WO2018179574A1 - 作業機械用油圧制御装置 - Google Patents
作業機械用油圧制御装置 Download PDFInfo
- Publication number
- WO2018179574A1 WO2018179574A1 PCT/JP2017/041316 JP2017041316W WO2018179574A1 WO 2018179574 A1 WO2018179574 A1 WO 2018179574A1 JP 2017041316 W JP2017041316 W JP 2017041316W WO 2018179574 A1 WO2018179574 A1 WO 2018179574A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- pilot
- hydraulic
- tank
- valve
- control device
- Prior art date
Links
- 239000003921 oil Substances 0.000 claims description 98
- 239000010720 hydraulic oil Substances 0.000 claims description 47
- 239000012530 fluid Substances 0.000 claims description 7
- 238000001514 detection method Methods 0.000 claims description 5
- 238000000034 method Methods 0.000 description 22
- 238000010992 reflux Methods 0.000 description 21
- 230000008569 process Effects 0.000 description 20
- 230000008929 regeneration Effects 0.000 description 19
- 238000011069 regeneration method Methods 0.000 description 19
- 230000007935 neutral effect Effects 0.000 description 8
- 230000001276 controlling effect Effects 0.000 description 6
- 238000010792 warming Methods 0.000 description 6
- 230000004044 response Effects 0.000 description 5
- 230000004043 responsiveness Effects 0.000 description 5
- 238000009412 basement excavation Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000008602 contraction Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 3
- 239000004020 conductor Substances 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000001172 regenerating effect Effects 0.000 description 2
- 239000004576 sand Substances 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 230000037396 body weight Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000005672 electromagnetic field Effects 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000036632 reaction speed Effects 0.000 description 1
- 230000003134 recirculating effect Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 239000002689 soil Substances 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images







Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/08—Servomotor systems without provision for follow-up action; Circuits therefor with only one servomotor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B21/00—Common features of fluid actuator systems; Fluid-pressure actuator systems or details thereof, not covered by any other group of this subclass
- F15B21/04—Special measures taken in connection with the properties of the fluid
Definitions
- the present invention relates to a hydraulic control device for a work machine that is suitably used for excavating work such as earth and sand.
- a hydraulic circuit of a work machine represented by a large hydraulic excavator has a main hydraulic pump with a large discharge flow rate as a main hydraulic pressure source, and includes a high-pressure actuator including an actuator such as a hydraulic cylinder and a directional control valve for controlling the actuator.
- the main circuit and a low-pressure pilot circuit that includes a pilot pump having a discharge flow rate smaller than that of the hydraulic pump and controls the direction control valve of the main circuit according to the amount of lever operation by the driver. .
- an electric signal corresponding to the amount of lever operation is input to the controller from an electric operation device represented by an electric lever.
- the controller outputs a control current corresponding to the electric signal to the electromagnetic proportional pressure reducing valve.
- the electromagnetic proportional pressure reducing valve controls the operation of the hydraulic actuator by supplying a pilot pressure proportional to the control current to the direction control valve on the main circuit and switching the direction control valve.
- a working machine operating in a cold region has a high viscosity of the hydraulic oil when the oil temperature falls below a predetermined temperature, so that the hydraulic oil and pilot pump absorb poorly. As a result, it becomes difficult to smoothly operate the work machine.
- a heater hydroaulic oil heater
- a warm-up operation is performed, and the work is started after the hydraulic equipment including the actuator is warmed.
- Patent Documents 1 and 2 are both techniques for recirculating oil in the pilot circuit and warming the circuit during the warm-up operation immediately after the engine cold start.
- the oil circulation in the pilot circuit may be stopped during operation of the work machine after the warm-up operation. For this reason, the oil temperature in the pilot circuit continues to fall under the influence of the ambient temperature even during operation of the machine. Therefore, when working in a cold region, the work must be periodically interrupted and the warm-up operation must be performed sequentially. As long as the warm-up operation is not performed, the oil viscosity becomes high and the fluidity is lowered.
- Patent Document 3 a technique is described in which a throttle is provided in the middle of a return line to a tank in a pilot circuit and the pilot circuit is warmed by energy of oil circulation. With this prior art, it is possible to warm up the pilot circuit during lever operation. However, it is not possible to warm up when the lever is not operated. For this reason, the same problem as in Patent Documents 1 and 2 occurs.
- Patent Document 4 it is possible to warm up the pilot circuit when the lever is operated and when the lever is not operated by providing a dedicated flow control valve and a conduit.
- a dedicated flow control valve and pipe it is necessary to install a dedicated flow control valve and pipe. For this reason, when the working machine becomes large, there is a problem that the circuit configuration becomes complicated and the manufacturing cost increases accordingly.
- the present invention has been made in view of the above-described problems of the prior art, and an object of the present invention is to enable efficient warm-up operation immediately after start-up with a simple circuit configuration and to interrupt the operation even during operation of the machine.
- An object of the present invention is to provide a hydraulic control device for a work machine including a heat system that can warm up a pilot circuit without causing the pilot circuit to warm up.
- the present invention provides a main hydraulic pump and a pilot pump that are driven by a prime mover of a work machine and suck in hydraulic oil from a tank and discharge the pressure oil.
- a hydraulic actuator driven by pressure oil supplied from a pump, and provided between the hydraulic pump and the hydraulic actuator, and a pilot pressure from the pilot pump is supplied to a hydraulic pilot unit to the hydraulic actuator.
- the pilot pressure control device includes a pilot pressure supply line connected to a discharge side of the pilot pump, a tank line connected to the tank, and the pilot pressure.
- a first pump port connected to a supply line, a first tank port connected to the tank line, and a first output port connected to a hydraulic pilot part of the control valve;
- a first solenoid valve that selectively connects one output port to the first pump port or the first tank port and performs switching control of the control valve;
- a second pump port connected to the pilot pressure supply line;
- a second tank port connected to the tank pipe and a second output port, and the second output port is connected to the second pump port or the second port according to the electric signal;
- a second solenoid valve that is selectively connected to the pilot port, wherein the second solenoid valve is connected to the second pump port for increasing the temperature of the hydraulic fluid flowing through the pilot pressure control device.
- the pressure oil flowing through the second output port is returned to the tank pipe.
- the second solenoid valve returns the pressure oil flowing from the second pump port to the second output port to the tank line.
- circulates the inside of a pilot pressure control apparatus can be raised.
- the heat system of the pilot pressure control device can be realized with a simple circuit configuration, and the warm-up operation immediately after the start-up of the prime mover can be efficiently performed. Further, even during operation of the work machine, the pilot circuit can be warmed up without interrupting a desired excavation work or the like by switching and controlling the first electromagnetic valve and the second electromagnetic valve.
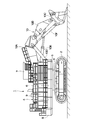
- FIG. 1 is an overall view showing a large hydraulic excavator as a work machine according to a first embodiment.
- FIG. 2 is a hydraulic circuit diagram for driving a hydraulic cylinder mounted on the hydraulic excavator in FIG. 1.
- FIG. 3 is a hydraulic circuit diagram for driving a hydraulic cylinder showing a state in which a heat circuit in FIG. 2 is operated. It is a flowchart which shows the control process of warm-up operation mode. It is a flowchart which shows the control processing in a work mode. It is a characteristic diagram which shows the characteristic of the heat circuit opening area, the operation circuit pressure, and the hydraulic oil temperature in the warm-up operation mode and the work mode. It is a general view which shows the large sized hydraulic excavator by 2nd Embodiment.
- FIG. 8 is a hydraulic circuit diagram for driving a hydraulic cylinder mounted on the hydraulic excavator in FIG. 7.
- FIG. 1 to FIG. 6 show the first embodiment.
- a large excavator 1 is used when excavation work is performed at various work sites (for example, a quarry in a mine).
- the hydraulic excavator 1 is a self-propelled crawler-type lower traveling body 2, and is mounted on the lower traveling body 2 through a turning device 3 so as to be capable of turning.
- the body 4 is configured to include a working device 10 described later provided on the front side of the upper revolving body 4 so as to be able to move up and down.
- the upper swing body 4 includes a swing frame 5, a building cover 6, a cab 7 and a counterweight 8.
- the working device 10 performs excavation work of, for example, earth and sand, with a boom 10A whose base end side is attached to the revolving frame 5 so as to be able to move up and down, and an arm 10B that is attached to the distal end side of the boom 10A so as to be able to move up and down.
- the arm 10B is configured to include a bucket 10C as a working tool that is rotatably provided on the distal end side of the arm 10B.
- the boom 10A of the work device 10 is lifted up and down with respect to the revolving frame 5 by the boom cylinder 10D, and the arm 10B is lifted up and down by the arm cylinder 10E on the tip side of the boom 10A. Further, the bucket 10C as the work tool is rotated up and down by the bucket cylinder 10F as the work tool cylinder on the distal end side of the arm 10B.
- a main hydraulic pump 11 driven by an engine 9 as a prime mover discharges hydraulic oil sucked from the tank 12 as high pressure oil.
- the main hydraulic pump 11 is composed of, for example, a variable displacement axial piston type or radial piston type hydraulic pump, and constitutes a main hydraulic source together with the tank 12.
- the hydraulic pump 11 may be a fixed displacement hydraulic pump.
- the working hydraulic cylinder 13 shows a typical example of a hydraulic actuator.
- the hydraulic cylinder 13 corresponds to, for example, a boom cylinder 10D, an arm cylinder 10E, or a bucket cylinder 10F provided in the work device 10.
- the hydraulic cylinder 13 includes a tube 13A, a piston 13B, and a rod 13C.
- the hydraulic cylinder 13 used in the large excavator 1 has a large cylinder diameter, and the amount of hydraulic oil (operating oil amount) supplied to and discharged from the hydraulic pump 11 to the hydraulic cylinder 13 is also large.
- the inside of the tube 13A is defined by the piston 13B into two oil chambers 13D and 13E, and the base end side of the rod 13C is fixed to the piston 13B.
- the distal end side of the rod 13C protrudes outside the tube 13A, and is expanded and contracted by the pressure oil supplied and discharged into the tube 13A.
- the hydraulic actuator is not limited to the hydraulic cylinder 13, and may be a hydraulic motor for turning or traveling the hydraulic excavator 1, for example.
- the direction control valve 14 as a control valve is a control valve for the hydraulic cylinder 13. This direction control valve 14 is provided between the hydraulic pump 11, the tank 12 and the hydraulic cylinder 13.
- the directional control valve 14 is composed of, for example, a hydraulic pilot type directional control valve at a 4-port 3 position, and hydraulic pilot portions 14A and 14B are provided on both the left and right sides. Hydraulic pilot portions 14A and 14B of the directional control valve 14 are connected to a pilot pressure control device 21 described later via pilot pipelines 15A and 15B.
- the directional control valve 14 is switched from the neutral position (I) to the switching position (II) or (III) when the pilot pressure is supplied from the pilot pressure control device 21 to the hydraulic pilot portions 14A and 14B.
- the hydraulic oil from the hydraulic pump 11 is supplied to and discharged from the oil chambers 13D and 13E of the hydraulic cylinder 13 via the pair of main pipelines 16A and 16B, and the rod 13C of the hydraulic cylinder 13 is connected to the tube 13A. It is expanded and contracted (driven).
- the flow rate of the pressure oil supplied to and discharged from the bottom side oil chamber 13D and the rod side oil chamber 13E of the hydraulic cylinder 13 is determined by the stroke amount of the direction control valve 14 (that is, the tilt of the operation lever 20A described later). It is variably controlled according to the operation amount.
- the pilot pump 17 constitutes a pilot hydraulic power source together with the tank 12.
- the pilot pump 17 is driven to rotate together with the main hydraulic pump 11 by the engine 9.
- a low pressure relief valve 18 is provided between the pilot pump 17 and the tank 12 on the discharge side. The low-pressure relief valve 18 suppresses the discharge pressure of the pilot pump 17 below a predetermined relief setting pressure.
- the main hydraulic pump 11 is provided with a high-pressure relief valve 19 between the discharge pipe 11A and the tank 12.
- the high-pressure relief valve 19 keeps the discharge pressure of the hydraulic pump 11 below a predetermined relief setting pressure in order to prevent an excessive pressure from being generated in the hydraulic pump 11.
- This relief set pressure is set to a pressure sufficiently higher than that of the low pressure relief valve 18.
- the operation lever device 20 is configured as an electric operation device that remotely operates the hydraulic cylinder 13.
- the operation lever device 20 includes an operation lever 20A that is manually tilted by an operator of the excavator 1.
- the operation lever device 20 outputs an electric signal corresponding to the operation direction (arrow A, B direction) of the operation lever 20A and the operation amount to the electromagnetic pilot pressure control device 21 via the controller 30 described later.
- the operating lever device 20 is provided in the cab 7 of the excavator 1.
- the electromagnetic pilot pressure control device 21 is disposed at a position (for example, a position close to the directional control valve 14) that is largely separated from the cab 7. That is, since the operation lever device 20 is an electric operation device, the operation lever device 20 may be connected to the pilot pressure control device 21 by electric wiring (signal line). Therefore, the distance between the two can be extended to several meters or more as needed. In the case of pilot hydraulic piping, for example, the length is limited to 1 to 2 meters.
- the electromagnetic pilot pressure control device 21 includes two first electromagnetic proportional pressure reducing valves as first electromagnetic valves that supply pilot pressures corresponding to (proportional to) an electrical signal from the operation lever device 20 to the pilot pipe lines 15A and 15B. 22, 23, a second electromagnetic proportional pressure reducing valve 25 as a second electromagnetic valve provided in a valve housing 24 common to the first electromagnetic proportional pressure reducing valves 22, 23, and a discharge side of the pilot pump 17.
- a pilot pressure supply line 26 that extends into the valve housing 24, a tank line 27 that extends from the valve housing 24 toward the tank 12, and has a distal end connected to the tank 12, and a fixed throttle 33 that will be described later. It is comprised including.
- the two first electromagnetic proportional pressure reducing valves 22 and 23 are arranged in the valve housing 24 so as to be in parallel with each other, and are switched in electromagnetic proportion from the initial position (a) to the switching position (b) according to the electrical signal.
- the two first electromagnetic proportional pressure reducing valves 22 and 23 are respectively connected to the first pump ports 22A and 23A connected to the pilot pressure supply line 26 in the valve housing 24 and to the tank line 27, respectively.
- the tank ports 22B and 23B and the first output ports 22C and 23C connected to the hydraulic pilot portions 14A and 14B of the direction control valve 14, respectively.
- One of the first electromagnetic proportional pressure reducing valves 22 and 23 is switched to the initial position (a) or the switching position (b) according to the electrical signal.
- the first output port 22C is selectively connected to the first pump port 22A or the first tank port 22B. That is, while the operation lever 20A is in the neutral position, the electromagnetic proportional pressure reducing valve 22 is in the initial position (a) because the electrical signal is demagnetized (energization is stopped).
- the first output port 22C is disconnected from the first pump port 22A and connected to the first tank port 22B. For this reason, the pilot pressure in the pilot line 15A is maintained at a low pressure state close to the tank pressure.
- the electromagnetic proportional pressure reducing valve 22 is in the initial position (a) in proportion to the current value at this time.
- the switching position (b) in proportion to the electromagnetic.
- the first output port 22C is connected to the first pump port 22A.
- the pilot pressure in the pilot line 15A is increased in response to the electric signal (ie, control current) from the operation lever device 20, and the directional control valve 14 is neutral in proportion to the pilot pressure at this time.
- the position (I) is switched to the switching position (II).
- the other electromagnetic proportional pressure reducing valve 23 of the first electromagnetic proportional pressure reducing valves 22 and 23 has a first output port 23C selectively connected to the first pump port 23A or the first tank port 23B in accordance with the electric signal.
- the electromagnetic proportional pressure reducing valve 23 is in the initial position (a) while the operation lever 20A is returned to the neutral position and the electric signal is demagnetized.
- the first output port 23C is connected to the first tank port 23B. For this reason, the pilot pressure in the pilot line 15B is maintained in a low pressure state close to the tank pressure.
- the electromagnetic proportional pressure reducing valve 23 is proportional to the current value at this time from the initial position (a).
- Switching to the switching position (b) is proportional to the electromagnetic.
- the first output port 23C is connected to the first pump port 23A.
- the pilot pressure in the pilot line 15B is increased in response to an electric signal (ie, control current) from the operation lever device 20, and the directional control valve 14 is neutral in proportion to the pilot pressure at this time.
- the position (I) is switched to the switching position (III).
- the directional control valve 14 is switched from the neutral position (I) to the switching position (II) or (III) by supplying the pilot pressure to the hydraulic pilot portions 14A and 14B as described above. For this reason, pressure oil from the hydraulic pump 11 is supplied to and discharged from the oil chambers 13D and 13E of the hydraulic cylinder 13 through the pair of main pipelines 16A and 16B, respectively, and the rod 13C of the hydraulic cylinder 13 is expanded and contracted (driven). Is done. As described above, the expansion and contraction of the hydraulic cylinder 13 is remotely operated by the operation lever device 20 via the electromagnetic pilot pressure control device 21 (first electromagnetic proportional pressure reducing valves 22 and 23) and the direction control valve 14.
- the second electromagnetic proportional pressure reducing valve 25 is provided in a common valve housing 24 so as to be in parallel with the two first electromagnetic proportional pressure reducing valves 22 and 23.
- the second electromagnetic proportional pressure reducing valve 25 constitutes a heat circuit of the pilot pressure control device 21.
- the second electromagnetic proportional pressure reducing valve 25 is electromagnetically switched from the reflux stop position (c) to the reflux position (d) by an electrical signal from the controller 30.
- the second electromagnetic proportional pressure reducing valve 25 includes a second pump port 25A connected to the pilot pressure supply line 26 in the valve housing 24 and a second tank port 25B connected to the tank line 27 in the valve housing 24. And a second output port 25C.
- the second electromagnetic proportional pressure reducing valve 25 is switched to the reflux stop position (c) or the reflux position (d) according to the electric signal from the controller 30.
- the second output port 25C is selectively connected to the second pump port 25A or the second tank port 25B. That is, while the electric signal from the controller 30 is returned to the reflux stop position (c), the second electromagnetic proportional pressure reducing valve 25 allows the working oil to flow (reflux) in the valve housing 24 of the pilot pressure control device 21. Stop doing.
- the second electromagnetic proportional pressure reducing valve 25 when the second electromagnetic proportional pressure reducing valve 25 is switched from the reflux stop position (c) to the reflux position (d) by the electrical signal from the controller 30, the second output port 25C is connected to the second pump port 25A. .
- the second electromagnetic proportional pressure reducing valve 25 causes the pilot pressure oil discharged from the pilot pump 17 to flow through the pilot pressure supply line 26 and the valve housing 24 of the pilot pressure control device 21.
- the pilot pressure oil at this time is recirculated from the second pump port 25A of the second electromagnetic proportional pressure reducing valve 25 to the tank line 27 via the second output port 25C.
- the temperature of the valve housing 24 of the pilot pressure control device 21 is increased by receiving thermal energy from the pilot pressure oil (hydraulic oil) circulating inside.
- the oil temperature of the hydraulic oil can be maintained at a high temperature in the valve housing 24.
- the second electromagnetic proportional pressure reducing valve 25 heats the pilot circuit (particularly, the first electromagnetic proportional pressure reducing valves 22, 23) that switches the direction control valve 14 including the pilot pressure control device 21. Constitutes the main part of the heat circuit. That is, the second electromagnetic proportional pressure reducing valve 25 circulates warm oil in the tank 12 (operating oil that is always heated by a heater 31 described later) in the valve housing 24 of the pilot pressure control device 21. Thus, the second electromagnetic proportional pressure reducing valve 25 can warm up the pilot circuit (that is, the hydraulic circuit in the valve housing 24 including the first electromagnetic proportional pressure reducing valves 22 and 23).
- the valve housing 24 has a common heat that allows heat due to an increase in the oil temperature of the hydraulic oil to be transmitted between the first electromagnetic proportional pressure reducing valves 22 and 23, the second electromagnetic proportional pressure reducing valve 25, and a fixed throttle 33 described later. It constitutes a conductor.
- the temperature sensor 28 is a temperature detector provided in the middle of the tank conduit 27, for example.
- the temperature sensor 28 detects the temperature of the return oil (hydraulic oil) returned from the valve housing 24 of the pilot pressure control device 21 to the tank 12 via the tank line 27.
- the pressure sensors 29A and 29B are detectors that individually detect the pilot pressure in the pilot pipes 15A and 15B.
- the pressure sensor 29A is provided in the middle of the pilot line 15A between the first output port 22C of the first electromagnetic proportional pressure reducing valve 22 and the hydraulic pilot portion 14A of the direction control valve 14.
- the pressure sensor 29B is provided in the middle of the pilot line 15B between the first output port 23C of the first electromagnetic proportional pressure reducing valve 23 and the hydraulic pilot portion 14B of the direction control valve 14. Detection signals from the temperature sensor 28 and the pressure sensors 29A and 29B are output to the controller 30.
- the controller 30 is composed of, for example, a microcomputer.
- the controller 30 includes first electromagnetic proportional pressure reducing valves 22 and 23 and second electromagnetic proportional pressure reducing valves in accordance with drive information of the engine 9, electric signals from the operating lever device 20, and detection signals from the temperature sensor 28 and the pressure sensors 29A and 29B.
- the control means which controls switching to 25 is comprised.
- On the input side of the controller 30, an operation lever device 20, a temperature sensor 28, pressure sensors 29 ⁇ / b> A and 29 ⁇ / b> B, a control device (not shown) for the engine 9, and the like are connected.
- the output side of the controller 30 is connected to the first electromagnetic proportional pressure reducing valves 22 and 23 and the second electromagnetic proportional pressure reducing valve 25.
- the controller 30 has a memory 30A composed of, for example, a nonvolatile memory, ROM, RAM, or the like.
- a program for performing control processing in the warm-up operation mode
- a program for performing control processing in the work mode see FIG. 5
- the temperature T of the hydraulic oil are within an appropriate temperature range.
- the first temperature Ta, the second temperature Tb (Ta> Tb) and the pilot pressure in the pilot lines 15A and 15B for switching the direction control valve 14 ie, Information including the pressure value for determining whether or not the operation circuit pressure has reached the required set pressure P1 is stored.
- the first temperature Ta is set to a temperature similar to a target temperature during warm-up operation, for example.
- the second temperature Tb is a temperature lower than the first temperature Ta by a predetermined temperature, and is set to a limit temperature at which a decrease in responsiveness due to an increase in the viscosity of the hydraulic oil does not occur. That is, the second temperature Tb is set to a temperature just before the response of the pilot pressure generated in the pilot pipes 15A and 15B is lowered with respect to, for example, the tilting operation of the operation lever 20A.
- the set pressure P1 is a pressure value for determining whether or not the operation lever 20A is tilted in either the arrow A or B direction, for example.
- the set pressure P1 is sufficiently lower than the maximum pressure value MAX of the pilot pressure (that is, the operation circuit pressure shown in FIG. 6) supplied from the first electromagnetic proportional pressure reducing valves 22 and 23 to the pilot lines 15A and 15B.
- the pressure value is set to a pressure value (for example, a pressure value that is 1/2 or less of the maximum pressure value MAX).
- the set pressure P1 is set to a minimum pressure within a range that does not affect the operation, for example, the switching operation of the direction control valve 14 (operation of the hydraulic excavator 1) cannot be performed due to insufficient pilot pressure. preferable.
- a heater 31 is provided in the tank 12.
- the heater 31 warms the hydraulic oil in the tank 12 to have an appropriate viscosity, and keeps the oil temperature within a required temperature range. This temperature range is determined based on, for example, a target temperature during warm-up operation.
- the relief valve 32 is provided in the middle of the main pipe line 16 ⁇ / b> A between the oil chamber 13 ⁇ / b> D of the hydraulic cylinder 13 and the tank 12 in order to prevent excessive pressure from being generated in the oil chamber 13 ⁇ / b> D on the bottom side of the hydraulic cylinder 13. ing.
- a fixed throttle 33 is provided in the middle of the tank pipe line 27. If proportional control of the first electromagnetic proportional pressure reducing valves 22 and 23 and the second electromagnetic proportional pressure reducing valve 25 is performed without the fixed throttle 33, the pressure may not be stable due to the pressure regulating function of these pressure reducing valves. is there. Thereby, for example, hunting may occur in the second electromagnetic proportional pressure reducing valve 25.
- the fixed throttle 33 is preferably provided in the valve housing 24 in the middle of the tank conduit 27.
- the second electromagnetic proportional pressure reducing valve 25 is preferably subjected to ON-OFF control instead of electromagnetic proportional control. That is, a highly versatile electromagnetic valve can be used in place of the second electromagnetic proportional pressure reducing valve 25.
- the large excavator 1 according to the first embodiment has the above-described configuration, and the operation thereof will be described next.
- the operator of the hydraulic excavator 1 gets on the cab 7 of the upper swing body 4, starts the engine 9, and drives the hydraulic pump 11 and the pilot pump 17.
- the pressure oil is discharged from the hydraulic pump 11 toward the discharge pipe 11A, and this pressure oil is supplied to the hydraulic cylinder 13 (for example, the boom cylinder 10D shown in FIG. 1) via the direction control valve 14.
- other directional control valves are supplied to other hydraulic actuators (for example, arm cylinder 10E, bucket cylinder 10F, turning hydraulic motor, traveling hydraulic motor, etc. shown in FIG. 1). .
- the pilot pressure control device 21 causes the first electromagnetic proportional pressure reducing valve 22 or 23 to be switched from the initial position (a) to the switching position (b), and the operation lever A pilot pressure corresponding to (proportional to) the electrical signal from the apparatus 20 is supplied to the pilot line 15A or 15B. Therefore, the directional control valve 14 is switched from the neutral position (I) to any one of the switching positions (II) and (III), and the pressure oil from the hydraulic pump 11 is supplied to the hydraulic cylinder via the directional control valve 14. 13 is supplied.
- the hydraulic cylinder 13 can perform soil excavation work and the like by moving the working device 10 up and down by extending or reducing the rod 13C from the tube 13A.
- the tank 12 storing the hydraulic oil is provided with a heater 31 to keep the temperature of the hydraulic oil so that it does not drop below a predetermined temperature while the machine is at rest.
- the engine 9 is started at a low temperature, a warm-up operation is performed, and work is started after the hydraulic equipment (for example, a hydraulic actuator) is warmed.
- the oil circulation in the pilot circuit (that is, the pilot pressure control device 21) may be stopped.
- the ambient temperature is affected even during the operation of the machine.
- the oil temperature drops.
- the valve housing 24 or the like of the pilot pressure control device 21 is heated, the viscosity of the hydraulic oil increases and the responsiveness during operation decreases.
- the super-large hydraulic excavator 1 having a body weight of 100 t or more has a long pipe length from the discharge side of the pilot pump 17 to the first electromagnetic proportional pressure reducing valves 22 and 23 installed at the end of the pilot circuit.
- the first electromagnetic proportional pressure reducing valves 22 and 23 are far away from the heat source of the vehicle body (for example, the position of the engine 9), and thus are easily affected by the ambient atmosphere temperature.
- the flow rate circulating through the pilot pressure control device 21 (pilot circuit) is small, the oil temperature in the pipe line is easily affected by the ambient temperature. Thereby, the viscosity of the hydraulic fluid which flows through the said pilot circuit becomes high in a cold district environment.
- the reaction speed until the first electromagnetic proportional pressure reducing valves 22 and 23 start to move from the input of the electric signal is slow, and the operation responsiveness on the pilot circuit side tends to be lowered.
- the second electromagnetic proportional pressure reducing valve 25 is provided in parallel with the two first electromagnetic proportional pressure reducing valves 22 and 23 in the valve housing 24 of the pilot pressure control device 21. .
- the pilot pressure oil discharged from the pilot pump 17 is supplied to the pilot pressure supply line 26, pilot pressure control.
- the pilot pressure oil flowing in the valve housing 24 is returned from the tank line 27 to the tank 12.
- the second electromagnetic proportional pressure reducing valve 25 can circulate the warm oil in the tank 12 (the working oil that is always heated by the heater 31) in the valve housing 24 of the pilot pressure control device 21.
- the pilot circuit that is, the first electromagnetic proportional pressure reducing valves 22 and 23
- the pilot pressure oil supplied to the pilot lines 15A and 15B can be maintained at a proper temperature and oil viscosity.
- FIG. 4 shows a control process in the warm-up operation mode of the second electromagnetic proportional pressure reducing valve 25 by the controller 30.
- step 1 when the control process in the warm-up operation mode is started, it is determined in step 1 whether or not the engine 9 has been started. While it is determined as “NO” in step 1, the engine 9 is not started, so the control process is terminated.
- the temperature T of the hydraulic oil in the tank pipe line 27 detected by the temperature sensor 28 in the next step 2 is the first temperature Ta (for example, the set temperature for the warm-up operation). ) Is determined.
- step 2 Since the temperature T of the hydraulic oil has not reached the first temperature Ta, the valve housing of the pilot pressure control device 21 is set to the maximum heat circuit opening in the next step 3. 24, the second electromagnetic proportional pressure reducing valve 25 is switched from the reflux stop position (c) to the reflux position (d). As a result, as shown in FIG. 3, the second electromagnetic proportional pressure reducing valve 25 sets the flow rate of the hydraulic oil that is recirculated from the second pump port 25A to the tank line 27 via the second output port 25C to the maximum flow rate. .
- the second electromagnetic proportional pressure reducing valve 25 can circulate the warm oil in the tank 12 in the valve housing 24 of the pilot pressure control device 21, and warms up the first electromagnetic proportional pressure reducing valves 22 and 23. Therefore, the valve operation responsiveness can be prevented from being lowered. In the next step 4, the process returns, and the processes after step 1 are repeated.
- Step 2 when “NO” is determined in Step 2, the temperature T of the hydraulic oil has reached the first temperature Ta. Therefore, in the next Step 5, the second electromagnetic proportional pressure reducing valve 25 is set so as to close the heat circuit. Return to the reflux stop position (c). As a result, the hydraulic oil is stopped from flowing (refluxing) in the valve housing 24 of the pilot pressure control device 21, and the temperature T of the hydraulic oil is prevented from becoming excessively higher than the first temperature Ta. The process returns at step 4, and the processes after step 1 are repeated.
- the second electromagnetic proportional pressure reducing valve 25 is driven by an electric signal from the controller 30 as the engine 9 starts.
- the switching is controlled, and the heat circuit opening area is set to the maximum (MAX) as described above (see the characteristic line 34).
- MAX maximum
- the temperature T of the hydraulic oil detected by the temperature sensor 28 gradually increases between time 0 and time t1 as shown by the characteristic line 36, and rises to the first temperature Ta (set temperature for warm-up operation).
- the second electromagnetic proportional pressure reducing valve 25 is switched to the reflux position (d), and the two electromagnetic proportional pressure reducing valves 22, 23 are switched from the initial position (a) to the switching position (b). It is good also as a structure.
- the pilot pressure oil discharged from the pilot pump 17 is returned to the tank 12 through the pilot pressure supply line 26, the second electromagnetic proportional pressure reducing valve 25, and the tank line 27.
- the pilot pressures in the pilot lines 15A and 15B are both low, and the direction control valve 14 Is not inadvertently switched from the neutral position (I).
- step 11 when the work mode control process is started, it is determined in step 11 whether or not the engine 9 is in operation. While it is determined as “NO” in step 11, the engine 9 is not operating, so the control process is terminated.
- the process proceeds to the next step 12, and whether or not the temperature T of the hydraulic oil in the tank pipe line 27 detected by the temperature sensor 28 is lower than the second temperature Tb (that is, Then, it is determined whether or not the temperature of the pilot pressure generated in the pilot pipes 15A and 15B has dropped to a temperature at which the response of the pilot lever 15A is lowered.
- the hydraulic oil temperature T is equal to or higher than the second temperature Tb during the time t1 to t2 in the work mode. Is done. In this case, the process returns at the next step 13, and the processing after step 11 is continued.
- Step 12 when it is determined as “YES” in Step 12, the temperature T of the hydraulic oil is lower than the second temperature Tb. Therefore, in step 14, in order to increase the opening amount of the heat circuit, the second electromagnetic proportional pressure reducing valve 25 is switched from the reflux stop position (c) to the reflux position (d), and the opening amount at the reflux position (d) is gradually increased.
- the temperature T of the hydraulic oil is raised to the second temperature Tb or higher.
- next step 15 it is determined whether or not the operation lever 20 ⁇ / b> A has been tilted. If it is determined “NO” in step 15, the operation lever 20 ⁇ / b> A has not been tilted. Move. If “YES” is determined in the step 15, the process proceeds to the next step 16.
- the operating circuit pressure P detected by the pressure sensors 29A and 29B that is, the pilot pressure in the working mode supplied from the first electromagnetic proportional pressure reducing valves 22 and 23 to the pilot lines 15A and 15B
- the set pressure P1 It is determined whether it is lower than the characteristic line 35 in FIG. If “NO” is determined in the step 16, the process returns to the step 14 to increase the opening amount of the heat circuit as described above.
- the process proceeds to the next step 17 to perform control to reduce the heat circuit opening amount.
- the control for increasing and decreasing the opening amount of the heat circuit by the second electromagnetic proportional pressure reducing valve 25 will be specifically described.
- the second electromagnetic proportional pressure reducing valve 25 is switched from the recirculation stop position (c) to the recirculation position (d) to greatly increase the opening amount at the recirculation position (d).
- the pilot pressure oil discharged from the pilot pump 17 circulates into the pilot pressure supply line 26 and the valve housing 24 of the pilot pressure control device 21, and most of the pressure oil is transferred from the tank line 27 to the tank 12. Refluxed.
- the pilot supplied from the first electromagnetic proportional pressure reducing valve 22 to the hydraulic pilot portion 14A of the direction control valve 14 is provided.
- the pressure (or the pilot pressure supplied from the first electromagnetic proportional pressure reducing valve 23 to the hydraulic pilot portion 14B of the direction control valve 14) does not increase.
- the pilot pressure oil in the pilot lines 15A and 15B tends to be insufficient, and in some cases, the switching operation of the directional control valve 14 becomes difficult, and the expansion / contraction operation of the hydraulic cylinder 13 becomes impossible.
- the pilot pressure oil (that is, the operation circuit pressure P) supplied from the first electromagnetic proportional pressure reducing valve 22 or 23 to the hydraulic pilot portion 14A or 14B of the direction control valve 14 can be increased, and a required pilot pressure is secured. it can.
- next step 18 it is determined whether or not the temperature T of the hydraulic oil is lower than the first temperature Ta, and when “YES” is determined in step 18, the process returns to step 16 and the subsequent processing is continued. To do. However, when it is determined “NO” in step 18, the process proceeds to the next step 19 in order to avoid that the temperature T of the hydraulic oil becomes equal to or higher than the first temperature Ta and becomes excessively high (overheat). Control to close the heat circuit. That is, by returning the second electromagnetic proportional pressure reducing valve 25 from the recirculation position (d) to the recirculation stop position (c), the heat circuit is closed and the recirculation of the pilot pressure oil is stopped. .
- the control process of the work mode by the controller 30 is executed as in steps 12 to 19 in FIG. Therefore, as shown by the characteristic line 34 in FIG. 6, the opening area of the heat circuit is variably controlled between the times t1 and t7.
- the temperature T of the hydraulic oil in the tank line 27 detected by the temperature sensor 28 is, as indicated by the characteristic line 36, a temperature range between the first temperature Ta and the second temperature Tb (that is, The temperature is controlled so as to be within the range of the warm-up temperature.
- the operation circuit pressure P detected by the pressure sensors 29A and 29B is controlled in a stepwise manner as indicated by a characteristic line 35 in FIG. 6, for example, a required operation pressure equal to or higher than the set pressure P1 (ie, the first electromagnetic proportional pressure reducing valve).
- the pilot pressure supplied from 22 or 23 to the hydraulic pilot part 14A or 14B of the direction control valve 14 can be secured.
- the pilot pressure oil supplied from the first electromagnetic proportional pressure reducing valve 22 or 23 to the hydraulic pilot portion 14A or 14B of the direction control valve 14 tends to be insufficient while the temperature of the hydraulic oil is kept warm in the work mode.
- the expansion / contraction operation of the hydraulic cylinder 13 (the operation required during work) can be continued.
- the heat circuit by the second electromagnetic proportional pressure reducing valve 25 is opened to the maximum.
- the flow rate of the pilot pressure oil flowing through the valve housing 24 of the pilot pressure control device 21 is increased.
- the warm oil in the tank 12 can be circulated in the valve housing 24.
- the pilot circuit that is, the first electromagnetic proportional pressure reducing valves 22 and 23
- the pilot pressure oil supplied to the pilot lines 15A and 15B can be maintained at an appropriate temperature and viscosity state.
- the temperature of the pilot pressure oil is constantly monitored by the temperature sensor 28 provided on the tank line 27 side, and the opening area of the heat circuit by the second electromagnetic proportional pressure reducing valve 25 is determined. It can be adjusted according to the situation. Thereby, the minimum pilot pressure (operation circuit pressure) necessary for the operation of the direction control valve 14 can be ensured by the switching control of the first electromagnetic proportional pressure reducing valves 22 and 23. Moreover, the pilot pressure control device 21 can be warmed up, and the oil temperature can be maintained at the required temperature.
- switching between the warm-up operation mode and the work mode may be performed freely by an operator in the cab 7 (operating room), for example, with a switch (not shown). Further, in the warm-up operation mode, when the oil temperature detected by the temperature sensor 28 of the pilot pressure control device 21 reaches a set temperature such as the first temperature Ta, for example, the operator is notified on the monitor or the like. If it does, it can shift to work mode smoothly and can start field work.
- a set temperature such as the first temperature Ta
- the second electromagnetic proportional pressure reducing valve 25 causes the pilot pressure oil flowing from the second pump port 25A to the second output port 25C to flow back to the tank line 27.
- circulates the inside of the valve housing 24 of the pilot pressure control apparatus 21 can be raised.
- the heat system of the pilot pressure control device 21 (pilot circuit) can be realized with a simple circuit configuration, and the warm-up operation immediately after the engine 9 is started at a low temperature can be efficiently performed.
- the first electromagnetic proportional pressure reducing valves 22 and 23 and the second electromagnetic proportional pressure reducing valve 25 are controlled to be switched. Thereby, the pilot circuit can be warmed up without interrupting the work.
- the fixed throttle 33 is provided in the middle of the tank conduit 27 on the downstream side of the second electromagnetic proportional pressure reducing valve 25.
- the flow (kinetic) energy of the hydraulic oil (return oil) recirculated from the second pump port 25A of the second electromagnetic proportional pressure reducing valve 25 to the tank pipe line 27 via the second output port 25C has thermal energy. Is converted by the fixed aperture 33. For this reason, the oil temperature of the hydraulic fluid which distribute
- the fixed throttle 33 can set a fixed throttle diameter so as to guarantee a minimum pressure that does not affect the operation of the machine and to secure a flow rate.
- the fixed aperture 33 can serve as a safety device.
- the fixed throttle 33 is provided in the valve housing 24 of the pilot pressure control device 21 in the first embodiment.
- the present invention is not limited to this.
- the fixed throttle 33 may be provided outside the valve housing 24 of the pilot pressure control device 21 and provided in the middle of the tank conduit 27.
- FIG. 7 and FIG. 8 show a second embodiment.
- the same components as those in the first embodiment described above are denoted by the same reference numerals, and the description thereof is omitted.
- the feature of the second embodiment is that the pilot pressure control device for switching the control valve is located away from the heat source of the upper swing body 4 (vehicle body) (for example, the boom 10A of the work device 10). The configuration is such that it is exposed to the outside.
- a regeneration pipeline 51 is provided between the main pipelines 16A and 16B of the hydraulic cylinder 13 so as to short-circuit the bottom-side oil chamber 13D and the rod-side oil chamber 13E. Yes.
- a flow rate regeneration valve 52 and a check valve 53 as control valves are provided in the middle of the regeneration conduit 51.
- the flow rate regeneration valve 52 is constituted by, for example, a 2-port 2-position hydraulic pilot type switching valve, and is always placed at the cutoff position (e) by a spring 52B.
- the flow rate regeneration valve 52 When the pilot pressure is supplied to the hydraulic pilot section 52A via the pilot pipe line 54, the flow rate regeneration valve 52 is switched from the cutoff position (e) to the flow rate regeneration position (f) against the spring 52B. At this time, the flow rate regeneration valve 52 passes a part of the pressure oil (return oil) discharged from the oil chamber 13D on the bottom side of the hydraulic cylinder 13 toward the main pipeline 16A through the regeneration pipeline 51 and the check valve 53. Merge and distribute to the main pipeline 16B side. The pressure oil at this time becomes recycled oil and is supplied to the oil chamber 13E on the rod side.
- the flow rate regeneration valve 52 constitutes a control valve that controls the supply of pressure oil to the hydraulic cylinder 13.
- the electromagnetic pilot pressure control device 55 includes a first electromagnetic proportional pressure reducing valve 56 as a first electromagnetic valve that supplies pilot pressure to the hydraulic pilot portion 52A of the flow rate regeneration valve 52 via the pilot pipe line 54, and the first electromagnetic proportional pressure reducing valve 56.
- a second electromagnetic proportional pressure reducing valve 58 as a second electromagnetic valve provided in a valve housing 57 common to the electromagnetic proportional pressure reducing valve 56 and a discharge side of the pilot pump 17 are provided and extended into the valve housing 57.
- the pilot pressure supply line 59 and the tank line 60 extending from the valve housing 57 toward the tank 12 and having a distal end connected to the tank 12 are configured.
- the pilot pressure supply line 59 of the pilot pressure control device 55 is branched off from the pilot pressure supply line 26 of the pilot pressure control device 21, and each pilot pressure supply line 26, 59 is on the discharge side of the pilot pump 17. Each is connected.
- the tank pipeline 60 of the pilot pressure control device 55 is also provided so as to branch off from the tank pipeline 27 of the pilot pressure control device 21, and each tank pipeline 27, 60 is connected to the tank 12.
- the first electromagnetic proportional pressure reducing valve 56 is disposed in the valve housing 57 so as to be in parallel with the second electromagnetic proportional pressure reducing valve 58, and switches from the initial position (g) to the switching position (h) in accordance with an electric signal from the controller 64 described later. Is switched in proportion to the electromagnetic field.
- the first electromagnetic proportional pressure reducing valve 56 includes a first pump port 56 ⁇ / b> A connected to the pilot pressure supply line 59 in the valve housing 57, a first tank port 56 ⁇ / b> B connected to the tank line 60, and a flow rate regeneration valve 52. And a first output port 56C connected to the hydraulic pilot portion 52A.
- the first electromagnetic proportional pressure reducing valve 56 is switched to the initial position (g) or the switching position (h) according to the electric signal, so that the first output port 56C is selectively used as the first pump port 56A or the first tank port 56B. Connected to. That is, while the electrical signal from the controller 64 is demagnetized (energization is stopped), the first electromagnetic proportional pressure reducing valve 56 is in the initial position (g). At this time, the first output port 56C is connected to the first pump port 56A. On the other hand, it is blocked and connected to the first tank port 56B. For this reason, the pilot pressure in the pilot line 54 is maintained at a low pressure state close to the tank pressure.
- the first electromagnetic proportional pressure reducing valve 56 is electromagnetically proportional from the initial position (g) to the switching position (h) in proportion to the current value at this time.
- the first output port 56C is connected to the first pump port 56A.
- the pilot pressure in the pilot line 54 is increased in response to the electric signal (that is, the control current), and the flow rate regenerating valve 52 flows from the shut-off position (e) in proportion to the pilot pressure at this time.
- the playback position (f) is switched.
- the flow rate regeneration valve 52 is switched from the shut-off position (e) to the flow rate regeneration position (f) by supplying the pilot pressure to the hydraulic pilot part 52A in this way. For this reason, when the rod 13C of the hydraulic cylinder 13 is contracted into the tube 13A, a part of the pressure oil (return oil) discharged from the bottom side oil chamber 13D of the hydraulic cylinder 13 to the main pipeline 16A is regenerated. It is possible to circulate through the check valve 53 to the main pipe line 16B side and supply it to the oil chamber 13E on the rod side as recycled oil. Thereby, the flow loss is reduced and the fuel efficiency is improved.
- the second electromagnetic proportional pressure reducing valve 58 is provided in a common valve housing 57 so as to be in parallel with the first electromagnetic proportional pressure reducing valve 56.
- the second electromagnetic proportional pressure reducing valve 58 constitutes a main part of the heat circuit of the pilot pressure control device 55, and is switched in electromagnetic proportion from the reflux stop position (j) to the reflux position (k) by an electric signal from the controller 64.
- the second electromagnetic proportional pressure reducing valve 58 includes a second pump port 58A connected to the pilot pressure supply line 59 in the valve housing 57 and a second tank port 58B connected to the tank line 60 in the valve housing 57. And a second output port 58C.
- the second electromagnetic proportional pressure reducing valve 58 is switched to the recirculation stop position (j) or the recirculation position (k) according to the electric signal from the controller 64, so that the second output port 58C becomes the second pump port 58A or the second tank port. 58B is selectively connected. That is, while the second electromagnetic proportional pressure reducing valve 58 is returned to the recirculation stop position (j) by the electrical signal from the controller 64, the working oil flows (recirculates) in the valve housing 57 of the pilot pressure control device 55. Stop doing.
- the second electromagnetic proportional pressure reducing valve 58 is switched from the reflux stop position (j) to the reflux position (k) by the electrical signal from the controller 64, the second output port 58C is connected to the second pump port 58A. .
- the second electromagnetic proportional pressure reducing valve 58 allows the pilot pressure oil discharged from the pilot pump 17 to flow through the pilot pressure supply line 59 and the valve housing 57 of the pilot pressure control device 55, while the second electromagnetic proportional pressure reducing valve 58.
- the second pump port 58A is returned to the tank line 60 via the second output port 58C.
- the valve housing 57 of the pilot pressure control device 55 rises in temperature by receiving thermal energy from the pilot pressure oil (hydraulic oil) flowing inside, and the oil temperature of the hydraulic oil is maintained at a high temperature in the valve housing 57. can do.
- the second electromagnetic proportional pressure reducing valve 58 heats the pilot circuit (particularly, the first electromagnetic proportional pressure reducing valve 56) including the pilot pressure control device 55 that switches the flow rate regeneration valve 52.
- the circuit is configured. That is, the second electromagnetic proportional pressure reducing valve 58 circulates the warm oil in the tank 12 into the valve housing 57 of the pilot pressure control device 55, thereby warming the pilot circuit (that is, the first electromagnetic proportional pressure reducing valve 56). Can be.
- the valve housing 57 constitutes a common heat conductor that allows heat due to an increase in the oil temperature of the hydraulic oil to be transferred between the first electromagnetic proportional pressure reducing valve 56 and the second electromagnetic proportional pressure reducing valve 58.
- the pilot pressure control device 55 is fixed between the second output port 58 ⁇ / b> C of the second electromagnetic proportional pressure reducing valve 58 and the tank pipeline 60 to limit the flow rate of the return oil returned to the tank pipeline 60.
- a diaphragm 61 is provided.
- the fixed aperture 61 is configured in the same manner as the fixed aperture 33 described in the first embodiment.
- the fixed throttle 61 is different from the first embodiment in that it is disposed outside the valve housing 57.
- the fixed throttle 61 may be arranged inside the valve housing 57, and such a design change can be made as necessary.
- the first electromagnetic proportional pressure reducing valve 58 and the second electromagnetic proportional pressure reducing valve 58 arranged in parallel in the valve housing 57 are common.
- the boom 10 ⁇ / b> A of the work apparatus 10 is provided.
- the pipe line length of the pilot pipe line 54 connecting the hydraulic pilot part 52A of the flow rate regeneration valve 52 and the first electromagnetic proportional pressure reducing valve 56 can be shortened.
- the first electromagnetic proportional pressure reducing valve 56, the second electromagnetic proportional pressure reducing valve 58 and the valve housing 57 of the pilot pressure control device 55 are located, for example, on the tip side of the boom 10A and exposed to the outside. It is provided in the state.
- the temperature sensor 62 is, for example, a temperature detector provided in the middle of the tank pipeline 60, and returns oil (hydraulic fluid) returned from the valve housing 57 of the pilot pressure control device 55 to the tank 12 via the tank pipeline 60. ) Temperature.
- the pressure sensor 63 is a detector that detects the pilot pressure in the pilot pipe line 54.
- the pressure sensor 63 is provided in the middle of the pilot conduit 54 between the first output port 56C of the first electromagnetic proportional pressure reducing valve 56 and the hydraulic pilot portion 52A of the flow rate regeneration valve 52. Detection signals from the temperature sensor 62 and the pressure sensor 63 are output to the controller 64.
- the controller 64 is configured in substantially the same manner as the controller 30 described in the first embodiment. However, in addition to the control of the pilot pressure control device 21, the controller 64 switches and controls the other pilot pressure control device 55 according to the electrical signal from the operation lever device 20 and the detection signals from the temperature sensor 62 and the pressure sensor 63. This is different from the first embodiment. Therefore, the controller 64 is connected to the control lever device 20, temperature sensors 28 and 62, pressure sensors 29 ⁇ / b> A, 29 ⁇ / b> B, and 63 and a control device (not shown) for the engine 9 on the input side.
- the output side of the controller 64 is connected to the pilot pressure control device 55 in addition to the first electromagnetic proportional pressure reduction valves 22 and 23 and the second electromagnetic proportional pressure reduction valve 25 of the pilot pressure control device 21 described in the first embodiment.
- the first electromagnetic proportional pressure reducing valve 56 and the second electromagnetic proportional pressure reducing valve 58 are connected.
- the controller 64 has a memory 64A composed of, for example, a nonvolatile memory, ROM, RAM, or the like.
- the memory 64A for example, in addition to the warm-up operation mode control process (see FIG. 4) and the work mode control process (see FIG. 5) described in the first embodiment, the flow rate A program (not shown) for switching and controlling the regeneration valve 52 and a program (not shown) for warming up the pilot pressure control device 55 are stored.
- a heat system of the pilot pressure control device 21 (pilot circuit) can be realized with a simple circuit configuration as in the first embodiment described above, A heat system of the pilot pressure control device 55 can be realized.
- the pilot line 54 can be warmed up without interrupting the operation by switching the first electromagnetic proportional pressure reducing valve 56 and the second electromagnetic proportional pressure reducing valve 58.
- the first electromagnetic proportional pressure reducing valve 56, the second electromagnetic proportional pressure reducing valve 58 and the valve housing 57 of the pilot pressure control device 55 are located on the tip side of the boom 10A and attached from the outside. Is provided. Thereby, there is an advantage that the pipeline length of the pilot pipeline 54 connecting the hydraulic pilot portion 52A of the flow rate regeneration valve 52 and the first electromagnetic proportional pressure reducing valve 56 can be shortened.
- the valve housing 57 of the pilot pressure control device 55 is at a position away from the heat source of the upper swing body 4 (vehicle body), and is exposed to the outside of the boom 10A. For this reason, the oil temperature in the valve housing 57, the pilot pressure supply pipe 59, and the tank pipe 60 is affected by the ambient temperature particularly in a cold region and tends to be low.
- the heat circuit by the second electromagnetic proportional pressure reducing valve 58 is the maximum. Opening increases the flow rate.
- the warm oil in the tank 12 can be circulated in the valve housing 57 of the pilot pressure control device 55.
- the pilot circuit that is, the first electromagnetic proportional pressure reducing valve 56 and the valve housing 57
- the second electromagnetic proportional pressure reducing valve 58 is warmed up by the second electromagnetic proportional pressure reducing valve 58, so that the operation responsiveness of the valve is not lowered.
- valve housing 57 and the like of the pilot pressure control device 55 are provided at a position where they are blown away at a position away from the heat source of the upper swing body 4 (vehicle body), the warm oil in the tank 12 flows into the valve housing 57. And circulate. This makes it possible to efficiently perform the necessary warm-up even at locations that are easily affected by the ambient temperature in cold regions.
- the pilot pressure control device 21 and another pilot pressure control device 55 are provided on the discharge side of the pilot pump 17 via the pilot pressure supply lines 26 and 59 as an example.
- the present invention is not limited to this.
- the pilot pressure control device 21 may be omitted, and only another pilot pressure control device 55 may be provided.
- the pilot pressure control device 21 is provided with the first electromagnetic proportional pressure reducing valves 22 and 23 and the second electromagnetic proportional pressure reducing valve 25 as an example.
- the present invention is not limited to this.
- an electromagnetic valve capable of more inexpensive ON-OFF control may be used instead of the second electromagnetic proportional pressure reducing valve 25.
- the second electromagnetic proportional pressure reducing valve 58 may be configured by an electromagnetic valve capable of inexpensive ON-OFF control.
- the large sized hydraulic excavator 1 was mentioned as an example and demonstrated as a working machine.
- the present invention is not limited to this, and may be applied to, for example, a medium-sized hydraulic excavator.
- work machines such as hydraulic cranes, wheel loaders, and dump trucks.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Mechanical Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Fluid-Pressure Circuits (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Operation Control Of Excavators (AREA)
Abstract
方向制御弁(14)の油圧パイロット部に供給するパイロット圧を可変に制御するパイロット圧制御装置(21)を備えている。パイロット圧制御装置(21)は、コントローラ(30)からの電気信号に従って第1出力ポート(22C,23C)を第1ポンプポート(22A,23A)または第1タンクポート(22B,23B)に選択的に接続し方向制御弁(14)の切換制御を行う第1電磁弁(22,23)と、前記電気信号に従って第2出力ポート(25C)を第2ポンプポート(25A)または第2タンクポート(25B)に選択的に接続する第2電磁弁(25)と、パイロット圧供給管路(26)およびタンク管路(27)とを含んでいる。前記第2電磁弁(25)は、第2ポンプポート(25A)から第2出力ポート(25C)に流れる圧油をタンク管路(27,60)に還流させ、パイロット圧制御装置(21)を暖機する。
Description
本発明は、例えば土砂等の掘削作業を行うのに好適に用いられる作業機械用油圧制御装置に関する。
一般に、大型の油圧ショベルに代表される作業機械の油圧回路は、吐出流量の大きいメインの油圧ポンプを主油圧源とし、油圧シリンダ等のアクチュエータおよび該アクチュエータを制御する方向制御弁等を備えた高圧なメイン回路と、前記油圧ポンプよりも吐出流量の小さいパイロットポンプを含み、運転者のレバー操作量に応じてメイン回路の前記方向制御弁を切換え制御する低圧なパイロット回路と、により構成されている。
前記パイロット回路においては、電気レバーに代表される電気式操作装置からレバー操作量に応じた電気信号がコントローラに入力される。コントローラは電気信号に応じた制御電流を電磁比例減圧弁に出力する。この電磁比例減圧弁は、制御電流に比例したパイロット圧をメイン回路上の前記方向制御弁に供給して当該方向制御弁の切換えを行うことにより油圧アクチュエータの作動を制御する。
従来、寒冷地で稼働する作業機械は、油温が所定温度以下になると、作動油の粘度が高くなるので、油圧ポンプおよびパイロットポンプによる作動油の吸込み性が悪くなる。この結果、作業機械としての作動を円滑に行うことが難しくなる。この対策として、従来は作動油タンク内や主要油圧機器周りの配管途中にヒータ(作動油の加熱器)を設けている。これにより、作動油タンク内や主要油圧機器周りの配管を保温し、機械の休車中に作動油の温度が所定温度以下まで下がらないようにしている。また、作業機械の低温始動時においては暖機運転を実施し、アクチュエータを含めた油圧機器を暖めてから作業を開始する。このような暖機運転を効率的に行うようにした種々の提案がなされている(特許文献1~4)。
ところで、特許文献1,2による従来技術は、いずれもエンジン低温始動直後の暖機運転時にパイロット回路内の油を還流させ、回路を暖める技術である。しかし、暖機運転後の作業機械の操作中には、パイロット回路内の油循環が停止されることがある。このため、パイロット回路内の油温は、機械の操作中でも周囲の雰囲気温度に影響されて下がり続ける。よって、寒冷地での作業時には定期的に作業を中断して暖機運転を逐次実施しなければならない。暖機運転を実施しない限りは、油粘度が高くなって流動性が低下するため、機械操作時の応答性が大きく低下するという問題がある。
特許文献3による従来技術には、パイロット回路のうちタンクへの戻り管路の途中に絞りを設け、油循環のエネルギでパイロット回路を暖める技術が記載されている。この従来技術では、レバー操作中にパイロット回路を暖機することが可能である。しかし、レバー操作を行っていない時は暖機することができない。このため、特許文献1,2と同様な問題が生じる。
一方、特許文献4による従来技術では、専用の流量制御弁と管路を設けることにより、レバー操作時と無操作時とにパイロット回路を暖機することが可能となっている。しかし、この場合は、専用の流量制御弁と管路の設置が必要になる。このため、作業機械が大型になると、これに伴って回路構成が複雑となり、製造コストが嵩むという問題がある。
本発明は上述した従来技術の問題に鑑みなされたもので、本発明の目的は、簡易な回路構成で始動直後の暖機運転を効率的に行うことができると共に、機械の操作中でも作業を中断させることなく、パイロット回路を暖機することが可能なヒートシステムを備えた作業機械用油圧制御装置を提供することにある。
上述した課題を解決するために、本発明は、作業機械の原動機によって駆動されタンクから作動油を吸込んで圧油を吐出するメインの油圧ポンプおよびパイロットポンプと、前記作業機械に設けられ、前記油圧ポンプから供給される圧油によって駆動される油圧アクチュエータと、前記油圧ポンプと前記油圧アクチュエータとの間に設けられ、前記パイロットポンプからのパイロット圧が油圧パイロット部に供給されることにより前記油圧アクチュエータへの圧油の供給を制御する制御弁と、前記制御弁を切換操作して前記油圧アクチュエータの作動を制御するため外部からの操作に従って電気信号を出力する電気式操作装置と、前記電気式操作装置からの前記電気信号に従って前記制御弁の油圧パイロット部に供給する前記パイロット圧を可変に制御するパイロット圧制御装置と、が備えられた作業機械用油圧制御装置に適用される。
そして、本発明が採用する構成の特徴は、前記パイロット圧制御装置は、前記パイロットポンプの吐出側に接続されるパイロット圧供給管路と、前記タンクに接続されるタンク管路と、前記パイロット圧供給管路に接続される第1ポンプポート、前記タンク管路に接続される第1タンクポートおよび前記制御弁の油圧パイロット部に接続される第1出力ポートを有し、前記電気信号に従って前記第1出力ポートを前記第1ポンプポートまたは第1タンクポートに選択的に接続し前記制御弁の切換制御を行う第1電磁弁と、前記パイロット圧供給管路に接続される第2ポンプポート、前記タンク管路に接続される第2タンクポートおよび第2出力ポートを有し、前記電気信号に従って前記第2出力ポートを前記第2ポンプポートまたは第2タンクポートに選択的に接続する第2電磁弁と、を含んで構成され、前記第2電磁弁は、前記パイロット圧制御装置内を流通する作動油の油温を上昇させるため前記第2ポンプポートから前記第2出力ポートに流れる圧油が前記タンク管路に還流される構成としたことにある。
上述の如く、本発明によれば、第2電磁弁は第2ポンプポートから第2出力ポートに流れる圧油をタンク管路に還流させる。これにより、パイロット圧制御装置内を流通する作動油の油温を上昇させることできる。このため、簡易な回路構成でパイロット圧制御装置(パイロット回路)のヒートシステムを実現でき、原動機の低温始動直後の暖機運転を効率的に行うことができる。また、作業機械の操作中でも、第1電磁弁と第2電磁弁とを切換制御することにより、所望の掘削作業等を中断させることなく、パイロット回路を暖機することができる。
以下、本発明の実施の形態による作業機械用油圧制御装置を、大型の油圧ショベルに適用した場合を例に挙げ、添付図面に従って詳細に説明する。
ここで、図1ないし図6は第1の実施の形態を示している。図1において、大型の油圧ショベル1は、種々の作業現場(一例として、鉱山の砕石場)で掘削作業を行うときに用いられる。この油圧ショベル1は、自走可能なクローラ式の下部走行体2と、該下部走行体2上に旋回装置3を介して旋回可能に搭載され、該下部走行体2と共に車体を構成する上部旋回体4と、該上部旋回体4の前側に俯仰動可能に設けられた後述の作業装置10とを含んで構成されている。上部旋回体4は、旋回フレーム5、建屋カバー6、キャブ7およびカウンタウエイト8を含んで構成されている。
作業装置10は、基端側が旋回フレーム5に俯仰動可能に取付けられたブーム10Aと、該ブーム10Aの先端側に俯仰動可能に取付けられたアーム10Bと、例えば土砂等の掘削作業を行うため該アーム10Bの先端側に回動可能に設けられた作業具としてのバケット10Cとを含んで構成されている。作業装置10のブーム10Aは、ブームシリンダ10Dにより旋回フレーム5に対して上,下に俯仰動され、アーム10Bは、ブーム10Aの先端側でアームシリンダ10Eにより上,下に俯仰動される。また、作業具としてのバケット10Cは、アーム10Bの先端側で作業具用シリンダとしてのバケットシリンダ10Fにより上,下に回動される。
図2に示すように、原動機としてのエンジン9により駆動されるメインの油圧ポンプ11は、タンク12内から吸込んだ作動油を高圧の圧油として吐出する。メインの油圧ポンプ11は、例えば可変容量型のアキシャルピストン式またはラジアルピストン式油圧ポンプからなり、タンク12と共にメインの油圧源を構成している。なお、油圧ポンプ11は、固定容量型の油圧ポンプであってもよい。
作業用の油圧シリンダ13は油圧アクチュエータの代表例を示している。この油圧シリンダ13は、例えば作業装置10に設けられるブームシリンダ10D、アームシリンダ10Eまたはバケットシリンダ10Fが該当する。油圧シリンダ13は、チューブ13A、ピストン13Bおよびロッド13Cを含んで構成されている。特に、大型の油圧ショベル1に用いる油圧シリンダ13は、そのシリンダ径が大きく、油圧ポンプ11から油圧シリンダ13に給排される圧油量(作動油量)も大きくなっている。
油圧シリンダ13は、チューブ13A内がピストン13Bにより2つの油室13D,13Eに画成され、ピストン13Bには、ロッド13Cの基端側が固着されている。ロッド13Cの先端側は、チューブ13A外に突出し、チューブ13A内に給排される圧油により伸長,縮小される。なお、油圧アクチュエータは、油圧シリンダ13に限らず、例えば油圧ショベル1の旋回用または走行用の油圧モータであってもよい。
制御弁としての方向制御弁14は、油圧シリンダ13用のコントロールバルブである。この方向制御弁14は、油圧ポンプ11、タンク12と油圧シリンダ13との間に設けられている。方向制御弁14は、例えば4ポート3位置の油圧パイロット式方向制御弁からなり、左,右両側には油圧パイロット部14A,14Bが設けられている。方向制御弁14の油圧パイロット部14A,14Bは、後述のパイロット圧制御装置21にパイロット管路15A,15Bを介して接続されている。
方向制御弁14は、パイロット圧制御装置21から油圧パイロット部14A,14Bにパイロット圧が供給されることにより、中立位置(I)から切換位置(II),(III)のいずれかに切換えられる。これにより、油圧シリンダ13の油室13D,13Eには、油圧ポンプ11からの圧油が一対の主管路16A,16Bを介して給排され、油圧シリンダ13のロッド13Cは、チューブ13Aに対して伸縮(駆動)される。このとき、油圧シリンダ13のボトム側の油室13Dとロッド側の油室13Eとに給排される圧油の流量は、方向制御弁14のストローク量(即ち、後述する操作レバー20Aの傾転操作量)に対応して可変に制御される。
パイロットポンプ17はタンク12と共にパイロット油圧源を構成している。このパイロットポンプ17は、エンジン9によりメインの油圧ポンプ11と一緒に回転駆動される。パイロットポンプ17の吐出側には、タンク12との間に低圧リリーフ弁18が設けられている。この低圧リリーフ弁18は、パイロットポンプ17の吐出圧力を予め決められたリリーフ設定圧以下に抑えるものである。
メインの油圧ポンプ11には、その吐出管路11Aとタンク12との間に高圧リリーフ弁19が設けられている。この高圧リリーフ弁19は、油圧ポンプ11に過剰圧が発生するのを防ぐため、油圧ポンプ11の吐出圧力を予め決められたリリーフ設定圧以下に抑える。このリリーフ設定圧は、低圧リリーフ弁18よりも十分に高い圧力に設定されている。
操作レバー装置20は、油圧シリンダ13を遠隔操作する電気式操作装置として構成されている。この操作レバー装置20は、油圧ショベル1のオペレータによって手動で傾転操作される操作レバー20Aを有している。操作レバー装置20は、操作レバー20Aの操作方向(矢示A,B方向)と操作量とに対応した電気信号を後述のコントローラ30を介して電磁式のパイロット圧制御装置21に出力する。
ここで、操作レバー装置20は、油圧ショベル1のキャブ7内に設けられている。一方、電磁式のパイロット圧制御装置21は、キャブ7から大きく離間した位置(例えば、方向制御弁14に近い位置)に配置される。即ち、操作レバー装置20は電気式操作装置であるため、パイロット圧制御装置21との間を電気配線(信号線)で接続すればよい。従って、両者間の距離は、必要に応じて数メートル以上に延ばすことができる。パイロット油圧配管の場合は、例えば1~2メートル以内の長さに制約される。
次に、電磁式のパイロット圧制御装置21と、当該パイロット圧制御装置21の暖機を行うためのヒート回路との具体的構成について説明する。
電磁式のパイロット圧制御装置21は、操作レバー装置20からの電気信号に対応(比例)したパイロット圧をパイロット管路15A,15Bに供給する第1電磁弁としての2つの第1電磁比例減圧弁22,23と、これらの第1電磁比例減圧弁22,23と共通の弁ハウジング24に設けられた第2電磁弁としての第2電磁比例減圧弁25と、パイロットポンプ17の吐出側に接続して設けられ、弁ハウジング24内へと延びたパイロット圧供給管路26と、弁ハウジング24からタンク12に向けて延び先端側がタンク12に接続されたタンク管路27と、後述の固定絞り33とを含んで構成されている。
2つの第1電磁比例減圧弁22,23は、互いに並列となるように弁ハウジング24内に配置され、前記電気信号に従って初期位置(a)から切換位置(b)に電磁比例して切換えられる。2つの第1電磁比例減圧弁22,23は、それぞれ弁ハウジング24内でパイロット圧供給管路26にそれぞれ接続される第1ポンプポート22A,23Aと、タンク管路27にそれぞれ接続される第1タンクポート22B,23Bと、方向制御弁14の油圧パイロット部14A,14Bに接続される第1出力ポート22C,23Cとをそれぞれ有している。
第1電磁比例減圧弁22,23のうち一方の電磁比例減圧弁22は、前記電気信号に従って初期位置(a)または切換位置(b)に切換えられる。これにより、第1出力ポート22Cが第1ポンプポート22Aまたは第1タンクポート22Bに選択的に接続される。即ち、操作レバー20Aが中立位置にある間、電磁比例減圧弁22は、電気信号が消磁(通電停止)されているので初期位置(a)となる。このときに第1出力ポート22Cは、第1ポンプポート22Aに対し遮断されて第1タンクポート22Bに接続される。このため、パイロット管路15A内のパイロット圧は、タンク圧に近い低圧状態に保持される。
しかし、操作レバー20Aが例えば矢示A方向に傾転操作され、前記電気信号が励磁(通電)状態になると、電磁比例減圧弁22は、このときの電流値に比例して初期位置(a)から切換位置(b)に電磁比例して切換わる。これにより、第1出力ポート22Cは第1ポンプポート22Aに接続される。この結果、パイロット管路15A内のパイロット圧は、操作レバー装置20からの電気信号(即ち、制御電流)に対応して増大され、方向制御弁14は、このときのパイロット圧に比例して中立位置(I)から切換位置(II)へと切換えられる。
第1電磁比例減圧弁22,23のうち他方の電磁比例減圧弁23は、前記電気信号に従って第1出力ポート23Cが第1ポンプポート23Aまたは第1タンクポート23Bに選択的に接続される。電磁比例減圧弁23は、操作レバー20Aが中立位置に戻されて電気信号が消磁されている間は初期位置(a)となる。これにより、第1出力ポート23Cは第1タンクポート23Bに接続される。このため、パイロット管路15B内のパイロット圧は、タンク圧に近い低圧状態に保持される。
しかし、操作レバー20Aが例えば矢示B方向に傾転操作され、前記電気信号が励磁されるようになると、電磁比例減圧弁23は、このときの電流値に比例して初期位置(a)から切換位置(b)に電磁比例して切換わる。これにより、第1出力ポート23Cは第1ポンプポート23Aに接続される。このため、パイロット管路15B内のパイロット圧は、操作レバー装置20からの電気信号(即ち、制御電流)に対応して増大され、方向制御弁14は、このときのパイロット圧に比例して中立位置(I)から切換位置(III)へと切換えられる。
方向制御弁14は、前述の如くパイロット圧が油圧パイロット部14A,14Bに供給されることにより、中立位置(I)から切換位置(II),(III)のいずれかに切換えられる。このため、油圧シリンダ13の油室13D,13Eには、油圧ポンプ11からの圧油が一対の主管路16A,16Bを介してそれぞれ給排され、油圧シリンダ13のロッド13Cは伸縮動作(駆動)される。このように、油圧シリンダ13の伸縮動作は、操作レバー装置20により電磁式のパイロット圧制御装置21(第1電磁比例減圧弁22,23)と方向制御弁14を介して遠隔操作される。
第2電磁比例減圧弁25は、2つの第1電磁比例減圧弁22,23と並列となるように共通の弁ハウジング24内に設けられている。第2電磁比例減圧弁25は、パイロット圧制御装置21のヒート回路を構成している。第2電磁比例減圧弁25は、コントローラ30からの電気信号により還流停止位置(c)から還流位置(d)に電磁比例して切換えられる。第2電磁比例減圧弁25は、弁ハウジング24内でパイロット圧供給管路26に接続される第2ポンプポート25Aと、同じく弁ハウジング24内でタンク管路27に接続される第2タンクポート25Bおよび第2出力ポート25Cとを有している。
第2電磁比例減圧弁25は、コントローラ30からの電気信号に従って還流停止位置(c)または還流位置(d)に切換えられる。これにより、第2出力ポート25Cは、第2ポンプポート25Aまたは第2タンクポート25Bに選択的に接続される。即ち、コントローラ30からの電気信号により還流停止位置(c)に戻されている間は、第2電磁比例減圧弁25は、パイロット圧制御装置21の弁ハウジング24内で作動油が流通(還流)するのを停止させる。
しかし、第2電磁比例減圧弁25がコントローラ30からの電気信号により還流停止位置(c)から還流位置(d)に切換えられたときには、第2出力ポート25Cは第2ポンプポート25Aに接続される。これにより、第2電磁比例減圧弁25は、パイロットポンプ17から吐出されるパイロット圧油をパイロット圧供給管路26、パイロット圧制御装置21の弁ハウジング24に流通させる。このときのパイロット圧油は、第2電磁比例減圧弁25の第2ポンプポート25Aから第2出力ポート25Cを介してタンク管路27に還流される。これにより、パイロット圧制御装置21の弁ハウジング24は、内部を流通するパイロット圧油(作動油)により熱エネルギを受けて温度上昇する。この結果、弁ハウジング24内では、作動油の油温を高い温度に維持することができる。
換言すると、第2電磁比例減圧弁25は、パイロット圧制御装置21を含めた方向制御弁14を切換操作するパイロット回路(特に、第1電磁比例減圧弁22,23)に対し、これらを加温するヒート回路の主要部を構成している。即ち、第2電磁比例減圧弁25は、パイロット圧制御装置21の弁ハウジング24内にタンク12内の暖油(後述のヒータ31で常に加温されている作動油)を循環させる。これにより、第2電磁比例減圧弁25は、パイロット回路(即ち、第1電磁比例減圧弁22,23を含む弁ハウジング24内の油圧回路)を暖機することができる。弁ハウジング24は、第1電磁比例減圧弁22,23と第2電磁比例減圧弁25と後述の固定絞り33との間で前記作動油の油温上昇による熱が伝えられるのを許す共通の熱伝導体を構成している。
温度センサ28は、例えばタンク管路27の途中に設けられた温度検出器である。温度センサ28は、パイロット圧制御装置21の弁ハウジング24からタンク管路27を介してタンク12へと戻される戻り油(作動油)の温度を検出する。また、圧力センサ29A,29Bは、パイロット管路15A,15B内のパイロット圧を個別に検出する検出器である。圧力センサ29Aは、第1電磁比例減圧弁22の第1出力ポート22Cと方向制御弁14の油圧パイロット部14Aとの間でパイロット管路15Aの途中に設けられている。圧力センサ29Bは、第1電磁比例減圧弁23の第1出力ポート23Cと方向制御弁14の油圧パイロット部14Bとの間でパイロット管路15Bの途中に設けられている。温度センサ28および圧力センサ29A,29Bによる検出信号は、コントローラ30に出力される。
コントローラ30は、例えばマイクロコンピュータ等により構成されている。このコントローラ30は、エンジン9の駆動情報、操作レバー装置20からの電気信号、温度センサ28および圧力センサ29A,29Bからの検出信号に従って第1電磁比例減圧弁22,23と第2電磁比例減圧弁25とを切換制御する制御手段を構成している。コントローラ30は、その入力側に、操作レバー装置20、温度センサ28、圧力センサ29A,29Bおよびエンジン9用の制御装置(図示せず)等が接続されている。コントローラ30の出力側は、第1電磁比例減圧弁22,23および第2電磁比例減圧弁25に接続されている。
コントローラ30は、例えば不揮発性メモリ,ROM,RAM等からなるメモリ30Aを有している。このメモリ30A内には、例えば暖機運転モードの制御処理を行うプログラム(図4参照)と、作業モードの制御処理を行うプログラム(図5参照)と、作動油の温度Tが適正な温度範囲にあるか否を判定するための第1の温度Ta、第2の温度Tb(Ta>Tb)と、方向制御弁14を切換操作する上でパイロット管路15A,15B内のパイロット圧(即ち、操作回路圧力)が所要の設定圧力P1に達しているか否かを判定するための圧力値とを含む情報が格納されている。
前記第1の温度Taは、例えば暖機運転時の目標となる温度と同様な温度に設定される。前記第2の温度Tbは、第1の温度Taよりも所定温度だけ低い温度であり、作動油の粘度上昇による応答性の低下が発生しない限界の温度に設定される。即ち、第2の温度Tbは、例えば操作レバー20Aの傾転操作に対してパイロット管路15A,15Bに発生するパイロット圧の応答性が低下する手前の温度に設定される。
また、前記設定圧力P1は、例えば操作レバー20Aが矢示A,B方向のいずれかに傾転操作されているか否かを判定するための圧力値である。第1電磁比例減圧弁22,23からパイロット管路15A,15Bに供給するパイロット圧(即ち、図6に示す操作回路圧力)の最高圧力値MAXに対して、前記設定圧力P1は、十分に低い圧力値(例えば、最高圧力値MAXの1/2以下の圧力値)に設定されている。この設定圧力P1は、例えばパイロット圧の圧力不足で方向制御弁14の切換操作(油圧ショベル1の操作)が出来なくなるような、操作に影響の出ない範囲の最低限の圧力に設定するのが好ましい。
寒冷地等で稼働する油圧ショベル1には、例えばタンク12にヒータ31が設けられている。このヒータ31は、タンク12内の作動油が適正な粘度となるように加温し、油温が所要の温度範囲となるように保温している。この温度範囲とは、例えば暖機運転時の目標となる温度に基づいて決められる。なお、リリーフ弁32は、油圧シリンダ13のボトム側の油室13Dに過剰圧が発生するのを防ぐため、油圧シリンダ13の油室13Dとタンク12との間で主管路16Aの途中に設けられている。
ここで、パイロット圧制御装置21の弁ハウジング24内には、タンク管路27の途中に位置して固定絞り33が設けられている。固定絞り33がない状態で、第1電磁比例減圧弁22,23と第2電磁比例減圧弁25との比例制御を行うと、これらの減圧弁による調圧機能の影響で圧力が安定しないことがある。これにより、例えば第2電磁比例減圧弁25にハンチングが発生する虞れがある。このため、固定絞り33は、弁ハウジング24内でタンク管路27の途中に設けるのがよい。なお、固定絞り33を設けない場合、第2電磁比例減圧弁25は電磁比例制御ではなく、ON-OFF制御するのが好ましい。即ち、第2電磁比例減圧弁25に代えて汎用性の高い電磁弁を用いることができる。
第1の実施の形態による大型の油圧ショベル1は、上述の如き構成を有するもので、次に、その作動について説明する。
まず、油圧ショベル1のオペレータは、上部旋回体4のキャブ7に搭乗し、エンジン9を始動して油圧ポンプ11とパイロットポンプ17を駆動する。これにより、油圧ポンプ11から吐出管路11Aに向けて圧油が吐出され、この圧油は方向制御弁14を介して油圧シリンダ13(例えば、図1に示すブームシリンダ10D)に供給される。また、これ以外の方向制御弁(図示せず)からは他の油圧アクチュエータ(例えば、図1に示すアームシリンダ10E、バケットシリンダ10F、旋回用油圧モータ、走行用油圧モータ等)へと供給される。
キャブ7に搭乗したオペレータが操作レバー20Aを操作したときに、パイロット圧制御装置21は、第1電磁比例減圧弁22または23が初期位置(a)から切換位置(b)に切換えられ、操作レバー装置20からの電気信号に対応(比例)したパイロット圧をパイロット管路15Aまたは15Bに供給する。このため、方向制御弁14は、中立位置(I)から切換位置(II),(III)のいずれか一方に切換えられ、油圧ポンプ11からの圧油は、方向制御弁14を介して油圧シリンダ13に供給される。これにより、油圧シリンダ13は、ロッド13Cがチューブ13Aから伸長または縮小され、作業装置10を俯仰動させて土砂の掘削作業等を行うことができる。
ところで、寒冷地で稼働する油圧ショベル1は、作動油の油温が低い温度まで下がると、作動油の粘度が高くなる。これにより、油圧ポンプ11およびパイロットポンプ17による作動油の吸込み性が悪くなり、作業機械としての作動を円滑に行うことが難しくなる。このため、作動油を貯留するタンク12にはヒータ31が設けられ、機械が休車している間に作動油の温度が所定温度以下まで下がらないように保温している。また、エンジン9の低温始動時においては暖機運転を実施し、油圧機器(例えば、油圧アクチュエータ)を暖めてから作業を開始するようにしている。
しかし、暖機運転後の油圧ショベル1の操作中には、パイロット回路(即ち、パイロット圧制御装置21)内の油循環が停止されることがあり、このときに機械の操作中でも雰囲気温度に影響されて油温が下がる。このため、パイロット圧制御装置21の弁ハウジング24等を加温しない限り、作動油の粘度が高くなって操作時の応答性が低下してしまう。
特に、車体重量が100t以上となる超大型の油圧ショベル1は、パイロットポンプ17の吐出側からパイロット回路の末端に設置してある第1電磁比例減圧弁22,23までの管路長が長い。これにより、第1電磁比例減圧弁22,23は、車体の熱源(例えば、エンジン9の位置)から遠く離れているため、周囲の雰囲気温度の影響を受け易くなる。また、パイロット圧制御装置21(パイロット回路)を循環する流量が少ない場合は、管路内の油温が雰囲気温度の影響を受け易い。これにより、寒冷地環境では前記パイロット回路を流れる作動油の粘度が高くなる。この結果、例えば第1電磁比例減圧弁22,23が電気信号の入力から動き出すまでの反応速度が遅くなり、前記パイロット回路側での操作応答性が低下し易い。
そこで、第1の実施の形態では、パイロット圧制御装置21の弁ハウジング24内に、第2電磁比例減圧弁25を2つの第1電磁比例減圧弁22,23と並列となるように設けている。この第2電磁比例減圧弁25は、コントローラ30からの電気信号により還流位置(d)に切換えられたときに、パイロットポンプ17から吐出されるパイロット圧油をパイロット圧供給管路26、パイロット圧制御装置21の弁ハウジング24内へと流通させる。これにより、前記弁ハウジング24内を流れるパイロット圧油は、タンク管路27からタンク12へと還流される。
これにより、第2電磁比例減圧弁25は、パイロット圧制御装置21の弁ハウジング24内にタンク12内の暖油(ヒータ31で常に加温されている作動油)を循環させることができる。このため、パイロット回路(即ち、第1電磁比例減圧弁22,23)は暖機され、パイロット管路15A,15Bに供給するパイロット圧油は、適正な温度と油粘度の状態に保つことができる。
図4は、コントローラ30による第2電磁比例減圧弁25の暖機運転モードにおける制御処理を示している。
即ち、暖機運転モードの制御処理が開始されると、ステップ1でエンジン9が始動されているか否か判定する。ステップ1で「NO」と判定する間はエンジン9が始動されていないので、制御処理を終了させる。ステップ1で「YES」と判定したときには、次のステップ2において、温度センサ28で検出したタンク管路27内の作動油の温度Tが、第1の温度Ta(例えば、暖機運転の設定温度)よりも低いか否かを判定する。
ステップ2で「YES」と判定したときには、作動油の温度Tが第1の温度Taに達していないので、次のステップ3でヒート回路最大開口に設定するため、パイロット圧制御装置21の弁ハウジング24内で第2電磁比例減圧弁25を還流停止位置(c)から還流位置(d)に切換える。これにより、図3に示すように、第2電磁比例減圧弁25は、第2ポンプポート25Aから第2出力ポート25Cを介してタンク管路27に還流される作動油の流量を最大流量とする。
このため、第2電磁比例減圧弁25は、パイロット圧制御装置21の弁ハウジング24内にタンク12内の暖油を循環させることができ、第1電磁比例減圧弁22,23を暖機して、弁の操作応答性が低下しないようにすることができる。次のステップ4ではリターンし、ステップ1以降の処理を繰返す。
一方、ステップ2で「NO」と判定したときには、作動油の温度Tが第1の温度Taに達しているので、次のステップ5ではヒート回路を閉じるように、第2電磁比例減圧弁25を還流停止位置(c)に戻す。これにより、パイロット圧制御装置21の弁ハウジング24内で作動油が流通(還流)するのを停止させ、作動油の温度Tが第1の温度Ta以上に過度に高くなるのを抑え、次のステップ4でリターンし、ステップ1以降の処理を繰返す。
図6中の特性線34~36で示すように、暖機運転モードである時間0~t1の間は、エンジン9の始動に伴ってコントローラ30からの電気信号により第2電磁比例減圧弁25が切換制御され、前述の如くヒート回路開口面積を最大(MAX)に設定する(特性線34参照)。これにより、温度センサ28で検出される作動油の温度Tは、特性線36の如く時間0~t1の間で漸次上昇し、第1の温度Ta(暖機運転の設定温度)まで上昇される。
なお、暖機運転モードでは、第2電磁比例減圧弁25を還流位置(d)に切換えると共に、2つの電磁比例減圧弁22,23を初期位置(a)から切換位置(b)に切換制御する構成としてもよい。このときに、パイロットポンプ17から吐出されるパイロット圧油は、パイロット圧供給管路26、第2電磁比例減圧弁25、タンク管路27を介してタンク12へと還流される。このため、2つの電磁比例減圧弁22,23を初期位置(a)から切換位置(b)に切換えたとしても、パイロット管路15A,15B内のパイロット圧は共に低い圧力となり、方向制御弁14が中立位置(I)から不用意に切換わることはない。しかし、パイロット管路15A,15B内に導かれた作動油を温度上昇させることは可能となる。
次に、コントローラ30による作業モードの制御処理を図5を参照して説明する。即ち、作業モードの制御処理が開始されると、ステップ11でエンジン9が稼動中であるか否か判定する。ステップ11で「NO」と判定する間はエンジン9が稼働されていないので、制御処理を終了させる。
ステップ11で「YES」と判定したときには、次のステップ12に移り、温度センサ28で検出したタンク管路27内の作動油の温度Tが、第2の温度Tbよりも低いか否か(即ち、操作レバー20Aの傾転操作に対してパイロット管路15A,15Bに発生するパイロット圧の応答性が低下する温度まで下がったか否か)を判定する。例えば、図6中の特性線36に示す如く、作業モードの時間t1~t2の間では、作動油の温度Tが第2の温度Tb以上となっているので、ステップ12では「NO」と判定される。この場合は、次のステップ13でリターンし、ステップ11以降の処理を続行する。
一方、ステップ12で「YES」と判定したときには、作動油の温度Tが第2の温度Tbよりも低くなっている。このため、ステップ14ではヒート回路開口量を増加させるため、第2電磁比例減圧弁25を還流停止位置(c)から還流位置(d)に切換え、還流位置(d)での開口量を漸次増加させる。これにより、例えば図6中の時間t2~t3間の特性線36に示すように、作動油の温度Tは第2の温度Tb以上に上昇される。
次のステップ15では、操作レバー20Aが傾転操作されているか否かを判定し、ステップ15で「NO」と判定したときには、操作レバー20Aが傾転操作されていないので、後述のステップ18に移る。ステップ15で「YES」と判定したときには、次のステップ16に移る。このステップ16では、圧力センサ29A,29Bで検出した操作回路圧力P(即ち、第1電磁比例減圧弁22,23からパイロット管路15A,15Bに供給する作業モードのパイロット圧)が設定圧力P1(図6中の特性線35参照)よりも低いか否かを判定する。ステップ16で「NO」と判定するときには、前記ステップ14に戻ってヒート回路開口量を前述の如く増加させる。一方、ステップ16で「YES」と判定するときには、次のステップ17に移ってヒート回路開口量を減少させる制御を行う。
ここで、第2電磁比例減圧弁25により、ヒート回路開口量を増加、減少させる制御について具体的に述べる。図2、図3に示すパイロット圧制御装置21において、第2電磁比例減圧弁25を還流停止位置(c)から還流位置(d)に切換え、還流位置(d)での開口量を大きく増加させた場合、パイロットポンプ17から吐出されるパイロット圧油は、パイロット圧供給管路26、パイロット圧制御装置21の弁ハウジング24内へと流通し、その大部分は、タンク管路27からタンク12に還流される。このため、第1電磁比例減圧弁22,23を初期位置(a)から切換位置(b)に切換えても、第1電磁比例減圧弁22から方向制御弁14の油圧パイロット部14Aに供給するパイロット圧(または、第1電磁比例減圧弁23から方向制御弁14の油圧パイロット部14Bに供給するパイロット圧)が圧力上昇することはない。この場合、パイロット管路15A,15B内のパイロット圧油は不足しがちになり、場合によっては、方向制御弁14の切換操作が難しくなって、油圧シリンダ13の伸縮操作が不可能となる。
そこで、このような場合には、前記ステップ16で「YES」と判定し、圧力センサ29A,29Bで検出した操作回路圧力Pが設定圧力P1以上となっていない操作状態(即ち、第1電磁比例減圧弁22,23のいずれか一方が初期位置(a)から切換位置(b)に切換えられた操作状態)であるので、次のステップ17でヒート回路の開口量を減少させる。換言すると、第2電磁比例減圧弁25の還流位置(d)での開口量を減少させる。これにより、第2電磁比例減圧弁25からタンク管路27を介してタンク12へと還流されるパイロット圧油の流量は減少する。このため、第1電磁比例減圧弁22または23から方向制御弁14の油圧パイロット部14Aまたは14Bに供給するパイロット圧油(即ち、操作回路圧力P)を増やすことができ、所要のパイロット圧を確保できる。
次のステップ18では、作動油の温度Tが第1の温度Taよりも低いか否かを判定し、ステップ18で「YES」と判定するときには、前記ステップ16に戻ってこれ以降の処理を続行する。しかし、ステップ18で「NO」と判定したときには、作動油の温度Tが第1の温度Ta以上となって、過剰に高い温度(オーバヒート)となるのを避けるため、次のステップ19に移ってヒート回路を閉じる制御を行う。即ち、第2電磁比例減圧弁25を還流位置(d)から還流停止位置(c)に戻すことによってヒート回路を閉じ、パイロット圧油の還流を停止させた状態で、ステップ13に移ってリターンする。
このように、コントローラ30による作業モードの制御処理が図5中のステップ12~19の如く実行される。このため、図6中の特性線34の如く、時間t1~t7間でヒート回路の開口面積が可変に制御される。これによって、温度センサ28で検出したタンク管路27内の作動油の温度Tは、特性線36で示すように、第1の温度Taと第2の温度Tbとの間の温度範囲(即ち、暖機温度の範囲)内に収められるように制御される。
また、圧力センサ29A,29Bで検出される操作回路圧力Pは、図6中の特性線35の如く段階的に制御され、例えば設定圧力P1以上の必要操作圧力(即ち、第1電磁比例減圧弁22または23から方向制御弁14の油圧パイロット部14Aまたは14Bに供給するパイロット圧)を確保することができる。このため、作業モード時に、作動油の温度を加温した状態に保ちつつ、第1電磁比例減圧弁22または23から方向制御弁14の油圧パイロット部14Aまたは14Bに供給するパイロット圧油が不足傾向となったりするのを防ぐことができ、油圧シリンダ13の伸縮操作(作業時に必要な動作)を続行することができる。
かくして、第1の実施の形態によれば、例えば寒冷地でのエンジン9の低温始動時直後に冷え切った車体を暖機する場合には、第2電磁比例減圧弁25によるヒート回路を最大開口とし、パイロット圧制御装置21の弁ハウジング24内を流れるパイロット圧油の流量を増やす。これによって、タンク12内の暖油を弁ハウジング24内に循環させることができる。この結果、パイロット回路(即ち、第1電磁比例減圧弁22,23)は暖機され、パイロット管路15A,15Bに供給するパイロット圧油を適正な温度と粘度状態に保つことができる。
また、暖機運転モード後の作業モードにおいても、タンク管路27側に設けた温度センサ28によりパイロット圧油の油温を常に監視し、第2電磁比例減圧弁25によるヒート回路の開口面積を状況に応じて調整することができる。これによって、方向制御弁14の操作に必要な最低限のパイロット圧(操作回路圧力)を、第1電磁比例減圧弁22,23の切換制御により確保することができる。しかも、パイロット圧制御装置21の暖機が可能となり、油温を所要温度に維持することができる。
また、暖機運転モードと作業モードとの切換えは、キャブ7(運転室)内のオペレータが、例えばスイッチ(図示せず)等で任意操作により自由に行えるようにすると良い。さらに、暖機運転モード時は、パイロット圧制御装置21の温度センサ28で検出する油温が、例えば第1の温度Ta等の設定温度に達した時点で、オペレータにモニタ等で報知するようにすれば、スムーズに作業モードに移行して現場作業を開始することができる。
従って、第1の実施の形態によれば、第2電磁比例減圧弁25は、第2ポンプポート25Aから第2出力ポート25Cに流れるパイロット圧油をタンク管路27に還流させる。これにより、パイロット圧制御装置21の弁ハウジング24内を流通する作動油の油温を上昇させることできる。このため、簡易な回路構成でパイロット圧制御装置21(パイロット回路)のヒートシステムを実現でき、エンジン9の低温始動直後の暖機運転を効率的に行うことができる。また、油圧ショベル1の操作中でも、第1電磁比例減圧弁22,23と第2電磁比例減圧弁25とは、切換制御される。これにより、作業を中断させることなくパイロット回路を暖機することができる。
しかも、第1の実施の形態で採用したパイロット圧制御装置21によると、第2電磁比例減圧弁25の下流側でタンク管路27の途中には、固定絞り33が設けられている。これにより、第2電磁比例減圧弁25の第2ポンプポート25Aから第2出力ポート25Cを介してタンク管路27に還流される作動油(戻り油)は、その流動(運動)エネルギが熱エネルギに固定絞り33で変換される。このため、パイロット圧制御装置21の弁ハウジング24内を流通する作動油の油温を上昇させ、パイロット圧制御装置21の暖機を良好に行うことできる。
また、この状態で第2電磁比例減圧弁25の上流側には、固定絞り33の抵抗分の圧力が発生する。このため、第1電磁比例減圧弁22,23側の圧力不足で操作不能となることを防ぐことができる。換言すると、固定絞り33は、機械の操作に影響のでない最低限の圧力を保証し、かつ流量を確保するように固定絞り径を設定することができる。これにより、固定絞り33は、安全装置としての役割を果たすことができる。
なお、前記第1の実施の形態では、固定絞り33をパイロット圧制御装置21の弁ハウジング24内に設ける場合を例に挙げて説明した。しかし、本発明はこれに限らず、例えば固定絞り33をパイロット圧制御装置21の弁ハウジング24外に位置してタンク管路27の途中に設ける構成としてもよい。
次に、図7および図8は第2の実施の形態を示している。本実施の形態では、前述した第1の実施の形態と同一の構成要素に同一の符号を付し、その説明を省略するものとする。しかし、第2の実施の形態の特徴は、制御弁を切換操作するためのパイロット圧制御装置を、上部旋回体4(車体)の熱源から離れた位置(例えば、作業装置10のブーム10A)で外側に露出した状態に設ける構成としたことにある。
図8に示すように、油圧シリンダ13の主管路16A,16B間には、ボトム側の油室13Dとロッド側の油室13Eとを短絡して連通させるように再生管路51が設けられている。この再生管路51の途中には、制御弁としての流量再生弁52とチェック弁53とが設けられている。流量再生弁52は、例えば2ポート2位置の油圧パイロット式切換弁により構成され、常時はばね52Bにより遮断位置(e)に置かれている。
流量再生弁52は、その油圧パイロット部52Aにパイロット管路54を介してパイロット圧が供給されると、ばね52Bに抗して遮断位置(e)から流量再生位置(f)に切換えられる。このとき、流量再生弁52は、油圧シリンダ13のボトム側の油室13Dから主管路16Aに向けて排出される圧油(戻り油)の一部を再生管路51、チェック弁53を介して主管路16B側に合流して流通させる。このときの圧油は、再生油となってロッド側の油室13Eに供給される。流量再生弁52は、油圧シリンダ13への圧油の供給を制御する制御弁を構成している。
電磁式のパイロット圧制御装置55は、流量再生弁52の油圧パイロット部52Aにパイロット管路54を介してパイロット圧を供給する第1電磁弁としての第1電磁比例減圧弁56と、この第1電磁比例減圧弁56と共通の弁ハウジング57に設けられた第2電磁弁としての第2電磁比例減圧弁58と、パイロットポンプ17の吐出側に接続して設けられ、弁ハウジング57内へと延びたパイロット圧供給管路59と、弁ハウジング57からタンク12に向けて延び先端側がタンク12に接続されたタンク管路60とを含んで構成されている。
パイロット圧制御装置55のパイロット圧供給管路59は、パイロット圧制御装置21のパイロット圧供給管路26から途中で分岐され、各パイロット圧供給管路26,59は共にパイロットポンプ17の吐出側にそれぞれ接続されている。パイロット圧制御装置55のタンク管路60も、パイロット圧制御装置21のタンク管路27から途中で分岐するように設けられ、各タンク管路27,60はそれぞれタンク12に接続されている。
第1電磁比例減圧弁56は、第2電磁比例減圧弁58と並列となるように弁ハウジング57内に配置され、後述するコントローラ64からの電気信号に従って初期位置(g)から切換位置(h)に電磁比例して切換えられる。第1電磁比例減圧弁56は、弁ハウジング57内でパイロット圧供給管路59に接続される第1ポンプポート56Aと、タンク管路60に接続される第1タンクポート56Bと、流量再生弁52の油圧パイロット部52Aに接続される第1出力ポート56Cとを有している。
第1電磁比例減圧弁56は、前記電気信号に従って初期位置(g)または切換位置(h)に切換えられることにより、第1出力ポート56Cが第1ポンプポート56Aまたは第1タンクポート56Bに選択的に接続される。即ち、コントローラ64からの電気信号が消磁(通電停止)されている間、第1電磁比例減圧弁56は初期位置(g)となり、このときに第1出力ポート56Cは、第1ポンプポート56Aに対し遮断されて第1タンクポート56Bに接続される。このために、パイロット管路54内のパイロット圧は、タンク圧に近い低圧状態に保持される。
しかし、コントローラ64からの電気信号が励磁(通電)状態になると、第1電磁比例減圧弁56は、このときの電流値に比例して初期位置(g)から切換位置(h)に電磁比例して切換わり、このときに第1出力ポート56Cは第1ポンプポート56Aに接続される。このため、パイロット管路54内のパイロット圧は前記電気信号(即ち、制御電流)に対応して増大され、流量再生弁52は、このときのパイロット圧に比例して遮断位置(e)から流量再生位置(f)へと切換えられる。
流量再生弁52は、このようにパイロット圧が油圧パイロット部52Aに供給されることにより、遮断位置(e)から流量再生位置(f)に切換えられる。このため、油圧シリンダ13のロッド13Cをチューブ13A内に縮小させるときには、油圧シリンダ13のボトム側の油室13Dから主管路16Aに排出される圧油(戻り油)の一部を再生管路51、チェック弁53を介して主管路16B側に流通させ、これを再生油としてロッド側の油室13Eへと供給することができる。これにより、流量損失が低減し、燃費効率が向上する。
第2電磁比例減圧弁58は、第1電磁比例減圧弁56と並列となるように共通の弁ハウジング57内に設けられている。第2電磁比例減圧弁58は、パイロット圧制御装置55のヒート回路の主要部を構成し、コントローラ64からの電気信号により還流停止位置(j)から還流位置(k)に電磁比例して切換えられる。第2電磁比例減圧弁58は、弁ハウジング57内でパイロット圧供給管路59に接続される第2ポンプポート58Aと、同じく弁ハウジング57内でタンク管路60に接続される第2タンクポート58Bおよび第2出力ポート58Cと、を有している。
第2電磁比例減圧弁58は、コントローラ64からの電気信号に従って還流停止位置(j)または還流位置(k)に切換えられることにより、第2出力ポート58Cが第2ポンプポート58Aまたは第2タンクポート58Bに選択的に接続される。即ち、第2電磁比例減圧弁58は、コントローラ64からの電気信号により還流停止位置(j)に戻されている間は、パイロット圧制御装置55の弁ハウジング57内で作動油が流通(還流)するのを停止させる。
しかし、第2電磁比例減圧弁58がコントローラ64からの電気信号により還流停止位置(j)から還流位置(k)に切換えられたときには、第2出力ポート58Cが第2ポンプポート58Aに接続される。これにより、第2電磁比例減圧弁58は、パイロットポンプ17から吐出されるパイロット圧油をパイロット圧供給管路59、パイロット圧制御装置55の弁ハウジング57に流通させつつ、第2電磁比例減圧弁58の第2ポンプポート58Aから第2出力ポート58Cを介してタンク管路60に還流させる。このとき、パイロット圧制御装置55の弁ハウジング57は、内部を流通するパイロット圧油(作動油)により熱エネルギを受けて温度上昇し、弁ハウジング57内で作動油の油温を高い温度に維持することができる。
換言すると、第2電磁比例減圧弁58は、流量再生弁52を切換操作するパイロット圧制御装置55を含めたパイロット回路(特に、第1電磁比例減圧弁56)に対し、これらを加温するヒート回路を構成している。即ち、第2電磁比例減圧弁58は、タンク12内の暖油をパイロット圧制御装置55の弁ハウジング57内へと循環させることにより、パイロット回路(即ち、第1電磁比例減圧弁56)を暖機することができる。弁ハウジング57は、第1電磁比例減圧弁56と第2電磁比例減圧弁58と間で前記作動油の油温上昇による熱が伝えられるのを許す共通の熱伝導体を構成している。
さらに、パイロット圧制御装置55には、第2電磁比例減圧弁58の第2出力ポート58Cとタンク管路60との間に、このタンク管路60に還流される戻り油の流量を制限する固定絞り61が設けられている。この固定絞り61は、前記第1の実施の形態で述べた固定絞り33と同様に構成されている。しかし、固定絞り61は、弁ハウジング57の外部に配置されている点で、第1の実施の形態とは相違している。なお、固定絞り61は、弁ハウジング57の内部に配置してもよく、このような設計変更は必要に応じて行うことができる。
ここで、第2の実施の形態で採用したパイロット圧制御装置55は、弁ハウジング57内に互いに並列に配置された第1電磁比例減圧弁56と第2電磁比例減圧弁58とが、共通の弁ハウジング57と共に作業装置10のブーム10Aに設けられている。これにより、流量再生弁52の油圧パイロット部52Aと第1電磁比例減圧弁56との間を接続するパイロット管路54の管路長を短くすることができる。図7に示すように、パイロット圧制御装置55の第1電磁比例減圧弁56、第2電磁比例減圧弁58および弁ハウジング57は、例えばブーム10Aの先端側に位置して、外側へと露出した状態で設けられている。
温度センサ62は、例えばタンク管路60の途中に設けられた温度検出器であり、パイロット圧制御装置55の弁ハウジング57からタンク管路60を介してタンク12へと戻される戻り油(作動油)の温度を検出する。また、圧力センサ63は、パイロット管路54内のパイロット圧を検出する検出器である。この圧力センサ63は、第1電磁比例減圧弁56の第1出力ポート56Cと流量再生弁52の油圧パイロット部52Aとの間でパイロット管路54の途中に設けられている。温度センサ62および圧力センサ63による検出信号は、コントローラ64に出力される。
コントローラ64は、第1の実施の形態で述べたコントローラ30とほぼ同様に構成されている。しかし、このコントローラ64は、パイロット圧制御装置21の制御に加えて、操作レバー装置20からの電気信号、温度センサ62および圧力センサ63からの検出信号に従って他のパイロット圧制御装置55を切換制御する点で、第1の実施の形態とは相違している。このため、コントローラ64は、その入力側に、操作レバー装置20、温度センサ28,62、圧力センサ29A,29B,63およびエンジン9用の制御装置(図示せず)が接続されている。コントローラ64の出力側は、前記第1の実施の形態で述べたパイロット圧制御装置21の第1電磁比例減圧弁22,23、第2電磁比例減圧弁25に加えて、パイロット圧制御装置55の第1電磁比例減圧弁56および第2電磁比例減圧弁58等に接続されている。
コントローラ64は、例えば不揮発性メモリ,ROM,RAM等からなるメモリ64Aを有している。このメモリ64A内には、例えば第1の実施の形態で述べた暖機運転モードの制御処理(図4参照)と、作業モードの制御処理を行うプログラム(図5参照)等に加えて、流量再生弁52を切換制御するためのプログラム(図示せず)、さらには、パイロット圧制御装置55を暖機するためのプログラム(図示せず)と、が格納されている。
かくして、このように構成される第2の実施の形態では、前述した第1の実施の形態と同様に、簡易な回路構成でパイロット圧制御装置21(パイロット回路)のヒートシステムを実現できると共に、パイロット圧制御装置55のヒートシステムを実現することができる。しかも、油圧ショベル1の操作中でも、第1電磁比例減圧弁56と第2電磁比例減圧弁58とを切換制御することにより、作業を中断させることなくパイロット管路54を暖機することができる。
図7に示すように、パイロット圧制御装置55の第1電磁比例減圧弁56、第2電磁比例減圧弁58および弁ハウジング57は、ブーム10Aの先端側に位置して、外側から取付けた状態で設けられている。これにより、流量再生弁52の油圧パイロット部52Aと第1電磁比例減圧弁56との間を接続するパイロット管路54の管路長を短くできるという利点がある。しかし、パイロット圧制御装置55の弁ハウジング57は、上部旋回体4(車体)の熱源から離れた位置にあり、ブーム10Aの外側に露出した状態で吹きさらしとなっている。このため、弁ハウジング57、パイロット圧供給管路59およびタンク管路60内の油温は、特に寒冷地での雰囲気温度の影響を受け、低い温度になり易い。
そこで、例えば寒冷地等でのエンジン9の低温始動時直後に冷え切った車体と作業装置10のブーム10A側等を暖機する場合には、第2電磁比例減圧弁58によるヒート回路は、最大開口となり、流量を増やす。これにより、パイロット圧制御装置55の弁ハウジング57内には、タンク12内の暖油を循環させることができる。この結果、パイロット回路(即ち、第2電磁比例減圧弁58により第1電磁比例減圧弁56と弁ハウジング57)を暖機して、弁の操作応答性が低下しないようにすることができる。従って、パイロット圧制御装置55の弁ハウジング57等を上部旋回体4(車体)の熱源から離れた位置で吹きさらしとなる位置に設けた場合でも、タンク12内の暖油は、弁ハウジング57内へと循環する。これにより、寒冷地での雰囲気温度の影響を受け易い箇所でも必要な暖機を効率的に行うことができる。
なお、前記第2の実施の形態では、パイロットポンプ17の吐出側にパイロット圧供給管路26,59を介してパイロット圧制御装置21と他のパイロット圧制御装置55とを設ける場合を例に挙げて説明した。しかし、本発明はこれに限るものではなく、例えばパイロット圧制御装置21は省略してもよく、他のパイロット圧制御装置55だけを設ける構成としてもよい。
また、前記第1の実施の形態では、パイロット圧制御装置21に第1電磁比例減圧弁22,23と第2電磁比例減圧弁25とを設ける場合を例に挙げて説明した。しかし、本発明はこれに限るものではなく、例えば第2電磁比例減圧弁25に替えて、より安価なON-OFF制御が可能な電磁弁を使用してもよい。同様に、前記第2の実施の形態で述べた他のパイロット圧制御装置55についても、第2電磁比例減圧弁58を安価なON-OFF制御が可能な電磁弁により構成してもよい。
さらに、前記各実施の形態では、作業機械として大型の油圧ショベル1を例に挙げて説明した。しかし、本発明はこれに限らず、例えば中型の油圧ショベル等に適用してもよい。さらにまた、油圧クレーン、ホイールローダ、ダンプトラック等の作業機械にも広く適用できるものである。
1 油圧ショベル(作業機械)
2 下部走行体
4 上部旋回体
9 エンジン(原動機)
10 作業装置
11 メインの油圧ポンプ
12 タンク
13 油圧シリンダ(油圧アクチュエータ)
14 方向制御弁(制御弁)
15A,15B,54 パイロット管路
17 パイロットポンプ
20 操作レバー装置(電気式操作装置)
20A 操作レバー
21,55 パイロット圧制御装置
22,23,56 第1電磁比例減圧弁(電磁弁)
22A,23A,56A 第1ポンプポート
22B,23B,56B 第1タンクポート
22C,23C,56C 第1出力ポート
24,57 弁ハウジング
25,58 第2電磁比例減圧弁(電磁弁)
25A,58A 第2ポンプポート
25B,58B 第2タンクポート
25C,58C 第2出力ポート
26,59 パイロット圧供給管路
27,60 タンク管路
28,62 温度センサ
29A,29B,63 圧力センサ
30,64 コントローラ
31 ヒータ
33,61 固定絞り
51 再生管路
52 流量再生弁(制御弁)
2 下部走行体
4 上部旋回体
9 エンジン(原動機)
10 作業装置
11 メインの油圧ポンプ
12 タンク
13 油圧シリンダ(油圧アクチュエータ)
14 方向制御弁(制御弁)
15A,15B,54 パイロット管路
17 パイロットポンプ
20 操作レバー装置(電気式操作装置)
20A 操作レバー
21,55 パイロット圧制御装置
22,23,56 第1電磁比例減圧弁(電磁弁)
22A,23A,56A 第1ポンプポート
22B,23B,56B 第1タンクポート
22C,23C,56C 第1出力ポート
24,57 弁ハウジング
25,58 第2電磁比例減圧弁(電磁弁)
25A,58A 第2ポンプポート
25B,58B 第2タンクポート
25C,58C 第2出力ポート
26,59 パイロット圧供給管路
27,60 タンク管路
28,62 温度センサ
29A,29B,63 圧力センサ
30,64 コントローラ
31 ヒータ
33,61 固定絞り
51 再生管路
52 流量再生弁(制御弁)
Claims (5)
- 作業機械の原動機によって駆動されタンクから作動油を吸込んで圧油を吐出するメインの油圧ポンプおよびパイロットポンプと、
前記作業機械に設けられ、前記油圧ポンプから供給される圧油によって駆動される油圧アクチュエータと、
前記油圧ポンプと前記油圧アクチュエータとの間に設けられ、前記パイロットポンプからのパイロット圧が油圧パイロット部に供給されることにより前記油圧アクチュエータへの圧油の供給を制御する制御弁と、
前記制御弁を切換操作して前記油圧アクチュエータの作動を制御するため外部からの操作に従って電気信号を出力する電気式操作装置と、
前記電気式操作装置からの前記電気信号に従って前記制御弁の油圧パイロット部に供給する前記パイロット圧を可変に制御するパイロット圧制御装置と、
が備えられた作業機械用油圧制御装置において、
前記パイロット圧制御装置は、
前記パイロットポンプの吐出側に接続されるパイロット圧供給管路と、
前記タンクに接続されるタンク管路と、
前記パイロット圧供給管路に接続される第1ポンプポート、前記タンク管路に接続される第1タンクポートおよび前記制御弁の油圧パイロット部に接続される第1出力ポートを有し、前記電気信号に従って前記第1出力ポートを前記第1ポンプポートまたは第1タンクポートに選択的に接続し前記制御弁の切換制御を行う第1電磁弁と、
前記パイロット圧供給管路に接続される第2ポンプポート、前記タンク管路に接続される第2タンクポートおよび第2出力ポートを有し、前記電気信号に従って前記第2出力ポートを前記第2ポンプポートまたは第2タンクポートに選択的に接続する第2電磁弁と、
を含んで構成され、
前記第2電磁弁は、前記パイロット圧制御装置内を流通する作動油の油温を上昇させるため前記第2ポンプポートから前記第2出力ポートに流れる圧油が前記タンク管路に還流される構成としたことを特徴とする作業機械用油圧制御装置。 - 前記第2電磁弁の前記第2出力ポートと前記タンク管路との間には、前記タンク管路に還流される戻り油の流量を制限する固定絞りが設けられていることを特徴とする請求項1に記載の作業機械用油圧制御装置。
- 前記タンク管路から前記タンクへと戻される戻り油の温度を検出する温度センサと、
前記第1電磁弁の第1出力ポートと前記制御弁の油圧パイロット部との間に設けられ前記パイロット圧を検出する圧力センサと、
前記原動機の駆動情報、前記電気式操作装置からの電気信号、前記温度センサおよび圧力センサからの検出信号に従って前記第1,第2電磁弁を制御するコントローラと、が備えられていることを特徴とする請求項1に記載の作業機械用油圧制御装置。 - 前記パイロット圧制御装置は、前記第1,第2電磁弁の間で前記作動油の油温上昇による熱が伝えられる共通の弁ハウジングを有していることを特徴とする請求項1に記載の作業機械用油圧制御装置。
- 前記パイロット圧制御装置は、前記第1,第2電磁弁と前記固定絞りとの間で前記作動油の油温上昇による熱が伝えられる共通の弁ハウジングを有していることを特徴とする請求項2に記載の作業機械用油圧制御装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-068216 | 2017-03-30 | ||
| JP2017068216A JP6663383B2 (ja) | 2017-03-30 | 2017-03-30 | 作業機械用油圧制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018179574A1 true WO2018179574A1 (ja) | 2018-10-04 |
Family
ID=63674761
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/041316 WO2018179574A1 (ja) | 2017-03-30 | 2017-11-16 | 作業機械用油圧制御装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6663383B2 (ja) |
| WO (1) | WO2018179574A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7026657B2 (ja) * | 2019-03-26 | 2022-02-28 | 日立建機株式会社 | 建設機械の油圧回路 |
| CN110513361A (zh) * | 2019-09-02 | 2019-11-29 | 柳州柳工挖掘机有限公司 | 工程机械液压系统及液压油升温控制方法 |
| JP2021156340A (ja) * | 2020-03-26 | 2021-10-07 | 日立建機株式会社 | 作業車両 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62246606A (ja) * | 1986-04-17 | 1987-10-27 | Yutani Heavy Ind Ltd | 作業機の油圧パイロツトパルプ装置 |
| JP2000220768A (ja) * | 1999-02-01 | 2000-08-08 | Zexel Corp | 電磁弁ユニットの昇温回路 |
-
2017
- 2017-03-30 JP JP2017068216A patent/JP6663383B2/ja active Active
- 2017-11-16 WO PCT/JP2017/041316 patent/WO2018179574A1/ja active Application Filing
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62246606A (ja) * | 1986-04-17 | 1987-10-27 | Yutani Heavy Ind Ltd | 作業機の油圧パイロツトパルプ装置 |
| JP2000220768A (ja) * | 1999-02-01 | 2000-08-08 | Zexel Corp | 電磁弁ユニットの昇温回路 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6663383B2 (ja) | 2020-03-11 |
| JP2018169004A (ja) | 2018-11-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11168462B2 (en) | Control method for hydraulic system in work machine | |
| JP6785203B2 (ja) | 建設機械 | |
| US9932993B2 (en) | System and method for hydraulic energy recovery | |
| JP5809544B2 (ja) | 暖機システム | |
| US20100186401A1 (en) | Method and hydraulic control system for supplying pressure medium to at least one hydraulic consumer | |
| WO2008121203A1 (en) | Hydrostatic drive system with variable charge pump | |
| US20160032949A1 (en) | Slewing drive apparatus for construction machine | |
| WO2018179574A1 (ja) | 作業機械用油圧制御装置 | |
| JP7026657B2 (ja) | 建設機械の油圧回路 | |
| JP5809545B2 (ja) | 暖機システム | |
| JP5097051B2 (ja) | 建設機械の油圧制御装置 | |
| KR20190109549A (ko) | 건설기계의 제어 시스템 및 건설기계의 제어 방법 | |
| JP6285854B2 (ja) | 作業車両 | |
| JP7141592B2 (ja) | 油圧システム用の低ノイズ制御アルゴリズム | |
| JP2002038536A (ja) | 建設機械のカットオフ制御装置 | |
| KR20210038957A (ko) | 작업 기계 | |
| JP6618445B2 (ja) | 作業車両用油圧制御装置 | |
| JP2008303053A (ja) | 産業車両の油圧制御装置 | |
| EP3870861B1 (en) | Method for controlling a hydraulic system of a working machine | |
| EP3959383B1 (en) | A hydraulic system and a method for controlling a hydraulic system of a working machine | |
| JP2017187116A (ja) | 作業機の油圧システム | |
| US20240328122A1 (en) | Hydraulic system of working machine and working machine | |
| KR101693821B1 (ko) | 중장비용 에너지 절감형 유압장치 및 그 제어방법 | |
| CN120100778A (zh) | 液压系统的增强的电气控制 | |
| JP2003042105A (ja) | 高所作業車の油圧回路 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17903224 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 17903224 Country of ref document: EP Kind code of ref document: A1 |