WO2018078879A1 - 作業車両 - Google Patents
作業車両 Download PDFInfo
- Publication number
- WO2018078879A1 WO2018078879A1 PCT/JP2016/082343 JP2016082343W WO2018078879A1 WO 2018078879 A1 WO2018078879 A1 WO 2018078879A1 JP 2016082343 W JP2016082343 W JP 2016082343W WO 2018078879 A1 WO2018078879 A1 WO 2018078879A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- disk
- blade
- vehicle
- blade disk
- work
- Prior art date
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- A01D34/01—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus
- A01D34/412—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters
- A01D34/63—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters having cutters rotating about a vertical axis
- A01D34/73—Cutting apparatus
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- A01D34/01—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus
- A01D34/412—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters
- A01D34/63—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters having cutters rotating about a vertical axis
- A01D34/82—Other details
- A01D34/826—Noise reduction means
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- A01D34/01—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus
- A01D34/412—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters
- A01D34/63—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters having cutters rotating about a vertical axis
- A01D34/73—Cutting apparatus
- A01D34/733—Cutting-blade mounting means
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D2101/00—Lawn-mowers
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- A01D34/006—Control or measuring arrangements
- A01D34/008—Control or measuring arrangements for automated or remotely controlled operation
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- A01D34/01—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus
- A01D34/412—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters
- A01D34/63—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having rotating cutters having cutters rotating about a vertical axis
- A01D34/76—Driving mechanisms for the cutters
- A01D34/78—Driving mechanisms for the cutters electric
Definitions
- Patent Document 1 has a disadvantage that the working noise increases due to the vibration of the blade disk when the cutting width is defined by the rotating diameter of the blade or when the rotating diameter of the blade is increased in order to increase the cutting width. It was.
- an object of the present invention is to provide a work vehicle that eliminates the inconveniences described above and suppresses working noise even when the blade rotating diameter of the working part is increased.
- FIG. 1 is a conceptual diagram generally showing a work vehicle according to an embodiment of the present invention
- FIG. 2 is a top view of the work vehicle of FIG. 1
- FIG. 3 is a plan view of a work area where the work vehicle of FIG. is there.
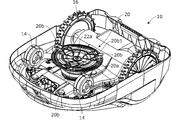
- a lawn mowing working part (blade, specifically a rotary blade; hereinafter referred to as “working part”) 20 is attached near the center position of the chassis 12a of the vehicle 10, and an electric motor (prime motor. 22) (referred to as “motor”).
- the working unit 20 is connected to the work motor 22 and is rotationally driven by the work motor 22.
- the working unit 20 is connected to a working unit height adjusting mechanism 24 that can be manually operated by the user.
- the working unit height adjusting mechanism 24 includes a handle that can be operated by the user, and is configured such that the vertical height of the working unit 20 from the ground contact surface GR can be adjusted by turning the handle by hand.
- An on-board charging unit 30 and an on-board battery (battery) 32 connected to the on-board charging unit 30 are stored in the rear portion of the vehicle 10, and a pair of battery charging terminals 34 are attached to the chassis 12a so as to protrude forward of the front end position. .
- the battery charging terminal 34 is connected to the on-board charging unit 30.
- the work motor 22 and the travel motor 26 are also connected to the on-board battery 32 and are energized from the on-board battery 32.
- two left and right magnetic sensors 36L and 36R are disposed on the front side of the vehicle body 12, and one magnetic sensor 36C is disposed on the rear side, and each indicates a magnetic field magnitude (magnetic field strength). Is output.
- a storage box is provided near the central position of the chassis 12a.
- a microcomputer including a CPU, an I / O, a memory (ROM, EEPROM, RAM) and the like is provided on the circuit board 42 stored in the storage box.
- An electronic control unit (Electronic Control Unit, hereinafter referred to as “ECU”) 44 is mounted.
- an angular velocity sensor 46 that generates an output indicating an angular velocity (yaw rate) around the z axis (gravity axis) of the center of gravity of the vehicle 10 in the vicinity of the ECU 44, and x, y acting on the vehicle 10.
- An acceleration sensor 50 that generates an output indicating the acceleration in the three orthogonal directions of the z axis
- an azimuth sensor 52 that generates an output indicating the absolute direction according to the geomagnetism
- a GPS sensor 54 is provided that produces an output indicative of
- the outputs of sensors such as the magnetic sensor 36, the contact sensor 40, and the angular velocity sensor 46 and the outputs of switches such as the main switch 64 are sent to the ECU 44.
- the ECU 44 controls the traveling of the vehicle 10 by energizing the traveling motor 26 from the on-board battery 32 based on those outputs and outputting a control value to control the operation of the traveling motor 26.
- FIG. 5 is an enlarged view of the main part of FIG. 4, FIG. 6 is a sectional view taken along the line VI-VI of FIG. 5, and FIG. 7 is a blade disk 20a when a part of a member (second disk 80 described later) is removed from FIG.
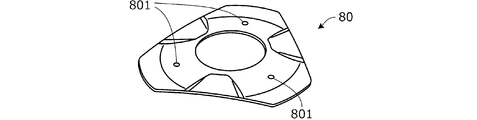
- FIG. 8 is a perspective view of a part of the members. The blade 20b is not shown in FIGS.
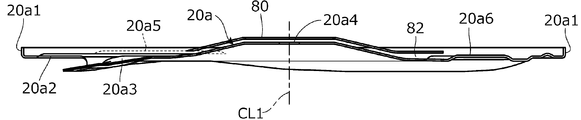
- the second disk 80 has a substantially equilateral triangular shape in plan view, and the second disk 80 has a fixed position of 120 degrees equally spaced corresponding to three vertices of the equilateral triangle, More specifically, it is fixed to the blade disk 20a by welding (for example, spot welding or welding) at a fixed position 801 at equal intervals of 120 degrees near the three apexes.
- welding for example, spot welding or welding
- FIG. 6 there is a residual space between the blade disk 20a and the second disk 80 locally, more precisely, except for three equally spaced fixed positions 801 (not shown in FIG. 6).
- a space 82 communicating with the outside is formed between the part, that is, the peripheral edge of the second disk 80 and the blade disk 20a.
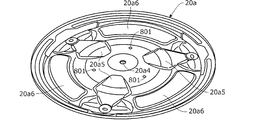
- a plurality of convex portions are formed on the surface of the blade disk 20a. That is, on the surface of the blade disk 20a, three first convex portions 20a5 having a generally rhombus shape in plan view are formed at equal intervals of 120 degrees around the central hole 20a4 through which the axis CL1 passes. Is done.
- a second convex portion 20a6 having a substantially rectangular shape in plan view extends between the formation positions of the first convex portions 20a5 in the circumferential direction so as to extend along the circumferential direction. Are formed at equal intervals. Accordingly, the first convex portion 20a5 and the second convex portion 20a6 are configured to increase the rigidity of the blade disk 20a.
- the second disk 80 has a substantially equilateral triangular shape in plan view, and the second disk 80 is provided on the blade disk 20a at fixed positions 801 at equal intervals corresponding to the apexes of the triangle.
- a space 82 that is locally communicated to the outside is formed between the blade disk 20a and the second disk 80, and the space can be operated to reduce high-frequency noise. It can be effectively suppressed.
- the second disk 80 is brought into contact with all of the three first convex portions 20a5, it may be one of the three, and further, may be brought into contact with all or a part of the second convex portion 20a6. May be.
- the second disk 80 is fixed to the blade disk 20a by welding at the fixing position 801.
- the second disk 80 is not limited to this, and may be fixed with a fastener such as a bolt or a screw or caulking.
- the number of the first protrusions 20a5 and the second protrusions 20a6 is three, the number of the first protrusions 20a5 and the second protrusions 20a6 may be two or four or more.
- the vehicle 10 is not restricted to that kind of vehicle, Any vehicle may be used.
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Environmental Sciences (AREA)
- Harvester Elements (AREA)
Abstract
Description
Claims (3)
- シャシに搭載される原動機の出力軸に連結される回転軸を中心として回転可能な円形の1個のブレードディスクと、前記ブレードディスクの円周に相互に離間した等間隔位置で取り付けられる複数個のブレードとからなる芝刈り作業部を備えた作業車両において、前記芝刈り作業部のブレードディスクの面上の中央に1個の第2ディスクを相互に離間した位置で設けたことを特徴とする作業車両。
- 前記第2ディスクは平面視において大略正三角形状を呈すると共に、前記第2ディスクを前記三角形状の頂点に相当する等間隔の固定位置で前記ブレードディスクに設けたことを特徴とする請求項1記載の作業車両。
- 前記ブレードディスクの面上に複数個の凸部が形成されると共に、前記第2ディスクを前記複数個の凸部の少なくともいずれかに当接するように前記ブレードディスクに設けたことを特徴とする請求項1または2記載の作業車両。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP16920291.8A EP3469873B1 (en) | 2016-10-31 | 2016-10-31 | Utility vehicle |
| CN201680085254.5A CN109068586A (zh) | 2016-10-31 | 2016-10-31 | 作业车辆 |
| US16/317,295 US10874051B2 (en) | 2016-10-31 | 2016-10-31 | Utility vehicle with noise inhibition |
| JP2018547097A JP6802852B2 (ja) | 2016-10-31 | 2016-10-31 | 作業車両 |
| PCT/JP2016/082343 WO2018078879A1 (ja) | 2016-10-31 | 2016-10-31 | 作業車両 |
| AU2016428302A AU2016428302B2 (en) | 2016-10-31 | 2016-10-31 | Working vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2016/082343 WO2018078879A1 (ja) | 2016-10-31 | 2016-10-31 | 作業車両 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018078879A1 true WO2018078879A1 (ja) | 2018-05-03 |
Family
ID=62023274
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/082343 WO2018078879A1 (ja) | 2016-10-31 | 2016-10-31 | 作業車両 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10874051B2 (ja) |
| EP (1) | EP3469873B1 (ja) |
| JP (1) | JP6802852B2 (ja) |
| CN (1) | CN109068586A (ja) |
| AU (1) | AU2016428302B2 (ja) |
| WO (1) | WO2018078879A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20210022292A1 (en) * | 2018-04-09 | 2021-01-28 | Vitirover | Robot and method for controlling the robot |
| DE102021100122A1 (de) | 2020-01-09 | 2021-07-15 | Honda Motor Co., Ltd. | Steckenbleib-freikomm-vorrichtung für eine roboter-arbeitsmaschine |
| DE102021100121A1 (de) | 2020-01-09 | 2021-07-15 | Honda Motor Co., Ltd. | Steckenbleib-bestimmungsvorrichtung für eine roboter-arbeitsmaschine |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220289045A1 (en) * | 2021-03-10 | 2022-09-15 | Techtronic Cordless Gp | Lawnmowers |
| US20220294242A1 (en) * | 2021-03-10 | 2022-09-15 | Techtronic Cordless Gp | Lawnmowers |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS428979Y1 (ja) * | 1963-10-07 | 1967-05-15 | ||
| JPS5816014U (ja) * | 1981-07-24 | 1983-02-01 | 三菱重工業株式会社 | 刈払機 |
| JPS6325960Y2 (ja) * | 1982-12-08 | 1988-07-14 | ||
| JP3966834B2 (ja) * | 2003-05-14 | 2007-08-29 | 株式会社クボタ | ディスク形ブレード |
| JP2016185091A (ja) * | 2015-03-27 | 2016-10-27 | 本田技研工業株式会社 | 芝刈機 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2471367A (en) * | 1945-10-01 | 1949-05-24 | James D Cavaness | Lawn mower |
| DE2635807A1 (de) * | 1976-08-09 | 1978-02-16 | Ering Metallwaren | Messeranordnung fuer einen motorisch angetriebenen sichel-rasenmaeher |
| US4114354A (en) * | 1976-11-05 | 1978-09-19 | Outboard Marine Corporation | Lawn mower blade mounting |
| AU515003B2 (en) * | 1977-07-12 | 1981-03-12 | Commonwealth Scientific And Industrial Research Organisation | Grass mower |
| US4254607A (en) * | 1979-08-21 | 1981-03-10 | Deere & Company | Low noise producing lawn mower blade |
| JPS5816014A (ja) | 1981-07-22 | 1983-01-29 | Kobe Steel Ltd | 低燐高炭素鋼の製造法 |
| JPH0928154A (ja) * | 1995-07-21 | 1997-02-04 | Tokai Kogyo Kk | 刈払機用刈刃 |
| US6112416A (en) * | 1997-12-16 | 2000-09-05 | Bridges; Roy | Weed and grass trimmer attachment head |
| JP3703734B2 (ja) * | 2001-04-19 | 2005-10-05 | 本田技研工業株式会社 | 芝刈機のカッタブレード |
| FR2835393B1 (fr) * | 2002-02-05 | 2004-05-14 | Christophe Lays | Lame a effet mulcheur pour debroussailleuse portable |
| US6817102B2 (en) * | 2002-04-23 | 2004-11-16 | David Harris | Trimmer head |
| JP2006067918A (ja) * | 2004-09-02 | 2006-03-16 | Honda Motor Co Ltd | 芝刈機 |
| JP6243273B2 (ja) * | 2014-03-27 | 2017-12-06 | 本田技研工業株式会社 | 芝刈機 |
| JP6307748B2 (ja) | 2014-10-21 | 2018-04-11 | 本田技研工業株式会社 | 自律走行作業車の制御装置 |
| CA2983595A1 (en) * | 2015-05-27 | 2016-12-01 | Mtd Products Inc | Self-cleaning mower blade assembly |
| AU2017252287B2 (en) * | 2016-04-20 | 2019-10-24 | Mtd Products Inc | Low-energy blade system having a quick-attach mechanism |
-
2016
- 2016-10-31 JP JP2018547097A patent/JP6802852B2/ja active Active
- 2016-10-31 EP EP16920291.8A patent/EP3469873B1/en active Active
- 2016-10-31 US US16/317,295 patent/US10874051B2/en active Active
- 2016-10-31 WO PCT/JP2016/082343 patent/WO2018078879A1/ja unknown
- 2016-10-31 AU AU2016428302A patent/AU2016428302B2/en active Active
- 2016-10-31 CN CN201680085254.5A patent/CN109068586A/zh active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS428979Y1 (ja) * | 1963-10-07 | 1967-05-15 | ||
| JPS5816014U (ja) * | 1981-07-24 | 1983-02-01 | 三菱重工業株式会社 | 刈払機 |
| JPS6325960Y2 (ja) * | 1982-12-08 | 1988-07-14 | ||
| JP3966834B2 (ja) * | 2003-05-14 | 2007-08-29 | 株式会社クボタ | ディスク形ブレード |
| JP2016185091A (ja) * | 2015-03-27 | 2016-10-27 | 本田技研工業株式会社 | 芝刈機 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3469873A4 * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20210022292A1 (en) * | 2018-04-09 | 2021-01-28 | Vitirover | Robot and method for controlling the robot |
| DE102021100122A1 (de) | 2020-01-09 | 2021-07-15 | Honda Motor Co., Ltd. | Steckenbleib-freikomm-vorrichtung für eine roboter-arbeitsmaschine |
| DE102021100121A1 (de) | 2020-01-09 | 2021-07-15 | Honda Motor Co., Ltd. | Steckenbleib-bestimmungsvorrichtung für eine roboter-arbeitsmaschine |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3469873A1 (en) | 2019-04-17 |
| AU2016428302B2 (en) | 2019-12-05 |
| US20190289785A1 (en) | 2019-09-26 |
| EP3469873B1 (en) | 2022-08-10 |
| CN109068586A (zh) | 2018-12-21 |
| JPWO2018078879A1 (ja) | 2019-09-12 |
| US10874051B2 (en) | 2020-12-29 |
| JP6802852B2 (ja) | 2020-12-23 |
| AU2016428302A1 (en) | 2019-02-14 |
| EP3469873A4 (en) | 2019-10-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2018078879A1 (ja) | 作業車両 | |
| EP3227169B1 (en) | All wheel drive robotic mower | |
| JP5859869B2 (ja) | 芝刈り機 | |
| JP6193898B2 (ja) | 自律走行作業車の制御装置 | |
| JP5973609B1 (ja) | 無人作業車の制御装置 | |
| JP5798228B2 (ja) | 乗用草刈機 | |
| WO2018100659A1 (ja) | 自律走行車両 | |
| JP2013165588A (ja) | 無人走行作業車の制御装置 | |
| JP2016186750A (ja) | 無人作業車の制御装置 | |
| JP2016186751A (ja) | 無人作業車の制御装置 | |
| US10881047B2 (en) | Robot mower with protruding blades | |
| JP6612020B2 (ja) | 作業車の駆動輪 | |
| JP4904600B2 (ja) | 回転体付き車輪及びそれを備えた全方向移動車輌 | |
| WO2023119407A1 (ja) | 駆動操舵制御システム、組込式駆動操舵ユニットシステム、組込式駆動操舵ユニット及び自動運転地上車両 | |
| JP6976234B2 (ja) | 作業機 | |
| JP7046366B2 (ja) | 自律制御型草刈機 | |
| JP6869133B2 (ja) | 作業機 | |
| JP2015181473A (ja) | 芝刈り車両 | |
| JP2023149133A (ja) | 自律走行式草刈機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16920291 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2018547097 Country of ref document: JP Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 2016920291 Country of ref document: EP Effective date: 20190110 |
|
| ENP | Entry into the national phase |
Ref document number: 2016428302 Country of ref document: AU Date of ref document: 20161031 Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |