WO2019087364A1 - 直流モータの制御装置 - Google Patents
直流モータの制御装置 Download PDFInfo
- Publication number
- WO2019087364A1 WO2019087364A1 PCT/JP2017/039805 JP2017039805W WO2019087364A1 WO 2019087364 A1 WO2019087364 A1 WO 2019087364A1 JP 2017039805 W JP2017039805 W JP 2017039805W WO 2019087364 A1 WO2019087364 A1 WO 2019087364A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- phase
- rotation
- signal
- information
- motor
- Prior art date
Links
Images




























Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/145—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the relative movement between the Hall device and magnetic fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/245—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains using a variable number of pulses in a train
- G01D5/2454—Encoders incorporating incremental and absolute signals
Abstract
回転センサの故障の有無を判定する手段として、安価なホール素子の出力信号を利用して比較的高い精度の位置情報を生成できる、直流モータの制御装置を提供する。 イニシャライズ駆動信号により直流モータを正逆双方向に所定の回転数で起動運転し、該直流モータを駆動して得られる回転センサユニットからのA相若しくはB相の出力信号と位置決め情報と、前記イニシャライズ駆動信号との同期の関係から、回転軸に対する前記MRセンサの絶対原点位置(Zα)の情報を取得し、さらに、前記絶対原点位置とホール素子から得られた回転角度の情報との位相差に基づき同期判定情報を生成し、前記A相若しくは前記B相、及び前記絶対原点位置の情報、及び前記同期判定情報の全データをアブソリュート信号のデータに変換して書き換え可能な不揮発性メモリに記録する。
Description
本発明は、直流モータの制御装置に関するものであり、特に、被駆動体を駆動する直流モータを目標速度及び目標位置で作動させるサーボ制御に適した、直流モータの制御装置に係るものである。
直流モータは、構造が比較的簡単で安定した性能が得られ、かつ、安価なため、自動車の補器類等、各種の制御システムを構成する機器の駆動源として、様々な分野に広く採用されている。
特許文献1の図15、図16には、モータの回転軸の角度を検出するセンサとして3個のホール素子と1個のGMR検出器を採用し、それらの信号値に基づいて、3相永久磁石モータの任意の特定位置の情報やトルク変動情報を得る発明が開示されている。
特許文献2には、モータの回転軸の角度を検出する動作原理の異なる異種のセンサ、例えばMRセンサとこのMRセンサよりも高精度のレゾルバとを備え、故障に対する冗長性が高く、絶対角度の検出を高い精度で行えるようにした発明が開示されている。
また、特許文献3には、モータの回転角検出装置が、GMRセンサとAMRセンサとを備え、GMRセンサの出力によってAMRセンサの出力を補正して機械角θを求めると共に、操舵中にGMRセンサが故障した場合には、AMRセンサの出力のみで機械角θを検出するバックアップ制御を実行する発明が開示されている。
自動車等の各被駆動部材を駆動する直流モータを、サーボモータとして閉ループで制御するためには、モータの回転速度、回転位相、回転方向等の正確な情報が必要である。これらの正確な情報により、被駆動部材の起動・停止、速度制御、位置制御等を行うことで、被駆動部材の安全な運転が可能になる。さらに、自動運転制御、若しくは自動運転制御を促進するためには、より高精度の情報が必要であり、モータの回転軸の絶対角度もしくは絶対的原点位置(アブソリュート位置:Zo)の情報が必要になる。
また、被駆動部材の安全な運転を行うためには、モータの回転軸の角度を検出する角度センサの故障に対する冗長性を高めることも必要である。
特許文献1に記載の発明では、負荷トルクの変動に起因するモータの速度変動を抑制するものの、絶対的原点位置の検出や、センサ故障時の対策については開示されていない。
特許文献2に記載の発明は、絶対的原点位置の情報を得るために、異種のセンサとして、VRレゾルバとMRセンサとを組み合わせた構造を採用している。そのために、VRレゾルバ用の磁性材のロータとMRセンサ用のマグネットとが軸方向に配列されており、全体の構成が複雑で、回転角を検出する装置が大型化し、コストも高いものと考えられる。
特許文献3に記載の発明では、GMRセンサが故障した場合のバックアップ制御を実行する際に、高い精度の位相情報で直流モータのサーボ制御を行うことについては開示されていない。
特許文献2に記載の発明は、絶対的原点位置の情報を得るために、異種のセンサとして、VRレゾルバとMRセンサとを組み合わせた構造を採用している。そのために、VRレゾルバ用の磁性材のロータとMRセンサ用のマグネットとが軸方向に配列されており、全体の構成が複雑で、回転角を検出する装置が大型化し、コストも高いものと考えられる。
特許文献3に記載の発明では、GMRセンサが故障した場合のバックアップ制御を実行する際に、高い精度の位相情報で直流モータのサーボ制御を行うことについては開示されていない。
本発明の1つの目的は、MRセンサを含む回転センサが故障した場合のバックアップ制御のための位置情報として、安価なホール素子の出力信号を利用しながら高精度の位置情報を生成できる、ブラシ付き直流モータの制御装置を提供することにある。
本発明の他の目的は、MRセンサが故障した場合に、ホール素子の出力で信号比較的高精度にバックアップ制御を継続できる直流モータの制御装置を提供することにある。
本発明の1つの態様によれば、モータ制御装置は、直流モータの駆動信号を生成して出力する制御ユニットと、前記直流モータの回転軸の回転を検知する回転センサユニットとを備え、前記直流モータの前記駆動信号を生成し、前記回転軸に固定されたアマチュアにブラシを介して供給される電力を制御するモータ制御装置において、前記回転センサユニットは、前記回転軸の一端に固定された平板状のマグネットと、前記回転軸の軸方向において前記マグネットに対向する位置で前記直流モータのステータ側に固定された1対のMRセンサと少なくとも3個のホール素子及び処理回路部とを備えており、前記1対のMRセンサの出力に基づいて、前記回転軸の回転に伴うインクリメンタルなA相、B相の信号と、該A相、B相の出力信号が特定の関係にある状態を示す位置決め情報とを生成して出力すると共に、前記ホール素子の出力に基づいて前記回転軸の回転角度の情報を生成して出力するように構成されており、前記制御ユニットは、イニシャライズ駆動信号により前記直流モータを正逆双方向に所定の回転数で起動運転し、該直流モータを駆動して得られる前記回転センサユニットからの前記A相若しくは前記B相の出力信号と前記位置決め情報と、前記イニシャライズ駆動信号との同期の関係から、前記回転軸に対する前記MRセンサの絶対原点位置(Zα)の情報を取得し、さらに、前記絶対原点位置と前記回転角度の情報との位相差に基づき同期判定情報を生成し、前記A相若しくは前記B相、及び前記絶対原点位置の情報、及び前記同期判定情報の全データをアブソリュート信号のデータに変換して書き換え可能な不揮発性メモリに記録するように構成されていることを特徴とする。
これにより、MRセンサを含む回転センサの故障した場合のバックアップ制御を実行する際の位置情報として、安価なホール素子の出力信号を利用しながら高精度の位置情報を生成できる、安価で信頼性の高い、ブラシ付き直流モータの制御装置を提供することができる。
本発明の他の態様によれば、駆動信号を生成して出力し、ブラシレスDCサーボモータのU相、V相、W相の3相の各ステータコイルに供給される電力を制御する制御ユニットと、多極の永久磁石を有するロータの回転を検知する1個の回転センサユニットとを備えたブラシレスDCサーボモータの制御装置において、前記回転センサユニットは、前記ロータの回転軸の一端に固定され、径方向に着磁された1組のN極領域とS極領域を有する平板状のマグネットと、該マグネットに対向する位置でステータ側に固定された1対のMRセンサ、少なくとも3個のホール素子及び処理回路部とを備えており、前記処理回路部は、前記マグネットのN極領域とS極領域の境界線上の位置を、マグネット原点位置とし、前記1対のMRセンサの出力に基づいて、前記回転軸の回転に伴うA相、B相の信号を生成して出力し、前記マグネットの原点位置の情報を生成すると共に、さらに、前記ホール素子の出力に基づいて前記回転軸の回転角度の情報を生成して出力するように構成されており、前記制御ユニットは、前記ロータの極数に合わせて、前記回転センサユニットの前記A相若しくは前記B相の出力信号の立ち上がり位相に同期する、前記U相、V相、W相の各位相情報を生成する機能と、前記3相のいずれか1相のステータコイルへの駆動信号が零から立ち上がる位相と、該モータの駆動により得られる前記1相のステータコイルへの逆起電力の積分値ピークの位相と、前記駆動信号の零に対応する前記回転センサユニットからの前記A相若しくは前記B相の出力信号の立ち上がり位相との同期関係に基づき、前記駆動信号に対する前記回転軸の絶対原点位置を取得する機能と、前記駆動信号の零に対応する前記A相又は前記B相の出力信号の立ち上がりに同期する360度間隔の複数のZ相信号を設定する機能と、前記絶対原点位置と前記回転角度の情報との位相差に基づき同期判定情報を生成する機能とを備えており、前記マグネットは前記原点位置が、前記回転軸の前記絶対原点位置と同期する位置に固定されており、前記回転センサユニットを前記U相、V相、及びW相のロータリーエンコーダとして、前記モータを駆動するように構成されていることを特徴とする。
これにより、MRセンサを含む回転センサが故障した場合のバックアップ制御を実行する際の位置情報として、安価なホール素子の出力信号を利用しながら高精度の位置情報を生成できる、安価で信頼性の高い、ブラシレス直流モータの制御装置を提供することができる。
本発明の他の態様によれば、ブラシ付き直流モータが前記回転センサユニット及び前記制御ユニットを備えており、前記回転センサユニットの故障の判定において、前記MRセンサが故障したと判定された場合、前記ホール素子の出力に基づいて前記アマチュアに供給される電力を制御することを特徴とする。
これにより、MRセンサを含む回転センサが故障した場合のバックアップ制御を実行する際の位置情報として、安価なホール素子の出力信号を利用しながら比較的高精度の位置情報を生成できる、安価で信頼性の高い直流モータの制御装置を提供することができる。
本発明の他の態様によれば、ブラシレスDCサーボモータが、前記回転センサユニット及び前記制御ユニットを備えており、前記回転センサユニットの故障の判定において、前記MRセンサが故障したと判定された場合、前記ホール素子の出力に基づいて前記ステータコイルに供給される電力を制御することを特徴とする。
これにより、MRセンサを含む回転センサの故障した場合のバックアップ制御を実行する際の位置情報として、安価なホール素子の出力信号を利用しながら比較的高精度の位置情報を生成できる、安価で信頼性の高い、ブラシレスDCサーボモータの制御装置を提供することができる。
本発明によれば、MRセンサを含む回転センサが故障した場合のバックアップ制御を実行する際の位置情報として、安価なホール素子の出力信号を利用しながら比較的高精度の位置情報を生成できる、安価で信頼性の高い、ブラシレス直流モータの制御装置を提供することができる。
また、MRセンサを含む回転センサの故障の有無を判定する手段として、安価なホール素子の出力信号を利用して比較的高い精度の位置情報を生成可能な、直流モータの制御装置を提供することができる。
回転センサユニットのGMRセンサとホール素子は、マグネットを共通に使用するため、構成は簡単であり、小型で安価に構成できる。
また、MRセンサを用いて生成された高い精度の絶対原点位置情報と安価なホール素子を採用して得られた回転角度の情報との同期をとることで、信頼性が高いにも拘らず、小型かつ安価な回転センサユニットを提供することができる。
さらに、本発明によれば、MRセンサが故障した場合でも、比較的高精度にサーボ制御を継続できる直流モータの制御装置を提供することができる。
また、MRセンサを含む回転センサの故障の有無を判定する手段として、安価なホール素子の出力信号を利用して比較的高い精度の位置情報を生成可能な、直流モータの制御装置を提供することができる。
回転センサユニットのGMRセンサとホール素子は、マグネットを共通に使用するため、構成は簡単であり、小型で安価に構成できる。
また、MRセンサを用いて生成された高い精度の絶対原点位置情報と安価なホール素子を採用して得られた回転角度の情報との同期をとることで、信頼性が高いにも拘らず、小型かつ安価な回転センサユニットを提供することができる。
さらに、本発明によれば、MRセンサが故障した場合でも、比較的高精度にサーボ制御を継続できる直流モータの制御装置を提供することができる。
以下、本発明の実施の形態を、図1~図7Bを参照しながら、詳細に説明する。
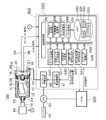
図1は、本発明の第1の実施例に基づく、ブラシ付き直流モータの制御装置の機能ブロック図である。直流モータ100は、ブラシ付き直流モータ(以下、単に直流モータ)であり、有底筒状に形成されたモータハウジング10の内部に、永久磁石11が固定されている。また、アマチュア12と一体の回転軸13が、モータハウジング10とエンドブラケット(若しくはシールドキャップ)18に設けられた1対の軸受24、25により、回転自在に保持されている。コスト低減の観点から、例えば、軸受として回転軸13の一端のみがボールベアリング25で保持され、他端は平軸受24で保持されている。回転軸13に固定された整流子17に、ブラシホルダーに保持されたブラシ16が摺接している。直流モータ100のアマチュア12には、バッテリ42から電源スイッチ43、DCモータ駆動回路40、給電端子15、ブラシ16、および整流子17を介して、駆動電流が供給される。アマチュア12は、DCモータ駆動回路40から供給される駆動電流の向き・大きさに応じて、正回転または逆回転する。回転軸13の他端には、減速機14を構成するピニオン等が設けられており、回転軸13の回転は、減速機14で減速され、直接もしくはクラッチを介して、被駆動部材50、例えば自動車のワイパアームに伝達される。
図1は、本発明の第1の実施例に基づく、ブラシ付き直流モータの制御装置の機能ブロック図である。直流モータ100は、ブラシ付き直流モータ(以下、単に直流モータ)であり、有底筒状に形成されたモータハウジング10の内部に、永久磁石11が固定されている。また、アマチュア12と一体の回転軸13が、モータハウジング10とエンドブラケット(若しくはシールドキャップ)18に設けられた1対の軸受24、25により、回転自在に保持されている。コスト低減の観点から、例えば、軸受として回転軸13の一端のみがボールベアリング25で保持され、他端は平軸受24で保持されている。回転軸13に固定された整流子17に、ブラシホルダーに保持されたブラシ16が摺接している。直流モータ100のアマチュア12には、バッテリ42から電源スイッチ43、DCモータ駆動回路40、給電端子15、ブラシ16、および整流子17を介して、駆動電流が供給される。アマチュア12は、DCモータ駆動回路40から供給される駆動電流の向き・大きさに応じて、正回転または逆回転する。回転軸13の他端には、減速機14を構成するピニオン等が設けられており、回転軸13の回転は、減速機14で減速され、直接もしくはクラッチを介して、被駆動部材50、例えば自動車のワイパアームに伝達される。
回転軸13の一端部及び直流モータ100のエンドカバー26には、回転軸13の回転に伴うインクリメンタル信号を出力する回転センサユニット20が設けられている。回転センサユニット20は、回転軸13の一端面に固定された平板状のマグネット21と、回転軸の軸方向においてこのマグネット21に対向して配置された1対のMRセンサ22(第1の磁気センサ)、及び、3個のホール素子27(第1の磁気センサより分解能の劣る第2の磁気センサ)を含んでいる(図2A、図2B参照)。なお、第2の磁気センサとして、ホール素子の代わりに、ホール素子の出力信号を整え増幅してパルス信号を出力する、ホールICを用いても良い。以下では、ホール素子又はホールICを、単に「ホール素子」と記載する。
この回転センサユニット20のMRセンサの出力をデジタル信号として処理した、A相、B相信号、及び位置決め信号Sが、通信ケーブル28を介して、制御ユニット300へ送信される。また、回転センサユニット20のホール素子のアナログ信号(又はパルス信号)も通信ケーブル29を介して、制御ユニット300へ送信される。
直流モータ100の1回転毎に回転センサユニットから出力されるMRセンサ対応のパルスの数は、制御に必要とされる分解能等に応じて、任意に設定される。MRセンサの素子としてGMRを用いた場合、回転軸の1回転あたり、例えば36000パルスの出力を得ることができ、3個のホール素子により、例えば、1回転当たり1200パルスの出力を得ることができる。
この回転センサユニット20のMRセンサの出力をデジタル信号として処理した、A相、B相信号、及び位置決め信号Sが、通信ケーブル28を介して、制御ユニット300へ送信される。また、回転センサユニット20のホール素子のアナログ信号(又はパルス信号)も通信ケーブル29を介して、制御ユニット300へ送信される。
直流モータ100の1回転毎に回転センサユニットから出力されるMRセンサ対応のパルスの数は、制御に必要とされる分解能等に応じて、任意に設定される。MRセンサの素子としてGMRを用いた場合、回転軸の1回転あたり、例えば36000パルスの出力を得ることができ、3個のホール素子により、例えば、1回転当たり1200パルスの出力を得ることができる。
直流モータの制御ユニット300は、通信制御部310、メモリ制御部320、自己イニシャライズ設定部340、回転センサ出力処理部341、Z相信号生成部342、Z相の幅信号生成部343、絶対原点位置信号生成部344、DCサーボ制御部345、PWM信号生成部346、位相同期処理部347、及び、センサエラー判定処理部348等の機能を有している。シングルチップマイコンは、CPU、メモリ、発振回路、タイマー、I/Oインタフェース、シリアルI/F等を1つのLSIに集積したものであり、メモリに保持されたプログラムをCPU上で実行することで、直流モータの制御ユニット300の上記各機能が実現される。
被駆動部材が、自動車に搭載される機器の場合、制御ユニット300の各構成要素は、車載のECU500の中に組みこむことができる。この場合、DCモータ駆動制御部41やDCモータ駆動回路40の機能も、車載のECUの中に組みこむことができる。ECU500は、制御ユニット300に対する上位のプロセッサと上位のメモリを含むコントロールユニットを備えている。
被駆動部材が、自動車に搭載される機器の場合、制御ユニット300の各構成要素は、車載のECU500の中に組みこむことができる。この場合、DCモータ駆動制御部41やDCモータ駆動回路40の機能も、車載のECUの中に組みこむことができる。ECU500は、制御ユニット300に対する上位のプロセッサと上位のメモリを含むコントロールユニットを備えている。
なお、メモリ330には、ROM331、RAM332、及び、少なくとも1つの書き換え(重ね書き)可能な不揮発性のメモリが含まれており、バス350を介してCPUと接続されている。ROM331には、電源投入時やリセット時に実行するプログラムやプログラム実行中に変化しない定数が保存される。ROMとしてフラッシュメモリを採用しても良い。RAM332にはプログラムの変数や、外部からの指令値や、後述する多回転・アブソリュート位置信号のデータ等が保持される。ホール素子のアナログ信号のデータもデジタル信号に変換された後、RAMに保持される。また、RAMには、被駆動部材50の目標の位置やこの位置に対応して設定された直流モータの目標速度(PWM制御のduty比)等も格納されている。なお、書き換え(重ね書き)可能な不揮発性のメモリとして、EEPROMやFRAM(登録商標)(Ferroelectric Random Access Memory)などを採用すればよい。以下の説明では、このようなメモリを、単にEEPROMとして記載する。このEEPROM333には、A相、B相信号及び多回転・アブソリュート位置信号等が、逐次、記録・保持される。
一般に、アブソリュート位置信号のデータ等、すなわち、インクリメンタルなA相・B相信号のデータ、位置決め信号S、及び、ホール素子の位相のデータは、一旦、RAMに保持され、アドレスと共に、EEPROMのアプリケーションプログラムやドライバーによりEEPROMへの書き込み(保存)がなされる。また、EEPROMからRAMへのこれらのデータ等の読み込みも、このアプリケーションプログラムやドライバーにより、アドレスを用いて処理される。
直流モータの制御ユニット300は、例えば、必要な複数の機能を論理回路の形で一つのチップにまとめた専用のASIC(Application Specific Integrated Circuit)として、あるいは、汎用のシングルチップマイコンを用いたIC回路のチップとして実現される。あるいはまた、ホストコンピュータの機能の一部として実現される。以下では、汎用のシングルチップマイコンを用いた具体的な構成例について説明するが、同じ機能を有する直流モータの制御装置を、専用のASICで実現しても良いことは言うまでもない。
制御ユニット300は、電源スイッチ43を介してバッテリ42と接続されており、上位のコンピュータ、例えば車載のECU(Electric Control Unit)500等からの外部指令や、MRセンサ22の出力であるA相、B相信号のデジタル値等の入力情報に基づき、直流モータを駆動して被駆動部材50、例えばワイパアーム、の動作形態を切り替える。すなわち、直流モータの制御ユニット300において、A相、B相信号等を基に、絶対原点位置信号やZ相信号が生成され、さらに、多回転・アブソリュート位置信号が生成される。制御ユニット300の情報の一部は、ECU500へも送信される。
制御ユニット300は、メモリ330に記憶された指令値や回転センサユニット20からの各種の信号に基づいて、ワイパアームを駆動する直流モータの回動位置、ひいては、ワイパアームの回動位置を演算し、ワイパアームが払拭面の上下の反転位置を往復回動するように、直流モータの駆動を制御するPWM信号の情報を生成する。これらの信号に基づくDCモータ駆動用PWM信号の情報が、直流モータの制御ユニット300から、DCモータ駆動制御部41へシリアル通信ラインを介して出力される。なお、直流モータを駆動するための駆動信号として、PWM信号以外の信号を用いても良いことは言うまでもない。
なお、被駆動部材50は、制御ユニット300による開ループ制御の対象であっても良く、閉ループ制御の対象であっても良い。閉ループ制御の場合には、被駆動部材50の回転位置や移動量等がセンサで検知され、その情報(A)は制御ユニット300にフィードバックされ、制御ユニット300により直流モータのサーボ制御が実行される。
直流モータの制御ユニット300は、例えば、DCモータ駆動制御部41やDCモータ駆動回路40と共に1枚のプリント基板600の上に実装し、エンドブラケット(若しくはシールドキャップ)18の内側面でかつ、回転センサユニット20に近接した位置に固定することもできる。この場合、DCモータ駆動回路40は、給電端子15とブラシ16との間の電源ラインに接続される。また、直流モータが設置される環境によっては、直流モータの外部にプリント基板600を設置しても良い。なお、ブラシホルダー内等に、EMC規格対応のノイズ防止回路が設置される場合、このノイズ防止回路よりもバッテリ側において、回転センサユニットのプリント基板やプリント基板600がバッテリに接続されるのが望ましい。また、図面上、回転センサユニット20やプリント基板600等の電源ラインは省略されている。
図1に機能ブロックの形で示した、通信制御部310、メモリ制御部320、自己イニシャライズ設定部340、回転センサ出力処理部341、Z相信号生成部342、Z相の幅信号生成部343、絶対原点位置信号生成部344、DCサーボ制御部345、PWM信号生成部346、位相同期処理部347、及び、センサエラー判定処理部348等のプログラムを実行することで実現される各機能は、一例として表示したものである。各機能の区分は任意であり、上記複数の機能を共通のプログラムで実現しても良く、或いは、特定の上記機能を異なる複数のプログラムやIC回路で実現しても良いことは言うまでもない。
次に、図1における、直流モータ100と回転センサユニット20の関係について、図2A~図2Cを参照しながら説明する。
図2Aは、直流モータの一部縦断面図であり、図2Bは、回転センサユニットにおける、基板等の構成例を示す図である。1対のMRセンサ22(22A,22B)、ホール素子27、及び、処理回路部23は、プリント基板19上に実装され、支持ピン81により、エンドブラケット18に固定されている。82はホール素子27の位置決め用のピンである。処理回路部23は、配線281、コネクタ82を介して通信ケーブル28に接続され、ホール素子27は、配線291、コネクタ292を介して通信ケーブル29に接続されている。
図2Aは、直流モータの一部縦断面図であり、図2Bは、回転センサユニットにおける、基板等の構成例を示す図である。1対のMRセンサ22(22A,22B)、ホール素子27、及び、処理回路部23は、プリント基板19上に実装され、支持ピン81により、エンドブラケット18に固定されている。82はホール素子27の位置決め用のピンである。処理回路部23は、配線281、コネクタ82を介して通信ケーブル28に接続され、ホール素子27は、配線291、コネクタ292を介して通信ケーブル29に接続されている。
なお、図2Aでは、分かりやすくするために、マグネット21、MRセンサ22及び処理回路部23含むICチップを大きく表示している。実際のサイズとして、一例をあげると、マグネットは直径が10mmである。プリント基板のサイズは35mm×35mmであり、この上に実装された5mm×6mmのICチップ内に、1mm×1mm若しくはそれ以下のサイズの薄膜構造のGMRセンサ22と、マイクロコンピュータ及びプログラムで構成される処理回路部23とが、半導体製造プロセスにより一体的に形成されている。このICチップの外側の円周上には3個のホール素子27が等間隔で配置されている。MRセンサ22は、角度検出センサひいては制御ユニット300の要となる部材である。ホール素子27の出力信号によるバックアップ制御機能は、自動車等に搭載され厳しい環境下で長期間使用されることを想定し、薄膜構造のセンサがその機能を破損された場合に備えて付設されているものである。
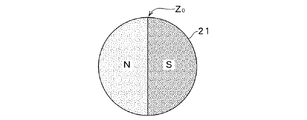
回転センサユニット20における、マグネット21の一例を、図2Cに示す。マグネットの絶対原点位置(Z0)は、N,S各1極着磁された平板状のマグネット21の、N極領域とS極領域の境界線上の一方の端の位置である。本発明において、この絶対原点位置(Z0)は、モータの駆動信号の零に同期する回転軸上の位置、例えば、駆動信号の零に同期するA相のパルスの立ち上がり時点に相当する、回転軸上の周方向上の特定の位置でもある。
1対のMRセンサ22としては、例えば、GMR、TMR、AMR等を用いることができる。
マグネット21は、Siもしくはガラス基板と、その上に形成されたNi,Fe等の強磁性金属を主成分とする合金の薄膜で構成されている。1対のMRセンサ22は、N極とS極の磁極の切替りによる磁界の抵抗の変化を検出するものである。MRセンサ22を構成する1対の磁気抵抗効果素子は、出力されるパルス信号の位相が互いに90度ずれるように、回転軸13の回転方向に、所定の間隔を空けて配置されている。1対の磁気抵抗効果素子は直列に接続され、その両端に電圧Vccが印加され、両素子の接続点の電位を表す電圧信号がMRセンサ22の出力となる。
1対のMRセンサ22としては、例えば、GMR、TMR、AMR等を用いることができる。
マグネット21は、Siもしくはガラス基板と、その上に形成されたNi,Fe等の強磁性金属を主成分とする合金の薄膜で構成されている。1対のMRセンサ22は、N極とS極の磁極の切替りによる磁界の抵抗の変化を検出するものである。MRセンサ22を構成する1対の磁気抵抗効果素子は、出力されるパルス信号の位相が互いに90度ずれるように、回転軸13の回転方向に、所定の間隔を空けて配置されている。1対の磁気抵抗効果素子は直列に接続され、その両端に電圧Vccが印加され、両素子の接続点の電位を表す電圧信号がMRセンサ22の出力となる。
本発明では、MRセンサ固有の横磁界を使用するため、マグネット21は多極着磁せずN,S、各1極着磁されたものである。直流モータの一方の軸受に平軸受24を採用すると、直流モータの正転・逆転の切り替えに伴い回転軸13が軸方向に、最大値で例えば0.2mm程度、移動する可能性がある。センサとして縦磁界を使用するホール素子を採用した場合、正転・逆転の切り替えに伴うこのような回転軸の移動があると、センサ出力の位相には変化がないものの、振幅に大きな影響がある。本発明では、回転軸13の一端面に面対向するMRセンサを配置し、かつ、このMRセンサ固有の横磁界を使用する。そのため、仮にマグネット21が固定された回転軸13が軸方向に若干移動したとしても、MRセンサ22の出力には影響がない。
次に、MRセンサの出力信号の処理方法の概念を図2D、図2Eを参照して説明する。
MRセンサ22は、作用する磁界の方向に対して電気抵抗値の変化する特性が異なるように設けられている。このため、マグネット21が角度Θだけ回転して各MRセンサに作用する磁界の向きが回転すると、それに対応してMRセンサの電気抵抗値、換言するとMRセンサ22の出力信号の電圧が変動する。回転軸13の1回転に対応して、SIN波、COS波の各々で360度、各々1周期分のパルス信号が出力される。
MRセンサ22は、作用する磁界の方向に対して電気抵抗値の変化する特性が異なるように設けられている。このため、マグネット21が角度Θだけ回転して各MRセンサに作用する磁界の向きが回転すると、それに対応してMRセンサの電気抵抗値、換言するとMRセンサ22の出力信号の電圧が変動する。回転軸13の1回転に対応して、SIN波、COS波の各々で360度、各々1周期分のパルス信号が出力される。
図2Eは、処理回路部23の構成の一例を示す図である。処理回路部23は、AD変換器231、軸ずれ補正処理部232、RAMなどのメモリ233、逆正接演算処理部234、パルスカウンタ235、インクリメンタルA相・B相信号生成部236、位置決め情報生成部237、パラレル・シリアル変換部238、及び、シリアル通信部239の各機能を有している。処理回路部23は、例えば、メモリ付きのマイクロコンピュータ上でプログラムを実行することにより実現される。
1対のMRセンサ22のアナログ信号は、処理回路部23において、量子化され電気角の内挿処理により多分割された、A相、B相のデジタル信号に変換され、各々パルスカウンタ235で累積加算され、この累積加算値がインクリメンタルなA相・B相各信号のパルスのデータとして、通信ケーブル28を介して直流モータの制御ユニット300へ送信され、回転センサ出力処理部341を経てメモリ330に保持される。
すなわち、処理回路部23では、1対のMRセンサ22A、22Bのアナログ信号の出力を、AD変換器231でデジタル信号に変換し、逆正接演算処理部234で逆正接演算し、パルスカウンタ235で加算し、その累積加算値が、インクリメンタルA相・B相信号生成部236で、インクリメンタルなA相信号及びB相信号(以下、A相・B相信号)として生成され、メモリ233に保持される。
また、位置決め情報生成部237は、MRセンサ22A、22Bのアナログ信号を基に、図2Dの右図に示した、逆正接演算の結果の特定の角度Θに相当する情報を、MRセンサの絶対原点の位置を決定するための「位置決め情報(Sn)」として生成し、メモリ233に保持する。例えば、回転軸の回転角度0に相当する、図2Dの右図の横軸、横軸の両角度が0度、換言すると、A相信号の0度に対応する立ち上がり時点に相当する、SIN,COS波形の0-0ポイントを、位置決め情報(Sn)とする。この場合、位置決め情報(Sn)は、回転軸13の1回転毎に1つだけ生成される。
なお、位置決め情報(Sn)を生成する回転角度Θは、任意の値で良い。すなわち、SIN波形の値とCOS波形の値が予め設定された特定の関係にある位置において、位置決め情報(Sn)を生成する。
また、位置決め情報(Sn)は、回転軸13の1回転毎に複数個、換言すると、SIN波形の値とCOS波形の値が予め設定された特定の関係にある複数の位置毎に、生成しても良い。あるいは、分解能の異なる異種の信号、例えば、1回転毎に1~2回程度の粗な信号と、1回転毎に数十回程度の密な信号とを組み合わせても良い。あるいはまた、A相信号とB相信号とを組み合わせて、異種の信号を生成しても良い。
本発明では、このような、A相、B相信号の値、換言するとSIN波形の値とCOS波形の値が予め設定された特定の大きさの関係にある位置を、「A相、B相の出力信号が特定の関係にある状態を示す位置」と定義する。
なお、位置決め情報(Sn)を生成する回転角度Θは、任意の値で良い。すなわち、SIN波形の値とCOS波形の値が予め設定された特定の関係にある位置において、位置決め情報(Sn)を生成する。
また、位置決め情報(Sn)は、回転軸13の1回転毎に複数個、換言すると、SIN波形の値とCOS波形の値が予め設定された特定の関係にある複数の位置毎に、生成しても良い。あるいは、分解能の異なる異種の信号、例えば、1回転毎に1~2回程度の粗な信号と、1回転毎に数十回程度の密な信号とを組み合わせても良い。あるいはまた、A相信号とB相信号とを組み合わせて、異種の信号を生成しても良い。
本発明では、このような、A相、B相信号の値、換言するとSIN波形の値とCOS波形の値が予め設定された特定の大きさの関係にある位置を、「A相、B相の出力信号が特定の関係にある状態を示す位置」と定義する。
なお、1対のMRセンサ22A、22Bから得られるA相、B相信号(さらには位置決め情報)は、各センサ等の制作誤差、設置誤差、温度の影響等により、誤差(主に軸ずれ誤差)を含んでいる可能性がある。すなわち、逆正接演算の結果得られたA相・B相信号は、本来、回転軸13の回転角度Θに比例して直線上に位置すべきものである。しかし、軸ずれ等の誤差により、360度毎に、あるいは、1対のMRセンサの位相差90度毎に、繰り返されるひずみを含んでいる場合がある。軸ずれ補正処理部232では、回転軸13の少なくとも1回転分のデータに基づき、1対のMRセンサの回転中心を抽出し、回転角度Θに対するA相、B相信号等のひずみの有無を検知し、ひずみがある場合にはそれらの補正処理を行う。
さらに、パラレル伝送処理により生成されたA相・B相信号、及び、位置決め情報(Sn)は、パラレル・シリアル変換部238で、シリアル伝送通信の規格に適合したシリアル伝送用の送信データ(BUS信号)に変換され、このBUS信号がシリアル通信部239から1本の伝送路28を介して直流モータの制御ユニット300へ送信される。
なお、回転センサユニットのパルスカウンタ235としてアップダウンカウンタを採用し、パルスの累積加減算値に、回転軸13の正逆の回転方向の情報も付加したA相、B相信号を生成し、位置決め情報(Sn)と共に、直流モータの制御ユニット300へ送信するようにしても良い。本発明では、このようなアップダウンカウンタによる回転方向の情報付きのカウント情報も、累積加算値として扱うものとする。
次に、図2Fは、120度間隔で配置された3個のホール素子H1,H2,H3のアナログ出力信号、及び、回転センサ出力処理部341において、AD変換機やコンパレータ等を用いて処理されたデジタル波形の例を示す図である。
ホール素子のアナログ出力信号の振幅Haは、Sin波であり、次式のように表現される。
Ha=K×Sinθ
但し、Kは定数
そのため、Ha/KのアークSinをとれば、ロータ(回転軸)の回転角度θ(機械角)が求められる。ホール素子1個でも角度θを求めることは可能であるが、実用上は、位置の誤差、素子の特性のばらつき、環境温度等による変動があっても、高い精度の回転角度θを求められるように、3個以上のホール素子を採用する。
Ph1はホール素子H1の設置位置(基準位置)、Ph2はホール素子H2の設置位置(基準位置)、Ph3はホール素子H3の設置位置(基準位置)を示している。これらの基準位置は、各ホール素子の設置位置に相当するものであり、それらの回転角の位相は、温度などの影響を受けず、一定の位置にある。本発明では、少なくともいずれかの1つの回転角の基準位置、以下ではホール素子H1の基準位置Ph1Zとし、これを用いて、同期の有無を判定する。
なお、図2Fにおけるホール素子出力のデジタル波形は、分かりやすくするために、1回転360度のうちの60度毎に立ち上り若しくは立ち下る例を示している。回転センサ出力処理部341において、このデジタル波形をさらに時間分割等により補間して、例えば、3本のホール素子を用いて1回転当たり1200パルス、あるいは、6本のホール素子を用いて3600パルスのデジタル信号からなるインクリメンタルな回転角度の情報を生成する。ホール素子の出力に対する温度の影響を排除し、より高い精度にするために、温度補償処理の機能を追加しても良い。回転センサ出力処理部341は、この回転角度の情報にアドレスを付与し、ホール素子による回転角度の情報としてメモリ330に記録する。
ホール素子のアナログ出力信号の振幅Haは、Sin波であり、次式のように表現される。
Ha=K×Sinθ
但し、Kは定数
そのため、Ha/KのアークSinをとれば、ロータ(回転軸)の回転角度θ(機械角)が求められる。ホール素子1個でも角度θを求めることは可能であるが、実用上は、位置の誤差、素子の特性のばらつき、環境温度等による変動があっても、高い精度の回転角度θを求められるように、3個以上のホール素子を採用する。
Ph1はホール素子H1の設置位置(基準位置)、Ph2はホール素子H2の設置位置(基準位置)、Ph3はホール素子H3の設置位置(基準位置)を示している。これらの基準位置は、各ホール素子の設置位置に相当するものであり、それらの回転角の位相は、温度などの影響を受けず、一定の位置にある。本発明では、少なくともいずれかの1つの回転角の基準位置、以下ではホール素子H1の基準位置Ph1Zとし、これを用いて、同期の有無を判定する。
なお、図2Fにおけるホール素子出力のデジタル波形は、分かりやすくするために、1回転360度のうちの60度毎に立ち上り若しくは立ち下る例を示している。回転センサ出力処理部341において、このデジタル波形をさらに時間分割等により補間して、例えば、3本のホール素子を用いて1回転当たり1200パルス、あるいは、6本のホール素子を用いて3600パルスのデジタル信号からなるインクリメンタルな回転角度の情報を生成する。ホール素子の出力に対する温度の影響を排除し、より高い精度にするために、温度補償処理の機能を追加しても良い。回転センサ出力処理部341は、この回転角度の情報にアドレスを付与し、ホール素子による回転角度の情報としてメモリ330に記録する。
次に、図3Aは、本発明の第1の実施例における制御ユニットの起動時の処理を示すフローチャートである。まず、電源立ち上げ直後に、直流モータの制御ユニット300の自己イニシャライズ設定部340は、自己イニシャライズ(初期設定)処理により初期設定済か否かをチェックする(S301)。否の場合、自己イニシャライズ処理モードに移行する(S302)。
初期設定処理済の場合、次に、異常終了判定モードに移行する。このモードでは、EEPROMからRAMを経由して多回転のアブソリュート位置信号のデータを読み込み(S303)、さらに、ホール素子の回転角度の情報のデータを読み込み(S304)、これらのデータに基づき、前回の直流モータの運転の終了が、正常になされたか、異常状態で終了したのかを判定する(S305)。すなわち、前回の直流モータの運転の終了が正常終了であれば、EEPROMのデータは、直流モータの起動時の回転軸の絶対値0の位置、すなわち、後で詳細に述べる回転軸13の絶対原点位置Zαに対応している。一方、EEPROMのデータが絶対値0から離れていれば、異常終了であったと判定される。異常終了の場合、上位のECUにエラー情報を送信し(S306)、ECU側から、被駆動部材50の運転再開に向けた復帰処理や緊急モード運転の処理がなされる。MRセンサの故障に基づく緊急モード運転時には、センサエラー判定処理部348が、ホール素子によるアブソリュート位置信号の情報を用いたバックアップ制御機能を実行し、DCサーボ制御部345やPWM信号生成部346を動作させ、直流モータの回転を制御する。
異常がなければ、直流モータの制御ユニット300は、正規の運転処理モードに移行する(S307)。
初期設定処理済の場合、次に、異常終了判定モードに移行する。このモードでは、EEPROMからRAMを経由して多回転のアブソリュート位置信号のデータを読み込み(S303)、さらに、ホール素子の回転角度の情報のデータを読み込み(S304)、これらのデータに基づき、前回の直流モータの運転の終了が、正常になされたか、異常状態で終了したのかを判定する(S305)。すなわち、前回の直流モータの運転の終了が正常終了であれば、EEPROMのデータは、直流モータの起動時の回転軸の絶対値0の位置、すなわち、後で詳細に述べる回転軸13の絶対原点位置Zαに対応している。一方、EEPROMのデータが絶対値0から離れていれば、異常終了であったと判定される。異常終了の場合、上位のECUにエラー情報を送信し(S306)、ECU側から、被駆動部材50の運転再開に向けた復帰処理や緊急モード運転の処理がなされる。MRセンサの故障に基づく緊急モード運転時には、センサエラー判定処理部348が、ホール素子によるアブソリュート位置信号の情報を用いたバックアップ制御機能を実行し、DCサーボ制御部345やPWM信号生成部346を動作させ、直流モータの回転を制御する。
異常がなければ、直流モータの制御ユニット300は、正規の運転処理モードに移行する(S307)。
図3Bに、起動時の処理における、制御ユニット300の自己イニシャライズ処理(S302)の詳細を示す。自己イニシャライズ処理では、EEPROMデータの初期化を行い(S311)、初期設定のためのイニシャライズ駆動信号、例えばPWM信号(±N回転)を生成してDCサーボ制御部345へ出力し(S312)、PWM信号生成部346で駆動信号を生成し、PWM信号により直流モータを駆動する。
電源立ち上げ直後のA相、B相信号の取得(S313)は、直流モータを、PWM信号に基づき正逆双方向に回転させ、回転軸13上のマグネット21をMRセンサ22に対して相対運動させることによって行われる。
なお、イニシャライズ駆動信号は、直流モータのDCサーボ制御信号に代わるものである。対象の直流モータが本来閉ループ制御されるものであっても、まず、初期設定処理では、直流モータをオープン制御の状態で、イニシャライズ駆動信号により、直流モータを駆動する。
電源立ち上げ直後のA相、B相信号の取得(S313)は、直流モータを、PWM信号に基づき正逆双方向に回転させ、回転軸13上のマグネット21をMRセンサ22に対して相対運動させることによって行われる。
なお、イニシャライズ駆動信号は、直流モータのDCサーボ制御信号に代わるものである。対象の直流モータが本来閉ループ制御されるものであっても、まず、初期設定処理では、直流モータをオープン制御の状態で、イニシャライズ駆動信号により、直流モータを駆動する。
モータ駆動信号としてPWM信号で直流モータ100を正転、逆転双方向に駆動すると、回転センサユニット20から、指令値(モータ駆動信号)に対応するA相、B相信号、及び、位置決め情報(Sn)が得られる。
次に、直流モータやMRセンサの応答状態が正常であるのか、否かが判定される(S314)。すなわち、得られたA相、B相信号が、初期設定処理の指令値と比較され、その累積加算値が正常か否か、すなわち、A相、B相信号の累積加算値がPWM信号の指令値に対応し応答状態が正常であるかが判定される。対応関係に異常有りと判定された場合には、指令値とA相、B相の信号の累積加算値とが対応するように、別途、MRセンサの温度特性の補正等の出力補正の処理が行われる(S315)。なお、出力補正の処理(S315)を複数回実施しても正常状態にならない場合は、EEPROM自体に異常がある等の別の原因も考えられるので、その旨のエラー表示を行う。
次に、直流モータやMRセンサの応答状態が正常であるのか、否かが判定される(S314)。すなわち、得られたA相、B相信号が、初期設定処理の指令値と比較され、その累積加算値が正常か否か、すなわち、A相、B相信号の累積加算値がPWM信号の指令値に対応し応答状態が正常であるかが判定される。対応関係に異常有りと判定された場合には、指令値とA相、B相の信号の累積加算値とが対応するように、別途、MRセンサの温度特性の補正等の出力補正の処理が行われる(S315)。なお、出力補正の処理(S315)を複数回実施しても正常状態にならない場合は、EEPROM自体に異常がある等の別の原因も考えられるので、その旨のエラー表示を行う。
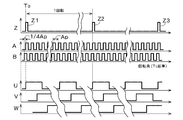
図4Aは、自己イニシャライズ処理時の、PWM信号とMRセンサの出力との関係、及び同期処理の概念を示している。図4Bは、PWM信号として正回転指令時、図4Cは、PWM信号として逆回転指令時の、MRセンサの出力信号(A相、B相)を示す図である。位相のずれ方向は、回転軸13の回転方向に応じて反転する。
ここでは、位置決め情報(Sn)は、正回転指令時のA相信号の0度に対応する立ち上がり時点に相当する、SIN,COS波形の0-0ポイントで生成されるものとする。この場合、直流モータが正回転の状態で回転軸が原点位置を通過する必要がある。
そこで、図4Aの中段に示すように、直流モータを起動し、イニシャライズ駆動信号(PWM信号)により、-2.5回転から+3.5回転まで正回転させる。これに伴い、図4Aの最上段に示すように、直流モータが、正回転しながら-2、-1、0、+1、+2、+3の各回転を超える時点で、各々、逆正接演算の結果が0-0ポイントとなる。すなわち、上記各時点で、A相信号の0度に対応するデジタル値の立ち上がりが得られる。このようにして、各時点に対応する位置決め情報(S1)~(S6)が出力される。
ここでは、位置決め情報(Sn)は、正回転指令時のA相信号の0度に対応する立ち上がり時点に相当する、SIN,COS波形の0-0ポイントで生成されるものとする。この場合、直流モータが正回転の状態で回転軸が原点位置を通過する必要がある。
そこで、図4Aの中段に示すように、直流モータを起動し、イニシャライズ駆動信号(PWM信号)により、-2.5回転から+3.5回転まで正回転させる。これに伴い、図4Aの最上段に示すように、直流モータが、正回転しながら-2、-1、0、+1、+2、+3の各回転を超える時点で、各々、逆正接演算の結果が0-0ポイントとなる。すなわち、上記各時点で、A相信号の0度に対応するデジタル値の立ち上がりが得られる。このようにして、各時点に対応する位置決め情報(S1)~(S6)が出力される。
図3Bに戻り、MRセンサが正常と判定された場合、もしくは補正処理がなされた場合、自己イニシャライズ処理は、次に、回転センサユニット20から取得した情報のアブソリュート化を行う(S316)。すなわち、EEPROMへの記録のために、A相、B相信号の各データに書き込み用のアドレスの付与(番地付け)を行う。このように、アブソリュート化のために、回転センサユニットの時系列の出力値であるA相・B相の各信号に、その累積加算値に対応するEEPROMのアドレスを付与して、アブソリュート信号とする。また、モータ駆動信号の0値に同期する位置決め情報(S4)の時点を、暫定的な原点位置(Zβ)とする。暫定的な原点位置(Zβ)は、MRセンサの出力にのみ基づいて成されているため、MRセンサの絶対的な原点の位置(絶対位置Zo)と正確に対応しているかは明確ではない。回転軸13に対してある程度の精度の角度情報を与えるのに適した、暫定的なアブソリュート信号と言える。
そして、この暫定的な原点位置(Zβ)と対応付けられた暫定的なアブソリュート信号のデータを、RAMを経由してEEPROMに記録する(S317)。これらのA相、B相信号の累積加算値のデータと暫定的なアブソリュート信号のデータに、アドレスを付与してEEPROMへ記録することにより、例えば、表1に示すような、簡易アブソリュート値のテーブルを、作成することができる。

次に、MRセンサ22の回転軸13に対する絶対的原点位置(Absolute)に相当する、絶対原点位置Zαの抽出を行う、絶対原点位置の抽出モード(S318)に移行する。MRセンサの絶対的原点位置(Zo)は、回転軸13上のマグネット21の特定の位置に対して、MRセンサ22Aの出力がゼロの状態を指す。本実施例では、絶対的原点位置(Zo)を直接検出するのに代えて、間接的に、この絶対的原点位置に相当する絶対原点位置Zαを抽出する。
絶対原点位置抽出モード(S318)では、上記定義に基づき、図4Aに示したように、MRセンサのA相、B相信号の逆正接演算の結果から得られる位置決め情報(S1)~(S6)の中で、PWM信号のONデューティが零に同期、図の例では、位置決め情報(S4)の位置を、A相のパルスの立ち上がり時点に同期する、MRセンサの絶対原点位置(Zα)とする。このようにして、絶対位置(Absolute)に対して、かなり高い精度の絶対原点位置を決定できる。
また、イニシャライズ駆動信号の指令値(PWM信号)の送信タイミングと、A相、B相信号、及び位置決め情報の受信タイミング等の時間情報を利用することで、より精度の高い絶対原点位置Zαの決定を行うことができる。
このように、イニシャライズ駆動信号に対応する高分解能のA相、B相信号及び位置決め情報を基にして、高精度の「MRセンサの絶対原点位置(Zα)」のデータが得られる。
絶対原点位置抽出モード(S318)では、上記定義に基づき、図4Aに示したように、MRセンサのA相、B相信号の逆正接演算の結果から得られる位置決め情報(S1)~(S6)の中で、PWM信号のONデューティが零に同期、図の例では、位置決め情報(S4)の位置を、A相のパルスの立ち上がり時点に同期する、MRセンサの絶対原点位置(Zα)とする。このようにして、絶対位置(Absolute)に対して、かなり高い精度の絶対原点位置を決定できる。
また、イニシャライズ駆動信号の指令値(PWM信号)の送信タイミングと、A相、B相信号、及び位置決め情報の受信タイミング等の時間情報を利用することで、より精度の高い絶対原点位置Zαの決定を行うことができる。
このように、イニシャライズ駆動信号に対応する高分解能のA相、B相信号及び位置決め情報を基にして、高精度の「MRセンサの絶対原点位置(Zα)」のデータが得られる。
次に、絶対原点位置Zαとホール素子の出力(回転角度の情報)との位相の同期処理に必要な同期づけの処理を行う(S319)。すなわち、位相同期処理部347において、メモリ330に記録されたデータに基づき、図4Aの最下段に示すように、回転軸13の絶対原点位置Zαとホール素子H1の基準位置Ph1Zの位相差(機械角)の差であるΔθ0を算出し、これに相当するデジタル値を、同期判定処理の判定のための同期情報として、メモリ330に記録する。
なお、GMRとホール素子の分解能には大きな差がある。しかし、ホール素子H1(若しくはH2、H3)基準位置Ph1Zの位相の最初の立ち上がり時点は、温度などによる影響を受け難くほぼ一定の位置にある。そこで、この基準位置Ph1Zに対応する最初のパルスの立ち上がり時点と回転軸13の絶対原点位置Zαとを、同期づけることで、分解能が劣るホール素子の出力を利用しながら、比較的精度の高い同期関係及び位相情報を得ることができる。回転センサ出力処理部341において、この回転角度の情報と、1回転毎のホール素子H1の基準位置Ph1Zとを関連付け、ホール素子による回転角度の情報を1回転又は多回転のアブソリュート位置信号としてメモリ330に記録する。回転軸13の絶対原点位置Zαと3個のホール素子の基準位置Ph1Z~Ph3Zの各位相の最初の立ち上がり時点とを関連付け、ホール素子出力に基づくアブソリュート位置信号の精度を高めるようにしても良い。ホール素子出力に基づくアブソリュート位置信号は、バックアップ制御機能に基づく運転時に使用される。
なお、GMRとホール素子の分解能には大きな差がある。しかし、ホール素子H1(若しくはH2、H3)基準位置Ph1Zの位相の最初の立ち上がり時点は、温度などによる影響を受け難くほぼ一定の位置にある。そこで、この基準位置Ph1Zに対応する最初のパルスの立ち上がり時点と回転軸13の絶対原点位置Zαとを、同期づけることで、分解能が劣るホール素子の出力を利用しながら、比較的精度の高い同期関係及び位相情報を得ることができる。回転センサ出力処理部341において、この回転角度の情報と、1回転毎のホール素子H1の基準位置Ph1Zとを関連付け、ホール素子による回転角度の情報を1回転又は多回転のアブソリュート位置信号としてメモリ330に記録する。回転軸13の絶対原点位置Zαと3個のホール素子の基準位置Ph1Z~Ph3Zの各位相の最初の立ち上がり時点とを関連付け、ホール素子出力に基づくアブソリュート位置信号の精度を高めるようにしても良い。ホール素子出力に基づくアブソリュート位置信号は、バックアップ制御機能に基づく運転時に使用される。
次に、Z相信号生成部342は、Z相信号及びZ層の幅を設定する(S320)。まず、Z相信号を設定する。ここでは、前のステップで得られた絶対原点の位置Zαを基に、インクリメンタルなA相・B相信号に対してZ層信号を設定する。すなわち、A相・B相信号の累積加算値に対して、360度間隔でA相のデジタル出力の各立ち上りに同期する、Z相信号(Z0,Z1,Z2,―,―,Zn)を設定する。例えば、Z0は回転軸13が1回転未満、Z1は回転軸13が1回転以上2回転未満であることを表わしている。なお、Z相信号は、B相のデジタル出力の各立ち上りに同期させても良い。
Z相信号が得られたA相・B相信号の累積加算値は、次に、回転軸13の1回転毎(360度毎)の累積加算値に変換され、これとZ相信号の組み合わせに、EEPROMのアドレスを付与して多回転アブソリュート信号のデータとなる。この多回転アブソリュート信号のデータは、テーブル形式で、EEPROMに記録される。このテーブルは、直流モータの制御情報として用いることができる。
次に、絶対原点の位置Zαを起点とするZ層の幅を確定する。
まず、図4Bに示すように、各Z相信号(Z0,Z1,Z2,―,―,Zn)の最初のA信号の立ち上がりに同期し、A信号の1/2周期の幅を有する「Z相の幅(1)」の信号を確定する。さらに、A信号の立ち上がりに同期し、A信号の1周期の幅を有する「Z相の幅(2)」の信号を確定する。「Z相の幅(1)」、「Z相の幅(2)」の信号は、各々、360度間隔で繰り返す信号である。
同様にして、図4Cに示すように、各Z相信号(Z0,Z1,Z2,―,―,Zn)の最初のB信号の立ち上がりに同期し、B信号の1/2周期の幅を有する「Z相の幅(3)」の信号を確定する。さらに、B信号の立ち上がりに同期し、B信号の1周期の幅を有する「Zの幅(4)」の信号を確定する。「Z相の幅(3)」、「Z相の幅(4)」も、各々、360度間隔で繰り返す信号である。なお、「Z相の幅」の周期や、「Z相の幅」の数は任意に設定できる。これらのA相、B相信号、Z相のデータに、EEPROMのアドレスを付与して、EEPROMに記録する。
まず、図4Bに示すように、各Z相信号(Z0,Z1,Z2,―,―,Zn)の最初のA信号の立ち上がりに同期し、A信号の1/2周期の幅を有する「Z相の幅(1)」の信号を確定する。さらに、A信号の立ち上がりに同期し、A信号の1周期の幅を有する「Z相の幅(2)」の信号を確定する。「Z相の幅(1)」、「Z相の幅(2)」の信号は、各々、360度間隔で繰り返す信号である。
同様にして、図4Cに示すように、各Z相信号(Z0,Z1,Z2,―,―,Zn)の最初のB信号の立ち上がりに同期し、B信号の1/2周期の幅を有する「Z相の幅(3)」の信号を確定する。さらに、B信号の立ち上がりに同期し、B信号の1周期の幅を有する「Zの幅(4)」の信号を確定する。「Z相の幅(3)」、「Z相の幅(4)」も、各々、360度間隔で繰り返す信号である。なお、「Z相の幅」の周期や、「Z相の幅」の数は任意に設定できる。これらのA相、B相信号、Z相のデータに、EEPROMのアドレスを付与して、EEPROMに記録する。
次に、回転センサユニットから得られた全てのA相、B相信号は、絶対原点の位置ZαやZ相信号、「Z相の幅」と関係づけられ、EEPROMのアドレスが付与され、回転軸13の絶対原点位置を表す、多回転・アブソリュート位置信号に変換される(S321)。
そして、自己イニシャライズ処理の結果としての、例えば表2のような、起動時のA相、B相、絶対原点位置(Zα)、Z相の位置、及び各Z相の幅の信号の全データを、RAMを経由してEEPROMに記録する。(S322)。さらに、判定用の位相差(機械角)Δθ0の情報も、EEPROMに記録する。

なお、自動車用のブラシ付き直流モータには、用途によっては、正逆両方向に1~2回転以内でしか駆動されないものもある。このような、回転範囲の狭い直流モータにおいては、自己イニシャライズ処理時に、より狭い角度範囲における絶対原点の位置Zαを正確に決定することが求められる。このような要求に応えるために、密、あるいは粗と密の位置決め情報の組み合わせに基づき、原点位置を決定することもできる。
図4Dは、粗と密な位置決め情報の組み合わせに基づく、自己イニシャライズ処理時の、絶対原点位置の決定の処理及び同期処理を説明するタイムチャートである。図4Dの例では、回転センサユニットの置決め情報生成部237から出力される位置決め情報として、回転軸の180度回転毎に1回の粗な位置決め情報と、回転軸の6度回転毎に1回の密な位置決め情報とが出力される。まず、粗な位置決め情報(-,S20,-,S45,-,)の中でPWM信号のオンデューティが零に同期する、この例では、位置決め情報(S40)の位置を、A相のパルスの立ち上がり時点に同期する、MRセンサの絶対原点位置(Zα)に仮決めする。次に、仮決め位置(S40)付近に関して、密な位置決め情報(-,S388,-,-,S418,-,)を採用し、その付近でPWM信号のオンデューティが零に同期する、この例では、位置決め情報(S406)の位置を、MRセンサの絶対原点位置(Zα)に正式決定する。このようにして、絶対位置(Absolute)に対して、±6度程度の誤差を含む可能性のある、かなり高い精度の絶対原点位置を決定できる。
さらに、図4Dの最下段に示すように、位置決め情報(S406)の位置に対するホール素子の基準位置との位相差(機械角)Δθ0を算出し、これに相当するデジタル値を、同期判定処理やバックアップ制御機能実行のための情報として、メモリ330に記録する。
さらに、図4Dの最下段に示すように、位置決め情報(S406)の位置に対するホール素子の基準位置との位相差(機械角)Δθ0を算出し、これに相当するデジタル値を、同期判定処理やバックアップ制御機能実行のための情報として、メモリ330に記録する。
図5は、正規の運転処理モードにおける、絶対原点位置の信号の生成処理及び同期処理の詳細を示すフローチャートである。
直流モータの制御ユニット300は、正規の運転処理モードにおいては、メモリのEEPROMからRAMを経由して表3に示したような絶対原点ZαやZ相信号(Z0,Z1,Z2,―,―,Zn)を取得し(S501)、Z相の幅の信号も取得する(S502)。さらに、回転センサユニットからのA相・B相信号を、RAMを経由して取得し(S503)、そのインクリメンタルな累積加算値を基に、EEPROMのアドレスを付与して、回転軸の1回転毎のA相・B相信号のアブソリュート化を行い、RAMに記録する(S504)。さらに、A相・B相信号と、Z相信号とから、直流モータの回転速度と回転角の情報を含む多回転のアブソリュート位置信号を生成し、表2に相当するテーブルを生成し、RAMに記録する(S505)。
直流モータの制御ユニット300は、正規の運転処理モードにおいては、メモリのEEPROMからRAMを経由して表3に示したような絶対原点ZαやZ相信号(Z0,Z1,Z2,―,―,Zn)を取得し(S501)、Z相の幅の信号も取得する(S502)。さらに、回転センサユニットからのA相・B相信号を、RAMを経由して取得し(S503)、そのインクリメンタルな累積加算値を基に、EEPROMのアドレスを付与して、回転軸の1回転毎のA相・B相信号のアブソリュート化を行い、RAMに記録する(S504)。さらに、A相・B相信号と、Z相信号とから、直流モータの回転速度と回転角の情報を含む多回転のアブソリュート位置信号を生成し、表2に相当するテーブルを生成し、RAMに記録する(S505)。
次に、位相同期処理部347により、絶対原点位置(Zα)とホール素子出力(回転角度)のとの同期付けを行う(S506)。すなわち、上記のようにして得られたMRセンサの絶対原点位置(Zα)と、ホール素子H1の基準位置Ph1Z(若しくは、ホール素子H2、H3の基準位置Ph2Z、Ph3Zのいずれか)との同期をとるための相互の位相関係の情報Δθ0を取得し、メモリに記録する。
制御ユニット300で生成されたこれらの情報は、逐次、RAM332を経由してEEPROM333に、例えば表2のようなテーブルとして、記録される(S507)。これを、運転処理モードが終了するまで繰り返して行い(S508)、運転終了に伴って終了する。
図6は、絶対原点位置(Zα)を基準とする信号の関係を説明する図である。この図では、特に、A相、B相信号及びZ位置の信号(Z0, Z1,-, Zn)の一例を示している。直流モータの回転軸の正回転、逆回転に応じて、モータの回転軸の1回転毎にZ位置の信号(Z0, Z1,-, Zn)がインクリメント、デクリメントされ、絶対原点位置(Zα)及びA相、B相信号を基にした回転軸の回転角度の情報も、インクリメント、デクリメントされる。
多回転のアブソリュート位置信号として、例えば、図6の下段の例では、1回転の位置P1に対応する、Z1-A相-20435が示されている。
多回転のアブソリュート位置信号として、例えば、図6の下段の例では、1回転の位置P1に対応する、Z1-A相-20435が示されている。
次に、正規の運転処理モードにおける、DCサーボ制御部345及びPWM信号生成部346の動作につい、図1及び図7A、図7Bを参照しながら、説明する。
DCサーボ制御部345は、EEPROMに表2のようなテーブルなどの形で記録されている、回転速度と回転角の信号、及び、多回転・アブソリュート位置信号に基づいて、直流モータ100の回転軸13の現在の回転角度、ひいては被駆動部材50の現在の絶対原点位置を認識する。DCサーボ制御部345は、これらの情報に基づいて、被駆動部材50の現在位置から目標位置までの速度指令値等を演算する。PWM信号生成部346は、DCサーボ制御部345の出力を受けて、直流モータ100の回転を制御するためのPWM信号を生成し、DCモータ駆動制御部41へ出力する。
DCサーボ制御部345は、EEPROMに表2のようなテーブルなどの形で記録されている、回転速度と回転角の信号、及び、多回転・アブソリュート位置信号に基づいて、直流モータ100の回転軸13の現在の回転角度、ひいては被駆動部材50の現在の絶対原点位置を認識する。DCサーボ制御部345は、これらの情報に基づいて、被駆動部材50の現在位置から目標位置までの速度指令値等を演算する。PWM信号生成部346は、DCサーボ制御部345の出力を受けて、直流モータ100の回転を制御するためのPWM信号を生成し、DCモータ駆動制御部41へ出力する。
図7Aは、正規の運転処理モードにおける、DCサーボ制御部345及びPWM信号生成部346の動作の詳細を示すフローチャートである。
DCサーボ制御部345は、まず、RAM等のメモリ330から、予め設定された直流モータの運転パターンに基づく、各目標の位置や目標速度を指令値として取得する(S601)。メモリには、被駆動部材であるワイパアームブレードの各目標位置に対応して設定された直流モータの運転パターンに対応する目標速度として、PID制御を前提としたモータ駆動信号、例えばPWM制御信号のデータが格納されている。各目標の位置を含む運転パターンの例として、例えば、ワイパモータは、ワイパアームブレードの反転位置から加速終了までは加速領域、加速終了からブレーキ開始までは定速領域、ブレーキ開始から反転位置までは減速領域となっている。直流モータは、このような所定の運転パターンに従ってPWM制御される。
DCサーボ制御部345は、まず、RAM等のメモリ330から、予め設定された直流モータの運転パターンに基づく、各目標の位置や目標速度を指令値として取得する(S601)。メモリには、被駆動部材であるワイパアームブレードの各目標位置に対応して設定された直流モータの運転パターンに対応する目標速度として、PID制御を前提としたモータ駆動信号、例えばPWM制御信号のデータが格納されている。各目標の位置を含む運転パターンの例として、例えば、ワイパモータは、ワイパアームブレードの反転位置から加速終了までは加速領域、加速終了からブレーキ開始までは定速領域、ブレーキ開始から反転位置までは減速領域となっている。直流モータは、このような所定の運転パターンに従ってPWM制御される。
速度(PWM)信号生成部346は、多回転のアブソリュート位置信号を取得し(S602)、指令値との差分値を算出する(S603)。また、センサエラー判定処理部348により、MRセンサ出力とホール素子出力との同期判定を行う(S604)。さらに、「ずれ」の有無を判定(S605)において、差分値が許容値を超えていれば「ずれ」有と判定する。また、同期判定では、回転センサユニット20の出力を基に得られた実際の位相差(機械角)Δθの情報と、予めEEPROMに記録されている判定用の位相差(機械角)Δθ0の情報とを比較し、MRセンサ出力とホール素子出力の値に差が無ければ同期しており、実質的な差異があれば、同期していないと判定する。これらの結果に基づいて、センサエラー判定処理部348は、それが2回目の判定である場合(S606、S607)、ずれを含むエラーが回転センサユニット20にあると判定し、ECU500に、異常情報を送信する(S608)。なお、回転センサユニット20ではなく、EEPROM自体に異常がある場合にも、この時点でチェックできる。
ずれの判定(S605)で「ずれ」がなかった場合は、PID制御に基づくPWM信号を生成し(S609)、DCモータ駆動制御部41へ出力する(S610)。そして、回転センサユニット20からのA相・B相信号に基づく多回転・アブソリュート位置信号を取得し(S611)、PWM信号と多回転・アブソリュート位置信号との差分ずれ量を算出し(S612)、さらに、センサエラー判定処理部348で、MRセンサ出力とホール素子出力との同期判定を行う(S613)。次に、PID制御におけるずれの有無の判定(S614)を行う。もし、2回連続して差分ずれ量が許容値を超えた場合や同期していない場合には(S615、S616)、直流モータの異常と判定し、ECU500に直流モータの異常情報を送信する(S617)。
ずれの判定(S605)で「ずれ」がなかった場合は、PID制御に基づくPWM信号を生成し(S609)、DCモータ駆動制御部41へ出力する(S610)。そして、回転センサユニット20からのA相・B相信号に基づく多回転・アブソリュート位置信号を取得し(S611)、PWM信号と多回転・アブソリュート位置信号との差分ずれ量を算出し(S612)、さらに、センサエラー判定処理部348で、MRセンサ出力とホール素子出力との同期判定を行う(S613)。次に、PID制御におけるずれの有無の判定(S614)を行う。もし、2回連続して差分ずれ量が許容値を超えた場合や同期していない場合には(S615、S616)、直流モータの異常と判定し、ECU500に直流モータの異常情報を送信する(S617)。
「ずれ」がなかった場合、運転終了の指令があるまで(S619)、新たなPWM信号を生成し(S609)、以下、同様の処理を繰り返す。
一方、2回連続して差分ずれ量が許容値を超えた場合や、同期していないと判定された場合には(S615、S616)、センサエラー判定処理部348において、回転センサユニットを含めた直流モータの異常と判定し、ECU500に直流モータの異常情報を送信し(S617)、回転センサユニット20の中の正常なセンサの出力による被駆動部材の応急的なサーボ制御、あるいは応急的な運転モードを実行し(S618)、その後、被駆動部材の運転を終了する(S619)。S608の後も、同様に、被駆動部材の運転を終了する(S619)。
回転センサユニット20の中でMRセンサ出力とホール素子のいずれのセンサが正常かは、例えば、メモリに記録されているセンサの過去の出力パルス数と今回の出力パルス数とを比較し、通常の運転では生じないような大きな変動がある場合に、そのセンサが異常であると判定できる。MRセンサ出力とホール素子の両センサ出力に異常がある場合には、安全を確保できる状態にして被駆動部材の運転を停止する。
一方、2回連続して差分ずれ量が許容値を超えた場合や、同期していないと判定された場合には(S615、S616)、センサエラー判定処理部348において、回転センサユニットを含めた直流モータの異常と判定し、ECU500に直流モータの異常情報を送信し(S617)、回転センサユニット20の中の正常なセンサの出力による被駆動部材の応急的なサーボ制御、あるいは応急的な運転モードを実行し(S618)、その後、被駆動部材の運転を終了する(S619)。S608の後も、同様に、被駆動部材の運転を終了する(S619)。
回転センサユニット20の中でMRセンサ出力とホール素子のいずれのセンサが正常かは、例えば、メモリに記録されているセンサの過去の出力パルス数と今回の出力パルス数とを比較し、通常の運転では生じないような大きな変動がある場合に、そのセンサが異常であると判定できる。MRセンサ出力とホール素子の両センサ出力に異常がある場合には、安全を確保できる状態にして被駆動部材の運転を停止する。
直流モータの回転速度は、PWM信号オン期間のデューティ比により任意に制御できる。例えば、駆動回路を構成するスイッチング素子(SW1-SW4)のオン・オフ期間の組み合わせやオン期間のデューティ比の制御により、直流モータを任意の速度で正回転回生制動、もしくは逆転回生制動させることもできる。
図7Bは、EEPROMのデータを用いた直流モータ一の制御の例を示すものである。ここでは、説明を簡単にするために、開ループ制御の例を示している。直流モータは、EEPROMの多回転・アブソリュート位置信号の情報、及びPID制御とPWM制御とを組み合わせた回転指令により、現在位置Pnから目標位置Pn+1まで、正確、かつ、迅速に駆動される。
図7Bは、EEPROMのデータを用いた直流モータ一の制御の例を示すものである。ここでは、説明を簡単にするために、開ループ制御の例を示している。直流モータは、EEPROMの多回転・アブソリュート位置信号の情報、及びPID制御とPWM制御とを組み合わせた回転指令により、現在位置Pnから目標位置Pn+1まで、正確、かつ、迅速に駆動される。
このようにして、直流モータの制御ユニット300は、回転センサユニット20からのA相・B相信号に基づいて、例えば、ワイパアームの動作状態を逐次認識しながら、直流モータの駆動を継続する。これにより、ワイパアームは所定の角度範囲で、運転パターンに基づく揺動払拭動作を行う。
本実施例において、被駆動部材としては、例えば、被駆動部材として、車載のワイパなどの例の他に、パワーシート、パワーウインド、電子ターボチャージャ、ウオーターポンプ、オイルポンプ等がある。さらに、自動車自体の駆動源として、あるいは、車以外の分野の、例えばロボット等、絶対原点の位置の情報に基づく多回転・アブソリュート信号を必要とする被駆動部材を駆動するDCサーボモータにも適用可能である。
本発明の一実施例によれば、MRセンサを含む回転センサの故障の有無を判定する手段として、安価なホール素子の出力信号を利用して比較的高い精度の位置情報を生成し、安価で信頼性の高い故障判定が可能な、直流モータの制御装置を提供できる。また、MRセンサが故障した場合のバックアップ制御を実行する際の位置情報として、ホール素子の出力信号を利用した比較的高精度の位置情報を生成できる、安価で信頼性の高い直流モータの制御装置を提供することができる。
回転センサユニットのGMRセンサとホール素子は、マグネットを共通に使用するため、構成は簡単であり、小型に構成できる。また、安価なホール素子を採用することで、信頼性が高いにも拘らず、小型かつ安価な回転センサユニットを提供することができる。
さらに、MRセンサが故障した場合でも、ホール素子の出力信号を利用して、比較的高精度にサーボ制御を継続できる直流モータの制御装置を提供することができる。
[実施例2]
回転センサユニットのGMRセンサとホール素子は、マグネットを共通に使用するため、構成は簡単であり、小型に構成できる。また、安価なホール素子を採用することで、信頼性が高いにも拘らず、小型かつ安価な回転センサユニットを提供することができる。
さらに、MRセンサが故障した場合でも、ホール素子の出力信号を利用して、比較的高精度にサーボ制御を継続できる直流モータの制御装置を提供することができる。
[実施例2]
次に、本発明の第2の実施例について説明する。この実施例は、本発明を、直流モータの回転軸の回転角度が±1~2回転以内の被駆動部材を駆動する装置に適用したものである。特に、被駆動部材を駆動する直流モータの回転軸の回転角度が360度未満の場合には、MRセンサの絶対原点の位置、A相、B相信号、及び、少なくとも3個のホール素子の出力信号を基に、回転軸の1回転内でのアブソリュート位置信号を生成し、EEPROMに記録し、この情報を利用して直流モータの駆動を行う。
本実施例によれば、被駆動部材の回転角度は、MRセンサの1回転のアブソリュート位置信号を用いて高精度に制御される。また、MRセンサを含む回転センサの故障の有無を判定する手段として、安価なホール素子の出力信号を利用して比較的高い精度の位置情報を生成し、安価で信頼性の高い故障判定が可能な、直流モータの制御装置を提供することにある。さらに、MRセンサが故障した場合でも、ホール素子の出力信号を利用して比較的高精度に制御を継続できる。
[実施例3]
本実施例によれば、被駆動部材の回転角度は、MRセンサの1回転のアブソリュート位置信号を用いて高精度に制御される。また、MRセンサを含む回転センサの故障の有無を判定する手段として、安価なホール素子の出力信号を利用して比較的高い精度の位置情報を生成し、安価で信頼性の高い故障判定が可能な、直流モータの制御装置を提供することにある。さらに、MRセンサが故障した場合でも、ホール素子の出力信号を利用して比較的高精度に制御を継続できる。
[実施例3]
次に、本発明を、ブラシレスDCモータに適用した第3の実施例を説明する。なお、以下では、主として、第1の実施例と相違する構成要素の説明を行い、第1の実施例と同じ機能を有するものについては、第1の実施例の説明を以て代える。
図8は、本発明の第3の実施例に基づく、ブラシレスDCサーボモータの制御装置の機能ブロック図である。ブラシレスDCサーボモータ100は、インナーロータ形の三相ブラシレスDCサーボモータ(以下、単にブラシレスDCサーボモータ)である。300は、ブラシレスDCサーボモータの制御ユニットである。
永久磁石タイプのロータが、回転軸13と一体に形成され、これらが、ブラシレスDCサーボモータのハウジングに設けられた軸受により、回転自在に保持されている。ブラシレスDCサーボモータ100の3相(U相、V相、W相)の各ステータコイルには、駆動トルクや速度指令等に応じて、電流制御部440で電流の制御された電力が、バッテリ42から電源スイッチ43、及び、インバータ400を介して給電端子48から供給される。インバータ駆動制御部410は、制御ユニット300からの指令に基づき、インバータ400を駆動して各ステータコイルに供給される電流の位相を制御し、ロータを回転させる。制御ユニット300は、電流検出/制限部450で検出された電流に基づき、電流検出/制限部450を介して、インバータ400に供給される最大の電力や電流を制御する。460は逆起電力検出部であり、後で詳細に述べるように、初期設定時にブラシレスDCサーボモータ100の各相のコイルの逆起電力(VBU、VBV、VBW)を検出し、制御ユニット300に伝送する。
図8は、本発明の第3の実施例に基づく、ブラシレスDCサーボモータの制御装置の機能ブロック図である。ブラシレスDCサーボモータ100は、インナーロータ形の三相ブラシレスDCサーボモータ(以下、単にブラシレスDCサーボモータ)である。300は、ブラシレスDCサーボモータの制御ユニットである。
永久磁石タイプのロータが、回転軸13と一体に形成され、これらが、ブラシレスDCサーボモータのハウジングに設けられた軸受により、回転自在に保持されている。ブラシレスDCサーボモータ100の3相(U相、V相、W相)の各ステータコイルには、駆動トルクや速度指令等に応じて、電流制御部440で電流の制御された電力が、バッテリ42から電源スイッチ43、及び、インバータ400を介して給電端子48から供給される。インバータ駆動制御部410は、制御ユニット300からの指令に基づき、インバータ400を駆動して各ステータコイルに供給される電流の位相を制御し、ロータを回転させる。制御ユニット300は、電流検出/制限部450で検出された電流に基づき、電流検出/制限部450を介して、インバータ400に供給される最大の電力や電流を制御する。460は逆起電力検出部であり、後で詳細に述べるように、初期設定時にブラシレスDCサーボモータ100の各相のコイルの逆起電力(VBU、VBV、VBW)を検出し、制御ユニット300に伝送する。
回転軸13の一端部には、この回転軸13の回転に伴うインクリメンタルな信号(A,B)を出力し、ロータリーエンコーダとして機能する回転センサユニット20が設けられている。回転センサユニット20は、回転軸13の一端面に固定されたマグネットと、このマグネットに対向する位置で離間してモータハウジングに固定された、1対のMRセンサ及び複数個のホール素子とを備えている。この回転センサユニット20は、通信ケーブル28、29を介して、制御ユニット300に接続されている。回転センサユニット20は、その回転位置決め情報生成部で、前記Snに相当するマグネット原点位置T0の信号を生成する。ブラシレスDCサーボモータ100の制御ユニット300は、例えば、インバータ400やインバータ駆動制御部410と共に1枚のプリント基板600の上に実装されている。
ブラシレスDCサーボモータの制御ユニット300は、通信制御部310、メモリ制御部320、初期設定駆動信号(iu,iv,iw)生成部3400、回転センサ出力処理部3405、各相信号の立ち上り位相Snの抽出部3410、各相の幅設定部3420、各相の立ち上がりと絶対原点位置の同期設定部3430、回転センサユニットのマグネット固定位置(絶対原点位置Z0)設定部3440、多回転・アブソリュート信号生成部3450、通常運転モードモータ制御信号(iu,iv,iw)生成部3460、通常運転モードDCサーボ制御部3470、インバータ駆動信号生成部3480、位相同期処理部3500、センサエラー判定処理部3510等の機能を有している。回転センサ出力処理部3405は、第1の実施例と同様に、回転センサユニット20の出力(A,B,T0)に、アドレスを付与し、ホール素子による回転角度の情報と共に、メモリ330に記録する。位相同期処理部3500は、絶対原点位置Z0と、ホール素子H1の基準位置Ph1(若しくは、ホール素子H2、H3の基準位置Ph2、Ph3を含む)との同期をとるための相互の位相関係の情報を生成する。位相同期処理部3500及びセンサエラー判定処理部3510も、第1の実施例と同様な機能を有する。
なお、制御ユニット300は、公知のブラシレスDCサーボモータと同様の、電流制御部440に対する電流の指令値を生成する機能も備えているが、この点は本発明の特徴ではないので、以下、その構成の説明を省略する。
なお、制御ユニット300は、公知のブラシレスDCサーボモータと同様の、電流制御部440に対する電流の指令値を生成する機能も備えているが、この点は本発明の特徴ではないので、以下、その構成の説明を省略する。
制御ユニット300は、電源スイッチ43を介してバッテリ42と接続されており、上位のコンピュータ、例えば車載のECU(Electric Control Unit)500等からの外部指令や、MRセンサ22の出力であるA相、B相信号のデジタル値等の入力情報に基づき、制御信号を生成し、ブラシレスDCサーボモ制御ユニット300において、回転センサユニット20の出力であるA相、B相信号及びT0信号に基づき、Z相信号、U、V、W相信号の多回転・アブソリュート信号が生成される。制御ユニット300の情報の一部は、ECU500へも送信される。
また、制御ユニット300は、通信ネットワークを介して、ブラシレスDCサーボモータを製造する工場内の端末装置700とも相互に通信可能に構成されている。この端末装置700は、通信ネットワークを介して、他の情報処理装置、例えば、工場の生産ラインにおけるコンピュータやサーバとも相互に通信可能に構成されている。ブラシレスDCサーボモータの初期設定は、原則として、この端末装置700により制御ユニット300の初期設定用プログラムを起動して実行される。工場の生産ライン以外の場面で、ブラシレスDCサーボモータの初期設定を行うことも可能である。
制御ユニット300は、メモリ330に記憶された指令値や回転センサユニット20からの各種の信号に基づいて、被駆動部材15を駆動するブラシレスDCサーボモータの回動位置、ひいては、被駆動部材50の回動位置を演算し、被駆動部材50が所定の各位置で動作するように、ブラシレスDCサーボモータのU相、V相、W相の各コイルへ電流を供給するインバータ駆動信号の情報を生成する。これらの信号に基づくDCサーボモータ駆動用インバータ駆動信号の情報が、ブラシレスDCサーボモータの制御ユニット300から、インバータ駆動制御部410へシリアル通信ラインを介して出力される。
通常運転モードにおいて、制御ユニット300では、ロータリーエンコーダ(回転センサユニット20)の情報に基づいて、ブラシレスDCサーボモータ100のサーボ制御を実行する。被駆動部材50は、制御ユニット300によるサーボ制御の対象である。また、被駆動部材50の回転数、回転位置、移動量等が被駆動部材に設けられた機器エンコーダで検知され、この機器エンコーダの情報(R)が制御ユニット300にフィードバックされ、サーボ制御の参考情報として利用される。
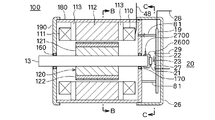
次に、第3の実施例に基づく、ブラシレスDCサーボモータの具体的な構成例について、説明する。図9Aは、第3の実施例に基づく、ブラシレスDCサーボモータの縦断面図であり、図9Bは、図9AのB-B断面図である。
ブラシレスDCサーボモータ100は、カップ状のモータハウジング180の内部に、3相のステータコア110が固定されている。ステータコア110は、周方向に等間隔に配置された9個の界磁鉄心112と、各界磁鉄心周りのスロット内に絶縁部材113を介して巻かれた界磁コイル111で構成されている。界磁鉄心112は、鋼板を軸方向に複数枚積層して構成されている。各界磁鉄心112に巻回された界磁コイル111は、インバータ40から印加される電圧の位相によって、U相、V相、W相の各相、すなわち、U相の界磁コイル(11U1~11U3)、V相の界磁コイル(11V1~11V3)、及び、W相の界磁コイル(11W1~11W3)に分類される。
ブラシレスDCサーボモータ100は、カップ状のモータハウジング180の内部に、3相のステータコア110が固定されている。ステータコア110は、周方向に等間隔に配置された9個の界磁鉄心112と、各界磁鉄心周りのスロット内に絶縁部材113を介して巻かれた界磁コイル111で構成されている。界磁鉄心112は、鋼板を軸方向に複数枚積層して構成されている。各界磁鉄心112に巻回された界磁コイル111は、インバータ40から印加される電圧の位相によって、U相、V相、W相の各相、すなわち、U相の界磁コイル(11U1~11U3)、V相の界磁コイル(11V1~11V3)、及び、W相の界磁コイル(11W1~11W3)に分類される。
一方、8極の永久磁石を有するロータ120が、回転軸13と一体に形成され、これらが、第1のエンドカバー190、及びモータハウジング180に設けられた1対の軸受160,170により、回転自在に保持されている。ロータ12は、回転軸13に固定されたロータヨーク121と、その外周部に固定された8個の永久磁石122を有する、8極のロータである。ロータヨーク121は、円板状の鋼板を軸方向に複数枚積層し、一体化したものである。ロータ120の外周面は、ステータコア110のティースに、空隙を介して対向している。
なお、ブラシレスDCサーボモータ100のスロット数やマグネットの極数、モータハウジング180やカバーなどの具体的構成は、実施例に限定されるものではない。例えば、カップ状のモータハウジング180の向きを左右逆にして、モータハウジングの右側の開口部に、軸受170の保持部や支柱が形成されたサイドカバーを固定し、さらに、その上に、第2のエンドカバー26を固定するようにしても良い。
なお、ブラシレスDCサーボモータ100のスロット数やマグネットの極数、モータハウジング180やカバーなどの具体的構成は、実施例に限定されるものではない。例えば、カップ状のモータハウジング180の向きを左右逆にして、モータハウジングの右側の開口部に、軸受170の保持部や支柱が形成されたサイドカバーを固定し、さらに、その上に、第2のエンドカバー26を固定するようにしても良い。
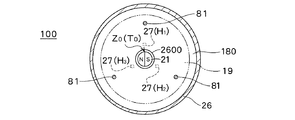
次に、図9A、図9Cに基づき、ブラシレスDCサーボモータと回転センサユニットの関係を説明する。図9Cは、図9AのC-C断面図である。
回転センサユニット20は、回転軸13の一端面に非磁性の固定部材2600を介して固定された平板状のマグネット21と、このマグネット21に対向する位置で離間して第2のエンドカバー26に固定された、1対のMRセンサ(磁気抵抗素子センサ)22と、処理回路部23、及び、3個のホール素子27とを備えている。MRセンサ22、処理回路部23、及び、ホール素子27は、プリント基板19上に実装されている。このプリント基板19は、支柱81により、MRセンサ22がマグネット21に対向し、MRセンサ22、ホール素子27及びマグネット21の各回転中心と回転軸13の軸芯とが一致するような関係で、サーボモータ100のハウジング180に固定されている。固定部材2600は、そのカップ状の中空部に回転軸13を挿入した状態で、回転軸13に対して円周方向に回動自在であり、固定ピン2700や接着剤により、固定部材2600が回転軸13に対して固定されている。図面上では、回転軸13のモータハウジング180の端からの突出長さを大きく表示しているが、実用上は、突出長さをできるだけ短く、例えば、3mm程度とするのが望ましい。
回転センサユニット20は、回転軸13の一端面に非磁性の固定部材2600を介して固定された平板状のマグネット21と、このマグネット21に対向する位置で離間して第2のエンドカバー26に固定された、1対のMRセンサ(磁気抵抗素子センサ)22と、処理回路部23、及び、3個のホール素子27とを備えている。MRセンサ22、処理回路部23、及び、ホール素子27は、プリント基板19上に実装されている。このプリント基板19は、支柱81により、MRセンサ22がマグネット21に対向し、MRセンサ22、ホール素子27及びマグネット21の各回転中心と回転軸13の軸芯とが一致するような関係で、サーボモータ100のハウジング180に固定されている。固定部材2600は、そのカップ状の中空部に回転軸13を挿入した状態で、回転軸13に対して円周方向に回動自在であり、固定ピン2700や接着剤により、固定部材2600が回転軸13に対して固定されている。図面上では、回転軸13のモータハウジング180の端からの突出長さを大きく表示しているが、実用上は、突出長さをできるだけ短く、例えば、3mm程度とするのが望ましい。
図9Cおいて、マグネット原点位置(T0)は、回転軸上の絶対原点位置(Z0)と一致すべきものである。
本発明では、ブラシレスDCサーボモータの製造工程の最終段階において、ブラシレスDCサーボモータの初期設定を行い、マグネット原点位置(T0)と絶対原点位置Z0とが一致するようして、マグネットを回転軸に固定する。そのために、モータのステータとロータとが組み立てられた段階で、駆動信号に対する回転軸上の絶対原点位置Z0を求める。具体的には、第2のエンドカバー26がモータハウジング180の右側面に固定されていない状態で、回転軸に対してマグネット21を仮固定し、ブラシレスDCサーボモータを駆動することにより、MRセンサの出力の位相と、U相の界磁コイルの逆起電力の積分値ピークの位相と、インバータ駆動信号の零に対応するU相コイルの立ち上がりの位相の情報とを取得する。これらの各位相の同期関係に基づいて、回転軸上の絶対原点位置Z0を求める。そして、次に、マグネット原点位置(T0)と絶対原点位置Z0の位相が一致するように、回転軸上のマグネット21の位置を決定し、回転軸にマグネット21を正式に固定する。
本発明では、ブラシレスDCサーボモータの製造工程の最終段階において、ブラシレスDCサーボモータの初期設定を行い、マグネット原点位置(T0)と絶対原点位置Z0とが一致するようして、マグネットを回転軸に固定する。そのために、モータのステータとロータとが組み立てられた段階で、駆動信号に対する回転軸上の絶対原点位置Z0を求める。具体的には、第2のエンドカバー26がモータハウジング180の右側面に固定されていない状態で、回転軸に対してマグネット21を仮固定し、ブラシレスDCサーボモータを駆動することにより、MRセンサの出力の位相と、U相の界磁コイルの逆起電力の積分値ピークの位相と、インバータ駆動信号の零に対応するU相コイルの立ち上がりの位相の情報とを取得する。これらの各位相の同期関係に基づいて、回転軸上の絶対原点位置Z0を求める。そして、次に、マグネット原点位置(T0)と絶対原点位置Z0の位相が一致するように、回転軸上のマグネット21の位置を決定し、回転軸にマグネット21を正式に固定する。
この初期設定の作業は、例えば、カメラ機能付きの作業ロボットのアーム等を用いて、あるいは、作業者自身によって処理される。この初期設定の作業のために、かつ、1対のMRセンサ22が所定の磁気感度を確保できるようにするために、モータハウジング180の右側面と1対のMRセンサ22との間の間隙は、所定の微小間隔、例えば20mm~30mmの間隙とするのが望ましい。初期設定の具体的な方法については、後で詳細に述べる。
図10は、第3の実施例における、ブラシレスDCサーボモータの駆動回路の構成例を示す図である。
ステータコア110において、各相の界磁コイル11U~11Wは、U1,U2,U3のコイルが直列に、V1,V2,V3のコイルが直列に、W1,W2,W3のコイルが直列に、各々結線されている。これらの3つのコイル群は、各々の一端が中性点で接続されている。
ステータコア110において、各相の界磁コイル11U~11Wは、U1,U2,U3のコイルが直列に、V1,V2,V3のコイルが直列に、W1,W2,W3のコイルが直列に、各々結線されている。これらの3つのコイル群は、各々の一端が中性点で接続されている。
インバータ400は、FETトランジスタから成る6つのスイッチング素子FET1~FET6と、1つの電解コンデンサ470、抵抗素子等で構成されている。各スイッチング素子FET1~FET6は、一端がブラシレスDCサーボモータ100の、U相、V相、W相のいずれかのコイル11U~11Wに接続され、他端が直流電源42に接続されている。各スイッチング素子FET1~FET6のゲート・ソース間に電圧、すなわち、インバータ駆動制御部410で生成されたインバータ駆動信号を加える。電解コンデンサ47は、電源電圧を平滑化するものである。
ブラシレスDCサーボモータの制御ユニット300は、通常運転モードにおいて、運転指令と、通常運転モードモータ制御信号(iu,iv,iw)を基に生成された制御信号と、回転センサユニット20からのA相・B相信号に基づいて、ブラシレスDCサーボモータ100の運転、例えば正弦波駆動を継続する。これにより、被駆動部材50は、所定の動作範囲で、所定の運転パターンに基づく動作を行う。
ブラシレスDCサーボモータの制御ユニット300は、モータハウジング180や第2のエンドカバー26の内側面でかつ、回転センサユニット20に近接した位置に固定することもできる。この場合、インバータ400は、界磁コイル111への給電端子48の近傍の電源ラインに接続される。また、ブラシレスDCサーボモータが設置される環境によっては、ブラシレスDCサーボモータの外部にプリント基板600を設置しても良い。
図8に機能ブロックの形で示した、通信制御部310、メモリ制御部320、初期設定駆動信号(iu,iv,iw)生成部3400、回転センサ出力処理部3405、各相信号の立ち上り位相Snの抽出部3410、各相の幅設定部3420、各相信号の立ち上がりと絶対原点位置の同期設定部3430、回転センサユニットのマグネット固定位置(絶対原点位置)設定部3440、多回転・アブソリュート信号生成部3450、通常運転モードモータ制御信号(iu,iv,iw)生成部3460、通常運転モードDCサーボ制御部3470、及びインバータ駆動信号生成部3480、位相同期処理部3500、センサエラー判定処理部3510等のプログラムを実行することで実現される各機能は、一例として表示したものである。各機能の区分は任意であり、上記複数の機能を共通のプログラムで実現しても良く、或いは、特定の上記機能を異なる複数のプログラムやIC回路で実現しても良いことは言うまでもない。また、ブラシレスDCサーボモータが自動車の各機器の駆動源として用いられる場合は、制御ユニット300の各機能は、車載のエンジン制御用のECUの中に組みこんでも良い。DCサーボモータ駆動制御部410や電流制御部440の機能も、車載のECU中に組みこんでも良い。
また、制御ユニット300の、初期設定に関係したプログラムの一部やメモリのデータは、工場内の端末装置700やサーバと共有され、初期設定の処理の一部を工場内の端末装置700で分担するように構成しても良い。
また、制御ユニット300の、初期設定に関係したプログラムの一部やメモリのデータは、工場内の端末装置700やサーバと共有され、初期設定の処理の一部を工場内の端末装置700で分担するように構成しても良い。
次に、第3の実施例における、自己イニシャライズ処理の概要を、図11のタイムチャートを参照しながら、説明する。
初期設定は、外部端末装置700から、コントロールユニット300の初期設定に関係したプログラムを起動し、必要なパラメータを設定することにより、開始される(1501)。
なお、この段階では、ブラシレスDCサーボモータ100の回転軸13に、マグネット21が任意の暫定位置(暫定のマグネット原点位置(T0))で仮固定されており(1503)、一対のMRセンサ22や処理回路23が、モータハウジング180の側面に固定され(1504)、かつ、第2のエンドカバー26はまだモータハウジング180の右側面に固定されていない。
初期設定は、外部端末装置700から、コントロールユニット300の初期設定に関係したプログラムを起動し、必要なパラメータを設定することにより、開始される(1501)。
なお、この段階では、ブラシレスDCサーボモータ100の回転軸13に、マグネット21が任意の暫定位置(暫定のマグネット原点位置(T0))で仮固定されており(1503)、一対のMRセンサ22や処理回路23が、モータハウジング180の側面に固定され(1504)、かつ、第2のエンドカバー26はまだモータハウジング180の右側面に固定されていない。
コントロールユニット300では、初期設定に関係したプログラムの起動に伴い、初期設定用の任意(所定)の駆動信号を生成し(1502)、DCサーボモータの3相のステータコイルに駆動電力を供給する(1505)。これに伴いロータ及びMRセンサ20のマグネット21が回転し(1506)、MRセンサ(検出素子22、処理回路23)で、A,Bの出力信号、及び、暫定のマグネット原点位置(T0)の情報が生成される(1507)。コントロールユニット300では、所定の駆動信号、例えば矩形波信号に基づく、暫定的なA,Bの信号のデータのテーブルを生成する(1508)。
そして、ステータコイルへの上記駆動電力の供給に伴う各相の逆起電力の検出を行い(1509)、逆起電力の積分値ピークPzを検出する(1510)。
一方、初期設定駆動信号(iu,iv,iw)に合わせて、テーブルとして記録されたMRセンサのA,Bの出力信号から、ロータ12の極数に合わせて、モータを正逆双方向に正負の回転数、例えば各々1回転させるのに必要な、電気角で120°の間隔で立ち上がるU相、V相、W相の各信号の位相情報を生成する。本実施例の場合、機械角45°毎(4500パルス毎)に、ロータ12が1回転するように、U相、V相、W相の各信号の位相情報のテーブルを生成する。
次に、暫定のマグネット原点位置(T0)と、A,Bの出力信号と、U相、V相、W相の各相信号の立ち上がり位相Snとを同期させ、位相情報のテーブルを、各相の暫定アブソリュートデータ(T0基準)として生成する(1511)。
さらに、前に求めた積分値ピークPzの位相に基づき、U相、V相、W相の各信号の立ち上がり位相Snを抽出する(1512)。
さらに、U相、V相、W相の各コイルに関する信号に対して、T0基準のZ相の幅を確定する。そして、各相の幅信号を付加した暫定アブソリュートデータのテーブルを生成する(1513)。このテーブルは、コントロールユニット300のEEPROMに記録される。
なお、この段階では、この暫定のマグネット原点位置(T0)が、MRセンサの絶対原点位置とどのような対応関係にあるかは明確ではない。
なお、この段階では、この暫定のマグネット原点位置(T0)が、MRセンサの絶対原点位置とどのような対応関係にあるかは明確ではない。
次に、各相の立ち上がりと絶対原点位置の同期設定部において、MRセンサの出力、前記積分値ピーク及び前記回転軸の回転角の情報の関係に基づいて、駆動信号に対する回転軸の絶対原点位置(Z0)を求める(1514)。
このようにして、初期設定駆動信号に対応するA相、B相信号及びU相の逆起電力の積分値の情報を基にした、「回転軸上の絶対原点位置(Z0)」のデータが得られる。
このようにして、初期設定駆動信号に対応するA相、B相信号及びU相の逆起電力の積分値の情報を基にした、「回転軸上の絶対原点位置(Z0)」のデータが得られる。
ここまでの一連の処理が完了したら、次に、コントロールユニット300から外部端末装置700へ、回転軸に対するマグネットの位置決めの要求を送る(1515)。
これを受けて、コントロールユニット300は、作業ロボットもしくは作業者に、「ロータを固定し、マグネットの仮固定を外し、マグネットを回転軸に対して回転させる」指令を送る(1516)。マグネット21の回転に伴いMRセンサ20からマグネット原点位置(T0)の情報が得られる(1517)。マグネット21のマグネット原点位置(T0)の情報がコントロールユニット300を経由して(1518)、外部端末装置700に送信される。作業ロボットや作業者などは、マグネット原点位置(T0)の情報を基に、マグネットを回転軸に対して絶対原点位置Z0に固定すべき位置(T0=Z0)を決定する(1519)。これに伴い、マグネットの回転軸に対する位置が絶対位置Z0に設定され(1520)、作業ロボットがマグネット21を回転軸に固定する(1521)。コントロールユニット300は、さらに、作業ロボットに、「ロータの固定を解除」する指令を送る(1522)。
その後、回転センサユニットから得られた全ての信号の位置データが絶対原点位置Z0基準に変更され、Z相信号、「Z相の幅」と関係づけられ、EEPROMのアドレスが付与される。このようにして、回転軸13の絶対原点位置を表す、多回転・アブソリュート信号に変換される。すなわち、各相信号の暫定アブソリュートデータ((T0)基準)を、Z0基準に補正したアブソリュートデータのテーブルとして生成し(1523)、EEPROMに記録する。
同様にして、各相の多回転アブソリュートデータを生成し、EEPROM333に記録する(1524)。これを受けて、初期設定は終了する(1525)。
次に、図12に、起動時の処理における、制御ユニット300の自己イニシャライズ処理の詳細を示す。自己イニシャライズ処理では、初期設定の処理を行う。
初期設定処理では、まず、MRセンサのマグネット21を、回転軸13に対し、暫定位置(T0)で仮固定する(S1610)。次に、EEPROMデータの初期化を行い(S1611)、初期設定駆動信号(iu,iv,iw)生成部3400で、初期設定のための初期設定駆動信号、例えばインバータ駆動用のPWM信号(±N回転)を生成する。初期設定駆動信号(iu,iv,iw)は、ブラシレスDCサーボモータを、零回転を挟んで正、逆方向に各々1~数回転だけ駆動する信号で足りる。この初期設定駆動信号を、インバータ駆動信号生成部3480へ出力し(S1612)、生成されたインバータ駆動信号(PWM信号)で、ブラシレスDCサーボモータ100を駆動する。
初期設定処理では、まず、MRセンサのマグネット21を、回転軸13に対し、暫定位置(T0)で仮固定する(S1610)。次に、EEPROMデータの初期化を行い(S1611)、初期設定駆動信号(iu,iv,iw)生成部3400で、初期設定のための初期設定駆動信号、例えばインバータ駆動用のPWM信号(±N回転)を生成する。初期設定駆動信号(iu,iv,iw)は、ブラシレスDCサーボモータを、零回転を挟んで正、逆方向に各々1~数回転だけ駆動する信号で足りる。この初期設定駆動信号を、インバータ駆動信号生成部3480へ出力し(S1612)、生成されたインバータ駆動信号(PWM信号)で、ブラシレスDCサーボモータ100を駆動する。
なお、この初期設定時の最初の駆動信号は、ブラシレスDCサーボモータのDCサーボ制御信号に代わるものである。対象のブラシレスDCサーボモータは本来閉ループ制御されるものであるが、初期設定処理では、ブラシレスDCサーボモータをオープン制御の状態で、初期設定駆動信号により、U相、V相、W相の各コイルへ電力を供給してブラシレスDCサーボモータを駆動する(S1613)。
得られたA相、B相信号は、初期設定処理の指令値と比較され、その累積加算値が正常か否か、すなわち、累積加算値がインバータ駆動信号の指令値に対応し、ブラシレスDCサーボモータやMRセンサの応答状態が正常であるのか、否かが判定される(S1614)。対応関係に異常有りと判定された場合には、指令値とA相、B相の信号の累積加算値とが対応するように、別途、MRセンサの温度特性の補正等の出力補正の処理が行われる(S1615)。
なお、出力補正の処理を複数回実施しても正常状態にならない場合は、EEPROM自体に異常がある等の別の原因も考えられるので、その旨のエラー表示を行う。
なお、出力補正の処理を複数回実施しても正常状態にならない場合は、EEPROM自体に異常がある等の別の原因も考えられるので、その旨のエラー表示を行う。
S1614でMRセンサが正常と判定された場合、もしくは補正処理がなされた場合、初期設定処理は、次に、回転センサユニット20から取得したA相、B相信号のアブソリュート化を行う(S1616)。すなわち、EEPROMへの記録のために、A相、B相信号の各データに書き込み用のアドレスの付与(番地付け)を行う。このようにして、暫定的なアブソリュート信号のデータを、RAMを経由してEEPROMに記録する。
次に、回転軸に対するマグネットの絶対位置を求め、絶対位置情報に基づくアブソリュート信号のデータを生成できるようにするための、一連の処理に移行する。
まず、最初の駆動信号に基づく、ステータコイルへの駆動電力の供給に伴う各相の逆起電力の検出を行い、逆起電力の積分値ピークPzを検出する(S1617)。
逆起電力検出部460は、各相のコイルの時系列の逆起電力Vbu、Vbv、Vbwを検出し、制御ユニット300へ伝送する。制御ユニット300では、各相信号の立ち上り位相Snの抽出部3410において、各相の逆起電力の積分演算を行い、積分値が所定の閾値を超えたピーク位置Pzを検出する。
まず、最初の駆動信号に基づく、ステータコイルへの駆動電力の供給に伴う各相の逆起電力の検出を行い、逆起電力の積分値ピークPzを検出する(S1617)。
逆起電力検出部460は、各相のコイルの時系列の逆起電力Vbu、Vbv、Vbwを検出し、制御ユニット300へ伝送する。制御ユニット300では、各相信号の立ち上り位相Snの抽出部3410において、各相の逆起電力の積分演算を行い、積分値が所定の閾値を超えたピーク位置Pzを検出する。
この逆起電力の検出について、図13、及び、図14を参照しながら説明する。
ステータの各界磁コイル11U,11V,11Wへ供給される電流の位相を回転させることにより、ロータ120が回転する。この各界磁コイルへ供給される電流の大きさとその方向に応じて、各界磁コイルに逆起電力Vbu、Vbv、Vbwが発生する。
ステータの各界磁コイル11U,11V,11Wへ供給される電流の位相を回転させることにより、ロータ120が回転する。この各界磁コイルへ供給される電流の大きさとその方向に応じて、各界磁コイルに逆起電力Vbu、Vbv、Vbwが発生する。
次に、回転センサユニットからのA相、B相の出力信号と、いずれか1相のステータコイルへの駆動信号との同期の関係から、回転軸に対するMRセンサの位置関係(マグネット原点位置(T0))の情報を取得する。
そのために、まず、ブラシレスDCサーボモータ100を正転、逆転の双方向に駆動する、例えば、正逆各1回転するための、U,V,W相の駆動信号を生成する(S1618)。すなわち、各相の立ち上がりと絶対原点位置の同期設定部3430において、初期設定駆動信号(iu,iv,iw)に合わせて、ロータ120の永久磁石の極数、本実施例では8極、に合わせた、マグネット原点位置(T0)基準の、U相、V相、W相の各信号の位相情報を生成する機能を有している。
図13は、各界磁コイル11U~11Wの逆起電力Vbu、Vbv、Vbw、その積分値ピーク、及び、位置決め情報(Sn)の関係を示す図である。
積分値ピークは、各積分値のピークが所定の閾値を超えた時点に対応しており、これを位置決め情報(Sn)として生成する。
ここで、特定の位相、例えば、U相の逆起電力の積分値ピークに着目すると、回転角度(電気角)が120°の範囲内で、40°及び100°の位置で、積分値ピークが得られている。すなわち、U相の界磁コイル(11U1~11U3)に関して、1回転(360°)当たり、6回の積分値ピークが得られる。同様に、V相の界磁コイル(11V1~11V3)、及び、W相の界磁コイル(11W1~11W3)に関しても、各々、1回転当たり、6回の積分値ピークが得られる。
この積分値ピークの位置は、ステータの各界磁コイルの構成に応じて変わることは言うまでもない。
なお、V相、W相に関しても、各々、位置決め情報(Sn)を、決定し、EEPROMに記録しても良い。また、位置決め情報(Sn)は、回転軸13の1回転毎に複数個、生成しても良い。あるいは、分解能の異なる異種の信号、例えば、1回転毎に1~2回程度の粗な信号と、1回転毎に数十回程度の密な信号とを組み合わせても良い。
積分値ピークは、各積分値のピークが所定の閾値を超えた時点に対応しており、これを位置決め情報(Sn)として生成する。
ここで、特定の位相、例えば、U相の逆起電力の積分値ピークに着目すると、回転角度(電気角)が120°の範囲内で、40°及び100°の位置で、積分値ピークが得られている。すなわち、U相の界磁コイル(11U1~11U3)に関して、1回転(360°)当たり、6回の積分値ピークが得られる。同様に、V相の界磁コイル(11V1~11V3)、及び、W相の界磁コイル(11W1~11W3)に関しても、各々、1回転当たり、6回の積分値ピークが得られる。
この積分値ピークの位置は、ステータの各界磁コイルの構成に応じて変わることは言うまでもない。
なお、V相、W相に関しても、各々、位置決め情報(Sn)を、決定し、EEPROMに記録しても良い。また、位置決め情報(Sn)は、回転軸13の1回転毎に複数個、生成しても良い。あるいは、分解能の異なる異種の信号、例えば、1回転毎に1~2回程度の粗な信号と、1回転毎に数十回程度の密な信号とを組み合わせても良い。
図14は、回転センサユニット20から出力されるA相、B相の信号と、これらの信号に基づいて生成される、Z相、U相、V相、W相の各信号の関係を示している。
なお、このS1618におけるU相、V相、W相の各信号の位相情報は、ロータリーエンコーダとして機能する回転センサユニット20からの、A相、B相の出力信号の位相と完全に同期している点で、S1612における初期設定駆動信号のU相、V相、W相の各信号とは異なるものである。
なお、このS1618におけるU相、V相、W相の各信号の位相情報は、ロータリーエンコーダとして機能する回転センサユニット20からの、A相、B相の出力信号の位相と完全に同期している点で、S1612における初期設定駆動信号のU相、V相、W相の各信号とは異なるものである。
各相信号の立ち上り位相Snの抽出部340では、図14に示したU相、V相、W相の各駆動信号の位相データにおける、各駆動信号の立ち上がり位置(Sn)を抽出する(S1619)。
図14の例では、最初のU相信号の立ち上がりと、最初のA相信号の立ち上がりが、マグネット原点位置(T0)に同期している。さらに、マグネット原点位置(T0)を基準として、回転軸13の1回転360°(機械角)毎に、Z相信号(Z1,Z2,―,―,Zn)が設定されている。
図14のマグネット原点位置(T0)に対応する最初のA相信号の立ち上がり位置、換言するとU相信号の立ち上がり位置から、U相コイルへの励磁電流が増加する。そのため、図13の例では、回転軸13の1回転に1つ、例えば、U相コイルへの励磁電流が増加方向にある、回転角度Θ=100°(電気角)の積分値ピークの位置が、MRセンサのマグネットの絶対原点位置を求めるための1つの「位置決め情報(Sn)」とし、EEPROMに記録される。
図14のマグネット原点位置(T0)に対応する最初のA相信号の立ち上がり位置、換言するとU相信号の立ち上がり位置から、U相コイルへの励磁電流が増加する。そのため、図13の例では、回転軸13の1回転に1つ、例えば、U相コイルへの励磁電流が増加方向にある、回転角度Θ=100°(電気角)の積分値ピークの位置が、MRセンサのマグネットの絶対原点位置を求めるための1つの「位置決め情報(Sn)」とし、EEPROMに記録される。
図12に戻り、次に、各相の幅設定部3420は、各相コイルの信号の幅を設定する(S1620)。
Z相信号が得られた、U相、V相、W相の各信号の、各A相・B相信号の累積加算値は、次に、回転軸13の1回転毎(360度毎)の累積加算値に変換され、これとZ相信号の組み合わせに、EEPROMのアドレスを付与して、表3に示したような、暫定多回転アブソリュート信号のデータとなる。

次に、各相の立ち上がりと絶対原点位置の同期設定部3430において、MRセンサの出力、前記積分値ピーク及び前記回転軸の回転角の情報の関係に基づいて、駆動信号に対する回転軸の絶対原点位置(Z0)を求める(図12のS1621)。
図15は、駆動信号に対する回転軸の絶対原点位置(Z0)を求める処理を説明するタイムチャートである。
図15は、駆動信号に対する回転軸の絶対原点位置(Z0)を求める処理を説明するタイムチャートである。
インバータ駆動信号を出力してブラシレスDCサーボモータ100を正・逆双方向に駆動すると、回転センサユニット20から、指令値(U,V,W相の駆動信号)に対応するA相、B相信号が得られる。また、前記した通り、逆起電力検出部460からのデータに基づき、各相信号の立ち上り位相Snの抽出部3410において、対応する複数のピーク位置、すなわち、複数の位置決め情報(Sn)が得られる。
回転軸上の絶対原点位置(Z0)に対応する位置決め情報(Sn)は、回転軸13の1回転に1つ出力されるべきである。さらに、この位置決め情報(Sn)は、U,V,Wのいずれか1相のコイルへの励磁電流が増加方向にある区間内の、A相信号の0度に対応する立ち上がり時点に相当する位置と定義する。この場合、ブラシレスDCサーボモータが正回転の状態で、回転軸がこの絶対原点位置(Z0)を通過する必要がある。
そこで、各相の立ち上がりと絶対原点位置の同期設定部3430において、図15の中段に示すように、ブラシレスDCサーボモータを起動し、初期設定駆動信号(インバータ駆動信号)により、間に零回転を含む範囲で、ブラシレスDCサーボモータを正回転もしくは逆回転させる。
ブラシレスDCサーボモータを、例えば、-1回転から+1回転まで正回転させた場合、-1回転から零回転を通過し+1回転まで回転する間に、図15の上段に示すように、U相コイルの逆起電力の積分値(ピーク値)が閾値に達する。このようにして、各信号の立ち上がり時点に対応する位置決め情報(S1)~(S6)が出力される。
そこで、各相の立ち上がりと絶対原点位置の同期設定部3430において、図15の中段に示すように、ブラシレスDCサーボモータを起動し、初期設定駆動信号(インバータ駆動信号)により、間に零回転を含む範囲で、ブラシレスDCサーボモータを正回転もしくは逆回転させる。
ブラシレスDCサーボモータを、例えば、-1回転から+1回転まで正回転させた場合、-1回転から零回転を通過し+1回転まで回転する間に、図15の上段に示すように、U相コイルの逆起電力の積分値(ピーク値)が閾値に達する。このようにして、各信号の立ち上がり時点に対応する位置決め情報(S1)~(S6)が出力される。
次に、これらU相の逆起電力の積分値(ピーク値)が閾値に達する位置決め情報(S1)~(S6)の位相の中で、上記定義に基づき、図15の中段に示したように、インバータ駆動信号のU相コイルのPWM信号のONデューティが零に同期する、位置決め情報(S4)の位相が、回転軸上の絶対原点位置(Z0)に同期していると判定する。
なお、U相コイルに代えて、V相若しくはW相のコイルへの励磁電流を基に、回転軸上の絶対原点位置(Z0)に同期する位置決め情報を出力するようにしても良い。また、回転軸上の絶対原点位置(Z0)の決定のために、初期設定駆動信号の指令値(PWM信号)の送信タイミングと、A相、B相信号、U相、V相、W相の信号、及び、位置決め情報の受信タイミング等の時間情報を利用しても良い。
なお、U相コイルに代えて、V相若しくはW相のコイルへの励磁電流を基に、回転軸上の絶対原点位置(Z0)に同期する位置決め情報を出力するようにしても良い。また、回転軸上の絶対原点位置(Z0)の決定のために、初期設定駆動信号の指令値(PWM信号)の送信タイミングと、A相、B相信号、U相、V相、W相の信号、及び、位置決め情報の受信タイミング等の時間情報を利用しても良い。
次に、同期処理として、絶対原点位置(Z0)とホール素子の出力(回転角度の情報)との位相の同期処理に必要な同期づけの処理を行う(S1622)。すなわち、位相同期処理部3500において、メモリ330に記録されたデータに基づき、図15の最下段に示すように、絶対原点位置(Z0)とホール素子H1の基準位置Ph1zとの位相差(機械角)の差であるΔθ0を算出し、これに相当するデジタル値を、同期判定処理の判定等のための同期情報として、メモリ330に記録する。
このように、初期設定駆動信号に対応する高分解能のA相、B相信号及びU相の逆起電力の積分値の情報を基にした、高精度の「回転軸上の絶対原点位置(Z0)」のデータ、及び、U相、V相、W相の各信号の位相情報のデータ、すなわち、絶対原点位置(Z0)を基準とした、回転数、U,V,W相の各コイルの位相情報、及び、同期をとるための相互の位相関係の情報を含んだ、アブソリュートの値のテーブルが生成される。
ここまでの一連の処理が完了したら、コントロールユニット300から外部端末装置700へ、マグネットの位置決めの要求を送り、これを受けて、コントロールユニット300は、回転センサユニットのマグネット固定位置設定部3440によるマグネットの位置決めの処理(S1623)に移行する。
このマグネットの位置決めの処理について、図16A~図16Bを参照しながら説明する。
このマグネットの位置決めの処理について、図16A~図16Bを参照しながら説明する。
図16Aに示したように、初期設定時、マグネット21は回転軸13に対して任意の角度位置(マグネット原点位置(T0))で仮固定されている。
次に、回転軸13を固定した状態で、回転軸13上でマグネット21を相対的に回転させると、図16Bに示したように、回転角度に対して、MRセンサ20の出力が、サイン波形で示されるように変化し、マグネット原点位置(T0)信号が出力される。
そこで、マグネット21を回転軸13に対して回転させ、MRセンサの出力(マグネット原点位置(T0)信号)が、先に求めた絶対原点位置(Z0)と一致する位置を求め、この位置でマグネット21を回転軸13に固定する。このようにして、マグネット21は回転軸13上の絶対原点位置(Z0)に固定される。すなわち、マグネット21は、このマグネットの原点位置(T0)が、回転軸13の絶対原点位置(Z0)と同期する位置に固定される。
なお、本実施例の方法によるマグネット21の位置決めは、MRセンサの分解能(36000パルス程度)に対して、厳密には若干の誤差を含む可能性が想定される。本発明のマグネット21の「絶対原点位置」はそのような微小の誤差を含んだものと定義する。マグネット21と回転軸との間で、この絶対原点位置(Z0)が一度設定されると、それは繰り返し誤差の発生しない不変の位置情報として出力される。そのため、サーボ制御を行うブラシレスモータの制御のための「絶対原点位置」の情報として、実用上、なんら支障はない。
そこで、マグネット21を回転軸13に対して回転させ、MRセンサの出力(マグネット原点位置(T0)信号)が、先に求めた絶対原点位置(Z0)と一致する位置を求め、この位置でマグネット21を回転軸13に固定する。このようにして、マグネット21は回転軸13上の絶対原点位置(Z0)に固定される。すなわち、マグネット21は、このマグネットの原点位置(T0)が、回転軸13の絶対原点位置(Z0)と同期する位置に固定される。
なお、本実施例の方法によるマグネット21の位置決めは、MRセンサの分解能(36000パルス程度)に対して、厳密には若干の誤差を含む可能性が想定される。本発明のマグネット21の「絶対原点位置」はそのような微小の誤差を含んだものと定義する。マグネット21と回転軸との間で、この絶対原点位置(Z0)が一度設定されると、それは繰り返し誤差の発生しない不変の位置情報として出力される。そのため、サーボ制御を行うブラシレスモータの制御のための「絶対原点位置」の情報として、実用上、なんら支障はない。
回転軸13に対するマグネット21の位置固定法の一例として、固定ピン2700や接着剤等で、固定部材2600を回転軸13に固定する。
これらの情報から、駆動信号と回転軸上のマグネットの角度の関係が求まり、マグネットを回転軸に対して相対的に回転させる。すなわち、各相の立ち上がり位置Snを絶対原点位置Z0で補正して、暫定多回転アブソリュート信号のデータを、絶対原点位置を基準とする多回転・アブソリュート信号のデータに変換する(S1624)。これにより、駆動信号とMRセンサの出力とを完全に同期させることが可能になる。
これらの情報から、駆動信号と回転軸上のマグネットの角度の関係が求まり、マグネットを回転軸に対して相対的に回転させる。すなわち、各相の立ち上がり位置Snを絶対原点位置Z0で補正して、暫定多回転アブソリュート信号のデータを、絶対原点位置を基準とする多回転・アブソリュート信号のデータに変換する(S1624)。これにより、駆動信号とMRセンサの出力とを完全に同期させることが可能になる。
次に、回転センサユニットから得られた全てのA相、B相信号は、各相信号の絶対位置Z0やZ相信号、「Z相の幅」と関係づけられ、EEPROMのアドレスが付与され、回転軸13の絶対原点位置を表す、多回転・アブソリュート信号に変換される(S1625)。すなわち、各相信号の暫定アブソリュートデータ(T0基準)を、Z0基準のデータに補正して、多回転のアブソリュートデータを生成する。このMRセンサのアブソリュートデータは、先に得られた位相差(機械角)の差Δθ0の情報を基に、ホール素子H1の基準位置Ph1zとも同期づけられている。
コントロールユニット300では、次に、Z0基準の多回転のアブソリュートデータを、EEPROM333に記録する(S1626)。
コントロールユニット300では、次に、Z0基準の多回転のアブソリュートデータを、EEPROM333に記録する(S1626)。
図17は、U相、V相、W相の各コイルに関して、EEPROMに記録される、A相、B相信号、Z相の位相に関するデータの一例を示す図である。
例えば、図17の各データは、Z0基準の、A相、B相信号、Z相及び、U相、V相、W相の各相コイルの回転数、回転角度若しくは位相のアブソリュート情報等を与えるテーブルとして、各コイルの電流制御に利用することができる。また、各「Z相の幅(1)」~「Z相の幅(4)」(図示略)は、インバータ駆動信号等、ブラシレスDCサーボモータの各種の制御信号等を生成するのに利用される。さらに、ホール素子H1の基準位置Ph1zは、同期判定等に使用される。
例えば、図17の各データは、Z0基準の、A相、B相信号、Z相及び、U相、V相、W相の各相コイルの回転数、回転角度若しくは位相のアブソリュート情報等を与えるテーブルとして、各コイルの電流制御に利用することができる。また、各「Z相の幅(1)」~「Z相の幅(4)」(図示略)は、インバータ駆動信号等、ブラシレスDCサーボモータの各種の制御信号等を生成するのに利用される。さらに、ホール素子H1の基準位置Ph1zは、同期判定等に使用される。
なお、被駆動部材の駆動源として、精度の高い制御を行うために、絶対原点位置Z0をより正確に決定することが求められることもある。このような要求に応えるために、図4Dに示したような方法で、密、あるいは粗と密の位置決め情報の組み合わせに基づき、原点位置を決定することもできる。
図18は、第3の実施例における、通常運転モード時の、制御ユニットの信号処理の詳細を示すフローチャートである。
ブラシレスDCサーボモータの制御ユニット300は、正規の運転処理モードにおいては、多回転・アブソリュート信号生成部3450、通常運転モードモータ制御信号(iu,iv,iw)生成部3460、通常運転モードDCサーボ制御部3470、インバータ駆動信号生成部3480等が動作し、外部指令、EEPROM333の情報や回転センサユニット20からの情報に基づき、ブラシレスDCサーボモータを、ロータリーエンコーダとして機能させる。
ブラシレスDCサーボモータの制御ユニット300は、正規の運転処理モードにおいては、多回転・アブソリュート信号生成部3450、通常運転モードモータ制御信号(iu,iv,iw)生成部3460、通常運転モードDCサーボ制御部3470、インバータ駆動信号生成部3480等が動作し、外部指令、EEPROM333の情報や回転センサユニット20からの情報に基づき、ブラシレスDCサーボモータを、ロータリーエンコーダとして機能させる。
すなわち、通常運転モードモータ制御信号(iu,iv,iw)生成部3460でU相、V相、W相の駆動信号を生成し(S1801)、EEPROM333等から駆動信号に対応するU相、V相、W相のパルス数を取得し(S1802)、さらに、Z相の幅の信号やZ相信号(Z1,Z2,―,―,Zn)の位相のデータを取得する(S1803、S1804)。さらに、U相の立ち上がりを絶対原点位置(Z0)に同期させる(S1805)。そして、回転センサユニット20からのA相・B相信号を、RAMを経由して取得し(S1806)、そのインクリメンタルな累積加算値を基に、EEPROMのアドレスを付与して、1回転毎のA相・B相信号、Z相信号、U、V、W相信号のアブソリュート化を行い、RAMに記録する(S1807)。そして、Z相信号とA相・B相信号とから、ブラシレスDCサーボモータの回転速度と回転角の情報を含む多回転のアブソリュート信号を生成する(S1808)。また、絶対原点位置(Z0)とホール素子出力との同期をとる(S1809)。これらのデータを、RAMを介してEEPROMに記録する(S1810)。
すなわち、ブラシレスDCサーボモータの回転軸の正回転、逆回転に応じて、モータの回転軸の1回転毎に、A、B、Z、U、V、Wの各信号、及び、ホール素子出力がインクリメント、デクリメントされ、これらの情報は、ブラシレスDCサーボモータの回転軸の現在位置を表す情報として、逐次、RAMを経由してEEPROMに記録される。
すなわち、ブラシレスDCサーボモータの回転軸の正回転、逆回転に応じて、モータの回転軸の1回転毎に、A、B、Z、U、V、Wの各信号、及び、ホール素子出力がインクリメント、デクリメントされ、これらの情報は、ブラシレスDCサーボモータの回転軸の現在位置を表す情報として、逐次、RAMを経由してEEPROMに記録される。
次に、通常運転モードにおける、DCサーボ制御部3470及びインバータ駆動信号生成部3480の動作につい、図8及び図19を参照しながら、説明する。
通常の運転モードにおいて、ブラシレスDCサーボモータ100が回転すると、ブラシレスDCサーボモータの制御ユニット300は、回転センサユニット20からのA相・B相信号に基づいてブラシレスDCサーボモータの回転速度・回転方向及び絶対原点位置を認識し、認識した回転速度と回転方向、及び絶対原点位置と、指令値とを比較して、U相、V相、W相の各コイルに対するインバータ駆動用の正弦波駆動信号を生成する。すなわち、ロータの回転角度に応じて連続的にステータのコイルの電圧を正弦波状に変化させてロータを回転させる。U相、V相、W相の各コイルには、120°(電気角)位相をずらした正弦波電圧の電力が入力される。さらに、モータの駆動回路としてのインバータに対して、PWM信号のデューティ比を制御して電圧を連続的に変化させる。
通常の運転モードにおいて、ブラシレスDCサーボモータ100が回転すると、ブラシレスDCサーボモータの制御ユニット300は、回転センサユニット20からのA相・B相信号に基づいてブラシレスDCサーボモータの回転速度・回転方向及び絶対原点位置を認識し、認識した回転速度と回転方向、及び絶対原点位置と、指令値とを比較して、U相、V相、W相の各コイルに対するインバータ駆動用の正弦波駆動信号を生成する。すなわち、ロータの回転角度に応じて連続的にステータのコイルの電圧を正弦波状に変化させてロータを回転させる。U相、V相、W相の各コイルには、120°(電気角)位相をずらした正弦波電圧の電力が入力される。さらに、モータの駆動回路としてのインバータに対して、PWM信号のデューティ比を制御して電圧を連続的に変化させる。
通常運転モードにおけるDCサーボ制御部3470は、EEPROMに図17のようなテーブルなどの形で記録されている、回転速度と回転角の信号、及び、多回転・アブソリュート信号に基づいて、ブラシレスDCサーボモータ100の回転軸13の現在の回転角度、ひいては被駆動部材50の現在の絶対位置を認識する。DCサーボ制御部3470は、これらの情報に基づいて、被駆動部材50の現在位置から目標位置までの速度指令値等を演算する。インバータ駆動信号生成部3480は、DCサーボ制御部3470の出力を受けて、ブラシレスDCサーボモータ100の回転を制御するためのインバータ駆動信号を生成し、インバータ駆動制御部410へ出力する。
図19は、通常運転モードにおける、DCサーボ制御部3470及びインバータ駆動信号生成部3480の動作の詳細を示すフローチャートである。
通常運転モードにおいて、DCサーボ制御部3470は、まず、RAM等のメモリ330から、予め設定されたブラシレスDCサーボモータの運転パターンに基づく、各目標の位置や目標速度を指令値として取得する(S1901)。メモリには、被駆動部材の各目標位置に対応して設定されたブラシレスDCサーボモータの運転パターンに対応する目標速度として、正弦波駆動やPID制御を前提としたモータ駆動信号、例えばPWM制御信号のデータが格納されている。各目標の位置を含む運転パターンの例として、ブラシレスDCサーボモータは、被駆動部材の反転位置から加速終了までは加速領域、加速終了からブレーキ開始までは定速領域、ブレーキ開始から反転位置までは減速領域となっている。ブラシレスDCサーボモータは、このような所定の運転パターンに従ってPWM制御される。
通常運転モードにおいて、DCサーボ制御部3470は、まず、RAM等のメモリ330から、予め設定されたブラシレスDCサーボモータの運転パターンに基づく、各目標の位置や目標速度を指令値として取得する(S1901)。メモリには、被駆動部材の各目標位置に対応して設定されたブラシレスDCサーボモータの運転パターンに対応する目標速度として、正弦波駆動やPID制御を前提としたモータ駆動信号、例えばPWM制御信号のデータが格納されている。各目標の位置を含む運転パターンの例として、ブラシレスDCサーボモータは、被駆動部材の反転位置から加速終了までは加速領域、加速終了からブレーキ開始までは定速領域、ブレーキ開始から反転位置までは減速領域となっている。ブラシレスDCサーボモータは、このような所定の運転パターンに従ってPWM制御される。
例えば、インバータ駆動信号生成部3480は、多回転のアブソリュート信号を取得し(S1902)、指令値との差分値を算出する(S1903)。また、センサエラー判定処理部3510により、MRセンサ出力とホール素子出力との同期判定を行う(S1904)。さらに、「ずれ」の有無を判定(S1905)において、差分値が許容値を超えていれば「ずれ」有と判定する。また、同期判定では、回転センサユニット20の出力を基に得られた実際の位相差(機械角)Δθの情報と、予めEEPROMに記録されている判定用の位相差(機械角)Δθ0の情報とを比較し、MRセンサ出力とホール素子出力の値に差が無ければ同期しており、実質的な差異があれば、同期していないと判定する。これらの結果に基づいて、センサエラー判定処理部3510は、それが2回目の判定である場合(S1906、S1907)、ずれを含むエラーが回転センサユニット20にあると判定し、ECU500に、異常情報を送信する(S1908)。なお、回転センサユニット20ではなく、EEPROM自体に異常がある場合にも、この時点でチェックできる。
ずれの判定(S1905)で「ずれ」がなかった場合は、PID制御に基づくインバータ駆動信号を生成し(S1909)、インバータ駆動制御部410へ出力する(S1910)。そして、回転センサユニット20からのA相・B相信号に基づく多回転・アブソリュート信号を取得し(S1911)、インバータ駆動信号と多回転・アブソリュート信号との差分ずれ量を算出する(S1912)。さらに、センサエラー判定処理部3510で、MRセンサ出力とホール素子出力との同期判定を行う(S1913)。次に、PID制御におけるずれの有無の判定(S1914)を行う。もし、2回連続して差分ずれ量が許容値を超えた場合や同期していない場合には(S1915、S1916)、ブラシレスDCサーボモータの異常と判定し、ECU500にブラシレスDCサーボモータの異常情報を送信する(S1917)。そして、正常なセンサの出力でサーボ制御を続行する(S1918)。差分ずれ量の判定(S1914)で「ずれ」がなかった場合、新たなインバータ駆動信号を生成し(S1909)、以下、同様の処理を繰り返し、終了の判定(S1919)で運転を終了する。
ずれの判定(S1905)で「ずれ」がなかった場合は、PID制御に基づくインバータ駆動信号を生成し(S1909)、インバータ駆動制御部410へ出力する(S1910)。そして、回転センサユニット20からのA相・B相信号に基づく多回転・アブソリュート信号を取得し(S1911)、インバータ駆動信号と多回転・アブソリュート信号との差分ずれ量を算出する(S1912)。さらに、センサエラー判定処理部3510で、MRセンサ出力とホール素子出力との同期判定を行う(S1913)。次に、PID制御におけるずれの有無の判定(S1914)を行う。もし、2回連続して差分ずれ量が許容値を超えた場合や同期していない場合には(S1915、S1916)、ブラシレスDCサーボモータの異常と判定し、ECU500にブラシレスDCサーボモータの異常情報を送信する(S1917)。そして、正常なセンサの出力でサーボ制御を続行する(S1918)。差分ずれ量の判定(S1914)で「ずれ」がなかった場合、新たなインバータ駆動信号を生成し(S1909)、以下、同様の処理を繰り返し、終了の判定(S1919)で運転を終了する。
このように、本実施例のブラシレスDCサーボモータは、ロータリーエンコーダとして機能する1個のMRセンサ20の出力を利用して制御される、サーボモータである。
本実施例でも、安価なホール素子の出力信号を利用して比較的高い精度の位置情報を生成し、安価で信頼性の高い故障判定が可能な、直流モータの制御装置を提供できる。また、MRセンサが故障した場合も、比較的高精度の位置情報を生成できる、安価で信頼性の高い直流モータの制御装置を提供することができる。
[実施例4]
本実施例でも、安価なホール素子の出力信号を利用して比較的高い精度の位置情報を生成し、安価で信頼性の高い故障判定が可能な、直流モータの制御装置を提供できる。また、MRセンサが故障した場合も、比較的高精度の位置情報を生成できる、安価で信頼性の高い直流モータの制御装置を提供することができる。
[実施例4]
次に、本発明の第4の施例について説明する。第4の施例では、実施例3と同様にして、回転軸の絶対原点位置を求め、回転軸にマグネットを正式に固定した後に、U相、V相、W相の各コイルに関する信号に対して、Z相の幅を確定する。
すなわち、実施例3で、マグネットを回転軸の絶対原点位置に固定する前に、U相、V相、W相の各コイルに関する信号に対して、Z相の幅を確定していたのに代えて、マグネットを回転軸の絶対原点位置に固定した後に、U相、V相、W相の各コイルに関する信号に対して、Z相の幅を確定し、アブソリュートデータのテーブルを生成し、EEPROMに記録する。得られる効果は、本発明の第3の実施例と同じである。
[実施例5]
すなわち、実施例3で、マグネットを回転軸の絶対原点位置に固定する前に、U相、V相、W相の各コイルに関する信号に対して、Z相の幅を確定していたのに代えて、マグネットを回転軸の絶対原点位置に固定した後に、U相、V相、W相の各コイルに関する信号に対して、Z相の幅を確定し、アブソリュートデータのテーブルを生成し、EEPROMに記録する。得られる効果は、本発明の第3の実施例と同じである。
[実施例5]
次に、本発明を、アウターロータ形のブラシレスDCサーボモータに適用した第5の実施例を説明する。図20は、第5の実施例に基づく、ブラシレスDCサーボモータの制御装置の構成例を示す機能ブロック図である。
本実施例のブラシレスDCサーボモータ100は、アウター型のロータ1000と、このロータ1000を回転自在に支持するステータ1200とから構成される。ロータ1000は、回転軸1300と、この回転軸1300が底面に固定されたカップ状のロータカバー1100と、ロータカバー1100の筒状部の内周面に沿って配置された複数極のマグネット1120とを備えている。一方、ステータ1200は、一対の軸受け16,17を介して回転軸1300を回転自在に支持する支持部材1205と、ロータ1000のマグネット1120の内側で半径方向のギャップを介して支持部材1205の筒状部1202にねじ等で固定されたステータコア1220と、このステータコア1220に巻回されたステータコイル1210とを備えている。支持部材1205には、外側からエンドカバー26が固定されている。回転軸1300の一端部及びエンドカバー26には、回転軸1300の回転に伴うインクリメンタル信号を出力する回転センサユニット20が設けられている。
本実施例のブラシレスDCサーボモータ100は、アウター型のロータ1000と、このロータ1000を回転自在に支持するステータ1200とから構成される。ロータ1000は、回転軸1300と、この回転軸1300が底面に固定されたカップ状のロータカバー1100と、ロータカバー1100の筒状部の内周面に沿って配置された複数極のマグネット1120とを備えている。一方、ステータ1200は、一対の軸受け16,17を介して回転軸1300を回転自在に支持する支持部材1205と、ロータ1000のマグネット1120の内側で半径方向のギャップを介して支持部材1205の筒状部1202にねじ等で固定されたステータコア1220と、このステータコア1220に巻回されたステータコイル1210とを備えている。支持部材1205には、外側からエンドカバー26が固定されている。回転軸1300の一端部及びエンドカバー26には、回転軸1300の回転に伴うインクリメンタル信号を出力する回転センサユニット20が設けられている。
回転センサユニット20は、回転軸1300の一端面に固定された平板状のマグネット21と、回転軸の軸方向においてこのマグネット21に対向して配置された1対のMRセンサ、及び、3個のホール素子を含んでいる(図9A、図9C参照)。回転センサユニット20において検出された一対のMRセンサのアナログ信号は、デジタル信号に変換され、インクリメンタルなA相・B相各信号のパルスのデータ(A,B)、及び位置決め信号T0が通信ケーブル28を介して、プリント基板600上に実装された制御ユニットへ送信される。また、回転センサユニット20のホール素子のアナログ信号も、通信ケーブル29を介してプリント基板600上に実装された制御ユニットへ送信される。
