WO2018190041A1 - 信号分離装置及び信号分離方法 - Google Patents
信号分離装置及び信号分離方法 Download PDFInfo
- Publication number
- WO2018190041A1 WO2018190041A1 PCT/JP2018/008953 JP2018008953W WO2018190041A1 WO 2018190041 A1 WO2018190041 A1 WO 2018190041A1 JP 2018008953 W JP2018008953 W JP 2018008953W WO 2018190041 A1 WO2018190041 A1 WO 2018190041A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- signal
- unit
- determination
- output
- determination signal
- Prior art date
Links
Images














Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B1/00—Details of transmission systems, not covered by a single one of groups H04B3/00 - H04B13/00; Details of transmission systems not characterised by the medium used for transmission
- H04B1/06—Receivers
- H04B1/10—Means associated with receiver for limiting or suppressing noise or interference
- H04B1/1027—Means associated with receiver for limiting or suppressing noise or interference assessing signal quality or detecting noise/interference for the received signal
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B10/00—Transmission systems employing electromagnetic waves other than radio-waves, e.g. infrared, visible or ultraviolet light, or employing corpuscular radiation, e.g. quantum communication
- H04B10/11—Arrangements specific to free-space transmission, i.e. transmission through air or vacuum
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B10/00—Transmission systems employing electromagnetic waves other than radio-waves, e.g. infrared, visible or ultraviolet light, or employing corpuscular radiation, e.g. quantum communication
- H04B10/25—Arrangements specific to fibre transmission
- H04B10/2581—Multimode transmission
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B10/00—Transmission systems employing electromagnetic waves other than radio-waves, e.g. infrared, visible or ultraviolet light, or employing corpuscular radiation, e.g. quantum communication
- H04B10/60—Receivers
- H04B10/66—Non-coherent receivers, e.g. using direct detection
- H04B10/69—Electrical arrangements in the receiver
- H04B10/697—Arrangements for reducing noise and distortion
- H04B10/6971—Arrangements for reducing noise and distortion using equalisation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04J—MULTIPLEX COMMUNICATION
- H04J14/00—Optical multiplex systems
- H04J14/04—Mode multiplex systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04J—MULTIPLEX COMMUNICATION
- H04J14/00—Optical multiplex systems
- H04J14/06—Polarisation multiplex systems
Abstract
信号受信装置は、複数の受信信号から特定の信号を分離する少なくとも1つの信号分離装置を備える。少なくとも1つの信号分離装置のそれぞれは、少なくとも1つの等化信号を分離する空間フィルタリング部と、等化信号を判定して第1の判定信号を生成し、生成された第1の判定信号を出力する判定信号出力部とを備える。空間フィルタリング部は、複数の受信信号、および、判定信号出力部から出力される第1の判定信号または他の信号分離装置から出力される第2の判定信号のいずれかのうち、少なくとも複数の受信信号と、所定の重み係数とを乗算することによって、少なくとも1つの等化信号を分離する。
Description
本発明は、信号を分離する技術に関する。
本願は、2017年4月13日に日本へ出願された特願2017-079870号に基づいて優先権を主張し、その内容をここに援用する。
本願は、2017年4月13日に日本へ出願された特願2017-079870号に基づいて優先権を主張し、その内容をここに援用する。
近年のスマートフォンの普及、高精細動画サービス配信、IoT(Internet of Things)サービスの発展などに伴って、光ネットワークを流れる通信トラヒックは年々増加の一途をたどっている。光ネットワークでは、これまで、伝送路としての光ファイバの構造を変えずに光ネットワークの端局に設置される光通信システム装置の高機能化、光増幅器・光スイッチの導入などにより、増加する通信トラヒック需要に対する対応がなされてきた。
現在の大容量光ネットワークの基盤となっている光ファイバは、LAN(Local Area Network)などの近距離向けの局所的なネットワークを除くと、シングルモードファイバが用いられている。シングルモードファイバは、クラッド内に光信号の通路となる単一のコアを持ち、大容量光ネットワークで用いられるC帯やL帯などの波長帯では単一のモードのみをサポートするファイバである。これにより、毎秒数テラビットに達する情報を長距離にわたり安定的に転送する大容量光ネットワークが実現されている。
また、デジタル信号処理技術とコヒーレント送受信技術を組み合わせたデジタルコヒーレント伝送技術が100ギガビット級の光伝送装置に既に導入されている。デジタルコヒーレント伝送技術を用いることにより、光搬送波の振幅と位相に独立に載せた情報を取り出し、伝送中に生じた波形歪を高精度に補正することができる。
簡単な例として、シングルモードファイバでの直交偏波の2モードを使った偏波多重光伝送を例に挙げる。偏波多重光伝送では、直交関係にある偏波にそれぞれ異なる情報を載せることができる。光伝送路中ではこれらの偏波が複雑に混合する。また、これら偏波モードの直交軸は高速に変動し、光デバイスを使って追従することは一般に困難である。そこで偏波ダイバーシティ構造に対応した受信装置は、混合した偏波多重光信号を受信し、混合した偏波多重光信号をデジタル信号に直し、デジタル信号処理を用いて信号を分離する。上記の処理は、無線通信システムで用いられる2×2MIMO(Multiple-Input Multiple-Output)システムとしてモデル化することができる。分離された信号からは、偏波ごとにそれぞれ情報が取り出され、光信号送受信装置間での通信が確立する。
別の例として、マルチモードファイバでの複数のモードを使ったモード多重光伝送を例に挙げる。モード多重光伝送では、コア径をシングルモードファイバと比較して広げることにより、C帯などの波長帯においても、複数のモードを励起することができ、各モードにそれぞれ異なる情報を載せることができる。モード多重光伝送の場合においても、偏波多重光伝送の場合と同様に、モード多重された光信号は、マルチモードファイバを伝搬中に複雑に混合する。モードダイバーシティ構造に対応した受信装置は、混合したモード多重光信号を受信し、混合したモード多重光信号をデジタル信号に直し、デジタル信号処理を用いて信号を分離する。上記の処理は、NT×NRMIMOシステムとしてモデル化できる。ただし、NTは光信号送信装置の数、NRは光信号受信装置の数を表す。NTおよびNRはいずれも2以上の整数である。また、以下では各光信号送信装置から独立した変調信号がそれぞれ送信されると仮定する。
次に、光信号受信装置が、偏波多重光伝送またはモード多重光伝送のデジタル信号処理で用いる信号分離アルゴリズムについて説明する。なお、以下ではシングルモードファイバでの偏波モードと、マルチモードファイバでの空間モードを、モードという用語で同列に扱う。無線通信MIMOシステムでは、様々な信号分離アルゴリズムが提案されている。例えば、信号分離アルゴリズムとして、空間フィルタリング、干渉キャンセラ、最尤復号などが挙げられる。一般に信号処理規模とモード分離能力はトレードオフの関係にあり、上記の順で信号処理規模が増す代わりに、モード分離能力は向上する。しかしながら、光通信システムでは、無線通信システムと比較して信号の変調速度が非常に速く、伝送路変動への追従性及びリアルタイム処理が求められるため、線形処理の空間フィルタリングが一般に用いられてきた。送信信号をx、受信信号をy、信号に付加される雑音をz、伝送路行列をHとすると、これらは式(1)の関係で結ばれる。
空間フィルタリングは、受信信号yに分離行列WTを乗じて送信信号xの等化信号x^(^はxの上に付される)を得る。ここで、Wの上付き添え字Tは転置を表す。MMSE(Minimum Mean Square Error)規範では、式(2)を満たすWTを求める。
式(2)を解くと、WTとして式(3)が得られる。

式(3)において、Iは単位行列、γはSNR(Signal-to-noise ratio)、上付きHは複素共役転置を表す。式(3)に示すように、WTを求めるにはHが必要となる。Hはパイロット信号などを用いて求めることもできるが、光通信システムでは伝送路変動への追従性や伝送レートの犠牲を考慮して、適応的にHを求めるLMS(Least Mean Square)法、RLS(Recursive Least Squares)法、CMA(Constant Modulus Algorithm)法などが用いられる。等化信号x^は、式(3)を用いて式(4)のように得られる。

式(4)の空間フィルタリングを用いることにより、特に偏波多重光通信システムにおいては一定の成果が得られてきた。しかしながら、伝送路行列Hが非ユニタリ性を持ち、雑音が大きな環境下では、等化信号x^には他モードからの残留クロストークが存在する。ここでの非ユニタリ性とは、Hについて式(5)の関係が成立することをいう。
光通信システムの非ユニタリ性は、光増幅器のモードに依存した利得、光デバイスの不完全性、融着点でのコア軸ずれなどが原因で生じる。これらの現象は、シングルモードファイバでは偏波依存損失として知られ、マルチモードファイバではモード依存損失として知られている。以下では、これらの現象をモード依存損失という用語を用いて同列に扱う。
空間フィルタリングとは別の信号分離アルゴリズムとして、干渉キャンセラがある。干渉キャンセラは並列干渉キャンセラと逐次干渉キャンセラの2種類に分けられるが、以下では逐次干渉キャンセラについて図17を用いて説明する。図17に示す第一逐次干渉キャンセラの空間フィルタリング部は、まず受信信号ベクトルの中からSINR(Signal-to-interference-plus-noise ratio)の最も高いストリームを検出する。SINRの最も高いストリームを決定するには、例えばパイロット信号を用いた方法や、伝送路行列HとSNRから式(6)に基づいて直接SINRを計算する方法が挙げられる。

式(6)において、ρiはi番目のストリームのSINRである。以下では、簡単のためにSINRの高い順に受信信号yの成分をソートしたものとして説明を行う。すなわち、1番目のストリームのSINRが最も高いものとして説明する。1番目のストリームは式(7)のように検出される。
式(7)において、wT
iは、wTのi行目の行ベクトルを表す。第一逐次干渉キャンセラの仮判定信号出力部は、空間フィルタリング部により得られた等化信号x1^(^はx1の上に付す)を判定し、x1
-(-はx1の上に付す)を出力する。その後、第一逐次干渉キャンセラの乗算器により、x1
