C)に入射光L1が照射され続けることによる反射面12aの熱歪みを抑制することが可能となる。
また、図6Aに例示した光走査装置2と同様に、中心位置Cの温度測定の結果に基づいて入射位置Pを中心位置Cからずらすという制御を制御装置41(43)によって行うことにより、中心位置Cを適切な温度範囲に保つことができる。
上述した入射位置Pを中心位置Cからずらす制御を行う観点において、レーザー溶接装置A4の光走査装置2は、図6Bに例示した移動ステージ40及び42のうちの少なくとも一方を備えていればよい。また、移動ステージ40は、図6Bに例示したX方向の移動を担う部分(40a,40b)及びZ方向の移動を担う部分(40c、40d)のうちの少なくとも一方を備えていればよい。同様に、移動ステージ42は、図6Bに例示したX方向の移動を担う部分(42a,42b)及びZ方向の移動を担う部分(42c、42d)のうちの少なくとも一方を備えていればよい。
図6Bに例示した光走査装置2のように、移動ステージ40及び42の両方を備えて且つ、それぞれのステージにおいてX軸及びZ軸の両方向で位置制御が可能な場合、反射面12aと反射面13aとの間のアライメントの自由度を高めることができる。
一方、位置制御を担う構成要素を最小限にすることにより、より軽量な光走査装置2を提供できる。
図6Bに例示した光走査装置2のように、移動ステージ40及び42の両方を備えて且つ、それぞれのステージにおいてX軸及びZ軸の両方向で位置制御が可能な場合、反射面12aと反射面13aとの間のアライメントの自由度を高めることができる。
一方、位置制御を担う構成要素を最小限にすることにより、より軽量な光走査装置2を提供できる。
図6Bに例示するように、折返しミラー16とワークW1,W2との間に集光レンズFL2が配されていてもよい。この場合、折返しミラー16で反射したレーザー光Lを界面W12に集光できるため、界面W12に安定してよりエネルギー密度の高いレーザー光を照射することができる。
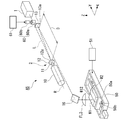
図6Cは、第2実施形態に係る光走査装置2の変形例、及びこれを備えるレーザー溶接装置A5の構成図である。
図6Cに例示するレーザー溶接装置A4は、回転ミラー12の反射面12aに入射するレーザー光Lの光軸を、回転軸Rに垂直な方向(たとえば図6CのX軸方向)にシフトできるように構成されている。
折返しミラー16及びワーク移動装置50の構成は、溶接装置A2~A4のものと同様であるため、説明を省略する。
図6Cに例示するレーザー溶接装置A4は、回転ミラー12の反射面12aに入射するレーザー光Lの光軸を、回転軸Rに垂直な方向(たとえば図6CのX軸方向)にシフトできるように構成されている。
折返しミラー16及びワーク移動装置50の構成は、溶接装置A2~A4のものと同様であるため、説明を省略する。
図6Cに例示するレーザー溶接装置A5において、光走査装置2は、レーザー光L(入射光L1)の光軸上に配される透過板60aと、透過板60aを回転させて前記光軸を平行移動させる第二回転機60bと、を備える透過板回転装置60と、第二回転機60bの回転を制御する回転制御装置61と、を備えている。
回転制御装置61は、回転ミラー12の反射面12aにおける入射光L1の入射位置Pが、回転シャフト11の回転軸Rが通る中心位置Cと、中心位置Cからずれた位置との間で移動するように、第二回転機60bの回転を制御できる。
回転制御装置61は、回転ミラー12の反射面12aにおける入射光L1の入射位置Pが、回転シャフト11の回転軸Rが通る中心位置Cと、中心位置Cからずれた位置との間で移動するように、第二回転機60bの回転を制御できる。
透過板60aは、レーザー光Lに対して透過性を有する板である。レーザー光Lの透過板60aに対する入射角が0度以外のときに、レーザー光Lは透過板60aにより屈折する。その結果、レーザー光Lの光軸は回転軸R(図6CのY軸)に垂直な方向と平行移動する。すなわち、回転制御装置61により、第二回転機60bを通じて、レーザー光Lの光軸に対する透過板60aの角度を制御することにより、回転ミラー12の反射面12aにおける入射光L1の入射位置Pを調整できる。
透過板回転装置60の動作は回転機10の移動を伴わないため、回転シャフト11の先端に取り付けられた回転ミラー12を安定的に回転し続けることができる。
透過板回転装置60の動作は回転機10の移動を伴わないため、回転シャフト11の先端に取り付けられた回転ミラー12を安定的に回転し続けることができる。
上述した光走査装置2によれば、制御装置51によりワーク移動装置50の位置を制御することによって、ワーク界面W12に図2に例示するようなウォブリング溶接を高速に施すことができる。
また、反射面12aにおける入射光L1の入射位置Pを調整できるため、レーザー光Lの照射中に反射面12aの特定の点(たとえば、上述した中心位置C)に入射光L1が照射され続けることによる反射面12aの熱歪みを抑制することが可能となる。
また、図6A及び6Bに例示した光走査装置2と同様に、中心位置Cの温度測定の結果に基づいて入射位置Pを中心位置Cからずらすという制御を回転制御装置61によって行うことにより、中心位置Cを適切な温度範囲に保つことができる。
また、反射面12aにおける入射光L1の入射位置Pを調整できるため、レーザー光Lの照射中に反射面12aの特定の点(たとえば、上述した中心位置C)に入射光L1が照射され続けることによる反射面12aの熱歪みを抑制することが可能となる。
また、図6A及び6Bに例示した光走査装置2と同様に、中心位置Cの温度測定の結果に基づいて入射位置Pを中心位置Cからずらすという制御を回転制御装置61によって行うことにより、中心位置Cを適切な温度範囲に保つことができる。
図6Cに例示するように、折返しミラー16とワークW1,W2との間に集光レンズFL2が配されていてもよい。この場合、折返しミラー16で反射したレーザー光Lを界面W12に集光できるため、界面W12に安定してよりエネルギー密度の高いレーザー光を照射することができる。
以上、本発明の好ましい実施形態を記載し説明してきたが、これらは本発明の例示的なものであり、限定するものとして考慮されるべきではないことを理解すべきである。追加、省略、置換、及びその他の変更は、本発明の範囲から逸脱することなく行うことができる。従って、本発明は、前述の説明によって限定されていると見なされるべきではなく、請求の範囲によって制限されている。
たとえば、図8に例示すように、回転ミラー12の反射面12aと反対側の回転シャフト取付け面12bが、反射面12aと平行且つ回転シャフト11の回転軸Rに対して傾いた傾斜面となっていてもよい。この構成によれば、図5に例示する回転シャフト取付け面12bが回転軸Rに対して直交した形態と比べて、回転ミラー12の厚みを小さく、軽量にすることができる。このため、回転ミラー12を高速回転し易くすることができる。
以上説明したレーザー光照射装置1の例として、通常のシングルモードレーザーやシングルモードファイバレーザーが挙げられる。レーザー光照射装置1としてファイバレーザーを用いる場合、平行光を得るためにレーザー光照射装置1と回転ミラー12との間にコリメータユニットを配してもよい。
ワークW1,W2同士の溶接について、図9の(a)~(d)に示すように様々な形態がある。図9において、(a)は突合せ溶接、(b)は重ね溶接、(c)は拝み溶接、(d)はLIB(リチウムイオンバッテリー)溶接の例である。上述の各実施形態に係る光走査装置2は、突合せ溶接のみならず、図9の(b)~(d)に例示するような各種溶接にも用いることができる。なお、図9の(b)のような配置の場合、ワークW1,W2が重なり合っている部分において、一方のワークW1の表面にレーザー光を照射して、界面W12での溶接を実施する。
上述の各実施形態に係る光走査装置2及びこれを備える溶接装置は、高速にかつ所望の位置にレーザー光照射を行うことができるため、各種材質のワークW1,W2の溶接に適用できる。特に、ワークW1,W2の少なくとも一方が、溶接の難しい銅やアルミ等の高反射材である場合に、上述したウォブリング溶接が好適である。
上述の各実施形態に係る光走査装置2及びこれを備える溶接装置は、高速にかつ所望の位置にレーザー光照射を行うことができるため、各種材質のワークW1,W2の溶接に適用できる。特に、ワークW1,W2の少なくとも一方が、溶接の難しい銅やアルミ等の高反射材である場合に、上述したウォブリング溶接が好適である。
アルミのように溶融状態における粘度が小さい金属では、溶接時にスパッタが発生しやすい。スパッタ発生を抑制するために、細く集光したレーザー光を高速ウォブリングによって照射する方法が有効である。
図1D及び6B~6Cに例示したようなレーザー溶接装置A3~A5は、集光レンズ(FL,FL2)を備えているため、上述のスパッタ発生を抑制できる。また、図1Cに例示したようなレーザー溶接装置A2においても、あらかじめ適切な距離Dを設定し、レーザー光照射装置1からワークW1,W2までの光路長に応じた適切な集光レンズを配置することで、上述のスパッタ発生を抑制できる。
図1D及び6B~6Cに例示したようなレーザー溶接装置A3~A5は、集光レンズ(FL,FL2)を備えているため、上述のスパッタ発生を抑制できる。また、図1Cに例示したようなレーザー溶接装置A2においても、あらかじめ適切な距離Dを設定し、レーザー光照射装置1からワークW1,W2までの光路長に応じた適切な集光レンズを配置することで、上述のスパッタ発生を抑制できる。
上述の各実施形態に係る光走査装置2による高速なレーザー光照射は、たとえば、リチウムイオン電池の製造工程に応用できる。リチウムイオン電池の製造工程において、電解液を注入した缶パッケージを封止するために、缶パッケージの注液口に金属蓋を重ねて溶接する工程(封止工程)がある。
この工程において、電解液付着による溶接欠陥が非常に発生しやすく、リチウムイオン電池の安定量産を難しくしている。この溶接工程において、注液口と金属蓋との界面(接面)に上述の各実施形態に係る光走査装置2を用いることにより、注液口周りに付着した電解液を効果的に除去することができる。
特に、上述したレーザー溶接装置A2及びA3を用いて、注液口と金属蓋との界面(接面)に、図7に例示するような渦巻き状の軌跡で高速にレーザー光照射を行うことにより、注液口周りに付着した電解液を効果的に除去することができる。
この工程において、電解液付着による溶接欠陥が非常に発生しやすく、リチウムイオン電池の安定量産を難しくしている。この溶接工程において、注液口と金属蓋との界面(接面)に上述の各実施形態に係る光走査装置2を用いることにより、注液口周りに付着した電解液を効果的に除去することができる。
特に、上述したレーザー溶接装置A2及びA3を用いて、注液口と金属蓋との界面(接面)に、図7に例示するような渦巻き状の軌跡で高速にレーザー光照射を行うことにより、注液口周りに付着した電解液を効果的に除去することができる。
前記金属蓋を前記電解液が注入された缶パッケージの注液口に重ねる前に、上述の各実施形態に係る光走査装置2を用いて前記注液口周縁に沿ってレーザー光を走査してもよい。この場合、缶パッケージの注液口から電解液を注入した後であって金属蓋による封止工程を行う前に、注液口周りに付着した電解液を予め除去することができる(予備照射工程)。その結果、封止工程における金属蓋と注液口との溶接強度をより高めることができる。
開口を有する金属缶に、前記開口を閉塞するように前記注液口を有するキャップ体を重ね、上述の各実施形態に係る光走査装置2を用いて、前記金属缶と前記キャップ体との界面に沿ってレーザー光を走査して前記缶パッケージを得ることができる。
より具体的に、電極コイルなどのリチウムイオン電池構成部品を金属缶内に収容した後に、金属缶の開口周縁と注液口を有するキャップ体とを溶接することで、注液口を有する缶パッケージを得ることができる(缶パッケージ作製工程)。
上述した缶パッケージ作製工程における溶接、予備照射工程における電解液除去、及び封止工程における溶接を、同一の光走査装置2により実現することができる。
また、金属缶、キャップ体、及び金属蓋の材質は、アルミ、ステンレス、鉄のいずれかであってもよい。典型的には、金属缶、キャップ体、及び金属蓋の材質は同一である。上述の各実施形態に係る光走査装置2を用いたレーザー光の高速ウォブリングは、これら金属の溶接に好適である。
より具体的に、電極コイルなどのリチウムイオン電池構成部品を金属缶内に収容した後に、金属缶の開口周縁と注液口を有するキャップ体とを溶接することで、注液口を有する缶パッケージを得ることができる(缶パッケージ作製工程)。
上述した缶パッケージ作製工程における溶接、予備照射工程における電解液除去、及び封止工程における溶接を、同一の光走査装置2により実現することができる。
また、金属缶、キャップ体、及び金属蓋の材質は、アルミ、ステンレス、鉄のいずれかであってもよい。典型的には、金属缶、キャップ体、及び金属蓋の材質は同一である。上述の各実施形態に係る光走査装置2を用いたレーザー光の高速ウォブリングは、これら金属の溶接に好適である。
上述の各光走査装置2を用いたレーザー光の走査により、上述した缶パッケージ作製工程における溶接、予備照射工程における電解液除去、及び封止工程における溶接を行う際に、回転ミラー12の反射面12aにおける入射光L1の入射位置Pを移動させてもよい。この場合、反射面12aの熱による歪みが抑制され、その結果、長時間の溶接/電解液除去作業が可能となる。
また、上述の各光走査装置2を用いたレーザー光の走査により、上述した缶パッケージ作製工程における溶接、予備照射工程における電解液除去、及び封止工程における溶接を行う際に、回転軸Rに対して平行に光路調整ミラー13を移動することにより、溶接対象同士の界面又は注液口周りにおける光の走査幅を変えてもよい。この場合、レーザー光Lの照射対象の材質や溶接形態に合わせた最適な走査(溶接)を行うことができる。
また、上述の各光走査装置2を用いたレーザー光の走査により、上述した缶パッケージ作製工程における溶接、予備照射工程における電解液除去、及び封止工程における溶接を行う際に、回転軸Rに対して平行に光路調整ミラー13を移動することにより、溶接対象同士の界面又は注液口周りにおける光の走査幅を変えてもよい。この場合、レーザー光Lの照射対象の材質や溶接形態に合わせた最適な走査(溶接)を行うことができる。
上述した各実施形態に係る光走査装置2は、紫外線(UV)などの光を照射する他の装置に適用してもよい。
本発明のいくつかの態様によれば、円運動を含む軌跡の高速走査が可能な光走査装置、光走査方法、及びリチウムイオン電池の製造方法を提供できる。
2…光走査装置
10…回転機
11…回転シャフト
12…回転ミラー
12a…反射面
12b…回転シャフト取付け面
C…中心位置
L1…入射光
N…法線
P…入射位置
R…回転軸
θ1…第1角度
θ2…第2角度
10…回転機
11…回転シャフト
12…回転ミラー
12a…反射面
12b…回転シャフト取付け面
C…中心位置
L1…入射光
N…法線
P…入射位置
R…回転軸
θ1…第1角度
θ2…第2角度
Claims (18)
- 回転シャフトを備える第一回転機と、
前記回転シャフトの先端に取り付けられた回転ミラーと、を備え、
前記回転ミラーの反射面の法線は、前記反射面に入射する入射光の光軸に対して第1角度で傾いており、
前記回転シャフトの回転軸は、前記反射面の法線に対して第2角度で傾いており、
前記第1角度は、前記第2角度よりも大きい、ことを特徴とする光走査装置。 - 前記入射光の光軸と前記回転シャフトの回転軸が一致しない、ことを特徴とする請求項1に記載の光走査装置。
- 前記回転ミラーの反射面における前記入射光の入射位置Pは、前記回転シャフトの回転軸が通る中心位置と一致している、ことを特徴とする請求項1又は2に記載の光走査装置。
- 前記回転ミラーの反射面における前記入射光の入射位置Pは、前記回転シャフトの回転軸が通る中心位置からずれている、ことを特徴とする請求項1又は2に記載の光走査装置。
- 前記回転軸に垂直な平面に沿って前記第一回転機を移動させる第一移動ステージと、
前記第一移動ステージの移動を制御する第一制御装置と、をさらに備え、
前記第一制御装置は、前記回転ミラーの反射面における前記入射光の入射位置Pが、前記回転シャフトの回転軸が通る中心位置と、前記中心位置からずれた位置との間で移動するように、前記第一移動ステージの移動を制御する、ことを特徴とする請求項1~3のいずれか一項に記載の光走査装置。 - 前記入射光の光軸上に配置される透過板と、前記透過板を回転させて前記光軸を平行移動させる第二回転機と、を備える透過板回転装置と、
前記第二回転機の回転を制御する回転制御装置と、をさらに備え、
前記回転制御装置は、前記回転ミラーの反射面における前記入射光の入射位置Pが、前記回転シャフトの回転軸が通る中心位置と、前記中心位置からずれた位置との間で移動するように、前記第二回転機の回転を制御する、ことを特徴とする請求項1~3のいずれか一項に記載の光走査装置。 - 前記入射光を発する光源と、
前記回転軸に垂直な平面に沿って前記光源を移動させる第二移動ステージと、
前記第二移動ステージの移動を制御する第二制御装置と、をさらに備え、
前記第二制御装置は、前記回転ミラーの反射面における前記入射光の入射位置Pが、前記回転シャフトの回転軸が通る中心位置と、前記中心位置からずれた位置との間で移動するように、前記第二移動ステージの移動を制御する、ことを特徴とする請求項1~3のいずれか一項に記載の光走査装置。 - 前記回転ミラーの反射面で反射した光を反射する光路調整ミラーと、
前記回転軸に対して平行に前記光路調整ミラーを移動させる第三移動ステージと、
前記第三移動ステージの移動を制御する第三制御装置と、をさらに備える、ことを特徴とする請求項1~7のいずれか一項に記載の光走査装置。 - 前記回転ミラーの反射面で反射した光を反射する光路調整ミラーと、
前記回転軸に対して平行に前記第一回転機及び前記光路調整ミラーを一体として移動させる第四移動ステージと、
前記第四移動ステージの移動を制御する第四制御装置と、をさらに備える、ことを特徴とする請求項1~7のいずれか一項に記載の光走査装置。 - 前記回転ミラーの前記反射面と反対側の回転シャフト取付け面は、前記回転シャフトの回転軸に対して直交した平坦面である、ことを特徴とする請求項1~9のいずれか一項に記載の光走査装置。
- 前記回転ミラーの前記反射面と反対側の回転シャフト取付け面は、前記反射面と平行且つ前記回転シャフトの回転軸に対して傾いた傾斜面である、ことを特徴とする請求項1~9のいずれか一項に記載の光走査装置。
- 請求項1~11のいずれか一項に記載の光走査装置を用いて第一ワーク及び第二ワークの界面に沿ってレーザー光を走査する際に、前記回転ミラーの反射面における前記入射光の入射位置Pを移動させる、ことを特徴とする光走査方法。
- 請求項8又は9に記載の光走査装置を用いて第一ワーク及び第二ワークの界面に沿ってレーザー光を走査する光走査方法であって、
前記回転軸に対して平行に前記光路調整ミラーを移動することにより、前記界面における光の走査幅を変える、ことを特徴とする光走査方法。 - 前記第一ワーク及び前記第二ワークの少なくとも一方がアルミである、ことを特徴とする請求項12又は13に記載の光走査方法。
- 電解液が注入された缶パッケージの注液口に金属蓋を重ね、
請求項1~11のいずれか一項に記載の光走査装置を用いて、前記注液口と前記金属蓋との界面に沿ってレーザー光を走査する、ことを特徴とするリチウムイオン電池の製造方法。 - 前記金属蓋を前記電解液が注入された缶パッケージの注液口に重ねる前に、前記光走査装置を用いて前記注液口の周縁に沿ってレーザー光を走査する、ことを特徴とする請求項15に記載のリチウムイオン電池の製造方法。
- 開口を有する金属缶に、前記開口を閉塞するように前記注液口を有するキャップ体を重ね、
前記光走査装置を用いて、前記金属缶と前記キャップ体との界面に沿ってレーザー光を走査して前記缶パッケージを得る、こと特徴とする請求項15又は16に記載のリチウムイオン電池の製造方法。 - 前記金属缶、前記キャップ体、及び前記金属蓋の材質は、アルミ、ステンレス、鉄のいずれかである、ことを特徴とする請求項15~17のいずれか一項に記載のリチウムイオン電池の製造方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019-042639 | 2019-03-08 | ||
| JP2019042639 | 2019-03-08 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020184516A1 true WO2020184516A1 (ja) | 2020-09-17 |
Family
ID=72426279
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/010036 WO2020184516A1 (ja) | 2019-03-08 | 2020-03-09 | 光走査装置、光走査方法、及びリチウムイオン電池の製造方法 |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2020184516A1 (ja) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62120370U (ja) * | 1986-01-24 | 1987-07-30 | ||
| JPH0219819A (ja) * | 1988-07-08 | 1990-01-23 | Nikon Corp | 角度制御装置 |
| JPH10202380A (ja) * | 1997-01-20 | 1998-08-04 | Toshiba Corp | レ−ザ溶接方法および二次電池容器の製法 |
| CN202649599U (zh) * | 2012-05-03 | 2013-01-02 | 山东大学 | 基于旋转镜技术改善激光匀光效果与抑制散斑装置 |
| JP2013140682A (ja) * | 2011-12-28 | 2013-07-18 | Toshiba Corp | 二次電池及び二次電池の製造方法 |
| JP2016075722A (ja) * | 2014-10-02 | 2016-05-12 | 大日本印刷株式会社 | 照明装置、光学モジュール及び投射装置 |
| JP2016075858A (ja) * | 2014-10-08 | 2016-05-12 | 大日本印刷株式会社 | 光走査装置、光学モジュール、照明装置および投射装置 |
-
2020
- 2020-03-09 WO PCT/JP2020/010036 patent/WO2020184516A1/ja active Application Filing
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62120370U (ja) * | 1986-01-24 | 1987-07-30 | ||
| JPH0219819A (ja) * | 1988-07-08 | 1990-01-23 | Nikon Corp | 角度制御装置 |
| JPH10202380A (ja) * | 1997-01-20 | 1998-08-04 | Toshiba Corp | レ−ザ溶接方法および二次電池容器の製法 |
| JP2013140682A (ja) * | 2011-12-28 | 2013-07-18 | Toshiba Corp | 二次電池及び二次電池の製造方法 |
| CN202649599U (zh) * | 2012-05-03 | 2013-01-02 | 山东大学 | 基于旋转镜技术改善激光匀光效果与抑制散斑装置 |
| JP2016075722A (ja) * | 2014-10-02 | 2016-05-12 | 大日本印刷株式会社 | 照明装置、光学モジュール及び投射装置 |
| JP2016075858A (ja) * | 2014-10-08 | 2016-05-12 | 大日本印刷株式会社 | 光走査装置、光学モジュール、照明装置および投射装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2923791B1 (en) | Laser machining method | |
| TWI551384B (zh) | Processing equipment and processing methods | |
| EP0781622A2 (en) | Process and apparatus for welding workpieces with two or more laser beams whose spots are oscillated across welding direction | |
| JP6740267B2 (ja) | レーザ加工装置 | |
| JP2001276988A (ja) | レーザ加工装置 | |
| JP2021522072A (ja) | 3次元物体を製造するための装置及び方法 | |
| WO2019198443A1 (ja) | レーザ溶接装置 | |
| KR20210042399A (ko) | 후면 표면 용접 시스템 및 방법 | |
| KR20110129791A (ko) | 레이저 가공 시스템 및 이를 이용한 레이저 가공 방법 | |
| CN110977159A (zh) | 一种形成环形光斑的激光光路组件 | |
| JP2011067840A (ja) | レーザー加工装置 | |
| CN113634925A (zh) | 一种激光旋切加工系统及方法 | |
| WO2020184516A1 (ja) | 光走査装置、光走査方法、及びリチウムイオン電池の製造方法 | |
| JP2005254618A (ja) | 樹脂溶着装置 | |
| JP2019141852A (ja) | レーザ照射装置、及び、レーザ加工方法 | |
| WO2014203489A1 (ja) | 外装缶封口方法及び外装缶封口装置 | |
| JP7213441B2 (ja) | レーザ溶接方法及びレーザ溶接装置 | |
| JP2001191189A (ja) | レーザ溶接装置 | |
| JP7369915B2 (ja) | レーザ溶接装置及びそれを用いたレーザ溶接方法 | |
| CN114054943A (zh) | 一种螺旋动态往复扫描光学系统 | |
| JP2001287068A (ja) | レーザ切断トーチ | |
| JP3479876B2 (ja) | レーザ出射光学系 | |
| JP2011255405A (ja) | レーザ照射方法および装置 | |
| US20230330776A1 (en) | Method of manufacturing metal component and laser welding apparatus | |
| JP2000141070A (ja) | レーザ加工ヘッド |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20770816 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20770816 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |