WO2019012730A1 - Dispositif de diagnostic d'anomalie, procédé de diagnostic d'anomalie et programme informatique - Google Patents
Dispositif de diagnostic d'anomalie, procédé de diagnostic d'anomalie et programme informatique Download PDFInfo
- Publication number
- WO2019012730A1 WO2019012730A1 PCT/JP2018/007060 JP2018007060W WO2019012730A1 WO 2019012730 A1 WO2019012730 A1 WO 2019012730A1 JP 2018007060 W JP2018007060 W JP 2018007060W WO 2019012730 A1 WO2019012730 A1 WO 2019012730A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- anomaly
- brake
- anomaly detection
- diagnosis
- deceleration
- Prior art date
Links
- 238000003745 diagnosis Methods 0.000 title claims abstract description 182
- 238000000034 method Methods 0.000 title claims description 16
- 238000004590 computer program Methods 0.000 title claims description 7
- 238000001514 detection method Methods 0.000 claims abstract description 184
- 238000005259 measurement Methods 0.000 description 19
- 238000010586 diagram Methods 0.000 description 17
- 238000012423 maintenance Methods 0.000 description 17
- 230000015556 catabolic process Effects 0.000 description 13
- 238000006731 degradation reaction Methods 0.000 description 13
- 238000009826 distribution Methods 0.000 description 11
- 230000002547 anomalous effect Effects 0.000 description 10
- 238000012545 processing Methods 0.000 description 8
- 238000006243 chemical reaction Methods 0.000 description 5
- 238000004891 communication Methods 0.000 description 5
- 238000005070 sampling Methods 0.000 description 5
- 238000010248 power generation Methods 0.000 description 4
- 230000001172 regenerating effect Effects 0.000 description 4
- 230000004044 response Effects 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 238000005299 abrasion Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 238000001556 precipitation Methods 0.000 description 2
- 238000000611 regression analysis Methods 0.000 description 2
- 239000013589 supplement Substances 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 230000001052 transient effect Effects 0.000 description 2
- 238000007476 Maximum Likelihood Methods 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000002790 cross-validation Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 238000005401 electroluminescence Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000000704 physical effect Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 238000010200 validation analysis Methods 0.000 description 1
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/0081—On-board diagnosis or maintenance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L27/00—Central railway traffic control systems; Trackside control; Communication systems specially adapted therefor
- B61L27/50—Trackside diagnosis or maintenance, e.g. software upgrades
- B61L27/57—Trackside diagnosis or maintenance, e.g. software upgrades for vehicles or trains, e.g. trackside supervision of train conditions
Definitions
- Embodiments of the present invention relate to an anomaly diagnosis device, an anomaly diagnosis method, and a computer program.
- a travel condition dynamically changes in a temporally sequential manner due to, for example, a rail track slope, a weather change, passenger loading and unloading, and an operation by a driver.
- a travel condition dynamically changes in a temporally sequential manner due to, for example, a rail track slope, a weather change, passenger loading and unloading, and an operation by a driver.
- it is difficult to perform accurate diagnosis of such a vehicle.
- Embodiments of the present invention provide an anomaly diagnosis device, an anomaly diagnosis method, and a computer program that achieve highly accurate diagnosis.
- an anomaly diagnosis device includes an anomaly detector and a diagnose.
- the anomaly detector performs anomaly detection of deceleration performance of a vehicle based on a control command value for a brake device and a prediction model for deceleration of the vehicle.
- the anomaly detector performs anomaly detection of the brake device based on the control command value and a prediction model for braking force of the brake device.
- the diagnoser diagnoses the vehicle based on a result of the anomaly detection of the deceleration performance and a result of the anomaly detection of the brake device.
- FIG. 1 is a block diagram of an anomaly diagnosis system according to an embodiment of the present invention.
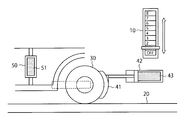
- FIG. 2 is a diagram illustrating an exemplary configuration of a brake notch, a brake, and an air spring of a railway vehicle.
- FIG. 3 is a diagram illustrating an exemplary configuration of a power generation brake and a regenerative brake of the railway vehicle.
- FIG. 4 is a diagram illustrating an exemplary table related to measurement information and environment information.
- FIG. 5 is a diagram illustrating an exemplary table related to the measurement information.
- FIG. 6 is a diagram illustrating an exemplary conversion table.
- FIG. 7 is a diagram illustrating an exemplary model database.
- FIG. 8 is a diagram illustrating an exemplary method of determining a threshold by using a normal distribution.
- FIG. 8 is a diagram illustrating an exemplary method of determining a threshold by using a normal distribution.
- FIG. 9 is a diagram illustrating an exemplary operation of an anomaly detector.
- FIG. 10 is a diagram illustrating an exemplary detection result database.
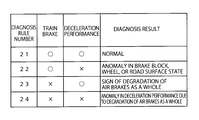
- FIG. 11 is a diagram illustrating an exemplary diagnosis rule database.
- FIG. 12 is a diagram illustrating an exemplary display screen of diagnosis output information.
- FIG. 13 is a diagram illustrating another exemplary diagnosis rule database.
- FIG. 14 is a diagram illustrating another exemplary diagnosis rule database.
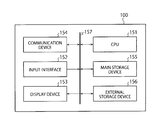
- FIG. 15 is a diagram illustrating a hardware configuration of the anomaly diagnosis device according to the present embodiment of the present invention.
- FIG. 16 is a flowchart of diagnosis processing according to the embodiment of the present invention.
- FIG. 1 is a block diagram illustrating an exemplary anomaly diagnosis system according to an embodiment of the present invention.
- the anomaly diagnosis system illustrated in FIG. 1 includes an anomaly diagnosis device 100, a vehicle system 200, an environment information system 300, a terminal 400, an input device 500, and a screen display device 600.
- the outline of the anomaly diagnosis system will be described below.
- the anomaly diagnosis device 100 has a learning mode and an operation mode.
- a model generator 140 generates an anomaly detection model for deceleration performance of a railway vehicle (hereinafter, a vehicle) based on at least one of measurement information of the vehicle acquired from the vehicle system 200 and environment information of the vehicle acquired from the environment information system 300.
- Information including at least one of the measurement information of the vehicle and the environment information of the vehicle is referred to as travel information.
- the vehicle may be included in a vehicle train as a plurality of connected vehicles.
- the model generator 140 also generates an anomaly detection model for a brake device of the vehicle based on the travel information.
- the present embodiment assumes an air brake as the brake device, and an anomaly detection model is generated for the air brake.
- an anomaly detection model for the brake device may be generated for each vehicle provided with the brake device.
- An anomaly detection model to be applied in common to a plurality of brake devices may be generated instead of generating an anomaly detection model for each individual brake device.
- the model generator 140 also generates an anomaly detection model for a brake system (hereinafter referred to as a train brake).
- the train brake includes brake devices provided in a plurality of vehicles, and an anomaly detection model for the train brake is an anomaly detection model for all brake devices.
- the various anomaly detection models generated by the model generator 140 are stored in a model database 102.
- an anomaly detector 150 performs anomaly detection of the deceleration performance by using a deceleration performance anomaly detection model.
- the anomaly detector 150 also performs anomaly detection of each air brake by using the anomaly detection model for the air brake.
- the anomaly detector 150 also performs anomaly detection of the train brake by using the anomaly detection model for the train brake.
- Anomaly detection determines whether there is an anomaly. Anomaly detection is also called anomaly determination. Results of the anomaly detection of the deceleration performance, the air brakes, and the train brake are stored in a detection result database 103.
- a diagnoser 160 performs vehicle diagnosis based on the anomaly detection result of the deceleration performance, the anomaly detection result of the air brakes, and the anomaly detection result of the train brake. For example, when the deceleration performance is normal, the air brakes are anomalous, and the train brake is anomalous, the diagnoser 160 diagnoses that there is a sign of degradation of all air brakes. When the deceleration performance is anomalous, the train brake is normal, and one of the air brakes is anomalous, the diagnoser 160 diagnoses that the deceleration performance has an anomaly attributable to degradation of the one brake device. Such diagnosis uses various diagnosis rules stored in a diagnosis rule database 104.
- the diagnoser 160 generates diagnosis output information in accordance with a diagnosis result and displays the generated diagnosis output information on the screen display device 600.
- This display supports monitoring by, for example, a railway maintenance person or driver.
- the learning mode and the operation mode may be switched automatically or by an instruction by a maintenance person or the like, or may be executed in parallel.
- FIG. 2 illustrates an exemplary configuration of the brake notch, and an air brake and an air spring for a particular wheel of the vehicle.
- the brake notch is located in a driver room of a train in reality.
- a brake lever 10 as an exemplary controller provides a driver with a means for a brake operation.
- the driver brakes the vehicle by moving the brake lever upward.
- the numbers of one to eight that are indicated on the brake lever 10 represent brake notches (brake steps), and a larger number means a stronger braking force applied to the vehicle. This number of notches is exemplary and does not prevent the vehicle from using a larger or smaller number of notches.
- Each brake notch is an exemplary control command value for the vehicle or the air brake.
- the brake operation to the vehicle is not limited to an operation performed by a driver.
- the brake operation is performed by the device in place of a driver in some cases.
- a braking command output from the device corresponds to the control command value.
- FIG. 2 illustrates a wheel 30 of a vehicle traveling on a rail 20.
- One means for braking the vehicle with a brake is a tread brake 42 as a kind of the air brake.
- a tread brake 42 as a kind of the air brake.
- only one wheel is illustrated for simplicity of description, but in reality, a plurality of pairs of right and left wheels are provided.
- one air brake is included in each vehicle. However, some vehicles may include no air brake.
- the tread brake 42 uses an air cylinder as a power source.
- brake cylinder pressure that is the pressure inside an air cylinder 43
- a brake block 41 is pressed against a tread as a surface of the wheel 30, which contacts with the rail. Frictional force between the wheel 30 and the brake block 41 functions as braking force of the tread brake 42.
- the tread brake uses the frictional force of the brake block in this manner, the brake block is abraded by continuous use, which potentially decreases the braking force.
- the tread brake is an exemplary mechanical brake used for a vehicle, and another scheme uses a disk brake that obtains braking force by pressing, with, for example, a pad, a disk fixed to a wheel shaft against a wheel.
- the braking force of a brake varies with an abrasion state of, for example, the brake block or the pad.
- the braking force of an air brake also varies with a load on a vehicle in addition to the abrasion of a component thereof.
- a load responsive device 50 is mounted on the vehicle illustrated in FIG. 2.
- the load responsive device 50 includes an air spring 51 and measures a load on the vehicle by detection air spring pressure of the air spring 51.
- the braking force of the brake may be adjusted in response to the air spring pressure detected by the load responsive device 50. Accordingly, desired deceleration can be achieved irrespective of change of a load on the vehicle.
- FIG. 3 illustrates an exemplary configuration of a power generation brake and a regenerative brake of a vehicle. This vehicle is one vehicle in a train and is connected with other vehicles before and after the vehicle.
- Main electric motors 60a and 60b are mounted on the vehicle illustrated in FIG. 3. When the power generation brake is used, the main electric motors 60a and 60b form a closed circuit with a resistor 70 to convert electrical power of the main electric motors into thermal energy.
- the regenerative brake When the regenerative brake is used, electrical power generated by the main electric motors 60a and 60b is transmitted to a line 90 through a pantograph 80. When a secondary battery is mounted on the vehicle, the generated electrical power may be used to charge the secondary battery. In this manner, the regenerative brake obtains braking force through conversion of kinetic energy into electrical power by using the main electric motors 60a and 60b as electric generators.
- the mechanical brake and the power generation brake are exemplary, and the anomaly diagnosis device 100 can perform anomaly detection and diagnosis on a brake of any other scheme used.
- brakes of a plurality of schemes having different characteristics are used in a vehicle as described above.
- the braking force of the brake of a vehicle varies with a load as described above.
- a load largely varies with the amount of cargo.
- deceleration when the brake operation is performed potentially varies between travel routes and intervals of a vehicle, which have different slope and cant tendencies.
- any difference in weather conditions of precipitation, atmospheric temperature, and the like potentially changes the physical property of a component of the brake, affecting the characteristic of the brake.
- drivers perform the brake operation in different manners, and vehicles are manufactured with different brake characteristics.
- the anomaly detection model for deceleration performance (anomaly detection model for brake performance) and the anomaly detection model for a train brake are used together with the anomaly detection model for an air brake to reduce the risk of false diagnosis, thereby achieving early anomaly detection and safe and reliable railway operation.
- an anomaly diagnosis target vehicle is assumed to be a railway vehicle but is not limited thereto.
- the anomaly diagnosis target vehicle may be an optional vehicle including a wheel, such as an automobile, a construction machine, or an aircraft.
- the anomaly diagnosis device 100 illustrated in FIG. 1 includes a vehicle information collector 110, an environment information collector 120, a data processor 130, the model generator 140, the anomaly detector 150, the diagnoser 160, and an alarm 170.
- the vehicle information collector 110 acquires measurement information (also referred to as measurement data) related to the vehicle from various sensors of the vehicle system 200 inside of the vehicle.
- the sensors include a sensor configured to sense the brake operation of the vehicle or the like as a control command value, a sensor configured to detect the deceleration of the vehicle, a sensor configured to detect a driving speed, and a sensor configured to measure a load applied to the vehicle. Other various sensors may be included.
- the measurement information includes a sensed value (control command value, for example) of a sensor, and a measured value (driving speed, load, or deceleration, for example) of a sensor. When the vehicle system 200 calculates deceleration from the value of a speed sensor, the calculated deceleration may be acquired as a measured value of deceleration.
- the kind of the measurement information to be acquired may be optionally set.
- the measurement information may be acquired in an optionally set period.
- the measurement information related to the driving speed of the vehicle is acquired in a short sampling period in milliseconds.
- the value of the sensor configured to measure a load applied to the vehicle is acquired in a sampling period in minutes.
- the environment information collector 120 acquires environment information of the vehicle from the environment information system 300.
- Examples of the environment information include information related to an operation route and information related to weather.
- Examples of the information related to an operation route include a slope and a cant (height difference between inner and outer rails of railway) for each interval.
- Examples of the information related to weather include weather, the atmospheric temperature, the amount of precipitation, the speed of wind, and the atmospheric pressure.
- the acquisition of the environment information may be acquisition of information accumulated in a database in a ground system, or acquisition of information distributed from an external server.
- the kind of the environment information to be acquired and the frequency of the acquisition may be optionally set.
- the anomaly diagnosis device 100 may be installed as a ground device outside of the vehicle, for example, in a facility or an operation command center of a railway operation management company, or may be installed as an on-board device on the vehicle.
- the anomaly diagnosis device 100 is not limited to a particular installation manner.
- the anomaly diagnosis device 100 When the anomaly diagnosis device 100 is installed as a ground device outside of the vehicle, the measurement information of the vehicle system 200 inside of the vehicle and the like are received through, for example, an on-board element, a transponder ground element, and a ground information network. Specifically, the vehicle system 200 transmits data to the ground information network through the ground element and the like, and the anomaly diagnosis device 100 receives the data through the ground information network.
- the ground information network may use, for example, a metallic cable, a coaxial cable, an optical cable, a phone line, a wireless device, or Ethernet (registered trademark), but is not limited to a particular scheme.
- the anomaly diagnosis device 100 receives data from the environment information system 300 through the ground information network.
- the anomaly diagnosis device 100 acquires data from the vehicle system 200 through an information network inside of the vehicle.
- the information network inside of the vehicle is, for example, Ethernet or a wireless local area network (LAN), but may be achieved in any other scheme.
- the anomaly diagnosis device 100 may use the on-board element and the transponder ground element to acquire data from the environment information system 300 connected with the ground information network.
- the input device 500 provides an interface for an operation by a maintenance person.
- the input device 500 includes a mouse, a keyboard, a voice recognition system, an image recognition system, a touch panel, or a combination thereof.
- the maintenance person can perform an operation by inputting various commands or data to the anomaly diagnosis device 100 through the input device 500.
- the screen display device 600 displays, as a still image or a moving image, data or information output from the anomaly diagnosis device 100.
- the screen display device 600 is, for example, a liquid crystal display (LCD), an organic electroluminescence display, or a vacuum fluorescence display (VFD), but may be a display device in any other scheme.
- Each of the input device 500 and the screen display device 600 may be one of a plurality of installed devices.
- the input device 500 and the screen display device 600 may be installed at each of the operation command center and an operation table of the vehicle.
- the input device 500 and the screen display device 600 may be one integrated device.
- a single device may serve as the input device 500 and the screen display device 600.
- the anomaly diagnosis device 100 includes databases of an information database 101, the model database 102, the detection result database 103, and the diagnosis rule database 104.
- the databases 101, 102, 103, and 104 are all disposed inside of the anomaly diagnosis device 100 illustrated in FIG. 1.
- the disposition of the databases is not limited to a particular method.
- part of the databases may be disposed in an external server or storage device.
- Each database can be implemented by a relational database management system and various NoSQL systems, but may be implemented in any other scheme.
- Each database may employ a storage format of XML, JSON, or CSV, or any other format such as a binary format.
- Not all databases inside of the anomaly diagnosis device 100 need to be achieved by an identical database system and an identical storage format, but the databases may be achieved in a mixture of a plurality of schemes.
- the information database 101 stores the measurement information acquired by the vehicle information collector 110 and the environment information acquired by the environment information collector 120.
- the travel information according to the present embodiment includes at least one of the measurement information and the environment information.
- a storage medium such as a memory device storing the travel information may be inserted into the anomaly diagnosis device 100 and used as the information database 101.
- FIGS. 4 and 5 illustrate an exemplary information database 101.
- the travel information (the measurement information and the environment information) is stored, for example, in a form of a table 101a illustrated in FIG. 4 and a table 101b illustrated in FIG. 5.
- the travel information is stored in two separate tables in accordance with sampling frequencies.
- the "time" column of the table 101a illustrated in FIG. 4 stores the generation time of an entry.
- an entry is generated in each constant sampling time.
- an entry may be generated at an interval set to a rail track in advance or in any other scale.
- the "train/vehicle" column of the table 101a stores values identifying a train and a vehicle.
- the present embodiment assumes a case in which one brake device is disposed in each vehicle. However, some vehicles may include no brake device. A plurality of brake devices may be included in one vehicle.
- the "weather” column of the table 101a stores information related to weather acquired from the environment information system 300.
- the "atmospheric temperature” column of the table 101a stores information related to the atmospheric temperature acquired from the environment information system 300.
- the information related to the atmospheric temperature may be an actual value or a label classifying the actual value.
- the "atmospheric temperature” column stores the label of any one of classes T1, T2, T3, T4, T5, T6, and T7 into which the atmospheric temperature as a real number is converted by using a conversion table 101c illustrated in FIG. 6.
- the atmospheric temperature at -11°Cis converted into class T1 the atmospheric temperature at 15°C is converted into class T4, and the atmospheric temperature at 33°C is converted into class T6.
- a column other than the "atmospheric temperature” column may also store processed information obtained by performing calculation or conversion on the measurement information or the environment information.
- the "boarding rate" column of the table 101a stores a boarding rate in percentage as an index for a load applied to the vehicle. Another index may be used to indicate a load.
- the boarding rate is defined with, for example, a ratio of the capacity of a vehicle and the number of passengers in the vehicle.
- the boarding rate is often estimated based on the air spring pressure of the load responsive device. In such a case, the air spring pressure may be directly used as the index.
- the air spring pressure is the actual value of a sensor, which is not a value estimated indirectly by using, for example, a conversion table or a formula unlike the boarding rate, and thus can be used to reduce error in model generation.
- the air spring pressure takes a value depending on the manufacturer and the model number of the load responsive device mounted on the vehicle, and thus lacks in versatility.
- the difference between vehicles due to different load responsive devices thereof can be absorbed in some cases when a typically used index such as the boarding rate is used.
- the "slope" column of the table 101a stores the slope of a route in a value expressed in the unit of permil.
- the permil is a value obtained by expressing a height difference for the horizontal distance of 1000 m in meters.
- the permil is exemplary, and the "slope" column may store a value in another unit.
- the "cant" column of the table 101a stores a cant in millimeters, but may store a value in another unit.
- the table 101a further includes the "wind speed” column and the “atmospheric pressure” column.
- the table 101a may include columns storing other information such as the current position and the current section on the rail track.
- the table 101b illustrated in FIG. 5 stores time information, a brake notch, the actual value of the deceleration of the vehicles, and the actual values of the air brake pressures of the air brakes 1 to N provided in the vehicles. Entries in the table 101b are generated in a time interval shorter than that for the table 101a. The generation interval (sampling interval) of entries in the table 101b may be same as that for the table 101a. The table 101b and the table 101a may be integrated with each other.
- the deceleration may be the value of an acceleration sensor or may be calculated from the value of a speed sensor.
- Data stored in the information database 101 may be processed.
- the data processor 130 causes the screen display device 600 to display the content of each table stored in the information database 101.
- a maintenance person or a driver performs a processing operation on data by using the input device 500.
- the data processor 130 performs data processing in accordance with the processing operation.
- the interval of acquisition of information or data by the vehicle information collector 110 or the environment information collector 120 may be adjusted.
- the data processor 130 receives an operation to specify the acquisition interval from a maintenance person or a driver through the input device 500, and adjusts the acquisition interval in accordance with the content of the operation.
- the model generator 140 generates the anomaly detection model for deceleration performance, the anomaly detection model for a brake device (air brake), and the anomaly detection model for a train brake by using data stored in the information database 101.
- the anomaly detection model for deceleration performance includes a deceleration prediction model (hereinafter referred to as a deceleration model), and a threshold (hereinafter referred to as a deceleration threshold) related to a residual from a predicted value of the deceleration model.
- the deceleration threshold is used in anomaly detection of the deceleration of the vehicle by the anomaly detector 150. Specifically, the deceleration threshold is used in comparison with residual as the difference between the predicted value of the deceleration model and the actual value of the deceleration.
- the anomaly detection model for a brake device includes a braking force prediction model, and a threshold (hereinafter referred to as an individual brake threshold) related to a residual from a predicted value of the prediction model.
- the braking force of an air brake corresponds to the air brake pressure.
- the braking force prediction model is assumed to be an air brake pressure prediction model (hereinafter referred to as an air brake pressure model).
- the individual brake threshold is used in anomaly detection of each brake device by the anomaly detector 150. Specifically, the individual brake threshold is used in comparison with a residual as the difference between the predicted value of the air brake pressure model and the actual value of the air brake pressure.
- the anomaly detection model for a train brake includes a prediction model (hereinafter referred to as a train brake model) for a value based on the braking forces of a plurality of brake devices, and a threshold (hereinafter referred to as a train brake threshold) related to a residual from a predicted value of the prediction model.
- the brake devices are assumed to be air brakes, and a prediction model for the sum of the air brake pressures is assumed.
- the sum of the braking forces may be replaced with a statistical value such as an average value or a median value, or any other value based on the braking forces of a plurality of brake devices.
- the train brake threshold is used in comparison with a residual as the difference between the predicted value of the train brake model and the sum of the actual values of the air brake pressures.
- These anomaly detection models generated by the model generator 140 are stored in the model database 102.
- FIG. 7 illustrates an example of the model database 102.
- Each anomaly detection model is identified by a model ID.
- the column of prediction model stores data indicating a prediction model or the address (pointer) of a memory at which the prediction model is stored.
- the column of threshold stores a threshold set to the prediction model.
- the generation of an anomaly detection model is performed in the learning mode, for example, when the anomaly diagnosis device 100 is started or when a vehicle is newly added as a diagnosis target.
- an anomaly detection model is generated for each diagnosis target.
- the model generator 140 may reproduce an anomaly detection model periodically or in response to an instruction by, for example, a maintenance person and update the previous anomaly detection model with the reproduced anomaly detection model.
- the anomaly detection model is generated by using a data sample (feature vector) extracted from the information database 101.
- the following description will be made on an example in which an anomaly detection model for deceleration is generated, but the anomaly detection model for an air brake and the anomaly detection model for a train brake can be generated in a similar manner.
- the data sample (feature vector) includes one or more explanatory variables.
- An example of the explanatory variable is the value (control command value) of the brake notch in the table 101b. Any other value (speed, for example) in the travel information and specifications of a vehicle (the size and weight of the vehicle, for example) may be additionally used as explanatory variables.
- An explanatory variable may be generated through calculation of a plurality of items included in the travel information. In this example, the objective variable of a prediction model is deceleration.
- the data sample may be generated for each entry in the brake information table 101b, or a plurality of continuous entries with lower temporal granularity may be collected to generate one data sample.
- model generator 140 performs multiple regression analysis to calculate Formula (1) that predicts deceleration as the objective variable.
- y represents the objective variable
- x n represents an explanatory variable
- b n represents a partial regression coefficient (parameter).
- the parameter may be calculated by maximum likelihood estimation or the like.
- a standard partial regression coefficient may be used as the partial regression coefficient b n by normalizing the objective variable and all explanatory variables to the average value of 0 and the dispersion of 1.
- the number of explanatory variables may be one or more.
- model generation by the multiple regression analysis is exemplary, and a prediction model for the objective variable may be generated by any other method such as support vector regression or autoregression.
- cross validation may be used.
- a data sample can be divided into a plurality of sets so that at least one of the sets is used as test data for validation and the other sets are used for model generation. This allows the performance of a generated model to be checked.
- a sufficient estimation accuracy is not obtained by using a simple relational formula, for example, when only the control command value is used as an explanatory variable. This is because of, for example, transient response of deceleration or an external factor such as a rail track slope.
- the parameter estimation may be performed with taken into account whether the deceleration is in transient response or stationary, a switching pattern of the brake notch, and the influence of a rail track slope.
- the control command value (brake notch) may be used as an explanatory variable, and the air brake pressure may be used as the objective variable.
- the control command value (brake notch) may be used as an explanatory variable, and the sum of the air brake pressures of a plurality of air brakes may be used as the objective variable. Any explanatory variable other than the control command value may be added.
- the information database 101 stores information acquired when brake devices (air brakes) are normal.
- various prediction models (the deceleration model, the air brake pressure model, and the train brake model) generated in the learning mode are modeled based on an assumption that these air brakes are normal.
- the prediction models are applicable to a case in which the information database 101 stores measurement information of some failed air brakes.
- a prediction model means any of the deceleration model, the air brake pressure model, and the train brake model.
- the threshold means any of the deceleration threshold, the individual brake threshold, and the train brake threshold.
- the threshold is used to determine that there is an anomaly when the difference between the predicted value of the objective variable (for example, the predicted value of deceleration), which is calculated based on the prediction model, and the measured value (actual value) of deceleration exceeds the threshold.
- the anomaly determination is also called anomaly detection.
- the difference between the predicted value and the actual value is referred to as a residual.
- the actual value can be larger or smaller than the predicted value, and thus the value of the residual can be positive or negative.
- the residual may be defined to be the absolute value of the difference, which is the absolute value of the distance from the predicted value.
- FIG. 8 is used to describe an exemplary threshold determination method using a normal distribution.
- FIG. 8 illustrates the graph of a normal distribution 401 of residual.
- the horizontal axis represents the residual, and the vertical axis represents a probability density.
- a plurality of residuals between the predicted value of a prediction model and the actual value are acquired to produce the normal distribution 401, assuming that these residuals obey a normal distribution.
- Data used to acquire the residuals may be a data sample used to generate the prediction model, test data, travel information unrelated to generation of the prediction model, or an optional combination thereof.
- the distribution has a more spread skirt as illustrated with normal distributions 402 and 403 illustrated with a dashed line.
- the normal distribution 401 is used to set a threshold for the prediction model. For example, when the standard deviation is represented by ⁇ , a multiple of the standard deviation, such as 2 ⁇ or 3 ⁇ , is set as the threshold. When the residual exceeds the threshold that is set to be 2 ⁇ , an anomaly is detected in anomaly detection. When such a threshold is set, about 95% of the actual values are determined to have no anomaly (be normal). As another exemplary threshold setting, the value of the residual corresponding to a predetermined probability (for example, a highest X percent point or a lowest X percent point) or the absolute value thereof may be set as the threshold.
- a predetermined probability for example, a highest X percent point or a lowest X percent point
- the threshold may be determined by assuming a distribution other than a normal distribution or by a person such as a maintenance person or a driver based on experience thereof.
- deceleration threshold the individual brake threshold, and the train brake threshold can be determined by the above-described method.
- the anomaly detector 150 performs anomaly detection by using various anomaly detection models stored in the model database 102 and travel information stored in the information database 101.
- the anomaly detection may be performed by producing the feature vector for each entry in the table 101b illustrated in FIG. 5 or the table 101a, may be performed by selecting an entry at a constant time interval and producing the feature vector from the selected entry, or may be performed by producing the feature vector from entries for a constant duration.
- the anomaly detection may be performed by producing the feature vector from an entry at a time specified by, for example, a maintenance person, or entries in a duration specified by the maintenance person.
- the anomaly detector 150 performs the anomaly detection of the deceleration performance, the anomaly detection of each air brake, and the anomaly detection of the train brake.
- the feature vector (for example, control command values) is generated from travel information used in the anomaly detection, and a deceleration is predicted by using the generated feature vector and the deceleration model.
- the residual between the predicted deceleration and the actual deceleration (acquired from the table 101b, for example) is compared with the deceleration threshold. When the residual is equal to or smaller than the deceleration threshold, the deceleration performance is determined to be normal. When the residual is larger than the deceleration threshold, the deceleration performance is determined to be anomalous.
- the feature vector (for example, control command values) is generated from travel information used in the anomaly detection, and the air brake pressure is predicted by using the generated feature vector and the air brake pressure model.
- the residual between the predicted air brake pressure and the actual air brake pressure (acquired from the table 101b, for example) is compared with the individual brake threshold. When the residual is equal to or smaller than the individual brake threshold, the air brake is determined to be normal. When the residual is larger than the individual brake threshold, the air brake is determined to be anomalous.
- the feature vector (for example, control command values) is generated from travel information used in the anomaly detection, and the sum of the air brake pressures of a plurality of air brakes is predicted by using the generated feature vector and the train brake model.
- the residual between the predicted air brake pressure sum and the actual air brake pressure sum is compared with the train brake threshold. When the residual is equal to or smaller than the train brake threshold, the train brake is determined to be normal. When the residual is larger than the train brake threshold, the train brake is determined to be anomalous.
