JP2020132006A - 鉄道設備状態判定装置および鉄道設備状態判定方法 - Google Patents
鉄道設備状態判定装置および鉄道設備状態判定方法 Download PDFInfo
- Publication number
- JP2020132006A JP2020132006A JP2019029565A JP2019029565A JP2020132006A JP 2020132006 A JP2020132006 A JP 2020132006A JP 2019029565 A JP2019029565 A JP 2019029565A JP 2019029565 A JP2019029565 A JP 2019029565A JP 2020132006 A JP2020132006 A JP 2020132006A
- Authority
- JP
- Japan
- Prior art keywords
- operation data
- data
- abnormality
- time
- new
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images















Abstract
【課題】転てつ機等の鉄道設備の動作に異常があるか否かを判定することを可能とする新たな技術を提供すること。【解決手段】鉄道設備状態判定装置1は、モータ駆動によって停止状態から既定動作を行った後に再び停止状態となる鉄道設備の既定動作に係る動作データを複数記憶した記憶部300と、記憶部300に記憶された複数の動作データに基づいて、評価基準を設定する評価基準設定部204と、評価基準に基づいて、鉄道設備が新たに既定動作を行ったときの新規動作データが異常か否かを判定する判定部210と、を備える。【選択図】図5
Description
本発明は、鉄道設備の動作に係る状態を判定する鉄道設備状態判定装置等に関する。
鉄道設備の1つである電気転てつ機の転換動作の監視として様々な手法が開発されている。例えば、特許文献1には、サーボモータに付随するエンコーダからモータの回転数に比例した数のパルスを取得するとともにモータの負荷を測定することで、一連の転換動作(転換ストローク)に対するモータのトルク(転換トルク)を表すグラフが得られる点が記載されている。また、一連の転換動作(転換ストローク)に対するモータのトルク(転換トルク)から、転換動作に異常が発生したか否かを判定する技術が記載されている。
しかしながら、転てつ機は、設置場所や、分岐器種別・番数・トングレールの状態・線形などによって、1台1台の転換動作負荷に特徴があり、転換トルクデータが異なる。そのため、結局、保守担当者(ユーザ)が自身の経験や知見を頼りに転てつ機の動作状態を最終チェックする必要があるという考えがある。そうすると、複数の転てつ機に関する画一的な基準をもとに動作状態をチェックするのではなく、1台1台の転てつ機の動作状態をチェックする必要が生じ、膨大な手間が発生することとなる。
なお、転てつ機に限らず、しゃ断かんが昇降動作する踏切しゃ断機や、扉部が開閉動作するホームドア等の他の鉄道設備についても、動作状態の監視には同様の課題が考えられる。
本発明が解決しようとする課題は、転てつ機等の鉄道設備の動作に異常があるか否かを判定することを可能とする新たな技術を提供することである。
上記課題を解決するための第1の発明は、
モータ駆動によって停止状態から既定動作を行った後に再び停止状態となる鉄道設備の前記既定動作に係る動作データを複数記憶した記憶部(例えば、図5の記憶部300,転換動作データ314)と、
前記記憶部に記憶された複数の動作データに基づいて、評価基準を設定する評価基準設定部(例えば、図5の評価基準設定部204)と、
前記評価基準に基づいて、前記鉄道設備が新たに前記既定動作を行ったときの新規動作データが異常か否かを判定する判定部(例えば、図5の判定部210)と、
を備えた鉄道設備状態判定装置(例えば、図5の鉄道設備状態判定装置1)である。
モータ駆動によって停止状態から既定動作を行った後に再び停止状態となる鉄道設備の前記既定動作に係る動作データを複数記憶した記憶部(例えば、図5の記憶部300,転換動作データ314)と、
前記記憶部に記憶された複数の動作データに基づいて、評価基準を設定する評価基準設定部(例えば、図5の評価基準設定部204)と、
前記評価基準に基づいて、前記鉄道設備が新たに前記既定動作を行ったときの新規動作データが異常か否かを判定する判定部(例えば、図5の判定部210)と、
を備えた鉄道設備状態判定装置(例えば、図5の鉄道設備状態判定装置1)である。
第1の発明によれば、モータ駆動によって行われる鉄道設備の既定動作に係る動作データを複数記憶しておき、それら複数の動作データを用いて評価基準を設定することができる。そして、設定した評価基準に基づいて、当該鉄道設備が新たに既定動作を行ったときの新規動作データが異常か否かを判定することができる。これにより、1台1台の鉄道設備に対して評価基準を設定して、当該鉄道設備に対応する評価基準に基づいて当該鉄道設備の規定動作に異常があるか否かを判定するという新たな技術を実現できる。
また、第2の発明は、
前記記憶部は、前記動作データを動作日と対応付けて記憶し、
前記評価基準設定部は、前記新規動作データの動作日から直近所定日数分の前記動作データに基づいて、前記評価基準を設定する、
第1の発明の鉄道設備状態判定装置である。
前記記憶部は、前記動作データを動作日と対応付けて記憶し、
前記評価基準設定部は、前記新規動作データの動作日から直近所定日数分の前記動作データに基づいて、前記評価基準を設定する、
第1の発明の鉄道設備状態判定装置である。
第2の発明によれば、新規動作データが異常か否かを、その直近所定日数分の動作データから設定した評価基準を用いて判定することができる。
また、第3の発明は、
前記動作データは、前記既定動作の動作時間のデータを含み、
前記評価基準設定部は、前記動作データに含まれる動作時間の分布に基づいて、動作時間が異常であると判定するための動作時間閾値条件を前記評価基準の1つとして設定し、
前記判定部は、前記新規動作データに含まれる動作時間が異常か否かを前記動作時間閾値条件に基づいて判定する、
第1又は第2の発明の鉄道設備状態判定装置である。
前記動作データは、前記既定動作の動作時間のデータを含み、
前記評価基準設定部は、前記動作データに含まれる動作時間の分布に基づいて、動作時間が異常であると判定するための動作時間閾値条件を前記評価基準の1つとして設定し、
前記判定部は、前記新規動作データに含まれる動作時間が異常か否かを前記動作時間閾値条件に基づいて判定する、
第1又は第2の発明の鉄道設備状態判定装置である。
対象の鉄道設備に何らかの異常が発生すると、その動作時間は長くなる傾向がある。第3の発明によれば、過去の動作データから、その動作時間の分布に基づいて動作時間閾値条件を設定することができる。そして、設定した動作時間閾値条件に基づいて、新規動作データの動作時間が異常か否かを判定することができる。
また、第4の発明は、
前記動作データは、前記既定動作の動作時間のデータを含み、
前記判定部は、
前記新規動作データに含まれる動作時間、および、前記新規動作データに係る既定動作の前までの所定数の前記動作データに含まれる動作時間の分布に基づいて、前記新規動作データに関する動作時間異常度を算出することと、
前記動作時間異常度が所与の動作時間異常閾値条件を満たすか否かに基づいて、前記新規動作データが異常か否かを判定することと、
を行い、
前記評価基準設定部は、過去に算出された前記動作時間異常度に基づいて、前記動作時間異常閾値条件を前記評価基準の1つとして設定する、
第1〜第3の何れかの発明の鉄道設備状態判定装置である。
前記動作データは、前記既定動作の動作時間のデータを含み、
前記判定部は、
前記新規動作データに含まれる動作時間、および、前記新規動作データに係る既定動作の前までの所定数の前記動作データに含まれる動作時間の分布に基づいて、前記新規動作データに関する動作時間異常度を算出することと、
前記動作時間異常度が所与の動作時間異常閾値条件を満たすか否かに基づいて、前記新規動作データが異常か否かを判定することと、
を行い、
前記評価基準設定部は、過去に算出された前記動作時間異常度に基づいて、前記動作時間異常閾値条件を前記評価基準の1つとして設定する、
第1〜第3の何れかの発明の鉄道設備状態判定装置である。
第4の発明によれば、新規動作データの動作時間、およびそれ以前の既定動作に係る動作データの動作時間の分布に基づいて、新規動作データに関する動作時間異常度を算出することができる。また、過去の動作データに関する動作時間異常度に基づいて、動作時間異常閾値条件を設定することができる。そして、算出した動作時間異常度が動作時間異常閾値条件を満たすか否かによって、新規動作データが異常か否かを判定することができる。これによれば、過去の鉄道設備の動作データから動作時間異常閾値条件が設定されるため、ユーザが当該条件を設定する必要がない。
また、第5の発明は、
前記動作データは、前記既定動作に要した電気量のデータを含み、
前記評価基準設定部は、前記動作データに含まれる電気量の分布に基づいて、電気量が異常であると判定するための電気量閾値条件を前記評価基準の1つとして設定し、
前記判定部は、前記新規動作データに含まれる電気量が異常か否かを前記電気量閾値条件に基づいて判定する、
第1又は第2の発明の鉄道設備状態判定装置である。
前記動作データは、前記既定動作に要した電気量のデータを含み、
前記評価基準設定部は、前記動作データに含まれる電気量の分布に基づいて、電気量が異常であると判定するための電気量閾値条件を前記評価基準の1つとして設定し、
前記判定部は、前記新規動作データに含まれる電気量が異常か否かを前記電気量閾値条件に基づいて判定する、
第1又は第2の発明の鉄道設備状態判定装置である。
対象の鉄道設備に何らかの異常が発生すると動作時間は長くなる傾向があるため、電気量も増加傾向を示す。第5の発明によれば、過去の動作データから、その電気量の分布に基づいて電気量閾値条件を設定することができる。そして、設定した電気量閾値条件に基づいて、新規動作データの電気量が異常か否かを判定することができる。
また、第6の発明は、
前記動作データは、前記既定動作に要した電気量のデータを含み、
前記判定部は、
前記新規動作データに含まれる電気量、および、前記新規動作データに係る既定動作の前までの所定数の前記動作データに含まれる電気量の分布に基づいて、前記新規動作データに関する電気量異常度を算出することと、
前記電気量異常度が所与の電気量異常閾値条件を満たすか否かに基づいて、前記新規動作データが異常か否かを判定することと、
を行い、
前記評価基準設定部は、過去に算出された前記電気量異常度に基づいて、前記電気量異常閾値条件を前記評価基準の1つとして設定する、
第1、第2、又は第5の発明の鉄道設備状態判定装置である。
前記動作データは、前記既定動作に要した電気量のデータを含み、
前記判定部は、
前記新規動作データに含まれる電気量、および、前記新規動作データに係る既定動作の前までの所定数の前記動作データに含まれる電気量の分布に基づいて、前記新規動作データに関する電気量異常度を算出することと、
前記電気量異常度が所与の電気量異常閾値条件を満たすか否かに基づいて、前記新規動作データが異常か否かを判定することと、
を行い、
前記評価基準設定部は、過去に算出された前記電気量異常度に基づいて、前記電気量異常閾値条件を前記評価基準の1つとして設定する、
第1、第2、又は第5の発明の鉄道設備状態判定装置である。
第6の発明によれば、新規動作データの電気量、およびそれ以前の既定動作に係る動作データの電気量の分布に基づいて、新規動作データに関する電気量異常度を算出することができる。また、過去の動作データに関する電気量異常度に基づいて、電気量異常閾値条件を設定することができる。そして、算出した電気量異常度が電気量異常閾値条件を満たすか否かによって、新規動作データが異常か否かを判定することができる。これによれば、過去の鉄道設備の動作データから電気量異常閾値条件が設定されるため、ユーザが当該条件を設定する必要がない。
また、第7の発明は、
前記鉄道設備は、転てつ機、踏切しゃ断機およびホームドアのうちの何れかである、
第1〜第6の何れかの発明の鉄道設備状態判定装置である。
前記鉄道設備は、転てつ機、踏切しゃ断機およびホームドアのうちの何れかである、
第1〜第6の何れかの発明の鉄道設備状態判定装置である。
第7の発明によれば、鉄道設備である転てつ機、踏切しゃ断機、ホームドアの何れかを対象に、その動作データについて異常か否かを判定することができる。
また、第8の発明は、
モータ駆動によって停止状態から既定動作を行った後に再び停止状態となる鉄道設備の前記既定動作に係る動作データを蓄積したデータに基づいて、評価基準を設定する評価基準設定ステップと、
前記評価基準に基づいて、前記鉄道設備が新たに前記既定動作を行ったときの新規動作データが異常か否かを判定する判定ステップと、
を含む鉄道設備状態判定方法である。
モータ駆動によって停止状態から既定動作を行った後に再び停止状態となる鉄道設備の前記既定動作に係る動作データを蓄積したデータに基づいて、評価基準を設定する評価基準設定ステップと、
前記評価基準に基づいて、前記鉄道設備が新たに前記既定動作を行ったときの新規動作データが異常か否かを判定する判定ステップと、
を含む鉄道設備状態判定方法である。
第8の発明によれば、第1の発明と同様の効果を奏する鉄道設備状態判定方法を実現できる。
以下、図面を参照して本発明の好適な実施形態について説明する。なお、以下に説明する実施形態によって本発明が限定されるものではなく、本発明を適用可能な形態が以下の実施形態に限定されるものでもない。また、図面の記載において、同一要素には同一符号を付す。
〔第1実施形態〕
先ず、第1実施形態について説明する。本実施形態では、「モータ駆動によって停止状態から既定動作を行った後に再び停止状態となる鉄道設備」として転てつ機を例示し、「既定動作」を転てつ機の転換動作として説明する。
先ず、第1実施形態について説明する。本実施形態では、「モータ駆動によって停止状態から既定動作を行った後に再び停止状態となる鉄道設備」として転てつ機を例示し、「既定動作」を転てつ機の転換動作として説明する。
[システム構成]
図1は、本実施形態の鉄道設備状態判定装置1の適用例である。鉄道設備状態判定装置1は、例えば、鉄道設備を集中監視する鉄道設備監視システムの1つの装置或いは中央装置の一機能として実現され、鉄道設備である転てつ機10毎に、通信回線を介して取得した当該転てつ機10に関する計測データをもとに、異常兆候の有無といった状態を判定する。
図1は、本実施形態の鉄道設備状態判定装置1の適用例である。鉄道設備状態判定装置1は、例えば、鉄道設備を集中監視する鉄道設備監視システムの1つの装置或いは中央装置の一機能として実現され、鉄道設備である転てつ機10毎に、通信回線を介して取得した当該転てつ機10に関する計測データをもとに、異常兆候の有無といった状態を判定する。
転てつ機10は、動力源として電気モータ12を用いる電気転てつ機であり、主要構成として、電気モータ12と、クラッチ14と、転換歯車群16と、可動部である動作かん18とを有する。転てつ機10は、電気モータ12の回転出力を、クラッチ14で転換歯車群16へ伝達し、転換歯車群16によって転換機構を駆動させるのに適切なトルクに変換させ、転換機構による動作かん18の変位動作である直動運動によってトングレールを転換移動させて分岐器を定位/反位に転換動作させ、トングレールを基本レールに密着させるといった、一連の転換動作を行う。
転てつ機10に関する計測データとして、電気モータ12の電圧(モータ電圧)および電流(モータ電流)と、動作かん18の変位位置であるストローク位置とが計測される。これらの計測データは、転てつ機10に取り付けられたセンサ20によって計測され、当該転てつ機10の近傍に設置された制御端末50(図12参照)によって収集され、任意のタイミングで鉄道設備状態判定装置1へ送信される。センサ20(22,24,26)は、転てつ機10に外付けとしてもよいし、内蔵されるとしてもよい。
モータ電圧およびモータ電流は、電気モータ12の駆動電圧および駆動電流を計測する電圧電流センサ22によって計測される。ストローク位置は、直動運動する動作かん18の移動量を光学的に検知するセンサ26によって計測されるとしてもよいし、或いは、転換歯車群16が有する歯車の回転量を検出する光学式或いは磁気式のセンサ24の検出値をストローク値に換算して求めることにしてもよい。
[判定原理]
状態判定は、転てつ機10の1回毎の転換動作に係る動作データに基づいて行う。本実施形態では、転換動作中の動作かんのストローク位置を各タイミングとした、当該各タイミングにおける電気モータ12の駆動情報を示す駆動推移情報を動作データとして用いる。この駆動推移情報は、転てつ機10に関する計測データから作成する。
状態判定は、転てつ機10の1回毎の転換動作に係る動作データに基づいて行う。本実施形態では、転換動作中の動作かんのストローク位置を各タイミングとした、当該各タイミングにおける電気モータ12の駆動情報を示す駆動推移情報を動作データとして用いる。この駆動推移情報は、転てつ機10に関する計測データから作成する。
転てつ機10の一連の転換動作は、鎖錠されて動作かん18が停止状態にある状態において、電気モータ12の回転を開始して鎖錠機構を解錠する期間である解錠工程と、転換機構が動作かん18を駆動してトングレールを基本レールに接するまで転換した後、トングレールの先端を基本レールに密着させる期間である転換工程と、鎖錠機構を鎖錠して動作かん18が停止状態となり、電気モータ12の動作を停止する期間である鎖錠工程と、からなる。
本実施形態では、動作データとして取り出す転換動作の開始から終了までの期間は転換工程とするが、解錠工程や鎖錠工程を含むこととしてもよい。同一の転てつ機10であれば、1回の転換動作に係る動作データの期間の長さ、つまり、転換工程の期間の長さは一定となる。転換工程の開始および終了は、ストローク位置から判断することができる。つまり、転換工程の開始は、ストローク位置が変位し始めた時点であり、転換工程の終了は、ストローク位置の変位が終了した時点となる。また、ストローク位置の変位方向から、転換方向(反位・定位)を判断することができる。
動作データとする駆動推移情報は、図2に一例を示すように、転換動作の開始から終了までの期間におけるストローク位置毎のトルクの推移を示すデータである。例えば、各ストローク位置に対するモータ電圧およびモータ電流からトルクを求め、得られた各ストローク位置に対するトルクのデータを駆動推移情報とする。その作成に用いる計測データ(モータ電圧、モータ電流、ストローク位置)は、計測対象毎に別個のセンサ20(22,24,26)によって得られるが、何れも計測時刻に対する計測値として得られるため、計測時刻を基準として互いに対応付けることができる。
図3は、転てつ機10の状態判定を説明する図である。本実施形態における転てつ機10の状態判定では、予め、転てつ機10毎に、過去の動作データが蓄積記憶されているものとする。ある転てつ機10が新たに転換動作を行ったときの動作データ(駆動推移情報)を新規動作データとして作成したら、統計値推移情報と、総合異常度閾値条件とを評価基準として設定する。そして、評価基準に基づき新規動作データが異常か否かの判定を行って、対象の転てつ機10の状態を判定する。
統計値推移情報は、過去の複数の動作データの駆動推移情報に基づいて、その転換動作中の各ストローク位置における駆動情報を統計演算することで求めた、統計値の推移を示す。例えば先ず、同じ転てつ機10の過去の動作データのうち、転換方向が同一であって、動作日が当該新規動作データの動作日から直近所定日数以内である動作データを抽出する。そして、抽出した各動作データの駆動推移情報に基づいて、各ストローク位置におけるトルクの平均値μの平均値データと、各ストローク位置におけるトルクの標準偏差σの標準偏差データとを算出して、統計値推移情報とする。具体的には、転換動作の開始から終了までの期間(本実施形態では転換工程の開始から終了までの期間)のストローク位置毎に、過去の動作データそれぞれにおけるトルクの平均値μを求めて平均値データを作成し、ストローク位置毎に、過去の動作データそれぞれにおける標準偏差σを求めて標準偏差データを作成する。
総合異常度閾値条件は、新規動作データが異常であると判定するための条件であり、「所定の総合異常度判定閾値を超えていること」等とすることができる。
そして、状態判定にあたっては先ず、新規動作データの駆動推移情報と、統計値推移情報の平均値データおよび標準偏差データのそれぞれとを各ストローク位置で比較演算することによって、新規動作データに関する異常度の推移を算出する。つまり、転換動作の開始から終了までの期間のストローク位置i毎に、次式(1)に従って異常度a(i)を求める。
a(i)=((xi−μi)/σi)^2 ・・・(1)
a(i)=((xi−μi)/σi)^2 ・・・(1)
式(1)において、「xi」は、新規動作データにおけるストローク位置iのトルクであり、「μi」は、平均値データにおけるストローク位置iのトルクの平均値であり、「σi」は、標準偏差データにおけるストローク位置iの標準偏差である。
その後、異常度の推移に基づいて、転換動作の開始から終了までの期間の各ストローク位置iの異常度a(i)の総計を算出し、総合異常度とする。そして、この総合異常度が総合異常度閾値条件を満たすか否かに基づいて、新規動作データが異常か否かを判定する。
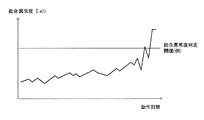
図4は、総合異常度の推移の一例であり、動作回数に対する総合異常度のグラフ、つまり、総合異常度の時系列の推移を示している。例えば、新規動作データについて求めた総合異常度が総合異常度判定閾値を超えている場合に総合異常度閾値条件を満たすとして、新規動作データを異常と判定する。
また、総合異常度を総合異常度判定閾値と比較することにより、対象の転てつ機10の異常兆候の有無といった当該転てつ機10の状態を判定する。すなわち、本実施形態では、1回の転換動作毎に、総合異常度が求められる。そして、総合異常度を求める際は、前回の転換動作に係る動作データをも含めた過去の動作データから統計値推移情報が設定され、今回の転換動作に係る新規動作データの駆動推移情報と比較されて、今回の総合異常度が算出される。通常、転てつ機は、転換動作を繰り返すことで徐々に摩耗等が進んでゆくが、その進行は非常にゆっくりである。そのため、図4に示すように、長期間に亘る総合異常度の推移としてみると、総合異常度が徐々に大きくなる傾向によって、保守作業等のメンテナンスの時期を推測・把握することができる。また、図4では示されていないが、保守作業の前後の総合異常度の推移から、当該保守作業によって正常状態に戻ったか、十分な整備がなされたかの確認の目安とすることもできる。そして、この総合異常度の推移から、例えば、未来の総合異常度の推移を予測して保守作業の実施に役立てたり、或いは、異常判定に用いる総合異常度判定閾値(総合異常度閾値条件)を適切に設定するといったことが可能となる。
[機能構成]
図5は、第1実施形態における鉄道設備状態判定装置1の機能構成図である。図5に示すように、鉄道設備状態判定装置1は、操作部102と、表示部104と、音出力部106と、通信部108と、処理部200と、記憶部300とを備え、一種のコンピュータとして構成することができる。
図5は、第1実施形態における鉄道設備状態判定装置1の機能構成図である。図5に示すように、鉄道設備状態判定装置1は、操作部102と、表示部104と、音出力部106と、通信部108と、処理部200と、記憶部300とを備え、一種のコンピュータとして構成することができる。
操作部102は、例えばボタンスイッチやタッチパネル、キーボード等の入力装置で実現され、なされた操作に応じた操作信号を処理部200に出力する。表示部104は、例えばLCDやタッチパネル等の表示装置で実現され、処理部200からの表示信号に応じた各種表示を行う。音出力部106は、例えばスピーカ等の音声出力装置で実現され、処理部200からの音声信号に応じた各種音出力を行う。通信部108は、例えば有線或いは無線による通信装置で実現され、各転てつ機10の近傍に設置された制御端末50(図12参照)との通信を行う。
処理部200は、例えばCPU(Central Processing Unit)等の演算装置で実現され、記憶部300に記憶されたプログラムやデータ等に基づいて、鉄道設備状態判定装置1を構成する各部への指示やデータ転送を行い、鉄道設備状態判定装置1の全体制御を行う。また、処理部200は、記憶部300に記憶された鉄道設備状態判定プログラム302を実行することで、動作データ作成部202、評価基準設定部204、閾値決定部206、および判定部210の各機能ブロックとして機能する。但し、これらの機能ブロックは、ASIC(Application Specific Integrated Circuit)やFPGA(Field Programmable Gate Array)等によってそれぞれ独立した演算回路として構成することも可能である。
動作データ作成部202は、転てつ機10に関する計測データをもとに、当該転てつ機10の1回分の転換動作に係る動作データを作成する。本実施形態では、転換動作の開始から終了までの期間におけるストローク位置毎のトルクの推移を示す駆動推移情報を作成し、これを動作データとする(図2参照)。具体的には、転てつ機10に関する計測データであるモータ電圧、モータ電流およびストローク位置は、何れも計測時刻に対する計測値として得られるので、計測時刻を基準として互いに対応付けることができる。そのため、各ストローク位置に対するモータ電圧およびモータ電流からトルクを求めることで、ストローク位置に対するトルクのデータを作成する。次いで、ストローク位置の変化から、転換動作の開始および終了(本実施形態では転換工程の開始および終了)のタイミングを判定する。そして、ストローク位置に対するトルクのデータのうち、転換動作の開始から終了までの期間のデータを取り出して駆動推移情報とし、1回の転換動作に係る動作データを得る。また、ストローク位置の変化から、当該転換動作の転換方向を判定する。
評価基準設定部204は、統計値推移情報と、総合異常度閾値条件とを評価基準として設定する。具体的には、ある転てつ機10についての新規動作データに対する評価基準とするための統計値推移情報の設定に際して、先ず、当該転てつ機10の同一転換方向の過去の動作データのうちから、動作日が直近所定日数分(例えば、3日間や10日間)の動作データを抽出する。また、転てつ機10の転換動作に関する動作データは、保守作業の前後で大きく変化し得る。そのため、動作日時が、過去直近の保守作業の実施日時以降の動作データのみを抽出対象としてもよい。そして、転換動作の開始から終了までの期間のストローク位置毎に、抽出した各動作データのトルクの平均値μおよび標準偏差σを求め、平均値データおよび標準偏差データを作成して、統計値推移情報とする(図3参照)。
また、評価基準設定部204は、別途閾値決定部206によって決定された総合異常度判定閾値に従って総合異常度閾値条件を設定する。そして、閾値決定部206は、総合異常度閾値条件を定める総合異常度判定閾値を決定する。
具体的には、閾値決定部206は、対象の転てつ機10についての過去の状態判定の結果である総合異常度の時系列の推移を求め、これに基づいて総合異常度判定閾値を決定する。或いは、過去の総合異常度を、その動作データの転換動作時の状況で分類する。例えば、月や季節といった期間、昼間や夜間といった時間帯、温度や湿度といった動作環境、晴れや雨といった気象等の複数の状況によって分類する。そして、それらの分類毎に総合異常度の時系列の推移を求め、当該分類毎に総合異常度判定閾値を決定する。この場合、評価基準設定部204は、新規動作データの転換動作時の状況に対して所定の近似条件を満たす分類の総合異常度判定閾値を用いて総合異常度閾値条件を設定し、判定部210は、評価基準設定部204が設定した総合異常度閾値条件に従って状態判定を行う。近似条件は、転換動作時の状況が同じ、或いは、似ているとみなせる条件である。具体的には、期間や時間帯、動作環境、気象等の複数の状況のうち、全てが一致することという条件に設定することもできるし、これらの内の一部の状況が一致することという条件に設定することもできる。例えば、期間が同じ“1月”である、季節および時間帯が同じ“夏の昼間”である、気象および温度が同じ“晴れで20度以上”である、といった条件が挙げられる。また、総合異常度の時系列の推移(図4参照)を、例えば、表示部104に表示する等によってユーザに提示し、操作部102によるユーザの操作指示に従って、総合異常度判定閾値を設定するようにしてもよい。
判定部210は、異常度推移算出部212と、総合異常度算出部214と、状態判定部216と、を含む。
異常度推移算出部212は、動作データ作成部202によって作成された新規動作データの駆動推移情報と、評価基準設定部204によって設定された統計値推移情報とを、転換動作の開始から終了までの各ストローク位置で比較演算することによって、新規動作データに関する異常度の推移を算出する。具体的には、各ストローク位置iの異常度a(i)を、式(1)に従って算出することで、異常度の推移を算出する(図3参照)。
総合異常度算出部214は、異常度推移算出部212によって算出された異常度の推移を総合して、総合異常度を算出する。つまり、転換動作の開始から終了までの各ストローク位置iの異常度a(i)の総計を算出し、総合異常度とする(図3参照)。
状態判定部216は、総合異常度算出部214によって算出された総合異常度が、評価基準設定部204によって設定された総合異常度閾値条件を満たすか否かに基づいて新規動作データが異常か否かを判定し、転てつ機10の状態を判定する。具体的には、総合異常度が総合異常度判定閾値を超えており総合異常度閾値条件を満たす場合は、新規動作データを異常と判定する。また、総合異常度を総合異常度判定閾値と比較することで、転てつ機10の状態として異常兆候の有無を判定する。
記憶部300は、ハードディスクやROM、RAM等の記憶装置で実現され、処理部200が鉄道設備状態判定装置1を統合的に制御するためのプログラムやデータ等を記憶しているとともに、処理部200の作業領域として用いられ、処理部200が各種プログラムに従って実行した演算結果や、操作部102や通信部108を介した入力データ等が一時的に格納される。本実施形態では、記憶部300には、鉄道設備状態判定プログラム302と、転てつ機データ310と、特徴データ330と、が記憶される。また、転てつ機データ310において判定結果データ316は、総合異常度を格納する。したがって、この記憶部300は、総合異常度記憶部ともいえる。
転てつ機データ310は、転てつ機10毎に生成され、当該転てつ機10を識別する転てつ機ID312に対応付けて、転換動作データ314と、判定結果データ316と、閾値データ318と、保守作業履歴データ320と、を格納している。
転換動作データ314は、当該転てつ機10が行った1回の転換動作に関するデータであり、動作データ作成部202によって作成された動作データを、その転換動作時の状況を表す付随情報とともに格納する。具体的には、図6に示すように、転換動作データ314には、転換動作を識別する動作データNo.に対応付けて、当該転換動作を行った動作日時(日付および時刻)と、転換方向と、気温や湿度等の動作環境情報と、晴れや雨といった天候等の気象情報と、当該転換動作に係る動作データ(本実施形態では駆動推移情報)と、を格納している。
判定結果データ316は、当該転てつ機10の動作データに対する状態判定の結果に関するデータであり、図7に示すように、該当する動作データの動作データNo.と、評価基準として用いた統計値推移情報の統計値推移情報IDと、異常度の推移と、総合異常度と、判定結果と、を格納している。
閾値データ318は、閾値決定部206によって決定された総合異常度判定閾値のデータを含み、転てつ機10毎にその総合異常度判定閾値を格納する。
保守作業履歴データ320は、当該転てつ機10に対して実施された保守作業の履歴であり、保守作業の実施日時と、実施した保守作業の内容とを対応付けて格納している。
特徴データ330は、評価基準設定部204によって設定された統計値推移情報に関するデータであり、図8に示すように、当該統計値推移情報を識別する統計値推移情報IDおよび対象の転てつ機10を識別する転てつ機IDに対応付けて、採用動作データリストと、統計値推移情報である平均値データおよび標準偏差データと、を格納している。採用動作データリストは、当該統計値推移情報の作成に用いた過去の動作データの動作データNo.のリストである。
[処理の流れ]
図9は、鉄道設備状態判定処理の流れを説明するフローチャートである。ここで説明する処理は、処理部200が記憶部300から鉄道設備状態判定プログラム302を読み出して実行することで実現でき、転てつ機10のそれぞれを対象として並列的に実行する。
図9は、鉄道設備状態判定処理の流れを説明するフローチャートである。ここで説明する処理は、処理部200が記憶部300から鉄道設備状態判定プログラム302を読み出して実行することで実現でき、転てつ機10のそれぞれを対象として並列的に実行する。
先ず、動作データ作成部202が、対象の転てつ機10に関する計測データをもとに、新たな転換動作に係る動作データ(新規動作データ)を作成する(ステップS1)。本実施形態では、転換動作の開始から終了までの期間におけるストローク位置毎のトルクのデータを駆動推移情報として作成し、動作データとする。
次いで、評価基準設定部204が、新規動作データ(駆動推移情報)に対する評価基準とするための統計値推移情報と、総合異常度の評価基準とするための総合異常度閾値条件とを設定する(ステップS3)。具体的には、対象の転てつ機10の過去の動作データに基づいて統計値推移情報を作成するとともに、別途閾値決定部206によって決定された対象の転てつ機10についての総合異常度判定閾値を閾値データ318から読み出して、総合異常度閾値条件を設定する。
次いで、異常度推移算出部212が、新規動作データの駆動推移情報と、設定された統計値推移情報との比較演算を行い、転換動作の開始から終了までの期間における各ストローク位置iの異常度a(i)を算出して、新規動作データに関する異常度の推移を算出する(ステップS5)。
そして、総合異常度算出部214が、算出された異常度の推移における各ストローク位置の異常度a(i)を総計して、総合異常度を算出する(ステップS7)。その後、状態判定部216が、算出された総合異常度をもとに、総合異常度閾値条件を用いて対象の転てつ機10の状態を判定する(ステップS9)。具体的には、総合異常度が総合異常度閾値条件を満たすか否かに基づいて新規動作データが異常か否かを判定するとともに、総合異常度を総合異常度閾値条件の総合異常度判定閾値と比較し、対象の転てつ機10の状態として異常予兆の有無を判定する。以上の処理を行うと、ステップS1に戻り、同様の処理を繰り返す。
[作用効果]
第1実施形態によれば、鉄道設備の新たな転換動作に係る新規動作データの駆動推移情報と、過去の動作データに基づく統計値推移情報とをストローク位置毎に比較演算することで、新規動作データに関する転換動作中の異常度の推移を算出し、その異常度の推移を総合して当該転換動作に係る総合異常度を算出する。そのため、鉄道設備である転てつ機10の1回分の転換動作全体を総合異常度という1つのパラメータによって判定することができるようになる。したがって、僅かな異常ではあるが1回分の転換動作全体に亘って異常があるような場合や、瞬間的に値が大きくなるような異常の場合等、どのような異常であっても、総合異常度という1つのパラメータで転てつ機10の動作に異常があるか否かを判定することができる。1台1台の鉄道設備に対して評価基準を設定して、当該鉄道設備に対応する評価基準に基づいて当該鉄道設備の規定動作に異常があるか否かを判定するという新たな技術を実現できる。
第1実施形態によれば、鉄道設備の新たな転換動作に係る新規動作データの駆動推移情報と、過去の動作データに基づく統計値推移情報とをストローク位置毎に比較演算することで、新規動作データに関する転換動作中の異常度の推移を算出し、その異常度の推移を総合して当該転換動作に係る総合異常度を算出する。そのため、鉄道設備である転てつ機10の1回分の転換動作全体を総合異常度という1つのパラメータによって判定することができるようになる。したがって、僅かな異常ではあるが1回分の転換動作全体に亘って異常があるような場合や、瞬間的に値が大きくなるような異常の場合等、どのような異常であっても、総合異常度という1つのパラメータで転てつ機10の動作に異常があるか否かを判定することができる。1台1台の鉄道設備に対して評価基準を設定して、当該鉄道設備に対応する評価基準に基づいて当該鉄道設備の規定動作に異常があるか否かを判定するという新たな技術を実現できる。
〔第2実施形態〕
転てつ機10には、例えば構造上の理由或いは設置位置の余裕空間上の理由等から、動作かん18のストローク位置を計測できない場合があり得る。そのような場合を想定し、第2実施形態では、駆動推移情報と、その転換動作の動作時間と、を動作データとする。
転てつ機10には、例えば構造上の理由或いは設置位置の余裕空間上の理由等から、動作かん18のストローク位置を計測できない場合があり得る。そのような場合を想定し、第2実施形態では、駆動推移情報と、その転換動作の動作時間と、を動作データとする。
先ず、駆動推移情報は、第1実施形態と同様に転換動作中の各タイミングにおける電気モータ12の駆動情報を示すが、本実施形態では、転換動作における動作かんの変位開始から変位終了までの時間経過を、各タイミングとする。同一の転てつ機10ならば、転換工程の前工程である解錠工程、および後工程である鎖錠工程の各期間の長さは、何れの転換動作においてもほぼ一定である。そこで、1回の転換動作に係る電気モータ12の回転開始時刻から転換工程の開始時刻を求め、当該電気モータ12の回転終了時刻から転換工程の終了時刻を求める。そして、求めた転換工程の開始時刻から終了時刻までの時間経過に対するトルクのデータを、駆動推移情報として作成する。その後は、第1実施形態の状態判定を適用すればよい。
ただし、転換工程の期間の長さ、つまり、転換動作の開始から終了までの時間は変化し得るため、第2実施形態では、転換工程の期間の長さ(転換工程の開始時刻から終了時刻までの時間長)を転換動作の動作時間として、動作データに含める。そして、新規動作データの状態判定に先立ち、その動作時間に基づいて、当該新規動作データが正常か否かを判定する事前選別を行う。事前選別の結果正常と判断した場合は、上述の状態判定を適用する。
そして、事前選別では、新規動作データの動作時間が異常か否かを、動作時間閾値条件に基づいて判定する。動作時間閾値条件は、動作時間が異常であると判定するための条件であり、事前選別に先立ち評価基準として設定する。
具体的には、図10に示すように、新規動作データと同一の転てつ機10に係る動作データであって、転換方向が同じ過去の動作データの中から、当該動作データについての事前選別でその動作時間Tが正常と判定された直近所定日数以内の所定数の動作データを抽出する。そして、抽出した各動作データの動作時間Tの対数log(T)の平均値μlog(T)、および、標準偏差σlog(T)を求める。次いで、この平均値μlog(T)および標準偏差σlog(T)を用いて、新規動作データの動作時間Tの対数log(T)の偏差値を求める。そして、この偏差値を所定の動作時間判定閾値と比較することで事前選別を行い、新規動作データの動作時間Tが異常か否かを判定する。動作時間判定閾値は、図11に示すように定めることができる。つまり、平均値μlog(T)を中心とした範囲の上限値および下限値として動作時間判定閾値を定め、その範囲外であることを動作時間閾値条件とする。そして、新規動作データについての偏差値が範囲外の場合に、動作時間閾値条件を満たすとして異常と判定する。範囲内ならば、動作時間閾値条件を満たさないとして正常と判定する。
そして、事前選別で正常と判定した動作データの駆動推移情報について、動作時間が所定の正規化時間となるように時間軸を正規化した後、上述の状態判定を適用する。その際、駆動推移情報は時間経過に対するトルクのデータであるので、ストローク位置の替わりに、各時刻iにおける異常度a(i)を算出することになる。
第2実施形態では、鉄道設備状態判定装置1において動作データ作成部202が、転換工程の開始時刻から終了時刻までの時間経過に対するトルクのデータを駆動推移情報として作成するとともに、開始時刻から終了時刻までの時間長をその転換動作の動作時間として算出し、これらを動作データとする。また、評価基準設定部204が、統計値推移情報と、総合異常度閾値条件と、動作時間閾値条件とを評価基準として設定する。そして、判定部210が、状態判定に先立ち、新規動作データの動作時間が動作時間閾値条件を満たすか否かを判定する事前選別を行う。
なお、第1実施形態および第2実施形態では鉄道設備状態判定装置1が行うとして説明した駆動推移情報の作成は、制御端末50が行う構成としてもよい。具体的には、図1では図示を省略したが、図12に示すように、転てつ機10の近傍には、その電気モータ12に対する回転開始および回転終了の指示を行って転換動作を制御する制御端末50が、それぞれ設置されている。そして、この制御端末50において、センサ20(22,24,26)の計測データを収集している。そのため、制御端末50が計測データから駆動推移情報を作成し、鉄道設備状態判定装置1へ送信する構成も可能である。その場合は、制御端末50が転換動作毎に計測データを処理して動作データを作成する必要があるが、その分鉄道設備状態判定装置1の処理負荷を低減できる。また、制御端末50から鉄道設備状態判定装置1への計測データそのものの送信が不要となるため、伝送するデータ量を低減できる。
また、第2実施形態では鉄道設備状態判定装置1が作成するとして説明した動作データのうち、駆動推移情報については鉄道設備状態判定装置1で作成し、動作時間については制御端末50が求めるとしてもよい。例えば、制御端末50が、電気モータ12に対して回転開始を指示した時刻および回転終了を指示した時刻と、解錠工程および鎖錠工程の各期間の長さとから転換工程の期間の長さを算出し、動作時間として鉄道設備状態判定装置1へ送信する構成としてもよい。
また、第1実施形態および第2実施形態では、動作データとするモータの駆動情報をトルクとしたが、モータ電流を用いてもよい。
〔第3実施形態〕
次に、第3実施形態について説明する。第3実施形態の鉄道設備状態判定装置は、図5に示した鉄道設備状態判定装置1と同様の構成で実現できるが、処理部の各機能部において行う処理の一部が異なる。以下では、相違部分に着目して各機能部が行う処理を説明する。
次に、第3実施形態について説明する。第3実施形態の鉄道設備状態判定装置は、図5に示した鉄道設備状態判定装置1と同様の構成で実現できるが、処理部の各機能部において行う処理の一部が異なる。以下では、相違部分に着目して各機能部が行う処理を説明する。
図13は、第3実施形態における鉄道設備状態判定装置1bの機能構成図である。図13に示すように、鉄道設備状態判定装置1bは、操作部102と、表示部104と、音出力部106と、通信部108と、処理部200bと、記憶部300bとを備え、一種のコンピュータとして構成することができる。
処理部200bは、記憶部300bに記憶された鉄道設備状態判定プログラム302bを実行することで、動作データ作成部202b、評価基準設定部204b、閾値決定部206b、および動作時間判定部210bの各機能ブロックとして機能する。
第3実施形態では、動作データを、その転換動作の動作時間とする。そして、当該動作時間をもとに、転てつ機10の状態判定を行う。そのために、第3実施形態では、動作データ作成部202bが、第2実施形態と同じ要領で制御端末50が求めた動作時間を取得し、新規動作データとする。また、評価基準設定部204bが、動作時間閾値条件と、動作時間異常閾値条件とを評価基準として設定する。そして、動作時間判定部210bが、事前選別の結果正常と判定された新規動作データに関する動作時間異常度を算出し、この動作時間異常度が動作時間異常閾値条件を満たすか否かによって、新規動作データが異常か否かを判定する。
また、閾値決定部206bが、動作時間異常閾値条件を定める動作時間異常判定閾値を決定する。動作時間異常判定閾値は、第1実施形態の総合異常度判定閾値と同様の要領で決定することができる。例えば、対象の転てつ機10についての過去の状態判定の結果である動作時間異常度の時系列の推移を求め、これに基づいて動作時間異常判定閾値を決定する。或いは、対象の転てつ機10に係る過去の動作時間異常度をその動作データの転換動作時の状況で分類し、分類毎に動作時間異常度の時系列の推移を求めることで、当該分類毎に動作時間異常判定閾値を決定しておく構成でもよい。その他、ユーザの操作指示に従って動作時間異常判定閾値を決定するようにしてもよい。
図14は、第3実施形態の鉄道設備状態判定装置1bが行う鉄道設備状態判定処理の流れを説明するフローチャートである。先ず、動作データ作成部202bが、制御端末50から新たな転換動作の動作時間を取得し、新規動作データとする(ステップS11)。
次いで、評価基準設定部204bが、第2実施形態で説明した事前選別を行うための動作時間閾値条件と、新規動作データ(動作時間)に対する評価基準とするための動作時間異常閾値条件とを設定する(ステップS12)。動作時間異常閾値条件については、別途閾値決定部206bによって決定された動作時間異常判定閾値に基づき設定する。
その後、動作時間判定部210bは、取得された新規動作データの動作時間が動作時間閾値条件を満たすか否かを判定する事前選別を行う(ステップS13)。そして、動作時間閾値条件を満たす場合は(ステップS14:YES)、当該新規動作データの動作時間を異常と判定して(ステップS15)、ステップS11に戻る。一方、動作時間閾値条件を満たさない場合には(ステップS14:NO)、ステップS16に移行する。
そして、ステップS16では、動作時間判定部210bは、新規動作データの動作時間、および当該新規動作データに係る転換動作前までの所定数の動作データに含まれる動作時間の分布に基づいて、動作時間異常度を算出する。例えば、事前選別において求めた新規動作データの動作時間TNの対数log(TN)の偏差値から、新規動作データの動作時間異常度を得る。すなわち、過去の動作データの中から所定数の動作データを抽出し、動作時間Tの対数log(T)の平均値μlog(T)、および、標準偏差σlog(T)を求める。そして、次式(2)に従って、動作時間異常度a2を算出する。
a2=(log(TN)−μlog(T))/σlog(T) ・・・(2)
a2=(log(TN)−μlog(T))/σlog(T) ・・・(2)
なお、次式(3)に従って動作時間異常度a3を求める構成でもよい。式(3)において、「μT」は、抽出した過去の各動作データの動作時間Tの平均値であり、「σT」は、当該各動作データの動作時間Tの標準偏差である。また、動作時間異常度a2と動作時間異常度a3の両方を求めて、各値に基づき後段の状態判定を行う構成も可能である。その場合は、例えば、両者の閾値を含む動作時間異常閾値条件を設定しておく。
a3=(TN−μT)/σT ・・・(3)
a3=(TN−μT)/σT ・・・(3)
そして、動作時間判定部210bは、算出された動作時間異常度をもとに、動作時間異常閾値条件を用いて対象の転てつ機10の状態を判定する(ステップS17)。具体的には、新規動作データの動作時間異常度a2(或いは動作時間異常度a3)が動作時間異常閾値条件を満たすか否かに基づいて、新規動作データが異常か否かを判定する。例えば、図15に示すように、動作時間異常度a2が動作時間異常判定閾値を超えている場合に動作時間異常閾値条件を満たすとして、新規動作データを異常と判定する。また、図15に示す動作時間異常度a2の推移から対象の転てつ機10の異常兆候の有無等の状態を判定する。例えば、動作時間異常度a2の変化傾向からメンテナンスの時期を推測したり、メンテナンス前後の動作時間異常度a2の推移から整備が適切になされたかの確認をするといったことが可能となる。以上の処理を行うと、ステップS11に戻り、同様の処理を繰り返す。
なお、動作時間閾値条件に基づく事前選別(図14のステップS13)は行わない構成としてもよい。その場合は、ステップS12での動作時間閾値条件の設定は不要となる。
第3実施形態によれば、動作時間閾値条件に基づき新規動作データの動作時間が異常か否かを先ず判定し、動作時間が明らかに異常である新規動作データの事前選別を行うことができる。その上で、事前選別の結果正常と判定された場合に、当該新規動作データの動作時間、およびその転換動作以前の過去の転換動作の動作時間の分布に基づいて、新規動作データに関する動作時間異常度という1つのパラメータを算出することができる。また、過去の動作データに関する動作時間異常度を用いて、動作時間異常判定閾値を決定しておくことができる。そして、動作時間異常度を動作時間異常判定閾値と比較することで新規動作データが異常か否かを判定するとともに、その転換動作を行った転てつ機10の異常兆候の有無といった状態判定を行うことができる。したがって、第1実施形態等と比べて簡易に状態判定を行うことができ、鉄道設備状態判定装置1bにおける処理負荷の軽減が図れる。
また、第3実施形態によれば、鉄道設備状態判定装置1bは、制御端末50から転換動作の動作時間を収集し、これを動作データとして蓄積しておくこととなる。したがって、鉄道設備状態判定装置1bにおいて動作データを蓄積しておくための記憶容量は、第1実施形態等と比べて小容量で済む。加えて、制御端末50から鉄道設備状態判定装置1bへ伝送するデータ量を大幅に低減でき、転送路の伝送容量に制限がある場合にも適用が可能である。
〔第4実施形態〕
次に、第4実施形態について説明する。第4実施形態の鉄道設備状態判定装置は、図5に示した鉄道設備状態判定装置1と同様の構成で実現できるが、処理部の各機能部において行う処理の一部が異なる。以下では、相違部分に着目して各機能部が行う処理を説明する。
次に、第4実施形態について説明する。第4実施形態の鉄道設備状態判定装置は、図5に示した鉄道設備状態判定装置1と同様の構成で実現できるが、処理部の各機能部において行う処理の一部が異なる。以下では、相違部分に着目して各機能部が行う処理を説明する。
第4実施形態では、動作データを、その転換動作に要した電気量のデータとする。そして、当該電気量をもとに、転てつ機10の状態判定を行う。そのために、第4実施形態では、制御端末50が、転てつ機10の新たな転換動作に際し、当該転換動作に要した電気量を算出して鉄道設備状態判定装置1c(図16を参照)へ送信する。電気量は、転換動作の開始から終了までの期間において電圧電流センサ22によって計測されたモータ電流の平均値(平均電流値)に、当該期間の時間(動作時間)を乗じて求める。或いは、転換動作の開始から終了までの期間に計測されたモータ電流の最大値(最大電流値)に、動作時間を乗じて電気量を求めるとしてもよい。或いは、転換動作の開始から終了までの期間に所定時間間隔で周期的に計測されたモータ電流それぞれを積算することで電気量を求めることとしてもよい。また、モータ電圧の平均値又は最大値に動作時間を乗じた値を、電気量の代わりのエネルギーデータとして用いてもよい。
なお、この電気量の算出は、鉄道設備状態判定装置1cにおいて動作データ作成部202c(図16を参照)が行うようにしてもよい。その場合は、制御端末50は、第1実施形態と同様の要領でモータ電流を計測データとして鉄道設備状態判定装置1cへ送信する。
図16は、第4実施形態における鉄道設備状態判定装置1cの機能構成図である。図16に示すように、鉄道設備状態判定装置1cは、操作部102と、表示部104と、音出力部106と、通信部108と、処理部200cと、記憶部300cとを備え、一種のコンピュータとして構成することができる。
処理部200cは、記憶部300cに記憶された鉄道設備状態判定プログラム302cを実行することで、動作データ作成部202c、評価基準設定部204c、閾値決定部206c、および電気量判定部210cの各機能ブロックとして機能する。
そして、動作データ作成部202cが、制御端末50が求めた電気量を取得して新規動作データとする。また、評価基準設定部204cが、電気量閾値条件と、電気量異常閾値条件とを評価基準として設定する。そして、電気量判定部210cが、事前選別の結果正常と判定された新規動作データに関する電気量異常度を算出し、この電気量異常度が電気量異常閾値条件を満たすか否かによって、新規動作データが異常か否かを判定する。
また、閾値決定部206cが、電気量異常閾値条件を定める電気量異常判定閾値を決定する。電気量異常判定閾値は、第1実施形態の総合異常度判定閾値と同様の要領で決定することができる。例えば、対象の転てつ機10についての過去の状態判定の結果である電気量異常度の時系列の推移を求め、これに基づいて決定する。或いは、対象の転てつ機10に係る過去の電気量異常度をその動作データの転換動作時の状況で分類し、分類毎に電気量異常度の時系列の推移を求めることで、当該分類毎に電気量異常判定閾値を決定しておく構成でもよい。その他、ユーザの操作指示に従って電気量異常判定閾値を決定するようにしてもよい。
図17は、第4実施形態の鉄道設備状態判定装置1cが行う鉄道設備状態判定処理の流れを説明するフローチャートである。先ず、動作データ作成部202cが、制御端末50から新たな転換動作の電気量を取得し、新規動作データとする(ステップS21)。
次いで、評価基準設定部204cが、事前選別を行うための電気量閾値条件と、新規動作データ(電気量)に対する評価基準とするための電気量異常閾値条件とを設定する(ステップS22)。電気量異常閾値条件については、別途閾値決定部206cによって決定された電気量異常判定閾値に基づき設定する。
その後、電気量判定部210cが、取得された新規動作データの電気量が電気量閾値条件を満たすか否かを判定する事前選別を行う(ステップS23)。例えば先ず、同じ転てつ機10の過去の動作データであって、転換方向が同じ過去の動作データの中から、当該動作データについての事前選別でその電気量Eが正常と判定された直近所定日数以内の所定数の動作データを抽出する。そして、抽出した各動作データの電気量Eの対数log(E)の平均値μlog(E)、および、標準偏差σlog(E)を求める。次いで、この平均値μlog(E)および標準偏差σlog(E)を用いて、新規動作データの電気量Eの対数log(E)の偏差値を求める。そして、この偏差値を所定の電気量判定閾値と比較することで事前選別を行い、新規動作データの電気量Eが異常か否かを判定する。電気量判定閾値は、図11を参照して説明した動作時間判定閾値と同様に定めることができる。つまり、平均値μlog(E)を中心とした範囲の上限値および下限値として電気量判定閾値を定め、その範囲外であることを電気量閾値条件とする。
そして、電気量判定部210cは、新規動作データについての偏差値が範囲外の場合は電気量閾値条件を満たすとして(ステップS24:YES)、当該新規動作データの電気量を異常と判定し(ステップS25)、ステップS21に戻る。
一方、偏差値が範囲内であり電気量閾値条件を満たさない場合には(ステップS24:NO)、ステップS26に移行する。
そして、ステップS26では、電気量判定部210cは、新規動作データの電気量、および当該新規動作データに係る転換動作前までの所定数の動作データに含まれる電気量の分布に基づいて、電気量異常度を算出する。例えば、事前選別において求めた新規動作データの電気量ENの対数log(EN)の偏差値から、新規動作データの電気量異常度を得る。すなわち、次式(4)に従って、電気量異常度a4を算出する。
a4=(log(EN)−μlog(E))/σlog(E) ・・・(4)
a4=(log(EN)−μlog(E))/σlog(E) ・・・(4)
なお、次式(5)に従って電気量異常度a5を求める構成でもよい。式(5)において、「μE」は、抽出した過去の各動作データの電気量Eの平均値であり、「σE」は、当該各動作データの電気量Eの標準偏差である。また、電気量異常度a4と電気量異常度a5の両方を求めて、各値に基づき後段の状態判定を行う構成も可能である。その場合は、例えば、両者の閾値を含む電気量異常閾値条件を設定しておく。
a5=(EN−μE)/σE ・・・(5)
a5=(EN−μE)/σE ・・・(5)
そして、電気量判定部210cは、算出された電気量異常度をもとに、電気量異常閾値条件を用いて対象の転てつ機10の状態を判定する(ステップS27)。具体的には、新規動作データの電気量異常度a4(或いは電気量異常度a5)が電気量異常閾値条件を満たすか否かに基づいて、新規動作データが異常か否かを判定する。例えば、電気量異常度a4が電気量異常判定閾値を超えている場合に電気量異常閾値条件を満たすとして、新規動作データを異常と判定する。また、電気量異常度a4の推移から対象の転てつ機10の異常兆候の有無等の状態を判定する。例えば、電気量異常度a4の増加傾向からメンテナンスの時期を推測したり、メンテナンス前後の電気量異常度a4の推移から整備が適切になされたかの確認をするといったことが可能となる。以上の処理を行うと、ステップS21に戻り、同様の処理を繰り返す。
なお、電気量閾値条件に基づく事前選別(図17のステップS23)は行わない構成としてもよい。その場合は、ステップS22での電気量閾値条件の設定は不要となる。
第4実施形態によれば、電気量閾値条件に基づき新規動作データの電気量が異常か否かを先ず判定し、電気量が明らかに異常である新規動作データの事前選別を行うことができる。その上で、事前選別の結果正常と判定された場合に、当該新規動作データの電気量、およびその転換動作以前の過去の転換動作の電気量の分布に基づいて、新規動作データに関する電気量異常度という1つのパラメータを算出することができる。また、過去の動作データに関する電気量異常度を用いて、電気量異常判定閾値を決定しておくことができる。そして、電気量異常度を電気量異常判定閾値と比較することで新規動作データが異常か否かを判定するとともに、その転換動作を行った転てつ機10の異常兆候の有無といった状態判定を行うことができる。したがって、第1実施形態等と比べて簡易に状態判定を行うことができ、鉄道設備状態判定装置1cにおける処理負荷の軽減が図れる。
また、第4実施形態によれば、鉄道設備状態判定装置1cは、制御端末50から転換動作の電気量を収集し、これを動作データとして蓄積しておくこととなる。したがって、鉄道設備状態判定装置1cにおいて動作データを蓄積しておくための記憶容量は、第1実施形態等と比べて小容量で済む。加えて、制御端末50から鉄道設備状態判定装置1cへ伝送するデータ量を大幅に低減でき、転送路の伝送容量に制限がある場合にも適用が可能である。
なお、上述の各実施形態では、鉄道設備を転てつ機として説明したが、例えば、踏切しゃ断機、ホームドアといった、モータを動力源として可動部が動作を行う他の鉄道設備ついても、同様に適用可能である。踏切しゃ断機の場合、昇降するしゃ断かんが可動部に相当し、ホームドアの場合、開閉する扉部が可動部に相当する。
1,1b,1c…鉄道設備状態判定装置
200,200b,200c…処理部
202,202b,202c…動作データ作成部
204,204b,204c…評価基準設定部
206,206b,206c…閾値決定部
210…判定部
212…異常度推移算出部
214…総合異常度算出部
216…状態判定部
210b…動作時間判定部
210c…電気量判定部
300,300b,300c…記憶部
302,302b,302c…鉄道設備状態判定プログラム
310…転てつ機データ
330…特徴データ
10…転てつ機
20(22,24,26)…センサ
50…制御端末
200,200b,200c…処理部
202,202b,202c…動作データ作成部
204,204b,204c…評価基準設定部
206,206b,206c…閾値決定部
210…判定部
212…異常度推移算出部
214…総合異常度算出部
216…状態判定部
210b…動作時間判定部
210c…電気量判定部
300,300b,300c…記憶部
302,302b,302c…鉄道設備状態判定プログラム
310…転てつ機データ
330…特徴データ
10…転てつ機
20(22,24,26)…センサ
50…制御端末
Claims (8)
- モータ駆動によって停止状態から既定動作を行った後に再び停止状態となる鉄道設備の前記既定動作に係る動作データを複数記憶した記憶部と、
前記記憶部に記憶された複数の動作データに基づいて、評価基準を設定する評価基準設定部と、
前記評価基準に基づいて、前記鉄道設備が新たに前記既定動作を行ったときの新規動作データが異常か否かを判定する判定部と、
を備えた鉄道設備状態判定装置。 - 前記記憶部は、前記動作データを動作日と対応付けて記憶し、
前記評価基準設定部は、前記新規動作データの動作日から直近所定日数分の前記動作データに基づいて、前記評価基準を設定する、
請求項1に記載の鉄道設備状態判定装置。 - 前記動作データは、前記既定動作の動作時間のデータを含み、
前記評価基準設定部は、前記動作データに含まれる動作時間の分布に基づいて、動作時間が異常であると判定するための動作時間閾値条件を前記評価基準の1つとして設定し、
前記判定部は、前記新規動作データに含まれる動作時間が異常か否かを前記動作時間閾値条件に基づいて判定する、
請求項1又は2に記載の鉄道設備状態判定装置。 - 前記動作データは、前記既定動作の動作時間のデータを含み、
前記判定部は、
前記新規動作データに含まれる動作時間、および、前記新規動作データに係る既定動作の前までの所定数の前記動作データに含まれる動作時間の分布に基づいて、前記新規動作データに関する動作時間異常度を算出することと、
前記動作時間異常度が所与の動作時間異常閾値条件を満たすか否かに基づいて、前記新規動作データが異常か否かを判定することと、
を行い、
前記評価基準設定部は、過去に算出された前記動作時間異常度に基づいて、前記動作時間異常閾値条件を前記評価基準の1つとして設定する、
請求項1〜3の何れか一項に記載の鉄道設備状態判定装置。 - 前記動作データは、前記既定動作に要した電気量のデータを含み、
前記評価基準設定部は、前記動作データに含まれる電気量の分布に基づいて、電気量が異常であると判定するための電気量閾値条件を前記評価基準の1つとして設定し、
前記判定部は、前記新規動作データに含まれる電気量が異常か否かを前記電気量閾値条件に基づいて判定する、
請求項1又は2に記載の鉄道設備状態判定装置。 - 前記動作データは、前記既定動作に要した電気量のデータを含み、
前記判定部は、
前記新規動作データに含まれる電気量、および、前記新規動作データに係る既定動作の前までの所定数の前記動作データに含まれる電気量の分布に基づいて、前記新規動作データに関する電気量異常度を算出することと、
前記電気量異常度が所与の電気量異常閾値条件を満たすか否かに基づいて、前記新規動作データが異常か否かを判定することと、
を行い、
前記評価基準設定部は、過去に算出された前記電気量異常度に基づいて、前記電気量異常閾値条件を前記評価基準の1つとして設定する、
請求項1,2又は5に記載の鉄道設備状態判定装置。 - 前記鉄道設備は、転てつ機、踏切しゃ断機およびホームドアのうちの何れかである、
請求項1〜6の何れか一項に記載の鉄道設備状態判定装置。 - モータ駆動によって停止状態から既定動作を行った後に再び停止状態となる鉄道設備の前記既定動作に係る動作データを蓄積したデータに基づいて、評価基準を設定する評価基準設定ステップと、
前記評価基準に基づいて、前記鉄道設備が新たに前記既定動作を行ったときの新規動作データが異常か否かを判定する判定ステップと、
を含む鉄道設備状態判定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019029565A JP2020132006A (ja) | 2019-02-21 | 2019-02-21 | 鉄道設備状態判定装置および鉄道設備状態判定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019029565A JP2020132006A (ja) | 2019-02-21 | 2019-02-21 | 鉄道設備状態判定装置および鉄道設備状態判定方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020132006A true JP2020132006A (ja) | 2020-08-31 |
Family
ID=72277513
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019029565A Pending JP2020132006A (ja) | 2019-02-21 | 2019-02-21 | 鉄道設備状態判定装置および鉄道設備状態判定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2020132006A (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3008097U (ja) * | 1994-06-23 | 1995-03-07 | 帝都高速度交通営団 | 転てつ機動作監視装置 |
| JP2002209303A (ja) * | 2001-01-11 | 2002-07-26 | Hitachi Ltd | モノレールの保守管理システム |
| JP2005186822A (ja) * | 2003-12-26 | 2005-07-14 | Railway Technical Res Inst | 設備機器の動作状況監視システムとその動作状況監視プログラム |
| JP2016084076A (ja) * | 2014-10-28 | 2016-05-19 | 公益財団法人鉄道総合技術研究所 | 転てつ機の動作状態の監視方法および監視装置 |
| JP2017040085A (ja) * | 2015-08-19 | 2017-02-23 | 株式会社日立製作所 | モノレール用分岐器 |
| JP2019022306A (ja) * | 2017-07-14 | 2019-02-07 | 株式会社東芝 | 異常診断装置、異常診断方法およびコンピュータプログラム |
-
2019
- 2019-02-21 JP JP2019029565A patent/JP2020132006A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3008097U (ja) * | 1994-06-23 | 1995-03-07 | 帝都高速度交通営団 | 転てつ機動作監視装置 |
| JP2002209303A (ja) * | 2001-01-11 | 2002-07-26 | Hitachi Ltd | モノレールの保守管理システム |
| JP2005186822A (ja) * | 2003-12-26 | 2005-07-14 | Railway Technical Res Inst | 設備機器の動作状況監視システムとその動作状況監視プログラム |
| JP2016084076A (ja) * | 2014-10-28 | 2016-05-19 | 公益財団法人鉄道総合技術研究所 | 転てつ機の動作状態の監視方法および監視装置 |
| JP2017040085A (ja) * | 2015-08-19 | 2017-02-23 | 株式会社日立製作所 | モノレール用分岐器 |
| JP2019022306A (ja) * | 2017-07-14 | 2019-02-07 | 株式会社東芝 | 異常診断装置、異常診断方法およびコンピュータプログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2019163887A1 (ja) | 鉄道設備状態判定装置および鉄道設備状態判定方法 | |
| CN108459568B (zh) | 数据收集装置以及计算机可读介质 | |
| KR101880353B1 (ko) | 엘리베이터의 고장 예측 시스템 | |
| CN107614217B (zh) | 故障诊断装置及故障诊断方法 | |
| EP1233898B1 (en) | Light rail vehicle having predictive diagnostic system for motor driven automated doors | |
| KR101453301B1 (ko) | 선로 전환기의 모니터링 시스템 및 방법 | |
| EP2217519B1 (en) | Adaptation of transport system parameters | |
| CN110498310A (zh) | 轿厢位置确定装置以及轿厢位置确定方法 | |
| Letot et al. | A data driven degradation-based model for the maintenance of turnouts: A case study | |
| CN113391621B (zh) | 一种电动仿真测试转台的健康状态评估方法 | |
| JP5274605B2 (ja) | 電気転てつ機および携帯端末、転換状態管理装置 | |
| WO2016199210A1 (ja) | データ収集システムおよび方法、計測データ量の削減方法 | |
| JP7308717B2 (ja) | ホームドア診断装置、ホームドアシステム、及びホームドア診断プログラム | |
| CN101258087B (zh) | 用于改进电梯系统的性能的方法和系统 | |
| JP2020132006A (ja) | 鉄道設備状態判定装置および鉄道設備状態判定方法 | |
| KR102400948B1 (ko) | 로봇의 원격 감시 시스템 | |
| JP2005073478A (ja) | 機器監視装置及び機器監視システム | |
| JP6160705B2 (ja) | 電力需給ガイダンス装置および電力需給ガイダンス方法 | |
| EP3502029B1 (en) | Method for maintenance of a transportation device, software program, and controller | |
| JP7454086B1 (ja) | 転てつ機保守支援装置 | |
| JP7218053B2 (ja) | ホーム柵情報管理装置 | |
| JP7454085B1 (ja) | 転てつ機保守支援装置 | |
| JP2018144714A (ja) | 転てつ器保守管理システムおよび転てつ器保守管理方法 | |
| CN114358400B (zh) | 一种智慧桥隧涵边坡监控系统 | |
| EP4105751A2 (en) | Abnormality detection system and abnormality detection method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220114 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20221116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221122 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20230523 |