-と、伝送路行列推定部によって得られたHの1番目の列ベクトルh1とが乗算され、乗算結果h1x1
-が第二逐次干渉キャンセラに入力される。
第二逐次干渉キャンセラでは、2番目にSINRが高いストリームに対しストリーム検出を行う。具体的には、第二逐次干渉キャンセラでは、以下の式(8)のように、受信信号yから1番目のストリーム信号由来の成分h1x1
-を減算する。
また、第二逐次干渉キャンセラでは、式(9)に示すように、Hを1番目の列ベクトルを除いた(NT-1)個の列ベクトルで再構成する。
ストリーム検出は、式(9)で得られたHを用いて分離行列wTを新たに求め、式(7)に基づいて行われる。このように、第二逐次干渉キャンセラ以降の逐次干渉キャンセラでは、式(8)に示す干渉除去、式(9)に示すHの再構成及びストリーム検出を順に行う。この処理を、最後のNT番目のストリーム検出が行われるまで続ける。
G. D. Golden, C. J. Foschini, R.A. Valenzuela and P. W. Wolniansky, "Detection algorithm and initial laboratory results using V-BLAST space-time communication architecture", Electronics letters, 1999, vol. 35, No. 1
逐次干渉キャンセラは、後段にいくに従い、受信信号に含まれるストリーム数が減るため、空間ダイバーシティ効果が得られる。そのため、空間フィルタリングと比較すると高い信号分離性能が得られる。しかしながら、逐次干渉キャンセラは、レプリカ信号を生成するために、伝送路行列Hの生成が必要となる。上述したように、一般に、光通信システムでは、分離行列wTの推定のためにLMS法やRLS法やCMA法などの適応アルゴリズムが用いられる。仮にHを推定すると、伝送レートの犠牲や、Hの推定誤差によるレプリカ信号生成精度の悪化による逐次干渉キャンセラの特性劣化が懸念される。さらに、コヒーレント送受信を行う光通信システムを考えると、受信信号には位相雑音や周波数オフセットが重畳しており、これらもレプリカ信号生成の精度の悪化につながりうる。
以上をまとめると、空間フィルタリングでは、モード依存損失の影響がSNRの劣化及び残留モード間クロストークとして現れ、これらSNRの劣化及び残留モード間クロストークを完全に取り除くことができない。逐次干渉キャンセラでは、伝送路行列、位相雑音、周波数オフセットなどを別途推定する必要があり、推定精度によっては信号分離性能が低下してしまうという問題があった。モード依存損失は、光信号の伝送距離の拡大に伴って増加するために、光通信システムの長距離化にとって大きな阻害要因となる。
上記事情に鑑み、本発明は、高精度で多重信号を分離することができる技術の提供を目的としている。
本発明の一態様は、複数の受信信号から特定の信号を分離する少なくとも1つの信号分離装置を備え、前記少なくとも1つの信号分離装置のそれぞれは、少なくとも1つの等化信号を分離する空間フィルタリング部と、前記等化信号を判定して第1の判定信号を生成し、生成された前記第1の判定信号を出力する判定信号出力部とを備え、前記空間フィルタリング部は、前記複数の受信信号、および、前記判定信号出力部から出力される前記第1の判定信号または他の信号分離装置から出力される第2の判定信号のいずれかのうち、少なくとも前記複数の受信信号と、所定の重み係数とを乗算することによって、前記少なくとも1つの等化信号を分離する信号受信装置である。
上記信号受信装置において、前記少なくとも1つの信号分離装置は複数の信号分離装置であって、前記空間フィルタリング部は、前記複数の受信信号および前記第2の判定信号のうち、少なくとも前記複数の受信信号と、前記所定の重み係数とを乗算することによって、前記少なくとも1つの等化信号として単一の等化信号を分離し、前記判定信号出力部は、前記等化信号として尤もらしい信号を表す仮判定信号を前記第1の判定信号として生成する仮判定信号出力部であり、k(kは2以上の整数)番目の信号分離装置の空間フィルタリング部では、前記複数の受信信号であるNR(NRは2以上の整数)個の受信信号と、一番目の信号分離装置から(k-1)番目の信号分離装置までで得られた前記第2の判定信号としての(k-1)個の仮判定信号との合計(NR+k-1)個の信号を入力し、前記複数の受信信号から信号kを分離するようにしてもよい。
上記信号受信装置において、前記少なくとも1つの信号分離装置は複数の信号分離装置であって、前記空間フィルタリング部は、前記複数の受信信号および前記第2の判定信号のうち、少なくとも前記複数の受信信号と、前記所定の重み係数とを乗算することによって、前記少なくとも1つの等化信号として単一の等化信号を分離し、前記判定信号出力部は、前記等化信号として尤もらしい信号を表す仮判定信号を前記第1の判定信号として生成する仮判定信号出力部であり、k(kは2以上の整数)番目の信号分離装置の空間フィルタリング部では、前記複数の受信信号であるNR(NRは2以上の整数)個の受信信号と、一番目の信号分離装置から(k-1)番目の信号分離装置までで得られた前記第2の判定信号としての(k-1)個の仮判定信号との合計(NR+k-1)個の信号を入力し、前記複数の受信信号から信号kを分離するようにしてもよい。
上記信号受信装置において、前記少なくとも1つの信号分離装置は複数の信号分離装置であって、前記空間フィルタリング部は、前記複数の受信信号および前記第2の判定信号のうち、少なくとも前記複数の受信信号と、前記所定の重み係数とを乗算することによって、前記少なくとも1つの等化信号として複数の等化信号を分離し、k(kは2以上の整数)番目の信号分離装置の空間フィルタリング部では、前記複数の受信信号であるNR(NRは2以上の整数)個の受信信号を入力するとともに、(k-1)番目の信号分離装置の判定信号出力部により生成される前記第1の判定信号を前記第2の判定信号として入力し、前記複数の受信信号から前記特定の信号を分離するようにしてもよい。
上記信号受信装置において、前記判定信号出力部は、前記等化信号として尤もらしい信号を表す仮判定信号を前記第1の判定信号として生成する仮判定信号出力部であってもよい。
上記信号受信装置において、前記判定信号出力部は、前記等化信号として尤もらしい信号を表す仮判定信号を前記第1の判定信号として生成する仮判定信号出力部であってもよい。
上記信号受信装置において、前記判定信号出力部は、送信信号情報の尤度情報を算出し、前記尤度情報に基づく軟判定シンボルを前記第1の判定信号として生成する軟判定信号出力部であってもよい。
上記信号受信装置において、前記少なくとも1つの信号分離装置は単一の信号分離装置であって、前記判定信号出力部は、前記第1の判定信号を前記空間フィルタリング部に出力し、前記空間フィルタリング部は、前記複数の受信信号、および、前記判定信号出力部から出力される前記第1の判定信号のうち、少なくとも前記複数の受信信号と、前記所定の重み係数とを乗算することによって、前記少なくとも1つの等化信号として複数の等化信号を分離し、前記判定信号出力部は、前記複数の受信信号に対して、前記第1の判定信号を所定回数生成すると、前記第1の判定信号を前記特定の信号として出力するようにしてもよい。
上記信号受信装置において、前記少なくとも1つの信号分離装置は単一の信号分離装置であって、前記判定信号出力部は、前記第1の判定信号を前記空間フィルタリング部に出力し、前記空間フィルタリング部は、前記複数の受信信号、および、前記判定信号出力部から出力される前記第1の判定信号のうち、少なくとも前記複数の受信信号と、前記所定の重み係数とを乗算することによって、前記少なくとも1つの等化信号として複数の等化信号を分離し、前記判定信号出力部は、前記複数の受信信号に対して、前記第1の判定信号を所定回数生成すると、前記第1の判定信号を前記特定の信号として出力するようにしてもよい。
上記信号受信装置において、前記判定信号出力部は、誤り訂正復号部を備えていてもよい。
上記信号受信装置において、前記空間フィルタリング部が出力する前記少なくとも1つの等化信号に基づいて、前記少なくとも1つの等化信号の位相雑音を推定し、推定された前記位相雑音を出力する位相雑音推定部をさらに備えていてもよい。
上記信号受信装置において、前記空間フィルタリング部が出力する前記少なくとも1つの等化信号に基づいて、前記少なくとも1つの等化信号の位相雑音を推定し、推定された前記位相雑音を出力する位相雑音推定部をさらに備えていてもよい。
上記信号受信装置において、前記空間フィルタリング部は、前記複数の受信信号に係数を乗算する第一乗算部と、前記第1の判定信号または前記第2の判定信号に係数を乗算する第二乗算部と、前記位相雑音推定部から出力される前記位相雑音と前記第一乗算部の出力を乗算する第三乗算部と、前記第二乗算部の出力と前記第三乗算部の出力を加算する加算部とを備えていてもよい。
上記信号受信装置において、前記空間フィルタリング部は、前記位相雑音推定部から出力される前記位相雑音と前記第1の判定信号または前記第2の判定信号とを乗算する位相補正部と、前記複数の受信信号および前記位相補正部の出力信号に係数を乗算する係数乗算部と、を備えていてもよい。
上記信号受信装置において、前記空間フィルタリング部は、前記位相雑音推定部から出力される前記位相雑音と前記第1の判定信号または前記第2の判定信号とを乗算する位相補正部と、前記複数の受信信号および前記位相補正部の出力信号に係数を乗算する係数乗算部と、を備えていてもよい。
本発明の一態様は、複数の受信信号から特定の信号を分離する少なくとも1つの信号分離装置のそれぞれが、少なくとも1つの等化信号を分離する空間フィルタリングステップと、前記等化信号を判定して第1の判定信号を生成し、生成された前記第1の判定信号を出力する判定信号出力ステップと、を有し、前記空間フィルタリングステップでは、前記複数の受信信号、および、前記判定信号出力ステップにおいて出力される前記第1の判定信号または他の信号分離装置から出力される第2の判定信号のいずれかのうち、少なくとも前記複数の受信信号と、所定の重み係数とを乗算することによって、前記少なくとも1つの等化信号を分離する信号分離方法である。
本発明により、高精度で多重信号を分離することが可能となる。
以下、本発明の実施形態を、図面を参照しながら説明する。
図1は、本発明の第1~第4の実施形態における光信号受信装置10の構成図である。光信号受信装置10は、受信部11及び第一信号分離装置12-1~第k信号分離装置12-k(kは2以上の整数)を備える。なお、以下の説明では、第一信号分離装置12-1~第k信号分離装置12-kについて特に区別しない場合には単に信号分離装置12と記載する。
受信部11は、不図示の各光信号送信装置から送信された信号を受信する。例えば、受信部11は、NR個(NRは2以上の整数)の信号を受信する。受信部11は、受信したNR個の信号を各信号分離装置12に出力する。
図1は、本発明の第1~第4の実施形態における光信号受信装置10の構成図である。光信号受信装置10は、受信部11及び第一信号分離装置12-1~第k信号分離装置12-k(kは2以上の整数)を備える。なお、以下の説明では、第一信号分離装置12-1~第k信号分離装置12-kについて特に区別しない場合には単に信号分離装置12と記載する。
受信部11は、不図示の各光信号送信装置から送信された信号を受信する。例えば、受信部11は、NR個(NRは2以上の整数)の信号を受信する。受信部11は、受信したNR個の信号を各信号分離装置12に出力する。
信号分離装置12は、入力された受信信号の分離を行う。例えば、第一信号分離装置12-1は、入力されたNR個の信号から単一の信号を分離する。第一信号分離装置12-1は、分離した信号から得られる信号を第k信号分離装置12-kに出力する(図1におけるNR+1)。第k信号分離装置12-kは、NR個の信号と、第一信号分離装置から第(k-1)信号分離装置12までで得られた(k-1)個の信号との合計(NR+k-1)個の信号を入力し、受信信号から信号kを分離する。なお、ここでは第k信号分離装置12-kについて説明したが、第一信号分離装置12-1と第k信号分離装置12-kとの間に信号分離装置(第j信号分離装置(1<j<k)とする)が存在する場合も、第k信号分離装置12-kと同様である(以下に説明する第1~第4の実施形態についても同様)。すなわち、第j信号分離装置12-jは、NR個の信号と、第一信号分離装置から第(j-1)信号分離装置12までで得られた(j-1)個の信号との合計(NR+j-1)個の信号を入力し、受信信号から信号jを分離する。
以下、信号分離装置の詳細について説明する。
以下、信号分離装置の詳細について説明する。
(第1の実施形態)
図2は、第1の実施形態における光信号受信装置10の機能構成を表す概略ブロック図である。なお、図2では受信部11の図示を省略している(図2以降の図面についても同様)。図2では、光信号受信装置10が備える信号分離装置12のうち第一信号分離装置12-1及び第二信号分離装置12-2を用いて、信号分離装置12の処理を説明する。なお、本実施形態においても説明の簡単化のためにSINRの高い順に受信信号y(すなわち、受信したNR個の信号)の成分をソートしたものとして説明を行う。
図2は、第1の実施形態における光信号受信装置10の機能構成を表す概略ブロック図である。なお、図2では受信部11の図示を省略している(図2以降の図面についても同様)。図2では、光信号受信装置10が備える信号分離装置12のうち第一信号分離装置12-1及び第二信号分離装置12-2を用いて、信号分離装置12の処理を説明する。なお、本実施形態においても説明の簡単化のためにSINRの高い順に受信信号y(すなわち、受信したNR個の信号)の成分をソートしたものとして説明を行う。
まず、第一信号分離装置12-1の構成について説明する。第一信号分離装置12-1は、空間フィルタリング部13-1、仮判定信号出力部14-1及び重み係数更新部15-1を備える。
空間フィルタリング部13-1は、受信部11から出力されたNR個の信号を入力し、入力したNR個の信号に対して、重み係数を乗算することによって等化信号を分離する。重み係数は、信号分離に用いられる係数であり、初期値としては予め設定されていてもよいし、0であってもよい。なお、重み係数は、処理の度に更新される。空間フィルタリング部13-1の処理によって分離された等化信号をx1^とする。
空間フィルタリング部13-1は、受信部11から出力されたNR個の信号を入力し、入力したNR個の信号に対して、重み係数を乗算することによって等化信号を分離する。重み係数は、信号分離に用いられる係数であり、初期値としては予め設定されていてもよいし、0であってもよい。なお、重み係数は、処理の度に更新される。空間フィルタリング部13-1の処理によって分離された等化信号をx1^とする。
仮判定信号出力部14-1は、空間フィルタリング部13-1の処理によって得られた等化信号x1^を入力し、入力した等化信号x1^を判定し、判定結果を第一仮判定信号x1
-として第二信号分離装置12-2に出力する。
重み係数更新部15-1は、空間フィルタリング部13-1の処理によって得られた等化信号x1^を入力し、入力した等化信号x1^に基づいて重み係数wT 1を更新する。以下の説明では、重み係数更新部15-1が更新する重み係数wT 1を第一重み係数と記載する。
重み係数更新部15-1は、空間フィルタリング部13-1の処理によって得られた等化信号x1^を入力し、入力した等化信号x1^に基づいて重み係数wT 1を更新する。以下の説明では、重み係数更新部15-1が更新する重み係数wT 1を第一重み係数と記載する。
次に、第二信号分離装置12-2の構成について説明する。第二信号分離装置12-2は、空間フィルタリング部13-2、仮判定信号出力部14-2及び重み係数更新部15-2を備える。
空間フィルタリング部13-2は、受信部11から出力されたNR個の信号と、第一信号分離装置12-1から出力された第一仮判定信号x1 -との合計(NR+1)個の信号を入力し、入力した(NR+1)個の信号に対して、重み係数ベクトルを乗算することによって等化信号を分離する。空間フィルタリング部13-2の処理によって分離された等化信号をx2^とする。
空間フィルタリング部13-2は、受信部11から出力されたNR個の信号と、第一信号分離装置12-1から出力された第一仮判定信号x1 -との合計(NR+1)個の信号を入力し、入力した(NR+1)個の信号に対して、重み係数ベクトルを乗算することによって等化信号を分離する。空間フィルタリング部13-2の処理によって分離された等化信号をx2^とする。
仮判定信号出力部14-2は、空間フィルタリング部13-2の処理によって得られた等化信号x2^を入力し、入力した等化信号x2^を判定し、判定結果である第二仮判定信号x2
-を後段の信号分離装置12に出力する。
重み係数更新部15-2は、空間フィルタリング部13-2の処理によって得られた等化信号x2^を入力し、入力した等化信号x2^に基づいて重み係数wT 2を更新する。以下の説明では、重み係数更新部15-2が更新する重み係数wT 2を第二重み係数と記載する。
重み係数更新部15-2は、空間フィルタリング部13-2の処理によって得られた等化信号x2^を入力し、入力した等化信号x2^に基づいて重み係数wT 2を更新する。以下の説明では、重み係数更新部15-2が更新する重み係数wT 2を第二重み係数と記載する。
図3は、第1の実施形態における光信号受信装置10の処理の流れを説明するフローチャートである。なお、図3では、光信号受信装置10が備える信号分離装置12のうち第一信号分離装置12-1及び第二信号分離装置12-2を用いて、信号分離装置12の処理を説明する。
空間フィルタリング部13-1は、受信部11から出力されたNR個の信号を入力する(ステップS101)。空間フィルタリング部13-1は、入力したNR個の信号と、重み係数更新部15-1から出力された第一重み係数wT 1とを乗算することによって等化信号を分離する(ステップS102)。空間フィルタリング部13-1は、分離した等化信号x1^を仮判定信号出力部14-1に出力する。
空間フィルタリング部13-1は、受信部11から出力されたNR個の信号を入力する(ステップS101)。空間フィルタリング部13-1は、入力したNR個の信号と、重み係数更新部15-1から出力された第一重み係数wT 1とを乗算することによって等化信号を分離する(ステップS102)。空間フィルタリング部13-1は、分離した等化信号x1^を仮判定信号出力部14-1に出力する。
仮判定信号出力部14-1は、空間フィルタリング部13-1から出力された等化信号x1^を入力する。仮判定信号出力部14-1は、入力した等化信号x1^を判定し、判定結果を第一仮判定信号x1
-として第二信号分離装置12-2に出力する(ステップS103)。ここで、判定の処理としては、等化信号として尤もらしい信号を判定することを意味する。ここで、判定の処理について一例を挙げて説明する。x1^の判定を、QPSK(Quadrature Phase Shift Keying)変調信号を用いて考える。x1^は次のような実数成分xr1^と虚数成分xi1^に分けることができる。
x1^=xr1^+1j*xi1^
x1^を判定するには、xr1^とxi1^をそれぞれ判定すれば良い。白色雑音のもとで、全てのQPSK変調信号のマーク率が全てのシンボル間で等しいと仮定すると、xr1^の識別点は0である。すなわち、xr1^>0またはxr1^=0であるならば1(または0)と判定し、xr1^<0であるならば0(または1)と判定する。同様に、xi1^>0であるならば1(または0)と判定し、xi1^<0またはxi1^=0であるならば0(または1)と判定する。xr1^とxi1^でそれぞれ1ビットずつ判定され、合計2ビットを仮判定結果である第一仮判定信号x1 -として出力する。
x1^=xr1^+1j*xi1^
x1^を判定するには、xr1^とxi1^をそれぞれ判定すれば良い。白色雑音のもとで、全てのQPSK変調信号のマーク率が全てのシンボル間で等しいと仮定すると、xr1^の識別点は0である。すなわち、xr1^>0またはxr1^=0であるならば1(または0)と判定し、xr1^<0であるならば0(または1)と判定する。同様に、xi1^>0であるならば1(または0)と判定し、xi1^<0またはxi1^=0であるならば0(または1)と判定する。xr1^とxi1^でそれぞれ1ビットずつ判定され、合計2ビットを仮判定結果である第一仮判定信号x1 -として出力する。
また、重み係数更新部15-1は、空間フィルタリング部13-1から出力された等化信号x1^を入力する。重み係数更新部15-1は、LMS法やRLS法やCMA法などの適応アルゴリズムと、入力した等化信号x1^を用いて、第一重み係数wT
1を更新する(ステップS104)。例えば、LMS法を用いる場合、重み係数更新部15-1はエラーをe1、ステップサイズパラメータをμとして以下の式(10)のように第一重み係数wT
1を更新する。
空間フィルタリング部13-2は、受信部11から出力されたNR個の信号と、第一信号分離装置12-1から出力された第一仮判定信号x1
-との合計(NR+1)個の信号を入力する(ステップS105)。空間フィルタリング部13-2は、入力した(NR+1)個の信号と、重み係数更新部15-2から出力された第二重み係数wT
2とを乗算することによって等化信号を分離する(ステップS106)。空間フィルタリング部13-2は、分離した等化信号x2^を仮判定信号出力部14-2に出力する。
仮判定信号出力部14-2は、空間フィルタリング部13-2から出力された等化信号x2^を入力する。仮判定信号出力部14-2は、入力した等化信号x2^を判定し、判定結果を第二仮判定信号x2
-として後段の信号分離装置12に出力する(ステップS107)。また、重み係数更新部15-2は、空間フィルタリング部13-2から出力された等化信号x2^を入力する。重み係数更新部15-2は、LMS法やRLS法やCMA法などの適応アルゴリズムと、入力した等化信号x2^を用いて、第二重み係数wT
2を更新する(ステップS108)。例えば、重み係数更新部15-2は、エラーをe2として、以下の式(11)のように第二重み係数wT
2を更新する。
なお、図2及び図3では、2つの信号分離装置12を用いて説明したが、第三信号分離装置12-3の場合には、受信部11から出力されたNR個の信号と、第一信号分離装置12-1から出力された第一仮判定信号x1
-と、第二信号分離装置12-2から出力された第二仮判定信号x2
-との合計(NR+2)個の信号が入力される。このように、本実施形態における第k信号分離装置12-kでは、空間フィルタリング部13において、第一信号分離装置12-1から第(k-1)信号分離装置12-(k-1)までで分離・判定された(k-1)個の信号成分と、受信部11から出力されたNR個の信号との合計(NR+k-1)個の成分からなる信号を入力し、信号kの分離を行う。
以上のように構成された光信号受信装置10によれば、次段の第k信号分離装置12-kの空間フィルタリング部13-kに、前段の第(k-1)信号分離装置12-(k-1)で抽出された信号から生成された第(k-1)仮判定信号x(k-1)
-を追加する。すなわち、第k信号分離装置12-kの空間フィルタリング部13-kでは、NR個の受信信号と、第一信号分離装置12-1から第(k-1)信号分離装置12-(k-1)までで判定された(k-1)個の信号成分とを合計して(NR+k-1)個の成分からなる信号ベクトルを入力し、信号kの分離を行う。そのため、高精度で多重信号を分離することが可能となる。
また、逐次干渉キャンセラの信号検出性能は、レプリカ信号の生成精度に大きく依存する。従来構成の逐次干渉キャンセラを光通信に適用する場合、レプリカ信号の生成精度を高めるためには、空間フィルタリング部13-1の入力前において、伝搬路での位相および振幅の変化、すなわちチャネル情報を高精度に求めることが要求される。本実施形態の構成を用いることにより、各受信信号に含まれる任意のストリームの干渉成分の重み係数は重み係数更新部において適応的に調整され、チャネル情報の推定を予め行うことが不要となり、干渉成分の除去が可能となる。
(第2の実施形態)
図4は、第2の実施形態における光信号受信装置10aの機能構成を表す概略ブロック図である。図4では、光信号受信装置10aが備える信号分離装置12aのうち第一信号分離装置12a-1及び第二信号分離装置12a-2を用いて、信号分離装置12aの処理を説明する。なお、本実施形態においても説明の簡単化のためにSINRの高い順に受信信号yの成分をソートしたものとして説明を行う。
図4は、第2の実施形態における光信号受信装置10aの機能構成を表す概略ブロック図である。図4では、光信号受信装置10aが備える信号分離装置12aのうち第一信号分離装置12a-1及び第二信号分離装置12a-2を用いて、信号分離装置12aの処理を説明する。なお、本実施形態においても説明の簡単化のためにSINRの高い順に受信信号yの成分をソートしたものとして説明を行う。
まず、第一信号分離装置12a-1の構成について説明する。第一信号分離装置12a-1は、空間フィルタリング部13-1、仮判定信号出力部14a-1及び重み係数更新部15-1を備える。
第一信号分離装置12a-1は、仮判定信号出力部14-1に代えて仮判定信号出力部14a-1を備える点で第一信号分離装置12-1と構成が異なる。第一信号分離装置12a-1における他の構成は第一信号分離装置12-1と同様である。そのため、第一信号分離装置12a-1の全体の説明は省略し、仮判定信号出力部14a-1について説明する。
第一信号分離装置12a-1は、仮判定信号出力部14-1に代えて仮判定信号出力部14a-1を備える点で第一信号分離装置12-1と構成が異なる。第一信号分離装置12a-1における他の構成は第一信号分離装置12-1と同様である。そのため、第一信号分離装置12a-1の全体の説明は省略し、仮判定信号出力部14a-1について説明する。
仮判定信号出力部14a-1は、空間フィルタリング部13-1の処理によって得られた等化信号x1^を入力し、入力した等化信号x1^から得られる第一仮判定信号x1
-を第二信号分離装置12-2に出力する。仮判定信号出力部14a-1は、対数尤度比計算部141-1、デインタリーバ142-1、誤り訂正復号部143-1、インタリーバ144-1及びマッピング回路145-1を備える。
対数尤度比計算部141-1は、空間フィルタリング部13-1の処理によって得られた等化信号x1^を入力し、入力した等化信号x1^を構成する各ビットについて、受信信号yが受信されたもとでの0が送信された確率と1が送信された確率との対数尤度比を算出する。対数尤度比計算部141-1は、算出した対数尤度比をデインタリーバ142-1に出力する。デインタリーバ142-1は、対数尤度比計算部141-1から出力された対数尤度比をビット毎に並び替える。デインタリーバ142-1は、並び替え後の対数尤度比を誤り訂正復号部143-1に出力する。
誤り訂正復号部143-1は、光信号送信装置側で用いられた誤り訂正符号と同様の誤り訂正符号を用いて復号する。本実施形態における誤り訂正符号とは、例えばハミング符号、BCH符号、LDPC(Low Density Parity Check)符号及び畳み込み符号等の特定の誤り訂正符号に限定されることなく、あらゆる誤り訂正符号が用いられてもよい。インタリーバ144-1は、誤り訂正復号部143-1から出力される信号の各ビットを光信号送信装置側と同様に並び替える。マッピング回路145-1は、並び替え後の各ビットを各シンボルにマッピングすることによって第一仮判定信号x1
-を生成する。マッピング回路145-1は、生成した第一仮判定信号x1
-を第二信号分離装置12-2に出力する。
次に、第二信号分離装置12a-2の構成について説明する。第二信号分離装置12a-2は、空間フィルタリング部13-2、仮判定信号出力部14a-2及び重み係数更新部15-2を備える。
第二信号分離装置12a-2は、仮判定信号出力部14-2に代えて仮判定信号出力部14a-2を備える点で第二信号分離装置12-2と構成が異なる。第二信号分離装置12a-2における他の構成は第二信号分離装置12-2と同様である。そのため、第二信号分離装置12a-2の全体の説明は省略し、仮判定信号出力部14a-2について説明する。
第二信号分離装置12a-2は、仮判定信号出力部14-2に代えて仮判定信号出力部14a-2を備える点で第二信号分離装置12-2と構成が異なる。第二信号分離装置12a-2における他の構成は第二信号分離装置12-2と同様である。そのため、第二信号分離装置12a-2の全体の説明は省略し、仮判定信号出力部14a-2について説明する。
仮判定信号出力部14a-2は、空間フィルタリング部13-2の処理によって得られた等化信号x2^を入力し、入力した等化信号x2^から得られる第二仮判定信号x2
-を後段の信号分離装置12に出力する。仮判定信号出力部14a-2は、対数尤度比計算部141-2、デインタリーバ142-2、誤り訂正復号部143-2、インタリーバ144-2及びマッピング回路145-2を備える。なお、対数尤度比計算部141-2、デインタリーバ142-2、誤り訂正復号部143-2、インタリーバ144-2及びマッピング回路145-2の処理については、仮判定信号出力部14a-1が備える同名の機能部と同様の処理を行うため説明を省略する。
なお、図4では、2つの信号分離装置12aを用いて説明したが、第三信号分離装置12a-3の場合には、受信部11から出力されたNR個の信号と、第一信号分離装置12a-1から出力された第一仮判定信号x1
-と、第二信号分離装置12a-2から出力された第二仮判定信号x2
-との合計(NR+2)個の信号が入力される。このように、本実施形態における信号分離装置12a-kでは、空間フィルタリング部13において、第一信号分離装置12a-1から第(k-1)信号分離装置12a-(k-1)までで分離・判定された(k-1)個の信号成分と、受信部11から出力されたNR個の信号との合計(NR+k-1)個の成分からなる信号を入力し、信号kの分離を行う。
第2の実施形態の効果を確認するための伝送シミュレーションを行った結果を図5に示す。図5では、伝送路モデルとして、2×2のMIMOシステムを想定し、伝送路行列Hの1行目のh1と2行目のh2の相関係数が0.8となるように設定した。また、2つの光信号送信装置から独立したQPSK信号を送信し、Eb/N0(ビットエネルギー対雑音電力スペクトル密度比)を変化させたときの両信号の平均ビットエラーレートを記録した。図5には、従来方式と第2の実施形態のビットエラーレートの比較結果が示されている。図5より、第2の実施形態を適用することにより、ビットエラーレート10-3においてEb/N0の利得、すなわちSNR利得として約3.5dBが得られていることが分かる。
以上のように構成された光信号受信装置10aによれば、第1の実施形態と同様の効果を得ることができる。
また、光信号受信装置10aは、仮判定信号の生成時に誤り訂正を行う。これにより、第1の実施形態よりも精度よく多重信号を分離することが可能となる。
また、一般に逐次干渉キャンセラの信号検出性能はレプリカ信号の生成精度に依存する。空間フィルタリング部13-1から出力される等化信号x1^を、誤り訂正復号部143-1を通さずに仮判定すると誤りを含みやすい為、逐次干渉キャンセラの信号検出性能が劣化しやすい。一方で、空間フィルタリング部13-1から出力される等化信号x1^を、誤り訂正復号部143-1を通して仮判定すると、誤り訂正復号の効果とインタリーバの効果とがあいまって、ビット誤り率が誤り閾値以下もしくはその付近であれば、レプリカ信号の生成精度を高め、結果として逐次干渉キャンセラの信号検出性能を高めることができる。
また、光信号受信装置10aは、仮判定信号の生成時に誤り訂正を行う。これにより、第1の実施形態よりも精度よく多重信号を分離することが可能となる。
また、一般に逐次干渉キャンセラの信号検出性能はレプリカ信号の生成精度に依存する。空間フィルタリング部13-1から出力される等化信号x1^を、誤り訂正復号部143-1を通さずに仮判定すると誤りを含みやすい為、逐次干渉キャンセラの信号検出性能が劣化しやすい。一方で、空間フィルタリング部13-1から出力される等化信号x1^を、誤り訂正復号部143-1を通して仮判定すると、誤り訂正復号の効果とインタリーバの効果とがあいまって、ビット誤り率が誤り閾値以下もしくはその付近であれば、レプリカ信号の生成精度を高め、結果として逐次干渉キャンセラの信号検出性能を高めることができる。
(第3の実施形態)
図6は、第3の実施形態における光信号受信装置10bにおける第k信号分離装置12b-kの機能構成を表す概略ブロック図である。なお、本実施形態においても説明の簡単化のためにSINRの高い順に受信信号yの成分をソートしたものとして説明を行う。
第k信号分離装置12b-kは、空間フィルタリング部13b-k、仮判定信号出力部14-k、重み係数更新部15b-k及び位相雑音推定部16-kを備える。
図6は、第3の実施形態における光信号受信装置10bにおける第k信号分離装置12b-kの機能構成を表す概略ブロック図である。なお、本実施形態においても説明の簡単化のためにSINRの高い順に受信信号yの成分をソートしたものとして説明を行う。
第k信号分離装置12b-kは、空間フィルタリング部13b-k、仮判定信号出力部14-k、重み係数更新部15b-k及び位相雑音推定部16-kを備える。
第k信号分離装置12b-kは、空間フィルタリング部13-k及び重み係数更新部15-kに代えて空間フィルタリング部13b-k及び重み係数更新部15b-kを備える点、新たに位相雑音推定部16-kを備える点で第k信号分離装置12-k(例えば、k=2の場合、第二信号分離装置12-2)と構成が異なる。第k信号分離装置12b-kにおける他の構成は第k信号分離装置12-kと同様である。そのため、第k信号分離装置12b-kの全体の説明は省略し、空間フィルタリング部13b-k、重み係数更新部15b-k及び位相雑音推定部16-kについて説明する。
空間フィルタリング部13b-kは、受信部11から出力されたNR個の信号と、第一信号分離装置12-1から第(k-1)信号分離装置12b-(k-1)までで出力された第一仮判定信号x1
-から第(k-1)仮判定信号x(k-1)
-までとの合計(NR+k-1)個の信号を入力する。空間フィルタリング部13b-kは、入力した(NR+k-1)個の信号と、重み係数更新部15b-kから出力された第k重み係数wT
kとを乗算することによって等化信号を分離する。例えば、空間フィルタリング部13b-kは、以下の式(12)に基づいて、等化信号xk^を分離する。

式(12)において、第1項の乗算は第一乗算部131-kおよび乗算器131a-kで実行され、第2項の乗算は第二乗算部132-kで実行される。ここで、wT
k1はNR×1の列ベクトル、wT
k2は(k-1)×1の列ベクトルである。また、θkは信号kに対し位相雑音推定部16-kにおいて推定された位相雑音を表す。
空間フィルタリング部13b-kは、第一乗算部131-k、乗算器131a-k(第三乗算部)、第二乗算部132-k及び加算器133-k(加算部)を備える。
第一乗算部131-kは、入力した(NR+k-1)個の信号のうち受信信号であるNR個の信号と、重み係数更新部15b-kから出力された第k重み係数wT k1とを乗算する。このように、第一乗算部131-kは、NR個の受信信号に対して係数を乗算する。
乗算器131a-kは、第一乗算部131-kから出力された出力信号と、位相雑音推定部16-kによって推定された位相雑音とを乗算する。
第二乗算部132-kは、入力した(NR+k-1)個の信号のうち(k-1)個の信号と、重み係数更新部15b-kから出力された第k重み係数wT k2とを乗算する。第二乗算部132-kに入力される(k-1)個の信号は、第一信号分離装置12-1から第(k-1)信号分離装置12b-(k-1)までで出力された第一仮判定信号x1 -から第(k-1)仮判定信号x(k-1) -である。このように、第二乗算部132-kは、(k-1)個の信号に対して係数を乗算する。
第一乗算部131-kは、入力した(NR+k-1)個の信号のうち受信信号であるNR個の信号と、重み係数更新部15b-kから出力された第k重み係数wT k1とを乗算する。このように、第一乗算部131-kは、NR個の受信信号に対して係数を乗算する。
乗算器131a-kは、第一乗算部131-kから出力された出力信号と、位相雑音推定部16-kによって推定された位相雑音とを乗算する。
第二乗算部132-kは、入力した(NR+k-1)個の信号のうち(k-1)個の信号と、重み係数更新部15b-kから出力された第k重み係数wT k2とを乗算する。第二乗算部132-kに入力される(k-1)個の信号は、第一信号分離装置12-1から第(k-1)信号分離装置12b-(k-1)までで出力された第一仮判定信号x1 -から第(k-1)仮判定信号x(k-1) -である。このように、第二乗算部132-kは、(k-1)個の信号に対して係数を乗算する。
加算器133-kは、乗算器131a-kで得られた乗算結果と、第二乗算部132-kで得られた乗算結果とを加算することによって等化信号xk^を生成する。加算器133-kは、生成した等化信号xk^を仮判定信号出力部14-k、重み係数更新部15b-k及び位相雑音推定部16-kに出力する。
位相雑音推定部16-kは、空間フィルタリング部13b-kの処理によって得られた等化信号xk^を入力し、入力した等化信号xk^から位相雑音を推定する。位相雑音推定部16-kで用いるアルゴリズムは、特に限定するものではなく、デジタル位相同期ループ法やビタビ・ビタビアルゴリズムなどを用いることができる。また、位相雑音推定部16-kは、光位相同期ループからの出力を用いてもよい。
位相雑音推定部16-kは、空間フィルタリング部13b-kの処理によって得られた等化信号xk^を入力し、入力した等化信号xk^から位相雑音を推定する。位相雑音推定部16-kで用いるアルゴリズムは、特に限定するものではなく、デジタル位相同期ループ法やビタビ・ビタビアルゴリズムなどを用いることができる。また、位相雑音推定部16-kは、光位相同期ループからの出力を用いてもよい。
重み係数更新部15b-kは、空間フィルタリング部13b-kから出力された等化信号xk^を入力する。重み係数更新部15b-kは、LMS法やRLS法やCMA法などの適応アルゴリズムと、入力した等化信号xk^を用い、エラーをekとして、以下の式(13)のように第k重み係数wT
kを更新する。

以上のように構成された光信号受信装置10bによれば、第1の実施形態及び第2の実施形態と同様の効果を得ることができる。
また、前述のように逐次干渉キャンセラの信号検出性能は、レプリカ信号の生成精度に大きく依存する。光コヒーレント検波の場合、受信信号には、送信側の光源と受信側の局発光の位相ずれや周波数ずれに起因する位相雑音が重畳する。従来の逐次干渉キャンセラを光通信に適用する場合、レプリカ信号の生成精度を高めるためには、空間フィルタリング部13b-kの入力前において、伝搬路での位相および振幅の変化、すなわちチャネル情報を高精度に求めることが要求されるだけではなく、位相雑音を高精度に求めることも要求される。それに対して、本実施形態における位相雑音推定部16-kと空間フィルタリング部13b-kとを組み合わせて用いることにより、チャネル情報の推定や位相雑音の推定を予め行うことが不要となる。
また、前述のように逐次干渉キャンセラの信号検出性能は、レプリカ信号の生成精度に大きく依存する。光コヒーレント検波の場合、受信信号には、送信側の光源と受信側の局発光の位相ずれや周波数ずれに起因する位相雑音が重畳する。従来の逐次干渉キャンセラを光通信に適用する場合、レプリカ信号の生成精度を高めるためには、空間フィルタリング部13b-kの入力前において、伝搬路での位相および振幅の変化、すなわちチャネル情報を高精度に求めることが要求されるだけではなく、位相雑音を高精度に求めることも要求される。それに対して、本実施形態における位相雑音推定部16-kと空間フィルタリング部13b-kとを組み合わせて用いることにより、チャネル情報の推定や位相雑音の推定を予め行うことが不要となる。
<変形例>
第k信号分離装置12b-kが備える仮判定信号出力部14-kは、誤り訂正の機能を有するものと置き換えてもよい。すなわち、仮判定信号出力部14-kが、第2の実施形態と同様に対数尤度比計算部、デインタリーバ、誤り訂正復号部、インタリーバ及びマッピング回路を備えてもよい。
第k信号分離装置12b-kが備える仮判定信号出力部14-kは、誤り訂正の機能を有するものと置き換えてもよい。すなわち、仮判定信号出力部14-kが、第2の実施形態と同様に対数尤度比計算部、デインタリーバ、誤り訂正復号部、インタリーバ及びマッピング回路を備えてもよい。
(第4の実施形態)
図7は、第4の実施形態における光信号受信装置10cにおける第k信号分離装置12c-kの機能構成を表す概略ブロック図である。なお、本実施形態においても説明の簡単化のためにSINRの高い順に受信信号yの成分をソートしたものとして説明を行う。
第k信号分離装置12c-kは、空間フィルタリング部13c-k、仮判定信号出力部14-k、重み係数更新部15c-k及び位相雑音推定部16-kを備える。
図7は、第4の実施形態における光信号受信装置10cにおける第k信号分離装置12c-kの機能構成を表す概略ブロック図である。なお、本実施形態においても説明の簡単化のためにSINRの高い順に受信信号yの成分をソートしたものとして説明を行う。
第k信号分離装置12c-kは、空間フィルタリング部13c-k、仮判定信号出力部14-k、重み係数更新部15c-k及び位相雑音推定部16-kを備える。
第k信号分離装置12c-kは、空間フィルタリング部13b-k及び重み係数更新部15b-kに代えて空間フィルタリング部13c-k及び重み係数更新部15c-kを備える点で第k信号分離装置12b-k(例えば、k=2の場合、第二信号分離装置12b-2)と構成が異なる。第k信号分離装置12c-kにおける他の構成は第k信号分離装置12b-kと同様である。そのため、第k信号分離装置12c-kの全体の説明は省略し、空間フィルタリング部13c-k及び重み係数更新部15c-kについて説明する。
空間フィルタリング部13c-kは、受信部11から出力されたNR個の信号と、第一信号分離装置12-1から第(k-1)信号分離装置12c-(k-1)までによって出力された第一仮判定信号x1
-から第(k-1)仮判定信号x(k-1)
-までとの合計(NR+k-1)個の信号を入力する。空間フィルタリング部13c-kは、入力した(NR+k-1)個の信号と、重み係数更新部15c-kから出力された第k重み係数wT
kと、位相雑音推定部16-kによって推定された位相雑音とを乗算することによって等化信号を分離する。例えば、空間フィルタリング部13c-kは、以下の式(14)に基づいて、等化信号xk^を分離する。
重み係数更新部15c-kは、空間フィルタリング部13c-kから出力された等化信号xk^を入力する。重み係数更新部15c-kは、LMS法やRLS法やCMA法などの適応アルゴリズムと、入力した等化信号xk^を用いて第k重み係数wT
kを更新する。例えば、LMS法を用いる場合、重み係数更新部15c-kは以下の式(15)のように第k重み係数wT
kを更新する。
次に、空間フィルタリング部13c-kの詳細について説明する。空間フィルタリング部13c-kは、位相補正部134-k、係数乗算部135-k、乗算器136-k及び演算器137-kを備える。
演算器137-kは、位相雑音推定部16-kによって推定された位相雑音(図7におけるexp(-1j*θk)に相当)から位相雑音補正(図7におけるexp(1j*θk)に相当)を求める。位相補正部134-kは、入力した(NR+k-1)個の信号のうち(k-1)個の信号と、演算器137-kによって求められた位相雑音補正とを用いて、位相補正を行う。例えば、位相補正部134-kは、以下の式(16)に基づいて位相補正を行う。
演算器137-kは、位相雑音推定部16-kによって推定された位相雑音(図7におけるexp(-1j*θk)に相当)から位相雑音補正(図7におけるexp(1j*θk)に相当)を求める。位相補正部134-kは、入力した(NR+k-1)個の信号のうち(k-1)個の信号と、演算器137-kによって求められた位相雑音補正とを用いて、位相補正を行う。例えば、位相補正部134-kは、以下の式(16)に基づいて位相補正を行う。
式(16)において、pは整数であって、1≦p≦(k-1)である。例えば、図7の場合、位相補正部134-kは、第一信号分離装置12-1から出力された#NR+1の信号と、位相雑音補正とを乗算することによって、#NR+1の信号の位相補正を行う。また、位相補正部134-kは、第(k-1)信号分離装置12c-(k-1)から出力された#NR+(k-1)の信号と、位相雑音補正とを乗算することによって、#NR+(k-1)の信号の位相補正を行う。位相補正部134-kは、位相補正後の(k-1)個の信号を係数乗算部135-kに出力する。なお、位相補正部134-kに入力される(k-1)個の信号は、第一信号分離装置12c-1から第(k-1)信号分離装置12c-(k-1)までで出力された第一仮判定信号x1
-から第(k-1)仮判定信号x(k-1)
-である。
係数乗算部135-kは、入力した(NR+k-1)個の信号のうちNR個の信号と、位相補正後の(k-1)個の信号と、重み係数更新部15c-kから出力された第k重み係数wT kとを乗算する。
乗算器136-kは、係数乗算部135-kから出力された出力信号と、位相雑音推定部16-kによって推定された位相雑音とを乗算することによって等化信号xk^を生成する。乗算器136-kは、生成した等化信号xk^を仮判定信号出力部14-k、重み係数更新部15c-k及び位相雑音推定部16-kに出力する。
係数乗算部135-kは、入力した(NR+k-1)個の信号のうちNR個の信号と、位相補正後の(k-1)個の信号と、重み係数更新部15c-kから出力された第k重み係数wT kとを乗算する。
乗算器136-kは、係数乗算部135-kから出力された出力信号と、位相雑音推定部16-kによって推定された位相雑音とを乗算することによって等化信号xk^を生成する。乗算器136-kは、生成した等化信号xk^を仮判定信号出力部14-k、重み係数更新部15c-k及び位相雑音推定部16-kに出力する。
以上のように構成された光信号受信装置10cによれば、第1の実施形態及び第2の実施形態と同様の効果を得ることができる。
<変形例>
第k信号分離装置12c-kが備える仮判定信号出力部14-kは、誤り訂正の機能を有するものと置き換えてもよい。すなわち、仮判定信号出力部14-kが、第2の実施形態と同様に対数尤度比計算部、デインタリーバ、誤り訂正復号部、インタリーバ及びマッピング回路を備えてもよい。
第k信号分離装置12c-kが備える仮判定信号出力部14-kは、誤り訂正の機能を有するものと置き換えてもよい。すなわち、仮判定信号出力部14-kが、第2の実施形態と同様に対数尤度比計算部、デインタリーバ、誤り訂正復号部、インタリーバ及びマッピング回路を備えてもよい。
(第5の実施形態)
図8および図9は、第5の実施形態における光信号受信装置に設けられた信号分離装置の機能構成を表す概略ブロック図である。本実施形態の光信号受信装置は、図1に示した第一信号分離装置12-1および第k信号分離装置12-kに代えて、第一信号分離装置12d-1および第k信号分離装置12d-kを備える点で、第1の実施形態における光信号受信装置とは構成が異なっている。
図8および図9は、第5の実施形態における光信号受信装置に設けられた信号分離装置の機能構成を表す概略ブロック図である。本実施形態の光信号受信装置は、図1に示した第一信号分離装置12-1および第k信号分離装置12-kに代えて、第一信号分離装置12d-1および第k信号分離装置12d-kを備える点で、第1の実施形態における光信号受信装置とは構成が異なっている。
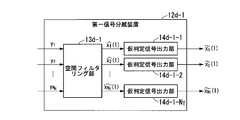
図8は第一信号分離装置12d-1の機能構成を表す概略ブロック図であり、図9は第k信号分離装置12d-kの機能構成を表す概略ブロック図である。第一信号分離装置12d-1は、空間フィルタリング部13d-1と仮判定信号出力部14d-1-1~14d-1-NTを備える。第k信号分離装置12d-kは、空間フィルタリング部13d-kと仮判定信号出力部14d-k-1~14d-k-NTを備える。空間フィルタリング部13d-1および空間フィルタリング部13d-kは、それぞれ、NT個の空間フィルタリング部によって構成される。
次に、第一信号分離装置12d-1および第k信号分離装置12d-kの処理を説明する。受信信号系列y1~yNR(“1”および“NR”は下付き添え字)は、第一信号分離装置12d-1の空間フィルタリング部13d-1に入力される。空間フィルタリング部13d-1は、受信信号系列y1~yNRに重み係数を乗算し、等化出力系列x1^(1)~xNT^(1)(等化信号)(“1”および“NT”は下付き添え字)を出力する。ここで、括弧内の数字(この場合は、“1”)は信号分離装置の番号を表す。仮判定信号出力部14d-1-1~14d-1-NTは、それぞれ、等化出力系列x1^(1)~xNT^(1)を入力し、入力した信号を仮判定し、判定結果を仮判定信号系列x1~(1)~xNT
~(1)(~は“x1”および“xNT”の上に付される)として出力する。ここで、仮判定とは、等化信号として尤もらしい信号を判定することを意味する。なお、判定の処理の一例は第1の実施形態で説明した通りである。
次に、受信信号系列y1~yNRと、仮判定信号系列x1~(1)~xNT
~(1)は、図9に示す第二信号分離装置12d-2(この場合、図9におけるk=2)の空間フィルタリング部13d-2に入力される。空間フィルタリング部13d-2は、受信信号系列y1~yNRおよび仮判定信号系列x1~(1)~xNT
~(1)に重み係数を乗算し、等化出力系列x1^(2)~xNT^(2)を出力する。仮判定信号出力部14d-2-1~14d-2-NTは、等化出力系列x1^(2)~xNT^(2)を入力とし、入力した信号を仮判定し、判定結果をそれぞれ仮判定信号系列x1~(2)~xNT
~(2)として出力する。第三信号分離装置12d-3(図9におけるk=3)以降の信号検出処理は、第二信号分離装置12d-2と同様に行われる。
上記のように、第一信号分離装置12d-1および第k信号分離装置12d-kを用いて、信号検出処理を複数ステージで行うことにより、信号検出精度を高めながら、受信信号に重畳した干渉成分を効果的に取り除くことができる。このとき、kは信号検出処理の繰り返し回数に相当し、事業者が設定できる数となる。本実施形態では、kの上限値をP(「所定回数」)と置く。繰り返し処理を行う装置は多くがフィードバック構造を備えるが、本実施形態では、複数個の信号分離装置を(縦続)接続することにより、等価的に繰り返し処理を行うことができる。
上記の処理がPステージ(すなわち、第P信号分離装置12d-P)まで行われ、最終的に、信号系列x1~~xNT
~が出力される。
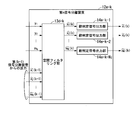
図10は、空間フィルタリング部13d-kを構成する第(k-i)空間フィルタリング部13d-k-iの機能構成の一例を表す概略ブロック図である(iは1以上NT以下の整数)。第(k-i)空間フィルタリング部13d-k-iは、i番目の信号検出処理を行う。第(k-i)空間フィルタリング部13d-k-iは、第一乗算部131d-kと、乗算器131da-k(第三乗算部)と、第二乗算部132d-kと、加算器133d-k(加算部)と、重み係数更新部15d-kと、位相雑音推定部16d-kを備える。図9に示す第k信号分離装置12d-k内における空間フィルタリング部13d-kは、第(k-i)空間フィルタリング部がNT個組み合わされて構成される。
次に、図10に示す第(k-i)空間フィルタリング部13d-k-iの信号検出処理について説明する。第一乗算部131d-kは、受信信号系列y1~yNRに対して重み係数更新部15d-kから出力される重み係数を乗算し、乗算結果を出力する。第二乗算部132d-kは、仮判定信号系列x1~(k-1)~xNT
~(k-1)に対して重み係数更新部15d-kから出力される重み係数を乗算し、乗算結果を出力する。乗算器131da-kは、第一乗算部131d-kから出力される乗算結果と、位相雑音推定部16d-kから出力される位相雑音に相当するexp(-1j*θ)の項を乗算する。加算器133d-kは、乗算器131da-kから出力される乗算結果と、第二乗算部132d-kから出力される乗算結果を足し合わせて、等化出力系列xi^(k)を出力する。
位相雑音推定部16d-kと重み係数更新部15d-kは、等化出力系列xi^(k)に基づいて教師データを作成し、所定のアルゴリズムに則り、それぞれ、位相雑音の推定と重み係数の更新を行う。所定のアルゴリズムとして、位相雑音推定部16d-kでは例えばビタビ・ビタビ法が用いられ、重み係数更新部15d-kでは例えば確率勾配法が用いられる。
図11は、空間フィルタリング部13d-kを構成する第(k-i)空間フィルタリング部13d-k-iの機能構成の他の例を表す概略ブロック図である。図11に示す第(k-i)空間フィルタリング部は、第一乗算部131d-kと、乗算器131da-kと、第二乗算部132d-kと、加算器133d-kを備えず、位相補正部134d-kと係数乗算部135d-kと乗算器136d-kと演算器137d-kを備える点で、図10に示す第(k-i)空間フィルタリング部と構成が異なっている。
次に、図11に示す第(k-i)空間フィルタリング部13d-k-iの信号検出処理について説明する。演算器137d-kは、位相雑音推定部16d-kによって推定された位相雑音(図11におけるexp(-1j*θ)に相当)から位相雑音補正(図11におけるexp(1j*θ)に相当)を求める。位相補正部134d-kは、仮判定信号系列x1~(k-1)~xNT
~(k-1)に対して、それぞれ位相雑音補正に相当するexp(1j*θ)の項を乗算することで、仮判定信号系列x1~(k-1)~xNT
~(k-1)に対して実効的に位相雑音を付加して、位相補正を行う。係数乗算部135d-kは、位相雑音補正後の仮判定信号系列および受信信号系列y1~yNRに対して、重み係数更新部15d-kから出力される重み係数を乗算し、乗算結果を出力する。乗算器136d-kは、係数乗算部135d-kから出力される乗算結果と、位相雑音推定部16d-kによって推定された位相雑音に相当するexp(-1j*θ)の項、とを乗算し、等化出力系列xi^(k)を出力する。
重み係数更新部15d-kと位相雑音推定部16d-kは、図10に示す同名の機能部と同じ処理を行うため、ここではそれらの説明を省略する。
重み係数更新部15d-kと位相雑音推定部16d-kは、図10に示す同名の機能部と同じ処理を行うため、ここではそれらの説明を省略する。
<変形例>
仮判定信号出力部14d-1-1~14d-1-NTおよび仮判定信号出力部14d-k-1~14d-k-NTは、誤り訂正の機能を有するものと置き換えてもよい。すなわち、これら仮判定信号出力部のそれぞれが、第2の実施形態と同様に、対数尤度比計算部、デインタリーバ、誤り訂正復号部、インタリーバ及びマッピング回路を備えてもよい。
仮判定信号出力部14d-1-1~14d-1-NTおよび仮判定信号出力部14d-k-1~14d-k-NTは、誤り訂正の機能を有するものと置き換えてもよい。すなわち、これら仮判定信号出力部のそれぞれが、第2の実施形態と同様に、対数尤度比計算部、デインタリーバ、誤り訂正復号部、インタリーバ及びマッピング回路を備えてもよい。
(第6の実施形態)
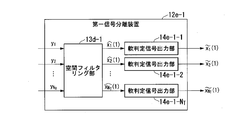
図12および図13は、第6の実施形態における光信号受信装置に設けられた信号分離装置の機能構成を表す概略ブロック図である。図12は第一信号分離装置12e-1の機能構成を表す概略ブロック図であり、図13は第k信号分離装置12e-kの機能構成を表す概略ブロック図である。これらの信号分離装置は、第5の実施形態における第一信号分離装置12d-1および第k信号分離装置12d-k内の仮判定信号出力部14d-1-1~14d-1-NTおよび仮判定信号出力部14d-k-1~14d-k-NTの代わりに、軟判定信号出力部14e-1-1~14e-1-NTおよび軟判定信号出力部14e-k-1~14e-k-NTを備える点で、第5の実施形態における信号分離装置と構成が異なっている。
図12および図13は、第6の実施形態における光信号受信装置に設けられた信号分離装置の機能構成を表す概略ブロック図である。図12は第一信号分離装置12e-1の機能構成を表す概略ブロック図であり、図13は第k信号分離装置12e-kの機能構成を表す概略ブロック図である。これらの信号分離装置は、第5の実施形態における第一信号分離装置12d-1および第k信号分離装置12d-k内の仮判定信号出力部14d-1-1~14d-1-NTおよび仮判定信号出力部14d-k-1~14d-k-NTの代わりに、軟判定信号出力部14e-1-1~14e-1-NTおよび軟判定信号出力部14e-k-1~14e-k-NTを備える点で、第5の実施形態における信号分離装置と構成が異なっている。
軟判定信号出力部14e-1-1~14e-1-NTおよび軟判定信号出力部14e-k-1~14e-k-NTは、それぞれ、空間フィルタリング部13d-1および空間フィルタリング部13d-kから出力された等化出力系列x1^(1)~xNT^(1)および等化出力系列x1^(k)~xNT^(k)を入力とする。そして、軟判定信号出力部14e-1-1~14e-1-NTおよび14e-k-1~14e-k-NTは、入力された等化出力系列に予め付加された誤り訂正符号のパリティなどを利用して、送信ビットや送信シンボルなどの送信信号情報の尤度情報を算出し、尤度情報に基づく軟判定シンボルを生成し、生成された軟判定シンボルをそれぞれ等化出力系列x1^(1)~xNT^(1)および等化出力系列x1^(k)~xNT^(k)として出力する。その他の信号の入出力の関係および各機能部の処理は第5の実施形態と同様であるので、ここではそれらの説明を省略する。
図14は、本実施形態における各軟判定信号出力部の機能構成を表す概略ブロック図である。各軟判定信号出力部は、対数尤度比計算部141eと、デインタリーバ142eと、誤り訂正復号部143eと、インタリーバ144eと、軟判定シンボル生成部146eと、減算器147eを備える。
対数尤度比計算部141eは、空間フィルタリング部13d-1または空間フィルタリング部13d-kから出力された等化出力系列xi^(k)を入力とし、等化出力系列を構成する各ビットについて、0が送信された確率と1が送信された確率との対数尤度比La(bi
t)を算出する。ここで、bi
tは、i番目の送信信号系列のt番目のビットを表す。対数尤度比計算部141eは、算出した対数尤度比La(bi
t)をデインタリーバ142eに出力する。デインタリーバ142eは、入力された対数尤度比La(bi
t)をビット毎に並び替え、La(ci
t)を出力する。ここで、ci
tはbi
tを並び替えたバイナリ系列である。デインタリーバ142eは、並び替え後の対数尤度比La(ci
t)を誤り訂正復号部143eおよび減算器147eに出力する。
誤り訂正復号部143eは、光信号送信装置側で用いられた誤り訂正符号と同様の誤り訂正符号に基づき、適切な復号方法を用いて、各ビットについて事後対数尤度比Lp(ci
t)を算出する。ここで、ci
tは、i番目の送信信号系列のt番目のビットを表す。本実施形態における誤り訂正符号とは、例えばハミング符号、BCH符号、LDPC符号及び畳み込み符号等の特定の誤り訂正符号に限定されることなく、あらゆる訂正符号が用いられても良い。
次に、減算器147eは、誤り訂正復号部143eから出力される事後対数尤度比Lp(ci
t)から誤り訂正復号部143eへの入力でもあるLa(ci
t)を減算することによって、次式に示すように、外部対数尤度比Le(ci
t)を算出する。
Le(ci t)=Lp(ci t)-La(ci t) …(17)
Le(ci t)=Lp(ci t)-La(ci t) …(17)
減算器147eは、外部対数尤度比Le(ci
t)をインタリーバ144eへ出力する。インタリーバ144eは、外部対数尤度比Le(ci
t)を並び替えてLe(bi
t)を出力する。
Le(bi
t)は軟判定シンボル生成部146eへ入力される。軟判定シンボル生成部146eは、入力されたLe(bi
t)から軟判定シンボル系列bi
t
~を生成する。軟判定シンボル生成部146eでは、例えば送信信号系列がBPSK(Binary Phase Shift Keying)変調されているとき、次式に従って、軟判定シンボル系列を生成する。
bi t ~=tanh(bi t) …(18)
bi t ~=tanh(bi t) …(18)
(第7の実施形態)
図15は、第7の実施形態における光信号受信装置に設けられた信号分離装置の機能構成を表す概略ブロック図である。本実施形態の信号分離装置12fは、空間フィルタリング部13f及び判定信号出力部14f-1~14f-NTを備える。空間フィルタリング部13fは、第5実施形態で説明した空間フィルタリング部または第6実施形態で説明した空間フィルタリングと同様の機能を有する。判定信号出力部14f-1~14f-NTは、上述した実施形態における仮判定信号出力部または軟判定信号出力部である。
図15は、第7の実施形態における光信号受信装置に設けられた信号分離装置の機能構成を表す概略ブロック図である。本実施形態の信号分離装置12fは、空間フィルタリング部13f及び判定信号出力部14f-1~14f-NTを備える。空間フィルタリング部13fは、第5実施形態で説明した空間フィルタリング部または第6実施形態で説明した空間フィルタリングと同様の機能を有する。判定信号出力部14f-1~14f-NTは、上述した実施形態における仮判定信号出力部または軟判定信号出力部である。
本実施形態の信号分離装置12fは、繰り返し処理を基本とし、フィードバック構造を備える。
次に、本実施形態の信号分離装置12fにおける信号検出処理について説明する。まず、信号検出処理を繰り返し行う回数の上限値Pを設定する。次に、一回目の信号検出処理では、受信信号系列y1~yNRが空間フィルタリング部13fに入力される。この場合、空間フィルタリング部13fは、判定信号出力部14f-1~14f-NTからフィードバックされた信号は使用しない。空間フィルタリング部13fは、受信信号系列y1~yNRに重み係数を乗算し、等化出力系列x1^(1)~xNT^(1)を出力する。ここで、括弧内の数字は繰り返しの回数を表す(この場合は、一回目の信号検出処理であるため、“1”)。次に、判定信号出力部14f-1~14f-NTは、それぞれ、等化出力系列x1^(1)~xNT^(1)を入力とし、入力された等化出力系列に対して判定(すなわち、上述した仮判定信号出力部または軟判定信号出力部による判定)を行い、得られた仮判定信号系列または軟判定信号系列を判定信号系列x1~(1)~xNT
~(1)として空間フィルタリング部13fに出力する。
以降のk回目の信号検出処理では、受信信号系列y1~yNRおよび判定信号出力部14f-1~14f-NTからフィードバックされた判定信号系列x1~(k-1)~xNT
~(k-1)が、空間フィルタリング部13fに入力される。例えば、2回目の信号検出処理(k=2)では、受信信号系列y1~yNRおよび判定信号出力部14f-1~14f-NTからフィードバックされた判定信号系列x1~(1)~xNT
~(1)が、空間フィルタリング部13fに入力される。空間フィルタリング部13fは、受信信号系列y1~yNRおよび判定信号系列x1~(k-1)~xNT
~(k-1)に対して重み係数を乗算し、等化出力系列x1^(k)~xNT^(k)を出力する。判定信号出力部14f-1~14f-NTは、それぞれ、等化出力系列x1^(k)~xNT^(k)を入力とし、入力された等化出力系列に対して判定を行い、得られた仮判定信号系列または軟判定信号系列を空間フィルタリング部13fにフィードバックする。
上記の信号検出処理がk=Pに対して行われるまで繰り返されると、信号分離装置12fは、判定信号系列x1~~xNT ~を出力する。
上記の信号検出処理がk=Pに対して行われるまで繰り返されると、信号分離装置12fは、判定信号系列x1~~xNT ~を出力する。
第7の実施形態の効果を確認するための伝送シミュレーションを行った結果を図16に示す。図16では、伝送路モデルとして、2×2のMIMOシステムを想定した。2つの光信号送信装置から独立したQPSK信号を送信し、信号対雑音比(SNR)を変化させたときの両信号の平均ビットエラーレートを記録した。図16には、従来方式と第7の実施形態のビットエラーレートの比較結果が示されている。図16からは、第7の実施形態を適用することによって、ビットエラーレート10-2においてSNRの利得(すなわち、SNR利得)として約1.5dBが得られていることが分かる。
上記の各実施形態では、光信号受信装置が主に時間領域の処理を行うものとして記述したが、各実施形態の光信号受信装置における時間領域の処理を周波数領域の処理に置き換えてもよい。
上記の各実施形態における光信号受信装置を無線通信システム、衛星通信システム等の光通信システム以外の通信システム上で実現してもよい。また、上述したシングルキャリア通信システムに限定することなく、OFDM(Orthogonal Frequency Division Multiplexing)等のマルチキャリア通信システム、CDMA(Code Division Multiplexing Access)等の符号化拡散通信システムに対しても上記の各実施形態は同様に実施できる。
また別の例として、上述した光信号受信装置をコンピュータで実現してもよい。その場合、これら装置の機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録し、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませて実行させ、光信号受信装置を実現してもよい。なお、ここでいうコンピュータシステムとは、OS(Operating System)や周辺機器等のハードウェアを含むものとする。また、コンピュータ読み取り可能な記録媒体とは、フレキシブルディスク、光磁気ディスク、ROM(Read Only Memory)、CD(Compact Disc)-ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。
さらに、コンピュータ読み取り可能な記録媒体とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時間の間、動的にプログラムを保持するもの、その場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間プログラムを保持しているものも含んでもよい。また、上記プログラムは、前述した機能の一部を実現するためのものであっても良く、さらに前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであってもよい。また、光信号受信装置は、PLD(Programmable Logic Device)、FPGA(Field Programmable Gate Array)、DSP(Digital Signal Processor)等のハードウェアを用いて実現されるものであってもよい。
以上、この発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
本発明は例えば光通信に適用することが可能である。本発明によれば、高精度で多重信号を分離することが可能となる。
10…光信号受信装置
11…受信部
12…信号分離装置
12-1、12a-1、12d-1…第一信号分離装置
12-2、12a-2…第二信号分離装置
12-k、12b-k、12d-k…第k信号分離装置
12f…信号分離装置
13-1、13-2、13b-k、13d-1、13d-k、13f…空間フィルタリング部
131-k、131d-k…第一乗算部
131a-k、131da-k、136d-k…乗算器
132-k、132d-k…第二乗算部
133-k、133d-k…加算器
134-k、134d-k…位相補正部
135-k、135d-k…係数乗算部
136-k…乗算器
137-k…演算器
14-1~14-2、14a-1~14a-2、14a-k、14d-1-1~14d-1-NT、14d-k-1~14d-k-NT…仮判定信号出力部
14e-1-1~14e-1-NT、14e-k-1~14e-k-NT…軟判定信号出力部
14f-1~14f-NT…判定信号出力部
141-1~141-2、141e…対数尤度比計算部
142-1~142-2、142e…デインタリーバ
143-1~143-2、143e…誤り訂正復号部
144-1~144-2、144e…インタリーバ
145-1~145-2…マッピング回路
146e…軟判定シンボル生成部
147e…減算器
15-1、15-2、15b-k、15c-k、15d-k…重み係数更新部
16-k、16d-k…位相雑音推定部
11…受信部
12…信号分離装置
12-1、12a-1、12d-1…第一信号分離装置
12-2、12a-2…第二信号分離装置
12-k、12b-k、12d-k…第k信号分離装置
12f…信号分離装置
13-1、13-2、13b-k、13d-1、13d-k、13f…空間フィルタリング部
131-k、131d-k…第一乗算部
131a-k、131da-k、136d-k…乗算器
132-k、132d-k…第二乗算部
133-k、133d-k…加算器
134-k、134d-k…位相補正部
135-k、135d-k…係数乗算部
136-k…乗算器
137-k…演算器
14-1~14-2、14a-1~14a-2、14a-k、14d-1-1~14d-1-NT、14d-k-1~14d-k-NT…仮判定信号出力部
14e-1-1~14e-1-NT、14e-k-1~14e-k-NT…軟判定信号出力部
14f-1~14f-NT…判定信号出力部
141-1~141-2、141e…対数尤度比計算部
142-1~142-2、142e…デインタリーバ
143-1~143-2、143e…誤り訂正復号部
144-1~144-2、144e…インタリーバ
145-1~145-2…マッピング回路
146e…軟判定シンボル生成部
147e…減算器
15-1、15-2、15b-k、15c-k、15d-k…重み係数更新部
16-k、16d-k…位相雑音推定部
Claims (11)
- 複数の受信信号から特定の信号を分離する少なくとも1つの信号分離装置を備え、
前記少なくとも1つの信号分離装置のそれぞれは、
少なくとも1つの等化信号を分離する空間フィルタリング部と、
前記等化信号を判定して第1の判定信号を生成し、生成された前記第1の判定信号を出力する判定信号出力部と
を備え、
前記空間フィルタリング部は、前記複数の受信信号、および、前記判定信号出力部から出力される前記第1の判定信号または他の信号分離装置から出力される第2の判定信号のいずれかのうち、少なくとも前記複数の受信信号と、所定の重み係数とを乗算することによって、前記少なくとも1つの等化信号を分離する信号受信装置。 - 前記少なくとも1つの信号分離装置は複数の信号分離装置であって、
前記空間フィルタリング部は、前記複数の受信信号および前記第2の判定信号のうち、少なくとも前記複数の受信信号と、前記所定の重み係数とを乗算することによって、前記少なくとも1つの等化信号として単一の等化信号を分離し、
前記判定信号出力部は、前記等化信号として尤もらしい信号を表す仮判定信号を前記第1の判定信号として生成する仮判定信号出力部であり、
k(kは2以上の整数)番目の信号分離装置の空間フィルタリング部では、前記複数の受信信号であるNR(NRは2以上の整数)個の受信信号と、一番目の信号分離装置から(k-1)番目の信号分離装置までで得られた前記第2の判定信号としての(k-1)個の仮判定信号との合計(NR+k-1)個の信号を入力し、前記複数の受信信号から信号kを分離する請求項1に記載の信号受信装置。 - 前記少なくとも1つの信号分離装置は複数の信号分離装置であって、
前記空間フィルタリング部は、前記複数の受信信号および前記第2の判定信号のうち、少なくとも前記複数の受信信号と、前記所定の重み係数とを乗算することによって、前記少なくとも1つの等化信号として複数の等化信号を分離し、
k(kは2以上の整数)番目の信号分離装置の空間フィルタリング部では、前記複数の受信信号であるNR(NRは2以上の整数)個の受信信号を入力するとともに、(k-1)番目の信号分離装置の判定信号出力部により生成される前記第1の判定信号を前記第2の判定信号として入力し、前記複数の受信信号から前記特定の信号を分離する請求項1に記載の信号受信装置。 - 前記判定信号出力部は、前記等化信号として尤もらしい信号を表す仮判定信号を前記第1の判定信号として生成する仮判定信号出力部である請求項3に記載の信号受信装置。
- 前記判定信号出力部は、送信信号情報の尤度情報を算出し、前記尤度情報に基づく軟判定シンボルを前記第1の判定信号として生成する軟判定信号出力部である請求項3に記載の信号受信装置。
- 前記少なくとも1つの信号分離装置は単一の信号分離装置であって、
前記判定信号出力部は、前記第1の判定信号を前記空間フィルタリング部に出力し、
前記空間フィルタリング部は、前記複数の受信信号、および、前記判定信号出力部から出力される前記第1の判定信号のうち、少なくとも前記複数の受信信号と、前記所定の重み係数とを乗算することによって、前記少なくとも1つの等化信号として複数の等化信号を分離し、
前記判定信号出力部は、前記複数の受信信号に対して、前記第1の判定信号を所定回数生成すると、前記第1の判定信号を前記特定の信号として出力する請求項1に記載の信号受信装置。 - 前記判定信号出力部は、誤り訂正復号部を備える、請求項1から請求項6のいずれか1項に記載の信号受信装置。
- 前記空間フィルタリング部が出力する前記少なくとも1つの等化信号に基づいて、前記少なくとも1つの等化信号の位相雑音を推定し、推定された前記位相雑音を出力する位相雑音推定部をさらに備える、請求項1から請求項7のいずれか1項に記載の信号受信装置。
- 前記空間フィルタリング部は、
前記複数の受信信号に係数を乗算する第一乗算部と、
前記第1の判定信号または前記第2の判定信号に係数を乗算する第二乗算部と、
前記位相雑音推定部から出力される前記位相雑音と前記第一乗算部の出力を乗算する第三乗算部と、
前記第二乗算部の出力と前記第三乗算部の出力を加算する加算部と
を備える、請求項8に記載の信号受信装置。 - 前記空間フィルタリング部は、
前記位相雑音推定部から出力される前記位相雑音と前記第1の判定信号または前記第2の判定信号とを乗算する位相補正部と、
前記複数の受信信号および前記位相補正部の出力信号に係数を乗算する係数乗算部と、
を備える、請求項8に記載の信号受信装置。 - 複数の受信信号から特定の信号を分離する少なくとも1つの信号分離装置のそれぞれが、少なくとも1つの等化信号を分離する空間フィルタリングステップと、
前記等化信号を判定して第1の判定信号を生成し、生成された前記第1の判定信号を出力する判定信号出力ステップと、
を有し、
前記空間フィルタリングステップでは、前記複数の受信信号、および、前記判定信号出力ステップにおいて出力される前記第1の判定信号または他の信号分離装置から出力される第2の判定信号のいずれかのうち、少なくとも前記複数の受信信号と、所定の重み係数とを乗算することによって、前記少なくとも1つの等化信号を分離する信号分離方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/492,917 US10985846B2 (en) | 2017-04-13 | 2018-03-08 | Signal separating apparatus and signal separating method |
| JP2019512385A JP6741864B2 (ja) | 2017-04-13 | 2018-03-08 | 信号分離装置及び信号分離方法 |
| CN201880024028.5A CN110463092B (zh) | 2017-04-13 | 2018-03-08 | 信号分离装置和信号分离方法 |
| US17/197,754 US11552714B2 (en) | 2017-04-13 | 2021-03-10 | Signal separating apparatus and signal separating method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-079870 | 2017-04-13 | ||
| JP2017079870 | 2017-04-13 |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US16/492,917 A-371-Of-International US10985846B2 (en) | 2017-04-13 | 2018-03-08 | Signal separating apparatus and signal separating method |
| US17/197,754 Division US11552714B2 (en) | 2017-04-13 | 2021-03-10 | Signal separating apparatus and signal separating method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018190041A1 true WO2018190041A1 (ja) | 2018-10-18 |
Family
ID=63792366
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/008953 WO2018190041A1 (ja) | 2017-04-13 | 2018-03-08 | 信号分離装置及び信号分離方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US10985846B2 (ja) |
| JP (1) | JP6741864B2 (ja) |
| CN (1) | CN110463092B (ja) |
| WO (1) | WO2018190041A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109656356A (zh) * | 2018-11-13 | 2019-04-19 | 天津大学 | 一种ssvep脑-机接口的异步控制系统 |
| JP2020136834A (ja) * | 2019-02-15 | 2020-08-31 | 富士通株式会社 | 適応等化回路および光受信器 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10985846B2 (en) * | 2017-04-13 | 2021-04-20 | Nippon Telegraph And Telephone Corporation | Signal separating apparatus and signal separating method |
| US11881881B2 (en) * | 2019-11-28 | 2024-01-23 | Ricoh Company, Ltd. | Determination apparatus, biomagnetism measuring apparatus, and determination method |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160021556A1 (en) * | 2014-07-18 | 2016-01-21 | Samsung Electronics Co., Ltd. | Layered Detection Method and Apparatus for QAM-FBMC System |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5566209A (en) * | 1994-02-10 | 1996-10-15 | Telefonaktiebolaget Lm Ericsson | Transceiver algorithms of antenna arrays |
| DK0846378T3 (da) * | 1995-08-22 | 2000-04-17 | Thomson Csf | Fremgangsmåde og indretning til rumlig multipleksning og demultipleksning af radioelektriske signaler i et SDMA mobilradios |
| FR2742619B1 (fr) * | 1995-12-15 | 1998-02-06 | Thomson Csf | Procede d'egalisation multicapteur permettant une reception multicapteur en presence d'interferences et de multitrajets de propagation, et recepteur pour sa mise en oeuvre |
| FR2758926B1 (fr) * | 1997-01-24 | 1999-04-30 | France Telecom | Procede d'egalisation multicapteurs dans un recepteur radioelectrique comportant un nombre determine de voies de reception et recepteur correspondant |
| US6711528B2 (en) * | 2002-04-22 | 2004-03-23 | Harris Corporation | Blind source separation utilizing a spatial fourth order cumulant matrix pencil |
| US7167568B2 (en) * | 2002-05-02 | 2007-01-23 | Microsoft Corporation | Microphone array signal enhancement |
| KR100539248B1 (ko) * | 2004-02-05 | 2005-12-27 | 삼성전자주식회사 | 결정 피드백 이퀄라이저 및 피드백 필터 계수 업데이트 방법 |
| US7580453B2 (en) * | 2006-01-25 | 2009-08-25 | Mediatek Inc. | Method and apparatus for equalization |
| US7885688B2 (en) * | 2006-10-30 | 2011-02-08 | L-3 Communications Integrated Systems, L.P. | Methods and systems for signal selection |
| US20080240230A1 (en) * | 2007-03-29 | 2008-10-02 | Horizon Semiconductors Ltd. | Media processor with an integrated TV receiver |
| US8094708B2 (en) * | 2007-11-21 | 2012-01-10 | Samsung Electronics Co., Ltd. | Receiver with multiple antennas and method of receiving signals |
| KR101513889B1 (ko) * | 2008-02-14 | 2015-05-20 | 삼성전자주식회사 | 멀티 빔 결합을 이용한 스위치 빔 포밍 장치 및 방법 |
| US8779979B2 (en) * | 2008-11-13 | 2014-07-15 | Samsung Electronics Co., Ltd. | Multi-antenna signal receiving device processing multi-path interference |
| US20120147942A1 (en) * | 2010-12-10 | 2012-06-14 | Futurewei Technologies, Inc. | System and Method for Signaling and Detecting in Wireless Communications Systems |
| CN102364882A (zh) * | 2011-11-18 | 2012-02-29 | 北京航空航天大学 | 一种基于直接序列cdma-uwb的认知无线电系统接收机 |
| CN102835040B (zh) * | 2012-06-11 | 2015-01-07 | 华为技术有限公司 | 微波mimo系统中接收信号的均衡方法和均衡器 |
| JPWO2015107942A1 (ja) * | 2014-01-14 | 2017-03-23 | シャープ株式会社 | 基地局装置および端末装置 |
| CN105577593B (zh) * | 2016-01-18 | 2018-12-25 | 华南师范大学 | 一种基于非判决辅助的次符号光相位噪声抑制方法 |
| SG11201802247XA (en) * | 2016-12-09 | 2018-07-30 | Hitachi Int Electric Inc | Marine intrusion detection system and method |
| FR3061617A1 (fr) * | 2016-12-29 | 2018-07-06 | Thales | Procede de lutte anti-interferences par filtrage spatial ou filtrage spatio-temporel dans un recepteur multi-voies |
| US10985846B2 (en) * | 2017-04-13 | 2021-04-20 | Nippon Telegraph And Telephone Corporation | Signal separating apparatus and signal separating method |
| GB2568038B (en) * | 2017-10-30 | 2020-12-02 | Imagination Tech Ltd | Systems and methods for processing a stream of data values |
| JP7201075B2 (ja) * | 2019-04-25 | 2023-01-10 | 日本電気株式会社 | 復調装置 |
| US11233568B1 (en) * | 2020-11-05 | 2022-01-25 | Ciena Corporation | Feedback equalization with delay compensation |
| KR20220073924A (ko) * | 2020-11-27 | 2022-06-03 | 삼성전자주식회사 | 백그라운드 트레이닝을 수행하는 수신기, 이를 포함하는 메모리 장치 및 이를 이용한 데이터 수신 방법 |
-
2018
- 2018-03-08 US US16/492,917 patent/US10985846B2/en active Active
- 2018-03-08 WO PCT/JP2018/008953 patent/WO2018190041A1/ja active Application Filing
- 2018-03-08 CN CN201880024028.5A patent/CN110463092B/zh active Active
- 2018-03-08 JP JP2019512385A patent/JP6741864B2/ja active Active
-
2021
- 2021-03-10 US US17/197,754 patent/US11552714B2/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160021556A1 (en) * | 2014-07-18 | 2016-01-21 | Samsung Electronics Co., Ltd. | Layered Detection Method and Apparatus for QAM-FBMC System |
Non-Patent Citations (2)
| Title |
|---|
| PHAM, KHANH ET AL.: "Low-Complexity SIC Detection Algorithm for Multiple-Input Multiple-Output Systems", IEEE TRANSACTIONS ON SIGNAL PROCESSING, vol. 63, no. 17, 9 June 2015 (2015-06-09), pages 4625 - 4633, XP055545451 * |
| SHIBAHARA, KOHKI ET AL.: "LDPC-Coded FMF Transmission Employing Unreplicated Successive Interference Cancellation for MDL-Impact Mitigation", 2017 EUROPEAN CONFERENCE ON OPTICAL COMMUNICATION (ECOC, 17 September 2017 (2017-09-17), pages 1 - 3, XP055545450 * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109656356A (zh) * | 2018-11-13 | 2019-04-19 | 天津大学 | 一种ssvep脑-机接口的异步控制系统 |
| JP2020136834A (ja) * | 2019-02-15 | 2020-08-31 | 富士通株式会社 | 適応等化回路および光受信器 |
| JP7230568B2 (ja) | 2019-02-15 | 2023-03-01 | 富士通株式会社 | 適応等化回路および光受信器 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110463092A (zh) | 2019-11-15 |
| US20200014469A1 (en) | 2020-01-09 |
| US20210218477A1 (en) | 2021-07-15 |
| CN110463092B (zh) | 2021-09-17 |
| JP6741864B2 (ja) | 2020-08-19 |
| JPWO2018190041A1 (ja) | 2019-11-07 |
| US10985846B2 (en) | 2021-04-20 |
| US11552714B2 (en) | 2023-01-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8385439B2 (en) | Polarization mode dispersion compensation in multilevel coded-modulation schemes using blast algorithm and iterative polarization cancellation | |
| JP3714910B2 (ja) | ターボ受信方法及びその受信機 | |
| WO2018190041A1 (ja) | 信号分離装置及び信号分離方法 | |
| US7991360B2 (en) | Receiver apparatus, receiving method, and wireless communication system | |
| RU2303330C1 (ru) | Способ приема сигнала в системе связи с несколькими каналами передачи и приема | |
| JP2012005134A (ja) | グループ単位のデマッピングを用いる繰り返しmimo受信機 | |
| EP1467531A1 (en) | System for channel equalization using a remodulation of an estimate of the received signal | |
| JP2008124843A (ja) | 無線受信装置 | |
| JP4191697B2 (ja) | ターボ受信方法及びその受信機 | |
| US9160436B1 (en) | Optimal decoding of transmit diversity code with varying channel characteristics | |
| US8446999B2 (en) | Receiving apparatus and communication system | |
| JP5288622B2 (ja) | 無線通信装置、無線通信システムおよび通信方法 | |
| US20070140370A1 (en) | Receiver and method for decoding a coded signal with the aid of a space-time coding matrix | |
| JP2008258899A (ja) | 受信装置および受信方法 | |
| WO2019161142A1 (en) | Stochastic interference cancellation | |
| Wu et al. | New detection algorithms based on the jointly Gaussian approach and successive interference cancelation for iterative MIMO systems | |
| JP5642046B2 (ja) | Mimo−ofdm伝送における受信装置及び受信方法 | |
| JP2011139294A (ja) | 送信装置および受信装置 | |
| KR100933053B1 (ko) | 다중 입출력 통신 시스템의 수신기 및 이를 이용한 신호검출 방법 | |
| Zhang et al. | An Iterative RBSF Kalman Equalizer for MIMO ISI Channels | |
| Li | Low-complexity iterative detection algorithms for multi-antenna systems | |
| Koca et al. | Broadband beamforming for joint interference cancellation and turbo equalization | |
| Nguyen et al. | Quantization Error Correction Schemes for Lattice-Reduction Aided MIMO Detectors | |
| JP2012191602A (ja) | 受信装置 | |
| Oestreich et al. | Performance and Complexity of Turbo Equalizers for optical coherent Gbit/s Transmission with optimal and suboptimal Detection Strategies |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18785044 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2019512385 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18785044 Country of ref document: EP Kind code of ref document: A1 |