- the following describes a specific exemplary operation of the deceleration performance anomaly detection by the anomaly detector 150.
- FIG. 9 is a diagram for description of the exemplary operation by the anomaly detector 150.
- An upper part of FIG. 9 illustrates the brake notch.
- a middle part thereof illustrates the brake deceleration.
- a lower part thereof illustrates the residual between the actual value and the predicted value of the prediction model.
- the brake notch corresponds to an explanatory variable, and the deceleration corresponds to the objective variable.
- each air brake applies braking force to the vehicle. Accordingly, the deceleration of the vehicle increases and thereafter stays near a constant value for a while.
- the predicted value of the deceleration and the measured value (actual value) thereof have a slight difference therebetween but transition substantially at the same value, and the residual between the predicted value and the actual value is smaller than the deceleration threshold.
- the residual exceeds the deceleration threshold at three timings of time t2, t3, and t4, and the anomaly detector 150 detects an anomaly at each timing.
- each air brake further reduces the braking force applied to the vehicle, and accordingly, the deceleration of the vehicle further decreases.
- the residual is within the range of the deceleration threshold, and thus no anomaly is detected.
- the anomaly detection of the air brake of each vehicle and the anomaly detection of the train brake can be performed in similar manners.
- the anomaly detector 150 stores information in the detection result database 103 based on the anomaly detection result of the deceleration performance, the anomaly detection result of the air brake, and the anomaly detection result of the train brake.
- FIG. 10 illustrates an exemplary detection result database 103.
- This detection result database 103 stores, in a temporally sequential manner for a particular train, the brake notch, the anomaly detection result of the deceleration performance, the anomaly detection result of the air brake of each vehicle, and the anomaly detection result of the train brake.
- the anomaly detection result in any of the first to sixth entries indicates no anomaly, but an anomaly is detected at air brake 1 in the seventh and eighth entries.
- the alarm 170 transmits an anomaly notification message to the terminal 400 used by a railway operator, a driver, or a maintenance person.
- the predetermined anomaly may be optionally defined as, for example, an anomaly detected in the deceleration performance, an anomaly detected in a certain number of air brakes, or an anomaly detected in the train brake.
- the message notification may be performed by transmission of an electronic mail, display of a pop-up message on an operation screen of the terminal 400, or notification by predetermined instrument management protocol, or may be performed by any other means.
- the notification includes detailed information of an anomaly (for example, a place (current place) on a map where the anomaly occurred, or an identifier of a vehicle to which the anomaly occurred). An operator or a maintenance person can know the detection of the anomaly and details thereof by receiving the notification.
- the diagnoser 160 performs vehicle diagnosis based on the detection result database 103 and the diagnosis rule database 104.
- the diagnosis rule database 104 holds diagnosis rule data that defines a diagnosis result for each combination of a result of anomaly detection of each air brake (brake device), a result of anomaly detection of the deceleration performance, and a result of anomaly detection of the train brake.
- FIG. 11 illustrates an exemplary diagnosis rule database 104.
- diagnosis rules having diagnosis rule numbers 1 to 8, respectively.
- Each circle in FIG. 11 means that an anomaly detection result indicates no anomaly.
- Each cross in FIG. 11 means that an anomaly detection result indicates an anomaly.
- the diagnosis rule 1 defines a diagnosis result when all results of anomaly detection of air brakes 1 to N indicate no anomaly, the anomaly detection result of the train brake indicates no anomaly, and the anomaly detection result of the deceleration performance indicates no anomaly. Specifically, the diagnosis result of the diagnosis rule 1 indicates a normal state.
- the diagnosis rule 2 defines a diagnosis result when all results of anomaly detection of the air brakes 1 to N indicate no anomaly, the anomaly detection result of the train brake indicates no anomaly, and the anomaly detection result of the deceleration performance indicates an anomaly. Specifically, the diagnosis result of the diagnosis rule 2 indicates an anomaly in a brake block, a wheel, or a road surface state.
- the diagnosis rule 3 defines a diagnosis result when all results of anomaly detection of the air brakes 1 to N indicate no anomaly, the anomaly detection result of the train brake indicates an anomaly, and the anomaly detection result of the deceleration performance indicates no anomaly. Specifically, the diagnosis result of the diagnosis rule 3 indicates a sign of degradation of the air brakes as a whole.
- the diagnosis rule 4 defines a diagnosis result when all results of anomaly detection of the air brakes 1 to N indicate no anomaly, the anomaly detection result of the train brake indicates an anomaly, and the anomaly detection result of the deceleration performance indicates an anomaly. Specifically, the diagnosis result of the diagnosis rule 4 indicates an anomaly in the deceleration performance due to degradation of the air brakes as a whole.
- the diagnosis rule 5 defines a diagnosis result when at least one of results of anomaly detection of the air brakes 1 to N indicates an anomaly, the anomaly detection result of the train brake indicates no anomaly, and the anomaly detection result of the deceleration performance indicates no anomaly. Specifically, the diagnosis result of the diagnosis rule 5 indicates degradation of the air brake having an anomaly or a sign thereof.
- the diagnosis rule 6 defines a diagnosis result when at least one of results of anomaly detection of the air brakes 1 to N indicates an anomaly, the anomaly detection result of the train brake indicates no anomaly, and the anomaly detection result of the deceleration performance indicates an anomaly. Specifically, the diagnosis result of the diagnosis rule 6 indicates an anomaly in the deceleration performance, which is attributable to the air brake having an anomaly.
- the diagnosis rule 7 defines a diagnosis result when all results of anomaly detection of the air brakes 1 to N indicate an anomaly, the anomaly detection result of the train brake indicates an anomaly, and the anomaly detection result of the deceleration performance indicates no anomaly. Specifically, the diagnosis result of the diagnosis rule 7 indicates a sign of an anomaly in the deceleration performance due to degradation of the air brakes as a whole.
- the diagnosis rule 8 defines a diagnosis result when all results of anomaly detection of the air brakes 1 to N indicate an anomaly, the anomaly detection result of the train brake indicates an anomaly, and the anomaly detection result of the deceleration performance indicates an anomaly. Specifically, the diagnosis result of the diagnosis rule 8 indicates an anomaly in the deceleration performance due to degradation of the air brakes as a whole.
- a diagnosis rule other than the diagnosis rules 1 to 8 may be defined.
- a diagnosis result may be defined that indicates a sign of an anomaly in the deceleration performance attributable to degradation of the air brakes determined to have an anomaly when the number of air brake anomaly detection results indicating an anomaly is equal to or larger than a predetermined number.
- a diagnosis result may be defined that indicates an anomaly in the deceleration performance attributable to degradation of the air brakes determined to have an anomaly when the number of air brake anomaly detection results indicating an anomaly is equal to or larger than a predetermined number. Any other diagnosis rule may be defined.
- the diagnoser 160 determines which of the diagnosis rules 1 to 8 each entry stored in the detection result database 103 matches, and generates diagnosis output information in accordance with a diagnosis result indicated by a matched diagnosis rule.
- the matching can be made with a plurality of diagnosis rules.
- the diagnoser 160 causes the screen display device 600 to display the generated diagnosis output information.
- no diagnosis output information may be generated nor displayed.
- the diagnoser 160 may calculate error information in accordance with the difference between the predicted value of the deceleration model and the measured value of the deceleration, and output the calculated error information as the diagnosis output information.
- the difference between a braking distance when the deceleration is at the predicted value and a braking distance when the deceleration is at the measured value may be calculated.
- the braking distance is a distance since braking starts until the vehicle stops or until a desired deceleration or speed is reached. This facilitates understanding of the degree of influence on the deceleration by air brake degradation or train brake degradation as compared to a normal case.
- the braking distance difference described above is anomaly influence degree information.
- FIG. 12 illustrates an exemplary display screen (diagnosis result screen) of the diagnosis output information displayed by the screen display device 600.
- This screen displays a result of diagnosis performed for train A.
- the screen display device 600 is installed in a command room for managing and monitoring trains.
- the uppermost part of the diagnosis result screen displays that a diagnosis target train is train A.
- the second part displays the number of a matched diagnosis rule among a plurality of diagnosis rules.
- the third part displays a diagnosis result indicated by the matched diagnosis rule.
- the diagnosis rule 6 is matched, and thus it is displayed that there is an anomaly in the deceleration performance attributable to individual air brake degradation.
- the fourth part displays information specifying the air brake to which the determined anomaly in the deceleration performance is attributable. This air brake can be determined by, for example, specifying an air brake for which an anomaly detection result indicates an anomaly in the detection result database.
- the fifth part displays, as an anomaly influence degree, a difference in the braking distance as compared to a normal case.
- diagnosis output information is exemplary and may be displayed in various formats in accordance with usage.
- the diagnosis output information may be sequentially recorded in a separately prepared database.
- the diagnosis output information may be displayed on the screen display device 600 by a maintenance person or the like selecting a record from this database and performing a display instruction operation.
- diagnosis rules illustrated in FIG. 11 are defined by using the three kinds of air brake, deceleration, and train brake anomaly detection results, but may be defined by using two of these kinds of results.
- diagnosis rules may be defined by using the deceleration anomaly detection result and the air brake anomaly detection result.
- the air brake anomaly detection result and the deceleration anomaly detection result may be combined to define diagnosis rules as illustrated in FIG. 13.
- the train brake anomaly detection result and the deceleration anomaly detection result may be combined to define diagnosis rules as illustrated in FIG. 14.
- the anomaly diagnosis device can perform highly accurate vehicle diagnosis by combining the three kinds of air brake, deceleration, and train brake anomaly detection results or two of these kinds. For example, a sign of an air brake anomaly can be detected based on the diagnosis rule 3, the diagnosis rule 5, or the diagnosis rule 7. In addition, external environment of a vehicle can be specified as a factor when desired deceleration performance (brake performance) cannot be obtained based on the diagnosis rule 2.
- FIG. 15 illustrates a hardware configuration of the anomaly diagnosis device according to the present embodiment.
- the anomaly diagnosis device according to the present embodiment is achieved by a computer device 100.
- the computer device 100 includes a CPU 151, an input interface 152, a display device 153, a communication device 154, a main storage device 155, and an external storage device 156. These components are connected with each other through a bus 157.
- the central processing unit (CPU) 151 executes an anomaly diagnosis program as a computer program on the main storage device 155.
- the anomaly diagnosis program is a computer program that achieves each above-described functional component of the anomaly diagnosis device. Each functional component is achieved by the CPU 151 executing the anomaly diagnosis program.
- the input interface 152 is a circuit for inputting, to the anomaly diagnosis device, an operation signal from an input device such as a keyboard, a mouse, or a touch panel.
- the display device 153 displays data or information output from the anomaly diagnosis device.
- the display device 153 is, for example, a liquid crystal display (LCD), a cathode-ray tube (CRT), or a plasma display (PDP), but is not limited thereto.
- the data or information output from the computer device 100 can be displayed by the display device 153.
- the communication device 154 is a circuit that allows the anomaly diagnosis device to communicate with an external device in a wireless or wired manner. Measurement Information can be input from the external device through the communication device 154. The measurement information input from the external device can be stored in the information database 101.
- the main storage device 155 stores, for example, the anomaly diagnosis program, data necessary for execution of the anomaly diagnosis program, and data generated through execution of the anomaly diagnosis program.
- the anomaly diagnosis program is loaded onto the main storage device 155 and executed.
- the main storage device 155 is, for example, a RAM, a DRAM, or an SRAM, but not limited thereto.
- the information database 101, the model database 102, the detection result database 103, and the diagnosis rule database 104 may be constructed on the main storage device 155.
- the external storage device 156 stores, for example, the anomaly diagnosis program, data necessary for executing the anomaly diagnosis program, and data generated through execution of the anomaly diagnosis program. These program and data are read onto the main storage device 155 at execution of the anomaly diagnosis program.
- the external storage device 156 is, for example, a hard disk, an optical disk, a flash memory, or a magnetic tape, but is not limited thereto.
- the information database 101, the model database 102, the detection result database 103, and the diagnosis rule database 104 may be constructed on the external storage device 156.
- the anomaly diagnosis program may be installed on the computer device 100 in advance or may be stored in a storage medium such as a CD-ROM. Alternatively, the anomaly diagnosis program may be uploaded on the Internet.
- the computer device 100 may include one or a plurality of CPUs 151, one or a plurality of input interfaces 152, one or a plurality of display devices 153, one or a plurality of communication devices 154, and one or a plurality of main storage devices 155, and may be connected with a peripheral instrument such as a printer or a scanner.
- the anomaly diagnosis device may be achieved by the single computer device 100 or may be configured as a system including a plurality of computer devices 100 connected with each other.
- FIG. 16 is a flowchart of diagnosis processing performed in the operation mode according to the embodiment of the present invention.
- the processing of the flowchart illustrated in FIG. 16 may be executed upon a certain operation of a diagnosis target vehicle, may be executed in a constant period, may be executed upon reception of an instruction from a user such as a maintenance person, or may be executed at any other timing.
- the diagnosis target vehicle is assumed to be a vehicle train.
- the anomaly detector 150 acquires travel information (refer to FIGS. 5 and 4) related to the diagnosis target vehicle train from the information database 101.
- the anomaly detector 150 acquires an anomaly detection model related to the diagnosis target vehicle train from the model database 102. Specifically, the anomaly detection model for deceleration, the anomaly detection model for an air brake mounted on each vehicle, and the anomaly detection model for a train brake are acquired.
- the anomaly detection model for an air brake may be provided for each air brake, but in this example, the anomaly detection model is provided in common for a plurality of air brakes.
- the anomaly detection model for deceleration includes the deceleration model and the deceleration threshold.
- the anomaly detection model for an air brake includes the air brake pressure model and the individual brake threshold.
- the anomaly detection model for a train brake includes the train brake model and the train brake threshold.
- the anomaly detector 150 performs anomaly detection by using the information database 101 and the various anomaly detection models stored in the model database 102. Specifically, the anomaly detector 150 generates the feature vector (for example, control command values) for deceleration anomaly detection from the travel information, and predicts the deceleration by using the generated feature vector and the deceleration model. The residual between the predicted deceleration and the actual deceleration is compared with the deceleration threshold. When the residual is equal to or smaller than the deceleration threshold, the deceleration is determined to be normal. When the residual is larger than the deceleration threshold, the deceleration is determined to be anomalous.
- the feature vector for example, control command values
- the anomaly detector 150 also generates the feature vector (for example, control command values) for air brake anomaly detection from the travel information, and predicts the air brake pressure by using the generated feature vector and the air brake pressure model.
- the residual between the predicted air brake pressure and the actual air brake pressure is compared with the individual brake threshold. When the residual is equal to or smaller than the individual brake threshold, the air brake pressure is determined to be normal. When the residual is larger than the individual brake threshold, the air brake pressure is determined to be anomalous.
- the anomaly detector 150 also generates the feature vector (for example, control command values) for train brake anomaly detection from the travel information, and predicts the sum of the air brake pressures of a plurality of air brakes by using the generated feature vector and the train brake model.
- the residual between the predicted air brake pressure sum and the actual air brake pressure sum is compared with the train brake threshold. When the residual is equal to or smaller than the train brake threshold, the sum is determined to be normal. When the residual is larger than the train brake threshold, the sum is determined to be anomalous.
- the diagnoser 160 diagnoses the diagnosis target vehicle train by using the deceleration anomaly detection result, the air brake anomaly detection result, the train brake anomaly detection result, and a plurality of diagnosis rules stored in the diagnosis rule database.
- the diagnoser 160 specifies a diagnosis rule that matches with these anomaly detection results, and determines a diagnosis result indicated by the diagnosis rule.
- the diagnoser 160 generates the diagnosis output information in accordance with the diagnosis result, and displays the diagnosis output information on a screen of the screen display device 600.
- the diagnosis is performed by using the three kinds of air brake, deceleration, and train brake anomaly detection results, but the diagnosis may be performed by using two of these kinds.
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Mechanical Engineering (AREA)
- Valves And Accessory Devices For Braking Systems (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Regulating Braking Force (AREA)
Abstract
Selon des modes de réalisation, la présente invention réalise un diagnostic très précis. Selon un mode de réalisation, un dispositif de diagnostic d'anomalie comprend un détecteur d'anomalie et un élément de diagnostic. Le détecteur d'anomalie effectue une détection d'anomalie de performance de ralentissement d'un véhicule sur la base d'une valeur d'instruction de commande pour un dispositif de frein et d'un modèle de prédiction pour le ralentissement du véhicule. Le détecteur d'anomalie effectue une détection d'anomalie du dispositif de frein sur la base de la valeur d'instruction de commande et d'un modèle de prédiction pour une force de freinage du dispositif de frein. L'élément de diagnostic diagnostique le véhicule sur la base d'un résultat de la détection d'anomalie de la performance de ralentissement et d'un résultat de la détection d'anomalie du dispositif de frein.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201880003331.7A CN109689470B (zh) | 2017-07-14 | 2018-02-26 | 异常诊断装置、异常诊断方法和计算机程序 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-138257 | 2017-07-14 | ||
| JP2017138257A JP6889057B2 (ja) | 2017-07-14 | 2017-07-14 | 情報処理装置、情報処理方法及びコンピュータプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019012730A1 true WO2019012730A1 (fr) | 2019-01-17 |
Family
ID=61656283
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/007060 WO2019012730A1 (fr) | 2017-07-14 | 2018-02-26 | Dispositif de diagnostic d'anomalie, procédé de diagnostic d'anomalie et programme informatique |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP6889057B2 (fr) |
| CN (1) | CN109689470B (fr) |
| TW (1) | TWI691420B (fr) |
| WO (1) | WO2019012730A1 (fr) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110751633A (zh) * | 2019-10-11 | 2020-02-04 | 上海眼控科技股份有限公司 | 基于深度学习的多轴大车制动检测方法、装置、系统 |
| US20210284209A1 (en) * | 2020-03-16 | 2021-09-16 | Kabushiki Kaisha Toshiba | Information processing apparatus and method |
| US20210349132A1 (en) * | 2019-01-11 | 2021-11-11 | Panasonic Intellectual Property Management Co., Ltd. | Diagnosis system, diagnosis method, program, and recording medium |
| CN117078687A (zh) * | 2023-10-17 | 2023-11-17 | 常州海图信息科技股份有限公司 | 基于机器视觉的轨道巡检系统及方法 |
| WO2023248130A1 (fr) * | 2022-06-21 | 2023-12-28 | Faiveley Transport Italia S.P.A. | Procédés de vérification du fonctionnement d'au moins un moyen de freinage d'au moins un véhicule et systèmes de vérification correspondants |
| US11884313B2 (en) | 2018-02-26 | 2024-01-30 | Kyosan Electric Mfg. Co., Ltd. | Railroad equipment state determination apparatus and railroad equipment state determination method |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020132006A (ja) * | 2019-02-21 | 2020-08-31 | 株式会社京三製作所 | 鉄道設備状態判定装置および鉄道設備状態判定方法 |
| JP7230691B2 (ja) * | 2019-05-30 | 2023-03-01 | 株式会社デンソー | 異常検出方法、異常検出装置、及び異常検出システム |
| WO2020261522A1 (fr) * | 2019-06-27 | 2020-12-30 | 三菱電機株式会社 | Appareil de diagnostic de détérioration, système de diagnostic de détérioration et procédé de diagnostic de détérioration |
| WO2021002013A1 (fr) * | 2019-07-04 | 2021-01-07 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | Dispositif de détection d'anomalie et procédé de détection d'anomalie |
| CN112440746A (zh) * | 2019-08-29 | 2021-03-05 | 北京新能源汽车股份有限公司 | 一种车载终端通讯故障的控制方法、装置、系统及车辆 |
| JP7493375B2 (ja) * | 2019-10-23 | 2024-05-31 | 三菱電機株式会社 | 診断システムおよび診断方法 |
| JP7312676B2 (ja) * | 2019-11-13 | 2023-07-21 | ナブテスコ株式会社 | ブレーキ異常判定装置、ブレーキ状態記憶装置、異常判定方法、異常判定プログラム、及びブレーキ制御装置 |
| IT202000002329A1 (it) * | 2020-02-06 | 2021-08-06 | Faiveley Transport Italia Spa | Sistema per la stima di un indice di carico di un veicolo ferroviario |
| IT202000005194A1 (it) * | 2020-03-11 | 2021-09-11 | Faiveley Transport Italia Spa | Sistema di monitoraggio per almeno una pluralità di dispositivi omogenei di almeno un veicolo ferroviario |
| DE112020007013T5 (de) * | 2020-03-30 | 2023-01-19 | Mitsubishi Electric Corporation | Überwachungssystem |
| CN112158237B (zh) * | 2020-09-24 | 2022-07-19 | 交控科技股份有限公司 | 集成tcms和ato功能的深度融合系统和列车 |
| JP7046148B1 (ja) * | 2020-11-26 | 2022-04-01 | 三菱電機株式会社 | 診断システム、診断プログラムおよび診断方法 |
| JP7374382B2 (ja) * | 2021-05-17 | 2023-11-06 | 三菱電機株式会社 | データ蓄積装置、機器監視システムおよびデータ蓄積方法 |
| CN113110399A (zh) * | 2021-05-20 | 2021-07-13 | 三一重机有限公司 | 作业机械故障诊断方法和系统 |
| US20240378928A1 (en) * | 2021-09-06 | 2024-11-14 | Mitsubishi Electric Corporation | Soundness diagnosis apparatus and soundness diagnosis method |
| JP2023096698A (ja) * | 2021-12-27 | 2023-07-07 | 川崎車両株式会社 | 鉄道車両の健全性診断システム及び方法 |
| WO2023243077A1 (fr) * | 2022-06-17 | 2023-12-21 | 三菱電機株式会社 | Dispositif d'évaluation de la solidité, procédé d'évaluation de la solidité et programme d'évaluation de la solidité |
| DE112022007407T5 (de) * | 2022-06-22 | 2025-04-10 | Mitsubishi Electric Corporation | Tatsächliche-verzögerung-erfassungseinrichtung, verschlechterungsunterscheidungseinrichtung, bremssteuerungseinrichtung, tatsächliche-verzögerung-erfassungsverfahren, verschlechterungsunterscheidungsverfahren und bremssteuerungsverfahren |
| CN115946673B (zh) * | 2022-12-28 | 2024-04-19 | 重庆赛力斯凤凰智创科技有限公司 | 一种汽车制动的故障诊断方法、系统、设备和介质 |
| TWI842376B (zh) * | 2023-02-07 | 2024-05-11 | 國立高雄科技大學 | 自動列車防護系統的運轉事件記錄裝置 |
| JPWO2024232019A1 (fr) * | 2023-05-09 | 2024-11-14 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5744707A (en) * | 1996-02-15 | 1998-04-28 | Westinghouse Air Brake Company | Train brake performance monitor |
| WO1999006809A1 (fr) * | 1997-07-29 | 1999-02-11 | Tom Lalor | Procede et appareil pour determiner l'efficacite de freinage d'un vehicule |
| WO2007095401A2 (fr) * | 2006-02-13 | 2007-08-23 | New York Air Brake Corporation | Système et procédé de commande répartie intelligente pour train |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0891206A (ja) * | 1994-09-21 | 1996-04-09 | Hitachi Ltd | ブレーキ異常検知装置 |
| TW200949225A (en) * | 2008-05-21 | 2009-12-01 | Univ Kun Shan | Method for inspecting abnormal conditions of an automatic transmission box |
| JP5254261B2 (ja) * | 2010-02-09 | 2013-08-07 | 株式会社日立製作所 | 車上制御装置 |
| JP2012205332A (ja) * | 2011-03-24 | 2012-10-22 | Hokkaido Railway Co | 車両の監視装置及びこれを用いた車両の監視システム |
| KR20140067108A (ko) * | 2011-09-12 | 2014-06-03 | 콘티넨탈 테베스 아게 운트 코. 오하게 | 시간 정정 센서 시스템 |
| DE102011089653A1 (de) * | 2011-12-22 | 2013-06-27 | Siemens Aktiengesellschaft | Verfahren und Anordnung zum Überwachen eines Bremssystems einer Bremsanordnung eines Schienenfahrzeugs |
| TWI631033B (zh) * | 2012-06-19 | 2018-08-01 | 張福齡 | Vehicle idle speed stop and start and control method for displaying vehicle position |
| JP2013100111A (ja) * | 2013-03-07 | 2013-05-23 | Mitsubishi Electric Corp | 異常原因特定装置、異常原因特定システム、および異常原因特定方法 |
| US9361650B2 (en) * | 2013-10-18 | 2016-06-07 | State Farm Mutual Automobile Insurance Company | Synchronization of vehicle sensor information |
| CN104875772B (zh) * | 2015-05-29 | 2017-01-11 | 南京中车浦镇城轨车辆有限责任公司 | 试验列车定点停车预警制动装置 |
| JP6588814B2 (ja) * | 2015-12-17 | 2019-10-09 | 株式会社東芝 | 異常診断装置及び方法 |
-
2017
- 2017-07-14 JP JP2017138257A patent/JP6889057B2/ja active Active
-
2018
- 2018-02-26 CN CN201880003331.7A patent/CN109689470B/zh active Active
- 2018-02-26 WO PCT/JP2018/007060 patent/WO2019012730A1/fr active Application Filing
- 2018-03-13 TW TW107108344A patent/TWI691420B/zh active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5744707A (en) * | 1996-02-15 | 1998-04-28 | Westinghouse Air Brake Company | Train brake performance monitor |
| WO1999006809A1 (fr) * | 1997-07-29 | 1999-02-11 | Tom Lalor | Procede et appareil pour determiner l'efficacite de freinage d'un vehicule |
| WO2007095401A2 (fr) * | 2006-02-13 | 2007-08-23 | New York Air Brake Corporation | Système et procédé de commande répartie intelligente pour train |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11884313B2 (en) | 2018-02-26 | 2024-01-30 | Kyosan Electric Mfg. Co., Ltd. | Railroad equipment state determination apparatus and railroad equipment state determination method |
| US20210349132A1 (en) * | 2019-01-11 | 2021-11-11 | Panasonic Intellectual Property Management Co., Ltd. | Diagnosis system, diagnosis method, program, and recording medium |
| US11953528B2 (en) * | 2019-01-11 | 2024-04-09 | Panasonic Intellectual Property Management Co., Ltd. | Diagnosis system, diagnosis method, program, and recording medium |
| CN110751633A (zh) * | 2019-10-11 | 2020-02-04 | 上海眼控科技股份有限公司 | 基于深度学习的多轴大车制动检测方法、装置、系统 |
| US20210284209A1 (en) * | 2020-03-16 | 2021-09-16 | Kabushiki Kaisha Toshiba | Information processing apparatus and method |
| US12110047B2 (en) * | 2020-03-16 | 2024-10-08 | Kabushiki Kaisha Toshiba | Information processing apparatus and method |
| WO2023248130A1 (fr) * | 2022-06-21 | 2023-12-28 | Faiveley Transport Italia S.P.A. | Procédés de vérification du fonctionnement d'au moins un moyen de freinage d'au moins un véhicule et systèmes de vérification correspondants |
| CN117078687A (zh) * | 2023-10-17 | 2023-11-17 | 常州海图信息科技股份有限公司 | 基于机器视觉的轨道巡检系统及方法 |
| CN117078687B (zh) * | 2023-10-17 | 2023-12-15 | 常州海图信息科技股份有限公司 | 基于机器视觉的轨道巡检系统及方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| TWI691420B (zh) | 2020-04-21 |
| CN109689470A (zh) | 2019-04-26 |
| JP2019022306A (ja) | 2019-02-07 |
| JP6889057B2 (ja) | 2021-06-18 |
| TW201908181A (zh) | 2019-03-01 |
| CN109689470B (zh) | 2021-06-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2019012730A1 (fr) | Dispositif de diagnostic d'anomalie, procédé de diagnostic d'anomalie et programme informatique | |
| WO2019016996A1 (fr) | Dispositif de détection d'anomalie, procédé de détection d'anomalie et programme informatique | |
| US10571908B2 (en) | Autonomous vehicle failure mode management | |
| US9721399B2 (en) | Vehicle diagnosing apparatus, vehicle diagnosing system, and diagnosing method | |
| CN107045332B (zh) | 用于延迟系统的ecu接地故障隔离设备 | |
| US20150006023A1 (en) | System and method for determination of vheicle accident information | |
| KR102527319B1 (ko) | 철도 차량의 부품 및 운영 환경 특징 벡터 정보 기반의 기계 학습 고장 진단 시스템 및 그 방법 | |
| RU2763414C1 (ru) | Способ и устройство для диагностики и контроля транспортных средств, компонентов транспортных средств и путей движения | |
| US11373518B2 (en) | Method for data collection | |
| JP2011201336A (ja) | 移動体異常判断支援システム | |
| KR20190083029A (ko) | 철도 차량 부품들의 결함을 진단하는 방법 및 장치 | |
| KR20200058132A (ko) | 철도차량 주요부품 및 시스템 진단장치 | |
| KR102334220B1 (ko) | 철도 차량 부품들의 결함을 진단하고 남은 수명을 계산하는 방법 및 장치 | |
| EP3246223B1 (fr) | Dispositif de surveillance d'état, système de surveillance d'état, et train | |
| US20160148447A1 (en) | Method, system and computer-readable recording medium for managing abnormal state of vehicle | |
| US20240169772A1 (en) | Vehicle abnormality detection device and vehicle abnormality detection method | |
| CN105634858A (zh) | 用于检测制动网关性能的测试系统 | |
| CN109625025B (zh) | Btm设备预警系统 | |
| GB2550297A (en) | State monitoring device, state monitoring system and train | |
| JP6619083B2 (ja) | データ統合分析システム | |
| CN109532352A (zh) | 胎压检测方法、装置、车辆及存储介质 | |
| WO2021010074A1 (fr) | Appareil de diagnostic d'équipement, système de diagnostic d'équipement, et procédé de diagnostic d'équipement | |
| KR20220129755A (ko) | 기어박스의 결함을 진단하고 남은 수명을 계산하는 방법 및 장치 | |
| KR102673205B1 (ko) | 대차 주행안전성 예측 장치 및 방법 | |
| CN119636849A (zh) | 城轨车辆牵引安全控制方法、系统、电子设备及存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18711418 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18711418 Country of ref document: EP Kind code of ref document: A1 |