制御ユニットでは、回転センサユニット20のデータ等を基に、実施例3で述べたのと同様な処理が実行される。回転軸1300に対するマグネット21の位置も、任意の角度位置(マグネット原点位置(T0))の仮固定位置から、絶対原点位置(Z0)と一致する絶対原点位置(Z0)に変更して固定される。
本実施例でも、安価なホール素子の出力信号を利用して比較的高い精度の位置情報を生成し、安価で信頼性の高い故障判定が可能な、直流モータの制御装置を提供できる。また、MRセンサが故障した場合も、比較的高精度の位置情報を生成できる、安価で信頼性の高い直流モータの制御装置を提供することができる。
10 モータハウジング
11 永久磁石
12 アマチュア
13 回転軸
14 減速機
15 給電端子
16 ブラシ
17 整流子
18 エンドブラケット
20 回転センサユニット
21 マグネット
22 MRセンサ
23 処理回路部
24、25 軸受
40 DCモータ駆動回路
40A、40B パワー回路
41 DCモータ駆動制御部
42 バッテリ
43 電源スイッチ
50 被駆動部材
100 直流モータ
100A 直流モータ
100B 直流モータ
110 ステータコア
111 界磁コイル
112 界磁鉄心
113 絶縁部材
121 ロータヨーク
122 永久磁石
231 AD変換器
232 軸ずれ補正処理部
233 メモリ
234 逆正接演算処理部
235 パルスカウンタ
236 インクリメンタルA相・B相信号生成部
237 マグネット原点位置信号生成部
238 パラレル・シリアル変換部
239 シリアル通信部
300 直流モータの制御ユニット
310 通信制御部
320 メモリ制御部
330 メモリ
331 ROM
332 RAM
333 EEPROM
340 自己イニシャライズ設定部
341 回転センサ出力処理部
342 Z相信号生成部
343 Z相の幅信号生成部
344 絶対原点位置信号生成部
345 DCサーボ制御部
346 PWM信号生成部
347 位相同期処理部
348 センサエラー判定処理部
400 インバータ
410 インバータ駆動制御部
440 電流制御部
450 電流検出/制限部
500 車載のECU
600 プリント基板
11 永久磁石
12 アマチュア
13 回転軸
14 減速機
15 給電端子
16 ブラシ
17 整流子
18 エンドブラケット
20 回転センサユニット
21 マグネット
22 MRセンサ
23 処理回路部
24、25 軸受
40 DCモータ駆動回路
40A、40B パワー回路
41 DCモータ駆動制御部
42 バッテリ
43 電源スイッチ
50 被駆動部材
100 直流モータ
100A 直流モータ
100B 直流モータ
110 ステータコア
111 界磁コイル
112 界磁鉄心
113 絶縁部材
121 ロータヨーク
122 永久磁石
231 AD変換器
232 軸ずれ補正処理部
233 メモリ
234 逆正接演算処理部
235 パルスカウンタ
236 インクリメンタルA相・B相信号生成部
237 マグネット原点位置信号生成部
238 パラレル・シリアル変換部
239 シリアル通信部
300 直流モータの制御ユニット
310 通信制御部
320 メモリ制御部
330 メモリ
331 ROM
332 RAM
333 EEPROM
340 自己イニシャライズ設定部
341 回転センサ出力処理部
342 Z相信号生成部
343 Z相の幅信号生成部
344 絶対原点位置信号生成部
345 DCサーボ制御部
346 PWM信号生成部
347 位相同期処理部
348 センサエラー判定処理部
400 インバータ
410 インバータ駆動制御部
440 電流制御部
450 電流検出/制限部
500 車載のECU
600 プリント基板
Claims (5)
- 直流モータの駆動信号を生成して出力する制御ユニットと、
前記直流モータの回転軸の回転を検知する回転センサユニットとを備え、
前記直流モータの前記駆動信号を生成し、前記回転軸に固定されたアマチュアにブラシを介して供給される電力を制御する、モータ制御装置において、
前記回転センサユニットは、
前記回転軸の一端に固定された平板状のマグネットと、前記回転軸の軸方向において前記マグネットに対向する位置で前記直流モータのステータ側に固定された1対のMRセンサと少なくとも3個のホール素子及び処理回路部とを備えており、
前記1対のMRセンサの出力に基づいて、前記回転軸の回転に伴うインクリメンタルなA相、B相の信号と、該A相、B相の出力信号が特定の関係にある状態を示す位置決め情報とを生成して出力すると共に、前記ホール素子の出力に基づいて前記回転軸の回転角度の情報を生成して出力するように構成されており、
前記制御ユニットは、
イニシャライズ駆動信号により前記直流モータを正逆双方向に所定の回転数で起動運転し、該直流モータを駆動して得られる前記回転センサユニットからの前記A相若しくは前記B相の出力信号と前記位置決め情報と、前記イニシャライズ駆動信号との同期の関係から、前記回転軸に対する前記MRセンサの絶対原点位置(Zα)の情報を取得し、さらに、前記絶対原点位置と前記回転角度の情報との位相差に基づき同期判定情報を生成し、
前記A相若しくは前記B相、及び前記絶対原点位置の情報、及び前記同期判定情報の全データをアブソリュート信号のデータに変換して書き換え可能な不揮発性メモリに記録するように構成されていることを特徴とするモータの制御装置。 - 駆動信号を生成して出力し、ブラシレスDCサーボモータのU相、V相、W相の3相の各ステータコイルに供給される電力を制御する制御ユニットと、
多極の永久磁石を有するロータの回転を検知する1個の回転センサユニットとを備えたブラシレスDCサーボモータの制御装置において、
前記回転センサユニットは、
前記ロータの回転軸の一端に固定され、径方向に着磁された1組のN極領域とS極領域を有する平板状のマグネットと、該マグネットに対向する位置でステータ側に固定された1対のMRセンサ、少なくとも3個のホール素子及び処理回路部とを備えており、
前記処理回路部は、前記マグネットのN極領域とS極領域の境界線上の位置を、マグネット原点位置とし、前記1対のMRセンサの出力に基づいて、前記回転軸の回転に伴うA相、B相の信号を生成して出力し、前記マグネットの原点位置の情報を生成すると共に、さらに、前記ホール素子の出力に基づいて前記回転軸の回転角度の情報を生成して出力するように構成されており、
前記制御ユニットは、
前記ロータの極数に合わせて、前記回転センサユニットの前記A相若しくは前記B相の出力信号の立ち上がり位相に同期する、前記U相、V相、W相の各位相情報を生成する機能と、
前記3相のいずれか1相のステータコイルへの駆動信号が零から立ち上がる位相と、該モータの駆動により得られる前記1相のステータコイルへの逆起電力の積分値ピークの位相と、前記駆動信号の零に対応する前記回転センサユニットからの前記A相若しくは前記B相の出力信号の立ち上がり位相との同期関係に基づき、前記駆動信号に対する前記回転軸の絶対原点位置を取得する機能と、
前記駆動信号の零に対応する前記A相又は前記B相の出力信号の立ち上がりに同期する360度間隔の複数のZ相信号を設定する機能と、
前記絶対原点位置と前記回転角度の情報との位相差に基づき同期判定情報を生成する機能とを備えており、
前記マグネットは前記原点位置が、前記回転軸の前記絶対原点位置と同期する位置に固定されており、
前記MRセンサユニットを前記U相、V相、及びW相のロータリーエンコーダとして、前記モータを駆動するように構成されていることを特徴とするブラシレスDCサーボモータの制御装置。 - 請求項2において、
前記制御ユニットは、
前記各Z相信号の最初のA相信号の立ち上がり若しくは前記A相信号の立ち下がりに同期し、前記A相信号の1~数パルス分の幅を有する複数の、Z相の幅の信号を生成する機能と、
前記マグネット原点位置を基準とする、前記A相、B相、前記Z相信号、前記Z相の幅の信号、及び、前記U相、V相、W相の各位相の情報に書き換え可能な不揮発性メモリのアドレスを付与し、暫定多回転アブソリュート信号のデータとして生成する機能と、
前記暫定多回転ブソリュート信号のデータを、前記回転軸の前記絶対原点位置を基準とする多回転・アブソリュート信号のデータに変換し、前記同期判定情報と共に、前記書き換え可能な不揮発性メモリに記録する機能とを備え、
前記書き換え可能な不揮発性メモリのデータを利用して、前記モータを駆動するように構成されていることを特徴とするブラシレスDCサーボモータの制御装置。 - 回転軸に固定されたアマチュアにブラシを介して電力が供給され、正逆双方向に回転するように構成されている、ブラシ付き直流モータであって、
請求項1記載の前記回転センサユニット及び前記制御ユニットを備えており、
前記回転角度の情報と前記同期判定情報に基づく同期判定を行い、前記回転センサユニットの故障の有無の判定を行い、
前記判定において、前記MRセンサが故障したと判定された場合、前記ホール素子の出力に基づいて前記アマチュアに供給される電力を制御することを特徴とするブラシ付き直流モータ。 - 請求項2記載の前記回転センサユニット及び前記制御ユニットを備えており、
前記回転角度の情報と前記同期判定情報に基づく同期判定を行い、前記回転センサユニットの故障の有無の判定を行い、
前記判定において、前記MRセンサが故障したと判定された場合、前記ホール素子の出力に基づいて前記ステータコイルに供給される電力を制御することを特徴とするブラシブラシレスDCサーボモータ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2017/039805 WO2019087364A1 (ja) | 2017-11-02 | 2017-11-02 | 直流モータの制御装置 |
| JP2018517236A JP6339307B1 (ja) | 2017-11-02 | 2017-11-02 | 直流モータの制御装置 |
| EP17910507.7A EP3503379B1 (en) | 2017-11-02 | 2017-11-02 | Control device of direct current motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2017/039805 WO2019087364A1 (ja) | 2017-11-02 | 2017-11-02 | 直流モータの制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019087364A1 true WO2019087364A1 (ja) | 2019-05-09 |
Family
ID=62487376
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/039805 WO2019087364A1 (ja) | 2017-11-02 | 2017-11-02 | 直流モータの制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3503379B1 (ja) |
| JP (1) | JP6339307B1 (ja) |
| WO (1) | WO2019087364A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109639211A (zh) * | 2019-02-22 | 2019-04-16 | 深圳市嘉昱机电有限公司 | 一种闸机控制系统及控制方法 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102018215783A1 (de) * | 2018-09-18 | 2020-03-19 | Robert Bosch Gmbh | Positionserfassungssystem und Verfahren zur Erfassung einer Bewegung einer Maschine |
| KR102247797B1 (ko) * | 2019-02-19 | 2021-05-04 | 가부시키가이샤 이가라시덴키세이사쿠쇼 | 범용형 로터리 인코더 및 그것을 사용한 서보모터 |
| WO2021090372A1 (ja) * | 2019-11-05 | 2021-05-14 | 株式会社五十嵐電機製作所 | 汎用型ロータリーエンコーダ |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101922432A (zh) * | 2010-10-06 | 2010-12-22 | 方懂平 | 船用及户外型节能空压机 |
| JP2012202906A (ja) | 2011-03-28 | 2012-10-22 | Minebea Co Ltd | 角度検出装置 |
| JP2012213262A (ja) * | 2011-03-31 | 2012-11-01 | Ts Tech Co Ltd | モータ制御装置及び車両用シート装置 |
| JP2013042605A (ja) * | 2011-08-17 | 2013-02-28 | Minebea Co Ltd | モータ駆動装置 |
| CN102969833A (zh) * | 2012-10-16 | 2013-03-13 | 张斌 | 电发动机 |
| JP2015149800A (ja) | 2014-02-05 | 2015-08-20 | キヤノン株式会社 | 永久磁石モータの制御装置及び画像形成装置 |
| JP2016109554A (ja) | 2014-12-05 | 2016-06-20 | 株式会社ジェイテクト | 回転角検出装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4044880B2 (ja) * | 2003-08-05 | 2008-02-06 | 株式会社日立製作所 | 非接触式角度測定装置 |
| EP3051672A4 (en) * | 2013-09-24 | 2017-06-28 | Mitsuba Corporation | Brushless wiper motor |
-
2017
- 2017-11-02 EP EP17910507.7A patent/EP3503379B1/en active Active
- 2017-11-02 WO PCT/JP2017/039805 patent/WO2019087364A1/ja unknown
- 2017-11-02 JP JP2018517236A patent/JP6339307B1/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101922432A (zh) * | 2010-10-06 | 2010-12-22 | 方懂平 | 船用及户外型节能空压机 |
| JP2012202906A (ja) | 2011-03-28 | 2012-10-22 | Minebea Co Ltd | 角度検出装置 |
| JP2012213262A (ja) * | 2011-03-31 | 2012-11-01 | Ts Tech Co Ltd | モータ制御装置及び車両用シート装置 |
| JP2013042605A (ja) * | 2011-08-17 | 2013-02-28 | Minebea Co Ltd | モータ駆動装置 |
| CN102969833A (zh) * | 2012-10-16 | 2013-03-13 | 张斌 | 电发动机 |
| JP2015149800A (ja) | 2014-02-05 | 2015-08-20 | キヤノン株式会社 | 永久磁石モータの制御装置及び画像形成装置 |
| JP2016109554A (ja) | 2014-12-05 | 2016-06-20 | 株式会社ジェイテクト | 回転角検出装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3503379A4 * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109639211A (zh) * | 2019-02-22 | 2019-04-16 | 深圳市嘉昱机电有限公司 | 一种闸机控制系统及控制方法 |
| CN109639211B (zh) * | 2019-02-22 | 2024-02-06 | 深圳市嘉昱机电有限公司 | 一种闸机控制系统及控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3503379A1 (en) | 2019-06-26 |
| EP3503379A4 (en) | 2020-07-08 |
| JPWO2019087364A1 (ja) | 2019-11-21 |
| JP6339307B1 (ja) | 2018-06-06 |
| EP3503379B1 (en) | 2021-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10879820B2 (en) | Control device for brushless DC servo motor | |
| JP6438176B1 (ja) | Dcモータの制御装置 | |
| JP6339307B1 (ja) | 直流モータの制御装置 | |
| CN108885125B (zh) | 电机系统 | |
| KR102247797B1 (ko) | 범용형 로터리 인코더 및 그것을 사용한 서보모터 | |
| EP3865828A1 (en) | Multipurpose rotary encoder | |
| EP3982089B1 (en) | Magnetic sensor system for motor control | |
| JP2004271503A5 (ja) | ||
| JP2007132862A (ja) | 磁気式エンコーダ | |
| JP6412281B1 (ja) | ブラシレスdcサーボモータの制御装置 | |
| KR101655297B1 (ko) | 리니어 홀 센서 위치보정장치 및 그 위치보정방법 | |
| WO2019054475A1 (ja) | モータ駆動システムおよびモータの制御方法 | |
| JP2007082315A (ja) | 電動パワーステアリング用モータ及びその制御装置 | |
| JP6966143B1 (ja) | バッテリレス対応のロータリーエンコーダ及びそれを用いたサーボ制御装置 | |
| JP6232526B1 (ja) | 直流モータの制御装置 | |
| JP6419922B1 (ja) | 直流モータの制御装置 | |
| WO2022034629A1 (ja) | ロータリーエンコーダ及びそれを用いた制御精度切替型サーボ制御装置 | |
| JP2020134505A (ja) | 汎用型ロータリーエンコーダ | |
| JP2023039053A (ja) | 多機能磁気式ロータリーエンコーダ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase |
Ref document number: 2018517236 Country of ref document: JP Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 2017910507 Country of ref document: EP Effective date: 20181130 |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17910507 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |